solucion taller 1 de control 2
DESCRIPTION
Algunos problemas de controlTRANSCRIPT
TALLER 1 – CONTROL 2SOLUCIÓN
INGENIERÍA ELECTRÓNICAIng. Armando Mateus
Taller para desarrollo en Matlab/Simulink; los ejercicios 1, 2 y 3 deben resolverse desde la ventana de comandos de Matlab y los puntos 4 y 5 que debe resolverse en Simulink.
1. Obtenga la transformada de Laplace para las siguientes funciones; verifique obteniendo la transformada inversa con ayuda de Matlab en cada caso:
a. 4tb. sen(2t)
c. t2 – t + 1
d. sen2(t) + cos2(t)
e. et
Solución:Lo primero que se debe hacer es definir una variable simbólica 't'; esto debe hacerse pues la función 'laplace' calcula la transformada de Laplace de una función simbólica.
>> syms t
Con el comando anterior Matlab “entiende” que se va a utilizar el símbolo 't' como una variable.El paso a seguir es la definición de cada función:
>> f1=4*t f1 = 4*t
>> f2=sin(2*t) f2 = sin(2*t)
>> f3=t^2 - t + 1 f3 = t^2 - t + 1
>> f4=[sin(t)]^2 + [cos(t)]^2 f4 = cos(t)^2 + sin(t)^2
>> f5=exp(t) f5 = exp(t)
De esta forma las 5 funciones quedarían definidas; no es la única forma de definirlas; por ejemplo f1 podría haberse definido también como “f1 = t + t + t + t”. El siguiente paso es la utilización del
comando 'laplace' que permitirá la obtención de la transformada:
>> F1=laplace(f1) F1 = 4/s^2 >> F2=laplace(f2) F2 = 2/(s^2 + 4) >> F3=laplace(f3) F3 = 1/s - 1/s^2 + 2/s^3 >> F4=laplace(f4) F4 = 2/(s*(s^2 + 4)) + (s^2 + 2)/(s*(s^2 + 4)) >> F5=laplace(f5) F5 = 1/(s – 1)
Acá se ha utilizado el nombre de la función en letra mayúscula para indicar que se trata de la transformada; F1 corresponde a la transformada de Laplace de f1 (Matlab diferencia entre minúsculas y mayúsculas).
Un buen ejercicio para verificar la validez de la transformación es realizar la transformación inversa mediante el comando 'ilaplace' (inverse laplace); este comando es también de tipo simbólico, por lo que se hace necesario definir la variable simbólica 's'. En este caso, sin embargo, Matlab automáticamente ha realizado la definición de la variable simbólica al momento de realizar la transformada de Laplace, así que no es necesario realizar la definición.
>> ilaplace(F1) ans = 4*t >> ilaplace(F2) ans = sin(2*t) >> ilaplace(F3) ans = t^2 - t + 1 >> ilaplace(F4) ans = 1
>> ilaplace(F5) ans = exp(t)
Todos los resultados corresponden a la función original; en el caso de 'f4' aunque el resultado a simple vista no parece el mismo debe recordarse que 'sen2(t) + cos2(t) = 1' (propiedad trigonométrica); para este caso también se debe ser consciente de que los algoritmos y resultados de Matlab pueden brindar soluciones no tan claras como se esperan (F4 debería ser simplemente 1/s).
2. Dada la función de transferencia:
a. Defina el sistema lineal correspondiente en Matlabb. Obtenga la representación de la forma zero – polo – ganancia para ese sistemac. Obtenga las respuestas al impulso y al escalónd. Obtenga experimentalmente (caracterización) la función de transferencia del sistemae. Obtenga la función de transferencia G0 para la malla de lazo cerrado
Solución:a.Mediante la definición de la función de transferencia de un sistema se hace la definición del sistema lineal correspondiente; con el comando 'tf' se define en Matlab la función de transferencia de un sistema y por tanto el sistema.
Antes que nada es necesario identificar los polinomios del numerador y el denominador. Para el numerador se tiene:
N(s) = 4 = ...+0s3 + 0s2 + 0s + 4
Acá lo único que se ha hecho es expandir en forma de polinomio el numerador, con esto ya es posible definir en Matlab un vector numerador compuesto por los coeficientes del polinomio así:
>> N=[0 0 0 4] N = 0 0 0 4
Nótese que los 3 primeros coeficientes utilizados son 0 por lo que una forma alterna sería definir el numerador solo así:
>> N=[4] N = 4
El mismo proceso se sigue para el denominador:
D(s) = 2s + 5
Y en Matlab
>> D=[2 5] D = 2 5
Finalmente el sistema lineal quedará definido con la función de transferencia así:
>> G=tf(N,D) Transfer function: 4 ------- 2 s + 5
b. La representación ZPK (cero – polo – ganancia) es una forma alterna de representar una función de transferencia; para ello se factorizan tanto el numerador como el denominador, por ejemplo si
Ge(s) = (4s2 – 12s + 8)/(s3 + 6s2 + 11s + 6) = 4(s – 1)(s – 2)/(s + 1)(s + 2)(s + 3)
La expresión de la derecha donde ya se ha factorizado es conocida como la forma ZPK. La ganancia es 4 (el término sin s), los ceros serán s – 1 y s – 2 (s = 1 y s = 2 producen que la función de transferencia valga cero) y los polos son s + 1, s + 2 y s + 3 (s = -1, s = -2 y s = -3 producen que la función de transferencia tienda al infinito o polo).
Para generar la representación ZPK se utiliza el comando 'zpk', para el caso será:
>> zpk(G) Zero/pole/gain: 2 ------- (s+2.5)
Para este caso en particular, la representación ZPK es la misma función en términos polinomiales (sólo cambia la ganancia); esto es así pues la función no posee ceros y sólo posee un polo.
c.Para obtener la respuesta al impulso y al escalón se utilizan los comandos 'impulse' y 'step' respectivamente; esto puede hacerse pues ya se ha definido el sistema lineal mediante la función de transferencia.
>>impulse(G)
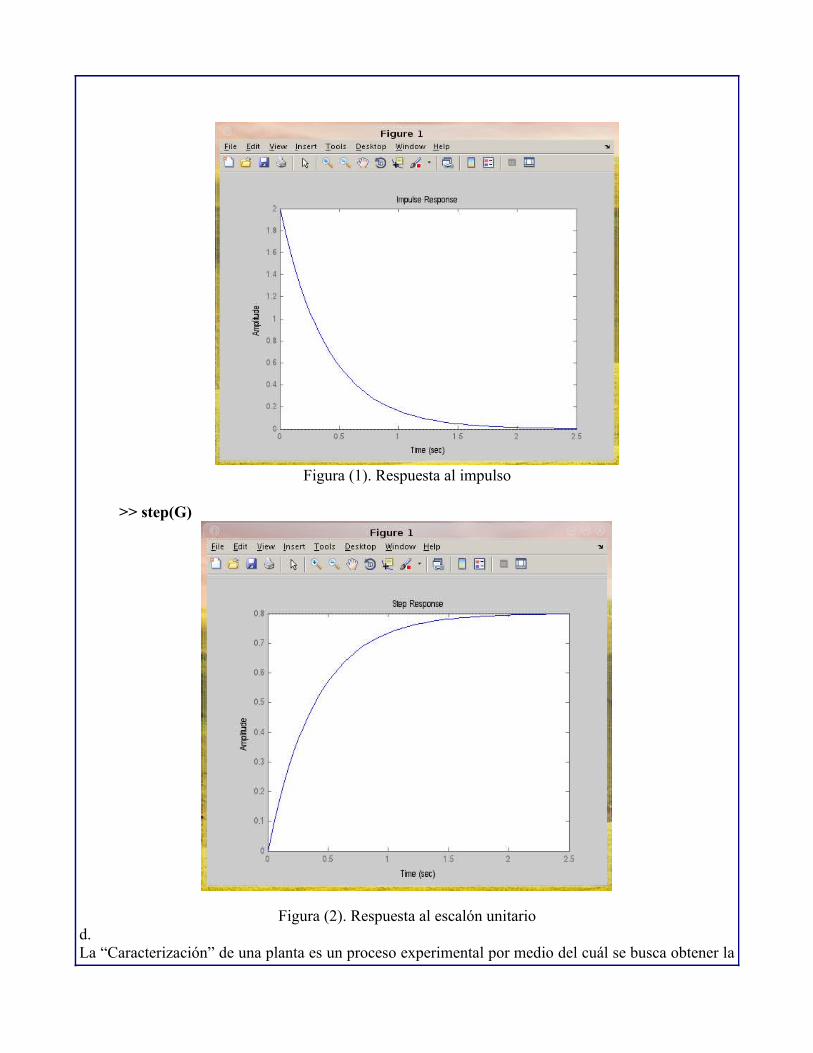
Figura (1). Respuesta al impulso
>> step(G)
Figura (2). Respuesta al escalón unitariod.La “Caracterización” de una planta es un proceso experimental por medio del cuál se busca obtener la
función de transferencia de un sistema a partir de su respuesta en el tiempo. La respuesta al escalón que se presenta en la figura (2) corresponde a un sistema de primer orden cuya función de transferencia es: G(s) = K/(1 + Ts)
Esta función de transferencia tiene una respuesta temporal al escalón (figura 2) determinada por la siguiente expresión matemática:
x(t) = K [1 – e-t/T]
Es claro de la ecuación anterior que cuando t tiende a infinito x(t) vale K
x(∞) = K [1 – 0] = K
De la figura 2, se ve que el valor final de x(t) es 0.8, por tanto K = 0.8.
Para determinar el valor de T buscamos el valor para el cuál x(t) alcanza el 63,2% de su valor final. Esto es así pues cuando t = T se tiene:
x(T) = K [1 – e-T/T] = K [1 – e-1] = K [1 – 0.3678] = K [0.6321] = 63,21% de K
Lo que indica que T es el tiempo para el cuál x(t) alcanza el 63,21% del valor de K.
Para este caso el 63,21% de K es 0.6321*0.8 = 0.5056 se alcanza aproximadamente para t = 0.401, por tanto T = 0.401.
Resumiendo
K = 0.8 T = 0.401
Y la función de transferencia será:
G(s) =0.8 /(1 + 0.401 s)
Esta función de transferencia se transforma mediante la multiplicación arriba y abajo por 5 en:
G(s) = 4 /(5 + 2.005 s) = 4 /(2.005 s + 5)
Está función de transferencia es prácticamente la función original propuesta en el ejercicio. Este procedimiento es muy útil para obtener funciones de transferencia sin necesidad de conocer los parámetros de la planta.
e.Como ya se tiene definida la función G, sólo es necesario definir la función de transferencia en lazo cerrado; se recuerda que la función de transferencia en lazo cerrado de una función es:
Go(s) = G(s)/(s+G(s))
>> Go=G/(G+1) Transfer function: 8 s + 20 ----------------- 4 s^2 + 28 s + 45
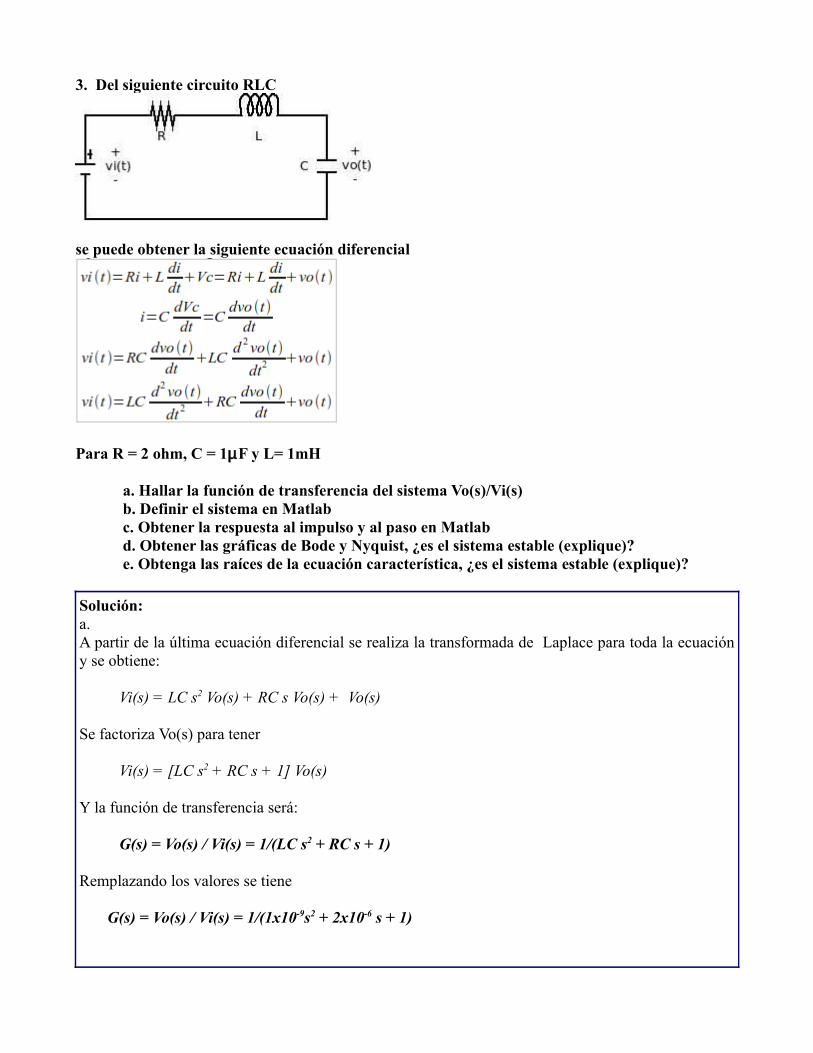
3. Del siguiente circuito RLC
se puede obtener la siguiente ecuación diferencial
Para R = 2 ohm, C = 1µF y L= 1mH
a. Hallar la función de transferencia del sistema Vo(s)/Vi(s)b. Definir el sistema en Matlabc. Obtener la respuesta al impulso y al paso en Matlabd. Obtener las gráficas de Bode y Nyquist, ¿es el sistema estable (explique)?e. Obtenga las raíces de la ecuación característica, ¿es el sistema estable (explique)?
Solución:a.A partir de la última ecuación diferencial se realiza la transformada de Laplace para toda la ecuación y se obtiene:
Vi(s) = LC s2 Vo(s) + RC s Vo(s) + Vo(s)
Se factoriza Vo(s) para tener
Vi(s) = [LC s2 + RC s + 1] Vo(s)
Y la función de transferencia será:
G(s) = Vo(s) / Vi(s) = 1/(LC s2 + RC s + 1)
Remplazando los valores se tiene
G(s) = Vo(s) / Vi(s) = 1/(1x10-9s2 + 2x10-6 s + 1)
b.Para definir el sistema se realiza la definición de la función de transferencia:
>> G=tf(1,[0.000000001 0.000002 1]) Transfer function: 1 ------------------------- 1e-009 s^2 + 2e-006 s + 1
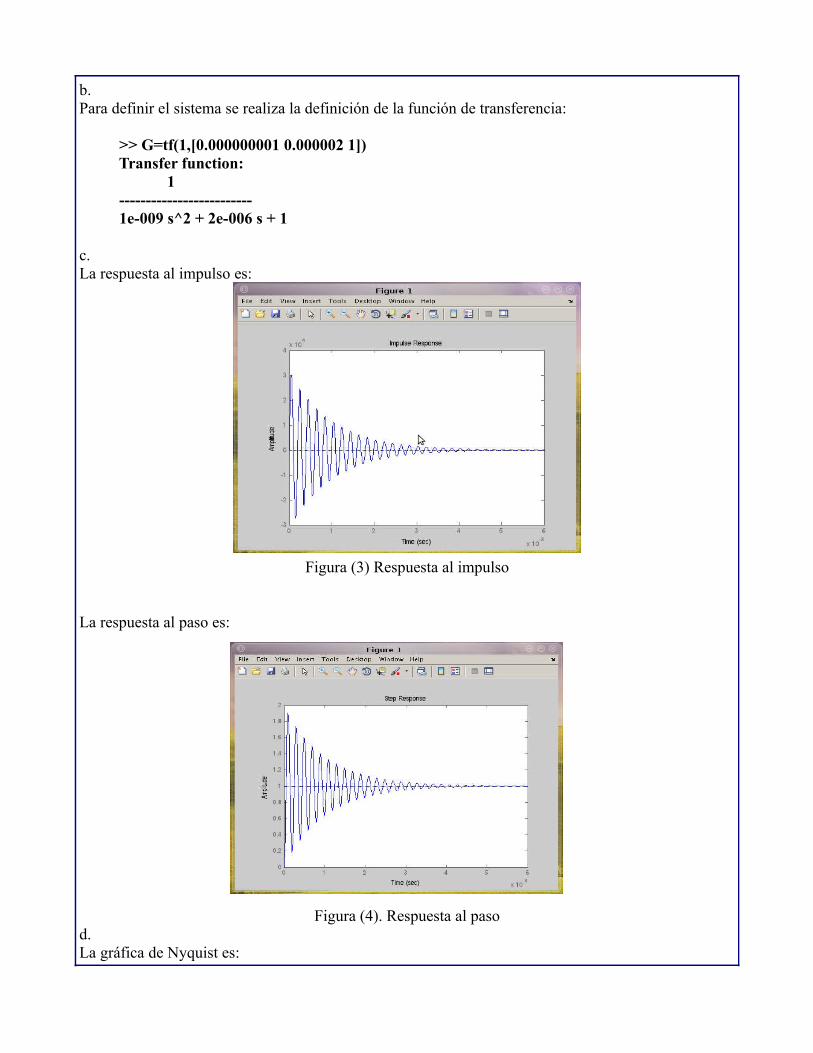
c.La respuesta al impulso es:
Figura (3) Respuesta al impulso
La respuesta al paso es:
Figura (4). Respuesta al pasod.La gráfica de Nyquist es:
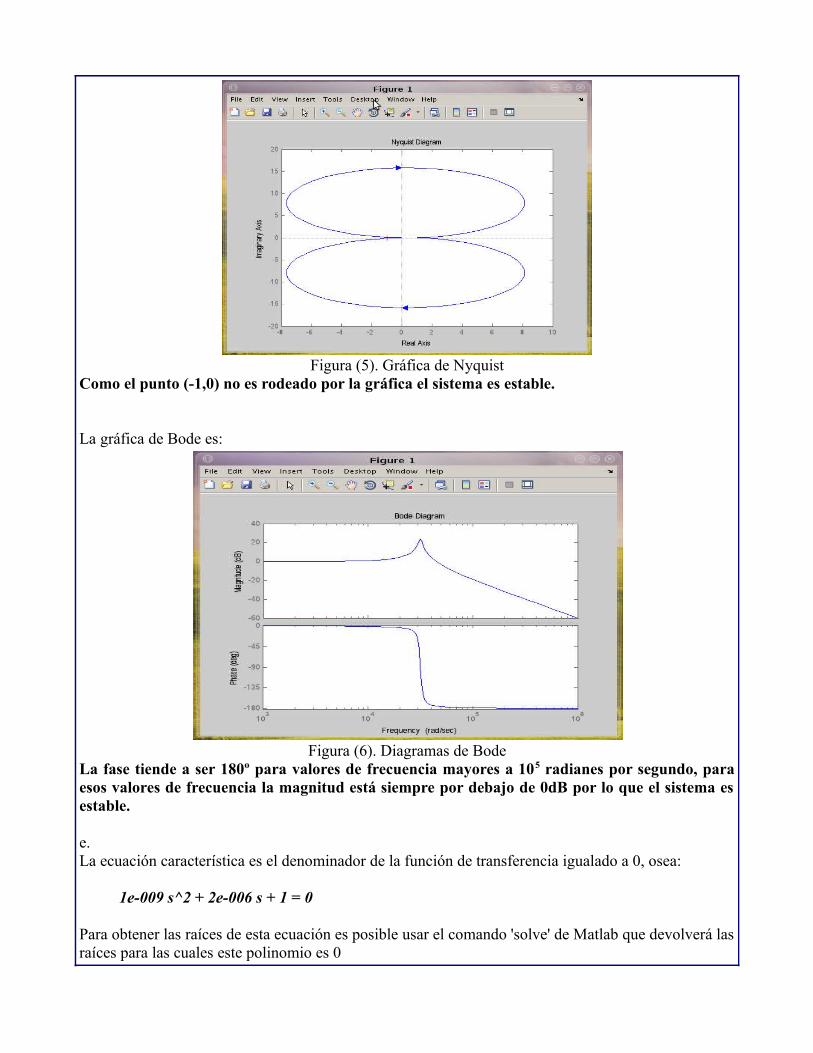
Figura (5). Gráfica de NyquistComo el punto (-1,0) no es rodeado por la gráfica el sistema es estable.
La gráfica de Bode es:
Figura (6). Diagramas de BodeLa fase tiende a ser 180º para valores de frecuencia mayores a 105 radianes por segundo, para esos valores de frecuencia la magnitud está siempre por debajo de 0dB por lo que el sistema es estable.
e.La ecuación característica es el denominador de la función de transferencia igualado a 0, osea:
1e-009 s^2 + 2e-006 s + 1 = 0
Para obtener las raíces de esta ecuación es posible usar el comando 'solve' de Matlab que devolverá las raíces para las cuales este polinomio es 0
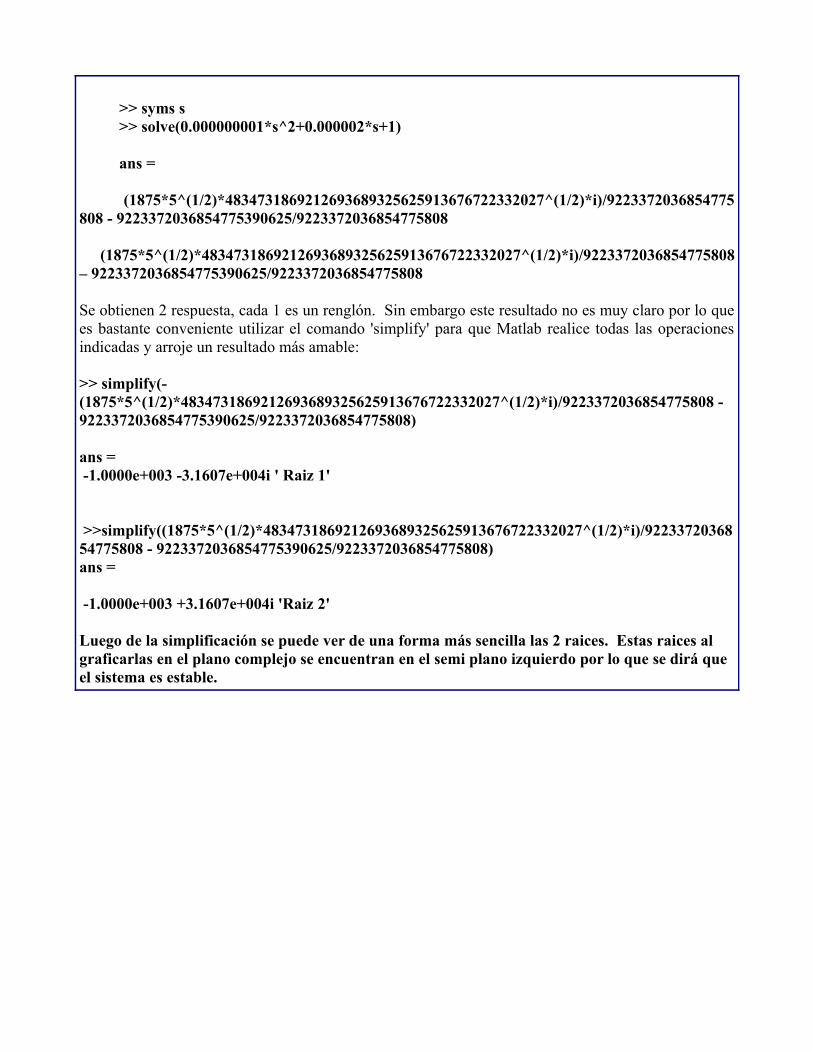
>> syms s >> solve(0.000000001*s^2+0.000002*s+1)
ans = (1875*5^(1/2)*4834731869212693689325625913676722332027^(1/2)*i)/9223372036854775808 - 9223372036854775390625/9223372036854775808
(1875*5^(1/2)*4834731869212693689325625913676722332027^(1/2)*i)/9223372036854775808 – 9223372036854775390625/9223372036854775808
Se obtienen 2 respuesta, cada 1 es un renglón. Sin embargo este resultado no es muy claro por lo que es bastante conveniente utilizar el comando 'simplify' para que Matlab realice todas las operaciones indicadas y arroje un resultado más amable:
>> simplify(- (1875*5^(1/2)*4834731869212693689325625913676722332027^(1/2)*i)/9223372036854775808 - 9223372036854775390625/9223372036854775808)
ans = -1.0000e+003 -3.1607e+004i ' Raiz 1'
>>simplify((1875*5^(1/2)*4834731869212693689325625913676722332027^(1/2)*i)/9223372036854775808 - 9223372036854775390625/9223372036854775808)ans =
-1.0000e+003 +3.1607e+004i 'Raiz 2'
Luego de la simplificación se puede ver de una forma más sencilla las 2 raices. Estas raices al graficarlas en el plano complejo se encuentran en el semi plano izquierdo por lo que se dirá que el sistema es estable.
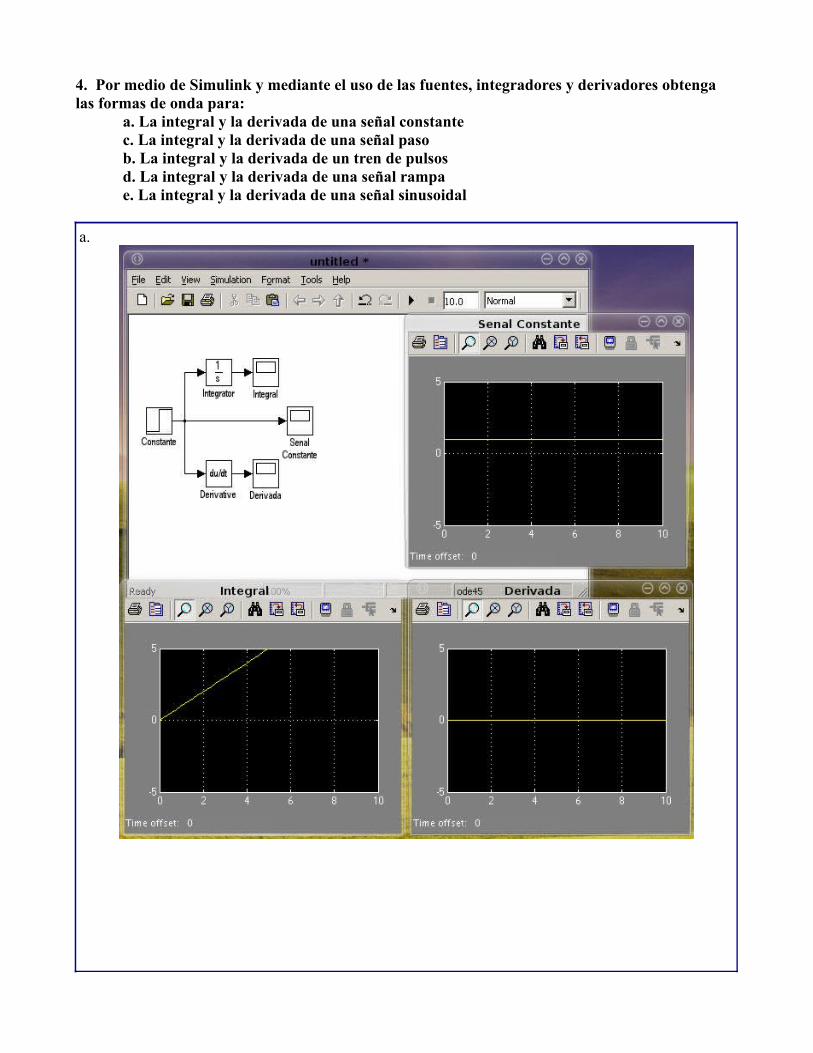
4. Por medio de Simulink y mediante el uso de las fuentes, integradores y derivadores obtenga las formas de onda para:
a. La integral y la derivada de una señal constantec. La integral y la derivada de una señal pasob. La integral y la derivada de un tren de pulsosd. La integral y la derivada de una señal rampae. La integral y la derivada de una señal sinusoidal
a.
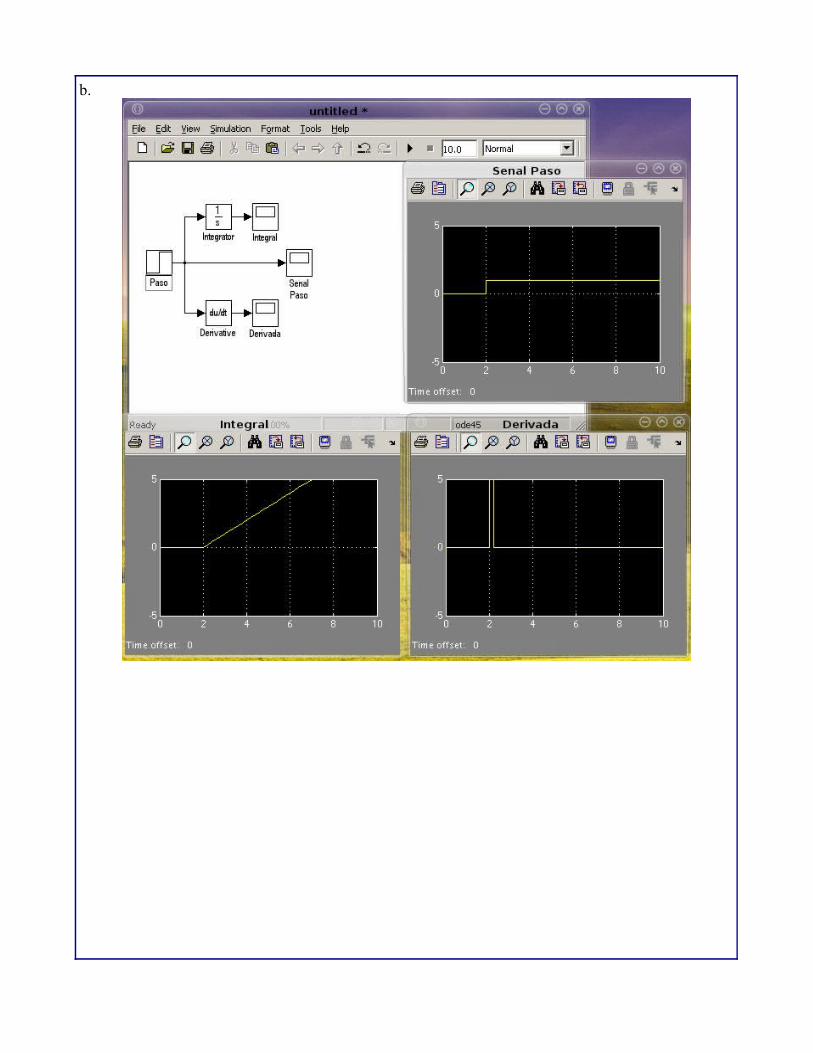
b.
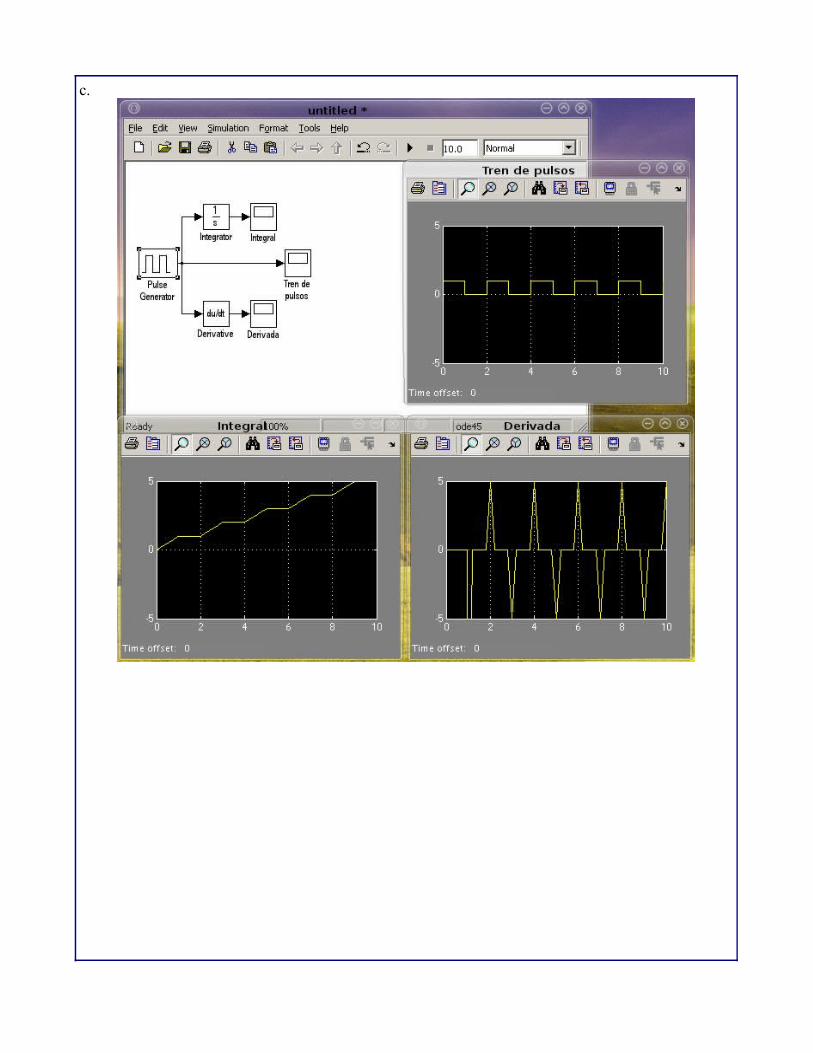
c.
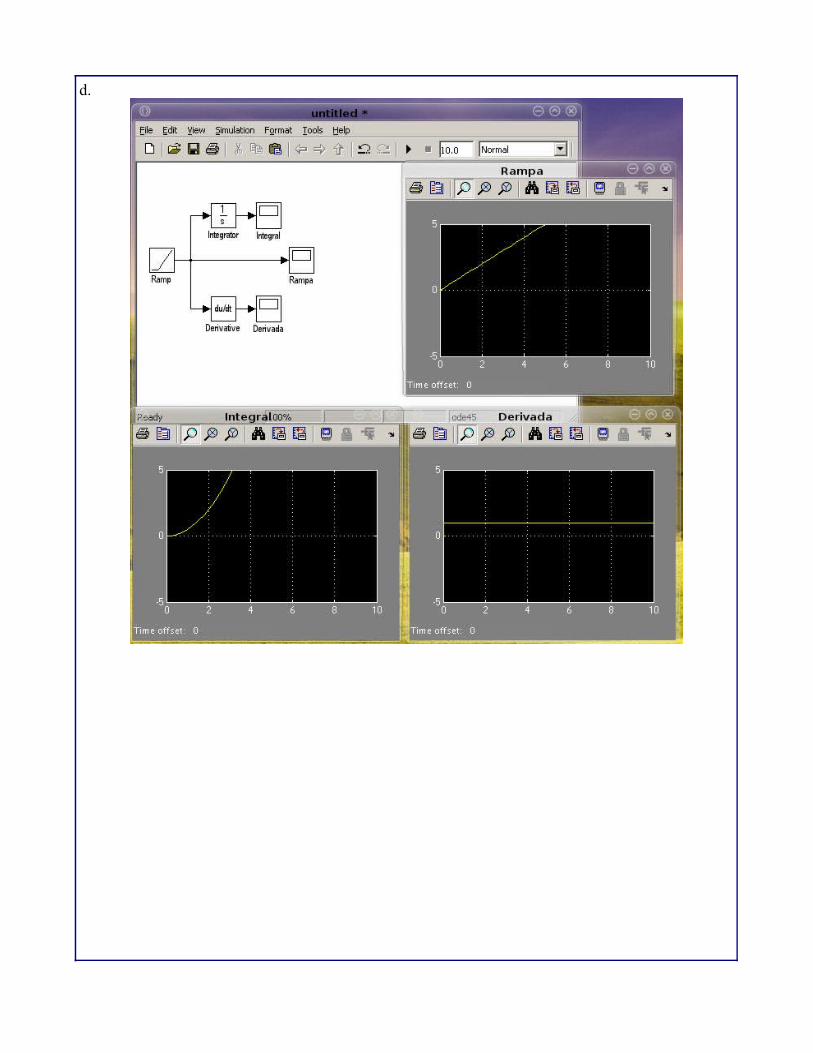
d.
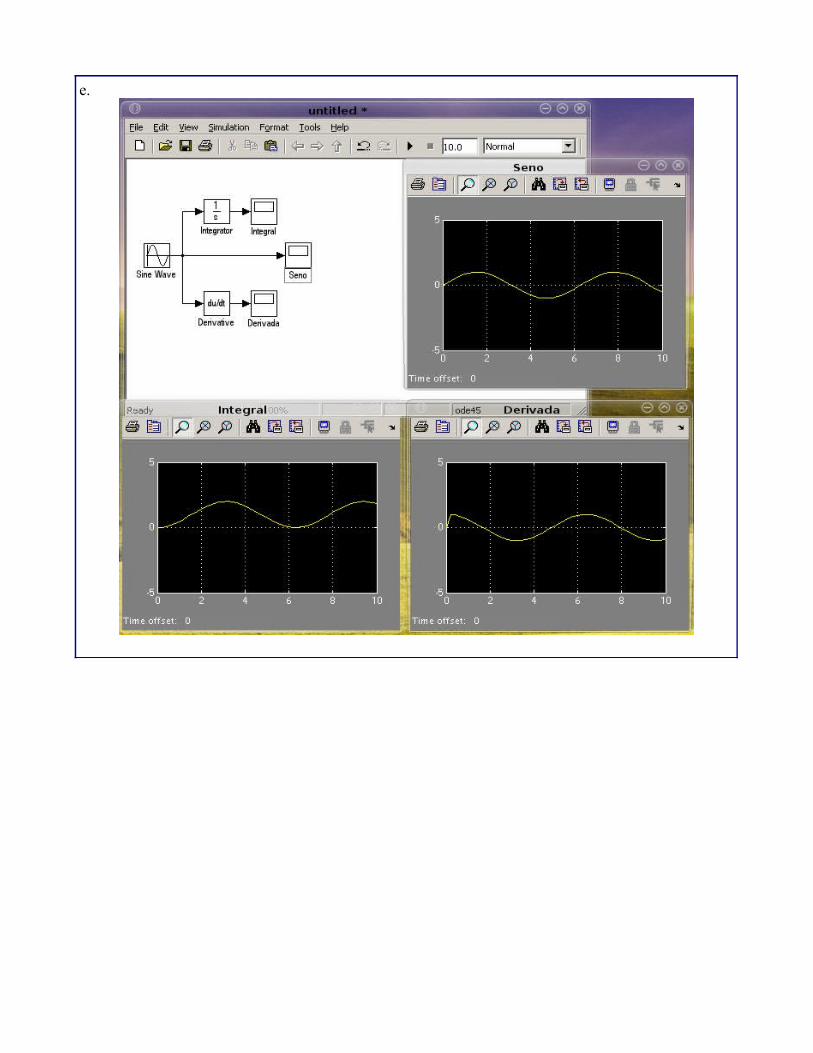
e.
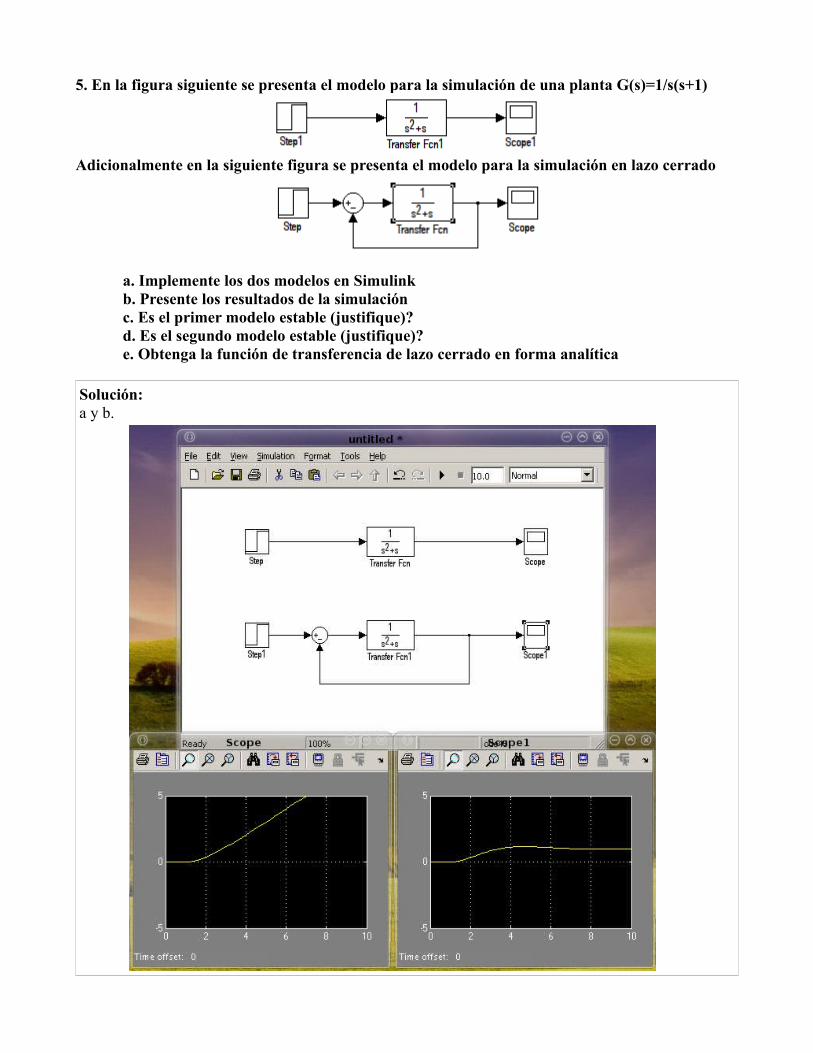
5. En la figura siguiente se presenta el modelo para la simulación de una planta G(s)=1/s(s+1)
Adicionalmente en la siguiente figura se presenta el modelo para la simulación en lazo cerrado
a. Implemente los dos modelos en Simulinkb. Presente los resultados de la simulaciónc. Es el primer modelo estable (justifique)?d. Es el segundo modelo estable (justifique)? e. Obtenga la función de transferencia de lazo cerrado en forma analítica
Solución:a y b.
c. El primer modelo no es estable.En “Scope” se ve que la respuesta al escalón es una rampa que continuará creciendo al infinito, por lo tanto se tendrá una respuesta infinita a un estimulo finito.
d. El segundo modelo es estableEn “Scope” se ve que la respuesta al escalón luego del tiempo “7” mantiene su valor, osea que se estabiliza; esto es una respuesta finíta a una entrada finita lo que corresponde con la definición de sistema estable.
e.La función de transferencia de forma análitica de lazo cerrado para el sistema es: Go(s) = G(s) / (1 + G(s)) = 1/(s2 + s)/[1 + 1/(s2+s)] = 1/ (s2 + s +1)
Se ve claramente que la función de transferencia en lazo cerrado agrega un 1 en el denominador, convirtiendo el sistema inicial en un sistema estable de segundo orden. Originalmente el sistema es un sistema integrador ya que posee un cero en el origen (1/(s2 + s) = 1/[(s)(s + 1)]) lo que lo hace inestable.