17c13 2017 yasuda - rise.sci.waseda.ac.jp ·...
TRANSCRIPT

知覚支援装置-神経リハビリテーションの融合による機能回復戦略
研究代表者 安田 和弘
(理工学術院総合研究所 次席研究員)
1. 研究課題
本邦において脳血管障害の罹患者は約 130 万人と多く,後遺症である運動,感覚麻痺や高次脳機
能障害は日常生活への復帰を著しく阻害する.身体障害のなかでも,立位バランスおよび歩行障害
は生活自立を制限する主たる要因のため,リハビリテーションを効率良く進めることが求められる.
また,高次脳機能障害である半側空間無視 (USN)は,脳卒中の約 40%に観察される症状で,脳損傷
の反対側の空間を無視することで移動中に障害物に衝突する等,生活自立の阻害原因となっている.
これらの日常生活自立を妨げる障害に対して,本研究では,1)脳卒中患者の立位バランス・歩行
における足圧中心の時間的,空間的変化を有効に体性感覚フィードバックする装置の開発,2)USN
に対する仮想空間(VR)を用いたリハビリテーション支援システムの開発,およびリハビリテーシ
ョンにおける効果検証を目的とする.
2. 主な研究成果(1)
2.1 システムの開発
本研究で取り組むバランス支援 RT の構成図をエラー! 参照元が見つかりません。に示した.バ
ランス支援 RT は大きく足圧取得用 Wii ボードと骨盤ベルト,タブレット PC(ソフトウェア・通信)
の 3 つから構成されている.本装置では,センサで取得した足圧位置情報を体幹に配置した振動子
に伝達することで,異常な身体の偏りを感知させる.さらに本システムでは,体幹へのバイオフィ
ードバック(BF)を療法士へも伝達することで教示や褒め等のフィードバックを効率化することが
できる(エラー! 参照元が見つかりません。-B).
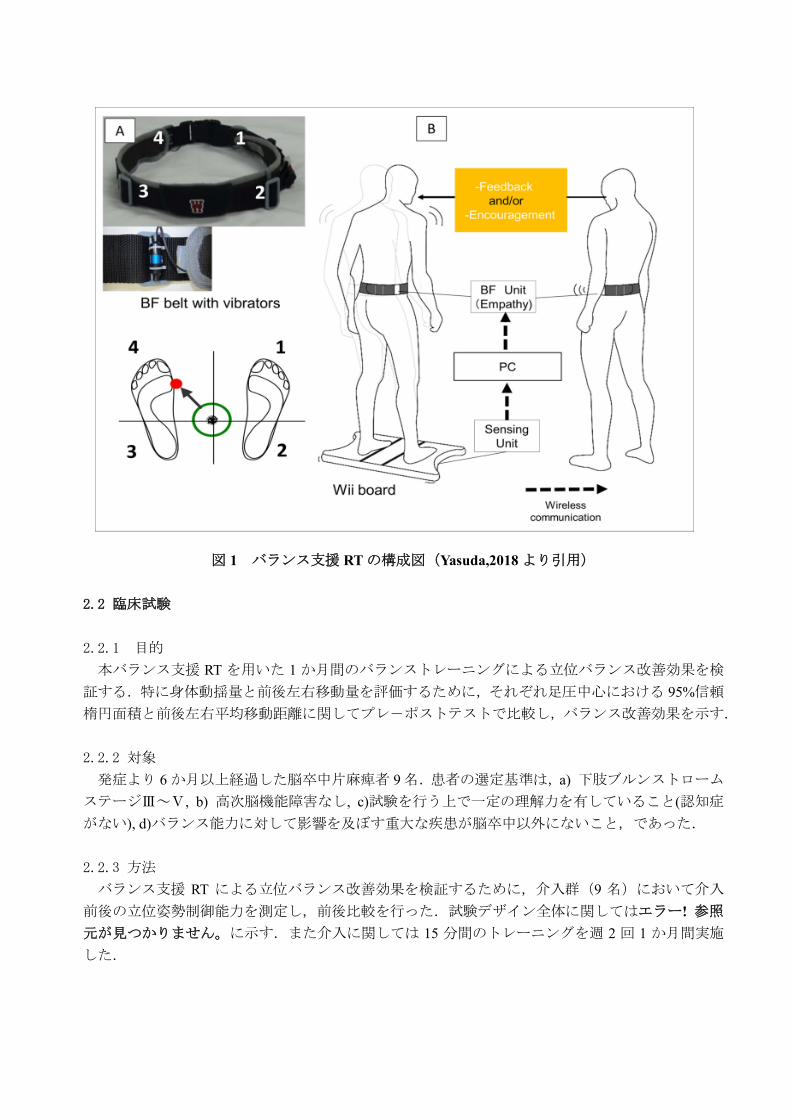
図 1 バランス支援 RT の構成図(Yasuda,2018 より引用)
2.2 臨床試験
2.2.1 目的
本バランス支援 RT を用いた 1 か月間のバランストレーニングによる立位バランス改善効果を検
証する.特に身体動揺量と前後左右移動量を評価するために,それぞれ足圧中心における 95%信頼
楕円面積と前後左右平均移動距離に関してプレ-ポストテストで比較し,バランス改善効果を示す.
2.2.2 対象
発症より 6 か月以上経過した脳卒中片麻痺者 9 名.患者の選定基準は,a) 下肢ブルンストローム
ステージⅢ~Ⅴ, b) 高次脳機能障害なし, c)試験を行う上で一定の理解力を有していること(認知症
がない), d)バランス能力に対して影響を及ぼす重大な疾患が脳卒中以外にないこと,であった.
2.2.3 方法
バランス支援 RT による立位バランス改善効果を検証するために,介入群(9 名)において介入
前後の立位姿勢制御能力を測定し,前後比較を行った.試験デザイン全体に関してはエラー! 参照
元が見つかりません。に示す.また介入に関しては 15 分間のトレーニングを週 2 回 1 か月間実施
した.

図 2 試験デザイン(Yasuda,2018 より引用)
プレ-ポストテストでは床反力計で立位姿勢動揺測定を 6 回行う.介入群では片麻痺者がバラン
ス支援 RT を装着して療法士からのフィードバックを受けながらトレーニングを実施する.バラン
ス支援 RT を用いたトレーニングについてはトレーニングプロトコル(30 秒間×10 セッション)を
15 分間行う.BF 情報の利用の仕方ついては担当療法士からベルトの振動子と身体動揺の関係を教
示し,それに基づいて患者はトレーニングにフィードバックを利用する.
片麻痺者のバランスにおけるパフォーマンスの評価として足圧中心における 95%信頼楕円面積
(身体動揺面積),前後左右の動揺評価として前後左右平均移動量,前後左右距離標準偏差を測定
する.さらに臨床的バランス評価項目として,Berg Blance Scale (BBS),Functional Reach Test (FRT),
Timed Get up and Go Test(TUG)を測定する.前後比較のために平均値を算出し,ウィルコクソン
符号順位検定にて比較検証した.
2.2.4 結果
姿勢動揺量・臨床的バランス評価項目の前後比較結果を表 1 に示した.
(1)姿勢動揺量の評価
95%信頼楕円面積で前後間に有意傾向があり,事後測定にて動揺量が減少した(p<0.1).その他
の変数では前後間に有意差は認めなかった.
(2)臨床的バランス評価
BBS,FRT,TUG にて前後間で有意差を認めた(p<0.01). 一方で BBS のみ臨床的に意義のある
差(Minimal Detectable Change ;MDC)には至らなかった.

表 1 各変数のプレ-ポスト比較(Yasuda,2018 より引用)
2.2.5 結論
・バランス支援 RT を作成し,片麻痺者のリハビリテーションにおける効果を検証するために 1 か
月間の介入試験を実施した.
・バランス支援 RT を用いたトレーニングによる立位バランス能力の改善効果を明らかにするため,
介入前後の比較を行った.その結果,身体動揺面積で有意傾向,臨床的バランス評価で有意にバ
ランス能力が改善した.しかしながら,複合的バランス検査である BBS は臨床的に意義のある変
化までは至らなかった.
・1 か月のバランス支援 RT による介入は,6 か月以上経過した慢性期脳卒中患者の立位姿勢制御の
効率性を高める運動力学的変化を導きだした.臨床的バランス指標も改善したことから,脳卒中
患者でのバランス障害に対して,本装置は運動(再)学習を促進することにおいて有利性が期待
される.
・複合的なバランス能力のみに効果の制約が見られたために,BF 呈示あるいはトレーニング手法
の再考を要する.
3. 主な研究成果(2)
3.1 システムの開発
これまで説明してきたバランス支援 RT では,姿勢安定性向上を目的としてきたが,脳卒中患者
では歩行能力を向上させる必要性が高い.臨床では歩行トレーニングが頻繁に実施されているが,
脳卒中患者は動作に努力を要する課題では,過剰な筋緊張からつま先接地を誘発することがある.
しかしながら,麻痺患者は感覚麻痺を有することが多く,自己修正ができないケースが大半である.
このような異常な筋緊張や感覚麻痺による修正不全を避けるために,本研究では,新たに開発した
歩行用知覚支援 RT を用いて足底接地感覚を代行する機構を案出した.本装置では足底に圧力セン
サを挿入し,接地部位を背部に振動フィードバックする.さらに,療法士にも振動フィードバック
する共感型システムを付与することで,適切な教示や褒めを患者に提示できる.

図 3 歩行用知覚支援 RT の構成図(Saichi ,Yasuda and Iwata, 2016 より引用)
3.2 基礎試験
3.2.1 目的
歩行用知覚支援 RT の中期に及ぶ実行可能性検証として 1 名の片麻痺患者に対して 2 週間の介入
を実施し影響を検証する.
3.2.2 対象
実験参加者は,本研究の趣旨を理解し,紙面上で同意の得られた回復期の脳卒中片麻痺患者 1 名
であった(年齢 56 歳,ブルンストロームステージⅤ,重度の感覚麻痺患者).
3.2.3 方法
回復期の片麻痺者 1 名を対象に,合計 2 週間の介入を行った.介入は知覚支援 RT を用いた 20
分間の歩行訓練を各週 3 回ずつ,合計 6 回実施した.歩行訓練では,患者及び療法士が知覚共感
ウェアを着用し,歩行中の患者の麻痺側足底圧を背部へ振動バイオフィードバックした.これによ
り,患者は接地状態を知覚しながら歩行し,それに対して療法士はバイオフィードバックに基づい
て動作指導を行った.測定は介入開始前,介入開始 1 週間後,介入開始 2 週間後の計 3 回行っ
た.各測定日で歩行パフォーマンスの評価指標として 10m 歩行速度,麻痺側の蹴り出しの評価指
標として床反力計 P-walk(BTS 社)を用いて健足重複歩距離を測定した.

図 4 中期介入試験の手順
3.2.4 結果
健足重複歩距離の結果を図 5(左)に示す.各測定日の結果は Steel-Dwass 法を用いて多重比
較を行った.介入前と比べて介入 1 週目,介入 2 週目ともに健側重複歩距離は有意に上昇した
(p=0.046,p=0.017).10m 歩行速度は週毎に低減する傾向が得られた.
図 5 重複歩距離・歩行速度の推移
3.2.5 結論
・歩行用知覚支援 RT を開発し,感覚障害によって運動修正が困難な症例を対象として 2 週間の介
入を行い,歩行学習効果を検証した.
・健足重複歩距離が上昇した結果から,知覚支援 RT による歩行能力の改善を認めた.また,10m
歩行速度についても向上したことから,運動修正の結果を歩行パフォーマンスに反映することが
できた.
・試験結果より本装置により感覚麻痺が重度の患者に対して運動学習効果が見られ,歩行パフォー
マンスの向上にも繋がることを示唆した.
・より多くの症例に対する知覚支援 RT の効果を明らかにするとともに,効果の持続性についても
検証する必要がある.
4. 主な研究成果(3)
4.1 半側空間無視(USN)治療システムの開発
機器は,ヘッドマウントディスプレイ(Oculus Rift Development Kit 2, Oculus VR, Inc.),およ
び手指モーションキャプチャ (Leap Motion, Leap Motion, Inc.) から構成される(図 6). システ

ムではセンサとモーションキャプチャによって頭部と手指の運動をトラッキングしているため,
VR 空間内に患者の動きを反映できる.
図 6 USN 治療システムの全体像 (Yasuda,2017 から引用)
VR 環境はソフトウェア(Unity , Unity Technologies)を用いて開発された. 近位・遠位空間の無
視の治療を行うため, 2 種類の環境を開発した. 近位遠位治療に用いる共通した仮想空間の部屋(20
m×20 m×8 m)を用意し, その中に机を用意した(図 7).
遠位無視治療環境では,部屋の奥の壁面に 7 つの視覚刺激を設置した(図 7). 視覚刺激は, 時
間経過とともに順に左方へと点滅していき, 各視覚刺激の点滅時間は 6 秒であった. 近位無視治療
環境では, 机の上の手指モーションキャプチャによる参加者の手の移動範囲内に 3 つのオブジェク
トを設置した. 参加者が自身の手を動かすことで VR の手を移動させることができ, VR の手が設置
したオブジェクトに接触すると赤く着色される(図 8).
遠位・近位 VR 環境で注意を左方へ誘導するために, 移動するスリットを付加し, 患者が見える
映像を徐々に左方へ誘導した(図 9). スリットの動きは時間経過とともに参加者を中心として 155°
回転する(回転スリットの認識可能角度を 45 deg, 回転速度を 2.58 deg/s と一定にした:1 分間
で 155°回転).

図 7 実験に用いた VR 環境 (Yasuda,2017 から引用)
図 8 遠位・近位空間課題 (Yasuda,2017 から引用)

図 9 可動式スリット (Yasuda,2017 から引用)
4.2 臨床試験
4.2.1 目的
USN治療支援システムを用いたトレーニングプロトコルによる無視症状の改善効果を検証する.
USN の評価バッテリである行動性無視検査日本版(Behavioural inattention test: BIT)に基づいた
線分抹消課題,星印抹消課題,文字抹消課題,線分二等分課題を用いて,遠位・近位空間における
成績をプレテストとポストテストで比較して無視改善効果を示す.また,日常生活における無視を
評価する CBS(Catherine Bergego Scale)を併せて計測することで紙面上の無視と日常生活無視
への影響を議論する.
4.2.2 対象
対象は 70 代男性,右利き.右中大脳動脈領域の脳梗塞を発症し,紙面での検査にて USN を認めた.
4.2.3 方法
介入は ABA デザインにて実施した.従来法(A)・VR 法(B)での介入を 6 週間ずつ,さらに従来法
(A)を 3 週間継続した.
介入中に参加者は椅坐位姿勢をとった.介入は 2 つのプログラムで構成された.最初の“点滅刺
激回答”プログラムでは,遠位無視治療環境を用いた. 参加者は時間経過とともに順に点滅していく
壁面に存在する 7 つの視覚刺激に目を向け,声に出して回答した.次の近位無視治療環境ではオブ

ジェクトに対するリーチ課題を実施した. 参加者は VR の手を机の上に存在する 3 つのオブジェク
トに伸ばすことで触れた.各プログラムは 1 分間(1 走査)×3 セット行い,プログラム間では 30
秒のインターバルを設けた.
介入前および各期終了時に紙面(近位),およびスクリーン(遠位)での評価(線分二等分試験,線分
抹消試験)を実施した. 参加者は,BIT 行動性無視検査日本版に基づいた線分抹消課題,星印抹
消課題,文字抹消課題,線分二等分課題を介入の直前と直後に近位空間(紙面上),遠位空間(プ
ロジェクターにより画像が投影されたスクリーン)で行った.患者からスクリーンまでの距離は約
2.5 mであった.線分抹消課題,星印抹消課題,文字抹消課題では,BIT の計算方法に基づき,抹
消した個数を計算した.線分二等分課題では,二等分点から真の中点までの偏倚率を計算し,これ
をもとに BIT 得点を算出した.また,各期の検査と併せて CBS を測定した.
4.2.4 結果
表 2 に各変数の推移を示す.近位・遠位空間の BIT では, 線分抹消試験・線分二等分線において改
善を認めたが,CBS において変化を認めなかった.
表 2 介入経過における各指標の推移(Yasuda, 2018 より引用)
4.2.5 結論
・USN に対して,仮想空間を用いて非無視側の情報を遮断する治療支援システムを開発し,近位
空間,遠位空間における無視症状を有効に改善させるための課題を案出した.
・無視症状を有する患者 1 名に開発したシステムおよび課題を 6週間に渡り適応し,効果検証した.
・開発したシステムによる介入で遠位・近位空間無視は紙面上で改善を示したが,日常生活上の無
視は変化を認めなかった.
・日常生活で改善がみられなかった原因追及およびシステムへの反映を実施する必要がある.
5. 共同研究者
岩田 浩康(創造理工学部・総合機械工学科・教授)
齋地 健太(創造理工学部・総合機械工学科・修士 2年)
原島 宏明(総合東京病院・リハビリテーション科・課長)
貝吹 奈緒美(総合東京病院・リハビリテーション科・理学療法士)
北地 雄(総合東京病院・リハビリテーション科・理学療法士)
室井 大佑(亀田リハビリテーション病院・理学療法士)
大平 雅弘(横浜新緑総合病院・作業療法士)
6. 研究業績

学術論文
・福嶋勇太,安田和弘, 鈴木慈 ,大橋洋輝,岩田浩康, 「脳卒中片麻痺歩行に対するばねと人
工筋肉を用いた背屈支援装置の開発-踵接地時の膝折れ挙動に対する影響の検証-」,ライフサ
ポート学会誌(印刷中)
・Yasuda K , Saichi K, Iwata H. Haptic-based perception-empathy biofeedback enhances
postural motor learning during high-cognitive load task in healthy older adults, Frontiers in
Medicine (in press)
・ Yasuda K, Saichi K, Kaibuki N, Harashima H , Iwata H. Haptic-based
perception-empathy biofeedback system for balance rehabilitation in chronic stroke patients:
Concepts and initial feasibility study, Gait and Posture. (in press)
・Yasuda K , Muroi D, Hirano M, Saichi K, Iwata H. Differing effects of an immersive virtual
reality program on unilateral spatial neglect on activities of daily living, BMJ Case
Report, Mar 9;2018. pii: bcr-2017-222860. DOI:10.1136/bcr-2017-222860
・Yasuda K, Saichi K, Kitaji Y, Harashima H , Iwata H. Development of an Implicit Method
for Directing Weight Shifting to the Affected Side in Patients with Stroke: A Proof of Concept
Study. ROBOMECH Journal vol4(26).DOI:10.1186/s40648-017-0094-2
・河田 俊, 安田 和弘, 岩田 浩康, フリースロー初心者のための BF 型セット・フォーム習得支援
RT の 開 発 , 日 本 機 械 学 会 論 文 集 ,Vol.83, No.851, p16-00515, 2017. DOI:
10.1299/transjsme.16-00515
・Yasuda K, Muroi D, Ohira M, Iwata H, Validation of an immersive virtual reality system for
training near and far space neglect in individuals with stroke: a pilot study. topics in stroke
rehabilitation. Vol. 24, no. 7, 533–538.DOI:10.1080/10749357.2017.1351069
・Yasuda K, Kaibuki N, Harashima H, Iwata H, The effect of a haptic biofeedback system on
postural control in patients with stroke: an experimental pilot study, Somatosensory and
Motor Research, vol34;2,pp65-71,2017. DOI: 10.1080/08990220.2017.1292236
総説・著書
・「感覚増幅技術を用いたリハビリテーションの新展開」日本支援工学理学療法学会ホームページ
特集テーマ 「リハビリテーションと工学連携の実践」, 日本支援工学理学療法学会
・Kinovea:Motion Capture Software (日本語版マニュアル),Research Gate に公開
https://www.researchgate.net/profile/Kazuhiro_Yasuda2
招待講演
・日本神経理学療法学会 参加型フォーラム 2017 指定討論者「感覚代行 / 補完技術を応用した
工学的支援技術 -バランス・歩行リハビリテーションへの応用- 」主催: 日本神経理学療法学
会,2017 年 11 月 4 日
受賞・表彰
・SCF 計測展 2017 大学・高専テクニカルアカデミー研究発表コンテスト最優秀賞
「在宅脳卒中患者のための知覚共感型遠隔リハビリテーションシステム」2017 年 12 月 1 日:共同
発表者
学会発表
・Jing-Chen Hong, Yuta Fukushima, Shigeru Suzuki, Kazuhiro Yasuda, Hiroki Ohashi, Hiroyasu Iwata.
"Estimation of Ankle Dorsiflexion Ankle during Loading Response Phase for Spring Coefficient

Identification", IEEE International Conference on Robotics and Biomimetics 2017, Dec. 5~8, 2017,
Macau, China
・ Kazuhiro Yasuda, Kenta Saichi, Naomi Kaibuki, Hiroaki Harashima, Hiroyasu Iwata,Clinical
Effectivenes of a haptic-based perception-empathy biofeedback system for balance rehabilitation in
patients with chronic stroke. 10th World Congress for NeuroRehabilitation (WCNR). 7-10 Feb, The
Renaissance Mumbai Convention Centre Hotel, Mumbai, India
・Kentarou Kodama, Kazuhiro Yasuda, Kouhei Sonoda, Behavioral strategy of stepping-over: differences
in obstacle’s height and individuals, Forth International Workshop on Skill Science, 13 Nov, 2017.
・Kentarou Kodama, Kazuhiro Yasuda, Kouhei Sonoda,How does stepping-over behavior change
depending on the obstacle height? , 23th International conference. International Society for Posture&
Gait Research, 25-29 June, Fort Lauderdale, Florida, USA
・平野瑞樹, 室井大佑, 安田和弘, 齋地健太, 萩原晨功, 岩田浩康, 「右中大脳動脈領域の脳梗塞
により半側空間無視が遷延化した事例に対する没入型 VR を用いた介入の適応」,第 55 回日本
リハビリテーション医学会,2018 年 6 月 28~7 月 1 日, 福岡
・齋地健太,安田和弘,岩田浩康,「知覚支援 RT の効果機序分析に基づく歩行能力質的評価手法
の構築」,第 27 回ライフサポート学会フロンティア講演会,E5-1,2018 年 3 月 9 日~10 日,
東京
・齋地健太,安田和弘,北地雄,原島宏明,岩田浩康,「触覚バイオフィードバックに基づく歩
行リハビリ支援システム-第 14 報:知覚共感ウェアによる中期介入効果検証-」,第 18 回計測自
動制御学会システムインテグレーション部門講演会,2017 年 12 月 20-22 日,宮城
・児玉謙太郎, 山際英男, 安田和弘,「動的身体適応力のトレーニングと評価に関する予備的検討」,
日本機会学会シンポジウム:スポーツ工学・ヒューマンダイナミクス 2017, 2017 年 11 月 9-11
日,石川
・齋地健太,鈴木慈,安田和弘,福嶋勇太,岩田浩康:「片麻痺歩行リハビリにおける運動支援
及び感覚支援を両立する運動・知覚統合支援装置の開発」,第 38 回バイオメカニズム学術講演
会,2017 年 11 月 4~5 日,大分
・大西哲平,相原伸平,安田和弘,岩田浩康:「バットスイング時の運動連鎖における体幹動作
を支援する振動型 BF デバイスの開発」,第 38 回バイオメカニズム学術講演会,2017 年 11 月
4~5 日, 大分
・齋地健太, 安田和弘, 岩本晃, 室井大佑, 岩田浩康,「半側空間無視の注意誘導を促す 3D-VR 型
可動スリットの動的環境への適応」,LIFE2017, 2017 年 9 月 15~17 日,東京
・平井大智, 福嶋勇太, 安田和弘, 大橋洋輝, 岩田浩康,「没入型 VR による下肢運動錯覚がミラー
ニューロンシステムに与える影響」,LIFE2017,2017 年 9 月 15~17 日, 東京
・萩原晨功, 安田和弘, 室井大佑, 大平雅弘, 齋地健太, 岩田浩康,「半側空間無視の物体中心無視
に対する 3D-VR 型 cueing システムの開発」,LIFE2017,2017 年 9 月 15~17 日,東京
・岩木将一郎,齋地健太,安田和弘,岩田浩康:「急性期片麻痺患者の下肢リハビリにおける随
意機能の誘発を目的としたマスタスレーブ式両足協調デバイスの開発」,第 35 回日本ロボット
学会学術講演会 RSJ 2017,2017 年 9 月 11~14 日,埼玉
・齋地 健太,安田 和弘,岩田 浩康,「触覚バイオフィードバックに基づく歩行リハビリ支援シス
テム-第 13 報:歩行訓練と加重移動訓練を実施可能な統合的知覚支援システムの提案-」,日本機
械学会 2017 年度年次大会,2017 年 9 月 3~6 日, 埼玉

・平野瑞樹, 室井大佑, 安田和弘, 齋地健太, 萩原晨功,岩田浩康, 近位・遠位空間無視を統合的に治
療可能な没入型VRシステムにおける中期介入効果の事例検討, 第41回日本高次脳機能障害学会
学術総会,2017 年 12 月 15-16 日,埼玉
・児玉謙太郎,安田和弘,園田耕平,「身体でスケール化された高さの障害物の跨ぎ越え:行為安定
性の変化に関する予備的検討」,日本認知科学会第 34 回大会, 2017 年 9 月 13〜15 日, 石川
・安田 和弘,室井 大佑,大平 雅弘,岩田 浩康, 3 次元仮想空間内における右方空間のブラックア
ウトによる半側空間無視に対する注意誘導効果 身体近傍・身体外空間および課題特異的効果に
基づいたシステムデザイン-, 第 52 回日本理学療法学術大会,2017 年 5 月 12~14 日,千葉
社会活動・その他
・「脳卒中後のリハビリに VRを!」日経デジタルヘルス(デジタルヘルス事例),Nikkei Business
Publications, Inc,2018 年 1 月 17 日公開
http://tech.nikkeibp.co.jp/dm/atcl/feature/15/327441/011600293/?ST=health
・[Featured article」として掲載:Yasuda K, Saichi K, Kitaji Y, Harashima H , Iwata H. Development of
an Implicit Method for Directing Weight Shifting to the Affected Side in Patients with Stroke: A Proof of
Concept Study. ROBOMECH Journal vol4(26),2017 年 12 月
・「ニューロリハビリテーションと工学」,オーガナイズドセッション企画,生活生命支援医療福祉
工学系学会連合大会(LIFE2017)第 33 回ライフサポート学会大会,第 17回日本生活支援工学会大
会,日本機械学会 福祉工学シンポジウム 2017
7. 研究活動の課題と展望
バランス支援 RT(安定性)においては基礎試験が完了しているため,今後はインソール型の圧
力センサへ移行を進め,ユーザビリティを高める.また,歩行用知覚支援 RTにおいては適応患者
数を増やし効果の妥当性を検証する.USN 治療支援システムは,特に日常生活に有効となる課題の
再検討が必要であり,さらに患者数を増やし頑健な試験を実施する.加えて,無視の定量評価が
可能な評価システムの案出に着手する予定である.