xiii semana regional de investigacin y docencia en...
TRANSCRIPT

XVI SEMANA REGIONAL DE INVESTIGACIÓN Y DOCENCIA EN MATEMÁTICAS
27 de Febrero al 3 de Marzo de 2006
MEMORIAS
Editores Roberto Núñez González
Horacio Leyva Castellanos
DEPARTAMENTO DE MATEMÁTICAS
DIVISIÓN DE CIENCIAS EXACTAS Y NATURALES
UNIVERSIDAD DE SONORA
DIRECTORIO
Dr. Pedro Ortega Romero
Rector de la Universidad de Sonora
Dr. Enrique Velázquez Contreras Secretario General Académico
Dr. Heriberto Grijalva Monteverde
Vicerrector, Unidad Regional Centro
Dr. Rogelio Monreal Saavedra Director de la División de Ciencias Exactas y Naturales
Dra. Guadalupe M. Ávila Godoy
Jefa del Departamento de Matemáticas
Consejo Editorial del Departamento de Matemáticas
Dr. Oscar Vega Amaya Coordinador General
M.C. Guillermo Dávila Rascón L.M. Francisco C. García Durán
Dra. Martha Guzmán Partida Dr. Jesús Adolfo Minjarez Sosa
M.C. Eduardo Tellechea Armenta
ii
COMITÉ ORGANIZADOR DE LA
XVI SEMANA REGIONAL DE INVESTIGACIÓN Y DOCENCIA EN MATEMÁTICAS
Dr. Fernando Verduzco González Presidente
M.C. Israel Segundo Caballero
Secretario
Dra. Martha Guzmán Partida M.C. Gudelia Figueroa Preciado
Dr. Roberto Núñez González Dr. Rodrigo González González
L. M. Arturo Fragozo Robles M.C. José D. Dávila Galindo
M.C. Horacio Leyva Castellanos M.C. Manuel A. Urrea Bernal
iii
PRESENTACIÓN
La Semana Regional de Investigación y Docencia en Matemáticas, organizada por el Departamento de Matemáticas de la Universidad de Sonora, es un importante foro académico en el que se exponen y discuten diversos tópicos relacionados con las matemáticas y sus aplicaciones, la computación y la docencia en matemáticas. Esto se ha logrado con el esfuerzo de la comunidad matemática de nuestro Departamento y el apoyo de instancias universitarias como la División de Ciencias Exactas y Naturales, la Dirección de Desarrollo Académico, la Vicerrectoría de la Unidad Regional Centro y la Rectoría. Han contribuido también significativamente al fortalecimiento de este evento, la Sociedad Matemática Mexicana, la Secretaría de Educación Pública a través de diversos programas de apoyo al desarrollo universitario. Igualmente importante es el apoyo de la Secretaría de Educación y Cultura del Estado de Sonora, y las Universidades Autónomas de Baja California, de Baja California Sur y Chihuahua. Uno de los principales objetivos de la Semana ha sido el de promover el intercambio de conocimientos, opiniones y experiencias entre estudiantes, profesores e investigadores de la región noroeste de México, con intereses en las matemáticas y sus aplicaciones, la computación y la docencia en matemáticas. Al mismo tiempo, se ha logrado que distinguidos académicos de instituciones nacionales y extranjeras participen como invitados especiales en las actividades de la Semana, lo que ha enriquecido la discusión de ideas entre los interesados en las disciplinas mencionadas. Para cumplir con los objetivos mencionados, en la Semana se organizan diferentes actividades tales como: conferencias plenarias, conferencias por invitación, mesas redondas, cursos cortos y ponencias por solicitud. Estas últimas pueden ser conferencias, reportes de investigación o reportes de tesis. La décimo sexta edición de la Semana se llevó a cabo del 27 de Febrero al 3 de Marzo de 2006 en las instalaciones del Departamento de Matemáticas de la Unidad Regional Centro de la Universidad de Sonora y en esta ocasión se contó con invitados especiales de las siguientes instituciones: Facultad de Ciencias de la Universidad Nacional Autónoma de México; Departamento de Matemáticas del Centro de Investigación y de Estudios Avanzados del Instituto Politécnico Nacional (CINVESTAV-IPN); Departamento de Matemáticas de la Universidad Autónoma Metropolitana, Unidad Iztapalapa; Universidad Autónoma de la Ciudad de México; Departamento de Electrónica y Telecomunicaciones del Centro de Investigación Científica y de Estudios Superiores de Ensenada; Facultad de Matemáticas de la Universidad Autónoma del Estado de México, y del Departamento de Matemáticas del Instituto Tecnológico Autónomo de México.
iv
Es oportuno recordar que los orígenes de la Licenciatura en Matemáticas, al igual que las de Física y Literatura y Letras Hispánicas, se remontan a la antigua Escuela de Altos Estudios, que inició el 4 de Marzo de 1964. Por tal motivo, ya se ha vuelto una tradición en nuestro Departamento celebrar esa fecha con una mesa redonda en la que un profesor de cada una de esas licenciaturas da sus puntos de vista sobre algún tópico de las matemáticas, desde la perspectiva de cada una de esas disciplinas. En esta ocasión el tema de la mesa fué "Las Distintas Manifestaciones de la Forma" y se tuvo una amena participación de los integrantes de la mesa y del público asistente. La XVI Semana Regional de Investigación y Docencia en Matemáticas reunió, además de los invitados especiales, a un nutrido grupo de participantes provenientes de diversas instituciones educativas del país, quienes participaron como ponentes o asistentes. El programa de actividades incluyó una conferencia inaugural; cuatro conferencias plenarias y cuatro conferencias por invitación; doce cursos cortos, y 26 ponencias por solicitud. El Comité Organizador agradece a todos los ponentes su interés por presentar trabajos de calidad en el evento; asimismo, agradece muy especialmente a todos los evaluadores, el cuidadoso y detallado arbitraje de las ponencias por solicitud recibidas. Finalmente, extendemos un especial reconocimiento a todos los compañeros que aportaron su invaluable colaboración a la organización de esta edición de la Semana: a los profesores y estudiantes del Departamento de Matemáticas, así como a todo el personal administrativo, quienes auxiliaron al Comité Organizador en las diversas tareas que un evento de este tipo requiere. Esperamos que lo publicado en estas memorias sea de utilidad y contribuya a que un mayor número de personas se acerquen a las matemáticas y se interesen por conocerlas, estudiarlas y aplicarlas en otras disciplinas.
Los Editores Marzo de 2006.
v
CONFERENCIA INAUGURAL
Teorema de Poincaré Dr. Pedro Miramontes Vidal Facultad de Ciencias, Universidad Nacional Autónoma de México
CONFERENCIAS PLENARIAS Topología de Singularidades Dr. José Luis Cisneros Molina Instituto de Matemáticas, Universidad Nacional Autónoma de México Estrategias jerárquicas de dos capas para calendarizar trabajos en una grid computacional Dr. Andrei Tchernykh Física Aplicada, Centro de Investigación Científica y de Educación Superior de Ensenada Resonancia paramétrica, inestabilidades, Sistemas Hamiltonianos, o cómo se mece un columpio Dr. Joaquín Delgado Fernandez Departamento de Matemáticas, Universidad Autónoma Metropolitana-Iztapalapa Dinámica Espacio-Temporal de relaciones mutualistas Dr. Faustino Sánchez Garduño Facultad de Ciencias, Universidad Nacional Autónoma de México Viernes 3 de marzo, 12:00 horas Auditorio del Departamento de Matemáticas
CONFERENCIAS POR INVITACION Búsqueda de recursos en ecosistemas complejos Dr. Octavio Miramontes Vidal Universidad Nacional Autónoma de México La aurora del conocimiento: descripción y contenido matemático de nuestro mural M.C. Ruperto Vargas Castro Universidad de Sonora El proceso de realización de exámenes departamentales M.C. Adrián Vázquez Osorio Universidad Autónoma de Baja California Convergencia de heurísticas de optimización para problemas multiobjetivo Dr. Mario Villalobos A. Universidad de Costa Rica
vi
CURSOS
Historia del concepto de número Dr. Alejandro R. Garciadiego Dantan Facultad de Ciencias, UNAM Patrones y Estructuras en Procesos Sociales: Una Introducción Matemática a los Sistemas Complejos Dr. José Luis Gutiérrez S. UACM
Introducción a calendarización y optimización de los recursos en sistemas paralelos y GRID computacional
Dr. Andrei Tchernykh CICESE
Emergencia de Estructuras ordenadas Dr. Faustino Sánchez G. Facultad de Ciencias, UNAM Control Estadístico de Procesos M.C. Román de la Vara (CIMAT) Introducción a las heurísticas de optimización Dr. Mario Villalobos Universidad de Costa Rica El uso del Cabrí en la Enseñanza de las Matemáticas M.C. Francisco López UACJ Introducción a los problemas inversos Dr. Joaquín Delgado Fernández Universidad Autónoma Metropolitana Topología Diferencial Dr. José Luis Cisneros Molina UNAM Desarrollo de aplicaciones en Internet M.C. Adrián Vázquez UABC El uso didáctico de la calculadora en la escuela primaria M.C. Maricela Armenta, M.C. Blanca Evelia Flores, M.C. Manuel A. Urrea Departamento de Matemáticas, Universidad de Sonora El uso didáctico del CAS en la enseñanza de las matemáticas en secundaria M.C. Enrique Hugues, M.C. José Ramón Jiménez, M.C. Ana Gpe. Del Castillo Departamento de Matemáticas, Universidad de Sonora
vii
PONENCIAS Ajuste a modelo no lineales sin el uso de computadoras Gabriel Guillén, Ana María Islas, Edith Guillén. Propiedades topológicas para bloques de Whitney Carlos Alberto Robles Corbalá.
Elementos contextuales que afectan el aprendizaje de matemáticas en ciencias sociales Jorge Rouquette Alvarado, Edith Ariza Gómez. Algunos problemas que implican derivada con Cabrí Mario Silvino Ávila Sandoval. Los mínimos cuadrados aplicados a los modelos de Vangheluwe y Zurek Ana María Islas, Manuel Olvera, Gabriel Guillén. Un ambiente gráfico para la normal y otras distribuciones relacionadas con ellaAdán Durazo Armenta, Enrique Hugues Galindo Transformaciones lineales con Cabrí Luis Macias, Héctor Portillo Lara, Carlos López. Las constantes numéricas de la ecuación de Mark Houwink Ana María Islas, Gabriel Guillén, Manuel Olvera. Un estudio de ondas estacionarias forzadas en un fluido de dos capas Inna Shingareva, Carlos Lizárraga Celaya, Horacio Valenzuela Martínez. El uso de las nuevas tecnologías en el nivel superior. una experiencia de un curso en red Francisco Javier Parra Bermúdez, Ramiro Ávila Godoy. Concepción de variable en textos, con profesores y estudiantes universitarios Lina Morales Peral, José Luis Díaz Gómez. Contribución al estudio de la curva de absorción de iodo en fibras sintéticas . Gabriel Guillén, Ana María Islas, Manuel Olvera, Laura E. Mercado. Estabilidad en modelos de mutualismo Mauricio Gil Gutiérrez. Seguimiento de alumnos de matemáticas inscritos en asignaturas del área de servicios; generación 1999-2 Ignacio Cruz Encinas, Francisco Armenta Aguilar.
Dificultades acerca de la enseñanza y aprendizaje del álgebra lineal Marcelino Dórame, Lina Morales Peral, José Luis Díaz Gómez. Procesos ¨Poisson, obtención de la función de distribución Poisson y sus aplicaciones Carlos Figueroa N., Martín Manosalvas.
viii

Una función continua en todas partes y diferenciable en ninguna Marysol Navarro Burruel. ¿Problemas de aplicación reales en matemáticas? José Luis Hernández González. Uso del programa Kmplot como herramienta de enseñanza del comportamiento gráfico de funciones matemáticas Jesús Eduardo Mora Ramírez, Juan De Dios Ocampo Díaz, Héctor Muñiz Valdez. Polinomios de Bernstein y algunas de sus aplicaciones Carlos Arturo Loredo Villalobos. Sistemas con incertidumbres en los parámetros de tipo segmento Baltasar Aguirre Hernández. Una herramienta audio-visual demostrativa del espectro de frecuencia de señales audibles en la enseñanza del análisis de fourier y sus aplicaciones. E. René Bastidas P., Maximiliano De Las Fuentes L., J. Álvaro Encinas Bringas El método de corrección de la capa límite para problemas con perturbaciones singulares Rodrigo González González. Sistemas controlables con un valor propio complejo Jorge A. López Rentaría, Martín E. Frías Armenta. Controles internos para garantizar un nivel mínimo de conocimientos Carlos Zubieta Badillo y Marissa R. Martínez Preece. Protein folding: an introduction Dora Julia Borbón González, Gareth J.Rylance, and Roy L. Johnston. Control de oscilaciones alrededor de la bifurcación k-cero Hopf Francisco Armando Carrillo N., Fernando Verduzco G. Diez años de cas en educación matemática: un recuento José Ramón Jiménez Rodríguez.
ix
CONTENIDO
Algunos problemas que implican derivada con Cabrí MARIO SILVINO ÁVILA SANDOVAL…..…………………………………………………….. 1
Controles internos para garantizar un nivel mínimo de conocimientos CARLOS ZUBIETA BADILLO, MARISSA R. MARTÍNEZ PREECE .......... ..……..…...…12
Sistemas con incertidumbres en los parámetros de tipo segmento BALTASAR AGUIRRE HERNANDEZ…................................................................................... .17
Plegado de proteínas: Una introducción DORA JULIA BORBÓN GONZÁLES, GARETH J. RYLANCE, ROY L. J. MARTÍN.............23 Control de oscilaciones alrededor de la bifurcación k-cero Hopf
FRANCISCO A. CARRILLO NAVARRO, FERNANDO VERDUZCO G...............................30
Una manera alternativa de calcular determinantes JOSÉ D. DÁVILA GALINDO …..........................................................................……………… 40
Estabilidad en modelos de mutualismo MAURICIO GIL GUTIÉRREZ………………........…………………………………………….. 47
El método de corrección de la capa límite para problemas con perturbaciones singulares
RODRIGO GONZÁLEZ GONZÁLEZ...........................................................................................52
Contribución al estudio de la curva de absorción de iodo en fibras sintéticas GABRIEL GUILLÉN, ANA MARÍA ISLAS, MANUEL OLVERA, LAURA E. MERCADO....62
Los mínimos cuadrados aplicados a los modelos de Vangheluwe y Zurek ANA MARÍA ISLAS, MANUEL OLVERA, GABRIEL GUILLÉN.............................................70
Sistemas controlables con un valor propio complejo JORGE A. RENTERÍA, MARTÍNE. FRÍAS ARMENTA.............................................................76
Polinomios de Bernstein y algunas de sus aplicaciones CARLOS ARTURO LOREDO VILLALOBOS.............................................................................85
Existencia de funciones continuas en todas partes y diferenciables en ninguna parte MARYSOL NAVARRO BURRUEL, GUADALUPE ÁVILA GODOY.......................................91
Propiedades topológicas para bloques de Whitney CARLOS ALBERTO ROBLES CORBALÁ..................................................................................98 Un estudio de ondas estacionarias forzadas en un fluido de dos capas INNA SHINGAREVA, CARLOS LIZÁRRAGA C., HORACIO VALENZUELA M..............107
x
ALGUNOS PROBLEMAS QUE IMPLICAN DERIVADA CON CABRÍ
M en C. Mario Silvino Ávila Sandoval
UNIVERSIDAD AUTÓNOMA DE CIUDAD JUÁREZ
INTRODUCCIÓN
Generalmente, cuando abordan situaciones de aprendizaje
elaboradas en CABRÍ, éstas son de orden geométrico, de graficación
de funciones, e incluso se han visto muy adecuadas
implementaciones del Álgebra Lineal. Sin embargo, este software,
dada su estructura, no posee una herramienta directa para derivar, lo
que ha limitado su uso en aplicaciones que involucren a la derivada
por ejemplo.
Por otra parte, por alguna razón, dentro de la enseñanza de las
Matemáticas se ha desarrollado un sentido de desdén a la solución de
problemas utilizando aproximaciones que nos pueden llevar de una
manera muy rápida a un muy buen acercamiento a la solución de
ciertos problemas.
Esta presentación tiene por objetivo utilizar el CABRÍ para plantear
y resolver algunos problemas que involucran a la derivada, por medio
de aproximaciones a la misma, y visualizar, que éstas, pueden ser
una alternativa de solución “rápida” de ciertos problemas donde
posiblemente, no sea de gran importancia una completa exactitud.
XVI Semana Regional de Investigacion y Docencia en Matematicas 1
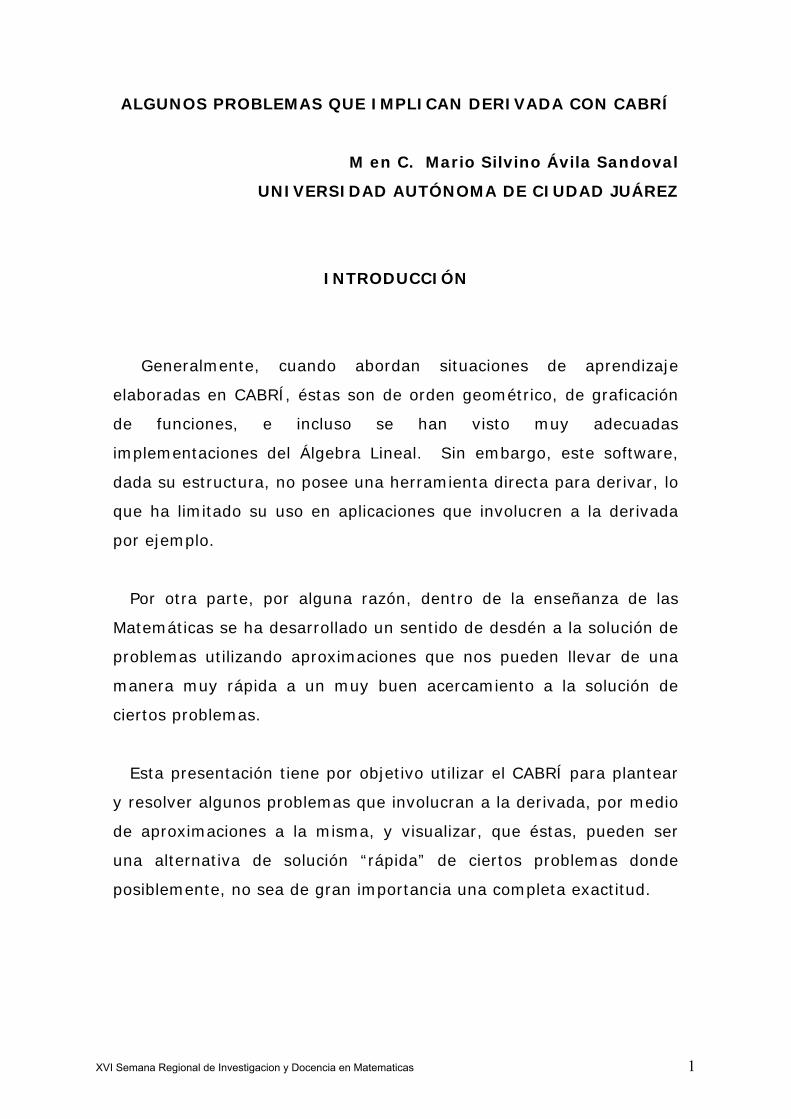
1.- LA REPRESENTACIÓN DE UNA FUNCIÓN EN CABRÍ
Iniciaremos utilizando a CABRÍ y su CALCULADORA para graficar
funciones. Hagamos aparecer el sistema coordenado, para después
poner en él un punto, al hacer que aparezcan sus coordenadas,
usaremos la entrada de la coordenada x como la variable
independiente de nuestra función ( Para nuestro ejemplo, usemos
f(x) = 0.3 x Senx ). Con la calculadora encontraremos la coordenada
y que transferiremos a una semirrecta dirigida hacia arriba,
perpendicular al eje x.
2 XVI Semana Regional de Investigacion y Docencia en Matematicas
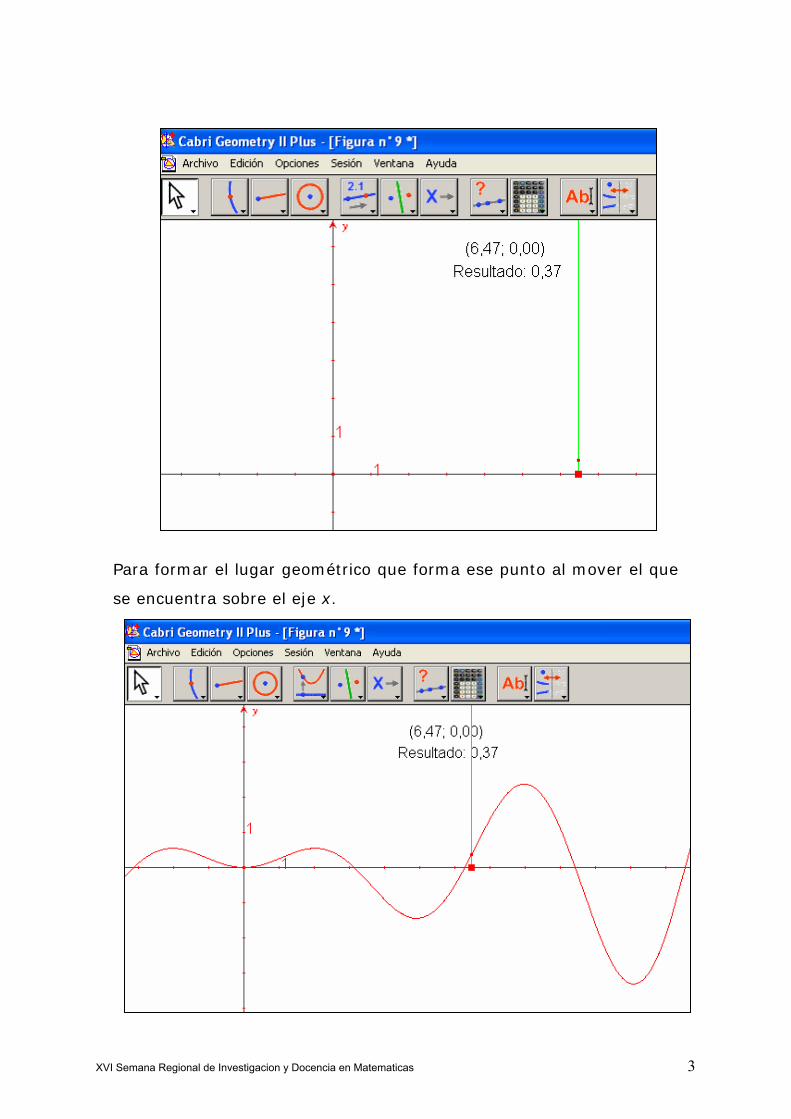
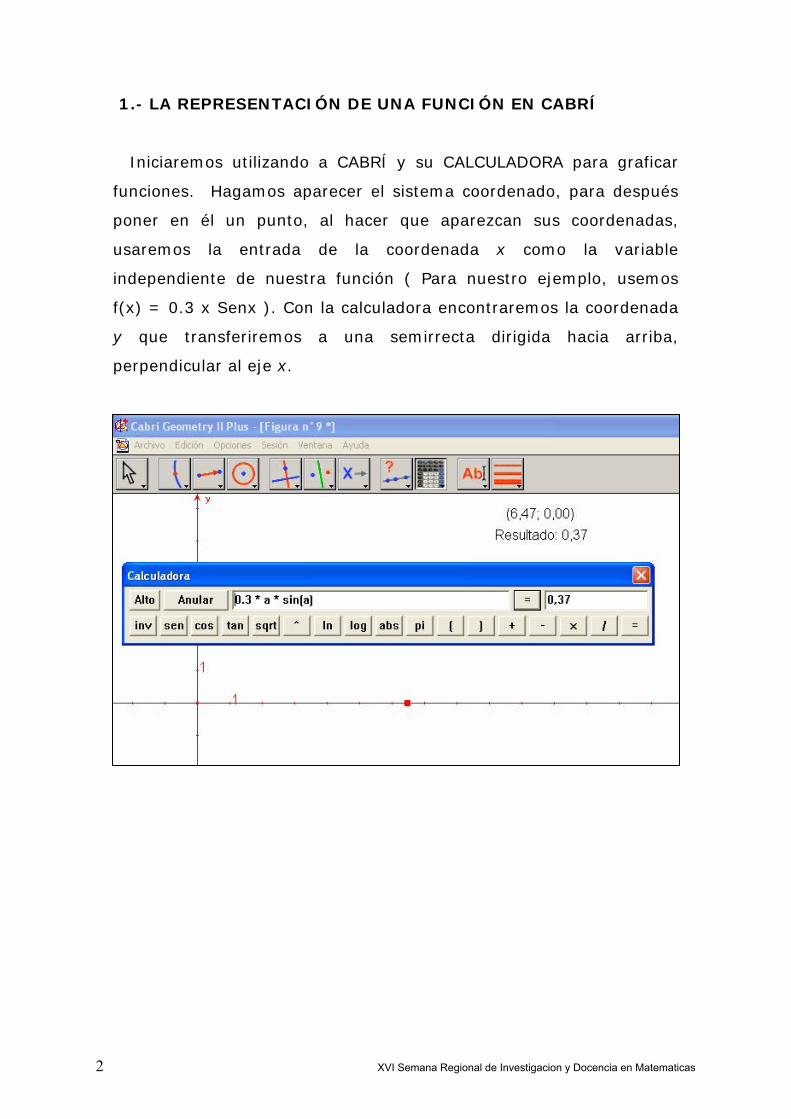
Para formar el lugar geométrico que forma ese punto al mover el que
se encuentra sobre el eje x.
XVI Semana Regional de Investigacion y Docencia en Matematicas 3
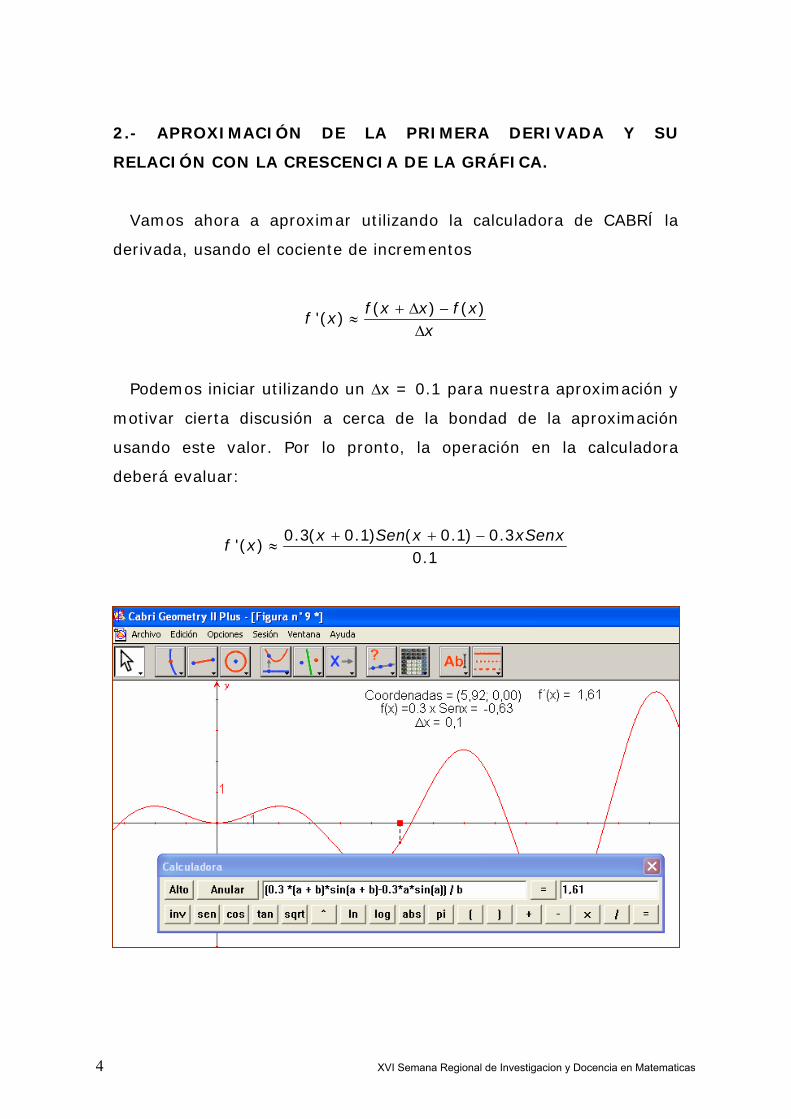
2.- APROXIMACIÓN DE LA PRIMERA DERIVADA Y SU
RELACIÓN CON LA CRESCENCIA DE LA GRÁFICA.
Vamos ahora a aproximar utilizando la calculadora de CABRÍ la
derivada, usando el cociente de incrementos
( ) ('( )
f x x f xf x
x+ ∆ −
≈∆
)
Podemos iniciar utilizando un ∆x = 0.1 para nuestra aproximación y
motivar cierta discusión a cerca de la bondad de la aproximación
usando este valor. Por lo pronto, la operación en la calculadora
deberá evaluar:
0.3( 0.1) ( 0.1) 0.3'( )
0.1x Sen x xSe
f x+ + −
≈nx
4 XVI Semana Regional de Investigacion y Docencia en Matematicas
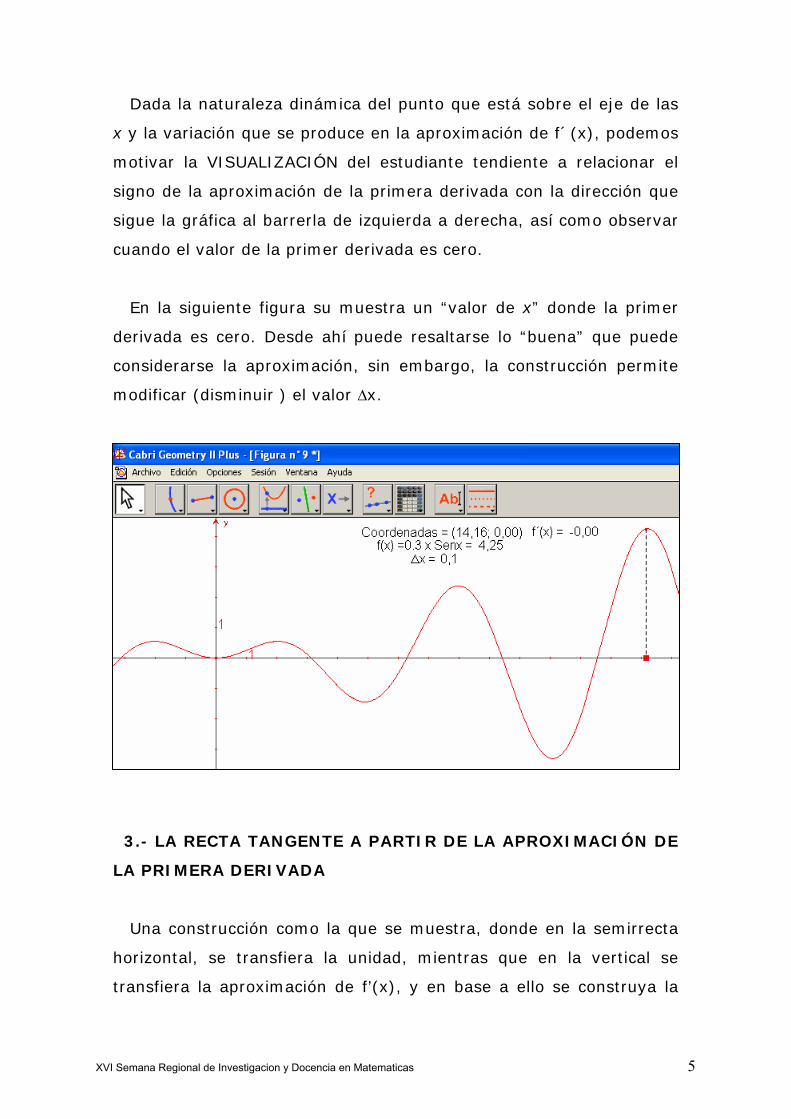
Dada la naturaleza dinámica del punto que está sobre el eje de las
x y la variación que se produce en la aproximación de f´(x), podemos
motivar la VISUALIZACIÓN del estudiante tendiente a relacionar el
signo de la aproximación de la primera derivada con la dirección que
sigue la gráfica al barrerla de izquierda a derecha, así como observar
cuando el valor de la primer derivada es cero.
En la siguiente figura su muestra un “valor de x” donde la primer
derivada es cero. Desde ahí puede resaltarse lo “buena” que puede
considerarse la aproximación, sin embargo, la construcción permite
modificar (disminuir ) el valor ∆x.
3.- LA RECTA TANGENTE A PARTIR DE LA APROXIMACIÓN DE
LA PRIMERA DERIVADA
Una construcción como la que se muestra, donde en la semirrecta
horizontal, se transfiera la unidad, mientras que en la vertical se
transfiera la aproximación de f’(x), y en base a ello se construya la
XVI Semana Regional de Investigacion y Docencia en Matematicas 5
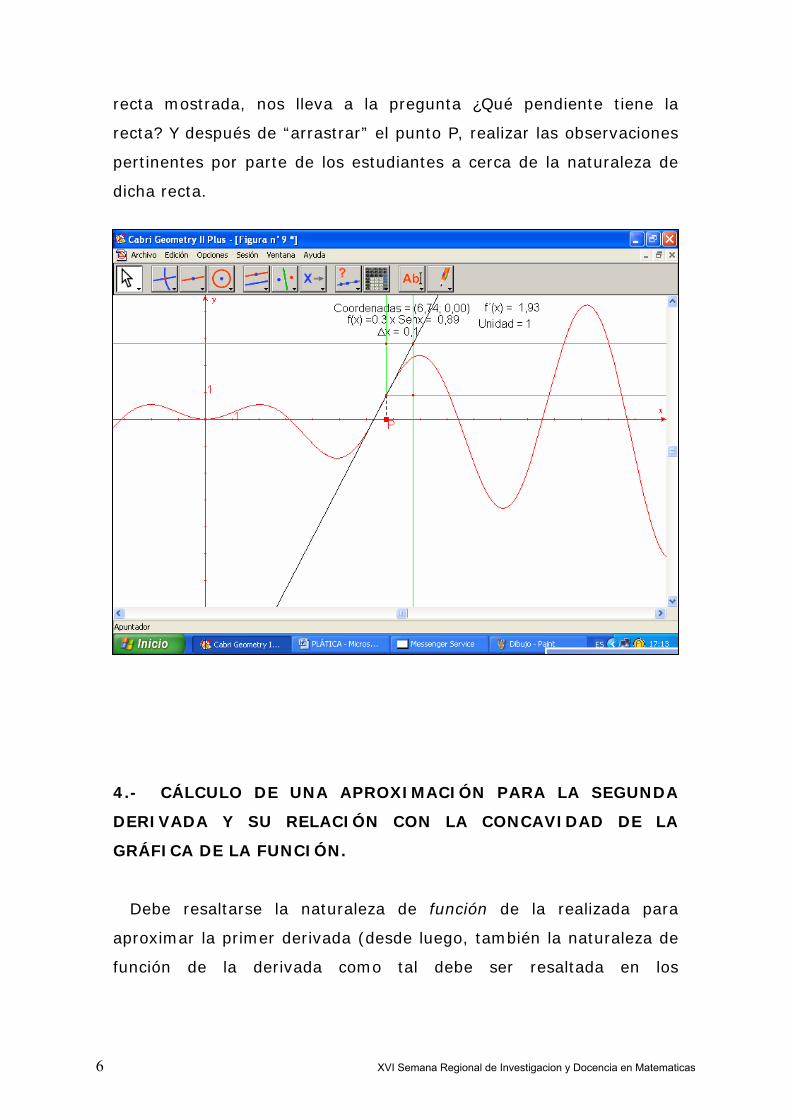
recta mostrada, nos lleva a la pregunta ¿Qué pendiente tiene la
recta? Y después de “arrastrar” el punto P, realizar las observaciones
pertinentes por parte de los estudiantes a cerca de la naturaleza de
dicha recta.
4.- CÁLCULO DE UNA APROXIMACIÓN PARA LA SEGUNDA
DERIVADA Y SU RELACIÓN CON LA CONCAVIDAD DE LA
GRÁFICA DE LA FUNCIÓN.
Debe resaltarse la naturaleza de función de la realizada para
aproximar la primer derivada (desde luego, también la naturaleza de
función de la derivada como tal debe ser resaltada en los
6 XVI Semana Regional de Investigacion y Docencia en Matematicas

estudiantes), y como tal, es susceptible también de evaluarse en sí
misma para obtener la aproximación de la segunda derivada:
( ) ('( )
f x x f xf x
x+ ∆ −
≈∆
)
Como la segunda derivada es la derivada de la derivada:
( )
( )2
'( ) '( )''( )
( ) ( ) ( ) (
''( )
( 2 ) 2 ( ) ( )''( )
f x h f xf x
x
f x x h f x x f x x f xx xf x
x
f x x f x x f xf x
x
+ −≈
∆
+ ∆ + − + ∆ + ∆ −−
∆ ∆≈∆
+ ∆ − + ∆ +≈
∆
)
Usando la calculadora, para nuestra función la operación que debe
desarrollarse para calcular la aproximación de la segunda derivada es
(usando el x dinámico y el ∆x editado que aparecen en pantalla:
( )20.3( 2 ) ( 2 ) 2(0.3)( ) ( ) (0.3)x x Sen x x x x Sen x x xSenx
x
+ ∆ + ∆ − + ∆ + ∆ +
∆
XVI Semana Regional de Investigacion y Docencia en Matematicas 7

Nuevamente, dada la movilidad de P, los estudiantes podrán
relacionar el valor de la segunda derivada (aproximada) con la
concavidad de la función, y el significado geométrico del valor de cero
para la segunda derivada; e incluso, establecer el criterio de la
segunda derivada para los máximos y mínimos.
5.- UNA APLICACIÓN: EL CÍRCULO OSCULATORIO DE LA
GRÁFICA DE UNA FUNCIÓN Y LA EVOLUTA DE UNA GRÁFICA.
El radio de curvatura de una función en un punto determinado, es el
radio de una circunferencia que es tangente al punto de la gráfica de
la función, y éste queda determinado por la expresión
8 XVI Semana Regional de Investigacion y Docencia en Matematicas
( )[ ])´´()´(1)(
23
2
xfxfxr +
=
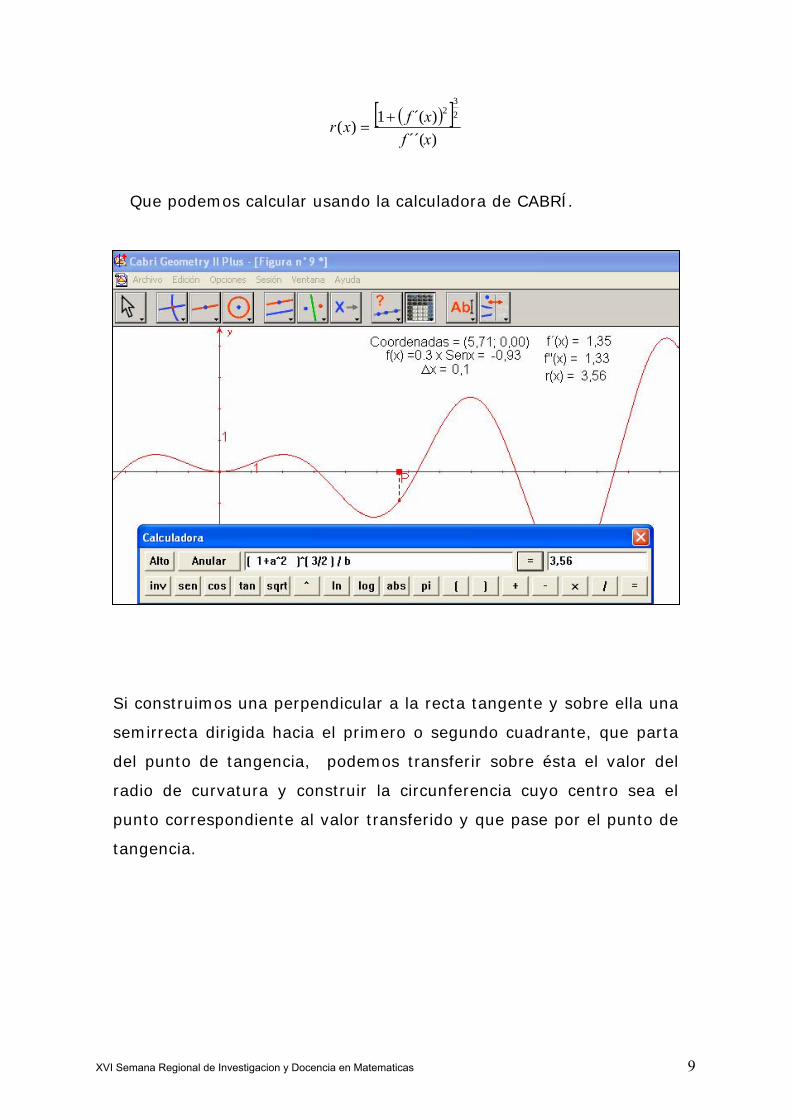
Que podemos calcular usando la calculadora de CABRÍ.
Si construimos una perpendicular a la recta tangente y sobre ella una
semirrecta dirigida hacia el primero o segundo cuadrante, que parta
del punto de tangencia, podemos transferir sobre ésta el valor del
radio de curvatura y construir la circunferencia cuyo centro sea el
punto correspondiente al valor transferido y que pase por el punto de
tangencia.
XVI Semana Regional de Investigacion y Docencia en Matematicas 9

10 XVI Semana Regional de Investigacion y Docencia en Matematicas
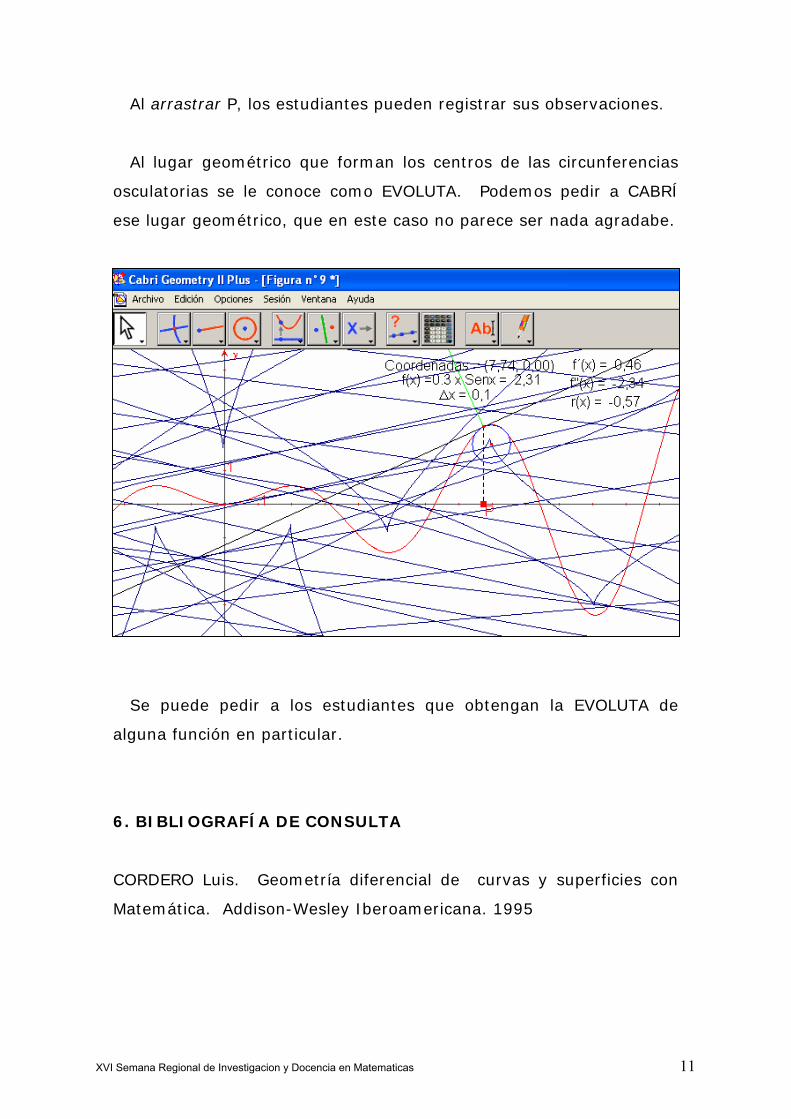
Al arrastrar P, los estudiantes pueden registrar sus observaciones.
Al lugar geométrico que forman los centros de las circunferencias
osculatorias se le conoce como EVOLUTA. Podemos pedir a CABRÍ
ese lugar geométrico, que en este caso no parece ser nada agradabe.
Se puede pedir a los estudiantes que obtengan la EVOLUTA de
alguna función en particular.
6. BIBLIOGRAFÍA DE CONSULTA
CORDERO Luis. Geometría diferencial de curvas y superficies con
Matemática. Addison-Wesley Iberoamericana. 1995
XVI Semana Regional de Investigacion y Docencia en Matematicas 11
Controles internos para garantizar un nivel mínimo de conocimientos
Carlos Zubieta Badillo y Marissa R. Martínez Preece
Universidad Autónoma Metropolitana, Unidad Azcapotzalco
I. Introducción Los estudiantes que son admitidos en alguna institución de educación superior generalmente son elegidos mediante un examen de admisión o de selección que pretende escoger a los mejores aspirantes. Sin embargo, este tipo de instrumentos, en la mayoría de los casos, no garantizan que esos estudiantes tengan los conocimientos mínimos necesarios o los mínimos deseables para iniciar sus estudios profesionales. Es más, se reconoce, que la mayoría de dichos estudiantes ingresan al nivel superior con una preparación deficiente, principalmente respecto a conocimientos, habilidades y competencias matemáticas básicas y de lecto-escritura. Muchos estudiantes logran ingresar a instituciones de nivel superior bajo el abrigo de las políticas educativas vigentes, que tratan de evitar la deserción escolar acreditando alumnos que logran asistir regularmente a la escuela, sin que se tenga una clara evidencia de los conocimientos adquiridos. La falta de responsabilidad directa en el sistema educativo, hace crisis cuando estos estudiantes ingresan a escuelas de nivel superior, pues resulta que es aquí en donde se les exige que demuestren su competencia en quehaceres fundamentales como leer, escribir y realizar operaciones matemáticas básicas. Si bien es cierto que, es de primordial importancia mantener bajo control el problema de la deserción escolar, también es cierto que es fundamental, para el sano desarrollo del país, alcanzar niveles aceptables de preparación en los egresados de las instituciones de educación superior, y en especial en las escuelas públicas ya que de éstas egresan la mayoría de los profesionistas del país. Entonces, ¿porqué no crear controles internos que garanticen un nivel mínimo de conocimientos en cada nivel educativo? Nuestra exposición versa alrededor de la idea que las universidades deben ser responsables de los conocimientos que adquieren sus estudiantes, y por lo tanto deben prestar especial atención a aquellos conocimientos que resultan fundamentales para sustentar niveles superiores de aprendizaje, ya que para un número importante de egresados, la inserción en el aparato productivo dependerá de su preparación académica y de las habilidades adquiridas durante su formación profesional. El trabajo aquí presentado constituye el segundo reporte del proyecto de investigación: Situación actual y perspectivas del aprendizaje de las matemáticas en la carrera de Administración en la UAM Azcapotzalco. Este proyecto de investigación tiene como objetivos determinar la existencia de deficiencias en los conocimientos matemáticos básicos que manejan los alumnos de la licenciatura de administración, y, de ser el caso, definir su magnitud de tal forma que se puedan proponer estrategias para mejorar el proceso de
12 XVI Semana Regional de Investigacion y Docencia en Matematicas

Nivel Medio Superior y Superior
enseñanza aprendizaje de las matemáticas, considerando los recursos con que cuentan los alumnos. Este documento se dividió en cuatro partes, de las cuales las tres primeras corresponden a las diferentes etapas del proyecto de investigación, a saber:
• Estudio de corte transversal: incluyó un examen diagnóstico de conocimientos matemáticos básicos y un cuestionario sociocultural.
• Estudio de corte longitudinal: Se realizaron exámenes de seguimiento a los alumnos que aprobaron los primeros cursos básicos de matemáticas.
• Diagnóstico de conocimientos matemáticos básicos para alumnos de nuevo ingreso: se examinaron alumnos inscritos en seis períodos de admisión.
• Conclusiones II. Estudio de corte transversal El estudio de corte transversal se realizó en el trimestre que inició en mayo del 2002 a 370 alumnos que se encontraban estudiando cursos de matemáticas a lo largo de la carrera de administración. Después de depurar la base sólo se consideraron 330 casos para los resultados del examen diagnóstico. Los temas incluidos en el examen diagnóstico se diseñaron tomando en consideración los conocimientos matemáticos básicos que deberían de tener los estudiantes y el área de conocimiento en que los aplicarían. Los reactivos se elaboraron después de analizar los programas de estudio de las principales instituciones de educación media superior del país, de donde proceden la mayoría de los alumnos de nuevo ingreso, a saber: la Escuela Nacional Preparatoria, el Colegio de Bachilleres, el Colegio de Ciencias y Humanidades, los CECyT’S, CBTI’s, principalmente. Asimismo, se consideró que para estudiar la carrera de administración, se necesitaría medir ciertos conceptos básicos de:
a) aritmética (fracciones y sus operaciones), b) álgebra (operaciones con polinomios, productos notables, factorización y solución
de ecuaciones) c) estadística (cálculos básicos)
Se evitó considerar aspectos teóricos y se dio prioridad a los aspectos prácticos (algoritmos y habilidad para resolver problemas sencillos). En total, el examen se integró con 24 preguntas, distribuidas de la siguiente manera:
a) 8 preguntas de aritmética, b) 5 preguntas de operaciones algebraicas c) 7 preguntas sobre solución de ecuaciones, y d) 4 preguntas de estadística
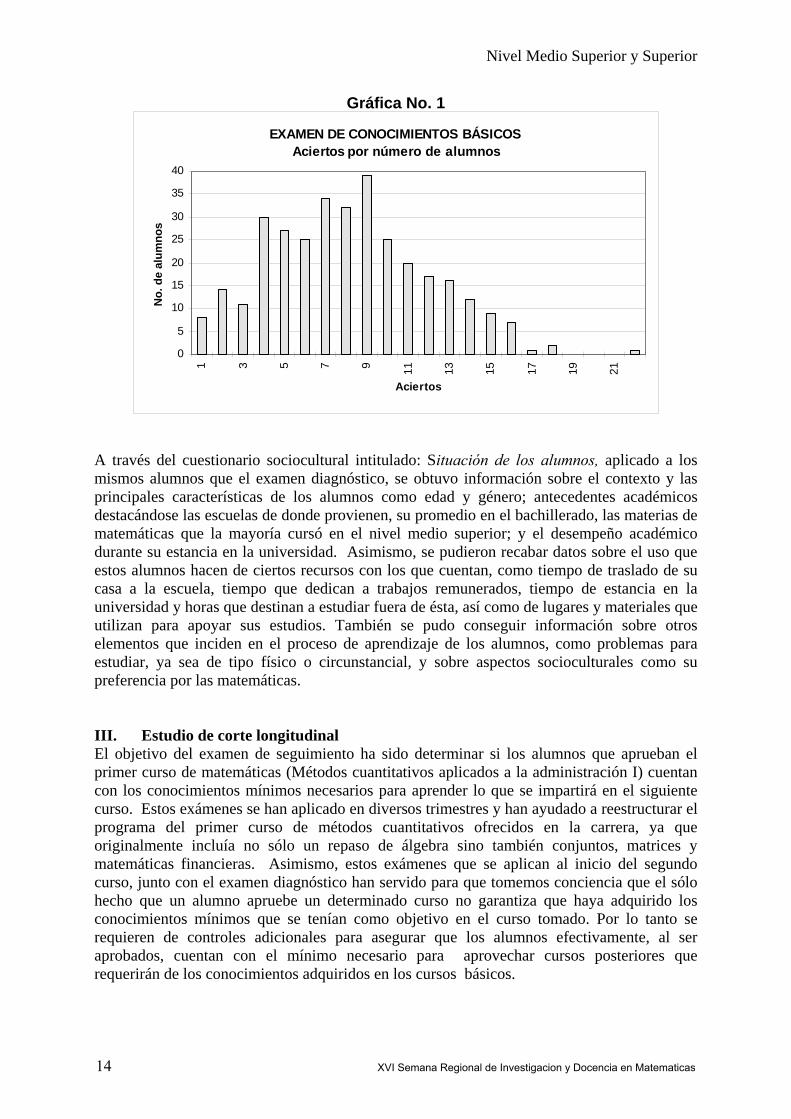
En la gráfica No. 1 se muestran los resultados obtenidos, con un promedio de 9 aciertos de los 24 posibles.
XVI Semana Regional de Investigacion y Docencia en Matematicas 13
Nivel Medio Superior y Superior
Gráfica No. 1
EXAMEN DE CONOCIMIENTOS BÁSICOSAciertos por número de alumnos
0
5
10
15
20
25
30
35
40
1 3 5 7 9 11 13 15 17 19 21
Aciertos
No.
de
alum
nos
A través del cuestionario sociocultural intitulado: Situación de los alumnos, aplicado a los mismos alumnos que el examen diagnóstico, se obtuvo información sobre el contexto y las principales características de los alumnos como edad y género; antecedentes académicos destacándose las escuelas de donde provienen, su promedio en el bachillerado, las materias de matemáticas que la mayoría cursó en el nivel medio superior; y el desempeño académico durante su estancia en la universidad. Asimismo, se pudieron recabar datos sobre el uso que estos alumnos hacen de ciertos recursos con los que cuentan, como tiempo de traslado de su casa a la escuela, tiempo que dedican a trabajos remunerados, tiempo de estancia en la universidad y horas que destinan a estudiar fuera de ésta, así como de lugares y materiales que utilizan para apoyar sus estudios. También se pudo conseguir información sobre otros elementos que inciden en el proceso de aprendizaje de los alumnos, como problemas para estudiar, ya sea de tipo físico o circunstancial, y sobre aspectos socioculturales como su preferencia por las matemáticas. III. Estudio de corte longitudinal El objetivo del examen de seguimiento ha sido determinar si los alumnos que aprueban el primer curso de matemáticas (Métodos cuantitativos aplicados a la administración I) cuentan con los conocimientos mínimos necesarios para aprender lo que se impartirá en el siguiente curso. Estos exámenes se han aplicado en diversos trimestres y han ayudado a reestructurar el programa del primer curso de métodos cuantitativos ofrecidos en la carrera, ya que originalmente incluía no sólo un repaso de álgebra sino también conjuntos, matrices y matemáticas financieras. Asimismo, estos exámenes que se aplican al inicio del segundo curso, junto con el examen diagnóstico han servido para que tomemos conciencia que el sólo hecho que un alumno apruebe un determinado curso no garantiza que haya adquirido los conocimientos mínimos que se tenían como objetivo en el curso tomado. Por lo tanto se requieren de controles adicionales para asegurar que los alumnos efectivamente, al ser aprobados, cuentan con el mínimo necesario para aprovechar cursos posteriores que requerirán de los conocimientos adquiridos en los cursos básicos.
14 XVI Semana Regional de Investigacion y Docencia en Matematicas
Nivel Medio Superior y Superior
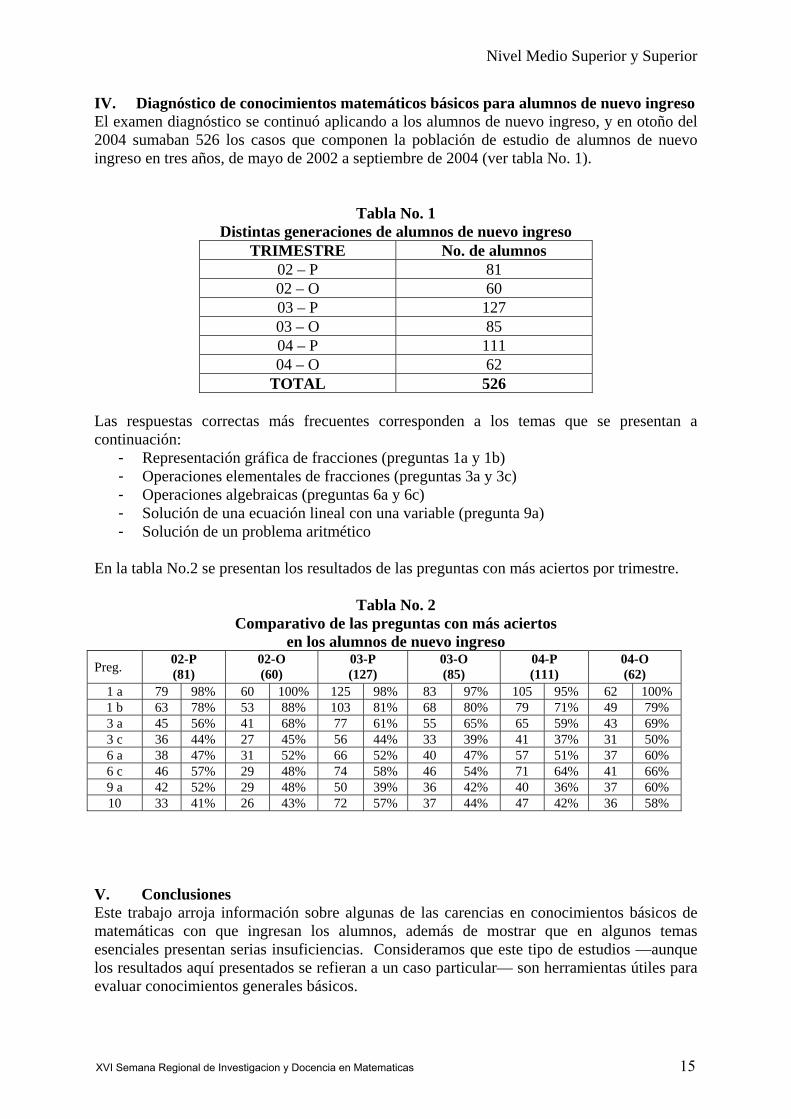
IV. Diagnóstico de conocimientos matemáticos básicos para alumnos de nuevo ingreso El examen diagnóstico se continuó aplicando a los alumnos de nuevo ingreso, y en otoño del 2004 sumaban 526 los casos que componen la población de estudio de alumnos de nuevo ingreso en tres años, de mayo de 2002 a septiembre de 2004 (ver tabla No. 1).
Tabla No. 1 Distintas generaciones de alumnos de nuevo ingreso
TRIMESTRE No. de alumnos 02 – P 81 02 – O 60 03 – P 127 03 – O 85 04 – P 111 04 – O 62
TOTAL 526 Las respuestas correctas más frecuentes corresponden a los temas que se presentan a continuación:
- Representación gráfica de fracciones (preguntas 1a y 1b) - Operaciones elementales de fracciones (preguntas 3a y 3c) - Operaciones algebraicas (preguntas 6a y 6c) - Solución de una ecuación lineal con una variable (pregunta 9a) - Solución de un problema aritmético
En la tabla No.2 se presentan los resultados de las preguntas con más aciertos por trimestre.
Tabla No. 2
Comparativo de las preguntas con más aciertos en los alumnos de nuevo ingreso
Preg. 02-P (81)
02-O (60)
03-P (127)
03-O (85)
04-P (111)
04-O (62)
1 a 79 98% 60 100% 125 98% 83 97% 105 95% 62 100% 1 b 63 78% 53 88% 103 81% 68 80% 79 71% 49 79% 3 a 45 56% 41 68% 77 61% 55 65% 65 59% 43 69% 3 c 36 44% 27 45% 56 44% 33 39% 41 37% 31 50% 6 a 38 47% 31 52% 66 52% 40 47% 57 51% 37 60% 6 c 46 57% 29 48% 74 58% 46 54% 71 64% 41 66% 9 a 42 52% 29 48% 50 39% 36 42% 40 36% 37 60% 10 33 41% 26 43% 72 57% 37 44% 47 42% 36 58%
V. Conclusiones Este trabajo arroja información sobre algunas de las carencias en conocimientos básicos de matemáticas con que ingresan los alumnos, además de mostrar que en algunos temas esenciales presentan serias insuficiencias. Consideramos que este tipo de estudios —aunque los resultados aquí presentados se refieran a un caso particular— son herramientas útiles para evaluar conocimientos generales básicos.
XVI Semana Regional de Investigacion y Docencia en Matematicas 15
Nivel Medio Superior y Superior
En el estudio de corte transversal, se pudo observar que si no se actúa para remediar dichas carencias éstas subsistirán durante toda la carrera, a pesar de que se tomen cursos con aplicaciones cuantitativas que suponen cierta destreza en el uso de conocimientos fundamentales. Por otra parte, el cuestionario sobre la situación de los alumnos, ofreció un panorama general de algunas características de los estudiantes de administración a mediados del 2002, y de los recursos con que contaban y su uso. La información general aquí obtenida y que pudiera compararse con datos recabados por otros estudios más recientes realizados en la UAM-A coincide en un alto grado. Los resultados obtenidos en este estudio indican que la aplicación sistemática de herramientas de seguimiento servirán para detectar a tiempo insuficiencias, evitando que cursos claves para la educación de los estudiantes se tornen informativos, abandonando su naturaleza formativa y por tanto dejando de cumplir con el principal objetivo de la educación superior. Por último se puede concluir que si se cuenta con un examen diagnóstico que evidencie las deficiencias de los alumnos de nuevo ingreso y además se realizan, de manera sistemática, estudios de corte transversal y de corte longitudinal a lo largo de la carrera, se contará con controles que sirvan para garantizar que los alumnos manejan los conocimientos requeridos y que han desarrollado las habilidades necesarias para graduarse.
Referencias bibliográficas Coordinación General de Planeación, Coplan (2001), 22 Estudios de Seguimiento de Egresados 1994 y 1999 de
la UAM-Azcapotzalco, Universidad Autónoma Metropolitana Coordinación General de Planeación, Coplan (2005), Estudios de Seguimiento de Egresados 1997 y 2002 de la
UAM-Azcapotzalco, Universidad Autónoma Metropolitana. (Versión preliminar). De Garay, Adrián (2004). Características socioeconómicas, hábitos de estudio y prácticas de consumo cultural
de los alumnos de nuevo ingreso, trimestre 03P. UAM- Azcapotzalco. Universidad Autónoma Metropolitana
Zubieta, Carlos et. Al. (2003) Competencia al resolver problemas matemáticos básicos. El caso de los
estudiantes de la carrera de administración. Reporte de investigación No. 447. Departamento de Ciencias Básicas, UAM Azcapotzalco, Universidad Autónoma Metropolitana.
16 XVI Semana Regional de Investigacion y Docencia en Matematicas

Nivel Superior
Sistemas con Incertidumbres en los Parametros de tipo Segmento
Baltazar Aguirre
Universidad Autonoma Metropolitana.
Departamento de Matematicas.
Av. San Rafael Atlixco # 186
Col. Vicentina. 09340 Mexico D. F
Resumen
Dado el sitema lineal x = Ax, la estabilidad en el origen esta determinada porel polinomio caracteristico de A, al que denotamos como p(t): si todas las raices dep(t) tienen parte real negativa (p(t) es polinomio Hurwitz) entonces el origen seraasintoticamente estable. Cuando el sistema es resultado de modelar algun problemafısico, en general, no se tiene completa seguridad sobre los valores de las entradas deA, por lo que es mas conveniente pensar que A pertenece a una familia de matrices ypor lo tanto p(t) tambien pertenecera a una familia de polinomios. Entre las familiasde polinomios de mas interes estan las de tipo segmento, es decir cuando la familiaes un rayo de polinomios o cuando son las combinaciones convexas de 2 polinomios,etc. Presentaremos algunos de los resultados mas importantes acerca de estas familiasy algunos problemas relacionados con ellas.
1 FAMILIAS DE SISTEMAS Y POLINOMIOS
Considerar el sistemax = Ax
Si todos los valores propios de la matriz A tienen parte real negativa entonces todas lassoluciones del sistema convergen al origen cuando t → ∞. Una matriz con la propiedad deque sus valores propios tienen parte real negativa se dice que es una matriz Hurwitz. PA(t) =polinomio caracterıstico de la matriz A.
Definicion 1.1. Un polinomio con coeficientes reales f(t) = b0tn + b1t
n−1 + ... + bn−1t + bn
es Hurwitz si todas sus raices tienen parte real negativa.
Por otra parte, cuando estudiamos un problema fisico y lo modelamos sabemos queel modelo es una proximacion y no estamos completamente seguros de los valores de losparametros que intervienen, por lo que es mas conveniente pensar que la matriz A pertenecea una familia: A ∈ F . Y por lo tanto tambien el polinomio caracterıstico pertenece a unafamilia de polinomios: PA(t) ∈ P .Entre las familias mas estudiadas estan las de tipo segmento. Para entender esto necesitamosver al conjunto de polinomios como conjunto de puntos.
1
XVI Semana Regional de Investigacion y Docencia en Matematicas 17

2 GEOMETRIA DE LOS POLINOMIOS HURWITZ
Notacion. Denotamos por Pn al conjunto de polinomios de coeficientes reales de grado ≤ n.Identificamos al polinomio f(t) = b0t
n +b1tn−1 + ...+bn con el vector en Rn+1 : (b0, b1, ..., bn).
De esta manera, podemos hablar de una topologia de Pn.Denotamos por Hn al conjunto de los polinomios Hurwitz de grado n.
3 SEGMENTOS DE POLINOMIOS
De acuerdo a la interpretacion geometrica anterior el segmento de polinomios determinadopor los polinomios P0(t) y P1(t) esta formado por las combinaciones convexas λP0(t) + (1−λ)P1(t), λ ∈ [0, 1]
Problema 3.1. Dados P0(t) y P1(t) Hurwitz ¿λP0(t) + (1− λ)P1(t) es Hurwitz ∀λ ∈ [0, 1]?
La respuesta no siempre es afirmativa, como podemos ilustrarlo enseguida.
Ejemplo 3.2. P0(t) = t3 + 6t2 + 11t + 6 = (t + 1)(t + 2)(t + 3), P1(t) = 6t2 + 5t + 216 esHurwitz , sin embargo λP0(t) + (1−λ)P1(t) = λ(t3 + 6t2 + 11t + 6t) + (1−λ)(6t2 + 5t + 216)no es Hurwitz para todo λ ≥ 0
a) para λ ∈[0, 5−
√2
7
)es Hurwitz
b) para λ ∈[
5−√
27
, 5+√
27
]no es Hurwitz
c) para λ ∈(
5+√
27
, 1]
es Hurwitz
4 CRITERIOS PARA LA ESTABILIDAD DE SEGMENTOS
Entre los resultados existentes que estudian el problema de determinar si un segmento depolinomios es estable o no podemos destacar los siguientes:1) El Teorema de Bialas2) El Lema del Segmento3) Las condiciones de Rantzer
5 RAYOS Y CONOS DE POLINOMIOS
Problema 5.1. Dado P0(t) Hurwitz , ¿que polinomios P (t) cumplen que P0(t) + λP (t) esHurwitz ∀λ ≥ 0?
Ejemplo 5.2. P0(t) = t3 + 6t2 + 11t + 6, P (t) = 6t2 + 5t + 216 es Hurwitz , sin embargoP0(t) + λP (t) = t3 + 6t2 + 11t + 6t + λ(6t2 + 5t + 216) no es Hurwitz ∀λ ≥ 0
a) para λ ∈ [0, 2−√
2) es Hurwitzb) para λ ∈ [2−
√2, 2 +
√2] no es Hurwitz
c) para λ ∈ (2 +√
2,∞) es Hurwitz
Ejemplo 5.3. p0(t) = t3 + 6t2 + 11t + 6 y p(t) = 5t2 + 11t + 6.5p0(t) + λp(t) = t3 + 6t2 + 11t + 6t + λ(5t2 + 11t + 6.5) es Hurwitz para todo λ ≥ 0.
2
18 XVI Semana Regional de Investigacion y Docencia en Matematicas
6 RELACION ENTRE RAYOS Y SEGMENTOS DE POLINOMIOS
Si p0(t) + kp1(t) es Hurwitz para todo k ≥ 0 entonces(
11+k
)p0(t) +
(k
1+k
)p1(t) es Hurwitz
para todo k ≥ 0, de donde si p1 es Hurwitz se tiene que la estabilidad del rayo p0(t) + kp1(t)es equivalente a la estabilidad del segmento [p0(t), p1(t)] .
Un analisis en terminos de rayos de polinomios fue hecho en [1]
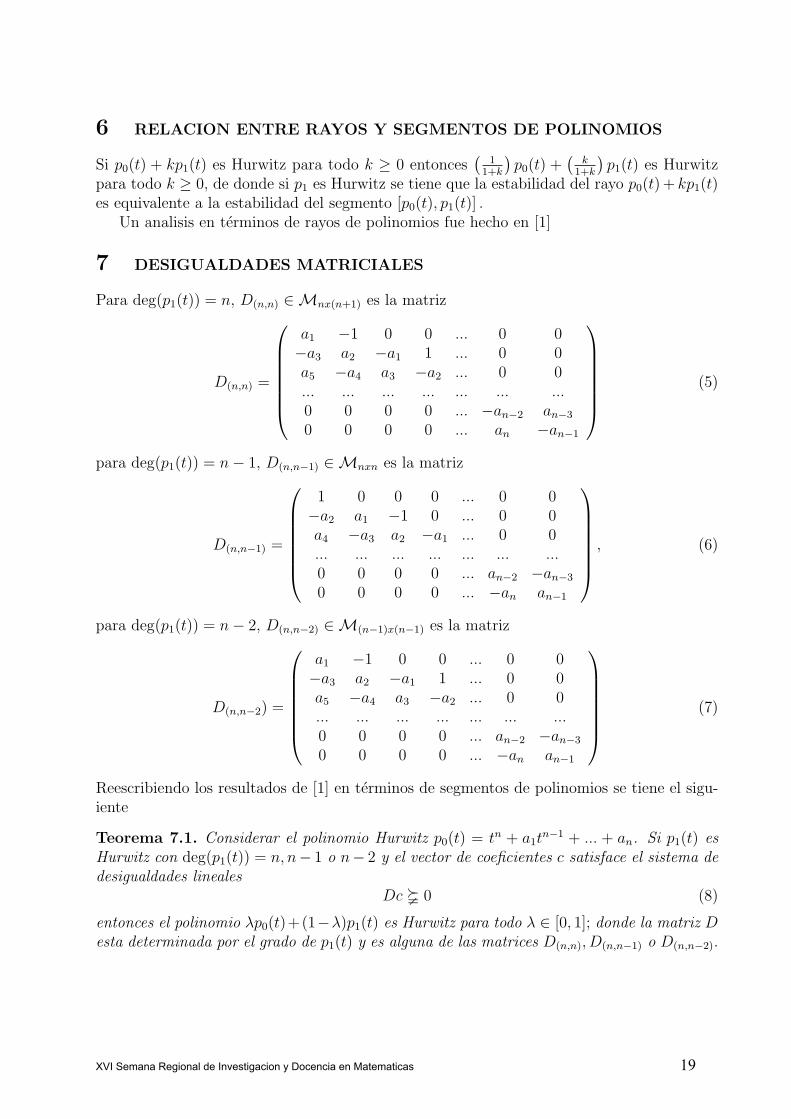
7 DESIGUALDADES MATRICIALES
Para deg(p1(t)) = n, D(n,n) ∈Mnx(n+1) es la matriz
D(n,n) =
a1 −1 0 0 ... 0 0−a3 a2 −a1 1 ... 0 0a5 −a4 a3 −a2 ... 0 0... ... ... ... ... ... ...0 0 0 0 ... −an−2 an−3
0 0 0 0 ... an −an−1
(5)
para deg(p1(t)) = n− 1, D(n,n−1) ∈Mnxn es la matriz
D(n,n−1) =
1 0 0 0 ... 0 0−a2 a1 −1 0 ... 0 0a4 −a3 a2 −a1 ... 0 0... ... ... ... ... ... ...0 0 0 0 ... an−2 −an−3
0 0 0 0 ... −an an−1
, (6)
para deg(p1(t)) = n− 2, D(n,n−2) ∈M(n−1)x(n−1) es la matriz
D(n,n−2) =
a1 −1 0 0 ... 0 0−a3 a2 −a1 1 ... 0 0a5 −a4 a3 −a2 ... 0 0... ... ... ... ... ... ...0 0 0 0 ... an−2 −an−3
0 0 0 0 ... −an an−1
(7)
Reescribiendo los resultados de [1] en terminos de segmentos de polinomios se tiene el sigu-iente
Teorema 7.1. Considerar el polinomio Hurwitz p0(t) = tn + a1tn−1 + ... + an. Si p1(t) es
Hurwitz con deg(p1(t)) = n, n− 1 o n− 2 y el vector de coeficientes c satisface el sistema dedesigualdades lineales
Dc 0 (8)
entonces el polinomio λp0(t)+(1−λ)p1(t) es Hurwitz para todo λ ∈ [0, 1]; donde la matriz Desta determinada por el grado de p1(t) y es alguna de las matrices D(n,n), D(n,n−1) o D(n,n−2).
3
XVI Semana Regional de Investigacion y Docencia en Matematicas 19

8 MINIMO EXTREMO IZQUIERDO Y MAXIMO EXTREMO DERECHO
Sea p0(t) un polinomio Hurwitz. Considerar la familia de polinomios
p(t) = p0(t) + kp1(t) (1)
donde k es un numero real y p1(t) es un polinomio cuyo grado es menor que el grado dep0(t). ¿Existiran kmin < 0 y kmax > 0 tal que p0(t) + kp1(t) es Hurwitz ∀k ∈ (kmin, kmax)?En tal caso decimos que (kmin, kmax) es el intervalo maximo de estabilidad. Si deg p0 > deg p1
kmin =1
λ−min[−H−1(p0)H(p1)](2)
kmax =1
λ+max[−H−1(p0)H(p1)]
(3)
donde H(p0), H(p1) son las matrices de Hurwitz de p0 y p1 respectivamente yλ−min[−H−1(p0)H(p1)] es el mınimo valor propio negativo de la matriz −H−1(p0)H(p1).λ+
max[−H−1(p0)H(p1)] es el maximo valor propio positivo de la matriz −H−1(p0)H(p1). Si nohay se definen λ−min[−H−1(p0)H(p1)] = 0−, λ+
max[−H−1(p0)H(p1)] = 0+
9 TECNICA DE ESTIMACION PROPUESTA
Dado el polinomio p0(t) = tn + a1tn−1 + ... + an definimos la matriz.
Z(n,n−1) =
a1 −2 0 0 ... 0 00 a2 −2a1 2 ... 0 00 0 a3 −2a2 ... 0 0... ... ... ... ... ... ...0 0 0 0 ... an−1 −2an−2
0 0 0 0 ... 0 an
(4)
y sea Zi(n,n−1) el i-esimo renglon de la matriz Z(n.n−1) y a = (a1, a2, ..., an)T .
Teorema 9.1. Sea p0(t) = tn+a1tn−1+ ...+an un polinomio Hurwitz y sea E(n,n−1) la matriz
definida anteriormente. Si el vector c = (c1, c2, ..., cn)T 0 es una solucion al sistema dedesigualdades E(n,n−1)c 0 y p1(t) =
∑ni=1 cit
n−i, entonces p0(t)+kp1(t) es Hurwitz ∀k > k0,
donde k0 = maxi=1,...,n
(−
Zi(n,n−1)
a
Ei(n,n−1)
c
), es decir kmin ≤ k0.
Ejemplo 9.2. Dados p0(t) = t3 + 7t2 + 14t + 8 y p1(t) = t2 + 4t + 6
Z(3,2)a =
7 −2 00 14 −140 0 8
7148
=
218464
4
20 XVI Semana Regional de Investigacion y Docencia en Matematicas

E(3,2)c =
7 −1 0−8 14 −70 0 8
146
=
3648
k0 = max
(−21
3,−84
6,−64
48
)= −4
3
H(p0) =
7 8 01 14 00 7 8
, H(p1) =
1 6 00 4 00 1 6
, H−1(p0)H(p1) =
745
2645
0− 1
901145
07
720− 4
4534
σ (−H−1(p0)H(p1)) = −3
4,−1
5± 1
15i y λmin = −3
4, kmin = −4
3
Entonces en este ejemplo los dos enfoques conducen a que p0(t)+kp1(t) es Hurwitz ∀k > −43.
Ejemplo 9.3. p0(t) = t3 + 7t2 + 14t + 8, p1(t) = 26t2 + 137t + 90
Z(3,2)a =
7 −2 00 14 −140 0 8
7148
=
218464
E(3,2)c =
7 −1 0−8 14 −70 0 8
2613790
=
451080720
k0 = max
(−21
45,− 84
1080,− 64
720
)= − 7
90= −0.07778
H(p0) =
7 8 01 14 00 7 8
, H(p1) =
26 90 00 137 00 26 90
H−1(p0)H(p1) =
18245
8245
0−13
4586990
091360
−3743720
454
σ (−H−1(p0)H(p1)) = −11.25,−4.1399,−9.5601 y λmin = −11.25, kmin = −0.088889
Entonces en este ejemplo con nuestro enfoque obtenemos que p0(t)+ kp1(t) es Hurwitz ∀k >−0.07778 y aplicando el enfoque de Bialas obtenemos que p0(t) + kp1(t) is Hurwitz ∀k >−0.088889. Es decir kmin < k0.
10 DISENO DE CONTROLES ESTABILIZANTES
Corolario 10.1. Considerar el sistema
x = Ax + bu (3)
A =
0 1 0 · · · 00 0 1 · · · 0...
......
...0 0 0 · · · 1−an −an−1 −an−2 · · · −a1
b =
00...01
(4)
5
XVI Semana Regional de Investigacion y Docencia en Matematicas 21

u es una funcion de valores reales llamada control. Si tomamos el control u(t) satisfaciendou(t) = −λcT x donde c > 0 es solucion de
Dic > 0, i = 1, ..., n
el sistema controlado esx = (A− λbcT )x (5)
Entonces el control u es un control estabilizante en el origen para todo valor de λ. Es decirel origen es un punto de equlibrio asintoticamente estable para todo λ ≥ 0.
Ademas el control u es un control con la siguiente propiedad asintotica: uno de los eigen-valores de la matriz A − λbcT diverge a −∞ y los otros n − 1 eigenvalores convergen a lasraıces del polinomio P ∗
c (t) =∑n
i=1 citn−i.
Bibliografıa
[1] Aguirre, B. Ibarra, C. & Suarez, R. [2002] Sufficient algebraic conditions for stability of conesof polynomials. Systems & Control Letters 46, 255-263.
[2] Barmish, B. R. New Tools for Robustness of Linear Systems. Macmillan Publishing Co., NewYork, N. Y., (1994).
[3] Bhattacharayya, S.P.; Chapellat, H.; & Keel, L.H. [1995] Robust Control. The ParametricApproach (Prentice-Hall, Upper Saddle River, NJ).
[4] Bialas, S. A necessary and sufficient condition for the stability of convex combinations of sta-ble polynomials or matrices, Bulletin of the Polish Academy of Sciences, Technical Sciences,33, (1985) 473-480.
[5] H. Chapellat and S. P. Bhattacharyya, An alternative proof of Kharitonov’s theorem, IEEETrans. on Automatic Control, 34, No. 4, (1989) 448-450.
[6] Collatz, L. [1966] Functional Analysis and Numerical Mathematics. Academic Press, NewYork.
[7] Hinrichsen, D. & Kharitonov, V. L. [1995] Stability of polynomials with conic uncertainty.Math. Control Signal Systems 8, 97-117.
[8] Mangasarian, O. L. [1968] Characterizations of real matrices of monotone kind. SIAM ReviewVol. 10, No. 4, 439-441.
[9] A. Rantzer, Stability conditions for polytopes of polynomials, IEEE Trans. on Aut. Cont.,37, (1992) 79-89.
[10] Wonham, W.M. (1985). Linear multivariable control. A Geometric Approach. Springer-Verlag, New York.
6
22 XVI Semana Regional de Investigacion y Docencia en Matematicas

Plegado de Proteínas: Una Introducción
Dora Julia Borbón González1, Gareth J.Rylance2, and Roy L. Johnston2
1 Departamento de Matemáticas, Universidad de Sonora, México
2 Escuela de Química, Universidad de Birmingham, Inglaterra.
Resumen En este trabajo se describen, en términos generales, el problema del plegado de proteínas, los modelos de red o malla (los cuales son modelos simplificados para representar proteínas) y la metodología de algoritmos genéticos empleada. Se presentan algunos resultados obtenidos cuando es usado un programa de algoritmos genéticos en los modelos de malla de proteínas HP y BLN para obtener configuraciones de mínima energía para secuencias de 20, 24 y 36 aminoácidos. I. Introducción
Las proteínas son macromoléculas biológicas que desempeñan una amplia variedad de funciones esenciales, dinámicas y estructurales, en los animales y plantas. Funciones dinámicas como las que realizan las enzimas que actúan como catalizadores de reacciones químicas que ocurren en los organismos vivos; funciones estructurales como las proteínas que proporcionan la matriz para los tejidos óseo y conjuntivo que dan estructura y forma al organismo humano; otras funciones, como las de transporte, tal como la hemoglobina y mioglobina que transportan oxígeno en la sangre y el músculo, respectivamente (1).
Los aminoácidos son las unidades estructurales fundamentales de las proteínas; todos los tipos diferentes de proteínas se sintetizan inicialmente como polímeros de sólo 20 aminoácidos, conocidos como aminoácidos comunes(2). La secuencia particular de aminoácidos constituye la estructura primaria de la proteína (1, 3), esta secuencia es única para cada tipo de proteína. Ciertas secuencias de aminoácidos favorecen que la cadena polipeptídica se enrolle y gire formando una hélice, otras secuencias dan lugar a regiones similares a placas y a regiones en forma de asa; estos diferentes patrones espaciales de secciones locales de una proteína constituyen la estructura secundaria de ésta (3). La estructura terciaria se refiere a la estructura tridimensional global del polipéptido, que asume para realizar su función fisiológica; la estructura cuaternaria de una proteína es el arreglo espacial de 2 o más subunidades polipeptídicas, como la hemoglobina compuesta de 4 subunidades; no todas las proteínas tienen estructura cuaternaria (1).
Las proteínas se pliegan adoptando unas estructuras secundaria, terciaria y cuaternaria únicas (para su secuencia concreta de aminoácidos) lo cual se denomina su conformación nativa; ésta conformación única es la de menor energía libre de Gibbs (1).
El plegado de proteínas es un problema central en biología molecular y química computacional, cuya meta es determinar como una proteína se pliega a su estado nativo. De acuerdo a la hipótesis termodinámica desarrollada por Anfinsen [4], el estado nativo de una proteína es el de mínima energía. El “principio termodinámico de Anfinsen” sostiene que el estado nativo de una proteína es el más favorable, en términos termodinámicos, por lo que el plegado de la proteína corresponde a una reducción en la energía libre [5]. La conformación más estable de una molécula es de particular importancia debido a que ésta determina sus propiedades [6].
Existen diversos enfoques teóricos para estudiar el problema del plegado de proteínas. Uno de ellos es el de dinámica molecular, modelo de todos los átomos, el cual
XVI Semana Regional de Investigacion y Docencia en Matematicas 23
usa diversos modelos atomísticos estándar (como CHARMS y AMBER), los cuales son computacionalmente muy demandantes [7,8]. Otro enfoque está basado en la predicción experimental de la estructura, con técnicas como cristalografía de rayos X y resonancia magnética nuclear. Otro, está basado en modelos simplificados o minimalistas de la estructura de las proteínas; son representaciones simplificadas con un reducido alfabeto de clasificación de los aminoácidos (hidrofóbicos, polares y neutros) y con la restricción de que la cadena de aminoácidos yace sobre los puntos de una red o malla [9]. 1.1 Modelos de malla
El uso de los modelos de malla para representar proteínas permite el muestreo completo de todas las estructuras posibles de una secuencia de aminoácidos, a expensas del detalle molecular fino, a través del uso de un alfabeto de dos letras HP (hidrofóbico, polar) o de tres letras BLN (hidrofóbico, polar, neutro) para representar a los aminoácidos [9,10]. En estos modelos, los aminoácidos son vistos como cuentas en una cadena que yace en una malla (cuadrada, cúbica, u otra). En el caso de la malla de diamante, la cadena es tridimensional, con ángulos de enlace de 109°; no se permite que dos cuentas ocupen el mismo punto de la malla y la energía de la conformación (estructura) es determinada por el número de contactos entre las cuentas que estén como vecinos más cercanos en la malla pero que no son vecinos más cercanos en la cadena [11].
A pesar de la reducción en complejidad que se logra con el modelo minimalista HP, se ha demostrado que el problema de determinación de estructuras de proteínas de mínima energía pertenece al conjunto de problemas clasificados como “NP hard” [12], significando que no existe un algoritmo polinomial que pueda resolver el problema del plegado de proteínas exactamente; por lo tanto, es necesario adoptar heurísticas o algoritmos de aproximación para atacar este problema. Algunos enfoques incluyen simulación Monte Carlo [13, 14] y algoritmos genéticos [12, 15].
1.2 Los modelos HP y BLN
La interacción hidrofóbica en una proteína es considerada como un determinante principal en el plegado de proteínas; a su vez sirve de base para uno de los modelos más sencillos, el modelo HP [16]. En este modelo, los aminoácidos constituyentes de la proteína son representados mediante cuentas de una cadena, hidrofóbicas (H) o polares (P), las cuales yacen en una red (malla) bidimensional o tridimensional, siendo cuadradas o cúbicas las más comunes.
El modelo HP es uno de los modelos de red en donde una proteína es representada mediante un arreglo de cuentas, siendo los dos tipos principales las cuentas hidrofóbicas (H) y las hidrofílicas o polares (P) [16]. En este modelo, la energía de interacción entre dos residuos de aminoácidos hidrofóbicos (H) está dada por el valor de –1 (después de un escalamiento de la energía); la interacción se da cuando dos aminoácidos hidrofóbicos están en contacto en la red pero no son vecinos en la cadena que forman. Las energías de todas las posibles interacciones restantes tienen un valor de cero; el modelo HP tiende a generar estructuras compactas de baja energía, con un núcleo hidrofóbico y una superficie polar en las estructuras nativas, tal como se ha observado en las verdaderas proteínas [9,10]. El modelo HP a sido empleado en mallas cuadradas, triangulares, cúbicas y de diamante [10,17,18,19], con valores distintos para la energía de interacción entre las cuentas.
El modelo BLN usa un alfabeto de tres letras, cuentas hidrofóbicas (B), cuentas hidrofílicas o polares (L) y neutras (N), para describir el tipo de aminoácido y los cálculos
24 XVI Semana Regional de Investigacion y Docencia en Matematicas
de energía se basan en la distancia entre pares (primeros vecinos) entre las cuentas, usando un potencial de Lennard-Jones para las interacciones hidrofóbicas [20] y potenciales también de este tipo, pero modificados, para las otras posibles interacciones.
En el presente estudio se aplicó un programa de algoritmos genéticos con el fin de determinar los valores de los operadores genéticos de cruzamiento y mutación que permiten obtener con mayor frecuencia el estado de mínima energía de tres secuencias de 20, 24 y 36 aminoácidos, cuando se utilizan los modelos HP y BLN para la representación de una proteína, se utilizó una red de diamante en ambos modelos.
II. Metodología Se utilizó el programa de algoritmos genéticos (GA), desarrollado por el grupo de química teórica del Dr. Roy L. Johnston, en la Universidad de Birmingham, Reino Unido, para el cálculo de estructuras de mínima energía para secuencias de 20, 24 y 36 aminoácidos cuando se usan los modelos de malla de diamante HP y BLN para la representación tridimensional de las secuencias seleccionadas. El programa incorpora un esquema Monte Carlo para la búsqueda local de estructuras de mínima energía.
Los algoritmos genéticos pertenecen a una clase de métodos estocásticos de optimización; entre ellos figuran recocido simulado, aceptación de umbral, entre otros métodos [21]. Mientras la mayoría de los métodos de optimización estocásticos operan en una solución única a un problema dado, los algoritmos genéticos operan en una distribución o población de soluciones [20]. Tres aspectos importantes en el uso de algoritmos genéticos son: a) la definición de la función objetivo, b) la definición e implementación de la representación genética, c) la definición e implementación de los operadores genéticos. Al emplear un algoritmo genético hay que codificar las soluciones al problema en una estructura (vector de estructura), este objeto es llamado genoma (cromosoma). El algoritmo genético genera inicialmente una población de genomas para posteriormente aplicar los operadores de cruzamiento y mutación a los diversos individuos que conforman esta población, con el objetivo de generar nuevos individuos. Para ello emplea diversos criterios de selección para escoger los individuos más aptos para el cruzamiento; una función objetivo (función de aptitud) determina que tan apto es cada individuo [21]. Típicamente, el cruzamiento consiste en combinar dos individuos para producir descendencia, mientras un operador de mutación introduce cierta aleatoriedad en la búsqueda, permitiendo encontrar soluciones que con el simple cruzamiento no se encontrarían; algunas operaciones no-estándar de los algoritmos genéticos son el uso de un “depredador de duplicados”, el cual elimina de la población conformaciones idénticas, así como la introducción de “elitismo”, el cual permite que los individuos más aptos en la población no sufran mutación alguna de generación en generación [22]. Los métodos Monte Carlo son técnicas no deterministas las cuales se emplean para simular el comportamiento de un sistema físico, biológico o matemático; el comportamiento estocástico de estos métodos se deriva del uso de secuencias de números aleatorios, empleándose frecuentemente en el estudio de sistemas con un gran número de grados acoplados de libertad [23].
En este estudio, las cálculos computacionales fueron realizados siguiendo un diseño combinatorio con diversos niveles (en el rango de 0.2 a 0.8) para las tasas de cruzamiento y de mutación; en todas las corridas efectuadas el tamaño de la población se fijó en 200 individuos y el número de generaciones en 300, con una tasa de elitismo de cero (no permitiendo que los individuos más aptos sobrevivieran sin cambio alguno de una generación a otra) y un valor de 1 para el depredador de duplicados (lo cual implica que
XVI Semana Regional de Investigacion y Docencia en Matematicas 25
ningún individuo duplicado es elegido para ser parte de la nueva población de padres). El objetivo de estos cálculos fue el determinar los mejores valores para las tasas de cruzamiento y mutación que generaran estructuras de mínima energía para las secuencias de aminoácidos seleccionadas. III. Resultados
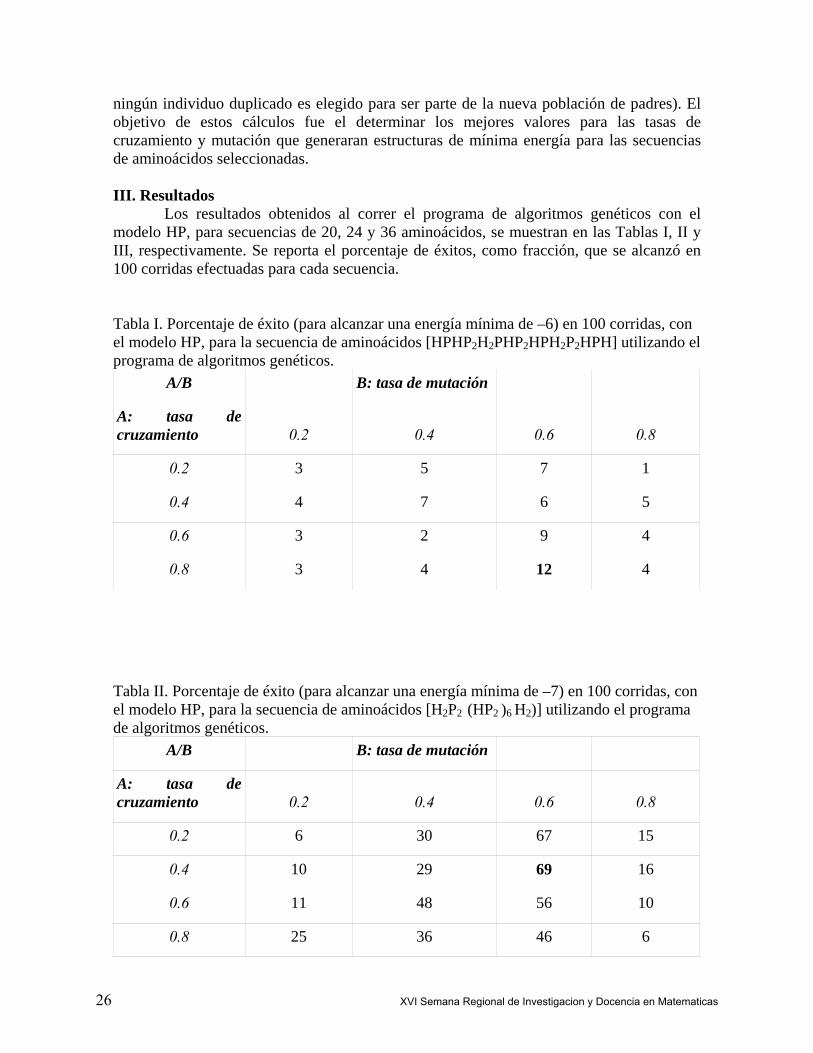
Los resultados obtenidos al correr el programa de algoritmos genéticos con el modelo HP, para secuencias de 20, 24 y 36 aminoácidos, se muestran en las Tablas I, II y III, respectivamente. Se reporta el porcentaje de éxitos, como fracción, que se alcanzó en 100 corridas efectuadas para cada secuencia. Tabla I. Porcentaje de éxito (para alcanzar una energía mínima de –6) en 100 corridas, con el modelo HP, para la secuencia de aminoácidos [HPHP2H2PHP2HPH2P2HPH] utilizando el programa de algoritmos genéticos.
A/B B: tasa de mutación
A: tasa de cruzamiento 0.2 0.4 0.6 0.8
0.2 3 5 7 1
0.4 4 7 6 5
0.6 3 2 9 4
0.8 3 4 12 4
Tabla II. Porcentaje de éxito (para alcanzar una energía mínima de –7) en 100 corridas, con el modelo HP, para la secuencia de aminoácidos [H2P2 (HP2 )6 H2)] utilizando el programa de algoritmos genéticos.
A/B B: tasa de mutación
A: tasa de cruzamiento 0.2 0.4 0.6 0.8
0.2 6 30 67 15
0.4 10 29 69 16
0.6 11 48 56 10
0.8 25 36 46 6
26 XVI Semana Regional de Investigacion y Docencia en Matematicas
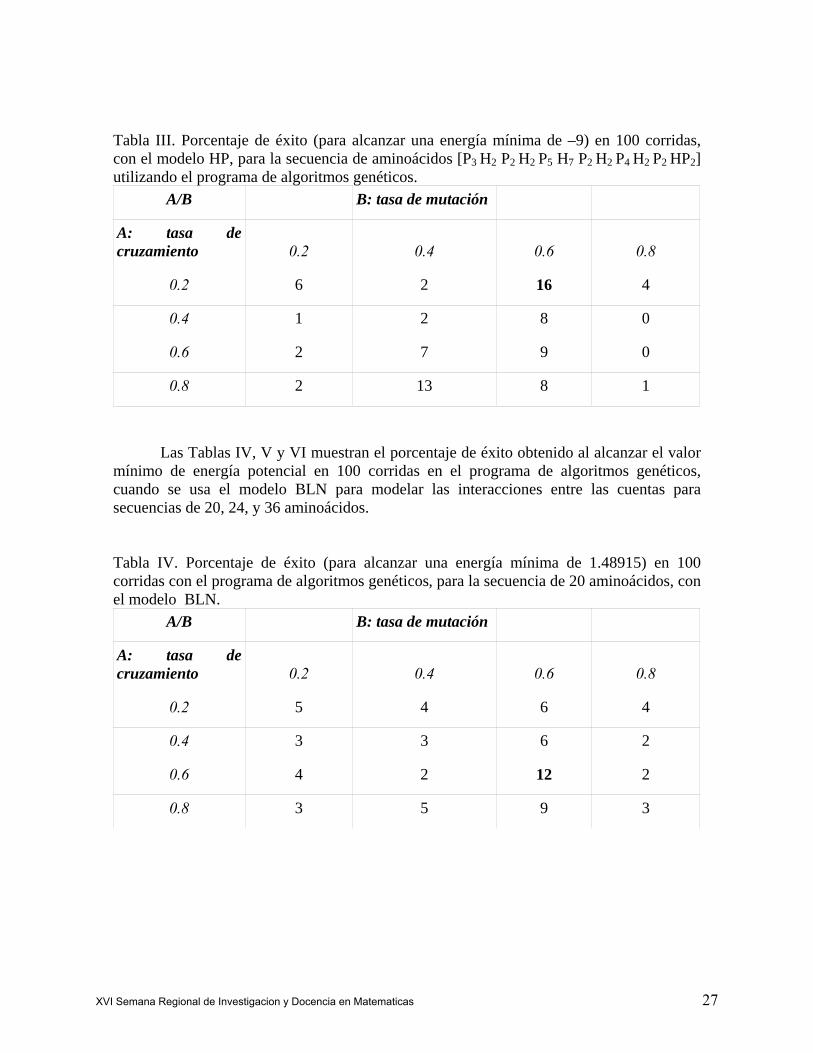
Tabla III. Porcentaje de éxito (para alcanzar una energía mínima de –9) en 100 corridas, con el modelo HP, para la secuencia de aminoácidos [P3 H2 P2 H2 P5 H7 P2 H2 P4 H2 P2 HP2] utilizando el programa de algoritmos genéticos.
A/B B: tasa de mutación
A: tasa de cruzamiento 0.2 0.4 0.6 0.8
0.2 6 2 16 4
0.4 1 2 8 0
0.6 2 7 9 0
0.8 2 13 8 1
Las Tablas IV, V y VI muestran el porcentaje de éxito obtenido al alcanzar el valor mínimo de energía potencial en 100 corridas en el programa de algoritmos genéticos, cuando se usa el modelo BLN para modelar las interacciones entre las cuentas para secuencias de 20, 24, y 36 aminoácidos.
Tabla IV. Porcentaje de éxito (para alcanzar una energía mínima de 1.48915) en 100 corridas con el programa de algoritmos genéticos, para la secuencia de 20 aminoácidos, con el modelo BLN.
A/B B: tasa de mutación
A: tasa de cruzamiento 0.2 0.4 0.6 0.8
0.2 5 4 6 4
0.4 3 3 6 2
0.6 4 2 12 2
0.8 3 5 9 3
XVI Semana Regional de Investigacion y Docencia en Matematicas 27
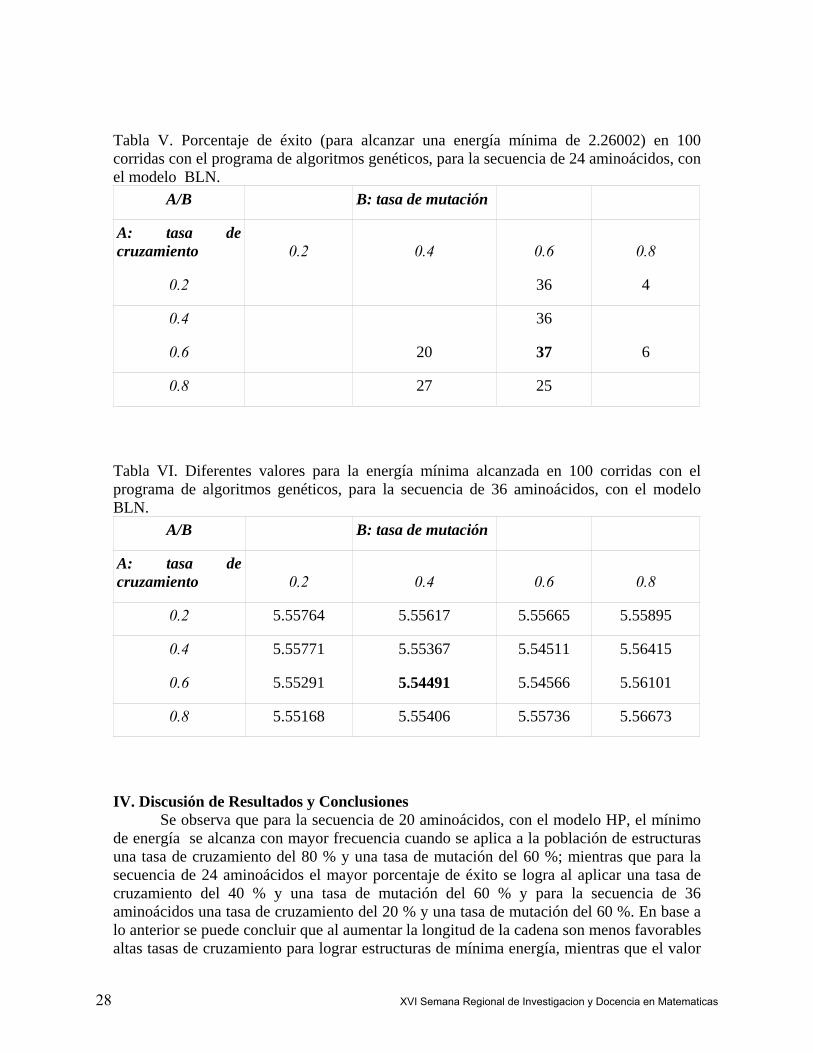
Tabla V. Porcentaje de éxito (para alcanzar una energía mínima de 2.26002) en 100 corridas con el programa de algoritmos genéticos, para la secuencia de 24 aminoácidos, con el modelo BLN.
A/B B: tasa de mutación
A: tasa de cruzamiento 0.2 0.4 0.6 0.8
0.2 36 4
0.4 36
0.6 20 37 6
0.8 27 25
Tabla VI. Diferentes valores para la energía mínima alcanzada en 100 corridas con el programa de algoritmos genéticos, para la secuencia de 36 aminoácidos, con el modelo BLN.
A/B B: tasa de mutación
A: tasa de cruzamiento 0.2 0.4 0.6 0.8
0.2 5.55764 5.55617 5.55665 5.55895
0.4 5.55771 5.55367 5.54511 5.56415
0.6 5.55291 5.54491 5.54566 5.56101
0.8 5.55168 5.55406 5.55736 5.56673
IV. Discusión de Resultados y Conclusiones
Se observa que para la secuencia de 20 aminoácidos, con el modelo HP, el mínimo de energía se alcanza con mayor frecuencia cuando se aplica a la población de estructuras una tasa de cruzamiento del 80 % y una tasa de mutación del 60 %; mientras que para la secuencia de 24 aminoácidos el mayor porcentaje de éxito se logra al aplicar una tasa de cruzamiento del 40 % y una tasa de mutación del 60 % y para la secuencia de 36 aminoácidos una tasa de cruzamiento del 20 % y una tasa de mutación del 60 %. En base a lo anterior se puede concluir que al aumentar la longitud de la cadena son menos favorables altas tasas de cruzamiento para lograr estructuras de mínima energía, mientras que el valor
28 XVI Semana Regional de Investigacion y Docencia en Matematicas

óptimo de mutación aparentemente es de un 60%. Por el contrario, con el modelo BLN se observa que al parecer la longitud de la cadena no tiene una influencia determinante para alcanzar el valor mínimo de energía cuando se aplica 60 % de cruzamiento a la población de estructuras y se fija el porcentaje de mutación en 60 %, aunque los resultados con este modelo indican que al crecer la cadena resulta conveniente bajar el porcentaje de mutación. Reconocimiento DJBG: A la Universidad de Sonora por el apoyo para realizar un semestre sabático en la Universidad de Birmingham, lo que me permitió colaborar con el grupo de investigación que dirige el Dr. Roy Johnston, a través del presente trabajo. Bibliografía [1] Devlin, T.M. (1999) Bioquímica. Vol. 1. Editorial Reverté, S.A. [2] Chang, R. (1999) Química. Editorial Mc Graw Hill. [3] Starr, C. y Taggart, R. (2004) Biología. Editorial Thomson. [4] Anfinsen, C. B. (1973) Principles that Govern the Folding of Proteins Chains. Science, 181, 223-230 . [5] Wales, D. J. (2003) Energy Landscapes. Cambridge University Press . [6] Maranas, C.D., and Floudas C.A. (1994) A deterministic global optimization approach for molecular structure determination. J. Chem. Phys. 100 (2), 1247-1261 . [7] Okamoto, Y. (1998) Protein Folding Problem as Studied by New Simulation Algorithms. Rec. Res. Dev. in Pure & Applied Chemistry 2, 1-22 . [8] Snow, D.C., Sorin, E.J., Rhee, Y.M., and Pande, V.S. (2005) How Well Can Simulation Predict Protein Folding Kinetic and Thermodynamics?Annu. Rev.Biophs. Struct. 34, 43-69. [9] Blackburn, B., and Hirst, J.D. (2001) Evolution of Functional Model Proteins. J. Chem. Phys. 115,1935 . [10] Blackburn, B., and Hirst, J.D. (2005) Population Dynamic Simulations of Functional Model Proteins. J. Chem. Phys. 123, 154907 . [11] Blackburn, B., and Hirst, J.D. (2003) Three-dimensional functional model proteins: Structure function and evolution. J. Chem. Phys. 119, 3453 . [12] Unger, R., and Moult, J. (1993) J. Mol. Biol. 231, 75 [13] Ramakrishnan, R., Ramachandran, B., and Pekny, J.F. (1997) J. Chem. Phys. 106, 2418. [14] Liang, F., and Wong, W.H. (2001) J. Chem. Phys. 115, 3374. [15] Unger, R. (2004) In: Johnston, R.L. (ed) Applications of evolutionary computations in chemistry. Structure and bonding, vol. 110. Springer, Berlin Heidelberg, New York pp 153-175. [16] Chan, H.S., and Dill, K.A. (1991) J. Chem. Phys. 95, 3775. [17] Tatsumi, R., and Chikenji, G. (1999) Origin of the designability of protein structures. Phys. Rev. E 60, 4696. [18] Li, H, Helling, R., Tang, C., and Wingreen. (1996) Science 273, 666 [19] Irbäck, A., and Sandelin. (1998) J. Chem. Phys. 108, 2245 [20] Leach, A.R. (1996) Molecular Modelling: Principles and Applications. Addison Wesley Longman L. [21] Goldberg, D.E. (1989) Genetic Algorithms in Search, Optimization and Machine Learning. Addison-Wesley. [22] Cox G.A., Mortimer-Jones T.V., Taylor R.P., and Johnston R.L.(2004) Theor. Chem. Acc. 112: 163-178. [23] Hammond, B.L., Lester, Jr. W.A., & Reynolds, P.J. (1994) Monte Carlo Methods in Ab Initio Quantum Chemistry. World Scientific Publishing Co. Pte. Ltd.
XVI Semana Regional de Investigacion y Docencia en Matematicas 29

Nivel Superior
Control of oscillations from the k-zero Hopf bifurcation
Fco. Armando Carrillo N., Fernando Verduzco G.∗
Sonora University (UNISON)Mexico
Abstract
An analytical method to control oscillations in nonlinear control systems, whoselinearization around the origin has two imaginary eigenvalues and k eigenvalues zero,is presented. The idea is to use a curve of Hopf bifurcation points that there exists onthe versal deformation of the k-zero Hopf bifurcation, to control oscillations. Then thegeneral case is reduced to the Hopf bifurcation case through a change of coordinates anda change in the input control.
Key words: Controllable Hopf bifurcation, k-zero Hopf bifurcation, bifurcation con-trol.
1 Introduction
The k-zero Hopf bifurcation occurs when the linear part of the vector field has two imaginaryeigenvalues, k zero eigenvalues and the rest have real part different of zero. See [1] and [5]for the case k = 1.The idea in this document is to design a feedback control and a change of coordinates in asuch way that the original control system transforms into the called controllable Hopf bifur-cation normal form.In [3, 4] has been developed an approach to establish the stability and direction of the limitcycle that emerges from the Hopf bifurcation, that is, a method to control the emerginglimit cycle. In this document, given a nonlinear control system, which linearization has atwo imaginary eigenvalues, k eigenvalues zero and the rest outside of the imaginary axis (inthe left side), the idea is to design a feedback control such that, first, transforms the k zeroeigenvalues in negative eigenvalues, without change the other eigenvalues, and next, use themethod developed in [3, 4] to control the Hopf bifurcation.
∗Mail address: Universidad de Sonora, Rosales and Transversal, Hermosillo, Sonora, Mex-ico. Phone: +52.662.2592155, Fax: +52.662.2592219. E-mails: [email protected], [email protected]
1
30 XVI Semana Regional de Investigacion y Docencia en Matematicas

2
2 Statement of the problem
Consider the nonlinear control system
ξ = Jξ + F (ξ) + G(ξ)u (1)
where u ∈ R,
J =
J1 0 00 Jk 0
0 0 JS
, (2)
with J1 =
(0 −ωω 0
), ω > 0, and
Jk =
0 1 0 · · · 00 0 1 · · · 0...
......
. . ....
0 0 0 · · · 10 0 0 · · · 0
k×k
and JS ∈ Rn−(k+2)×n−(k+2) is Hurwitz stable; F, G : Rn → Rn are smooth vector fields such
that F (0) = 0 and G(0) =
b1
b2
b3
, where b1 =
(b11
b12
), b2 =
b21...
b2k
and ξ =
z1
z2
w
,
with z1 ∈ R2, z2 ∈ Rk and w ∈ Rn−(k+2). Then, our goal is to design an state feedbackcontrol
u = u(z, µ) (3)
such that the closed-loop system (1)-(3) undergoes the called controllable Hopf bifurcationat ξ = 0 when µ = 0.
3 Some important results
3.1 Sylvester equations
Definition 1 i) The spectrum of a square matrix A, denoted by σ(A), is defined by
σ(A) = λ ∈ C |λ is an eigenvalue of A
ii) A linear matrix equation of the form
AX −XS = R, (4)
where A and S are square matrices of possible different dimension, in the unknown Xis known as Sylvester equation.
XVI Semana Regional de Investigacion y Docencia en Matematicas 31

3
Lemma 2 The Sylvester equation (4) has a solution X for each R if and only if
σ(A) ∩ σ(S) = ∅.
If this is the case, then the solution X is unique.
3.2 Hopf bifurcation theorem
Theorem 3 (Hopf Bifurcation Theorem)([2]) Suppose that the system x = f(x, µ), x ∈ Rn,µ ∈ R, has an equilibrium point (x0, µ0) such that
(H1) Dxf(x0, µ0) has a simple pair of pure imaginary eigenvalues and no other eigenvalueswith zero real parts.
(H2) Let λ(µ), λ(µ) be the eigenvalues of Dxf(x0, µ0) which are imaginary at µ = µ0, suchthat
d =d
dµ(Re(λ(µ))) |µ=µ0 6= 0. (5)
Then there is a unique three-dimensional center manifold passing through (x0, µ0) ∈ Rn ×Rand a smooth system of coordinates for which the Taylor expansion of degree three on thecenter manifold, in polar coordinates, is given by
r = (dµ + l1r2)r,
θ = ω + cµ + br2.
If l1 6= 0, then there is a surface of periodic solutions in the center manifold which hasquadratic tangency with the eigenspace of λ(µ0), λ(µ0) agreeing to second order with theparaboloid µ = − l1
dr2. If l1 < 0, then these periodic solutions are stable, while if l1 > 0, they
are repelling limit cycles.
The stability coefficients d and l1 are called cross speed and first Lyapunov coefficient, re-spectively.
3.3 Controllable Hopf bifurcation theorem
Definition 4 Among the systems that undergo the Hopf bifurcation and that is possible tocontrol it, we call the controllable Hopf bifurcation normal form to
η = f(η) + g(η)u, (6)
where η ∈ Rn, u ∈ R, f(0) = 0, Df(0) =
(JH 00 JS
), with JH =
(0 −ωω 0
)and
σ(JS) ⊂ C− = z ∈ C |Re(z) < 0 , and g(0) =
(b1
b2
)with 0 6= b1 ∈ R2.
32 XVI Semana Regional de Investigacion y Docencia en Matematicas

4
The next theorem permits establish a priori, for a system in the controllable Hopf bifurcationnormal form, the values of l1 and d, that is, it permits to control the direction and stabilityof the periodic solution that emerges form the Hopf bifurcation.
Theorem 5 (Controllable Hopf bifurcation theorem)[4] Given the system (6), where η =(xy
), with x =
(x1
x2
), and b1 6= 0, then the state feedback control
v(x, µ, β, γ) = µ(β1x1 + β2x2) + γ1x31 + γ2x
32, (7)
is such that the closed-loop system (6-7) undergoes the Hopf bifurcation at η = 0 when µ = 0.Moreover, the cross speed d and the first Lyapunov coefficient l1, are given by
d =1
2β · b1 and l1 = c0 +
3
8γ · b1, (8)
where β = (β1, β2), γ = (γ1, γ2) and c0 is a constant that depends of the vector fields f andg.
4 Control of oscillations
The idea is to find an state feedback control u = αz2+v, where α = (α1, α2, . . . , αk) ∈ Rk withz2 definite above, and a change of coordinates η = ϕ(ξ), such that (1) can be transformedinto the system (6), and then apply the theorem 5 to control oscillations from the k-zeroHopf bifurcation.
Consider the nonlinear system (1) and the control law u = αz2 + v, then
ξ = Jξ + F (ξ) + G(ξ)u
= Jξ + F (ξ) + G(ξ)(αz2 + v)
= Jξ + F (ξ) + G(ξ)v, (9)
where J =
J1 b1α 00 Jk + b2α 0
0 b3α JS
. Observe that this matrix is triangular by blocks, then
its eigenvalues are given by the eigenvalues of J1, Jk + b2α and JS. Then we must to find αsuch that the eigenvalues of Jk + b2α are on C−. Observe that
Jk + b2α =
b21α1 b21α2 + 1 b21α3 · · · b21αk
b22α1 b22α2 b22α3 + 1 · · · b22αk...
b2,k−1α1 b2,k−1α2 b2,k−1α3 · · · b2,k−1αk + 1b2kα1 b2kα2 b2kα3 · · · b2kαk
k×k
.
XVI Semana Regional de Investigacion y Docencia en Matematicas 33

5
Lemma 6 If b2k 6= 0, then there exists α ∈ Rk such that
(i) σ(Jk + b2α) ⊂ C−
(ii) σ(Jk + b2α) ∩ σ(JS) = ∅
Proof:Let JS ∈ Rk×k be a matrix such that σ(JS) ⊂ C− and σ(JS)∩σ(JS) = ∅, with characteristicpolynomial
pJS(λ) = λk + ckλ
k−1 + · · ·+ c2λ + c1.
We must to find α = (α1, . . . , αk) ∈ Rk such that
pJk+b2α(λ) ≡ pJS(λ). (10)
Now then, it is not difficult to see that
pJk+b2α(λ) = λk + pk(α)λk−1 + · · ·+ p2(α)λ + p1(α),
where
p1(α) = −b2kα1
p2(α) = −(b2,k−1α1 + b2kα2)...
pk(α) = −(b21α1 + b22α2 + · · ·+ b2kαk).
Then, (10) is equivalent to
p1(α) = c1
p2(α) = c2...
pk(α) = ck
⇔
−b2k 0 0 · · · 0−b2,k−1 −b2k 0 · · · 0
. . . . . ....
. . . 0−b21 −b22 −b23 · · · −b2k
α1
α2...
αk
=
c1
c2...ck
⇔ Tα = C
⇔ α = T−1C. (11)
This finish the proof.
Finally, if
b1α =
(b11α1 · · · b11αk
b12α1 · · · b12αk
)= B1 and b3α =
b31α1 · · · b31αk...
b3,n−(k+2)α1 · · · b3,n−(k+2)αk
= B2,
34 XVI Semana Regional de Investigacion y Docencia en Matematicas

6
then
J =
J1 B1 00 Jk + b2α 0
0 B2 JS
=
J1 B1 00 JS 0
0 B2 JS
,
has two imaginary eigenvalues, and the rest of them can be at any place on C−.
4.1 Change of coordinates
To use the theorem 5, we need to find a change of coordinates η = ϕ(ξ), to put J in Jordanblocks.
Lemma 7 If b2k 6= 0, then there exist P ∈ R2×k and Q ∈ Rn−(k+2)×k such that
P =
I P 00 I 00 Q I
,
satisfy
P−1JP =
J1 0 00 JS 0
0 0 JS
= J . (12)
Proof:First, observe that
P−1 =
I −P 00 I 00 −Q I
.
Next,
P−1JP =
J1 X1 00 JS 0
0 X2 JS
,
where X1 = J1P − P JS + B1 and X2 = JSQ − QJS + B2. But, by lemmas 2 and 6, thereexist P and Q such that the matrix equations
J1P − P JS + B1 = 0 (13)
JSQ−QJS + B2 = 0
have a unique solution for each B1 and B2. This finish the proof.
The change of coordinates η = P−1ξ transforms (9) into the system
η = Jη + F (η) + G(η)v (14)
XVI Semana Regional de Investigacion y Docencia en Matematicas 35

7
where J is given by (12) and G(η) = P−1G(Pξ). If G(0) =
b1
b2
b3
, where b1 =
(b11
b12
),
b2 =
b21...
b2k
and b3 =
b31...
b3,n−(k+2)
, it follows that,
b1
b2
b3
= G(0) = P−1G(0) =
I −P 00 I 00 −Q I
b1
b2
b3
=
b1 − Pb2
b2
−Qb2 + b3
,
that is, b1 = b1 − Pb2 =
(b11
b12
). Now then, if P =
(p11 · · · p1k
p21 · · · p2k
), then
b11 = b11 −k∑
j=1
p1jb2j and b12 = b12 −k∑
j=1
p2jb2j. (15)
Finally, to use the theorem 5, we must to establish when b1 6= 0.
Lemma 8 If b1 6= 0 then b1 6= 0.
Proof:We know that P satisfy (13), that is,
0 =
(0 −ωω 0
)(p11 · · · p1k
p21 · · · p2k
)−
(p11 · · · p1k
p21 · · · p2k
)
b21α1 b21α2 + 1 b21α3 · · · b21αk
b22α1 b22α2 b22α3 + 1 · · · b22αk...
b2,k−1α1 b2,k−1α2 b2,k−1α3 · · · b2,k−1αk + 1b2kα1 b2kα2 b2kα3 · · · b2kαk
+
(b11α1 · · · b11αk
b12α1 · · · b12αk
). (16)
Therefore, from (16) is clear that
ωp1i − p2,i−1 + b12αi = 0 and ωp2i + p1,i−1 − b11αi = 0, (17)
for i = 1, . . . , k where p10 = p20 = 0.
Let us suppose that b1 = 0, that is b11 = 0 and b12 = 0. Then, from (17) to obtain
ωp1i − p2,i−1 = 0 and ωp2i + p1,i−1 = 0, for i = 1, . . . , k,
36 XVI Semana Regional de Investigacion y Docencia en Matematicas

8
that is
p1i =p2,i−1
ωand p2i = −p1,i−1
ω, for i = 1, . . . , k.
If i = 1, then
p11 =0
ω= 0 and p21 = − 0
ω= 0.
If i = 2,
p12 =0
ω= 0 and p22 = − 0
ω= 0,
and so on. Then, P = [pij] = 0, therefore that b1 = b1 = 0, which is a contradiction. Then
b1 = 0. This finish the proof.
4.2 Design of the control law
If ξ =
z1
z2
w
, where z1 =
(z11
z12
), and z2 =
z21
z22...
z2k
, and η =
x1
x2
y
, then
x1
x2
y
= η = P−1ξ =
I −P 00 I 00 −Q I
z1
z2
w
=
z1 − Pz2
z2
−Qz2 + w
,
that is,
x1i = z1i −k∑
j=1
pijz2j, for i = 1, 2, (18)
Now, from the theorem 5, system (14) undergoes the called controllable Hopf bifurcation ifthe state feedback control v is given by
v = µ (β1x11 + β2x12) + γ1x311 + γ2x
312
= µ
[β1
(z11 −
k∑j=1
p1jz2j
)+ β2
(z12 −
k∑j=1
p2jz2j
)]
+γ1
(z11 −
k∑j=1
p1jz2j
)3
+ γ2
(z12 −
k∑j=1
p2jz2j
)3
,
with the stability coefficients
d =1
2βb1 and l1 = c0 +
3
8γb1, (19)
XVI Semana Regional de Investigacion y Docencia en Matematicas 37

9
where β = (β1, β2), γ = (γ1, γ2) and c0 is a constant that depends of the vector fields F andG. Then, system (1) undergoes the called controllable Hopf bifurcation when
u = αz2 + µ
[β1
(z11 −
k∑j=1
p1jz2j
)+ β2
(z12 −
k∑j=1
p2jz2j
)]
+γ1
(z11 −
k∑j=1
p1jz2j
)3
+ γ2
(z12 −
k∑j=1
p2jz2j
)3
, (20)
where α is given by (11),
4.3 Main theorem
Then, we have proved the main theorem in this paper.
Theorem 9 Consider the nonlinear control system
ξ = Jξ + F (ξ) + G(ξ)u,
where J is given by (2), and G(0) =
b1
b2
b3
, where b2 =
b21...
b2k
. If b1 6= 0, and b2k 6= 0,
then the closed loop system (1)-(20) undergoes the controllable Hopf bifurcation, with thestability coefficients (19).
5 Conclusions
An analytical method to control oscillations, for a class of nonlinear control systems, hasbeen developed. The method consists in to find a change of the input control and coordinatesin a such way that the nonlinear control system (1) is transformed into the controllable Hopfbifurcation normal form.
References
[1] J. Guckenheimer and P. Holmes. Nonlinear oscillations, Dynamical systems, and bifur-cations of vector fields. Springer-Verlag. 1993.
[2] E. Hopf. ”Abzweigung einer periodischen Losung von einer stationaren Losung einesDifferentialsystems. S-B. Sachs. Akad. Wiss. Leipzing Math.-Natur. Kl. 84, 3-22. 1942.
38 XVI Semana Regional de Investigacion y Docencia en Matematicas

10
[3] F. Verduzco, J. Alvarez. “Hopf bifurcation control for affine systems”. Proc. AmericanControl Conference 2004. Boston, USA.
[4] F. Verduzco, J. Alvarez. “Hopf bifurcation control: a new approach”. Accepted toSystems and Control Letters.
[5] S. Wiggins. Introduction to Applied Nonlinear Dynamical Systems and Chaos. Texts inApplied Mathematics, Vol. 2. Springer-Verlag. Second Edition. 2003.
XVI Semana Regional de Investigacion y Docencia en Matematicas 39

Nivel Superior
Una manera alternativa de calcular determinantes
Jose D. Davila Galindo
Universidad de Sonora
16 de Enero, 2006
Resumen
En este trabajo se presenta una manera para calcular determinantes de orden grande,que resulta computacionalmente mas economica que la que se desprende de la definicionmisma de determinante. La idea central del metodo consiste en, dado un determinantede orden n, mediante el calculo de ciertos determinantes de orden dos, reducir suce-sivamente el tamano del determinante original, hasta terminar con el determinantebuscado. Este metodo, ademas de ser eficiente, resulta ser de facil memorizacion.
1 Introduccion
Es posible que en la actualidad sea raro que alguien calcule “a mano” el determinante deuna matriz grande (de tamano n > 5, digamos). El metodo mas usuado para calculardeterminantes es la formula de Laplace (expansion por menores a lo largo de una fila ocolumna). Tambien es frecuente simplificar el determinante buscado realizando operacioneselementales por filas. A partir de la definicion se han desarrollado procedimientos muyconocidos para calcular determinantes de tamano dos por dos y tres por tres.
En esta nota se presenta una manera de calcular determinantes computacionalmente maseconomica que otros metodos. Este metodo, llamado a veces, de condensacion de Chio tienela ventaja de que requiere solo el calculo de determinantes de tamano dos por dos. La ideacentral del metodo no es nueva, pero si poco difundida.
En las Seccion 2 escribimos la definicion de determinante y ejemplificamos el uso dela definicion. En la seccion 3 revisamos las formula de Laplace, que es posiblemente elalgoritmo mas usado, ası como algunos casos en los que es posble calcular determinantes apartir de otros conocidos. Tambien se discute el numero de operaciones que se requierenpara calcular un determinante usando el algoritmo de Laplace. En la seccion 4 presentamosel teorema basico del metodo de Chio y el algoritmo que de el se desprende, lo ilustramoscon un ejemplo, y comparamos el numero de operaciones requeridas con el de Laplace.
2 La definicion de Determinante
Sea S un conjunto ordenado. Una transformacin biyectiva t : S → S se llama permutacionde (los elementos de) S.
Una permutacion que intercambia solo dos elementos de S (dejando fijos los demas) sellama transposicion.
140 XVI Semana Regional de Investigacion y Docencia en Matematicas

Toda permutacion se puede escribir como un producto (es decir, como una composicion)de transposiciones.
Si una permutacion de n elementos se puede expresar como un numero par de trasposi-ciones, entonces la permutacion se dice ser par. Si la permutacion se puede escribir como elproducto de un numero impar de permutaciones, entonces la permutacion se dice ser impar.
Sea S = 1, 2, 3, . . . , n y sea t una permutacion de S. Ası
t(1, 2, 3, ..., n) = (t(1), t(2), ..., t(n)).
Hay n! posibles permutaciones de S.
Sea A = (aij) una matriz cuadrada de tamano n.El determinante de A, denotado con det(A), es el numero real definido mediante
det(A) =∑
t∈Π
sgn(t)a1,t(1)a2,t(2) · · · an,t(n)
donde Π es el conjunto de las n! permutaciones de S y sgn(t) es +1 cuando la permutaciones par y -1 cuando la permutacion es impar.
Ejemplo 2.1. Si A = (a) entonces det(A) = a.
Ejemplo 2.2. Determinante de una matriz de tamano n = 2, A =
(a11 a12
a21 a22
).
En este caso hay 2! = 2 permutaciones de S = 1, 2. Estas permutaciones transformanS = 1, 2 en
(1,2), (permutacion par),(2,1), (permutacion impar).
Entonces
det(A) = a11a22 − a12a21. (1)
Ejemplo 2.3. Determinante de una matriz de tamano n = 3, A =
a11 a12 a13
a21 a22 a23
a31 a32 a33
.
En este caso hay 3! = 6 permutaciones de S = 1, 2, 3. Estas permutaciones transformanS = 1, 2, 3 en
(1, 2, 3), (2, 3, 1), (3, 1, 2) (permutaciones pares)(3, 2, 1), (1, 3, 2), (2, 1, 3) (permutaciones impares)
Entonces,
det(A) = a11a22a33 + a12a23a31 + a13a21a32 − a13a22a31 − a11a23a32 − a12a21a33. (2)
2XVI Semana Regional de Investigacion y Docencia en Matematicas 41
3 Algunas propiedades de los determinantes
Hay maneras muy conocidas para recordar como calcular determinantes de matrices detamano 2 y 3 pero, en general, el calculo de un determinante es una tarea laboriosa, sobretodo si la matriz es “grande” (de tamao n > 3).
Existen maneras alternativas (y equivalentes, por supuesto) de calcular un determinante.Una es la conocida formula de Laplace, que involucra un proceso recursivo. El determinantede una matriz de tamano n se expresa en terminos de n determinantes (llamados cofactores)de matrices de tamano n − 1 y ası se continua hasta reducir el problema al calculo dedeterminantes de matrices de tamano 3 (o 2) (usando (2) o (1), respectivamente).
En concreto, la formula de Laplace establece que
det(A) =n∑
j=1
aijCij
donde i = 1, 2, · · · o n, y Cij es el cofactor de la entrada ij , definido mediante Cij =(−1)1+jMij , donde Mij es el menor de la entrada ij, definido como el determinante de lamatriz (de tamano n − 1) que resulta al eliminar de A la i-esima fila y la j-esima columna.
El numero Ln de operaciones aritmeticas requeridas para encontrar det(A) usando laformula de Laplace se puede obtener recusrivamente. Si A es de tamano n = 2 se requierenL2 = 3 operaciones: dos multipliciones y una sustraccion. Si n = 3, se deben calcular trescofactores de tamano 2, multiplicarlos por las correspondientes entradas y luego sumarlos.Esto da L3 = 3L2 + 2. Continuando de esta manera vemos que
Ln = nLn−1 + n − 1 con L2 = 3. (3)
Otra manera consiste en usar, en la medida de los posible, propiedades de los determi-nantes, que se deducen de la definicion. Algunas de estas propiedades son las siguientes.
Sean A,B,C matrices de tamano n. La funcion determinante tiene las propiedades sigu-ientes.
a. det I = 1, donde I es la matriz identidad (de cualquier tamano).
b. Si B se obtiene de A intercambiando dos renglones (o dos columnas), entonces detB =−detA.
c. Si B se obtiene multiplicando un renglon (o una columna) de A por un escalar c,entonces detB = cdetA.
d. Si A,B y C son matrices identicas, excepto que para cierto i , el renglon i-esimo deC es igual a la suma del renglon i-esimo de A y el renglon i-esimo de B, entoncesdetC = detA + detB.
e. Si un renglon de A es multiplo de otro, entonces detA = 0.
f. Si B se obtiene sumando un multiplo de un renglon de A a otro renglon, entoncesdetC = detA.
342 XVI Semana Regional de Investigacion y Docencia en Matematicas
g. El determinante de una matriz triangular superior es igual al producto de las entradasde la diagonal.
La tabla siguiente muestra la relacion entre las operaciones de renglon y su efecto en eldeterminante de una matriz.
Operaciones de renglon en la matriz A Efecto en el determinante
1. Sumar un multiplo de un renglon(o de una columna) a otro(a)
: = det(A).
2. Multiplicar un renglon(o columna) por una constante
: = cdet(A).
3. Intercambiar dos renglones(o columnas)
: = −det(A).
4 Un algoritmo alternativo
La base del metodo de Chio es el siguiente teorema.
Teorema 4.1. Sea A ∈ Rn×n con a11 6= 0 y sea B ∈ R(n−1)×(n−1) cuya entrada ij es
bij = a11ai+1,j+1 − ai+1,1a1,j+1, i, j = 1, 2, . . . , n − 1.
Entonces detB = an−211 detA.
Demostracion: Sea
A =
a11 a12 a13 · · · a1n
a21 a22 a23 · · · a2n
a31 a32 a33 · · · a3n
......
.... . .
...
an1 an2 an3 · · · ann
.
Sea M la matriz que se obtiene al multiplicar las filas 2, 3, . . . , n de A por a11 :
M =
a11 a12 a13 · · · a1n
a11a21 a11a22 a11a23 · · · a11a2n
a11a31 a11a32 a11a33 · · · a11a3n
......
.... . .
...
a11an1 a11an2 a11an3 · · · a11ann
.
4XVI Semana Regional de Investigacion y Docencia en Matematicas 43

Obviamente, detM = an−111 detA. Ahora, a partir de M construımos la matriz C realizando
las siguientes operaciones elementales por renglon (Ri denota el i-esimo renglon):
Rj − aj1R1 → Rj, j = 2, 3, . . . , n :
C =
a11 a12 a13 · · · a1n
a11a21 − a21a11 a11a22 − a21a12 a11a23 − a21a13 · · · a11a2n − a21a1n
a11a31 − a31a11 a11a32 − a31a12 a11a33 − a31a13 · · · a11a3n − a31a1n
......
.... . .
...
a11an1 − an1a11 a11an2 − an1a12 a11an3 − an1a13 · · · a11ann − an1a1n
=
a11 a12 a13 · · · a1n
0 a11a22 − a21a12 a11a23 − a21a13 · · · a11a2n − a21a1n
0 a11a32 − a31a12 a11a33 − a31a13 · · · a11a3n − a31a1n
......
.... . .
...
0 a11an2 − an1a12 a11an3 − an1a13 · · · a11ann − an1a1n
=
a11 a12 a13 · · · a1n
00...0
B
.
Obviamente, detC = detM = an−111 detA. Pero, expandiendo el determinante de C por
la primera columna obtenenmos que detC = a11 detB. Entonces,
detB = an−211 detA,
Una aplicacion iterativa del teorema anterior resulta en el siguiente algoritmo para cal-cular el determinante de A
1.- Dada la matriz A = (aij), definimos A(0) = (a(0)ij ) = (aij) for i, j = 1, 2, . . . , n.
2.- Calculamos la matriz A(1) como sigue
A(1) = (a(1)ij )
cona
(1)ij = a
(0)11 a
(0)i+1,j+1 − a
(0)i+1,1a
(0)1,j+1; (4)
544 XVI Semana Regional de Investigacion y Docencia en Matematicas

3.- Para k = 1, 2, . . . , n − 1 construımos las matrices A(k) = (a(k)ij ) donde
a(k)ij =
a(k−1)11 a
(k−1)i+1,j+1 − a
(k−1)i+1,1 a
(k−1)1,j+1
a(k−2)11
; (5)
Si a(k−2)11 = 0 entonces buscamos un elemento en la primera columna de A(k−2) que sea
diferente de cero. Si tal elemento esta en la fila r, entonces intercambiamos la fila 1 porla fila r de A(k−2), y realizamos los calculos indicados en (5) teniendo en cuenta quecada vez que se haga tal operacion de intercambio cambiara el signo del determiantede A. Si para alguna k = 2, 3, . . . , n − 1, la primera columna de la matriz A(k−2) escero, entonces el determinante de A es cero.
4.- Entoncesdet(A) = a
(n−1)11 .
Ejemplo 4.2. Consideremos la siguiente matriz
A = A(0) =
2 −2 1 1
2 0 1 2
0 1 −2 1
1 −1 2 −1
Las matrices que se construyen en los pasos 2 y 3 del algoritmo anterior son:
A(1) =
4 0 2
2 −4 2
0 3 −3
, A(2) =
[−8 2
6 −6
], A(3) = [9] .
Entonces, detA = a(3)11 = 9.
Este metodo tiene la ventaja de ser computacionalmente mas economico que el metodode Laplace.
Si A es de tamano n, para calcular det(A) se deben calcular n − 1 matrices, A(1), . . . ,A(n−1). Para pasar de A = A(0) a A(1) se deben calcular (n − 1)2 numeros (las entradas deA(1)) y para cada uno de tales numeros se requieren tres operaciones (dos multiplicacionesy una resta), como se indica en (4). Para pasar de A(k−1) a A(k), para k = 2, 3, . . . , n − 1se requieren (n − k)2 numeros cada uno de los cuales se obtiene con 4 operaciones (dosmultiplicaciones, una resta y una division), como se indica en (5). El total de operacionesresulta ser, entonces,
Dn = 3(n − 1)2 + 4
n−1∑
k=2
(n − k)2 = 3(n − 1)2 + 4
n−2∑
k=1
k2
4n−1∑
k=1
k2 − (n − 1)2 = (n − 1)
(4
3n2 − 5
3n + 1
) (6)
6XVI Semana Regional de Investigacion y Docencia en Matematicas 45

En la Tabla 1 siguiente se puede apreciar la ventaja del algoritmo de Chio para los primerosvalores de n.
n Ln Dn
3 11 164 47 475 239 1046 1439 1957 10079 3288 80639 5119 755779 75210 7257599 1059
Table 1: Comparacion del numero de operaciones aritmeticas
5 Conclusiones
El algoritmo para calcular determinantes que hemos discutido es significativamente maseconomico que el de Laplace, como puede verse en la Tabla 1. Ademas tiene la ventaja deque las matrices A(1), A(2), . . . , A(n−1) se obtienen realizando solo operaciones de la forma(1).
Bibliografıa
[1] Eves, H. Chio’s Expansion. §3.6 en Elementary Matrix Theory, New York: Dover, pp.129-136, 1996.
[2] Chio, F. Memoire sur les fonctions connues sous le nom de resultantes ou dedeterminants. Turin: E. Pons, 1853.
[3] Householder, A. S. The Theory of Matrices in Numerical Analysis. New York: Dover,1975.
746 XVI Semana Regional de Investigacion y Docencia en Matematicas

Nivel superior Estabilidad en modelos de mutualismo
Mauricio Gil Gutiérrez
Universidad Autónoma Metropolitana
Unidad Iztapalapa
Resumen En la teoría de dinámica de poblaciones el mutualismo tiene una menor atención comparado con las interacciones del tipo depredador presa ó la competición entre especies. En este trabajo se describen los modelos no lineales más generales del mutualismo y algunas técnicas simples para determinar si el sistema no lineal de mutualismo es estable en una región finita. 1 Modelos no lineales de mutualismo La definición de mutualismo entre dos especies es: el tipo de interacción que se lleva a cabo entre las especies de manera que es benéfica para el crecimiento de ellas. En ecología esta interacción se puede confundir con el comensalismo entre dos especies en el cual una de las especies se beneficia de la interacción mientras que la otra no se ve afectada. Sea Ni(t) la densidad de la i-ésima especie.
Considerando el mutualismo entre m especies el modelo de esta interacción es:
; i=1,2,..,m (1) ),...,,( 21 miii NNNFNN =•
Por ejemplo para tres especies el modelo general es:
),,( 321111
.NNNFNN =
•
),,( 321111 NNNFNN =•
),,( 321333
.NNNFNN =
•
Supongamos que este modelo tiene un punto de equilibrio en (M1,M2,…,Mm)para Mi>0 ,1 ≤ i ≤ m, es decir Fi(M1,M2,…,Mm)=0 ; 1 ≤ i ≤ m. Además en el mutualismo se tiene que cumplir
0),...,( 1 ≥
∂∂
j
mi
NNNF ; i≠j (2)
Por el teorema de estabilidad de Liapunov se sabe que una condición necesaria para que un punto de equilibrio sea estable es:
0
),...,( 1 <∂
∂
i
mi
NMMF
(3) Para simplificar la notación sean N=(N1,N2,...,Nm) y M=(M1,M2,...,Mm).
XVI Semana Regional de Investigacion y Docencia en Matematicas 47

Si aplicamos el teorema te Taylor a cada una de las funciones F1,F2,…,Fm obtenemos una aproximación a la parte lineal del sistema (1)
∑=
−∂∂
=m
jjj
j
imi MN
NF
NNF1
1 )(),...,( (4)
Si sustituimos esto en la ecuación (1) obtenemos
)(1
jj
m
j j
iii MN
NFNN −
∂∂
= ∑=
•
; i=1,2,…,m (5)
Si las derivadas ∂Fi/∂Nj son funciones continuas en una vecindad de M el modelo (1) puede aproximarse en una vecindad de M por las ecuaciones de Lotka-Volterra
)(1
jj
m
j j
iii MN
NFNN −
∂∂
= ∑=
•
(6) )(1
jj
m
jiji MNaN −= ∑
=
Donde j
iij N
MFa∂
∂=
)( , es independiente de N, de (6) la linealización de modelo (1) en una vecindad
de M es:
(7) )(1
jj
m
jiji MNaMN −= ∑
=
•
El modelo de Lotka-Volterra (6) puede dar más información sobre la conducta de modelo (1). Teorema 1 El sistema (1) es globalmente estable en la región A=N | Ni>0 para i=1,2,..., m si existen constantes c1,c2,…,cm tales que
(8) 0),...,,()( 211
<−∑=
m
m
jiiii NNNFMNc
En la región B=N t. q. Ni >0 , para i=1, 2, ..., m; N≠M. El problema al que nos enfrentamos si queremos utilizar el teorema1 es el encontrar el conjunto
de constantes c1, c2,…, cm tales que sea negativa en la región B= N |N)(NV•
i >0, N≠M. Teorema 2 El modelo (1) es globalmente estable en una región factible si el equilibrio M es posible y existen constantes positivas c1,c2,...,cm tales que la matriz (ci∂Fi/∂Nj+cj∂Fj/∂Ni) Es negativa definida en la región N|Ni>0 i=1,2,…,m.
48 XVI Semana Regional de Investigacion y Docencia en Matematicas

Teorema 3 Suponga que existe una matriz constante E=Eij tal que para todo punto posible del modelo (1) satisface la desigualdad ∂Fi/∂Ni ≤ Eij para i = 1, 2,…, m y Eij ≥ ∂Fi/∂Nj para i≠j. Si el modelo tiene un equilibrio factible y todos los menores principales de -E son positivos entonces es globalmente estable en la región. Ejemplo 1
)32( 2111 NNNN +−=•
)321( 2122 NNNN −+=•
El punto de equilibrio es (1,1),buscar las constantes para que se cumpla el teorema (1) implica un gran trabajo Aplicando el teorema 2 la matriz (ci∂Fi/∂Nj+cj∂Fj/∂Ni) es
⎟⎟⎠
⎞⎜⎜⎝
⎛−++−
221
211
6226cccccc
Que es definida negativa en la región N|Ni>0 i=1,2,…,m por lo que este sistema es estable. 2 Interacción entre dos especies El modelo de Lotka-Volterra de mutualismo para dos especies es: N1´=N1[k1+a11N1+a12N2]
N2´=N2[k2+a21N1+a22N2] (9) Donde a12≥0 y a21≥0 para cumplir las condiciones de mutualismo. El equilibrio no trivial de este sistema es la solución del sistema de ecuaciones k1+a11N1+a12N2=0 k2+a21N1+a22N2=0 Las soluciones de este sistema son N1=(a22k1-a12k2) )/(a11a22-a21a12) N2=(a11k2-a21k1)/ (a11a22-a21a12) Y los puntos críticos del sistema son (0,0), (-k1/a11,0), (0,- -k2/a22),
),(22112112
211
22112112
121
22112112
212
22112112
122
aaaaka
aaaaka
aaaaka
aaaaka
−+
−−+
−
XVI Semana Regional de Investigacion y Docencia en Matematicas 49

Donde el punto (–k1/a11, 0) representa la extinción de la segunda especie, el punto (0, -k2/a22) representa la extinción de la primera especie, el origen la extinción de ambas especies, el otro punto representa un equilibrio entre ambas especies. Si denotamos por (M1,M2) los puntos de equilibrio no trivial del sistema (9) entonces tenemos que si M1 < 0 ó M2 < 0 el sistema (9) es inestable en la región (N1,N2) t. q. N1>0,N2>0. La linealización del sistema (9) en una vecindad de (M1,M2) es:
x1’=M1a11x1+M2a12x2 x2’=M2a21x1+M2a22x2 (10)
donde x1=N1-M1, x2=N2-M2. Aplicando el criterio de Routh Hurwitz encontramos las siguientes condiciones necesarias y suficientes para la estabilidad
M1a11+ M2a22 < 0 y det(Miaij) > 0 (11) Tenemos entonces
Det(Miaij)=M1M2(a11a22-a12a21) (12) Como M1>0, M2>0, a12>0, a21>0, la condición (11) solo puede satisfacerse si a11 y a22 son ambos no cero y del mismo signo. Por (10) se sigue que a11<0 y a22<0 Las condiciones (11) implican que det A = a11a22-a12a21>0 3 El modelo general de Lotka-Volterra de mutualismo El modelo de Lotka-Volterra es ; i= 1,2,...,m (13) )(
1j
m
jijiii NakNN ∑
=
•
+=
Este describe la interacción entre m especies. Aquí aij ≥0 cuando i≠j. En este tipo de modelos la estabilidad local implica la estabilidad global. Teorema 4 Una condición necesaria y suficiente para la estabilidad global del equilibrio no trivial de (13) es que todos los menores principales de –A sean positivos. Ejemplo 2 Consideremos el modelo de mutualismo entre tres especies N1´=N1(0.5- 2N1 + 0.5N2 +0.5N3) N2´=N2(-3 + 5N1 - 4N2 + 2N3) N3´=N3(4 + N1 + 2N2 - 7N3)
50 XVI Semana Regional de Investigacion y Docencia en Matematicas

El equilibrio no trivial es en (1,1,1).Si A denota la matriz de interacción todos los menores principales de –A son positivos. Por el teorema 4 el modelo es globalmente estable. Si C=diag(5,1,1)
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−
−=+
1445.348105.31020
CACA T esta matriz es definida negativa lo que confirma que este sistema
es estable. Bibliografía 1. Goh, B. S. Stability in models of mutualism (1979)Am. Nat. Vol 113 No.2: 261-275 2. Goh, B. S. Global stability in many species systems (1977)Am. Nat. Vol 111: 135-143 3. E. Raymond H.; David C. Culver; Andrew J. Beattie, Models of some ant plant mutualism
(1980)Am. Nat. Vol 116 No 3:346-361 4. Perko Lawrence: Differential Equations and Dynamical systems second edition(1996),
Springer 5. Boucher, Douglas H.: The biology of mutualism(1985) Oxford University Press
XVI Semana Regional de Investigacion y Docencia en Matematicas 51

Nivel Superior
EL METODO DE CORRECCION DE LA CAPA LIMITE PARAPROBLEMAS CON PERTURBACIONES SINGULARES
Rodrigo Gonzalez [email protected]
Departamento de Matematicas, Universidad de Sonora
Resumen
El objetivo principal del presente trabajo es describir de forma general las ideas basicasde fondo de un metodo asintotico efectivo en la determinacion de soluciones de proble-mas gobernados por ecuaciones diferenciales que involucran perturbaciones singulares,frecuentemente utilizados como modelos matematicos para describir procesos naturalesque surgen en la investigacion de problemas aplicados de la ciencia y la tecnologıa:el “Metodo de Funciones Limıtrofes”, conocido tambien como “Metodo de Correccionde la Capa Lımite”. Aun cuando el enfoque de este metodo no es universal, es posibleaproximar asintoticamente la solucion en una forma que permite obtener explıcitamenteel termino residual. El proposito, al introducir este tipo de herramienta, es motivar elinteres por el estudio de tecnicas sofisticadas de las Matematicas Aplicadas.
1. Ideas Basicas sobre el Algoritmo Asintotico
Muchos procesos naturales se describen por medio de modelos matematicos, en especıficoecuaciones diferenciales, que en cierto grado son aproximados, ya que algunas veces nose capturan adecuadamente las caracterısticas dominantes del problema real bajo estudio.Por consiguiente, es natural analizar la influencia de los terminos “omitidos”, considerandoun modelo extendido mas complicado que los incluya, mediante la introduccion de terminosque contienen pequenos parametros, y determinar entonces que tan cercanas son las respec-tivas soluciones de los modelos extendido y simplificado. Los terminos que involucran a lospequenos parametros se llaman perturbaciones, las cuales se clasifican formalmente en dosclases: regulares y singulares, difiriendo el concepto cualitativamente en que perturbacionesregulares llevan a cambios pequenos de la solucion respecto a la del problema no perturbado,mientras que perturbaciones singulares, aun cuando sean pequenas en algun sentido, causancambios considerables en la solucion, por lo menos en alguna parte del dominio considerado.Ası, para analizar el problema de perturbacion, se considera
el problema extendido o perturbado, Pε : L0u+ εLεu = f0 + εfεy el problema simplificado o sin perturbar, P0 : L0u = f0,
(1.1)
donde L0 y Lε son operadores dados (diferenciales en este caso), f0 y fε son funciones conoci-das, ε > 0 es un parametro escalar pequeno y u es la funcion desconocida o incognita, la cualdepende de la variable x (posiblemente n-dimensional). Ademas, se consideran condicionesiniciales y/o de frontera, que tambien pueden contener perturbaciones.
52 XVI Semana Regional de Investigacion y Docencia en Matematicas

La solucion de P0 se denota por u0(x) y la solucion respectiva de Pε por uε(x), parax ∈ D, donde D es algun dominio especıfico. La pregunta fundamental en la Teorıa dePerturbaciones es ¿‖uε(x)− u0(x)‖ → 0 cuando ε→ 0, para alguna norma apropiada ‖ · ‖?(Usualmente, se utiliza la norma euclideana como crıterio de comparacion).
Definicion 1.1: El problema Pε se dice ser regularmente perturbado (RP), en un dominiodado D, si sup
D‖uε(x)− u0(x)‖ → 0, cuando ε→ 0. De otra forma, el problema Pε se llama
singularmente perturbado (SP).
Ejemplo 1: a) Pε :du
dx= −u+ εx, x ∈ [0, 1],
u(0) = 1,es RP.
-
6
0
u
1
1 x
u0(x)uε(x)
uε(x) = (1+ε)e−x+ε(x−1), u0(x) = e−x,
(supx∈[0,1]
‖uε(x) − u0(x)‖ = εe−1 → 0, cuando ε→ 0
).
En general, Pε :du
dx= f(x, u, ε), 0 ≤ x ≤ x0, f - funcion vectorial lo suficientemente suave,
u(0) = u0,es RP.
b) Pε : εdu
dx= −u+ x, x ∈ [0, 1],
u(0) = 1,es SP.
-
6
..
..
..
0
u
1
1
xδ
uε(x) = (1 + ε)e−x/ε + x− ε, u0(x) = x,(
supx∈[0,1]
‖uε(x) − u0(x)‖ = maxx∈[0,1]
|(1 + ε)e−x/ε − ε| = 1
).
u0(x)
uε(x)
Caracterısticas Distintivas de un Problema SP: i) Pε se reduce a una ecuacion degenerada (por loregular algebraıca) o en un “caso crıtico”(con una variedad de soluciones del tipo estructura contrastante).
ii) u0 no es cercana a uε sobre una region determinada (una δ-vecindad pequena del punto inicial o algunotro punto interno), pero en su complemento u0 es lo suficientemente cercana a uε. La δ-region donde sucedeel cambio mas drastico entre u0(x) y uε(x) se denomina capa lımite (o capa interna, segun sea el caso).
iii) Ejemplos tıpicos de problemas SP son ecuaciones diferenciales cuyas derivadas de orden mas grande estanmultiplicadas por pequenos parametros, casos para los cuales el fenomeno de la capa lımite tiene lugar.
XVI Semana Regional de Investigacion y Docencia en Matematicas 53

Ejemplo 2: a) Problema de Valor Inicial (PVI) para el Sistema de Ecuaciones DiferencialesOrdinarias (ODE’s) Perturbado
Pµ : µdz
dt= F (t, z, y, µ),
dy
dt= f(t, z, y, µ),
z(0, µ) = z0, y(0, µ) = y0,
donde µ > 0 es un parametro pequenoz, z, y son funciones vectoriales de dimensionesM y m, respectivamente, F, f son funciones de clase C1(D), en el dominio de definicionD = (t, z, y) | 0 ≤ t ≤ T, ‖z‖ ≤ a, ‖y‖ ≤ a.
b) Problema de Dirichlet para la Ecuacion Diferencial Parcial (EDP) Elıptica
Pε :
ε2 ∆u− k2 u = f(x, ε), x ∈ Ωu|∂Ω = u0(x),
donde ∆ =
n∑
i=1
∂2/∂x2i es el operador de Laplace y Ω es un dominio acotado en RI n con
frontera ∂Ω y k = k(x). Es importante senalar que aun cuando todavıa no se tiene a la manoun metodo de solucion para un problema perturbado, en el Ejemplo 2b) es a priori evidenteque uε(x) no es cercana a u0(x), ya que al menos en las proximidades de la frontera ∂Ω,uε|∂Ω = u0(x), pero en general u0 no necesariamente satisface esta condicion, lo cual originala formacion de una capa lımite.
La idea es construir una aproximacion para uε(x) valida tanto fuera como dentro de lacapa lımite, la cual sea una aproximacion uniforme en el dominio completo, con caracterasintotico. A continuacion se bosqueja a grandes rasgos un procedimiento para obtener unaaproximacion asintotica uniforme para uε(x).
Definicion 1.2: Sea uε(x) una solucion del problema Pε, definida en un dominio D, y seaU(x, ε) una funcion definida en D1 ⊆ D. Entonces, U(x, ε) se llama aproximacion asintoticade uε(x) en el subdominio D1 si
supx∈D1
‖uε(x) − U(x, ε)‖ → 0 cuando ε→ 0.
Ademas, si supx∈D1
‖uε(x) − U(x, ε)‖ = O(εk), entonces la aproximacion asintotica tiene una
exactitud de orden εk (la notacion simbolica α(ε) = O(εk) significa que existe c > 0 tal que‖α(ε)‖ ≤ cεk para 0 < ε < ε0. Tambien, se utiliza la notacion simbolica α(ε) = o(εk),para establecer que lim
ε→0‖α(ε)‖/εk = 0).
zNotacion seguida en los artıculos originales de A. N. Tikhonov, reconocido Fısico-Matematico Ruso,fundador entre otras actividades importantes del grupo especialista en parametros pequenos de la Facultadde Fısica de la Universidad Estatal de Moscu, M.V. Lomonosov.
54 XVI Semana Regional de Investigacion y Docencia en Matematicas

La construccion de U(x, ε) algunas veces es posible hacerla con la ayuda de problemas massimples. Por otra parte, una aproximacion asintotica proporciona una idea aceptable acercadel comportamiento cualitativo de la solucion y por ejemplo podrıa complementar de formaeficiente a un posible esquema numerico aplicableF.
Usualmente, la serie de potencias en ε,∞∑
k=0
εkuk(x, ε), que proporciona la aproximacion
asintotica uniforme (donde las uk’s son funciones acotadas) se construye de tal forma que la
n-esima suma parcial Un(x, ε) =
n∑
k=0
εkuk(x, ε) aproxime asintoticamente a la solucion uε(x)
con una exactitud de orden εn+1 en un dominio D (i.e., supD
‖uε(x)−Un(x, ε)‖ = O(εn+1)).
Tal serie es llamada la expansion asintotica para uε(x) en el dominio D cuando ε→ 0. De aquıen adelante se referira a esta serie como la solucion asintotica para el problema perturbado,la cual se obtiene con un algoritmo que permite determinar varios de los primeros terminosde la serie, ası como su residuo.
Para el caso de un problema RP de la forma
Pε :dx
dt= f(t, x, ε), 0 ≤ t ≤ T, x(t, ε)− una funcion vectorial m-dimensional,
x(0, ε) = x0,
la solucion x(t, ε) es unica (Teorema Clasico de la Teorıa de ODE’s) para ε > 0 lo suficien-
temente pequeno y la serie∞∑
k=0
εkxk(t) es la expansion asintotica para x(t, ε) en el intervalo
0 ≤ t ≤ T . Es decir, sup0≤t≤T
‖x(t, ε)−n∑
k=0
εkxk(t)‖ = O(εn+1).
En el caso de problemas SP, la expansion asintotica para uε(x) en el dominio D tiene laforma
U(x, ε) =∞∑
k=0
εk [uk(x) + Πk(ξ)] , (1.2)
la cual consiste de dos tipos de serie: una serie de potencias en ε, similar al caso regular, concoeficientes dependiendo unicamente de x. La otra parte, una serie de potencias en ε concoeficientes dependiendo de una nueva variable ξ = Ψ(x), una transformacion de coordenadas(locales) definida en una vecindad de la frontera ∂D. A la segunda serie se le refiere comola parte correspondiente a la capa lımite y a los terminos Πk se les denomina “funcioneslimıtrofes” o correctores de la capa lımite.
FLos metodos numericos estandar ciertamente no funcionan con exactitud cuando ε es pequeno,dificultad que se presenta debido a los cambios tan pronunciados que tiene la solucion uε(x) sobre la capalımite.
XVI Semana Regional de Investigacion y Docencia en Matematicas 55

Un ejemplo elemental de problemas SP es considerar el PVI para la EDO escalar
Pµ : µdx
dt= −ax+ f(t), x(0, µ) = 0, 0 ≤ t ≤ T,
donde µ > 0 es un parametro pequeno, a = constante > 0 y f una funcion real infinitamentediferenciable. En este caso, la solucion exacta es
x(t, µ) =
∫ t
0
1
µe−
aµ
(t−s)f(s) ds.
Integrando por partes repetidas veces, se obtiene
x(t, ε) =n∑
k=0
µk [xk(t) + Πk(τ )] +O(µn+1),
donde x0(t) =f(t)
a= solucion del problema P0, x1(t) = −1
a
dx0
dt= −f
′(t)
a, · · · ,
xk(t) = −1
a
dxk−1
dt=
(−1)kf (k)(t)
ak+1, · · · y Πk(τ ) = −xk(0) e−aτ , con τ = t/µ una nueva
variable que representa al “tiempo contraıdo” y satisface Πk(0) = −xk(0). Ası, la expansionasintotica para la solucion del problema perturbado tiene la forma
x(t, µ) =∞∑
k=0
µk [xk(t) + Πk(τ )] .
Nota: i) x(0, µ) = 0.
ii) Los correctores Πk(τ ) decaen exponencialmente cuando τ se incrementa: son importantes unicamente enuna vecindad del punto inicial t = 0 (en la capa lımite). Para t ≥ δ (donde δ es un numero positivo fijoarbitrariamente pequeno), Πk(τ ) → 0 cuando µ → 0 mas rapido que cualquier potencia de µ. De hecho,para t ≥ δ, e−aτ = e−
atµ ≤ e−
aδµ = O(µN ) para cualquier entero positivo N .
iii) A diferencia de un problema RP, la solucion x0(t) del problema no perturbado P0 (termino principal dela serie regular) es una aproximacion asintotica para la solucion x(t, µ) del problema perturbado Pµ no en elintervalo completo 0 ≤ t ≤ T , sino fuera de la capa lımite. Para obtener la aproximacion asintotica en todoel dominio, se debe sumar el termino corrector Π0(τ ) y ası sup
0≤t≤T‖x(t, µ)− x0(t) − Π0(τ )‖ = O(µ). Esto es,
x0(t) + Π0(τ ) proporciona la aproximacion asintotica uniforme para x(t, µ) con una exactitud de orden µ.
iv) En el caso de ecuaciones diferenciales SP, frecuentemente deben imponerse condiciones especiales paratener aproximaciones asintoticas uniformes. En este ejemplo concreto es necesario asumir que a > 0.
v) El algoritmo asintotico del Metodo de Correccion para el caso mas general presentado en el Ejemplo 2a),ampliamente estudiado por el grupo especialista en parametros pequenos de la Facultad de Fısica de laUniversidad Estatal de Moscu, M.V. Lomonosov, bajo el liderazgo del Profesor Valentin F. Butuzov, discıpuloprincipal de la Profesora Adelaida B. Vasil’eva, a su vez heredera academica del Profesor Andreii N. Tikhonov,es realmente interesante, por todas las implicaciones que posee, sobre todo en lo que a casos crıticos ygeneracion de estructuras contrastantes se refiere, ası como la amplia gama de aplicaciones reales relacionadas.Las referencias para un mayor detalle de estos problemas pueden encontrarse principalmente en artıculos derevistas especializadas en el area, algunas de las cuales se incluyen al final del presente trabajo.
56 XVI Semana Regional de Investigacion y Docencia en Matematicas

2. Un Ejemplo Concreto de Ecuaciones Diferenciales Parciales
El algoritmo asintotico descrito en la Seccion 1 para EDO’s SP, se puede extender a problemasde EDP’s lineales con parametros pequenos multiplicando a las derivadas de mayor orden.El enfoque correspondiente se conoce en la literatura como el Metodo de Vishik-Lyusternik.En esta parte se ilustra la idea utilizando un ejemplo simple de ecuacion diferencial parcialdefinida sobre un dominio con frontera suave. En especıfico, considerar la ecuacion elıpticadel Ejemplo 2b) en dos dimensiones
Lεu ≡ ε2∆u− k2(x, y) u = f(x, y, ε), (x, y) ∈ Ω, (2.1)
sujeta a la condicion de frontera de Dirichlet u|∂Ω = 0, asumiendo que ∂Ω es una curvasuave, k y f son funciones suaves y k(x, y) > 0 en Ω = Ω + ∂Ω. Estas condiciones y el signomenos del segundo coeficiente garantizan la existencia de una unica solucion clasica u(x, y, ε).El proposito es construir una expansion asintotica para tal solucion: u = u + Π, con u laparte regular y Π la parte correspondiente a la capa lımite. Para determinar los correctoresde la capa lımite es necesario utilizar nuevas coordenadas (locales) en una vecindad de lafrontera ∂Ω, la cual se puede describir mediante una parametrizacion positiva
x = ϕ(`), y = ψ(`), 0 ≤ ` ≤ `0.
En una δ-vecindad de la frontera se introducen las nuevas variables de la siguiente manera:sea M(x, y) ∈ Ω sobre la normal a ∂Ω que pasa por M ′(ϕ(`), ψ(`)) y sea r = d(M,M ′).El par (r, `) representa las nuevas variables, de tal forma que en una δ-vecindad de ∂Ω existeuna correspondencia 1-1 entre la region (r, `) | 0 ≤ r ≤ δ, 0 ≤ ` ≤ `0 y la descrita por(x, y), expresada por
δ
M ′(ϕ(`),ψ(`))
••M(x,y)
∂Ω
x = ϕ(`) − rψ′(`)√
ϕ′2(`) + ψ′2(`),
y = ψ(`) + rϕ′(`)√
ϕ′2(`) + ψ′2(`).
(2.2)
En las nuevas variables, el operador Lε tiene la representacion
Lε = ε2
(∂2
∂r2+ α(r, `)
∂2
∂`2+ β(r, `)
∂
∂r+ γ(r, `)
∂
∂`
)− k2(x(r, `), y(r, `)),
donde α = (∂l/∂x)2 + (∂l/∂y)2, β = ∂2r/∂x2 + ∂2r/∂y2 y γ = ∂2l/∂x2 + ∂2l/∂y2.
Ahora, estrechando el “radio” (r = ερ) y expandiendo los coeficientes en la expresion paraLε en potencias de ε, se obtiene
Lε =
(∂2
∂ρ2− k2(`)
)+
∞∑
j=1
εj Lj ,
con k2(`) = k2(ϕ(`), ψ(`)) y Lj operadores diferenciales que contienen diferenciaciones∂/∂ρ, ∂/∂` y ∂2/∂`2.
XVI Semana Regional de Investigacion y Docencia en Matematicas 57

La expansion asintotica esta dada por
u(x, y, ε) = u+ Π =
∞∑
i=0
εi [ui(x, y) + Πi(ρ, `)] . (2.3)
Sustituyendo la serie (2.3) en la ecuacion (2.1) y expandiendo f(x, y, ε) en Serie de Taylor,se tiene
ε2∆− k2(x, y)
∞∑
i=0
εi ui(x, y) +
(∂2
∂ρ2− k2(`)
)+
∞∑
j=1
εj Lj
·
·∞∑
i=0
εi Πi(ρ, `) =
∞∑
i=0
εi fi(x, y)
(2.4)
y ∞∑
i=0
εi [ui(`) + Πi(ρ, `)] = 0, (2.5)
donde ui(`) = ui(ϕ(`), ψ(`)). Igualando coeficientes de potencias similares de ε en (2.4),por separado para terminos dependiendo de (x, y) y de (ρ, `), se obtienen las ecuaciones quedeterminan a los coeficientes de la serie asintotica (2.3). Para los terminos regulares de laexpansion asintotica, se obtiene
−k2(x, y) u0 = f0(x, y), −k2(x, y) u1 = f1(x, y),∆ui−2 − k2(x, y) ui = fi(x, y), i = 2, 3, · · · ,
de donde,
u0 = −f0(x, y)/k2(x, y), u1 = −f1(x, y)/k
2(x, y),ui = − [fi(x, y)− ∆ui−2] /k
2(x, y), i = 2, 3, · · · .En general, la parte regular no satisface la condicion de frontera dada, lo cual introducecierta discrepancia en el problema. El proposito de los correctores Πk(ρ, `) es compensardicha discrepancia. La relacion (2.5) muestra que los correctores junto con los terminosregulares deben satisfacer la condicion de frontera del problema considerado.
Para determinar los correctores se dispone de las siguientes ecuaciones diferenciales ordinarias(` juega el papel de un parametro)
∂2Πi
∂ρ2− k2(`)Πi = πi(ρ, `), ρ ≥ 0, (2.6)
donde π0 = 0 y πi(ρ, `) = −i∑
j=1
LjΠi−j(ρ, `), i ≥ 1. Por lo tanto, el lado derecho de las
ecuaciones para Πi se expresan recursivamente por medio de Πj con j < i. Las condicionesde frontera en ρ = 0 siguen de (2.5):
Πi(0, `) = −ui(`). (2.7)
Ademas, se requiere que las funciones Π se anulen cuando ρ→ ∞:
Πi(∞, `) = 0. (2.8)
58 XVI Semana Regional de Investigacion y Docencia en Matematicas

Las soluciones explıcitas de (2.6)–(2.8) se determinan recursivamente. Por ejemplo,
Π0(ρ, `) = −u0(`)e−k(`)ρ,
mientras que las otras funciones Πi(ρ, `) son productos de polinomios en ρ y e−k(`)ρ, de talforma que todas las funciones Π poseen la estimacion exponencial |Πi(ρ, `)| ≤ ce−κρ, dondec y κ son constantes positivas apropiadas que, en general, son diferentes para diferentesfunciones Π.
Nota: Aunque las funciones Π formalmente estan definidas para ρ ≥ 0, tienen sentido unicamente en0 ≤ ρ ≤ δ/ε (i.e., en una δ-vecindad de ∂Ω, donde se definen las coordenadas (r, `)). El metodo estandarpara establecer una continuacion suave de estas funciones sobre el dominio completo Ω es multiplicar lasΠk’s construidas por una funcion infinitamente diferenciable Υ(r) tal que Υ(r) = 1 para 0 ≤ r ≤ δ/3,0 ≤ Υ(r) ≤ 1 para δ/3 ≤ r ≤ 2δ/3 y Υ(r) = 0 para r ≥ 2δ/3. Entonces, se considera a Πk(ρ, `)Υ(r) comolas nuevas funciones correctoras, las cuales estan definidas de forma unica en el dominio completo Ω y sonasintoticamente mas pequenas que cualquier potencia de ε para r > δ/3, ya que
|Πi(ρ, `)| ≤ c e−κδ3ε = o(εN ) ∀ N > 0 cuando r ≥ δ/3.
Teorema 2.1. La serie (2.3) es la solucion asintotica del problema (2.1) en el dominiocerrado Ω cuando ε→ 0. Esto es,
maxΩ
|u(x, y, ε)− Un(x, y, ε)| = O(εn+1),
donde Un(x, y, ε) denota la n-esima suma parcial de la serie (2.3):
Un(x, y, ε) =
n∑
i=0
εi [ui(x, y) + Πi(ρ, `)] .
Dem. Sea w(x, y, ε) = u(x, y, ε)−Un(x, y, ε). Sustituyendo u = Un+w en la ecuacion (2.1),se obtiene el siguiente problema de valor en la frontera para el termino residual w:
ε2∆w − k2(x, y) w = h(x, y, ε), (x, y) ∈ Ω,w|∂Ω = 0,
donde h(x, y, ε) = f(x, y, ε)− ε2∆Un + k2(x, y) Un. Sigue del metodo de construccion de Un
que h(x, y, ε) = O(εn+1) en Ω.
Supongamos que (x0, y0) es el punto de Ω donde w(x, y, ε) alcanza su maximo valor.Entonces, ∆w < 0 en tal punto y la ecuacion para w implica que
w(x0, y0, ε) ≤h(x0, y0, ε)
k2(x0, y0)= O(εn+1).
Similarmente, si (x1, y1) es el punto de Ω donde w(x, y, ε) alcanza su mınimo valor, entonces
|w(x1, y1, ε)| ≤h(x1, y1, ε)
k2(x1, y1)= O(εn+1).
Por lo tanto, se concluye que
maxΩ
|w(x, y, ε)| = maxΩ
|u− Un| = O(εn+1).
XVI Semana Regional de Investigacion y Docencia en Matematicas 59

Por ejemplo, si en particular se toma k2(x, y) = 1+x2, f(x, y) = −x y Ω = (x, y) | x2+y2 ≤ 1. Entonces,las ecuaciones parametricas que describen a ∂Ω son x = cos `, y = sen `, 0 ≤ ` ≤ 2π, u0(x, y) =
x
1 + x2
y Π0(ρ, `) = − cos `
1 + cos2 `e−
√1+cos2 ` ρ, donde ρ = r/ε. Las relaciones entre (x, y) y (r, `) estan dadas
por x = (1 − r) cos `, y = (1 − r)sen ` y ası r = 1 −√
x2 + y2, ` = cos−1(x/
√x2 + y2
). Ademas,
u1(x, y) = 0 y determinar el corrector Π1(ρ, `) es relativamente simple a partir de la ecuacion ordinaria (2.6).A continuacion se ilustra la aproximacion asintotica del problema perturbado considerado con una exactitudde orden ε2.
Conclusion: i) Es importante senalar que aun para este problema tan simple es practicamente imposibleencontrar la solucion exacta explıcitamente, mientras que la aproximacion asintotica de la solucion puededeterminarse facilmente con cualquier orden de exactitud deseado.
ii) El Metodo de Vishik-Lyusternik puede aplicarse no unicamente a EDP’s elıpticas, sino tambien aecuaciones parabolicas e hiperbolicas, ası como tambien a ciertos problemas no lineales. Sin embargo,la geometrıa de la frontera del dominio de interes es determinante. Tal es el caso cuando ∂Ω contieneesquinas (regiones rectangulares por ejemplo), donde los correctores construidos en la forma planteada noson suficientes para describir el comportamiento asintotico de la solucion. Es necesario entonces introducir unnuevo tipo de correctores “correctores de esquina”, ası como algun procedimiento adecuado de regularizacionpara algunos de los terminos de la expansion asintotica para los casos crıticos de problemas que surgenprincipalmente en la aplicacion.
3. Descripcion de Algunos Problemas Aplicados
La disponibilidad de espacio unicamente permite describir de forma general las posiblesaplicaciones del Metodo de Correccion en problemas con soluciones caracterizadas por lapresencia de capas de transicion internas y de frontera.
a) Problemas de Control Optimo, formulados en terminos de ecuaciones singularmenteperturbadas. Por ejemplo, optimizar algun funcional
Iε = ϕ(y(T ), z(T )) +
∫ T
0
F (t, y, z, u) dt
a lo largo de las trayectorias de un sistema de control
y = f(t, y, z, u, ε)ε z = g(t, y, z, u, ε)y(0, ε) = y0, z(0, ε) = z0, y ∈ RI m, z ∈ RI n.
60 XVI Semana Regional de Investigacion y Docencia en Matematicas

b) El Metodo de Correccion tambien es efectivo en la solucion de problemas de disenode dispositivos semiconductores y solucion de problemas de movimiento de cuerposrıgidos bajo influencias hidro- y/o electro- dinamicas.
c) Las soluciones asintoticas son de fundamental importancia cuando se utilizan comoprimera iteracion en metodos numericos aplicados a problemas mal planteados y aproblemas inversos.
d) El Metodo de Correccion de la Capa Lımite ha sido usado exitosamente en la solucionde algunos problemas de aerodinamica, epidemias, oscilaciones acusticas en un mediocon viscosidad pequena con o sin resonancia, en problemas de Cinetica Quımica yCombustion, conduccion de calor y transferencia de masa en cuerpos extremadamentedelgados, Biologıa Matematica, entre otros.
Referencias
1. Bugoliubov N. & Mitropolskii Y. A. Asymptotic Methods in the Theory of Nonlinear Osillations.Hindustan Publications, Co., 1961.
2. Butuzov V. F. Corner Boundary Layers in Singularly Perturbed Problems for Partial DiferentialEquations. Journal of Differential Equations 15 (1979), pp. 1318-1328.
3. Butuzov V. F. & Kalachev L. V. Asymptotic Approximation of the Solution of a Boundary ValueProblem for Singularly Perturbed System of Parabolic Equations in the Critical Case.Mathematical Notes 38 (1986), pp. 819-831.
4. Butuzov V. F. & Nesterov A. S. On some Singularly Perturbed Problems with NonsmoothBoundary Functions. Soviet Math. Dokl. 25 (1982), pp. 420-423.
5. Kevorkian J. & Cole J. D. Singular Perturbation Methods in Applied Mathematics.Springer Verlag, 1981.
6. Simmonds J. G. & Mann J. E. A First Look at Perturbation Theory. Dover Publications, 1998.
7. Tikhonov A. N. & Samarskii A. A. Equations of Mathematical Physics. Dover Publications, 1990.
8. Vasil’eva A. B. & Butuzov V. F. Asymptotic Expansions of the Solutions of Singularly PerturbedDifferential Equations. Springer-Verlag, 1983.
9. Vishik M. Asymptotic Behavior of Solutions of Evolutionary Equations.Cambridge University Press, 1992.
XVI Semana Regional de Investigacion y Docencia en Matematicas 61

CONTRIBUCION AL ESTUDIO DE LA CURVA DE SORCIÓN DE IODO EN FIBRAS SINTÉTICAS .
Gabriel Guillén, Ana María Islas
Instituto Politécnico Nacional ESIT. SIBE-IPN, EDI-IPN.
Manuel Olvera, Laura E. Mercado Instituto Politécnico Nacional, ESIT.
RESUMEN En trabajos previos5,6 parametrizaron la curva clásica que se obtiene del ensayo de sorción en fibras de poliéster usando un modelo sigmoidal resuelto por el algoritmo de Guggenheim y la técnica de los tres puntos de apoyo de Lipka, ambas técnicas arrojaron un ajuste que aunque adecuado en la parte final observaba una desviación con relación a la curva experimental. En este trabajo dicha curva es ajustada a un modelo sigmoidal utilizando la técnica de mínimos cuadrados y un modelo modificado con un término dependiente cuadrático evaluado por el método de Gauss-Newton. Los resultados del modelo modificado son excelentes y sus constantes numéricas parecen corresponder a las inversas de la temperatura del ensayo.
1. INTRODUCCIÓN La sorción de iodo es un parámetro de la micro estructura propuesto por Schwertaseek1 para evaluar indirectamente el volumen libre4 de las fibras celulósicas. Las mismas condiciones del ensayo condujeron a sorciones muy bajas en el caso de las fibras de poliéster, ya que el medio acuoso, hinchante de las fibras celulósicas, no actúan como tal cuando se trata de aquéllas. Sladecek2 observó que la sorción resultaba muy favorecida cuando se realizaba en un medio que contenía fenol, el cual actúa como medio hinchante del poliéster, del mismo modo que lo hace el agua por si misma cuando se trata de fibras celulósicas. Lacko & Gaansky3 estudiaron con detalle la influencia de las variables del ensayo de sorción de iodo en el poliéster (concentración del fenol e iodo, duración del ensayo) y también de que manera la sorción es influenciada por la estructura de la fibra. Gacén y Maillo4 consideraron interesante conocer la variación de sorción de iodo en función de la temperatura del ensayo, con la intención de conocer indirectamente la evolución del volumen libre de la fibra4. Ello permite distinguir con mayor precisión entre muestras de las que se desee conocer si existen diferencias en su micro estructura, las cuales por otra parte, pueden conducir a diferentes absorciones de colorante en un proceso tintóreo o a comportamientos irregulares o insatisfactorios en su procesado o inclusive a lo largo de su uso. De acuerdo a referencias consultadas existen trabajos previos5,6, relacionado a la parametrización de la curva del ensayo de sorción de iodo, con resultados alentadores. En este trabajo se continúa este mismo aspecto pero utilizando técnicas de ajuste más robustas.
62 XVI Semana Regional de Investigacion y Docencia en Matematicas

2. PARTE EXPERIMENTAL En la tabla siguiente se muestran los datos experimentales de publicados por Gacén y Maillo4 obtenidos del ensayo de sorción de iodo en fibras de poliéster en función de la temperatura de ensayo.
Tabla 1.- Valores experimentales del ensayo de sorción de iodo Temperatura de
ensayo (ºC) Sorción de iodo
(mg I2/g) 20 10.60 25 15.30 30 22.80 35 35.60 40 52.00 45 74.50 50 90.10 55 86.70
Los datos de al tabla anterior se ajustaron a un modelo sigmoidal, primero utilizando la técnica conocida como mínimos cuadrados, y posteriormente se utilizó un modelo sigmoidal modificado que es resuelto por el método de Gauss-Newton La técnica de mínimos cuadrados
En este apartado se aplica la técnica de mínimos cuadrados para ajustar una sogmoide sobre la curva de sorción de iodo
[ ][ ]2
121 )*exp(*exp*∑
=
−−−=n
iSItkkS α
Resolviendo las ecuaciones normales 021
=∂∂
=∂∂
=∂∂
kS
kSS
α, tenemos:
[ ][ ] [ ][ ]∑=
−−−∂∂
−−−=∂∂ n
iSItkkSItkkS
12121 )*exp(*exp*)*exp(*exp*2 α
αα
α
Cancelando al 2 del lado derecho nos queda:
[ ][ ] [[ ] )1(0)*exp(*exp)*exp(*exp*1
2121 =−−−−−=∂∂ ∑
=
n
itkkSItkkS α
α]
Ahora,
[ ][ ] [ ][ ]∑=
=−−−∂∂
−−−=∂∂ n
iSItkk
kSItkk
kS
121
121
1
0)*exp(*exp*)*exp(*exp*2 αα
[ ][ ] [[ ]∑=
=−−−−−−−=∂∂ n
itktkkSItkk
kS
122121
1
0)*exp(*exp*)*exp(*exp*2 αα ]
[ ][ ] [[ ] )2(0)*exp(*exp*)*exp(*exp*1
221211∑=
=−−−−−−−=∂∂ n
itktkkSItkk
kS αα ]
XVI Semana Regional de Investigacion y Docencia en Matematicas 63

Finalmente, para la tercera variable:
[ ][ ] [ ][ ]∑=
=−−−∂∂
−−−=∂∂ n
iSItkk
kSItkk
kS
121
221
2
0)*exp(*exp*)*exp(*exp*2 αα
[ ][ ] [[ ]∑=
=−−−−−−=∂∂ n
itktkktkSItkk
kS
1221121
2
0)*exp(*exp***)*exp(*exp*2 αα ]
Cancelando al 2 del lado derecho nos queda:
[ ][ ] [[ ] )3(0)*exp(*exp***)*exp(*exp*1
2211212∑=
=−−−−−−=∂∂ n
itktkktkSItkk
kS αα ]
De acuerdo a (1), (2) y (3), este es un sistema de tres ecuaciones no lineales con tres incógnitas (4):
[ ][ ] [ ][ ]
[ ][ ] [ ][ ]
[ ][ ] [[ ]∑
∑
∑
=
=
=
=−−−−−−=∂∂
=−−−−−−−=∂∂
=−−−−−=∂∂
n
i
n
i
n
i
tktkktkSItkkkS
tktkkSItkkkS
tkkSItkkS
1221121
2
122121
1
12121
0)*exp(*exp***)*exp(*exp*
)4(0)*exp(*exp*)*exp(*exp*
0)*exp(*exp)*exp(*exp*
αα
αα
αα
]
Es imposible simplificar más a este sistema no lineal (4). Sin embargo es posible resolverlo por un método iterativo, que en el caso de este trabajo es el método de Newton-Raphson. Para resolver el sistema de tres ecuaciones no lineales con tres incógnitas (4) utilizamos el método de Newton-Raphson que consiste en: Plantear el sistema de tres ecuaciones no lineales con tres incógnitas (4) y calcular el Jacobiano (matriz formada por las derivadas parciales de las funciones del sistema que se aplica con la finalidad de linealizar a este).
321 , fyff
., 321 fyff
⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
2
3
1
33
2
2
1
22
2
1
1
11
kf
kff
kf
kff
kf
kff
α
α
α
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
3
2
1
f
f
f
Se calculó sustituyendo los valores de α , k1 y k2 con un vector solución [ ]02010 ,, kkα , que inicialmente valdrá [ esto por la necesidad de contar con un estimador inicial. Se obtiene un sistema de tres ecuaciones lineales con tres incógnitas que se resolvió por Gauss-Jordán, entonces tenemos un vector solución
]0,0,0
[ ]zyx ,, que sumado al vector solución [ ]02010 ,, kkα conduce a los valores para [ ]zkkykkx +=+=+= 0212011101 ,,αα . Se procedió a calcular la siguiente iteración con los nuevos valores de [ ]12111 ,, kkα hasta que el vector solución fue convergente al sistema de ecuaciones no lineales (4), el proceso iterativo se detuvo al llegar a la distancia mínima (criterio de paro para el proceso iterativo) que se planteó al inicio del proceso. En ocasiones los sistemas no lineales son inconsistentes y si se toma el vector [ como ]0,0,0
64 XVI Semana Regional de Investigacion y Docencia en Matematicas
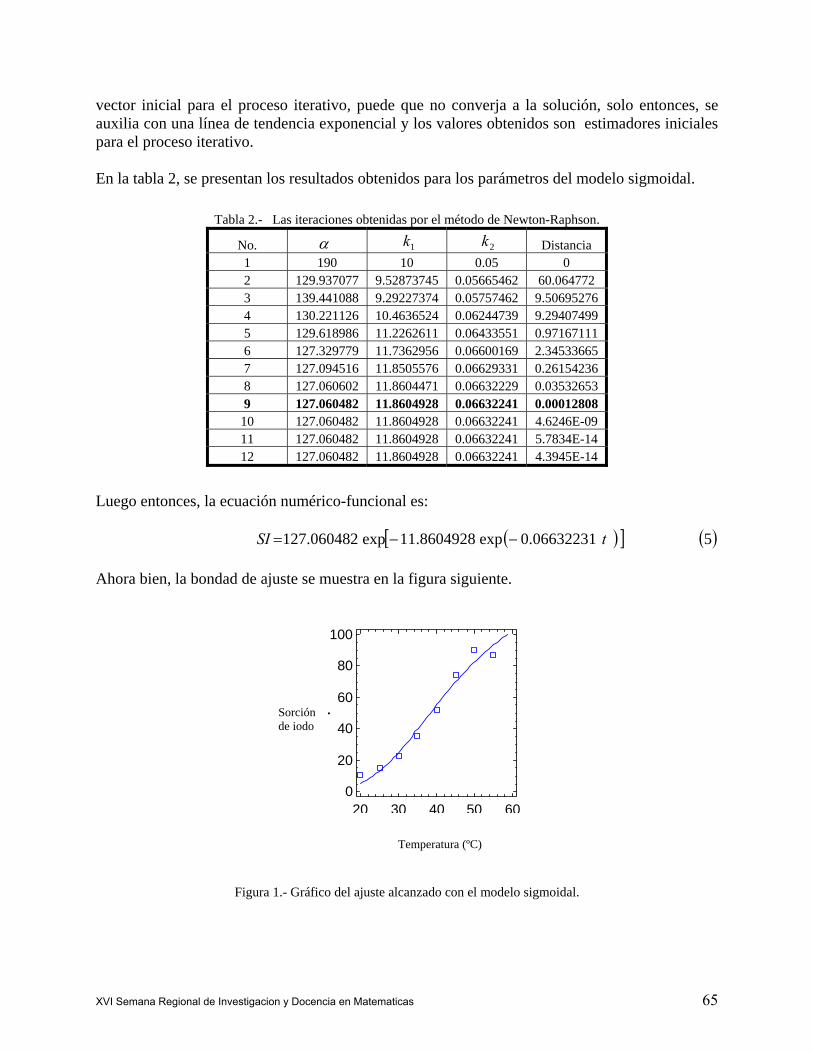
vector inicial para el proceso iterativo, puede que no converja a la solución, solo entonces, se auxilia con una línea de tendencia exponencial y los valores obtenidos son estimadores iniciales para el proceso iterativo. En la tabla 2, se presentan los resultados obtenidos para los parámetros del modelo sigmoidal.
Tabla 2.- Las iteraciones obtenidas por el método de Newton-Raphson.
No. α 1k 2k Distancia 1 190 10 0.05 0 2 129.937077 9.52873745 0.05665462 60.064772 3 139.441088 9.29227374 0.05757462 9.50695276 4 130.221126 10.4636524 0.06244739 9.29407499 5 129.618986 11.2262611 0.06433551 0.97167111 6 127.329779 11.7362956 0.06600169 2.34533665 7 127.094516 11.8505576 0.06629331 0.26154236 8 127.060602 11.8604471 0.06632229 0.03532653 9 127.060482 11.8604928 0.06632241 0.00012808
10 127.060482 11.8604928 0.06632241 4.6246E-09 11 127.060482 11.8604928 0.06632241 5.7834E-14 12 127.060482 11.8604928 0.06632241 4.3945E-14
Luego entonces, la ecuación numérico-funcional es:
( )[ ] ( )506632231.0exp8604928.11exp060482.127 tSI −−= Ahora bien, la bondad de ajuste se muestra en la figura siguiente.
Y
40
60
80
100
Figura
XVI Semana Regional de Investigacio
Sorciónde iodo
20 30 40 50 600
20
Temperatura (ºC)
1.- Gráfico del ajuste alcanzado con el modelo sigmoidal.
n y Docencia en Matematicas 65

Para corregir la desviación del ajuste en la parte final de la curva experimental utilizamos un modelo sigmoidal con un término dependiente cuadrático,
( )6))*exp(**exp(* 22
1 tktkSI −= α y es evaluado a través del método de Gauss-Newton. El método de Gauss-Newton La regresión no-lineal se basa en la determinación de los valores de los parámetros que minimizan la suma de los cuadrados de los residuos. Para este caso la solución se debe de hallar en forma iterativa. El método de Gauss-Newton es un algoritmo para minimizar la suma de los cuadrados de los residuos entre los datos y ecuaciones no lineales. La clave de este método consiste en aproximar a la función no lineal por medio de una serie de Taylor. Primero se establece la relación entre la función no lineal y los datos como:
imii eaaaxfy += ),...,,;( 10 Donde:
iy es el valor medido de la variable dependiente, ),...,,;( 10 mi aaaxf es la ecuación que es una función de la variable independiente y una
función no lineal de los parámetros ix
maaa ,...,, 10
ie es el error aleatorio. Esta función se puede expresar omitiendo los parámetros de la siguiente forma: maaa ,...,, 10
)7()( iii exfy += el modelo no lineal puede ser expandido dentro de una serie de Taylor alrededor de valores de parámetro y reducido después de las primeras derivadas. Para un caso de dos parámetros tenemos:
)8()()(
)()( 11
00
1 aaxf
aaxf
xfxf jijijiji ∆
∂
∂+∆
∂
∂+=+
Donde j son los valores iniciales, j+1= predicción, 0a∆ = jj aa ,01,0 −+ y = . De esta forma se ha linealizado el modelo original con respecto a los parámetros. Las ecuación (8) se puede sustituir en la ecuación (7) para obtener:
1a∆ jj aa ,11,1 −+
)9()()(
)( 11
00
ijiji
jii eaaxf
aaxf
xfy +∆∂
∂+∆
∂
∂=−
o en forma matricial: )10(][ EAZD j +∆=
Donde es la matriz de las derivadas parciales de la función evaluada en el valor inicial j. ][ jZ
66 XVI Semana Regional de Investigacion y Docencia en Matematicas

⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
••••••∂∂
∂∂
∂∂
∂∂
=
10
1
2
0
2
1
1
0
1
][
af
af
af
af
af
af
Z
nn
j
donde n es el número de datos, k
i
af
∂∂
= derivada parcial de la función con respecto al k-esimo
parámetro evaluado en el i-esimo punto. El vector D contiene las diferencias entre las mediciones y los valores de la función.
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−•••
−−
=
)(
)()(
22
11
mm xfy
xfyxfy
D
El vector contiene los cambios en los valores de los parámetros, A∆
⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
∆•••∆∆
=∆
ma
aa
A
1
0
Si se aplica la teoría de mínimos cuadrados lineales a la ecuación (10) resulta en la siguiente ecuación normal:
)11(][]][][[ DZAZZ Tjj
Tj =∆
Así el procedimiento consiste en resolver la ecuación (11) para A∆ , la cual se puede emplear para calcular valores mejorados en:
0,01,0 aaa jj ∆+=+ y 1,11,1 aaa jj ∆+=+
XVI Semana Regional de Investigacion y Docencia en Matematicas 67
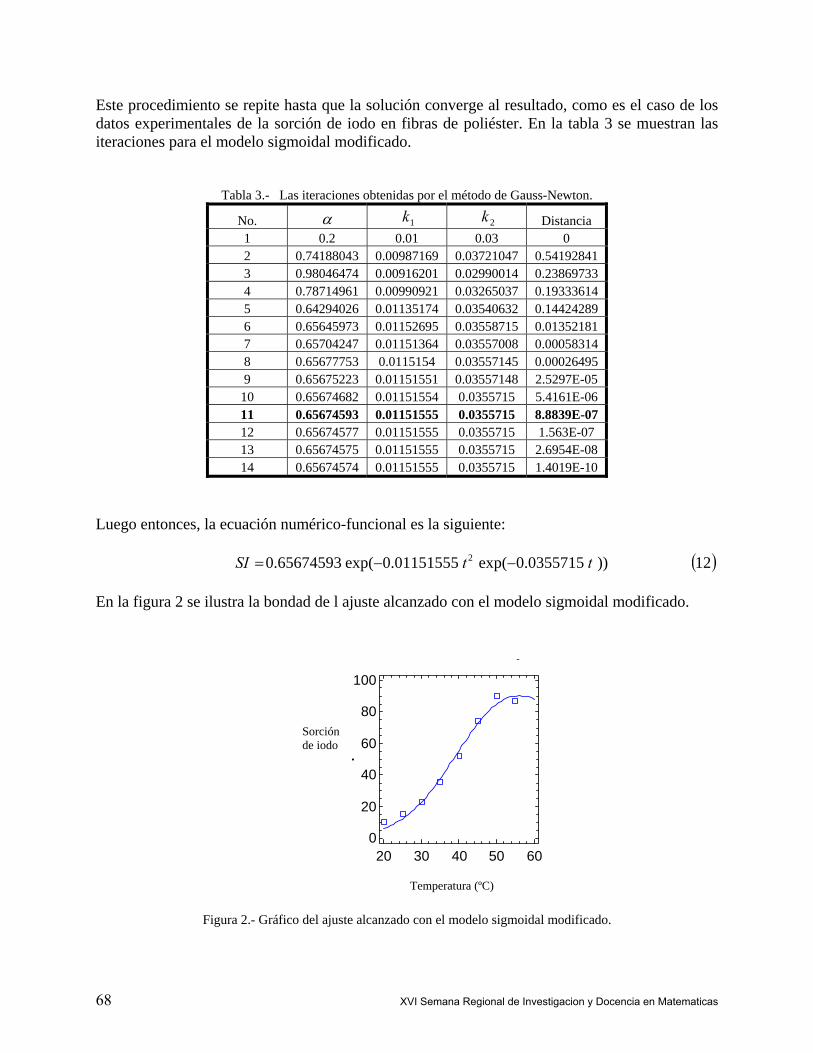
Este procedimiento se repite hasta que la solución converge al resultado, como es el caso de los datos experimentales de la sorción de iodo en fibras de poliéster. En la tabla 3 se muestran las iteraciones para el modelo sigmoidal modificado.
Tabla 3.- Las iteraciones obtenidas por el método de Gauss-Newton.
No. α 1k 2k Distancia 1 0.2 0.01 0.03 0 2 0.74188043 0.00987169 0.03721047 0.54192841 3 0.98046474 0.00916201 0.02990014 0.23869733 4 0.78714961 0.00990921 0.03265037 0.19333614 5 0.64294026 0.01135174 0.03540632 0.14424289 6 0.65645973 0.01152695 0.03558715 0.01352181 7 0.65704247 0.01151364 0.03557008 0.00058314 8 0.65677753 0.0115154 0.03557145 0.00026495 9 0.65675223 0.01151551 0.03557148 2.5297E-05
10 0.65674682 0.01151554 0.0355715 5.4161E-06 11 0.65674593 0.01151555 0.0355715 8.8839E-07 12 0.65674577 0.01151555 0.0355715 1.563E-07 13 0.65674575 0.01151555 0.0355715 2.6954E-08 14 0.65674574 0.01151555 0.0355715 1.4019E-10
Luego entonces, la ecuación numérico-funcional es la siguiente:
( )12))0355715.0exp(01151555.0exp(65674593.0 2 ttSI −−=
En la figura 2 se ilustra la bondad de l ajuste alcanzado con el modelo sigmoidal modificado. j
60
80
100
Figura 2.- Gráfico
68
Sorciónde iodo
20 30 40 50 600
20
40
Y
Temperatura (ºC)
del ajuste alcanzado con el modelo sigmoidal modificado.
XVI Semana Regional de Investigacion y Docencia en Matematicas
3. CONCLUSIONES El documento permite formular las siguientes conclusiones:
• La técnica de los mínimos cuadrados aplicado a los datos experimentales de sorción de iodo para ajustarlos a un modelo sigmoidal conduce a resultados idénticos a los reportados en un trabajo previo utilizando el método de optimización Marquardt.
• El ajuste antes citado observa una desviación en la parte final de la curva experimental de sorción de iodo que sólo es posible mejorar introduciendo un término correctivo.
• El ajuste obtenido a la nube experimental utilizando un modelo modificado es resuelto por el método de Gauss-Newton, sus resultados son sensiblemente adecuados en la parte final de la curva experimental.
• En necesario continuar el estudio de modelos ajustados a la curva de sorción de iodo, pero por los resultados mostrados en el modelo modificado, sus constantes numéricas parecen ser inversas de la temperatura de ensayo.
BIBLIOGRAFIA
1. Schwertaseek, (1959), Faserforchun und Textiltechnik, 10, pág. 389. 2. Sladecek, Uveroflentlicher Berichtans den Wolforschungins titud in Born. 3. Lacko, Galanski, (1972), Textila, Noviembre, pág,. 47. 4. Gacén Maillo, Baixauli, (1980), Bull. Scient. ITF, Vol. 9, No. 34, pág. 141. 5. Guillén, Islas, Ruíz, (2004), Revista ContactoS, No. 52, Abril-junio, pág. 51-55. 6. Guillén, Islas, Ruíz, Patiño, (2005), XXXI Simposio de la AEQCT (2005), Barcelona, Spain
XVI Semana Regional de Investigacion y Docencia en Matematicas 69
Nivel Superior
“LOS MÍNIMOS CUADRADOS APLICADOS A
LOS MODELOS DE VANGHELUWE Y ZUREK” Ana María Islas+, Manuel Olvera, Gabriel Guillén+.
+ Instituto Politécnico Nacional, ESIT, SIBE-IPN, EDI-IPN.
RESUMEN La dinámica molecular de los polímeros sujetos a pequeñas deformaciones puede explicarse utilizando modelos construidos a partir de muelles y émbolos. Dos de los modelos más sustentables son los modelos de Vangheluwe1 y Zurek2 cuyas constantes paramétricas se determinan en este trabajo por la técnica de mínimos cuadrados5, que conduce a un sistema de ecuaciones no lineales que se resolvió por el método de Newton-Raphson5. El ajuste de ambos modelos a curvas tenacidad-alargamiento de hilos textiles convencionales fue sensiblemente mejor a los métodos de ajuste ya disponibles.
1. ANTECEDENTES Las fibras textiles a lo largo de la cadena productiva modifican su estructura interna y por ende definen sus propiedades mecánicas y tintóreas. Para estudiar la estructura, es preciso hacer uso de medios indirectos de observación, como la difracción de los electrones, o de los rayos X, la espectrografía Raman, la resonancia magnética nuclear, etc., Asimismo métodos químicos como la porción de iodo, la solubilidad diferencial, etc. Otra alternativa para el estudio de la estructura de las fibras textiles lo constituye la simulación del comportamiento viscoelástico cuando éstas se someten a tensión. Los fundamentos matemáticos de la visco elasticidad fueron establecidos por James C. Maxwell proponiendo el modelo que lleva su nombre. Considera dos elementos ideales, el primero explica la recuperación elástica de los cuerpos sometidos a tracción y está representado por un muelle; mientras que la segunda, la variación de las dimensiones que se producen en el material a lo largo del tiempo, ya sea durante la aplicación del esfuerzo o bien después de cesar el mismo, está relacionado con las tensiones internas acumuladas en el material que se liberan gradualmente y se representa por un émbolo. Uno de los modelos más recientes es el modelo de Vangheluwe1 que está construido por un elemento de Maxwell colocado en paralelo con un muelle no lineal de módulo C. En la figura 1 se representa el modelo de Vangheluwe que relaciona la carga σ y el alargamiento γ por la ecuación (1):
( ) ( )11 2γσ γ CeA B +−= −
donde A es la tenacidad en la fluencia, A = η r, siendo r la razón de deformación; B es la inversa del tiempo de relajación del elemento de Maxwell y la razón de deformación, y C es el módulo del muelle no lineal.
70 XVI Semana Regional de Investigacion y Docencia en Matematicas
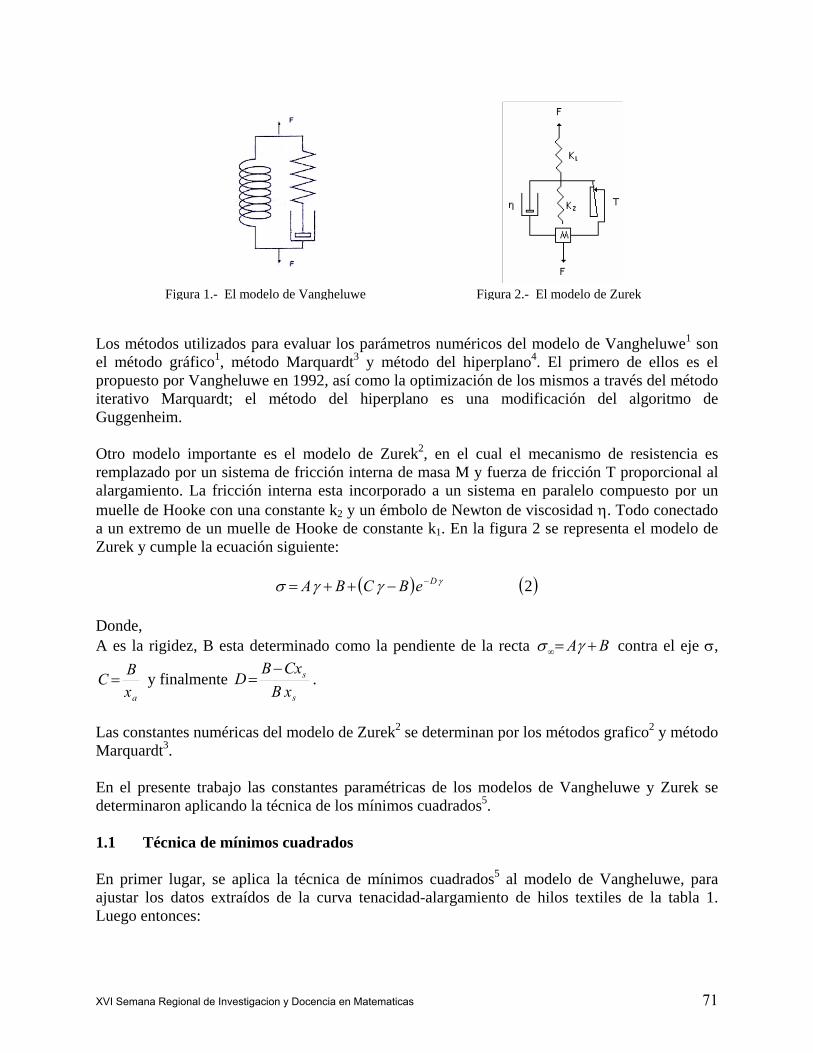
e
Los métodel métodopropuestoiterativo Guggenhe Otro modremplazadalargamiemuelle dea un extreZurek y cu
Donde, A es la ri
axBC = y
Las constaMarquard En el predetermina 1.1 Té En primeajustar loLuego ent
XVI Semana
Figura 1.- El modelo de Vangheluw
os utilizados para evaluar los parámetros numé gráfico1, método Marquardt3 y método del h por Vangheluwe en 1992, así como la optimizacMarquardt; el método del hiperplano es uim.
elo importante es el modelo de Zurek2, en elo por un sistema de fricción interna de masa Mnto. La fricción interna esta incorporado a un s Hooke con una constante k2 y un émbolo de Nemo de un muelle de Hooke de constante k1. En mple la ecuación siguiente:
( ) γγγσ DeBCBA −−++=
gidez, B esta determinado como la pendiente d
finalmente s
s
xBCxB
D−
= .
ntes numéricas del modelo de Zurek2 se determit3.
sente trabajo las constantes paramétricas de losron aplicando la técnica de los mínimos cuadrado
cnica de mínimos cuadrados
r lugar, se aplica la técnica de mínimos cuadras datos extraídos de la curva tenacidad-alargamonces:
Regional de Investigacion y Docencia en Matematicas
Figura 2.- El modelo de Zurek
ricos del modelo de Vangheluwe1 son iperplano4. El primero de ellos es el ión de los mismos a través del método na modificación del algoritmo de
cual el mecanismo de resistencia es y fuerza de fricción T proporcional al istema en paralelo compuesto por un wton de viscosidad η. Todo conectado la figura 2 se representa el modelo de
( )2
e la recta BA +=∞ γσ contra el eje σ,
nan por los métodos grafico2 y método
modelos de Vangheluwe y Zurek se s5.
dos5 al modelo de Vangheluwe, para iento de hilos textiles de la tabla 1.
71

[ ]2
1
2 ))1((∑=
− −+−=n
i
B CeAS σγγ
Resolviendo las ecuaciones normales 0=∂∂
=∂∂
=∂∂
CS
BS
AS ,
Tenemos un sistema de tres ecuaciones no lineales con tres incógnitas indicada a continuación:
[ ]
[ ] ( )
[ ] 0)())1((
30)())1((
0)1())1((
2
1
2
1
2
1
2
=−+−=∂∂
=−+−=∂∂
=−−+−=∂∂
∑
∑
∑
=
−
=
−−
−
=
−
γσγ
γσγ
σγ
γ
γγ
γγ
n
i
B
n
i
BB
Bn
i
B
CeACS
eCeABS
eCeAAS
Es imposible simplificar más a este sistema no lineal. Sin embargo es posible resolverlo por un método iterativo, que en el caso de este trabajo es el método de Newton-Raphson5, que consiste en: Plantear el sistema de tres ecuaciones no lineales con tres incógnitas y calcular el Jacobiano (matriz formada por las derivadas parciales de las funciones del sistema que se aplica con la finalidad de linealizar a este).
( )3, 321 fyff
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
Cf
Bf
Af
Cf
Bf
Af
Cf
Bf
Af
333
222
111
⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢
⎣
⎡
−
−
−
3
2
1
f
f
f
Se calculó sustituyendo los valores de A, B y C con un vector solución , que inicialmente valdrá esto por la necesidad de contar con un estimador inicial
[ ]000 ,, CBA[ 0,0,0 ] 5. Se obtiene
un sistema de tres ecuaciones lineales con tres incógnitas que se resolvió por Gauss-Jordán, entonces tenemos un vector solución [ ]lkh ,, que sumado al vector solución conduce a los valores para [
[ 000 ,, CBA ]]lCCkBBhAA +=+=+= 010101 ,, . Se procedió a calcular la siguiente
iteración con los nuevos valores de [ ]111 ,, CBA hasta que el vector solución fue convergente al sistema de ecuaciones no lineales, el proceso iterativo se detuvo al llegar a la distancia mínima (criterio de paro para el proceso iterativo) que se planteó al inicio del proceso. En ocasiones los sistemas no lineales son inconsistentes y si se toma el vector [ ]0,0,0 como vector inicial para el proceso iterativo, puede que no converja a la solución, solo entonces, se auxilia con una línea de tendencia exponencial y los valores obtenidos son estimadores iniciales para el proceso iterativo. Ahora, aplicando la misma técnica de mínimos cuadrados al modelo de Zurek2, tenemos:
[ ]2
1))((∑
=
− −−++=n
i
DeBCBAS σγγ γ
72 XVI Semana Regional de Investigacion y Docencia en Matematicas

Resolviendo las ecuaciones normales 0=∂∂
=∂∂
=∂∂
=∂∂
DS
CS
BS
AS ,
Obtenemos un sistema de cuatro ecuaciones no lineales con cuatro incógnitas:
[ ]
[ ]
[ ]
[ ] [ ] 0)())((
)4(0)())((
0)1())((
0)())((
1
1
1
1
=−−−++=∂∂
=−−++=∂∂
=−−−++=∂∂
=−−++=∂∂
−
=
−
−
=
−
−
=
−
=
−
∑
∑
∑
∑
γγσγγ
γσγγ
σγγ
γσγγ
γγ
γγ
γγ
γ
CBeeBCBADS
eeBCBACS
eeBCBABS
eBCBAAS
Dn
i
D
Dn
i
D
Dn
i
D
n
i
D
Al igual que el sistema no lineal anterior (solo que ahora de cuatro ecuaciones con cuatro incógnitas) es imposible simplificar más. Se resolverá por el método de Newton-Raphson5 ya descrito en el modelo anterior. 2. PARTE EXPERIMENTAL
Alargamiento (%)
Tena
cida
d (c
N/te
x)
0 2 4 6 8 100
4
8
12
16
20
En este trabajo se utilizaron dos hilos textiles obtenidos por el proceso industrial convencional. El primero de ellos de poliéster-algodón y el segundo de poliéster 100%. Ambos hilos se sometieron al ensayo de tracción en un dinamómetro universal bajo la normativa correspondiente6. En la figura 3 y figura 4 se muestran sus curvas tenacidad-alargamiento obtenidas a partir de la cual se realizó el estudio viscoelástico utilizando el modelo de Vangheluwe y el modelo de Zurek respectivamente.
Alargamiento (%)
Tena
cida
d (c
N/te
x)
0 10 20 30 40
4
8
12
16
20
24
Figura 4.- Curva tenacidad-alargamiento de hilo de poliéster
0
Figura 3.- Curva tenacidad-alargamiento
de hilo de algodón-poliéster. La tabla 1 y tabla 2 contienen valores leídos de las curvas anteriores.
XVI Semana Regional de Investigacion y Docencia en Matematicas 73
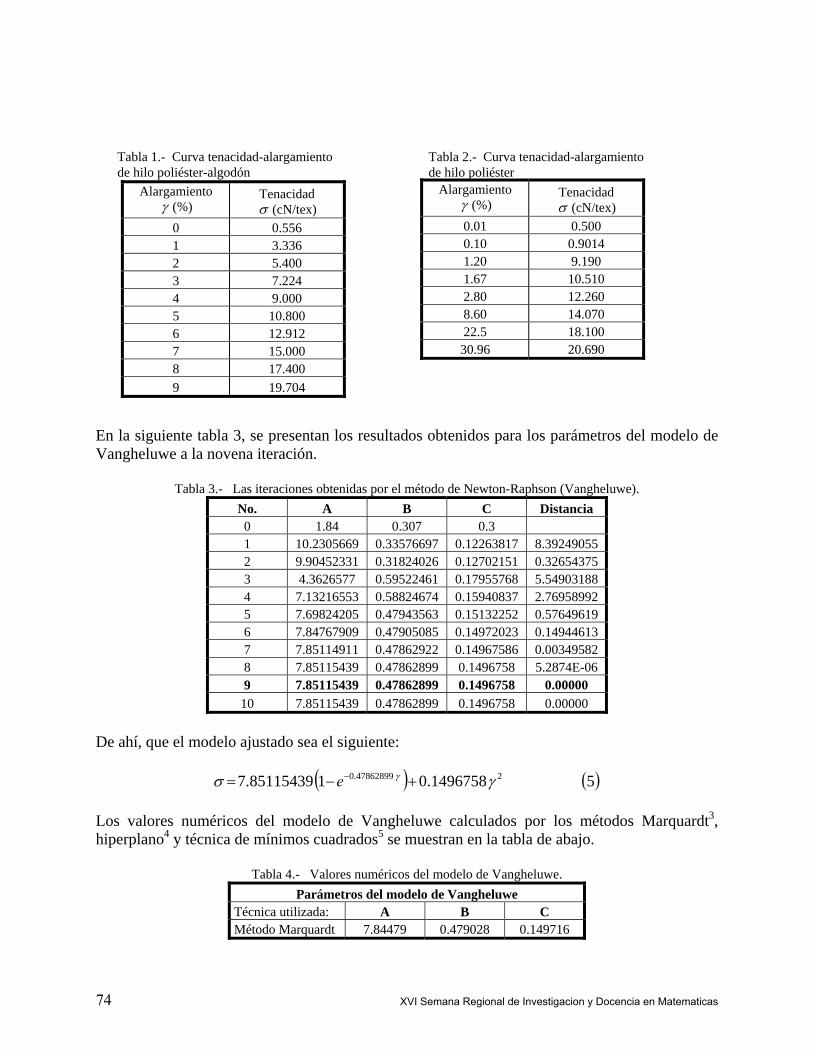
Alargamiento γ (%)
Tenacidad σ (cN/tex)
0 0.556 1 3.336 2 5.400 3 7.224 4 9.000 5 10.800 6 12.912 7 15.000 8 17.400 9 19.704
Tabla 1.- Curva tenacidad-alargamiento de hilo poliéster-algodón
Alargamiento γ (%)
Tenacidad σ (cN/tex)
0.01 0.500 0.10 0.9014 1.20 9.190 1.67 10.510 2.80 12.260 8.60 14.070 22.5 18.100 30.96 20.690
Tabla 2.- Curva tenacidad-alargamiento de hilo poliéster
En la siguiente tabla 3, se presentan los resultados obtenidos para los parámetros del modelo de Vangheluwe a la novena iteración.
Tabla 3.- Las iteraciones obtenidas por el método de Newton-Raphson (Vangheluwe). No. A B C Distancia 0 1.84 0.307 0.3 1 10.2305669 0.33576697 0.12263817 8.39249055 2 9.90452331 0.31824026 0.12702151 0.32654375 3 4.3626577 0.59522461 0.17955768 5.54903188 4 7.13216553 0.58824674 0.15940837 2.76958992 5 7.69824205 0.47943563 0.15132252 0.57649619 6 7.84767909 0.47905085 0.14972023 0.14944613 7 7.85114911 0.47862922 0.14967586 0.00349582 8 7.85115439 0.47862899 0.1496758 5.2874E-06 9 7.85115439 0.47862899 0.1496758 0.00000
10 7.85115439 0.47862899 0.1496758 0.00000 De ahí, que el modelo ajustado sea el siguiente:
( ) ( )51496758.0185115439.7 247862899.0 γσ γ +−= −e Los valores numéricos del modelo de Vangheluwe calculados por los métodos Marquardt3, hiperplano4 y técnica de mínimos cuadrados5 se muestran en la tabla de abajo.
Tabla 4.- Valores numéricos del modelo de Vangheluwe. Parámetros del modelo de Vangheluwe
Técnica utilizada: A B C Método Marquardt 7.84479 0.479028 0.149716
74 XVI Semana Regional de Investigacion y Docencia en Matematicas
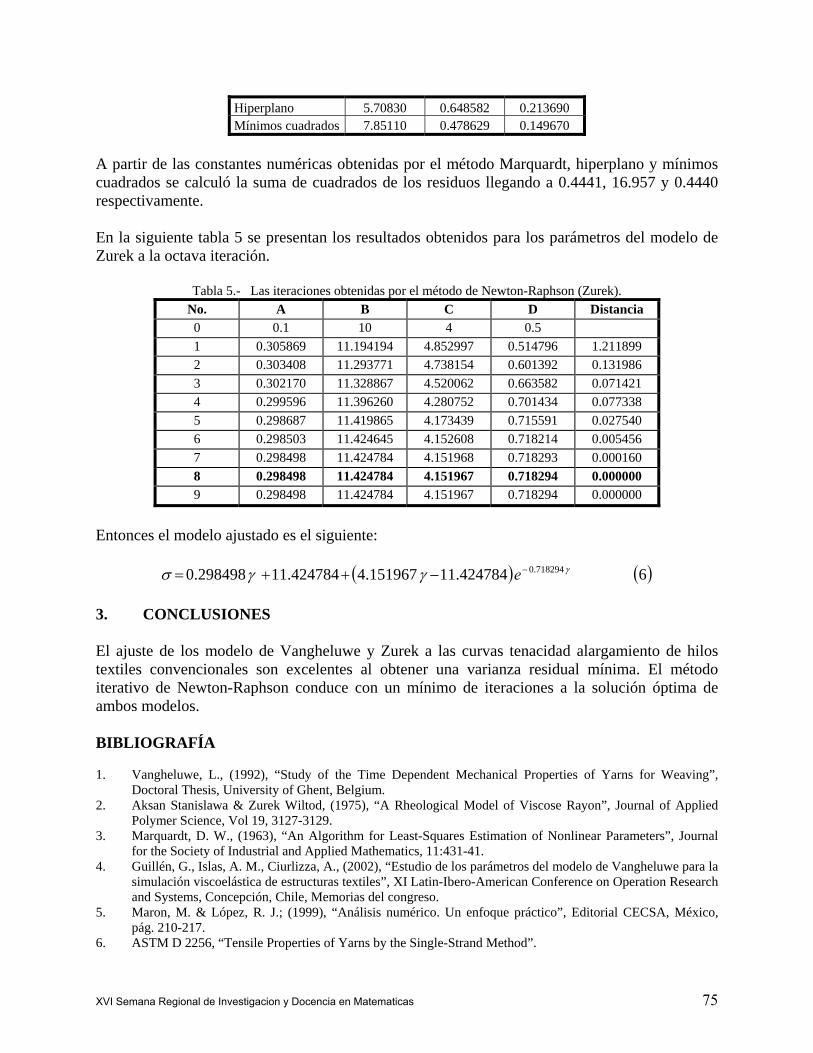
Hiperplano 5.70830 0.648582 0.213690 Mínimos cuadrados 7.85110 0.478629 0.149670
A partir de las constantes numéricas obtenidas por el método Marquardt, hiperplano y mínimos cuadrados se calculó la suma de cuadrados de los residuos llegando a 0.4441, 16.957 y 0.4440 respectivamente. En la siguiente tabla 5 se presentan los resultados obtenidos para los parámetros del modelo de Zurek a la octava iteración.
Tabla 5.- Las iteraciones obtenidas por el método de Newton-Raphson (Zurek). No. A B C D Distancia 0 0.1 10 4 0.5 1 0.305869 11.194194 4.852997 0.514796 1.211899 2 0.303408 11.293771 4.738154 0.601392 0.131986 3 0.302170 11.328867 4.520062 0.663582 0.071421 4 0.299596 11.396260 4.280752 0.701434 0.077338 5 0.298687 11.419865 4.173439 0.715591 0.027540 6 0.298503 11.424645 4.152608 0.718214 0.005456 7 0.298498 11.424784 4.151968 0.718293 0.000160 8 0.298498 11.424784 4.151967 0.718294 0.000000 9 0.298498 11.424784 4.151967 0.718294 0.000000
Entonces el modelo ajustado es el siguiente:
( ) (6424784.11151967.4424784.11298498.0 718294.0 γγγσ −−++= e ) 3. CONCLUSIONES El ajuste de los modelo de Vangheluwe y Zurek a las curvas tenacidad alargamiento de hilos textiles convencionales son excelentes al obtener una varianza residual mínima. El método iterativo de Newton-Raphson conduce con un mínimo de iteraciones a la solución óptima de ambos modelos. BIBLIOGRAFÍA 1. Vangheluwe, L., (1992), “Study of the Time Dependent Mechanical Properties of Yarns for Weaving”,
Doctoral Thesis, University of Ghent, Belgium. 2. Aksan Stanislawa & Zurek Wiltod, (1975), “A Rheological Model of Viscose Rayon”, Journal of Applied
Polymer Science, Vol 19, 3127-3129. 3. Marquardt, D. W., (1963), “An Algorithm for Least-Squares Estimation of Nonlinear Parameters”, Journal
for the Society of Industrial and Applied Mathematics, 11:431-41. 4. Guillén, G., Islas, A. M., Ciurlizza, A., (2002), “Estudio de los parámetros del modelo de Vangheluwe para la
simulación viscoelástica de estructuras textiles”, XI Latin-Ibero-American Conference on Operation Research and Systems, Concepción, Chile, Memorias del congreso.
5. Maron, M. & López, R. J.; (1999), “Análisis numérico. Un enfoque práctico”, Editorial CECSA, México, pág. 210-217.
6. ASTM D 2256, “Tensile Properties of Yarns by the Single-Strand Method”.
XVI Semana Regional de Investigacion y Docencia en Matematicas 75

Nivel Superior
Sistemas Controlables con un Valor Propio Complejo
Jorge Antonio Lopez Renterıa
Universidad de Sonora
Resumen
Sea x = Ax + Bu un sistema lineal con A2n×2n, B2n×2m y valores propios de Aigual a α ± iβ. Se presenta la pruba en un sentido del siguiente resultado: El sistemaes controlable y positivamente controlable si y solo si la complejizacin de B tiene nvectores columna que generan a Cn.
1 Introduccion
Los sistemas de control automatico nacieron junto con la civilizacion y se han ido desarrol-lando a traves del tiempo junto con ella. Hoy en dıa, los termostatos de refrigeraciones,elsistema del inhodoro, son ejemplos muy usados en nuestra vida cotidiana. Hay abundanteinformacion a cerca de controlabilidad (ver referencias de [1] y [4]). En [1] se da una caracter-izacion de sistemas controlables, en [2], [3] y [4] se estudian caracterizaciones de controlabili-dad, cuando el sistema, cuya matrız de estado tiene valores propios reales, particularmente en[4] se presenta un criterio negativo de controlabilidad para sistemas arbitrarios. En este tra-bajo se estudian sistemas lineales cuya matrız de estado tiene como valor propio un numerocomplejo y su conjugado y es diagonal por submatrices dadas en bloques de Jordan.
Sea x = Ax + Bu un sistema lineal con A2n×2n, B2n×2m y valores propios de A igual aα± iβ. Se presenta la pruba en un sentido del siguiente resultado: El sistema es controlabley positivamente controlable si y solo si la complejizacion de B tiene n vectores columna quegeneran a Cn. Para ver la demostracion en el otro sentido ver [5]
176 XVI Semana Regional de Investigacion y Docencia en Matematicas

2 Preliminares
Considerese el sistema linealx = Ax + Bu (1)
con x ∈ Rn, A ∈ Rn×n, B ∈ Rn×m. Cuando el parametro de control u este restringido atomar valores en en cono U = Rm
+ , diremos que el control es positivo.
Definicion 1: Diremos que el estado x1 del sistema (1) es controlable (con controlpositivo) en t = t0, si toda condicion inicial x0 puede ser transferida a x1 en un intervalode tiempo finito, para algun control u(t, x0) (positivo). Si todos los estados de un sistemason controlables, diremos que el sistema es completamente controlable (con controlpositivo), o simplemente controlable (con control positivo).
Definicion 2: Sea
b =
b1
b2...
b2n−1
b2n
un vector de orden par. La complejizacion de b se define como
bC =
b1 + ib2...
b2n−1 + ib2n
La comlejizacion para una matrız de la forma
A =
α β · · · 0 0−β α · · · 0 0...
.... . .
......
0 0 · · · α β0 0 · · · −β α
la definiremos como
AC =
α − iβ · · · 0...
. . ....
0 · · · α − iβ
El siguiente resultado da una caracterizacion de los sistemas CCP.
2XVI Semana Regional de Investigacion y Docencia en Matematicas 77

Teorema 1: El sistema (1) es CCP si y solo si(a) La matrız de controlabilidad C = (BAB · · · An−1B) tiene rango n.(b) No existe vector propio real v de AT que satisfaga que el producto escalar
v ·t Bu ≤ 0
Para todo u ∈ Rm+ .
(a) y (b) seran llamadas primera y segunda condiciones de Brammer, respectivamente.
3 Resultados principales
Nuestro estudio se enfocara solo a la primera condicion, pues la segunda implica la noexistencia de vectores propios reales y, nuestro sistema arroja vectores propios complejos. Elsistema controlable de estudio cuyas la matrices A2n×2n y B2n×1 son de la forma
A =
α β · · · 0 0−β α · · · 0 0...
.... . .
......
0 0 · · · α β0 0 · · · −β α
, B =
b1
b2...
b2n
Ası, nuestro problema se reduce a la siguiente Teorema:
Teorema: Sea
A2n×2n =
α β · · · 0 0−β α · · · 0 0...
.... . .
......
0 0 · · · α β0 0 · · · −β α
, B2n×m =
b11 b12 · · · b1m
b22 b23 · · · b2m...
.... . .
...b2n1 b2n2 · · · b2nm
Entonces el sistema x = Ax + Bu es controlable y CCP si y solo si< BC >= Cn.
Para demostrar este teorema, necesitaremos de algunos resultados preliminares que, sefueron presentando en el transcurso de la investigacin.
378 XVI Semana Regional de Investigacion y Docencia en Matematicas

Lema 1: Sean e = α + iβ,
A =
(α β
−β α
)b =
(b1
b2
)
Entonces
Akb =
(Re(ek)b1 + Im(ek)b2
−Im(ek)b1 + Re(ek)b2
)
Demostracion:La haremos por induccion sobre k:
Para n=1
Ab =
(α β
−β α
)(b1
b2
)
=
(αb1 + βb2
−βb1 + αb2
)
y
e1 = α + iβ
Para n=2
A2b =
(α β
−β α
)(α β
−β α
)(b1
b2
)=
((α2 − β2)b1 + (2αβ)b2
(−2αβ)b1 + (α2 − β2)b2
)
y
e2 = (α2 − β2) + i2αβ
Para n=3
A3b = A2A =
((α2 − β2) 2αβ
−2αβ (α2 − β2)
)(α β
−β α
)(b1
b2
)
=
((α3 − 3αβ2)b1 + (−β3 + 3α2β)b2
(β3 − 3α2β)b1 + (α3 − 3αβ2)b2
)
y
e3 = e2e = [(α2 − β2) + i2αβ][α + iβ] = (α3 − 3αβ2) + i(−β3 + 3α2β)
suponemos que se cumple para n=k
Akb =
(Re(ek) Im(ek)
−Im(ek) Re(ek)
)(b1
b2
)=
(Re(ek)b1 + Im(ek)b2
−Im(ek)b1 + Re(ek)b2
)
y
4XVI Semana Regional de Investigacion y Docencia en Matematicas 79

ek = Re(ek) + Im(ek)
Veamos que se cumple para n = k + 1
Ak+1b = AkAb =
(Re(ek) Im(ek)
−Im(ek) Re(ek)
)(α β−β α
)(b1
b2
)
=
(αRe(ek) − βIm(ek) βRe(ek) + αIm(ek)
−αIm(ek) − βRe(ek) −βIm(rek) + αRe(ek)
)(b1
b2
)
=
((αRe(ek) − βIm(ek))b1 + (βRe(ek) + αIm(ek))b2
(−αIm(ek) − βRe(ek))b1 + (−βIm(rek) + αRe(ek))b2
)
y
ek+1 = eke = (Re(ek) + iIm(ek))(α + iβ) = αRe(ek) + iβRe(ek) + iIm(ek) − βIm(ek)
= [αRe(ek) − βIm(ek)] + i[βRe(ek) + αIm(ek)] = Re(ek+1) + iIm(ek+1)
Lema 2: Sean
A2n×2n =
α β · · · 0 0−β α · · · 0 0...
.... . .
......
0 0 · · · α β0 0 · · · −β α
b =
b1
b2...
b2n
Con β 6= 0 y algun bi 6= 0, entonces b,Ab, son linealmente independientes mientras queb,Ab,Akb no los son para k ≥ 2.
Demostracion:Veamos la combinacion lineal f1b + f2Ab = 0
0 = f1
b1
b2...
b2n
+ f2
α β · · · 0 0−β α · · · 0 0...
.... . .
......
0 0 · · · α β0 0 · · · −β α
b1
b2...
b2n
=
= f1
b1
b2...
b2n
+f2
αb1 + βb2
−βb1 + αb2...
αb2n−1 + βb2n
−βb2n−1 + αb2n
= f1
b1
b2...
b2n
+f2(
αb1
αb2...
αb2n−1
αb2n
+
βb2
−βb1...
βb2n
−βb2n−1
) =
580 XVI Semana Regional de Investigacion y Docencia en Matematicas

= f1
b1
b2...
b2n
+ f2α
b1
b2...
b2n−1
b2n
+ f2β
b2
−b1...
b2n
−b2n−1
= f1B + f2αB + f2βB ′ = 0
= (f1 + f2α)b + f2βb′ = 0
Pero tenemos que β 6= 0 y algun bi 6= 0 para i = 1, 2, ..., 2n, tomamos
b =
(bi
bi+1
)b′ =
(bi+1
−bi
)
entonces
(f1 + f2α)
(bi
bi+1
)+ f2β
(bi+1
−bi
)=
((f1 + f2α)bi
(f1 + f2α)bi+1
)+
(f2βbi+1
−f2βbi
)
=
((f1 + f2α)bi + f2βbi+1
(f1 + f2α)bi+1 − f2βbi
)=
(00
)
ası
(f1 + f2α)bi + f2βbi+1 = 0 ..................(2)(f1 + f2α)bi+1 − f2βbi = 0 ..................(3)
De (3) tenemos f2 = f3bi+1
biβ, donde f3 = f1 + f2α y sustituyendolo en (2) nos queda
f3bi + βbi+1
(f3bi+1
βbi
)= f3
(bi +
b2i+1
bi
)= 0 ⇔ f3 = 0
pues bi +b2i+1
bi6= 0
y como f2 = f3bi+1
biβentonces f2 = 0 y f1 = f3 − f2α = 0
Solo nos falta ver que B, AB, AkB no son L.I. para k ≥ 2. Por el Lema 1 tenemosf1b + f2Ab + f3A
kb =
= f1
b1
b2...
b2n−1
b2n
+f2(α
b1
b2...
b2n−1
b2n
+β
b2
−b1...
b2n
−b2n−1
)+f3(Re(ek)
b1
b2...
b2n−1
b2n
+Im(ek)
b2
−b1...
b2n
−b2n−1
) =
= f1B + f2αB + f2βB ′ + f3Re(ek)B + f3Im(ek)B′ =
6XVI Semana Regional de Investigacion y Docencia en Matematicas 81

= (f1 + f2α + f3Re(ek))B + (f2β + f3Im(ek))B′ = 0
si tomamos f3 = −1, f2 = Im(ek)β
y f1 = − Im(ek)β
α + Re(ek)
por tanto B,AB,AkB no son L.I. para k ≥ 0
Lema 3: Sean
A2n×2n =
α β · · · 0 0−β α · · · 0 0...
.... . .
......
0 0 · · · α β0 0 · · · −β α
, B2n×1 =
b1
b2...
b2n
entonces [AB]C = ACBC
donde
[AC]n×n =
e · · · 0...
. . ....
0 · · · e
=
α − iβ · · · 0...
. . ....
0 · · · α − iβ
Demostracion:
[AB] =
αb1 + βb2
−βb1 + αb2...
αb2n−1 + βb2n
−βb2n−1 + αb2n
entonces
[AB]C =
αb1 + βb2 + i(−βb1 + αb2)...
αb2n−1 + βb2n + i(−βb2n−1 + αb2n)
Ahora
BC =
b1 + ib2...
b2n−1 + ib2n
ACBC =
α − iβ · · · 0...
. . ....
0 · · · α − iβ
b1 + ib2...
b2n−1 + ib2n
=
αb1 + iαb2 − iβb1 + βb2...
αb2n−1 + iαb2n − iβb2n−1 + βb2n
782 XVI Semana Regional de Investigacion y Docencia en Matematicas

=
αb1 + βb2 + i(−βb1 + αb2)...
αb2n−1 + βb2n + i(−βb2n−1 + αb2n)
= [AB]C
Se cree que estos resultados preliminares son suficientes para demostrar nuestro Teorema.
Teorema: Sea
A2n×2n =
α β · · · 0 0−β α · · · 0 0...
.... . .
......
0 0 · · · α β0 0 · · · −β α
, B2n×m =
b11 b12 · · · b1m
b22 b23 · · · b2m...
.... . .
...b2n1 b2n2 · · · b2nm
Entonces el sistema x = Ax + Bu es controlable y CCP si y solo si< BC >= Cn.
Demostracion:Tenemos que demostrar que RankR(C = [BAB · · ·AkB]) = 2n si y solo si RankC(BC) = n,i.e., < BC >= Cn
Haremos primero la implicacion (⇐=), supongamos que RankC(BC) = n
sean b1C, b2C, ..., bnC los n vectores complejizados L.I., Ahora tomamos los vectores cuyacomplejizacion es la de estos y formamos el conjunto
b1, Ab1, b2, Ab2, ..., bn, Abn
Ahora para ver que son R L.I., fijemonos en la combinacion lineal
c11b1 + c12Ab1 + c21b2 + c22Ab2 + · · · + cn1bn + cn2Abn = 0
por el Lema 3 tenemos que
c11b1C + c12ACb1C + c21b2C + c22ACb2C + · · · + cn1bnC + cn2ACbnC = 0
factorizando nos queda
[c11 + c12(α − iβ)]b1C + · · · + [cn1 + cn2(α − iβ)]bnC = 0
cj1 + cj2(α + iβ) = 0 ⇔ cj1 = cj2 = 0
pues β 6= 0 y cj1, cj2 ∈ R
la implicacion (=⇒) queda pendiente
8XVI Semana Regional de Investigacion y Docencia en Matematicas 83

Referencias
[1] R.F. Brammer. ”Controlability in linear autonomous systems with positi-ve controllers” . SIAM J. Control, Vol. 10, No. 2, pp. 339-353. mayo 1972.
[2] Martın E. Frıas A., Fernando Verduzco G., Horacio Leyva C. F. Arman-do Carrillo N. ”On positive controllables systems ” (en espaol). ProcAMCA. Mexico D.F. 2004.
[3] Martın E. Frıas A., Fernando Verduzco G., Horacio Leyva C. F. Arman-do Carrillo N. ”On Controllability of linear systems with positive control”.Proc 16vo congreso mundial IFAC Republica Checa. 2005.
[4] Martın E. Frıas A., Fernando Verduzco G., Horacio Leyva C. F. Arman-do Carrillo N. ”A negative Crieterion for controlabilite”, sometido para supublicacion a revista arbitraria.
[5]Jorge Antonio Lopez Renter’ia. ”Sistemas Controlables con un Valor Propio y su Con-jugado” Tesis de Licenciatura. 11 de Diciembre de 2006. Departamento de Matematicas.Universidad de Sonora. Dir. Dr. Martın Eduardo Frı‘as Armenta.
984 XVI Semana Regional de Investigacion y Docencia en Matematicas
Nivel Superior
POLINOMIOS DE BERNSTEIN Y ALGUNAS DE SUS APLICACIONES
Carlos Arturo Loredo Villalobos
Universidad Autonoma Metropolitana
Unidad Iztapalapa
ResumenLos polinomios de Bernstein permiten aproximar una funcion f en un conjunto
compacto, ası como ajustar curvas o superficies. Los polinomios de Bernstein estanconectados con la teoria de probabilidad, con problemas sobre momentos, con la teo-ria de sumas de series divergentes, con curvas de Bezier y permiten resolver algunosproblemas relacionados con la teorıa de control robusto.
1 Propiedades de los polinomios de Bernstein
Los polinomios de Bernstein son llamados ası porque son la base primordial de la de-mostracion que Sergi Bernstein realizo del Teorema de aproximacion de Weierstrass. Laesencia de esta prueba es la construccion de una sucesion de polinomios que convergenuniformemente a una funcion continua. Sabemos que un polinomio de la forma p(x) =anx
n + an−1xn−1 + · · · + a1x + a0 puede ser representado como una combinacion lineal de
elementos de la base canonica β = 1, x, . . . , xn del espacio de polinomios. En lo siguientediscutiremos otra de las bases recientemente usadas del espacio de polinomios: los polinomiosde Bernstein y mencionaremos algunas de sus propiedades.
Definicion 1.1. El polinomio de Bernstein de grado n asociado con la funcion f : [a, b] ⊂R → R esta definido por
Bn(f ; x) =n∑
i=0
(n
i
)(x− a)i(b− x)n−if(xi) (1)
donde xi = a + ih = a + in(b− a) para i = 0, 1, . . . , n.
Observacion 1.2. Cuando el intervalo es el [0,1], la ecuacion (1) se reduce a:
Bn(f ; x) =n∑
i=0
(n
i
)xi(1− x)n−if
(i
n
)(2)
Definicion 1.3. Los polinomios basicos Bernstein 1 se definen como
Bn,i(x) =
(n
i
)xi(1− x)n−i (3)
con i = 0, 1, . . . , n; n = 0, 1, . . ..
1Para quienes esten familiarizados con la Teoria de Probabilidades, reconoceran a los polinomios basicosBernstein como las funciones de densidad para una distribucion binomial.
1XVI Semana Regional de Investigacion y Docencia en Matematicas 85

Observacion 1.4. Bn,i = 0 si i < 0 o i > n.
Ejemplo 1.5. Suponiendo que 0 ≤ x ≤ 1 tenemos:
2) Polinomios basicos Bernstein de grado 2
B2,0(x) = (1− x)2, B2,1 = 2x(1− x), B2,2 = x2
3) Polinomios basicos Bernstein de grado 3
B3,0(x) = (1− x)3, B3,1(x) = 3x(1− x)2, B3,2(x) = 3x2(1− x), B3,3(x) = x3
Proposicion 1.6. Los k + 1 polinomios basicos Bernstein de grado k forman una particionde la unidad en el que la suma de todos ellos es igual a 1
k∑i=0
Bk,i(x) = 1 (k = 1, 2, . . .) (4)
Proposicion 1.7. Cualquier polinomio basico Bernstein de grado n−1 puede ser expresadocomo combinacion lineal de polinomios basicos de grado n, es decir
Bn−1,i(x) =n− i
nBn,i(x) +
i + 1
nBn,i+1(x)
Ejemplo 1.8. Segun la proposicion anterior, haciendo i = 1 y n = 3:
B2,1(x) =3− 1
3B3,1(x) +
1 + 1
3B3,2(x) = 2x(1− x)2 + 2x2(1− x) = 2x(1− x)
Ya que β = 1, x, x2, . . . , xn forman una base para el espacio de polinomios de gradomenor o igual a n, entonces cualquier polinomio basico de Bernstein de grado n puede serescrito en terminos de β.
Proposicion 1.9.
Bn,k(x) =n∑
i=k
(−1)i−k
(n
i
)(i
k
)xi
Proposicion 1.10.
xk =n∑
i=k
(ik
)(nk
)Bn,i(x) (5)
De las dos proposiciones anteriores se tiene que los polinomios basicos Bernstein formanuna base para el espacio de polinomios. Dado un polinomio de grado n podemos escribirlocomo combinacion lineal de polinomios basicos Bernstein de grado n:
p(x) = c0Bn,0(x) + c1Bn,1(x) + · · ·+ cnBn,n(x)
286 XVI Semana Regional de Investigacion y Docencia en Matematicas

⇒ p(x) =(1 x x2 · · · xn
)
b0,0 0 0 · · · 0b1,0 b1,1 0 · · · 0b2,0 b2,1 b2,2 · · · 0...
......
. . ....
bn,0 bn,1 bn,2 · · · bn,n
c0
c1
c2...cn
donde los bi,j son los coeficientes de la base β que son usados para determinar el polinomiobasico Bernstein respectivo.
Ejemplo 1.11. La representacion matricial de p(x) = c3x3+c2x
2+c1x+c0 como combinacionlineal de polinomios basicos de Bernstein es:
p(x) =(1 x x2 x3
) 1 0 0 0−3 3 0 03 −6 3 01 3 −3 1
c0
c1
c2
c3
El polinomio de Bernstein Bn(f ; x) visto como operador resulta ser un operador lineal:
Proposicion 1.12. Si f y g son dos funciones sobre [0, 1] entonces
Bn(αf + βg; x) = αBn(f ; x) + βBn(g; x)
2 Aplicaciones de los polinomios de Bernstein
2.1 Aproximacion de funciones con polinomios de Bernstein
A continuacion ilustraremos como aproximar funciones con los polinomios de Bernstein. Apartir de la expresion (4) podemos deducir que el polinomio de Bernstein para la funcionf(x) = 1 es la misma funcion. Diferenciando la expresion (4) y multiplicandola por x(1− x)obtenemos que Bn(x; x) = x, esto es, el polinomio de Bernstein para la funcion f(x) = x re-
produce esta funcion exactamente. De manera similar se obtiene que Bn(x2; x) = x2+ x(1−x)n
.Puede observarse que en este ultimo caso la funcion f(x) = x2 no es reproducida exactamente,sin embargo Bernstein probo que la sucesion de sus polinomios convergıa uniformemente.
Teorema 2.1 (de Aproximacion de Weierstrass). Si f(x) es continua en un intervalo [a, b]entonces para cualquier ε > 0 existe un n ∈ N y un polinomio pn(x) de grado n tal que|f(x)− pn(x)| < ε para todo x ∈ [a, b].Una demostracion de este teorema basada en polinomios de Bernstein puede verse en [5]
El siguiente resultado nos indica que tan buena es la aproximacion de un polinomio deBernstein a una funcion.
Teorema 2.2 (Formula asintotica). Sea f(x) acotada en [0, 1] y suponga que la segundaderivada f ′′(x) existe en un cierto punto x de [0, 1] entonces
limn→∞
n[f(x)−B(f ; x)] = −x(1− x)
2f ′′(x)
(ver [3] para una prueba).
3XVI Semana Regional de Investigacion y Docencia en Matematicas 87

Algoritmo 2.3. Evaluacion de los polinomios basicos Bernstein.
Entrada: n, xInicializar: B0 = 1Calcular:
para i = 1 hasta n hacerBi := x ∗Bi−1
para j = i− 1 hasta 1Bj := (1− x) ∗Bj + x ∗Bj − 1
B0 := (1− x) ∗B0
Salida:para i = 0 hasta n
Bn,i(x) := Bi
2.1.1 Aproximacion de funciones poligonales
Consideremos ahora el problema de obtener una buena aproximacion suave a una funcionpoligonal. Tomemos un conjunto de vertices para la curva poligonal de la forma (xi, fi) parai = 0, . . . , N y supongamos que 0 = x0 < x1 < · · · < xN = 1. Estos puntos definen unainterpolacion lineal por trozos 2 dada por
f(x) =f(xi)(xi+1 − x) + f(xi+1)(x− xi)
xi+1 − xi
con x ∈ [xi, xi+1], y esta funcion puede entonces aproximarse por polinomios de Bernstein.Si la funcion poligonal es concava entonces los polinomios de Bernstein asociados a ellaestan por debajo de la funcion y se aproximan de forma monotona. Si la curva poligonalno es concava los polinomios de Bernstein cruzaran la curva y puede suceder que algunos deestos polinomios sean concavos y otros no. Estas observaciones fueron usadas – de maneraindependiente – por P. Bezier y J. P. Casteljau para desarrollar una potente herramienta engraficas computarizadas y diseno asistido por computadora (CAD). La idea es pensar en lospuntos (xi, fi) como puntos de control que pueden ser movidos para dar como resultado unpolinomio de Bernstein con la forma que se desee.
Definicion 2.4. Dados los puntos de control p0, p1, . . . , pn podemos definir la curva deBezier de grado n mediante
p(x) =n∑
i=0
piBn,i(x) (0 ≤ x ≤ 1)
donde Bn,i(x) son polinomios basicos Bernstein.
Definicion 2.5. Dados los puntos de control p0, p1, . . . , pn podemos definir una curva deBezier mediante el Algoritmo de Casteljau:
p(x) = p(j)i (x)
2conocida tambien en la literatura como un “spline” lineal.
488 XVI Semana Regional de Investigacion y Docencia en Matematicas

donde
p(j)i (x) =
(1− x)p
(j−1)i−1 (x) + xp
(j−1)i (x) si j > 0
pi(x) si j = 0
con j = 1, . . . , n; i = 0, . . . , n− j.
El Algoritmo de Casteljau nos permite inferir un par de propiedades importantes de lascurvas de Bezier:
1. Afinidad invariante.El Algoritmo de Casteljau esta compuesto de una sucesion combinaciones afines 3
que ademas son invariantes, pues el reposicionamiento o traslacion del parametro delintervalo [0, 1] al intervalo [a, b] no afecta la forma de la curva.
2. Propiedad del casco convexo.El conjunto de todos los puntos p que pueden escribirse como combinacion convexa 4 delos puntos p0, p1, . . . , pn es llamado casco convexo de p0, p1, . . . , pn. Este casco convexoes el conjunto convexo mas pequeno que contiene al conjunto de puntos p0, p1, . . . , pn.
2.2 Estabilidad de polinomios
A continuacion explicaremos como utilizar los polinomios de Bernstein para verificar estabil-idad de familias de polinomios. En Control Robusto o en diseno asistido por computadora serequiere checar que sea positivo el determinante de una familia de matrices, esto quiere decirque las entradas dependen de parametros que varıan dentro de intervalos, y por lo tantolos determinantes son polinomios con varios parametros. Expliquemos con mas detalle estasideas. Considerese la familia de polinomios
p(s, q) = a0(q)sm + · · ·+ am−1(q)s + am(q) (6)
donde los coeficientes dependen de los parametros qi, para i = 1, . . . , l. Los parametrosindeterminados qi se sabe que pertenecen a los intervalos dados
qi ∈ [qi, qi], (i = 1, . . . , l)
Hagamos Q = [q1, q1] × . . . × [q
l, ql]. Supongamos que Q esta en la caja unitaria U . A la
familia de polinomios (6) le asociamos la matriz de Hurwitz H(p) = (hi,k(p)) definida por
hi,k(p) = a2k−i(q) (i, k = 1, . . . ,m)
Sea p(q) = det H(p(q)). El Teorema de Cruce de la Frontera (ver [4]) establece que si existeal menos un q ∈ Q asociado a un polinomio estable, entonces la familia de polinomios (6)es estable si y solo si p(q) es positivo sobre Q. Como p(q) es un polinomio l-variado en q
3Dado un numero arbitrario de puntos p0, p1, . . . , pn y si α0, α1, . . . , αn son numeros reales tales queα0 + α1 + · · ·+ αn = 1 entonces la combinacion α0p0 + α1p1 + · · ·+ αnpn es una combinacion afın.
4Dado un conjunto de puntos p0, p1, . . . , pn, si p = α0p0 + α1p1 + · · · + αnpn es una combinacion afın ysi cada αi es tal que 0 ≤ ai ≤ 1 entonces el punto p es una combinacion convexa de p0, p1, . . . , pn.
5XVI Semana Regional de Investigacion y Docencia en Matematicas 89

podemos aplicar la expansion de Bernstein para verificar la positividad (ver [2]). Veamoscomo hacerlo.Definimos un multi-ındice I como una l-tupla de enteros no negativos (i1, . . . , il). Sea S =I| I ≤ N, donde I ≤ N si N = (n1, . . . , nl) y si 0 ≤ ik ≤ nk, k = 1, . . . , l. Un polinomiol-variado p puede ser escrito en la forma
p(x) =∑I∈S
aIxI , x ∈ Rl (7)
Sin perdida de generalidad consideremos la caja unitaria U = [0, 1]l. El I-esimo polinomiode Bernstein de grado N se define como
BN,I(x) = Bn1,i1Bn2,i2 · · ·Bnl,il (8)
donde para ij = 0, . . . , nj, (j = 1, . . . , l), Bnj ,ij(xj) es un polinomio basico Bernstein segun(3) en la variable xj. Entonces la transformacion de un polinomio de la forma (7) en suforma de Bernstein es
p(x) =∑I∈S
bI(U)BN,I(x) (9)
donde los coeficientes Bernstein bi(U) de p sobre U estan dados por
bI(U) =∑J≤I
(IJ
)(NJ
) aJ , I ∈ S (10)
Bibliografıa
[1] Buchanan, James (1992). Numerical Methods and Analysis. McGraw-Hill.
[2] Garloff, Jurgen. Application of Bernstein Expansion to the Solution of Control Problems.Proceedings of MISC’99 - Workshop on Applications of Interval Analysis to Systems andControl, J. Vehi and M. A. Sainz, Eds., University of Girona, Girona (Spain), pp. 421-430,1999.
[3] Lorentz, G. G. (1953). Bernstein Polynomials. University Toronto Press.
[4] Loredo, Carlos (2005). Criterios para determinar si un polinomio es polinomio Hurwitz.Reporte de los seminarios de Investigacion I y II. Universidad Autonoma Metropolitana.
[5] Ross, Kenneth A. (1980). Elementary Analysis: the theory of calculus. Springer-Verlag.
690 XVI Semana Regional de Investigacion y Docencia en Matematicas

Nivel Superior
Existencia de Funciones Continuas en Todas Partes y Diferenciables enNinguna Parte.
Marysol Navarro Burruel
Guadalupe Avila Godoy
Universidad de Sonora
Resumen
En este trabajo reunimos tres demostraciones clasicas de la existencia de funcionescontinuas en todos los puntos de un intervalo pero que no tienen derivada en puntoalguno de ese mismo intervalo. En cada una de las primeras dos demostraciones, seconstruye un ejemplo de tales funciones, a saber, la funcion de Weierstrass y la funcionde Vander Waerden utilizando en ambos casos el hecho de que una serie uniforme-mente convergente de funciones continuas converge a una funcion continua. La tercerademostracion es por contradiccion, utilizando un argumento topologico basado en elcelebre Teorema de Categorıa de Baire.
1 INTRODUCCION
Una funcion continua en todos los puntos de un intervalo y derivable en ningun punto deese intervalo no es facil de imaginar. De hecho, la mayorıa de los estudiantes de los primerossemestres de la carrera de Lic. en Matematicas tenemos la idea que las funciones continuasen un intervalo tienen derivada finita en ”casi todos” los puntos de ese intervalo. En 1806,el cientıfico Andre Marie Ampere trato, sin exito, de demostrar esta conjetura. Fue hasta50 anos mas tarde que Karl Theodor Wilheim Weierstrass publico el primer ejemplo de unafuncion de esta clase. Aunque no fue el primero que costruyo una de estas funciones, yaque alrededor de 1830 el matematico Checo Bernard Bolzano dio el primer ejemplo de unafuncion continua y diferenciable en ninguna parte de un intervalo, en el manuscrito titulado”Functionenlehre”, pero fue publicado 100 anos despues en Praga. Para ver una descripcioncompleta de la historia de ”Functionenlehre” ver [6].
En la Seccion 2 de este trabajo hacemos una presentacion detallada de la construccion dela primera funcion continua no diferenciable publicada, que es la funcion de Weierstrass. Enla Seccion 3 presentamos una de las constucciones mas simples, la funcion de Vander Waer-den. Finalmente en la Seccion 4 se expone la demostracion de un resultado no constructivoque asegura la existencia de esta clase de funciones. Mas aun, se muestra que el conjunto encuestion tiene Categorıa de Baire II y por lo tanto es mas grande (en un sentido topologico)que el conjunto de funciones continuas que son derivables en algun punto.
1XVI Semana Regional de Investigacion y Docencia en Matematicas 91

2 FUNCION DE WEIERSTRASS
El siguiente resultado preliminar de caracter tecnico sera usado en la construccion de ambasfunciones, la de Weierstrass y la de Vander Waerden.
Lema 2.1. Sea f derivable (por ambos lados) en x, y sean (un)∞n=1 y (vn)
∞n=1 sucesiones en
R tales que un < vn para toda n ∈ N, vn − un → 0 y un ≤ x ≤ vn. Entonces
f(vn) − f(un)
vn − un
→ f ′(x).
Demostracion: Como un < x < vn y vn − un → 0, entonces
f(vn) − f(x)
vn − x→ f ′(x) (1)
yf(x) − f(un)
x − un→ f ′(x). (2)
Ademas
f(vn) − f(un)
vn − un=
vn − x
vn − un
f(vn) − f(x)
vn − x+
x − un
vn − un
f(x) − f(un)
x − un
Renombrandof(vn) − f(x)
vn − xcon an(x) y
f(x) − f(un)
x − uncon bn(x) en la ecuacion anterior,
haciendo algunos calculos y reordenando tenemos lo siguiente:
f(vn) − f(un)
vn − un= an(x)
vn − x
vn − un+ bn(x)
x − un
vn − un
=vn − x
vn − un
(1
2an(x) − 1
2bn(x)
)+
x − un
vn − un
(1
2bn(x) − 1
2an(x)
)+
1
2an(x) +
1
2bn(x).
(3)
Observese que
limn→∞
vn − x
vn − un
(1
2an − 1
2bn
)= 0
limn→∞
x − un
vn − un
(1
2an − 1
2bn
)= 0,
pues an(x) → f ′(x), bn(x) → f ′(x) ,x − un
vn − un≤ 1 y
vn − x
vn − un≤ 1. Entonces
limn→∞
f(vn) − f(un)
vn − un= lim
n→∞
(1
2an(x) +
1
2bn(x)
)= f ′(x).
292 XVI Semana Regional de Investigacion y Docencia en Matematicas

La Funcion de Weierstrass [5] se define mediante
f(x) =
∞∑
j=0
(2
3
)j
cos 15jπx. (4)
Notemos primeramente que la funcion f esta bien definida, ya que como
∣∣∣∣∣
(2
3
)j
cos 15jπx
∣∣∣∣∣ ≤(
2
3
)j
para toda j ∈ N y x ∈ R,
por el M-Test de Weierstrass se tiene que la serie en (5) converge uniformemente. Mas auncomo cada termino de la serie es continua, el mismo criterio nos asegura que la funcion f(x)es continua (ver [1]).
Enseguida mostraremos que la funcion de Weierstrass no es diferenciable en punto alguno.Sea c cualquier punto fijo, y denotemos por (xn)
∞n=1 y (yn)
∞n=1 cualesquiera dos sucesiones
convergentes a c, con xn 6= yn , xn < c < yn para toda n ∈ N y yn − xn → 0.
Por la proposicion (2.1), si f ′(c) existiera, entonces tendrıamos que f(yn)−f(xn)yn−xn
convergerıa
a f ′(c).
Ası que si pudieramos construir dos sucesiones xn y yn tales que la sucesion
f(yn)−f(xn)yn−xn
no converja, probarıamos que f no es diferenciable en c. Esto es precisamente lo que haremos.Sean
xn =kn − 1
15ny yn =
kn + 12
15n,
donde kn, para cada n ∈ N, es el unico entero que satisface la condicion kn−12≤ 15nc < kn+1
2.
Obviamente se tiene que xn < c < yn y yn − xn → 0.
De las definiciones de f , de (xn)∞n=0 y de (yn)
∞n=0, tenemos que
f(yn) − f(xn)
yn − xn=
n−1∑
j=0
(2
3
)j+1
15n[cos15j−nπ
(2kn + 1
2
)− cos15j−nπ(kn − 1)]
+∞∑
j=n
(2
3
)j+1
15n[cos15j−nπ
(2kn + 1
2
)− cos15j−nπ(kn − 1)].
(5)
Para facilitar calculos denotemos:
A =n−1∑
j=0
(2
3
)j+1
15n[cos15j−nπ
(2kn + 1
2
)− cos15j−nπ(kn − 1)] (6)
B =
∞∑
j=n
(2
3
)j+1
15n[cos15j−nπ
(2kn + 1
2
)− cos15j−nπ(kn − 1)]. (7)
3XVI Semana Regional de Investigacion y Docencia en Matematicas 93

Con esta notacion tenemos que
f(yn) − f(xn)
yn − xn= A + B.
En la suma (7) observemos que cosπ[
(2kn+1)2
]15j−n = 0, ya que j ≥ n y ademas
cos π(kn − 1)15j−n es igual a 1 o −1 dependiendo si kn es impar o par. Es decir, B es unaserie geometrica, y podemos concluir que
B =
∞∑
j=n
(2
3
)j+1
15n(−1)kn = 2(10)n(−1)kn .
Ası,f(yn) − f(xn)
yn − xn= A + 2(−1)kn10n. (8)
Aplicando el Teorema del Valor Medio a la funcion cosx en el intervalo
I =(π(kn − 1)15j−n, π
[(2kn+1)
2
]15j−n
), existe ξ > 0 tal que
cosπ
(2kn + 1
2
)15j−n − cos π(kn − 1)15j−n =
−3π
215j−n sin ξ. (9)
Entonces
∣∣∣∣cos π
(2kn + 1
2
)15j−n − cos π(kn − 1)15j−n
∣∣∣∣ ≤3π
215j−n.
De (8) y de (9) tenemos que
∣∣∣∣f(yn) − f(xn)
yn − xn− 2(−1)kn10n
∣∣∣∣ = |B| ≤ 1
210n.
Esto puede escribirse
(f(yn) − f(xn)
yn − xn
)= 2(−1)kn10n +
λ
210n,
donde −1 < λ < 1. Reagrupando terminos en el lado derecho, tenemos
(f(yn) − f(xn)
yn − xn
)= (−1)kn10n
[2 + (−1)kn
λ
2
]. (10)
Observemos que si la sucesion kn posee una subsucesion de enteros pares, entonces ellado derecho crece conforme n crece en esta subsucesion y entonces la sucesion (10) no estaacotada. Si kn no contiene una subsucesion de enteros pares, entonces debe tener una
494 XVI Semana Regional de Investigacion y Docencia en Matematicas

subsucesion de enteros impares y tendrıamos que la sucesion (10) decrece, por tanto no estaacotada.
Entoncesf(yn) − f(xn)
yn − xnno converge. Por tanto f(x) no es diferenciable en punto alguno.
3 FUNCION DE VANDER WAERDEN
La funcion de Vander Waerden [4] se define mediante
f(x) =∞∑
n=0
ak(x),
donde a0(x) es la distancia de x al entero mas cercano y ak(x) = 2−ka0(2kx).
Usando el mismo metodo que utilizamos para probar la continuidad de la funcion deWeierstras, aplicando el criterio M de Weierstrass obtenemos que la serie converge uniforme-mente y dado que cada termino de la serie es continua, tenemos que f(x) es continua.
Enseguida mostraremos que la funcion de Vander Waerden no es diferenciable en puntoalguno. Para esto consideremos primeramente un racional diadico u de orden n. Entonces
f(u) =∞∑
k=0
ak(u) =∞∑
k=0
2−ka0(i2k−n) =
n−1∑
k=0
ak(u),
ya que i2k−n es un entero para k ≥ n.
Enseguida tomemos un par de racionales diadicos sucesivos de onden n, un y vn y sea xun numero real fijo tal que un ≤ x < vn. Entonces
f(vn) − f(un)
vn − un=
∑n−1k=0 ak(vn) −
∑n−1k=0 ak(un)
vn − un=
n−1∑
k=0
ak(vn) − ak(un)
vn − un.
Como ak es lineal en [un, vn] para 0 ≤ k < n, el cociente en la suma anterior es la derivadapor la derecha a+
k (x). Pero como a+k (x) = ±1, Entonces
f(vn) − f(un)
vn − un=
n−1∑
k=0
a+k (x) =
n−1∑
k=0
±1.
Si suponemos que f(x) es diferenciable en x, por la Proposicion 2.1 tendrıamos que
f(vn) − f(un)
vn − un→ f ′(x).
Es decir, tendrıamos∑∞
k=0 ±1 = f ′(x), lo cual es Imposible.
Por lo tanto, la funcion f(x) =∑∞
n=0 ak(x) es continua en todas partes y derivable en ningunaparte.
5XVI Semana Regional de Investigacion y Docencia en Matematicas 95

4 Existencia de funciones continuas diferenciables en ninguna parte
Para demostrar la existencia de estas funciones daremos algunas definiciones preliminares, yenunciaremos sin demostracion el Teorema de Baire.
Definicion 4.1. Sea X un espacio metrico y A ⊂ X, se dice que A es denso en X si A=X.
Definicion 4.2. Sea X un espacio metrico, un subconjunto A ⊂ X se llama denso enninguna parte si Ao = ∅.
Definicion 4.3. Un subconjunto F de un espacio metrico se dice de primera categorıa siF = ∪∞
n=0Fn, donde cada Fn es denso en ninguna parte.
Definicion 4.4. Un subconjunto A de un espacio metrico se dice de segunda categorıa si noes de primera categorıa.
Teorema 4.5. El espacio metrico
C = f : [0, 1] → R, continuas ,
con la metrica d(f, g) = supx∈R |f(x) − g(x)| es un espacio metrico completo.
Teorema 4.6. (De Baire) Todo espacio metrico completo es de segunda categorıa.
ver [3].
Lo que mostraremos es que el conjunto
D = f ∈ C : f no tiene derivada finita por la derecha en algun punto
es de segunda categorıa y por lo tanto no puede ser vacıo.
Sea
En =
f ∈ C :
∣∣∣∣f(x + h) − f(x)
h
∣∣∣∣ ≤ n, para algun x ∈[0, 1 − 1
n
]y 0 < h <
1
n
.
Es facil demostrar que cualquier funcion continua que tiene derivada finita por la derecha enx pertenece a En. Por lo tanto
∪En ⊃ f ∈ C : f tiene derivada por la derecha en algun punto . (11)
Se puede demostrar que cada En es nunca denso y ası tenemos que ∪En es de primeracategorıa, y por tanto todo subconjunto de el es de primera categorıa. Entonces por (11),tenemos que
B = f ∈ C : f tiene derivada finita en algun punto
696 XVI Semana Regional de Investigacion y Docencia en Matematicas

es de primera categorıa. De aquı se sigue que
Bc = f ∈ C : f no tiene derivada finita en punto alguno
es de segunda categorıa, pues si suponemos que Bc es de primera categorıa tendrıamos queB∪Bc = C serıa de primera categorıa, lo cual es imposible, pues por el Teorema de categorıade Baire, ya que C es completo, sabemos que es de segunda categorıa. Por lo tanto Bc esde segunda categorıa (no puede ser vacıo), es decir, existe una funcion continua que no tienederivada finita en punto alguno. Para completar los detalles ver [3].
Bibliografıa
[1] T.M Apostol (1976)Analisis Matematico, Editorial Reverte.
[2] Robert G. Bartle(2004) Introduccion al Analisis Matematico de una Variable , EditorialLimusa.
[3] Ralph P. Boas Jr (1960)A Primer of Real Functions, Editorial The Mathematical Associationof America.
[4] P.BillingsleyVander Waerden’s continuous nowhere differentiable function , Revista: Ameri-can Mathematical Monthly. Numero 89.
[5] Claude W. Burrill, John R. knudsen; Holt, Rinehart and Winston Inc. (1969)Real Variablesseccion 12.3
[6] M.Hyksova Bolzanos inherietance research in Bohemia, History of Math. 17 (2001),67-91.
7XVI Semana Regional de Investigacion y Docencia en Matematicas 97

Nivel Superior
Propiedades Topologicas paraBloques de Whitney
Carlos A. Robles Corbala Manuel F. Ocejo Montano
Jessica Y. Santana B.
Departamento de Matematicas, Universidad de Sonora
Resumen
Basandose en un continuo X se pueden construir varios hiperespacios, el que aquı nosinteresa es el hiperespacio C(X) constituido por todos los subconjuntos no vacıos de X
que son cerrados y conexos, dotado de la topologıa que le induce la metrica de Haus-dorff. Si consideramos un mapeo de Whitney µ : C(X) −→ [0, 1] probaremos que losconjuntos de la forma µ−1 ([0, t]) con t > 0 son subcontinuos de C(X).
Nos preguntamos, en este trabajo: ¿ Que propiedades topologicas del continuo X sele heredan a los subcontinuos de C(X) de la forma µ−1 ([0, t]) para t suficientementepequeno ?
1. Continuos y el hiperespacio C(X)
Un continuo es un espacio metrico conexo, compacto y no degenerado. Un subcontinuo esun continuo el cual esta contenido en un espacio. Ejemplos de ellos son: el intervalo unitario,el cırculo, el triodo, cualquier grafica finita, el toro, la cerradura de la grafica de la funcionsen 1
x, el cırculo de Varsovia, el cono del conjunto de Cantor y muchısimos mas, que usted
podra encontrar en [1], [2], [3], [4] y [5].
Dado un continuo X con una metrica d consideremos los hiperespacios
2X =A ⊆ X : A 6= ∅, A cerrado
y C(X) =
A ∈ 2X : A es conexo
los cuales los dotamos de una topologıa, la inducida por la metrica de Hausdorff a saber:
H : 2X × 2X −→ R+ tal que H(A,B) = inf ε > 0 : A ⊆ N(ε,B) y B ⊆ N(ε,A) dondeN(ε,A) = y ∈ X : existe a ∈ A tal que d(y, a) < ε. Este conjunto se llama la nube de ra-dio ε centrada en A.
Observese que N(ε, a) = Bε(a) y N(ε,A) =⋃
a∈A
Bε(a).
Teorema 1. H es una metrica para 2X .
198 XVI Semana Regional de Investigacion y Docencia en Matematicas

Para su demostracion ver 1 paginas: 22-24.Una primera propiedad de esta funcion es que:Para cualquier A,B ∈ 2X ; H(A,B) < r ⇐⇒ A ⊆ N(r,B) y B ⊆ N(r,A).Ademas, observese que H no puede ser definida para todos los subconjuntos de X, ya
que H(A,ClX(A)) = 0, para cualquier subconjunto propio A de X, de donde tendrıamosque H no serıa una metrica.
Esta metrica es tan generosa para el espacio 2X (y por lo tanto, para C(X)), que nosproporciona el siguiente:
Teorema 2. El hiperespacio 2X ( o bien C(X) ) con la metrica de Hausdorff es a la vezconexo, compacto y con mas de un punto. Es decir 2X , es un continuo con la metrica deHausdorff.
Ver su demostracion en [1] , pag. 25(conexidad), 66-69(compacidad) o bien en [2].
En el capıtulo 3 de [1], podemos encontrar una gran variedad de ejemplos de modelos dehiperespacios para continuos.
Aquı solo mencionamos algunos resultados.
Empecemos con el continuo mas sencillo. Sea X = [0, 1] entoncesC([0, 1]) = A ⊂ [0, 1] : A es un subcontinuo del [0, 1] el cual es homeomorfo al trianguloequilatero que tiene como vertices: (0, 0), (1, 0) y (1
2, 1). Para mas detalles ver [1] paginas 30
y 31.
Consideremos X = S1 entonces sus subcontinuos son de tres tipos: puntos, arcos propiosde S1, y S1 mismo. Luego C(S1) ∼= D2 , es decir, el hiperespacio de todos los subcontinuosde S1 es una 2-celda.
Sea Y = el triodo simple, el cual esta formado por la union de tres arcos que coincidenexactamente en un punto comun, el cual es un extremo de cada uno de los arcos. Entoncestenemos que el hiperespacio de todos los subcontinuos del triodo simple es:
C(Y )
Ver [1], pags. 35-37.
2XVI Semana Regional de Investigacion y Docencia en Matematicas 99
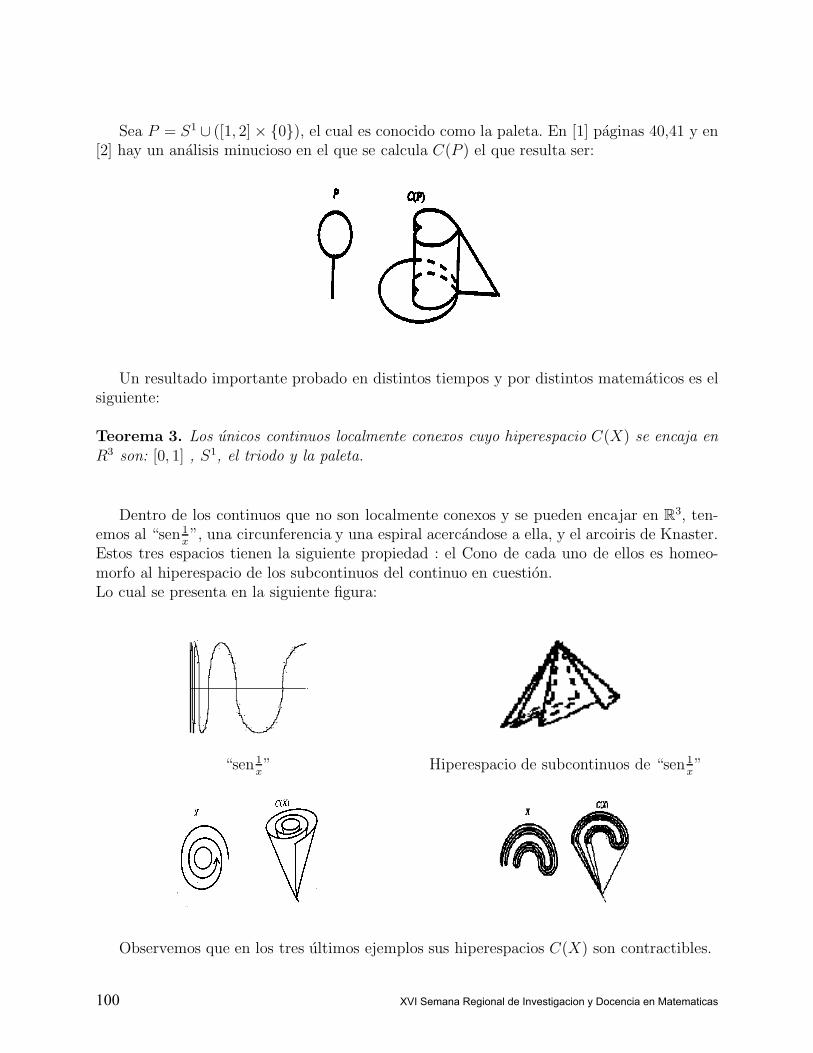
Sea P = S1 ∪ ([1, 2] × 0), el cual es conocido como la paleta. En [1] paginas 40,41 y en[2] hay un analisis minucioso en el que se calcula C(P ) el que resulta ser:
Un resultado importante probado en distintos tiempos y por distintos matematicos es elsiguiente:
Teorema 3. Los unicos continuos localmente conexos cuyo hiperespacio C(X) se encaja enR3 son: [0, 1] , S1, el triodo y la paleta.
Dentro de los continuos que no son localmente conexos y se pueden encajar en R3, ten-emos al “sen 1
x”, una circunferencia y una espiral acercandose a ella, y el arcoiris de Knaster.
Estos tres espacios tienen la siguiente propiedad : el Cono de cada uno de ellos es homeo-morfo al hiperespacio de los subcontinuos del continuo en cuestion.Lo cual se presenta en la siguiente figura:
“sen 1x” Hiperespacio de subcontinuos de “sen 1
x”
Observemos que en los tres ultimos ejemplos sus hiperespacios C(X) son contractibles.
3100 XVI Semana Regional de Investigacion y Docencia en Matematicas

2. Funciones de Whitney
Las funciones de Whitney constituyen una manera de medir el tamano de los elementosde 2X y son una herramienta muy poderosa para estudiar la estructura de los hiperespacios.
Definicion 1. Una funcion de Whitney para C(X) es un mapeo continuo µ : C(X) −→ [0, 1]tal que:
1.- µ(p) = 0 ∀ p ∈ X
2.- µ(X) = 1
3.- Si A B =⇒ µ(A) < µ(B)
Para cualquier continuo X, 2X (y por tanto C(X)) admiten funciones de Whitney. Unesbozo de su construccion es la siguiente: Sea D = P1, P2, P3,... un subconjunto denso ynumerable del compacto X. Para cada n ∈ N , definamos µn : 2X −→ [0, 1] tal que
µn(A) = max d(a, pn) : a ∈ A − mın d(a, pn) : a ∈ A .
Geometricamente, µn(A) se puede interpretar como el ancho del anillo mınimo centrado
en pn que contiene a A. Luego, definimos µ : 2X −→ [0, 1] tal que µ(A) =∞∑
n=1
µn(A)
2n.
Esta funcion resulta ser un mapeo de Whitney.
Para ver la demostracion completa ver [1] paginas 74-82.
Es conocido que el producto, el maximo, el mınimo y cualquier combinacion lineal, concoeficientes positivos de funciones de Whitney, son tambien funciones de Whitney.
3. Niveles de Whitney
Los niveles de Whitney son subconjuntos conexos de C(X), y por tanto son subcontinuosde C(X) .
Definicion 2. El nivel de Whitney son los conjuntos de la forma µ−1(t), donde t ∈ (0, 1) yµ : C(X) −→ [0, 1] una funcion de Whitney.
Los siguientes son resultados importantes para niveles de Whitney:
Lema 1.⋃
A∈µ−1(t)
A = X
Ver demostracion en [1], pag. 109.
4XVI Semana Regional de Investigacion y Docencia en Matematicas 101

Lema 2. Sea A = µ−1(t) un nivel de Whitney. Supongamos que existen A, B ∈ A tal queA ∩ B 6= ∅. Entonces existe una trayectoria en A que une a A con B. Ademas si p ∈ A ∩Bse puede pedir que todos los elementos de la trayectoria contengan a p.
Ver demostracion en [1], pag. 109-111.
Teorema 4. Los niveles de Whitney son conexos.
Ver demostracion en [1], pag. 112.
Teorema 5. Los niveles de Whitney son continuos no degenerados en C(X).
Ver demostracion en [1], [2] o [3].
Ejemplos:
1.- µ : C([0, 1]) −→ [0, 1], entonces µ−1(t) es un arco ∀ t ∈ (0, 1).
2.- µ : C(S1) −→ [0, 1], entonces µ−1(t) ∼= S1 ∀ t ∈ (0, 1).
3.- Si µ : C(Triodo) −→ [0, 1], entonces los Niveles de Whitney son de la forma:
Ver [1], pag. 113-115.
Lo cual prueba que los niveles de Whitney no tienen por que ser homeomorfos al continuode donde provienen.
Un concepto importante en la teoria de los hiperespacios es el siguiente:
Definicion 3. Dados A, B ∈ C(X) con A ( B diremos que una funcion continua α :[0, 1] −→ C(X) es un arco ordenado de A a B en C(X). Si α(0) = A, α(1) = B y si0 ≤ s < t ≤ 1 entonces α(s) ( α(t).
Observacion 6. De manera analoga se define arco ordenado para 2X . El siguiente teoremada condiciones para existencia de arcos ordenados en 2X .
Teorema 7. Sean A, B ∈ 2X tal que A ( B. Entonces existe un arco ordenado de A a Ben 2X ⇔ toda componente D de B satisface D ∩ A 6= ∅.
Ver demostracion en [1], pag. 94.
5102 XVI Semana Regional de Investigacion y Docencia en Matematicas

Teorema 8. Para cualquier continuo X el hiperespacio C(X) admite arcos ordenados, esdecir, dados A, B ∈ C(X) con A B =⇒ existe un arco ordenado de A a B en C(X).
Ver demostracion en [1] y [2].Un teorema mas es el siguiente:
Teorema 9. Sea µ : C(X) −→ [0, 1] un mapeo de Whitney y µ−1(t) un nivel de Whitney.Si A ∈ C(X) entonces
B ∈ µ−1(t) : B ∩ A 6= ∅ es un subcontinuo de µ−1(t).
Ver demostracion en [1], pag. 119-120.
4. Bloques de Whitney
Dado un continuo X y un mapeo de Whitney µ : C(X) −→ [0, 1], para 0 < t < 1 nosfijamos en los siguientes subconjuntos de C(X) : µ−1 ([0, t]) y µ−1 ([t, 1]) , los cuales sonllamados bloques de Whitney.
Estudiaremos la siguiente situacion:
¿ Si el continuo X tiene alguna propiedad topologica “p”entonces µ−1 ([0, t]) tiene lapropiedad topologica “p”para toda 0 < t < 1 ?, y reciprocamente ¿ si µ−1 ([0, t]) tiene lapropiedad topologica “p”para todo 0 < t < 1, entonces el continuo X tiene la propiedadtopologica “p” ?
Para ello primero estudiaremos µ−1 ([0, t]) y µ−1 ([t, 1]) :
Problema: Sea µ : C(X) −→ [0, 1] una funcion de Whitney. Entonces µ−1 ([0, t]) yµ−1 ([t, 1]) son subcontinuos de C(X).
Solucion: Para µ−1 ([t, 1]):
•) µ−1 ([t, 1]) 6= ∅ pues µ(X) = 1, es decir, X ∈ µ−1 ([t, 1]).•) Como µ es continua y [t, 1] cerrado =⇒ µ−1 ([t, 1]) es cerrado en C(X); y como
C(X) es compacto =⇒ µ−1 ([t, 1]) es compacto.•) µ−1 ([t, 1]) es conexo.
En efecto:Sea A ∈ µ−1 ([t, 1]). Como C(X) admite arcos ordenados, sea σA : [0, 1] −→ C(X) tal
que σA(0) = A; σA(1) = X y si 0 ≤ s < l ≤ 1 =⇒ σA(s) ( σA(l). Esto es, σA es un arcode A a X.
Ası, σA(0) = A ⊆ σA(l) ∀ l ∈ [0, 1].Ademas: A ∈ µ−1 ([t, 1]) =⇒ t ≤ µ(A) ≤ 1 y A ⊆ σA(l) ∀ l ∈ [0, 1] =⇒ t ≤ µ(A) ≤ µ(σA(l)) ≤ 1 ∀ l ∈ [0, 1].
6XVI Semana Regional de Investigacion y Docencia en Matematicas 103

Ası:t ≤ µ(A) ≤ µ(σA(l)) ≤ 1 ∀ l ∈ [0, 1] =⇒ σA([0, 1]) ⊆ µ−1 ([t, 1])
∴ µ−1 ([t, 1]) =⋃
A∈ µ−1([t,1])
σA
Los cuales se intersectan en el espacio total, X.
∴ µ−1 ([t, 1]) es conexo por trayectorias y ası µ−1 ([t, 1]) es conexo.
Ahora, probemos que µ−1 ([0, t]) es un subcontinuo de C(X):
•) µ−1 ([0, t]) 6= ∅ pues p ∈ µ−1 ([0, t]) ∀ p ∈ X•) µ es continua y [0, t] es cerrado =⇒ µ−1 ([0, t]) es cerrado contenido en el compacto
C(X). Por lo tanto µ−1 ([0, t]) es compacto.Por ultimo:•) µ−1 ([0, t]) es conexo.
En efecto:(Para ello expresemoslo como una union de conexos que se intersectan dos a dos)
Sea A ∈ µ−1 ([0, t]) y σA : [0, 1] −→ C(X) un arco ordenado de A a X en C(X).Ası, σA es continua; σA(0) = A; σA(1) = X y si 0 ≤ l ≤ l
′ ≤ 1=⇒ σA(l) ( σA(l
′) .
Ası, si A ∈ µ−1 ([0, t]) =⇒ 0 ≤ µ (A) ≤ t ≤ 1.Consideremos: µ σA : [0, 1] −→ [0, 1], (de hecho esta composicion llega a [µ(A), 1])
luego µ σA es continua, por el teorema del valor intermedio existe s ∈ [0, 1] tal que( µ σA) (s) = t, esto es, σA (s) ∈ µ−1 (t).
Consideremos el arco ordenado σA |[0,s]de σA(0) = A a σA(s) ∈ µ−1 (t).
Observemos que:σA([0, s]) es conexo, y por otro lado ya sabemos que µ−1 (t) tambien es conexo. Para
ello:Consideremos σA(s) ∈ σA([0, s])∩ µ−1 (t).Entonces σA([0, s]) ∪ µ−1 (t) es un conexo que contiene a A.
Afirmacion:σA([0, s]) ∪ µ−1 (t) ⊆ µ−1 ([0, t]).En efecto:
7104 XVI Semana Regional de Investigacion y Docencia en Matematicas

Claramente µ−1 (t) ⊆ µ−1 ([0, t]). Probemos pues que: σA([0, s]) ⊆ µ−1 ([0, t]).Sea B ∈ σA([0, s]) =⇒ ∃ tB con 0 ≤ tB ≤ s tal que σA(tB) = B. De donde:A = σA(0) ⊆ σA(tB) ⊆ σA(s)=⇒ 0 ≤ µ ( σA(0)) ≤ µ ( σA(tB)) ≤ µ ( σA(s)) = t =⇒ B = σA(tB) ∈ µ−1 ([0, t])Por lo tanto σA([0, s]) ⊂ µ−1 ([0, t])∴ σA([0, s]) ∪ µ−1 (t) ⊆ µ−1 ([0, t]).Definamos para cada A ∈ µ−1 ([0, t])ζA := σA([0, s]) ∪ µ−1 (t) el cual es conexo.Por lo tanto, para cada A ∈ µ−1 ([0, t]) existe ζA ⊆ µ−1 ([0, t]) conexo tal que A ∈ ζA.Afirmacion:⋃
A∈µ−1([0,t])
ζA = µ−1 ([0, t])
En efecto:
(⊆) probamos que para cada A ∈ µ−1 ([0, t]) =⇒ ζA ⊆ µ−1 ([0, t]), se sigue que⋃
A∈µ−1([0,t])
ζA ⊆
µ−1 ([0, t]).
(⊇) Recıprocamente, sea A0 ∈ µ−1 ([0, t]) =⇒ A0 ∈ ζA0⊆
⋃
A∈µ−1([0,t])
ζA
Por ultimo:Para cada A0, A1 ∈ µ−1 ([0, t]) se tiene que ζA0
∩ ζA16= ∅.
En efecto:Por construccion: µ−1 (t) ⊆ ζA0
y µ−1 (t) ⊆ ζA0
=⇒ ∅ 6= µ−1 (t) ⊆ ζA0∩ ζA1
.∴ µ−1 ([0, t]) es conexo.En relacion a los bloques de Whitnewy, tenemos:
PREGUNTAS:
1. ¿Si X es un continuo conexo por arcos y µ : C(X) −→ [0, 1] mapeo de Whitney
=⇒ µ−1 ([0, t]) es conexo por arcos?
2. ¿Si X es un continuo localmente conexo =⇒ µ−1 ([0, t]) es localmente conexo?
3. ¿Si X es un continuo contractible =⇒ µ−1 ([0, t]) es contractible?
4. ¿Si X es un continuo conexo por trayectorias =⇒ µ−1 ([0, t]) es conexo por trayecto-rias?
5. ¿ Si X es un continuo con la propiedad del punto fijo, entonces µ−1 ([0, t]) tiene lapropiedad del punto fijo ?
6. ¿ Si X es un continuo con la propiedad de ser unicoherente entonces el bloque deWhitney, tiene la propiedad de ser unicoherente ?
i) 1 es equivalente a 4 y ambas son verdaderas.
8XVI Semana Regional de Investigacion y Docencia en Matematicas 105

ii) 2 es verdadera; al igual que su recıproco.
En 3 por supuesto si X es contractible =⇒ C(X) lo es.Pero no hay una caracterizacion completa de que continuos X, tienen hiperespacio C(X)
contractible.Ademas, X = S1 no es contractible, pero C(X) es un disco el cual es contractibe. Pero
sabemos si µ−1 ([0, t]) es un anillo que no es contractible.
Definicion 4. Un continuo X tiene la propiedad de Kelley en p ∈ X si para toda sucesionde puntos pn∞n=1 en X tal que lım pn = p y para todo A subcontinuo de X tal que p ∈ A∃ An∞n=1 sucesion de subcontinuos de X tal que lımAn = A y pn ∈ An para cadan ∈ N .
Teorema 10. Si X tiene la propiedad de Kelley para todo p ∈ X=⇒ M : F1(X) × [0, 1] −→ C(X) tal queM(p , t) =
⋃A ∈ C(X) : p ∈ A y µ(A) ≤ t es continua.
Ver demostracion en [1], pag. 129-131.Por lo tanto, C(X) y 2X son contractibles.
Teorema 11. Si X es un continuo localmente conexo =⇒ X tiene la propiedad de Kelley.
Por lo tanto, C(X) y 2X son contractibles.Ver demostracion en [1], pag. 131-132.
Teorema 12. Si X es un continuo hereditariamente indescomponible =⇒ X tiene lapropiedad de Kelley.
Por lo tanto, C(X) y 2X son contractibles.Ver demostracion en [1], pag. 132-133.
Referencias
[1] A. Illanes. Hiperespacios de Continuos. Aportaciones Matematicas, 28, SMM, 2004.
[2] S. B. Nadler Jr. Continuum Theory, An Introduction, Monographs and Textbooks inPure and Applied Mathematics, 158, Marcel Dekker, Inc., New York, 1992.
[3] A. Illanes y S. B. Nadler Jr., Hiperspaces, Fundamentals and Recent Advances, Mono-graphs and Textbooks in Pure and Applied Mathematics, 216, Marcel Dekker, Inc. NewYork, 1999.
[4] S. B. Nadler Jr. Hyperespaces of Sets, Monographs and Textbooks in Pure and AppliedMathematics, 49, Marcel Dekker, Inc.,New York, 1978.
[5] C. A. Robles C y Julio Avila; Topologıa General. Material didactico No. 9, Departa-mento de Matematicas. Universidad de Sonora 2005.
9106 XVI Semana Regional de Investigacion y Docencia en Matematicas

Nivel Superior
UN ESTUDIO DE ONDAS ESTACIONARIAS FORZADASEN UN FLUIDO DE DOS CAPAS
Inna Shingareva Carlos Lizarraga Celaya Horacio Valenzuela Martınez
Departamento de Matematicas, Universidad de Sonora, Mexico
Resumen
El presente trabajo, consiste en un estudio sobre ondas internas forzadas no lin-eales en un fluido de dos capas, contenido en un recipiente que oscila verticalmente.Se generaliza un procedimiento asintotico basado en la teorıa de promedios a quintoorden de aproximacion propuesto en [8]. Se utiliza la formulacion Lagrangiana paradescribir las ecuaciones hidrodinamicas no lineales y las condiciones de contorno exac-tas. Siguiendo este metodo, en lugar de investigar el sistema hidrodinamico original,se utiliza la teorıa cualitativa de ecuaciones diferenciales, para investigar el sistema deecuaciones diferenciales que modelan las caracterısticas principales del movimiento delfluido.
Se determinan los modos de excitacion de ondas y se construyen las curvas derespuesta, de amplitud de onda como funcion de la frecuencia de excitacion, para unaclase dada. Las curvas de respuesta obtenidas tienen las siguientes caracterıac sticas:con el cambio de signo de la segunda correccion a la frecuencia no lineal, la curva derespuesta cambia de pendiente, es decir, presenta un caracter de resorte suave o unode resorte duro. Este fenomeno tambien es observado en un fluido de una capa (el casode ondas de superficie forzadas). La diferencia con el caso anterior, reside en que enun fluido de dos capas el fenomeno ocurre muchas veces dependiendo de la profundidadde las capas y las densidades.
1 Introduccion
El estudio de las ondas superficiales y movimientos internos en un fluido debido a la gravedadson importantes en diversas actividades humanas. En el contexto de la ingenierıa costera, elimpacto de ondas de agua muy pronunciadas pueden danar las estructuras. En aplicacionesindustriales, el problema de la estabilidad de naves que transportan lıquidos en tanquesparcialmente llenos ha llevado a la necesidad de comprender el movimiento de lıquidos dentrode espacios confinados.
Una caracterıstica importante de los movimientos de agua dentro de un tanque es lageneracion de patrones de ondas estacionarias. Estos pueden ser inducidos por las inestabil-idades de una frontera libre parametricamente forzada. En el caso cuando el recipiente dellıquido esta sujeto a oscilaciones armonicas verticales, la frontera libre se vuelve inestablepara cierto valor de la frecuencia de forzamiento y da lugar a ondas estacionarias.
El problema de excitacion de ondas estacionarias no lineales en un recipiente que os-cila horizontalmente o verticalmente por un forzamiento debil, ha sido muy investigadoanalıticamente, numericamente y experimentalmente por muchos investigadores.
1
XVI Semana Regional de Investigacion y Docencia en Matematicas 107
Moiseyev [7] fue el primero en producir una respuesta que cambia de un resorte duro(incremento de amplitud con el incremento de frecuencia) a resorte blando (disminucion deamplitud con el incremento de frecuencia).
Tadjbakhsh y Keller [12] analizaron ondas estacionarias libres y encontraron que lascurvas de frecuencia-amplitud son cualitativamente diferentes para fluidos de profundidadmayor o menor que un determinado valor, que fue denominado por Miles y Henderson comoprofundidad crıtica (ver el artıculo de revision de Miles y Henderson [6]).
Las ondas de agua parametricamente excitadas en un recipiente que oscila vertical-mente fueron estudiadas por Dodge et al. [2] para un recipiente cilındrico, por Bordakov ySekerzh-Zen’kovich [1] para un recipiente rectangular, y experimentalmente por Gu et al. [3],Virnig et al. [13] y por Kalinitchenko et el. [5] para un recipiente rectangular. Recientementese ha prestado atencion en comprender la dinmica de ondas estacionarias pronunciadas y surompimiento en los experimentos de Jiang, Perlin y Schultz [4].
En el presente trabajo, se estudia el problema de ondas estacionarias internas forzadas nolineales de amplitud finita en un fluido de dos capas en un recipiente que oscila verticalmente.Se utiliza la descripcion Lagrangiana alternativa para la descripcion de las ecuaciones dehidrodinamica no lineales y las condiciones de contorno. Generalizando el metodo asintoticobasado en la teorıa de promedios a quinto orden descrita en [8], se deriva e investiga, uti-lizando la teorıa cualitativa de ecuaciones diferenciales, el sistema de ecuaciones diferencialesque modelan las caracterısticas principales del movimiento del fluido (la amplitud y fase dela onda).
Se determinan los modos de excitacion de la onda y se construyen las curvas de respuesta,la amplitud de onda como funcion de la frecuencia de excitacion, para las ondas forzadasde una clase dada (caso unimodal). Este procedimiento nos permite determinar que lascurvas de respuesta obtenidas poseen una caracterıstica poco usual: al cambiar el signo de lasegunda correccion de la frecuencia no lineal, la curva de respuesta cambia de pendiente, esdecir, presenta un caracter de resorte suave o resorte duro. Este fenomeno se puede observaren una capa de fluido (el caso de ondas superficiales forzadas). Sin embargo, en el casode dos capas de fluido, este fenomeno ocurre muchas veces dependiendo del cambio de lasprofundidades y densidades de las capas.
2 Un Modelo para Ondas Estacionarias Forzadas
Generalizamos el caso de una capa de fluido y consideramos el movimiento bidimensionalde un fluido inviscido de dos capas en un recipiente rectangular que oscila verticalmente, talque el campo de acceleracion generado como funcion del tiempo t se rige por la siguienteexpresion:
g(t) = g0(1 +A cos ωt),
donde A es la amplitud de la fuerza oscilante, ω es la frecuencia no lineal y es igual al doblede la frecuencia lineal angular del modo correspondiente de la onda estacionaria (consider-amos una clase de ondas estacionarias, el caso unimodal), y g0 es la aceleracion debida ala gravedad. Sea ρ(m) las densidades del fluido, L la longitud del recipiente, y h(m) las pro-fundidades del fluido. Suponemos que las paredes del recipiente son rıgidas e impermeables.
2
108 XVI Semana Regional de Investigacion y Docencia en Matematicas

Aquı y en lo que sigue, denotaremos por m las capas del fluido, es decir m = 1, 2. Tambiensuponemos que un sistema local de coordenadas (x, y) esta fijo en el recipiente en la interfazlibre entre las dos capas del fluido.
Luego si utilizamos la formulacion Lagrangiana en el problema, podemos escribir el sis-tema completo de ecuaciones hidrodinamicas, es decir, las cuatro ecuaciones del movimientoy las dos ecuaciones de continuidad, de la forma:
x(m)tt x
(m)
a(m) + [y(m)tt + g0(1 +A cos ωt)]y
(m)
a(m) + p(m)
a(m)/ρ(m) = 0,
x(m)tt x
(m)b + [y
(m)tt + g0(1 +A cos ωt)]y
(m)b + p
(m)b /ρ(m) = 0,
x(m)
a(m)y(m)b − x
(m)b y
(m)
a(m) = 1.
En el sistema de referencia movil, las paredes laterales del recipiente son estacionarias,por lo tanto las condiciones de frontera en las paredes solidas son:
x(m)(0, b, t) = 0, x(m)(L, b, t) = L, y(m)(a(m), (−1)m+1h(m), t) = (−1)m+1h(m),
y las condiciones de frontera en la frontera libre son:
x(1)(a(1), 0, t)− x(2)(a(2), 0, t) = 0, y(1)(a(1), 0, t)− y(2)(a(2), 0, t) = 0,
p(1)(a(1), 0, t)− p(2)(a(2), 0, t) = 0,
donde x(m)(a(m), b, t) y y(m)(a(m), b, t) son las coordenadas de las partıculas individuales enmovimiento, p(m)(a(m), b, t) es la presion en las capas de fluidos.
Si consideramos una clase dada de ondas estacionarias forzadas (el caso unimodal), es-cogemos las condiciones iniciales de la forma siguiente:
x(m)0 = a(m) + (−1)m−1 A0
κ senh[h(m)κ]cosh[κ(−1)mb+h(m)] sen(a(m)κ) cos(ψ0),
y(m)0 = b+
A0
κ senh[h(m)κ]senh[κ(−1)mb+h(m)] cos(a(m)κ) cos(ψ0),
donde A0 y ψ0 = ωt0 + θ0 (θ0 = const) son los valores iniciales de la amplitud y de la fase.Consideramos el problema sin tomar en cuenta los efectos de tension superficial en la
frontera libre del fluido. Es un hecho conocido, que si la tension superficial es cero, elproblema de superficie libre es bien planteado si la siguiente condicion
−∇p · n > 0 (1)
es valida en un intervalo finito de tiempo [14]. Aquı p es la presion y n es la normal exteriorunitaria a la superficie libre. Esta condicion es similar en algunos aspectos, a la condicionp > 0 dentro del dominio de fluido. Por lo tanto, escogemos el valor inicial para la presionen fluido en el siguiente forma:
p(m)0 = −y(m)ρ(m)g0[1 + ε cos(ωt0)]
+(−1)mA0ρ
(m)ω2
κ2 senh[h(m)κ]cosh[κ(−1)mb+h(m)] cos(a(m)κ) cos(ψ0).
3
XVI Semana Regional de Investigacion y Docencia en Matematicas 109

Esta expresion satisface la condicion (1) y tambien la condicion p > 0 dentro del dominio defluido.
Analogamente al caso de una capa del fluido [9]–[11], suponemos que el parametropequeno ε que caracteriza a la aceleracion del movimiento del fluido es ε = Aω2/g0.
Introducimos las coordenadas adimensionales Lagrangianas y el tiempo α(m), β, ψ (en vezde a(m), b, t)
α(m) = a(m)κ, β = bκ, ψ = ωt,
y las variables adimensionales ξ(m), η(m), σ(m) (en vez de x(m), y(m), p(m)) en la forma:
x(m) = a(m) + εq ξ(m)/κ, y(m) = b+ εq η(m)/κ,
p(m) = −ρ(m)y(m)g0(1 + εw cos ωt) + κ−2εq ρ(m)ω20σ
(m),
donde
κ =πn
L, ω2
0 = gλκ, λ =1− γ
γ1c
, γ1c = cothχ(2)+ cothχ(1)γ, γ =ρ(1)
ρ(2)< 1, χ(m) = h(m)κ.
Estas expresiones son validas para un numero dado de onda κ (con n nodos de onda) y lafrecuencia lineal natural correspondiente ω para las profundidades adimensionales del fluidoχ(m) en cada capa del fluido.
En terminos de las coordenadas y variables adimensionales el problema de frontera librese puede escribir en la forma
L1(m)(ξ(m), σ(m)) = −εq ξ(m)ψψ ξ
(m)
α(m) + η(m)ψψ η
(m)
α(m),
L2(m)(η(m), σ(m)) = −εq ξ(m)ψψ ξ
(m)β + η
(m)ψψ η
(m)β ,
L3(m)(ξ(m), η(m)) = −εq ξ(m)β η
(m)
α(m) − η(m)β ξ
(m)
α(m),ξ(m)(0, β, ψ) = 0, ξ(m)(πn, β, ψ) = 0, η(m)(α(m), (−1)m−1χ(m), ψ) = 0,
α(1) − α(2) = −εq ξ(1)(α(1), 0, ψ)− ξ(2)(α(2), 0, ψ),η(1)(α(1), 0, ψ)− η(2)(α(2), 0, ψ) = 0,
γK2 − γrK1 = εw cos(ωt)[γγη(1)(α(1), 0, ψ) + γrη
(2)(α(2), 0, ψ)],
donde
L1(ξ, σ) = ξψψ + σα, L2(η, σ) = ηψψ + σβ, L3(ξ, η) = ξα + ηβ,
K1=η(1)(α(1), 0, ψ)+
(γ − 1)
γ1c
σ(1)(α(2), 0, ψ), K2=η(2)(α(1), 0, ψ)+
γ − 1
γ1c
σ(2)(α(2), 0, ψ),
γ = γ1/γ1c, γ1 = cothχ(2)+ cothχ(1), γr =cothχ(2)(γ − 1)
γ1c
.
4
110 XVI Semana Regional de Investigacion y Docencia en Matematicas

3 Transformaciones de Promedios
Para construir una solucion aproximada al problema, generalizamos el procedimiento asin-totico para el caso de una capa de fluido descrito en [8], aplicando las transformaciones depromedios. La idea basica es transformar el sistema hidrodinamico complicado original a unsistema que modela las caracterısticas principales de movimiento del fluido y el cual es masfacil investigar por varios metodos (analıticos, cualitativos, numericos) para cada orden deε. Mencionamos aquılas etapas basicas del procedimiento:La primera aproximacion. Escogemos la primera aproximacion en la forma que correspondaa las condiciones iniciales para una clase dada de ondas estacionarias (el caso unimodal):
ξ1(m) = B(−1)m−1 senα(m) cosh[(−1)mβ+χ(m)] cosψ/ senhχ(m),
η1(m) = B cosα(m) senh[(−1)mβ+χ(m)] cosψ/ senhχ(m),
σ1(m) = B(−1)m cosα(m) cosh[(−1)mβ+χ(m)] cosψ/ senhχ(m).
Construccion de las aproximaciones y transformaciones apropiadas. Buscamos las transfor-maciones apropiadas de las funciones dependientes ξ(m), η(m), σ(m) en la forma
ξ(m) = ξ1(m) +N∑i=2
ε(i−1)qξi(m)(α(m), β,B(t), ψ(t), θ(t)) +O(N),
η(m) = η1(m) +N∑i=2
ε(i−1)qηi(m)(α(m), β,B(t), ψ(t), θ(t)) +O(N),
σ(m) = σ1(m) +N∑i=2
ε(i−1)qσi(m)(α(m), β,B(t), ψ(t), θ(t)) +O(N),
donde ξi(m), ηi(m), y σi(m) son funciones desconocidas y 2π periodicas. Las transformacionesapropiadas de las caracterısticas principales de movimiento, B(t), θ(t), buscamos en la forma:
dBdt
=N∑i=1
εiq Ui(B, θ) +O(N),dθ
dt= ∆ +
N∑i=1
εiq Vi(B, θ) +O(N),
donde ∆ = ω − ω/2 (2ω ≈ ω) es un parametro pequeno (la diferencia entre las frecuenciaslineal y oscilante del sistema), Ui, Vi son nuevas funciones desconocidas y 2π periodicas, B esla amplitud y θ es la fase lenta de n-esimo armonico de la onda. La fase rapida de la onda deun armonico dado se define como ψ(t) = ωt/2 + θ(t), y de acuerdo de las transformaciones
definidas se obtienedψ
dt= ω +
N∑i=1
εiqVi(B, θ) +O(N).
Procedimiento algebraico. Si sustituimos estas expansiones en las ecuaciones de movimientoy las condiciones de frontera, aplicamos las condiciones de ortogonalidad para solucionesperiodicas, e igualando potencias iguales de ε, obtenemos el sistema lineal no homogeneo deecuaciones diferenciales parciales y condiciones de frontera para cada aproximacion. Estasistema es extremadamente complicado y se puede derivar con ayuda de metodos de algebra
5
XVI Semana Regional de Investigacion y Docencia en Matematicas 111

computacional. Realizamos los calculos usando el sistema Maple. La estructura de unasolucion al problema tiene la siguiente forma:
ξi(m) =i∑
j=0
i∑k=0
i∑l=0
Ξjkli(m) sen(jα(m)) cosh[k(β + χ(m))] cos(lψ),
ηi(m) =i∑
j=0
i∑k=0
i∑l=0
Hjkli(m) cos(jα(m)) senh[k(β + χ(m))] cos(lψ),
σi(m) =i∑
j=0
i∑k=0
i∑l=0
Σjkli(m) cos(jα(m)) cosh[k(β + χ(m))] cos(lψ).
Utilizando las condiciones de solvabilidad de las ecuaciones para Ξ111i(m), H111
i(m), y Σ111i(m), en-
contramos las funciones Ui−1 y Vi−1.
El sistema dinamico resultante. Finalmente obtenemos el siguiente sistema dinamico quedescribe la evolucion de la amplitud B y la fase lenta θ:
dBdt
= Bεζ sen(2θ),dθ
dt= ∆ + εζ cos(2θ)− εφωB2,
donde
ζ =ω2
2ω, φ = − 1
64γ21cγ2c
P(χ(1), χ(1)),
P(χ(1), χ(1)) = (−3 coth2 χ(1) − 12 coth4 χ(1) − 2 + 9 coth6 χ(1)) cothχ(2)γ3
+[−4 coth4 χ(2) cothχ(1) + (10 coth2 χ(1) − 18 coth4 χ(1) + 4) coth3 χ(2)
+(9 coth5 χ(1) + cothχ(1) − 10 coth3 χ(1)) coth2 χ(2)
+(2 coth2 χ(1) + 4 + 6 coth4 χ(1)) cothχ(2) − 6 coth5 χ(1) − 2 cothχ(1) − 4 coth3 χ(1)]γ2
+[(−6 + 9 coth2 χ(1)) coth5 χ(2) + (−18 coth3 χ(1) + 6 cothχ(1)) coth4 χ(2)
+(−4− 10 coth2 χ(1)) coth3 χ(2) + (2 cothχ(1) + 10 coth3 χ(1)) coth2 χ(2)
+(coth2 χ(1) − 2− 4 coth4 χ(1)) cothχ(2) + 4 cothχ(1) + 4 coth3 χ(1)]γ
−2 cothχ(1) + 9 coth6 χ(2) cothχ(1) − 3 coth2 χ(2) cothχ(1) − 12 coth4 χ(2) cothχ(1).
Aquı φ es la correccion no lineal de segundo orden a la frecuencia de onda.
4 Puntos Fijos
Ahora estudiamos el sistema dinamico que describe la evolucion de la amplitud B y lafase lenta θ y buscamos los modos de excitacion de las ondas estacionarias forzadas. Siintroducimos las variables nuevas u =
√2B sen θ, v =
√2B cos θ reescribimos el sistema
dinamico en la forma
du
dt= v [εζ + ∆] v − 1
2εφω(v2 + u2)v,
dv
dt= u [εζ −∆]u+
1
2εφω(v2 + u2)u.
6
112 XVI Semana Regional de Investigacion y Docencia en Matematicas

Este sistema dinamico se puede reescribir en forma Hamiltoniana con coordenadas canonicasu, v y Hamiltoniano
H =1
2∆(v2 + u2) +
1
2εζ(v2 − u2)− 1
8εφω(v2 + u2)2.
Si analizamos los puntos fijos del sistema y construimos los retratos de fase correspondi-entes, obtenemos los siguientes resultados. El sistema dinamico tiene los tres tipos de puntosfijos.
El punto fijo trivial: C = 0, u = 0, v = 0. Este punto fijo existe siempre. Realizando elanalisis encontramos que el punto fijo trivial es estable en el sentido de Lyapunov si |∆| > εζe inestable si |∆| < εζ.
Los puntos fijos del tipo “-”.
B =
√∆− ζε
εφω, θ =
π
2,3π
2, u = ±
√2B, v = 0.
Estos puntos fijos existen si ∆ ≥ εζ. Los puntos fijos del tipo “-” coinciden con el puntofijo trivial si ∆ = εζ. Realizando el analisis encontramos que los puntos fijos del tipo “-” sonestables en el sentido de Lyapunov si φ < 0 e inestables si φ > 0.
Los puntos fijos del tipo “+”.
B =
√∆ + ζε
εφω, θ = 0, π, u = 0, v = ±
√2B.
Estos puntos fijos existen si ∆ ≥ −εζ. Los puntos fijos del tipo “+” coinciden con el puntofijo trivial si ∆ = −εζ. Realizando el analisis, obtenemos que los puntos fijos del tipo “+”son estables en el sentido de Lyapunov si φ > 0 e inestables si φ < 0.
Agradecimientos
Este trabajo ha sido realizado gracias a financiamiento de SEP-CONACYT, Proyectos F-41421 y 43208.
Bibliografıa
[1] Bordakov, G. A. and Sekerzh-Zen’kovich, S. Ya. Nonlinear Faraday resonancein two-layer fluid of finite depth. Preprint of IPM USSR. AS. Moscow. 475 (1990) 18p.
[2] Dodge, F. T., Kana, D. D., and Abramson, N. Liquid surface oscillations inlongitudinally excited rigid cylindrical containers. AIAA J. 3 (1965) 685–695.
[3] Gu, X. M., Sethna, P. R., and Narain, A. On three-dimensional nonlinear sub-harmonic resonant surface waves in a fluid: Part I—theory. J. Appl. Mech. 55 (1988)213–219.
7
XVI Semana Regional de Investigacion y Docencia en Matematicas 113

[4] Jiang, L., Perlin, M., and Schultz, W. W. Period tripling and energy dissipationof breaking standing waves. J. Fluid Mech. 369 (1998) 273–299.
[5] Kalinitchenko, V. A., Nesterov, S. V., Sekerzh-Zen’kovich, S. Ya., andChaykovskii, A. A. Experimental investigation of standing waves excited under theFaraday resonance J. Fluid Dynamics 30 (1) (1995) 101–106.
[6] Miles, J. W. and Henderson, D. Parametrically forced surface waves Annu. Rev.Fluid Mech. 22 (1990) 143–165.
[7] Moiseyev, N.N. On the theory of nonlinear vibrations of a liquid. Prikl. Mat. Mekh. 22(1958) 612–621.
[8] Shingareva, I. Investigation of Standing Surface Waves in Fluid of Finite Depth byComputer Algebra Methods. PhD Thesis, Phys. and Math., IPM RAS, Moscow, (1995)136p.
[9] Shingareva, I. and Lizarraga-Celaya, C. High Order Asymptotic Solutions toFree Standing Water Waves by Computer Algebra. Proceedings of the Maple SummerWorkshop, July 11-14, Waterloo, Ontario, Canada, R.J. Lopez (Ed.) (2004) 1–28.
[10] Shingareva, I. and Lizarraga-Celaya, C. On Frequency-Amplitude Dependencesfor Surface and Internal Standing Waves. J. of Computational and Applied Mathematics(in press) (2006).
[11] Shingareva, I y Lizarraga-Celaya, C. Curva Crıtica en Estructuras de Fluidos.Aportaciones Matematicas 345 (2004) 57–72.
[12] Tadjbakhsh, I. and Keller, J. B. Standing surface waves of finite amplitude. J. FluidMech. 6(4) (1960) 442–451.
[13] Virnig, J. C., berman, A. S., and Sethna, P. R. On three-dimensional nonlinearsubharmonic resonant surface waves in a fluid: Part II—experiment. J. Appl. Mech. 55(1988) 220–224.
[14] Yosihara, H. Gravity waves on the free surface of an incompressible perfect fluid of finitedepth. Kyoto Univ.Math. 18 (1982) 49–96.
8
114 XVI Semana Regional de Investigacion y Docencia en Matematicas