matrices 2º bachiller
TRANSCRIPT
Colegio Vizcaya Matemáticas II
UNIDAD DIDÁCTICA 1
MATRICES 2º BACHILLER
Colegio Vizcaya Matemáticas II
2
OBJETIVOS DIDÁCTICOS
1. Reconocer informaciones que se puedan representar mediante matrices. 2. Operar con matrices.
3. Reconocer características especiales de las operaciones con matrices,
atendiendo a sus propiedades.
4. Resolver ecuaciones y sistemas de ecuaciones matriciales.
5. Resolver ecuaciones y sistemas de ecuaciones matriciales.
CONCEPTOS
1. Definición de matriz. Tipos de matrices. 2. Operaciones con matrices: suma, producto por un escalar, producto de
matrices y potencias (método de inducción). Propiedades. 3. Matriz inversa: definición y cálculo directo. 4. Ecuaciones y sistemas matriciales.

Colegio Vizcaya Matemáticas II
3
MATRICES
1. DEFINICIÓN Se llama matriz a todo conjunto de nos reales ordenados en una tabla de m filas y n columnas expresada entre paréntesis. Se representa por una letra mayúscula A, B… o como (aij), (bij)… Ejemplos:
A = ⎟⎟⎠
⎞⎜⎜⎝
⎛ −413102
B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
214213100
En general, cualquier matriz es de la forma:
A =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
mn3m2m1m
n2232221
n1131211
a...aaa...............a...aaaa...aaa
• Cada aij indica el elemento correspondiente a la fila i y la columna j. (El
primer subíndice indica fila y el segundo columna) • Si la matriz tiene m filas y n columnas, se dice que es de orden o
dimensión mxn. Consta de m·n elementos.
• Dos matrices A y B son iguales si tienen la misma dimensión y coinciden término a término.
A = (aij) A = B ⇔ aij = bij
B = (bij)
2. TIPOS DE MATRICES
2.1 Matriz Fila: Consta de una sola fila, es decir, es de orden 1xn.
Ejemplo: A = ( )101 −
Ejemplos:
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
150131
es una matriz de orden 3x2 y contiene 6 elementos.
B = ( )31 − es de orden 1x2

Colegio Vizcaya Matemáticas II
4
2.2 Matriz Columna: Consta de una sola columna, es decir es de orden mx1.
Ejemplo: B = ⎟⎟⎠
⎞⎜⎜⎝
⎛− 13
2.3 Matriz Cuadrada: Una matriz cuadrada es aquella que tiene el mismo nº
de filas que de columnas, esto es, es de orden nxn aunque se expresa únicamente n. En caso contrario se llama rectangular.
Ejemplo: C = ⎟⎟⎠
⎞⎜⎜⎝
⎛− 23
141
matriz de orden 2
En las matrices cuadradas se llama diagonal principal a la formada por los elementos a11, a22, …, ann . La otra diagonal se llama diagonal secundaria y está formada por los aij tales que i+j = n+1.
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
333231
232221
131211
aaaaaaaaa
Diagonal Secundaria Diagonal Principal
2.4 Matriz Traspuesta de A: Dada una matriz A, se define su matriz
traspuesta y se escribe At, como aquella que se obtiene cambiando en A filas por columnas.
Ejemplo: A= ⎟⎟⎠
⎞⎜⎜⎝
⎛ −502131
A t = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
− 510321
Se observa que si A es de orden mxn, At será de orden nxm.
2.5 Matriz simétrica: Toda matriz cuadrada que coincide con su traspuesta, es decir: A = At o bien aij = aji ij∀
Ejemplo: A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−−
135321513
Comprueba que coincide con su traspuesta y observa que se produce una simetría respecto a la diagonal principal.

Colegio Vizcaya Matemáticas II
5
2.6 Matriz Hemisimétrica o Antisimétrica: Toda matriz cuadrada que coincide con la opuesta de su traspuesta: A = -At
Ejemplo: A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−
035301510
2.7 Matriz Nula: Todos sus elementos son iguales a 0. Existe una para cada orden. Se representa O mxn
Ejemplo: O 3x2 = ⎟⎟⎠
⎞⎜⎜⎝
⎛000000
O2 = ⎟⎟⎠
⎞⎜⎜⎝
⎛0000
2.8 Matriz Diagonal: Toda matriz cuadrada en la que los elementos que no
pertenecen a la diagonal principal son 0, es decir aij = 0 ji ≠∀
Ejemplo: A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
300000002
2.9 Matriz Unidad/ Identidad: Toda matriz diagonal donde los elementos de la diagonal son iguales a 1. Se representa I o In
Ejemplo: I 2 = ⎟⎟⎠
⎞⎜⎜⎝
⎛1001
I 3 = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
100010001
2.10 Matriz Triangular Superior: Toda matriz cuadrada en la que los elementos situados por debajo de la diagonal principal son iguales a 0.
Ejemplo: B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
200110031
2.11 Matriz Triangular Inferior: Toda matriz cuadrada en la que los
elementos situados por encima de la diagonal principal son iguales a 0.
Ejemplo: A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
745031001

Colegio Vizcaya Matemáticas II
6
3. OPERACIONES CON MATRICES
3.1 SUMA Y RESTA Definición: Dadas dos matrices A = (aij) y B = (bij) del mismo orden mxn, se
define su suma como otra matriz del mismo orden, cuyos elementos se obtienen sumando los respectivos elementos de A y B que se encuentran en el mismo lugar, es decir
(aij) + (bij) = ( aij + bij)
Ejemplo: ⎟⎟⎠
⎞⎜⎜⎝
⎛− 501
312 + ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −061734
= ⎟⎟⎠
⎞⎜⎜⎝
⎛ −560446
Propiedades
1. Asociativa: (A + B) + C = A + (B + C) 2. Conmutativa: A + B = B + A
3. Elemento Neutro: La matriz nula O del mismo orden (A+O = O+A = A) 4. Elemento Opuesto de A: Toda matriz A = (aij) tiene una matriz opuesta -A = (-aij) ya que: (aij) + (-aij) = O
Por cumplir estas cuatro propiedades, se dice que el conjunto de matrices de orden mxn, es un Grupo Abeliano respecto a la suma.
Definición de RESTA: Suma con la matriz opuesta
A – B = A + (-B)
3.2 PRODUCTO DE UN NÚMERO REAL POR UNA MATRIZ Definición: Dada una matriz A=(aij) de orden mxn y un nº real p, se define el
producto p · A como otra matriz de orden mxn cuyos elementos se obtienen multiplicando cada elemento de A por p, es decir,
p · A = p (aij) = (p · aij)
Ejemplo: 3 · ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −
350211
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −
9150633
Propiedades 1. Distributiva respecto a la suma de matrices
p (A + B) = p · A + p · B
2. Distributiva con respecto a la suma de escalares

Colegio Vizcaya Matemáticas II
7
(k + p) · A = k · A + p · A
3. Asociativa mixta (k · p) · A = k (p · A)
4. 1 · A = A (1 es el elemento neutro del producto de nos reales) siendo p,k números reales cualesquiera y A,B matrices de orden mxn.
Por cumplirse estas 4 propiedades respecto al producto de una matriz por un escalar, y por ser un grupo abeliano respecto a la suma, se dice que el conjunto de matrices de orden mxn es un Espacio Vectorial. Actividades 1. Escribe, si es posible: a) La matriz unidad de orden 5 b) Una matriz diagonal de orden 3 c) La matriz nula de orden 3x2 d) Una matriz simétrica de orden 2x4
2. Hallar x e y para que: ⎟⎟⎠
⎞⎜⎜⎝
⎛0211x3
+ 2 ⎟⎟⎠
⎞⎜⎜⎝
⎛4x5312
= ⎟⎟⎠
⎞⎜⎜⎝
⎛8y11737
3.3 PRODUCTO DE MATRICES
Veamos primero algunos ejemplos:
a) ⎟⎟⎠
⎞⎜⎜⎝
⎛ −4312
· ⎟⎟⎠
⎞⎜⎜⎝
⎛7501
= ⎟⎟⎠
⎞⎜⎜⎝
⎛++−+−+
7·40·35·41·37)·1(0·2 5)·1(1·2
= ⎟⎟⎠
⎞⎜⎜⎝
⎛ −−2823
73
b) ⎟⎟⎠
⎞⎜⎜⎝
⎛ −104312
·⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
−
7826
53 = ⎟⎟
⎠
⎞⎜⎜⎝
⎛+−+++−+−−++−+−7·1)2·(05·48·16·0)3·(4
7·3)2)·(1(5·2 8·36)·1()3·(2 = ⎟⎟
⎠
⎞⎜⎜⎝
⎛− 274
3312
c) ⎟⎟⎠
⎞⎜⎜⎝
⎛ −104312
· ⎟⎟⎠
⎞⎜⎜⎝
⎛7501
= ⎟⎟⎠
⎞⎜⎜⎝
⎛ +−+ ·?35)·1(1·2 No es posible
Se observa que cada fila de la matriz resultante se obtiene multiplicando escalarmente dicha fila de la primera matriz, por cada columna de la segunda. También se observa que para que dicho producto escalar sea posible, es necesario que el número de columnas de la primera matriz sea igual que el número de filas de la segunda. Además, la matriz producto tendrá tantas filas como la primera matriz y tantas columnas como la segunda. Por tanto:

Colegio Vizcaya Matemáticas II
8
Definición: Dos matrices A de orden mxn y B de orden sxt son multiplicables, si el nº de columnas de A coincide con el nº de filas de B, es decir, n = s.
Definición: Dadas dos matrices A = (aij) de orden mxn y B = (bij) de orden nxp, se define el producto de A y B como otra matriz C = (cij) de orden mxp, donde cada elemento cij se obtiene multiplicando escalarmente la fila i de A por la columna j de B. Es decir:
⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜
⎝
⎛
mn2m1m
in2i1i
n11211
a...aa............a...aa............a...aa
·
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
npnj1n
p2j221
p1j111
b...b...b...............b...b...bb...b...b
= ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
mp1m
ij
p111
c...c...c...c...c
donde c ij = a njinj22ij11i b ·a...b ·ab · +++
Actividades
3. Dadas las matrices A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−
−
103112011
y B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
011113210
calcula:
a) A+B b) A+2B c) A·B d) A2 e) A2 - B 2 f) B·A g) A·B·A h) (A+B)·(A-B)
4. Encuentra el valor de x e y para que se verifique cada igualdad:
a) ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
−
011302
113·
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−−22y111
1x2=
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−−
−
001481
628
b) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛− tz
yx·
1123
= ⎟⎟⎠
⎞⎜⎜⎝
⎛− 11
01
5. Calcula A·B y B·A siendo A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
221031
y B = ⎟⎟⎠
⎞⎜⎜⎝
⎛ −310112
Propiedades
1. Asociativa (A · B) · C = A · (B · C)
2. Distributiva respecto a la suma
A · (B + C) = A · B + A · C
Colegio Vizcaya Matemáticas II
9
(A + B) · C = A · C + B · C
Se deduce que sólo se puede sacar factor común una matriz en una
suma, si dicha matriz multiplica en todos los sumandos por el mismo lado (derecha o izquierda) ya que:
3. NO se cumple la conmutativa De hecho, es posible que no exista A·B o B·A según la dimensión de cada
matriz. Por ello, es importante mantener el orden en el que aparezcan las matrices que se van a multiplicar.
Si A es de orden mxn A·B es de orden mxp ⇒ B·A no existe B es de orden nxp Se hace necesario entonces hablar de multiplicación por la izquierda o
por la derecha. Como consecuencia de esto, no se cumplen las igualdades notables:
(A ± B)2 ≠ A2 ± 2 AB + B2
(A + B) · (A –B) ≠ A2 – B2
porque (A+B) 2 = (A+B)·(A+B) = A 22 BA·BB·A +++ , como A·B es distinto de B·A, no se puede sustituir por 2A·B.
4. Si A · B = A · C ⇒ B = C Busca un ejemplo que lo confirme
5. Si A · B = O ⇒ A = O ó B = O
Ejemplo: ⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛0000
111-1-
· 1111
3.4 POTENCIA DE UNA MATRIZ Definición: Se define la potencia n-ésima de A, matriz cuadrada, como: An = 43421
veces n
A·...·A·A
Es evidente que si A es rectangular no se podrá multiplicar por sí misma.

Colegio Vizcaya Matemáticas II
10
Para calcular An dada la matriz A, nos serviremos del método de inducción.
Ejemplo: Dada la matriz A = ⎟⎟⎠
⎞⎜⎜⎝
⎛1071
, hallar A n .
El método de inducción requiere tres pasos:
1) Calculamos las primeras 3 ó 4 potencias: A2 , A 3 , A 4 …
A 2 = ⎟⎟⎠
⎞⎜⎜⎝
⎛1071
· ⎟⎟⎠
⎞⎜⎜⎝
⎛1071
= ⎟⎟⎠
⎞⎜⎜⎝
⎛10141
A 3 = A 2 · A = ⎟⎟⎠
⎞⎜⎜⎝
⎛10141
· ⎟⎟⎠
⎞⎜⎜⎝
⎛1071
= ⎟⎟⎠
⎞⎜⎜⎝
⎛10211
A 4 = A3 · A = ⎟⎟
⎠
⎞⎜⎜⎝
⎛10211
· ⎟⎟⎠
⎞⎜⎜⎝
⎛1071
= ⎟⎟⎠
⎞⎜⎜⎝
⎛10281
2) Suponemos, aplicando la misma regla, que An = ⎟⎟⎠
⎞⎜⎜⎝
⎛10n71
3) Demostramos que la siguiente potencia A 1n+ sigue también la misma
regla en cuyo caso, como n representa cualquier potencia, demostraríamos que si una potencia sigue ese patrón, la siguiente también, por lo que sería un patrón válido para todo valor de n.
Es decir, se debería cumplir: A 1n+ = ⎟⎟⎠
⎞⎜⎜⎝
⎛ +10
)1n(71 vamos a comprobarlo:
A 1n+ = An · A = ⎟⎟⎠
⎞⎜⎜⎝
⎛10n71
· ⎟⎟⎠
⎞⎜⎜⎝
⎛1071
= ⎟⎟⎠
⎞⎜⎜⎝
⎛ +10
n771 = ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +10
)1n(71 c.q.d.
Actividad 6. Calcula la potencia n-ésima de las matrices:
a) A = ⎟⎟⎠
⎞⎜⎜⎝
⎛1071
b) B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
102010001

Colegio Vizcaya Matemáticas II
11
4. MATRIZ INVERSA Definición: Se define matriz inversa de A cuadrada y de orden n, y se escribe A-1 , como la matriz de orden n que cumple:
A · A-1 = A-1 · A = I
No todas las matrices cuadradas tiene inversa. Descubriremos la causa en la siguiente unidad sobre determinantes.
Ejemplo:
Calculo Directo: Dada la matriz A = ⎟⎟⎠
⎞⎜⎜⎝
⎛ −1211
, hallar A-1
Llamamos A 1− = ⎟⎟⎠
⎞⎜⎜⎝
⎛tzyx
. Se debe cumplir:
⎟⎟⎠
⎞⎜⎜⎝
⎛ −1211
· ⎟⎟⎠
⎞⎜⎜⎝
⎛tzyx
= ⎟⎟⎠
⎞⎜⎜⎝
⎛1001
⇒ ⎟⎟⎠
⎞⎜⎜⎝
⎛++−−
ty2zx2tyzx
= ⎟⎟⎠
⎞⎜⎜⎝
⎛1001
⇒
⇒
⎪⎪⎩
⎪⎪⎨
⎧
=+=−=+
=−
1ty20ty0zx2
1zx
Luego la matriz inversa es: A 1− = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−3
13
23
13
1
En la siguiente unidad estudiaremos otra manera más ventajosa de calcular la matriz inversa, pues si la matriz es de orden 3 o superior, habría que manejar un número elevado de incógnitas (9, 16 …) Actividad
7. Calcula la matriz inversa de B = ⎟⎟⎠
⎞⎜⎜⎝
⎛−
−6231
3x = 1 ⇒ x = 31
, z = -32
3y = 1 ⇒ y = 31 , t =
31

Colegio Vizcaya Matemáticas II
12
5. ECUACIONES Y SISTEMAS MATRICIALES Son aquellos en los que las incógnitas son matrices. Ejemplos:
1) Hallar la matriz X tal que A·X = B dadas A y B 2) Hallar las matrices A y B tales que:
⎪⎪
⎩
⎪⎪
⎨
⎧
⎟⎟⎠
⎞⎜⎜⎝
⎛−=−
⎟⎟⎠
⎞⎜⎜⎝
⎛=+
531001
B2A2
210113
BA
Se procede de la misma forma que con ecuaciones lineales teniendo en cuenta la no conmutatividad. Ejemplo: 1) A·X = B si utilizamos la matriz inversa y la multiplicamos en ambos miembros: A 1− ·A·X = A 1− ·B ⇒ I·X = A 1− ·B ⇒ X = A 1− ·B (Es importante multiplicar A 1− en ambos miembros por la izquierda o en ambos por la derecha para que la ecuación no varíe dada la no conmutatividad) 2) X·A = B ⇒ X·A· A 1− = B· A 1− ⇒ X·I = B· A 1− ⇒ X = B· A 1− Comprueba que siempre se verifica: A · I = I · A = A (es decir, la matriz unidad actúa de elemento neutro del producto) Actividad
8. Resuelve el sistema matricial: 2X – 3Y = ⎟⎟⎠
⎞⎜⎜⎝
⎛− 41115
X + Y = ⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−
−
21
21
21
31

Colegio Vizcaya Matemáticas II
13
MATRICES: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II
1. Escribe una matriz de orden 3 que cumpla: a ij = ⎩⎨⎧
≥<
ji si 1-ji si 3
2. Resolver el sistema matricial: 5X – Y = ⎟⎟⎠
⎞⎜⎜⎝
⎛ −302211
4X – 5Y = - ⎟⎟⎠
⎞⎜⎜⎝
⎛−−
412310
3. Realiza las siguientes operaciones:
a) 4⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −
150013
- 6⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
241201
7141321
=
b) 2
1102
31
1013
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎟⎠
⎞⎜⎜⎝
⎛−
−⎟⎟⎠
⎞⎜⎜⎝
⎛−
c) -2
0521⎟⎟⎠
⎞⎜⎜⎝
⎛+3
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−⎟⎟⎠
⎞⎜⎜⎝
⎛ −
123011
010213
4. Realiza todas las multiplicaciones posibles entre las matrices:
A = ( )231 − B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−11
0 C =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
145210
213
5. Dadas las matrices A = ⎟⎟⎠
⎞⎜⎜⎝
⎛1031
y B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
503112
comprobar que (B·A) t = A ·t B t
6. Calcula el valor de m y n para que se cumpla la igualdad: A2 - m·A – n·I = O
siendo A = ⎟⎟⎠
⎞⎜⎜⎝
⎛− 1752
, I la matriz identidad de orden 2 y m,n ∈R.
(Observa que O no puede ser el número 0 pues la igualdad no podría cumplirse. Lógicamente es la matriz nula de orden 2)

Colegio Vizcaya Matemáticas II
14
7. Hallar A 2 - B 2 siendo A + B = ⎟⎟⎠
⎞⎜⎜⎝
⎛− 2112
y A – B = ⎟⎟⎠
⎞⎜⎜⎝
⎛0110
8. Hallar, en cada caso, la matriz X que verifique:
a) ⎟⎟⎠
⎞⎜⎜⎝
⎛−−−
1112
+ 3X = ⎟⎟⎠
⎞⎜⎜⎝
⎛−
−12
2121
b) X ·⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
26
021
= ⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛−
221
331
c) ⎟⎟⎠
⎞⎜⎜⎝
⎛3211
· A = ⎟⎟⎠
⎞⎜⎜⎝
⎛−−
49442411
9. Dadas las matrices A = ⎟⎟⎠
⎞⎜⎜⎝
⎛−
−412321
y B = ⎟⎟⎠
⎞⎜⎜⎝
⎛ −5051371
, hallar la matriz C
tal que B = C · A.
10. Demostrar que las matrices de la forma ⎟⎟⎠
⎞⎜⎜⎝
⎛abba
y ⎟⎟⎠
⎞⎜⎜⎝
⎛cddc
conmutan para
cualquier valor de a,b,c,d ∈ R. 11. Halla el conjunto de matrices que conmutan con:
a) A = ⎟⎟⎠
⎞⎜⎜⎝
⎛ −3211
b) B = ⎟⎟⎠
⎞⎜⎜⎝
⎛1011
c) C = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
110010001
12. Calcula la potencia n-ésima de las matrices:
a) C = ⎟⎟⎠
⎞⎜⎜⎝
⎛0110
b) D = ⎟⎟⎠
⎞⎜⎜⎝
⎛a01a
c) E = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
111111111
d) F = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
100010101
e) G = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
000100010
13. Dada la matriz A = ⎟⎟⎠
⎞⎜⎜⎝
⎛0121
, ¿es posible hallar una matriz B tal que
A · B = ⎟⎟⎠
⎞⎜⎜⎝
⎛35
? , ¿y una matriz C tal que C · A = ⎟⎟⎠
⎞⎜⎜⎝
⎛35
? Razónalo.
14. Dada la matriz A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−431541
430

Colegio Vizcaya Matemáticas II
15
a) Demuestra que verifica la igualdad A3 + I = O, siendo I la matriz unidad y O la matriz nula.
b) Calcula razonadamente A10 .
15. Dada la matriz A = ⎟⎟⎠
⎞⎜⎜⎝
⎛2513
, halla la matriz B tal que B = 3A t ·A – 2I
y resuelve la ecuación A·X = ⎟⎟⎠
⎞⎜⎜⎝
⎛1002
.
16. Hallar el valor de k para que la matriz (A-kI) 2 sea la matriz nula,
siendo A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−−−−
311201210
PROBLEMAS DE SELECTIVIDAD
17. (JUNIO 2008) Sean A y M las matrices A = ⎟⎟⎠
⎞⎜⎜⎝
⎛3123
M = ⎟⎟⎠
⎞⎜⎜⎝
⎛qpnm
.
Encontrar las condiciones que deben cumplir m, n, p y q para que se verifique que el producto de ambas matrices efectuado en las dos formas posibles, sea el mismo.
18. (JULIO 2007) Sean A, I y B las matrices dadas por
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
001011110
I = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
100010001
y B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−−
514123436
Contestar razonadamente la siguiente pregunta: ¿existe algún valor de λ ∈R tal que la igualdad (A - λ I) 2 = B sea cierta? En caso afirmativo, encontrar dicho valor de λ .
19. (JUNIO 2003) Sea A la matriz A = ⎟⎟⎠
⎞⎜⎜⎝
⎛1301
y sea n un nº natural cualquiera.
Encontrar el valor de An para cada n y hallar A350 - A 250 . 20. (JULIO 2004) Encontrar todas las matrices cuadradas de orden 2 que
conmutan respecto al producto con la matriz A dada por A = ⎟⎟⎠
⎞⎜⎜⎝
⎛1021
.

Colegio Vizcaya Matemáticas II
16
21. (JULIO 2002) Dos alumnos de 2º curso discuten sobre el valor de la potencia
n-ésima de la matriz A dada por A = ⎟⎟⎠
⎞⎜⎜⎝
⎛1031
. Uno afirma que para cada n
natural se verifica que An = ⎟⎟⎠
⎞⎜⎜⎝
⎛ −n
n
20)12(31
y el otro dice que la verdadera
fórmula de An es An = ⎟⎟⎠
⎞⎜⎜⎝
⎛n
n
2031
. ¿Alguno de ellos está en lo cierto? Razonar la
contestación. 22. (JUNIO 2002) Encontrar las matrices A y B sabiendo que verifican las
siguientes ecuaciones matriciales:
2A+3B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−1338
61118748
-A+5B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
−
135910117
1629
23. (SEPTIEMBRE 98/99) Sean A y B las matrices dadas por:
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
100052025
B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
1000cc0ba
encontrar las condiciones que deben cumplir los coeficientes a, b y c para que se verifique A·B = B·A
24. (JUNIO 98/99) Calcular la matriz A sabiendo que se verifica la igualdad:
A · ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
300320321
= ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
200020002
y explicar el método seguido.
25. (SEPTIEMBRE 98) Sea la matriz A =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
31
00
030001
. Calcular la forma general de
la matriz A n donde n es un número natural cualquiera.

Colegio Vizcaya Matemáticas II
17
CUESTIONES 26. Siendo A y B dos matrices de orden 3 tales que: A= (a ij ) = (i-j) y B= (b ij )= [ ]1jji 2)1( ++ +−
calcula las matrices A+B, 2A-3B y A·B. 27. Si A es una matriz de orden 3 prueba que A+A t es una matriz simétrica. ¿Se puede generalizar a orden n? 28. Sean A,B y C tres matrices cuadradas de orden n. ¿Son ciertas las igualdades siguientes? Razónalo. a) (A+B)2 = A 2 +2AB+B 2 b) AB+CA = (B+C)A c) AB+ABC = AB(I+C) d) AB+CA = A(B+C) 29. Si A es una matriz tal que A2 = A (idempotente) y B = 2A-I, demuestra que B 2 = I. 30. Si A·B = A·C, ¿se puede asegurar que B=C? Si A·B = O, ¿se puede asegurar que A=O ó B=O?
Razónalo en caso afirmativo y, en caso negativo, escribe un contraejemplo.
31. Demuestra que si A·B =A y B·A = B siendo A y B matrices cuadradas de
orden n, entonces A2 =A. 32. Justifica por qué no es cierta la igualdad (A+B)·(A-B) = A2 - B 2 33. Indica por qué no pueden efectuarse las siguientes operaciones:
a) ( ) ( )25871231
1+⋅
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
b) 2
560041
⎟⎟⎠
⎞⎜⎜⎝
⎛−
−+ ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −402311

Colegio Vizcaya Matemáticas II
18
c) 1
0021
−
⎟⎟⎠
⎞⎜⎜⎝
⎛· ⎟⎟
⎠
⎞⎜⎜⎝
⎛1153
34. Si la matriz A tiene orden nxm y la matriz B, mxn, indica si pueden realizarse
las siguientes operaciones y, en caso afirmativo, di el orden de la matriz resultante:
a) A·B b) B·A c) 3·A d) A·B+In e) A+B f) A2 35. Razona si es verdadero o falso: a) Toda matriz diagonal es simétrica b) La matriz nula de orden 2x4 es simétrica c) La matriz unidad es triangular superior d) Toda matriz triangular superior e inferior es diagonal e) Toda matriz nula es diagonal 36. Si A y B son matrices cuadradas de orden n, razona cuáles de las siguientes propiedades son ciertas:
a) A·B = B·A b) (A+B)+C = A+(B+C) c) (A·B) t = A t ·B t d) A 3 = A ·2 A = A·A 2 e) (A+B) t = A t +B t f) p·(q·A) = (p·q)·A g) (A+B) 2 = A 2 +2AB+B 2 h) B·A+C·B = B·(A+C)
37. Dada una matriz A:
a) ¿Existe una matriz B tal que A·B sea una matriz fila? En caso afirmativo, ¿qué orden tendrá B si A es una matriz mxn? b) ¿Existe una matriz B tal que B·A sea una matriz fila? En caso afirmativo, ¿qué orden tendrá B si A es una matriz mxn?
Pon un ejemplo en cada caso siendo A = ⎟⎟⎠
⎞⎜⎜⎝
⎛− 031
211
38. Definimos la traza de una matriz cuadrada A de orden 2 como: tr(A) = a11 +a 22 .
Prueba que si A y B son dos matrices cuadradas de orden 2, entonces se cumple:
tr(A·B) = tr(B·A)
Colegio Vizcaya Matemáticas II
19
UNIDAD 2
DETERMINANTES
2º BACHILLER
Colegio Vizcaya Matemáticas II
20
OBJETIVOS DIDÁCTICOS 1. Conocer el concepto de determinante de una matriz cuadrada. 2. Conocer y aplicar las propiedades de los determinantes. 3. Calcular el valor de un determinante de cualquier orden empleando la regla de
Sarrus y el desarrollo por los elementos de una línea. 4. Utilizar los determinantes para asegurar la existencia de la inversa de una matriz y para calcular dicha inversa. 5. Hallar el rango de una matriz por medio de sus menores. CONCEPTOS
1. Determinantes de orden 2 y 3: concepto y cálculo.
2. Propiedades de los determinantes. 3. Menores complementarios y matriz adjunta. 4. Cálculo del valor de un determinantede cualquier orden por el desarrollo de una
línea. 5. Determinación de la matriz inversa. 6. Rango de una matriz.
Colegio Vizcaya Matemáticas II
21
1. INTRODUCCIÓN
Para llegar a la definición de determinante de una matriz son necesarios algunos conocimientos previos.
Definición 1 Se llaman permutaciones de n elementos (nos naturales) a las distintas maneras en que pueden ordenarse. De entre ellas, se llama permutación principal a la que respeta el orden natural creciente de sus elementos. Ejemplo: 3,1,2,4 1,4,3,2 2,1,4,3 … son permutaciones de 4 elementos. 1,2,3,4 es la permutación principal. Con 2 elementos hay 2 permutaciones: 1,2 y 2,1. Con 3 elementos hay 6 permutaciones: 1,2,3 1,3,2 2,1,3 2,3,1 3,1,2 3,2,1 Con 4 elementos hay _______ permutaciones. Escríbelas. Determina, en general, el número de permutaciones para n elementos.
Definición 2 Se dice que 2 elementos de una permutación cualquiera de n elementos presentan una inversión, si están en orden contrario al de la permutación principal, y se dice que presentan permanencia si están en el mismo orden. Ejemplo: 2 1 4 5 3 Permanencia inversión Para contar todas las inversiones de una permutación, se compara cada elemento con todos los que le siguen. Ejemplo: 2 4 1 3 Inv. Inv. Inv. Esta permutación tiene 3 inversiones en total.

Colegio Vizcaya Matemáticas II
22
Definición 3 Se dice que una permutación es de clase par si tiene un nº par de inversiones y de clase impar si tiene un nº impar de inversiones. Indica la clase de las siguientes permutaciones: 2 5 3 1 4 2 4 3 1 5
De las n! permutaciones de 1, 2, …, n, la mitad (2n!
) son de clase par y la
otra mitad son de clase impar. Ejemplo: Veámoslo con las permutaciones de tres elementos:
1 2 3 — 0 inversiones — PAR1 3 2 — 1 inversiones — IMPAR2 1 3 — 1 inversiones — IMPAR2 3 1 — 2 inversiones — PAR3 1 2 — 2 inversiones — PAR3 2 1 — 3 inversiones — IMPAR
Definición 4 Se llama signatura de una permutación al nº ( )ν1− donde ν representa al nº de inversiones de la permutación. Por tanto, las permutaciones pares tendrán signatura 1 y las impares -1.
PROPOSICIÓN
Si en una permutación intercambiamos entre sí 2 elementos cualesquiera, ésta cambia de clase. Ejemplo: 2, 5, 3, 1, 4 5 inversiones: Clase IMPAR Intercambiamos el 4 con el 5: 2, 4, 3, 1, 5 4 inversiones: Clase PAR
Demostración
1) Si intercambiamos dos nos consecutivos, lo único que se altera es el orden establecido entre ellos porque su situación respecto a los restantes no varía. Por tanto, aumenta o disminuye 1 unidad el nº de inversiones y cambia la clase. 2) Si no son consecutivos, hay h espacios intermedios entre ambos nos. Para pasar el 1º hasta el lugar del 2º hay que realizar h cambios con su inmediato a la derecha, y para pasar del 2º al lugar del 1º, h-1 cambios con el consecutivo a su izquierda. Son en total 2h-1 cambios consecutivos y en cada uno de ellos cambia la clase. Por ser un nº impar de cambios, el resultado final (par o impar) es contrario al inicial.
Colegio Vizcaya Matemáticas II
23
Utilizaremos el ejemplo anterior para comprender la idea. Partimos de la permutación 2. 5, 3, 1, 4 de clase impar e intercambiamos el 5 con el 4 a través de sucesivos cambios consecutivos. Para llevar el 5 al lugar del 4 hay que hacer 3 cambios con su inmediato a la derecha y para retroceder el 4 hasta el lugar del 5 se necesitan 2 cambios consecutivos con el inmediato a la izquierda.
cambios 5
osconsecutiv cambios 2 5 1 3 4 25 1 4 3 2
osconsecutiv cambios 3 5 4 1 3 24 5 1 3 24 1 5 3 2
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎭⎬⎫
⎪⎭
⎪⎬
⎫
Como en cada intercambio cambia la clase e inicialmente era impar, quedará finalmente par (IMPAR-par-impar-par-impar-PAR)
2. DETERMINANTE DE UNA MATRIZ
El determinante de una matriz es, en definitiva, un número real. El cálculo de dicho número en cada matriz, se realiza de la siguiente forma:
1) se hacen todos los productos posibles de elementos de distinta fila y columna
2) se suman (restan) todos los productos adjudicándoles un signo + o – según un criterio que se explica a continuación.
Según este procedimiento, sólo las matrices cuadradas tendrán determinante.
DETERMINANTES DE ORDEN 2 Para expresar el determinante de una matriz ésta se escribe entre barras.
a · a a · a aaa
211222112221
1211a −=
a 11 · a 22 y a12 · a 21 son los dos únicos productos de elementos de fila y columna distinta. El primer subíndice es 1,2 en ambos, lo que garantiza que hay uno de cada fila y no se repite ninguna. Igualmente, los segundos subíndices son 1,2 y 2,1 (permutaciones de 1,2) que indican que hay uno de cada columna sin repetición y que se han contemplado todas las posibilidades. Los sumandos cuya permutación sea par llevarán signo + y aquellos de permutación impar, signo -. Ejemplo:
( ) 11 5 · 1- 3 · 2 351-2
=−=
Colegio Vizcaya Matemáticas II
24
DETERMINANTES DE ORDEN 3
aaaaaaaaa
333231
232221
131211
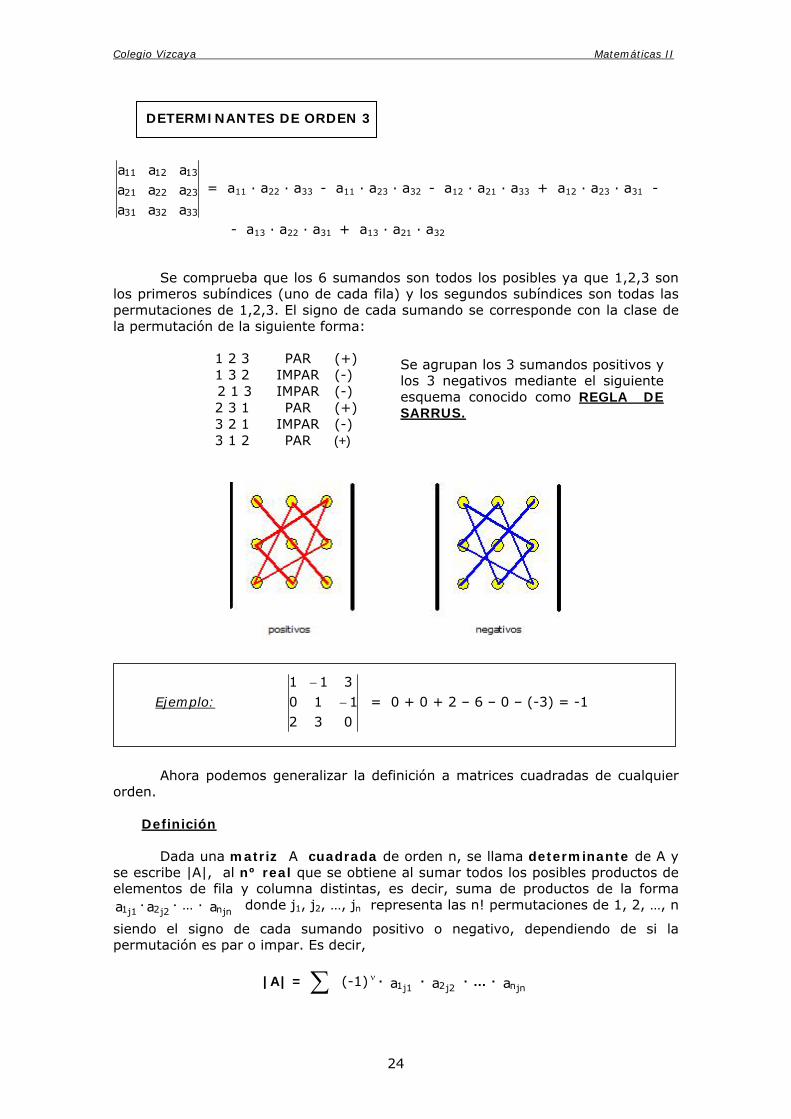
= a11 · a22 · a33 - a11 · a23 · a32 - a12 · a21 · a33 + a12 · a23 · a31 -
- a13 · a22 · a31 + a13 · a21 · a32 Se comprueba que los 6 sumandos son todos los posibles ya que 1,2,3 son los primeros subíndices (uno de cada fila) y los segundos subíndices son todas las permutaciones de 1,2,3. El signo de cada sumando se corresponde con la clase de la permutación de la siguiente forma:
1 2 3 PAR (+)1 3 2 IMPAR (-) 2 1 3 IMPAR (-)2 3 1 PAR (+)3 2 1 IMPAR (-)3 1 2 PAR (+)
Ejemplo: 032110
311−
− = 0 + 0 + 2 – 6 – 0 – (-3) = -1
Ahora podemos generalizar la definición a matrices cuadradas de cualquier orden.
Definición
Dada una matriz A cuadrada de orden n, se llama determinante de A y se escribe |A|, al nº real que se obtiene al sumar todos los posibles productos de elementos de fila y columna distintas, es decir, suma de productos de la forma a j11 · a j22 · … · a jnn donde j1, j2, …, jn representa las n! permutaciones de 1, 2, …, n
siendo el signo de cada sumando positivo o negativo, dependiendo de si la permutación es par o impar. Es decir,
|A| = ∑ (-1) ν · a j11 · a j22 · … · a jnn
Se agrupan los 3 sumandos positivos ylos 3 negativos mediante el siguienteesquema conocido como REGLA DESARRUS.

Colegio Vizcaya Matemáticas II
25
- Hay n! sumandos con n factores cada uno.
- 2n!
sumandos son positivos y 2n!
son negativos.
-Cada sumando puede tener los factores ordenados por columnas permutando las filas.
|A| = ∑ (-1) ν · a 11j · a 22j · … · a nnj
Actividades 1. Calcula los siguientes determinantes:
a) 3115 −
b) 1baab
+ c)
132050211
−−
− d)
110231
035
−−− e)
021x30y1x
−−
2. Resuelve las ecuaciones:
a) x23xx5
−+
= 15 b) x341xx2011
−
−= -47 c)
a100aaaa1
2
2
=8
Definición
Una matriz cuadrada A se dice regular si su determinante es distinto de 0. En caso contrario se llama singular. Parece evidente que calcular determinantes de orden 4 o superior, sería excesivamente laborioso si seguimos la definición, pues habría que calcular 24 productos de 4 elementos cada uno, 120 de 5 etc. Se hace necesario entonces encontrar un método equivalente para determinantes de orden superior a 3 y, para ello, haremos previamente un estudio de sus propiedades.
3. PROPIEDADES DE LOS DETERMINANTES
1) El determinante de una matriz cuadrada coincide con el de su traspuesta.
|A| = |At| Ejemplo:
|A|=521-431-
001− =1·3·5 + (-1)·2·0 + 0·(-4)·(-1) – 0·3·(-1) – 0·(-1)·5 – 1·(-4)·2= 23
|A t |=54-02301-11 −
=1·3·5 + 0·(-4)·(-1)+ (-1)·2·0 – (-1)·3·0 – (-1)·0·5 – 2·(-4)·1=23
De hecho, coinciden uno a uno todos los sumandos.
Colegio Vizcaya Matemáticas II
26
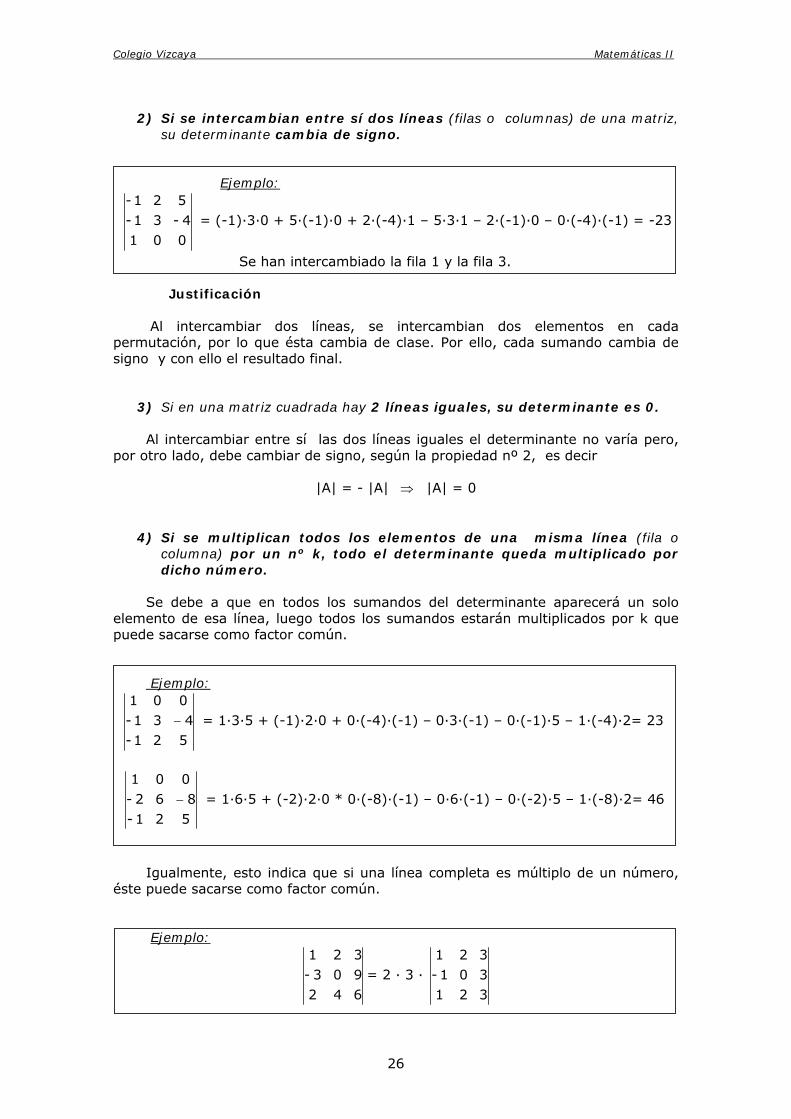
2) Si se intercambian entre sí dos líneas (filas o columnas) de una matriz,
su determinante cambia de signo.
Ejemplo:
0014-31-
521- = (-1)·3·0 + 5·(-1)·0 + 2·(-4)·1 – 5·3·1 – 2·(-1)·0 – 0·(-4)·(-1) = -23
Se han intercambiado la fila 1 y la fila 3. Justificación Al intercambiar dos líneas, se intercambian dos elementos en cada
permutación, por lo que ésta cambia de clase. Por ello, cada sumando cambia de signo y con ello el resultado final.
3) Si en una matriz cuadrada hay 2 líneas iguales, su determinante es 0. Al intercambiar entre sí las dos líneas iguales el determinante no varía pero, por otro lado, debe cambiar de signo, según la propiedad nº 2, es decir
|A| = - |A| ⇒ |A| = 0
4) Si se multiplican todos los elementos de una misma línea (fila o
columna) por un nº k, todo el determinante queda multiplicado por dicho número.
Se debe a que en todos los sumandos del determinante aparecerá un solo elemento de esa línea, luego todos los sumandos estarán multiplicados por k que puede sacarse como factor común. Ejemplo:
521-431-
001− = 1·3·5 + (-1)·2·0 + 0·(-4)·(-1) – 0·3·(-1) – 0·(-1)·5 – 1·(-4)·2= 23
521-862-
001− = 1·6·5 + (-2)·2·0 * 0·(-8)·(-1) – 0·6·(-1) – 0·(-2)·5 – 1·(-8)·2= 46
Igualmente, esto indica que si una línea completa es múltiplo de un número, éste puede sacarse como factor común. Ejemplo:
642903-321
= 2 · 3 · 321301-321

Colegio Vizcaya Matemáticas II
27
5) Si todos los elementos de una línea de una matriz son ceros, su determinante será cero.
Lógicamente, en todos los sumandos del determinante aparecerá un elemento de esa línea, por lo que todos los sumandos serán nulos y, por tanto, el determinante será 0.
6) Si en una matriz cuadrada hay dos líneas proporcionales, su determinante es 0.
Puede salir como factor común la constante de proporcionalidad, quedando 2 líneas iguales. Ejemplo:
642401-321
= 2 · 321401-321
= 2 · 0 = 0
7) Si todos los elementos de una línea de una matriz se descomponen en una suma de dos sumandos, su determinante se descompone en la suma de dos determinantes de la siguiente forma:
fedcba
++
= fdca
+ fecb
8) El determinante de una matriz no varía si cambiamos una línea por la suma de ella más una combinación lineal de otras.
Ejemplo:
521-4-31-001
= 23 3-84-4-31-001
= -9 + 32 = 23
Esto es debido a que en base a las propiedades anteriores:
3-84-4-31-001
= 2·(-4)0-52·30-22(-1)1-1-4-31-
001
+++ =
= 521-4-31-001
+ 001-4-31-001
+ 2(-4)2·32(-1)
4-31-001
= 23 + 0 + 0 = 23
f 3 - f 1 + 2·f 2
Colegio Vizcaya Matemáticas II
28
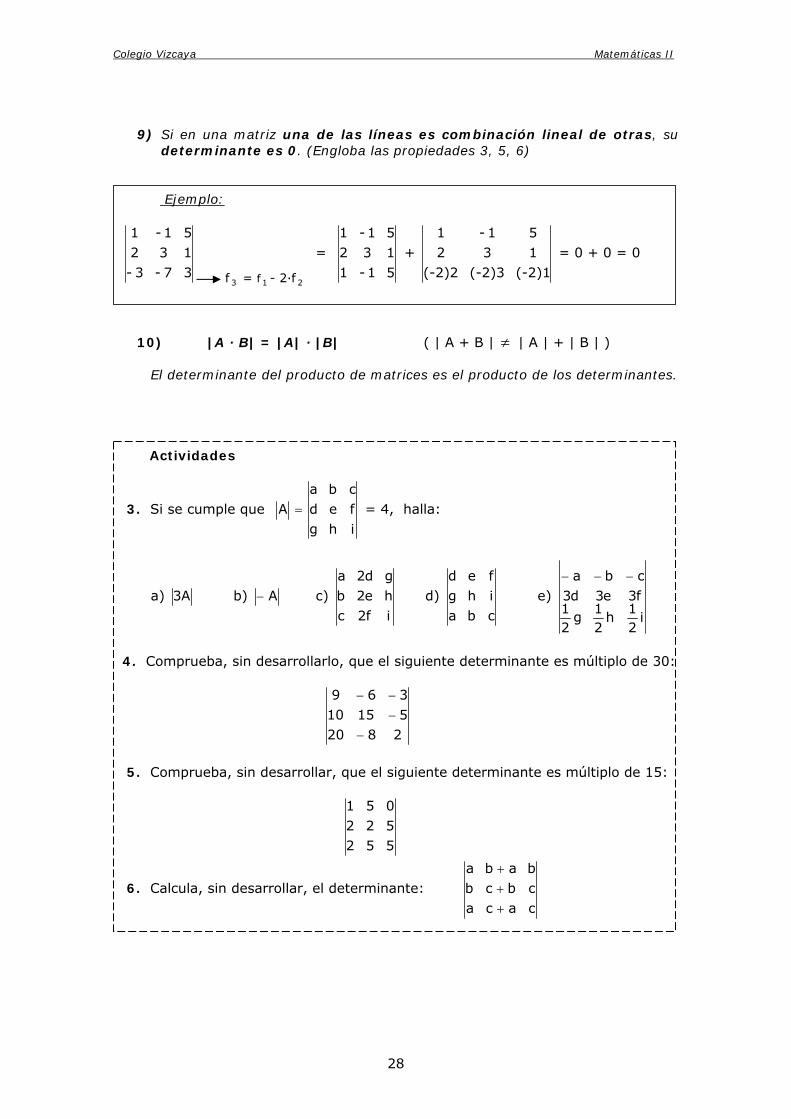
9) Si en una matriz una de las líneas es combinación lineal de otras, su determinante es 0. (Engloba las propiedades 3, 5, 6)
Ejemplo:
37-3-13251-1
= 51-113251-1
+ (-2)1(-2)3(-2)2
13251-1
= 0 + 0 = 0
10) |A · B| = |A| · |B| ( | A + B | ≠ | A | + | B | )
El determinante del producto de matrices es el producto de los determinantes. Actividades
3. Si se cumple que ihgfedcba
A = = 4, halla:
a) A3 b) A− c) if2che2bgd2a
d) cbaihgfed
e)
i21
h21
g21
f3e3d3cba −−−
4. Comprueba, sin desarrollarlo, que el siguiente determinante es múltiplo de 30:
282051510369
−−−−
5. Comprueba, sin desarrollar, que el siguiente determinante es múltiplo de 15:
552522051
6. Calcula, sin desarrollar, el determinante: cacacbcbbaba
+++
f 3 = f 1 - 2·f 2

Colegio Vizcaya Matemáticas II
29
4. DESARROLLO DE UN DETERMINANTE POR LOS
ELEMENTOS DE UNA LÍNEA Definición 1
Dada una matriz cuadrada de orden n, A = (aij), se llama menor complementario del elemento aij y se escribe ijα , al determinante de la matriz que
resulta al suprimir en A la fila i y la columna j. Ejemplo:
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
225041213
Cada elemento tendría su menor complementario.
Definición 2 Se llama adjunto del elemento aij y se escribe Aij, al producto: Aij = (-1)i+j · ijα
Ejemplo: A12 = (-1)3 · 12α = - (-2) = 2 En la matriz del ejemplo anterior: A23 = (-1)5 · 23α = - (-11) = 11
A22 = (-1)4 · 22α = 2523
= -4
Se observa que a cada elemento de la matriz le corresponde su adjunto y que éste, es igual al menor complementario si la suma de subíndices es par y es opuesto si dicha suma es impar.
PROPOSICIÓN
Si A es una matriz cuadrada de orden n, su determinante es igual a la suma de los productos de los elementos de UNA línea (fila o columna) por sus adjuntos correspondientes. Ejemplo: Si desarrollamos por la fila 2:
= (-1) · A21 + 3 · A22 + (-4) · A23 =
= (-1) · ⎥⎥⎦
⎤
⎢⎢⎣
⎡−
5200
+ 3 ·51-01
+ (-4) · ⎥⎥⎦
⎤
⎢⎢⎣
⎡−
21-01
= 0 + 15 + 8 = 23
12α = 2501-
= -2
23α = 2-513
= -11
521-4-31-
001
Colegio Vizcaya Matemáticas II
30
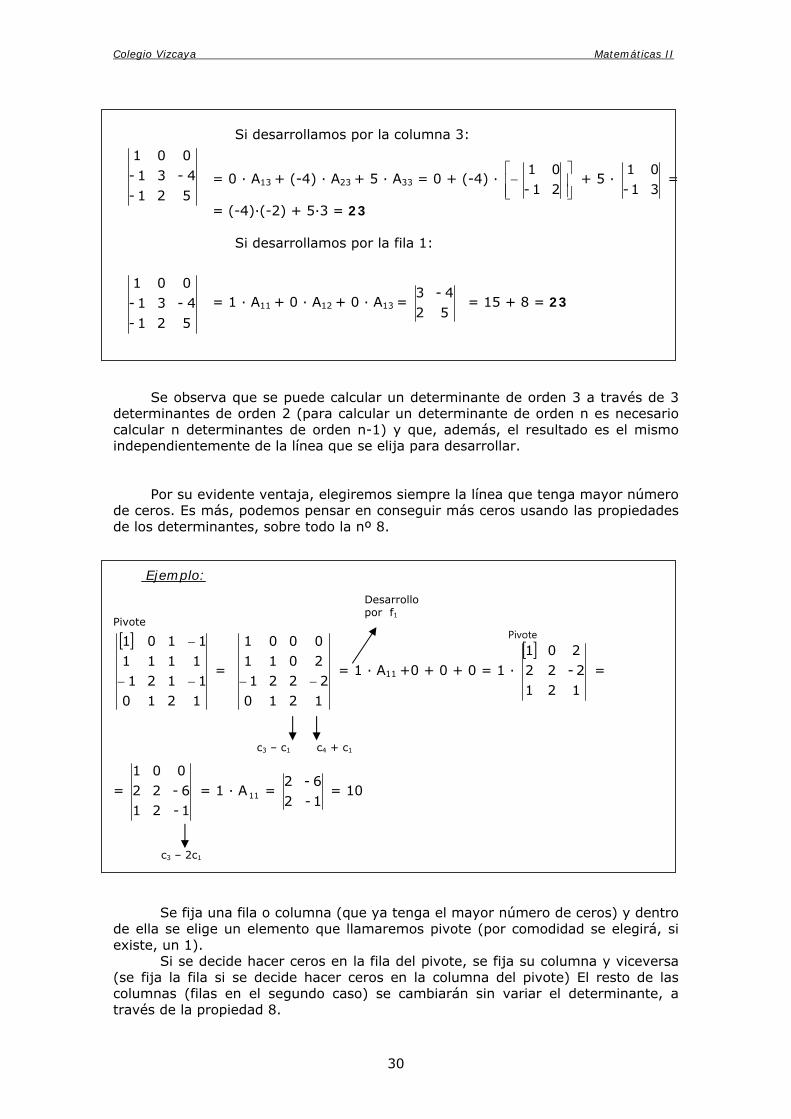
Si desarrollamos por la columna 3:
= 0 · A13 + (-4) · A23 + 5 · A33 = 0 + (-4) · ⎥⎥⎦
⎤
⎢⎢⎣
⎡−
21-01
+ 5 · 31-01
=
= (-4)·(-2) + 5·3 = 23 Si desarrollamos por la fila 1:
= 1 · A11 + 0 · A12 + 0 · A13 = 524-3
= 15 + 8 = 23
Se observa que se puede calcular un determinante de orden 3 a través de 3 determinantes de orden 2 (para calcular un determinante de orden n es necesario calcular n determinantes de orden n-1) y que, además, el resultado es el mismo independientemente de la línea que se elija para desarrollar. Por su evidente ventaja, elegiremos siempre la línea que tenga mayor número de ceros. Es más, podemos pensar en conseguir más ceros usando las propiedades de los determinantes, sobre todo la nº 8. Ejemplo: [ ]
12101121
11111101
−−
−
=
12102221
20110001
−− = 1 · A11 +0 + 0 + 0 = 1 ·
[ ]
1212-22201
=
= 1-216-22001
= 1 · A11 = 1-26-2
= 10
Se fija una fila o columna (que ya tenga el mayor número de ceros) y dentro de ella se elige un elemento que llamaremos pivote (por comodidad se elegirá, si existe, un 1). Si se decide hacer ceros en la fila del pivote, se fija su columna y viceversa (se fija la fila si se decide hacer ceros en la columna del pivote) El resto de las columnas (filas en el segundo caso) se cambiarán sin variar el determinante, a través de la propiedad 8.
c3 – c1 c4 + c1
Desarrollo por f1
Pivote Pivote
c3 – 2c1
521-4-31-
001
521-4-31-
001
Colegio Vizcaya Matemáticas II
31
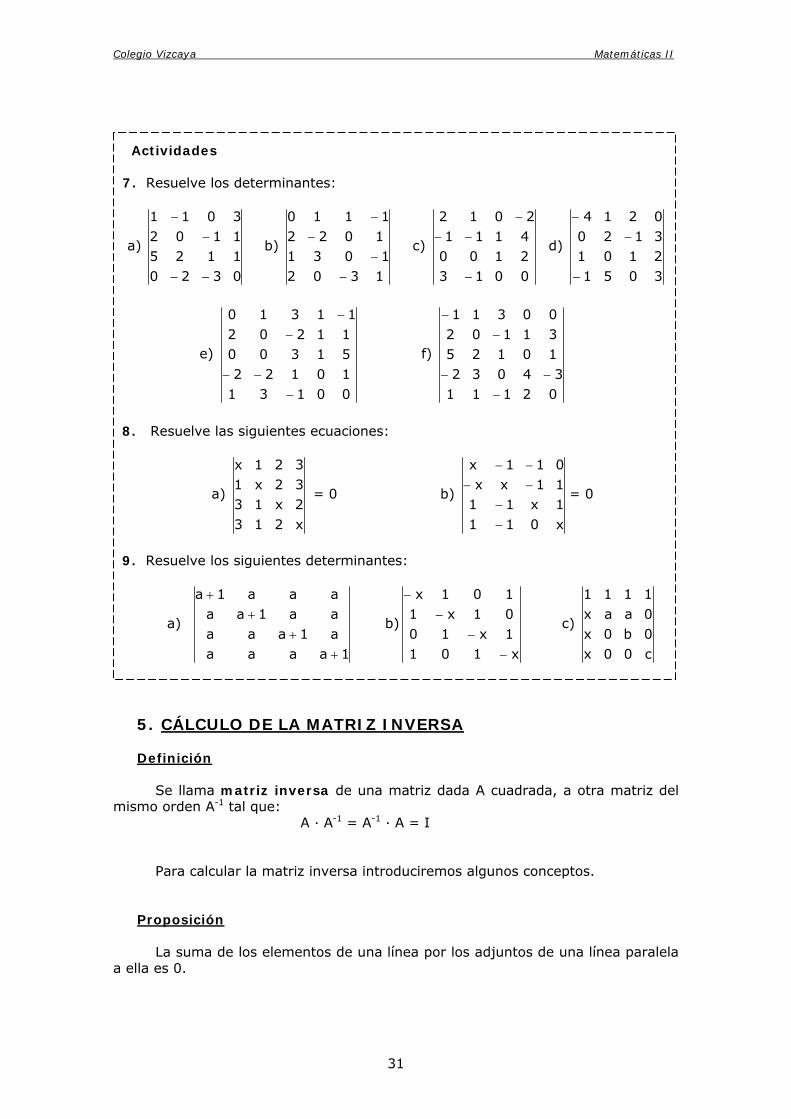
Actividades 7. Resuelve los determinantes:
a)
0320112511023011
−−
−−
b)
13021031
10221110
−−
−−
c)
0013210041112012
−
−−−
d)
3051210131200214
−
−−
e)
0013110122513001120211310
−−−
−−
f)
0211134032
101253110200311
−−−
−−
8. Resuelve las siguientes ecuaciones:
a)
x2132x1332x1321x
= 0 b)
x0111x1111xx011x
−−
−−−−
= 0
9. Resuelve los siguientes determinantes:
a)
1aaaaa1aaaaa1aaaaa1a
++
++
b)
x1011x1001x1101x
−−
−−
c)
c00x0b0x0aax1111
5. CÁLCULO DE LA MATRIZ INVERSA Definición
Se llama matriz inversa de una matriz dada A cuadrada, a otra matriz del mismo orden A-1 tal que: A · A-1 = A-1 · A = I
Para calcular la matriz inversa introduciremos algunos conceptos.
Proposición
La suma de los elementos de una línea por los adjuntos de una línea paralela a ella es 0.

Colegio Vizcaya Matemáticas II
32
Ejemplo: Dado el determinante 2-5410231-1
Multiplicamos los elementos de la fila 1 por los adjuntos de la fila 3:
a11 · A31 + a12 · A32 + a13 · A33 = 1 · 1031−
+ (-1) · ⎥⎥⎦
⎤
⎢⎢⎣
⎡−
1231
+ 3 · 021-1
=
= -1 – 5 + 6 = 0
ya que en realidad, a11 · A31 + a12 · A32 + a13 · A33 = 31-110231-1
= 0
En realidad es el desarrollo de un determinante con dos líneas iguales
Definición
Se llama matriz adjunta de la matriz A y se escribe Adj(A) a la matriz que resulta de sustituir en A cada elemento por su adjunto Aij.
Adj(A) = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
AAAAAAAAA
333231
232221
131211
Ejemplo:
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
2-5410231-1
Adj(A) = = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
251-9-14-13
1085-
PROPOSICIÓN Toda matriz conmuta con la traspuesta de su adjunta y además el resultado de ese producto es |A| · I, es decir:
A · ( )t Adj.(A) = ( )t Adj.(A) · A = |A| · I

Colegio Vizcaya Matemáticas II
33
Demostración
A · ( )t Adj.(A) = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
aaaaaaaaa
333231
232221
131211
· ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
AAAAAAAAA
332313
322212
312111
=
= ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
++++++++++++++++++
Aa Aa Aa Aa Aa Aa Aa Aa Aa
Aa Aa Aa Aa Aa Aa Aa Aa Aa
Aa Aa Aa Aa Aa Aa Aa Aa Aa
33 3332 3231 3133 2332 2231 2133 1332 1231 11
23 3322 3221 3123 2322 2221 2123 1322 1221 11
13 3312 3211 3113 2312 2211 2113 1312 1211 11
=
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
|A|000|A|000|A|
= |A| · ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
100010001
= |A| · I
ya que en la diagonal se encuentran los productos de los elementos de una línea por sus propios adjuntos (lo que da lugar al determinante de la matriz), y el resto son productos de los elementos de una línea por los adjuntos de una paralela ( que equivalen a 0 por la proposición anterior)
Definición Se llama Matriz Inversa de una matriz dada, A cuadrada, a otra matriz del mismo orden A-1 tal que:
A · A-1 = A-1 · A = I
PROPOSICIÓN Si A es una matriz cuadrada cuyo determinante es distinto de 0 (regular), existe su inversa A-1 y coincide con:
A-1 = [ ]
|A|
Adj.(A)t
Demostración
La afirmación se deduce de la proposición anterior, teniendo en cuenta que |A|, por ser un nº real, puede pasar dividiendo al otro miembro de la igualdad. (Por supuesto sólo si es distinto de 0)
A · [ ]Adj.(A)t = [ ]Adj.(A)
t · A = |A| · I
A · [ ]
|A|)A(Adj t
= [ ]
|A|)A(Adj t
· A = I
Se observa entonces que la matriz que verifica las condiciones de la inversa
(conmuta con A y el producto es la identidad), es: [ ]
|A|)A(Adj t
.
Las matrices singulares (cuyo determinante es 0) no tienen inversa.

Colegio Vizcaya Matemáticas II
34
Ejemplo:
Hallar la matriz inversa de A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
100420441
|A| = 2 ≠ 0
1) Adj(A) = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
+++
++
24-80-14-00-2
= ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
24-8014-002
2) [ ]Adj.(A)t =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
2004-1084-2
3) A-1 = [ ]
|A|
Adj.(A)t
= 21
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
2004-1084-2
= ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
1002-2
1042-1
4) Comprobar que A · A-1 = I
Actividades 10. Halla, si es posible, la matriz inversa en cada caso:
a) ⎟⎟⎠
⎞⎜⎜⎝
⎛−1321
b) ⎟⎟⎠
⎞⎜⎜⎝
⎛−
−26
13 c)
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−
−
142030121
11. Dada la matriz A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛ −
20011a1a1
a) ¿Para qué valores de a tendrá inversa (será inversible) la matriz? b) Halla dicha matriz inversa para a=2.
PROPOSICIÓN La matriz inversa de A, si existe, es única.
Demostración Por reducción al absurdo, supongamos que A posee 2 matrices inversas B y C, es decir:
⎭⎬⎫
====
I A · C C · AI A · B B · A
entonces:

Colegio Vizcaya Matemáticas II
35
C = C · I = C (A · B) = (C · A) · B = I · B = B asociativa Se deduce entonces, que no puede haber dos inversas distintas, pues suponiendo que las hubiera, serían la misma.
6. RANGO DE UNA MATRIZ
Definición Se llama menor de orden p de una matriz A, a cualquier determinante de orden p que se obtiene al suprimir en A alguna fila y/o columna. Ejemplo:
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
122003142511
menores de orden 1: |4|, |-1|, |0|… hay 12 en total
menores de orden 2: 2-051
, 1201−
, 2014 −
…
menores de orden 3: 12001-421-1
, 120034251
−… hay 4 en total
Esta matriz no puede tener menores de orden 4 o superior por contener sólo 3 filas. Es evidente que si A es de orden mxn y p es el orden de cualquiera de sus menores, entonces p ≤ n y p ≤ m, o lo que es lo mismo: p ≤ min{ }n,m Si la matriz es cuadrada se entiende que el menor de mayor orden posible es ella misma.
Definición Se llama rango de una matriz al orden del mayor de los menores distinto de cero de dicha matriz. Se escribe rg(A). Ejemplo: En la matriz anterior por existir un menor de orden 3 distinto de 0, diremos que rg(A) = 3
12001-421-1
= -1 + 16 + 4 = 19 ≠ 0
pues 3 es el orden del menor más grande posible distinto de 0.
Colegio Vizcaya Matemáticas II
36
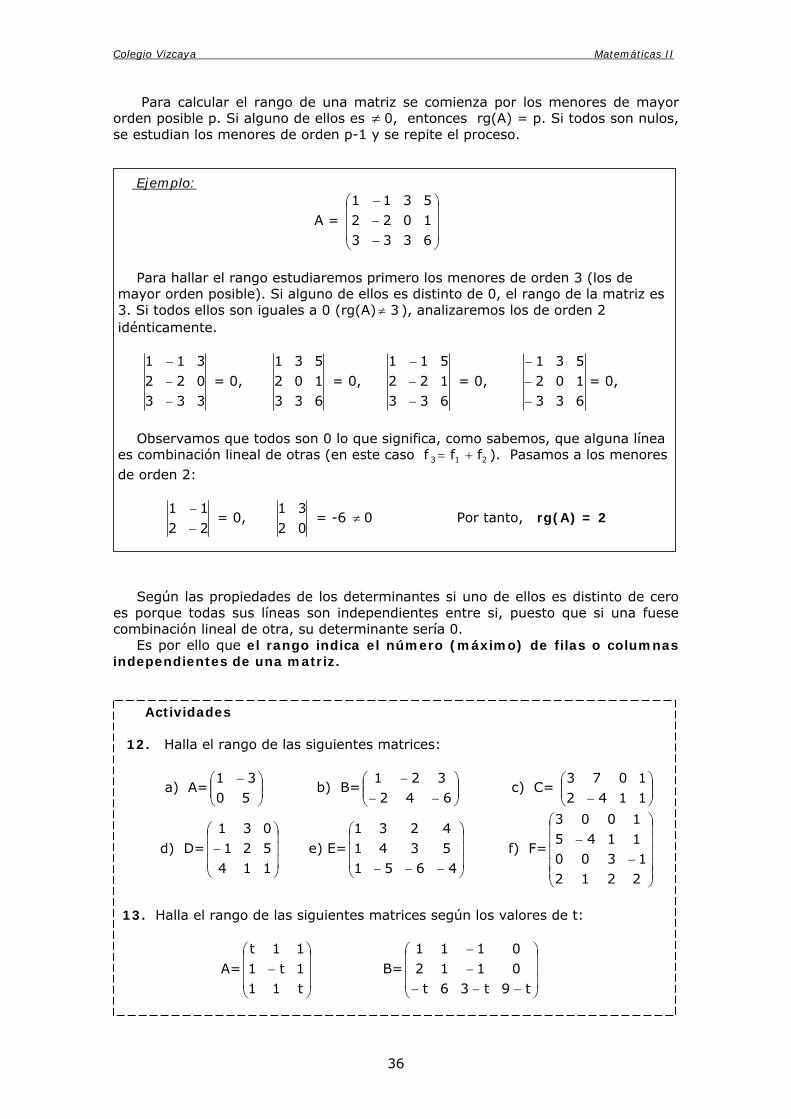
Para calcular el rango de una matriz se comienza por los menores de mayor orden posible p. Si alguno de ellos es ≠ 0, entonces rg(A) = p. Si todos son nulos, se estudian los menores de orden p-1 y se repite el proceso. Ejemplo:
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
633310225311
Para hallar el rango estudiaremos primero los menores de orden 3 (los de mayor orden posible). Si alguno de ellos es distinto de 0, el rango de la matriz es 3. Si todos ellos son iguales a 0 (rg(A) 3≠ ), analizaremos los de orden 2 idénticamente.
333022311
−−−
= 0, 633102531
= 0, 633122511
−−−
= 0, 633102531
−−−
= 0,
Observamos que todos son 0 lo que significa, como sabemos, que alguna línea es combinación lineal de otras (en este caso f 213 ff += ). Pasamos a los menores de orden 2:
2211
−−
= 0, 0231
= -6 ≠ 0 Por tanto, rg(A) = 2
Según las propiedades de los determinantes si uno de ellos es distinto de cero es porque todas sus líneas son independientes entre si, puesto que si una fuese combinación lineal de otra, su determinante sería 0. Es por ello que el rango indica el número (máximo) de filas o columnas independientes de una matriz. Actividades 12. Halla el rango de las siguientes matrices:
a) A= ⎟⎟⎠
⎞⎜⎜⎝
⎛ −5031
b) B= ⎟⎟⎠
⎞⎜⎜⎝
⎛−−
−642
321 c) C= ⎟⎟
⎠
⎞⎜⎜⎝
⎛− 1142
1073
d) D=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
114521031
e) E=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−− 465153414231
f) F=
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−−
22121300
11451003
13. Halla el rango de las siguientes matrices según los valores de t:
A=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
t111t111t
B=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−−−
t9t36t01120111
Colegio Vizcaya Matemáticas II
37
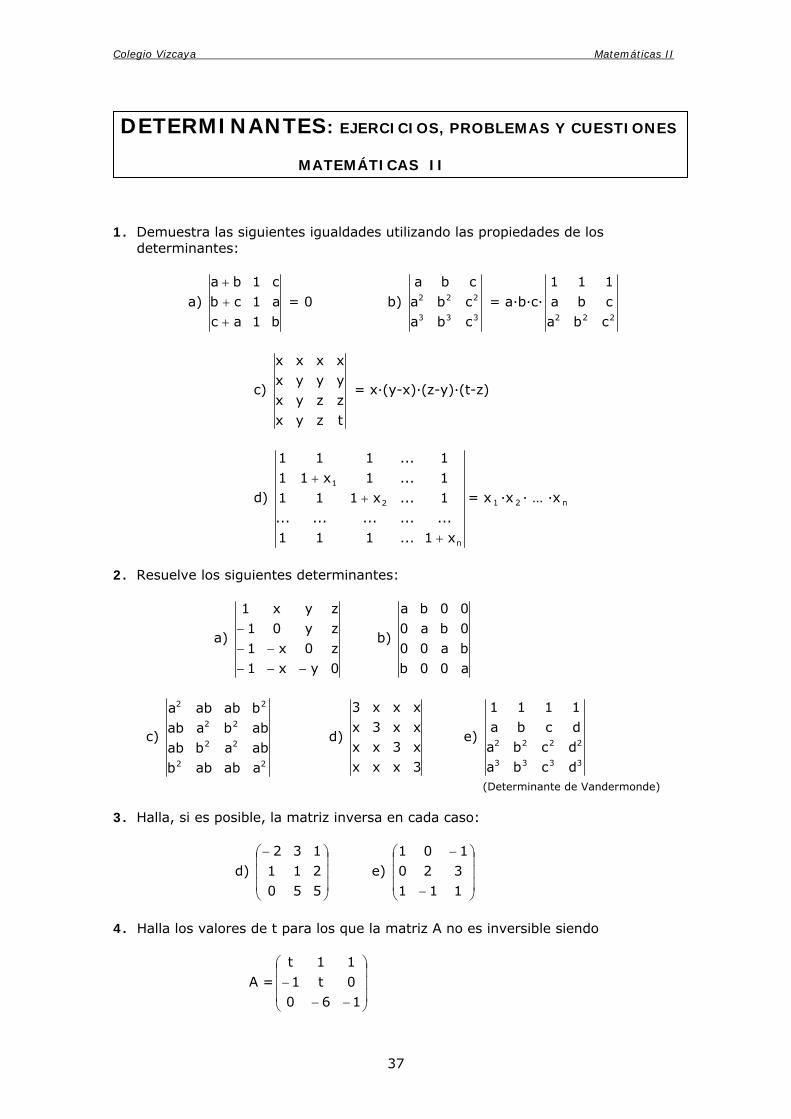
DETERMINANTES: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II 1. Demuestra las siguientes igualdades utilizando las propiedades de los determinantes:
a) b1aca1cbc1ba
+++
= 0 b) 333
222
cbacbacba
= a·b·c·222 cbacba111
c)
tzyxzzyxyyyxxxxx
= x·(y-x)·(z-y)·(t-z)
d)
n
2
1
x1...111...............1...x1111...1x111...111
+
++
= x1 ·x 2 · … ·x n
2. Resuelve los siguientes determinantes:
a)
0yx1z0x1zy01zyx1
−−−−−
− b)
a00bba000ba000ba
c)
22
22
22
22
aababbababababbaabbababa
d)
3xxxx3xxxx3xxxx3
e)
3333
2222
dcbadcbadcba1111
(Determinante de Vandermonde) 3. Halla, si es posible, la matriz inversa en cada caso:
d) ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
550211132
e) ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−
−
111320101
4. Halla los valores de t para los que la matriz A no es inversible siendo
A =⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
1600t111t

Colegio Vizcaya Matemáticas II
38
5. Dadas las matrices A = ⎟⎟⎠
⎞⎜⎜⎝
⎛−− 111t21
y B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
200t31
donde t es un nº real:
a) Halla los valores de t para los que A·B tiene inversa b) Halla los valores de t para los que B·A tiene inversa
6. Resolver la ecuación det(A - xI) = 0, siendo A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
211422001
y x∈R.
7. Dadas las matrices A= ⎟⎟⎠
⎞⎜⎜⎝
⎛− 32
01, B= ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −0218
, C= ⎟⎟⎠
⎞⎜⎜⎝
⎛− 53
21 y D= ⎟⎟
⎠
⎞⎜⎜⎝
⎛ −0211
resuelve, despejando, las siguientes ecuaciones matriciales:
a) AX + 2B – C = D b) (B+C)X – A = D c) 4AX – B – 2D = C d) ABX – CX = 2C
8. Despejar X en las siguientes ecuaciones matriciales: a) ABX = C+A d) AC+3X = B t g) XA + B = A·B t b) AX – B = XC e) B(2A+I)=AXA+B c) AB + CX = A f) BX + 3C = C(B+3I) 9. Halla el valor de k para que el rango de la matriz A sea 2 siendo:
A=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−
461k42031213201
10. Calcular el rango de la matriz A=⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
931421aa1 2
según los valores de a.
11. Hallar los valores de k para los cuales la matriz
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
−−−−−−−
−−
1kkk10kk
321k654k
a) No tiene inversa b) Tiene rango 3
Colegio Vizcaya Matemáticas II
39
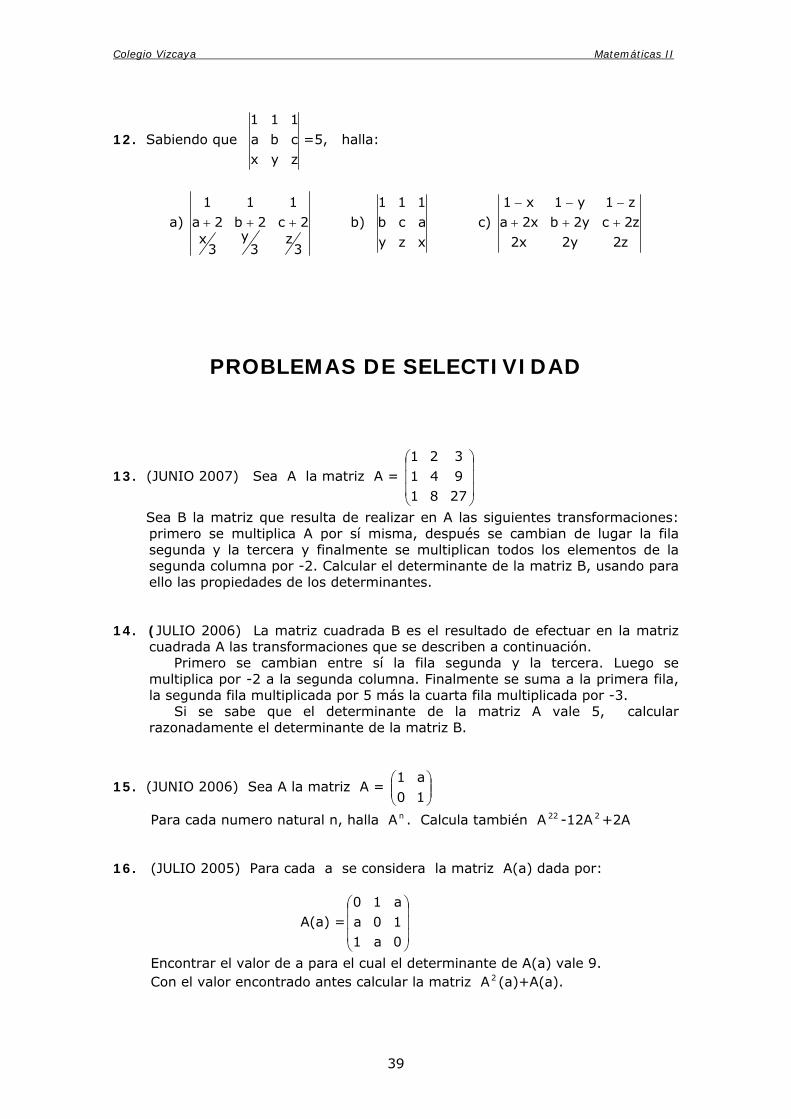
12. Sabiendo que zyxcba111
=5, halla:
a)
3z
3y
3x
2c2b2a111+++ b)
xzyacb111
c) z2y2x2
z2cy2bx2az1y1x1
+++−−−
PROBLEMAS DE SELECTIVIDAD
13. (JUNIO 2007) Sea A la matriz A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
2781941321
Sea B la matriz que resulta de realizar en A las siguientes transformaciones: primero se multiplica A por sí misma, después se cambian de lugar la fila segunda y la tercera y finalmente se multiplican todos los elementos de la segunda columna por -2. Calcular el determinante de la matriz B, usando para ello las propiedades de los determinantes.
14. (JULIO 2006) La matriz cuadrada B es el resultado de efectuar en la matriz
cuadrada A las transformaciones que se describen a continuación. Primero se cambian entre sí la fila segunda y la tercera. Luego se
multiplica por -2 a la segunda columna. Finalmente se suma a la primera fila, la segunda fila multiplicada por 5 más la cuarta fila multiplicada por -3.
Si se sabe que el determinante de la matriz A vale 5, calcular razonadamente el determinante de la matriz B.
15. (JUNIO 2006) Sea A la matriz A = ⎟⎟⎠
⎞⎜⎜⎝
⎛10a1
Para cada numero natural n, halla An . Calcula también A 22 -12A 2 +2A 16. (JULIO 2005) Para cada a se considera la matriz A(a) dada por:
A(a) =⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
0a110aa10
Encontrar el valor de a para el cual el determinante de A(a) vale 9. Con el valor encontrado antes calcular la matriz A2 (a)+A(a).
Colegio Vizcaya Matemáticas II
40
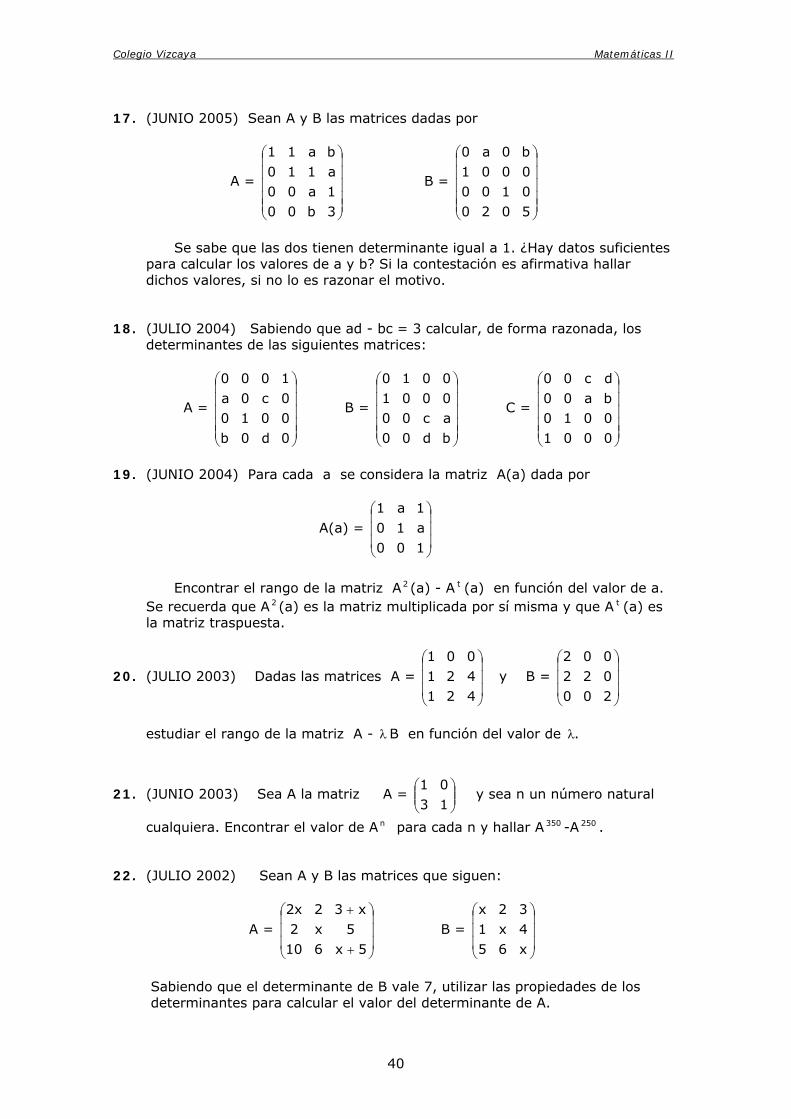
17. (JUNIO 2005) Sean A y B las matrices dadas por
A =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
3b001a00a110ba11
B =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
502001000001b0a0
Se sabe que las dos tienen determinante igual a 1. ¿Hay datos suficientes para calcular los valores de a y b? Si la contestación es afirmativa hallar dichos valores, si no lo es razonar el motivo. 18. (JULIO 2004) Sabiendo que ad - bc = 3 calcular, de forma razonada, los determinantes de las siguientes matrices:
A =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
0d0b00100c0a1000
B =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
bd00ac0000010010
C =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
00010010ba00dc00
19. (JUNIO 2004) Para cada a se considera la matriz A(a) dada por
A(a) = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
100a101a1
Encontrar el rango de la matriz A2 (a) - A t (a) en función del valor de a. Se recuerda que A2 (a) es la matriz multiplicada por sí misma y que A t (a) es la matriz traspuesta.
20. (JULIO 2003) Dadas las matrices A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
421421001
y B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
200022002
estudiar el rango de la matriz A - λB en función del valor de .λ
21. (JUNIO 2003) Sea A la matriz A = ⎟⎟⎠
⎞⎜⎜⎝
⎛1301
y sea n un número natural
cualquiera. Encontrar el valor de An para cada n y hallar A350 -A 250 . 22. (JULIO 2002) Sean A y B las matrices que siguen:
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
+
+
5x6105x2
x32x2 B =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
x654x132x
Sabiendo que el determinante de B vale 7, utilizar las propiedades de los determinantes para calcular el valor del determinante de A.

Colegio Vizcaya Matemáticas II
41
23. (JULIO 2001) Encontrar el valor del siguiente determinante en función de a, b y c:
333
222
cbacba111
24. (JUNIO 1997) ¿Qué condición debe cumplir una matriz cuadrada para que exista su matriz inversa?
Calcular la inversa de la matriz A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
αα00
01021
cuando exista.
CUESTIONES 25. a) Demostrar que si A y B son matrices inversibles, se cumple que: (A·B) 1− =B 1− ·A 1−
b) ¿Sería cierto que (A2 ) 1− = (A 1− ) 2 ?, ¿y (A3 ) 1− = (A 1− ) 3 ? 26. Si A es una matriz tal que A3 = I , ¿Cuánto vale A ?
27. Indica las propiedades de los determinantes que justifican las siguientes igualdades:
a) 131242693
= 6·131121231
b) 130122033
120112033
150132063
+=
c)
0312300115321123
−
−−
= 61
09363001210641123
−
−−
28. ¿A qué es igual el determinante de una matriz diagonal?, ¿y triangular? 29. Razona si es cierta la siguiente afirmación:
412073
−= 3·
4107
−-2·
4107
−

Colegio Vizcaya Matemáticas II
42
30. Una matriz cuadrada A se llama idempotente cuando verifica A2 =A. Demuestra que si A es idempotente, entonces |A|=0 ó |A|=1. 31. Sean A,B y C matrices cuadradas del mismo orden tales que |A| 0≠ y A·B=A·C ¿Podemos asegurar que B=C? Justifica tu respuesta. 32. ¿Es cierta la siguiente igualdad? Razónalo sin realizar los cálculos.
25
12−
= 253
123001
−
33. Si A es una matriz cuadrada de orden 4, puedes saber el valor de: a21 ·A11 +a 22 ·A12 +a 23 ·A13 +a 24 ·A14 34. Si A y B son dos matrices cuadradas del mismo orden , ¿se verifica que |A·B| = |B·A|? Razónalo.
35. Si la matriz A = ⎟⎟⎠
⎞⎜⎜⎝
⎛fedcba
tiene rango 2, ¿qué rango tendrá la matriz B?
B = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
+++ f2ce2bd2afedcba
Colegio Vizcaya Matemáticas II
43
UNIDAD 3
SISTEMAS DE ECUACIONES LINEALES
2º BACHILLER
Colegio Vizcaya Matemáticas II
44
OBJETIVOS DIDÁCTICOS 1. Clasificar los sistemas de ecuaciones lineales respecto a sus soluciones. 2. Profundizar en el método de Gauss para resolver y clasificar sistemas de
ecuaciones lineales. 3. Enunciar, comprender y aplicar la regla de Cramer para la resolución de
sistemas de ecuaciones. 4. Discutir sistemas, dependientes de 1 ó 2 parámetros, aplicando el teorema de
Rouché. CONCEPTOS
1. Ecuaciones lineales. Soluciones. 2. Sistemas de ecuaciones lineales. Clasificación según sus soluciones. 3. Sistemas equivqlentes. 4. Método de Gauss. Clasificación de sistemas por el método de Gauss. 5. Regla de Cramer. 6. Teorema de Rouché. 7. Discusión de sistemas con uno o dos parámetros.

Colegio Vizcaya Matemáticas II
45
1. INTRODUCCIÓN
Definición 1 Se llama ecuación lineal a toda igualdad del tipo: a1x1 + a2x2 + … + anxn = b donde a1, a2, …, an son los coeficientes (datos conocidos), x1, x2, …, xn son las incógnitas (datos por conocer) y b es el término independiente.
Ejemplos: 3x - 2y = 1 x + 3y - 2z + t – 5 = 0 3x – 1 = 2 Definición 2
Se llama solución de una ecuación lineal a un conjunto de números (s1,s2, …,sn) que sustituidos en el lugar de las incógnitas hacen que se verifique la igualdad. Cada solución se llama solución particular y el conjunto de todas ellas se denomina solución general. Ejemplo: Dada la ecuación 2x – y + z = 3 , (1,0,1) es una solución Particular
La solución general es:
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
==
−+=
zzyy
2zy3
x
y,z R∈
2. SISTEMAS DE ECUACIONES LINEALES Definición 3
Se llama sistema de m ecuaciones lineales con n incógnitas a un conjunto de m ecuaciones de la forma:
⎪⎪⎭
⎪⎪⎬
⎫
=+++
=+++=+++
bxa...xaxa
..........................................bxa...xaxabxa...xaxa
mnmn2m21m1
2n2n222121
1n1n212111
Ejemplos:
⎪⎩
⎪⎨
⎧
=+−=+−
=+−
7z4y2x31y2x
0zy3x2
⎪⎪⎩
⎪⎪⎨
⎧
−=+=−=+−
=+
2yx41y2x34y2x
5yx
⎩⎨⎧
=−+−=−+−
2t4zy3x20tzy2x
donde:
aij ⎩⎨⎧
≤≤≤≤
nj1mi1
son los coeficientes,
xi ni1 ≤≤ son las incógnitas bj mj1 ≤≤ son los términos independientes

Colegio Vizcaya Matemáticas II
46
Definición 4 Se llama solución del sistema a un conjunto de n números reales (s1, s2, …, sn) que sustituidos en las incógnitas hacen que se verifiquen todas las ecuaciones simultáneamente. El conjunto de todas las soluciones se llama solución general y cada una de ellas solución particular. Ejemplos:
1) (1,2,0) es la solución del sistema ⎪⎩
⎪⎨
⎧
=+−=++−
=++
0z2yx23z3y2x
3zyx
2) ⎪⎩
⎪⎨
⎧
=−=−=
zzz21yz32x z R∈ es la solución general del sistema
⎩⎨⎧
=++−=+−
0zy2x1zyx
Definición 5 Un sistema se dice homogéneo si todos los términos independientes son nulos (bi = 0, ∀ i). Ejemplo:
⎪⎩
⎪⎨
⎧
=++=−+−
=−
0zy2x30zy2x
0y3x
Observa que los sistemas homogéneos siempre tienen, al menos, la solución trivial (0,0…,0)
Definición 6 Se dice que un sistema es compatible si tiene solución. En caso contrario se dice que es incompatible. En el primer caso, si la solución es única se trata de un sistema compatible determinado. Por el contrario, si tiene infinitas soluciones, se le llama compatible indeterminado. Ejemplos: En el caso de los dos ejemplos citados anteriormente en esta página, se puede observar que el sistema del ejemplo 1) es COMPATIBLE DETERMINADO (solución única) y el del ejemplo 2) es COMPATIBLE INDETERMINADO (infinitas soluciones en función del parámetro z) Un ejemplo de sistema INCOMPATIBLE (ecuaciones contradictorias) podría ser:
⎩⎨⎧
=−=−
0y4x23y2x
Colegio Vizcaya Matemáticas II
47
3. SISTEMAS EQUIVALENTES
Definición 7 Dos sistemas se dicen equivalentes si, teniendo las mismas incógnitas, tienen las mismas soluciones (No necesariamente el mismo nº de ecuaciones). Ejemplo:
Los sistemas ⎩⎨⎧
=−=+
1yx22yx
y ⎪⎩
⎪⎨
⎧
=−=+=+−
1y2x35yx4
2y3x son equivalentes pues ambos
tienen la misma solución (1,1) De hecho, al utilizar los métodos de reducción, Gauss etc. para resolver sistemas, se emplea la estrategia de cambiar el sistema inicial por otro equivalente más sencillo de resolver, a través de una serie de transformaciones que, aunque varían el sistema, no cambian su solución. Estas transformaciones son las siguientes:
Transformaciones Equivalentes
1) Cambiar el orden de las ecuaciones del sistema 2) Despejar una incógnita de una ecuación y sustituirla en las demás 3) Multiplicar(dividir) una ecuación por un nº real distinto de 0. 4) Suprimir una ecuación que sea combinación lineal de otras ecuaciones del
sistema. 5) Cambiar una ecuación por la suma de ella mas una combinación lineal de
otras. 4. MÉTODOS DE RESOLUCIÓN DE SISTEMAS
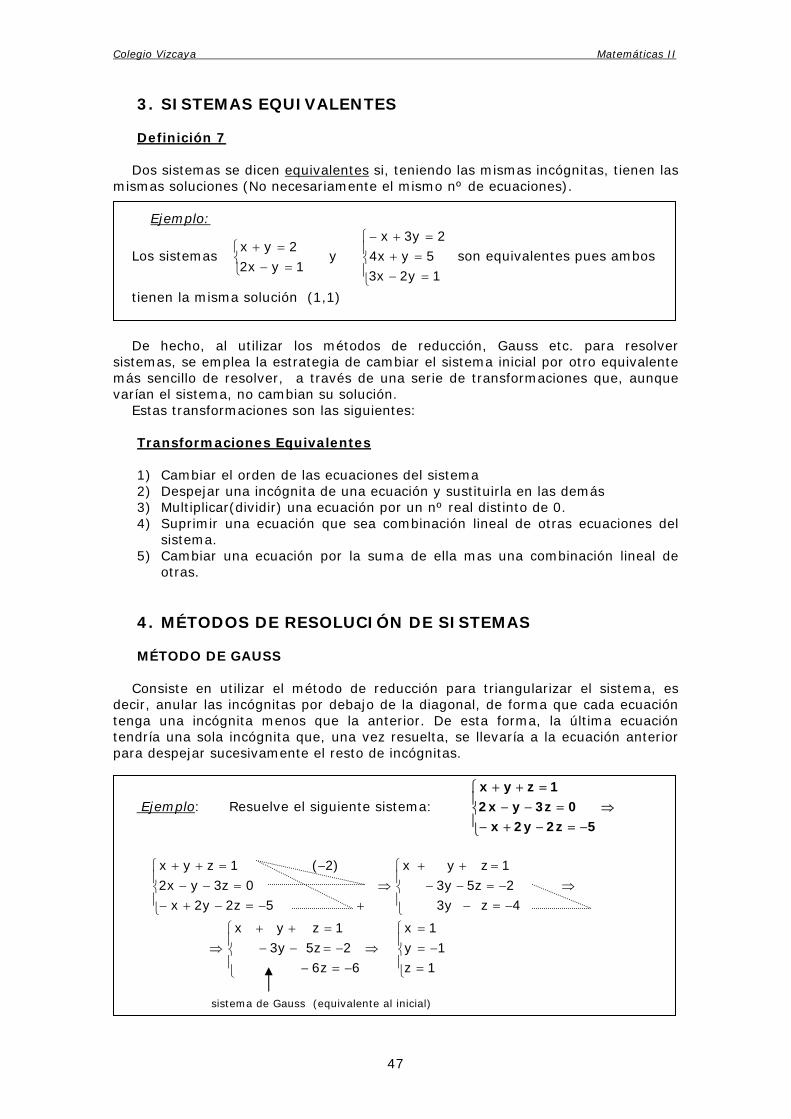
MÉTODO DE GAUSS
Consiste en utilizar el método de reducción para triangularizar el sistema, es decir, anular las incógnitas por debajo de la diagonal, de forma que cada ecuación tenga una incógnita menos que la anterior. De esta forma, la última ecuación tendría una sola incógnita que, una vez resuelta, se llevaría a la ecuación anterior para despejar sucesivamente el resto de incógnitas.
Ejemplo: Resuelve el siguiente sistema: ⇒⎪⎩
⎪⎨
⎧
−=−+−=−−
=++
5z2y2x0z3yx2
1zyx
⇒⎪⎩
⎪⎨
⎧
+−=−+−=−−
−=++
5z2y2x0z3yx2
)2(1zyx⇒
⎪⎩
⎪⎨
⎧
−=−−=−−
=++
4zy32z5y31zyx
⇒ ⇒⎪⎩
⎪⎨
⎧
−=−−=−−
=++
6z62z5y3
1zyx
⎪⎩
⎪⎨
⎧
=−=
=
1z1y
1x
sistema de Gauss (equivalente al inicial)

Colegio Vizcaya Matemáticas II
48
Pueden darse los siguientes casos:
1) Si la última ecuación es de la forma axn = b, el sistema es compatible determinado.
2) Si la última ecuación es de la forma 0 = 0, el sistema es compatible indeterminado.
3) Si la última ecuación es de la forma 0 = k siendo k≠ 0, el sistema es incompatible.
Hasta aquí se han recordado aspectos sobre los sistemas de ecuaciones lineales y su resolución, ya vistos en cursos anteriores. La novedad consistirá en aplicar a la resolución de sistemas lo aprendido sobre matrices y determinantes, para introducir métodos o sistemáticas que aporten alguna mejora.
EXPRESIÓN MATRICIAL DE UN SISTEMA
Sabemos que una igualdad matricial se transforma en un sistema de ecuaciones:
⎟⎟⎠
⎞⎜⎜⎝
⎛=⎟⎟
⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛ −21-01
tzyx
· 1321
⇒
⎪⎪⎩
⎪⎪⎨
⎧
=+−=+
=−=−
2ty31zx3
0t2y1z2x
De la misma manera podemos pensar en el proceso inverso, es decir, en obtener una igualdad matricial a partir de un sistema de ecuaciones dado. Para ello definiremos las siguientes matrices: Dado el sistema genérico:
⎪⎪⎭
⎪⎪⎬
⎫
=+++
=+++=+++
bxa...xaxa
..............................................bxa...xaxabxa...xaxa
mnmn2m21m1
2n2n222121
1n1n212111
Llamamos A a la matriz de los coeficientes:
A =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
a...aa
............a...aaa...aa
mnm2m1
2n2221
1n1211
de orden mxn
Llamamos X a la matriz columna de las incógnitas: X =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
x
...xx
n
2
1
de orden nx1
Colegio Vizcaya Matemáticas II
49
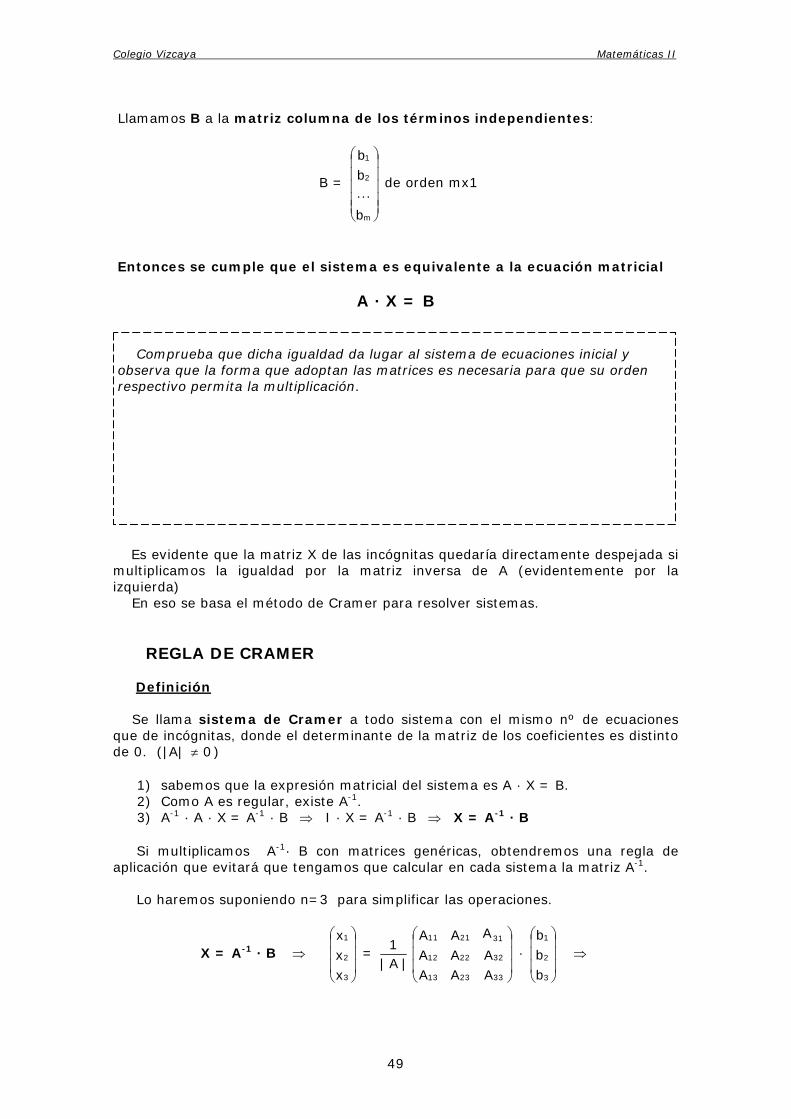
Llamamos B a la matriz columna de los términos independientes:
B =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
b
...bb
m
2
1
de orden mx1
Entonces se cumple que el sistema es equivalente a la ecuación matricial
A · X = B Comprueba que dicha igualdad da lugar al sistema de ecuaciones inicial y observa que la forma que adoptan las matrices es necesaria para que su orden respectivo permita la multiplicación.
Es evidente que la matriz X de las incógnitas quedaría directamente despejada si multiplicamos la igualdad por la matriz inversa de A (evidentemente por la izquierda) En eso se basa el método de Cramer para resolver sistemas. REGLA DE CRAMER Definición Se llama sistema de Cramer a todo sistema con el mismo nº de ecuaciones que de incógnitas, donde el determinante de la matriz de los coeficientes es distinto de 0. (|A| 0≠ )
1) sabemos que la expresión matricial del sistema es A · X = B. 2) Como A es regular, existe A-1. 3) A-1 · A · X = A-1 · B ⇒ I · X = A-1 · B ⇒ X = A-1 · B
Si multiplicamos A-1· B con matrices genéricas, obtendremos una regla de aplicación que evitará que tengamos que calcular en cada sistema la matriz A-1. Lo haremos suponiendo n=3 para simplificar las operaciones.
X = A-1 · B ⇒ ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
xxx
3
2
1
= |A|
1
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
AAAAAA
AAA
332313
322212
312111
· ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
bbb
3
2
1
⇒

Colegio Vizcaya Matemáticas II
50
⇒ ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
xxx
3
2
1
= |A|
1
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
++++++
333232131
323222121
313212111
AbAbAbAbAbAbAbAbAb
⇒
x1 = A
AbAbAb 313212111 ++ =
aaaaaaaaa
aabaabaab
333231
232221
131211
33323
23222
13121
El numerador es el producto de los elementos b 1 , b 2 , b 3
por los adjuntos de la columna 1, es decir, es el desarrollo por la c 1 de un determinante en el que los elementos de la
primera columna son b1 , b 2 , b 3 .
x2 = A
AbAbAb 323222121 ++ =
Aabaabaaba
33331
23221
13111
(desarrollo por la columna 2)
x3 = A
AbAbAb 333232131 ++ =
Abaabaabaa
33231
22221
11211
(desarrollo por la columna 3)
Ejemplo.
Resolver ⎪⎭
⎪⎬
⎫
=−−=−+=+−
3- zyx2zy2x1zyx
Sea la matriz A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
−
111112
111
Por la regla de Cramer:
x =
1-1-11-1211-1
1-1-3-1-1211-1
= 121121123321
−−−+−−−−+−−−
= 66
−−
= 1 y = 6-
1-3-11-22111
= 6
12−−
= 2
z = 6-
3-1-121211-1
= 6
12−−
= 2 solución (1,2,2)
Colegio Vizcaya Matemáticas II
51
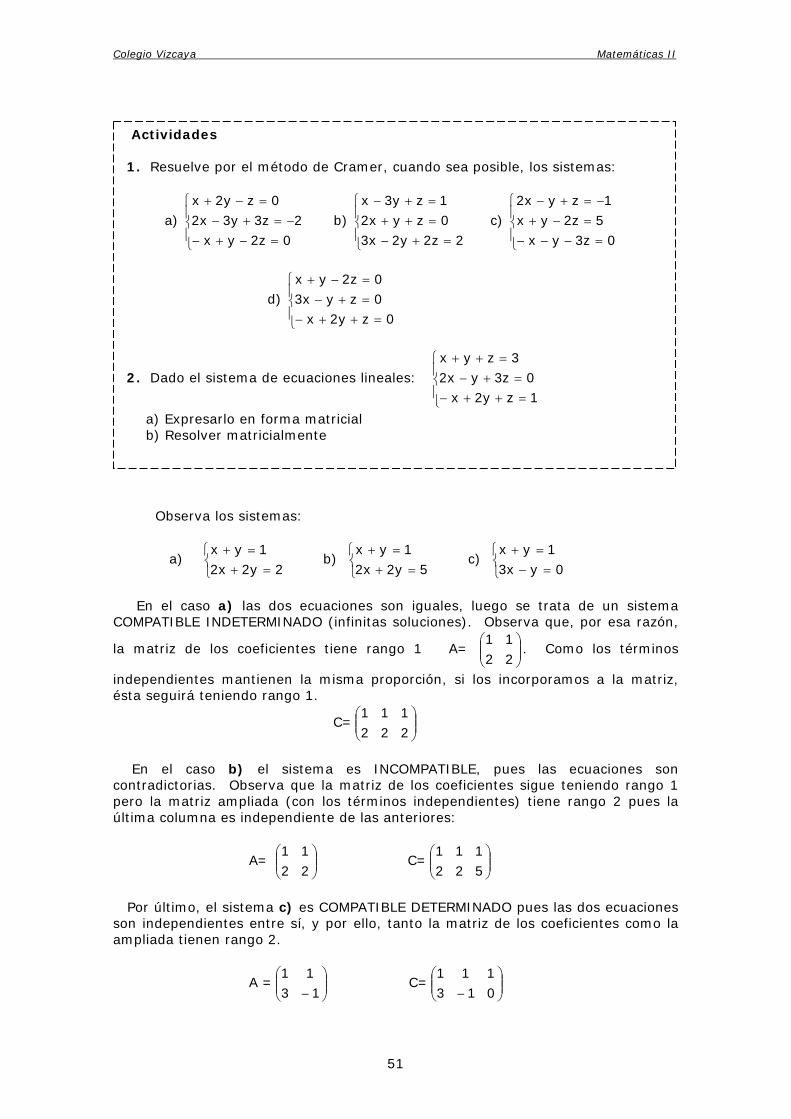
Actividades 1. Resuelve por el método de Cramer, cuando sea posible, los sistemas:
a) ⎪⎩
⎪⎨
⎧
=−+−−=+−
=−+
0z2yx2z3y3x2
0zy2x b)
⎪⎩
⎪⎨
⎧
=+−=++=+−
2z2y2x30zyx21zy3x
c) ⎪⎩
⎪⎨
⎧
=−−−=−+−=+−
0z3yx5z2yx1zyx2
d) ⎪⎩
⎪⎨
⎧
=++−=+−=−+
0zy2x0zyx30z2yx
2. Dado el sistema de ecuaciones lineales: ⎪⎩
⎪⎨
⎧
=++−=+−
=++
1zy2x0z3yx2
3zyx
a) Expresarlo en forma matricial b) Resolver matricialmente Observa los sistemas:
a) ⎩⎨⎧
=+=+
2y2x21yx
b) ⎩⎨⎧
=+=+
5y2x21yx
c) ⎩⎨⎧
=−=+
0yx31yx
En el caso a) las dos ecuaciones son iguales, luego se trata de un sistema COMPATIBLE INDETERMINADO (infinitas soluciones). Observa que, por esa razón,
la matriz de los coeficientes tiene rango 1 A= ⎟⎟⎠
⎞⎜⎜⎝
⎛2211
. Como los términos
independientes mantienen la misma proporción, si los incorporamos a la matriz, ésta seguirá teniendo rango 1.
C= ⎟⎟⎠
⎞⎜⎜⎝
⎛222111
En el caso b) el sistema es INCOMPATIBLE, pues las ecuaciones son contradictorias. Observa que la matriz de los coeficientes sigue teniendo rango 1 pero la matriz ampliada (con los términos independientes) tiene rango 2 pues la última columna es independiente de las anteriores:
A= ⎟⎟⎠
⎞⎜⎜⎝
⎛2211
C= ⎟⎟⎠
⎞⎜⎜⎝
⎛522111
Por último, el sistema c) es COMPATIBLE DETERMINADO pues las dos ecuaciones son independientes entre sí, y por ello, tanto la matriz de los coeficientes como la ampliada tienen rango 2.
A = ⎟⎟⎠
⎞⎜⎜⎝
⎛− 1311
C= ⎟⎟⎠
⎞⎜⎜⎝
⎛− 013
111

Colegio Vizcaya Matemáticas II
52
Parece evidente que existe una relación directa entre la compatibilidad del sistema y los rangos de la matriz de los coeficientes y de la matriz ampliada, pues dicho rango revela la dependencia o independencia entre las ecuaciones. De ello trata el teorema de Rouché-Frobenius. Así como la regla de Cramer permite resolver sistemas, el teorema de Rouché permite clasificarlos es función de los rangos de la matriz de los coeficientes A y de la ampliada C.
5. TEOREMA DE ROUCHÉ- FROBENIUS Dado el sistema:
⎪⎪⎭
⎪⎪⎬
⎫
=+++
=+++=+++
bxa...xaxa
..............................................bxa...xaxabxa...xaxa
mnmn2m21m1
2n2n222121
1n1n212111
donde A =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
a...aa
............a...aaa...aa
mnm2m1
2n2221
1n1211
es la matriz de los coeficientes
y C =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
ba...aa
...............ba...aaba...aa
mmnm2m1
22n2221
11n1211
es la matriz ampliada, entonces se
cumple que: La condición necesaria y suficiente para que el sistema tenga solución es que el rango de la matriz A de los coeficientes y el de la matriz C ampliada, sean iguales, es decir El sistema tiene solución ⇔ rg(A) = rg(C)
Demostración ⇒ Si el sistema tiene solución (s1, s2, …, sn) entonces.
C =
⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜
⎝
⎛
+++
++++++
sa...sasaa...aa
...............sa...sasaa...aasa...sasaa...aa
nmn2m21m1mnm2m1
n2n2221212n2221
n1n2121111n1211
por tanto la última columna es combinación lineal de los anteriores y por tanto no aumenta el rango, es decir:
rg(A) = rg(C)
Colegio Vizcaya Matemáticas II
53
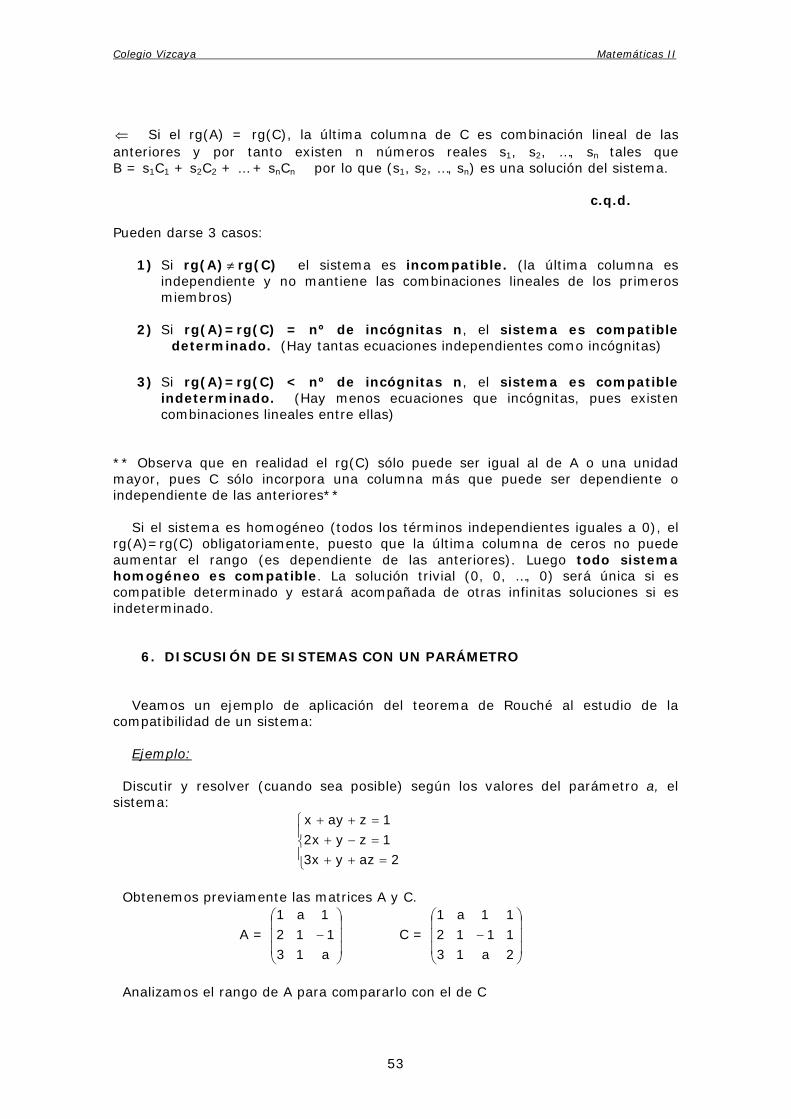
⇐ Si el rg(A) = rg(C), la última columna de C es combinación lineal de las anteriores y por tanto existen n números reales s1, s2, …, sn tales que B = s1C1 + s2C2 + … + snCn por lo que (s1, s2, …, sn) es una solución del sistema. c.q.d. Pueden darse 3 casos:
1) Si rg(A) ≠ rg(C) el sistema es incompatible. (la última columna es independiente y no mantiene las combinaciones lineales de los primeros miembros)
2) Si rg(A)=rg(C) = nº de incógnitas n, el sistema es compatible
determinado. (Hay tantas ecuaciones independientes como incógnitas)
3) Si rg(A)=rg(C) < nº de incógnitas n, el sistema es compatible indeterminado. (Hay menos ecuaciones que incógnitas, pues existen combinaciones lineales entre ellas)
** Observa que en realidad el rg(C) sólo puede ser igual al de A o una unidad mayor, pues C sólo incorpora una columna más que puede ser dependiente o independiente de las anteriores** Si el sistema es homogéneo (todos los términos independientes iguales a 0), el rg(A)=rg(C) obligatoriamente, puesto que la última columna de ceros no puede aumentar el rango (es dependiente de las anteriores). Luego todo sistema homogéneo es compatible. La solución trivial (0, 0, …, 0) será única si es compatible determinado y estará acompañada de otras infinitas soluciones si es indeterminado. 6. DISCUSIÓN DE SISTEMAS CON UN PARÁMETRO Veamos un ejemplo de aplicación del teorema de Rouché al estudio de la compatibilidad de un sistema: Ejemplo: Discutir y resolver (cuando sea posible) según los valores del parámetro a, el sistema:
⎪⎩
⎪⎨
⎧
=++=−+=++
2azyx31zyx21zayx
Obtenemos previamente las matrices A y C.
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−a13112
1a1 C =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
2a13111211a1
Analizamos el rango de A para compararlo con el de C

Colegio Vizcaya Matemáticas II
54
|A| = a+2-3a-3-2a2 +1 = -2a2 -2a = -2a(a+1)=0 ⇒ a=0 ó a=-1 Se distinguen entonces 3 posibles casos: 1er Caso: a ≠ 0,-1 En este caso rg(A) = 3 ( pues |A|≠ 0) y rg(C) =3 necesariamente, pues no puede ser menor que el de A y tampoco puede ser 4 por ser C de orden 3x4. Según el teorema de Rouché, para cada valor de a ≠ 0,-1, se trataría de un sistema compatible determinado ya que rg(A) = rg(C) = nº de incógnitas. Para resolverlo utilizaremos la regla de Cramer:
x =
a13112
1a1
a12111
1a1
−
−
= )1a(a2
1a2a21a 2
+−+−−−+
= )1a(a2
aa2
+−−−
= )1a(a2
)1a(a+−+−
= 21
y = )1a(a2
a23112
111
+−
−
= )1a(a2
2a2334a+−
+−−−+=
)1a(a2a+−
−=
)1a(21+
z = )1a(a2
2131121a1
+−=
)1a(a21a43a322
+−−−−++
= )1a(a2
a+−
− =
)1a(21+
Hemos obtenido así la solución única para cada posible sistema según cuál sea el valor de a.
2º Caso: a=0 A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−013112
101 C =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛−
201311121101
En este caso rg(A) 3≠ puesto que |A|=0. Como 01201
≠ entonces rg(A) = 2.
Igualmente, rg(C) = 2 pues todos los menores de orden 3 son 0, al ser la última fila la suma de las dos primeras. Se trata entonces de un sistema compatible indeterminado ya que: rg(A) = rg(C) < nº incógnitas. Para resolverlo podemos prescindir de la tercera ecuación por ser una combinación lineal de las anteriores.
⎩⎨⎧
=−+=+
1zyx21zx

Colegio Vizcaya Matemáticas II
55
Por tratarse de un sistema de dos ecuaciones con tres incógnitas, dejaremos una cualquiera de ellas como parámetro o variable (z por ejemplo en este caso) x = 1 – z y = 1 – 2x + z = 1 – 2(1 – z) + z = -1 + 3z z = z luego su solución es: (1 - z, -1 + 3z, z) donde z∈R
3er Caso: a = -1 A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−
113112
111 C =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−
211311121111
Sabemos que rg(A) 3≠ puesto que |A|=0. Como 01211
≠−
entonces rg(A) = 2.
Sin embargo rg(C) = 3 ya que 213112111 −
= 1 ≠ 0
Por el teorema de Rouché el sistema es incompatible puesto que rg(A) ≠ rg(C) y por tanto, no tiene solución. Actividades 3. Discute según los valores de los parámetros a ó m los sistemas:
a) ⎪⎩
⎪⎨
⎧
=−−=−−=+−
a4zy2x33z2yxazyx2
b) ⎪⎩
⎪⎨
⎧
=++=++=++
1zayx1zyx1zyax
c) ⎪⎩
⎪⎨
⎧
−=+++=−+
−=+++
1az)1a(x)1a(0y)a2(x2
2a2z2ayx)2a2(
7. DiSCUSIÓN DE SISTEMAS CON 2 PARÁMETROS Ejemplo: Discutir y resolver, según los valores de a y b el sistema:
⎪⎭
⎪⎬
⎫
=−+=−+=+−
b2zayx3zy2x1z2yx
Consideramos las matrices A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
2-a11-1212-1
y C = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−
b2a131121121

Colegio Vizcaya Matemáticas II
56
|A| = -2+2a+2–1–8+a = 3a–9 = 0 ⇒ a = 3 Caso 1: a ≠ 3 Como |A| ≠ 0, rg(A) = 3 y rg(C) = 3 necesariamente. Por el teorema de Rouché se trata de un sistema Compatible Determinado. Resuélvelo por el método de Cramer
Caso 2: a = 3 A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
2-311-1212-1
y C = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
b2-3131-12112-1
Sabemos que rg(A) 3≠ puesto que |A|=0. Como 01221
≠−
entonces rg(A) = 2.
Para hallar el rango de C estudiamos primero los menores de orden 3.
b1-1312111
− = -b – 4 + 3 + 1 – 2b + 6 = -3b +6 = 0 ⇒ b = 2
Establecemos dos subcasos, pues el rg(C) depende de si b es igual o distinto a 2. Caso 2.1: En este caso rg(A) = 2 rg(C) = 3 Por el teorema de Rouché se trata de un Sistema Incompatible.
a = 3 b ≠ 2

Colegio Vizcaya Matemáticas II
57
Caso 2.2: C = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
22-3131-12112-1
En este caso rg(A) = 2 rg(C) = 2 ya que la segunda ecuación es la suma de las otras dos. Por tanto, rg(A) = rg(C) = 2 < nº incógnitas: Sistema Compatible Indeterminado dependiente de un parámetro
Halla, en este caso, la solución del sistema
a = 3 b = 2

Colegio Vizcaya Matemáticas II
58
SISTEMAS DE ECUACIONES LINEALES: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II
1. Dado el sistema: ⎪⎩
⎪⎨
⎧
=++=++
=++
azay2x2azayx2
1zy2x calcula los valores del parámetro a para
que el sistema sea: a) compatible determinado b) compatible indeterminado c) incompatible 2. Halla para qué valor de m el siguiente sistema tiene solución distinta de la
trivial (0,0,0): ⎪⎩
⎪⎨
⎧
=−+−=++=+−
0zy2x0mzyx0z3yx2
3. Discute y resuelve cuando sea posible, según los valores de los parámetros a ó m los sistemas:
a) ⎪⎩
⎪⎨
⎧
=++=+−
=++
0z4yx80zyax
0z2y3xa2
b) ⎪⎩
⎪⎨
⎧
=+++−=++
+=++
mzymx)1m(2mzyx
2mzmyx c)
⎪⎩
⎪⎨
⎧
=−+−
+=+
=−
a2z)aa(yx
1a2zax
ayx
2
2
d) ⎪⎩
⎪⎨
⎧
−=+++−=+−+
−=+++
1mz)1m(x)1m(1mzy)1m(mx
1mzyx)2m( e)
⎪⎪⎩
⎪⎪⎨
⎧
−=+−=−−=−+
=++
2zyx1zymx8z3y2x
2zyx
PROBLEMAS DE SELECTIVIDAD 4. (JULIO 2007) Sea S el sistema de ecuaciones lineales
⎪⎪
⎩
⎪⎪
⎨
⎧
=++
=++=++
A710
Azy8x
14z9y4x6z3y2x
Estudiar la compatibilidad del sistema en función de A. Resolver para A=0.

Colegio Vizcaya Matemáticas II
59
5. (JUNIO 2007) Sea S el sistema de ecuaciones lineales
⎪⎩
⎪⎨
⎧
=++=++
=++
Azy2x23z2y3Ax
0zyx
Estudiar la compatibilidad del sistema en función de A. Resolver para A=5. 6. (JULIO 2006) Discutir la compatibilidad del siguiente sistema de ecuaciones
en función del parámetro a: ⎪⎩
⎪⎨
⎧
=+−=−+=+−
aazy3x31zyxazyx
7. (JUNIO 2006) Se considera el sistema de ecuaciones lineales
S = ⎪⎩
⎪⎨
⎧
+=++=++
=++
)1m(2mzy4x39z4y3x2
6z3y2x
¿Existe algún valor de m para el cual el sistema sea compatible indeterminado? En caso negativo razonar la respuesta. Si la respuesta es positiva, hallar la solución del sistema en ese caso.
8. (JULIO 2005) Dado el sistema S = ⎪⎩
⎪⎨
⎧
=++=++=++
Azyx0z3Ayx0z3y2x
Discutir su compatibilidad en función del parámetro A. Resolver en los casos en que sea compatible indeterminado.
9. (JUNIO 2005) Dado el sistema de ecuaciones S = ⎪⎩
⎪⎨
⎧
=++=++
=++
2azyx3azyx2
1zyx
Discutir su compatibilidad en función del parámetro a. 10. (JULIO 2004) Discutir la compatibilidad del siguiente sistema de ecuaciones
S = ⎪⎩
⎪⎨
⎧
=++=−+=++
2azyx31zyx21zayx
en función del parámetro a.
11. (JUNIO 2004) Dado el sistema S = ⎪⎩
⎪⎨
⎧
=++=+
=++
a2azy2x30yx2
2zyx
Demostrar que es compatible para todos los valores de a. Resolver en los casos en que sea compatible indeterminado.

Colegio Vizcaya Matemáticas II
60
12. (JULIO 2003) Dado el sistema de ecuaciones S = ⎪⎩
⎪⎨
⎧
=−+=++=++
CzyxBzyxAzy2x
demostrar que es compatible determinado para cualquier valor de A,B y C y encontrar la solución en función de dichos valores.
13. (JUNIO 2003) Discutir el sistema S = ⎪⎩
⎪⎨
⎧
=++=++
=++
3z2yx2zyax
0zyx en función del
valor de a. Resolver en los casos en que sea compatible. 14. (JULIO 2002) Se considera el sistema de ecuaciones S dado por:
S = ⎪⎩
⎪⎨
⎧
=−−=−=+−
0yx2azx
azyx
Discutir la compatibilidad en función de a. Resolver en los casos de Compatibilidad.
15. (JUNIO 2002) Discutir el sistema S = ⎪⎩
⎪⎨
⎧
=++=++
=++
3z3yx2a2z2yx2
azyx2 en función del
valor de a. Resolver en los casos en que sea compatible. 16. (JULIO 2001) Discutir el siguiente sistema de ecuaciones en función del
valor de a. ⎪⎩
⎪⎨
⎧
=+=++
=−+
5azx45azayx3
1zyx
Resolverlo cuando sea compatible determinado. 17. (JUNIO 2001) Estudiar la compatibilidad del siguiente sistema
S = ⎪⎩
⎪⎨
⎧
=++=++
=++
1azyx21zyax
a2z2y2x4 en función del parámetro a.
Resolver en los casos en que sea compatible indeterminado.
Colegio Vizcaya Matemáticas II
61
CUESTIONES
18. Sabemos que el rango de la matriz ampliada en un sistema de cuatro
ecuaciones con tres incógnitas, es 4. ¿Qué se puede decir de la compatibilidad del sistema? Razona la respuesta.
19. Si (x=0, y=2, z=-1) es una solución de un sistema homogéneo de 3
ecuaciones con 3 incógnitas, ¿cuánto valdrá entonces el determinante de la matriz de los coeficientes?
20. En un sistema de tres ecuaciones con tres incógnitas, ¿qué condición deben
cumplir los coeficientes del sistema para que se verifique rg(A)=3 y rg(C) = 2?
21. En un sistema del mismo número de ecuaciones que de incógnitas, el
determinante de la matriz de los coeficientes es 0. Razona: a) ¿Puede ser compatible? b) ¿Puede tener solución única? c) ¿Se puede aplicar la regla de Cramer? 22. El rango de la matriz de los coeficientes de un sistema de tres ecuaciones con
tres incógnitas es igual a 1. ¿Qué rango, como máximo, puede tener la matriz ampliada?
23. Dado el sistema: ⎩⎨⎧
=++−=+−
1z2y3x3zyx2
a) Añade una ecuación para que el sistema sea incompatible b) Añade una ecuación para que el sistema sea compatible indeterminado

Colegio Vizcaya Matemáticas II
62
Colegio Vizcaya Matemáticas II
63
UNIDAD DIDÁCTICA 4
ESPACIO AFÍN
2º BACHILLER
Colegio Vizcaya Matemáticas II
64
OBJETIVOS DIDÁCTICOS 1. Conocer las distintas ecuaciones de la recta. 2. Determinar una recta. 3. Conocer el concepto de plano y sus ecuaciones. 4. Estudiar las posiciones relativas entre los distintos elementos del espacio afín:
entre dos rectas, entre dos o tres planos y entre recta y plano. 5. Conocer los haces de planos en el espacio.
CONCEPTOS
1. Sistemas de referencia. Espacio afín. 2. Ecuaciones de la recta. Determinación de una recta. 3. Ecuaciones del plano. Determinación del plano. Ecuaciones de algunos planos. 4. Posición relativa recta-recta, plano-plano, recta-plano y entre 3 planos. 5. Haz de planos paralelos. 6. Haz de planos secantes en una recta.

Colegio Vizcaya Matemáticas II
65
ESPACIO AFÍN
1. INTRODUCCIÓN Definición: Llamamos V 3 al conjunto de los vectores libres del espacio.
(Se entiende por vector libre el conjunto formado por un vector a y todos los vectores de su mismo módulo, dirección y sentido) Definición: Llamamos E al conjunto de puntos del espacio. Fijado un punto O∈E llamado origen, cada punto X del espacio forma con O un
vector fijo OX . Esto nos permite “localizar” cualquier punto del espacio a través de
su vector de posición OX . Definición: Llamamos espacio afín y lo expresamos E 3 a la terna (E, V 3 ,f) donde f es la aplicación que asocia a cada par de puntos de E, el vector que forman, es decir: f: E x E V3
(A,B) AB de manera que:
1) AB = CBAC + ∀ A,B,C ∈E
2) Fijado un punto O∈E, se cumple que ∀ v 3V∈ , ∃ ! A E∈ / OAv = Definición: Se llama sistema de referencia de un espacio afín al conjunto
{ }w,v,u,O donde O es el punto origen y { }w,v,u es una base de V3 . **Recuerda que llamamos base de V 3 a cualquier conjunto de tres vectores
linealmente independientes { }w,v,u . Se cumple que cualquier otro vector de V 3 se podrá escribir como combinación lineal de dichos vectores:
3V a ∈∀ wvu a λ+β+α= siendo R λ ,β ,α ∈ ** Observa que podemos utilizar lo aprendido sobre matrices y determinantes para determinar si tres vectores son o no independientes sin más que calcular el determinante de orden tres que forman: si es distinto de 0 serán independientes y formarán base. Definición: Se llaman coordenadas cartesianas de un punto cualquiera A ∈E a
las coordenadas del vector OA en la base { }w,v,u , es decir, a la terna (a,b,c) tal
que: wcvbuaOA ++= .
** Si no se especifica otra cosa, se entiende que { }w,v,u es la base canónica {(1,0,0), (0,1,0),(0,0,1)} **
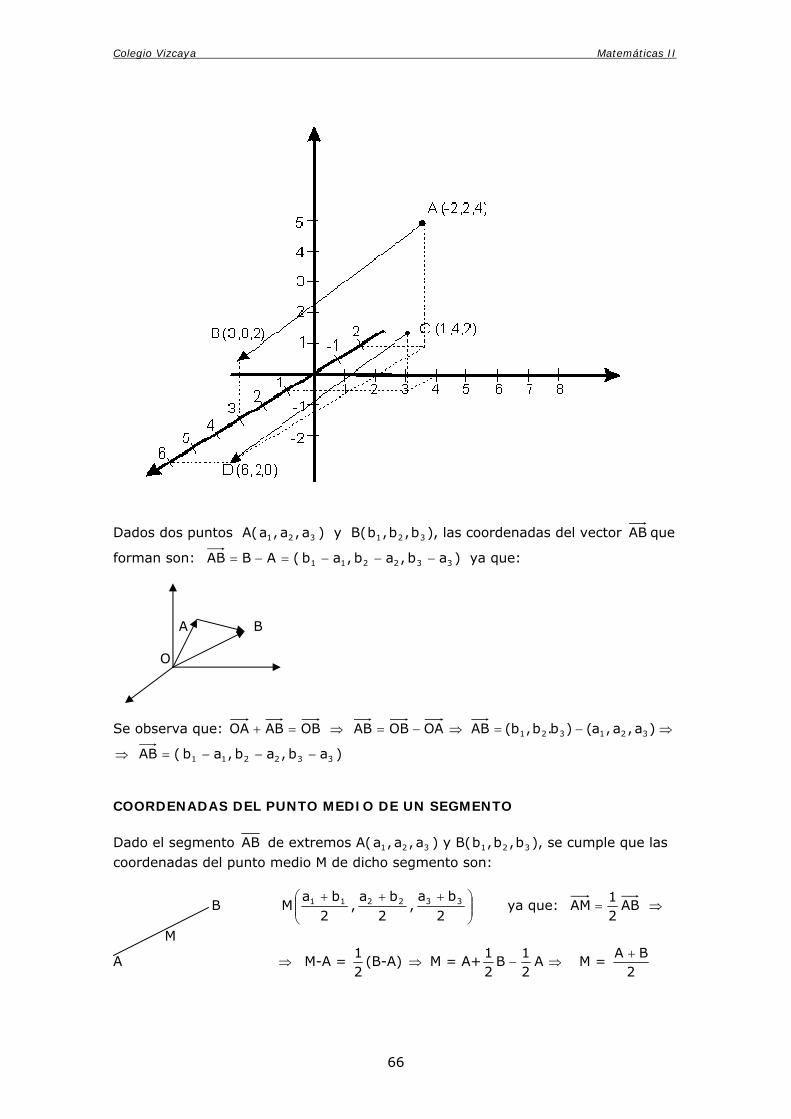
Colegio Vizcaya Matemáticas II
66
Dados dos puntos A( 321 a,a,a ) y B( 321 b,b,b ), las coordenadas del vector AB que
forman son: 332211 ab ,ab ,ab (ABAB −−−=−= ) ya que: A B O
Se observa que: OBABOA =+ ⇒ OAOBAB −= )a,a,a()b.b,(b AB 321321 −=⇒ ⇒
⇒ 332211 ab ,ab ,ab (AB −−−= ) COORDENADAS DEL PUNTO MEDIO DE UN SEGMENTO Dado el segmento AB de extremos A( 321 a,a,a ) y B( 321 b,b,b ), se cumple que las coordenadas del punto medio M de dicho segmento son:
B M ⎟⎟⎠
⎞⎜⎜⎝
⎛ +++2
ba,
2ba
,2
ba 332211 ya que: AB21
AM = ⇒
M
A ⇒ M-A = 21
(B-A) ⇒ M = A+ A21
B21
− ⇒ M = 2
BA +
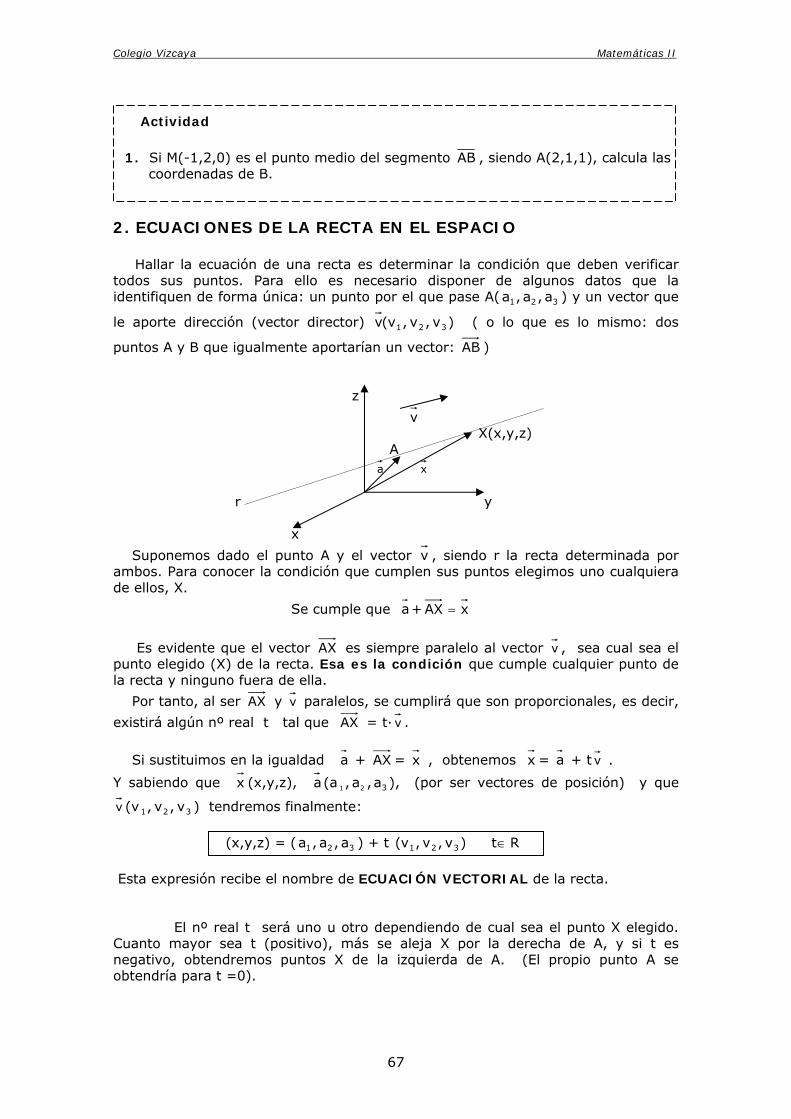
Colegio Vizcaya Matemáticas II
67
Actividad
1. Si M(-1,2,0) es el punto medio del segmento AB , siendo A(2,1,1), calcula las coordenadas de B.
2. ECUACIONES DE LA RECTA EN EL ESPACIO Hallar la ecuación de una recta es determinar la condición que deben verificar todos sus puntos. Para ello es necesario disponer de algunos datos que la identifiquen de forma única: un punto por el que pase A( 321 a,a,a ) y un vector que
le aporte dirección (vector director) )v,v,v(v 321 ( o lo que es lo mismo: dos
puntos A y B que igualmente aportarían un vector: AB ) z
v X(x,y,z) A a x r y x
Suponemos dado el punto A y el vector v , siendo r la recta determinada por ambos. Para conocer la condición que cumplen sus puntos elegimos uno cualquiera de ellos, X.
Se cumple que a+ xAX =
Es evidente que el vector AX es siempre paralelo al vector v , sea cual sea el punto elegido (X) de la recta. Esa es la condición que cumple cualquier punto de la recta y ninguno fuera de ella.
Por tanto, al ser AX y v paralelos, se cumplirá que son proporcionales, es decir,
existirá algún nº real t tal que AX = t· v .
Si sustituimos en la igualdad a + AX = x , obtenemos x = a + t v .
Y sabiendo que x (x,y,z), a (a 21 a, , 3a ), (por ser vectores de posición) y que
v (v 321 v,v, ) tendremos finalmente: (x,y,z) = ( 321 a,a,a ) + t )v,v,v( 321 t R∈ Esta expresión recibe el nombre de ECUACIÓN VECTORIAL de la recta. El nº real t será uno u otro dependiendo de cual sea el punto X elegido. Cuanto mayor sea t (positivo), más se aleja X por la derecha de A, y si t es negativo, obtendremos puntos X de la izquierda de A. (El propio punto A se obtendría para t =0).

Colegio Vizcaya Matemáticas II
68
Es lógico pensar que los infinitos valores de t posibles, dan lugar cada uno de ellos, a los infinitos puntos (x,y,z) de la recta. Si operamos la igualdad anterior y separamos por coordenadas tendremos
las ECUACIONES PARAMÉTRICAS de la recta: ⎪⎩
⎪⎨
⎧
+=
+=
+=
33
22
11
tvaz
tvay
tvax
t∈ R
Igualmente, si despejamos t en cada ecuación e igualamos los resultados obtenidos llegaremos a la ECUACIÓN CONTINUA de la recta:
3
3
2
2
1
1
vaz
vay
vax −
=−
=−
Toda recta puede venir dada también como la intersección de dos planos, es decir puede adoptar la forma:
⎩⎨⎧
=+++=+++
0Dz'Cy'Bx'A0DCzByAx
que se conoce con el nombre de ECUACIÓN IMPLÍCITA O CARTESIANA de la recta. Dicha ecuación se obtendría sin más que desarrollar por separado las dos igualdades de la ecuación continua. Ejemplo: Escribir en todas las formas posibles la ecuación de la recta que pasa por A(1,-1,2)
y tiene por vector director v (-2,1,3) Ecuación vectorial (x,y,z) = (1,-1,2) + t(-2,1,3) t∈R
Ecuaciones paramétricas ⎪⎩
⎪⎨
⎧
+=+−=
−=
t32zt1yt21x
t∈R
Ecuación continua 3
2z1
1y21x −
=+
=−−
Ecuación implícita ⎩⎨⎧
−=−−=+5zy31y2x
que se obtiene “multiplicando en cruz” las dos igualdades de la ecuación continua.

Colegio Vizcaya Matemáticas II
69
El paso de una forma a otra es sencillo en el caso de las formas vectorial, paramétrica y continua, pues el punto y el vector se encuentran visibles. También se ha indicado cómo pasar de la forma continua a la implícita. Para pasar de la forma implícita a las anteriores bastaría con resolver el sistema en función de una variable, lo que daría lugar a la ecuación paramétrica. Veamos un ejemplo: Ejemplo:
Dada la recta ⎩⎨⎧
=+−−=++
1z2yx0zy2x
sumando obtenemos: y+3z = 1 ⇒ y = 1–3z
z = z x = -2y-z ⇒ x = -2(1-3z)-z ⇒ x = -2+5z
es decir: ⎪⎩
⎪⎨
⎧
=−=+−=
zzz31yz52x o lo que es lo mismo:
⎪⎩
⎪⎨
⎧
=−=+−=
tzt31yt52x que es la ecuación
paramétrica, de donde se deduce que A(-2,1,0) es un punto de la recta y
v (5,-3,1) es su vector director. Si la recta viene determinada por dos puntos A y B, puede considerarse como
punto uno cualquiera de los dos, y como vector, el formado por ambos puntos: AB
o BA indistintamente. Actividades 2. Encuentra dos puntos y el vector director de las rectas:
a) 2z
13y
31x
=−−
=+
b) ⎪⎩
⎪⎨
⎧
−=−=+−=
t3zt3y
t52x c)
⎩⎨⎧
=+−=+
4zyx2zy
3. Halla la ecuación implícita de la recta que pasa por el punto A(1,0,0) y es
paralela a la recta r: 2z
13y
31x
=−−
=+
.
4. Halla la ecuación continua de la recta que pasa por el punto medio del
segmento formado por A(3,-1,4) y B(1,1,0) y es paralela a la recta
r: ⎩⎨⎧
=++=+−2zyx0zyx3

Colegio Vizcaya Matemáticas II
70
3. ECUACIONES DEL PLANO Hallar la ecuación de un plano es determinar la condición que deben verificar todos sus puntos. Para identificarlo, necesitamos conocer un punto A( 321 a,a,a ) y
dos vectores independientes )u,u,(u u 321 y )v,v,v(v 321 . z u X
A v a x y x Elegimos un punto cualquiera del plano X(x,y,z). Observamos que se cumple:
AXa + = x
Por ser AX un vector del plano, tiene que ser una combinación lineal de los
vectores u y v (sabemos que no puede haber tres vectores independientes en un
plano), y por tanto, AX = t·u + s· v siendo t y s números reales. Sustituyendo en la igualdad anterior:
a + t·u + s· v = x es decir, (x,y,z) = ( 321 a,a,a ) + t )u,u,(u 321 + s )v,v,v( 321 t, s ∈ R ECUACIÓN VECTORIAL del plano. Esta ecuación depende del punto y vectores que se hayan elegido y, por tanto, puede haber distintas ecuaciones vectoriales que correspondan al mismo plano. Si operamos la igualdad anterior obtenemos:
⎪⎩
⎪⎨
⎧
++=
++=
++=
333
222
111
svtuaz
svtuay
svtuax
t, s ∈ R ECUACIONES PARAMÉTRICAS
Dando valores a t y s obtendríamos todos los puntos del plano.
Ya hemos dicho que el vector AX tiene que ser linealmente dependiente de los
vectores u y v , es decir, rg(AX , u , v ) = 2 y por tanto debe cumplirse:
Colegio Vizcaya Matemáticas II
71
333
222
111
vuazvuayvuax
−−−
= 0 Resolviendo el determinante, obtenemos una
igualdad en x, y, z de la forma: Ax + By + Cz + D = 0 ECUACIÓN GENERAL O IMPLÍCITA Ejemplo: Ecuación del plano que pasa por el punto A(1,-1,2) y es paralelo a los vectores
u (1,0,-2) y v (3,-2,1). a) (x,y,z) = (1,-1,2) + t (1,0,-2) + s (3,-2,1) Ecuación vectorial
b) ⎪⎩
⎪⎨
⎧
+−=−−=++=
st22zs21y
s3t1x t, s ∈ R Ecuaciones paramétricas
c) 122z201y
311x
−−−+
− = 0 ⇒ -6y-6-2z+4-y-1-4x+4 = 0 ⇒ -4x -7y -2z +1 = 0
Ecuación general Para calcular los puntos de corte de un plano con los ejes basta tener en cuenta que: 1) Eje X : puntos de la forma (a,0,0) es decir, es necesario y=z=0 2) Eje Y: puntos de la forma (0,b,0) es decir, es necesario x=z=0 3) Eje Z: puntos de la forma (0,0,c) es decir, es necesario x=y=0 Actividades 5. Halla las ecuaciones paramétricas del plano :π x-2y+2z-3=0 6. Halla la ecuación general del plano determinado por los puntos: a) A(0,-1,3), B(4,1,2) y C(1,-1,0) b) A(1,0,0), B(0,3,0) y C(0,0,2)
7. Calcula la ecuación del plano que pasa por el punto A(-1,1,2) y contiene a la
recta r:⎩⎨⎧
=−=++
0zx3zyx
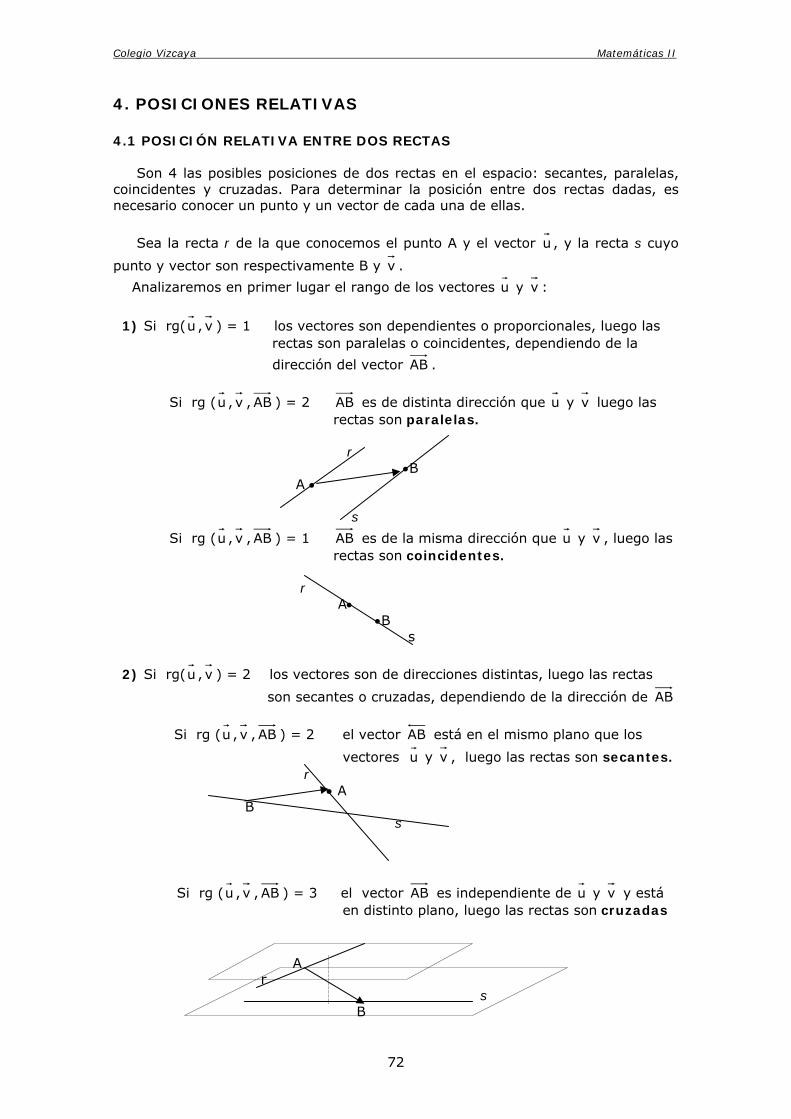
Colegio Vizcaya Matemáticas II
72
4. POSICIONES RELATIVAS 4.1 POSICIÓN RELATIVA ENTRE DOS RECTAS Son 4 las posibles posiciones de dos rectas en el espacio: secantes, paralelas, coincidentes y cruzadas. Para determinar la posición entre dos rectas dadas, es necesario conocer un punto y un vector de cada una de ellas.
Sea la recta r de la que conocemos el punto A y el vector u , y la recta s cuyo
punto y vector son respectivamente B y v .
Analizaremos en primer lugar el rango de los vectores u y v :
1) Si rg(u , v ) = 1 los vectores son dependientes o proporcionales, luego las rectas son paralelas o coincidentes, dependiendo de la
dirección del vector AB .
Si rg (u , v , AB ) = 2 AB es de distinta dirección que u y v luego las rectas son paralelas. r •B A • s
Si rg (u , v , AB ) = 1 AB es de la misma dirección que u y v , luego las rectas son coincidentes. r A• •B s
2) Si rg(u , v ) = 2 los vectores son de direcciones distintas, luego las rectas
son secantes o cruzadas, dependiendo de la dirección de AB
Si rg (u , v , AB ) = 2 el vector AB está en el mismo plano que los
vectores u y v , luego las rectas son secantes. r • A B s
Si rg (u , v , AB ) = 3 el vector AB es independiente de u y v y está en distinto plano, luego las rectas son cruzadas A r s B
Colegio Vizcaya Matemáticas II
73
Ejemplo: Determinar la posición relativa entre las rectas
r: z2y
31x
==−
y s: ⎪⎩
⎪⎨
⎧
+==
+=
t21zty
t2x
La recta r pasa por el punto A(1,0,0) y tiene por vector u (3,2,1)
La recta s pasa por el punto B(2,0,1) y tiene por vector v (1,1,2)
Hallamos rg (u , v )
rg (u , v ) = rg ⎟⎟⎠
⎞⎜⎜⎝
⎛211123
= 2 ya que 01123
≠
Hallamos ahora rg (u , v , AB )
rg (u , v , AB ) = rg ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
101211123
= 3 porque 0101211123
≠
Por tanto, las rectas son CRUZADAS Actividades 8. Halla las posiciones relativas de los tres pares de rectas que se pueden formar con:
a) 2
z1
1y2
1x−
=+
=−
b) 1
2z2y
13x +
==−
c) 2
3z12y
24x +
=−−
=−−
9. Halla el valor de a para el cual las rectas r y s se cortan, y calcula dicho punto
de corte. r: x = y = z-a s: 0
2z23y
31x2 −
=−+
=−
4.2 POSICIÓN RELATIVA RECTA-PLANO
Consideramos el plano π : Ax+By+Cz+D=0 y la recta r:⎩⎨⎧
=+++=+++
0''Dz''Cy''Bx''A0'Dz'Cy'Bx'A
Estudiar la posición relativa entre π y r equivale a analizar la compatibilidad del sistema que forman sus ecuaciones, pues es necesario conocer si existen o no puntos comunes.

Colegio Vizcaya Matemáticas II
74
Consideramos por tanto el sistema: ⎪⎩
⎪⎨
⎧
=+++=+++
=+++
0''Dz''Cy''Bx''A0DzCy'Bx'A
0DCzByAx
Sean las matrices M = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
''C''B''A'C'B'A
CBA y N =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
''D ''C''B''A'D'C'B'A
DCBA
Se establecen tres posibilidades: 1) rg(M)= rg(N)= 3 El sistema es compatible determinado según el teorema de Rouché. En ese caso existe un único punto común, luego la recta y el plano serán SECANTES en un punto. • 2) rg(M)= 2 y rg(N)= 3 El sistema es incompatible, no existen puntos comunes. Luego la recta es paralela al plano. 3) rg(M) = rg(N)= 2 El sistema es compatible indeterminado, es decir, recta y plano se cortan en infinitos puntos. Por tanto, la recta está contenida en el plano. Es evidente que no puede haber más posibilidades, pues el rg(M) no puede ser inferior a 2, ya que los dos planos que determinan la recta deben ser necesariamente independientes. Ejemplo:
Hallar la posición relativa entre la recta z2y
31x
==−
y el plano 3x-y+z=1.
Escribimos la recta en forma implícita ⎩⎨⎧
==−
z2yy32x2
⇒ ⎩⎨⎧
=−=−0z2y2y3x2
Estudiamos el rango de las matrices:
A = ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−
113210
032 y C =
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−
111302102032

Colegio Vizcaya Matemáticas II
75
Como |A| ≠ 0, rg(A)=3 y rg(C)=3 necesariamente, luego la recta es secante al plano. Si quisiéramos calcular el punto de corte, bastaría con resolver el sistema de 3 ecuaciones con 3 incógnitas que forman, por cualquiera de los métodos conocidos. Actividades
10. Halla la posición relativa entre el plano π : x–y+z–2=0 y la recta
r:3
2z1y
21x −
==−
11. Dada la recta r: ⎩⎨⎧
=+−−=++
0zy2x1zyx
determina el valor de a para que el plano
2x+y+az=b sea paralelo a r. Di para que valores de b la recta está contenida en el plano. 12. Halla la posición relativa de la recta r y el plano π según los valores de m.
r: ⎪⎩
⎪⎨⎧
=++=++
mmzyxmzymx 2
π : x + y + 2mz = 2
4.3 POSICIÓN RELATIVA ENTRE DOS PLANOS Consideramos los planos π : Ax+By+Cz+D=0 y π ’: A’x+B’y+C’z+D’=0 De nuevo, analizar su posición relativa es equivalente a estudiar la compatibilidad del sistema que forman.
Sean las matrices M = ⎟⎟⎠
⎞⎜⎜⎝
⎛'C'B'A
CBA Y N = ⎟⎟
⎠
⎞⎜⎜⎝
⎛−−
'D'C'B'ADCBA
Se establecen tres casos posibles: 1) rg(M)= rg(N) = 2 En este caso, el sistema es compatible indeterminado y habrá infinitas soluciones dependientes de un parámetro. Como los dos planos son independientes, serán planos secantes en una recta.
Colegio Vizcaya Matemáticas II
76
2) rg(M)=1 y rg(N)=2 El sistema es incompatible, luego no existen puntos comunes y se deduce que son planos paralelos. Si el rg(M) es 1, eso significa que sus filas son proporcionales, es decir, se
cumplirá que 'C
C'B
B'A
A== . Al incorporar la última columna, aumenta el rango,
luego se trata de una columna independiente que pierde la proporcionalidad, es decir:
Si los planos son paralelos se cumplirá 'D
D'C
C'B
B'A
A≠==
Esta condición nos permitirá reconocer el paralelismo entre dos planos mirando simplemente sus ecuaciones respectivas. 3) rg(M)= rg(N)=1 El sistema es compatible indeterminado y habrá infinitas soluciones dependientes de dos parámetros. Si el rango es 1, todos los coeficientes serán proporcionales, luego se trata de dos ecuaciones iguales, es decir, de dos planos coincidentes.
Si los planos son coincidentes se cumplirá 'D
D'C
C'B
B'A
A===
Se deduce entonces que siempre que no exista proporcionalidad entre los coeficientes, los planos serán secantes. Escribe un par de planos: a) paralelos b) secantes c) coincidentes Actividad 13. Dado el plano π : 2x-y+3z+1 = 0, halla la ecuación del plano paralelo a π que pasa por el punto A(1,0,2).
4.4 POSICIÓN RELATIVA DE TRES PLANOS Determinar la posición entre tres planos requiere estudiar la compatibilidad del sistema que forman. Consideramos los planos: α : Ax+By+Cz+D=0 β : A’x+B’y+C’z+D’=0 π : A’’x+B’’y+C’’z+D’’=0
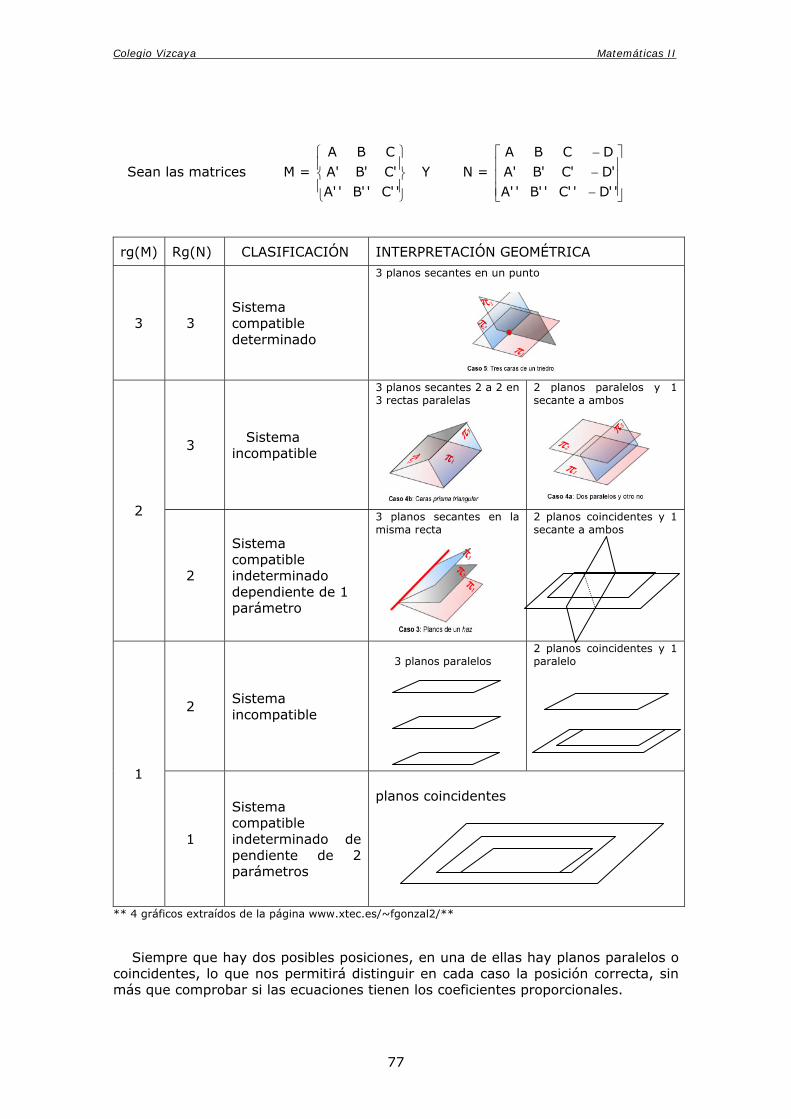
Colegio Vizcaya Matemáticas II
77
Sean las matrices M = ⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
''C''B''A'C'B'A
CBA Y N =
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−
''D''C''B''A'D'C'B'A
DCBA
rg(M) Rg(N) CLASIFICACIÓN INTERPRETACIÓN GEOMÉTRICA
3 3 Sistema compatible determinado
3 planos secantes en un punto
3 Sistema incompatible
3 planos secantes 2 a 2 en 3 rectas paralelas
2 planos paralelos y 1 secante a ambos
2
2
Sistema compatible indeterminado dependiente de 1 parámetro
3 planos secantes en la misma recta
2 planos coincidentes y 1 secante a ambos
2 Sistema incompatible
3 planos paralelos
2 planos coincidentes y 1 paralelo
1
1
Sistema compatible indeterminado de pendiente de 2 parámetros
planos coincidentes
** 4 gráficos extraídos de la página www.xtec.es/~fgonzal2/** Siempre que hay dos posibles posiciones, en una de ellas hay planos paralelos o coincidentes, lo que nos permitirá distinguir en cada caso la posición correcta, sin más que comprobar si las ecuaciones tienen los coeficientes proporcionales.

Colegio Vizcaya Matemáticas II
78
Actividades 14. Estudia la posición relativa de los siguientes tríos de planos:
a) ⎪⎩
⎪⎨
⎧
=+−π
=+−π
=++π
0z2yx2:
0zy2x:
1zyx:
3
2
1
b)⎪⎩
⎪⎨
⎧
−=−+−π
=−−π
=+−π
1z3yx:
1zyx:
4z6y4x2:
3
2
1
2
c) ⎪⎩
⎪⎨
⎧
=++−π
=+−π
=−+π
1zyx:
2zyx:
1zyx:
3
2
1
d) ⎪⎩
⎪⎨
⎧
−=−+−π
=−+π
=+−π
1z2yx2:
1zyx:
2z4y2x4:
3
2
1
e) ⎪⎩
⎪⎨
⎧
=−+π
=−+π
=+−π
3z4yx3:
2zy2x2:
1z2yx:
3
2
1
5 f)
⎪⎩
⎪⎨
⎧
=+−−π
=+−−π
−=−+π
1z2yx2:
2zyx:
6z3y3x3:
3
2
1
2
15. Estudia la posición relativa de los siguientes planos según los valores de m:
⎪⎩
⎪⎨
⎧
=++π
=++π
=++π
0mzymx:
0zmyx:
0mzyx:
3
2
1
¿Existe algún valor de m para el que los planos se corten en el punto (0,3,3)? 5. HACES DE PLANOS 5.1 HACES DE PLANOS PARALELOS Definición: Es el conjunto de todos los planos paralelos a uno dado. Si el plano dado es Ax+By+Cz+D=0, la ecuación del haz de planos paralelos es: Ax+By+Cz+k= 0 siendo k ∈R Ejemplo: El haz de planos paralelos al plano 3x-2y+z=5, tiene la forma: 3x-2y+z+k=0 k ∈R 5.2 HAZ DE PLANOS SECANTES A UNA RECTA DADA Definición: Es el conjunto de todos los planos que contienen a la misma recta r.

Colegio Vizcaya Matemáticas II
79
Si la recta r viene dada por r: ⎩⎨⎧
=+++=+++
0Dz'Cy'Bx'A0DCzByAx
, la ecuación del haz es:
α (Ax+By+Cz+D) + β (A’x+B’y+C’z+D’) =0 siendo ∈βα , R no simultáneamente nulos. ya que cualquier plano que contenga a r debe ser una combinación lineal de los dos planos dados, pues tiene que formar con ellos un sistema compatible indeterminado. Ejemplo:
El haz de planos secantes en la recta r: ⎩⎨⎧
−=−=−+
1zx5z3yx
es de la forma:
α (x+y-3z-5) + β (x-z+1) =0 Cada uno de los planos que pasan por la recta r, se obtendría fijando valores cualquiera de α y β , no simultáneamente nulos. Por ejemplo, si α=1 y β=2 , el plano sería: x+y-3z-5 + 2(x-z+1) = 0 ⇒ 3x+y-5z-3=0

Colegio Vizcaya Matemáticas II
80
ESPACIO AFÍN: EJERCICIOS, PROBLEMAS Y CUESTIONES
MATEMÁTICAS II
1. Dados los puntos A(1,0,2), B(7,-6,-4) y C(4,3,5): a) Comprueba que están alineados. b) Divide el segmento AB en tres partes iguales. 2. Calcula el valor de a para que el punto A(1,2,3) pertenezca a la recta
r: ⎩⎨⎧
=−++=−+
06zyax0zayx
3. Determina la ecuación del plano que contiene a los puntos A(-1,0,2) y B(3,4,0)
y es paralelo a la recta r:⎩⎨⎧
−=+−=−+
1zyx23zyx
4. Comprueba si los puntos A(1,2,0), B(3,4,1), C(-1,0,1) y D(2,1,0) son
coplanarios (se encuentran en el mismo plano).
5. Calcula los puntos de corte de la recta r:2z
11y
21x
=+
=−
con los planos
coordenados. 6. Halla la posición relativa de la recta r con cada una de las rectas siguientes:
r: ⎩⎨⎧
−=−+=+−
2z2yx4yx
a) s:⎩⎨⎧
=+−=−+
6z2yx4z2yx
b) t: ⎪⎩
⎪⎨
⎧
λ−=λ−=λ−=
22z2y
21x c) u:
33z
34y
3x −
=−
=
7. Halla a para que las rectas r y s estén en un mismo plano y halla la ecuación
de dicho plano:
r: ⎩⎨⎧
==+
1yazx2
s: ⎩⎨⎧
=+=++−
ayx5z2y2x
8. Estudia, según los valores de m, la posición relativa de los planos:
⎪⎩
⎪⎨
⎧
=−+−π
=−+−π
=−+−π
0mmzyx:
03mzmy2x:
01zy2mx:
3
2
1
4

Colegio Vizcaya Matemáticas II
81
9. ¿Para qué valor de a la recta r:⎩⎨⎧
=−+−=++
6z2y4x21zayx3
está contenida en el plano
2x + y + z = -1? 10. Un plano corta a los semiejes positivos de los ejes X, Y y Z en tres puntos A,
B y C que forman un triángulo equilátero. Además, se sabe que el plano pasa por el punto P(3,4,5). Halla dicho plano.
11. Dadas las rectas r y s de ecuaciones r:⎩⎨⎧
−=−=−
3zy2zx
s: ⎩⎨⎧
=−−=−
2zyx1z2x
calcula la ecuación de la recta que se apoya en r y s y pasa por el punto P(-1,2,1).
12. Halla los valores de m y n para que las rectas r y s sean paralelas:
r: ⎪⎩
⎪⎨
⎧
−=+=+=
tzt3yt45x s:
n3z
31y
mx +
=−
=
13. Halla los valores de m y n para que los planos: α : mx + y - 3z -1 = 0 β : 2x + ny – z – 3 = 0 sean paralelos. ¿Pueden ser coincidentes?
14. Comprueba que las rectas: r: 2zy2
1x−==
− y s:
⎩⎨⎧
=−=−
11y2x5z2x
son
paralelas y halla la ecuación del plano que las contiene.
15. Estudia la posición de la recta r: ⎩⎨⎧
==
2y3x
y el plano z = 1.
16. Halla la ecuación de la recta paralela a r: ⎩⎨⎧
=+=+
5z3y5z2x
que pase por el punto
de intersección de la recta s: 3
2z2
3y4
1x +=
+=
− con el plano x –y + z = 7.
PROBLEMAS DE SELECTIVIDAD
17. (JULIO 2006) Sea π el plano de ecuación 2x+3y+4z = a y r la recta que
contiene al punto P=(1,1,-1) y tiene como vector de dirección a v =(1,2,-2). ¿Existe algún valor de a para el cuál la recta esté contenida en el plano? Razonar la contestación en caso negativo. En caso afirmativo, encontrar el valor de a.

Colegio Vizcaya Matemáticas II
82
18. (JULIO 2006) Calcular la ecuación cartesiana de la recta cuya expresión
paramétrica es r = ⎪⎩
⎪⎨
⎧
α+=α+=α−=
22z1y
31x
¿Existe algún valor de v tal que el punto (v,v,v) pertenezca a la recta? Razonar la respuesta.
19. (JUNIO 2006) Calcular la ecuación paramétrica de la recta definida por
r = ⎩⎨⎧
=++=−−
2z3yx1zyx
¿Existe algún valor de v tal que el punto (v,v,v-1) pertenezca a la recta? Razonar la respuesta, calculando el valor de v en caso de que sea afirmativa.
20. (JULIO 2005) Encontrar las condiciones que deben satisfacer a y b para que el
punto Q = (2,a,b) esté en el mismo plano que los puntos A= (1,3,1), B=(1,0,-1) y C= (0,0,2)
21. (JULIO 2005) Se considera la recta de ecuación paramétrica
r = ⎪⎩
⎪⎨
⎧
−=+−=
+=
t42zt1yt31x
Hallar su ecuación como intersección de dos planos (ecuaciones cartesianas). ¿Existe algún valor de s tal que el punto (1,2s,s) pertenezca a la recta?
Razonar la respuesta tanto en caso afirmativo como negativo. 22. (JULIO 2004) Determinar las posiciones relativas de los planos 1π y 2π
dados por 1π = x+ay+z = a+2 y 2π = x+y+az = 3 según los valores de a.
23. (JULIO 2004) Encontrar la ecuación paramétrica de la recta dada por
r = ⎩⎨⎧
=+−=++
0z2yx0zyx3
¿Existe algún valor de s tal que el punto (-3,s,s) pertenezca a la recta? Razonar la respuesta tanto en caso afirmativo como negativo. 24. (JUNIO 2004) Sean A y B los puntos del espacio de coordenadas A=
(0,1,2), B= (1,2,3). Encontrar la ecuación paramétrica de la recta que pasa por dichos puntos.
¿Existen valores de r y s para los que el punto C= (3,r+s,r-s) pertenezca a la recta anterior? En caso afirmativo, calcular los valores de r y s. Razonar la contestación en caso negativo.
25. (JUNIO 2004) Sea r la recta que pasa por el punto P= (0,1,0) y que tiene a
v = (1,1,-1) como0 vector de dirección. Se considera también el plano de ecuación -x+2y+z+A = 0.
Estudiar la posición relativa de la recta y del plano en función de A.
Colegio Vizcaya Matemáticas II
83
26. (JULIO 2003) Explicar un procedimiento para determinar si los cuatro
puntos del espacio P1 = (x1 ,y 11 z, ), P 2222 z,y,x(= ), P 3333 z,y,x(= ) y P 4444 z,y,x(= ) pertenecen a un mismo plano.
Aplicar dicho procedimiento para decidir si los puntos A=(0,1,2), B=(0,2,3), C=(1,1,1) y D=(1,2,3) pertenecen o no a un mismo plano.
27. (JUNIO 2003) Dados tres puntos diferentes del espacio P1 = (x1 ,y 11 z, ),
P 2222 z,y,x(= ) y P 3333 z,y,x(= ) describir brevemente un procedimiento para determinar si están en una misma recta.
Sean A = (a,1,2), B = (0,2,3) y C = (0,3,4) ¿existe algún valor de a para el cuál los tres puntos estén alineados? Razonar la respuesta y, en su caso, hallar el valor de a.
28. (JUNIO 2003) Se consideran tres planos de ecuaciones
1π = 4x+2y-4z = 2, 2π = x-2y-z = 2, 3π = x+ay+z = b.
¿Existen valores de a y b para los cuales los tres planos se corten en una recta? En caso de que la respuesta sea negativa razonar la contestación. Si es positiva, calcular dichos valores.
29. (JUNIO 2002) Dada la recta r como r = ⎩⎨⎧
=+++=+++
0'Dz'Cy'Bx'A0DCzByAx
y un
punto P(a,b,c) exterior a la misma, describir el proceso para que un plano contenga a la recta r y al punto P.
¿Es único dicho plano? Razonar la respuesta.
30. (JULIO 2001) Sean las rectas: r: ⎩⎨⎧
−=−+−=++2zyx21zyx3
s: ⎩⎨⎧
=+−=++
0azx2z2y2x6
Estudiar si existe o no algún valor de a para el cual las rectas no se corten. En caso negativo razonar la respuesta y en caso afirmativo, calcular dicho valor de a.
CUESTIONES
1. ¿Sabrías argumentar por qué un taburete de tres patas nunca puede cojear y si
tiene cuatro sí? 2. Indica qué condiciones deben cumplir los coeficientes A, B, C y D para que el
plano de ecuación: Ax+By+Cz+D = 0 sea: a) paralelo al plano XZ b) paralelo al eje X c) paralelo a los ejes X e Y d) no sea paralelo a ningún eje de coordenadas.

Colegio Vizcaya Matemáticas II
84
3. ¿Qué posición relativa deben tener dos rectas para que determinen un plano? 4. Sean 1π y 2π dos planos paralelos y r 1 y r 2 dos rectas contenidas en 1π y 2π
respectivamente. ¿Podemos asegurar que 1 y r 2 son paralelas? 5. Demuestra que la ecuación del plano que corta a los ejes de coordenadas en los
puntos A(a,0,0), B(0,b,0) y C(0,0,c) puede escribirse así:
1cz
by
ax
=++
6. Explica cómo se obtienen las ecuaciones paramétricas de un plano del que se
conoce la ecuación general o implícita. Escribe un ejemplo.
Colegio Vizcaya Matemáticas II
85
UNIDAD DIDÁCTICA 5
ESPACIO EUCLÍDEO
2º BACHILLER
Colegio Vizcaya Matemáticas II
86
OBJETIVOS DIDÁCTICOS 1. Expresar correctamente el producto escalar, tanto a través de su definición como
de su expresión analítica. 2. Conocer el concepto y cálculo del módulo de un vector. 3. Manejar el concepto de ortogonalidad. 4. Comprender el significado del vector normal de un plano. 5. Interpretar el concepto de ángulo entre dos rectas, entre dos planos y entre
recta y plano. 6. Hallar proyecciones ortogonales de puntos y segmentos sobre rectas y planos. 7. Hallar puntos simétricos respecto a una recta o a un plano. CONCEPTOS 1. Producto escalar: definición, consecuencias, propiedades e interpretación
geométrica. 2. Expresión analítica del producto escalar. 3. Módulo de un vector. 4. Ángulo entre dos vectores y entre dos rectas. 5. Vector normal del plano. 6. Ángulo entre dos planos y entre una recta y un plano. 7. Proyecciones ortogonales. 8. Puntos simétricos.
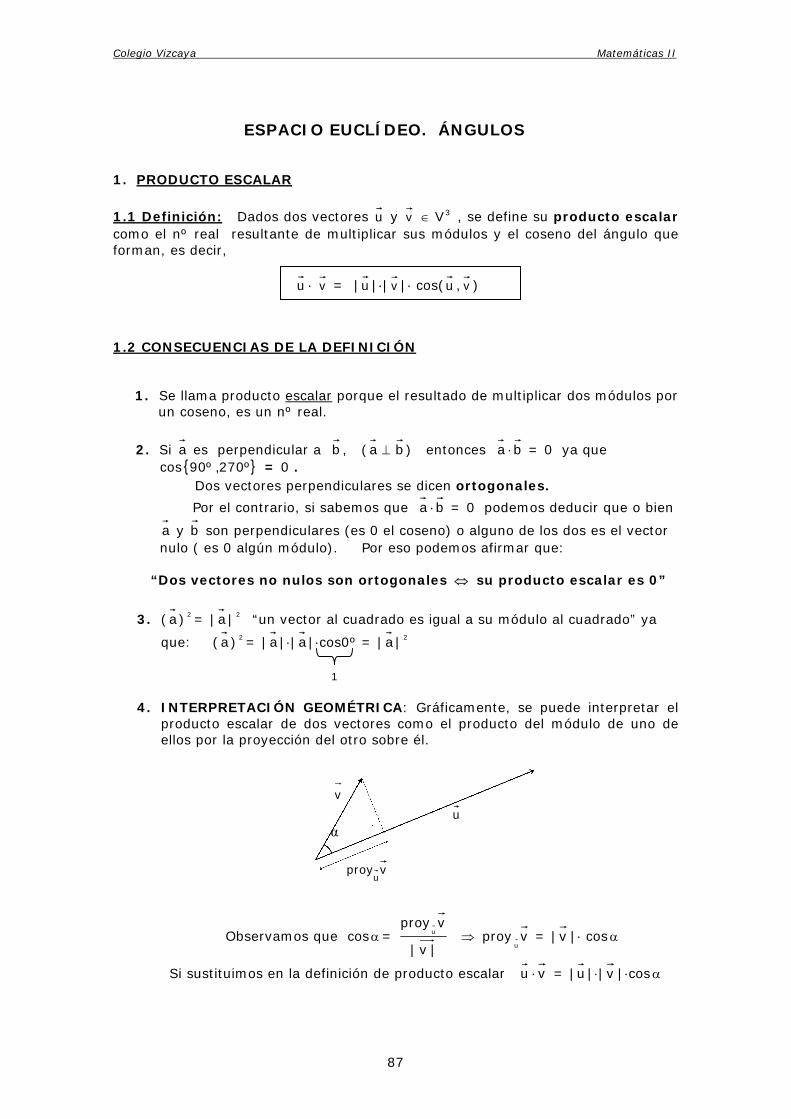
Colegio Vizcaya Matemáticas II
87
ESPACIO EUCLÍDEO. ÁNGULOS 1. PRODUCTO ESCALAR
1.1 Definición: Dados dos vectores u y v 3V∈ , se define su producto escalar como el nº real resultante de multiplicar sus módulos y el coseno del ángulo que forman, es decir, 1.2 CONSECUENCIAS DE LA DEFINICIÓN
1. Se llama producto escalar porque el resultado de multiplicar dos módulos por un coseno, es un nº real.
2. Si a es perpendicular a b , (a ⊥ b) entonces a ·b = 0 ya que cos{ }º270,º90 = 0 . Dos vectores perpendiculares se dicen ortogonales.
Por el contrario, si sabemos que a ·b = 0 podemos deducir que o bien
a y b son perpendiculares (es 0 el coseno) o alguno de los dos es el vector nulo ( es 0 algún módulo). Por eso podemos afirmar que: “Dos vectores no nulos son ortogonales ⇔ su producto escalar es 0”
3. (a) 2 = |a| 2 “un vector al cuadrado es igual a su módulo al cuadrado” ya
que: (a) 2 = |a|·|a|·cos0º = |a| 2 1
4. INTERPRETACIÓN GEOMÉTRICA: Gráficamente, se puede interpretar el
producto escalar de dos vectores como el producto del módulo de uno de ellos por la proyección del otro sobre él.
Observamos que cosα= |v|
vproyu ⇒ proy v
u = |v |· cosα
Si sustituimos en la definición de producto escalar u · v = |u |·| v |·cosα
u · v = |u |·| v |· cos(u , v )
v u α vproy
u

Colegio Vizcaya Matemáticas II
88
obtenemos: u · v = |u|· proy vu
que confirma lo que habíamos
afirmado en un principio. 1.3 PROPIEDADES
1. Conmutativa: a·b = b ·a ya que:
a ·b = |a|·|b |·cos(a,b )
b · a = |b |·|a|·cos(b ,a) como los módulos son números reales, cumplen la propiedad conmutativa y los ángulos, aunque son opuestos por tener sentidos contrarios, tienen el mismo coseno como ya sabemos por la reducción al primer cuadrante. ( cosb = cos(-b) )
Por eso podemos escribir genéricamente u · v = |u |·| v |· cosα
2. Asociativa mixta: (t· v )·u = t (u · v ) Rt ∈∀
3. Distributiva respecto a la suma: u( )wv + = u · v + u ·w La definición de producto escalar de dos vectores exige, para que pueda aplicarse, que se conozcan o puedan calcularse los módulos de ambos vectores y el ángulo que forman. Pero lo habitual es que los vectores vengan dados por sus componentes o coordenadas en una cierta base. Es por eso que se hace necesario encontrar otra manera de calcular el producto escalar de vectores a partir de sus componentes. 2. EXPRESIÓN ANALÍTICA DEL PRODUCTO ESCALAR
Sea B= { 321 u,u,u } una base ortonormal, es decir, una base formada por vectores unitarios y perpendiculares dos a dos:
| 1u |=| 2u |=| 3u |=1 y ji u · u =0 ji ≠∀
y sean a y b dos vectores cualesquiera de coordenadas respectivas ( 321 a,a,a ) y ( 321 b,b,b ) en dicha base B, entonces se cumple que:
a · b = 33 2211 b ·ab ·a b ·a ++ Demostración:
a · b = ( 332211 u ·au ·au ·a ++ ) · ( 332211 u ·bu ·bu ·b ++ ) =
( )332211
2333
2222
2111
23332323
131332322
222121231312121
2
111
bababa |u|ba |u|ba |u|ba )u(bauuba
uubauuba)u(bauubauubauubauba
++=++=++
+++++++=
0u · u ji = ji ≠∀ | 1u |=| 2u |=| 3u |=1

Colegio Vizcaya Matemáticas II
89
A partir de ahora, y si no se especifica otra cosa, se entiende que la base es la canónica B = {(1,0,0),(0,1,0),(0,0,1)} Ejemplo: (-1,2,4) · (3,-2,3) = (-1)·3 + 2·(-2) + 4·3 = 5 Actividades
1. Dados a=(2,0,s) y b=(s,-1,s), calcula el valor de s para que su producto escalar sea igual a 1.
2. Encuentra cuatro vectores ortogonales al vector u=(2,1,-1) que no sean proporcionales entre sí. 3. MÓDULO
Definición: Llamamos módulo del vector a al número real:
|a| = + 23
22
21 aaa ++
siendo ( 321 a,a,a ) las coordenadas del vector en una base ortonormal. Ejemplo:
a = (-1,5,-2) |a| = 222 )2(5)1( −++− = 30
Definición: Se llama espacio euclídeo al espacio afín en el que se ha definido un producto escalar. 4. VECTOR NORMAL DEL PLANO Definición: Llamamos vector normal del plano Ax+By+CZ+D=0, al vector
n(A,B,C) cuya dirección es perpendicular al plano.
n (A,B,C) • P • Q Ax+By+Cz+D=0
Para comprobar que n (A,B,C) es un vector perpendicular al plano, elegimos dos puntos cualesquiera de dicho plano, P( 321 a,a,a ) y Q( 321 b,b,b ). Por pertenecer al plano ambos puntos deben satisfacer su ecuación, por tanto:

Colegio Vizcaya Matemáticas II
90
Aa1 + Ba2 + Ca 3 + D = 0 Ab1 + Bb 2 + Cb 3 + D = 0 restando ambas igualdades obtenemos: A(a1 - b1 )+B(a 2 - b 2 )+ C(a 3 - b 3 )= 0 ⇒ (A,B,C)·(a 11 b − , 22 ba − , )ba 33 − = 0 ⇒
⇒ n · QP= 0 ⇒ n ⊥ QP
luego n es un vector perpendicular a QP , pues su producto escalar es 0, y como
QP es un vector cualquiera del plano al ser P y Q dos puntos genéricos, se deduce
que n es perpendicular a todas las direcciones del plano. Actividades
3. Halla la ecuación del plano perpendicular a la recta r: 2z
22y
11x
=−−
=−
, y que
contiene al punto P que es la intersección de la recta r y la recta s:
s: 1
2z1y
22x −
==−
.
4. Halla la ecuación del plano que es perpendicular al plano x+3y-z+1=0 y que pasa por los puntos A(-1,0,2) y B(1,1,-2). 5. ÁNGULOS ENTRE ELEMENTOS DEL ESPACIO 5.1. ÁNGULO ENTRE DOS VECTORES
De la definición de producto escalar se deduce: u · v = |u |· | v |· cosα ⇒
cosα = |v|·|u|
v · u =
23
22
21
23
22
21
332211
vvvuuu
vuvuvu
++++
++
siendo (u 321 u,u, ) y (v 321 v,v, ) las coordenadas respectivas de u y v en una base ortonormal. Ejemplo:
Hallar el ángulo comprendido entre los vectores =u (1,-1,0) y v = (0,-2,0)
cosα= |v|·|u|
v · u =
4 2
020 ++ =
22
2 =
2
1 =
22
⇒ α=45º

Colegio Vizcaya Matemáticas II
91
5.2 ÁNGULO ENTRE DOS RECTAS Definición: Llamamos ángulo entre dos rectas al menor de los ángulos que forman sus vectores directores.
v α
u β Entonces para calcular el ángulo entre dos rectas usaremos la fórmula:
cosα = |v|·|u|
|v · u| donde u y v son los vectores directores respectivos.
Ejemplo:
Hallar el ángulo formado por las rectas: 3
2z1
y2
1x +=
−=
− y
1z
11y
1x
−=
−+
=
cosα = |v|·|u|
|v · u| =
111 · 914
|3(-1)(-1)(-1)1 · 2|
++++
++ =
314
|0| = 0 ⇒ α= 90º
Luego las rectas son perpendiculares Actividades 5. Estudia la posición de las rectas r y s y calcula el ángulo que forman:
r: ⎩⎨⎧
=+=−
15zy3yx
s: ⎪⎩
⎪⎨
⎧
λ+−=λ+=
λ=
514z21y
3x
6. Considera las rectas r: 2
3z1y
2x +
=−= y s: 1
1z22y
22x +
=−−
=−
, calcula:
a) la ecuación del plano que las contiene b) el ángulo que forman
Se cumple que 0 ≤α≤ 90º Si las rectas son paralelas o coincidentes forman 0º.
Sabemos que cosα = |v|·|u|
v · u pero desconocemos si
estamos calculando el ángulo α o el ángulo β , pues no
está determinado el sentido de los vectores u y v . Como α y β son suplementarios, sus cosenos son opuestos y por tanto, es necesario añadir un valor absoluto a la fórmula, para asegurar el ángulo agudo α .

Colegio Vizcaya Matemáticas II
92
5.3 ÁNGULO ENTRE DOS PLANOS Definición: Se entiende por ángulo entre dos planos, el menor de los dos ángulos determinados por los semiplanos que forma la recta común. α Ax+By+Cz+D=0 α A’x+B’y+C’z+D’=0 Resulta evidente que el ángulo determinado por los dos planos es el mismo que el que forman sus respectivos vectores normales (que están girados 90º) Luego se cumple:
cosα = |'n|·|n|
|'n·n| =
222222 'C'BA' ·CBA
| C' · C B' · B A' · A|
++++
++
Si los planos son paralelos o coincidentes forman 0º. **El valor absoluto se hace necesario de nuevo, pues los vectores normales pueden tener uno u otro sentido dentro de la misma dirección y el ángulo formado entre ellos puede ser el suplementario de α , con lo que el coseno podría ser opuesto.** Ejemplo: Hallar el ángulo determinado por los planos y-z+6=0 y z=3.
Los respectivos vectores normales son: n= (0,1,-1) y 'n (0,0,1). Por tanto
cosα = |'n|·|n|
|'n·n| =
12
|)1(00| −++ =
2
1 =
22
⇒ α=45º
5.4 ÁNGULO ENTRE RECTA Y PLANO Definición: Se define el ángulo entre recta y plano como el ángulo α formado por la recta y su proyección sobre el plano. r α

Colegio Vizcaya Matemáticas II
93
Observamos en el dibujo que el ángulo α es el complementario al ángulo β que
forman el vector director de la recta (u ) y el vector normal del plano (n )
n
β u α Ax+By+Cz+D=0 Por tanto se cumple:
cosβ = senα = |n| · |u|
|n · u| =
23
22
21
222
321
uuu ·CBA
|u · Cu · Bu · A|
++++
++
Es evidente que si la recta es paralela al plano entonces n y u son perpendiculares
( n u ⊥ ) y, por el contrario, si la recta es perpendicular al plano n y u son paralelos. ** Observa que esta es la única fórmula en la que se calcula el seno del ángulo y no su coseno como en las anteriores** Ejemplo:
Halla el ángulo formado por la recta 2
2z4
1y2
x −=
+=
− y el plano x-2y-z+3=0
Deducimos que u= (-2,4,2) y n= (1,-2,-1), entonces:
senα = |n| · |u|
|n · u| =
141 ·4164
|)2()8(2|
++++
−+−+− =
6 · 24
12 =
1212
= 1 ⇒ α=90º
Observa que la recta y el plano son perpendiculares y que por tanto, n y u son proporcionales. Actividades
7. Dada la recta r: ⎩⎨⎧
=+=++
1zx2zyx
y el plano de ecuación x+y=3, determina el
ángulo que forman.
8. Halla el valor de a para que la recta a
2z0y
11x −
==+
forme un ángulo de 60º
con el plano coordenado XY.

Colegio Vizcaya Matemáticas II
94
6. PROYECCIONES ORTOGONALES Definición: Se llama proyección ortogonal del punto A sobre el plano π al punto de intersección (A’) del plano con la recta perpendicular a él por el punto A. •A •A’ (proyección ortogonal de A sobre π ) Definición: Se llama proyección ortogonal del punto A sobre la recta r al punto (A’) de intersección de la recta r con la recta perpendicular secante a ella por el punto A. • A’ (proyección ortogonal de A sobre r) •A Veamos el proceso que nos permitirá encontrar la proyección de un punto sobre un plano o una recta dada. Ejemplo 1: Proyección punto-plano Para proyectar el punto A(1,3,-1) sobre el plano π : x-y+z=0
1) Hallamos la recta r perpendicular a π por el punto A. r •A
n
r:⎪⎩
⎪⎨
⎧
+−=−=+=
t1zt3yt1x
t∈R
2) Calculamos el punto de corte entre r y π : A’ •A
•A’
1+t-(3-t)+(-1+t) = 0 ⇒ 3t–3=0 ⇒ t=1 luego ⎪⎩
⎪⎨
⎧
===
0z2y2x
Por tanto la proyección ortogonal de A sobre π es A’(2,2,0)
Para ello elegimos como vector de r el
vector normal de π : n (1,-1,1). La ecuación paramétrica de r sería:
Para ello resolvemos el sistema formado por r y π . Sustituimos las ecuaciones paramétricas de la recta en la ecuación del plano:

Colegio Vizcaya Matemáticas II
95
**Se advierte que la forma paramétrica de la recta es muy apropiada para encontrar el punto de intersección con un plano, aunque igualmente podría calcularse dicho punto si la recta estuviera dada en forma continua o implícita** Ejemplo 2: Proyección punto-recta
Para proyectar el punto A(2,1,0) sobre la recta r:⎪⎩
⎪⎨
⎧
+=−=+=
t1zty
t21x
1) Hallamos el plano π perpendicular a r por el punto A
r •A
n Como pasa por A se tendrá que cumplir: 4-1+D=0 ⇒ D=-3 Luego la ecuación del plano perpendicular es: π : 2x-y+z-3=0
2) Calculamos el punto de corte entre r y π : A’ •A r • A’ 2(1+2t) – (-t) + (1+t) – 3 = 0 ⇒
2+4t+t+1+t-3=0 ⇒ 6t=0 ⇒ t=0 ⇒ ⎪⎩
⎪⎨
⎧
===
1z0y1x
Por tanto la proyección ortogonal de A sobre r es A’(1,0,1) Actividad 9. Halla la proyección ortogonal del punto A(-1,1,2) sobre la recta r:
25z
1y2
1x−−
=−=−
.
El vector normal del plano será el director de la
recta u=(2,-1,1). Luego π será de la forma: 2x-y+z+D=0.
Para ello resolvemos el sistema formado por r y π . Sustituimos las ecuaciones paramétricas de la recta en la ecuación del plano:
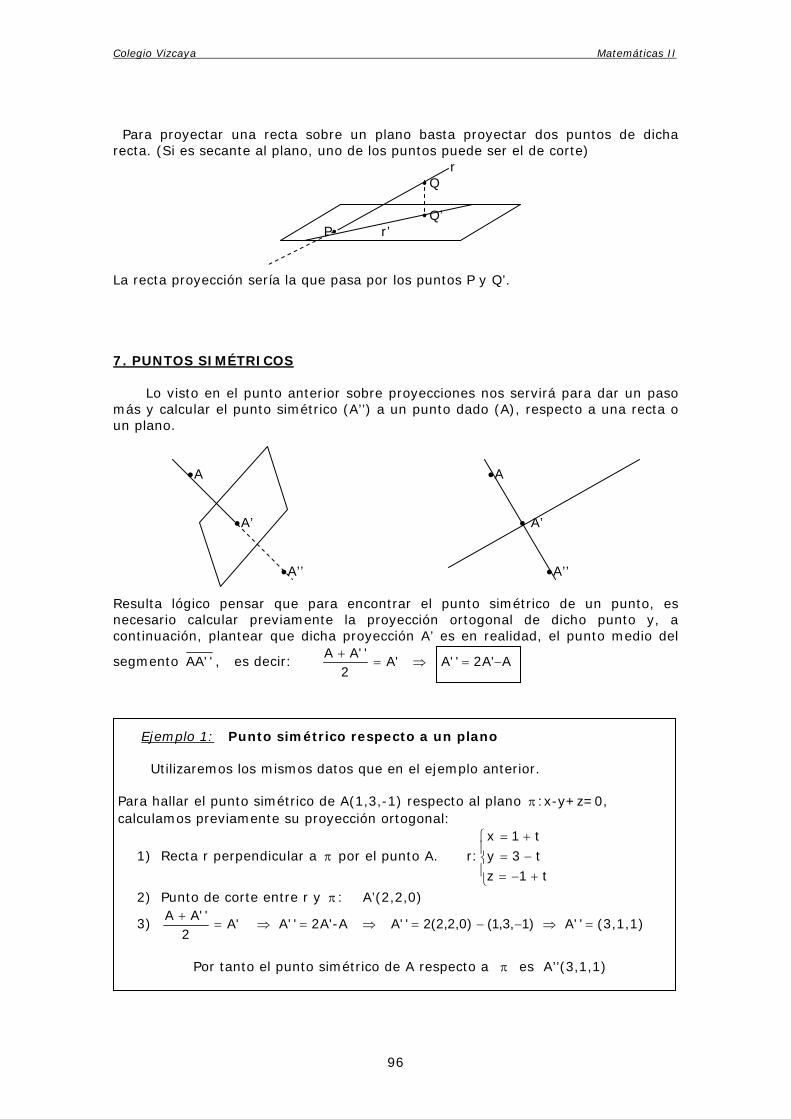
Colegio Vizcaya Matemáticas II
96
Para proyectar una recta sobre un plano basta proyectar dos puntos de dicha recta. (Si es secante al plano, uno de los puntos puede ser el de corte) r •Q •Q’ P• r’ La recta proyección sería la que pasa por los puntos P y Q’. 7. PUNTOS SIMÉTRICOS Lo visto en el punto anterior sobre proyecciones nos servirá para dar un paso más y calcular el punto simétrico (A’’) a un punto dado (A), respecto a una recta o un plano. •A •A •A’ • A’ •A’’ •A’’ Resulta lógico pensar que para encontrar el punto simétrico de un punto, es necesario calcular previamente la proyección ortogonal de dicho punto y, a continuación, plantear que dicha proyección A’ es en realidad, el punto medio del
segmento ''AA , es decir: 'A2
''AA=
+ ⇒ A'A2''A −=
Ejemplo 1: Punto simétrico respecto a un plano Utilizaremos los mismos datos que en el ejemplo anterior. Para hallar el punto simétrico de A(1,3,-1) respecto al plano π :x-y+z=0, calculamos previamente su proyección ortogonal:
1) Recta r perpendicular a π por el punto A. r:⎪⎩
⎪⎨
⎧
+−=−=+=
t1zt3yt1x
2) Punto de corte entre r y π : A’(2,2,0)
3) 2A'-A'A' 'A2
''AA=⇒=
+ ⇒ (3,1,1)'A' )1,3,1()0,2,2(2''A =⇒−−=
Por tanto el punto simétrico de A respecto a π es A’’(3,1,1)

Colegio Vizcaya Matemáticas II
97
Ejemplo 2: Punto simétrico respecto a una recta Utilizaremos los mismos datos que en el ejemplo anterior.
Para hallar el punto simétrico de A(2,1,0) respecto a la recta r:⎪⎩
⎪⎨
⎧
+=−=+=
t1zty
t21x
calculamos previamente su proyección ortogonal:
1) Hallamos el plano π perpendicular a r por el punto A. π : 2x-y+z-3=0 2) Calculamos el punto de corte entre r y π : A’(1,0,1)
3) 2A'-A'A' 'A2
''AA=⇒=
+ ⇒ )0,1,2()1,0,1(2''A −= (0,-1,2)'A' =⇒
Por tanto el punto simétrico de A respecto a r es A’’(0.-1,2) Actividades 10. Halla el punto simétrico de A(0,1,2) respecto al plano x-y+z+2=0.
11. Dado el punto A(2,0,-1) y la recta r: ⎩⎨⎧
=+−=+−
1yx0z2yx
calcula:
a) La proyección ortogonal del punto A sobre la recta r. b) La ecuación de la recta perpendicular a r, por el punto A. c) El punto simétrico de A respecto a la recta r.

Colegio Vizcaya Matemáticas II
98
ESPACIO EUCLÍDEO: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II 1. Halla la ecuación del plano perpendicular al plano 3x-y+2z=1, paralelo a la
recta 1
2z1y
22x −
==−
y que pasa por el punto A(-1,1,0).
2. Dadas las rectas r: 3
2z4
3y0
1x −=
+=
− y s:
25z
1y2
1x−−
=−=−
,
a) Determina su posición relativa b) Halla el ángulo que forman c) Calcula la ecuación del plano que contiene a r y es paralelo a s. 3. Halla la ecuación del plano que es perpendicular a la recta que pasa por los
puntos A(0,-1,1) y B(2,1,3), y que pasa por el punto P(0,0,1).
4. Halla la ecuación del plano que contiene a la recta r: ⎩⎨⎧
=+−=++
0zyx21zyx
y es
perpendicular al plano 2x+y+z-1=0.
5. Halla la recta que corta perpendicularmente a las rectas r: ⎩⎨⎧
=++=+0y2x
4zyx y
s: ⎩⎨⎧
=+=−
03y02x
.
6. Halla la ecuación de una recta que pase por el punto A(0,2,0) y corte
perpendicularmente a la recta r: ⎩⎨⎧
=+−=++
0zyx21zyx
.
7. Halla el valor de a para que la recta que pasa por los puntos A(1,2,0) y
B(2,0,-1) sea paralela al plano x+ay-z=1. 8. Dado el punto A(0,-1,3) y el plano π : 3x-y+2z=7 calcula:
a) La proyección ortogonal del punto A sobre el plano π . b) La ecuación de la recta perpendicular a π que pasa por A. c) El punto simétrico de A respecto al plano π .
9. Dada la recta r: 1z3
01y
22x
−−
=+
=−
, halla la ecuación de la recta simétrica de
r respecto al plano x-y=1.
Colegio Vizcaya Matemáticas II
99
10. Los puntos P(-1,1,4) y Q(1,-3,0) son simétricos respecto a un plano. Hallar
la ecuación de dicho plano.
PROBLEMAS DE SELECTIVIDAD 11. (JULIO 2007) Sea π el plano de de ecuación x + y + z = 1, y sea el punto P(1,-1,0). Hallar el simétrico de P respecto a π , explicando el proceso seguido para dicho cálculo. 12. (JUNIO 2005) Para cada valor de a, los puntos P(1,2,3) y A(0,1,a) son
simétricos respecto a un plano. Hallar la ecuación de dicho plano. En particular, encuentra el plano para a=2. 13. (JUNIO 2005) Sea r la recta que contiene al punto P(1,-1,2) y que es
perpendicular al plano de ecuación 3x-2y+z+50=0. a. Encontrar la ecuación paramétrica de r. b. Hallar, de forma razonada, la ecuación de un plano que contenga al
punto Q(0,0,0) y que no tenga puntos comunes con r. ¿Es único dicho plano?
14. (JULIO 2002) Sea π un plano de ecuación π : Ax+By+Cz+D=0 y sea P un
punto exterior al mismo dado por P(a,b,c). Describir el proceso para calcular el punto simétrico de P respecto a π .
15. (JULIO 2001) Dada una recta de la forma r: ⎩⎨⎧
=+++=+++
0'Dz'Cy'Bx'A0DCzByAx
y un
punto P(a,b,c) exterior a la misma, describir el proceso para calcular el punto simétrico de P respecto a r.
16. (JUNIO 2001) Se considera el punto P de coordenadas P(1,2,a) donde se
supone a ≠ 0, y el plano π : x+y+2z-3=0. a. Hallar las coordenadas del punto simétrico de P respecto al plano π .
17. (JULIO 2000) Se considera la recta r:⎩⎨⎧
=++−=
1zx22zyx
y el plano de ecuación
ax+y+z=a-1. Determinar si existe algún valor de a para el cual el plano contenga a la recta. Si existe, hallar dicho valor. En caso contrario, explicar por qué no existe.
Colegio Vizcaya Matemáticas II
100
18. (JUNIO 2000) Se consideran las rectas r: ⎩⎨⎧
=+−=−+
1zy3x20z2yx
y s: ⎪⎩
⎪⎨
⎧
+=−=
=
t2zt21y
t3x
Encontrar la ecuación del plano que contiene a la recta r y al punto de intersección de s con el plano π : x-3y-2z+7=0.
CUESTIONES
19. Dados los planos 1π y 2π de vectores directores (normales) 1v y 2v , encuentra la relación que deben tener dichos vectores para que los planos sean:
a) Paralelos b) Perpendiculares 20. Dada una recta r y un punto P contenido en ella, ¿cuántas rectas
perpendiculares a r por el punto P se pueden trazar?
21. Escribe la condición que debe verificar el vector v (a,b,c) para que tenga la dirección de alguna de las rectas contenidas en el plano x+5y-2z=-1.
22. Sea r la recta cuyo vector de dirección es v (a,b,c). ¿Es posible encontrar un plano cuyo vector normal sea paralelo al vector de dirección de r y que no contenga puntos de r?
23. ¿Cómo se podría verificar si 5 puntos dados pertenecen a un mismo plano?
Colegio Vizcaya Matemáticas II
101
UNIDAD DIDÁCTICA 6
ESPACIO MÉTRICO
2º BACHILLER
Colegio Vizcaya Matemáticas II
102
OBJETIVOS DIDÁCTICOS 1. Determinar el producto vectorial de dos vectores. 2. Interpretar geométricamente el módulo del producto vectorial entre dos
vectores. 3. Determinar el producto mixto de tres vectores.
4. Interpretar geométricamente el valor absoluto del producto mixto de tres
vectores. 5. Comprender el concepto de distancia. 6. Hallar las distancias entre los distintos elementos del espacio afín:
puntos,rectas y planos. 7. Hallar la perpendicular común a dos rectas.
CONCEPTOS 1. Producto vectorial: definición, propiedades e interpretación geométrica del
módulo. 2. Producto mixto: definición, propiedades e interpretación geométrica del valor
absoluto. 3. Distancia entre dos puntos. Espacio métrico. 4. Distancia punto-recta y punto-plano. 5. Distancia entre recta y plano. 6. Distancia entre dos rectas paralelas y 2 rectas que se cruzan. 7. Distancia entre dos planos. 8. Perpendicular común a dos rectas que se cruzan.

Colegio Vizcaya Matemáticas II
103
ESPACIO MÉTRICO. DISTANCIAS. 1. PRODUCTO VECTORIAL
1.1 Definición: Dados dos vectores libres )a,a,a(a 321= y )b,b,b(b 321= , se
define su producto vectorial, y se escribe ba ∧ , como el vector de la forma:
ba ∧ = ⎟⎟⎠
⎞⎜⎜⎝
⎛
21
21
13
13
32
32
bbaa
,bbaa
,bbaa
Simbólicamente, dicho vector puede expresarse como el resultado del “determinante”:
321
321
bbbaaak ji
siendo { i , j ,k } los vectores de la base canónica de V 3 :
⎪⎪⎩
⎪⎪⎨
⎧
=
=
=
)1,0,0(k
)0,1,0( j
)0,0,1( i
ya que desarrollando por la fila 1 resulta:
321
321
bbbaaak j i
= i · bbaa
32
32 - j·bbaa
31
31 + k·bbaa
21
21 = ⎟⎟⎠
⎞⎜⎜⎝
⎛
21
21
13
13
32
32
bbaa
,bbaa
,bbaa
propiedades de los determinantes: al intercambiar dos líneas, cambia el signo Ejemplo:
Dados los vectores a = (1,-2,0) y b = (3,1,-2), su producto vectorial es:
(1,-2,0)∧ (3,1,-2)= 213
021k ji
−− = 4 i + k + 6k + 2 j = 4 i + 2 j + 7k = (4,2,7)
1.2. Características del vector resultante
1) el MÓDULO de ba ∧ es igual al producto de los módulos de ambos vectores, por el seno del ángulo que forman, es decir:
| ba ∧ | = |a|· |b |· sen α Demostración: Demostraremos que se cumple la igualdad entre los cuadrados respectivos, pues al ser positivos ambos miembros (módulos y seno de ángulo entre 0 y π ), si son iguales al cuadrado, son iguales entre sí. (De esa forma evitaremos manejar raíces cuadradas)

Colegio Vizcaya Matemáticas II
104
| ba ∧ | 2 = | 2|a · | 2|b · sen 2 α Desarrollaremos ambos miembros por separado y obtendremos expresiones iguales.
| ba ∧ | 2 = 2
32
32
bbaa
+2
13
13
bbaa
+2
21
21
bbaa
=
= ( 2332 baba − ) 2 +( 3113 baba − )2+( 1221 baba − ) 2
Por otra parte sabemos que:
| |a 2 ·| 2|b · sen α2 = | |a 2 · | 2|b (1 - cos α2 ) = | |a 2 · | 2|b - | |a 2 ·| 2|b · cos α2 =
=| |a 2 · | 2|b - ( b · a ) 2 = ( 23
22
21 aaa ++ )+( 2
322
21 bbb ++ ) - (a 11 b · + 3322 b · ab · a + ) 2 =
= a 2
321
22
21
21
21 b ab ab ++ + a 2
322
22
22
21
22 b ab ab ++ + a 2
323
22
23
21
23 b ab ab ++ - 2
121 b a - 2
222 b a -
° ^ ° * ^ * - 2
323 b a - 2 2121 bbaa - 2 3131 bbaa - 2 3232 bbaa =
° ° ^ * = ( 2
322 b a + 2
323 b a -2 3232 bbaa )+( 2
321 b a +a 2
123 b -2 3131 bbaa )+(a 2
221 b +a 2
122 b -2 2121 bbaa ) =
* * * ^ ^ ^ ° ° ° = ( 2332 baba − ) 2 + ( 3113 baba − )
2 + ( 1221 baba − ) 2
* ^ °
De donde se deduce que | ba ∧ | 2 = | 2|a · | 2|b · sen 2 α y, por tanto,
| ba ∧ | = |a|· |b |· sen α c.q.d.
2) La DIRECCIÓN del vector ba ∧ es perpendicular a la de los vectores a y b . Demostración
ba ∧ es perpendicular a a si a · ( ba ∧ ) = 0
a · ( ba ∧ ) = a1 · 32
32
bbaa
+ a 2 · 13
13
bbaa
+ a 3 · 21
21
bbaa
=
= a1 ( 2332 baba − ) + a 2 ( 3113 baba − ) + a 3 ( 1221 baba − ) = = 123213312132231321 baabaabaabaabaabaa −+−+− = 0 c.q.d. se simplifican dos a dos todos los sumandos
Demuestra análogamente que ba ∧ también es perpendicular a b
3) El SENTIDO del vector ba ∧ es el del “sacacorchos” al girar desde a hasta b por el camino más corto. (El sentido es positivo si es contrario al de las agujas del reloj y negativo si es a favor)
Colegio Vizcaya Matemáticas II
105
1.3 PROPIEDADES
1) Anticonmutativa: Se cumple que ba ∧ = - ( ab ∧ ) Demostración
ba ∧ =
321
321
bbbaaakji
= -
321
321
aaabbbkji
= - ( ab ∧ ) c.q.d.
propiedades de los determinantes
2) Distributiva respecto a la suma: Se cumple que caba)cb(a ∧+∧=+∧ Demostración
)cb(a +∧ =
332211
321
cbcbcbaaak j i
+++ =
321
321
bbbaaak j i
+
321
321
cccaaak j i
= caba ∧+∧
propiedades de los determinantes c.q.d.
3) (ta ) b∧ = t ( ba ∧ ) = ∧a (tb ) siendo t ∈R Demostración
(ta) b∧ =
321
321
bbbtatatakji
= t·
321
321
bbbaaakji
=
321
321
tbtbtbaaakji
propiedades de los determinantes Actividades 1. (JULIO 2003) Se sabe que la recta r corta perpendicularmente al plano π y que el punto (3,4,0) pertenece a la recta r.
Se sabe además, que el vector 1v = (0,1,1) tiene como extremo y origen
dos puntos del plano π y lo mismo ocurre con el vector 2v (1,0,1). Calcular la ecuación de la recta r.
¿Son suficientes los datos anteriores para hallar la ecuación del plano π? Razonar la respuesta.

Colegio Vizcaya Matemáticas II
106
2. INTERPRETACIÓN GEOMÉTRICA DEL MÓDULO
Hemos demostrado que | ba ∧ |=|a|·|b |· sen α
a h α
b
| ba ∧ |=|a|·|b |· sen α = |b |· h = base · altura del paralelogramo formado
por a y b = ÁREA DEL PARALELOGRAMO. El módulo del vector resultante del producto vectorial de dos vectores mide el área del paralelogramo determinado por dichos vectores. A partir de esta conclusión podemos calcular también el área de cualquier triángulo conociendo sus vértices, ya que: C A B Ejemplo: Hallar el área del triángulo de vértices A(-1,1,0), B(2,1,-3) y C(-2,0,0).
Área = |ACAB|21
∧ = 011303
k j i
21
−−− = | i3 j3k3|
21
−+− =
= 99921
++ = 2721
= 323
u 2
Actividades 2. Calcula el área del triángulo cuyos vértices son los puntos en los que el plano . x- y+2z-4=0 corta a los ejes de coordenadas.
3. Sean los puntos P(-2,1,3) y Q(0,-1,7). Por el punto medio del segmento PQ trazamos un plano π perpendicular a dicho segmento. Este plano corta a los ejes coordenados en los puntos A,B y C.
a) Escribe la ecuación de π b) Calcula el área del triángulo ABC.
Se observa que senα = |a|
h ⇒ h = |a|· senα
y sustituyendo en la igualdad anterior se obtiene:
Área de ∆
ABC = |ACAB|21
∧ pues es la mitad
del área del paralelogramo que forman AB y
AC .

Colegio Vizcaya Matemáticas II
107
3. PRODUCTO MIXTO
3.1 Definición: Se define el producto mixto de tres vectores c y b ,a
pertenecientes a V 3 , como el producto escalar del primero por el producto vectorial
de los otros dos. Se escribe [ c ,b ,a ].
[ c ,b ,a ] = )cb( · a ∧ 3.2 Expresión analítica:
Siendo )a,a,a(a 321= , )b,b,b(b 321= y )c,c,c(c 321= se cumple:
[ c ,b ,a ] = 21
213
13
132
32
321 cc
bb · a
ccbb
· accbb
· a ++ =
321
321
321
cccbbbaaa
desarrollando por la fila 1 Ejemplo:
Si a= (1,-1,2), b= (0,1,3) y c = (-2,0,1) se cumple:
[ c ,b ,a ] = =−
−
102310211
1+6+4 = 11
3.3 PROPIEDADES
1. [ c ,b ,a ] = 0 ⇔ c y b ,a son linealmente dependientes.
2. [ c ,b ,'aa + ] = [ c ,b ,a ] + [ c ,b ,'a ]
3. [ c ,b ,at ] = t [ c ,b ,a ] Intenta demostrar que son ciertas utilizando las propiedades de los determinantes. 3.4 INTERPRETACIÓN GEOMÉTRICA DEL VALOR ABSOLUTO
Sean tres vectores libres c y b ,a y dibujamos el paralelepípedo que determinan si se aplican en el mismo punto: a c b

Colegio Vizcaya Matemáticas II
108
Sabemos que [ c ,b ,a ] = )cb( · a ∧ = | |a ·| |cb ∧ · cosα , siendo α el ángulo
formado por los vectores a y cb ∧ . a h cb ∧ α c b
Observamos en el dibujo que cosα=|a|
h ⇒ h = | |a · cosα y sustituyendo en
la expresión anterior obtenemos:
[ c ,b ,a ]= )cb( · a ∧ = | |a ·| |cb ∧ · cosα = | |cb ∧ ·h = VOLUMEN del paralelepípedo Área de la base Altura del paralelepípedo Sabemos, por las propiedades de los determinantes, que cambiar el orden de los vectores altera el signo del producto mixto. Cuando se trata de calcular un volumen, y teniendo en cuenta que el orden en que se operan los vectores es arbitrario, en necesario añadir un valor absoluto, es decir: El valor absoluto del producto mixto de tres vectores mide el volumen del paralelepípedo determinado por dichos vectores. Dado que el paralelepípedo se puede descomponer en 6 tetraedros, se deduce que el volumen de un tetraedro es: A
Volumen del tetraedro = AD,AC,AB[|61
]|
D
B
C Ejemplo:
Hallar el volumen del tetraedro determinado por los vectores a=(-1,0,2),
b=(2,3,-1) y c =(0,-2,4).
Volumen = c,b,a[|61
]| = 420132
201
61
−−
− = |2812|
61
+−− = |18|61
− = 3 u 3

Colegio Vizcaya Matemáticas II
109
Actividad 4. Halla el volumen del tetraedro que determina el plano -x+3y-2z+6=0 al cortar a los ejes coordenados. 4. DISTANCIAS 4.1 DISTANCIA ENTRE DOS PUNTOS Definición: Dados dos puntos del espacio )a,a,a(A 321= y )b,b,b(B 321= , llamamos distancia euclídea entre A y B al módulo del vector que forman:
d(A,B) = | |AB = 233
222
211 )ab()ab()ab( −+−+−
Ejemplo: Calcular la distancia entre los puntos A=(1,2,3) y B=(-1,3,3)
d(A,B) = | |AB = |(-2,1,0)| = 14 + = 5 u. 4.2 DISTANCIA PUNTO-RECTA Definición: Se define la distancia de un punto a una recta, como la distancia entre el punto y su proyección ortogonal sobre la recta. Veamos una estrategia que nos permitirá calcular dicha distancia sin necesidad de hallar la proyección ortogonal. Supongamos conocida la recta r de la que obtenemos un punto A y su vector
director u . Queremos calcular la distancia del punto P a dicha recta.
u d A • P Igualando ambas expresiones resulta:
2
d · |u| = |APu|
21
∧ ⇒ |u | · d = | |APu ∧ ⇒ d = |u|
|APu| ∧
Podemos entonces asegurar que:
Observamos en la figura que la distancia d es la altura del triángulo formado por los vectores
AP y u . El área del triángulo se puede calcular de dos formas distintas:
Área = 2
d · |u| y Área = |APu|
21
∧

Colegio Vizcaya Matemáticas II
110
d(P, r) = |u|
|APu| ∧
siendo respectivamente A y u un punto y el vector director de la recta. Ejemplo:
Hallar la distancia del punto A(-1,2,0) a la recta r : 1
z1
1y2
3x−
=+
=−
Obtenemos de la recta el punto B=(3,-1,0) y el vector u=(2,1,-1)
Sabemos que d(A, r) = |u|
|ABu| ∧ =
114
034112
k j i
++
−−
= 6
|i3k4j4k6| −−−− =
= 6
|)10 ,4 ,3(| −−− =
6
100169 ++ =
6125
u.
Actividades
5. Halla la distancia del punto A(-1,1,0) a la recta r: 2z
12y
31x
=−−
=+
6. Calcula, en función de a, la distancia del punto B(-4,0,a) al eje Z. 4.3 DISTANCIA PUNTO-PLANO Definición: Se define la distancia de un punto a un plano, como la distancia entre el punto y su proyección ortogonal sobre el plano. Veamos de nuevo cómo evitar el cálculo de la proyección ortogonal del punto. •P(p 321 p,p, )
)C,B,A(n α d α A(a,b,c)
Consideramos el plano Ax+By+Cz+D=0 y un punto A(a,b,c) cualquiera del plano. Queremos hallar la distancia d del punto P(p 321 p,p, ) a dicho plano. Para ello, realizamos el producto
escalar del vector normal )C,B,A(n del plano y el vector formado por los dos
puntos .AP

Colegio Vizcaya Matemáticas II
111
Sabemos que α= cos · |AP| · |n| AP · n y también se cumple: cosα= |AP|
d ⇒
⇒ d = | |AP · cosα y sustituyendo en la igualdad anterior obtenemos:
d · |n| AP · n = ⇒ d = |n|
|AP · n|
Incluimos un valor absoluto en el numerador para que la distancia sea positiva sin tener en cuenta el sentido de los vectores. Si desarrollamos analíticamente la igualdad:
d =|n|
|AP · n|=
222
321
CBA
|)cp ,bp ,a(p · )C,B,A(|
++
−−−=
222
321
CBA
|)cp(C)bp(B)ap(A|
++
−+−+−=
=222
321
CBA
|)CcBbAa(CpBpAp|
++
++−++ =
222
321
CBA
|)D(CpBpAp|
++
−−++
Por ser A un punto del plano, debe satisfacer su ecuación, es decir: Aa+Bb+Cc+D=0 ⇒ Aa+Bb+Cc =-D
Por tanto: d = 222
321
CBA
|DCpBpAp|
++
+++
Luego para calcular la distancia de un punto a un plano, basta con sustituir el punto en la ecuación del plano (en valor absoluto) y dividir entre el módulo del vector normal. Ejemplo: Calcula la distancia del punto A(-1,0,5) al plano :π -x+3y+2z-1=0
d(A, π ) = .u 7145
141410
14
|10|
23)1(
|1- 5 · 2 0 · 3)1(|222
===++−
++−−
Actividad 7. Calcula la distancia del origen al plano determinado por las rectas
r: ⎪⎩
⎪⎨
⎧
=−=+=
tzt2yt1x
y s: ⎩⎨⎧
=−=+−
0zx01yx
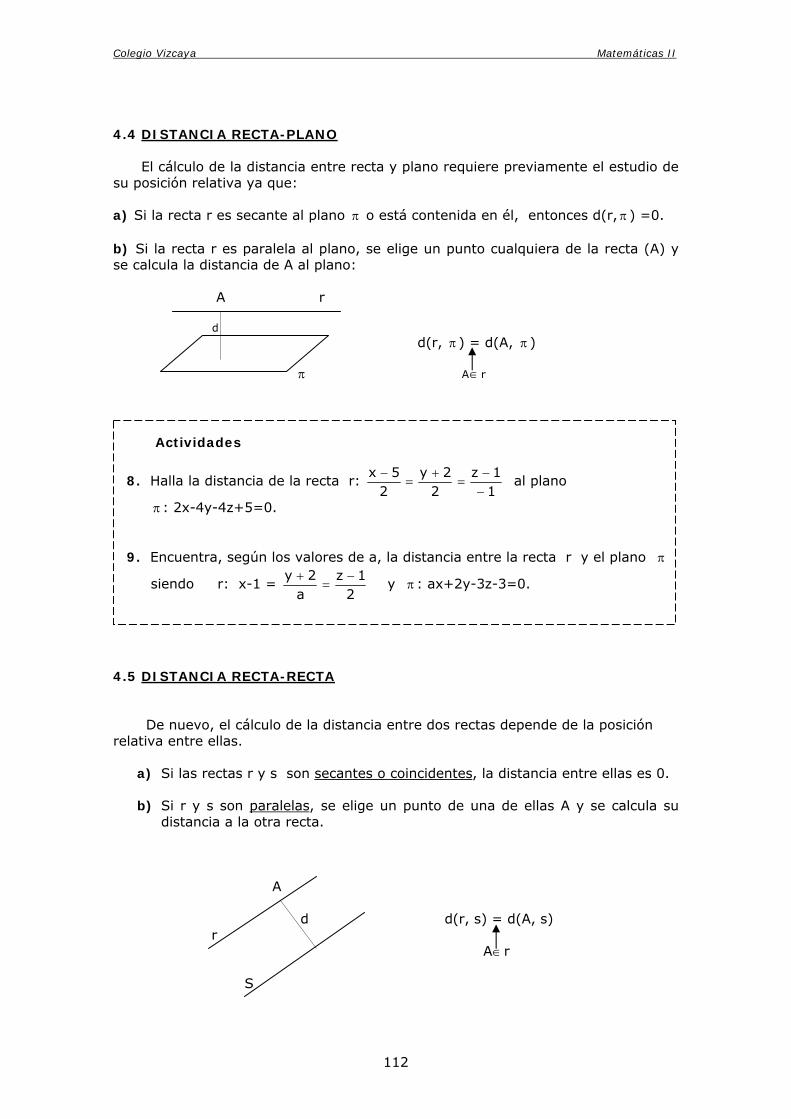
Colegio Vizcaya Matemáticas II
112
4.4 DISTANCIA RECTA-PLANO El cálculo de la distancia entre recta y plano requiere previamente el estudio de su posición relativa ya que: a) Si la recta r es secante al plano π o está contenida en él, entonces d(r, π ) =0. b) Si la recta r es paralela al plano, se elige un punto cualquiera de la recta (A) y se calcula la distancia de A al plano: A r
d d(r, π ) = d(A, π ) π A∈ r Actividades
8. Halla la distancia de la recta r: 11z
22y
25x
−−
=+
=−
al plano
π : 2x-4y-4z+5=0. 9. Encuentra, según los valores de a, la distancia entre la recta r y el plano π
siendo r: x-1 = 2
1za
2y −=
+ y π : ax+2y-3z-3=0.
4.5 DISTANCIA RECTA-RECTA De nuevo, el cálculo de la distancia entre dos rectas depende de la posición relativa entre ellas.
a) Si las rectas r y s son secantes o coincidentes, la distancia entre ellas es 0. b) Si r y s son paralelas, se elige un punto de una de ellas A y se calcula su
distancia a la otra recta. A d d(r, s) = d(A, s) r
A∈r S

Colegio Vizcaya Matemáticas II
113
c) Si r y s son rectas cruzadas, la distancia entre ellas coincide con la altura del paralelepípedo que determinan sus vectores respectivos.
Sean las rectas r y s de las que conocemos un punto y un vector:
r
u A d
B v s Sabemos que el volumen del paralelepípedo se calcula multiplicando el área de la base por la altura (d), es decir:
Volumen = |[u , v , AB ]| = | vu ∧ | · d
de donde despejando obtenemos:
d = d(r, s) = |vu|
| ]AB ,v ,u[|
∧
Ejemplo:
1) Hallar la distancia entre las rectas r: 3
2z1
y2
1x +=
−=
− y s:
31z
y2
x−−
==−
Calculamos previamente su posición relativa:
Conocemos un punto y un vector respectivos: r: ⎪⎩
⎪⎨⎧
−
−
)3,1,2( u
)2,0,1(A s:
⎪⎩
⎪⎨⎧
−− )3,1,2( v
)1,0,0(B
rg( )v,u = rg ⎟⎟⎠
⎞⎜⎜⎝
⎛−−
−312
312= 1 ya que las filas son proporcionales
rg ( AB ,v,u ) = rg⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
−
301312
312= 2 porque
0112
−−
≠ 0
por tanto r y s son rectas PARALELAS

Colegio Vizcaya Matemáticas II
114
d(r, s)= d( A, r) =|v|
|ABv| ∧=
914
301312
k ji
++
−−−
=14
|J6k j3i 3| +++=
14
|)1 ,9 ,3(|=
A(1,0,-2)
= 1491
= 213
u.
2) Calcula la distancia entre las rectas r: ⎪⎩
⎪⎨
⎧
−==
+=
t1z1y
t3x y s:
11z
11y
3x +
=−−
=
Estudiamos previamente la posición relativa.
Consideramos el punto A(3,1,1) y el vector u=(1,0,-1) de la recta r, y el punto
B(0,1,-1) y el vector v =(3,-1,1) de la recta s.
rg( )v,u = rg ⎟⎟⎠
⎞⎜⎜⎝
⎛−
−113101
=2 ya que 13
01−
≠ 0
rg ( AB ,v,u ) = rg ⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−−
−
203113101
= 3 porque 203
113101
−−−
− =5 ≠ 0
por tanto r y s son rectas CRUZADAS
d(r,s)=|vu|
|]AB ,v ,u[|
∧=
113101
k ji
203113101
−−
−−−
−
= i j j3k|
|5|
−−−−=
|)1,4,1(|5
−−−=
18
5=
18185
u.
Actividad
10. Calcula la distancia entre los pares de rectas:
a) r: ⎪⎩
⎪⎨
⎧
−==
+=
t1z1y
t3x s:
⎩⎨⎧
=+−=
0zy2x0y
b) r:⎪⎩
⎪⎨
⎧
==
+=
2zty
t1x s:
⎪⎩
⎪⎨
⎧
==
−−=
1z0y
t1x
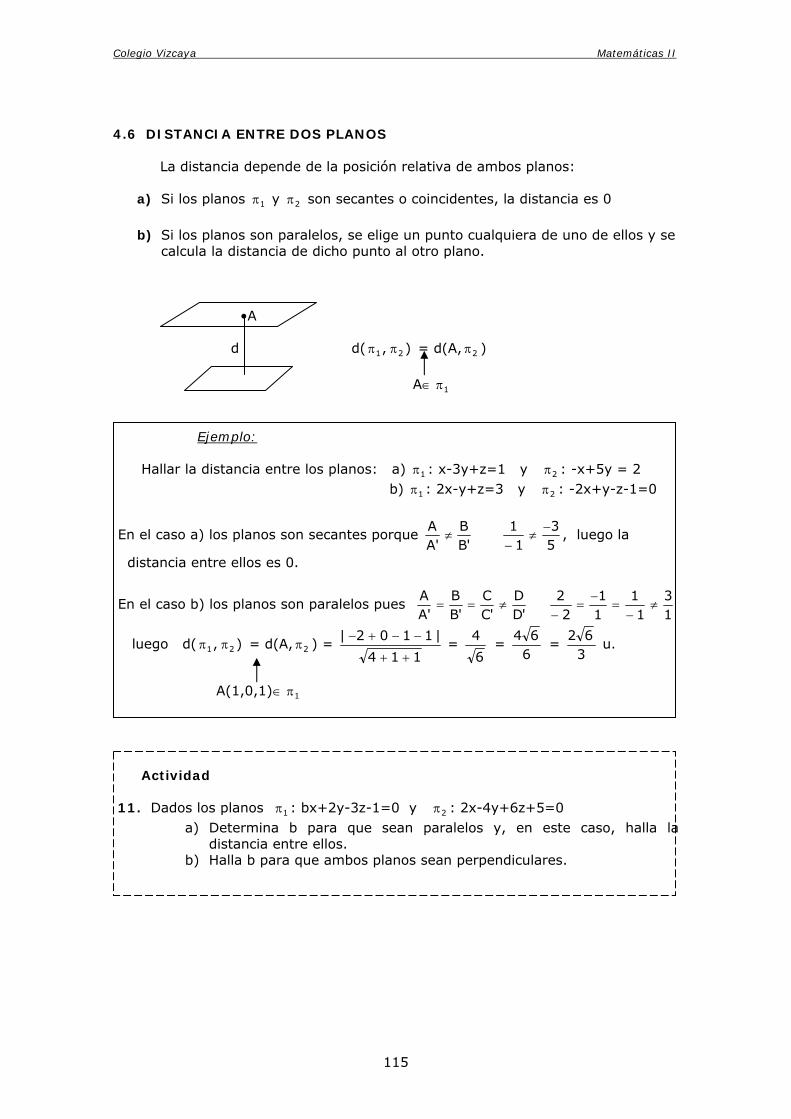
Colegio Vizcaya Matemáticas II
115
4.6 DISTANCIA ENTRE DOS PLANOS La distancia depende de la posición relativa de ambos planos:
a) Si los planos 1π y 2π son secantes o coincidentes, la distancia es 0 b) Si los planos son paralelos, se elige un punto cualquiera de uno de ellos y se
calcula la distancia de dicho punto al otro plano. •A d d( ) , 21 ππ = d(A, 2π )
A 1π∈ Ejemplo: Hallar la distancia entre los planos: a) 1π : x-3y+z=1 y 2π : -x+5y = 2 b) 1π : 2x-y+z=3 y 2π : -2x+y-z-1=0
En el caso a) los planos son secantes porque 'B
B'A
A≠
53
11 −
≠−
, luego la
distancia entre ellos es 0.
En el caso b) los planos son paralelos pues 'D
D'C
C'B
B'A
A≠==
13
11
11
22
≠−
=−
=−
luego d( ) , 21 ππ = d(A, 2π ) = 114
|1102|
++
−−+− =
6
4 =
664
= 362
u.
A(1,0,1) 1π∈ Actividad 11. Dados los planos 1π : bx+2y-3z-1=0 y 2π : 2x-4y+6z+5=0
a) Determina b para que sean paralelos y, en este caso, halla la distancia entre ellos.
b) Halla b para que ambos planos sean perpendiculares.

Colegio Vizcaya Matemáticas II
116
ESPACIO MÉTRICO: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II
1. Halla la distancia entre la recta r:5
1z12y
3x −
=−+
= y la recta paralela a r por
el punto P(-1,2,4). 2. Determina la distancia entre los planos:
1π : ⎪⎩
⎪⎨
⎧
−=−=
++=
stzt2y
st31x y 2π : x+2y+z+3= 0
3. Halla la distancia del origen a la recta paralela al eje X que pasa por el punto
A(3,-2,4).
4. Dada la recta r: 6
2z2y1
2x +
=−= y el plano :π x+3y-3z= -3, calcula:
a) El plano que contiene a r y es perpendicular a π .
b) El volumen del tetraedro determinado por el plano π y los planos coordenados.
5. Halla la distancia del punto P(1,0,1) a la recta r: ⎪⎩
⎪⎨
⎧
=+=−=
3zt22y
t1x
6. Halla las ecuaciones del lugar geométrico de los puntos del plano x=y que
distan 1 del plano 2x+y+z=2. 7. Calcula el área de un cuadrado sabiendo que los puntos P(2,1,2) y Q(6,1,4) son
dos vértices opuestos. 8. Halla el valor de a para que el plano x-y+az+a=0 forme un triángulo de
área 6 al cortar a los ejes coordenados.
9. Halla el valor de a para que el plano x-3a
y+az-a=0 forme un tetraedro de
volumen 3, siendo sus vértices el origen y los puntos de corte con los ejes coordenados.
10. Halla los puntos de la recta r: ⎪⎩
⎪⎨
⎧
=−=−=
tzt24y
t2x que distan tres unidades del punto
A(3,1,3).

Colegio Vizcaya Matemáticas II
117
11. Halla los puntos de la recta r: ⎩⎨⎧
=−=−
0zy0zx
cuya distancia al plano 2x-y+2z+9=0
es dos. 12. Calcula el volumen de un cubo dos de cuyas caras están situadas en los planos
2x-y+2z=1 y 4x-2y+4z=5.
13. Halla el punto P de la recta r: 3z
11y
21x
=+
=−
que equidiste de los planos:
3zyx: −=++α y ⎪⎩
⎪⎨
⎧
+−=+λ−=λ+−=
βt6zty
3x:
14. Sean los puntos P(-2,1,3) y Q(0,-1,7). Por el punto medio del segmento PQ
trazamos un plano π perpendicular a dicho segmento. Este plano corta a los ejes coordenados en los puntos A,B y C.
a) Escribe la ecuación de π b) Calcula el área del triángulo ABC.
15. Calcular la ecuación del plano paralelo al plano x-2y+3z+1=0 y que diste 12
unidades del origen.
PROBLEMAS DE SELECTIVIDAD 16. (JUNIO 2006) Sean P y Q los puntos del espacio de coordenadas P(0,0,0) y
Q(0,1,2). Encontrar la condición que debe verificar un punto de coordenadas A(x,y,z) para que la distancia desde A hasta P sea igual que la distancia desde A hasta Q. ¿El conjunto de todos los puntos que satisfacen esa condición forman un plano? Razona la contestación.
17. (JULIO 2003) Se sabe que la recta r corta perpendicularmente al plano π y que el punto (3,4,0) pertenece a la recta r.
Se sabe además, que el vector 1v = (0,1,1) tiene como extremo y origen
dos puntos del plano π y lo mismo ocurre con el vector 2v (1,0,1). Calcular la ecuación de la recta r. ¿Son suficientes los datos anteriores para hallar la ecuación del plano π? Razonar la respuesta.

Colegio Vizcaya Matemáticas II
118
18. (JULIO 2002) Encontrar la ecuación paramétrica de la recta que contiene al punto P(2,1,3) y cuyo vector de dirección es perpendicular a los vectores:
v (1,2,0) y w (1,1,2). Escribir la ecuación en forma continua. ¿Pertenece el punto Q(1,2,3) a la recta? 19. (JUNIO 2002) Sea la recta r cuya ecuación en forma continua está dada por
2
1z11y
11x −
=−−
=−
Sea 1π el plano de ecuación x+y+z=1 y 2π el plano de ecuación x+y-z=1. Si P1 es el punto de corte de r con 1π y P 2 es el punto de corte de r con 2π , encontrar dichos puntos y la distancia del segmento que determinan. 20. (JUNIO 00) Se considera la recta r cuyas ecuaciones paramétricas son:
⎪⎩
⎪⎨
⎧
===
0ztyt2x y el plano π : x+y+z-1=0
Determinar las coordenadas de un punto P perteneciente a la recta y cuya distancia al plano π sea igual que su distancia al origen de coordenadas. ¿Es único dicho punto? Contestar razonadamente. 21. (SEPTIEMBRE 99) Dado el plano de ecuación π : Ax+By+Cz+D=0 y un punto
P=(a,b,c) exterior al mismo, describir, razonadamente, el proceso que se sigue para calcular la distancia del punto al plano.
Aplicarlo al caso particular en que π : x+2y+3z+20=0 y P(1,-1,-2).
Colegio Vizcaya Matemáticas II
119
UNIDAD 7
LÍMITES DE FUNCIONES 2º BACHILLER

Colegio Vizcaya Matemáticas II
120
OBJETIVOS DIDÁCTICOS 1. Comprender el concepto de límite de una función en un punto mediante una
definición intuitiva. 2. Definir y calcular límites laterales. 3. Determinar la existencia de límites de funciones expresadas en forma analítica
o mediante gráficas. 4. Conocer y manejar las propiedades de los límites.
5. Resolver los tipos más usuales de indeterminación: ok
)ok( ≠ ,
00
, ∞∞
, ∞−∞ , ∞∞⋅ 1,0
CONCEPTOS: 1. Límite de una función en un punto.
2. Límites laterales. 3. Propiedades de los límites.
4. Indeterminaciones. Cálculo de límites
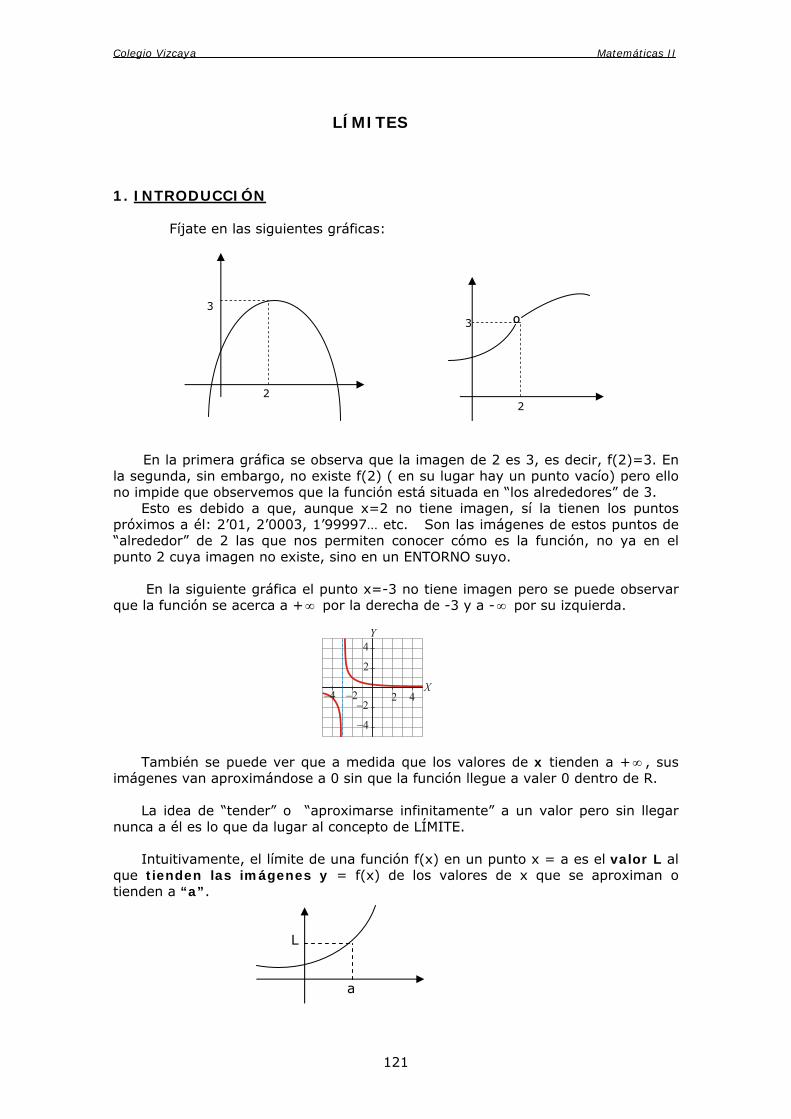
Colegio Vizcaya Matemáticas II
121
LÍMITES 1. INTRODUCCIÓN Fíjate en las siguientes gráficas: 3
3 º
2 2 En la primera gráfica se observa que la imagen de 2 es 3, es decir, f(2)=3. En la segunda, sin embargo, no existe f(2) ( en su lugar hay un punto vacío) pero ello no impide que observemos que la función está situada en “los alrededores” de 3. Esto es debido a que, aunque x=2 no tiene imagen, sí la tienen los puntos próximos a él: 2’01, 2’0003, 1’99997… etc. Son las imágenes de estos puntos de “alrededor” de 2 las que nos permiten conocer cómo es la función, no ya en el punto 2 cuya imagen no existe, sino en un ENTORNO suyo. En la siguiente gráfica el punto x=-3 no tiene imagen pero se puede observar que la función se acerca a +∞ por la derecha de -3 y a -∞ por su izquierda.
También se puede ver que a medida que los valores de x tienden a +∞ , sus imágenes van aproximándose a 0 sin que la función llegue a valer 0 dentro de R. La idea de “tender” o “aproximarse infinitamente” a un valor pero sin llegar nunca a él es lo que da lugar al concepto de LÍMITE. Intuitivamente, el límite de una función f(x) en un punto x = a es el valor L al que tienden las imágenes y = f(x) de los valores de x que se aproximan o tienden a “a”. L a
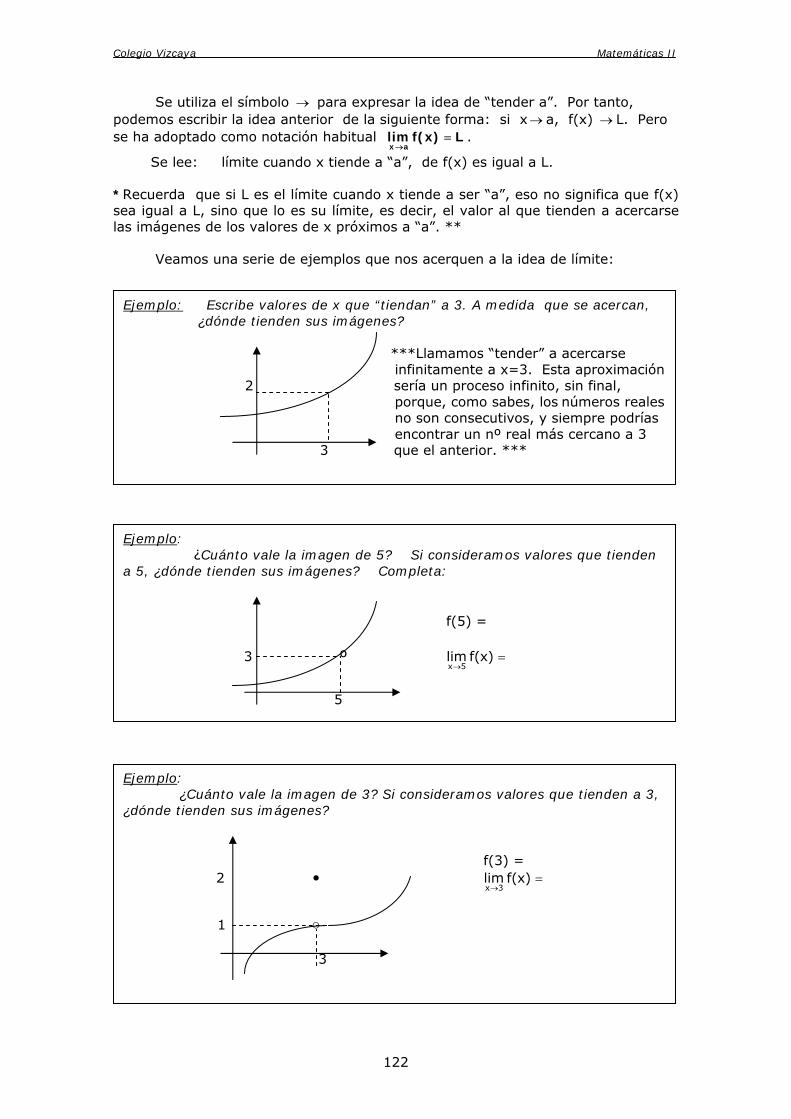
Colegio Vizcaya Matemáticas II
122
Se utiliza el símbolo → para expresar la idea de “tender a”. Por tanto, podemos escribir la idea anterior de la siguiente forma: si x→ a, f(x) → L. Pero se ha adoptado como notación habitual L)x(flim
ax=
→.
Se lee: límite cuando x tiende a “a”, de f(x) es igual a L. *Recuerda que si L es el límite cuando x tiende a ser “a”, eso no significa que f(x) sea igual a L, sino que lo es su límite, es decir, el valor al que tienden a acercarse las imágenes de los valores de x próximos a “a”. ** Veamos una serie de ejemplos que nos acerquen a la idea de límite:
Ejemplo: Escribe valores de x que “tiendan” a 3. A medida que se acercan, ¿dónde tienden sus imágenes? ***Llamamos “tender” a acercarse infinitamente a x=3. Esta aproximación 2 sería un proceso infinito, sin final, porque, como sabes, los números reales no son consecutivos, y siempre podrías encontrar un nº real más cercano a 3 3 que el anterior. ***
Ejemplo: ¿Cuánto vale la imagen de 5? Si consideramos valores que tienden a 5, ¿dónde tienden sus imágenes? Completa: f(5) = 3 º =
→)x(flim
5x
5
Ejemplo: ¿Cuánto vale la imagen de 3? Si consideramos valores que tienden a 3, ¿dónde tienden sus imágenes? f(3) = 2 • =
→)x(flim
3x
1 ○
3
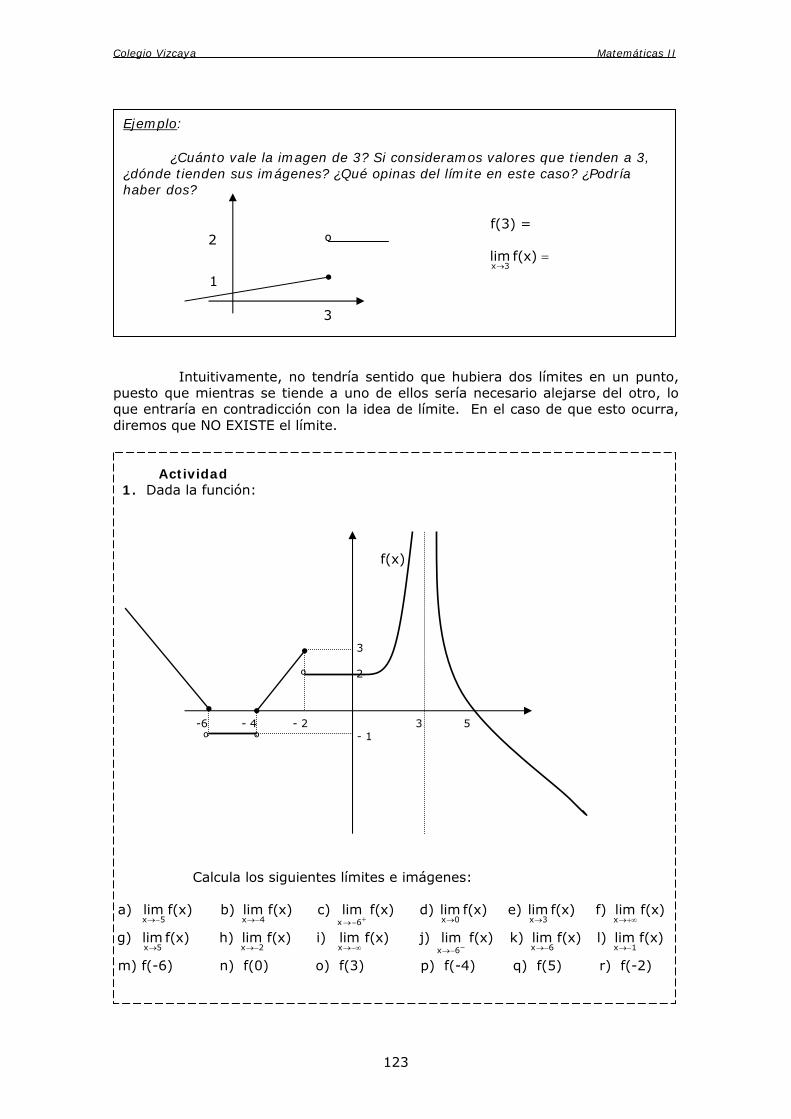
Colegio Vizcaya Matemáticas II
123
Intuitivamente, no tendría sentido que hubiera dos límites en un punto, puesto que mientras se tiende a uno de ellos sería necesario alejarse del otro, lo que entraría en contradicción con la idea de límite. En el caso de que esto ocurra, diremos que NO EXISTE el límite. Actividad 1. Dada la función:
f(x) 3 º 2
-6 - 4 - 2 3 5 º º - 1 Calcula los siguientes límites e imágenes: a)
5xlim
−→f(x) b) )x(flim
4x −→ c) )x(flim
6x +−→ d) )x(flim
0x→ e) )x(flim
3x→ f) )x(flim
x +∞→
g) )x(flim5x→
h) )x(flim2x −→
i) )x(flimx −∞→
j) )x(flim6x −−→
k) )x(flim6x −→
l) )x(flim1x −→
m) f(-6) n) f(0) o) f(3) p) f(-4) q) f(5) r) f(-2)
Ejemplo:
¿Cuánto vale la imagen de 3? Si consideramos valores que tienden a 3, ¿dónde tienden sus imágenes? ¿Qué opinas del límite en este caso? ¿Podría haber dos? f(3) = 2 º =
→)x(flim
3x
1 3
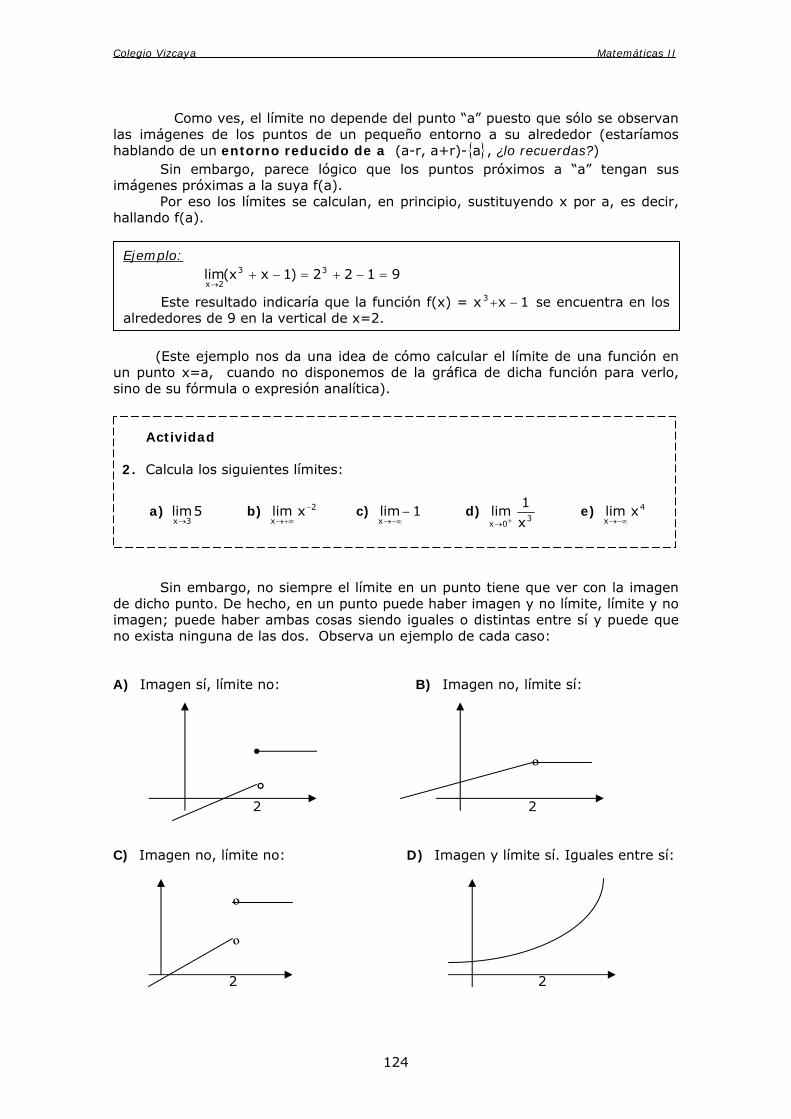
Colegio Vizcaya Matemáticas II
124
Como ves, el límite no depende del punto “a” puesto que sólo se observan las imágenes de los puntos de un pequeño entorno a su alrededor (estaríamos hablando de un entorno reducido de a (a-r, a+r)-{ }a , ¿lo recuerdas?) Sin embargo, parece lógico que los puntos próximos a “a” tengan sus imágenes próximas a la suya f(a). Por eso los límites se calculan, en principio, sustituyendo x por a, es decir, hallando f(a).
(Este ejemplo nos da una idea de cómo calcular el límite de una función en un punto x=a, cuando no disponemos de la gráfica de dicha función para verlo, sino de su fórmula o expresión analítica). Actividad 2. Calcula los siguientes límites:
a) 5lim3x→
b) 2
xxlim −
+∞→ c) 1lim
x−
−∞→ d)
30x x
1lim
+→ e) 4
xxlim
−∞→
Sin embargo, no siempre el límite en un punto tiene que ver con la imagen de dicho punto. De hecho, en un punto puede haber imagen y no límite, límite y no imagen; puede haber ambas cosas siendo iguales o distintas entre sí y puede que no exista ninguna de las dos. Observa un ejemplo de cada caso: A) Imagen sí, límite no: B) Imagen no, límite sí:
º ° 2 2 C) Imagen no, límite no: D) Imagen y límite sí. Iguales entre sí:
º
º
2 2
Ejemplo: 9122)1xx(lim 33
2x=−+=−+
→
Este resultado indicaría que la función f(x) = x 1x3 −+ se encuentra en los alrededores de 9 en la vertical de x=2.

Colegio Vizcaya Matemáticas II
125
E) Imagen y límite sí. Distintos entre sí.
•
º 2 Estarás de acuerdo en que la relación entre el límite y la imagen es ambigua y que el límite resulta más útil precisamente cuando no disponemos de la imagen de un punto, para conocer “dónde” se encuentra la función en los alrededores de dicho punto. (Intuitivamente, vendría a ser como un microscopio que amplía la función en los alrededores de cualquier punto “a”, e informa de la posición de la función en ese pequeño entorno). Vamos a formalizar ahora matemáticamente todas estas ideas. El lenguaje matemático se caracteriza por la búsqueda de la precisión y el rigor a la hora de definir cada concepto. No es lo mismo comprender intuitivamente una idea que escribir con exactitud en qué consiste. Por eso, a veces, resulta complejo leer matemáticas. 2. DEFINICIÓN:
f(x) L a
Se dice que f(x) tiene límite L cuando x tiende a “a” y se escribe L)x(flim
ax=
→, si para cualquier entorno de L (es decir un intervalo ( )ε+ε− L,L ) existe
un entorno reducido de a ( )δ+δ− a,a -{a} tal que todos los ( )δ+δ−∈ a,ax -{a} tienen sus imágenes ( )ε+ε−∈ L,L)x(f .
Todavía podemos escribirlo de manera más reducida: ),L(E∈)x(f⇒),a(*E∈xsi/),a(*E∃),,L(E∀ εδδε Y aún más: ),L(E∈)x(f⇒),a(*E∈xsi/0>∃,0>∀ εδδε (∀ : para todo ∃ : existe) Con esta definición se pretende especificar cuál es la condición que cumple L y sólo L: que en cualquiera de sus entornos se pueden encontrar imágenes de puntos x muy próximos a “a”. Dicho de otra forma, para cualquier “alrededor” de L encontraremos un pequeño entorno de “a” cuyos puntos tienen sus imágenes en el entorno de L. De
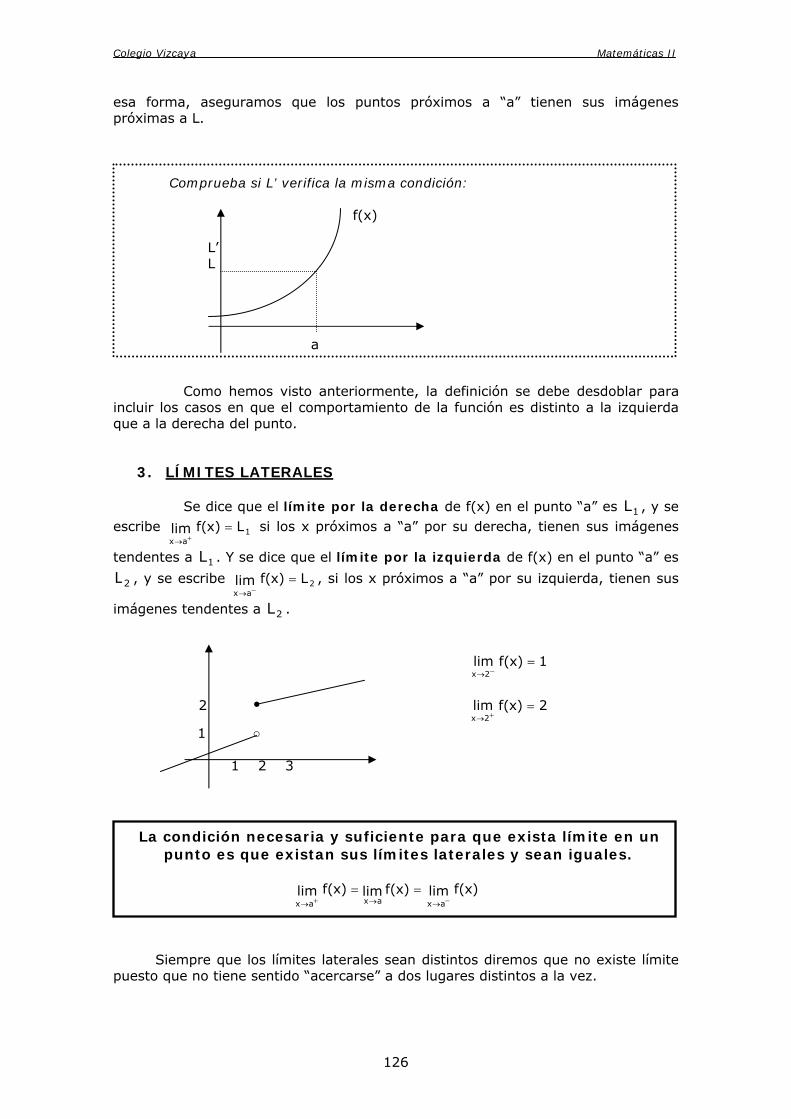
Colegio Vizcaya Matemáticas II
126
esa forma, aseguramos que los puntos próximos a “a” tienen sus imágenes próximas a L. Comprueba si L’ verifica la misma condición:
f(x) L’ L a
Como hemos visto anteriormente, la definición se debe desdoblar para incluir los casos en que el comportamiento de la función es distinto a la izquierda que a la derecha del punto.
3. LÍMITES LATERALES
Se dice que el límite por la derecha de f(x) en el punto “a” es 1L , y se escribe 1
ax
L)x(flim =+→
si los x próximos a “a” por su derecha, tienen sus imágenes
tendentes a 1L . Y se dice que el límite por la izquierda de f(x) en el punto “a” es
2L , y se escribe 2ax
L)x(flim =−→
, si los x próximos a “a” por su izquierda, tienen sus
imágenes tendentes a 2L . 1)x(flim
2x=
−→
2 2)x(flim
2x=
+→
1 ○ 1 2 3
Siempre que los límites laterales sean distintos diremos que no existe límite puesto que no tiene sentido “acercarse” a dos lugares distintos a la vez.
La condición necesaria y suficiente para que exista límite en un punto es que existan sus límites laterales y sean iguales.
=
+→
)x(flimax
=→
)x(flimax
)x(flimax −→
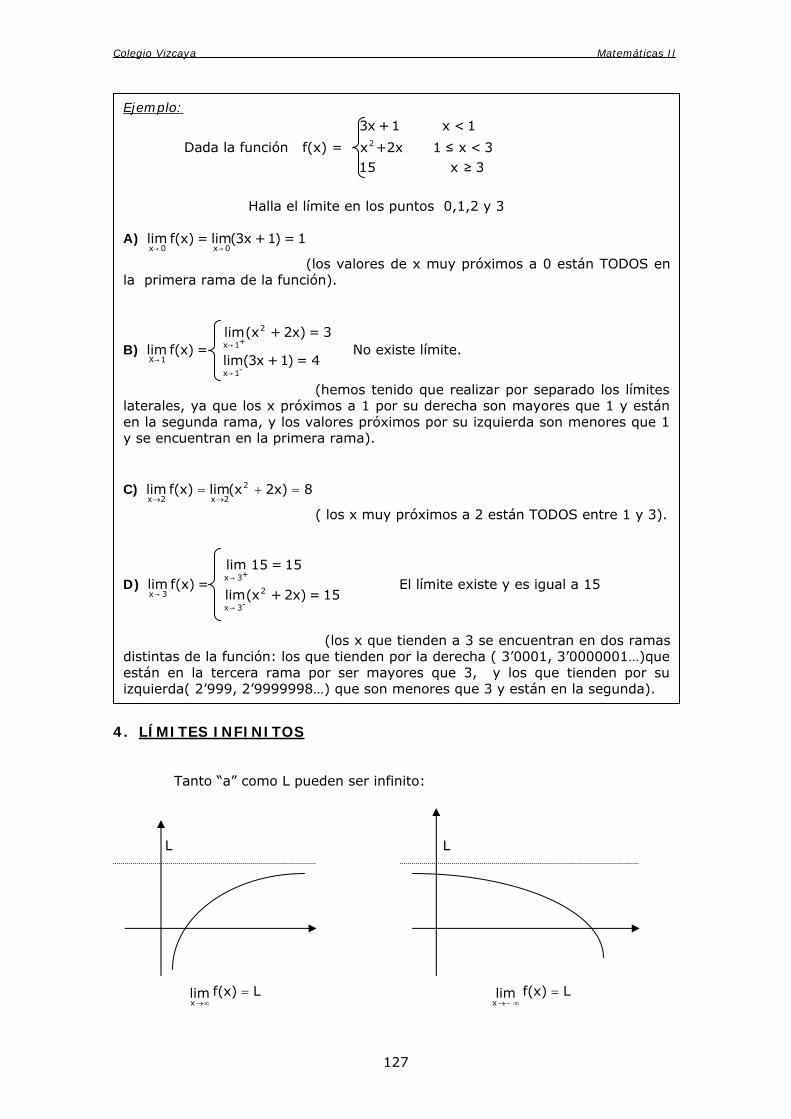
Colegio Vizcaya Matemáticas II
127
4. LÍMITES INFINITOS Tanto “a” como L pueden ser infinito:
L L
L)x(flim
x=
∞→ L)x(flim
x=
∞−→
Ejemplo:
Dada la función f(x) = 3x153<x1x2+x
1<x1+x32
≥≤
Halla el límite en los puntos 0,1,2 y 3 A) 1=)1+x3(lim=)x(flim
0→x0→x
(los valores de x muy próximos a 0 están TODOS en la primera rama de la función).
B) 4=)1+x3(lim
3=)x2+x(lim=)x(flim
-1→x
2
+1→x
1→X No existe límite.
(hemos tenido que realizar por separado los límites laterales, ya que los x próximos a 1 por su derecha son mayores que 1 y están en la segunda rama, y los valores próximos por su izquierda son menores que 1 y se encuentran en la primera rama). C) 8)x2x(lim)x(flim 2
2x2x=+=
→→
( los x muy próximos a 2 están TODOS entre 1 y 3).
D) 15=)x2+x(lim
15=15lim=)x(flim 2
-3x
+3x
3x
→
→
→ El límite existe y es igual a 15
(los x que tienden a 3 se encuentran en dos ramas distintas de la función: los que tienden por la derecha ( 3’0001, 3’0000001…)que están en la tercera rama por ser mayores que 3, y los que tienden por su izquierda( 2’999, 2’9999998…) que son menores que 3 y están en la segunda).
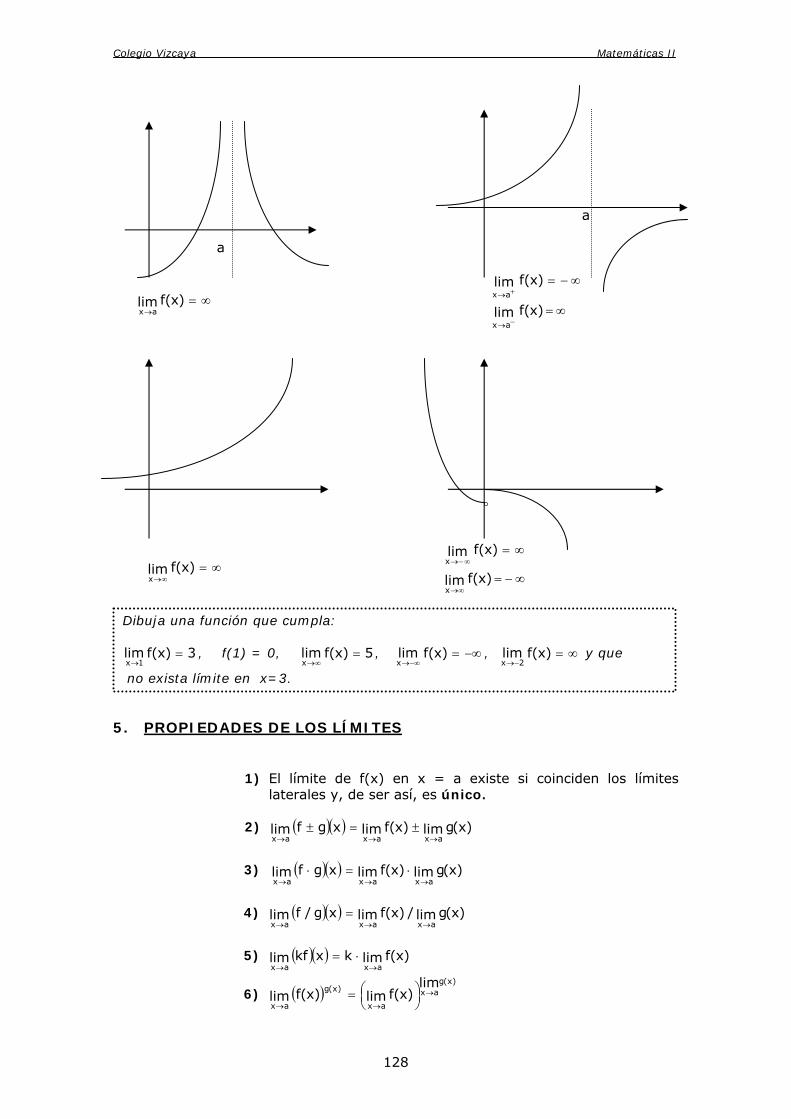
Colegio Vizcaya Matemáticas II
128
a a
∞=→
)x(flimax
∞=
∞−=
−→
+→
)x(flim
)x(flim
ax
ax
o
∞=∞→
)x(flimx
∞−=
∞=
∞→
∞−→
)x(flim
)x(flim
x
x
Dibuja una función que cumpla: 3)x(flim
1x=
→, f(1) = 0, 5)x(flim
x=
∞→, −∞=
−∞→)x(flim
x, ∞=
−→)x(flim
2x y que
no exista límite en x=3. 5. PROPIEDADES DE LOS LÍMITES
1) El límite de f(x) en x = a existe si coinciden los límites
laterales y, de ser así, es único. 2) ( )( ) )x(glim)x(flimxgflim
axaxax →→→±=±
3) ( )( ) )x(glim)x(flimxgflim
axaxax →→→⋅=⋅
4) ( )( ) )x(glim/)x(flimxg/flim
axaxax →→→=
5) ( )( ) )x(flimkxkflim
axax →→⋅=
6) ( ))x(g
ax
ax
)x(g
ax
lim)x(flim)x(flim →
→→⎟⎠⎞⎜
⎝⎛=

Colegio Vizcaya Matemáticas II
129
Como puedes observar, operar con límites es sencillo, pues se cumple que el límite de la suma, resta, multiplicación, división y potencia es la suma, resta, multiplicación, división y potencia de los límites respectivamente. Si disponemos de la gráfica de la función, parece sencillo calcular el límite en cada punto. Pero lo habitual es que conozcamos no su gráfica, sino su fórmula o expresión analítica. Necesitamos, por tanto, aprender a calcular límites a partir de la expresión analítica de la función. 6. CÁLCULO DE LÍMITES Ya habíamos indicado anteriormente que lo natural es que el límite coincida con la imagen, ya que los puntos próximos a “a” tendrán imágenes próximas a la suya f(a). (También hemos dicho que esto no tiene por qué ser cierto). Por eso, los límites se calculan inicialmente cambiando x por “a”.
Pero observa lo que sucede en los siguientes casos:
3x
9x6xlim
2
3x −+−
→=
00
x
2xlimx
+∞→
= ∞∞
=−→ 1xx2
lim1x
02
Algunas de estas operaciones te resultarán desconocidas. ¿Cuánto es 00
ó ∞∞
?
Muy sencillo, sabemos que 3515
= porque 3·5=15. Luego 00
debe ser un nº
que multiplicado por 0 dé 0. ¡¡Y todos los números reales cumplen eso!!
Por tanto, 00
es un número cualquiera o indeterminado, es decir, 00
=k porque
k·0=0.
Se dice entonces que 00
es una INDETERMINACIÓN.
Ejemplos: 1) 2)2(3)2()x3x(lim 22
2x−=−+−=+
−→
2) 275
x1x2
lim33x
=−
→
3) ∞=+∞=+∞→
3·2)3x2(limx
Representa gráficamente, de manera aproximada, los resultados obtenidos.

Colegio Vizcaya Matemáticas II
130
Observa que ocurre exactamente lo mismo con la operación ∞∞
. Sabemos que
cualquier nº multiplicado por ∞ da ∞ . Por eso ∞∞
=k , ya que k· ∞=∞
Luego también ∞∞
es una INDETERMINACIÓN.
De hecho son la misma operación, ya que podemos escribir: ∞∞
=
0503
= 0·50·3
= 00
Igualmente son indeterminaciones: ∞⋅∞≠∞−∞ ∞ 0,0,,1),0k(0k
, 00
Veamos cómo “determinar” en cada caso las indeterminaciones, es decir, cómo averiguar en cada función y punto concretos, cuál es el valor que adopta la indeterminación:
Esta “indeterminación” es diferente a las demás pues 0k
no es igual a cualquier
nº real. De hecho no es igual a ninguno, pues ningún nº real multiplicado por 0 puede dar k. Ya sabíamos que cualquier número dividido entre 0 da ∞ . El problema está en el signo: puede ser ± ∞ . Ello se debe a que el denominador no es 0 exactamente, sino que “tiende” a serlo. Y no sabemos si se acerca a 0 por su izquierda (por los números negativos), o por su derecha (positivos). Por eso es necesario calcular los límites laterales: para determinar si el resultado es +∞ , -∞ . Si existen los límites laterales y son iguales, la función tiene límite; si son distintos, el límite no existe.
6.1 Indeterminación 0kcon0k
≠
Ejemplo: 2x1x3
lim2x −
+→
= 07

Colegio Vizcaya Matemáticas II
131
Actividad 3. Calcula los siguientes límites: (Tipo k/0 k 0≠ )
a) 1x
x3lim
21x −→ b)
6x2x
lim3x +−→
c) 4x
1lim
4x −→ d)
20x x1
lim→
Vamos a establecer dos casos:
A) Si f(x) es racional (cociente de polinomios como en el ejemplo anterior), el hecho de obtener el valor 0 al sustituir x por 2 tanto en el numerador como en el denominador, significa que 2 es una raíz de ambos polinomios. Por tanto, si los
Ejemplo:
1x
2lim
1x −→=
02
indeterminación. Calculamos los límites laterales:
1x
2lim
1x −+→=
+02
= +∞
Como los números que tienden a 1 por su derecha son de la forma 1’0001, 1’0000001…, al sustituirlos en x y restar 1 se obtienen valores cada vez más próximos a 0 pero siempre positivos (se indica escribiendo 0 + ). Sin embargo, si x tiende a 1 por su izquierda toma valores de la forma 0’999, 0’999999…, y la resta de 1 dará como resultado números tendentes a 0, pero negativos.
1x
2lim
1x −−→ =
−02
= -∞
Como los límites laterales no coinciden, diremos que no existe límite en x=1. Pero eso no impide que hayamos cumplido nuestro objetivo: ahora sabemos cómo es la función en un pequeño entorno de 1. ¿No es así? 1
6.2 Indeterminación 00
Ejemplo: 2x
4x4xlim
2
2x −+−
→=
0
0

Colegio Vizcaya Matemáticas II
132
descomponemos en factores, aparecerá el factor (x-2) en el numerador y en el denominador y podrá simplificarse.
Por eso, en el caso 0
0 se descomponen numerador y denominador
en factores y se simplifica el factor (x – a) que será común a ambos.
B) Si f(x) contiene raíces cuadradas, se multiplica numerador y denominador por la expresión conjugada.
Actividad 4. Calcula los siguientes límites: (Tipo 0/0 )
a) 1x1x
lim4
3
1x −−
→ b)
x1)x1(
lim2
0x
−+→
c) 21x )1x(
2x2lim
−−
→ d)
xx
x2x2lim
20x ++−−
→
Ejemplo:
11-2)1-x(lim)2-x(
)1-x)(2-x(lim
.adormindenoynumeradorfactoresenmosdescompone
adominerdetin00
2-x2x3-x
lim
2x2x
2
2x
===
=+
→→
→
¿Existe f(2)? ¿Qué significa que el límite sea 1?
Ejemplo:
( )( )
( )
( ) ( ) ( ) ( )6-=
11+13
=1
1+0-13=
11+x-13
lim=x
1+x-1x3lim
=1-x-1
1+x-1x3lim=
1-x-1
1+x-1·x3lim=
1+x-1
1+x-1
1-x-1
x3lim
adormindenodelconjugadoelpor
adormindenoynumeradormosmultiplica,adominerdetin00
=1-x-1
x3lim
0x0x
0x220x0x
0x
-
-
-
-
·
→→
→→→
→
Haz un esbozo gráfico del resultado.
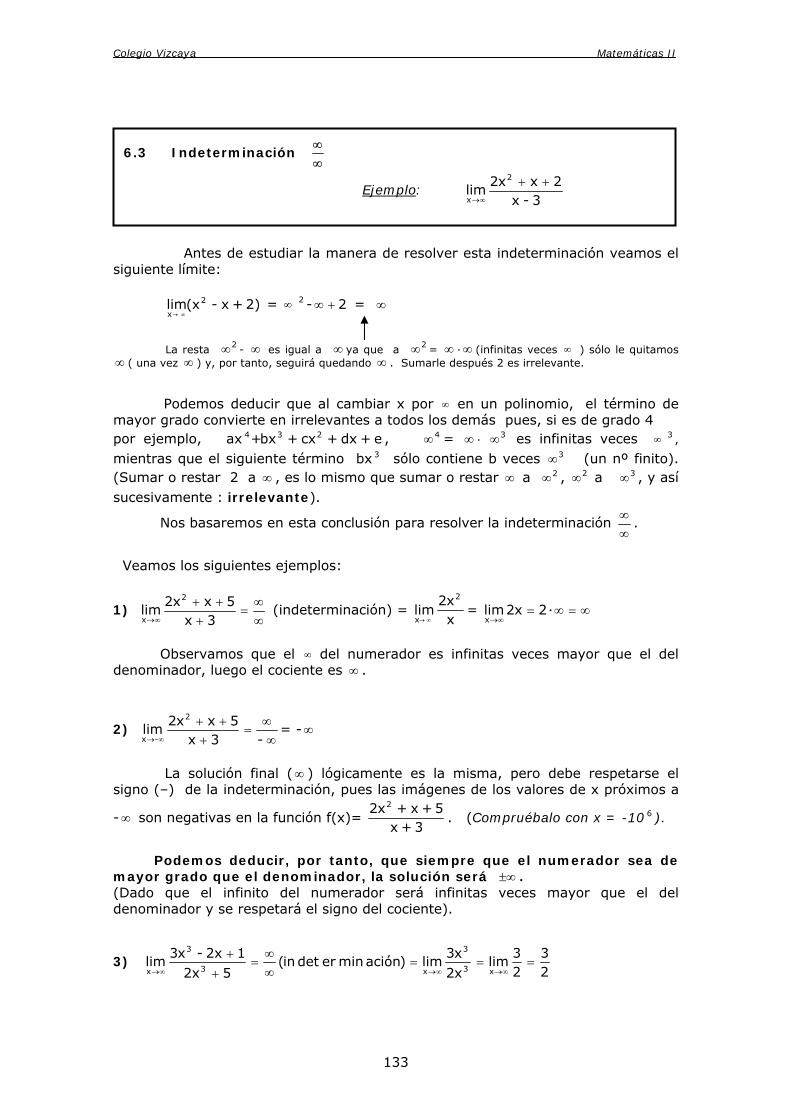
Colegio Vizcaya Matemáticas II
133
Antes de estudiar la manera de resolver esta indeterminación veamos el
siguiente límite: 2)+x-x(lim 2
x ∞→ = 2∞ - 2+∞ = ∞
La resta 2∞ - ∞ es igual a ∞ ya que a 2∞ = ∞ ·∞ (infinitas veces ∞ ) sólo le quitamos
∞ ( una vez ∞ ) y, por tanto, seguirá quedando ∞ . Sumarle después 2 es irrelevante.
Podemos deducir que al cambiar x por ∞ en un polinomio, el término de mayor grado convierte en irrelevantes a todos los demás pues, si es de grado 4 por ejemplo, ax e+dx+cx+bx+ 234 , 4∞ = ∞ · 3∞ es infinitas veces 3∞ ,
mientras que el siguiente término bx 3 sólo contiene b veces 3∞ (un nº finito). (Sumar o restar 2 a ∞ , es lo mismo que sumar o restar ∞ a 2∞ , 2∞ a 3∞ , y así sucesivamente : irrelevante).
Nos basaremos en esta conclusión para resolver la indeterminación ∞∞
.
Veamos los siguientes ejemplos:
1) ∞∞
=+
++∞→ 3x
5xx2lim
2
x (indeterminación) =
xx2
lim2
∞→x= ∞=∞=
∞→·2x2lim
x
Observamos que el ∞ del numerador es infinitas veces mayor que el del denominador, luego el cociente es ∞ .
2) ∞∞
=+
++∞→ -3x
5xx2lim
2
-x= -∞
La solución final (∞ ) lógicamente es la misma, pero debe respetarse el signo (–) de la indeterminación, pues las imágenes de los valores de x próximos a
-∞ son negativas en la función f(x)= 3+x
5+x+x2 2
. (Compruébalo con x = -10 6 ).
Podemos deducir, por tanto, que siempre que el numerador sea de mayor grado que el denominador, la solución será ±∞ . (Dado que el infinito del numerador será infinitas veces mayor que el del denominador y se respetará el signo del cociente).
3) 23
23
limx2x3
lim)aciónminerdetin(5x2
12x-x3lim
x3
3
x3
3
x===
∞∞
=+
+∞→∞→∞→
6.3 Indeterminación ∞∞
Ejemplo: 3-x
2xx2lim
2
x
++∞→

Colegio Vizcaya Matemáticas II
134
Esto significa que si los polinomios son del mismo grado, el límite coincidirá con el cociente de los coeficientes de mayor grado. Lógicamente, la división entre 3 veces 3∞ y 2 veces 3∞ , es 3/2, pues ambos infinitos son de la misma categoría.
4) x3+x
1-x3lim 3∞→x
= 03
x3
limxx3
lim)aciónminerdetin(2x3x
=∞
===∞∞
∞→∞→
Deducimos también que si el numerador es de grado menor que el
denominador, la solución será siempre 0. La razón es evidente: el denominador es infinitamente mayor, y la división
entre infinito es 0.
Con estas conclusiones podemos calcular cualquier límite de la forma ∞∞
,
aunque no venga dado como un cociente de polinomios.
5) 0.)detin(1x
2x-x3lim
6
2
x=
∞∞
=+
+∞→
El numerador es de grado 2 y el denominador de grado 3 (6/2). Actividad 5. Calcula los siguientes límites: (Tipo ∞∞ / )
a) 2x1x2
lim3
2
x +−
∞→ b)
2x51xx2
lim2
2
x +−−+
∞→ c)
5xx23xx4
lim2
23
x +−+−
−∞→ d)
x1)x1(
lim2
x
−+∞→
Distinguimos dos casos:
A) Si f(x) es la resta de dos funciones racionales se opera primero hasta conseguir una función racional.
6.4 Indeterminación ∞−∞
Ejemplo: )x-3+x(lim∞→x

Colegio Vizcaya Matemáticas II
135
B) Si f(x) es una resta de funciones con raíces cuadradas, se multiplica y se divide por la expresión conjugada.
Actividad
6. Calcula los siguientes límites: (Tipo ∞−∞ )
a) )x- 3x(lim 2
x
∞→+ b) )x31x(lim 2
x−+
∞→ c) 1xx2x(lim 22
x−−−
∞→)
Estarás de acuerdo en que el límite es más útil precisamente cuando es indeterminado, puesto que eso indica que probablemente no hay imagen. La información que aporta el límite, aunque aproximada, sustituye a la que debería haber dado la imagen.
Ejemplo:
∞∞=⎟⎠
⎞⎜⎝
⎛→
-1-x
1-
1-xx2
lim21x
indeterminación. Resolvemos el paréntesis:
1-x
1)+(x-x2lim 21→x
= 21
=1+x
1lim=
1)-1)(x+(x1-x
lim=1-x1-x
lim1→x1→x21→x
**Recuerda que debes conocer la interpretación gráfica del resultado obtenido, pues de otra manera no tendría sentido calcular límites** ½ º 1
Ejemplo:
( )
( )( )
0=1
=x+1+x
1lim
=x+1+x
x-1+xlim=
x+1+x
x+1+xx-1+xlim
.conjugadaresiónexplaporadormindeno
ynumeradormosmultiplica,adominerdetin,-=x-1+xlim
24x
24
44
x24
2424
x
24
x
∞
∞∞
∞→
∞→∞→
∞→

Colegio Vizcaya Matemáticas II
136
6.5 Indeterminación 1 ∞
Ejemplo: x1
0x)x31(lim −
→
Partimos del hecho de que el número e se define como el siguiente límite:
n
n n1
1lim ⎟⎠
⎞⎜⎝
⎛ +∞→
= e
Calcula unos cuántos términos de la sucesión y observa su comportamiento al aumentar el valor de n. Igualmente podemos afirmar que siempre que f(x) ∞±→ se cumple:
)x(f
x )x(f1
1lim ⎟⎟⎠
⎞⎜⎜⎝
⎛+
∞→= e
Dado que el límite anterior supone una indeterminación del tipo 1 ∞ , optaremos por adecuar a este formato cualquier otra función que plantee la misma indeterminación. Veamos un ejemplo: Ejemplo:
3x
x 2x1x
lim+
∞→⎟⎠
⎞⎜⎝
⎛−+
= 1 ∞
3x
x 2x1x
lim+
∞→⎟⎠
⎞⎜⎝
⎛−+
= 3x
x1
2x1x
1lim+
∞→⎟⎠
⎞⎜⎝
⎛ −−+
+ = 3x
x 2x2x1x
1lim+
∞→⎟⎠
⎞⎜⎝
⎛−
+−++ =
3x
x 2x3
1lim+
∞→⎟⎠
⎞⎜⎝
⎛−
+ =
Sumamos y restamos 1 para adecuar la base al formato 1+1/f(x)
=
3x
x
32x
11lim
+
∞→
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−+ =
3)(x · 2x
3
32x
x
32x
11lim
+−−
∞→
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−+ = e 2x
9x3
xlim
−+
∞→ = e 3
Adecuamos el exponente Dado que la base Para conseguir el formato adopta la forma
)x(f
)x(f1
1 ⎟⎟⎠
⎞⎜⎜⎝
⎛+ pero sin
∞→xlim
)x(f
)x(f1
1 ⎟⎟⎠
⎞⎜⎜⎝
⎛+
modificar la función inicial su límite es el nº e Observa que podemos manipular la forma de la función según nuestros intereses siempre que realicemos simultáneamente las operaciones recíprocas para mantener la función inicial. En unidades posteriores aprenderemos otras técnicas que nos permitirán resolver igualmente estas indeterminaciones.

Colegio Vizcaya Matemáticas II
137
LÍMITES: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II 1. Calcula los límites de las funciones siguientes en los puntos indicados.
Representa gráficamente los resultados.
a) f(x) = 4x
x2
3
− en -2, 1, 2 b) f(x) =
1x1x2x2
−+−
en 0, 1
2. Calcula el límite cuando x ∞→ de las funciones y representa los resultados
obtenidos.
a) f(x) = -x 2x72 ++ b) f(x) = x52
c) f(x) = 2x-x 2 d) f(x) = 5
2x3 3 −
3. Calcula el límite cuando x ∞→ y x −∞→ de las siguientes funciones y
representa los resultados obtenidos.
a) f(x) = 2x1−
b) f(x) = 1x
x22
3
+ c) f(x) =
4
4
x1x3
+−
d) f(x) = -2x 1xx5 35 +−+
4. Dada la función f(x) = ⎪⎩
⎪⎨
⎧
≥<≤−
−<+
1x11x2x
2x1x32 calcula:
a) )x(flim
2x +−→ b) )x(flim
2x −→ c) )x(flim
0x→ d) )x(flim
1x −→ e) )x(flim
1x +→
f) )x(flim1x→
g) )x(flimx +∞→
h) )x(flimx −∞→
i) )x(flim3x→
j) f(-2)
k) f(1) l) f(-1) m) f(7) Comprueba los resultados obtenidos realizando la representación gráfica. 5. Calcula los siguientes límites: (Tipo 0·∞ )
a) ⎟⎠
⎞⎜⎝
⎛2 - x3
x2·xlim
43
x ∞→ b) ⎟
⎟⎠
⎞⎜⎜⎝
⎛
−−
→ 1x2
·5
1xlim
1x
6. Calcula los siguientes límites: (Tipo 1 ∞ )
a) x1
0x)x21(lim −
→ b)
x
2
2
x 3xx
lim ⎟⎟⎠
⎞⎜⎜⎝
⎛
+∞→ c)
2x3
x 1x3x32
lim ⎟⎠
⎞⎜⎝
⎛−
+∞→
d) x2
x 1x52x5
lim ⎟⎠
⎞⎜⎝
⎛+−
∞→

Colegio Vizcaya Matemáticas II
138
7. Calcula los siguientes límites:
1) ⎟⎠
⎞⎜⎝
⎛−
−+−→ 1x
7
4x5x
4lim 21x
2) ⎟⎠⎞⎜
⎝⎛ −+
∞→xx3xlim 3
x
3) ⎟⎠
⎞⎜⎝
⎛+
−→ 20x x3x
1x1
lim 4) ⎟⎠
⎞⎜⎝
⎛−
−+−→ 3x
56x5x
2lim 23x
5) ⎟⎠⎞⎜
⎝⎛ −−+
∞→x7x5xlim 22
x 6) ⎟
⎠
⎞⎜⎝
⎛−
−−→ 31x x1
3x1
1lim
7) ⎟⎠⎞⎜
⎝⎛ −+−
∞→x2x4xlim 2
x 8) ⎟
⎟⎠
⎞⎜⎜⎝
⎛ ++−→ x
x11lim
0x
9) 4x4x
x2xlim 2
2
2x +−−
→ 10)
xx42
lim0x
−−→
11) 9x
3x2x2xlim 2
23
3x −−−−
→ 12)
x2x3xx2x4
lim 2
23
0x ++−
→
13) 4x
8x6xlim
2
4x −+−
→ 14)
4x1x2x3
lim 3
2
x +−−
∞→
15) 1x
1xlim
1x −
−→
16) x1x1
xlim
0x −−+→
17) 4xx
x3x21lim 32
3
x −+−+
∞→ 18)
x2
x x41
1lim ⎟⎠
⎞⎜⎝
⎛ +∞→
8. Representa gráficamente funciones que satisfagan las siguientes condiciones: a) 2-=)x(flim
2x→; f(2)=5; Dom(f)=R; Im(f)=(-2,+∞)
b) 4)x(glim
1x=
→; g(x) estrictamente creciente en ( )1,∞− ; Im(g)= ( ]4,∞−
c) 3)x(hlim
2x
=−→
; 5)x(hlim2x
=+→
; h(2)=4 ; Dom(h)= [ ]3,0
d) )x(tlim=)x(tlim=4=)x(tlim
1x0x1-x →→→
e) )x(flim;2<x0)x(f;2>x0>)x(f
2x→∃∀≤∀
f) Dom(f) = R - ( ]3,2 ; Imf = R; 0)x(flim
2x
=−→
; 2)x(flim3x
−=+→
; f(0)=0
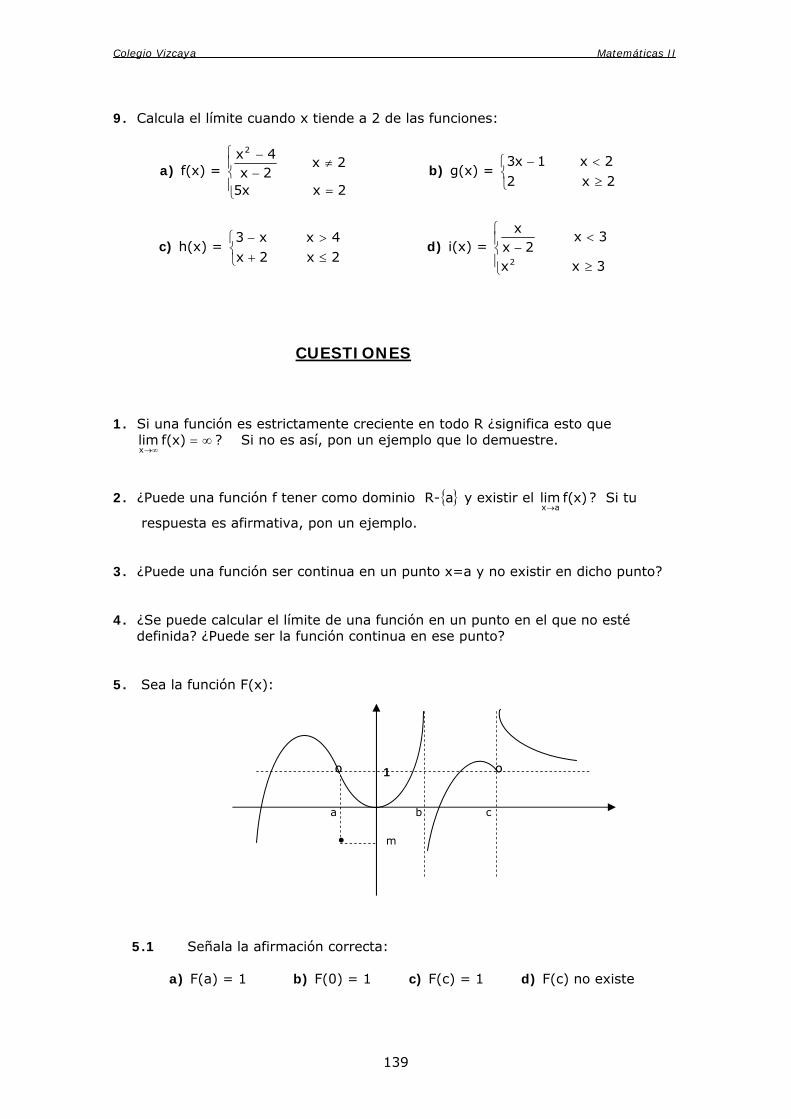
Colegio Vizcaya Matemáticas II
139
9. Calcula el límite cuando x tiende a 2 de las funciones:
a) f(x) = ⎪⎩
⎪⎨⎧
=
≠−−
2xx5
2x2x4x2
b) g(x) = ⎩⎨⎧
≥<−
2x22x1x3
c) h(x) = ⎩⎨⎧
≤+>−
2x2x4xx3
d) i(x) = ⎪⎩
⎪⎨⎧
≥
<−
3xx
3x2x
x
2
CUESTIONES 1. Si una función es estrictamente creciente en todo R ¿significa esto que ∞=
∞→)x(flim
x? Si no es así, pon un ejemplo que lo demuestre.
2. ¿Puede una función f tener como dominio R-{ }a y existir el )x(flim
ax→? Si tu
respuesta es afirmativa, pon un ejemplo. 3. ¿Puede una función ser continua en un punto x=a y no existir en dicho punto? 4. ¿Se puede calcular el límite de una función en un punto en el que no esté definida? ¿Puede ser la función continua en ese punto? 5. Sea la función F(x): º 1 º a b c • m 5.1 Señala la afirmación correcta: a) F(a) = 1 b) F(0) = 1 c) F(c) = 1 d) F(c) no existe

Colegio Vizcaya Matemáticas II
140
5.2 Señala la afirmación correcta:
a) 1)x(Flim
ax=
→ b) 1)x(Flim
cx=
→ c) ∞=
→)x(Flim
cx d) m)x(Flim
ax=
→
5.3 Señala la afirmación correcta: a) 1)x(Flim
x=
−∞→ b) F(0)=0 c) ∞=
→)x(Flim
bx d) F(b)=0
5.4 Señala la afirmación correcta: a) 1)x(Flim
0x=
−→ b) −∞=
−→)x(Flim
bx c) ∞=
−→)x(Flim
cx d) 1)x(Flim
x=
∞→
5.5 Señala la afirmación correcta:
a) Si x<0, entonces F(x)>0 b) Si x>c, entonces F(x)>1 c) Si 0<x<b, entonces F(x)<0 d) Si b<x<c, entonces F(x)>1
6. Dadas las funciones f(x) = 2x4x2
+−
y g(x) = x-2, señala la afirmación falsa:
a) Si x∈Dom(f) ∩Dom(g), entonces f(x) = g(x) b) )x(glim)x(flim
2x2x −→−→=
c) Si x∈Dom(f), entonces f(x) = g(x) d) Alguna de las afirmaciones anteriores es falsa.
7. ¿Cuál es el 2
0xxlim −
→?
a) existe sólo por la izquierda b) 0 c) es indeterminado d) no existe.
8. La función f(x) = ⎩⎨⎧
≥−<+2x1x22x1x
, en x=2 es
a) continua, pues )2(f)x(flim
2x=
→
b) discontinua, pues )x(flim)x(flim2x2x +→−→
≠
c) discontinua, pues no existe f(2) d) nada de los anterior es cierto.

Colegio Vizcaya Matemáticas II
141
9. Si f(x)=1x1x
2
3
−−
, entonces
a) f(1) = )x(flim
1x→=1
b) f(1) = )x(flim1x→
=23
c) f(1) no existe, pero )x(flim1x→
=23
d) f(1) no existe, pero )x(flim1x→
=1
10. Tras un estudio demográfico se ha determinado que el número de habitantes
de cierta población, en los próximos años, vendrá dado por la función:
f(x)= 1x2
200.7x500.14++
donde x es el número de años transcurridos.
a) ¿Cuántos habitantes tiene la población en la actualidad? b) ¿Cuántos tendrá dentro de un año? ¿Y dentro de dos? c) Suponiendo que la función fuese válida hasta el final de los
tiempos ¿crees que la población crecería indefinidamente o se estabilizaría en torno a un determinado número de habitantes? Justifica la respuesta.
Ampliación
1. ⎟⎠⎞⎜
⎝⎛ −+ 1xxxlim 2
x-
∞→= -
21
2. 1-x
1-xlim
3x ∞→=0
3. 1x
2xx2xlim 2
23
1x --
→
−+=3 4. ⎟
⎠⎞⎜
⎝⎛ ++ 2323
xxxx3xlim -
∞→=∞
5. lim∞x→
⎟⎠⎞⎜
⎝⎛ −+− x6x5x2 =-
25
6. 6xx
x2x3xlim 2
23
2x ---→
++=-
52
7.1x1x
lim2
1x --
→=2 8.
x5+x2x3x6+x2
2
23
0xlim
-→
=-53
9. 1x1x
lim 2
3
1x --
→=
23
10. 1+xxxx2+x4x2
23
23
1xlim --
-→
=1
11. 3x
9x6xlim
2
3x --
→
+=0 12.
4x4x6x5x
lim 2
2
2x ++
--
→=No existe
13.2+x3+x3+x
6+x7+x2lim 23
2
2-x→= -
31
14. ( )2x2xlimx
−+ -∞→
=0
15. 9x6x
x3xlim 2
2
3x +−−
→=No existe 16.
x-1-x+1
xlimx 0→
=1
17. 49x
3x2lim 27x −
−−→
=-561
18. 2x3x
4xlim 2
2
2x +−−
→ =4
19. 1x1x
lim 2
3
1x −+
−→= -
23
20. 25x
10x5xlim 2
2
5x −+−
→=No existe
21. 2x3x
1xlim 2
2
1x ++−
−→=-2 22. ⎟
⎠
⎞⎜⎝
⎛−
−+−→ 2x
46x5x
3lim 22x
=No existe

Colegio Vizcaya Matemáticas II
142
Colegio Vizcaya Matemáticas II
143
UNIDAD 8
CONTINUIDAD 2º BACHILLER
Colegio Vizcaya Matemáticas II
144
OBJETIVOS DIDÁCTICOS 1. Conocer y estudiar la continuidad de una función en un punto y en un intervalo. 2. Distinguir los diferentes tipos de discontinuidades. 3. Conocer el enunciado y la interpretación geométrica de los principales teoremas
de continuidad, tanto en un punto como en un intervalo. 4. Aplicar los toremas de continuidad en la resolución de problemas y en la
existencia de soluciones de una ecuación. CONCEPTOS
1. Función continua en un punto. 2. Tipos de discontinuidades. 3. Operaciones con funciones continuas. 4. Teorema de Bolzano. 5. Propiedad de Darboux. 6. Teorema de Weierstrass.

Colegio Vizcaya Matemáticas II
145
CONTINUIDAD 1. CONTINUIDAD
Intuitivamente, podemos entender por función continua, aquella que puede
dibujarse “sin levantar el lápiz del papel”. Pero ya sabemos que las matemáticas exigen algo más de rigor para definir
cada concepto. Si nos preguntamos qué condición o condiciones debe cumplir una función para ser continua en un punto, llegaremos a esta conclusión:
Definición: Una función f(x) es continua en un punto x=a si cumple: 1) existe f(a) ( es decir, a )f(Dom∈ ) 2) existe )x(flim
a→x ( los límites laterales existen y son iguales)
3) )x(flimax→
=f(a) (imagen y límite coinciden)
Observa que cada condición es imprescindible pues, de no cumplirse, se produce una discontinuidad.
a a a ∃ f(a) )x(flim
ax→∃ )a(f)x(flim
ax≠
→
La imagen es lo que ocurre en el punto x=a, el límite es lo que ocurre en un pequeño alrededor. Observa que para que f sea continua en x=a, se pide que “lo que ocurre en “a” sea lo mismo que lo que ocurre a su alrededor”. Lógico, ¿no?.
Diremos que una función es continua en un intervalo si lo es en cada punto de ese intervalo. (Si el intervalo es cerrado [a,b], en los extremos debe ser continua por la derecha en a y por la izquierda en b) Se produce una discontinuidad siempre que se incumple una o más de las tres condiciones anteriores. Dibuja funciones que verifican las siguientes condiciones: 1) no existe f(2) pero sí )x(flim
2→x
2) no existe f(2) ni )x(flim2→x
3) existe f(2) pero no )x(flim2→x
4) existen f(2) y )x(flim2→x
pero son distintos
Observa tus dibujos. Si tuvieras que clasificar las discontinuidades en
evitables e inevitables, ¿cómo lo harías? Fíjate que para “reparar” la discontinuidad, en algunos casos bastaría con modificar un punto, pero en otros , habría que “mover” media función. ¿Dónde está la diferencia?

Colegio Vizcaya Matemáticas II
146
Efectivamente, en el límite. Si el límite existe, pero o no hay imagen o no coincide con él, la discontinuidad se llamará EVITABLE. Pero si no existe límite, haya o no imagen, la discontinuidad se dirá INEVITABLE.
EVITABLE )x(flim∃
a→xpero o ∃ f(a) o es distinto al límite
SALTO FINITO Límites laterales finitos DE PRIMERA ESPECIE
Límites laterales distintos SALTO INFINITO
INEVITABLE alguno de los
)x(flim∃a→x
laterales igual a ∞
DE SEGUNDA ESPECIE No existe alguno de los límites laterales
Ejemplo:
Dada la función f(x) = 4-x4-x2
2 , estudia la continuidad en los puntos
x= 0, 2 y -2. A) En x=0 analizamos las tres condiciones: 1) f(0)= 1 existe imagen
2) 4-x4-x2
lim 20→x= 1 existe límite
3) f(0)= )x(flim0x→
son iguales
luego la función es continua en x=0.
B) En x=2 1) f(2)= 00
no existe, luego la función no es continua en x=2.
Para conocer el tipo de discontinuidad necesitamos saber si existe o no límite.
2) 4-x4-x2
lim 22x→=
00
(indeterminación) = 2)-2)(x+(x
2)-x(2lim
2→x=
2+x2
lim2→x
= 42
= 21
Por tanto, la función presenta una discontinuidad evitable en x=2.
**El factor (x-2) no se podría simplificar al hallar la imagen f(2) porque, en ese caso, x sería exactamente 2 y el factor tomaría el valor 0. Sabemos que no se puede simplificar el 0. Sin embargo, en el límite, x toma valores muy próximos a 0 pero ninguno igual, luego el factor x-2 no es 0 y se puede simplificar. Eso hace que haya límite pero no imagen.**
TIPOS DE DISCONTINUIDAD

Colegio Vizcaya Matemáticas II
147
Actividad
1. Estudia la continuidad en x=0 y x= 2 de la función f(x) = 2x
52 −
Veamos lo que ocurre en una función a trozos:
C) En x=-2 1) f(-2)= 08-
= - ∞ no existe. Veamos el tipo de discontinuidad:
2) 4-x4-x2
lim 2-2→x=
08-
indet. Calculamos los límites laterales:
4-x4-x2
lim 2+-2→x= -0
-8= + ∞
4-x4-x2
lim 2--2→x= +0
-8= - ∞
como son distintos no hay límite. luego en x=-2, la función presenta una discontinuidad inevitable de primera especie de salto infinito. Representa gráficamente el resultado del límite y verifica que se produce un salto infinito.
Ejemplo:
Dada la función f(x) = 3≥x2+x33<xx2
estudia la continuidad en x=1,3.
A) En x=1 , analizamos las tres condiciones: 1) f(1) = 2·1=2 existe imagen 2) 2=x2lim
1→x existe límite
3) f(1) = 2=x2lim1x→
son iguales
f(x) es continua en x=1 B) En x=3, 1) f(3)=3·3+2=11
2) 6=x2lim
11=)2+x3(lim=)x(flim
3→x
+3→x
3→x no existe límite
f(x) presenta en x=3 una discontinuidad inevitable de primera especie de salto finito. ¿Crees que esta función podría tener otros puntos de discontinuidad además de x=3?

Colegio Vizcaya Matemáticas II
148
Suponiendo que tuvieras que analizar en qué puntos no es continua una función de la que conoces su expresión analítica, ¿en qué puntos te fijarías? Razónalo tanto si es una función a trozos como si su expresión es única. Para pensarlo, averigua cuáles son los puntos que pueden incumplir alguna de las tres condiciones de continuidad. Observa, recordando las gráficas correspondientes, que tanto las funciones polinómicas como las exponenciales y trigonométricas simples: f(x)=a x , f(x)=senx y f(x)=cosx, son continuas en todo R, mientras que las logarítmicas f(x)=log a x, lo son en su dominio (0, ∞ ) Actividades 2. Estudia la continuidad de la función:
f(x) = ⎪⎩
⎪⎨
⎧
≥<<
≤−
3x33x1x
1x1x22 en los puntos x=1, x=3, x=0.
3. Estudia la continuidad de las funciones:
a) f(x) = ⎩⎨⎧
≥−<
3xx13xx2
b) f(x) = 4x
x32 −
4. Indica el valor de k para el que la función f(x) = ⎩⎨⎧
≥+<−
2xkx32x1x
sea continua en todo R. 5. Halla el valor de a y b para que la función f(x) sea continua en R.
f(x) = ⎪⎩
⎪⎨
⎧
>+≤≤+
<−
0x 2x0x2- bx
-2x 1ax2
2. OPERACIONES con límites Si f(x) y g(x) son dos funciones continuas en un punto x=a, entonces se verifica que: (f+g)(x), (f-g)(x), (f ·g)(x) y (f/g)(x) también son continuas en x=a. (En el caso (f/g)(x) se requiere que g(a) 0≠ ) Se deduce entonces que la continuidad se mantiene al sumar, restar, multiplicar y dividir funciones continuas. Veamos ahora algunos teoremas relacionados con la continuidad.
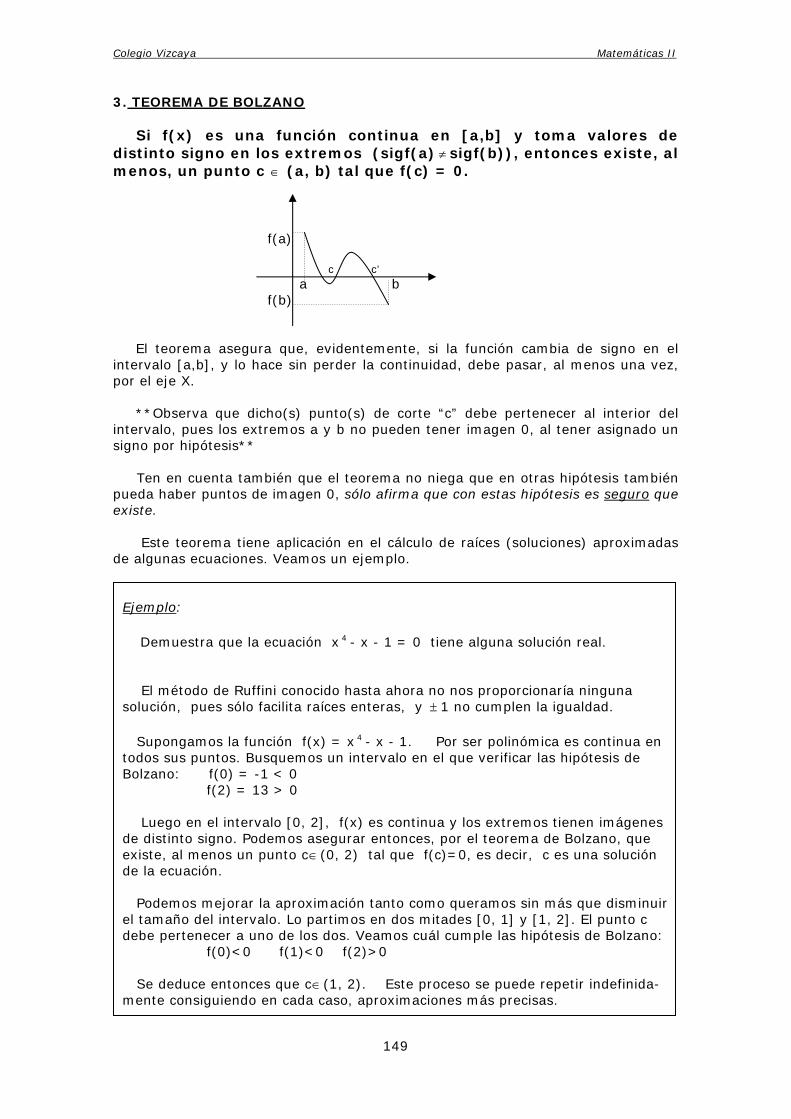
Colegio Vizcaya Matemáticas II
149
3. TEOREMA DE BOLZANO Si f(x) es una función continua en [a,b] y toma valores de distinto signo en los extremos (sigf(a) ≠ sigf(b)), entonces existe, al menos, un punto c ∈ (a, b) tal que f(c) = 0. f(a) c c’ a b f(b) El teorema asegura que, evidentemente, si la función cambia de signo en el intervalo [a,b], y lo hace sin perder la continuidad, debe pasar, al menos una vez, por el eje X. **Observa que dicho(s) punto(s) de corte “c” debe pertenecer al interior del intervalo, pues los extremos a y b no pueden tener imagen 0, al tener asignado un signo por hipótesis** Ten en cuenta también que el teorema no niega que en otras hipótesis también pueda haber puntos de imagen 0, sólo afirma que con estas hipótesis es seguro que existe. Este teorema tiene aplicación en el cálculo de raíces (soluciones) aproximadas de algunas ecuaciones. Veamos un ejemplo. Ejemplo: Demuestra que la ecuación x 4 - x - 1 = 0 tiene alguna solución real. El método de Ruffini conocido hasta ahora no nos proporcionaría ninguna solución, pues sólo facilita raíces enteras, y ± 1 no cumplen la igualdad. Supongamos la función f(x) = x 4 - x - 1. Por ser polinómica es continua en todos sus puntos. Busquemos un intervalo en el que verificar las hipótesis de Bolzano: f(0) = -1 < 0 f(2) = 13 > 0 Luego en el intervalo [0, 2], f(x) es continua y los extremos tienen imágenes de distinto signo. Podemos asegurar entonces, por el teorema de Bolzano, que existe, al menos un punto c∈(0, 2) tal que f(c)=0, es decir, c es una solución de la ecuación. Podemos mejorar la aproximación tanto como queramos sin más que disminuir el tamaño del intervalo. Lo partimos en dos mitades [0, 1] y [1, 2]. El punto c debe pertenecer a uno de los dos. Veamos cuál cumple las hipótesis de Bolzano: f(0)<0 f(1)<0 f(2)>0 Se deduce entonces que c∈(1, 2). Este proceso se puede repetir indefinida- mente consiguiendo en cada caso, aproximaciones más precisas.

Colegio Vizcaya Matemáticas II
150
Actividad 6. La función f(x)=tgx toma valores de distinto signo en los extremos del
intervalo [32
,3
ππ] y, sin embargo, no se anula en dicho intervalo. ¿Se contradice
entonces el teorema de Bolzano? 4. TEOREMA DE DARBOUX (o de los valores intermedios) Si f(x) es una función continua en [a,b] y k es un número real comprendido entre f(a) y f(b), entonces existe, al menos, un punto c ∈ (a, b) tal que f(c) = k. El teorema asegura entonces, que si f(x) es una función continua en el intervalo [a,b], entonces toma, al menos una vez, TODOS los valores comprendidos entre f(a) y f(b). **Observa que en ningún momento se dice que la función toma sólo esos valores** f(a) k a c b f(b) Actividades 7. Dada la función f(x) = 3x2 +x-1, ¿se puede afirmar que alcanza el valor 2 en el intervalo [0,1]?
8. Dada la función f(x) = 2x 3 +x– 2, demuestra que existe algún punto c ∈(-1,2) tal que f(c) = 3. Encuentra un intervalo en el que exista una solución de la ecuación 2x3 + x – 2 = 0.

Colegio Vizcaya Matemáticas II
151
5. TEOREMA DE WEIERSTRASS Si f(x) es una función continua en [a, b], entonces alcanza en dicho intervalo el máximo y el mínimo absolutos, es decir existen dos valores c,d ∈[a, b] tales que f(c) ≤ f(x) ≤ f(d). A d c b a=d b=c Observa que dichos valores máximo y mínimo pueden corresponder tanto a puntos del interior del intervalo, como a los extremos a y b. (Por eso el teorema asegura c,d ∈[a,b] ) Podemos afirmar, como consecuencia del teorema, que si una función es continua en un intervalo [a, b], entonces necesariamente está acotada en dicho intervalo.

Colegio Vizcaya Matemáticas II
152
CONTINUIDAD: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II
1. Estudia la continuidad de f(x) = 1x1x
2
3
−−
en los puntos x=-1, x=0 y x=1.
2. Estudia la continuidad de las funciones:
a) f(x) = ⎪⎩
⎪⎨
⎧
><<+−
≤+
3x33x01x
0x1x2
b) f(x) = ⎪⎩
⎪⎨⎧
≥
<
1x2
1xx1
c) ⎪⎩
⎪⎨⎧
≥
<=
0x4
0xx3
)x(fx
d) ⎪⎩
⎪⎨⎧
>
≤=
0xx
0xx)x(f
*** Si puedes, dibuja las funciones para confirmar el resultado***
3. ¿Existe algún valor de k para el que la función f(x) = ⎩⎨⎧
=≠
0xk0xx/5
sea continua?
4. Estudia la continuidad de la función f(x) = ⎩⎨⎧
∉∈
Zx0Zx1
5. Demuestra que las gráficas de las funciones f(x) = x 3 y g(x) = x+1 se
cortan, al menos, en un punto. Halla un intervalo en el que se corten dichas funciones.
6. Estudia la continuidad de la función f(x) = x
|1x| − en el punto x=1.
7. Estudia la continuidad de la función f(x) = ⎩⎨⎧
≥+<−
1x 33x-1x |1x| 2
Represéntala gráficamente.
***Indica siempre el tipo de discontinuidad, si ésta se produce***
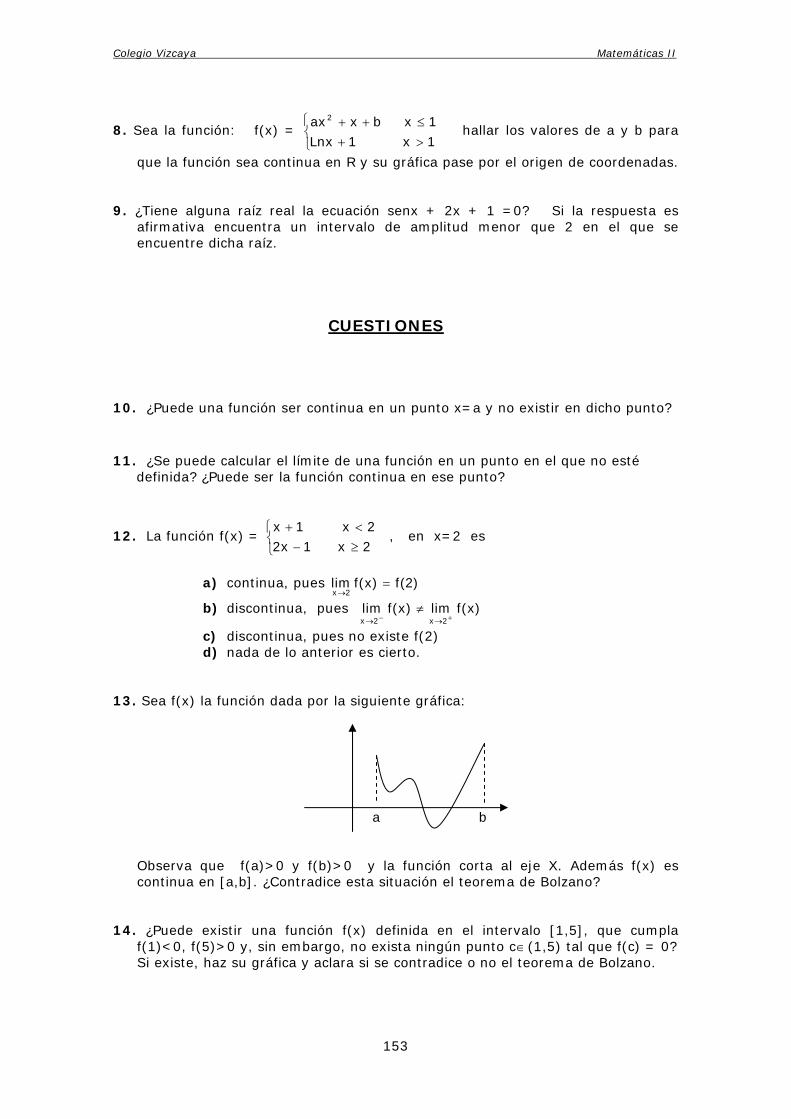
Colegio Vizcaya Matemáticas II
153
8. Sea la función: f(x) = ⎩⎨⎧
>+≤++
1x 1Lnx1x bxax2
hallar los valores de a y b para
que la función sea continua en R y su gráfica pase por el origen de coordenadas. 9. ¿Tiene alguna raíz real la ecuación senx + 2x + 1 =0? Si la respuesta es
afirmativa encuentra un intervalo de amplitud menor que 2 en el que se encuentre dicha raíz.
CUESTIONES 10. ¿Puede una función ser continua en un punto x=a y no existir en dicho punto? 11. ¿Se puede calcular el límite de una función en un punto en el que no esté definida? ¿Puede ser la función continua en ese punto?
12. La función f(x) = ⎩⎨⎧
≥−<+2x1x22x1x
, en x=2 es
a) continua, pues )2(f)x(flim
2x=
→
b) discontinua, pues )x(flim)x(flim2x2x +→−→
≠
c) discontinua, pues no existe f(2) d) nada de lo anterior es cierto.
13. Sea f(x) la función dada por la siguiente gráfica: a b
Observa que f(a)>0 y f(b)>0 y la función corta al eje X. Además f(x) es continua en [a,b]. ¿Contradice esta situación el teorema de Bolzano?
14. ¿Puede existir una función f(x) definida en el intervalo [1,5], que cumpla f(1)<0, f(5)>0 y, sin embargo, no exista ningún punto c∈(1,5) tal que f(c) = 0? Si existe, haz su gráfica y aclara si se contradice o no el teorema de Bolzano.

Colegio Vizcaya Matemáticas II
154
15. Sea la función f(x) = x1
definida en el intervalo (0,3]. Razona:
a) ¿Es continua en dicho intervalo? b) ¿Está acotada inferiormente en (0,3] c) ¿Tiene máximo absoluto en (0,3] d) ¿Se contradice el teorema de Weierstrass? 16. Si una función no está definida en x=1, ¿puede ocurrir que ?2)x(flim
1x=
→
¿Puede ser continua la función en dicho punto x=1?
Colegio Vizcaya Matemáticas II
155
UNIDAD DIDÁCTICA 9
DERIVADAS 2º BACHILLER
Colegio Vizcaya Matemáticas II
156
OBJETIVOS DIDÁCTICOS 1. Interpretar geométricamente el concepto de derivada de una función en un
punto y aplicarlo al cálculo de rectas tangentes a una curva en un punto. 2. Calcular la derivada tanto de funciones elementales como de funciones
compuestas. 3. Determinar la derivabilidad de una función dada por su expresión gráfica o
analítica a través del concepto o del cálculo de las derivadas laterales en un punto.
4. Conocer la relación existente entre derivabilidad y continuidad. CONCEPTOS
1. Derivada de una función en un punto: concepto, definición e interpretación
geométrica. 2. Función derivada. Derivadas laterales. Derivadas sucesivas. 3. Operaciones con funciones derivadas. 4. Cálculo de derivadas. 5. Ecuación de la recta tangente a una curva en un punto. 6. Funciones no derivables. Relación continuidad-derivabilidad.
Colegio Vizcaya Matemáticas II
157
DERIVADAS 1. INTRODUCCIÓN: El estudio de las funciones y curvas dio lugar al nacimiento de una nueva rama de las matemáticas: el Cálculo Infinitesimal o Análisis Matemático. Su origen estuvo relacionado con la resolución de dos problemas: el movimiento no uniforme y el cálculo de la recta tangente a una curva en un punto cualquiera de ella (nos centraremos en este último). Ambos problemas fueron resueltos separadamente por el matemático inglés Isaac Newton (1642-1727) y por el matemático y filósofo alemán Gottfried Wilhelm Leibniz (1646-1716), que protagonizaron una agria disputa por la paternidad del descubrimiento, que hoy en día se otorga a ambos. Newton descubrió el método de las tangentes (lo que hoy se conoce como derivación) entre 1665 y 1666 pero lo publicó en 1693, mientras que Leibniz, que lo descubrió más tarde, entre 1675 y 1677, lo publicó antes, en 1684. Posteriormente, matemáticos como Euler, Gauss y Cauchy desarrollaron el Cálculo Infinitesimal hasta convertirlo en una de las ramas más potentes de las matemáticas. El problema de la tangente a una curva en un punto, es decir, la dirección del movimiento de un objeto a lo largo de la curva en cada instante, es el eje sobre el que se asientan numerosos conceptos matemáticos y físicos como la velocidad de un móvil, las trayectorias de los satélites o el estudio de los extremos de una función de cara a su optimización. Empezaremos por revisar qué se entiende por recta tangente a una curva en un punto. Si afirmamos que se trata de “la recta que corta a la curva en ese punto”, probablemente estarás de acuerdo, porque coincide con la idea que ya tienes formada sobre dicha recta. Pero recuerda que para identificar el concepto es necesario precisar bien las palabras. Esta recta corta a la curva en un punto y no es tangente en él. Sin embargo, en el siguiente gráfico se podría asegurar que la recta es tangente en el punto P, a pesar de cortar a la curva en más de un punto. P De hecho, puede ser tangente en más de un punto a la vez:
Colegio Vizcaya Matemáticas II
158
Ya sabes que el leguaje matemático se caracteriza por su capacidad para definir con el máximo rigor y precisión cualquier concepto. Aunque a veces, como en este caso, la tarea resulta compleja. (***Las matemáticas son precisas, concisas e incisas y no confusas, profusas ni difusas*** ¿Qué te parece esta frase?) La recta tangente va a ser definida como una recta límite de otras rectas. Observa el dibujo:
P1
P2
Pn
t P
Si trazamos una secante que pase por el punto P y otro cualquiera 1P de la curva y movemos 1P acercándolo a P, la recta secante cambia de posición. De manera que a medida que 1P tiende a P, la secante tiende a estabilizarse en torno a una recta límite que será la recta tangente. (Hacer el límite cuando 1P P→ permite que siempre dispongamos de dos puntos, por muy próximos que estén, para trazar la recta secante. Pues 1P siempre será distinto de P). Ya podemos hacer la definición de recta tangente. Utilizaremos la ecuación punto-pendiente por ser éstos los datos de que disponemos. Definición: Llamamos recta tangente a la curva f(x) en el punto P a la recta que pasa por el punto P y tiene por pendiente, el límite de las pendientes de las secantes trazadas por P y otro punto cualquiera 1P de la curva, cuando 1P tiende a P. La pendiente de las rectas P 1P , P 2P … PPn se va modificando y, en el límite, se convierte en la pendiente de la tangente. Este concepto será lo que llamemos derivada. Por tanto, entenderemos por derivada de una función f(x) en un punto P, la pendiente de la recta tangente a esa curva en dicho punto P. Trataremos de escribir matemáticamente todos estos conceptos.
Colegio Vizcaya Matemáticas II
159
Designamos unas coordenadas a P y P1: P (a,f(a)) y P1 (a+h, f(a+h))
Secante PP 1
f(a+h) P1 f(a+h)-f(a) P
f(a) h
a a+h
Escribimos la ecuación de la tangente en forma punto-pendiente:
Punto P(a, f(a)) Pendiente )m(Limm sec
PPtg
1 →=
Para hallar m tg , calculamos primero las pendientes de las secantes. Para ello
consideramos el vector →
1PP :
→
1PP = (a+h-a, f(a+h)-f(a)) = (h, f(a+h)-f(a))
h
f(a)-)h+a(flim=)m(lim=m
h)a(f-)h+a(f
=vv
=m0hsecP1P
tg1
2sec →→
⇒
Intenta razonar por qué cambiamos P 1 → P, por h→ 0
Luego la ecuación de la recta tangente a la curva f(x) en el punto x=a será:
Definición: Se llama derivada de f(x) en el punto x=a, y se escribe )a('f , al siguiente límite:
que representa geométricamente, la pendiente de la recta tangente a la curva f(x) en ese punto x=a.
)ax(m)a(fy tg −⋅=−
)a-x(h
f(a)-)h+a(flim=)a(f-y
0h→
h)a(f-)h+a(f
lim=)a('f0h→

Colegio Vizcaya Matemáticas II
160
Ejemplo: Calcula la derivada (pendiente de la tangente) de la función f(x)= x 2 en el punto x=3.
Sabemos que f’(3)= h
f(3)-)h+3(flim
0→h=
h9-)h+3(
lim2
0→h=
h9-h+h6+9
lim2
0→h=
= h
)h+6(hlim
0→h= )h+6(lim
0→h= 6
De esta manera, podríamos calcular la pendiente de la tangente en cada punto realizando el límite correspondiente. Pero si usamos un punto genérico x calcularemos todas esas pendientes en un único límite.
f’(x) = h
f(x)-)h+x(flim
0→h=
hx-)h+x(
lim22
0→h=
hx-h+xh2+x
lim222
0→h=
h)h+x2(h
lim0→h
=
= )h+x2(lim0→h
= 2x
Por supuesto, si f’(x) = 2x, entonces f’(3) = 6, f’(-1)=-2, f’(7)=14 …
Actividades
1. A partir de la definición de derivada, calcula f’(1) y f’(0), siendo f(x)= 2x 2 -1. Calcula, de la misma manera, la expresión general de f’(x).
2. Calcula, a través de la definición, f’(0) y f’(2) siendo
f(x) = 0≥xx20<x1+x2
2. DERIVADAS LATERALES. FUNCIÓN DERIVADA Hemos visto que la derivada de una función f en un punto x=a, si existe, es
f’(a) y viene dada por:
Si f’ (a) es un número real, entonces f es derivable en a. En caso contrario, si no existe el límite, la función no es derivable en a. Sabemos que no existe límite cuando son distintos los límites laterales. Lo que nos lleva a definir las derivadas laterales.
a) Derivada lateral por la izquierda de f en x=a:
hf(a)-)h+a(f
lim=)a('f0h→
hf(a)-)h+a(f
lim=)a('f-0→h
-

Colegio Vizcaya Matemáticas II
161
Gráficamente indica que se elige P1 a la izquierda de P, por lo que h será siempre negativo y tanto más pequeño cuanto más se acerque P1 a P.
b) Derivada lateral por la derecha de f en x=a:
Igualmente, la derivada por la derecha indica la elección de P1 a la derecha de P. Diremos que f es derivable en x=a si existen las derivadas laterales y coinciden Actividad
3. Estudia la derivabilidad de la función f(x) = ⎩⎨⎧
≥
<+
1xx2
1x3x2
Halla f’(x).
Podemos hallar la derivada en un punto determinado x=a. Pero si queremos calcular la derivada de f en varios puntos, será preferible calcular f’ en un punto genérico x, y luego particularizar a los puntos deseados.
hf(a)-)h+a(f
lim=)a('f+0h
+
→
)a('f)a('f)a('f +− ==
Ejemplo:
Sea ⎩⎨⎧
<≥
=2xx2xx
)x(f2
¿Existe )2('f ?
( ) 4=h+4lim=h
)h+4(hlim=
hh+h4
lim
=h
4-h+h4+4lim=
h4-)h+2(
lim=h
f(2)-)h+2(flim=)2('f
+0h+0h
2
+0h
2
+0h
2
+0h+0h
+
→→→
→→→
===+
=+
=→→→
−--0h-0h-0h 02-
h2-h
limh
4-h2lim
hf(2)-)h2(f
lim)2('f +∞
Por ser distintas las derivadas laterales, f(x) no es derivable en x=2. Dibuja la función y comprueba los resultados obtenidos.

Colegio Vizcaya Matemáticas II
162
Se deduce, por tanto, que f’(x) es, a su vez, una función que asocia cada punto x con la pendiente de su tangente. Si f es derivable en un intervalo de R, la función derivada de f es la que a cada x del intervalo le hace corresponder la derivada de f en dicho punto. Esta función se designa por: Una función f es derivable en un intervalo si lo es en cada punto del intervalo.
1.
Si agrupamos las funciones en familias: potenciales, exponenciales, logarítmicas, trigonométricas… y calculamos la derivada de cada una en un punto genérico x, llegaremos a las fórmulas que aparecen a continuación y que, una vez aprendidas, evitarán que tengamos que realizar el límite en cada caso concreto.
hf(x)-)h+x(f
lim=)x('f0h→
Ejemplo:
Sea f(x) = x5
, calcular ( ) ( )2' f y 1' f :
( )
45
25
)2('f
515
15
)1('f
x5
)x('fx5
xx5
x)0x(5
x)hx(5
Limhx)hx(
h5Lim
hx)hx(
h5
Limh
x)hx(h5x5x5
Lim
hx)hx(
hx5x5
Limh
x5
hx5
Limh
)x(f)hx(fLim)x('f
2
2
22
0h0h0h0h
oh0h0h
−=
−=
−=−
=−
=
−=⇒
−=
⋅−
=⋅+
−
=⎟⎟⎠
⎞⎜⎜⎝
⎛⋅+
−=⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅⋅+
−=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛⋅+
−
=⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛⋅+−−
=⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛⋅++⋅−
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛−
+=⎟⎠
⎞⎜⎝
⎛ −+=
→→→→
→→→

Colegio Vizcaya Matemáticas II
163
3. DERIVADAS DE LAS FUNCIONES ELEMENTALES
FUNCIONES FUNCIÓN SIMPLE FUNCIÓN COMPUESTA EJEMPLOS
F. Constante y = k y’ = 0
F. Identidad y = x y’ = 1
F. Potencial y = x a y’ =
y = f a y’ = a · f 1-a · f '
y= (x 73 )3+
y’ = 7·(x3 +3) 6 · 3x2
F. Exponencial (caso particular a = e)
y = a x y’ = y = e x y’ =
y = a f y’ = a f · Lna · f ' y = e f
y’ = e f · f '
y = 5 1+x
y’ = 5 1+x · Ln5 · 21
-)1+x(
21
y = e2x2
y’ = e2x2 · 4x
F. Logarítmica (caso particular a = e)
y = log xa y’ = y = Lnx y’ =
y = log fa
y’ = Lna·ff '
y = Lnf
y’ = ff '
y = log )2+x4(3
y’ = 3Ln·)2+x4(
4
y = Ln 3 5+x
y’ = 5+x
5+x
33Ln·3
= Ln3
F. Potencial- Ex ponencial
y = f g y’= g· f 1g− · f ' + f g · Lnf · g’
y= x Lnx
y’ = Lnx· x 1Lnx − + x Lnx ·Lnx· x1
F. Seno y = sen x y’ =
y = sen f y’ = cos f · f '
y = sen (2 x +3) y’ = cos (2 x +3)· 2 x · Ln2
F. Coseno y = cos x y’ =
y = cos f y’ = - sen f · f '
y= cos( 6x+3) y’ = - sen(6x+3) · 6
F. Tangente y = tg x y’ =
y = tg f
y’ = fcos
f2
'
y = tg (2x)
y’ = )x2(cos
22
F. Cotangente y = cotg x y’ =
y = cotg f
y’ = -fsen
f2
'
y = cotg(senx)
y’ = -)senx(sen
xcos2
F. Arco seno y = arcsen x y’ =
y = arcsen f
y’ = 2
'
f1
f
−
y = arcsen(e x )
y’ = x2
x
e1
e
−
F. Arco coseno y = arccos x y’ =
y = arccos f
y’ = -2
'
f1
f
−
y = arccos(7x+1)
y’ = -2)1x7(1
7
+−
F. Arco tangente y = arctg x y’ =
y = arctg f
y’ = 2
'
f+1f
y = arctg (senx)
y’ = xsen+1
xcos2
Colegio Vizcaya Matemáticas II
164
4. DERIVADAS SUCESIVAS 4. OPERACIONES CON DERIVADAS
a) Derivada de la suma
( ) (x) ' g(x)' f(x) ' gf ±=± b) Derivada del producto
( ) (x) ' g(x) f(x) g(x)' f(x) ' gf ⋅+⋅=⋅ c) Derivada del producto de una función por un escalar
( ) (x)' fk(x) ' fk ⋅=⋅ d) Derivada del cociente
)x(g
(x)' gf(x)-g(x)(x)' f(x) '
gf
2
⋅⋅=⎟⎟
⎠
⎞⎜⎜⎝
⎛
e) Derivada de la composición (Regla de la cadena)
(x)' g))x(g(' f)x()'fog( ⋅=
5. DERIVADAS SUCESIVAS
Sabemos que f es derivable en un intervalo si lo es en cada punto del intervalo. Por lo tanto podemos hallar su función derivada, )x('f . Como 'f (x) es a su vez una función, puede ser de nuevo derivable, y podremos hallar su derivada
''f)''f( = , llamada derivada de segundo orden o derivada segunda y así sucesivamente, siempre y cuando la derivada obtenida sea derivable. De esta manera podemos calcular las derivadas sucesivas de la función f:
,...f...,f,f,'''f,''f,'f )nVIV
La función simple es un caso particular de la función compuesta cuando f(x) =x. Completa la tabla basándote en las fórmulas de la función compuesta.
Ejemplo: 2senx)x(f = , calcular su derivada. Aplicamos la regla de la cadena
donde senxf(x) y ,x)x(g 2 == . Se tiene:
( ) x2cosx ' senx 22 ⋅=
Colegio Vizcaya Matemáticas II
165
Actividades 4. Calcula las siguientes derivadas:
a) 7x4)x(f = b) 5x2)x(f −= c) 6)1x2()x(f +=
d) 31
x4)x(f−
= e) 21
3 xx)x(f ⋅= f) 531
xx3)x(f−
=
g) 2x
x5)x(f = h) 3
12 )1x()x(f −= i)
xx
)x(f =
5. Calcula las siguientes derivadas:
a) x4e)x(f = b) 2x3e)x(f −= c) 1x2
2)x(f +=
d) xx 53)x(f ⋅= e) 3x
x
x36
x27)x(f
3
2
+
−=
6. Calcula las siguientes derivadas:
a) x
Lnx)x(f = b)
Lnxe
)x(fx
=
c) 7x5 2
2)x(f −= d) 1x2x3
e)x(f +=
e) ( )7xlog
3)x(f
23
6x5
+=
−
f) ( ) ( )2x5ln3 e7x5x2)x(f −⋅+−=
7. Calcula las siguientes derivadas:
a) ( )x4sen)x(f = b) senx4)x(f =
c) ⎟⎠
⎞⎜⎝
⎛=4x
sen)x(f d) ( )4xtg)x(f =
e) )2x5(cos)x(f 3 += f) )2cos()x(f 1x3 −=
g) )2x5x2(arcsen)x(f 2 +−= h) )x2arccos(ln)x(f = i) ))1x3(sen(arctg)x(f −= j) ))1x3((logtg)x(f 3 −=
8. Halla )0(f v si xe)x(f =
Ejemplo:
Hallar 3)n x)x(fsiendo),x(f =
2x3)x('f = x6)x(''f = 6)x('''f =
0)x('f v = 4npara0)x(f )n ≥=⇒
Colegio Vizcaya Matemáticas II
166
Actividad 9. Dada la función f(x) = -3x 234 x2+x+ -x-5 halla: f(0), f’(1), f’’(-1), f’’’(2), f IV (0) y f V (1). 6. ECUACIÓN DE LA RECTA TANGENTE
La ecuación de la recta tangente a la curva y = f (x) en el punto x = a, en su forma punto-pendiente, es:
Ya que la pendiente de la tangente en ese punto coincide con la derivada.
Actividades
10. Halla la ecuación de la recta tangente a la curva y=-x 2 +3x-1 en el punto de abscisa x= 2. 11. a) ¿En qué punto la derivada de la función y=x 2 - 2x es igual a 2? b) ¿En qué punto la recta tangente a la función anterior es paralela al eje X? ¿Y paralela a la recta y = 4x+1? 12. La ecuación de la recta tangente a una función f(x) en el punto x=2 es
x- 2y+3=0. Halla f(2) y f’(2).
13. Halla la ecuación de la recta tangente en el punto x = - 2 a la función 5x3)x(f 3 −= .
14. Halla la ecuación de la recta tangente a la curva 5x7x4)x(f 3 −+−= en el punto x = - 3.
a)-(x (a)' f)a(fy ⋅=−
Ejemplo:
Halla la ecuación de la recta tangente a la curva 5x3)x(f 2 −= en el punto x = 2:
m1226(2) ' f6x(x) ' f ==⋅=⇒=
7512523)2(f 2 =−=−⋅= Luego la ecuación será: )2x(127y −=−
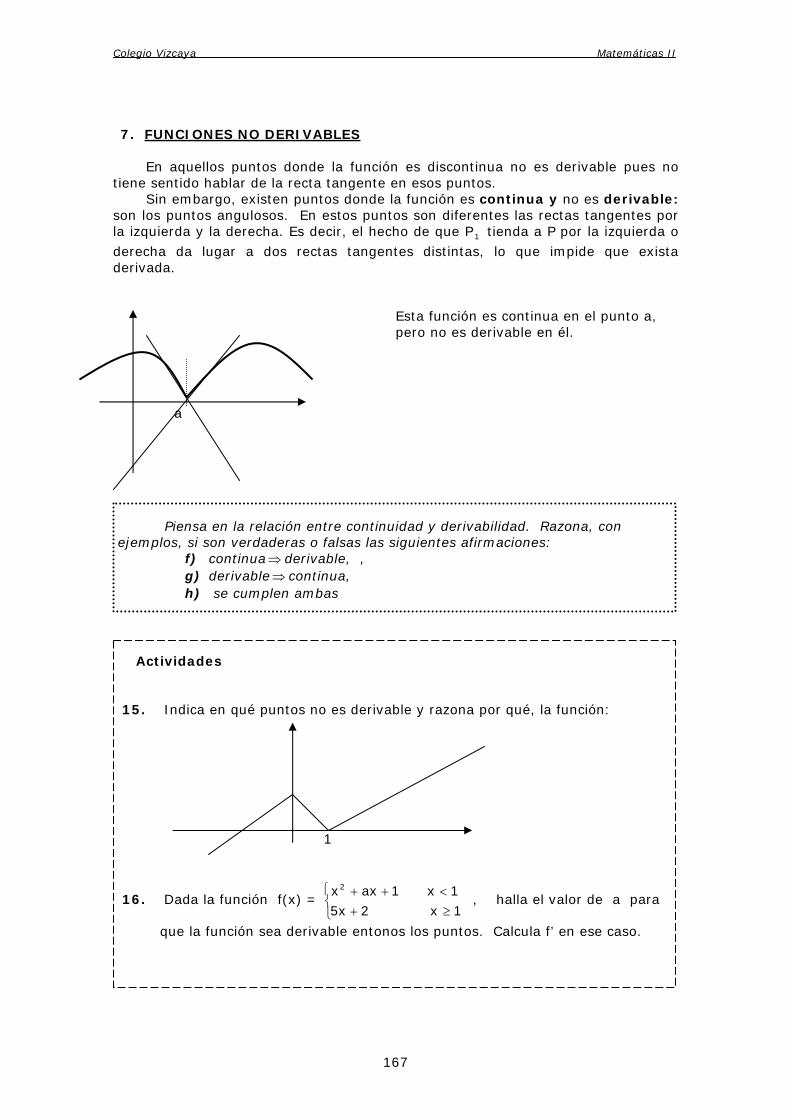
Colegio Vizcaya Matemáticas II
167
7. FUNCIONES NO DERIVABLES
En aquellos puntos donde la función es discontinua no es derivable pues no tiene sentido hablar de la recta tangente en esos puntos. Sin embargo, existen puntos donde la función es continua y no es derivable: son los puntos angulosos. En estos puntos son diferentes las rectas tangentes por la izquierda y la derecha. Es decir, el hecho de que P1 tienda a P por la izquierda o derecha da lugar a dos rectas tangentes distintas, lo que impide que exista derivada. Esta función es continua en el punto a, pero no es derivable en él. a Piensa en la relación entre continuidad y derivabilidad. Razona, con ejemplos, si son verdaderas o falsas las siguientes afirmaciones:
f) continua⇒ derivable, , g) derivable⇒ continua, h) se cumplen ambas
Actividades 15. Indica en qué puntos no es derivable y razona por qué, la función:
1
16. Dada la función f(x) = ⎩⎨⎧
≥+<++
1x2x51x1axx2
, halla el valor de a para
que la función sea derivable entonos los puntos. Calcula f’ en ese caso.

Colegio Vizcaya Matemáticas II
168
Vamos a demostrar a continuación la siguiente proposición: Si una función f(x) es derivable en un punto, entonces es continua en ese punto. Demostración: Si f(x) es continua en un punto x=a, entonces existe y es finito el límite:
f’(a) = h
)a(f)ha(flim
0h
−+→
Si realizamos el cambio x=a+h tenemos:
f’(a) = h
)a(f)ha(flim
0h
−+→
= ax
)a(f)x(flim
ax −−
→ =
)ax(lim
))a(f)x(f(lim
ax
ax
−
−
→
→ ⇒
h→ 0 ⇒ x a→
⇒ ))a(f)x(f(lim
ax−
→ = f’(a)· )ax(lim
ax−
→ ⇒ ))a(f)x(f(lim
ax−
→ = f’(a) · 0 ⇒
⇒ ))a(f)x(f(lim
ax−
→=0 ⇒ )x(flim
ax→ = )a(flim
ax→ ⇒ )x(flim
ax→=f(a) lo que
demuestra que f(x) es continua en x=a al coincidir su imagen y su límite.

Colegio Vizcaya Matemáticas II
169
DERIVADAS: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II 1. Halla la pendiente de la tangente a la curva y = 2x2 - x + 3 en el punto x=-1.
2. Dada la función y = 3x - 2 halla, mediante la definición, f’(x).
3. Escribe las ecuaciones de las rectas tangentes a la curva y=x1
que son
paralelas a la recta x+4y=0.
4. Indica en estas funciones los valores de x en los que f’ es positiva o negativa. Indica también en qué valores de x, f’ es 0.
46
8
2
6 82 4−4 −2−8 −6−2
−4
−6
Y
X
¿Cómo es la función f en los valores de x donde f’ es positiva? ¿Y negativa? ¿Cómo se llaman los puntos donde f’ es 0?
5. Calcula las siguientes derivadas:
a) 32-
4 )3+x(=)x(f b) x=)x(f c) 43
21-
31
xxx=)x(f
d) ( )
x
x3-x=)x(f
3-2
e) 3
2
x
3x=)x(f
- f)
( )( )3
2
2+x
2-x=)x(f
6. ¿En qué punto de la parábola y = x 2 -x la tangente es paralela a la bisectriz
del segundo cuadrante?
7. Dada la función y= 2x 2 +ax+b, halla a y b para que la función tenga una tangente de pendiente -6 en el punto (1,4).
8. Comprueba que la función y = |x| no es derivable en el punto x=0, hallando las derivadas laterales.
9. a) Hallar )0(f v si xe)x(f =
b) Halla )1(f vI − si ( )1x32)x(f x +⋅=
c) Halla )x(f )n si )x3(log)x(f 2=

Colegio Vizcaya Matemáticas II
170
10. Halla la parábola y= ax c+bx+2 , sabiendo que pasa por A(5,-2) y que es
tangente a la recta y= 2x+1 en el punto B(2,5).
11. Calcula las siguientes derivadas:
1. 7-2x52=)x(f 2. 1+x2x3
e=)x(f 3. ( )7+xlog3
=)x(f 23
6-x5
4. ( ) ( )2-x5Ln3 e7x5-x2)x(f += 5. 6-2x5log
2=)x(f
6. 2
2
x-1
x+1Ln=)x(f 7. xLnx=)x(f
8. ( )[ ]4x5x2Ln=)x(f 23 -- 9. 1+e1e
=)x(f x
x -
10. x
x
e+1e
Ln=)x(f 11. )x5(Ln4 4))x5(Ln(log)x(f ·=
12. 33
7x3
xlog3x7
=)x(f-
13. f(x) = (2x-3+8x 2 )·(3x-5x 2 -4x 3 )
14. x7
x2
27
=)x(f
12. Calcula las siguientes derivadas:
1. ⎟⎟⎠
⎞⎜⎜⎝
⎛
+=
x
x
e1e
Ln)x(f 2. ( )3x5log)x(f 23 -=
3. xee=)x(f 4.
xxe=)x(f
5. xxx=)x(f 6. 1x
1x
a)x(f −+
=
7. 2x2sen=)x(f 8. ⎟⎠
⎞⎜⎝
⎛−
=x1
xtg)x(f 2
9. xcos1
senx1Ln)x(f
−+
= 10. ⎟⎠
⎞⎜⎝
⎛+
=x11-x
arcsen)x(f 2
11. ax
arctga1
=)x(f 12. 1x
xgcot)x(f
−=
13. senxa=)x(f 14. x2
arccosx)x(f 2 ⋅=
15. ( ) xarctgx)x(f = 16. 32 )1+x2(sen3=)x(f
17. ( )( )LnxcosLn)x(f 3= 18. ⎟⎠
⎞⎜⎝
⎛=x
senxsen)x(f
19. ( ) 4senx2 1x)x(f ⎥⎦⎤
⎢⎣⎡ −= 20. ))x2sen(sen(sen=)x(f

Colegio Vizcaya Matemáticas II
171
13. Mediante la definición, halla la derivada de las siguientes funciones en los
puntos que se indican:
a) 2x7=)x(f -6 en x = 1
b) 2x3
=)x(f en x = 2
14. Calcula la ecuación de la recta tangente a cada una de las siguientes funciones,
en los puntos que se indican:
a) x3=)x(f - 4x 2 en x = 1, x = 2 b) xcos=)x(f en x = π c) 3+x=)x(f 4 en x = - 4 d) 3x2=)x(f -x+3 en x = 0, x = 1 e) f(x) = Lnx en x = e
15. Estudia la continuidad y derivabilidad de las siguientes funciones:
0xx
0xx)x(f )a
⎪⎩
⎪⎨⎧
>=
≤
⎩⎨⎧ >
=3x5x3x3x
)x(f )b≤
⎩⎨⎧
<=
2xx2xx
)x(f )c2 ≥
d) f(x) =
⎪⎪⎩
⎪⎪⎨
⎧
≥
<≤+
<+
3x 2
3x0 xx2
0x xx2
x
3
2
16. Halla )1(f vI − si x2)x(f =
17. Calcula las siguientes derivadas:
1) 32
4 )3x()x(f−
+= 2) x)x(f = 3) 43
21
31
xxx)x(f−
=
4) ( )
x
x3x)x(f
32 −−
= 5) 3
2
x
3x)x(f
−= 6)
( )( )3
2
2x
2x)x(f
+
−=
7) 6x)x(f = 8) 5x
3)x(f = 9)
3 x
3)x(f =
10) ( )423 4xx)x(f −⋅= 11) ( )42 4x)x(f += 12) 3 3 1x)x(f +=
13)( )525 3xx
1)x(f
+−= 14)
41x
)x(f2 −
= 15) 5x4
3)x(f
2 +=

Colegio Vizcaya Matemáticas II
172
16) x3
4)x(f = 17) x23)x(f ⋅= 18) 2ee)x(f xx2 2
−−=
19)22 xx 32)x(f ⋅= 20)
4e
)x(fx2−
= 21) ( )3x2 1e)x(f +=
22) ( )7xlog)x(f 23 += 23) ( )53
5 x43log)x(f −= 24) ( )2eLn)x(f x += 25) ( ) ( )2x1x2Ln)x(f 22 −⋅−= 26) ( )1xLn)x(f 2 += 18. Calcula f’(x) utilizando la definición de derivada siendo:
1. f(x) = ⎩⎨⎧
≥+
<−
1x 23x
1x 1x22
19. Si y = 3x+1 es la ecuación de la recta tangente a la función f(x) en el punto x = 0, halla f(0) y f’(0).
20. Estudia la continuidad y derivabilidad de las funciones:
f(x)=⎪⎩
⎪⎨
⎧
≥
<≤<
2x 2x
2x0 10x e
3
x
f(x)=⎩⎨⎧
≥
<−
3x x
3x |2x|2
f(x) = |x-1|+|x+2|
21. Halla el valor de a y b para que f(x) sea derivable siendo:
f(x) = ⎪⎩
⎪⎨
⎧
≥+
<≤+<+
0x 23x
0x1- bax-1x ax2
2
CUESTIONES 1. Representa gráficamente una función que cumpla las siguientes condiciones: a) ∞=)x(flim
∞-→x b) ∞=)x(flim
∞→x
b) su derivada es 0 en el punto (-2,1) c) su derivada es 1 en el punto (0,1) d) es continua en todos los puntos salvo en x=2 donde presenta una discontinuidad evitable.
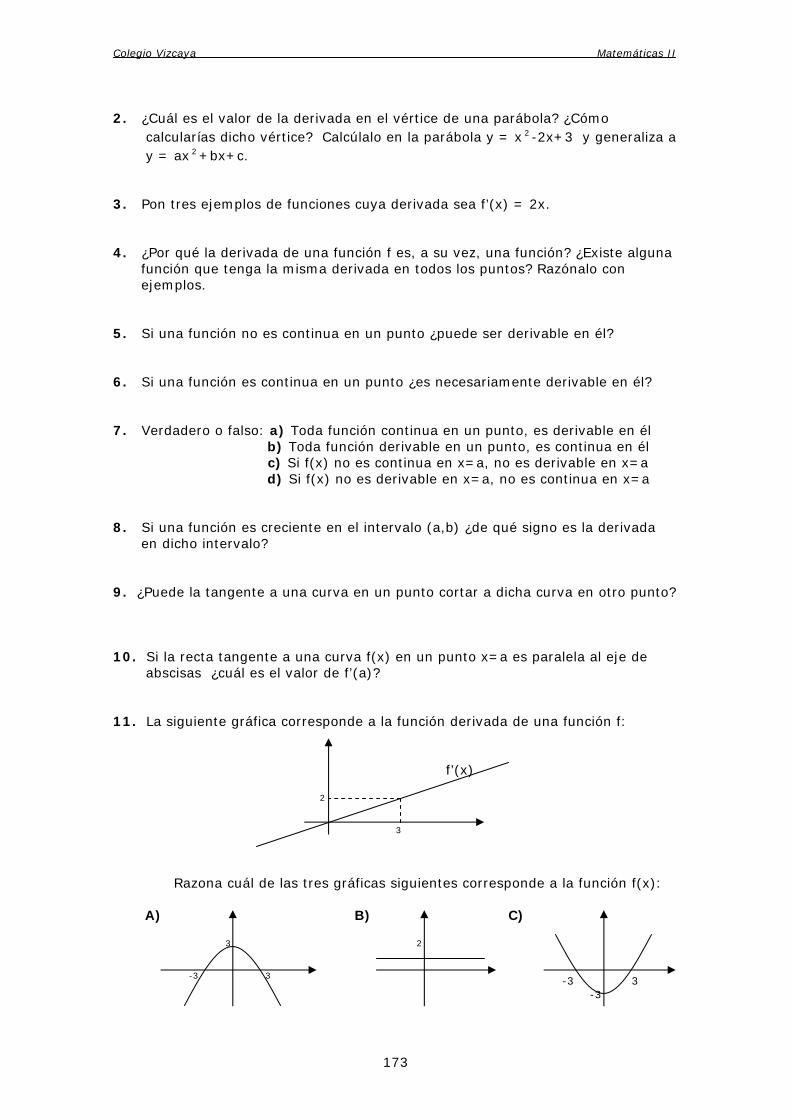
Colegio Vizcaya Matemáticas II
173
2. ¿Cuál es el valor de la derivada en el vértice de una parábola? ¿Cómo calcularías dicho vértice? Calcúlalo en la parábola y = x 2 -2x+3 y generaliza a y = ax2 +bx+c. 3. Pon tres ejemplos de funciones cuya derivada sea f’(x) = 2x. 4. ¿Por qué la derivada de una función f es, a su vez, una función? ¿Existe alguna función que tenga la misma derivada en todos los puntos? Razónalo con ejemplos. 5. Si una función no es continua en un punto ¿puede ser derivable en él? 6. Si una función es continua en un punto ¿es necesariamente derivable en él? 7. Verdadero o falso: a) Toda función continua en un punto, es derivable en él b) Toda función derivable en un punto, es continua en él c) Si f(x) no es continua en x=a, no es derivable en x=a d) Si f(x) no es derivable en x=a, no es continua en x=a 8. Si una función es creciente en el intervalo (a,b) ¿de qué signo es la derivada en dicho intervalo? 9. ¿Puede la tangente a una curva en un punto cortar a dicha curva en otro punto? 10. Si la recta tangente a una curva f(x) en un punto x=a es paralela al eje de abscisas ¿cuál es el valor de f’(a)? 11. La siguiente gráfica corresponde a la función derivada de una función f:
f’(x)
2
3
Razona cuál de las tres gráficas siguientes corresponde a la función f(x): A) B) C)
3 2
-3 3 -3 3 -3

Colegio Vizcaya Matemáticas II
174
12. La derivada de la función y=f(x) en el punto x=a es:
a) h
)x(f)hx(flim
0h
−+→
b) ax
)a(f)x(flim
ax −−
→
c) h
)a(f)ha(f −+
d) ninguna de las expresiones anteriores 13. Razona cuál de las siguientes afirmaciones es cierta: a) si f es continua en x=a, entonces es derivable en x=a b) si f es derivable en x=a, entonces es continua en x=a c) si f es derivable en x=a, entonces es creciente en x=a d) si f no es derivable en x=a, entonces no es continua en x=a. 14. Si la función f(x) cumple f’(a)= -2, puede asegurarse que: a) f es continua en a b) f es creciente en a c) f’ es constante d) nada de lo anterior. 15. Si f es una función polinómica de tercer grado, se puede asegurar que: a) f’’’(x)=0 b) f iv (x)=0 c) f’’’ es de primer grado d) f iv (x)=k ≠ 0 16. La función f(x) = |x|: a) no es derivable en x=0 por no ser continua b) es continua en x=0, pero no derivable en x=0 c) es derivable en x=0, pero no continua en x=0 d) tiene derivada nula en x=0.
17. Calcula en cada una de las siguientes funciones las derivadas que se indican:
f(x)
2 Calcula )2(f ′ -2 y = - x
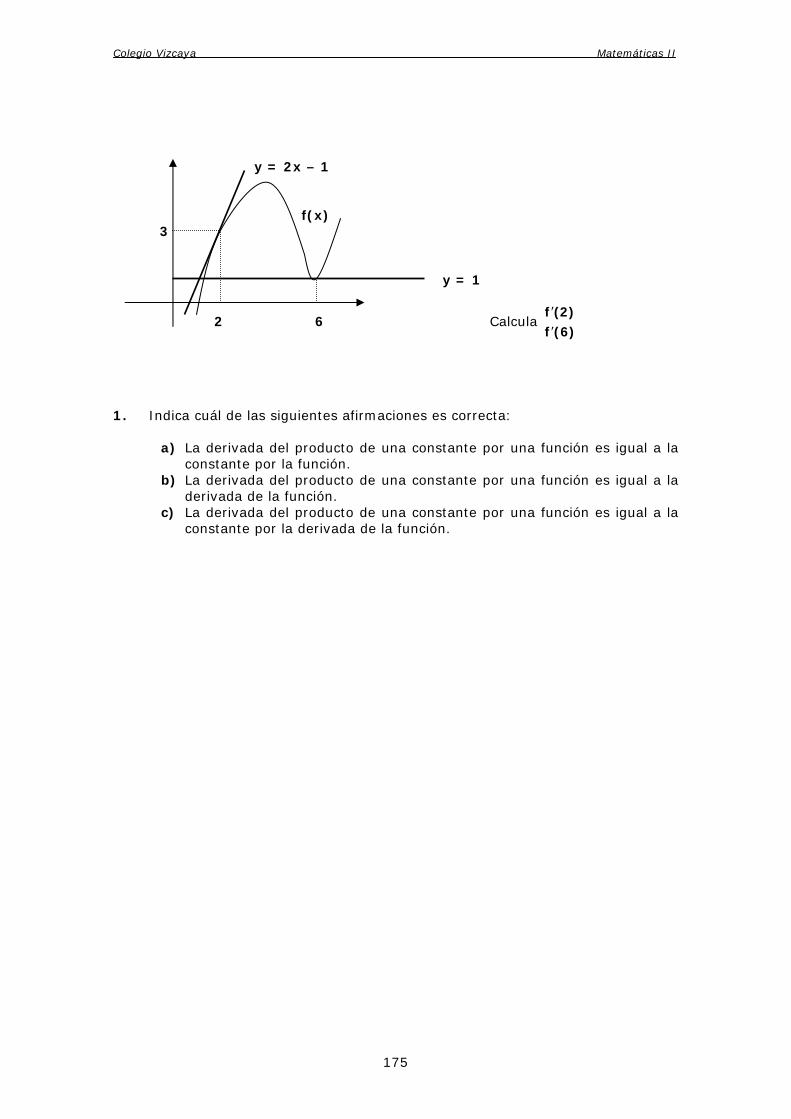
Colegio Vizcaya Matemáticas II
175
y = 2x – 1 f(x) 3 y = 1
2 6 Calcula )6(f)2(f
′′
1. Indica cuál de las siguientes afirmaciones es correcta:
a) La derivada del producto de una constante por una función es igual a la constante por la función.
b) La derivada del producto de una constante por una función es igual a la derivada de la función.
c) La derivada del producto de una constante por una función es igual a la constante por la derivada de la función.

Colegio Vizcaya Matemáticas II
176
PROBLEMAS DE SELECTIVIDAD 1. (JUNIO 2007) Sea h una función derivable en todos los puntos, de la que se
conocen los siguientes valores: h(2) = 3 y h’(2) = -1. Se considera la función f(x) definida por:
f(x) = 3x)]x(h[ 22 ++
Hallar la ecuación de la recta tangente a la gráfica de la función f en el punto x=2. 2. (JUNIO 2006) Se sabe que una función f es derivable en todos los puntos y
además se sabe que f(1)=0 y que f’(1)= -2. Se considera la función h(x) definida por:
h(x) = e )x(f + 22 )]x(f[)x(fx + Calcular razonadamente h’(1). 3. (JULIO 2004) Definir el concepto de recta tangente a una curva en un punto.
Describir brevemente el significado geométrico de la recta tangente.
Hallar la ecuación de la recta tangente a f(x) = x1x
xe
2
3x2
++ en el punto
x=1. 4. (JUNIO 2004) Dada la función:
a. f(x)=⎩⎨⎧
>−
≤
0xaxx
0xsenx2
¿Existen valores de a para los que f sea derivable en toda la recta real? Razonar la afirmación y, si es afirmativa, encontrar dichos valores. 5. (JULIO 2002) Encontrar la ecuación de la recta tangente para la función
f(x)=x 164 + en un punto cualquiera x=a. ¿Existe algún valor de a para el cual dicha recta tangente tenga pendiente 1? ¿Existe algún valor de a para el cual dicha recta tangente pase por el punto exterior a la curva P(0,0)? Razonar las contestaciones si son negativas o realizar los cálculos en caso de ser afirmativas. 6. (JUNIO 2001) Se considera una función f derivable en un punto x=a. Escribir la
ecuación de la recta tangente a f en dicho punto. ¿Cuál es el significado geométrico de dicha recta? Encontrar la ecuación de la recta tangente a la función f(x) = x 163+ en un punto genérico x=a.
Colegio Vizcaya Matemáticas II
177
UNIDAD DIDÁCTICA 10
APLICACIONES DE LAS DERIVADAS
2º BACHILLER

Colegio Vizcaya Matemáticas II
178
OBJETIVOS DIDÁCTICOS 1. Interpretar los conceptos de crecimiento, decrecimiento, extremos relativos,
curvatura y puntos de inflexión de una función 2. Encontrar las zonas de crecimiento y decrecimiento de una función y sus
extremos relativos . 3. Determinar la curvatura de una función y sus puntos de inflexión. 4. Representar funciones a partir del estudio de sus propiedades. 5. Resolver problemas de optimización CONCEPTOS 1. Monotonía: Intervalos de crecimiento y decrecimiento. 2. Extremos relativos. 3. Problemas de optimización. 4. Curvatura: concavidad y convexidad. 5. Puntos de inflexión. 6. Estudio del dominio, puntos de corte, simetría, periodicidad y asíntotas de una
función. 7. Representación gráfica de algunos tipos de funciones.
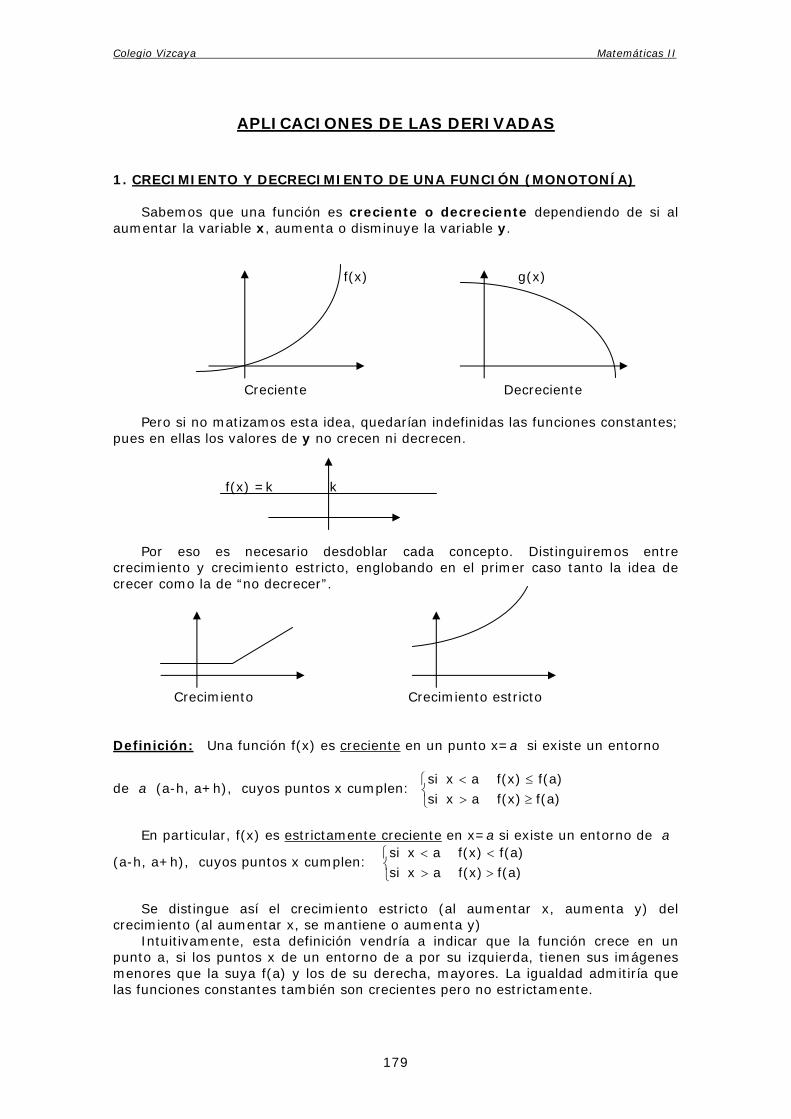
Colegio Vizcaya Matemáticas II
179
APLICACIONES DE LAS DERIVADAS
1. CRECIMIENTO Y DECRECIMIENTO DE UNA FUNCIÓN (MONOTONÍA) Sabemos que una función es creciente o decreciente dependiendo de si al aumentar la variable x, aumenta o disminuye la variable y. f(x) g(x) Creciente Decreciente Pero si no matizamos esta idea, quedarían indefinidas las funciones constantes; pues en ellas los valores de y no crecen ni decrecen. f(x) =k k Por eso es necesario desdoblar cada concepto. Distinguiremos entre crecimiento y crecimiento estricto, englobando en el primer caso tanto la idea de crecer como la de “no decrecer”. Crecimiento Crecimiento estricto Definición: Una función f(x) es creciente en un punto x=a si existe un entorno
de a (a-h, a+h), cuyos puntos x cumplen: ⎩⎨⎧
≥>≤<
f(a) f(x) ax sif(a)f(x) ax si
En particular, f(x) es estrictamente creciente en x=a si existe un entorno de a
(a-h, a+h), cuyos puntos x cumplen: ⎩⎨⎧
>><<
f(a) f(x) ax sif(a)f(x) ax si
Se distingue así el crecimiento estricto (al aumentar x, aumenta y) del crecimiento (al aumentar x, se mantiene o aumenta y) Intuitivamente, esta definición vendría a indicar que la función crece en un punto a, si los puntos x de un entorno de a por su izquierda, tienen sus imágenes menores que la suya f(a) y los de su derecha, mayores. La igualdad admitiría que las funciones constantes también son crecientes pero no estrictamente.
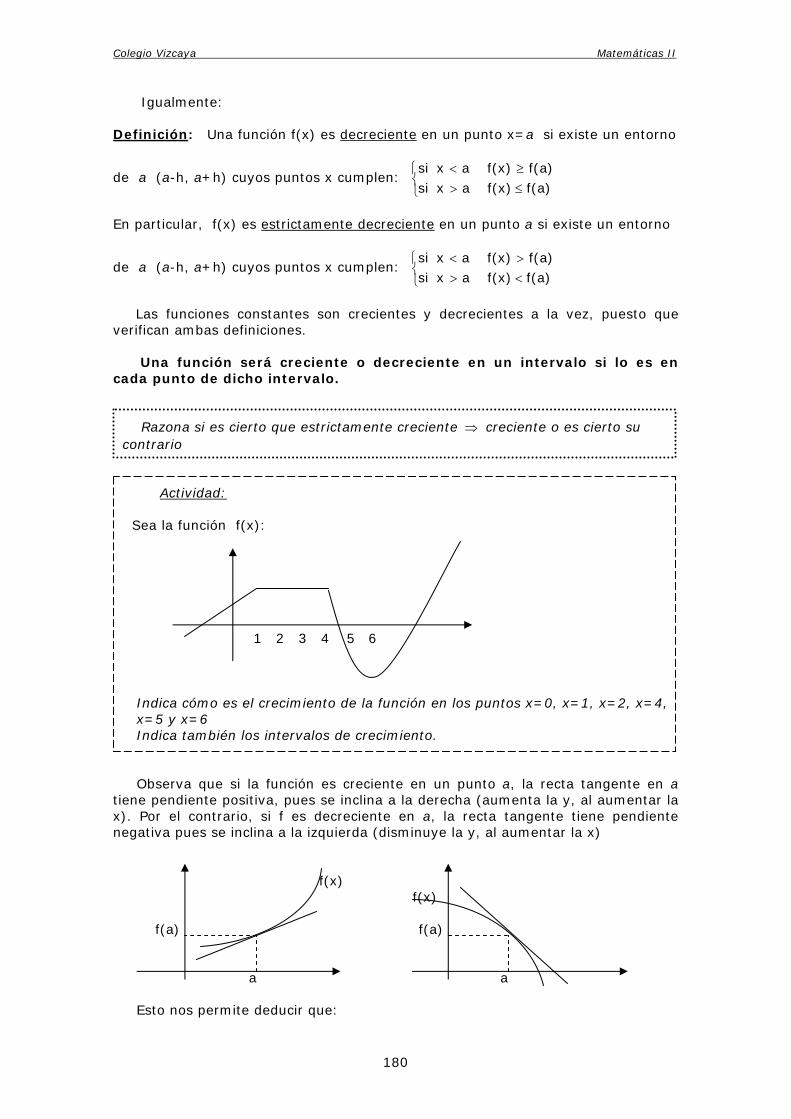
Colegio Vizcaya Matemáticas II
180
Igualmente: Definición: Una función f(x) es decreciente en un punto x=a si existe un entorno
de a (a-h, a+h) cuyos puntos x cumplen: ⎩⎨⎧
≤>≥<
f(a) f(x) ax sif(a)f(x) ax si
En particular, f(x) es estrictamente decreciente en un punto a si existe un entorno
de a (a-h, a+h) cuyos puntos x cumplen: ⎩⎨⎧
<>><
f(a) f(x) ax sif(a)f(x) ax si
Las funciones constantes son crecientes y decrecientes a la vez, puesto que verifican ambas definiciones. Una función será creciente o decreciente en un intervalo si lo es en cada punto de dicho intervalo. Razona si es cierto que estrictamente creciente ⇒ creciente o es cierto su contrario Actividad: Sea la función f(x): 1 2 3 4 5 6 Indica cómo es el crecimiento de la función en los puntos x=0, x=1, x=2, x=4, x=5 y x=6 Indica también los intervalos de crecimiento. Observa que si la función es creciente en un punto a, la recta tangente en a tiene pendiente positiva, pues se inclina a la derecha (aumenta la y, al aumentar la x). Por el contrario, si f es decreciente en a, la recta tangente tiene pendiente negativa pues se inclina a la izquierda (disminuye la y, al aumentar la x) f(x) f(x) f(a) f(a) a a Esto nos permite deducir que:

Colegio Vizcaya Matemáticas II
181
Teorema Dada una función f(x) derivable en un punto x=a,
1) si f´(a)>0, entonces f(x) es estrictamente creciente en a 2) si f´(a)<0, entonces f(x) es estrictamente decreciente en a
Demostración:
Probaremos el caso 1), pues el caso 2) sigue una demostración análoga.
Sabemos que f´(a) = h
)a(f)ha(flim
0h
−+→
= ax
)a(f)x(flim
ax −−
→ > 0
Hacemos el cambio de variable a+h = x, luego h = x - a por hipótesis y h→ 0 se transforma en x→ a
Si dicho límite es positivo, se deduce entonces que en un entorno del punto a, es
decir, en valores de x muy próximos a a, los cocientes ax
)a(f)x(f−−
también deben
ser positivos. Por tanto numerador y denominador deben tener el mismo signo. Se deduce entonces que: si x - a >0 ⇒ f(x) – f(a) >0 si x - a <0 ⇒ f(x) – f(a) <0 o lo que es lo mismo: si x > a, f(x) > f(a) si x < a, f(x) < f(a) expresión que coincide con la definición de crecimiento estricto dada al comienzo de la unidad, tal como queríamos demostrar. c.q.d. Observa que el teorema no contempla la posibilidad f´(a)=0. Debemos deducir entonces, que no es posible hacer ninguna afirmación única sobre el crecimiento de la función f con ese dato, luego que existen distintas posibilidades. Veámoslo:
Si f´(a)=0, f puede ser: 1) estrictamente creciente en a
Ejemplo: f(x) = x 3 en el punto a=0 Sabemos que f’(0)=0 pues f’(x) = 3x2 y se observa que f es estrictamente creciente en a=0
f(x)=x^3
Graph Limited School Edition
-8 -6 -4 -2 2 4 6 8
-8
-6
-4
-2
2
4
6
8
x
y

Colegio Vizcaya Matemáticas II
182
2) estrictamente decreciente en a
Ejemplo; f(x) = -x 3 en el punto a=0
Sabemos que f’(0)=0 pues f’(x) = -3x2 y se observa que f es estrictamente decreciente en a=0
f(x)=-x^3
Graph Limited School Edition
-8 -6 -4 -2 2 4 6 8
-8
-6
-4
-2
2
4
6
8
x
y
3) ni creciente ni decreciente en a
Ejemplo; f(x) = x 2 en el punto a=0
Sabemos que f’(0)=0 pues f’(x) = 2x y se observa que f no crece ni decrece en el punto 0 por tratarse de un mínimo de la función.
f(x)=x^2
Graph Limited School Edition
-20 -18 -16 -14 -12 -10 -8 -6 -4 -2 2 4 6 8 10 12 14 16 18 20 22 24
-20
-15
-10
-5
5
10
15
20
x
y
Podemos enunciar ahora el teorema recíproco al anterior. Teorema
Dada una función f(x) derivable en un punto x=a:
1) si f(x) es estrictamente creciente en a, entonces f’(a) ≥0 2) si f(x) es estrictamente decreciente en a, entonces f’(a) ≤0
Luego si la derivada es positiva en un punto, seguro que la función es creciente en él, pero si la función es creciente en ese punto, su derivada puede ser positiva ó 0. Veamos ahora cómo calcular los intervalos de crecimiento de una función. Será necesario estudiar el signo de su derivada. Para ello, buscaremos primero los puntos donde la derivada es 0 y estableceremos intervalos entre ellos.

Colegio Vizcaya Matemáticas II
183
Ejemplo:
Calcula los intervalos de monotonía de la función x4x4x)x(f 23 +−=
1) Realizamos la primera derivada: 4x8x3)x('f 2 +−= 2) Se estudia el signo de f’ (+,-) buscando los puntos en que f’=0 y estableciendo intervalos entre ellos (pues para cambiar de signo debe atravesar el eje X dado que una función es positiva cuando su gráfica está situada encima del eje X y negativa si está debajo)
⇒=+−⇒= 04x8x30)x('f 2 ⎩⎨⎧
=±
=−±
=3/2
26
486
48648x
0 1 3
x 2/3 2 f’(x) + - + f’(0)=4 f’(1)=-1 f’(3)=7 Como el signo se mantiene constante en cada intervalo (si no fuera así debería haber otros puntos de corte con el eje X), se elige un punto cualquiera de cada intervalo y se calcula el signo de su derivada. Entonces se deduce:
La función es estrictamente creciente en ( )∞∪⎟⎠
⎞⎜⎝
⎛∞− ,2
32
,
La función es estrictamente decreciente en ⎟⎠
⎞⎜⎝
⎛2,
32
**Observa que no se incluyen los extremos de los intervalos (2/3 y 2) pues no se puede asegurar que la función sea creciente o decreciente en puntos cuya derivada es 0** **Se puede deducir que 2/3 tiene que ser un máximo de f, pues la función pasa de ser creciente a decreciente al pasar por dicho punto. Igualmente, el punto x=2 será un mínimo por ser un punto de cambio de decreciente a creciente de la función f **
**Es importante incluir en el cuadro para establecer los intervalos, no sólo los puntos de derivada 0, sino también aquellos puntos que no pertenezcan al dominio de la función, pues puede haber un cambio en el crecimiento de la función antes y después de una asíntota vertical**
Colegio Vizcaya Matemáticas II
184
Puede ocurrir que f’(x) sea distinta de cero, en cuyo caso se deduce que f’ mantiene el mismo signo en todos sus puntos es decir, es positiva/negativa para cualquier valor de x, y por tanto, la función f(x) será estrictamente creciente o decreciente en todo su dominio Ejemplo: 01x3)x('f xx)x(f 23 ≠+=⇒+= . Si )x('f es distinta de 0, mantiene siempre el mismo signo.
Se observa que 3x2 +1 toma siempre valores positivos, luego f(x) será estrictamente creciente en todo su dominio. (Se deduce entonces también que la función no tiene extremos) Conviene indicar que no siempre se alterna el signo de f’ al cambiar de intervalo. Ejemplo: Calcula los intervalos de monotonía de la función f(x) = x3 f’(x)= 3x2 =0 ⇒ x 2 =0 ⇒ x=0 x -1 0 1
f’(x) + + De lo que se deduce que f(x) = x3 es una función estrictamente creciente en todo su dominio. Observa su gráfica en páginas anteriores. (Se deduce también que al no cambiar el crecimiento, el punto 0 no es un extremo de la función) Actividad 1. Estudia la monotonía de las siguientes funciones:
a) f(x)= x 23 x− b) f(x)=1x1x
−+
c) f(x)= x· e x
2. EXTREMOS RELATIVOS
Definición: Una función f(x) tiene un ⎩⎨⎧
relativo mínimo
relativo máximo en un punto x=a, si existe
un entorno de a , tal que ⎩⎨⎧
><
)a(f)x(f)a(f)x(f ∀ x perteneciente al entorno.
Definición: Se dice que el punto x=a es un máximo (mínimo) absoluto si su imagen f(a) es el mayor (menor) valor que toma la función en todo su dominio. Los puntos máximos y mínimos reciben el nombre genérico de extremos.
Colegio Vizcaya Matemáticas II
185
Es evidente que los extremos absolutos son también relativos pues si su imagen es la mayor/menor de todo el dominio, también lo será en un entorno del punto. Por tanto, bajo el nombre genérico de extremos relativos incluimos a todos los extremos. Si f(x) es continua, los máximos relativos son los puntos donde la función pasa de ser creciente a decreciente, y viceversa para los mínimos relativos. Si la función no es continua no tiene por qué ser cierto.
• º
a Además si es derivable se cumple: Teorema Si f tiene un máximo o mínimo en x=a y existe f’(a), entonces f’(a)=0. Demostración: En los puntos extremos la función no es creciente ni decreciente, luego la derivada no puede ser positiva ni negativa, y como existe, sólo puede ser igual a 0. c.q.d. También es fácil constatar que los puntos extremos tienen tangente horizontal (pendiente 0) f(x) Sin embargo el enunciado recíproco no es necesariamente cierto, pues puede haber puntos tales que f’(a)=0, que no son extremos. (Estos puntos recibirán más adelante el nombre de puntos de inflexión) Ejemplo: f(x) = x 3 en el punto a=0, donde se observa que la tangente es también horizontal.
f(x)=x^3
Graph Limited School Edition
-8 -6 -4 -2 2 4 6 8
-8
-6
-4
-2
2
4
6
8
x
y

Colegio Vizcaya Matemáticas II
186
Queda entonces claro que la condición f’(a)=0, es necesaria para que el punto a sea un extremo (todos los extremos son puntos de derivada 0), pero no es suficiente, pues hay otros puntos que pueden cumplir la misma condición. Se hace necesario entonces añadir una nueva condición que discrimine mejor a los puntos extremos. Teorema Si x=a es un punto tal que f’(a)=0 y existe f’’(a), entonces:
⎩⎨⎧
=⇒<
=⇒>
f(x) de relativo máximo un es ax punto el 0(a)'' f sif(x) de relativo mínimo un es ax punto el 0(a)'' f si
Demostración: f(x) a Si x=a es un máximo sucede lo contrario. CÁLCULO DE EXTREMOS Para determinar los extremos de una función, buscaremos primero los puntos de derivada 0. A continuación calcularemos la derivada segunda en cada uno de esos puntos: serán mínimos, aquellos donde f’’ sea positiva y serán máximos, donde sea negativa. En los puntos donde f’’ sea 0 no podremos hacer ninguna afirmación sin tener en cuenta otros datos que más adelante analizaremos. Ejemplo:
Calcular los extremos de la función f(x) = 1x
x2
−
1) Hallamos f’ e igualamos a 0
f’(x) = 0)1x(x2x
)1x(x-1)-(x x2
2
2
2
2
=−−
=−
⇒ x(x-2)=0 ⇒ ⎩⎨⎧
==
2x0x
Los puntos x = 0, 2 son los posibles extremos (también podrían ser puntos de inflexión) Para determinarlo calculamos f’’ 2) Hallamos f’’ y sustituimos los puntos obtenidos
f’’(x) = 4
22
)1x(
)1x( 2 )x2x()1x)(2x2(
−−−−−−
= [ ]
4
22
)1x(
x2x1x2x)1x(2
−+−+−−
=
= 3)1x(
2−
f’’(0) = 01
2<
− luego el punto x=0 es un máximo de f(x)
Observa que en un entorno del punto a las pendientes de las tangentes van aumentando, es decir, f’ es creciente y por tanto su derivada f’’ debe ser positiva. a mínimo ⇒ f’ creciente en un entorno ⇒ f’’(a)>0
Colegio Vizcaya Matemáticas II
187
f’’(2) = 012
> luego el punto x=2 es un mínimo de f(x)
Por tanto, (0,0) es un máximo y (2,4) es un mínimo de f(x) ** Si hubiéramos hecho el cuadro del crecimiento de la función, se advertiría fácilmente que 0 y 2 son máximo y mínimo respectivos, pues marcarían el cambio de creciente a decreciente y viceversa.** Hay que tener en cuenta que lo dicho anteriormente sólo es aplicable a extremos donde la función sea derivable. Existen otros extremos, puntos angulosos o de discontinuidad, que no podrían ser calculados de la manera antes indicada. o a a En ambos casos el punto a es un máximo de la función pero no se cumple f’(a)=0 porque no existe f’(a). Actividades 2. Calcula los extremos de las siguientes funciones:
a) f(x)= x 23 x− b) f(x)=1x1x
−+
c) f(x)= x· e x
3. PROBLEMAS DE OPTIMIZACIÓN En muchos campos de la vida real (Biología, Física, Economía…) se requiere optimizar funciones, es decir, hallar sus valores máximos o mínimos (máximo beneficio, mínimo coste, área mínima etc.) con la limitación de uno o más condicionantes. Veamos un ejemplo: Ejemplo: De todos lo rectángulos de área 36 m 2 , hallar el de perímetro mínimo. (Si queremos tener un contexto real, supongamos que debemos vallar dicho terreno y que el coste de la valla es elevado)

Colegio Vizcaya Matemáticas II
188
Para su resolución seguiremos los siguientes pasos:
1) Se definen las incógnitas (con unidades) y la función a optimizar y Sean x e y las dimensiones del rectángulo en m. x La función a optimizar es el perímetro (mínimo) P = 2x+2y (Observa que la función tiene dos variables y eso dificulta hallar su derivada para calcular los extremos)
2) Se traducen a ecuaciones las condiciones o restricciones del problema: Sabemos que el área es 36, es decir x · y = 36
3) Se despeja una de las incógnitas para poder escribir la función anterior en una sola variable: Como x = 36/y entonces f(x) = 2 · 36/y + 2y = 72/y + 2y
4) Se calcula el valor máximo o mínimo de la función f (f’(x) =0)
f(x) = y
y272 2+ ⇒ f’(x) =
2
22
y
)y272(y4 +−=
2
2
y
72y2 −=0 ⇒
2y 2 - 72 = 0 ⇒ y 2 = 36 ⇒ y = ± 6 5) Se rechazan los resultados que carezcan de sentido en el contexto Eliminamos la solución y = -6, pues un lado de un rectángulo no puede tener longitud negativa. La única solución posible es y = 6 m. En caso de que hubiera otras soluciones posibles habría que comprobar cual de ellas es el valor mínimo comprobando que f’’ es positiva. Si hubiera más de un mínimo posible, se calcularía el valor de la función en cada uno de ellos y se elegiría como solución el valor más pequeño (mínimo absoluto)
6) Se redacta la solución con unidades
Si y= 6, x= 636
= 6
luego el rectángulo de perímetro mínimo es el cuadrado de lado 6 m.
Colegio Vizcaya Matemáticas II
189
Actividades
3. Halla dos números cuya suma sea 20, de manera que la suma de sus inversos sea mínima.
4. De entre todos los números de dos cifras tales que la cifra de las decenas mas la de las unidades sea ocho, halla el número tal que la suma de los cuadrados de sus cifras sea máxima.
5. Se desea construir el marco para una ventana rectangular de 6 m 2 de
superficie. El metro de tramo horizontal cuesta 2’5 € y el de tramo vertical 3 €. Calcula las dimensiones de la ventana para que el coste del marco sea mínimo y determina dicho coste.
6. Halla las dimensiones del rectángulo de área máxima inscrito en una circunferencia de 20 cm. De radio.
4. CURVATURA Y PUNTOS DE INFLEXIÓN Definición: Se dice que la función f(x) es cóncava en un punto x=a si en un entorno de a, las rectas tangentes en cada punto quedan por debajo de la curva y se dice que f(x) es convexa en un punto x=a, si en un entorno de a las rectas tangentes en cada punto quedan por encima de la curva. a a CÓNCAVA en x=a CONVEXA en x=a En caso de que f sea cóncava en el punto x=a se observa, como hemos indicado anteriormente, que las pendientes de las tangentes son cada vez mayores, luego f’ es creciente y, por tanto f’’ es positiva. Ocurre lo contrario si f es convexa en el punto x=a. f cóncava en x=a ⇒ f’ creciente en x=a ⇒ f’’(a)≥0 f convexa en x=a ⇒ f’ decreciente en x=a ⇒ f’’(a)≤0 De lo razonado anteriormente se deduce:

Colegio Vizcaya Matemáticas II
190
Teorema Dada una función f(x) y un punto x=a donde es derivable dos veces, entonces:
1) si f’’(a)>0, f(x) es cóncava en x=a 2) si f’’(a)<0, f(x) es convexa en x=a
(Queda pendiente de analizar más adelante el caso f’’(a)=0) Luego para calcular los intervalos de concavidad y convexidad de una función es necesario estudiar el signo de su derivada segunda. El procedimiento es análogo al del estudio del crecimiento, cambiando f’ por f’’. Ejemplo: Calcular la curvatura de la función f(x) = x3 - 2x Hallamos la derivada segunda de la función: f’(x) = 3x2 - 2 f’’(x) = 6x Para estudiar el signo de f’’, se iguala a 0 y se establecen los intervalos: f’’(x) = 6x = 0 ⇒ x = 0 x 0 -1 1 f’’(x) - + Se deduce que f(x) es convexa en (-∞ , 0) y cóncava en (0 , ∞ ) **Es importante incluir en la tabla los puntos que no pertenecen al dominio, pues pueden cambiar la curvatura** Ejemplo:
Calcular la curvatura de la función f(x) = x1
Veamos el signo de f’’ : f’(x) = 2x1−
f’’(x) = 4xx2
= 3x
2 = 0 ⇒ 2 ≠ 0
Como Dom(f) = R-{0} x 0 -1 1 f’’(x) - + Se deduce que f(x) es convexa en (-∞ , 0) y cóncava en (0 , ∞ ) De hecho, la gráfica de la función es:
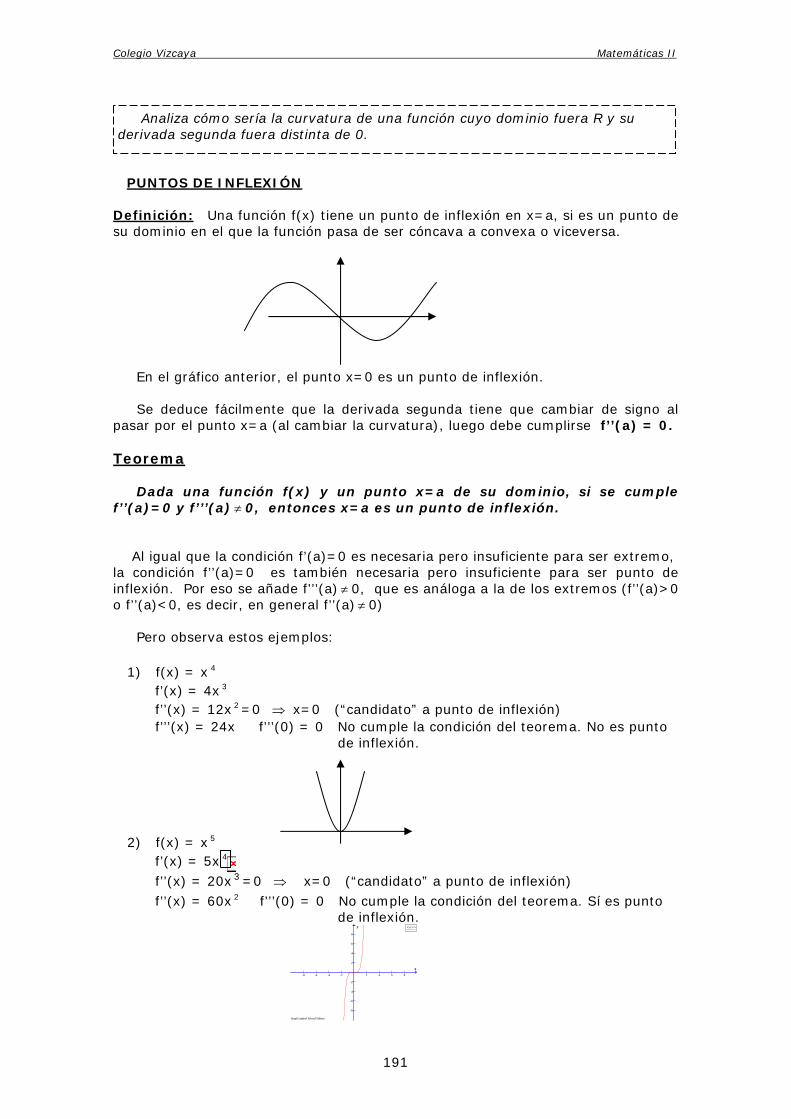
Colegio Vizcaya Matemáticas II
191
Analiza cómo sería la curvatura de una función cuyo dominio fuera R y su derivada segunda fuera distinta de 0. PUNTOS DE INFLEXIÓN Definición: Una función f(x) tiene un punto de inflexión en x=a, si es un punto de su dominio en el que la función pasa de ser cóncava a convexa o viceversa. En el gráfico anterior, el punto x=0 es un punto de inflexión. Se deduce fácilmente que la derivada segunda tiene que cambiar de signo al pasar por el punto x=a (al cambiar la curvatura), luego debe cumplirse f’’(a) = 0. Teorema Dada una función f(x) y un punto x=a de su dominio, si se cumple f’’(a)=0 y f’’’(a) ≠ 0, entonces x=a es un punto de inflexión. Al igual que la condición f’(a)=0 es necesaria pero insuficiente para ser extremo, la condición f’’(a)=0 es también necesaria pero insuficiente para ser punto de inflexión. Por eso se añade f’’’(a) ≠ 0, que es análoga a la de los extremos (f’’(a)>0 o f’’(a)<0, es decir, en general f’’(a) ≠ 0) Pero observa estos ejemplos: 1) f(x) = x 4 f’(x) = 4x 3 f’’(x) = 12x2 =0 ⇒ x=0 (“candidato” a punto de inflexión) f’’’(x) = 24x f’’’(0) = 0 No cumple la condición del teorema. No es punto de inflexión. 2) f(x) = x5 f’(x) = 5x 4 f’’(x) = 20x3 =0 ⇒ x=0 (“candidato” a punto de inflexión) f’’(x) = 60x2 f’’’(0) = 0 No cumple la condición del teorema. Sí es punto de inflexión.
f(x)=x^5
Graph Limited School Edition
-8 -6 -4 -2 2 4 6 8
-8
-6
-4
-2
2
4
6
8
x
y
Colegio Vizcaya Matemáticas II
192
Aunque parece contradictorio no lo es, pues el teorema anterior se puede ampliar: Teorema Dada una función f(x) y un punto x=a de su dominio. Si se cumple f’’(a)=0 y f’’’(a)=0, x=a será un punto de inflexión de f , si la primera derivada distinta de 0 en el punto a es de orden impar, y será extremo si la primera derivada no nula es de orden par. Comprueba el teorema en los ejemplos anteriores. Como el cálculo de los puntos de inflexión requiere realizar varias derivadas sucesivas, determinaremos dichos puntos realizando el cuadro de la curvatura. Los puntos cuya derivada segunda sea 0, sean del dominio y cambien el signo de la derivada segunda, serán de inflexión. Ejemplo:
Hallar los puntos de inflexión de la función f(x) = 4x
x2 −
f’(x) = 22
2
)4(x2x · x4x
−−−
= 22
2
)4x(4x
−−−
f’’(x) = 42
2222
)4(x2x )4(x 2 )4(-x )4(x x2
−−−−−−
= [ ]
42
222
)4x(8x24x- )4(x x2
−+++−
=
= 32
2
)4x(
)12(x x2
−+
= 0 ⇒ 2x (x 2 +12)=0 ⇒ ⎩⎨⎧
−=⇒=+
=
No 12x 012x
0x22
Luego en la tabla debe aparecer el punto 0, por tener derivada 0, y los puntos 2 y -2 que no pertenecen al dominio. -3 -1 1 3 x -2 0 2
f’’(x) - + - +
Aunque los tres puntos cambian la curvatura, sólo x=0 es punto de inflexión, pues es el único que pertenece al dominio de la función. Actividad 7. Estudia la curvatura y puntos de inflexión de las siguientes funciones:
a) f(x)= x 23 x− b) f(x)=1x1x
−+
c) f(x)= x· e x
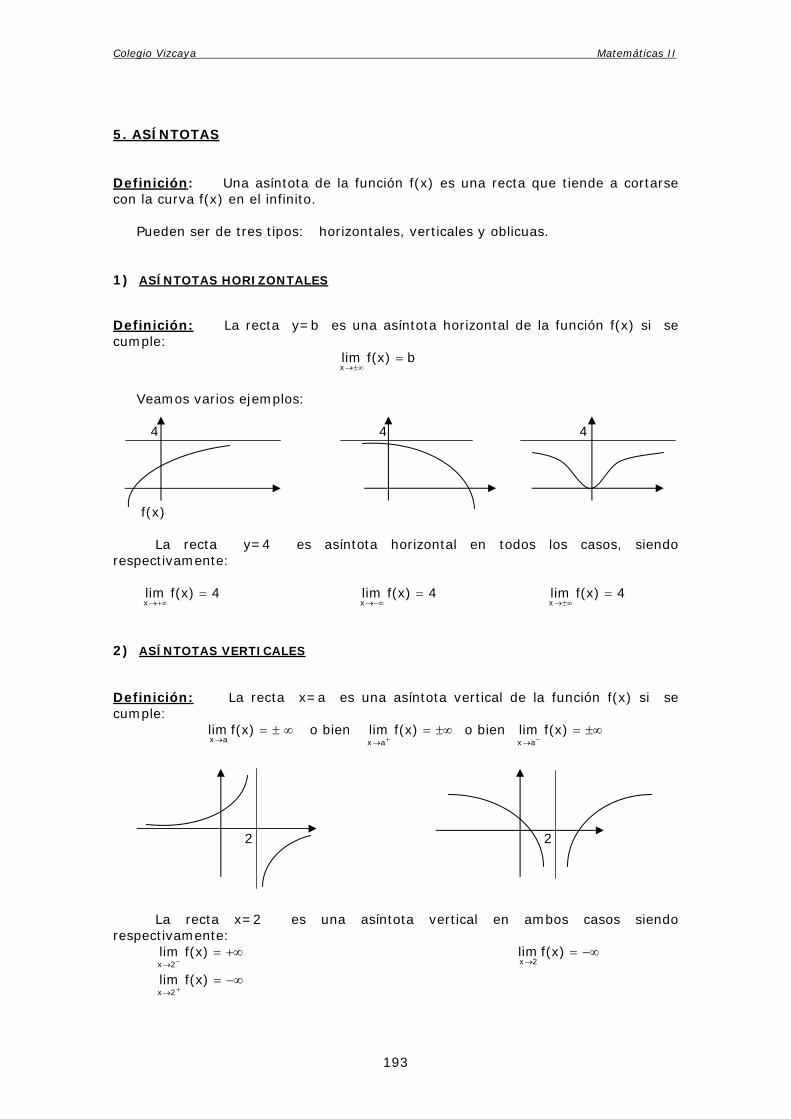
Colegio Vizcaya Matemáticas II
193
5. ASÍNTOTAS Definición: Una asíntota de la función f(x) es una recta que tiende a cortarse con la curva f(x) en el infinito. Pueden ser de tres tipos: horizontales, verticales y oblicuas. 1) ASÍNTOTAS HORIZONTALES Definición: La recta y=b es una asíntota horizontal de la función f(x) si se cumple: b)x(flim
x=
±∞→
Veamos varios ejemplos: 4 4 4 f(x) La recta y=4 es asíntota horizontal en todos los casos, siendo respectivamente: 4)x(flim
x=
+∞→ 4)x(flim
x=
−∞→ 4)x(flim
x=
±∞→
2) ASÍNTOTAS VERTICALES Definición: La recta x=a es una asíntota vertical de la función f(x) si se cumple: ∞±=
→ )x(flim
ax o bien ±∞=
+→)x(flim
ax o bien ±∞=
−→)x(flim
ax
2 2 La recta x=2 es una asíntota vertical en ambos casos siendo respectivamente: +∞=
−→)x(flim
2x −∞=
→)x(flim
2x
−∞=+→
)x(flim2x
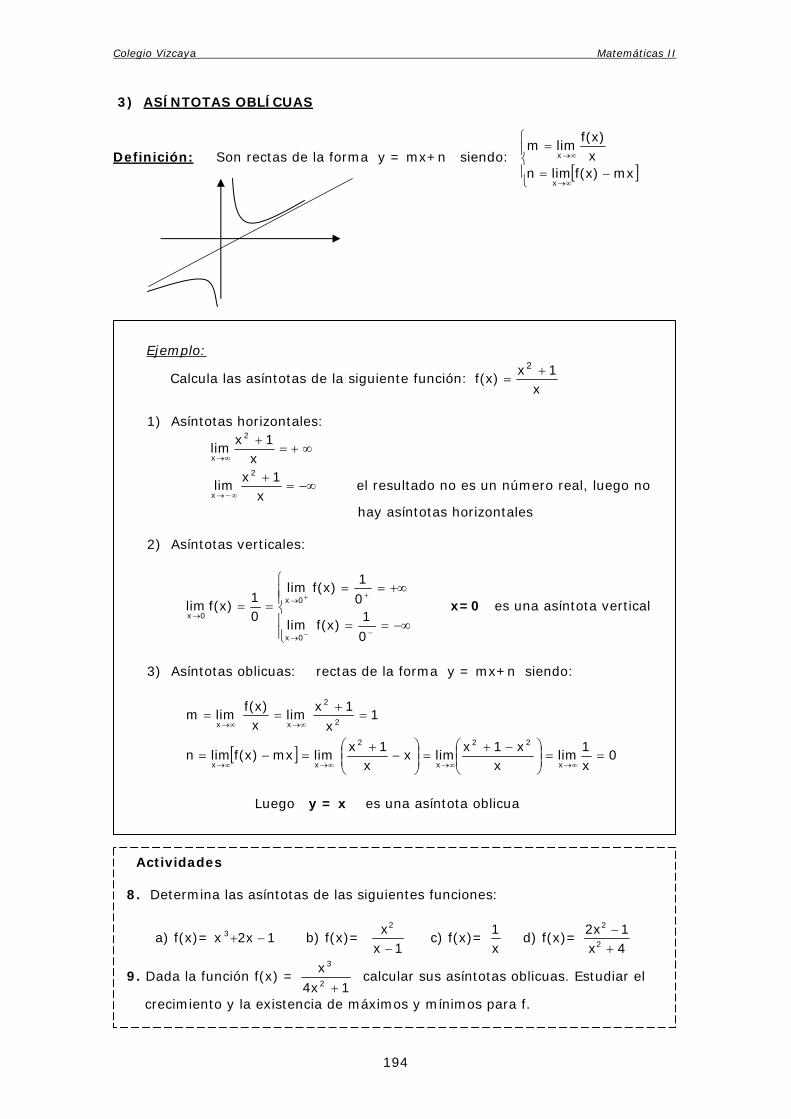
Colegio Vizcaya Matemáticas II
194
3) ASÍNTOTAS OBLÍCUAS
Definición: Son rectas de la forma y = mx+n siendo: [ ]⎪
⎩
⎪⎨
⎧
−=
=
∞→
∞→
mx)x(flimnx
)x(flimm
x
x
Actividades 8. Determina las asíntotas de las siguientes funciones:
a) f(x)= x 1x23 −+ b) f(x)= 1x
x2
− c) f(x)=
x1
d) f(x)= 4x1x2
2
2
+−
9. Dada la función f(x) = 1x4
x2
3
+ calcular sus asíntotas oblicuas. Estudiar el
crecimiento y la existencia de máximos y mínimos para f.
Ejemplo:
Calcula las asíntotas de la siguiente función: x
1x)x(f
2 +=
1) Asíntotas horizontales:
∞+=+
∞→
x1x
lim2
x
−∞=+
∞−→ x1x
lim2
x el resultado no es un número real, luego no
hay asíntotas horizontales 2) Asíntotas verticales:
⎪⎪⎩
⎪⎪⎨
⎧
−∞==
+∞====
−−→
++→
→
01
)x(flim
01
)x(flim
01
)x(flim
0x
0x
0x x=0 es una asíntota vertical
3) Asíntotas oblicuas: rectas de la forma y = mx+n siendo:
[ ] 0
x1
limx
x1xlimx
x1x
limmx)x(flimn
1x
1xlim
x)x(f
limm
x
22
x
2
xx
2
2
xx
==⎟⎟⎠
⎞⎜⎜⎝
⎛ −+=⎟⎟
⎠
⎞⎜⎜⎝
⎛−
+=−=
=+
==
∞→∞→∞→∞→
∞→∞→
Luego y = x es una asíntota oblicua

Colegio Vizcaya Matemáticas II
195
6. REPRESENTACIÓN GRÁFICA DE CURVAS Para representar gráficamente una función desarrollaremos previamente los siguientes puntos: 1) Dominio: El dominio de una función son todos los valores de x para los que existe imagen. (Se excluyen los valores de x que dan lugar a ceros en el denominador, raíces de índice par de números negativos y logaritmos de números negativos ó 0)
2) Puntos de corte con los ejes: ⎩⎨⎧
==
0x:Yejeelcon0y:Xejeelcon
3) Simetrías: ⎩⎨⎧
∈∀−−=∈∀−=
)f(Domx)x(f)x(f)origenalrespecto(IMPAR)f(Domx)x(f)x(f)Yejealrespecto(PAR
4) Periodicidad: T es el período de f(x) si se cumple f(x) = f(x+T) para cualquier x, siendo T el menor nº real que cumpla esta condición. Ejemplo: f(x)= senx es periódica de período 2 π (T=2 π ) 5) Monotonía: f´(a)>0 ⇒ f(x) es estrictamente creciente en a
f´(a)<0, ⇒ f(x) es estrictamente decreciente en a
6) Extremos: ⎪⎩
⎪⎨⎧
>=∈
<=∈
0(a)'f' y 0(a)f' / Dom(f) a :MÍNIMOS
0(a)'f' y 0(a)f' / Dom(f)a :MÁXIMOS
7) Curvatura y puntos de inflexión:
⎪⎩
⎪⎨
⎧
≠=∈
<∈>∈
0(a)''f' y 0(a)'f' / Dom(f)a :INFLEXIÓN DE PUNTOS
0(x)'f' / Dom(f)x :CONVEXIDAD0(x)'f' / Dom(f)x :CONCAVIDAD
8) Asíntotas:
[ ]⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−==+=
±∞==
==
∞→∞→
→
±∞→
mx)x(flim n x
f(x)lim m siendo nmxy :OBLICUAS
)x(flim siendo ax :VERTICALES
b)x(flim siendo by :ESHORIZONTAL
xx
ax
x
9) Representación gráfica: Se dibujan previamente las asíntotas y se marcan los puntos destacados: de corte, extremos y de inflexión. Por último, se entrecruzan los cuadros del crecimiento y la curvatura y se establece el comportamiento de la función en cada zona. Veamos un ejemplo de una representación gráfica completa:
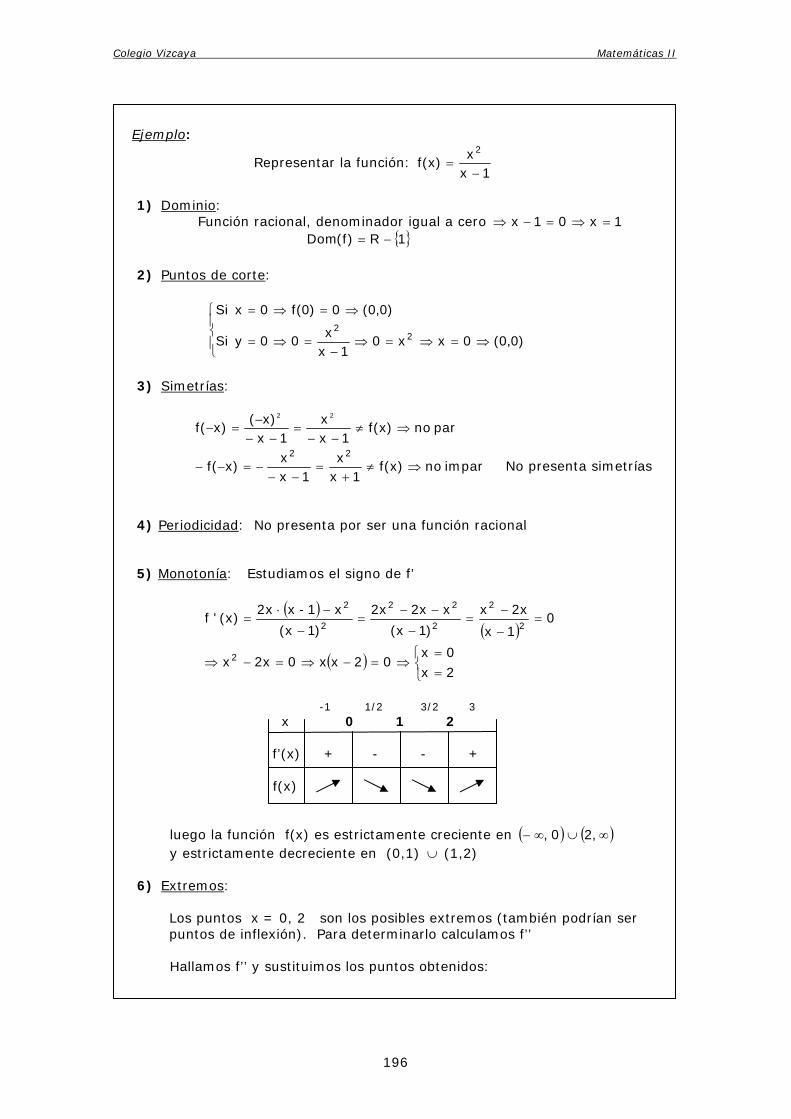
Colegio Vizcaya Matemáticas II
196
Ejemplo:
Representar la función: 1x
x)x(f
2
−=
1) Dominio: Función racional, denominador igual a cero 1x01x =⇒=−⇒ { }1R)f(Dom −= 2) Puntos de corte:
⎪⎩
⎪⎨
⎧
⇒=⇒=⇒−
=⇒=
⇒=⇒=
)0,0(0xx01x
x00ySi
)0,0(0)0(f0xSi
22
3) Simetrías:
par no)x(f1x
x1x
)x()x(f
22
⇒≠−−
=−−
−=−
parim no)x(f1x
x1x
x)x(f
22
⇒≠+
=−−
−=−− No presenta simetrías
4) Periodicidad: No presenta por ser una función racional 5) Monotonía: Estudiamos el signo de f’
( )
( )0
1x
x2x
)1x(
xx2x2
)1x(
x1-x2x(x) ' f
2
2
2
22
2
2
=−
−=
−
−−=
−
−⋅=
( )⎩⎨⎧
==
⇒=−⇒=−⇒2x0x
02xx0x2x2
-1 1/2 3/2 3
x 0 1 2 f’(x) + - - +
f(x)
luego la función f(x) es estrictamente creciente en ( ) ( )∞∪∞− ,20 , y estrictamente decreciente en (0,1) ∪ (1,2) 6) Extremos:
Los puntos x = 0, 2 son los posibles extremos (también podrían ser puntos de inflexión). Para determinarlo calculamos f’’ Hallamos f’’ y sustituimos los puntos obtenidos:

Colegio Vizcaya Matemáticas II
197
f’’(x) = 4
22
)1x()1x( 2 )x2x()1x)(2x2(
−−−−−−
= [ ]
4
22
)1x(x2x1x2x)1x(2
−+−+−−
=
= 3)1x(
2−
f’’(0) = 01
2<
− luego el punto x=0 es un máximo de f(x)
f’’(2) = 012
> luego el punto x=2 es un mínimo de f(x)
Hallamos las imágenes de los puntos:
⎪⎪⎩
⎪⎪⎨
⎧
⇒==⇒=
⇒=−
=⇒=
relativo mínimo es )4,2(412
f(2)2x Si
relativo máximo es )0,0(01
0f(0)0x Si
2
Por tanto, (0,0) es un máximo y (2,4) es un mínimo de f(x)
7) Curvatura y puntos de inflexión: Estudiamos el signo de f’’
f’’(x) = 3)1x(
2−
= 0 ⇒ 2 = 0 imposible, luego sólo se incluye en el
cuadro x=1. x 0 1 2
f’’(x) - + f(x) luego f(x) es cóncava en (1, ∞ ) y es convexa en (-∞ , 1) No tiene puntos de inflexión pues 1 no pertenece al dominio. 8) Asíntotas
a) Horizontales: +∞=−∞→ 1x
x lim
2
x ∞=
−−∞→-
1xx
lim2
x
f(x) no tiene asíntotas horizontales, pues el resultado debería ser un nº real. b) Verticales:
⎪⎪⎩
⎪⎪⎨
⎧
−∞==
+∞====
−
+
→
+→
→
-1x
1x
1x
0
1f(x) Lim
0
1f(x) Lim
01
)x(fLim x=1 es una asíntota vertical.
c) Oblicua: recta de la forma y=mx+n siendo:
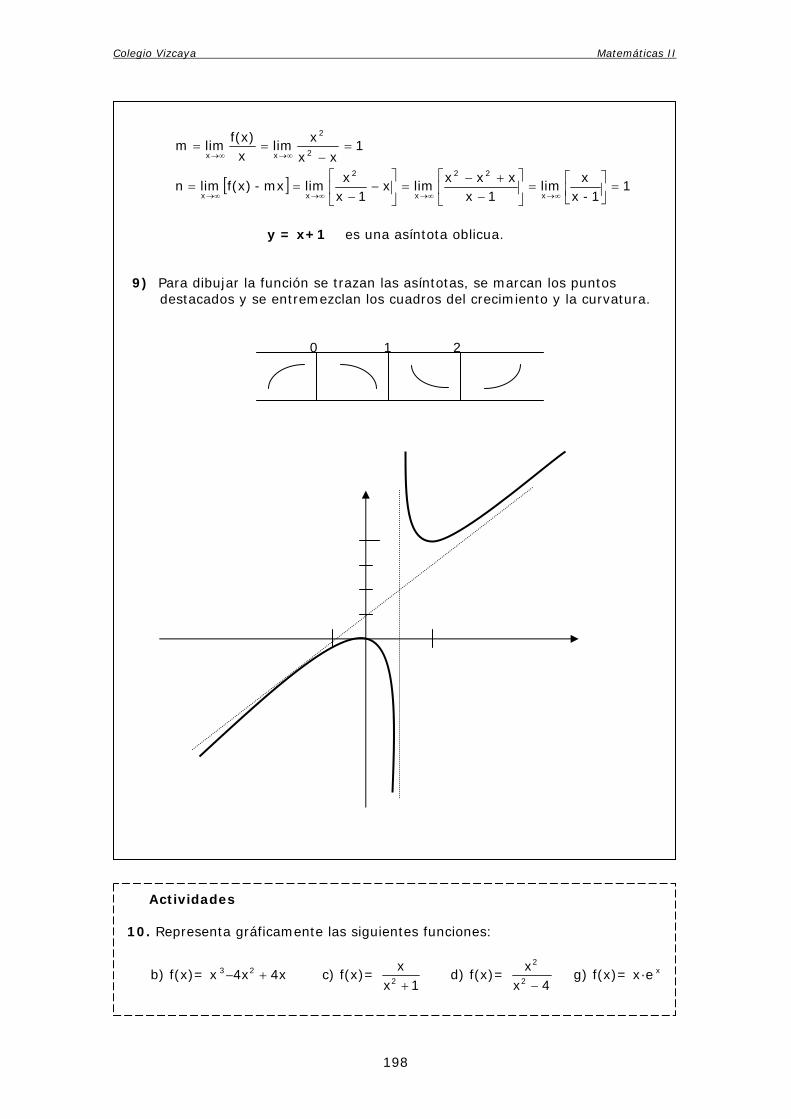
Colegio Vizcaya Matemáticas II
198
[ ] 1
1-xx
lim1x
xxx limx
1xx
limmx-f(x) limn
1xx
x lim
xf(x)
limm
x
22
x
2
xx
2
2
xx
=⎥⎦
⎤⎢⎣
⎡=⎥⎦
⎤⎢⎣
⎡−
+−=⎥
⎦
⎤⎢⎣
⎡−
−==
=−
==
∞→∞→∞→∞→
∞→∞→
y = x+1 es una asíntota oblicua. 9) Para dibujar la función se trazan las asíntotas, se marcan los puntos
destacados y se entremezclan los cuadros del crecimiento y la curvatura. 0 1 2 Actividades 10. Representa gráficamente las siguientes funciones:
b) f(x)= x x4x4 23 +− c) f(x)= 1x
x2 +
d) f(x)= 4x
x2
2
− g) f(x)= x·e x

Colegio Vizcaya Matemáticas II
199
APLICACIONES DE LAS DERIVADAS: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II 1. Estudia la monotonía y los extremos de las siguientes funciones:
a) f(x)= 3x -3x+1 b) f(x)=1x
x2
− c) f(x)=
x
2
ex3x2 −
d) f(x)= 1x
12 +
2. Estudia la curvatura y los puntos de inflexión de las funciones del ejercicio
anterior. 3. Representa gráficamente las siguientes funciones:
a) f(x)= 1x
x2
− b) f(x)=
1x22x4
−+
c) f(x)= 1x
x2
3
−
d) f(x)= x·Lnx e) f(x)= 2x11+
(curva de Agnesi) f) f(x) = x1
ex
−
4. La recta y= 2x+6 es una asíntota oblicua de una función f(x) = kx1x2 2
−+
Halla el valor de k y representa gráficamente la función para ese valor. 5. Halla el valor de a y b para que la función f(x)= bx3ax 23 +− tenga un punto
de inflexión en (-1,-3).
6. Dada la función f(x)= ax+b+x8
, calcula el valor de a y b para que la gráfica
de f pase por el punto (-2,-6) y tenga, en ese punto, tangente horizontal. 7. La curva y= cbxaxx 23 +++ corta al eje de abscisas en el punto x=-1 y tiene
un punto de inflexión en (2,1). Calcula a, b y c. 8. Calcula el valor de a, b, c y d en la función f(x)= dcxbxax 23 +++ sabiendo
que tiene un mínimo en el punto (0,-1) y un punto de inflexión en ⎟⎠
⎞⎜⎝
⎛−21
,21
.
9. Determina la parábola y = ax2 +bx+c, sabiendo que pasa por el punto (5,-2)
y es tangente a la recta y = 2x-3 en el punto (2,1). 10. En la función f(x) = cxbxax 23 ++ , halla a, b y c para que la función tenga un
máximo relativo en x=1 y un punto de inflexión en (0,0).
Colegio Vizcaya Matemáticas II
200
11. Halla a y b para que la función f(x) = a·Lnx +bx2 +x tenga extremos en los
puntos x=1 y x=2. Determina si son máximos o mínimos. 12. Dada la función f(x) = x 5bxax23 +++ , halla a y b para que la función tenga
en x=1 un punto de inflexión con tangente horizontal.
13. Halla el valor de k que hace que la función f(x) = kx
e2
x
+ tenga un extremo
relativo único. ¿Se trata de un máximo o de un mínimo? 14. Entre todos los triángulos isósceles de perímetro 30 cm., ¿cuál es el de área
máxima? 15. Una hoja de papel debe contener 18 cm2 de texto impreso. Los márgenes
superior e inferior deben tener 2 cm. cada uno, y los laterales, 1 cm. Halla las dimensiones de la hoja para que el gasto de papel sea mínimo.
16. Para construir una caja sin tapa cortamos de un cartón cuadrado de 10 cm. de
lado, un cuadrado en cada esquina. Calcula el lado del cuadrado que se debe cortar para que el volumen de la caja sea máximo.
17. De todos los rectángulos de área 100 dm2 , halla las dimensiones del que
tenga la diagonal mínima. 18. Un triángulo isósceles tiene el lado desigual de 12 m. y la altura relativa a ese
lado de 5 m. Encuentra un punto sobre la altura tal que la suma de distancias a los tres vértices sea mínima
19. Sea un segmento de longitud 100 cm. que se divide en dos partes que van a
servir de base a dos rectángulos. En uno de ellos la altura es doble de la base y en el otro la altura es triple de la base. Hallar el punto de división del segmento para que la suma de las áreas de los rectángulos sea mínima.
20. Se considera una ventana rectangular rematada en la parte superior por un
triángulo equilátero. Sabiendo que el perímetro de la ventana es 6 m, hallar sus dimensiones para que su superficie sea máxima.
21. Se desea construir botes de forma cilíndrica de 10 l. de capacidad. Calcula sus
dimensiones para que el gasto de material sea mínimo. 22. Divide un segmento de 6 cm. de longitud en dos partes de manera que sea
mínima la suma de las áreas de los triángulos equiláteros construidos sobre ellas.
Colegio Vizcaya Matemáticas II
201
PROBLEMAS DE SELECTIVIDAD
23. (JULIO 2007) Un trozo de alambre de longitud 20 se divide en dos trozos. Con
el primero se forma un rectángulo cuya base es el doble de su altura y con el segundo trozo se forma un cuadrado. Encontrar las longitudes de dichos trozos para que sea mínima la suma del área del rectángulo y la del cuadrado.
24. (JUNIO 2007) Sea h la función definida por
h(x) = 4-x
x2
2
Encontrar las asíntotas, los intervalos de crecimiento y decrecimiento y los extremos de h. Dibujar un esquema de la gráfica de h.
25. (JULIO 2006) Se quiere poner marco a una ventana rectangular cuya
superficie es de 8 metros cuadrados. Los marcos verticales cuestan a 300 € el metro y los horizontales a 150 € el metro. Hallar las dimensiones de la ventana para que el marco cueste lo menos posible.
26. (JULIO 2006) Estudiar las asíntotas y los máximos y mínimos de la función
f(x) = 1x
x2
3
−
27. (JUNIO 2006) Sea f(x) = xxex −+ . Calcular la ecuación de la recta tangente
a f en un punto x para el cual dicha recta tangente sea paralela a la recta que pasa por los puntos (1,1) y (3,3).
28. (JULIO 2005) Estudiar los intervalos de crecimiento y decrecimiento de la
función f(x)= x4ex − . 29. (JUNIO 2005) Para cada h se considera la función f(x)= hx3x2 23 +−
Hallar los puntos en los que f alcanza sus valores máximos y mínimos. Encontrar h para que el valor de f en el mínimo local hallado antes, sea 0.
30. (JUNIO 2006) Representar la función dada por f(x)=1x
x2
− estudiando
previamente su dominio de definición y sus máximos y mínimos locales. ¿Tiene f asíntotas oblicuas? Razonar la contestación en caso negativo y calcular en caso afirmativo.
31. (JULIO 2004) Se considera la función f(x)=1x
x2
2
−. Describir el dominio de
definición, los intervalos de crecimiento y decrecimiento y los extremos de f. Trazar un esquema de su gráfica.
32. (JUNIO 2004) Del polinomio P(x)= x BxAx23 ++ se sabe que su recta
tangente en el punto x=1 es paralela a la recta y=7x-3 y, también se sabe, que tiene un punto extremo en x = -1. Con estos datos hallar A y B y razonar si con dichos valores, p(x) tiene algún otro extremo además del correspondiente al punto X = -1.

Colegio Vizcaya Matemáticas II
202
33. (JULIO 2003) ¿Qué significa que la recta y = ax+b sea una asíntota oblicua
para la función f(x)?
Encontrar la asíntota oblicua para la función f(x)= 5x3
cxx2
23
++
en función del
valor de c. 34. (JULIO 2003) Sea la función f(x)= 2x cbxax23 +++ . Encontrar los valores
de a, b y c para los cuales f tenga sus extremos en los puntos x=1 y x=2 y de forma que el punto P(1,6) pertenezca a la gráfica de f.
35. (JUNIO 2003) Sea f la función definida por f(x)= e 1e4 xx2 +−
Estudiar los intervalos de crecimiento y decrecimiento de f y sus asíntotas. ¿Tiene algún máximo o mínimo?
36. (JULIO 2002) Estudiar los intervalos de crecimiento y decrecimiento, los extremos locales y las asíntotas de f(x) = x x2 e− . Trazar su gráfica.
37. (JUNIO 2002) Sea f la función definida por f(x) = 2xx
x2
2
−+ . Encontrar el
dominio de definición de f, sus intervalos de crecimiento y decrecimiento y sus asíntotas. ¿Tiene f algún tipo de máximo o mínimo?
38. (JUNIO 2001) De una función f se sabe que es derivable en todos los puntos
de la recta real. Además se sabe que f(0)=2 y que f '(0)=-2. Se definen dos nuevas funciones
g(x) = e )x(f y h(x) = f(e x ) ¿Hay datos suficientes para hallar g '(0)? ¿Y para hallar h '(0)? En caso afirmativo realizar dicho cálculo y en caso negativo explicar por qué no es posible.
39. (JUNIO 2001) Estudiar el dominio de definición, los intervalos de crecimiento y decrecimiento, los extremos locales y las asíntotas de la
función f(x) = )1x)(2x(
1x2−+
+
40. (JUNIO 2001) Se define la función f(x) mediante la fórmula f(x)= x x6 e .
Estudiar los máximos y mínimos locales de f(x). ¿Tiene algún tipo de asíntota la función f(x)?
41. (JULIO 2000) Una ventana está formada por una parte rectangular sobre la
que se apoya en la parte superior un semicírculo. Si la ventana tiene un perímetro total de 12 m., ¿cuáles son las dimensiones de la ventana que permiten mayor entrada de luz?
42. (JUNIO 2000) Determinar los coeficientes de la curva y = x CBxAx23 +++
para que sea tangente a la recta y = 3x-2 en el punto (1,1) y para que tenga un extremo local en el punto x=4.
Colegio Vizcaya Matemáticas II
203
UNIDAD DIDÁCTICA 11
TEOREMAS DE FUNCIONES DERIVABLES
2º BACHILLER
Colegio Vizcaya Matemáticas II
204
OBJETIVOS DIDÁCTICOS 1. Conocer el enunciado, la demostración y la interpretación geométrica de los
teoremas de funciones derivables: teorema de Rolle, teorema del valor medio de Lagrange y teorema de Cauchy.
2. Asegurar la existencia de soluciones en la ecuaciones, así como su número,
aplicando algunos teoremas de derivabilidad. 3. Resolver límites aplicando la regla de L’Hôpital. CONCEPTOS 1. Teorema de Rolle
2. Teorema del valor medio de Lagrange 3. Consecuencias del teorema del valor medio 4. Teorema de Cauchy 5. Regla de L’Hôpital
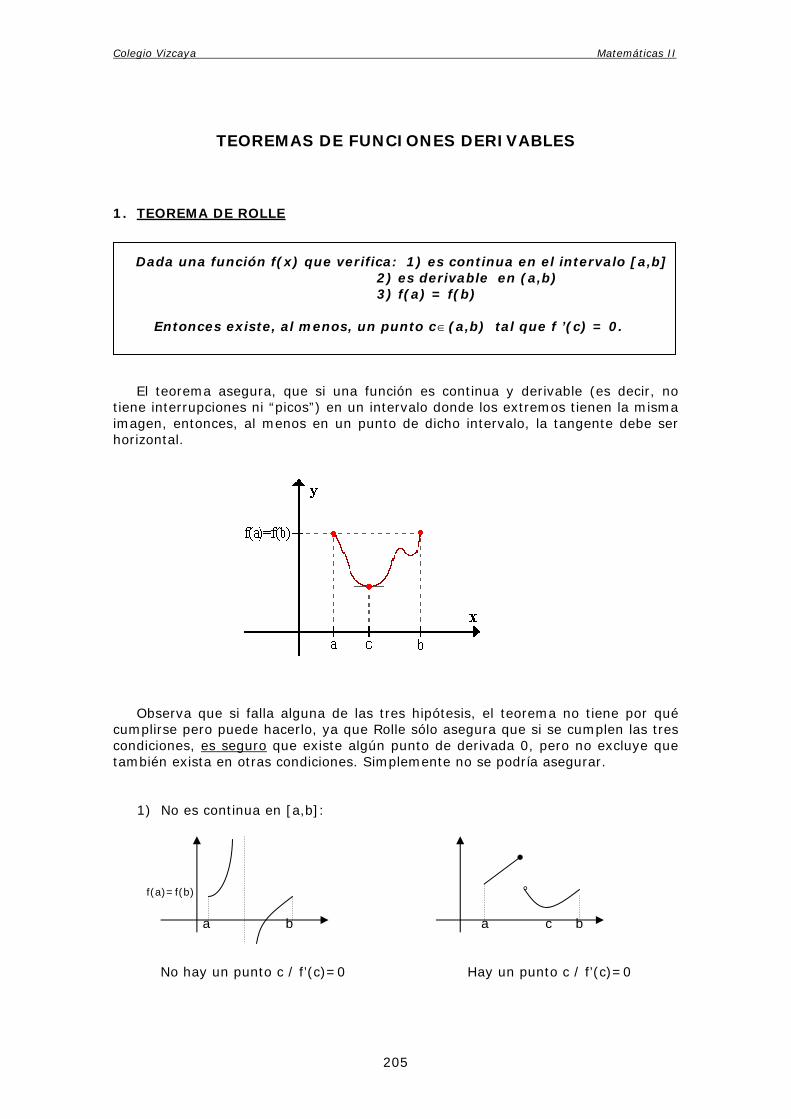
Colegio Vizcaya Matemáticas II
205
TEOREMAS DE FUNCIONES DERIVABLES 1. TEOREMA DE ROLLE Dada una función f(x) que verifica: 1) es continua en el intervalo [a,b] 2) es derivable en (a,b) 3) f(a) = f(b) Entonces existe, al menos, un punto c∈(a,b) tal que f ’(c) = 0. El teorema asegura, que si una función es continua y derivable (es decir, no tiene interrupciones ni “picos”) en un intervalo donde los extremos tienen la misma imagen, entonces, al menos en un punto de dicho intervalo, la tangente debe ser horizontal.
Observa que si falla alguna de las tres hipótesis, el teorema no tiene por qué cumplirse pero puede hacerlo, ya que Rolle sólo asegura que si se cumplen las tres condiciones, es seguro que existe algún punto de derivada 0, pero no excluye que también exista en otras condiciones. Simplemente no se podría asegurar.
1) No es continua en [a,b]: f(a)=f(b) ° a b a c b No hay un punto c / f’(c)=0 Hay un punto c / f’(c)=0
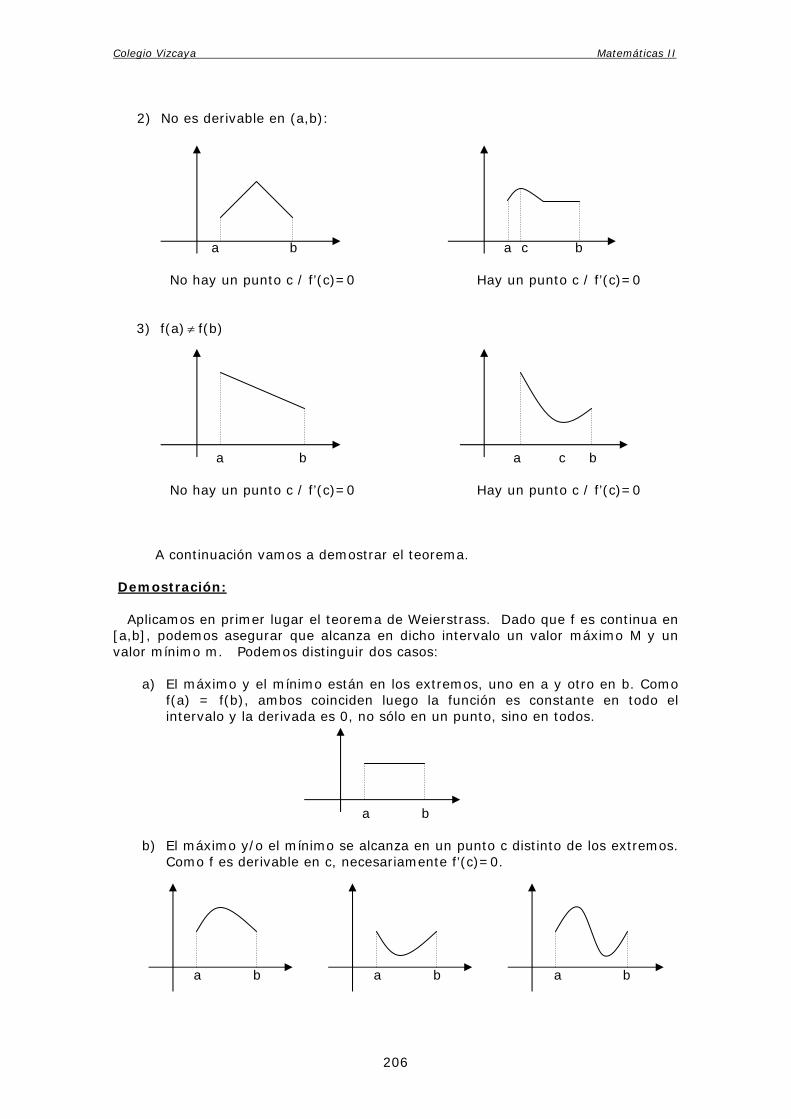
Colegio Vizcaya Matemáticas II
206
2) No es derivable en (a,b):
a b a c b
No hay un punto c / f’(c)=0 Hay un punto c / f’(c)=0
3) f(a) ≠ f(b) a b a c b
No hay un punto c / f’(c)=0 Hay un punto c / f’(c)=0
A continuación vamos a demostrar el teorema. Demostración: Aplicamos en primer lugar el teorema de Weierstrass. Dado que f es continua en [a,b], podemos asegurar que alcanza en dicho intervalo un valor máximo M y un valor mínimo m. Podemos distinguir dos casos:
a) El máximo y el mínimo están en los extremos, uno en a y otro en b. Como f(a) = f(b), ambos coinciden luego la función es constante en todo el intervalo y la derivada es 0, no sólo en un punto, sino en todos.
a b b) El máximo y/o el mínimo se alcanza en un punto c distinto de los extremos.
Como f es derivable en c, necesariamente f’(c)=0.
a b a b a b
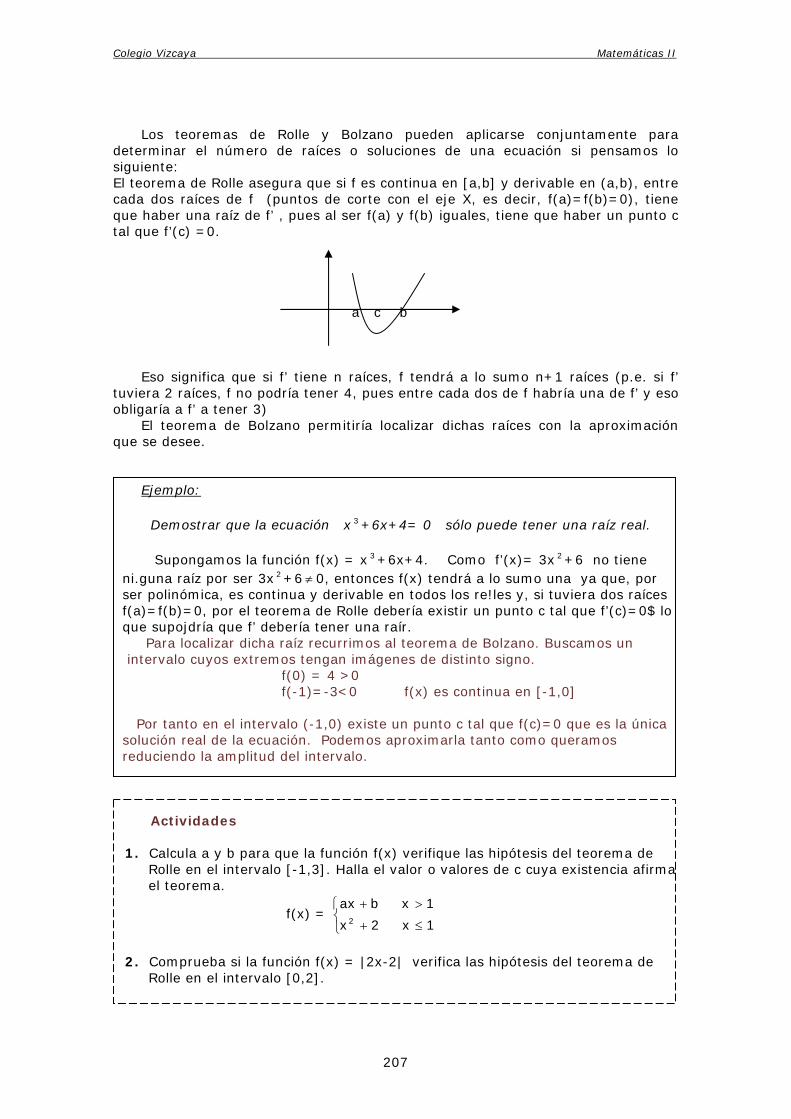
Colegio Vizcaya Matemáticas II
207
Los teoremas de Rolle y Bolzano pueden aplicarse conjuntamente para determinar el número de raíces o soluciones de una ecuación si pensamos lo siguiente: El teorema de Rolle asegura que si f es continua en [a,b] y derivable en (a,b), entre cada dos raíces de f (puntos de corte con el eje X, es decir, f(a)=f(b)=0), tiene que haber una raíz de f’ , pues al ser f(a) y f(b) iguales, tiene que haber un punto c tal que f’(c) =0. a c b Eso significa que si f’ tiene n raíces, f tendrá a lo sumo n+1 raíces (p.e. si f’ tuviera 2 raíces, f no podría tener 4, pues entre cada dos de f habría una de f’ y eso obligaría a f’ a tener 3) El teorema de Bolzano permitiría localizar dichas raíces con la aproximación que se desee. Ejemplo: Demostrar que la ecuación x 3 +6x+4= 0 sólo puede tener una raíz real. � Supongamos la función f(x) = x 3 +6x+4. Como f’(x)= 3x 2 +6 no tiene ni.guna raíz por ser 3x2 +6 ≠ 0, entonces f(x) tendrá a lo sumo una ya que, por ser polinómica, es continua y derivable en todos los re!les y, si tuviera dos raíces f(a)=f(b)=0, por el teorema de Rolle debería existir un punto c tal que f’(c)=0$ lo que supojdría que f’ debería tener una raír. Para localizar dicha raíz recurrimos al teorema de Bolzano. Buscamos un intervalo cuyos extremos tengan imágenes de distinto signo. f(0) = 4 >0 f(-1)=-3<0 f(x) es continua en [-1,0] Por tanto en el intervalo (-1,0) existe un punto c tal que f(c)=0 que es la única solución real de la ecuación. Podemos aproximarla tanto como queramos reduciendo la amplitud del intervalo. Actividades
1. Calcula a y b para que la función f(x) verifique las hipótesis del teorema de Rolle en el intervalo [-1,3]. Halla el valor o valores de c cuya existencia afirma el teorema.
f(x) = ⎩⎨⎧
≤+
>+
1x 2x
1x bax2
2. Comprueba si la función f(x) = |2x-2| verifica las hipótesis del teorema de Rolle en el intervalo [0,2].

Colegio Vizcaya Matemáticas II
208
2. TEOREMA DEL VALOR MEDIO O DE LAGRANGE Dada una función f(x) que verifica: 1) es continua en el intervalo [a,b] 2) es derivable en (a,b)
Entonces existe, al menos, un punto c∈(a,b) tal que f ’(c) = ab
)a(f)b(f−−
.
Como ab
)a(f)b(f−−
es la pendiente de la recta que une los extremos (a,f(a)) y
(b,f(b)), deducimos que el teorema asegura la existencia de un punto (al menos), del interior del intervalo, cuya tangente es paralela a la cuerda que une los extremos, siempre que f sea continua en [a,b] y derivable en (a,b).
Si giráramos los ejes hasta que f(a) fuera igual que f(b), estaríamos ante el teorema de Rolle. Demostración: Para demostrar el teorema nos ayudaremos de la siguiente función: F(x) = [b-a]f(x) – [f(b)-f(a)]x (Observa que en realidad, b-a y f(b)–f(a) son constantes, luego F(x) tiene la forma F(x) = k f(x) – k’ x ) Comprobamos que verifica las hipótesis del teorema de Rolle:
1) F(x) es continua en [a,b] por ser suma (resta) de funciones continuas 2) F(x) es derivable en (a,b) por ser suma (resta) de funciones derivables 3) F(a)= [b-a]f(a) – [f(b)-f(a)]a = bf(a) – af(a) – af(b) + af(a) = bf(a)-af(b)
F(b)= [b-a]f(b) – [f(b)-f(a)]b = bf(b) - af(b) – bf(b) + bf(a) = bf(a)-af(b) Luego F(a) = F(b)
Por tanto, podemos asegurar que existe, al menos, un punto c∈(a,b) / F’(c)=0
Colegio Vizcaya Matemáticas II
209
Como F’(x) = [b-a] f’(x) – [f(b) – f(a)] , entonces F’(c) = [b-a] f’(c) - [f(b) – f(a)] = 0 ⇒ (b-a) f’(c) = f(b) – f(a) ⇒
⇒ f’(c) = ab
)a(f)b(f−−
c.q.d.
Actividades
3. Calcula a y b para que la función f(x) verifique las hipótesis del teorema del valor medio en el intervalo [2,6] y calcula el punto o puntos en que se cumple dicho teorema.
f(x) =⎩⎨⎧
≥−+−
<−
4x bx10x
4x 3ax2
4. Determina el punto en el que la recta tangente a la curva f(x) = x2 -8x+16 es paralela a la cuerda que une los extremos de la función en dicho intervalo.
3. TEOREMA DE CAUCHY Sean dos funciones f(x) y g(x) que verifican: 1) son continuas en [a,b] 2) son derivables en (a,b) 3) g’(x) ≠ 0 ∀ x∈(a,b) (lo que supone g(a) ≠ g(b)) Entonces se puede asegurar que existe, al menos, un punto c∈(a,b) tal que:
)a(g)b(g)a(f)b(f
)c('g)c('f
−−
=
**Observa que el teorema de Lagrange es un caso particular del de Cauchy cuando g(x)=x.
**La tercera hipótesis g’(x) ≠ 0 permite que el cociente )c('g)c('f
exista siempre al
ser distinto de 0 el denominador. Igualmente, existirá siempre el cociente
)a(g)b(g)a(f)b(f
−−
, pues si g’(x) ≠ 0, se deduce necesariamente que g(a) ≠ g(b) ya que, por
reducción al absurdo, si fueran iguales, al ser g(x) continua y derivable, podría aplicarse el teorema de Rolle y se deduciría que existe un punto c del intervalo tal que g’(c)=0, lo que contradice la hipótesis.

Colegio Vizcaya Matemáticas II
210
Demostración: Para demostrar el teorema nos ayudaremos de la siguiente función: F(x) = [g(b)-g(a)]f(x) – [f(b)-f(a)]g(x) (Observa que en realidad, g(b)-g(a) y f(b)–f(a) son constantes, luego F(x) tiene la forma F(x) = k f(x) – k’ g(x) ) Comprobamos que verifica las hipótesis del teorema de Rolle:
1) F(x) es continua en [a,b] por ser suma (resta) de funciones continuas 2) F(x) es derivable en (a,b) por ser suma (resta) de funciones derivables 3) F(a)= [g(b)-g(a)]f(a)–[f(b)-f(a)]g(a)=g(b)f(a)–g(a)f(a)–g(a)f(b)+g(a)f(a) =
= g(b)f(a)-g(a)f(b) F(b)= [g(b)-g(a)]f(b)–[f(b)-f(a)]g(b)= g(b)f(b)-g(a)f(b)–g(b)f(b)+g(b)f(a)= = g(b)f(a)-g(a)f(b) luego F(a) = F(b)
Por tanto, podemos asegurar que existe, al menos, un punto c∈(a,b) / F’(c)=0 Como F’(x) = [g(b)-g(a)] f’(x) – [f(b) – f(a)]g’(x) , entonces F’(c) = g(b)-g(a)]f’(c) - [f(b)–f(a)]g’(c) = 0 ⇒ ⇒ [g(b)-g(a)]f’(c) = [f(b)–f(a)]g’(c) ⇒
⇒ )c('g)c('f
= )a(g)b(g)a(f)b(f
−−
c.q.d.
Actividad
5. Estudia si es posible aplicar el teorema de Cauchy a las funciones f(x)= x y g(x)=3x+1 en el intervalo [0,3] y halla, si es posible, el punto cuya existencia afirma el teorema.
4. REGLA DE L’HÔPITAL Sean dos funciones f(x) y g(x) que verifican:
1) son continuas y derivables en un entorne de un punto a (a-r, a+r) 2) )x(flim
ax→= )x(glim
ax→= 0
3) g’(x) ≠ 0 ∀ x del entorno de a
entonces, si existe )x('g)x('f
limax→
, también existe )x(g)x(f
limax→
=00
y son iguales, es
decir:
)x(g)x(f
limax→
= )x('g)x('f
limax→
Esta regla nos permitirá ampliar el cálculo de límites.

Colegio Vizcaya Matemáticas II
211
Ejemplo:
1) 00
senxx
lim0x
=→
indeterminación, podemos aplicar la regla de L’Hôpital:
111
xcos1
limsenx
xlim
0x0x===
→→
2) 2
x
0x x22xe)x2(
lim−−−
→ =
00
= x4
1e )x2(elim
xx
0x
−−+−→
= 0
121 −+−=
00
=
L´Hôpital L´Hôpital
= 4
e)x2(eelim
xxx
0x
−+−−→
= 4
211 +−− = 0
Observa que la regla de L´Hôpital puede ser utilizada tantas veces como sea necesario para resolver la indeterminación. La regla de L´Hôpital puede también utilizarse en el caso de las
indeterminaciones de la forma ∞∞
, y con algunas modificaciones de la función,
también en las de la forma 0·∞ , 1 ∞ , 0 0 y 0∞ . Veamos algunos ejemplos:
1) 2
x
x xe
lim∞→
= ∞∞
indet. = x2
elim
x
x ∞→=
∞∞
= 2e
limx
x ∞→=
2∞
= ∞
L´Hôpital
Sabíamos en unidades anteriores que 32
x31x2
lim2
2
x=
−∞→
al ser del mismo grado
ambos polinomios. Veamos que la regla de L’Hôpital lógicamente confirma ese resultado.
2) ∞∞
=−
∞→ 2
2
x x31x2
lim = x6x4
limx ∞→
= 64
limx ∞→
= 32
L’Hôpital
3) ⎥⎦
⎤⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛ π+
→ 2xtg · x lim
0x = 0·∞ indeterminación. Si transformamos el producto en un
cociente podremos aplicar la regla de L´Hôpital.
⎥⎦
⎤⎢⎣
⎡⎟⎠
⎞⎜⎝
⎛ π+
→ 2xtg · x lim
0x=
⎟⎠
⎞⎜⎝
⎛ π+
⎟⎠
⎞⎜⎝
⎛ π+
→
2xcos
2xsen · x
lim0x
=00
=⎟⎠
⎞⎜⎝
⎛ π+
⎟⎠
⎞⎜⎝
⎛ π++⎟
⎠
⎞⎜⎝
⎛ π+
→
2xsen-
2xcos · x
2xsen
lim0x
=101
−+
=-1
L’Hôpital

Colegio Vizcaya Matemáticas II
212
En el caso de las indeterminaciones 1 ∞ , 0 0 y 0∞ , podemos utilizar la regla de
L’Hôpital si transformamos dichas indeterminaciones en alguna del tipo 00
ó ∞∞
,
realizando las operaciones convenientes en la función. Sabemos que las propiedades de los logaritmos nos permiten “bajar” el exponente, por eso, es conveniente establecer una igualdad llamando “y” al límite, para extraer logaritmos en ambos miembros. Ejemplo:
x1
0x)x(coslim
→ = 1 ∞ indeterminación. Llamamos y al límite:
y = x1
0x)x(coslim
→ ⇒ Lny = Ln ⎟
⎟⎠
⎞⎜⎜⎝
⎛→
x1
0x)x(coslim = ⎟
⎟⎠
⎞⎜⎜⎝
⎛→
x1
0x)x(cosLnlim = ⎟
⎠
⎞⎜⎝
⎛→
Ln(cosx) · x1
lim0x
=
Por ser logaritmo una función continua, se puede intercambiar con el límite ya que debe cumplirse f(a) = )x(flim
ax→ , es decir,
Ln(a) = Lnxlimax→
⇒ Ln( xlimax→
) = Lnxlimax→
= x
)x(cosLnlim
0x→ =
01Ln
= 00
= 1
xcossenx
lim0x
−
→ =
xcossenx
lim0x
−→
= 10
= 0
L’Hôpital Por tanto Lny = 0, de donde se deduce que y = e0 = 1
Luego x1
0x)x(coslim
→ = 1
Actividades
6. Calcula los siguientes límites:
a) xcos1x1e
limx
0x −−−
→ f)
xe
1
x)Lnx(lim
∞→
b) x
)xe(Lnlim
3x
0x
+→
g) 1x3
1x)x2(lim −
→−

Colegio Vizcaya Matemáticas II
213
TEOREMAS DE FUNCIONES DERIVABLES: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II 1. Comprueba que la función f(x) = cosx verifica las hipótesis del teorema de
Rolle en el intervalo ⎥⎦
⎤⎢⎣
⎡ ππ−
2,
2, y halla el punto en el que se cumple dicho
teorema. 2. Dada la función f(x) = |3x-3| - 3 , demuestra que f(0) = f(2) pero f’(x) es
distinta de 0 en todos los puntos. ¿Se contradice el teorema de Rolle?
3. Demuestra que la ecuación x 0mx273 =+− no puede tener más de una
solución en el intervalo (-1,1) cualquiera que sea el valor de m. 4. Calcula los siguientes límites:
a) xcos1
eelim
senxx
ox −−
→ b) x
1
x)x1(lim +
∞→
c) 20x x
senxxlim
−→
d) tgx
0x x1
lim ⎟⎠
⎞⎜⎝
⎛→
e) senxx
xarctgxlim
0x −−
→ f) x3gcot
0x)x2sen1(lim −
→
PROBLEMAS DE SELECTIVIDAD 5. (JULIO 2007) Sea f(x)= x3 + 2x – 1 y sea I el intervalo I=[0,2]. Enunciar el
teorema del valor medio y aplicarlo a la función f en el intervalo I, hallando el punto de dicho intervalo para el cual se verifica el resultado del teorema.
6. (JULIO 2005) Enunciar el teorema de Rolle. Dado el intervalo I = [0,5] y dada
la función f(x) = x Ax 2 − , encontrar el valor de A para que se pueda aplicar el teorema de Rolle en el intervalo I y aplicar el teorema en ese caso.

Colegio Vizcaya Matemáticas II
214
7. (JUNIO 2003) Sea la función f(x) = ⎩⎨⎧
≥<++2x si x22x si baxx2
¿Existen
valores de a y b para los cuales f satisfaga las hipótesis del teorema del valor medio en el intervalo [0,4]? Razonar la contestación y, en caso afirmativo, calcular dichos valores.
8. (JULIO 2000) Enunciar el teorema del valor medio y aplicarlo a la función
f(x)=e x3 en los intervalos de la forma I n = [n, n+1] donde se supone que n es un número natural.
9. (JUNIO 2000) Sea g(x) la función definida mediante
g(x) = ⎩⎨⎧
∈
∈+
(0,1]x si 1)-(x x
[-1,0]x si 1)(x ax2
¿Para qué valores de a puede aplicarse el teorema de Rolle a la función g en el intervalo [-1,1]? Contestar razonadamente.
10. (SEPTIEMBRE 97) Calcular el siguiente límite:
20x x
)ax1(Ln)ax1(Lnlim
−++→
explicando y justificando el procedimiento seguido para hacer dicho cálculo. 11. (JUNIO 97) Enunciar el teorema del valor medio. Aplicar dicho teorema a la
función f(x) = x 2 + x en el intervalo [-1,2]. 12. (SEPTIEMBRE 96) Estudiar el límite que sigue en función del parámetro A
Ax
senx xlim
20x +→
13. (JUNIO 96) Un alumno llamado Ángel tiene que calcular un límite. Para ello
cuenta con la ayuda de su hermano gemelo Carlos y de su amigo Borja. El
límite es: Ax
senxlim
0x +→. Borja le dice que debe aplicar la regla de L’Hôpital sea
quien sea A, mientras que Carlos le dice que para ciertos valores de A no se puede aplicar ese método. ¿Quién está en lo cierto y por qué?

Colegio Vizcaya Matemáticas II
215
LÍMITES
1. 21
tgxxxsenx
lim0x
=−
−→
2. 1)x
x1Ln · x(lim
x=
+∞→
3. 1x
tgxlim
0x=
→ 4.
51
xe5xe
limx
2x
x=
++
∞→
5. 1)x1(Ln
e1lim
x
0x−=
+−
→ 6. e)x1(lim x2ctg2
0x=+
→
7. 0)1x(Ln)1x(lim1x
=−−→
8. 2x
0xex21lim −
→=−
9. 1xctg
1xe)xsen1(lim −π
→=π+ 10. a2
x
xe
axax
lim =⎟⎠
⎞⎜⎝
⎛−+
∞→
11. 1)senx(lim tgx
2x
=π
→
12. 21
x4
tg · x2tglim4
x
=⎟⎠
⎞⎜⎝
⎛ −π
π→
13. 1x2tg
4x
e)tgx(lim −
π→
= 14. π
=π
−→
22x
tg · )x1(lim1x
15. 4x
x3cosxcoslim
20x=
−→
16. 31
ctg3x · xlim0x
=→
17. acosaxsenasenx
limax
=−−
→ 18. 2
senxx3senx5sen
lim0x
=−
→
18. 21
xxcos1
lim20x
=−
→ 19.
asen1
axctgactgx
lim2ax
−=
−−
→ a π≠ k
20. 1senx1tgx1
limsenx
1
0x=⎟
⎠
⎞⎜⎝
⎛++
→ 21. 0
1x22x
lim
2x
x=⎟
⎠
⎞⎜⎝
⎛−+
∞→
22. 21
xsen
senxtgxlim
30x=
−→
23. 1x2x1
limx1x1
x=⎟
⎠
⎞⎜⎝
⎛++ −
−
∞→
24. 21
x2x1
limx1x1
0x=⎟
⎠
⎞⎜⎝
⎛++ −
−
→ 25.
32
x2x1
limx1x1
1x=⎟
⎠
⎞⎜⎝
⎛++ −
−
−→

Colegio Vizcaya Matemáticas II
216
Colegio Vizcaya Matemáticas II
217
UNIDAD DIDÁCTICA 12
INTEGRAL INDEFINIDA
2º BACHILLER
Colegio Vizcaya Matemáticas II
218
OBJETIVOS DIDÁCTICOS 1. Conocer el concepto de primitiva y de integral indefinida de una función. 2. Utilizar las propiedades de la integral para calcular integrales indefinidas,
descomponiéndolas en otras más sencillas. 3. Manejar la tabla de las integrales inmediatas. 4. Resolver integrales racionales con raíces reales simples o múltiples, o raíces
complejas en el denominador. 5. Resolver integrales indefinidas por los métodos de sustitución y partes CONCEPTOS 1. Primitiva de una función
2. Integral indefinida: definición y propiedades 3. Integrales inmediatas 4. Métodos de descomposición, cambio de variable y partes 5. Integrales racionales con raíces simples, múltiples o complejas en el
denominador.

Colegio Vizcaya Matemáticas II
219
INTEGRAL INDEFINIDA En unidades anteriores, dada una función f(x), hemos tratado de encontrar su función derivada f '(x). En esta unidad trataremos de recorrer el camino inverso, es decir, intentaremos buscar la función F(x) cuya derivada es f(x). derivar F(x) f(x) derivar f ’(x) Integrar x 2 2x 2 Se entiende que derivar e integrar son procesos recíprocos. De la misma forma que, dada la función 2x, podemos hallar su derivada: 2, también podemos conocer la función cuya derivada es 2x : x2 . Definición: Se dice que la función F(x) es una primitiva de f(x) si F’(x) = f(x).
Ejemplo: f(x) = x1
F(x) = Lnx
f(x) = cosx F(x) = senx
f(x) = x3 F(x) = 4x4
Así como la derivada de cada función es única, no ocurre lo mismo con la primitiva pues como la derivada de cualquier constante es 0, podemos encontrar infinitas primitivas para cada función. Ejemplo: Si f(x) = 2x, puede ser F(x)= x2 , F(x)=x 2 +2, F(x)= x 2 -27 … En general cualquier función de la forma F(x) = x2 +C donde C∈R, será una primitiva de 2x. Por tanto, si F(x) es una primitiva de f(x), también lo será cualquier función de la forma F(x) + C donde C representa cualquier nº real. Es lógico entonces, llamar integral de una función (“íntegro”, “entero”), al conjunto de todas sus primitivas. 1. DEFINICIÓN: Llamamos integral indefinida de la función f(x) y lo
representamos ∫ dx)x(f , al conjunto de todas sus primitivas, es decir:
∫ dx)x(f = { }RC),x(f)x('F/C)x(F ∈=+
** Nota: dx se lee diferencial de x e indica respecto a qué variable se realiza la integración. Actúa como un multiplicador **

Colegio Vizcaya Matemáticas II
220
(*) La diferencial de una función en un punto es igual al producto de su derivada por el incremento de la variable independiente x, es decir, df = f´(x)· ∆ x. En el caso particular de la función f(x) = x se cumpliría: dx = 1·∆ x ⇒ dx = ∆ x Por lo que sustituyendo: df = f´(x) dx Ejemplos:
∫ += C2x
xdx2
, ∫ += Cxtxdt , ∫ += Cxdx , ∫ += Ctdt , ∫ += Cz2dz2
Ejemplos:
a) ∫ dx5 = 5x + C b) ∫ dxex = e x + C
c) ∫ senxdx = - cosx + C d) ∫ dxx2 2 = 2 3x3
+ C
2. PROPIEDADES
1. |
dx)x(f ⎟⎠⎞⎜
⎝⎛∫ = f(x) (integrar y derivar son procesos recíprocos)
2. ( )∫ ± dx)x(g)x(f = ∫ dx)x(f ± ∫ dx)x(g
(la integral de la suma/resta es la suma/resta de las integrales)
3. ∫ dx)x(f · k = k· ∫ dx)x(f
(la integral de una constante por una función es la constante por la integral de la función) Se observa que dichas propiedades también se cumplen en la derivación dado que integrar es recíproco. Se deduce entonces que, igualmente, la integral del producto/cociente no podrá ser el producto/cociente de las integrales. Ejemplos:
a) ∫ +− dx)x1
senxx2( = x 2 +cosx+Ln|x|+C
b) ∫ dxx5 2 = 5 ∫ dxx2 = 53x3
+C

Colegio Vizcaya Matemáticas II
221
3. INTEGRALES INMEDIATAS Se deducen directamente de las reglas de derivación. FUNCIONES SIMPLES
FUNCIONES COMPUESTAS
∫ dx0 = C
∫ dx = x + C
∫ kdx = kx + C
∫ dxxn = 1n
x 1n
+
+
+ C siendo n 1−≠
C1a
f dx f´ ·f
1aa +
+=∫
+
siendo a 1-≠
∫ dxx1
= Ln|x| + C
∫ += C |f|Ln dxff
∫ dxax = CLnaax
+
∫ += CLnaa
dx f´ ·af
f
∫ senxdx = - cosx + C
∫ += C cosf - dx f´ · senf
∫ xdxcos = senx + C
∫ += C senf dx f´ · fcos
∫ dxxcos
12
= tgx + C
∫ += C tgf dxfcos
f2
∫ dxxsen
12
= - cotgx + C
∫ += C cotgf - dxfsen
f2
∫ −dx
x1
12
= ⎩⎨⎧
++
C arccosx-C arcsenx
∫ +=−
C arcsenf dxf1
f2
∫ +dx
x1
12
= arctgx + C
∫ +=+
C arctgf dxf1
f2

Colegio Vizcaya Matemáticas II
222
Actividades
1. ∫ =dxx3
2. ∫ = dx x3
3. =∫ dx x·x 3 4
4. ∫ =dx4x5
5. =+∫ dx)xx( 42
6. ∫ =+ dx)xx( 223
7. ∫ =dx x3cos
8. ∫ =dxx
35
9. ∫ =+
dxx1
22
10. =∫ dxx6
13
11. ∫ +− dx)senxex3
( x =
12. ∫ =⎟⎠
⎞⎜⎝
⎛+ dx3
x1 x

Colegio Vizcaya Matemáticas II
223
4. MÉTODOS DE INTEGRACIÓN 4.1 INTEGRACIÓN POR CAMBIO DE VARIABLE Consiste en transformar, a través de un cambio en la variable, una función compuesta en otra función simple, para poder aplicar las reglas de las integrales inmediatas. Ejemplos:
a) ∫ dxsenx · x 2 = ∫ 2xdt
· sent · x = ∫ dt · sent21
= - tcos21
= - 2xcos21
+ C
x 2 = t 2xdx = dt
dx = x2
dt
b) ∫ dxx
2Lnx
= ∫ dt xx2t
= ∫ dt2t = 2Ln
2t
= 2Ln
2Lnx
+ C
Lnx = t
dtdxx1
=
dx = xdt
c) ∫ +dx
1x3
1 = ∫ dt
3t2
t
12
= ∫ dt t · t1
32
= ∫ dt 32
= t32
= 13x 32
+ +C
3x+1 = t 2 3dx = 2t dt
dx = 3t2
dt
Actividades
1. ∫ + dx)1sen(x x3 2 =
2. ∫ dxxLnx
1=
3. ∫ dxx
xcos=
4. ∫ dx senx3 xcos =
5. ∫ − dxx4 2 =

Colegio Vizcaya Matemáticas II
224
4.2 MÉTODO DE INTEGRACIÓN POR PARTES Este método es útil cuando de trata de integrar un producto no realizable de funciones, es decir, productos de funciones trigonométricas, logarítmicas, exponenciales…
∫ dx Lnx · x , ∫ dx senx ·x2 , ∫ dx cosx ·ex …
(Si las funciones se pueden multiplicar entre sí antes de hacer la integral, es conveniente hacerlo) Dado que la derivada de un producto de funciones no es el producto de las derivadas, tampoco la integral del producto será el producto de las integrales. Para calcular la integral de un producto nos basaremos en la fórmula de la derivada del producto. Dadas dos funciones u(x) y v(x) sabemos que se cumple: (u · v)’ = u’(x) · v(x) + u(x) · v’(x) si integramos ambos miembros obtenemos:
∫ ∫ ∫+= dx (x)v' · u(x) dx v(x) · (x)u' (x)dx v)' · u(
de donde: (u · v)(x) = ∫ dx )x(v · )x('u + ∫ dx (x)v' · )x(u
Sabiendo que cada función u(x) tiene una función derivada u’(x) y una diferencial du = u’(x)·dx tenemos:
(u · v)(x) = ∫ du · )x(v + ∫ dv · )x(u y despejando obtenemos:
∫ ∫= du · v(x) - v)(x) · (u dv · )x(u o simplificando la escritura:
∫ ∫= du · v - v · u dv · u

Colegio Vizcaya Matemáticas II
225
Ejemplo:
1) ∫ dx senx · x = x · (-cosx)- ∫ − dx xcos = - x·cosx+ ∫ dx xcos = - x·cosx+senx+C
u = x du = dx dv = senxdx v = ∫ senxdx = -cosx
Puede que sea necesario reiterar el método de integración más de una vez.
2) ∫ = dx cosx ·x2 x 2 senx - dx senx · x2∫ = x 2 senx - 2 ( )senx cosx x +− =
u = x 2 du = 2xdx ejemplo anterior
dv = cosxdx v= ∫ xdxcos = senx
= x 2 senx + 2xcosx – 2senx + C
3) ∫ dx senx ·ex = - e x cosx + ∫ dx xcosex = - e x cosx + e x senx - ∫ dx senx ·ex ⇒
u = e x du = e x dx u = e x du = e x dx dv = senxdx v= -cosx dv = cosxdx v= senx
⇒ ∫ dx senx ·ex + ∫ dx senx ·ex = - e x cosx + e x senx ⇒
⇒ 2 ∫ dx senx ·ex = - e x cosx + e x senx ⇒ ∫ dx senx ·ex = C2
senxexcose xx
++−
Este método se emplea también en el caso de que una de las funciones sea la unidad: Calcula las siguientes integrales:
∫ dx Lnx =
∫ dx arcsenx =
∫ dx arctgx =
Si la integral a realizar ∫ du v es más complicada que la inicial, se puede
probar a intercambiar la elección de u y v. Si tampoco se consigue así simplificar el integrando, habría que concluir que este método no es el adecuado para resolver dicha integral.

Colegio Vizcaya Matemáticas II
226
Actividades
1. ∫ =+ dxe )·1x( x
2. ∫ xdxcosx =
3. ∫ dx2x x2 =
4. ∫ dx Lnx x =
4.3 INTEGRACIÓN DE FUNCIONES RACIONALES
En este apartado resolveremos únicamente integrales del tipo ∫ dx)x(Q)x(P
,
donde P(x) y Q(x) son polinomios. Dividiremos el estudio en los siguientes casos: A) El numerador P(x) es de grado menor que el denominador Q(x) A1) El denominador Q(x) tiene raíces reales y distintas A2) El denominador Q(x) tiene raíces reales y repetidas (múltiples) A3) El denominador Q(x) tiene raíces complejas B) El numerador P(x) es de grado mayor o igual que el denominador Q(x) Analizaremos ahora cada uno de ellos a través de diversos ejemplos. A) Grado P(x) < Grado Q(x) Previamente analizaremos el caso más simple: numerador de grado 0 y denominador de grado 1.
∫ +dx
baxm
= m ∫ +dx
bax1
= m· ∫ +dx
baxa
a1
= |bax|Ln am
+ +C
Observa que el numerador es “casi” la derivada del denominador. Podemos “ajustar” las constantes. Ejemplos:
a) ∫ +dx
2x3
= 3 Ln|x+2| +C
b) ∫ +dx
1x25
= 5 ∫ +dx
1x21
= ∫ +dx
1x22
25
= 25
Ln|2x+1|+C

Colegio Vizcaya Matemáticas II
227
*** Recuerda que siempre que el numerador sea la derivada del denominador salvo constantes (que se pueden ajustar), el resultado de la integral será logaritmo neperiano del denominador, es decir,
∫ dx)x(f)x(' f
= Ln|f(x)|+ C ***
Ejemplos:
a) dx2xx
1x22∫ −−
−= Ln|x 2 -x-2| + C
b) dx cosxsenx
dx tgx∫ ∫= = - Ln|cosx|+C
c) ∫ ∫ −++
=−+
+dx
2xx
1)3(2x dx
2xx
3x622
= 3 Ln|x 2 +x–2| +C
Utilizaremos estas conclusiones para abordar integrales más complicadas. Parece conveniente factorizar el denominador para descomponer el cociente en suma de cocientes más simples. A1) El denominador Q(x) tiene raíces reales y distintas. Ejemplo:
∫ −dx
1x
22
= ∫ ⎟⎠
⎞⎜⎝
⎛−
++
dx1x
B1x
A= ∫ ∫+
+−
dx1-x
1 dx
1x1
= -Ln|x+1|+Ln|x-1|+C
1x
)1x(B)1x(A
1x
222 −
++−=
− ⇒ 2 = A(x-1)+B(x+1) ⇒
⎩⎨⎧
=⇒+===⇒+==
-1A 0-2A2 -1x si1B 2B02 1x si
Como has podido ver, se trata de descomponer una fracción algebraica en la suma de dos más sencillas cuya integral es inmediata. Se han tenido que ajustar los numeradores para que la suma coincida con la función inicial. Actividades
a) ∫ −−−−
dxx2xx6x7x2
23
2
=
b) ∫ −+
dxxx1x
3
2
=

Colegio Vizcaya Matemáticas II
228
A2) El denominador Q(x) tiene raíces reales múltiples (repetidas). Ejemplo:
∫ −+
dx)1x(
1x3
= dx)1x(
C
)1x(
B1x
A32∫ ⎟⎟⎠
⎞⎜⎜⎝
⎛
−+
−+
−=
Observa que no podemos poner el mismo denominador x-1 en los tres sumandos como en el caso anterior, pues serían agrupables en uno solo. Además, es
necesario que el denominador (x-1) 3 sea común en los dos miembros.
3
2
3 )1x(
C)1x(B)1x(A
)1x(
1x
−+−+−
=−+
Si x=1 2 = C Si x=0 1 = A(-1)2 +B(-1)+C ⇒ 1 = A – B + C ⇒ A – B = -1 Si x=2 3 = A + B + C ⇒ 3 = A + B + 2 ⇒ A + B = 1 2A = 0 ⇒ A = 0 B = 1-A = 1
=( ) ( )∫∫ −
+−
dx1x
2dx
1x
132
= ∫ dtt
12
+ ∫ dtt
23
= ∫ − dtt 2 + 2 ∫ − dtt 3 = 2
t2
1t 21
−+
−
−−
=
x-1 = t dx = dt
= ( )
C1x
11x
12+
−−
−−
Actividad Realiza las siguientes integrales que mezclan raíces simples y múltiples:
∫ −++
dx4x3x
3x623
=
∫ +− x4x4x
dx23
=

Colegio Vizcaya Matemáticas II
229
A3) El denominador Q(x) tiene raíces complejas (factores de 2º grado Irreducibles) Haremos el estudio empezando por los casos más simples y aumentando progresivamente la complejidad. Comenzaremos por factores en el denominador que no tengan término en x e iremos completando el numerador sucesivamente a través de ejemplos. Partiremos de la fórmula de la derivada de la función arco tangente:
(arctgf(x))’ = )x(f1
)x('f2+
⇒ ∫ +=+
C arctgf(x) dx)x(f1
)x´(f2
Intentaremos ajustar a este formato la función a integrar, para llegar a una integral del tipo arco tangente.
1) ∫ +dx
4x3
2= ∫
+dx
14x
43
2=
43 ∫
⎟⎠
⎞⎜⎝
⎛+
dx
2x
1
12
= ( )∫+
dx
2x1
21
2 · 43
2=
23
arctg ⎟⎠
⎞⎜⎝
⎛2x
+C
Dividimos entre 4 la fracción Ajustamos la constante del para adaptarla a la forma 1+f 2 numerador para adaptarlo a f´
2) ∫ +dx
4xx5
2= 5 ·
21 ∫ +
dx4x
x22
= 25
Ln |x 2 +4| + C
Recuerda que es importante descartar primero que el numerador sea la derivada del denominador (salvo constantes), pues en ese caso, la integral es inmediata. Es lógico pensar que si el numerador es un polinomio de grado 1 de la forma ax+b, separando el cociente en dos sumandos tendremos dos integrales: una del tipo arco tangente y otra del tipo logaritmo neperiano. Veamos un ejemplo:
3) ∫ ++
dx3x2x3
2= ∫ ⎟
⎠
⎞⎜⎝
⎛+
++
dx3x
23x
x322
= 3 ∫ +dx
3xx2
21
2 + ∫ +
dx13
x3
2
2 =
= 23
Ln|x 2 +3| + ∫⎟⎠⎞
⎜⎝⎛+
dx
3x1
132
2 =
23
Ln|x 2 +3| + ∫⎟⎠⎞
⎜⎝⎛+
dx
3x1
31
3 · 32
2=
= 23
Ln|x 2 +3| + ⎟⎟⎠
⎞⎜⎜⎝
⎛
3
xarctg
332
+ C
Aumentando la complejidad, supongamos ahora que el denominador es un polinomio completo de grado 2: La estrategia consiste en transformar el polinomio completo en otro incompleto sin término en x, para poder aplicar alguna de las técnicas anteriores.

Colegio Vizcaya Matemáticas II
230
4) ∫ +−+
dx13x4x
5x22
= ( )∫ +−
+dx
92x
5x22
= ∫ +++
dt9t
5)2t(22
= ∫ ++
dt9t9t2
2 =
El denominador tiene raíces complejas: x - 2 = t
x = 2
52164 −± dx = dt
= ∫ ∫ ++
+dt
9t9
dt9t
t222
= Ln|t 2 +9|+ ∫ +dt
19t
12
=
= Ln|t 2 +9|+ ( )∫+
dt
3t1
12
= Ln|t 2 +9|+ ( )∫+
dt
3t1
31
3 2
=
= Ln|(x-2) 2 +9| + 3 arctg ⎟⎠
⎞⎜⎝
⎛3t
= Ln|x 2 -4x+13| + 3 arctg ⎟⎠
⎞⎜⎝
⎛ −3
2x+ C
Por último, si el denominador tiene raíces reales y complejas simultáneamente,
se descompone el cociente en sumandos de la forma ax
A−
para los factores
simples y cbxax
BAx2 ++
+ para los factores cuadráticos.
5) ∫ ++dx
xxx1
23 = ∫ ++dx
)1xx(x1
2 = ∫ ⎟
⎠
⎞⎜⎝
⎛++
++ dx
1xxCBx
xA
2 =
)1xx(x
x)CBx()1xx(A
)1xx(x
12
2
2 ++
++++=
++ ⇒ 1= A(x x)CBx()1x2 ++++
x = 0 ⇒ 1 = A x = 1 ⇒ 1 = 3A+B+C ⇒ B+C = -2 x = 2 ⇒ 1 = 7A+4B+2C ⇒ 4B+2C= -6 2B = -2 ⇒ B = -1 C = -1
= ∫ dxx1
+ ∫ ++−−
dx1xx
1x2
= Ln|x|+ ( )∫++
−−dx
43
21x
1x2
= Ln|x|+ ∫ +
−+−dt
43t
121t
2=
x+ 21 =t
dx =dt
= Ln|x|+ dt
43t
t2∫ +
−+ ∫ +
−dt
43t2
1
2 = Ln|x|- ∫ +
dt
43t
t221
2- ∫ +
dt13
t43
4
21
2 =
= Ln|x| - |43
t|Ln21 2 + - dt
3t21
134
21
2∫⎟⎠⎞
⎜⎝⎛+
=

Colegio Vizcaya Matemáticas II
231
= Ln|x| - |43
t|Ln21 2 + - ( )∫
+dt
3t21
32
23
· 32
2 =
= Ln|x| - |1xx|Ln21 2 ++ - ⎟
⎟⎠
⎞⎜⎜⎝
⎛ +
3
1x2arctg
33
+ C
Actividades
1) ∫ − 1xdx4
=
2) =++
+∫ dx3x2x
4x2
3) ∫ +−−
dx4x
1x2
B) Grado P(x) ≥ Grado Q(x)
En este caso es posible realizar la división entre ambos polinomios )x(Q)x(P
,
obteniéndose en cada caso el correspondiente cociente y resto. P(x) Q(x) Sabemos que se cumple: P(x) = Q(x)·C(x) + R(x) C(x) R(x) Dividimos la igualdad entre Q(x):
)x(Q)x(R
)x(Q)x(C)·x(Q
)x(Q)x(P
+=
Si integramos ahora ambos miembros obtenemos:
∫ dx)x(Q)x(P
= ∫ ∫+ dx)x(Q)x(R
dx)x(C
lo que permitirá realizar la integral inicial como suma de dos integrales: una de ellas inmediata por ser C(x) un polinomio y la otra de tipo A por ser necesariamente el grado del resto R(x) menor que el del divisor Q(x).

Colegio Vizcaya Matemáticas II
232
Ejemplo:
∫ −dx
1xx3
= dx )1xx( 2∫ ++ + ∫ −dx
1x1
= ++2x
3x 23
x+Ln|x-1|+C
x 3 | x - 1
23 xx +− 1xx2 ++
2x
xx2 +− x -x+1 1 Actividades
1) =+
+++dx
1x1x2xx
2
23
∫
2) ∫ =+−−+
dx8x2x4x3x
2
2
En general, cuando se trata de integrales de funciones racionales, y si el grado del numerador es menor que el del denominador, se descompone en factores el denominador teniendo en cuenta los siguientes casos:
1) por cada raíz simple a, aparecerá un sumando de la forma ax
A−
2) por cada raíz múltiple b, aparecerán tantos sumandos como veces se repita
la raíz, es decir si k es el orden de multiplicidad de la raíz la descomposición
será: ( ) ( ) ( )k
k3
32
21
bx
A ...
bx
A
bx
Abx
A
−++
−+
−+
−
3) por cada factor irreducible (raíces complejas) de segundo grado ax2 +bx+c
aparecerá un sumando de la forma: cbxax
BAx2 ++
+
Si el grado del numerador es mayor o igual que el del denominador, se realiza la división de los polinomios para transformar la integral inicial en suma de dos integrales, una de ellas polinómica (inmediata) y la otra de alguno de los casos anteriores.

Colegio Vizcaya Matemáticas II
233
INTEGRAL INDEFINIDA: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II 1. Calcula la primitiva de la función f(x) = 3+2x que cumpla F(-1) = 3. 2. Calcula las siguientes integrales:
a) ∫ dxx3 5 b) ∫ dxx
14
c) ∫ dxx3
d) ∫ + dx)32( x e) ∫ dx)3 · 2( x f) ∫ − senxdx 3
g) ∫ ++ − dx)x5xx( 21 h) ∫ + dx)x21( 2 i) ∫ dxx ·x 32
j) ∫ + dxx )·1x( 31
k) ∫ − dxx)·1x2( 3 4 l) dxx
x3 2∫
m) dxx
xx22
3
∫ −
− ++ n) ∫ xdxsen2 ñ) dx
x5)x23( 2
∫ +
o) dx5x
1∫ + p) dx
xx12
3
∫ − q) ∫ xdx4cos
r) ∫ − dxe x
3. Calcula, por el método del cambio de variable, las siguientes integrales:
a) ∫ dxe · senx cosx b) ∫ dxsenx ·x5 32 c) ∫ + dx)5x·cos(x 32
d) dxx1
)arctgx(2
3
∫ + e) dx
1x5x10x6
3
2
∫ +−−
f) dxe
x22x3∫
g) ∫ dx tgx h) ∫ Lnx xdx
i) ∫ +dx
x)(1 · x
5
j) ∫ 2(Lnx) xdx
k) ∫ dx cosx · xsen4 l) ∫ dxxcos2senx
m) ∫ +dx
x1
x54
n) ∫ − dx)7(3x x6 42 ñ) ∫ + dx 1x x 2

Colegio Vizcaya Matemáticas II
234
o) dx7 5x2∫ − p) ∫ − dxx4 2
4. Calcula, por el método de integración por partes, las siguientes integrales:
a) ∫ dx3 · x x b) ∫ dx cosx ·x2 c) ∫ dx sen3x · 2x
d) ∫ dx Lnx · x e) ∫ dx Lnx f) ∫ dx senx · ex
g) ∫ dx arcsenx h) ∫ dx arctgx i) ∫ + dx xcos)1x(
j) ∫ ++ dx x)Ln(1 )2x(
5. Calcula las siguientes integrales de funciones racionales:
a) ∫ −dx
1x2
2 b) ∫ +−−
−dx
2xx2x1x2
23 c) ∫ −
−dx
x3x3
2
d) ∫ −−−
dxxx
1x33
e) dxxx
1xxx23
34
∫ −−−−
f) ∫ −+−−−
dx8x12x6x
2x2x23
2
g) ∫ −++
dx4x3x
3x623
h) dx)1x(
6x2x3
2
∫ −+−
i) ∫ ++ 13x6x
dx2
j) ∫ ++ 8x5x
dx2
k) ∫ −+−
dx4x
1x5x3 2
l) ∫ +−
dx2x3x2
6. Calcula las siguientes integrales:
a) ∫ −−
dx1x
2x32
b) ∫ +− dx)7x5x4( 2 c) ∫ + dx)esenx( x
d) ∫ dx x3 e) ∫ dx x2sen f) ∫ dxx2
g) ∫ +dx
x1
32
h) ∫ + dx)3e( xx2 i) ∫ +++
dx1x
4x2x2
j) ∫ dxe ·x5x4 k) ∫ dx senx · x 2 l) ∫ dx senx ·x2
m) ∫ − 1)dx-(x x2x2 n) ∫ dxe · x 2x2 ñ) ∫ + dx e ·)1x( x2

Colegio Vizcaya Matemáticas II
235
o) ∫ dx cos3x · x p) ∫ dx cosx x3 q) dx1xxx
1x7x223
2
∫ −−+−+
r) ∫ dxx
Lnx s) dx 1x x∫ + t) ∫ + dx)
x2
x3
(4
u) ∫ +− dx)21
x43
x52
( 24 v) ∫ +dx
42senx3 x
w) ∫ − dx 1x x 2
x) ∫ dxx
e x
y) ∫ −dx
)1x(
x32
z) ∫ − dxx1 2
A) ∫ +−dx
x4x3x
2
34 B) ∫ +−
+−dx
2x2x5x42x
2
2
C ∫ ++dx
3x2x
5 )
2
D) ∫ −dx
1x32
E) ∫ −++
dx3xx
1x22
F) ∫ dxx
)Lnx(sen
G) ∫ −− x1)x2(
dx H) ∫ dxcose ·e xx
PROBLEMAS DE SELECTIVIDAD
7. (JULIO 2007) Calcular la primitiva que sigue
dx4x
1xx2
23
∫ −
++
8. (JUNIO 2007) Calcula la siguiente integral indefinida ∫ ++ dx)cbxx(e 2ax
en función de los parámetros a,b y c.
9. (JULIO 2006) Calcular la primitiva que sigue en función de a y b.
∫ + dx e ·x bax2
10. (JUNIO 2006) Calcular el valor de la siguiente integral definida:
dx)1x(x
1x2
1
2
∫ ++
Colegio Vizcaya Matemáticas II
236
11. (JULIO 2005) Calcular la primitiva que sigue en función del parámetro A
donde se supone A > 0.
dxAxAx
22
22
∫ +−
Explica los pasos seguidos para dicho cálculo.
12. (JUNIO 2005) Calcular la primitiva que sigue ∫ − xxdx2
3
Explica los pasos seguidos para dicho cálculo. 13. (JULIO 2004) Calcular la primitiva que sigue en función del valor de A
∫ ++
dx4xAx2
2
14. (JUNIO 2004) Describir en qué consiste el método de integración por partes
para el cálculo de primitivas. Aplicar dicho método para calcular las siguientes primitivas:
∫ dx e · x 2x ∫ dx Lnx x
15. (JULIO 2003) Explicar el proceso para calcular la integral que sigue
∫ −−++
dx)2x)(1x(cbxax2
Aplicar dicho procedimiento al cálculo de ∫ −−+−
dx)2x)(1x(
5x4x2
16. (JULIO 2002) Describir en qué consiste el método de integración por partes. Utilizar dicho método para encontrar una primitiva de la función f(x) = x · cos3x 17. (JUNIO 2002) ¿Cuándo se dice que una función P(x) es una primitiva de otra función f(x)? Encontrar una primitiva de las siguientes funciones
f(x) = )1x)(2x(
x−−
g(x) = x e x

Colegio Vizcaya Matemáticas II
237
18. (JULIO 2001) Hallar una primitiva de las siguientes funciones
f(x) = cos3 x g(x) = 1x4
12 +
Utilizando dichas primitivas hallar el valor de las siguientes integrales definidas
∫π
0
3 dx xcos ∫ +21
02 1x4dx
19. (JUNIO 2001) Enunciar la fórmula de Barrow para el cálculo de integrales
definidas. Aplicar dicha fórmula para calcular la siguiente integral definida:
∫ ++
2
1 )3x)(2x(dx
20. (JULIO 2000) Describir en qué consiste el método de integración por partes y aplicarlo para hallar la siguiente primitiva
dx Lnx )xx( 2n∫ + donde se supone que n≥3 es un número natural.
21. (SEPTIEMBRE 1999) Encontrar una primitiva de la función f(x) = x 2 · senx
cuyo valor para x= π sea 4.
CUESTIONES 22. Halla la ecuación de una curva que pasa por el punto A(1,-4), sabiendo que la
pendiente de la recta tangente a dicha curva en cualquier punto viene dada por la función f(x) = 3x 2 +3.
23. Calcula la función F(x) que cumple F’’(x) = 6x+1, F(0) = 1 y F(1)=0.
24. Determina la función f(x) sabiendo que f ’’(x) = x·Lnx, f ‘(1)=0 y f(e)= 4e
.
25. Calcula la expresión de una función f(x) tal que f ‘(x) = x e2x− y f(0)=
21
.
26. Se sabe que la gráfica de una función f pasa por el punto (1,1) y que f ‘(1)=2. Se conoce también que la derivada segunda es la función g(x) = 2. Calcula razonadamente la función f. 27. Encontrar la función cuya derivada segunda es la constante 2, y cuya gráfica presenta un mínimo en el punto (1,2).
Colegio Vizcaya Matemáticas II
238

Colegio Vizcaya Matemáticas II
239
UNIDAD DIDÁCTICA 13
INTEGRAL DEFINIDA
2º BACHILLER
Colegio Vizcaya Matemáticas II
240
OBJETIVOS DIDÁCTICOS
1. Aproximar por exceso y por defecto, mediante rectángulos, el área encerrada por una curva.
2. Conocer el concepto de integral definida, así como sus propiedades. 3. Conocer el teorema fundamental del cálculo integral. 4. Aplicar la regla de Barrow al cálculo de áreas de superficies.
CONCEPTOS
1. Integral definida: definición y propiedades
2. Teorema de la media. Teorema fundamental del cálculo integral 3. Regla de Barrow 4. Área bajo una curva 5. Área encerrada por dos curvas.
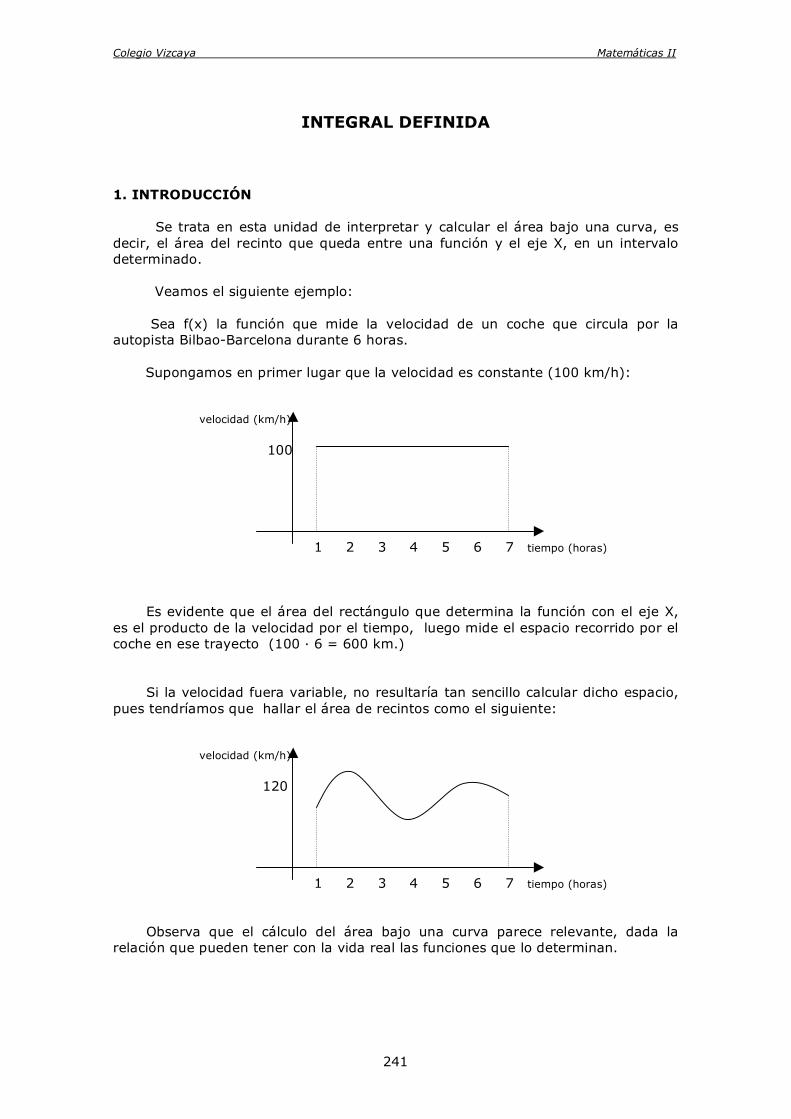
Colegio Vizcaya Matemáticas II
241
INTEGRAL DEFINIDA
1. INTRODUCCIÓN Se trata en esta unidad de interpretar y calcular el área bajo una curva, es decir, el área del recinto que queda entre una función y el eje X, en un intervalo determinado. Veamos el siguiente ejemplo: Sea f(x) la función que mide la velocidad de un coche que circula por la autopista Bilbao-Barcelona durante 6 horas. Supongamos en primer lugar que la velocidad es constante (100 km/h): velocidad (km/h) 100 1 2 3 4 5 6 7 tiempo (horas) Es evidente que el área del rectángulo que determina la función con el eje X, es el producto de la velocidad por el tiempo, luego mide el espacio recorrido por el coche en ese trayecto (100 6 = 600 km.) Si la velocidad fuera variable, no resultaría tan sencillo calcular dicho espacio, pues tendríamos que hallar el área de recintos como el siguiente: velocidad (km/h) 120 1 2 3 4 5 6 7 tiempo (horas) Observa que el cálculo del área bajo una curva parece relevante, dada la relación que pueden tener con la vida real las funciones que lo determinan.
Colegio Vizcaya Matemáticas II
242
2. ÁREA DE RECINTOS PLANOS Dada una función f(x) continua en [a,b], trataremos de medir el área del recinto determinado por la curva, el eje X y las rectas verticales x=a y x=b.
. Para ello, dividiremos la región en rectángulos y sumaremos las áreas de cada uno. Eso nos facilitará aproximaciones por exceso o defecto al área que buscamos A. Dividiremos en primer lugar el intervalo [a,b] en subintervalos: [a, x
1], [x
1,x2], [x
2,x3], … [x
1n,b] siendo {a, x
1, x
2, x
3, … , x
1n, b} una
partición del intervalo [a,b] a=x0<x
1<x
2< … <x
n=b.
(Podemos elegir todos los intervalos de la misma amplitud por comodidad, aunque no tienen por qué serlo) Cada intervalo servirá de base a los rectángulos que pretendemos construir. Aplicamos en cada subintervalo el teorema de Weierstrass que afirma que si la función f(x) es continua en un intervalo cerrado, alcanza necesariamente en dicho intervalo un valor máximo y un valor mínimo. (La hipótesis inicial garantiza la continuidad de la función) Si trazamos los rectángulos cuya altura coincide con el valor mínimo del subintervalo (m
i) y sumamos las áreas respectivas, obtendremos una
aproximación por defecto del área que buscamos. s
1 = (x
1- a) m
1 + (x
2-x1) m
2 + . . . + (b - x
1n) m
n A
Si trazamos, por el contrario, los rectángulos de altura máxima (M
i) y
sumamos sus áreas, obtendremos una aproximación por exceso del área buscada. S
1 = (x
1- a) M
1 + (x
2-x1) M
2 + . . . + (b - x
1n) M
n A
(La zona oscura coincide con s1 y la clara con S
1)
Colegio Vizcaya Matemáticas II
243
Llamaremos suma inferior / suma superior respectivamente, a la suma de la áreas de los rectángulos de altura mínima / máxima en cada partición. Si aumentamos el número de rectángulos, ambas aproximaciones se afinan ya que las sumas inferiores aumentan y las superiores disminuyen.
** Construcciones de Manuel Sada** Por tanto, cada vez que aumentamos un rectángulo más, observamos que la suma de las áreas inferiores forma una sucesión creciente y acotada superiormente por A, es decir: s
1 s
2 s
3 . . . s
n A
y las suma superiores forman una sucesión decreciente y acotada inferiormente por A: S
1 S
2 S
3 . . . S
n A
Parece evidente que a medida que el número de rectángulos aumenta infinitamente, ambas sucesiones se acercan más al área buscada A. La coincidencia con dicha área se producirá en el límite cuando el número de rectángulos tiende a
, es decir:
nn
slim = A = n
n
Slim
Colegio Vizcaya Matemáticas II
244
Definición: Dada una función f(x) continua en [a,b], llamamos integral definida
de f en el intervalo [a,b] y lo escribimos b
a
dx)x(f , al límite común de ambas
sucesiones, que mide el área orientada del recinto limitado por la función f(x), el eje X y las rectas verticales x=a y x=b.
b
a
dx)x(f = n
n
slim = n
n
Slim = A
**Si la función es negativa, la integral también lo es, pues el mínimo y el máximo de cada subintervalo serían negativos. De ahí la expresión área orientada, pues dependiendo del signo de la función, será necesario añadir un valor absoluto a la integral para que represente un área** Actividad: 1. Determina el área aproximada por exceso y por defecto del recinto limitado por la gráfica de la función f(x) = x 2 en el intervalo [1,4], realizando una partición de tres intervalos iguales. Realiza la misma aproximación considerando la función f(x) = - x 2 2. (JUNIO 03) Sea f(x)= 4-2x 2 . Se considera el intervalo I=[-2,3] y la partición suya P={-2,-1,2,3}. Calcula la suma superior y la suma inferior de dicha función correspondientes al intervalo I y a la partición P. 3. PROPIEDADES DE LA INTEGRAL DEFINIDA
1. a
a
dx)x(f = 0
Es evidente que el área de un segmento es 0.
2. Si c es un punto del intervalo (a,b), se verifica: b
a
dx)x(f = c
a
dx)x(f + b
c
dx)x(f
Esta propiedad indica que el área total se puede calcular como la suma de las áreas de recintos parciales. a c b
3. b
a
dx)x(f = -a
b
dx)x(f
4. ( )+b
a
dx)x(g)x(f = b
a
dx)x(f + b
a
dx)x(g
5. b
a
dx)x(f · k = k b
a
dx)x(f

Colegio Vizcaya Matemáticas II
245
4. TEOREMA DEL VALOR MEDIO Si f(x) es una función continua en [a,b], entonces existe un punto c (a,b) tal que:
b
a
dx)x(f = f(c) (b-a)
**El teorema asegura que el área del recinto coincide con la de un rectángulo de base el intervalo [a,b] y de altura f(c) siendo c un punto del intervalo f(x) f(c) a c b Demostración: Por ser f(x) una función continua en [a,b], alcanza en dicho intervalo un valor máximo M y un valor mínimo m (teorema de Weierstrass). Por tanto se cumplirá: m f(x) M en cualquier x [a,b] y las áreas de los recintos que determinan con el eje X, mantendrán la misma desigualdad:
b
a
mdx b
a
dx)x(f b
a
Mdx
Por ser m y M funciones constantes, determinan recintos en forma de rectángulo,
de donde se deduce que b
a
mdx = m (b-a) y b
a
Mdx = M (b-a). Sustituyendo:
m (b-a) b
a
dx)x(f M (b-a) y dividiendo la desigualda entre (b-a)
obtenemos:
m ab
1 b
a
dx)x(f M
y aplicando ahora el teorema de Darboux o de los valores intermedios, podemos
asegurar que existe un punto c (a,b) tal que: ab
1 b
a
dx)x(f = f(c) , es decir,
b
a
dx)x(f = f(c) (b-a) c.q.d.

Colegio Vizcaya Matemáticas II
246
5. TEOREMA FUNDAMENTAL DEL CÁLCULO INTEGRAL Veamos ahora la relación que existe entre el concepto de área de un recinto determinado por una función y el de integral entendida como primitiva de dicha función. Definición: Dada una función f(x) continua en el intervalo [a,b], llamamos
Función Área a la función F(x) = x
a
dt)t(f que mide el área bajo la función f(x)
desde un punto a hasta un punto variable x [a,b].
Formulamos ahora el teorema: TEOREMA FUNDAMENTAL DEL CÁLCULO INTEGRAL Si f(x) es una función continua en el intervalo [a,b], entonces se cumple que
F(x) = x
a
dt)t(f es una primitiva de f(x), es decir, F’ (x) = f(x).
Demostración:
Sabemos que F’ (x) = h
)x(F)hx(Flim0h
+ =
h
dt)t(fdt)t(f
lim
hx
a
x
a
0h
+
=
= h
dt)t(f
lim
hx
x
0h
+
= h
h )·c(flim
0h = )c(flim
0h = f(x) c.q.d.
Como c (x, x+h) si h tiende a 0, c debe tender a x ( ) x c x+h Por ser f continua en [a,b], podemos aplicar el teorema del valor medio en el intervalo [x, x+h]. Se deduce entonces que existe un punto c (x, x+h) tal que:
+hx
x
f(t)dt = f(c) (x+h-x) = f(c) h
Se demuestra entonces que la función área es una primitiva de f(x). Por esa razón el cálculo de áreas está asociado al cálculo de integrales.

Colegio Vizcaya Matemáticas II
247
Veamos ahora cómo calcular en la práctica dichas integrales definidas. 6. REGLA DE BARROW Si f(x) es una función continua en [a,b] y F(x) es una primitiva de f(x), entonces se cumple:
b
a
dx)x(f = F(b) – F(a)
Demostración:
Sabemos que si F(x) = x
a
dx)x(f
es una primitiva de f(x), entonces F(x) + C
también lo será y por tanto:
x
a
dx)x(f
= F(x) + C
En el caso x=a a
a
dx)x(f
= F(a) + C = 0 C = -F(a)
En el caso x=b b
a
dx)x(f
F(b) + C y sustituyendo la igualdad anterior
obtenemos:
b
a
dx)x(f
= F(b) – F(a) c.q.d.
Ejemplo:
dx)2x(3
1
+
= 3
1
2
x22
x+ = ++ 2
2
16
2
322
= 22
16
2
9+ = 8
Veamos gráficamente que el área de la región comprendida entre la función f(x)=x+2, el eje X y las rectas verticales x=1 y x=3, es 8 u 2 : Si dividimos la región en un rectángulo y un 5 triángulo y sumamos las áreas respectivas, obtenemos: 3 área del rectángulo: 3 2 = 6
área del triángulo: 2
2·2 = 2
1 2 3
Área total 6+2 = 8 u 2
Colegio Vizcaya Matemáticas II
248
Actividad: 3. Calcula las siguientes integrales:
a) e2
e
dxx
1
b) +3
1
2 dx)x2x( c) +
0
12
dx1x
x2
c) Halla el valor de a>0 para el que =+a
0 2
21dx)2x(
En el siguiente ejemplo comprobaremos que la integral definida mide el área “orientada” bajo la curva f(x), es decir, la integral mantiene el mismo signo que la función. Ejemplo: Dada la función f(x) = x, hallar el área de la región comprendida entre x=0 y x=3. -3 3
Por tratarse de un triángulo sabemos que área = 2
h·b =
2
3·3 = 2
9 u 2
Evidentemente el resultado es el mismo si utilizamos la integral definida:
3
0
xdx = 3
0
2
2
x =
2
0
2
9 = 2
9
Veamos ahora lo que ocurre si calculamos el área entre x=-3 y x=0. El triángulo, aunque invertido, tendrá la misma área, pero la integral resulta negativa:
0
3
xdx
= 0
3
2
2
x =
2
9
2
0 = -
2
9
Lógicamente, si pretendemos calcular dicha área, debemos poner la integral en valor absoluto, pues debe ser de signo positivo.
Área = 0
3
xdx = 2
9 = 2
9 u 2

Colegio Vizcaya Matemáticas II
249
7. ÁREA DE UNA REGIÓN PLANA Para calcular el área determinada entre una función continua f(x) y el eje X en un intervalo [a,b], estableceremos tres casos según el signo de la función: 7.1 f(x) es continua y positiva en [a,b]
El área viene dada directamente por la integral definida.
f(x) A Área = b
a
dx)x(f
a b Ejemplo: Hallar el área comprendida entre la función f(x) = x 2 , el eje X y las rectas x=1, x=2.
Área = 2
1
2dxx =
2
1
3
3
x =
3
1
3
8 = 3
7 u 2
1 2
7.2 f(x) es continua y negativa en [a,b]
El área viene dada por el valor absoluto de la integral definida en dicho intervalo. a b
A A = b
a
dx)x(f
f(x) Ejemplo: Hallar el área de la región comprendida entre la función f(x) = x 3 , el eje X y las rectas verticales x= -2 , x= -1.
-2 -1 A = 1
2
3dxx =
1
2
4
4
x =
( ) ( )4
2
4
144
= 44
1 =
4
15u 2
A

Colegio Vizcaya Matemáticas II
250
7.3 f(x) es continua y cambia de signo en [a,b]
A1 A
3
a c d b A
2
En este caso es necesario calcular los puntos de corte (c, d), de la función con el eje X, para determinar las distintas regiones que se forman con el eje X. El área total será la suma de las áreas parciales, añadiendo un valor absoluto a la integral en el caso de las zonas negativas.
A = A1+ A
2+ A
3 =
c
a
dx)x(f + d
c
dx)x(f + b
d
dx)x(f
Ejemplo: Hallar el área determinada por la función f(x) = senx y el eje X en el intervalo [0, 2 ]. A
1
A2 2
A = A1+ A
2 =
0
senxdx + 2
senxdx = 2
0
senxdx = 2 [-cosx]0=
Por simetría = 2 [-cos - (-cos0)] = 2 [-(-1) + 1] = 4 u 2 Si hubiésemos calculado la integral entre 0 y 2 , el resultado sería 0, pues al ser opuestas ambas zonas, se contrarrestarían entre sí. Veámoslo:
2
0
senxdx = [-cosx] 20
= (-cos2 ) – (-cos0) = 0+0=0
Actividades: 4. Calcula el área de la región limitada por la gráfica de la función f(x) = 4x 3 , las rectas x=-1, x=1 y el eje de abscisas. 5. Calcula el valor de a>0, sabiendo que el área encerrada entre la curva y=ax ,22
+ el eje X y las rectas x=-1 y x=2 es igual a 21.

Colegio Vizcaya Matemáticas II
251
8. ÁREA DE LA REGIÓN LIMITADA POR DOS CURVAS 8.1 Si las funciones f(x) y g(x) no se cortan en el intervalo [a,b] f(x) A g(x) a b Lógicamente, como la integral entre a y b mide el área del recinto determinado por cada función y el eje X, A será la resta entre el recinto formado por f(x) y el formado por g(x), es decir:
A = [ ]b
a
dx)x(g)x(f
Ejemplo: Hallar el área de la región comprendida entre las funciones y= x 2 , y=x+2.
a) Se dibuja previamente el recinto formado por ambas funciones
b) Se calculan los puntos de intersección de ambas funciones. Serán los límites de integración.
+=
=
2xy
xy 2
x 2=x+2 x 2 -x-2=0 x = 2
811 +± =
1
2
c) Se calcula la integral de la resta de ambas funciones ( la de encima manos la de debajo) entre dichos límites de integración.
A = [ ]dx2
1
+
2x-2)(x =2
1
32
3
xx2
2
x+ = ==++
6
7
3
10
3
12
2
1
3
842
2
9
6
27= u 2

Colegio Vizcaya Matemáticas II
252
8.2 Si las funciones f(x) y g(x) se cortan en el intervalo [a,b] En este caso se calculan los puntos de intersección y se divide la región en subintervalos y se suman la áreas respectivas. Ejemplo:
Hallar el área del recinto formado por las funciones f(x) = x 3 y f(x) = x.
PUNTOS DE INTERSECCIÓN
=
=
xy
xy 3
x 3 - x = 0 x(x 2 -1)=0 ±==
=
1 x 01x
0x
2
Área = dx)x1
0
3(x + 1
3x-(x0
dx) = 0
1
24
2
x
4
x+
1
0
42
4
x
2
x =
= + 04
1
2
1
2
1
4
10 =
4
1 + 4
1 = 2
u2
1
Es evidente que en este caso, por simetría, es más rápido e igualmente cierto que:
Área = 21
3x-(x0
dx)
Actividades: 6. Halla el área de la superficie limitada por las curvas y = x 4
2 e y = -2x 82+
y representa gráficamente la figura resultante. 7. Calcula el área comprendida entre las curvas y = 4 - x 2 e y = x 4
2 8. Halla el área del recinto limitado por los ejes de coordenadas, la recta y=2 y la
curva de ecuación y= 2x . 9. Halla el área del recinto limitado por la parábola y=x 2 -1, la recta y=5–x y el eje X.

Colegio Vizcaya Matemáticas II
253
INTEGRAL DEFINIDA: EJERCICIOS, PROBLEMAS Y CUESTIONES MATEMÁTICAS II 1. (JUNIO 2006) Calcular el valor de la siguiente integral definida:
dx)1x(x
1x2
1
2
+
+
2. (JULIO 2001) Hallar una primitiva de las siguientes funciones
f(x) = cos 3x g(x) = 1x4
1
2+
Utilizando dichas primitivas hallar el valor de las siguientes integrales definidas
0
3dx xcos
+
2
1
021x4
dx
3. (JUNIO 2001) Enunciar la fórmula de Barrow para el cálculo de integrales
definidas. Aplicar dicha fórmula para calcular la siguiente integral definida:
++
2
1 )3x)(2x(
dx
4. (JULIO 01) Se considera el intervalo I=[0,16] y la partición suya dada por
P={0,4,8,12,14,16}. Sea la función f definida por f(x) = |x – 7| Calcula la suma superior y la suma inferior de dicha función correspondientes al
intervalo I y a la partición P. 5. Calcula el área de la región limitada por la gráfica de la función f(x) = cosx, las
rectas x=0 , x=2 y el eje de abscisas.
6. Calcula el área de la región limitada por la gráfica de la función f(x)=x 3x4
2+ ,
las rectas x=1 , x=3 y el eje de abscisas. 7. Halla el área del recinto limitado por la parábola y=x 2 y las rectas y=x, y=2x. 8. Halla el área del recinto limitado por la función y = 2x-x 2 y sus tangentes en
los puntos en los que corta al eje de abscisas. 9. Demuestra que el área del círculo es 2
r . (Recuerda que la ecuación de la
circunferencia de centro O y radio r es x 222 ry =+ )
Colegio Vizcaya Matemáticas II
254
PROBLEMAS DE SELECTIVIDAD
10. (JULIO 2008) Se considera el recinto del plano limitado por las rectas y = 4x,
y = 8 - 4x y la curva y = 2x - x 2 , y situado en el primer cuadrante. Trazar un esquema gráfico del recinto y calcular su área mediante cálculo
integral. 11. (JUNIO 2008) Sea R el rectángulo del plano con vértices en los puntos
V1(0,0), V
2(3,0), V
3(3,9) y V
4(0,9). Demostrar que para todo valor de A la
curva de ecuación y = Ax 2+ (3-3A)x pasa por los vértices V1 y V 3 y divide al
rectángulo en dos regiones. Calcular el área de dichas regiones y encontrar el valor de A para que la
región situada por encima de la curva tenga un área doble que la situada por debajo de la curva.
12. (JULIO 2007) La parábola y = 4 - x 2 , su recta tangente en x=1 y el eje OY limitan un recinto finito del plano.
Dibujar un esquema de dicho recinto y hallar su área mediante el cálculo integral.
13. (JUNIO 2007) Sea P 1 la parábola de ecuación y = x(4 - x), y sea P 2 la
parábola de ecuación y = (x – 4)(x – 2). Dibujar un esquema gráfico del recinto finito del plano limitado por dichas parábolas. Hallar el área del recinto mediante cálculo integral.
14. (JULIO 2006) Se considera el rectángulo de vértices V
1(0,27), V
2(5,27),
V3(5,-4) y V
4(0,-4). La curva y =x 3 divide a dicho rectángulo en dos zonas.
Trazar un esquema gráfico y calcular el área de cada zona. 15. (JUNIO 2006) La curva y = x 3 , su recta tangente en el punto x=2 y el eje X
limitan en el primer cuadrante un recinto finito del plano. Dibujar un esquema gráfico de dicho recinto y calcular su área.
16. (JULIO 2005) El rectángulo de vértices V
1(0,0), V
2(A,0), V
3(0,A 2 ) y
V4(A,A 2 ) queda dividido en dos recintos por la curva de ecuación f(x)= x(A-x).
Trazar un esquema de ambos recintos y calcular sus áreas. 17. (JUNIO 2005) Enunciar la regla de Barrow y explicar cómo se utiliza para el
cálculo de áreas de figuras planas. Usar dicha fórmula para calcular el área del recinto limitado por la gráfica
de la función f(x) = x 42 , el eje X y la recta x=3.
18. (JULIO 2004) Se considera el recinto finito del plano limitado por la recta
x=1, la parábola y=x 2 y la curva y = x
8.
Colegio Vizcaya Matemáticas II
255
19. (JUNIO 2004) La curva y = x 1x22
+ y la recta que pasa por los puntos A(1,0) y B(3,4) limitan un recinto finito del plano.
Dibujar un esquema gráfico de dicho recinto y calcular su área. 20. (JULIO 2003) Trazar un esquema gráfico del recinto finito del plano limitado
por las rectas y=16x, y=9x y la curva y=x
1 y situado en el primer
cuadrante. Calcular el área de dicho recinto. 21. (JUNIO 2003) La recta y = 3x+2 y la curva y = x 3 limitan un recinto finito
del plano. Trazar un esquema gráfico de dicho recinto y calcular su área. 22. (JULIO 2002) La curva y = x 3 , el eje OY y la curva y = 16 – 2x 2 limitan un
recinto finito del plano. Trazar un esquema gráfico de dicho recinto y calcular su área haciendo uso del cálculo integral.
23. (JUNIO 2002) La curva y = 2x 2 divide al cuadrado de vértices V
1(0,0),
V2(1,0), V
3(1,1) y V
4(0,1) en dos recintos.
Dibujar dichos recintos y hallar el área de cada uno de ellos. 24. (JUNIO 2001) Las rectas r
1y - 8x = 0 y r
2 y – x =0 limitan junto con
la curva y = 2x
24
+ un recinto del plano.
Trazar un esquema gráfico de dicho recinto y calcular el área de la parte del recinto situada en el primer cuadrante del plano, mediante una integración adecuada.
25. (JULIO 2000) Las curvas y = 7 + sen cosx · x
2 e y = 2 – x determinan, junto con x=0 y x= , un recinto del plano. Trazar un esquema gráfico de dicho recinto y calcular su área.
26. (Septiembre 1997) Se considera para cada número natural n la curva C
n de
ecuación y = x 2 -4nx+4n 2 . Sea R(n) el recinto finito limitado por la curva Cn,
la curva y = x 2 y el eje OX. Calcular el área de R(n). 27. (JUNIO 1997) Calcular el área del recinto finito limitado por la gráfica de la
función y = x 4 , su recta tangente en el punto (1,1) y el eje OY. 28. (Septiembre 1995) Encontrar el área del recinto plano situado encima del eje
OX y debajo de las curvas y = x 3 , y = 2x
32.

Colegio Vizcaya Matemáticas II
256