capitolul 5 dinamica tracŢiunii autovehiculelor cu...
TRANSCRIPT
Capitolul 5 DINAMICA TRACŢIUNII AUTOVEHICULELOR CU ROŢI 5.1 ECUAŢIA GENERALĂ A MIŞCĂRII RECTILINII A AUTOVEHICULELOR ŞI CONDIŢIA DE ÎNAINTARE A ACESTORA
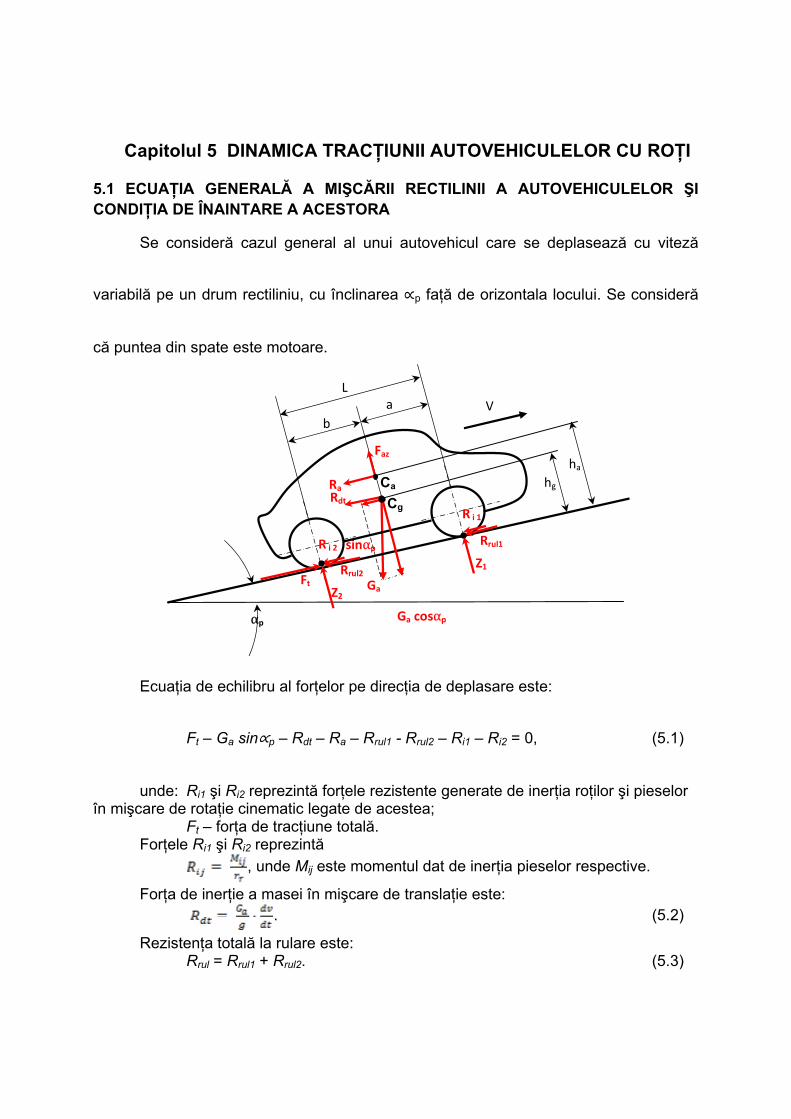
Se consideră cazul general al unui autovehicul care se deplasează cu viteză
variabilă pe un drum rectiliniu, cu înclinarea p faţă de orizontala locului. Se consideră
că puntea din spate este motoare. Ecuaţia de echilibru al forţelor pe direcţia de deplasare este:
Ft – Ga sin p – Rdt – Ra – Rrul1 - Rrul2 – Ri1 – Ri2 = 0, (5.1)
unde: Ri1 şi Ri2 reprezintă forţele rezistente generate de inerţia roţilor şi pieselor în mişcare de rotaţie cinematic legate de acestea;
Ft – forţa de tracţiune totală. Forţele Ri1 şi Ri2 reprezintă , unde Mij este momentul dat de inerţia pieselor respective.
Forţa de inerţie a masei în mişcare de translaţie este: . (5.2)
Rezistenţa totală la rulare este: Rrul = Rrul1 + Rrul2. (5.3)
Rdt
a V
Cg
Ga sinαp
Ga cosαp
Z1
Z2Ga
αp
L
b
CaRa
Faz
Ft
Rrul1
Rrul2
ha hg
R i 2
R i 1
Rezistenţa totală datorată pieselor în mişcare de rotaţie este: Ri1 + Ri2 = Rdr. (5.4) Rezistenţa la urcarea pantei este:
Rp = Ga sin p. (5.5)
Ecuaţia (5.1) devine: Ft = Rrul + Rp + Ra + (Rdt + Rdr). (5.6) Sau Ft = Rrul + Rp + Ra + Rd - bilanţul de tracţiune al autovehiculului. (5.7) Ţinând seama de forma de calcul al rezistenţei la accelerare, relaţia (5.7) poate fi
scrisă şi sub forma: (5.8)
Sau (5.9)
Realţiile (5.8) şi (5.9) reprezintă ecuaţia generală a mişcării rectilinii a autovehi-culelor cu roţi.
În regim de tracţiune, când autovehiculul se deplasează accelerat sau cu viteză constantă, condiţia de înaintare este
, (5.10)
care, ţinând seama de (5.8), duce la inegalitatea
Ft (5.11)
Însă forţa tangenţială la roţile motoare nu poate depăşi limita de aderenţă, astfel încât, pentru tracţiunea la puntea spate
X2 x·Z2 Φx. (5.12)
Dar , (5.13) iar . (5.14) Deci: , sau (5.15)
În practică, f x, iar Xi2 x·Z2 Φx. (5.16)
Astfel, condiţia de înaintare a autovehiculului este: . (5.17)
5.2 EXPRIMAREA ANALITICĂ A CARACTERISTICII DE TURAŢIE A MOTOARELOR CU ARDERE INTERNĂ PENTRU AUTOVEHICULE
Caracteristica unui motor cu ardere internă este o reprezentare grafică a variaţiei unor mărimi sau indici de performanţă ai motorului (ca de exemplu puterea, momentul motor, consumul specific de combustibil etc.) în funcţie de un parametru de regim (turaţia, sarcina etc.) sau un parametru de reglaj (avansul la declanşarea scânteii, avansul la injecţie) considerat ca variabilă independentă.
Pentru studiul dinamicii tracţiunii autovehiculelor o importanţă deosebită o are caracteristica de turaţie care prezintă dependenţa puterii efective, momentului motor efectiv, consumului orar de combustibil şi a consumului specific efectiv de combustibil în funcţie de turaţie atunci când motorul funcţionează la diferite sarcini. Performan’ele dinamice maxime se obţin atunci când motorul funcţionează la sarcină totală.
La motoarele cu aprindere prin scânteie (MAS) sarcina se reglează prin poziţia clapetei de acceleraţie, iar la motoarele cu aprindere prin comprimare (MAC), prin reglarea dozei de combustibil injectate în cilindru.
Ca regimuri de funcţionare de referinţă la motoarele cu ardere internă se definesc:
• Mersul încet în gol • Regimul minim de turaţie la funcţionare stabilă • Regimul de moment efectiv maxim • Regimul economic (consum specific efectiv minim) • Regimul de putere efectivă maximă • Regimul de turaţie maximă la sarcină totală • Regimul de mers în gol forţat
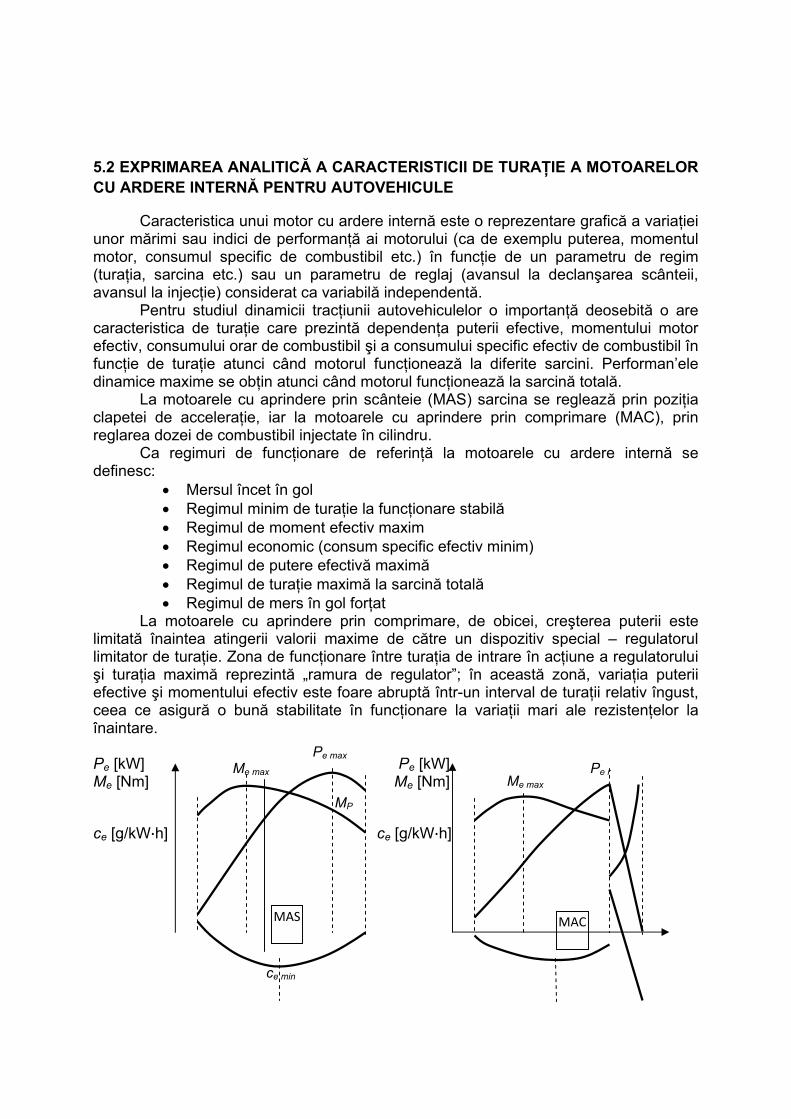
La motoarele cu aprindere prin comprimare, de obicei, creşterea puterii este limitată înaintea atingerii valorii maxime de către un dispozitiv special – regulatorul limitator de turaţie. Zona de funcţionare între turaţia de intrare în acţiune a regulatorului şi turaţia maximă reprezintă „ramura de regulator”; în această zonă, variaţia puterii efective şi momentului efectiv este foare abruptă într-un interval de turaţii relativ îngust, ceea ce asigură o bună stabilitate în funcţionare la variaţii mari ale rezistenţelor la înaintare.
Pe [kW] Pe [kW] Me [Nm] Me [Nm]
ce [g/kW·h] ce [g/kW·h]
Me max
Pe max
MP
ce min
Me maxPe r
MAS MAC
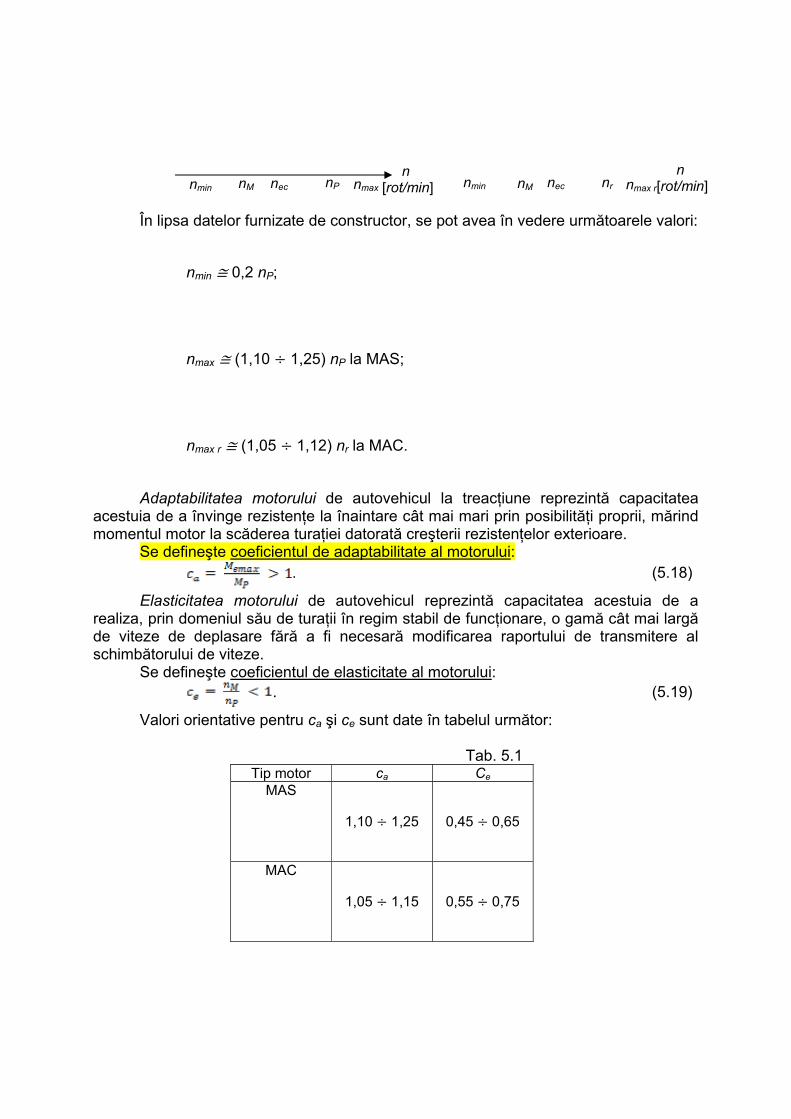
În lipsa datelor furnizate de constructor, se pot avea în vedere următoarele valori:
nmin 0,2 nP;
nmax (1,10 1,25) nP la MAS;
nmax r (1,05 1,12) nr la MAC.
Adaptabilitatea motorului de autovehicul la treacţiune reprezintă capacitatea acestuia de a învinge rezistenţe la înaintare cât mai mari prin posibilităţi proprii, mărind momentul motor la scăderea turaţiei datorată creşterii rezistenţelor exterioare.
Se defineşte coeficientul de adaptabilitate al motorului: . (5.18)
Elasticitatea motorului de autovehicul reprezintă capacitatea acestuia de a realiza, prin domeniul său de turaţii în regim stabil de funcţionare, o gamă cât mai largă de viteze de deplasare fără a fi necesară modificarea raportului de transmitere al schimbătorului de viteze.
Se defineşte coeficientul de elasticitate al motorului: . (5.19)
Valori orientative pentru ca şi ce sunt date în tabelul următor: Tab. 5.1
Tip motor ca Ce MAS
1,10 1,25 0,45 0,65
MAC
1,05 1,15 0,55 0,75
nmin nM nec nP nmax n [rot/min]
n [rot/min]nmin nM nec nmax rnr
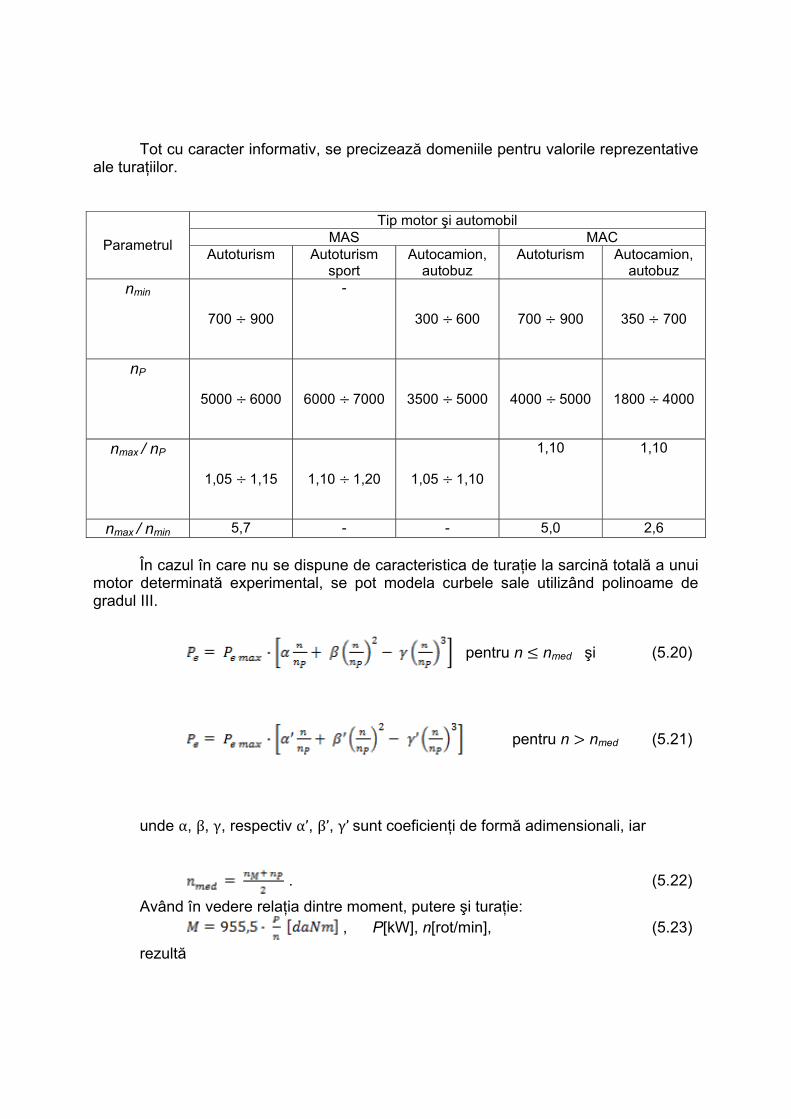
Tot cu caracter informativ, se precizează domeniile pentru valorile reprezentative ale turaţiilor.
Tip motor şi automobil MAS MAC Parametrul Autoturism Autoturism sport
Autocamion, autobuz
Autoturism Autocamion, autobuz
nmin
700 900
-
300 600 700 900 350 700
nP
5000 6000 6000 7000 3500 5000 4000 5000 1800 4000
nmax / nP
1,05 1,15 1,10 1,20 1,05 1,10
1,10 1,10
nmax / nmin 5,7 - - 5,0 2,6
În cazul în care nu se dispune de caracteristica de turaţie la sarcină totală a unui motor determinată experimental, se pot modela curbele sale utilizând polinoame de gradul III.
pentru n nmed şi (5.20)
pentru n nmed (5.21)
unde α, β, γ, respectiv α’, β’, γ’ sunt coeficienţi de formă adimensionali, iar
. (5.22)
Având în vedere relaţia dintre moment, putere şi turaţie: , P[kW], n[rot/min], (5.23)
rezultă
pentru n nmed şi (5.24)
pentru n nmed (5.25)
Pentru zona turaţiilor joase se pun condiţiile: P(nP) = Pe max, M(nM) = Me max şi (5.26)
Folosind coeficienţii de adaptabilitate şi de elasticitate, definiţi de relaţiile (5.18) şi (5.19), rezultă sistemul:
(5.27)
Cu soluţia: , , (5.28)
Pentru domeniul turaţiilor mari, se pun condiţiile: P(nP) = Pe max, M(nM) = Me max şi (5.29)
Din care rezultă sistemul:
(5.30)
cu soluţia , , (5.31)
În domeniul de funcţionare a regulatorului limitator de turaţie, se consideră că atât puterea efectivă cât şi momentul efectiv scad liniar de la valorile corespunzătoare momentului de intrare în funcţiune a regulatorului până la 0, la turaţia maximă de mers în gol.
Curba consumului specific de combustibil se poate modela cu ajutorul relaţiei: , (5.32)
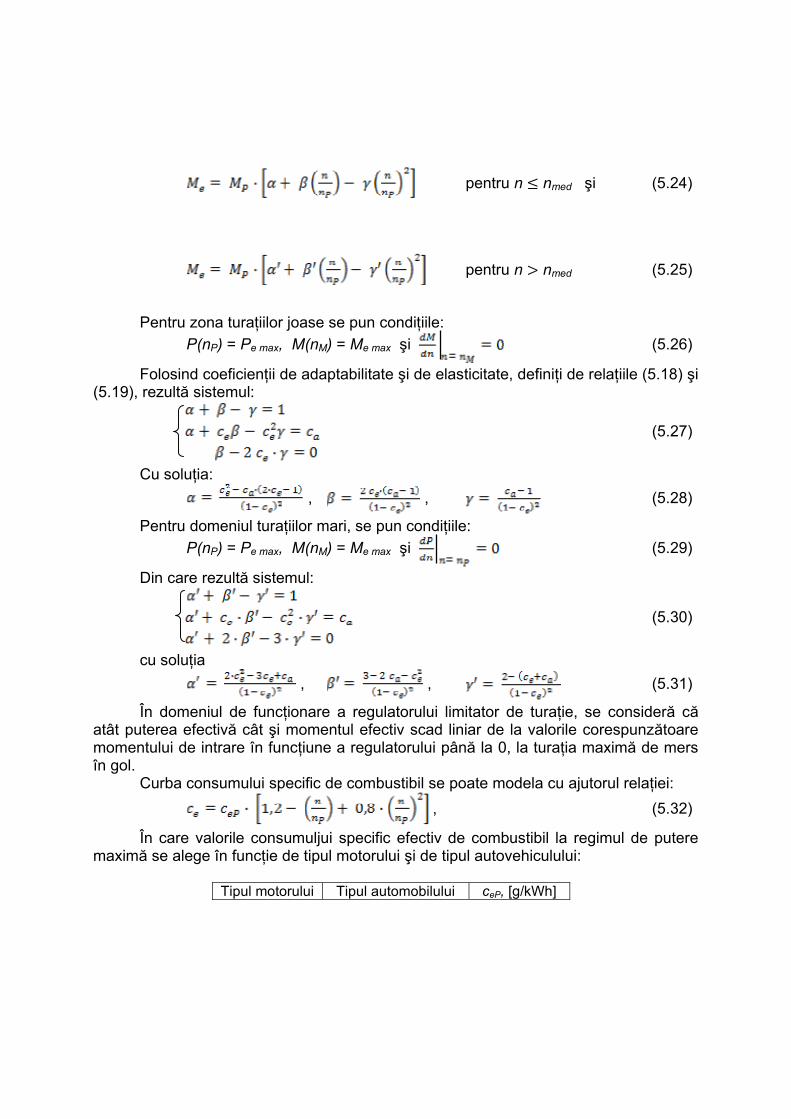
În care valorile consumuljui specific efectiv de combustibil la regimul de putere maximă se alege în funcţie de tipul motorului şi de tipul autovehiculului:
Tipul motorului Tipul automobilului ceP, [g/kWh]
Autoturisme
280 350
Autoturisme sport
310 340 MAS
Autocamioane, autobuze
300 470
Autoturisme
220 340 MAC
Autocamioane, autobuze
-
5.3 CARACTERISTICA DE TRACŢIUNE
5.3.1 Definirea caracteristicii de tracţiune
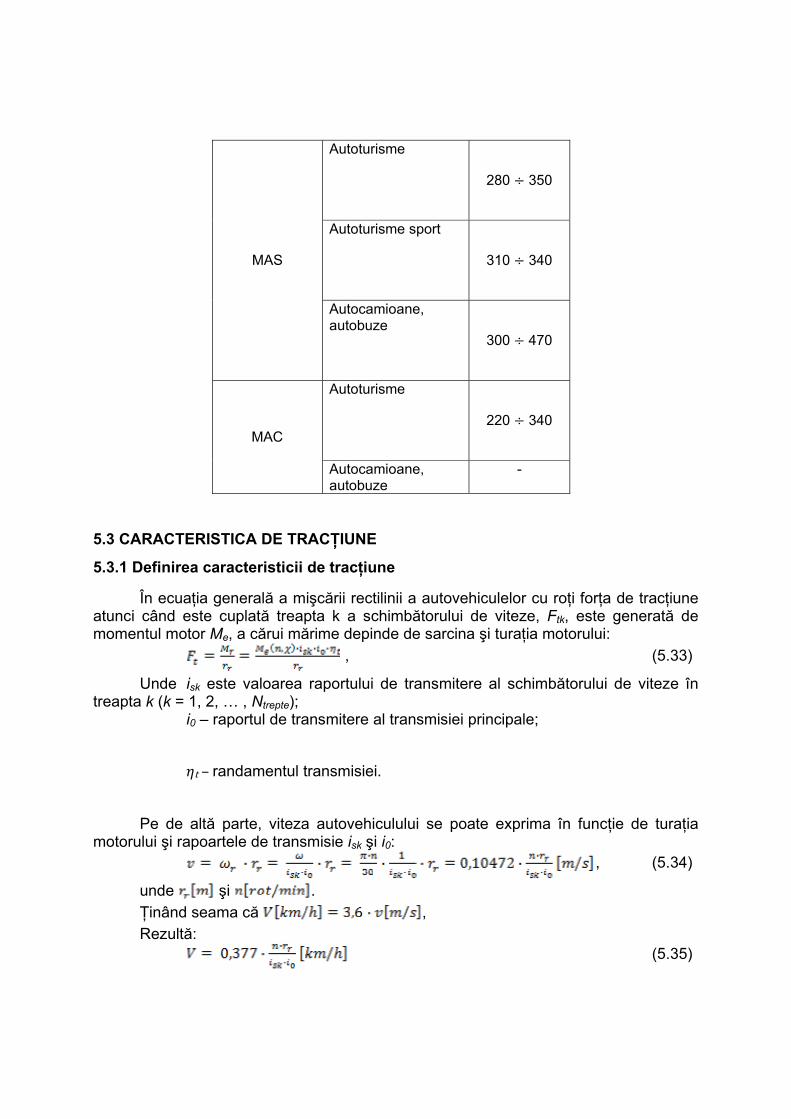
În ecuaţia generală a mişcării rectilinii a autovehiculelor cu roţi forţa de tracţiune atunci când este cuplată treapta k a schimbătorului de viteze, Ftk, este generată de momentul motor Me, a cărui mărime depinde de sarcina şi turaţia motorului:
, (5.33)
Unde isk este valoarea raportului de transmitere al schimbătorului de viteze în treapta k (k = 1, 2, … , Ntrepte);
i0 – raportul de transmitere al transmisiei principale;
t – randamentul transmisiei.
Pe de altă parte, viteza autovehiculului se poate exprima în funcţie de turaţia motorului şi rapoartele de transmisie isk şi i0:
, (5.34)
unde şi . Ţinând seama că , Rezultă: (5.35)
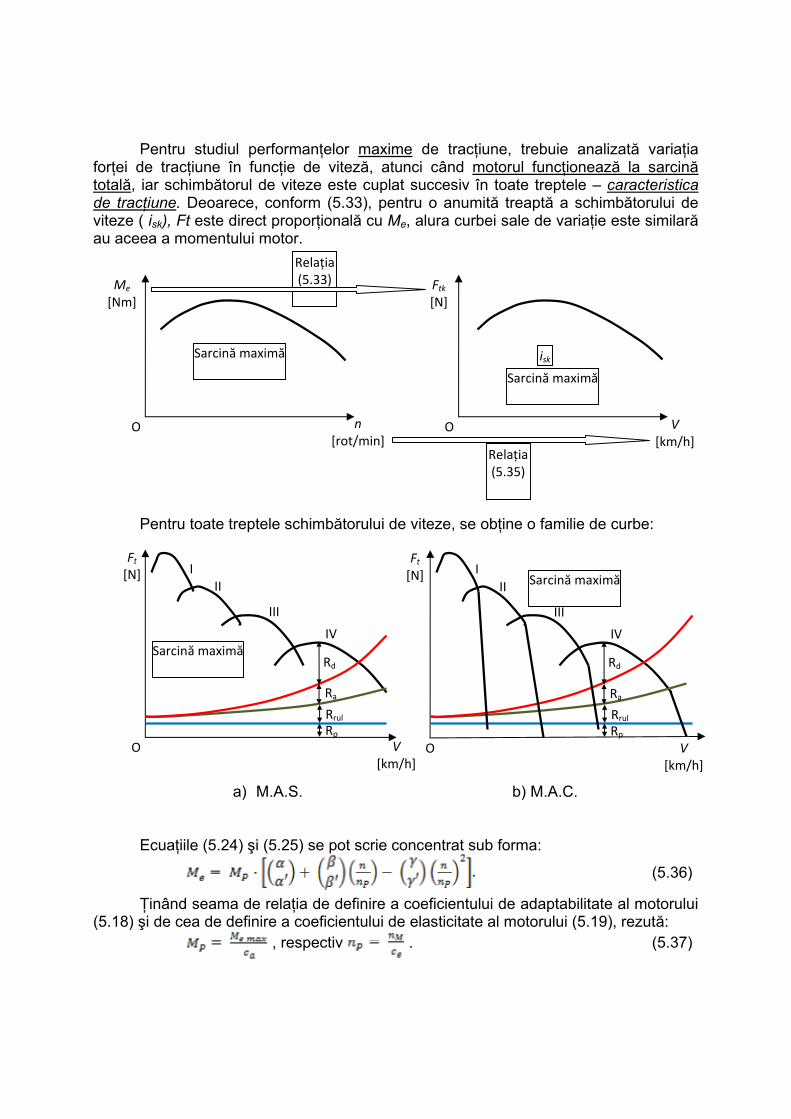
Pentru studiul performanţelor maxime de tracţiune, trebuie analizată variaţia forţei de tracţiune în funcţie de viteză, atunci când motorul funcţionează la sarcină totală, iar schimbătorul de viteze este cuplat succesiv în toate treptele – caracteristica de tracţiune. Deoarece, conform (5.33), pentru o anumită treaptă a schimbătorului de viteze ( isk), Ft este direct proporţională cu Me, alura curbei sale de variaţie este similară au aceea a momentului motor.
Pentru toate treptele schimbătorului de viteze, se obţine o familie de curbe:
a) M.A.S. b) M.A.C. Ecuaţiile (5.24) şi (5.25) se pot scrie concentrat sub forma:
(5.36)
Ţinând seama de relaţia de definire a coeficientului de adaptabilitate al motorului (5.18) şi de cea de definire a coeficientului de elasticitate al motorului (5.19), rezută:
, respectiv . (5.37)
isk
Ftk[N]
V [km/h]
O
Me [Nm]
n [rot/min]
O
Relația(5.33)
Relația(5.35)
Sarcină maximă
Sarcină maximă
O
Ft [N]
V [km/h]
I II
III
IV
Ra
Rrul
Rp
Rd
Ft[N]
V [km/h]
O
III
III
IV
Ra
Rrul
Rp
Rd
Sarcină maximă
Sarcină maximă

Operând înlocuirile corespunzătoare, rezultă:
sau
sau
(5.38)
Unde: . (5.39)
Turaţia motorului se poate exprima în funcţie de viteza autovehiculului din relaţia (5.35):
. (5.40)
Valoarea maximă a forţei de tracţiune care se poate dezvolta într-o anumită treaptă a schimbătorului de viteze se obţine introducând în realaţia (5.33) valoarea maximă a momentului efectiv:
. (5.41)
Exprimând pe Me în funcţie de Ftk din (5.33) şi pe Me max în funcţie de Ftk max din (5.41) şi înlocuind turaţia cu expresia (5.40), relaţia (5.38) devine:
(5.42) În care coeficienţii de formă sunt folosiţi după cum urmează:
1, β1, γ1 pentru V Vmed k (5.43)
’1, β’1, γ’1 pentru V Vmed k (5.44)
Unde (5.45)
Ftk, R [N]
V [km/h] O
Ra
Rrul
Rp
Rd
V0 Vk maxVxa
b
c
e
Rp
Rp + Rrul = Rψ
Rp + Rrul + Ra = ΣR
d
Ftk la sarcină maximă
Ftk la sarcină parțială
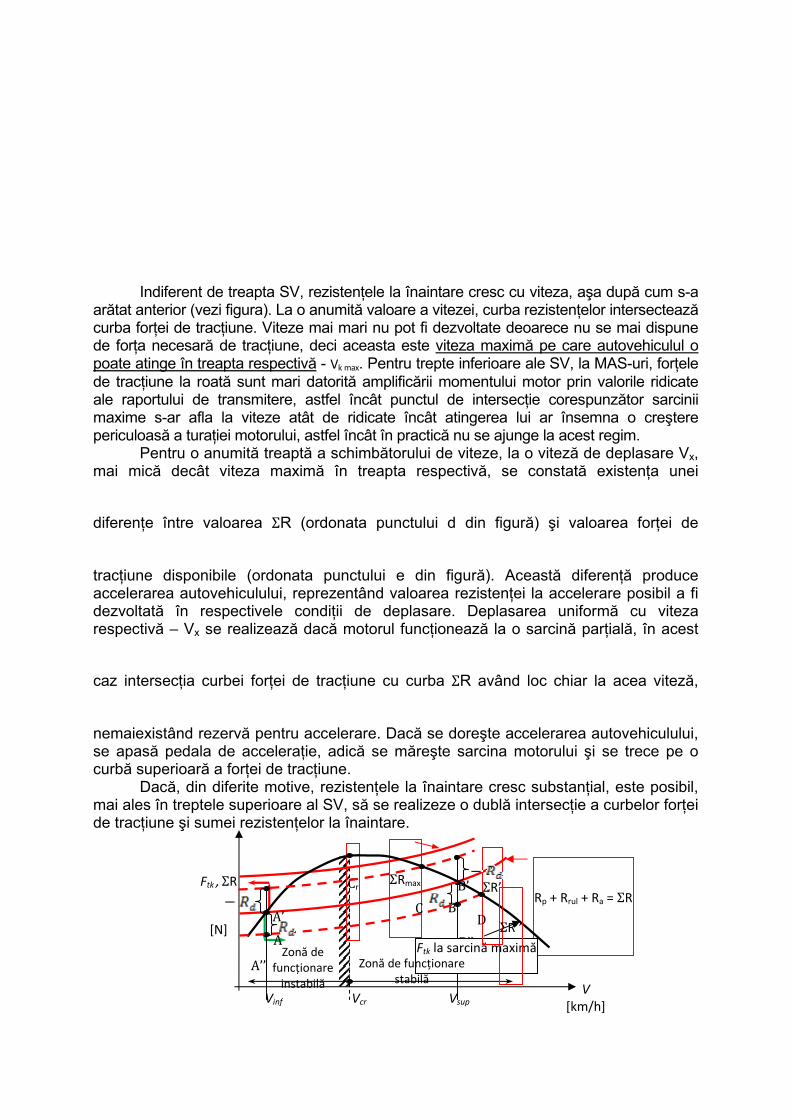
Indiferent de treapta SV, rezistenţele la înaintare cresc cu viteza, aşa după cum s-a
arătat anterior (vezi figura). La o anumită valoare a vitezei, curba rezistenţelor intersectează curba forţei de tracţiune. Viteze mai mari nu pot fi dezvoltate deoarece nu se mai dispune de forţa necesară de tracţiune, deci aceasta este viteza maximă pe care autovehiculul o poate atinge în treapta respectivă - Vk max. Pentru trepte inferioare ale SV, la MAS-uri, forţele de tracţiune la roată sunt mari datorită amplificării momentului motor prin valorile ridicate ale raportului de transmitere, astfel încât punctul de intersecţie corespunzător sarcinii maxime s-ar afla la viteze atât de ridicate încât atingerea lui ar însemna o creştere periculoasă a turaţiei motorului, astfel încât în practică nu se ajunge la acest regim.
Pentru o anumită treaptă a schimbătorului de viteze, la o viteză de deplasare Vx, mai mică decât viteza maximă în treapta respectivă, se constată existenţa unei
diferenţe între valoarea ΣR (ordonata punctului d din figură) şi valoarea forţei de
tracţiune disponibile (ordonata punctului e din figură). Această diferenţă produce accelerarea autovehiculului, reprezentând valoarea rezistenţei la accelerare posibil a fi dezvoltată în respectivele condiţii de deplasare. Deplasarea uniformă cu viteza respectivă – Vx se realizează dacă motorul funcţionează la o sarcină parţială, în acest
caz intersecţia curbei forţei de tracţiune cu curba ΣR având loc chiar la acea viteză,
nemaiexistând rezervă pentru accelerare. Dacă se doreşte accelerarea autovehiculului, se apasă pedala de acceleraţie, adică se măreşte sarcina motorului şi se trece pe o curbă superioară a forţei de tracţiune.
Dacă, din diferite motive, rezistenţele la înaintare cresc substanţial, este posibil, mai ales în treptele superioare al SV, să se realizeze o dublă intersecţie a curbelor forţei de tracţiune şi sumei rezistenţelor la înaintare.
B
B’’
B’
Ftk , ΣR
[N]
Rp + Rrul + Ra = ΣR ΣRmaxCr
A
A’
A’’ V
[km/h]
Ftk la sarcină maximă
Vinf VsupVcr
Zonă de funcționarestabilă
Zonă de funcționareinstabilă
ΣR’
ΣR’’
C D

Punctul A Dacă rezistenţa la înaintare creşte accidental, până în A’, ea va depăşi forţa de
tracţiune, ceea ce va produce o încetinire a deplasării autovehiculului cu . La
scăderea vitezei, forţa de tracţiune va scădea şi ea, astfel încât autovehiculul îţi va reduce în continuare vireza până la calarea motorului (dacă nu se decuplează ambreiajul şi nu se trece într-o treaptă mai mică a SV).
Dacă rezistenţa la înaintare scade accidental, până în A’’, forţa motoare va deveni mai mare, producând o accelerare a autovehiculului cu . Odată cu
creşterea vitezei, va avea loc şi creşterea rapidă a forţei de tracţiune, ceea ce va mări şi mai mult viteza autovehiculului.
În ambele cazuri, în jurul punctului A funcţionarea grupului motopropulsor este instabilă, el nefiind capabil să se adapteze micilor schimbări ale bilanţului de tracţiune.
Punctul B Dacă rezistenţa la înaintare creşte accidental, până în B’, ea va depăşi forţa de
tracţiune, ceea ce va produce o încetinire a deplasării autovehiculului cu . La
scăderea vitezei, forţa de tracţiune va creşte ceea ce va readuce echilibrul cu forţele rezistente într-un nou punct, C.
Dacă rezistenţa la înaintare scade accidental, până în A’’, forţa motoare va deveni mai mare, producând o accelerare a autovehiculului cu . Odată cu
creşterea vitezei, va avea loc scăderea forţei de tracţiune până la egalarea forşei de rezistenţă în punctul D.
În jurul punctului B funcţionarea grupului motopropulsor este stabilă, el fiind capabil să se adapteze micilor schimbări ale bilanţului de tracţiune.
La creşterea rezistenţei la înaintare, punctele A şi B se apropie, la un moment dat ele confundându-se în Cr. În acest punct, curbele forţei de tracţiune şi de rezistenţă la înaintare sunt tangente. La viteze mai mari decât a acestui punct, funcţionarea grupului motopropulsor este stabilă, în timp ce la viteze mai mici ea devine instabilă. Viteza critică reprezintă viteza minimă de funcţionare în regim staţionar şi corespunde punctului Cr. Viteza critică este mai mică decât viteza pentru care forţa de tracţiune atinge valoarea maximă. Diferenţa dintre cele două viteze creşte în treptele superioare ale SV.
I
II
III
IV
V
Ft ,
ΣR
ΣRI
FtI ΣRII
FtIIIΣRIII
ΣRIV
FtIV
FtV
ΣRV
FtII
5.4 CARACTERISTICA DINAMICĂ
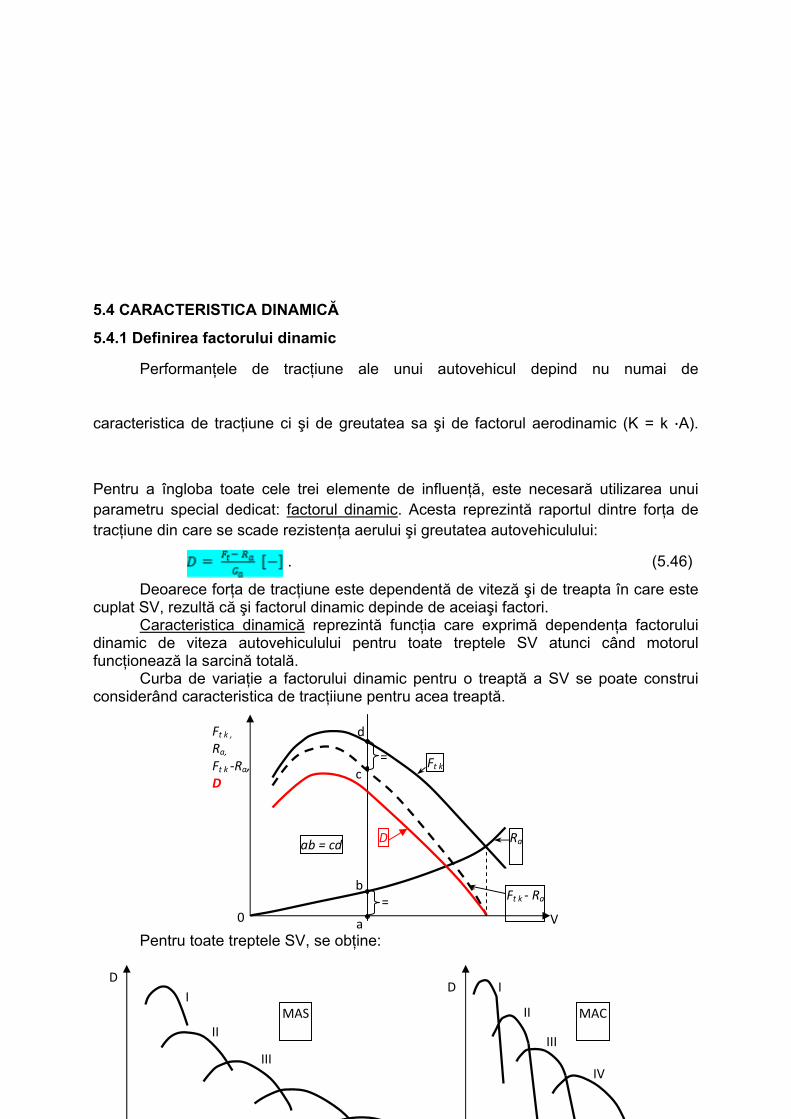
5.4.1 Definirea factorului dinamic
Performanţele de tracţiune ale unui autovehicul depind nu numai de
caracteristica de tracţiune ci şi de greutatea sa şi de factorul aerodinamic (K = k ·A).
Pentru a îngloba toate cele trei elemente de influenţă, este necesară utilizarea unui parametru special dedicat: factorul dinamic. Acesta reprezintă raportul dintre forţa de tracţiune din care se scade rezistenţa aerului şi greutatea autovehiculului:
. (5.46)
Deoarece forţa de tracţiune este dependentă de viteză şi de treapta în care este cuplat SV, rezultă că şi factorul dinamic depinde de aceiaşi factori.
Caracteristica dinamică reprezintă funcţia care exprimă dependenţa factorului dinamic de viteza autovehiculului pentru toate treptele SV atunci când motorul funcţionează la sarcină totală.
Curba de variaţie a factorului dinamic pentru o treaptă a SV se poate construi considerând caracteristica de tracţiiune pentru acea treaptă.
Pentru toate treptele SV, se obţine:
=
=
Ft k , Ra,
Ft k ‐Ra, D
a
b
c
d
Ft k
Ra
Ft k ‐ Ra
V
ab = cd D
0
I
II
III
MAS
D I
II
III
IV
MAC
D
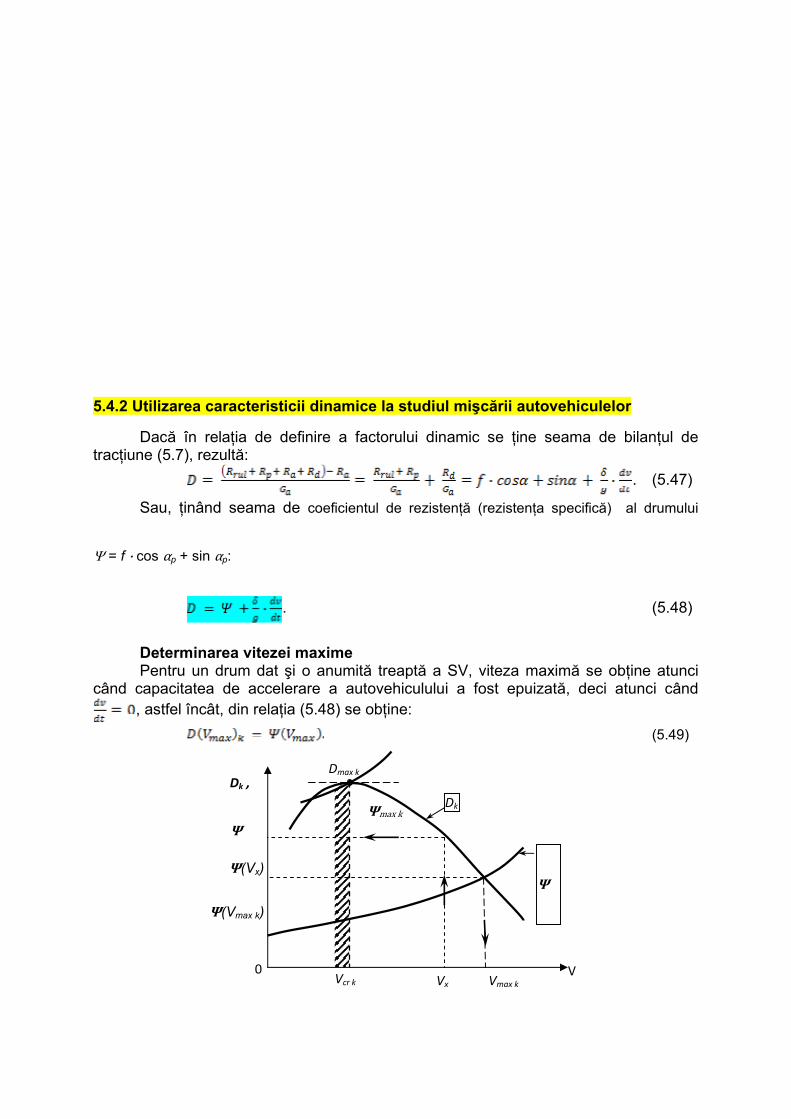
5.4.2 Utilizarea caracteristicii dinamice la studiul mişcării autovehiculelor
Dacă în relaţia de definire a factorului dinamic se ţine seama de bilanţul de tracţiune (5.7), rezultă:
. (5.47)
Sau, ţinând seama de coeficientul de rezistenţă (rezistenţa specifică) al drumului
Ψ = f · cos αp + sin αp:
. (5.48)
Determinarea vitezei maxime Pentru un drum dat şi o anumită treaptă a SV, viteza maximă se obţine atunci
când capacitatea de accelerare a autovehiculului a fost epuizată, deci atunci când , astfel încât, din relaţia (5.48) se obţine: (5.49)
Dk ,
V
Dk
0 Vmax kVx
(Vx)
Dmax k
max k
Vcr k
(Vmax k)
Pentru o anumită viteză, Vx, din graficul caracteristicii dinamice se poate
determina valoarea coeficientului de rezistenţă al drumului care poate fi învins în trepta respectivă a SV.
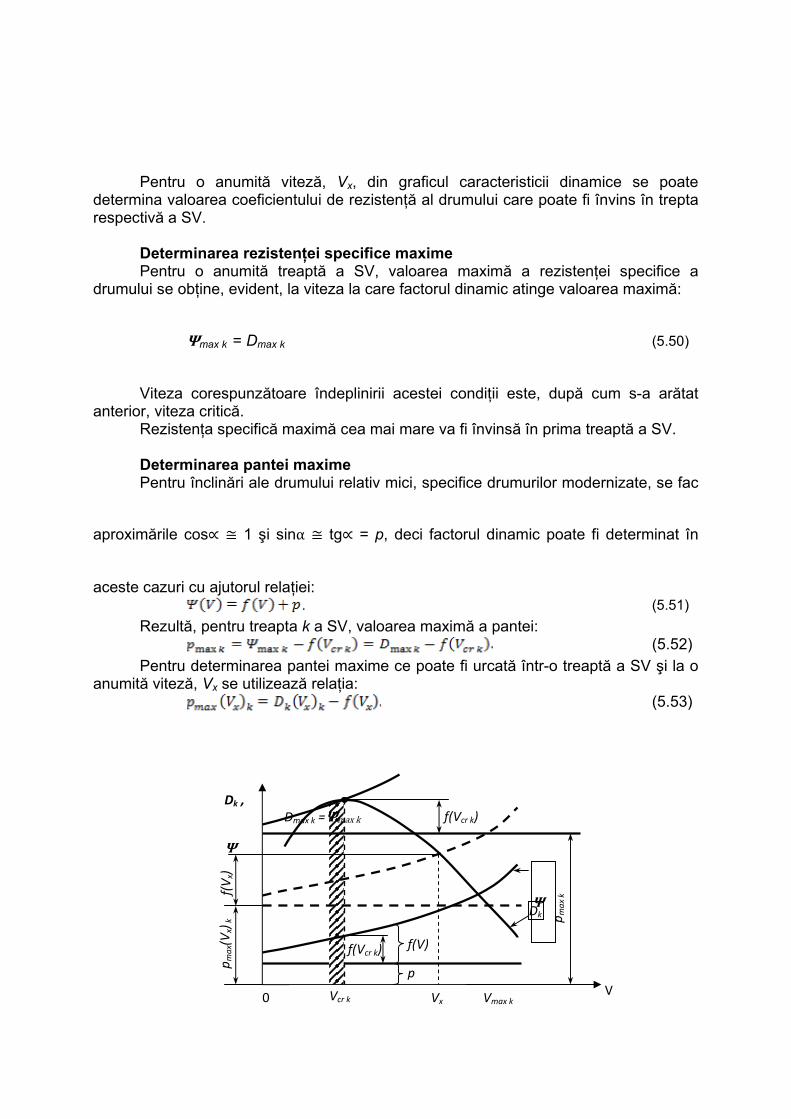
Determinarea rezistenţei specifice maxime Pentru o anumită treaptă a SV, valoarea maximă a rezistenţei specifice a
drumului se obţine, evident, la viteza la care factorul dinamic atinge valoarea maximă:
max k = Dmax k (5.50)
Viteza corespunzătoare îndeplinirii acestei condiţii este, după cum s-a arătat anterior, viteza critică.
Rezistenţa specifică maximă cea mai mare va fi învinsă în prima treaptă a SV. Determinarea pantei maxime Pentru înclinări ale drumului relativ mici, specifice drumurilor modernizate, se fac
aproximările cos 1 şi sinα tg = p, deci factorul dinamic poate fi determinat în
aceste cazuri cu ajutorul relaţiei: . (5.51) Rezultă, pentru treapta k a SV, valoarea maximă a pantei: (5.52) Pentru determinarea pantei maxime ce poate fi urcată într-o treaptă a SV şi la o
anumită viteză, Vx se utilizează relaţia: (5.53)
Dk ,
V
Dk
0 Vmax kVx
Dmax k = max k
Vcr k
f(V)
p
f(Vcr k)
p max k
p max(V
x) k
f(V x)
f(Vcr k)

Determinarea domeniului de aderenţă La roţile punţii motoare j reacţiunea tangenţială longitudinală trebuie să
îndeplinească condiţia de aderenţă:
Xj Φxj = x· Zj, j = 1, 2 (5.54)
unde Xj = Ftj – Rrul j – Xij . (5.55)
Deci Ftj – Rrul j – Xij x· Zj,
sau Ftj ( x + f)· Zj + Xij. (5.56)
Din relaţia de definire a factorului dinamic rezultă:
Ftj = D· Ga + Ra. (5.57)
Din ultimele două realţii rezultă condiţia de aderenţă pentru factorul dinamic: . (5.58)
Forţa datorată inerţiei roţilor şi pieselor cinematic legate de acestea, Xij, este proporţională cu acceleraţia autovehiculului. La limita de aderenţă viteza devine practic constantă, deci componenta respectivă se poate neglija:
(5.59)
Condiţia de aderenţă se poate scrie sub forma:
D D . (5.60)
Ecuaţia (5.59) este ecuaţia unei parabole descrescătoare în raport cu viteza.
II
IIIIV
D,
D
I
D (φx1)
D (φx2)
φx1 φx2
În porţiunile din curbele factorului dinamic situate deasupra curbelor D (V) nu
este posibilă deplasarea autovehiculului cu valorile respective ale lui D deoarece se depăşeşte aderenţa roţilor motoare.
5.5 CARACTERISTICA PUTERILOR
5.5.1 Definirea caracteristicii puterilor
În studiul dinamicii autovehiculelor este necesar să se facă aprecieri referitoare la puteri, în special în cazul deplasării cu viteze mari, deci la turaţii ridicate ale motorului cu solicitări mari ale acestuia.
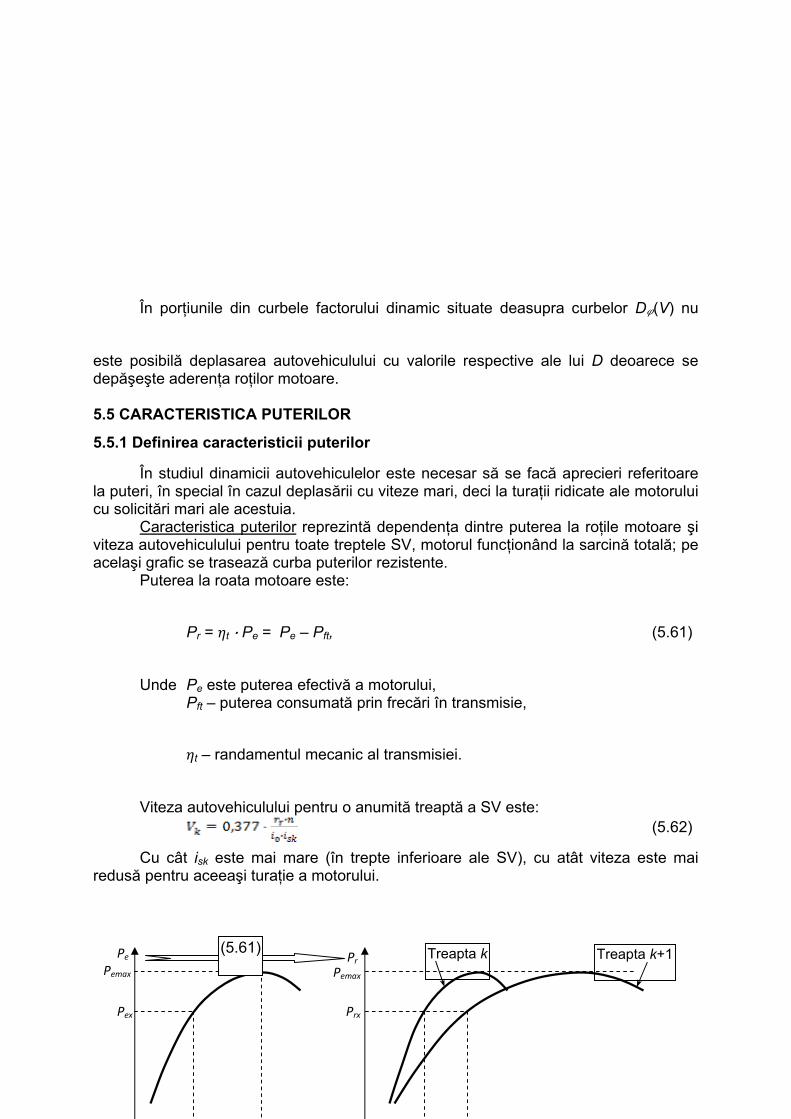
Caracteristica puterilor reprezintă dependenţa dintre puterea la roţile motoare şi viteza autovehiculului pentru toate treptele SV, motorul funcţionând la sarcină totală; pe acelaşi grafic se trasează curba puterilor rezistente.
Puterea la roata motoare este:
Pr = t · Pe = Pe – Pft, (5.61)
Unde Pe este puterea efectivă a motorului, Pft – puterea consumată prin frecări în transmisie,
t – randamentul mecanic al transmisiei.
Viteza autovehiculului pentru o anumită treaptă a SV este: (5.62)
Cu cât isk este mai mare (în trepte inferioare ale SV), cu atât viteza este mai redusă pentru aceeaşi turaţie a motorului.
Pe
Pemax
Pex
PrPemax
Prx
Treapta k Treapta k+1(5.61)

Având în vedere relaţiile (5.20) şi (5.21), puterea la roată devine:
. (5.63)
Din relaţia (5.62) se exprimă turaţia: . (5.64)
Înlocuind pe n şi pe nP astfel exprimate, rezultă: . (5.65)
Unde , β, γ se utilizează pentru , iar
’, β’, γ’ – pentru V Vmed k .
Ţinând seama de (5.62), se exprimă (VP)k în funcţie de nP şi se introduce în (5.65):
(5.66) Puterea la roată poate fi exprimată în funcţie de viteză printr-un polinom de gradul
III. Pentru o anumită viteză, ea este direct proporţională cu puterea efectivă maximă.
5.5.2 Utilizarea caracteristicii puterilor la studiul mişcării autovehiculelor
Ecuaţia bilanţului puterilor la roţile motoare ale autovehiculului este: Pr = Prul + Pp + Pa + Pd, (5.67)
unde Prul este puterea necesară învingerii rezistenţei la rulare, Pp – puterea necesară învingerii rezistenţei la urcarea pantei,
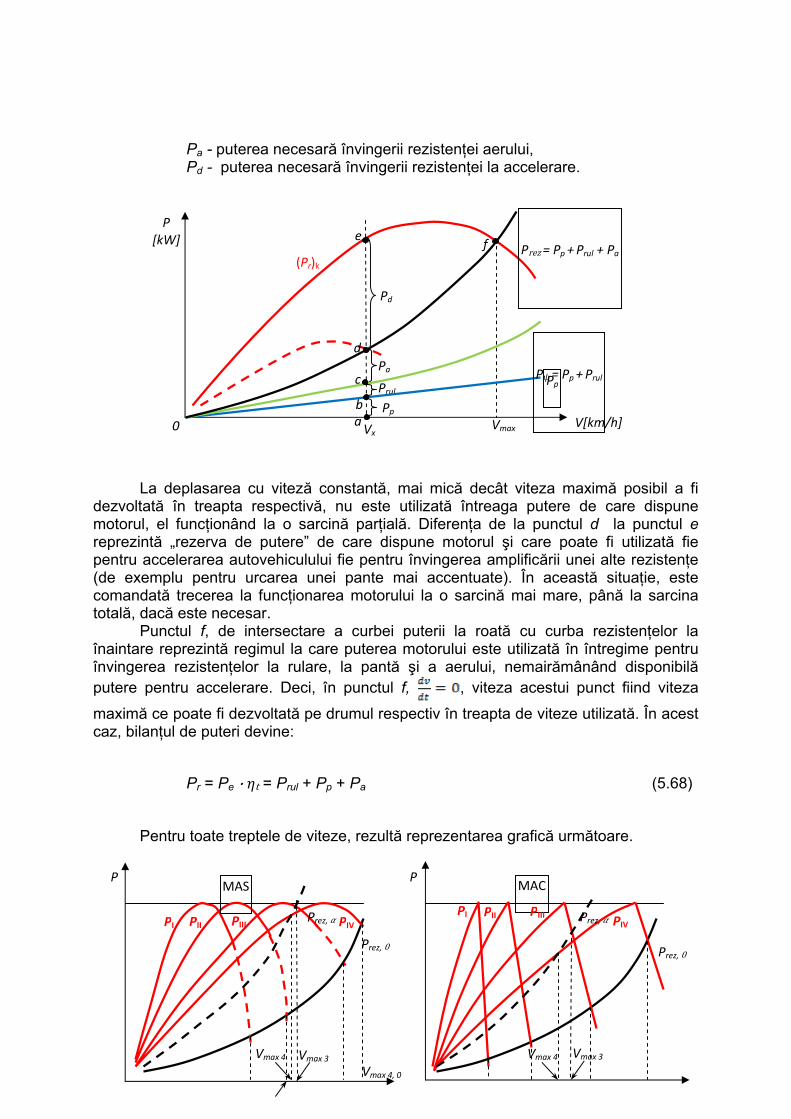
Pa - puterea necesară învingerii rezistenţei aerului, Pd - puterea necesară învingerii rezistenţei la accelerare. La deplasarea cu viteză constantă, mai mică decât viteza maximă posibil a fi
dezvoltată în treapta respectivă, nu este utilizată întreaga putere de care dispune motorul, el funcţionând la o sarcină parţială. Diferenţa de la punctul d la punctul e reprezintă „rezerva de putere” de care dispune motorul şi care poate fi utilizată fie pentru accelerarea autovehiculului fie pentru învingerea amplificării unei alte rezistenţe (de exemplu pentru urcarea unei pante mai accentuate). În această situaţie, este comandată trecerea la funcţionarea motorului la o sarcină mai mare, până la sarcina totală, dacă este necesar.
Punctul f, de intersectare a curbei puterii la roată cu curba rezistenţelor la înaintare reprezintă regimul la care puterea motorului este utilizată în întregime pentru învingerea rezistenţelor la rulare, la pantă şi a aerului, nemairămânând disponibilă putere pentru accelerare. Deci, în punctul f, , viteza acestui punct fiind viteza
maximă ce poate fi dezvoltată pe drumul respectiv în treapta de viteze utilizată. În acest caz, bilanţul de puteri devine:
Pr = Pe · t = Prul + Pp + Pa (5.68)
Pentru toate treptele de viteze, rezultă reprezentarea grafică următoare.
aPp
Prul
Pa
Pd
b
c
d
ef
P = Pp + Prul
Prez = Pp + Prul + Pa
Pp
(Pr)k
P [kW]
V[km/h] 0 VxVmax
MACP
PI PII PIII PIV Prez,
Prez, 0
Vmax 4 Vmax 3
MAS
PI PII PIII PIVPrez,
Prez, 0
P
Vmax 4, 0
Vmax 4 Vmax 3
Pentru o anumită valoare a pantei, Prez, , viteza maximă în treapta a 3-a este
mai mare decât cea corespunzătoare treptei a 4-a. Vitezele maxime pentru treptele inferioare se pot atinge la valori prea mari ale
turaţiei motorului, care pot duce la deteriorarea acestuia. Din acest motiv, în practică ele nu pot fi atinse.
Pentru trasarea curbei rezistenţelor la deplasare, se utilizează expresiile de calcul al puterilor rezistente prezentate în capitolul 3:
. Exprimând coeficientul rezistenţei la
rulare în raport cu viteza (vezi subcapitolul 3.1.3), f = f0 + f01 V + f02 V2, rezultă:
;
. În cazul deplasării cu viteză maximă, se
consideră Vx = V şi deci
. Deci:
(5.69) Pe de altă parte, pentru curba puterii la roată la sarcină totală se utilizează relaţia
(5.66) cu coeficienţii ’, β’, γ’ deoarece interesează zona turaţiilor ridicate:
. (5.70)
Intersecţia celor două curbe defineşte viteza maximă căutată. După simplificarea cu Vmax, rezultă o ecuaţie de gradul II în Vmax de forma:
(5.71)
0
În care: ;
(5.72)
.
În alt caz, se poate preciza viteza maximă pe care va trebui să o dezvolte autovehiculul şi se cere să se determine puterea efectivă maximă a motorului. Pentru rezolvarea acestei probleme se aleg iniţial, pe baza unui studiu statistic dezvoltat pe modele similare de autovehicule, valorile coeficienţilor de adaptabilitate şi de elasticitate şi raportul nmax / nP, considerând că viteza maximă va fi atinsă atunci când motorul va funcţiona la turaţia maximă admisă.
Particularizând relaţia (5.69) pentru viteza maximă impusă, se determină puterea rezistentă totală, care este egală cu puterea la roată pentru regimul respectiv de funcţionare.
Din relaţia (5.21), în care s-a pus condiţia ca (Pe)Vmax = (Prez)Vmax/ηt, rezultă:
. (5.73)
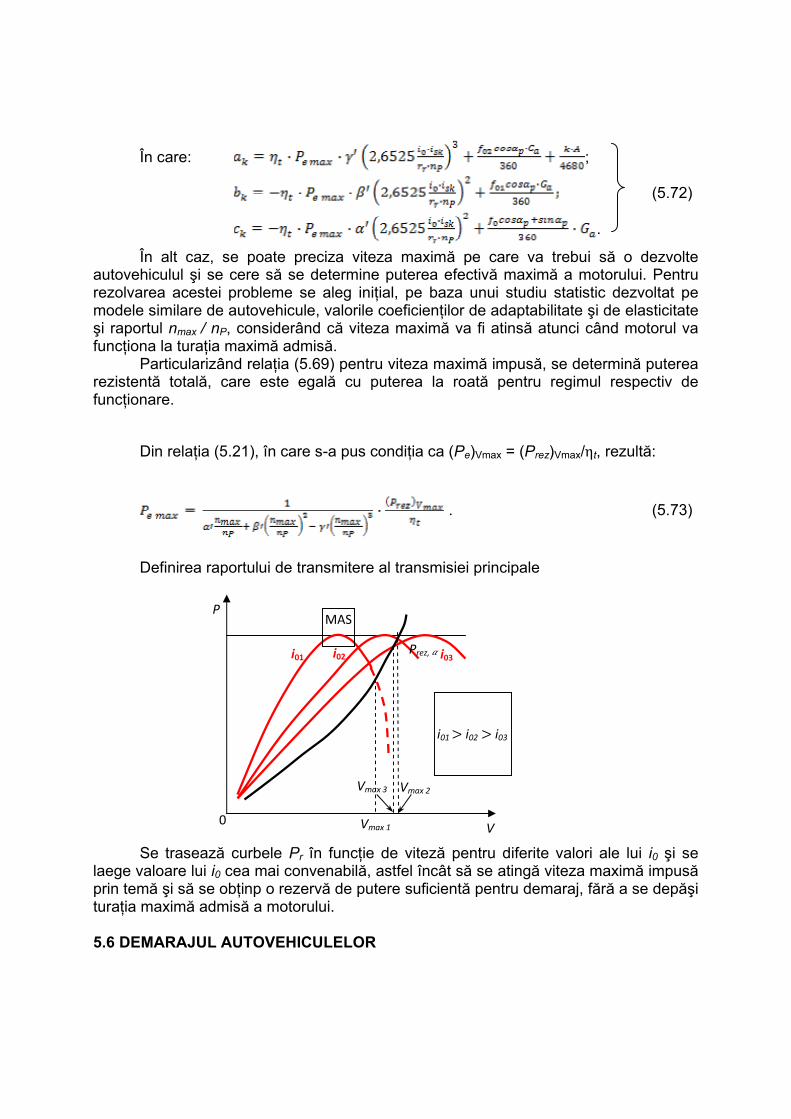
Definirea raportului de transmitere al transmisiei principale Se trasează curbele Pr în funcţie de viteză pentru diferite valori ale lui i0 şi se
laege valoare lui i0 cea mai convenabilă, astfel încât să se atingă viteza maximă impusă prin temă şi să se obţinp o rezervă de putere suficientă pentru demaraj, fără a se depăşi turaţia maximă admisă a motorului.
5.6 DEMARAJUL AUTOVEHICULELOR
MAS
i01 i02 i03Prez,
P
Vmax 1 V
Vmax 3 Vmax 2
0
i01 i02 i03
Caracteristicle de demarare ale unui autovehicul se pot aprecia prin caracteristica acceleraţiilor şi prin caracteristica de demarare.
5.6.1 Caracteristica acceleraţiilor
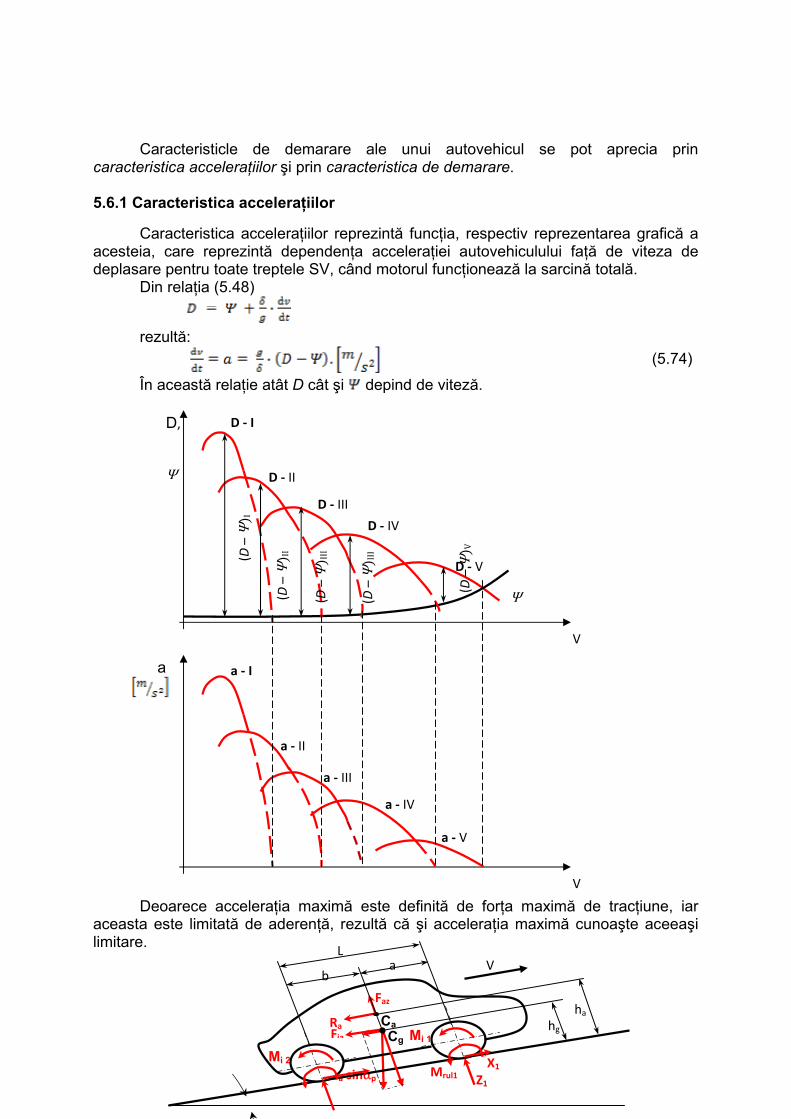
Caracteristica acceleraţiilor reprezintă funcţia, respectiv reprezentarea grafică a acesteia, care reprezintă dependenţa acceleraţiei autovehiculului faţă de viteza de deplasare pentru toate treptele SV, când motorul funcţionează la sarcină totală.
Din relaţia (5.48)
rezultă: (5.74)
În această relaţie atât D cât şi depind de viteză. Deoarece acceleraţia maximă este definită de forţa maximă de tracţiune, iar
aceasta este limitată de aderenţă, rezultă că şi acceleraţia maximă cunoaşte aceeaşi limitare.
D ‐ II
D ‐ III
D ‐ IV
D ‐ V
V
D,
Ψ
D ‐ I
Ψ
(D – Ψ
I
(D – Ψ
II
(D – Ψ
III
(D – Ψ
III
(D – Ψ
V
a ‐ II
a ‐ III
a ‐ IV
a ‐ V
V
a
a ‐ I
Fia Mi 1
Mi 2
V
Cg
Ga sinαp Z1
CaRa
Faz
X1Mrul1
La
b
hg ha

Euaţia de echilibru al forţelor care acţionează pe direcţia de deplasare a
autovehiculului este:
X1 + X2 – Ga sin p – Ra – Fia = 0. (5.75)
Ecuaţia (5.75) se mai poate scrie sub forma: . (5.76)
Rezultă: (5.77)
Cazul tracţiunii la roţile din spate Reacţiunile tangenţiale la roţi, limitate de aderenţă, sunt: ;
, (5.78)
unde Z1 şi Z2 sunt reacţiunile normale de la cele două punţi, limitate de
aderenţă, ale căror mărimi se calculează cu ajutorul relaţiilor (4.29) şi (4.30) pentru cazul tracţiunii la puntea spate.
, (4.29)
(4.30)
Înlocuind reacţiunile tangenţiale date de expresiile (5.78) în relaţia (5.77) rezultă:
(5.79)
În această expresie: şi , cei doi termeni putând fi neglijaţi.
Deoarece acceleraţia maximă este realizată în treptele inferioare ale SV, când autovehicului se deplasează cu viteză mică, se poate neglija şi rezistenţa aerului, astfel încât relaţia (5.79) devine:
(5.80)
Conform relaţiei (4.30):
, care este introdus în (5.80):
(5.81)
La deplasarea autovehiculului în palier, când p = 0, rezultă
. (5.82)
Cazul tracţiunii la roţile din faţă Reacţiunile tangenţiale la roţi, limitate de aderenţă, sunt: ,
, (5.83)
unde Z1 şi Z2 sunt reacţiunile normale de la cele două punţi, limitate de aderenţă, ale
căror mărimi se calculează cu ajutorul relaţiilor (4.39) şi (4.40) pentru cazul tracţiunii la puntea faţă.
, (4.39)
. (4.40)
Operând aceleaşi simplificări ca în cazul anterior, se obţine:
(5.84)
La deplasarea autovehiculului în palier, când p = 0, rezultă
. (5.85)
Cazul tracţiunii integrale Reacţiunile tangenţiale la roţi, limitate de aderenţă, sunt: . (5.86)
unde Z1 şi Z2 sunt reacţiunile normale de la cele două punţi, limitate de
aderenţă, ale căror mărimi se calculează cu ajutorul relaţiilor (4.45) şi (4.46) pentru cazul tracţiunii integrale.
, (4.45)
, (4.46)
Procedând ca în cazurile anterioare, rezultă: . (5.87)
La deplasarea autovehiculului în palier, când p = 0, rezultă
. (5.88) Pentru a analiza comparativ performanţele de accelerare la limita de aderenţă în
cele trei cazuri, se compară relaţiile (5.81), (5.84) şi (5.87):
;

;
. Se constată că, pentru aceleaşi condiţii de drum şi pentru autovehicule cu
aceleaşi coordonate ale centrului de greutate, . În cazul tracţiunii spate, acceleraţia este mai mult decât direct proporţională cu
valoarea coeficientului de aderenţă. În cazul tracţiunii faţă, acceleraţia este mai puţin decât direct proporţională cu
valoarea coeficientului de aderenţă. În cazul autovehiculului cu tracţiune integrală, acceleraţia maximă nu este
influenţată de poziţia centrului de greutate. Cu cât panta este mai accentuată, cu atât acceleraţia maximă va fi mai mică. Aplicaţie numerică Se consideră trei autoturisme având şi . Ele se urcă un drum
înclinat cu p = 5° şi având φx = 0,6. Să se determine valoarea maximă a acceleraţei
limitate de aderenţă pentru cele trei autoturisme: primul cu soluţia totul faţă, al doilea cu soluţia clasică şi ultimul cu tracţiune integrală.
;
;
.
Să se efectueze calculele pentru φ’x = 0,35.
;
;
. Variaţia acceleraţiei maxime este: ;

;
.
Deci cel mai puţin sensibil la modificarea condiţiilor de aderenţă este autovehiculul cu tracţiune integrală şi cel mai sensibil, autoturismul cu soluţia clasică.
În realitate, autovehiculul cu tracţiune clasică are o altă poziţionare a centrului de
greutate, mai spre puntea spate. De exemplu, în cazul analizat pentru φx = 0,6 se poate
considera , menţinându-se neschimbată înălţimea centrului de greutate.
. Se constată că deplasarea centrului de greutate în sensul arătat este benefică
din punct de vedere al acceleraţiei maxime.
În cazul demarajului pe teren orizontal, în cazul φx = 0,6 se obţine:
;
;
.
5.6.2 Caracteristicile de accelerare
Caracteristicile de accelerare reprezintă dependenţa timpului de accelerare (td) şi spaţiului de accelerare (Sd) de viteza autovehiculului atunci când motorul funcţionează la sarcină totală.
Timpul de accelerare reprezintă timpul necesar creşterii vitezei autovehiculului între două valori date, iar spaţiul de accelerare reprezintă spaţiul parcurs de autovehicul în acest timp.
Timpul de demarare reprezintă timpul în care autovehiculul, plecând de pe loc, ajunge la o viteză reprezentând 0,9 din viteza sa maximă, atunci când motorul funcţionează la sarcină totală, iar spaţiul de demarare reprezintă spaţiul parcurs în timpul respectiv.
Din expresia acceleraţiei , se poate scrie:
, (5.89)
de unde rezultă că timpul de accelerare de la viteza iniţială v0 la viteza curentă v td se calculează prin integrarea
. (5.90)
Pentru o anumită treaptă a SV, integrala (5.90) devine: . (5.91)
Rezolvarea integralei prin metoda trapezelor
, (5.92)
în care ∆V este pasul de integrare constant între vitezele V0k şi Vn = V,
, , … , sunt valorile acceleraţiei din treapta respectivă a SV corespunzătoare vitezelor , V1, V2, … , Vn.
Rezolvarea integralei prin metoda Simpson
(5.93)
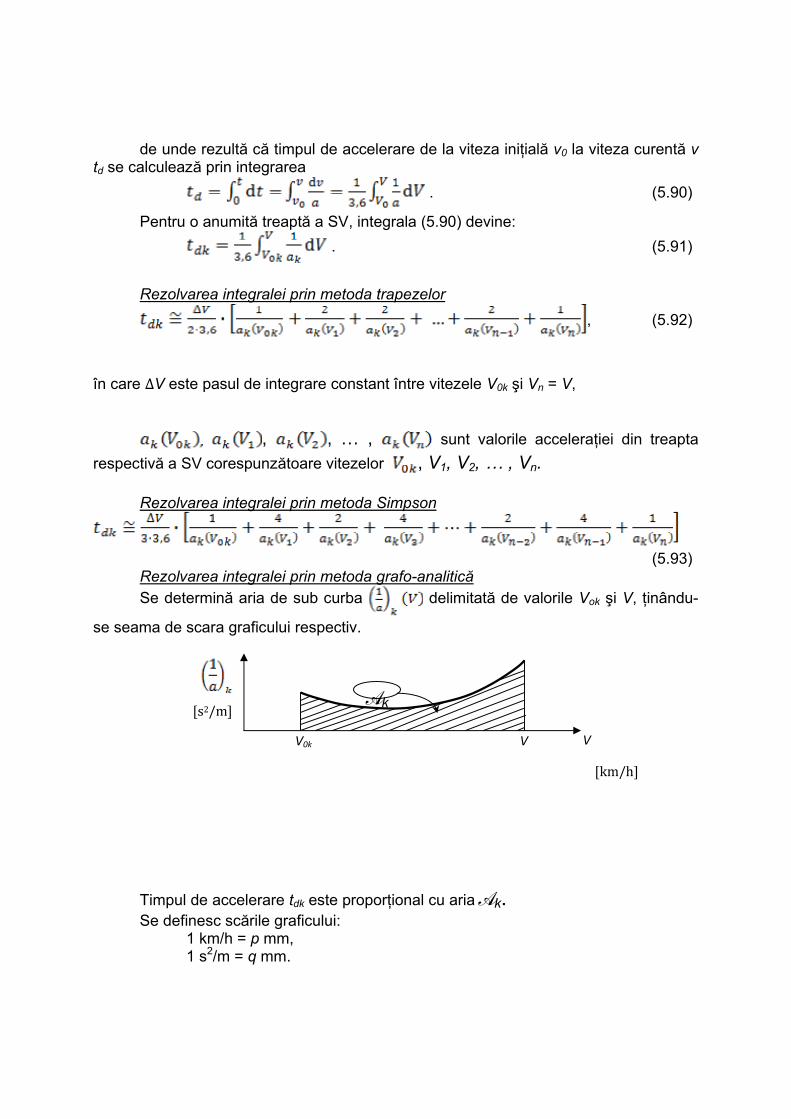
Rezolvarea integralei prin metoda grafo-analitică Se determină aria de sub curba delimitată de valorile Vok şi V, ţinându-
se seama de scara graficului respectiv. Timpul de accelerare tdk este proporţional cu aria Ak. Se definesc scările graficului: 1 km/h = p mm, 1 s2/m = q mm.
Ak
V V0k V
s2/m
km/h
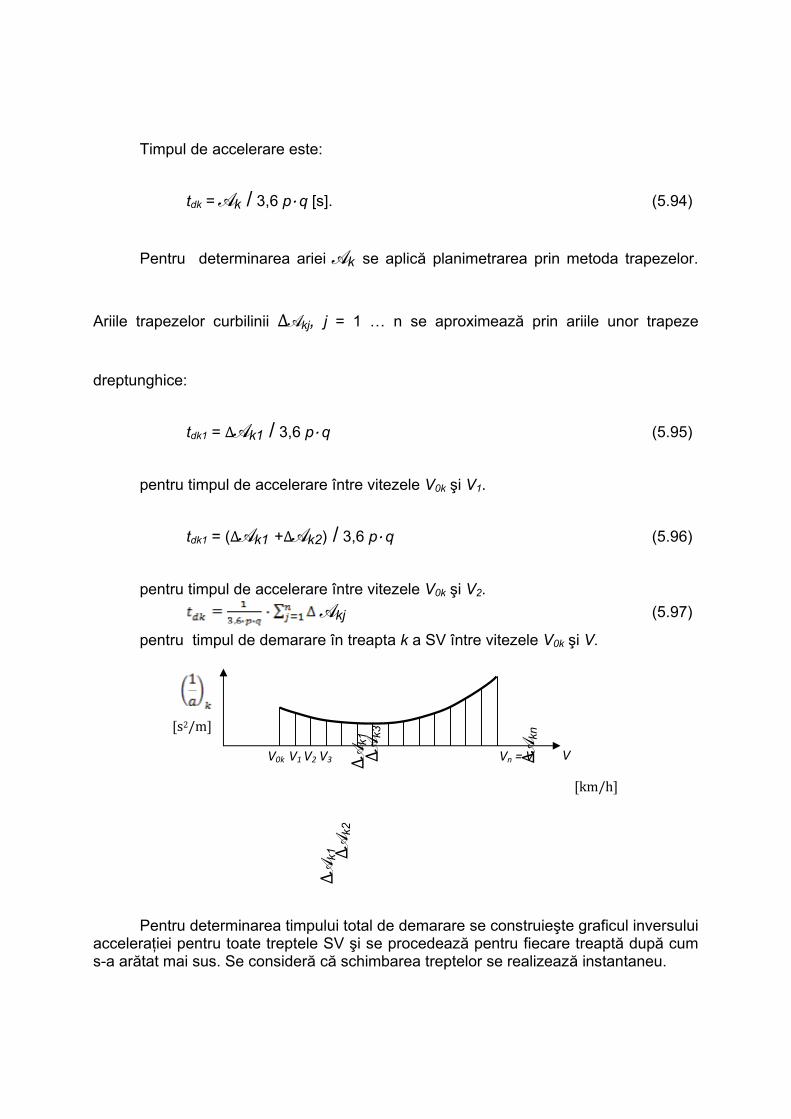
Timpul de accelerare este:
tdk = Ak / 3,6 p· q [s]. (5.94)
Pentru determinarea ariei Ak se aplică planimetrarea prin metoda trapezelor.
Ariile trapezelor curbilinii ∆Akj, j = 1 … n se aproximează prin ariile unor trapeze
dreptunghice:
tdk1 = ∆Ak1 / 3,6 p· q (5.95)
pentru timpul de accelerare între vitezele V0k şi V1.
tdk1 = (∆Ak1 +∆Ak2) / 3,6 p· q (5.96)
pentru timpul de accelerare între vitezele V0k şi V2. Akj (5.97)
pentru timpul de demarare în treapta k a SV între vitezele V0k şi V. Pentru determinarea timpului total de demarare se construieşte graficul inversului
acceleraţiei pentru toate treptele SV şi se procedează pentru fiecare treaptă după cum s-a arătat mai sus. Se consideră că schimbarea treptelor se realizează instantaneu.
∆Ak1
∆Ak2
V V0k Vn = V
s2/m
km/h
∆Ak1
∆A
k3
∆Akn
V1 V2 V3
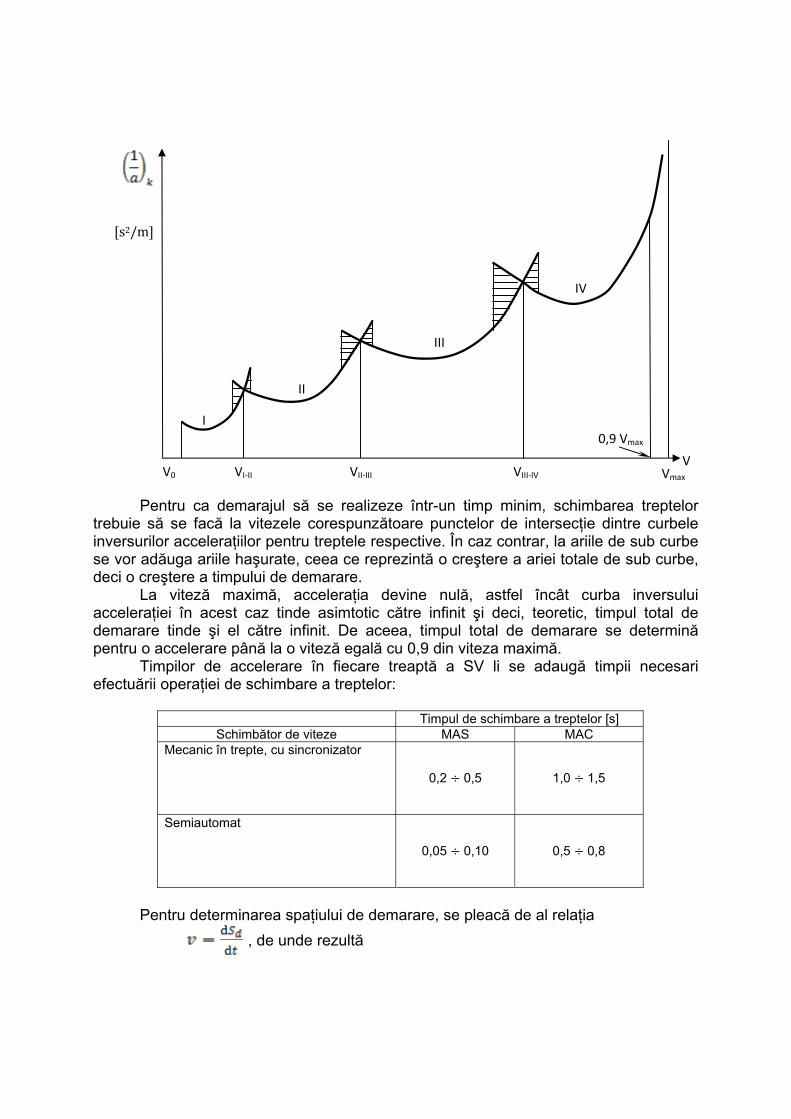
Pentru ca demarajul să se realizeze într-un timp minim, schimbarea treptelor
trebuie să se facă la vitezele corespunzătoare punctelor de intersecţie dintre curbele inversurilor acceleraţiilor pentru treptele respective. În caz contrar, la ariile de sub curbe se vor adăuga ariile haşurate, ceea ce reprezintă o creştere a ariei totale de sub curbe, deci o creştere a timpului de demarare.
La viteză maximă, acceleraţia devine nulă, astfel încât curba inversului acceleraţiei în acest caz tinde asimtotic către infinit şi deci, teoretic, timpul total de demarare tinde şi el către infinit. De aceea, timpul total de demarare se determină pentru o accelerare până la o viteză egală cu 0,9 din viteza maximă.
Timpilor de accelerare în fiecare treaptă a SV li se adaugă timpii necesari efectuării operaţiei de schimbare a treptelor:
Timpul de schimbare a treptelor [s]
Schimbător de viteze MAS MAC Mecanic în trepte, cu sincronizator
0,2 0,5 1,0 1,5
Semiautomat
0,05 0,10 0,5 0,8
Pentru determinarea spaţiului de demarare, se pleacă de al relaţia , de unde rezultă
s2/m
V
0,9 Vmax
VmaxV0 VI‐II VII‐III VIII‐IV
I
II
III
IV
. (5.98)
Deci pentru o treaptă a SV: . (5.99)
Aplicând metoda trapezelor, se obţine: . (5.60)
În cazul metodei Simpson, rezultă: (5.61)
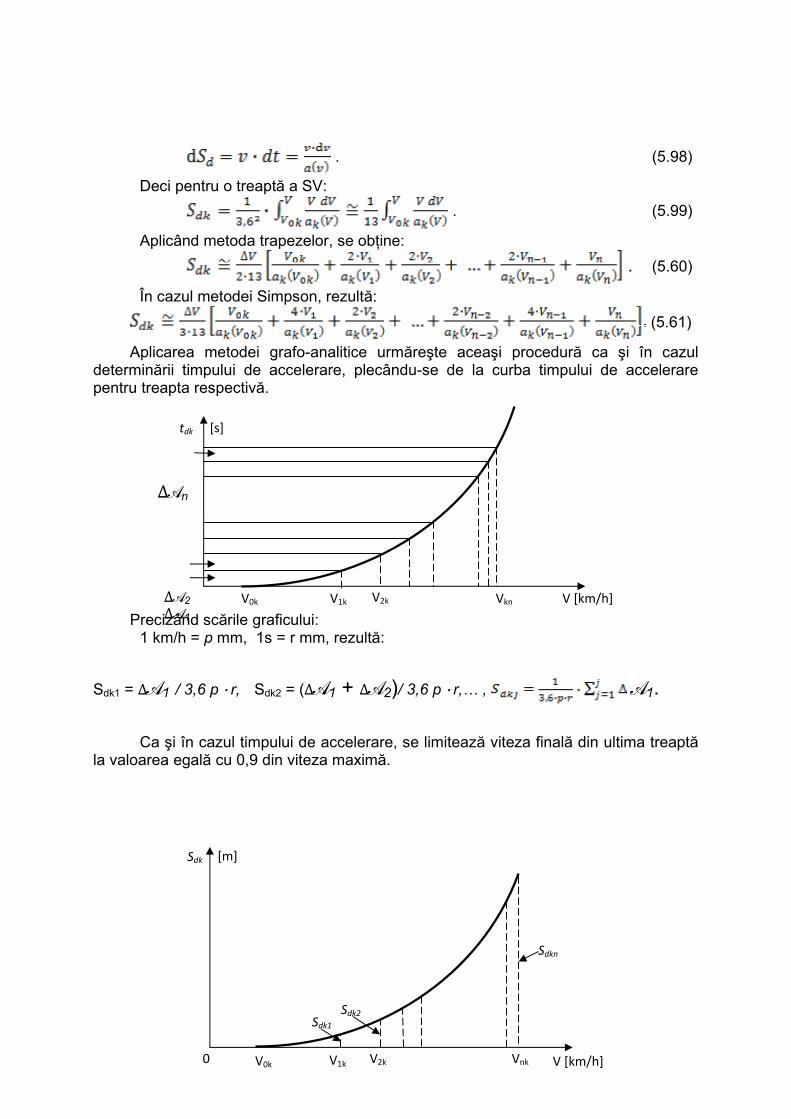
Aplicarea metodei grafo-analitice urmăreşte aceaşi procedură ca şi în cazul determinării timpului de accelerare, plecându-se de la curba timpului de accelerare pentru treapta respectivă.
Precizând scările graficului:
1 km/h = p mm, 1s = r mm, rezultă:
Sdk1 = ∆A1 / 3,6 p · r, Sdk2 = (∆A1 + ∆A2)/ 3,6 p · r,… , A1.
Ca şi în cazul timpului de accelerare, se limitează viteza finală din ultima treaptă la valoarea egală cu 0,9 din viteza maximă.
∆A1
∆A2 V2k
∆An
V0k V1k Vkn V [km/h]
tdk [s]
V0k V1k V2k V [km/h] Vnk
Sdk
Sdk1Sdk2
Sdkn
[m]
0
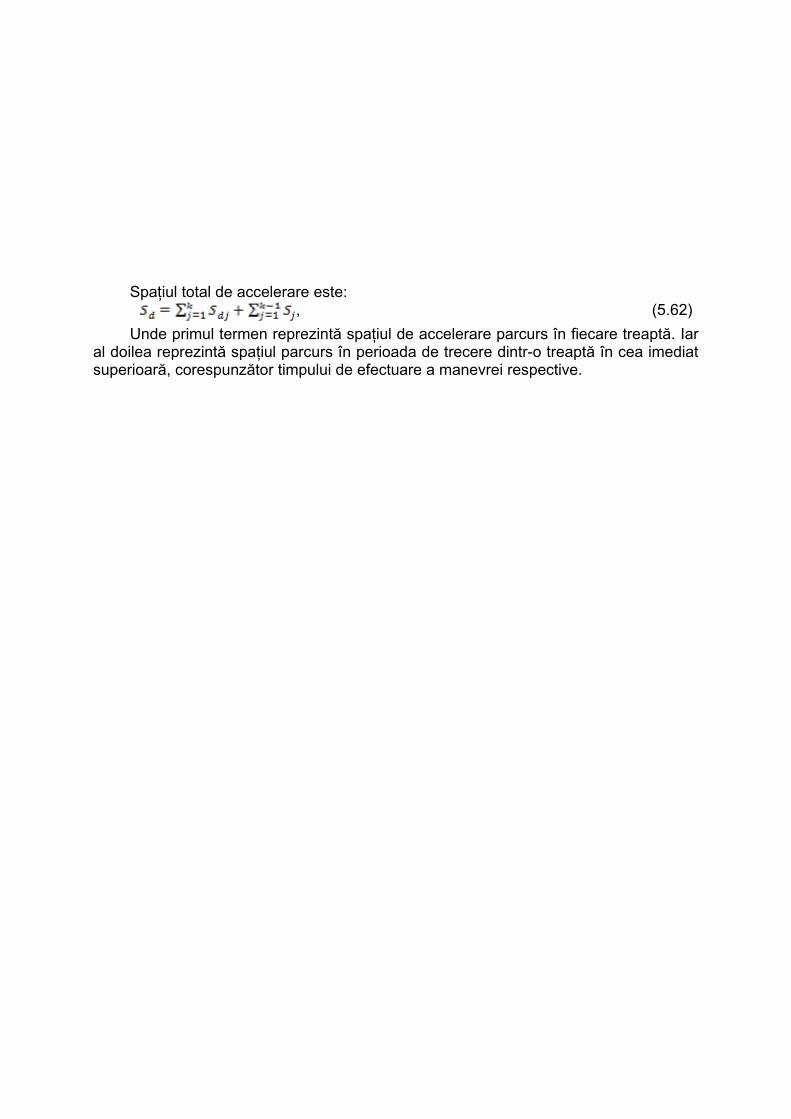
Spaţiul total de accelerare este: , (5.62) Unde primul termen reprezintă spaţiul de accelerare parcurs în fiecare treaptă. Iar
al doilea reprezintă spaţiul parcurs în perioada de trecere dintr-o treaptă în cea imediat superioară, corespunzător timpului de efectuare a manevrei respective.