universidad tecnolÓgica equinoccial -...
TRANSCRIPT

I
II
UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
SISTEMA DE EDUCACION A DISTANCIA
CARRERA DE TECNOLOGÍA DE PETRÓLEOS
CARÁTULA
TEMA:
¨IMPLEMENTACIÓN DEL SISTEMA DE INSTRUMENTACIÓN PARA LA
UNIDAD MOBILE TEST UNIT (MTU) RECONSTRUIDA DE LA COMPAÑĺA
TECHNICAL SYSTEM POWER CIA. LTDA.¨
TESIS DE GRADO PREVIA LA OBTENCIÓN DEL TÍTULO DE
TECNÓLOGO EN PETRÓLEOS.
Elaborado por: Jaime Enrique Terán Merchán
Director de Tesis: Ing. Raúl Baldeón López.
Quito – Ecuador
2011
III
DECLARACIÓN
Yo Jaime Enrique Terán Merchán, declaro que el trabajo aquí descrito es de mi autoría; que
no ha sido previamente presentado para ningún grado o calificación profesional; y, que he
consultado las referencias bibliográficas que se incluyen en este documento.
La Universidad Tecnológica Equinoccial puede hacer uso de los derechos correspondientes
a este trabajo, según lo establecido por la Ley de Propiedad Intelectual, por su Reglamento
y por la normativa institucional vigente.
_________________________
JAIME ENRIQUE TERÁN MERCHÁN

IV
CERTIFICADO DEL DIRECTOR
Certifico que la presente tesis de grado fue elaborada en su totalidad por el señor, JAIME
ENRIQUE TERÁN MERCHÁN.
Ing. Raúl Baldeón
DIRECTOR DE TESIS
V
CERTIFICADO DE LA EMPRESA
VI
AGRADECIMIENTO
Al Director Ing. Raúl Baldeón, por brindarme su apoyo y su guía en el desarrollo de este
trabajo.
A la compañía Technical System Power por haberme abierto las puertas y las facilidades
para realizar este trabajo de investigación, a las personas que me brindaron todo su apoyo
para culminar este trabajo de investigación a todos ellos muchas gracias.
Jaime Terán.
VII
DEDICATORIA
Este proyecto está dedicado a:
Dios por darme la fortaleza para culminar tan anhelada meta.
Por el apoyo incondicional de todas aquellas personas que me rodean,
confiaron y creyeron en mi persona.
VIII
ÍNDICE GENERAL
DECLARACIÓN ...............................................................................................................................III
CERTIFICADO DEL DIRECTOR .................................................................................................. IV
CERTIFICADO DE LA EMPRESA .................................................................................................. V
AGRADECIMIENTO ...................................................................................................................... VI
DEDICATORIA .............................................................................................................................. VII
ĺNDICE GENERAL ........................................................................................................................ VIII
ÍNDICE DE CONTENIDOS ............................................................................................................ IX
ÍNDICE DE GRÁFICOS ................................................................................................................. XII
ÍNDICE DE TABLAS ..................................................................................................................... XV
ÍNDICE DE ANEXOS .................................................................................................................. XVI
RESUMEN ................................................................................................................................... XVII
ABSTRACT ................................................................................................................................. XVIII
IX
ÍNDICE DE CONTENIDOS
CAPÍTULO I
1. INTRODUCCIÓN
1.2 OBJETIVO GENERAL ................................................................................................... 1
1.3 OBJETIVOS ESPECIFICOS ........................................................................................... 1
1.4 HIPOTESIS O IDEAS A DEFENDER ............................................................................ 2
1.5 JUSTIFICACION ............................................................................................................ 2
1.6 PARTE TEORICA ............................................................................................................ 4
1.7 METODOLOGIA ............................................................................................................. 4
1.8 UBICACION DEL AREA DEL PROYECTO ................................................................ 6
1.9 DEFICION DE TERMINOS BASICOS ......................................................................... 7
1.9.1 LEVANTAMIENTO ARTIFICIAL POR BOMBEO HIDRAULICO ....................... 7
1.9.2 FLUIDO MOTRIZ ........................................................................................................ 9
1.9.3 BOMBA JET .................................................................................................................. 9
1.9.4 BOMBA DE DESPLAZAMIENTO POSITIVO ........................................................ 11
1.9.5 SEPARADOR DE PRODUCCION ............................................................................. 12
1.9.6 CABEZAL DEL POZO ............................................................................................... 14
1.9.7 INSTRUMENTACION ............................................................................................... 15
CAPÍTULO II
2. PARTE EXPERIMENTAL
2.1 EQUIPOS DE LA UNIDAD MOBILE TEST UNI ..................................................... 17
2.1.1 TANQUES D E ALMACENAMIENTO, TANQUES D E LAVADO,
SEPARADORES Y / O TRATADORES ........................................................................... 17
2.1.2 BOMBAS DE SUPERFICIE ....................................................................................... 18
2.1.3 MÚLTIPLES DE CONTROL...................................................................................... 18
X
2.1.4 VÁLVULA DE CONTROL ........................................................................................ 18
2.1.5 LUBRICADOR ............................................................................................................ 19
2.1.6 MOTOR DE COMBUSTIÓN INTERNA ................................................................... 19
2.1.6.1 Ventajas y desventajas .............................................................................................. 21
2. 1.7 TRANSMISIÓN MECÁNICA ................................................................................. 23
2. 1.8 BOMBA DE DESPLAZAMIENTO POSITIVO ..................................................... 26
2. 1.9 BOMBAS RECIPROCANTES ................................................................................. 26
2. 1.10 BOMBA ROTATORIA ........................................................................................... 27
2. 1.11 VESSEL DE FLUIDO MOTRIZ / SEPARADOR DE PRODUCCIÓN ................ 28
2. 1.11.1 Funcionamiento ..................................................................................................... 28
2. 1.11.2 Eliminación de líquido del gas ............................................................................... 29
2. 1.11.3 Eliminación de gas del líquido ............................................................................... 30
2. 1.11.4 Partes constitutivas de un separador de gas .......................................................... 30
2. 1.12 CLASIFICACIÓN DE LOS SEPARADORES ....................................................... 32
2. 2 EQUIPO DE FONDO ................................................................................................... 34
2. 2.1 BOMBA HIDRÁULICA JET .................................................................................... 35
2.2.2 CARACTERÍSTICAS DEL BOMBEO HIDRÁULICO TIPO JET. ......................... 36
2. 2.3 INSTRUMENTACION .............................................................................................. 38
CAPÍTULO III
3. RESULTADOS Y DISCUSIÓN DE LA IMPLEMENTACIÓN DE
INSTRUMENTACIÓN A LA UNIDAD MOBIL TEST UNIT (MTU)………....…39
3.1 SENSORES DEL MOTOR……………………………………………………....…39
3.1.1 SOLENOID SHUTOFF 24V …………………………………...………….…......40
3.1.2 SENSOR DE TEMPERATURA DE AGUA ………………………..……………42
3.1.3 SENSOR DE PRESIÓN DE ACEITE…………………………….…………....…43
3.1.4 SENSOR DE VELOCIDAD DEL MOTOR (PICK UP)……………………....…44
XI
3.2 SENSORES DE LA BOMBA / VESSEL……………………………………….…..47
3.2.1 SWITCH DE ALTA Y BAJA PRESIÓN DE SUCCIÓN DE LA BOMBA....…...47
3.2.2 SWITCH DE ALTA Y BAJA PRESIÓN DE DESCARGA….…………………..49
3.2.3 SWITCH DE ALTA VIBRACIÓN………………………………………………..52
3.3 MÓDULO ELECTRÓNICO DEEP SEA ELECTRONIC / PROGRAMADOR
LÓGICO DSE/PLC …………………………………………………………………......54
3.3.1 PRINCIPALES CARACTERÍSTICAS Y BENEFICIOS………….…………….55
3.3.2 INSTALACIÓN SOFTWARE DEEP SEA ELECTRONIC…………….…..……57
3.3.3 INSTALACIÓN DEL HADWARE ………………….………………………….62
3.3.4 CONFIGURACIÓN DEL MÓDULO DEEP SEA ELECTRONIC EN LA
UNIDAD MOBILE TEST UNIT.……………………………………………………....63
3.4. DISEÑO DEL DIAGRAMA DE CONTROL ELÉCTRICO………………………83
3.4.1 SIMBOLOGÍA ELÉCTRICA……………………………………………..……...83
3.4.2 DIAGRAMA DE CONTROL ELÉCTRICO. …………………………..………..84
3.5 FUNCIONAMIENTO DEL SISTEMA……………………………………….....…85
3.5.1 PRINCIPIO DE FUNCIONAMIENTO DEL SISTEMA DE
INSTRUMENTACIÓN DE LA UNIDAD MOBIL TEST UNIT (MTU). …………….85
3.5.2 OPERACIÓN DE LA UNIDAD MOBILE TEST UNIT……………...………….87
3.6 RECOLECCIÓN DE DATOS….………….………………………………………..88
3.6.1 PROYECTO…...………………………………………………………………….88
3.6.2 LUGAR……..…………………………………………………………………….89
3.6.3 METODO DE RECOLECCION...………………………………………………...89
3.6.4 DEFINICIÓN OPERACIONAL……………...…………………………………...89
3.6.5 TABULACION DE LOS DATOS ………………………………………….… …90
3.6.6. INTERPRETACIÓN DE LA INFORMACIÓN…………………..……………,..91
3.7. ESTUDIO TÉCNICO ECONÓMICO DEL PROYECTO……………..…………...91
3.7.1 DISEÑO Y FACTIBILIDAD TÉCNICA…………………………………………91
3.7.2 ANÁLISIS DE COSTOS…………………………………………………………94
XII
3.7.3 PROYECCIÓN DE GASTOS……………………………………………………..94
CAPÍTULO IV
4. CONCLUSIONES Y RECOMENDACIONES
4.1 CONCLUSIONES…………………………………………………………………..95
4.2 RECOMENDACIONES………………………………..………………………..…96
BIBLIOGRAFĺA………………………………..……………………………..……...…97
XIII
ÍNDICE DE GRÁFICOS
Gráfico No 1 Mobil Test Unit .………………………………………………………….. 3
Gráfico No 2 Ubicación TPS Cia. LTDA. ……………………………………………… 6
Gráfico No 3 Bomba Jet de Fondo de Pozo……………………………………………..10
Gráfico No 4 Bomba Quintuplex…………………………………………….………….12
Gráfico No 5 Separador Trifásico de Prueba……………………………………………13
Gráfico No 6 Partes del Cabezal del Pozo……………………………………………….15
Gráfico No 7 Instrumentos de Control…………………………………………………..16
Gráfico No 8 Motor a Diesel de Combustión In………………………………………...21
Gráfico No 9 Motor Caterpillar 3406. …………………………………………………..22
Gráfico No 10 2Transmisión Mecánica………………………………………………..24
Gráfico No 11 Partes transmisión Mecánica……………………………………………25
Gráfico No 12 Bomba de Desplazamiento Positivo……………………………………27
Gráfico No 13 Separador de Producción………………………………………………..33
Gráfico No 14 Solenoide de Apagado del Motor ……………………………………..41
Gráfico No 15 Sensor de Temperatura de Agua ……………………………………….43
Gráfico No 16 Sensor de Presión de Aceite…………………………………………….44
Gráfico No 17 Sensor de Velocidad ……………………………………………………45
Gráfico No 18 Sensor de velocidad PICKUP……………………………………………46
Gráfico No 19 Switch de alta y baja presión ……………………………………………48
Gráfico No 20 Conexión Sensor de Presión …………………………………………….49
Gráfico No 21 Switch Control de presión ………………………………………………50
Gráfico No 22 Calibración Set de Presión………………………………………………51
Gráfico No 23 Switch de alta vibración………………………………………….……..52
Gráfico No 24 Esquema switch de alta vibración………………………………………53
Gráfico No 25 Módulo Electrónico Deep Sea Electronic……………………………….55
Gráfico No 26 Software Deep Sea Electronic…………………………………………...57
XIV
Gráfico No 27 Software Deep Sea Electronic…………………………………………...58
Gráfico No 28 Software Deep Sea Electronic…………………………………………...59
Gráfico No 29 Software Deep Sea Electronic……………………………………...……60
Gráfico No 30 Software Deep Sea Electronic…………………………………………...61
Gráfico No 31 Hardware Deep Sea Electronic ………………………………………… 62
Gráfico No 32 Configuración Software DSE Paso No. 1 ……………………………...63
Gráfico No 33 Configuración Software DSE Paso No2…………………………….…..64
Gráfico No 34 Configuración Software DSE Paso No3…………………………….…..65
Gráfico No 35 Configuración Software DSE Paso No4…………………………….…..66
Gráfico No 36 Configuración Software DSE Paso No5…………………………….…..67
Gráfico No 3 Configuración Software DSE Paso No6……………………………….....68
Gráfico No 38 Configuración Software DSE Paso No7…………………………….…..69
Gráfico No 39 Configuración Software DSE Paso No8…………………………….…..70
Gráfico No 40 Configuración Software DSE Paso No9 ………………………………..71
Gráfico No 41 Configuración Software DSE Paso No10……………………………….73
Gráfico No 42 Configuración Software DSE Paso No11………………………….……74
Gráfico No 43 Configuración Software DSE Paso No12……………………………….75
Gráfico No 44 Configuración Software DSE Paso No13……………………………….76
Gráfico No 45 Configuración Software DSE Paso No14 ……………………………...77
Gráfico No 46 Configuración Software DSE Paso No15……………………………….78
Gráfico No 47 Configuración Software DSE Paso No16……………………………….79
Gráfico No 48 Configuración Software DSE Paso No17……………………………….80
Gráfico No 49 Configuración Software DSE Paso No18……………………………….81
Gráfico No 50 Configuración Software DSE Paso No. 19..…………………………….82
Gráfico No 51 Simbología de Partes Deep Sea Electronic …………….…………….…84
Gráfico No 52 Carátula Módulo DSE…………………………………………………..86
Gráfico No 53 Unidad Mobile Test Unit………………………………………………..88
XV
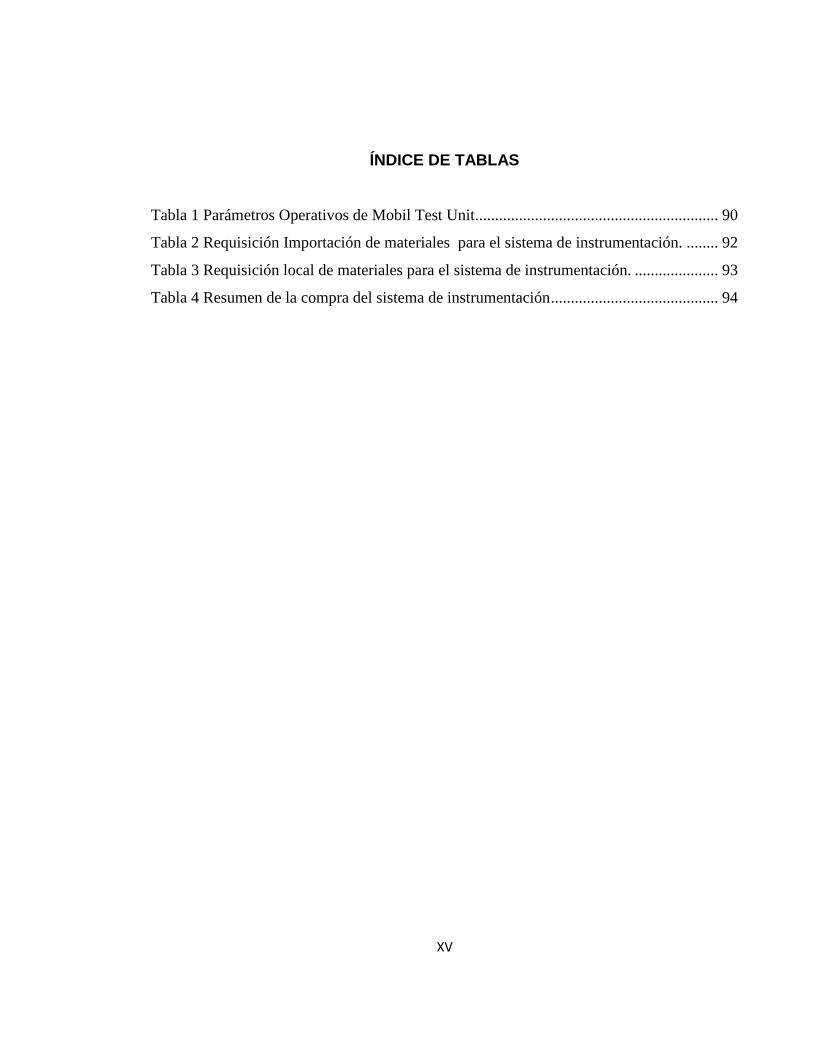
ÍNDICE DE TABLAS
Tabla 1 Parámetros Operativos de Mobil Test Unit............................................................. 90
Tabla 2 Requisición Importación de materiales para el sistema de instrumentación. ........ 92
Tabla 3 Requisición local de materiales para el sistema de instrumentación. ..................... 93
Tabla 4 Resumen de la compra del sistema de instrumentación .......................................... 94

XVI
ÍNDICE DE ANEXOS
Anexo 1 VESSEL DE FLUIDO MOTRIZ / SEPARADOR DE PRODUCCIÓN .............. 98
Anexo 2 INSTRUMENTACIÓN DEEP SEA ELECTRONIC ........................................... 99
Anexo 3 DATA SHEET MÓDULO DEEP SEA ELECTRONIC SERIE 6110/20……..100
Anexo 4 INSTALACIÓN MÓDULO DEEP SEA ELECTRONIC SERIE 6110……..…101

XVII
RESUMEN
La finalidad de esta investigación responde a la necesidad de optimizar el tiempo de
operación de la unidad MTU y tecnificar los equipos reconstruidos los mismos que son
rentados a distintos clientes, este estudio suplirá las necesidades operativas y productivas
para la empresa y el cliente.
Como objetivo principal de la reconstrucción de la Unidad Mobile Test Unit (MTU),
utilizando la instrumentación como medio de protección de esta unidad
Marco referencial: generalidades de system mobile test unit (mtu), ubicación geográfica,
Marco teórico: parte experimental, equipos, planificación, instrumentación y análisis
económico. La conclusión final se refiere a que la Unidad Mobile Test Unit (MTU) es
altamente utilizado para la extracción y evaluación de crudo en producción en la mayoría
de empresas estatales y privadas por tanto es de vital importancia brindar la protección
necesaria para su funcionamiento mediante una instrumentación adecuada.
La recomendación de utilizar los datos más reales posibles para ingresar los datos en el
software obtener mejores resultados.
.
XVIII
ABSTRACT
The purpose of this research responds to the need to optimize the operating time of MTU
and rebuilt equipment technify the same are rented to different customers, this study will
meet the operational needs and productive for the company and the customer.
As the main objective of the reconstruction of the Mobile Unit Test Unit (MTU), using the
instrumentation as a means of protection for this unit
Frame of reference: general system of mobile test unit (MTU), geographic location,
Theoretical framework: the experimental, equipment, planning, implementation and
economic analysis. The final conclusion relates to the Mobile Unit Test Unit (MTU) is
highly used for the extraction and evaluation of oil production in most state and private
enterprises is therefore vital to provide the protection necessary for their operation through
a proper instrumentation.
The recommendation to use the data as real as possible to enter data into the software for
best results.
CAPÍTULO I
1
CAPÍTULO I
1. INTRODUCCIÓN
La finalidad de esta investigación responde a la necesidad de optimizar el tiempo de
operación de la unidad MTU y tecnificar los equipos reconstruidos los mismos que son
rentados a distintos clientes, este estudio satisfacería las necesidades operativas y
productivas para la empresa y el cliente.
1.2. OBJETIVO GENERAL
Mejorar el trabajo de la unidad MOBILE TEST UNIT (MTU) reconstruida de la compañía
Technical System Power, mediante el diseño e instalación de la instrumentación
automática.
1.3. OBJETIVOS ESPECÍFICOS
Diseñar un tablero de control electrónico utilizando un módulo PLC que permita
conectar sensores digitales y analógicos.
Realizar mantenimiento preventivo de acuerdo a las horas de servicio de la unidad
MTU.
Obtener parámetros de operación de una forma ágil y versátil.
Utilizar un modelo de control que permita una fácil operación al personal involucrado.
Diagnosticar posibles daños eventuales en una operación.
2
1.4. HIPÓTESIS O IDEAS A DEFENDER
Con el propósito de dar una respuesta provisional al problema planteado, se realizará la
siguiente hipótesis:
Realizando la implementación del sistema de instrumentación para la Unidad Mobile Test
Unit (MTU) reconstruida de la compañía Technical System Power Cía. Ltda. Optimizara
recursos técnicos y económicos.
1.5. JUSTIFICACIÓN
Hoy en día la mayoría de Empresas que reconstruye maquinaria se despreocupa de instalar
un sistema de instrumentación para proteger su inversión y precautelar la vida del personal
involucrado en su operación.
Es necesario instalar un sistema que nos permita ahorrar tiempo y valorar las posibles fallas
que se presenten en la unidad MTU
Este objetivo permitirá tener un mayor aporte a la producción de la unidad, generando
desarrollo operativo al campo donde se encuentre en alquiler permitiendo que la empresa
pueda crecer técnica y económicamente.
Actualmente la Unidad Mobile Test Unit no posee un sistema de instrumentación para su
operación, motivo por el cual se realizara el diseño de instrumentación para todos sus
componentes.
Este sistema de instrumentación nos permitirá tener una respuesta rápida de protección por
cualquier eventualidad, específicamente parámetros que no se encuentren en los rangos de
operación de la unidad Mobile Test Unit.

3
1.6. PARTE TEÓRICA
La unidad Mobile Test Unit (MTU) sirve para evaluar pozos petroleros utilizando el
método de bombeo hidráulico. Este tipo de bombeo utiliza un fluido motriz para llevar el
petróleo a la superficie (petróleo o agua) este tipo de bombeo consta de una bomba en el
fondo del pozo y en la superficie una bomba de desplazamiento positivo, un separador de
producción y el cabezal pozo.
Gráfico No 1 Mobil Test Unit
Fuente: TPS.CIA.LTDA
Elaborado Por: Jaime Terán M.
4
Esta unidad permite bombear hasta 4000 BDP a 3800 PSI. Su acumulador permite tener un
sistema presurizado, autónomo una vez que se inicia la prueba. Los elementos que hacen
única a nuestra MTU.
La bomba de desplazamiento positivo proporciona la presión para bajar la bomba por la
tubería de producción empujada por un fluido motriz una vez que la bomba se aloja en la
tubería se incrementa la presión de la bomba de desplazamiento positivo para que empiece
a trabajar, el fluido ingresa a la bomba donde se produce un efecto Venturi, al pasar el
fluido motriz por el área más pequeña de la boquilla se produce una depresión en este
punto y aumenta la velocidad lo que genera la succión del fluido de formación entre el
espacio de la boquilla y la garganta.
1.7. METODOLOGÍA
El proyecto de investigación corresponde a una metodología descriptiva, apoyado por un
estudio documental, bibliográfico y de campo.
Al referirse a los estudios descriptivos Ary, Jacobs y Razaviech (1990) manifiestan:
Los estudios de esta índole tratan de obtener información acerca del estado actual de los
fenómenos. Con ello se pretende precisar la naturaleza de una situación tal como existe en
el momento del estudio, el objetivo consiste en describir “lo que existe” con respecto a las
variaciones o a las condiciones de una situación (P.308).
Esta investigación tiene el carácter descriptivo porque se conocerá las características
generales de la unidad MTU. El investigador tendrá que llegar a determinar cómo realizar
la instalación instrumental para dicha unidad.
5
Gutiérrez (1990), al referirse a la investigación bibliográfica manifiesta lo siguiente: “La
investigación bibliográfica consiste en la búsqueda de la información científica en las
bibliotecas. La investigación bibliográfica puede ser realizada independientemente o como
parte de la investigación de campo y de laboratorio”, (P. 38).
Es fundamental la investigación documental porque tiene el propósito de ampliar y
profundizar los conocimientos sobre el tema con apoyo de fuentes bibliográficas y la
orientación que se le dará con criterios técnicos, conclusiones y recomendaciones
adecuadas.
Para complementar el estudio, es obvio que el investigador tendrá que buscar información
documental en libros, revistas, publicaciones o algún otro tipo de documentación que le
permita obtener la mayor cantidad de datos posibles.
Gutiérrez (1990), al referirse a la investigación de campo manifiesta lo siguiente:
La investigación de campo es aquella en la que el mismo objeto de estudio sirve de fuente
de información para el investigador. O es aquella que se lleva a cabo en el campo de los
hechos, o sea en los lugares donde se están desarrollando los acontecimientos por lo que
este tipo de investigación conduce a la observación directa y en vivo, de cosas,
circunstancias en que ocurren ciertos hechos, por este motivo la naturaleza de las fuentes
determinan la manera de obtener datos, (P. 38, 39)
Será investigación de campo porque se realizará el estudio en el entorno natural, es decir,
se realizarán algunas actividades directamente en el Campo como son el estudio de los
6
diseños y el estado actual de cada una de las facilidades petroleras con que cuenta la
compañía Technical System Power.
1.8. UBICACIÓN DEL ÁREA DEL PROYECTO
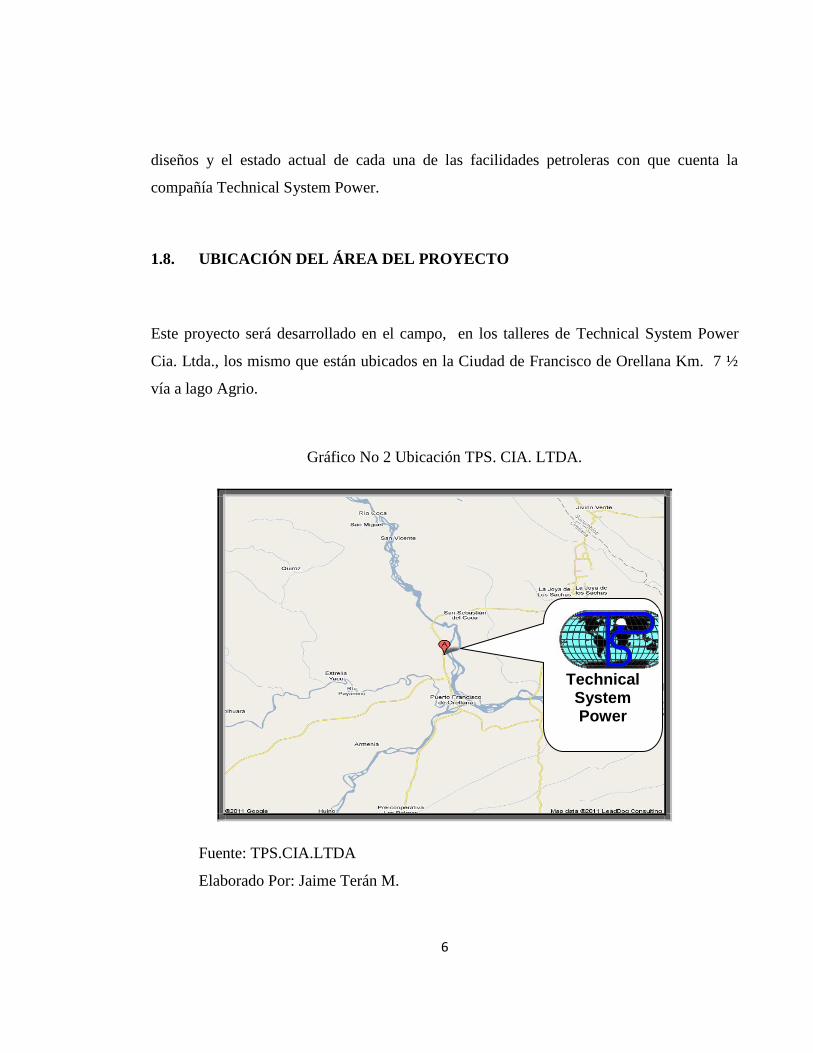
Este proyecto será desarrollado en el campo, en los talleres de Technical System Power
Cia. Ltda., los mismo que están ubicados en la Ciudad de Francisco de Orellana Km. 7 ½
vía a lago Agrio.
Gráfico No 2 Ubicación TPS. CIA. LTDA.
Fuente: TPS.CIA.LTDA
Elaborado Por: Jaime Terán M.
Technical System Power
7
TECHNICAL SYSTEMS POWER CIA. LTDA es una empresa dedicada a la prestación
de Servicios para la Industria Petrolera, mediante la incorporación y desarrollo de nuevos y
mejores procesos en los campos de Ingeniería y un completo sistema administrativo y
técnico que sumados a más de treinta años de experiencia a nivel nacional e internacional,
marcan la diferencia en garantía, servicio y calidad en todos nuestros servicios.
TPS Cia. Ltda. es un grupo serio, confiable, capaz y comprometido a proporcionar servicios
y productos de calidad.
Seguros de poder atender los requerimientos en el momento preciso, satisfaciendo las
necesidades de mejoramiento continuo que están buscando las empresas, y permitiéndonos
de esta manera ser un aliado estratégico en el desarrollo empresarial.
1.9. DEFINICIÓN DE TÉRMINOS BÁSICOS
- Levantamiento Artificial por Bombeo Hidráulico
- Fluido Motriz
- Bomba Jet
- Bomba de Desplazamiento Positivo
- Separador de Producción
- Cabezal del Pozo
- Instrumentación
1.9.1. LEVANTAMIENTO ARTIFICIAL POR BOMBEO HIDRÁULICO
Desde que el Coronel Drake llevo a cabo el descubrimiento de pozos petroleros en
Titusville, Pennsylvania, a fines del siglo diecinueve, miles han sido perforados y
completados en la búsqueda constante del hombre de obtener más y más petróleo en

8
condiciones económicas y eficientes. Hoy en día, literalmente miles de estos pozos
producen cada vez menos, sea por la caída de presión del yacimiento o por que las
estructuras encontradas tienen presiones de formación muy bajas que no logran levantar el
peso de la columna hidrostática Cuando la energía natural del yacimiento no es suficiente
para hacer que un pozo fluya a la superficie en volúmenes suficientes y económicos, la
energía natural debe ser suplementada por medios artificiales. Estos suplementos a la
energía natural se conocen como levantamiento artificial
El sistema de bombeo hidráulico, es el método de levantamiento artificial en el cual, la
energía que opera a la bomba de profundidad es transmitida hidráulicamente, desde una
unidad de poder en superficie.
El principio operativo del bombeo hidráulico, y de todos los sistemas hidráulicos, se basa
en la “Ley de Pascal”.
Esta ley dice que “si ejerce una presión sobre una superficie de un fluido contenido en un
recipiente, ésta se transmite a todas las superficies del mismo con igual intensidad”
Desde una central de fuerza el fluido motriz y para nuestro caso, el petróleo motriz es
bombeado a los diferentes pozos mediante un sistema de distribución de líneas de alta
presión. En cada pozo el petróleo motriz circula hacia abajo por el tubing, opera el motor
hidráulico y la bomba que esta acoplada comienza a bombear descargando el fluido de
formación al espacio anular donde se mezcla con el petróleo motriz, mezcla que llega a la
superficie para recibir los diferentes tratamientos como la separación del agua, gas, petróleo
etc.
• Bombeo hidráulico tipo pistón.
• Bombeo hidráulico tipo jet.
9
1.9.2. FLUIDO MOTRIZ
En los sistemas de bombeo hidráulico, el fluido motriz transmite la potencia a la bomba de
subsuelo y, a la vez, lubrica todas las partes móviles de la misma. El transporte del fluido
motriz y del fluido producido se realiza a través de un sistema de tuberías que depende del
tipo de sistemas de fluido o de potencia: bien sea de fluido cerrado o de fluido abierto
Existen dos tipos de sistemas, el sistema de fluido motriz cerrado, en el cual el fluido
motriz no se mezcla con los fluidos del pozo, regresando por medio de una tubería paralela.
Generalmente se usa este sistema cuando el fluido motriz es agua.
El segundo sistema, es el de fluido motriz abierto y que actualmente se utiliza en la mayoría
de los campos, en el cual los fluidos tanto motriz como de formación se mezclan y llegan a
la superficie por el espacio anular.
1.9.3. BOMBA JET
El bombeo hidráulico tipo Jet, es un mecanismo de producción de pozos petroleros, que
actúa mediante la transferencia de potencia a una bomba de subsuelo con un
fluido presurizado que es bombeado a través de la tubería de producción. La bomba de
subsuelo actúa como un transformador convirtiendo la energía del fluido motriz en energía
potencial o presión sobre los fluidos producidos. La bomba de subsuelo tipo Jet, logra su
acción de bombeo mediante la transferencia de energía entre dos corrientes de
fluidos. La alta presión del fluido motriz enviado desde la superficie pasa a través
de una boquilla donde su energía potencial o presión es convertida en energía cinética en la
forma de chorro de fluido a gran velocidad. El fluido a producir es succionado y
mezclado con el fluido motriz en la garganta de la bomba y llevado a superficie.

10
Gráfico No 3 Bomba Jet de Fondo de Pozo
Fuente: TPS.CIA.LTDA
Elaborado Por: Jaime Terán M.
No requiere de varillas o cables eléctricos para la transmisión de potencia a la bomba de
subsuelo. Es un sistema con dos bombas una en superficie que proporciona el
fluido motriz y una en el fondo que trabaja para producir los fluidos de los pozos. La
bomba de subsuelo puede ser instalada y recuperada hidráulicamente o con unidades de
11
cable. Los fluidos producidos pueden ser utilizados como fluido motriz, su mantenimiento
es de bajo costo y de fácil implementación.
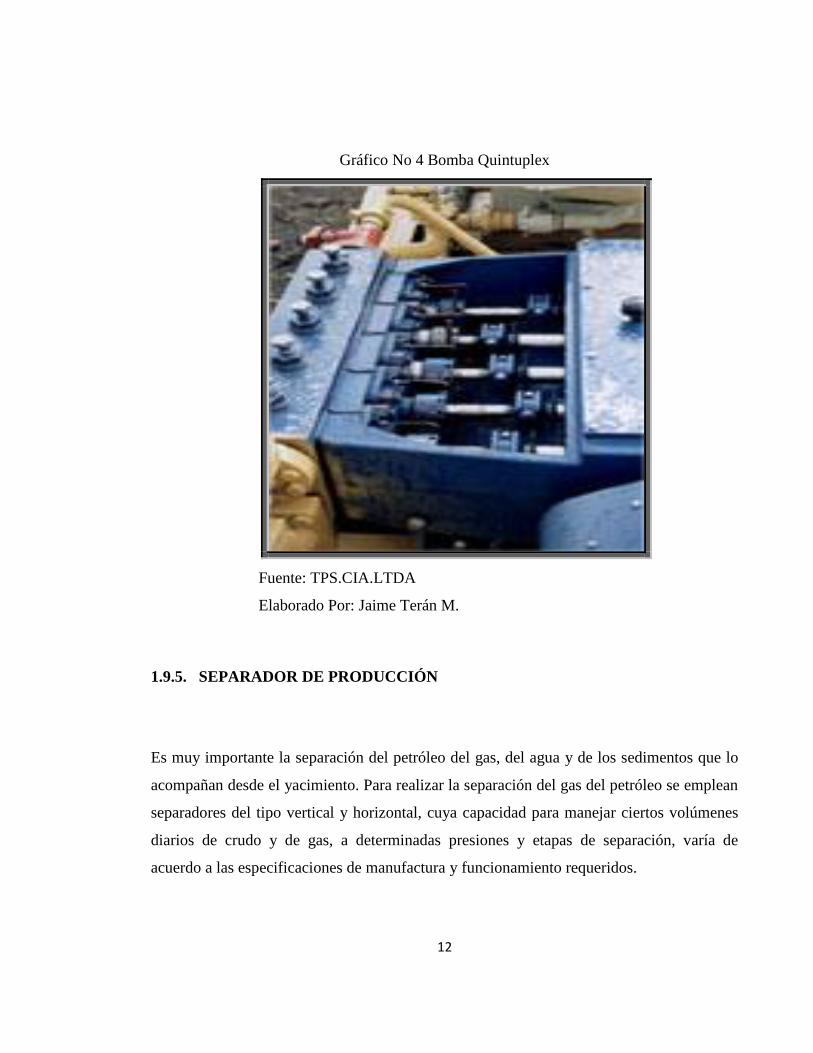
1.9.4 BOMBA DE DESPLAZAMIENTO POSITIVO
Las bombas utilizadas en este tipo de levantamiento para bombear el fluido motriz pueden
ser triples o múltiples. Las que se emplean generalmente, son las triples.
- Bombas Triplex
Estas bombas usan émbolo, camisa de metal a metal, válvula tipo bola.
- Bombas múltiples:
Este tipo de bomba tiene un terminal de potencia y una de fluido. El terminal de potencia
comprende, entre otras partes: el cigüeñal, la biela y los engranajes.
El terminal de fluido está formado por pistones individuales, cada uno con válvulas de
retención y descarga.
Usualmente, estas válvulas están provistas de resorte. Las bombas múltiples más
comúnmente instaladas en el campo son las de configuración horizontal.
12
Gráfico No 4 Bomba Quintuplex
Fuente: TPS.CIA.LTDA
Elaborado Por: Jaime Terán M.
1.9.5. SEPARADOR DE PRODUCCIÓN
Es muy importante la separación del petróleo del gas, del agua y de los sedimentos que lo
acompañan desde el yacimiento. Para realizar la separación del gas del petróleo se emplean
separadores del tipo vertical y horizontal, cuya capacidad para manejar ciertos volúmenes
diarios de crudo y de gas, a determinadas presiones y etapas de separación, varía de
acuerdo a las especificaciones de manufactura y funcionamiento requeridos.
13
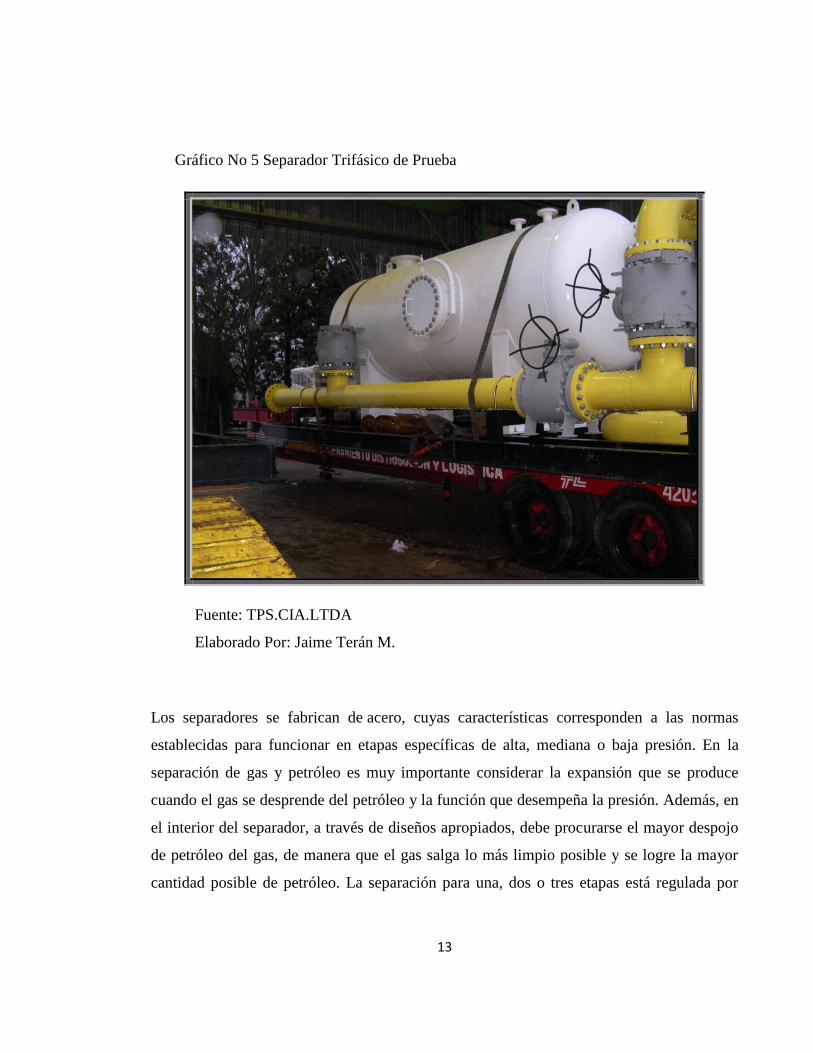
Gráfico No 5 Separador Trifásico de Prueba
Fuente: TPS.CIA.LTDA
Elaborado Por: Jaime Terán M.
Los separadores se fabrican de acero, cuyas características corresponden a las normas
establecidas para funcionar en etapas específicas de alta, mediana o baja presión. En la
separación de gas y petróleo es muy importante considerar la expansión que se produce
cuando el gas se desprende del petróleo y la función que desempeña la presión. Además, en
el interior del separador, a través de diseños apropiados, debe procurarse el mayor despojo
de petróleo del gas, de manera que el gas salga lo más limpio posible y se logre la mayor
cantidad posible de petróleo. La separación para una, dos o tres etapas está regulada por
14
factores tales como la presión de flujo en el cabezal del pozo, la presión con que llega a la
estación, la relación gas-petróleo, la temperatura y el tipo de crudo.
1.9.6. CABEZAL DEL POZO
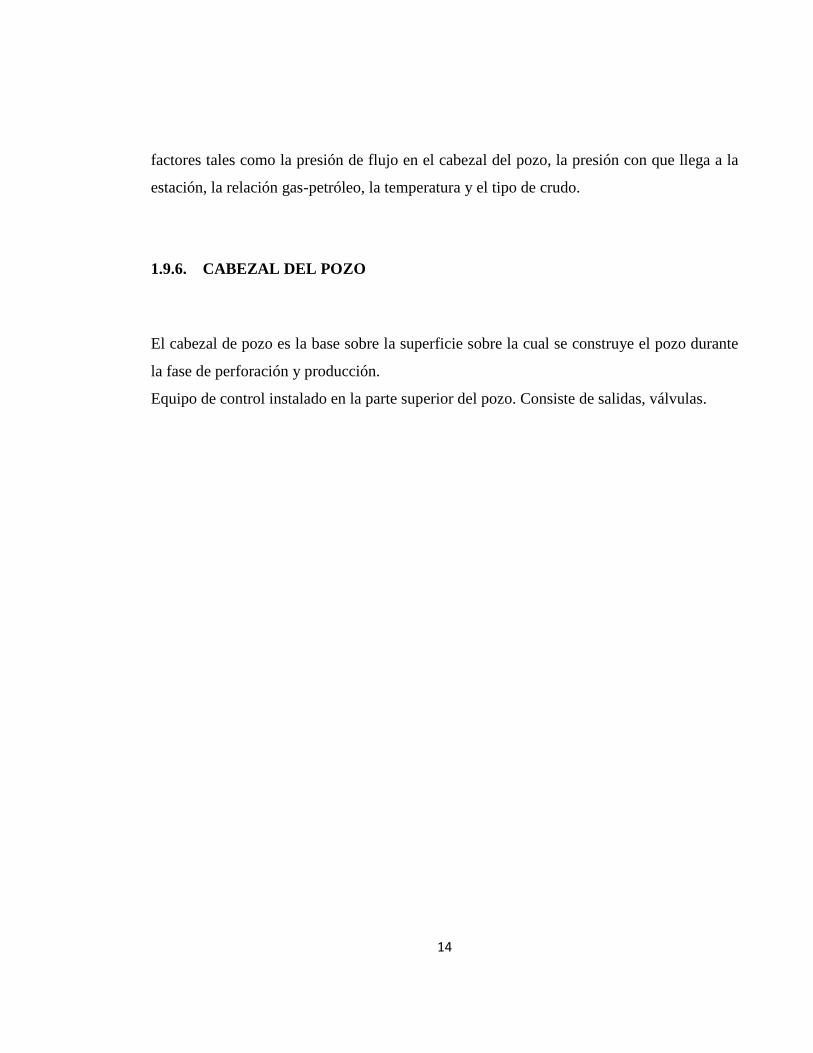
El cabezal de pozo es la base sobre la superficie sobre la cual se construye el pozo durante
la fase de perforación y producción.
Equipo de control instalado en la parte superior del pozo. Consiste de salidas, válvulas.
15
Gráfico No 6 Partes del Cabezal del Pozo
Fuente: Guía Bombeo Hidráulico UTE.
Elaborado Por: Jaime Terán M.
1.9.7. INSTRUMENTACIÓN
Es el grupo de elementos que sirven para medir, controlar o registrar variables de un
proceso con el fin de optimizar los recursos utilizados en éste.
16
El instrumento más conocido y utilizado es el reloj, el cual nos sirve para controlar el uso
eficaz de nuestro tiempo.
En otras palabras, la instrumentación es la ventana a la realidad de lo que está sucediendo
en determinado proceso, lo cual servirá para determinar si el mismo va encaminado hacia
donde deseamos, y de no ser así, podremos usar la instrumentación para actuar sobre
algunos parámetros del sistema y proceder de forma correctiva.
Gráfico No 7 Instrumentos de Control
Fuente: TPS.CIA.LTDA
Elaborado Por: Jaime Terán M.
CAPÍTULO II
17
CAPÍTULO II
2. PARTE EXPERIMENTAL
La parte experimental de este proyecto está basado en el estudio de cada uno de los
componentes de la unidad MTU que se encuentran en la superficie y en el fondo del pozo.
de esta manera nos familiarizamos con el equipo y podemos comenzar a implementar el
sistema de instrumentación a la unidad Mobile Test Unit .
2.1. EQUIPOS DE LA UNIDAD MOBILE TEST UNIT
Existe una amplia gama de equipos que complementan a la unidad Mobile Test Unit, estos
equipos son de marcas reconocidas, con un amplio stock de repuestos y servicio técnico
para casos de mantenimiento preventivo y correctivo.
2.1.1. TANQUES D E ALMACENAMIENTO, TANQUES D E LAVADO,
SEPARADORES Y / O TRATADORES
Cuando se utiliza petróleo como fluido de potencia en un sistema abierto, dicho fluido se
obtiene de tanques de almacenamiento o de oleoductos, de donde se suministran al sistema
de bombeo o de distribución. Si se está en un sistema cerrado, el fluido de potencia, bien
sea agua o petróleo es manejado en un circuito cerrado, el cual debe disponer de su propio
18
tanque de almacenamiento y equipos de limpieza de sólidos, estos equipos operan
independientemente de las operaciones en las estaciones de producción.
2.1.2. BOMBAS DE SUPERFICIE
Las bombas utilizadas en este tipo de levantamiento para bombear el fluido motor pueden
ser triples o múltiples.
2.1.3. MÚLTIPLES DE CONTROL
Cuando se opera una cantidad apreciable de pozos desde una batería central, se suele usar
un múltiple de control para dirigir los flujos directamente a cada uno de los pozos
Medidores de flujo global o individual para cada pozo se pueden instalar en el múltiple de
control de fluido de potencia. Para regular y/o distribuir el suministro de fluido de potencia
a uno o más pozos, se usan varios tipos de válvulas de control. La válvula común a todos
los sistemas de bombeo libre es la de cuatro vías o válvula control del cabezal del pozo.
2.1.4. VÁLVULA DE CONTROL
Una válvula de control de presión constante regula la presión en el lado común de fluido de
potencia del múltiple. Esta presión, generalmente, es mayor que la presión más alta
19
requerida por cualquiera de los pozos. La válvula de control de flujo consta la cantidad de
fluido de potencia que se necesita en cada pozo cuando se emplea una bomba reciprocarte.
2.1.5. LUBRICADOR
Es una pieza de tubería extendida con una línea lateral para desviar el flujo de fluido
cuando se baja o se extrae la bomba del pozo. También se utiliza para controlar la presencia
de gases corrosivos que pueden obstaculizar la bajada de la bomba o su remoción del pozo.
2.1.6. MOTOR DE COMBUSTIÓN INTERNA
Un motor diesel funciona mediante la ignición (encendido) del combustible al ser inyectado
muy pulverizado y con alta presión en una cámara (o pre cámara, en el caso de inyección
indirecta) de combustión que contiene aire a una temperatura superior a la temperatura de
auto combustión, sin necesidad de chispa como en los motores de gasolina. Ésta es la
llamada auto inflamación.
La temperatura que inicia la combustión procede de la elevación de la presión que se
produce en el segundo tiempo del motor, la compresión. El combustible se inyecta en la
parte superior de la cámara de combustión a gran presión desde unos orificios muy
pequeños que presenta el inyector de forma que se atomiza y se mezcla con el aire a alta
temperatura y presión (entre 700 y 900 °C). Como resultado, la mezcla se inflama muy
20
rápidamente. Esta combustión ocasiona que el gas contenido en la cámara se expanda,
impulsando el pistón hacia abajo.
Esta expansión, al revés de lo que ocurre con el motor de gasolina, se hace a presión
constante ya que continúa durante la carrera de trabajo o de expansión. La biela transmite
este movimiento al cigüeñal, al que hace girar, transformando el movimiento lineal del
pistón en un movimiento de rotación.
Para que se produzca auto inflamación es necesario alcanzar la temperatura de inflamación
espontánea del gasóleo. En frío es necesario pre-calentar el gasóleo o emplear combustibles
más pesados que los empleados en el motor de gasolina, empleándose la fracción de
destilación del petróleo fluctuando entre los 220 °C y 350 °C, que recibe la denominación
de gasóleo o gasoil en inglés.
21
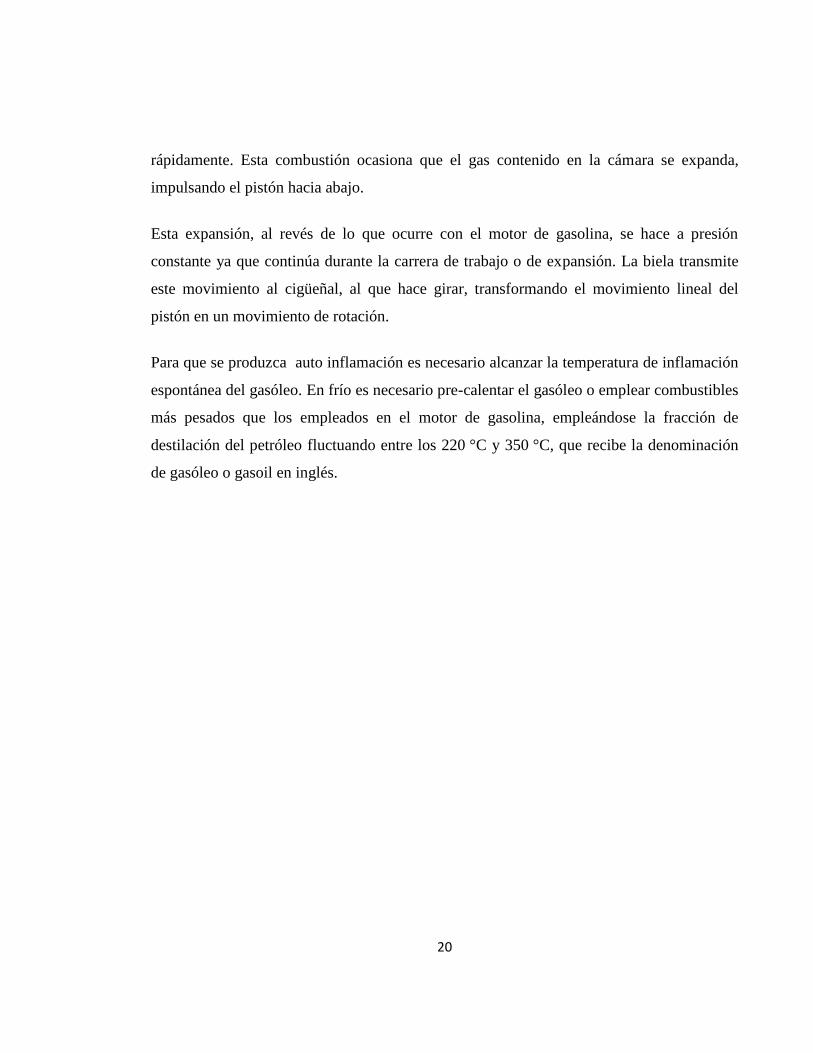
Gráfico No8 Motor a Diesel de Combustión Interna
Fuente: TPS.CIA.LTDA
Elaborado Por: Jaime Terán M.
2.1.6.1. Ventajas y desventajas
La principal ventaja de los motores diesel, comparados con los motores a gasolina, es su
bajo consumo de combustible.
En automoción, las desventajas iníciales de estos motores (principalmente precio, costos de
mantenimiento y prestaciones) se están reduciendo debido a mejoras como la inyección
electrónica y el turbocompresor. No obstante, la adopción de pre cámara para los motores

22
de automoción, con la que se consiguen prestaciones semejantes a las de los motores de
gasolina, presenta el inconveniente de incrementar el consumo, con lo que la principal
ventaja de estos motores prácticamente desaparece.
Gráfico No 4 Motor Caterpillar 3406
Fuente: TPS.CIA.LTDA
Elaborado Por: Jaime Terán M.

23
2.1.7. TRANSMISIÓN MECÁNICA
Se denomina transmisión mecánica a un mecanismo encargado de transmitir potencia entre
dos o más elementos dentro de una máquina. Son parte fundamental de los elementos u
órganos de una máquina, muchas veces clasificados como uno de los dos subgrupos
fundamentales de estos elementos de transmisión y elementos de sujeción.
En la gran mayoría de los casos, estas transmisiones se realizan a través de elementos
rotantes, ya que la transmisión de energía por rotación ocupa mucho menos espacio que
aquella por traslación.
Una transmisión mecánica es una forma de intercambiar energía mecánica distinta a las
transmisiones neumáticas o hidráulicas, ya que para ejercer su función emplea el
movimiento de cuerpos sólidos, como lo son los engranajes y las correas de transmisión.
Típicamente, la transmisión cambia la velocidad de rotación de un eje de entrada, lo que
resulta en una velocidad de salida diferente.
En general, las transmisiones reducen una rotación inadecuada, de alta velocidad y bajo par
motor, del eje de salida del impulsor primario a una velocidad más baja con par de giro más
alto, o a la inversa. Muchos sistemas, como las transmisiones empleadas en los
automóviles, incluyen la capacidad de seleccionar alguna de varias relaciones diferentes.
En estos casos, la mayoría de las relaciones (llamadas usualmente "marchas" o "cambios")
se emplean para reducir la velocidad de salida del motor e incrementar el par de giro; sin
embargo, las relaciones más altas pueden ser sobre marchas que aumentan la velocidad de
salida.
24
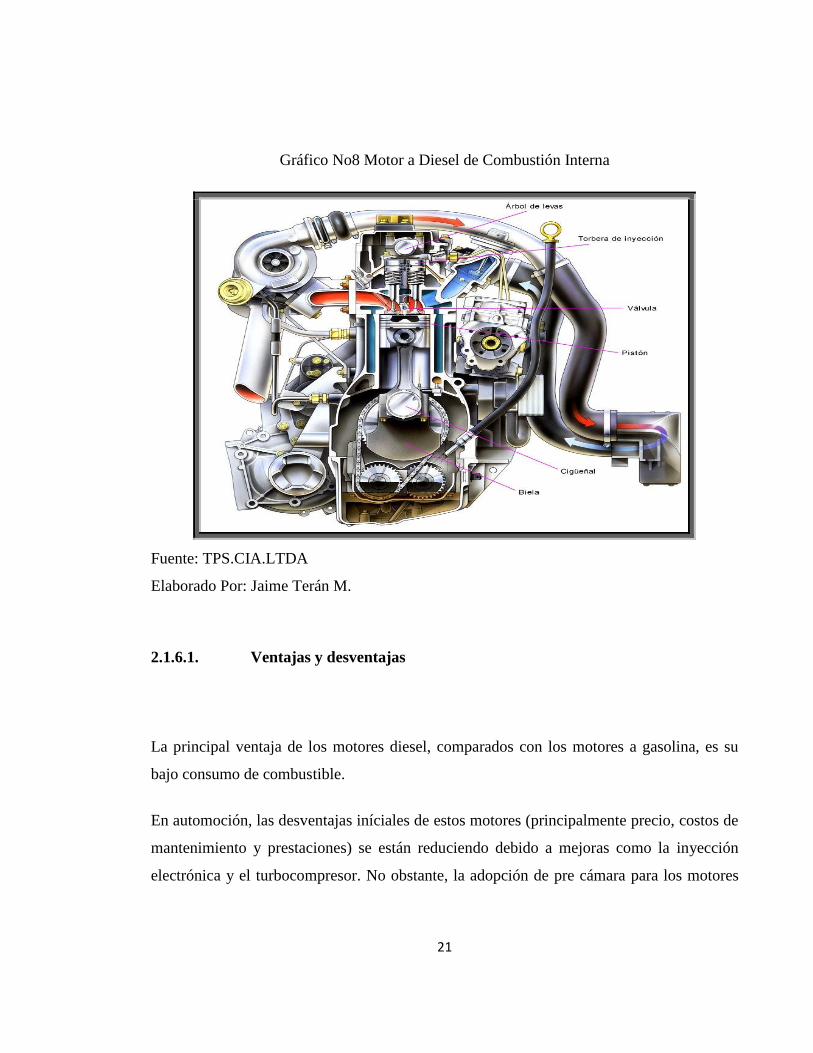
También se emplean transmisiones en equipamiento naval, agrícola, industrial,
construcciones de minería y petróleo.
Gráfico No 5 Transmisión Mecánica
Fuente: Manual de Servicio EATON
Elaborado Por: Jaime Terán M.
25
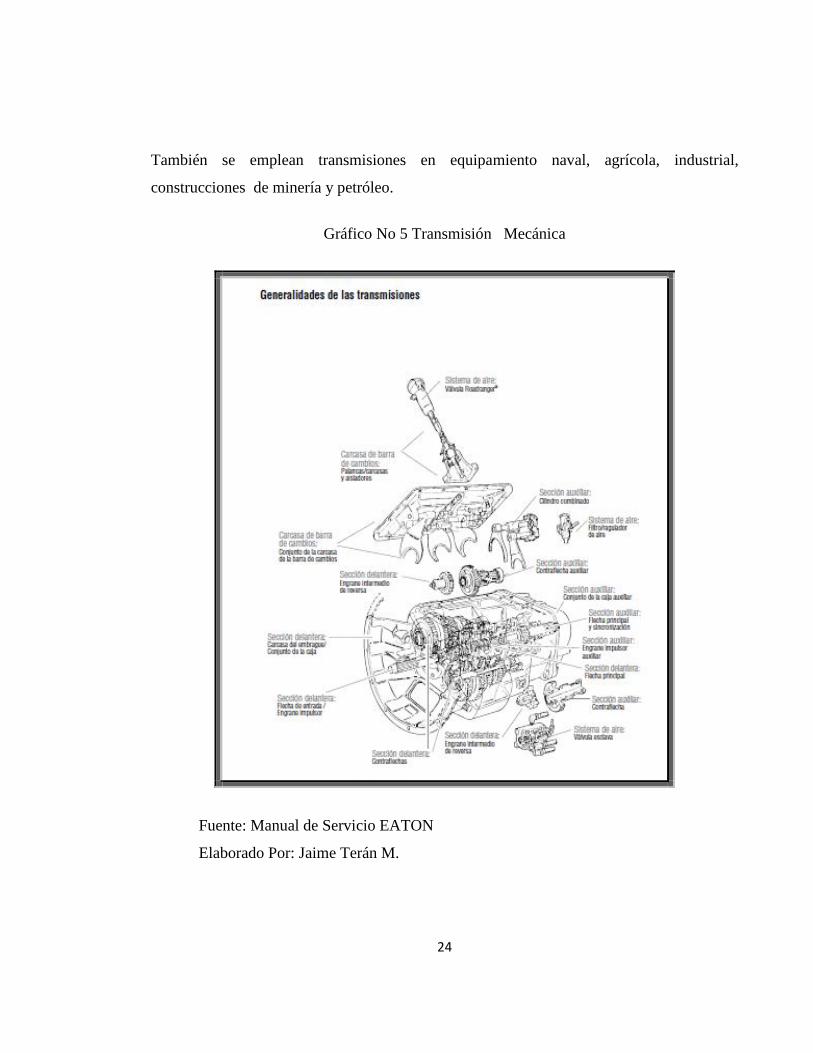
Gráfico No 6 Partes transmisión Mecánica
Fuente: Manual de Servicio EATON
Elaborado Por: Jaime Terán M.
26
2.1.8. BOMBA DE DESPLAZAMIENTO POSITIVO
Estas bombas guían al fluido que se desplaza a lo largo de toda su trayectoria, el cual
siempre está contenido entre el elemento impulsor, que puede ser un embolo, un diente de
engranaje, un aspa, un tornillo, etc., y la carcasa o el cilindro. “El movimiento del
desplazamiento positivo” consiste en el movimiento de un fluido causado por la
disminución del volumen de una cámara. Por consiguiente, en una máquina de
desplazamiento positivo, el elemento que origina el intercambio de energía no tiene
necesariamente movimiento alternativo (émbolo), sino que puede tener movimiento
rotatorio (rotor).
Sin embargo, en las máquinas de desplazamiento positivo, tanto reciprocantes como
rotatorias, siempre hay una cámara que aumenta de volumen (succión) y disminuye
volumen (impulsión), por esto a éstas máquinas también se les denomina Volumétricas.
2.1.9. BOMBAS RECIPROCANTES
Llamadas también alternativas, en estas máquinas, el elemento que proporciona la energía
al fluido lo hace en forma lineal y alternativa. La característica de funcionamiento es
sencilla.
27
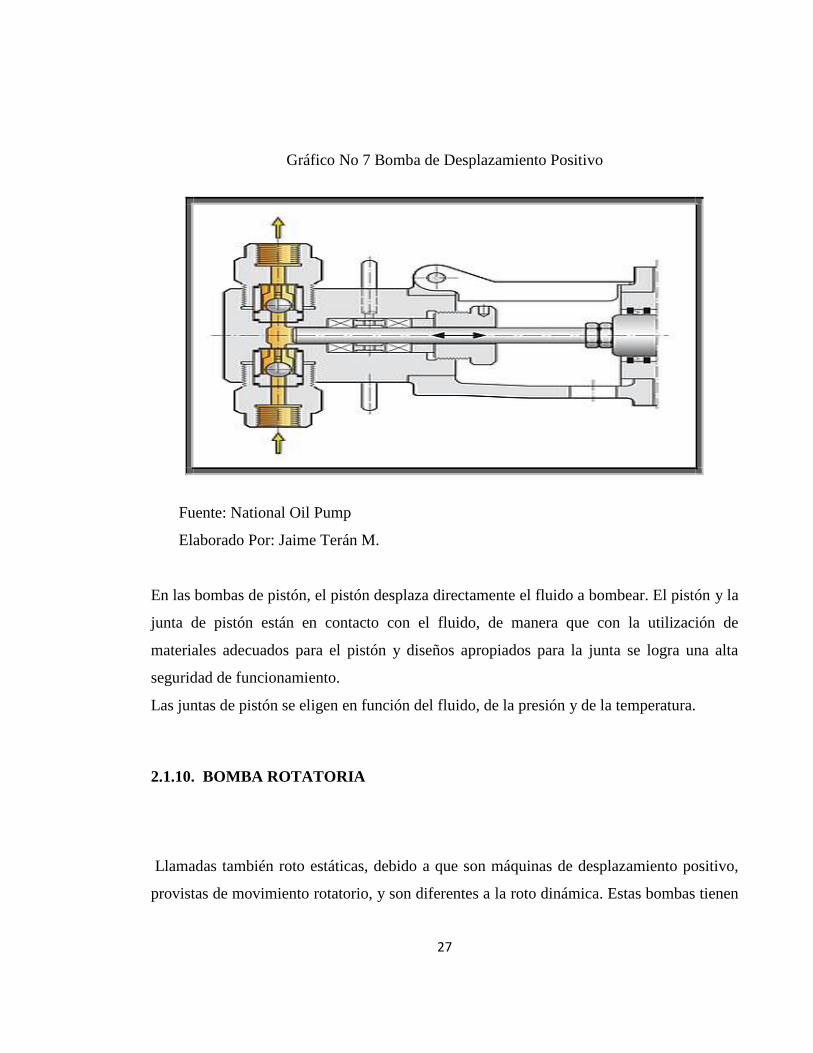
Gráfico No 7 Bomba de Desplazamiento Positivo
Fuente: National Oil Pump
Elaborado Por: Jaime Terán M.
En las bombas de pistón, el pistón desplaza directamente el fluido a bombear. El pistón y la
junta de pistón están en contacto con el fluido, de manera que con la utilización de
materiales adecuados para el pistón y diseños apropiados para la junta se logra una alta
seguridad de funcionamiento.
Las juntas de pistón se eligen en función del fluido, de la presión y de la temperatura.
2.1.10. BOMBA ROTATORIA
Llamadas también roto estáticas, debido a que son máquinas de desplazamiento positivo,
provistas de movimiento rotatorio, y son diferentes a la roto dinámica. Estas bombas tienen
28
muchas aplicaciones según el elemento impulsor. El fluido sale de la bomba en forma
constante, puede manejar líquidos que contengan aire o vapor. Su principal aplicación es la
de manejar líquidos altamente viscosos, lo que ninguna otra bomba puede realizar y hasta
puede carecer de válvula de admisión de carga.
2.1.11. VESSEL DE FLUIDO MOTRIZ / SEPARADOR DE PRODUCCIÓN
El separador es un recipiente en el cual una mezcla de fluidos que no son solubles entre sí,
se separan el uno con el otro.
En las estaciones de recolección y tratamiento de petróleo se utilizan los separadores para
separar el gas natural, agua, sedimentos y materiales del crudo, que arrastra consigo el flujo
de hidrocarburos provenientes de los yacimientos.
Existe en la industria un conjunto variable de formas y tamaños en los separadores, equipos
muy utilizados para las diferentes fases de la industria petrolera.
El número de fluidos a segregar o separarse es usualmente de dos o tres; de acuerdo a esta
denominación, el separador podrá ser del tipo de dos fases (por ejemplo gas y líquido) o del
tipo de tres fases como gas, hidrocarburos líquidos y agua. El número de fases se refiere al
número de corrientes que salen del separador y no al número de fases que hay dentro de él.
Ver Anexo No 1
2.1.11.1. Funcionamiento
Imaginemos lo que sucede cuando se vierte gasolina sobre un recipiente abierto. El gas
líquido. En este caso la separación se habrá producido a presión atmosférica (14,7 lppc) y a
29
temperatura ambiente 90 F, por ejemplo: Cuando cambian las condiciones de presión y
temperatura a la cual se produce la separación, también cambiará la cantidad de gas y/o de
líquido que se separa de la corriente. La cantidad de líquido que permanece en el fondo del
recipiente será tanto mayor cuando más alta sea la presión y más baja la temperatura (P y
T).
De la misma manera, para cada patrón de P y T, será diferente la composición del gas y del
líquido que se separan en la unidad. Desde el punto de vista práctico estas composiciones se
pueden calcular teóricamente. La actividad se conoce como “Separación instantánea”
(“flash calculation”).
Hasta hace algunos años estos cálculos eran sumamente fastidiosos y se requerían de varias
horas para conocer la cantidad de líquido y la composición resultante mediante
simuladores.
No obstante, el ingeniero se debe mantener siempre alerta para interpretar la veracidad de la
respuesta que eventualmente arroje un determinado simulador, porque es muy común que
la persona se equivoque al introducir la información y, por lo tanto, sean erróneos los
resultados.
Así, cuando se desea diseñar un separador, lo primero que deberá hacerse es calcular la
cantidad de líquido que permanecerá en el fondo del recipiente y las respectivas
composiciones y características de las fases que se separan. Eso servirá de punto de apoyo
para hacer el diseño conceptual.
2.1.11.2. Eliminación de líquido del gas
La separación de los líquidos del gas empieza a medida que el reservorio se pone en
comunicación con la superficie a través del pozo, debido básicamente a la liberación
30
instantánea de las moléculas de gas en atención a la disminución de la presión; esta
separación aumenta progresivamente a través de la tubería vertical dentro del pozo y
horizontal desde la cabeza del pozo hasta la estación de recolección y tratamiento de los
hidrocarburos.
Bajo ciertas condiciones de presión y temperatura así como de diseño de las líneas de flujo,
el fluido puede ser completamente separado en líquido y gas antes de que llegue al
separador; en este caso el separador suministra el espacio mediante el cual se realiza la
separación final. La diferencia de densidades de los hidrocarburos líquidos y gaseosos
permite desarrollar una separación aceptable.
2.1.11.3. Eliminación de gas del líquido
La mayoría de los petróleos crudos están saturados con gas natural a presiones y
temperaturas de yacimientos. Las características físico – químicas del petróleo y sus
condiciones de presión y temperatura determinan la cantidad de gas que tiene un
determinado volumen másico de hidrocarburos; en consecuencia, la tasa a la cual el gas
natural es liberado de dicho fluido está directamente relacionado con la presión del
yacimiento y a la temperatura de operación del separador.
2.1.11.4. Partes constitutivas de un separador de gas
Un separador sin importar la forma como se halle constituido se divide básicamente en
cuatro secciones:
a. Sección de separación primaria o inicial.
b. Sección secundaria o de ajuste gravitacional.
31
c. Sección de extracción de neblina o sección de aglutinación.
d. Sección de sumidero o sistema de eliminación del líquido.
a. Sección de separación primaria o inicial
En esta sección se separa la parte de liquida de la corriente de gas reduciendo también la
turbulencia del fluido. Para conseguir este efecto, es necesario producir un cambio de
dirección del fluido mediante la ayuda de boquillas generalmente tangenciales, lengüetas
desviadas o con la ayuda de deflectores ubicados adecuadamente. Con cualquiera de las tres
formas para producir dicho efecto se induce una fuerza centrífuga al flujo, con lo que
separara un gran volumen de líquido.
b. Sección secundaria o de ajuste gravitacional
Esta sección ha sido diseñada para conseguir la separación de la mayor cantidad de gotas de
líquido de la corriente de gas, las gotas se separan principalmente por gravedad por lo que
la turbulencia del flujo debe ser mínima. Para desarrollar este proceso el separador deberá
tener suficiente longitud.
En muchos de los separadores se utiliza aspas o veletas con la finalidad de reducir a un
menor grado la turbulencia del flujo a más de servir como superficies colectoras de gotas de
líquido.
La eficiencia de la separación en esta sección depende básicamente de las propiedades
físicas del gas y del líquido, del tamaño de las gotas del líquido suspendidas en la corriente
del gas y del grado de turbulencia.

32
c. Sección de extracción de neblina o aglutinación
En esta sección, se separa las pequeñas gotas de líquido del gas que no han sido separadas
en las dos etapas anteriores.
El principio que se utiliza para el efecto es el choque y la fuerza centrífuga. Las pequeñas
gotas separadas son colectadas a recipientes adecuados en donde la acumulación de éstas
forman gotas más grandes que por gravedad descienden al depósito de hidrocarburos en el
separador.
El dispositivo diseñado y construido para el efecto toma el nombre de extractor de niebla, el
mismo que se encuentra constituido por un conjunto de veletas o aspas, alambre entretejido,
o por tubos ciclónicos.
d. Sumidero o sistema de eliminación del líquido
En esta sección se almacena y descarga el líquido separado de la corriente de gas. Esta
parte del separador debe tener la capacidad suficiente para manejar los volúmenes
acumulados de petróleo para lo cual es necesario una instrumentación adecuada, sean estos
indicadores de nivel, flotadores y válvulas de descarga.
La sección de almacenamiento de líquidos debe ubicarse en el separador de tal forma que el
líquido acumulado no sea arrastrado por la corriente de gas que fluye a través del separador.
2.1.12. Clasificación de los separadores
Los separadores sin importar su clasificación tienen la misma función que es la de separar
los fluidos que son extraídos del fondo del pozo, y con esta separación incrementamos la

33
producción de petróleo y en el caso de los separadores de prueba nos ayuda a conocer las
características de los petróleos que se extraen en cada pozo.
La utilidad de un separador depende del trabajo y las necesidades que se requieren al
momento de la separación de los fluidos.
Los separadores son clasificados tomando en cuenta su diseño, su función y las fases que va
a separar.
Por su función en:
• Prueba
• Producción.
Gráfico No 13 Separador de Producción
Fuente: TPS.CIA.LTDA
Elaborado Por: Jaime Terán M.
34
a) Separadores de Prueba
Son separadores como anteriormente lo señalamos nos ayuda a determinar las
características físico-químicas de un fluido el cual es extraído de un pozo establecido y de
esta forma saber las propiedades de ese yacimiento.
b) Separadores de Producción
Estos separadores sirven para separar el petróleo, del gas y del agua sin importar el pozo
del que proviene ya que estos separadores mejoran la producción de petróleo disminuyendo
el contenido de impurezas.
Por su diseño se clasifican en:
• Verticales y
• Horizontales (de un tubo o doble tubo).
Los separadores según el diseño se los selecciona considerando varios factores que son:
el trabajo que va a realizar, la disponibilidad de espacio y las ventajas y desventajas que
presentan cada uno de ellos.
2.2 EQUIPO DE FONDO
Los equipos de fondo en el sistema Mobile Test Unit tienen constantemente un
mantenimiento preventivo, por ser equipos de evaluación de productividad de los pozos
35
petroleros, por tal razón estos equipos siempre tienen que estar en condiciones óptimas de
operación, minimizando el tiempo de cada evaluación en el campo.
2.2.1. BOMBA HIDRÁULICA JET
El bombeo hidráulico tipo Jet, es un mecanismo de producción de pozos petroleros, que
actúa mediante la transferencia de potencia a una bomba de subsuelo con un fluido
presurizado que es bombeado a través de la tubería de producción. La bomba de subsuelo
actúa como un transformador convirtiendo la energía del fluido motriz en energía potencial
o presión sobre los fluidos producidos.
Esta clase de equipo no tiene partes móviles, lo que la hace resistente a los fluidos
corrosivos y abrasivos. Además, s adapta a todos los ensamblajes de fondo del bombeo
hidráulico tiene alta capacidad y puede manejar el gas libre del pozo, pero requiere mayores
presiones a su entrada que las bombas convencionales, para evitar la cavitación. Su
eficiencia es menor que la de los equipos de desplazamiento positivo, por lo cual necesita
mayor potencia.
Es un equipo hidrodinámico y opera, principalmente, a través de la transferencia de
momento entre dos corrientes de fluido adyacentes. El fluido de potencia de alta presión
pasa a través de la boquilla, donde la energía potencial del fluido (energía de presión) se
transforma en energía cinética.
Esto hace que el chorro de fluido adquiera altas velocidades. La mezcla del fluido del pozo
con el fluido de potencia, en un área constante del conducto o tubo de mezcla, hace que se
transfiera cierta cantidad de movimiento al fluido del pozo.
36
Los fluidos son conducidos a un difusor de área expandida, que convierte la energía
cinética remanente en presiones estáticas suficiente para levantar los fluidos hasta la
superficie.
Los tamaños físicos de la boquilla y el conducto de mezcla determinan las tasas de flujo;
mientras que la relación de sus áreas de flujo establece la relación entre el cabezal
producido y la tasa de flujo.
La bomba de subsuelo tipo Jet, logra su acción de bombeo mediante la transferencia de
energía entre dos corrientes de fluidos. La alta presión del fluido motriz enviado desde la
superficie pasa a través de una boquilla donde su energía potencial o presión es convertida
en energía cinética en la forma de chorro de fluido a gran velocidad. El fluido a producir es
succionado y mezclado con el fluido motriz en la garganta de la bomba y llevado a
superficie.
2.2.2. CARACTERÍSTICAS DEL BOMBEO HIDRÁULICO TIPO JET.
No requiere de varillas o cables eléctricos para la transmisión de potencia a la bomba de
subsuelo. Es un sistema con dos bombas una en superficie que proporciona el fluido motriz
y una en el fondo que trabaja para producir los fluidos de los pozos. La bomba de subsuelo
puede ser instalada y recuperada hidráulicamente o con unidades de cable. Los fluidos
producidos pueden ser utilizados como fluido motriz. Su mantenimiento es de bajo costo y
de fácil implementación.
Entre las ventajas y beneficios más importantes tenemos:
Flexibilidad en la rata de producción.
37
Cálculo de la Pwf en condiciones fluyentes por el programa de diseño.
La bomba Jet no tiene partes móviles lo que significa alta duración y menor tiempo
en tareas de mantenimiento.
Puede ser instalada en pozos desviados.
Pueden ser fácilmente operadas a control remoto.
Puede bombear todo tipo de crudos, inclusive crudos pesados.
Las bombas de subsuelo pueden ser circuladas o recuperadas hidráulicamente. Esta
ventaja es muy importante porque reduce los requerimientos de los equipos de
reacondicionamiento (workover) para hacer el mantenimiento a los equipos de
subsuelo.
La bomba Jet es fácilmente optimizada cambiando el tamaño de la boquilla y la
garganta.
Muy apropiadas para instalación de medidores de presión debido a su baja
vibración.
Muy apropiadas para zonas urbanas o cerca de zonas urbanas, plataformas costa
afuera y zonas ambientalmente sensibles.
Puede manejar fluidos contaminados con CO2, SO2, gas y arena.
Bajos costos de equipos de subsuelo comparado con otros sistemas de
levantamiento artificial.
Con las nuevas tecnologías en sistemas de bombeo en superficie, se pueden lograr
paquetes de bajos costos de inversión, bajos costos de mantenimiento y máximo
desempeño.
Se pueden instalar sistemas centralizados de bombeo donde un grupo de equipos de
bombeo en superficie suministra el fluido motriz a varios pozos simultáneamente.
El concepto es similar a los sistemas de disposición de agua o a sistemas de bombeo
neumático. .
38
No se requiere taladros de workover para atender el mantenimiento del pozo
reduciendo de manera sustancial el OPEX.
Menos pérdida de tiempo durante el servicio al pozo, reduciendo las pérdidas de
producción.
El mantenimiento de los equipos es muy bajo y por lo tanto se requiere de un
inventario mínimo de partes de repuesto.
2.3. INSTRUMENTACIÓN
La instrumentación es lo que ha permitido el gran avance tecnológico de la ciencia actual
en casos tales como: los viajes espaciales, la automatización de los procesos industriales y
mucho otros de los aspectos de nuestro mundo moderno; ya que la automatización es solo
posible a través de elementos que puedan censar lo que sucede en el ambiente, para luego
tomar una acción de control pre-programada que actué sobre el sistema para obtener el
resultado previsto.
En este proyecto la implementación de la instrumentación es un factor muy importante para
proteger al personal que opera la unidad y proteger a los equipos que componen el sistema
Mobile Test Unit.
CAPÍTULO III
39
CAPÍTULO III
3. RESULTADOS Y DISCUSIÓN DE LA IMPLEMENTACIÓN DE
INSTRUMENTACIÓN A LA UNIDAD MOBIL TEST UNIT (MTU)
La implementación de instrumentación a la unidad Mobile Test Unit se refiere al grupo de
elementos que sirven para medir, convertir, transmitir, controlar o registrar variables de un
proceso, con el fin de optimizar los recursos utilizados. Estas variables a medir pueden ser
presión, temperatura, vibración y velocidad.
Gracias a la simplificación de la configuración del modulo Deep Sea Electronic y los
diversos sensores de la unidad Mobile Test Unit (MTU) tienen la capacidad de hacer que la
implementación del modulo DSE en la Unidad Mobile Test Unit sea más accesible en
términos de costos, ayudando a que las compañías reduzcan su dependencia de los
consultores expertos, generalmente muy caros. Estos módulos DSE especialmente están
recomendados para los equipos que poseen un motor de combustión interna.
Al final de la presente implementación de instrumentación el modulo DSE trabajara en
conjunto con todos los sensores del motor y bomba de la unidad Mobile Test Unit.
3.1. SENSORES DEL MOTOR
Los sensores del motor son dispositivos que miden de manera automática una variable de
un proceso para transmitir esa información hacia el modulo de control de la unidad de esta
manera controlamos y protegemos de una forma precisa y segura.
40
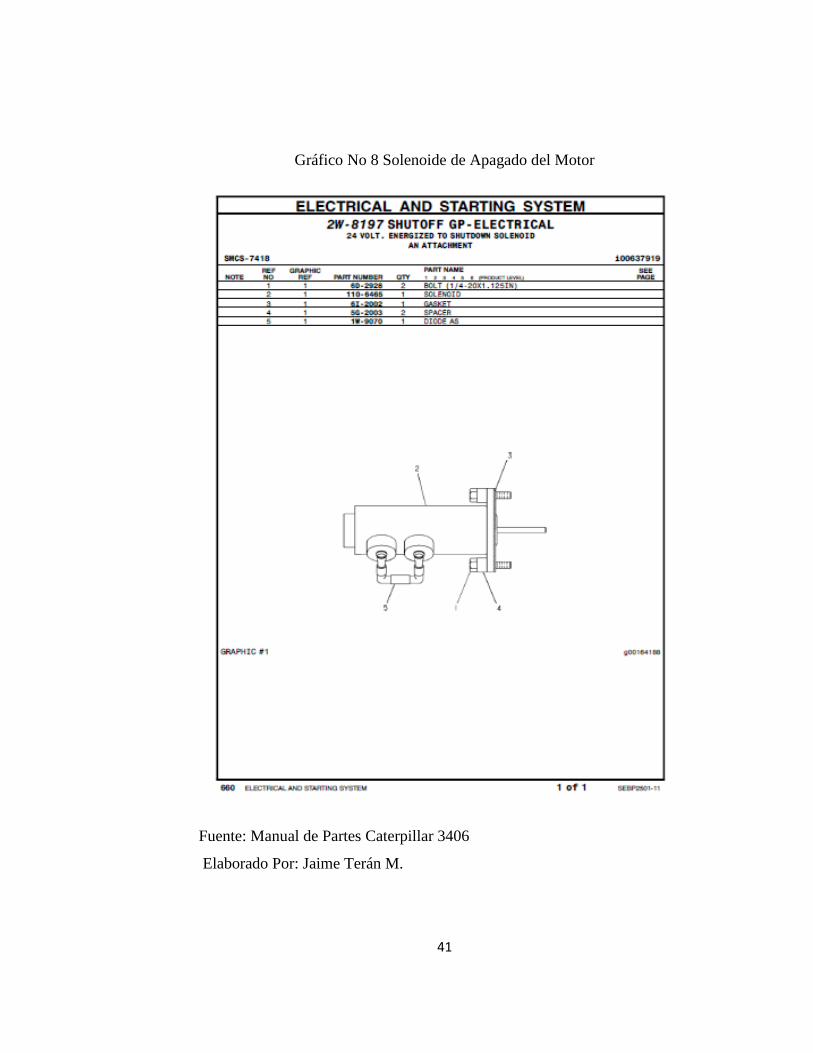
3.1.1. SOLENOID SHUTOFF 24V.
Es un electroimán se encuentra ensamblado en la bomba de inyección controlando la
cremallera del gobernor de velocidad del motor. Esta constituido de un electroimán y un
embolo que abre y cierra el paso de combustible del motor.
La bobina trabaja con un voltaje de 24 VDC, cada vez que la bobina recibe el voltaje se
energiza accionando el embolo hacia adentro de la bobina o electroimán.
Este componente corta el paso de combustible hacia la cámara de inyección del motor.
Esta válvula será el componente esencial o primordial dentro del sistema del conjunto
motor-bomba, cuando ocurra un cambio en las variables de temperatura y presión y/o
vibración los sensores correspondientes a cada variable enviaran una señal hacia el módulo
DEEP SEA ELECTRONIC Ubicado en el tablero de control este a su vez envía la señal
interna al relé de control de la válvula de combustible, el cual enviara una señal al
solenoide para que cierre el paso de combustible y el motor se apague.
Este componente corta el paso de combustible hacia la cámara de inyección del motor.
41
Gráfico No 8 Solenoide de Apagado del Motor
Fuente: Manual de Partes Caterpillar 3406
Elaborado Por: Jaime Terán M.
42
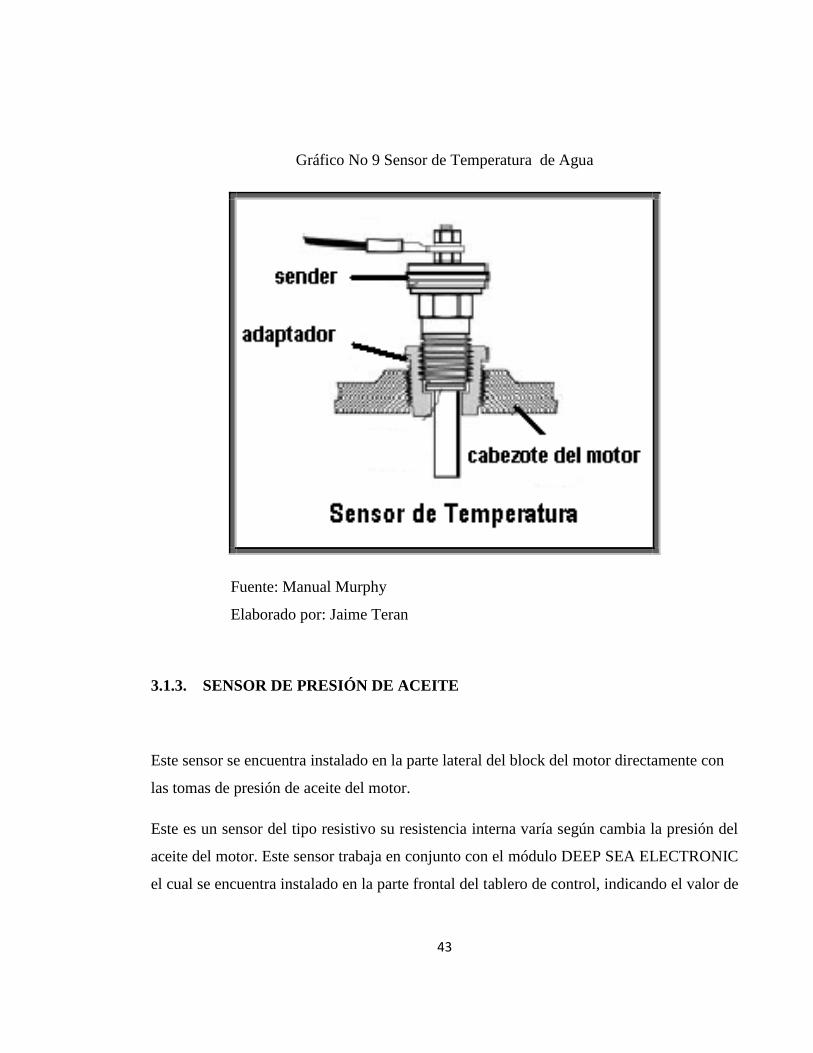
3.1.2. SENSOR DE TEMPERATURA DE AGUA
Este sensor se encuentra instalado en el cabezote del motor se encuentra en contacto directo
con el refrigerante que circula en el cabezote del motor, es un sensor del tipo resistivo su
resistencia interna varía según cambia la temperatura del refrigerante. Este sensor trabaja en
conjunto con el módulo DEEP SEA ELECTRONIC el cual se encuentra instalado en la
parte frontal del tablero de control, indicando el valor de la temperatura del refrigerante y a
su vez se encarga de apagar o alarmar la unidad por una falla de alta temperatura sobre los
200 grados Fahrenheit.
De esta manera el motor se apaga protegiendo la integridad del personal y del equipo.
43
Gráfico No 9 Sensor de Temperatura de Agua
Fuente: Manual Murphy
Elaborado por: Jaime Teran
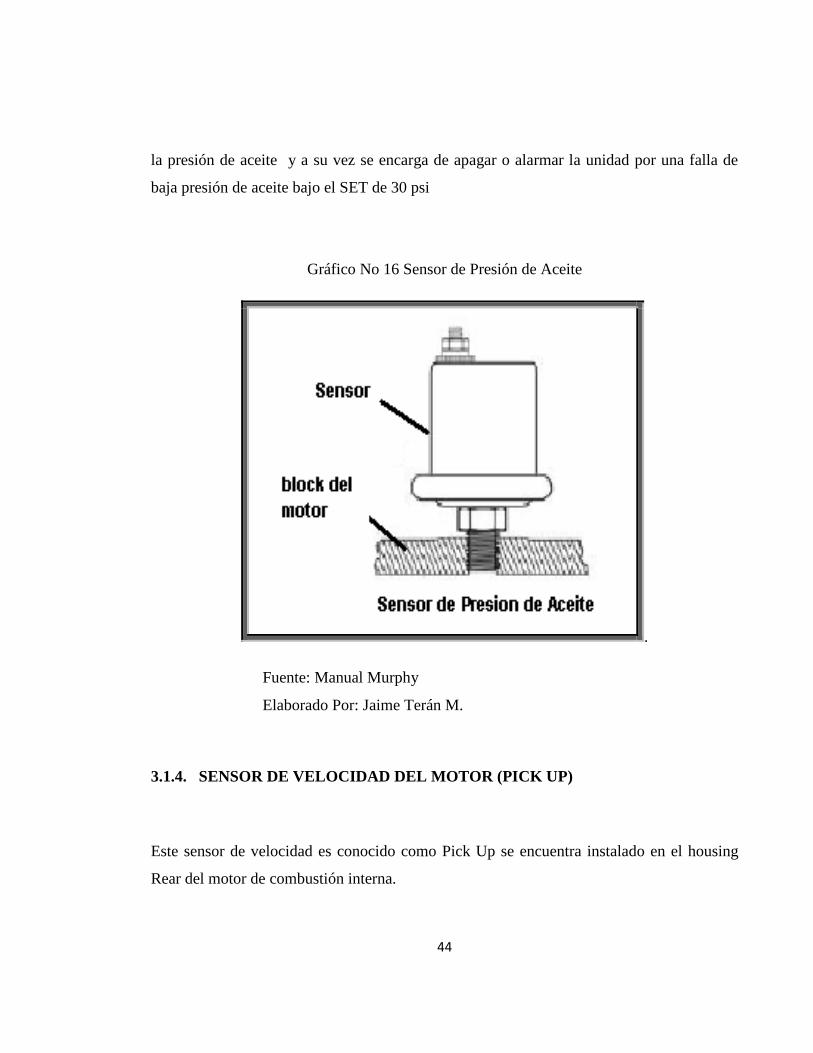
3.1.3. SENSOR DE PRESIÓN DE ACEITE
Este sensor se encuentra instalado en la parte lateral del block del motor directamente con
las tomas de presión de aceite del motor.
Este es un sensor del tipo resistivo su resistencia interna varía según cambia la presión del
aceite del motor. Este sensor trabaja en conjunto con el módulo DEEP SEA ELECTRONIC
el cual se encuentra instalado en la parte frontal del tablero de control, indicando el valor de
44
la presión de aceite y a su vez se encarga de apagar o alarmar la unidad por una falla de
baja presión de aceite bajo el SET de 30 psi
Gráfico No 16 Sensor de Presión de Aceite
.
Fuente: Manual Murphy
Elaborado Por: Jaime Terán M.
3.1.4. SENSOR DE VELOCIDAD DEL MOTOR (PICK UP)
Este sensor de velocidad es conocido como Pick Up se encuentra instalado en el housing
Rear del motor de combustión interna.
45
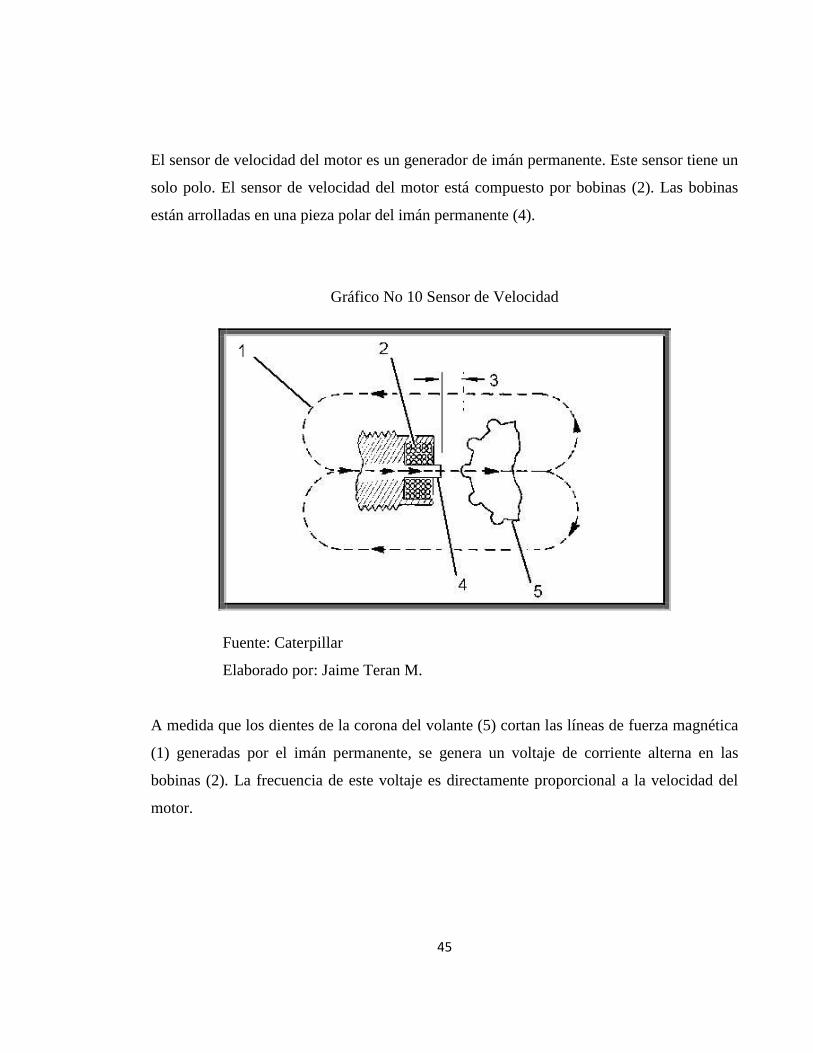
El sensor de velocidad del motor es un generador de imán permanente. Este sensor tiene un
solo polo. El sensor de velocidad del motor está compuesto por bobinas (2). Las bobinas
están arrolladas en una pieza polar del imán permanente (4).
Gráfico No 10 Sensor de Velocidad
Fuente: Caterpillar
Elaborado por: Jaime Teran M.
A medida que los dientes de la corona del volante (5) cortan las líneas de fuerza magnética
(1) generadas por el imán permanente, se genera un voltaje de corriente alterna en las
bobinas (2). La frecuencia de este voltaje es directamente proporcional a la velocidad del
motor.

46
Este sensor o Pick UP trabaja en conjunto con el módulo DEEP SEA ELECTRONIC
indicando las revoluciones (RPM) en la pantalla principal, y a su vez protegiendo el motor
de combustión interna por una sobre velocidad o OVERSPEED con de SET de 2000 RPM.
Gráfico No 11 Sensor de velocidad pick up
Fuente: Caterpillar
Elaborado por: Jaime Teran M.
47
3.1.2. SENSORES DE LA BOMBA / VESSEL.
La seguridad en la operación del equipo durante las evaluaciones de producción de pozos
petroleros es fundamental, con la instalación de sensores en la bomba de desplazamiento
positivo se protege la integridad del personal y la inversión realizada en la unidad Mobile
Test Unit.
A continuación se detalla los sensores instalados en la implementación de la
instrumentación de la unidad re construida.
3.1.2.1. Switch de alta y baja presión de succión de la bomba
Este switch está instalado en tablero de control del operador, este es indicador y a la vez
switch de alta y baja presión de succión de la bomba quintuplex, es el encargado de
registrar la presión de succión de la bomba quintuplex,.
La presión normal de operación está entre los 30 a 60 psi, el fluido que ingresa a la bomba
es agua proveniente del separador de prueba, estas presiones son críticas ya que
determinan el desempeño de la bomba para la extracción del crudo.

48
Gráfico No 12 Switch de alta y baja presión
Fuente: Murphy
Elaborado por: Jaime Teran M.
A su vez este indicador posee dos contactos eléctricos (NO) uno de alta presión y uno de
baja presión que pueden ser calibrados por el operador, estos contactos cuando se cierran
envían una señal eléctrica hacia el módulo DEEP SEA ELECTRONIC a sus entradas
digitales que se encuentra en el tablero del operador, esta señal es procesada o interpretada
por el DEEP SEA ELECTRONIC el cual cierra internamente un contacto eléctrico el cual
enviara un voltaje de 24 VDC para que la electroválvula SELENOIDE se energice y corte
el paso de combustible apagando el motor por una baja o alta presión de succión de la
bomba quintuplex, de esta manera se salvaguarda el equipo y al personal.
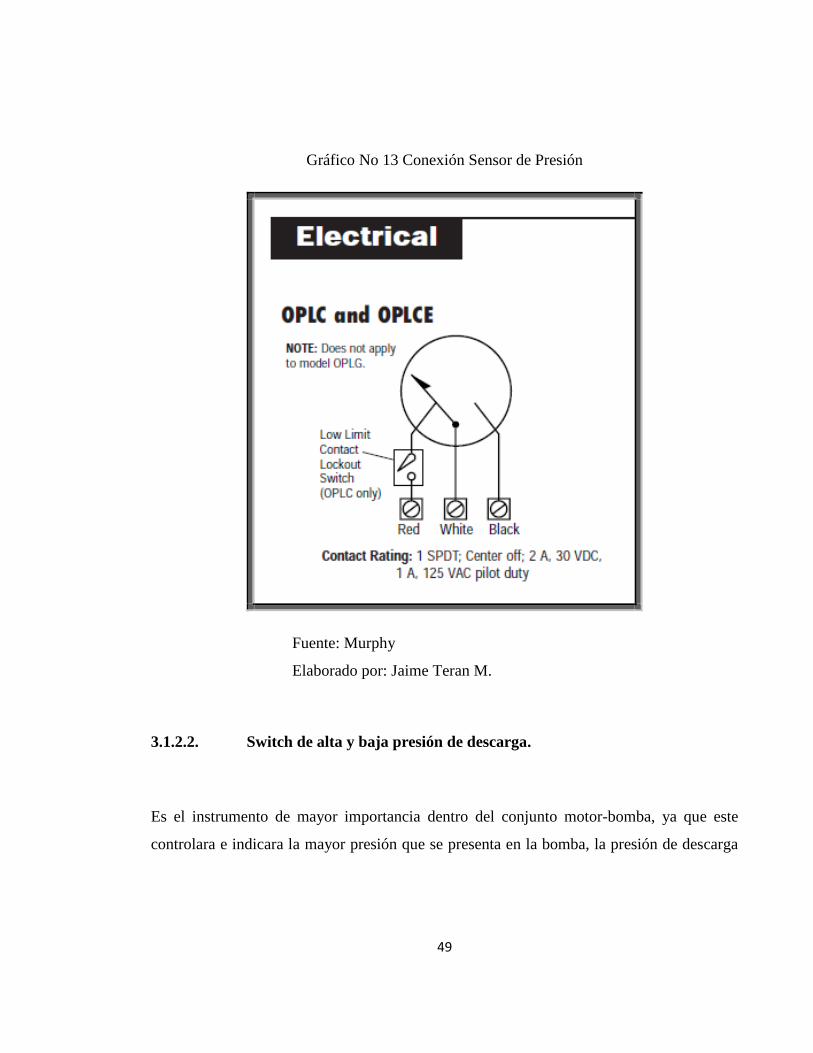
49
Gráfico No 13 Conexión Sensor de Presión
Fuente: Murphy
Elaborado por: Jaime Teran M.
3.1.2.2. Switch de alta y baja presión de descarga.
Es el instrumento de mayor importancia dentro del conjunto motor-bomba, ya que este
controlara e indicara la mayor presión que se presenta en la bomba, la presión de descarga

50
la presión de operación oscila entre los 1000 -3500 psi, vemos que es una presión
importante.
Esta es la presión de descarga que entrega la bomba quintuplex a la bomba jet en el fondo
para extraer el crudo o petróleo.
Este switch al igual que el de presión de succión que vimos anteriormente, posee dos
contactos eléctricos normalmente abiertos (NO) los cuales son calibrados por el operador
tanto para baja presión de descarga como para alta presión de descarga.
Gráfico No 14 Switch Control de presión
Fuente: Murphy.
Elaborado por: Jaime Teran M.
51
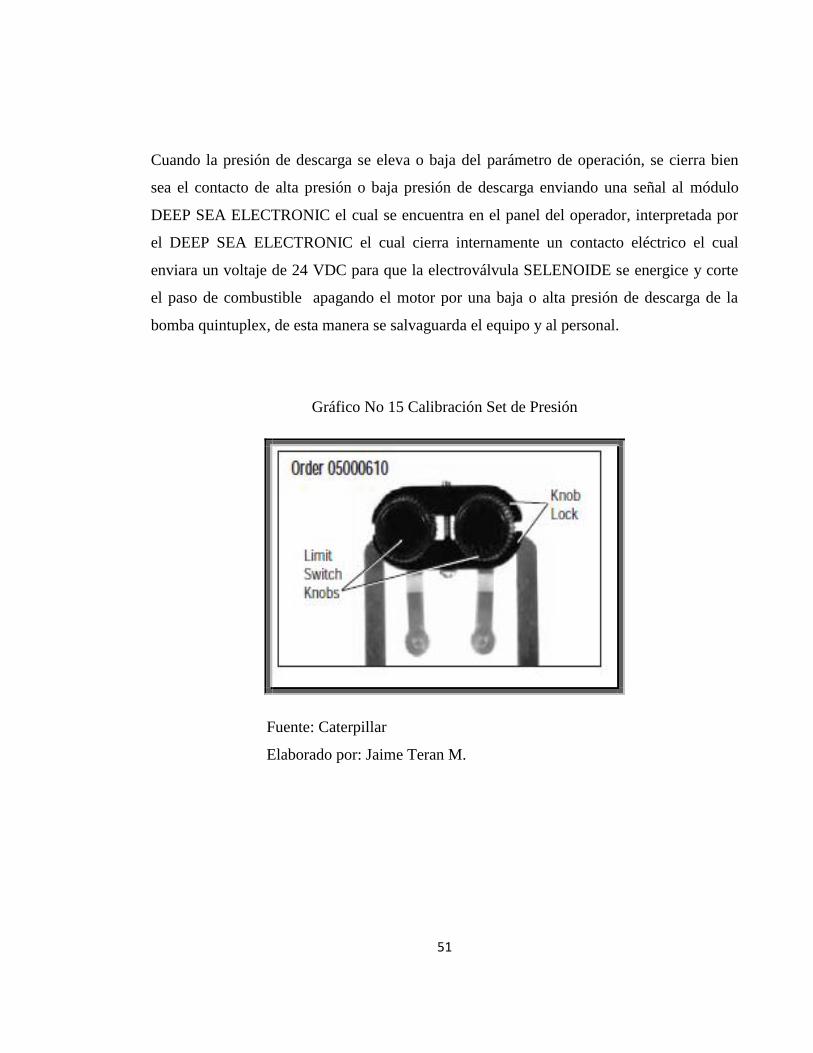
Cuando la presión de descarga se eleva o baja del parámetro de operación, se cierra bien
sea el contacto de alta presión o baja presión de descarga enviando una señal al módulo
DEEP SEA ELECTRONIC el cual se encuentra en el panel del operador, interpretada por
el DEEP SEA ELECTRONIC el cual cierra internamente un contacto eléctrico el cual
enviara un voltaje de 24 VDC para que la electroválvula SELENOIDE se energice y corte
el paso de combustible apagando el motor por una baja o alta presión de descarga de la
bomba quintuplex, de esta manera se salvaguarda el equipo y al personal.
Gráfico No 15 Calibración Set de Presión
Fuente: Caterpillar
Elaborado por: Jaime Teran M.

52
3.1.2.3. Switch de alta vibración.
Este dispositivo está ubicado tanto en el motor como en la bomba, será el encargado de
indicar que el motor o la bomba tienen alta vibración, su funcionamiento se basa en un
imán que tiene sensibilidad la cual puede se calibrada.
Gráfico No 16 Switch de alta vibración
Fuente: Murphy
Elaborado por: Jaime Teran M.
53
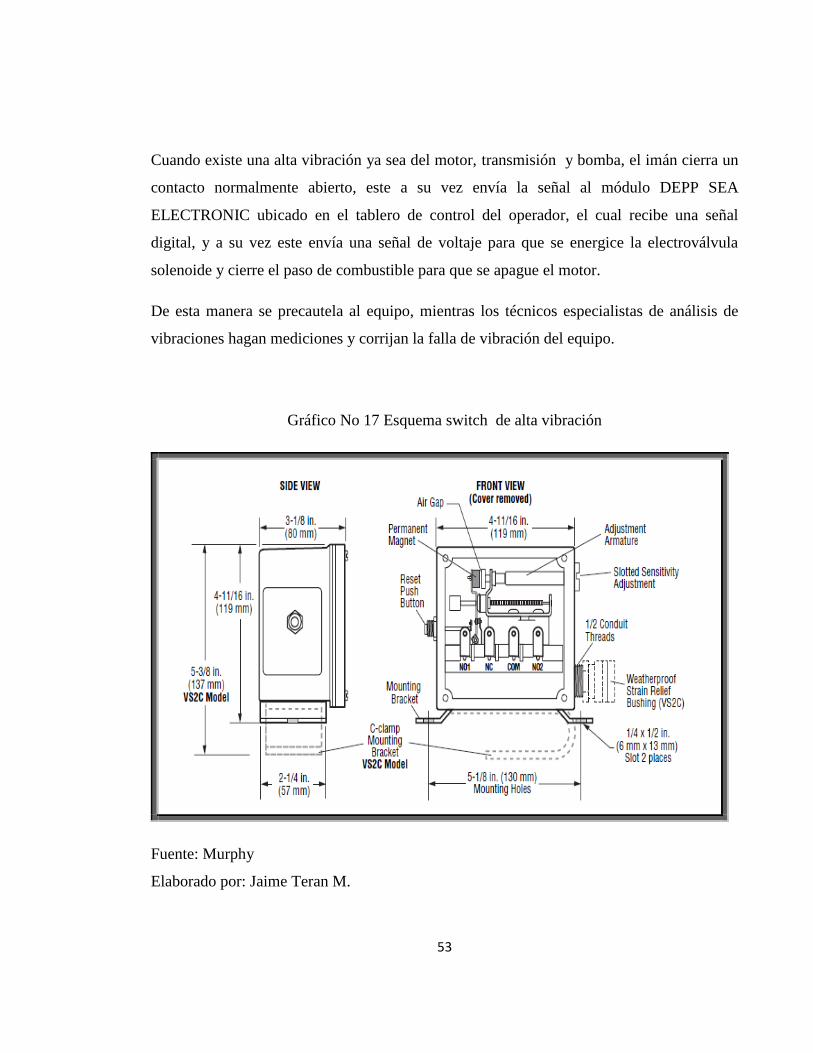
Cuando existe una alta vibración ya sea del motor, transmisión y bomba, el imán cierra un
contacto normalmente abierto, este a su vez envía la señal al módulo DEPP SEA
ELECTRONIC ubicado en el tablero de control del operador, el cual recibe una señal
digital, y a su vez este envía una señal de voltaje para que se energice la electroválvula
solenoide y cierre el paso de combustible para que se apague el motor.
De esta manera se precautela al equipo, mientras los técnicos especialistas de análisis de
vibraciones hagan mediciones y corrijan la falla de vibración del equipo.
Gráfico No 17 Esquema switch de alta vibración
Fuente: Murphy
Elaborado por: Jaime Teran M.
54
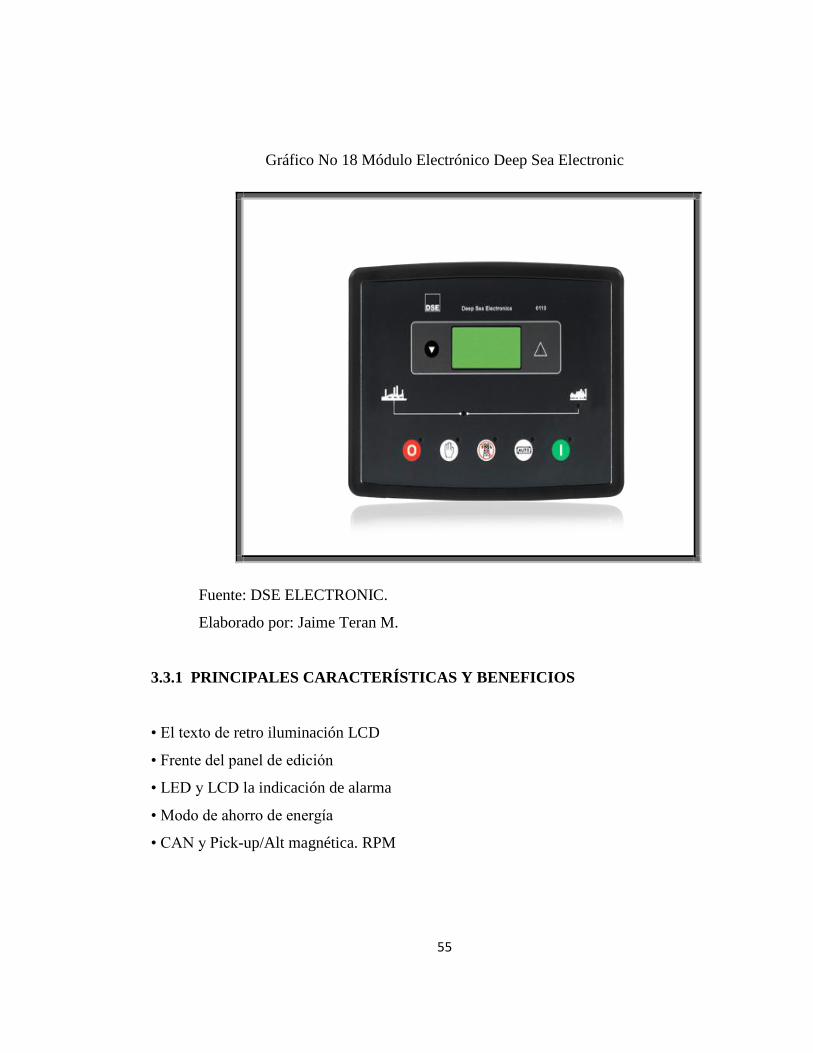
3.3. MÓDULO ELECTRÓNICO DEEP SEA ELECTRONIC / PROGRAMADOR
LÓGICO DSE/PLC.
Este modelo de módulo DSE 6110 es utilizado como el control principal en la
automatización de unidades, desde grupos electrógenos hasta grupos industriales como la
aplicación al sistema implementación de instrumentación de la unidad re construida
MOBILE TEST UNIT de la compañía Technical System Power.
Una de las principales cualidades de este módulo DSE es su versatilidad para su operación
y su fácil programación mediante su teclado manual o directamente por medio de un puerto
USB a PC.
Este modulo Deep Sea Electronic se maneja con un software propio de la misma marca que
nos permite realizar el trabajo y la programación de una forma rápida.
La implantación del sistema de instrumentación se lo realiza mediante la generación de un
diagrama eléctrico el cual nos indica las conexiones entre los sensores y el módulo DSE
además de todos los detalles de programación del módulo DSE por medio de un software
de configuración directamente desde una PC al Modulo DSE realizando el enlace de la
señal con un cable directamente desde un puerto USB de la PC.
Características únicas de DEEP SEA ELECTRONIC.
55
Gráfico No 18 Módulo Electrónico Deep Sea Electronic
Fuente: DSE ELECTRONIC.
Elaborado por: Jaime Teran M.
3.3.1 PRINCIPALES CARACTERÍSTICAS Y BENEFICIOS
• El texto de retro iluminación LCD
• Frente del panel de edición
• LED y LCD la indicación de alarma
• Modo de ahorro de energía
• CAN y Pick-up/Alt magnética. RPM
56
• PC y la configuración del panel frontal
• 6 entradas digitales (SWICHT PROTECCIONES)
• 3 entradas analógicas (SENSORES)
• 6 salidas (4 configurables en Magnetic Pick-up)
• Temporizadores configurables y las alarmas
• Alternativas de configuración
• Registro de eventos (10)
• Inicio a distancia de entrada
• 3 Fases de seguimiento del generador
• Corriente de seguimiento y protección
• Batería de control del voltaje
• Precalentamiento para el motor
• Contador de Horas
• Integral de parada o de advertencia en condición de falla
• Fácil instalación y diseño de botón
• Los parámetros del motor son controlados simultáneamente
• El módulo puede ser configurado para adaptarse a cada
aplicación
• Compatible con una amplia gama de motores de combustión interna
• Utiliza DSE configuración de software para PC
• Grado de protección IP65 (con junta opcional) ofrece una mayor
resistencia a la entrada de agua
• PC-Licencia de software libre
57
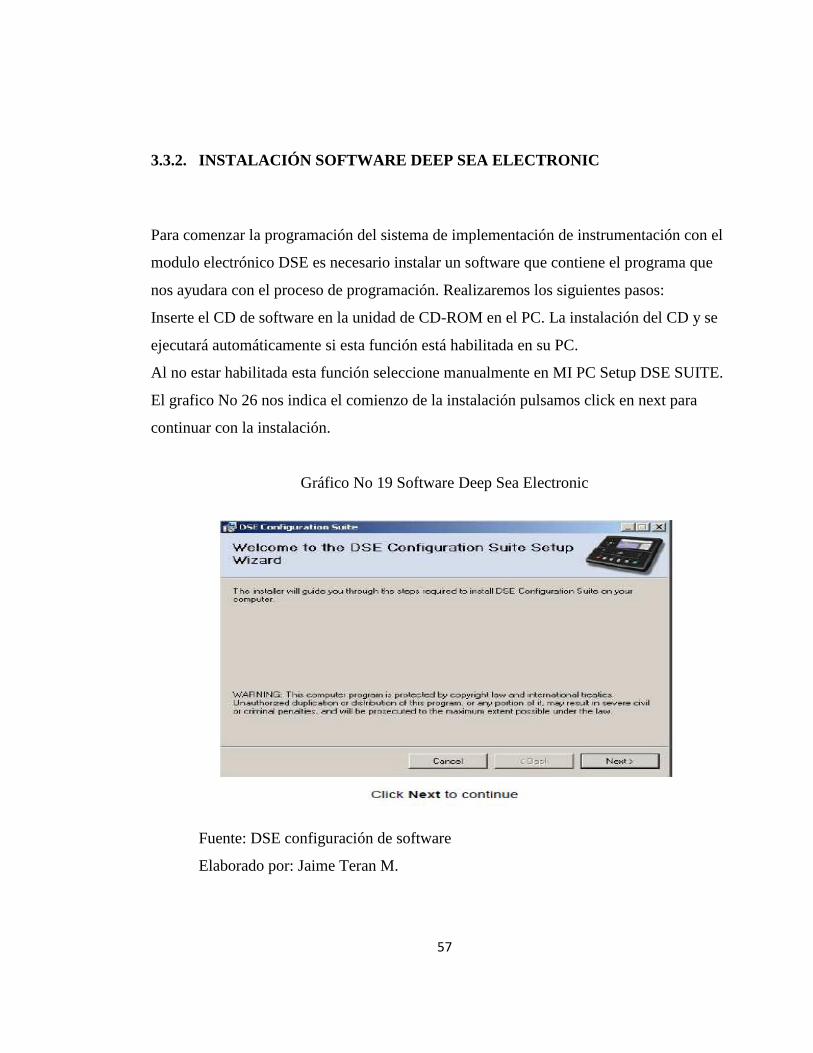
3.3.2. INSTALACIÓN SOFTWARE DEEP SEA ELECTRONIC
Para comenzar la programación del sistema de implementación de instrumentación con el
modulo electrónico DSE es necesario instalar un software que contiene el programa que
nos ayudara con el proceso de programación. Realizaremos los siguientes pasos:
Inserte el CD de software en la unidad de CD-ROM en el PC. La instalación del CD y se
ejecutará automáticamente si esta función está habilitada en su PC.
Al no estar habilitada esta función seleccione manualmente en MI PC Setup DSE SUITE.
El grafico No 26 nos indica el comienzo de la instalación pulsamos click en next para
continuar con la instalación.
Gráfico No 19 Software Deep Sea Electronic
Fuente: DSE configuración de software
Elaborado por: Jaime Teran M.
58
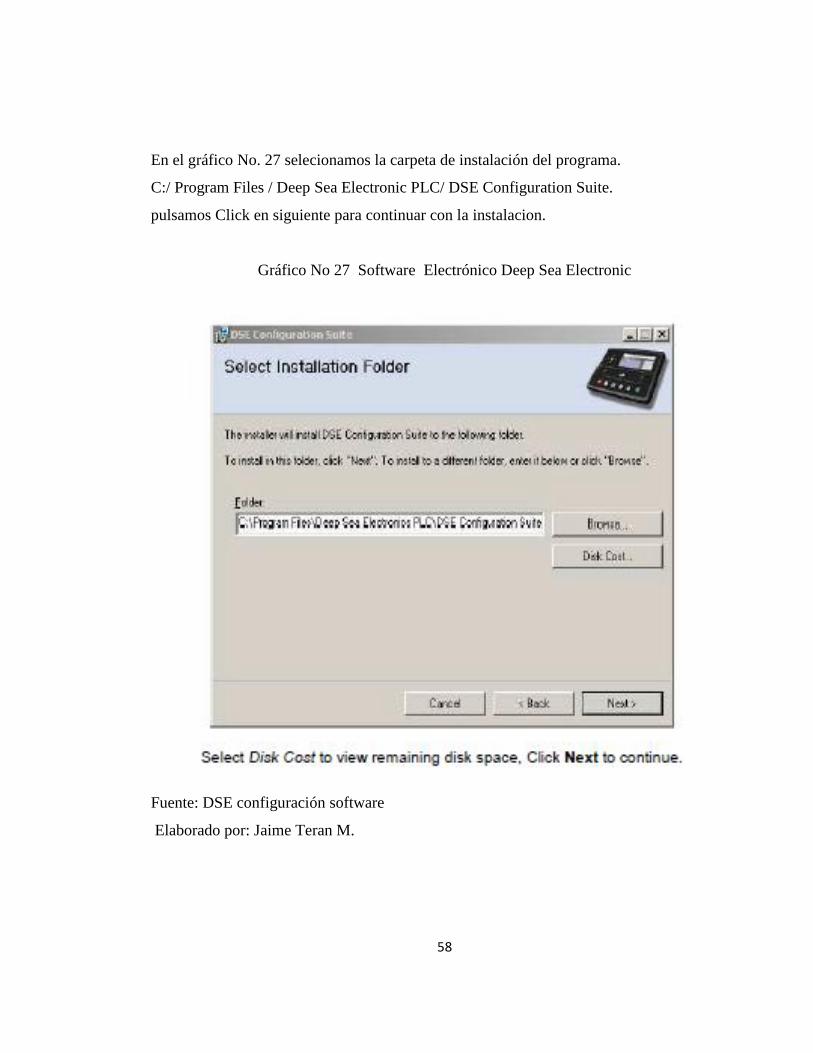
En el gráfico No. 27 selecionamos la carpeta de instalación del programa.
C:/ Program Files / Deep Sea Electronic PLC/ DSE Configuration Suite.
pulsamos Click en siguiente para continuar con la instalacion.
Gráfico No 27 Software Electrónico Deep Sea Electronic
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
59
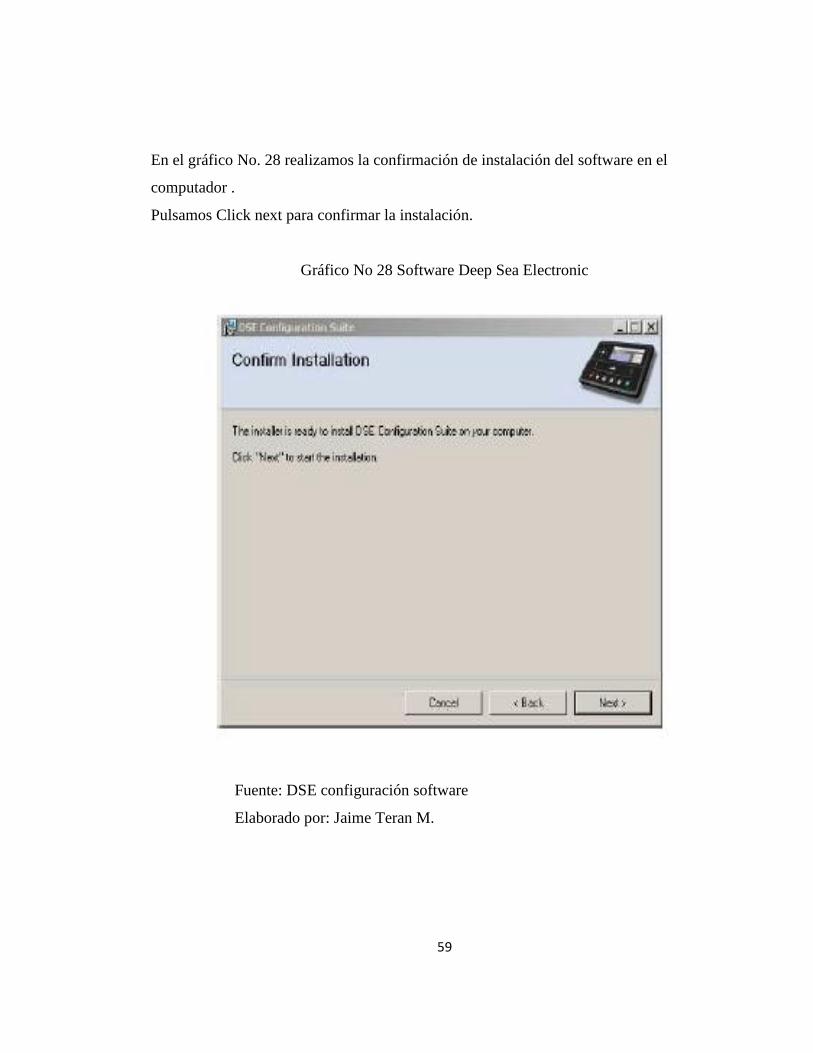
En el gráfico No. 28 realizamos la confirmación de instalación del software en el
computador .
Pulsamos Click next para confirmar la instalación.
Gráfico No 28 Software Deep Sea Electronic
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
60
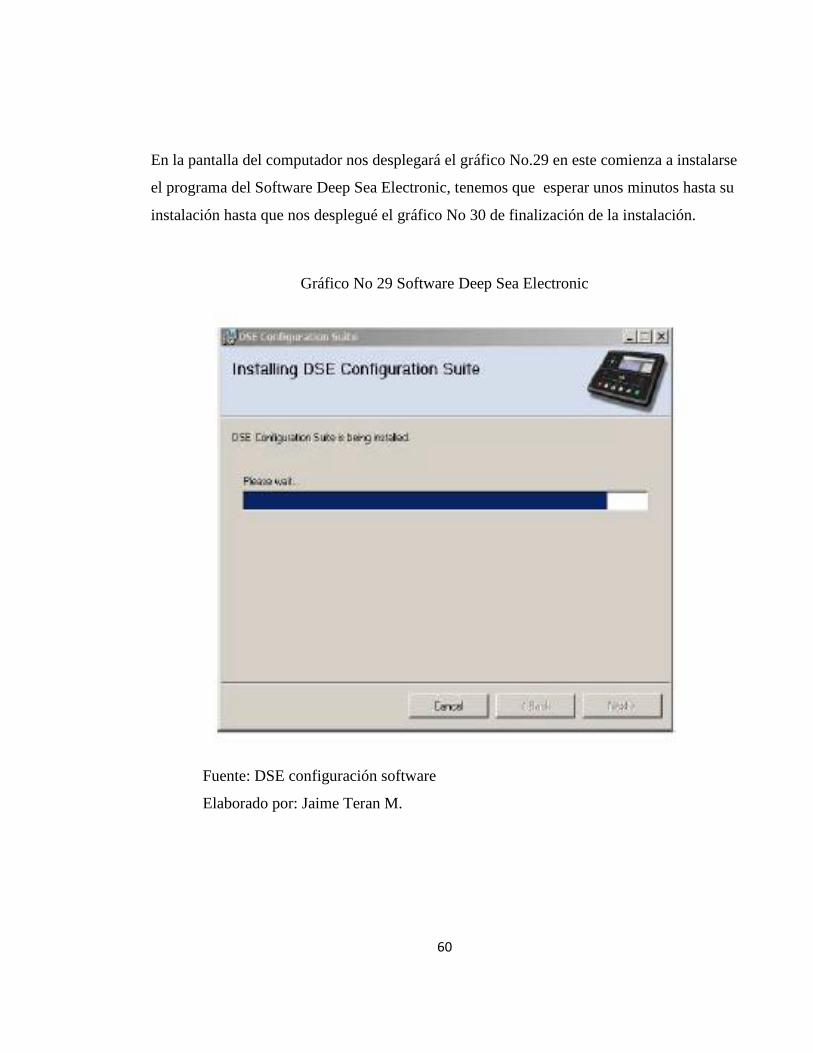
En la pantalla del computador nos desplegará el gráfico No.29 en este comienza a instalarse
el programa del Software Deep Sea Electronic, tenemos que esperar unos minutos hasta su
instalación hasta que nos desplegué el gráfico No 30 de finalización de la instalación.
Gráfico No 29 Software Deep Sea Electronic
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
61
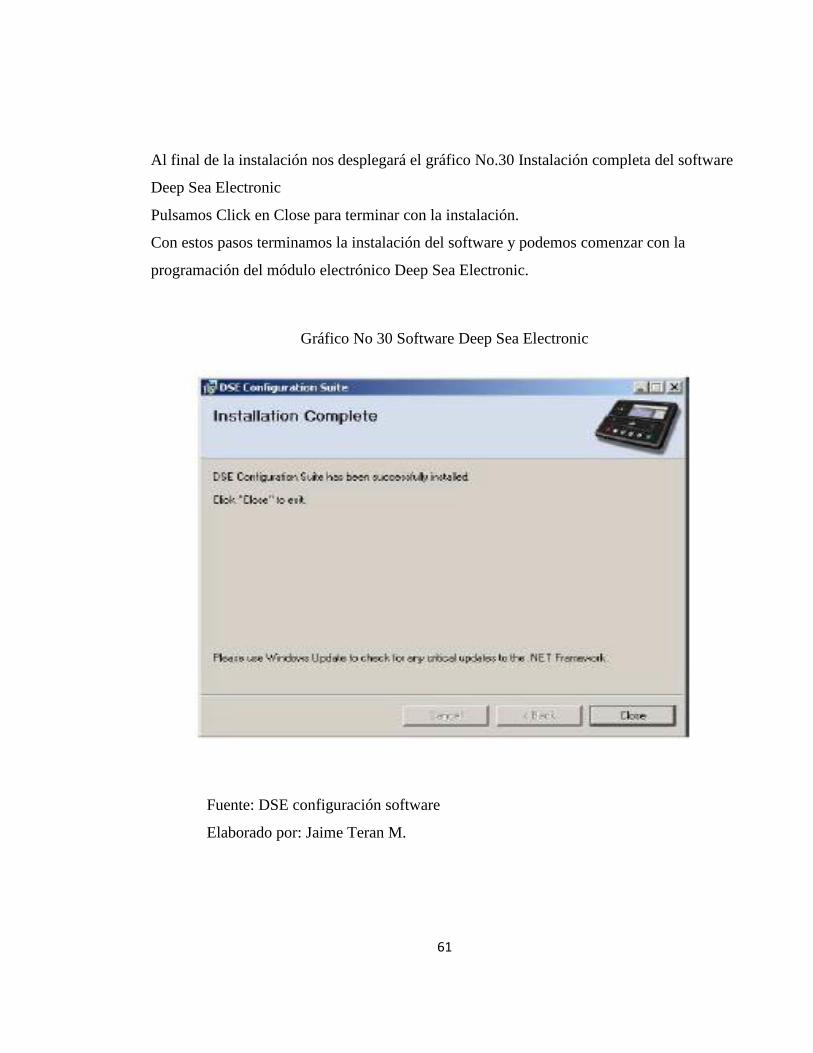
Al final de la instalación nos desplegará el gráfico No.30 Instalación completa del software
Deep Sea Electronic
Pulsamos Click en Close para terminar con la instalación.
Con estos pasos terminamos la instalación del software y podemos comenzar con la
programación del módulo electrónico Deep Sea Electronic.
Gráfico No 30 Software Deep Sea Electronic
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
62
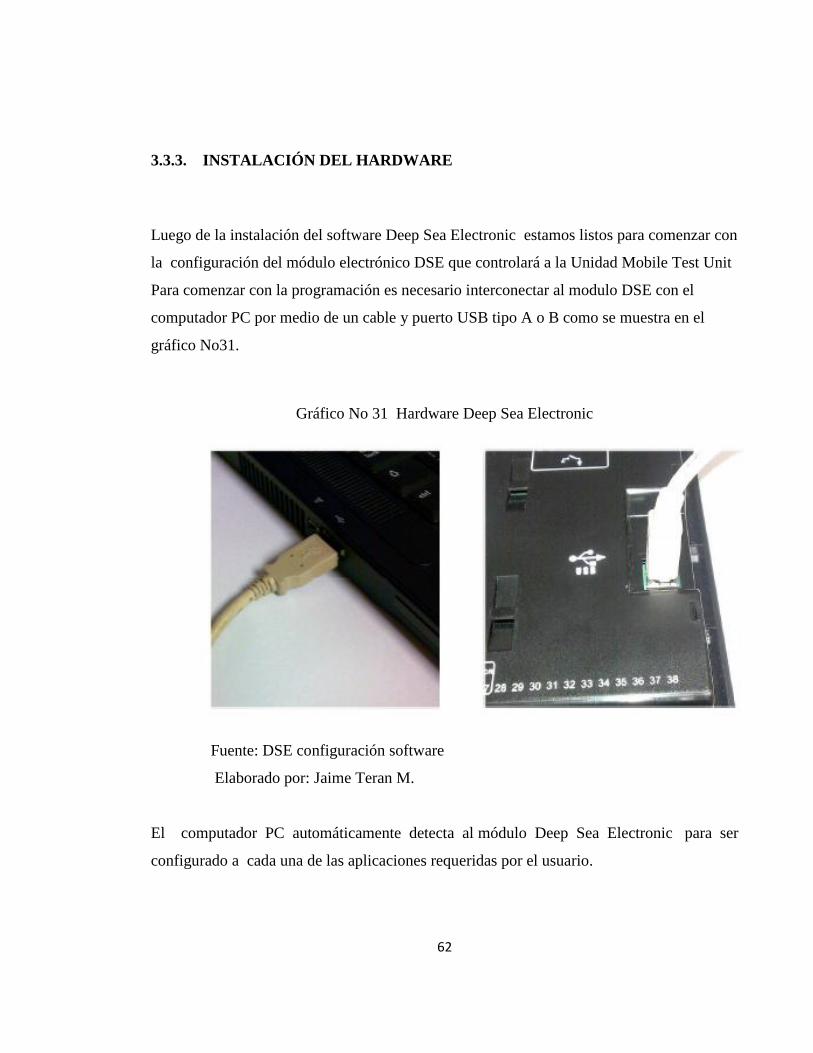
3.3.3. INSTALACIÓN DEL HARDWARE
Luego de la instalación del software Deep Sea Electronic estamos listos para comenzar con
la configuración del módulo electrónico DSE que controlará a la Unidad Mobile Test Unit
Para comenzar con la programación es necesario interconectar al modulo DSE con el
computador PC por medio de un cable y puerto USB tipo A o B como se muestra en el
gráfico No31.
Gráfico No 31 Hardware Deep Sea Electronic
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
El computador PC automáticamente detecta al módulo Deep Sea Electronic para ser
configurado a cada una de las aplicaciones requeridas por el usuario.
63
3.3.4. CONFIGURACIÓN DEL MÓDULO DEEP SEA ELECTRONIC EN LA
UNIDAD MOBILE TEST UNIT.
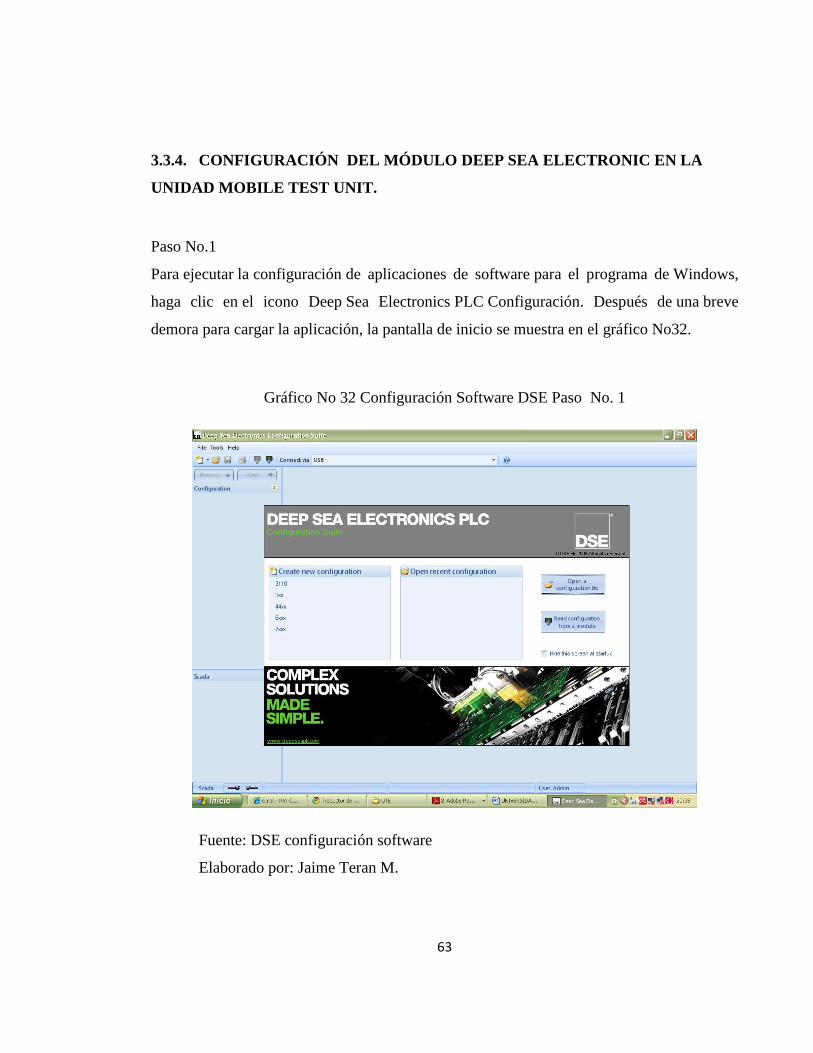
Paso No.1
Para ejecutar la configuración de aplicaciones de software para el programa de Windows,
haga clic en el icono Deep Sea Electronics PLC Configuración. Después de una breve
demora para cargar la aplicación, la pantalla de inicio se muestra en el gráfico No32.
Gráfico No 32 Configuración Software DSE Paso No. 1
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
64
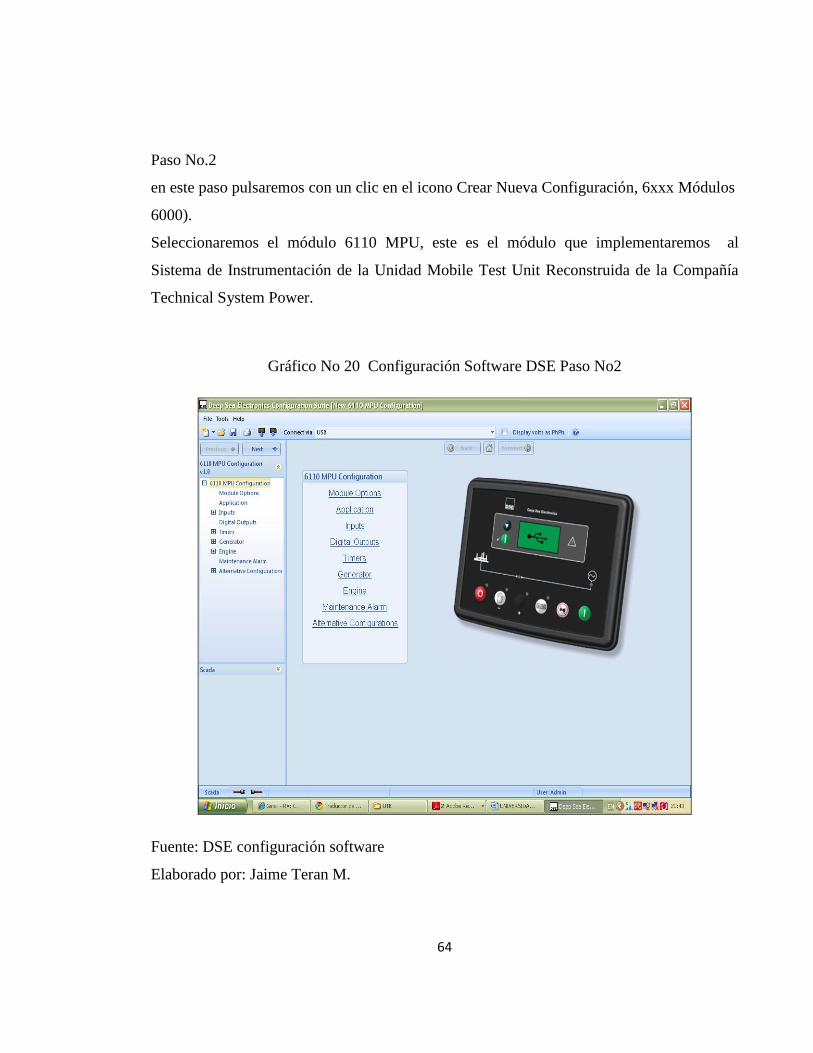
Paso No.2
en este paso pulsaremos con un clic en el icono Crear Nueva Configuración, 6xxx Módulos
6000).
Seleccionaremos el módulo 6110 MPU, este es el módulo que implementaremos al
Sistema de Instrumentación de la Unidad Mobile Test Unit Reconstruida de la Compañía
Technical System Power.
Gráfico No 20 Configuración Software DSE Paso No2
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
65
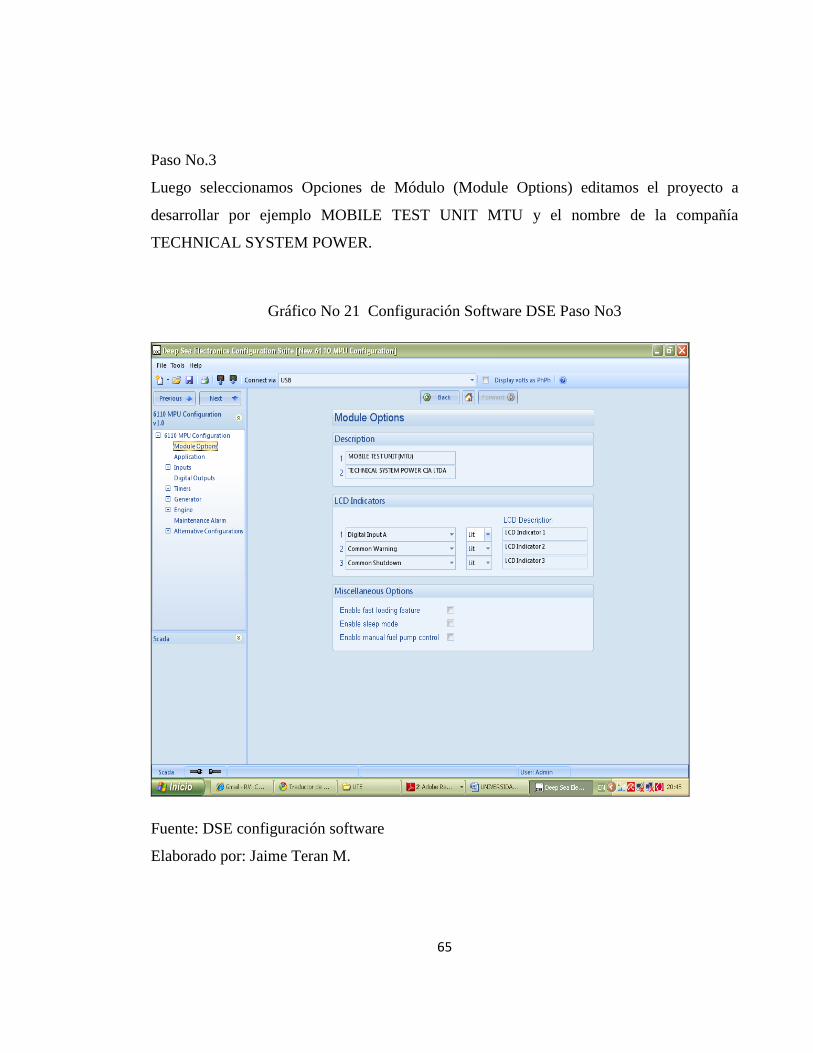
Paso No.3
Luego seleccionamos Opciones de Módulo (Module Options) editamos el proyecto a
desarrollar por ejemplo MOBILE TEST UNIT MTU y el nombre de la compañía
TECHNICAL SYSTEM POWER.
Gráfico No 21 Configuración Software DSE Paso No3
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.

66
Paso No.4
En este paso seleccionaremos el tipo de motor de combustión interna con el que trabaja la
Unidad Mobile Test Unit.
En esta aplicación seleccionamos Conventional Engine.
Gráfico No 22 Configuración Software DSE Paso No 4
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
67
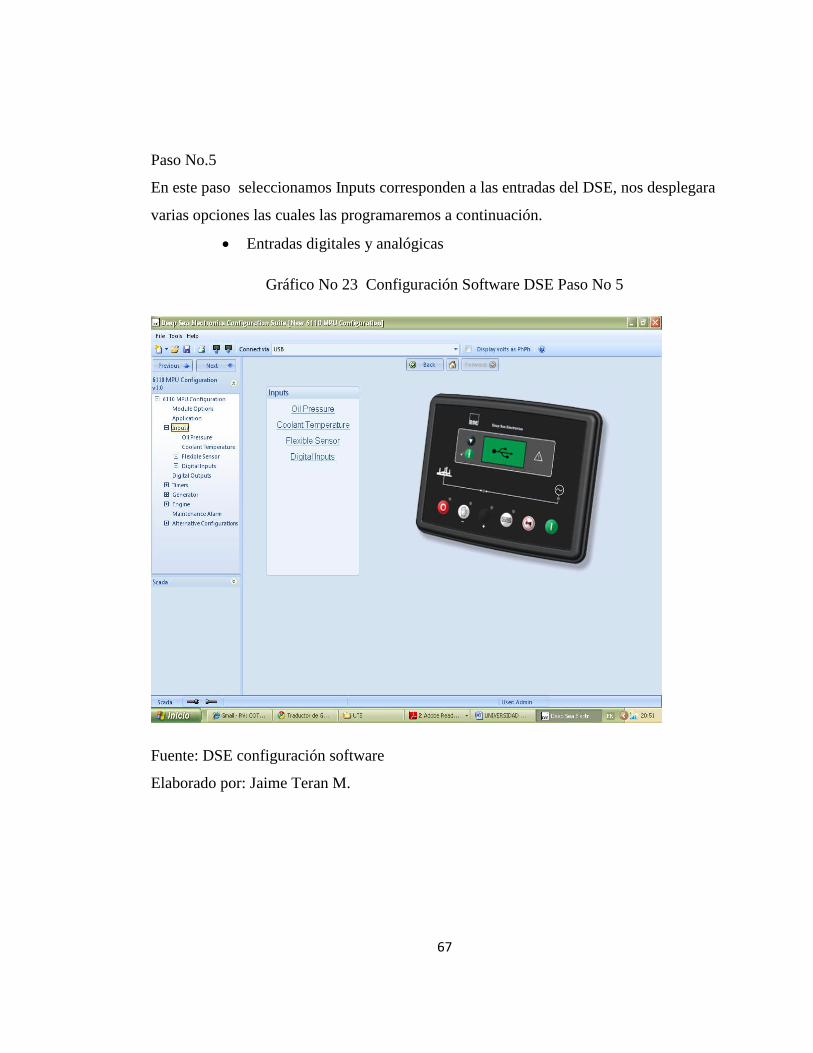
Paso No.5
En este paso seleccionamos Inputs corresponden a las entradas del DSE, nos desplegara
varias opciones las cuales las programaremos a continuación.
Entradas digitales y analógicas
Gráfico No 23 Configuración Software DSE Paso No 5
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
68
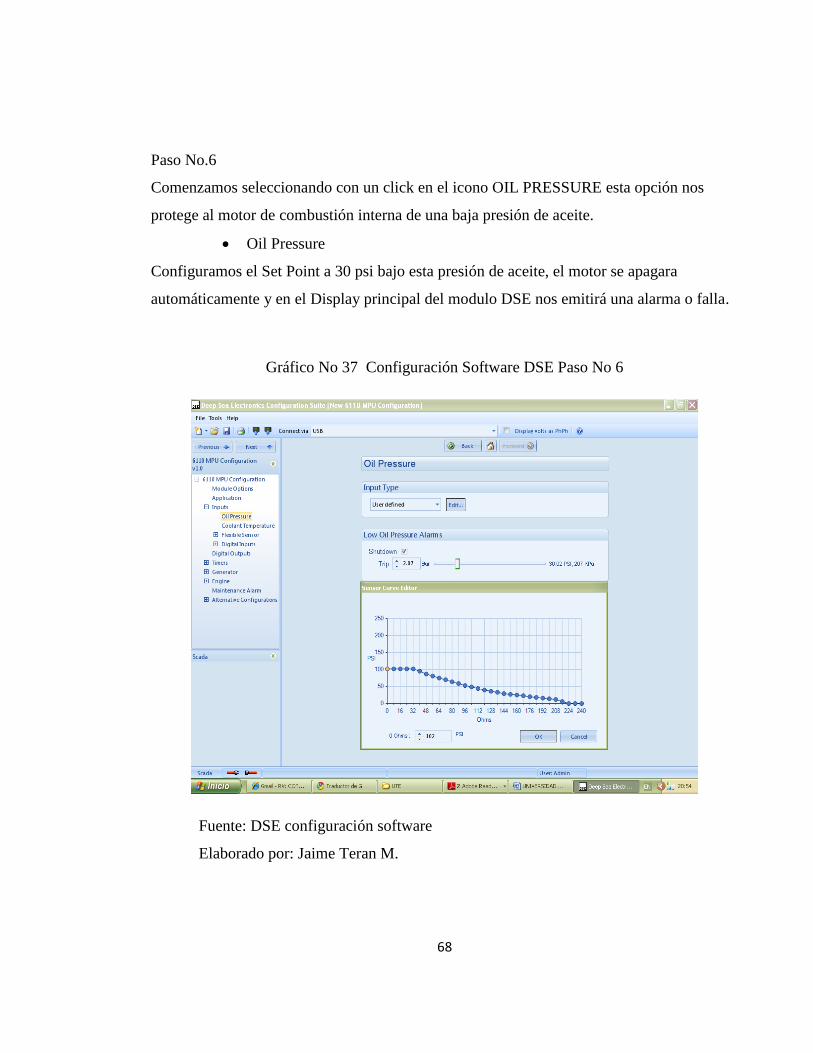
Paso No.6
Comenzamos seleccionando con un click en el icono OIL PRESSURE esta opción nos
protege al motor de combustión interna de una baja presión de aceite.
Oil Pressure
Configuramos el Set Point a 30 psi bajo esta presión de aceite, el motor se apagara
automáticamente y en el Display principal del modulo DSE nos emitirá una alarma o falla.
Gráfico No 37 Configuración Software DSE Paso No 6
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
69
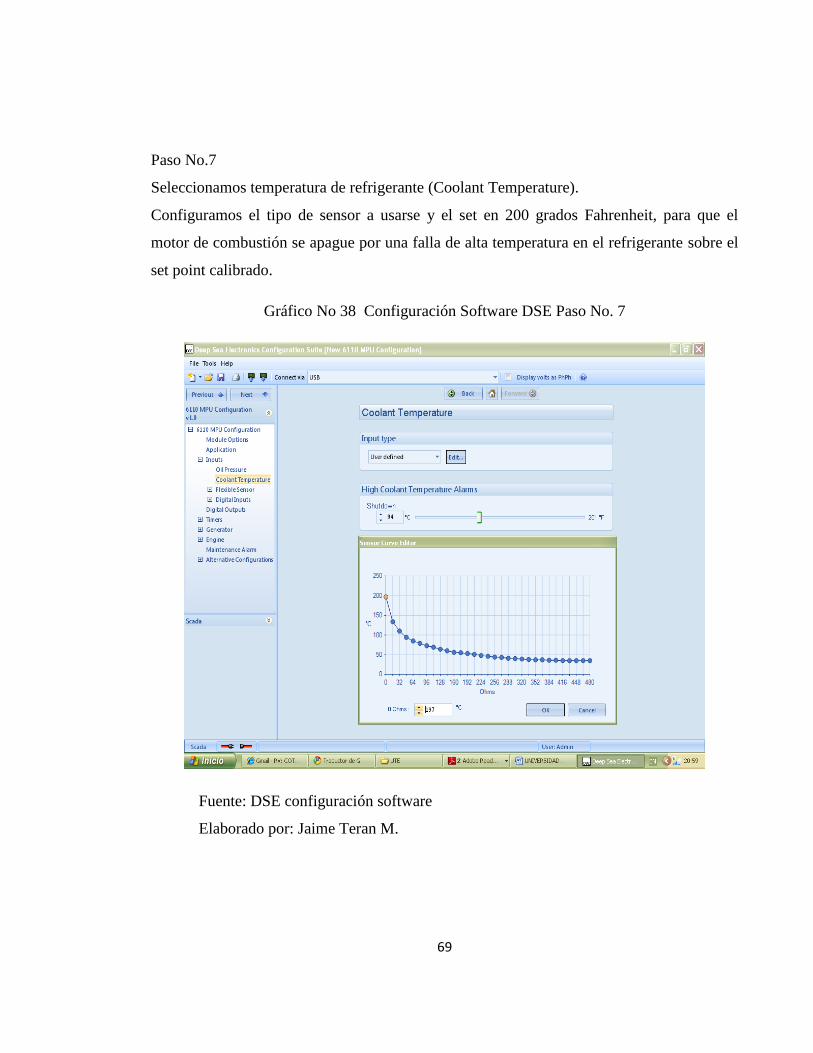
Paso No.7
Seleccionamos temperatura de refrigerante (Coolant Temperature).
Configuramos el tipo de sensor a usarse y el set en 200 grados Fahrenheit, para que el
motor de combustión se apague por una falla de alta temperatura en el refrigerante sobre el
set point calibrado.
Gráfico No 38 Configuración Software DSE Paso No. 7
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
70
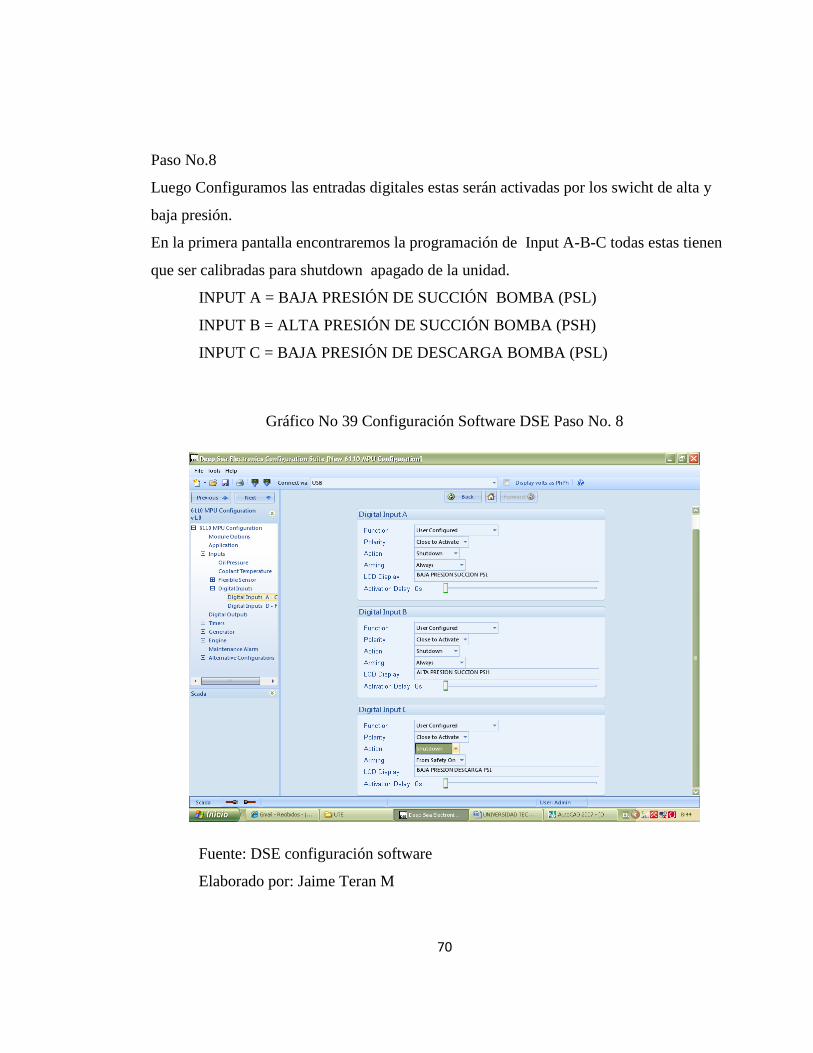
Paso No.8
Luego Configuramos las entradas digitales estas serán activadas por los swicht de alta y
baja presión.
En la primera pantalla encontraremos la programación de Input A-B-C todas estas tienen
que ser calibradas para shutdown apagado de la unidad.
INPUT A = BAJA PRESIÓN DE SUCCIÓN BOMBA (PSL)
INPUT B = ALTA PRESIÓN DE SUCCIÓN BOMBA (PSH)
INPUT C = BAJA PRESIÓN DE DESCARGA BOMBA (PSL)
Gráfico No 39 Configuración Software DSE Paso No. 8
Fuente: DSE configuración software
Elaborado por: Jaime Teran M
71
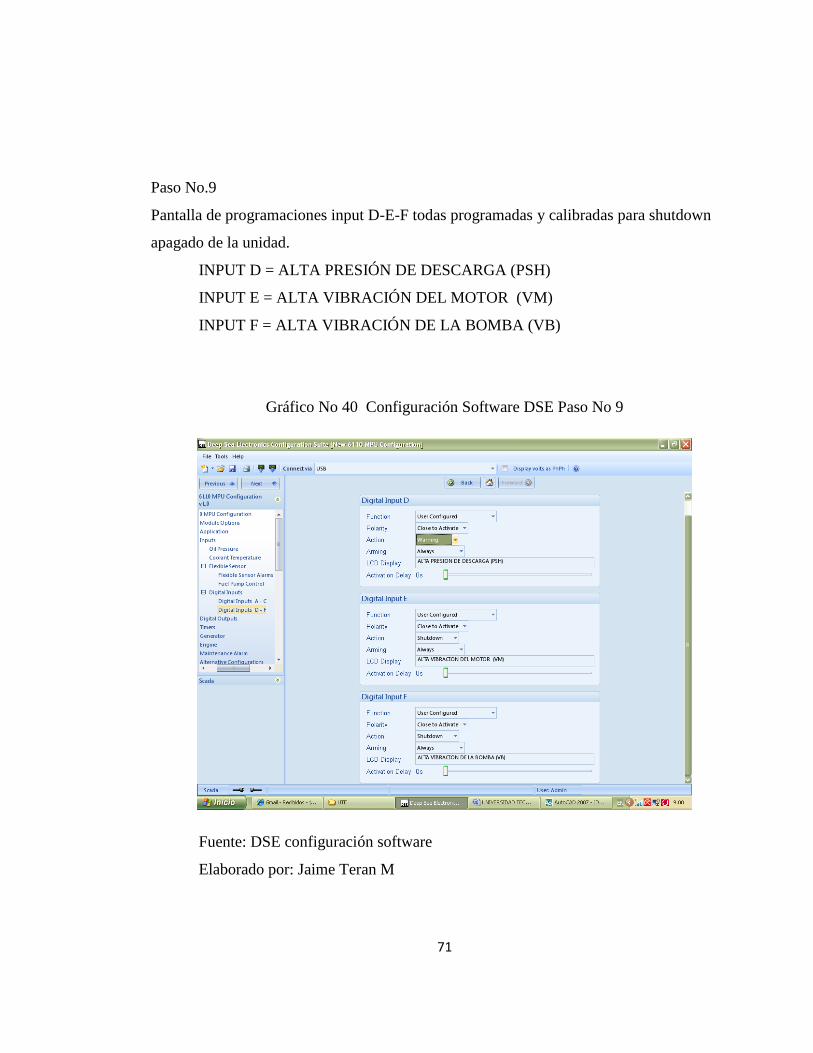
Paso No.9
Pantalla de programaciones input D-E-F todas programadas y calibradas para shutdown
apagado de la unidad.
INPUT D = ALTA PRESIÓN DE DESCARGA (PSH)
INPUT E = ALTA VIBRACIÓN DEL MOTOR (VM)
INPUT F = ALTA VIBRACIÓN DE LA BOMBA (VB)
Gráfico No 40 Configuración Software DSE Paso No 9
Fuente: DSE configuración software
Elaborado por: Jaime Teran M
72
Paso No.10
En la pantalla de configuración de digital outputs (Salidas Digitales) encontraremos las
salidas A y B configuradas por fábrica corresponden:
OUTPUT A = FUEL RELAY
Esta será la señal de salida la cual nos activara el Solenoide que contrala la cremallera del
gobernor cortando el paso de combustible del motor, por cualquier alarma que genere la
operación de la unidad Mobile Test Unit (Apagado del motor).
OUTPUT B = START RELAY esta señal es la encargada de encender el motor enviando
una señal al motor de arranque del motor Caterpillar 3406 de la unidad Mobile Test Unit.
OUTPUT C = esta salida es opcional la configuración, en este caso la seleccionaremos para
una alarma audible como señal de aviso cuando la unidad Mobile Test Unit se apague por
cualquier falla ocurrida.
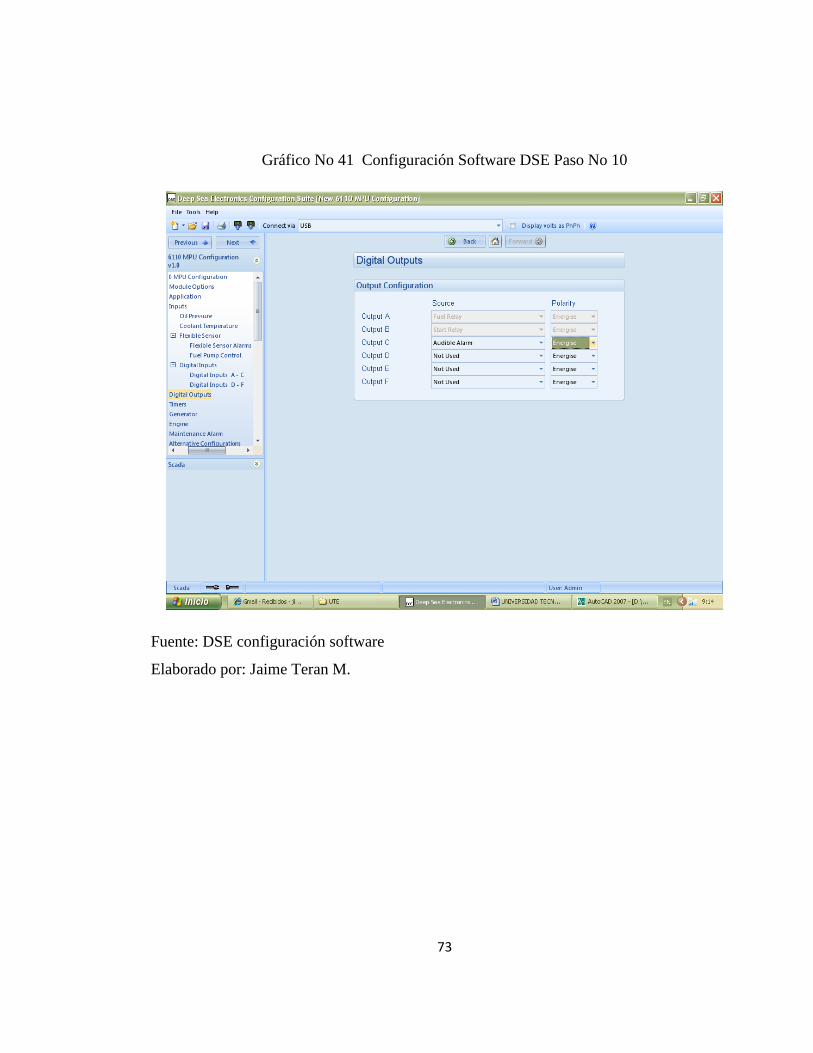
73
Gráfico No 41 Configuración Software DSE Paso No 10
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.

74
Paso No.11
En esta aplicación no será seleccionada la opción GENERATOR OPTIONS, ya que este
módulo Deep Sea Electronic estamos implementando a una unidad de bombeo Hidráulico
para pruebas de pozos petroleros por lo cual desactivaremos con un click en el casillero
alternador fitted.
Gráfico No 24 Configuración Software DSE Paso No 11
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
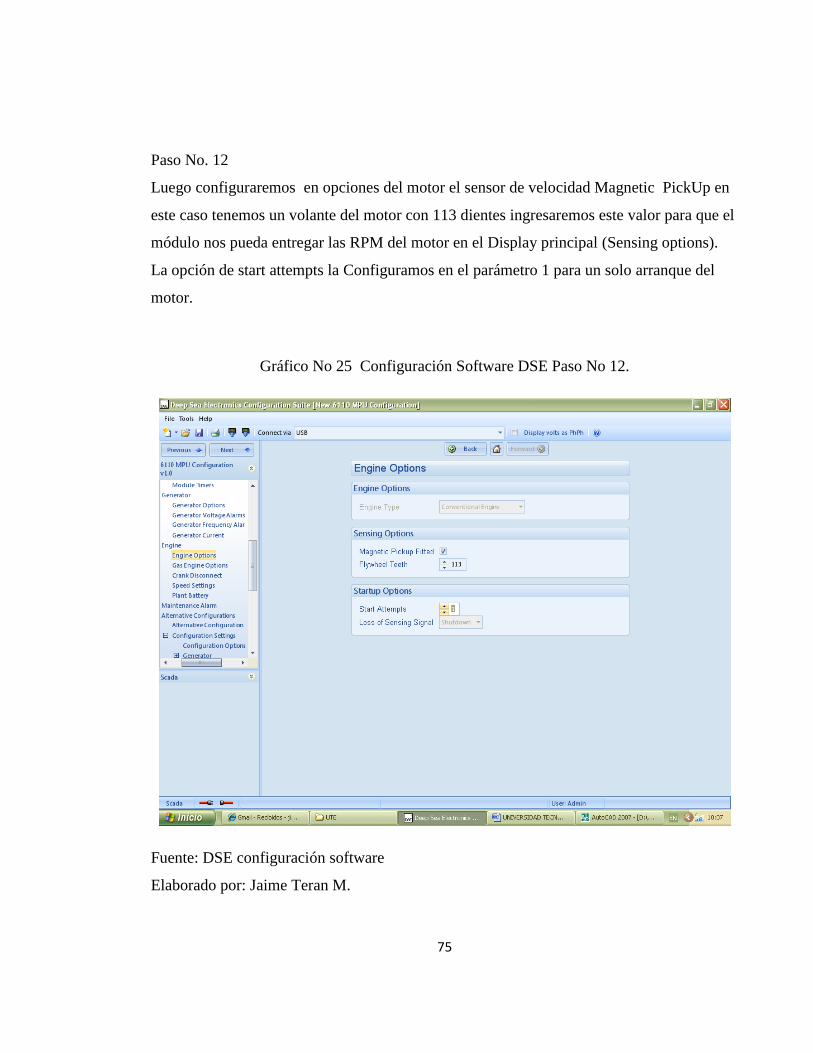
75
Paso No. 12
Luego configuraremos en opciones del motor el sensor de velocidad Magnetic PickUp en
este caso tenemos un volante del motor con 113 dientes ingresaremos este valor para que el
módulo nos pueda entregar las RPM del motor en el Display principal (Sensing options).
La opción de start attempts la Configuramos en el parámetro 1 para un solo arranque del
motor.
Gráfico No 25 Configuración Software DSE Paso No 12.
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
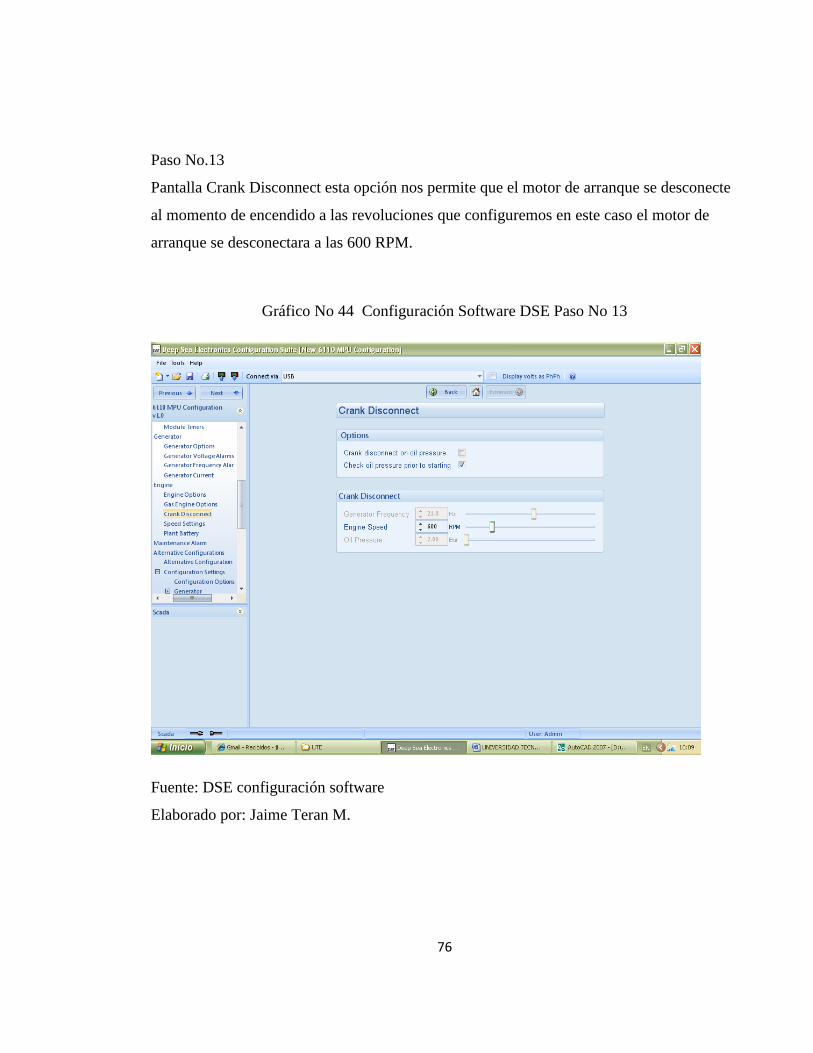
76
Paso No.13
Pantalla Crank Disconnect esta opción nos permite que el motor de arranque se desconecte
al momento de encendido a las revoluciones que configuremos en este caso el motor de
arranque se desconectara a las 600 RPM.
Gráfico No 44 Configuración Software DSE Paso No 13
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
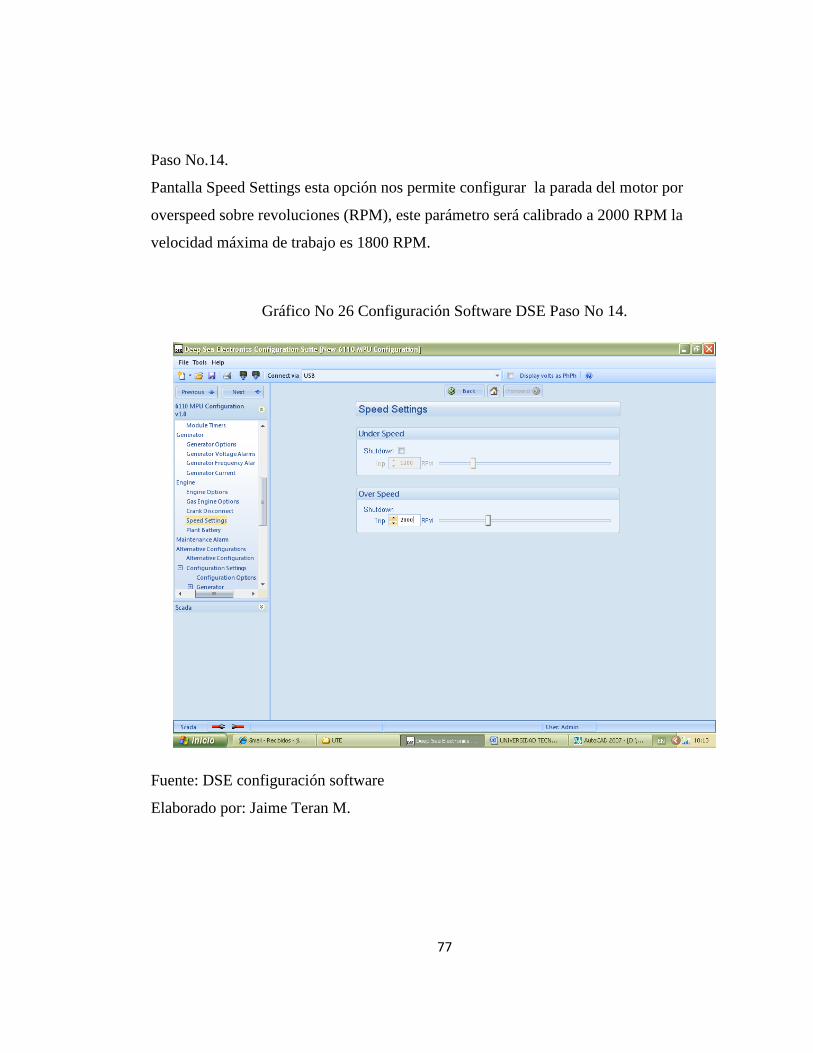
77
Paso No.14.
Pantalla Speed Settings esta opción nos permite configurar la parada del motor por
overspeed sobre revoluciones (RPM), este parámetro será calibrado a 2000 RPM la
velocidad máxima de trabajo es 1800 RPM.
Gráfico No 26 Configuración Software DSE Paso No 14.
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
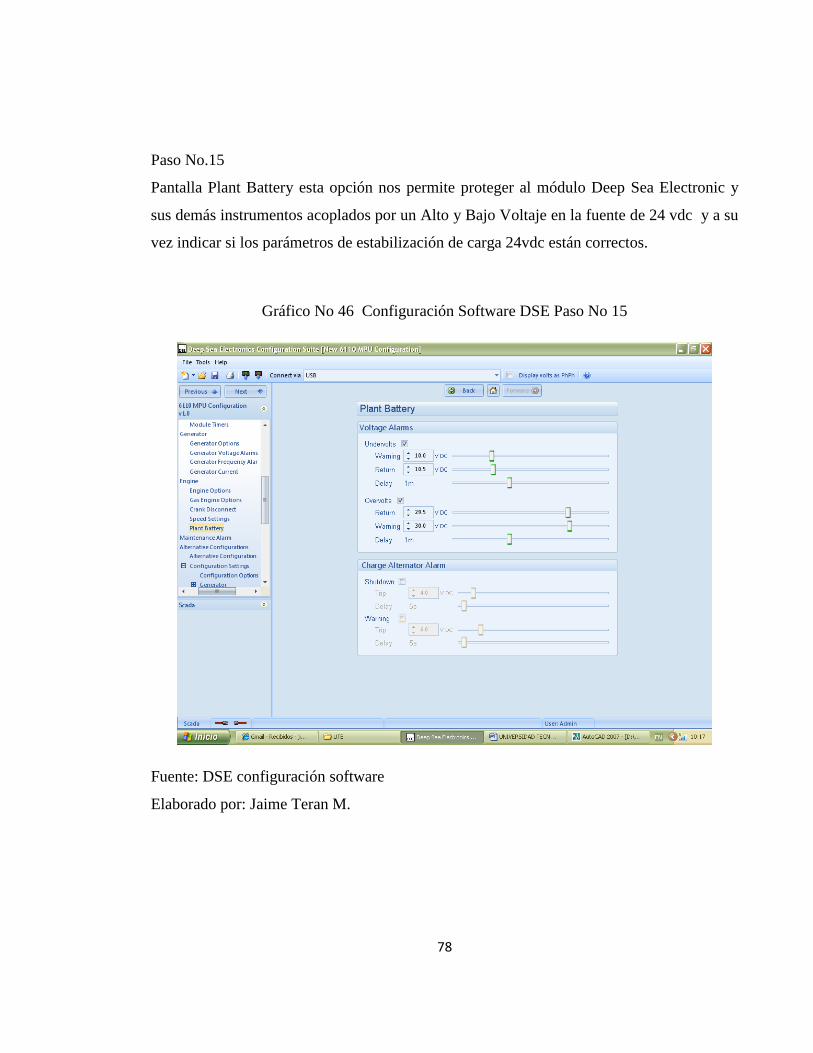
78
Paso No.15
Pantalla Plant Battery esta opción nos permite proteger al módulo Deep Sea Electronic y
sus demás instrumentos acoplados por un Alto y Bajo Voltaje en la fuente de 24 vdc y a su
vez indicar si los parámetros de estabilización de carga 24vdc están correctos.
Gráfico No 46 Configuración Software DSE Paso No 15
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.

79
Paso No.16.
Pantalla Maintenance Alarm esta opción nos ayuda a estar pendiente en el próximo
mantenimiento del motor depende el tipo de motor de combustión para realizar su
mantenimiento a las horas programadas en este tipo de motor Caterpillar 3406 corresponde
a las 250 horas. en el Display principal del módulo DSE nos desplegara una alarma de
aviso.
Gráfico No 47 Configuración Software DSE Paso No 16
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
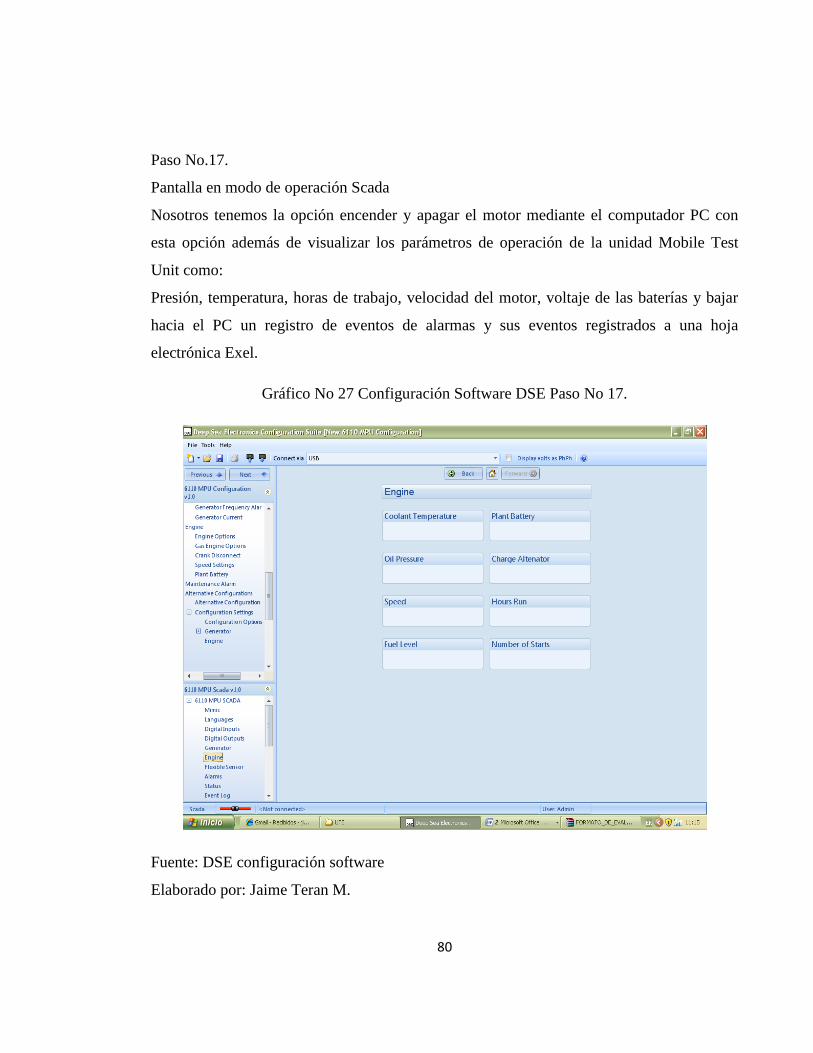
80
Paso No.17.
Pantalla en modo de operación Scada
Nosotros tenemos la opción encender y apagar el motor mediante el computador PC con
esta opción además de visualizar los parámetros de operación de la unidad Mobile Test
Unit como:
Presión, temperatura, horas de trabajo, velocidad del motor, voltaje de las baterías y bajar
hacia el PC un registro de eventos de alarmas y sus eventos registrados a una hoja
electrónica Exel.
Gráfico No 27 Configuración Software DSE Paso No 17.
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
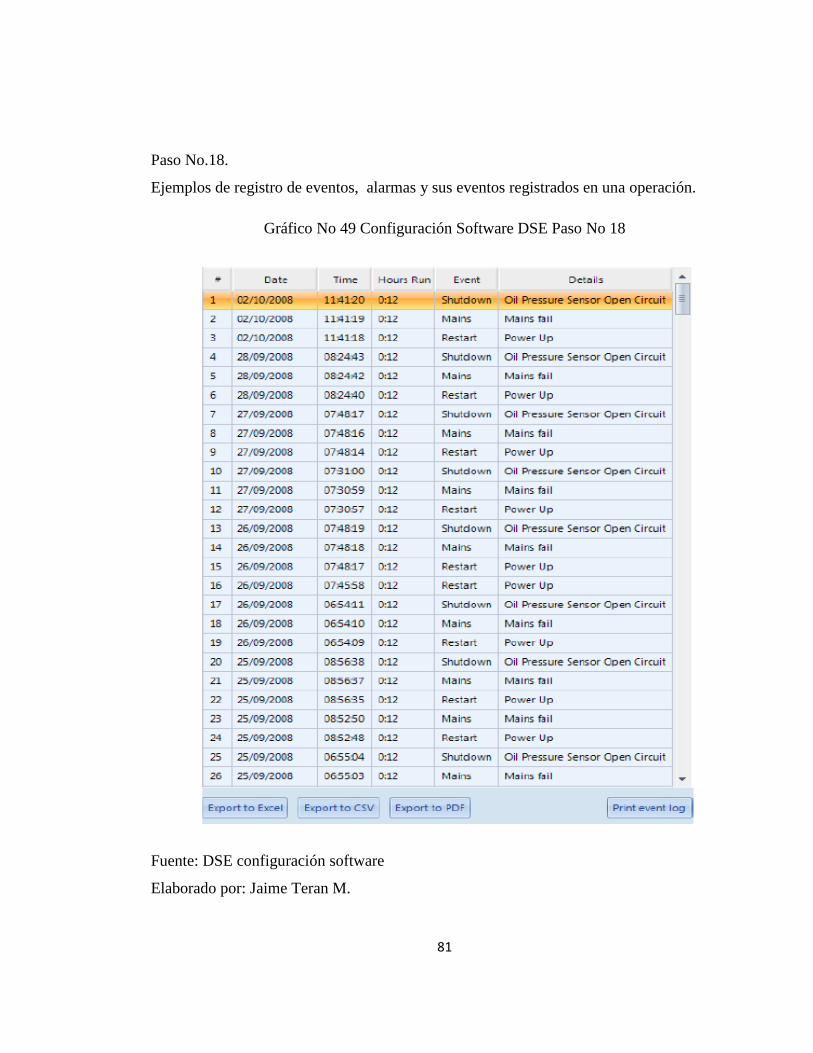
81
Paso No.18.
Ejemplos de registro de eventos, alarmas y sus eventos registrados en una operación.
Gráfico No 49 Configuración Software DSE Paso No 18
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.
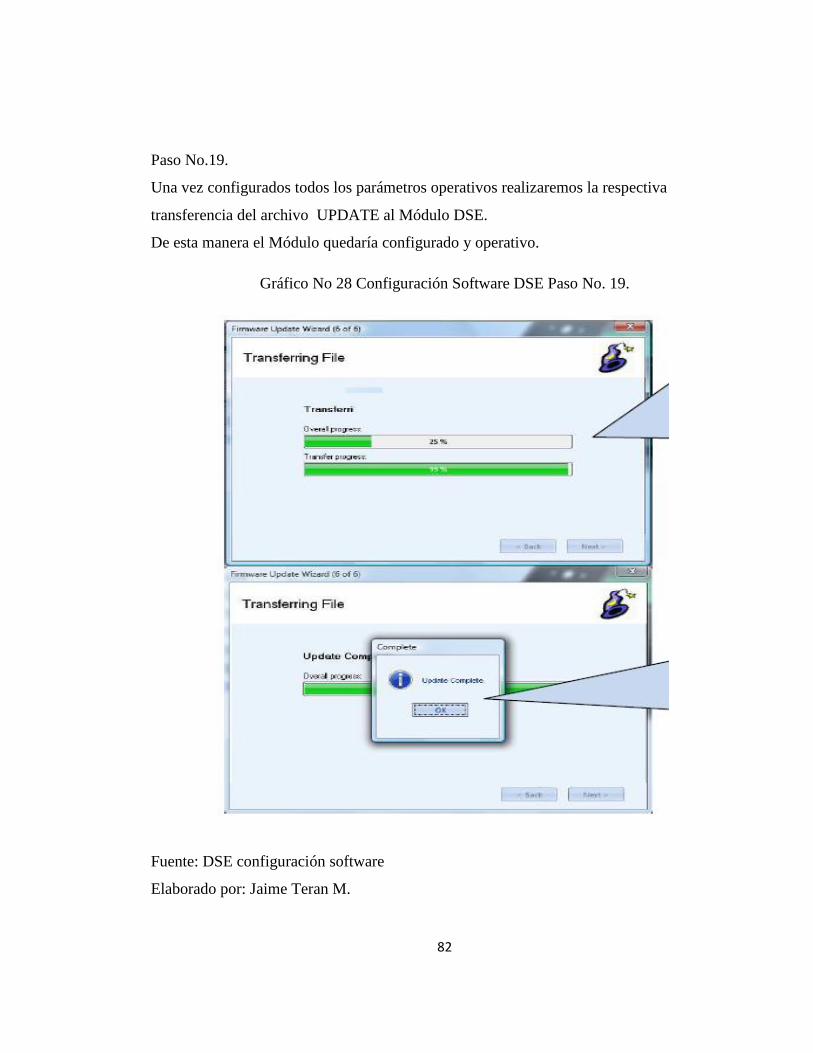
82
Paso No.19.
Una vez configurados todos los parámetros operativos realizaremos la respectiva
transferencia del archivo UPDATE al Módulo DSE.
De esta manera el Módulo quedaría configurado y operativo.
Gráfico No 28 Configuración Software DSE Paso No. 19.
Fuente: DSE configuración software
Elaborado por: Jaime Teran M.

83
3.4. DISEÑO DEL DIAGRAMA DE CONTROL ELÉCTRICO
El diseño del diagrama que se presenta en el anexo No.2 fue desarrollado en base a la
información de instrumentación obtenida de motores Caterpillar, bombas National Oil Well
y bajo el diseño básico del diagrama Deep Sea Electrónic Modelo 6110 obtenido en
archivos de tipo PDF, para su implementación final al sistema de instrumentación de la
Unidad Mobile Test Unit de la compañía Technical System Power se lo realizo en un
formato de dibujo Autocad.
3.4.1. SIMBOLOGÍA ELÉCTRICA
Para realizar la simbología eléctrica de las partes del modulo DSE se lo realizó bajo la
propia nomenclatura de la marca Deep Sea Electronic de esta manera no tendremos con
función al momento de instalar o reemplazar el modulo DSE.
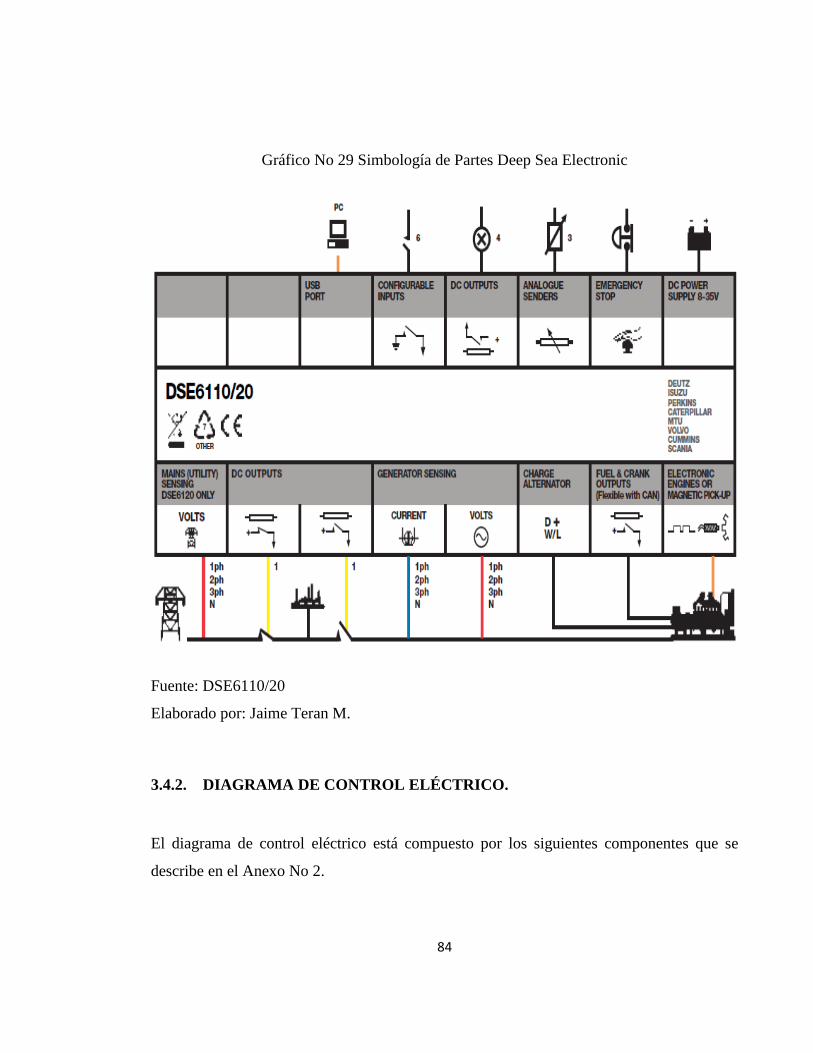
84
Gráfico No 29 Simbología de Partes Deep Sea Electronic
Fuente: DSE6110/20
Elaborado por: Jaime Teran M.
3.4.2. DIAGRAMA DE CONTROL ELÉCTRICO.
El diagrama de control eléctrico está compuesto por los siguientes componentes que se
describe en el Anexo No 2.
85
3.5. FUNCIONAMIENTO DEL SISTEMA.
Esta nueva implementación de módulos DSE para el control de instrumentación y
protección de unidades Mobile Test Unit es muy versátil para el personal involucrado en las
operaciones, teniendo una seguridad del 100% en el funcionamiento de todo el sistema que
se encuentre programado.
3.5.1. PRINCIPIO DE FUNCIONAMIENTO DEL SISTEMA DE
INSTRUMENTACIÓN DE LA UNIDAD MOBIL TEST UNIT (MTU).
El Módulo electrónico DEEP SEA ELECTRONIC está diseñado para trabajar con un
voltaje de 24VDC, suministrado por las baterías, todas las señales tanto del motor como de
la bomba ingresan al DSE, el sensor de presión de aceite del motor, el sensor de
temperatura del refrigerante del motor, el sensor de velocidad del motor, el switch de alta
vibración del motor y la bomba, switch de alta y baja presión de succión, switch de alta y
baja presión de descarga.
Todas estas señales recepta el módulo DSE, cuando exista una variación en las variables
del proceso, el Módulo electrónico DSE comandara la electroválvula de combustible es
decir cortara el suministro del voltaje cuando se presente un cambio drástico en las
variables de proceso.
El Módulo electrónico DSE posee un PLC interno el cual controla por medio de una de sus
salidas digitales la electroválvula de combustible apagando el motor por completo.

86
El motor de combustión interna Caterpillar 3406 es encendido al pulsar el botón verde
Start.
Para apagar el motor de combustión interna pulsaremos el botón rojo stop.
Estos dos pulsadores Verde y Rojo serán los únicos que nos permitan encender y apagar el
sistema Mobile Test Unit. El mal funcionamiento de cualquier variable del proceso será
visible en el módulo DSE y se procederá a su corrección.
Gráfico No 30 Carátula Módulo DSE.
Fuente: DSE Electronic.
Elaborado por: Jaime Teran M.
87
3.5.2. OPERACIÓN DE LA UNIDAD MOBILE TEST UNIT.
Para la operación inicial verificar las marchas de la transmisión de la unidad MTU
se encuentre en estado de Neutro.
Arrancar la unidad desde un panel principal pulsando el botton start.
Verificar parámetros de operación del motor (Presión, Temperatura, Rpm)
Verificar el alineamiento de las válvulas de succión y descarga en posición abiertas
Seleccionar una marcha para transmitir el movimiento a la bomba por medio de la
transmisión.
Calibrar los manómetros Murphy de succión y descarga de la bomba con los
parámetros de evaluación del pozo.
Descargar fluido motriz con la bomba de desplazamiento positivo 300Q alta presión
de fluido motriz hasta el fondo del pozo a evaluar (bomba jet).
El fluido inyectado es medido a través de un medidor de flujo MCII.
El fluido motriz más la producción del pozo retorna hasta el separador.
Separa agua, gas y petróleo.
El agua es reutilizada como fluido motriz, realizamos un circuito cerrado.
El gas es medido y quemado.
La producción del pozo es verificada en los tanques de almacenamiento.
Se toman lecturas hora a hora.
Una vez estabilizada la producción, tenemos datos reales de formación.
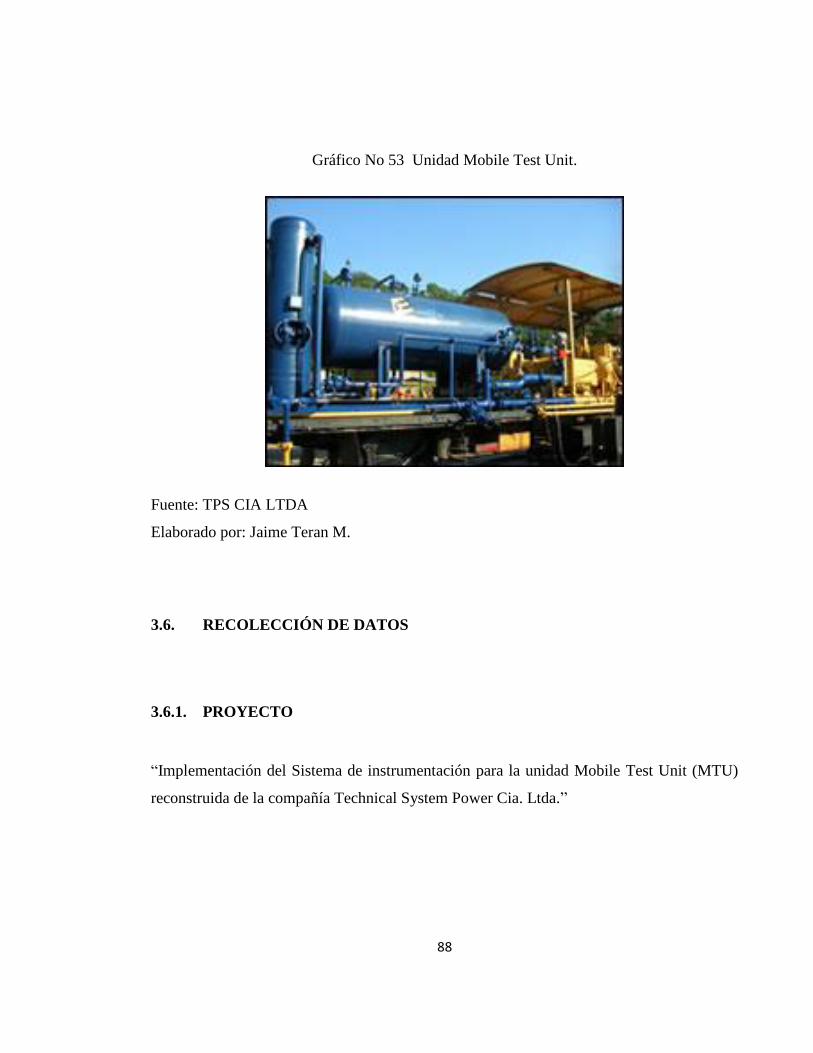
88
Gráfico No 53 Unidad Mobile Test Unit.
Fuente: TPS CIA LTDA
Elaborado por: Jaime Teran M.
3.6. RECOLECCIÓN DE DATOS
3.6.1. PROYECTO
“Implementación del Sistema de instrumentación para la unidad Mobile Test Unit (MTU)
reconstruida de la compañía Technical System Power Cia. Ltda.”

89
3.6.2. LUGAR
Campamento de Technical System Power Cia. Ltda., área de Instrumentación Y Control
ubicados en la Ciudad de Francisco de Orellana.
3.6.3. MÉTODO DE RECOLECCIÓN
El método principal de recolección de datos para este proyecto se lo realizo mediante
investigaciones en las áreas donde se aplica las unidades de evaluación para pozos
petroleros.
Al analizar las unidades que prestan este tipo de servicio, se llegó a determinar que el 60%
de las unidades de evaluación de pozos petroleros no cumplen con el sistema de
instrumentación y control de alarmas motivo por el cual se diseñara este sistema de
instrumentación confiable y versátil para su operación.
3.6.4. DEFINICIÓN OPERACIONAL
Nuestra unidad sirve para evaluar pozos petroleros utilizando el método de bombeo
hidráulico.
Esta unidad permite bombear un caudal hasta 4000 BDP a una presión de 3800 PSI. Su
acumulador permite tener un sistema presurizado, autónomo una vez que se inicia la
prueba.
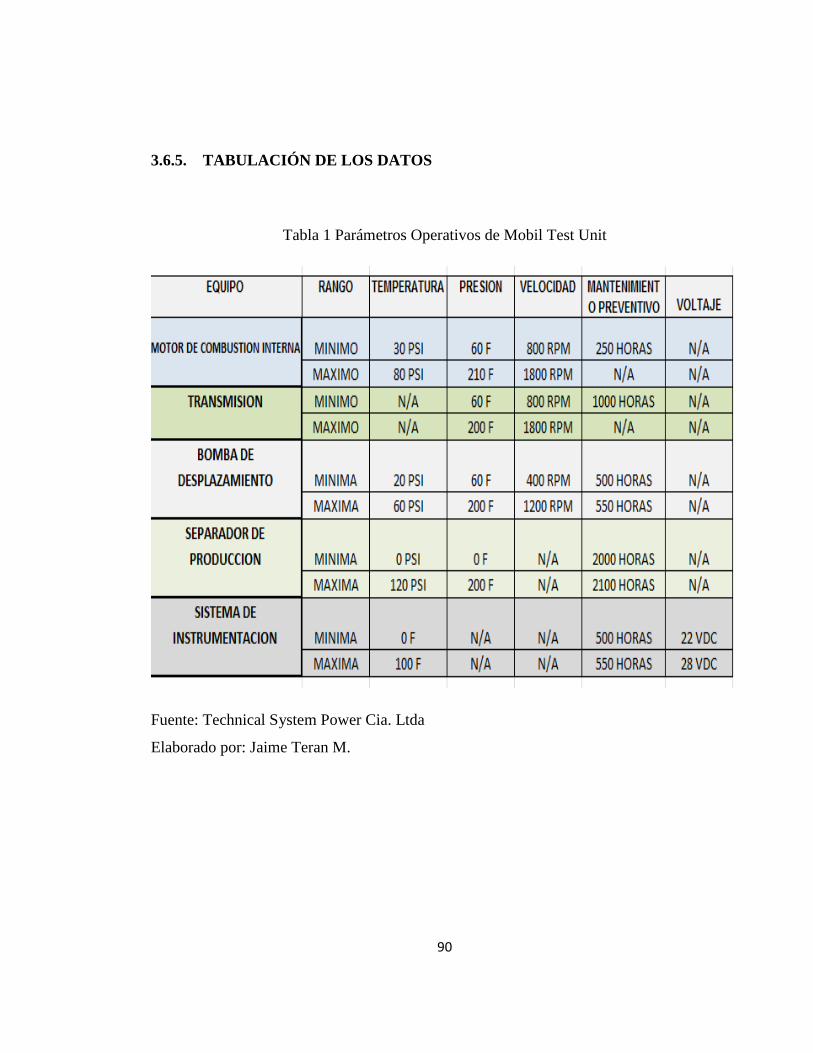
90
3.6.5. TABULACIÓN DE LOS DATOS
Tabla 1 Parámetros Operativos de Mobil Test Unit
Fuente: Technical System Power Cia. Ltda
Elaborado por: Jaime Teran M.

91
3.6.6. INTERPRETACIÓN DE LA INFORMACIÓN
Con la información adquirida mediante el trabajo práctico en campo y la demostración del
sistema de instrumentación con el Módulo electrónico Deep Sea Electronic 6110,
protegiendo la unidad de evaluación de pozos petroleros MTU, demostramos que el sistema
implementado tiene una confiabilidad del 100% en diversas operaciones que se encuentre
la unidad MTU.
Este sistema nos permite descartar cualquier problema en la unidad MTU por fallas de una
mala operación, confirmando en el panel principal de control la falla por la cual se apagó la
unidad.
El sistema de instrumentación implementado nos propone una solución rápida para
encontrar el elemento que se encuentra averiado, indicándonos el tipo de alarma o falla en
el panel principal.
3.7 ESTUDIO TÉCNICO ECONÓMICO DEL PROYECTO
El presente estudio técnico económico del proyecto Mobile Test Unit fue desarrollado en
base a cotizaciones locales y cotizaciones de importación de materiales para
instrumentación de la unidad MTU.
3.7.1. DISEÑO Y FACTIBILIDAD TÉCNICA
Requisición de materiales importados (USA) para el sistema de instrumentación.
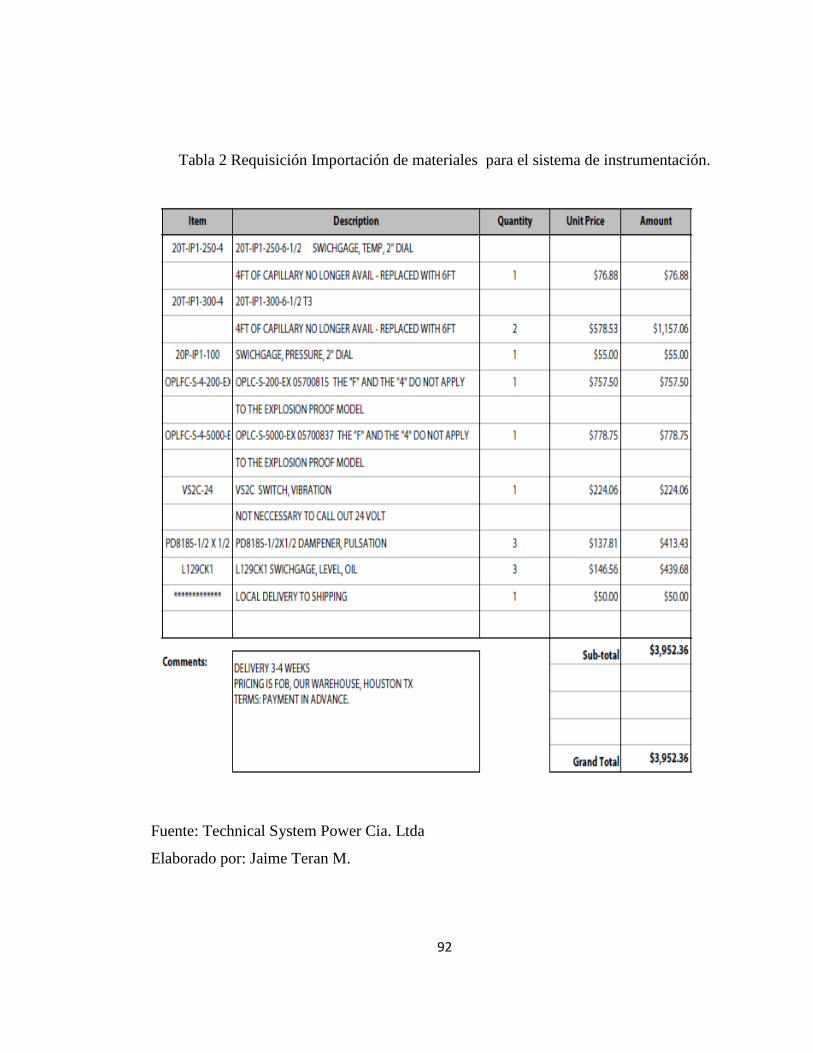
92
Tabla 2 Requisición Importación de materiales para el sistema de instrumentación.
Fuente: Technical System Power Cia. Ltda
Elaborado por: Jaime Teran M.
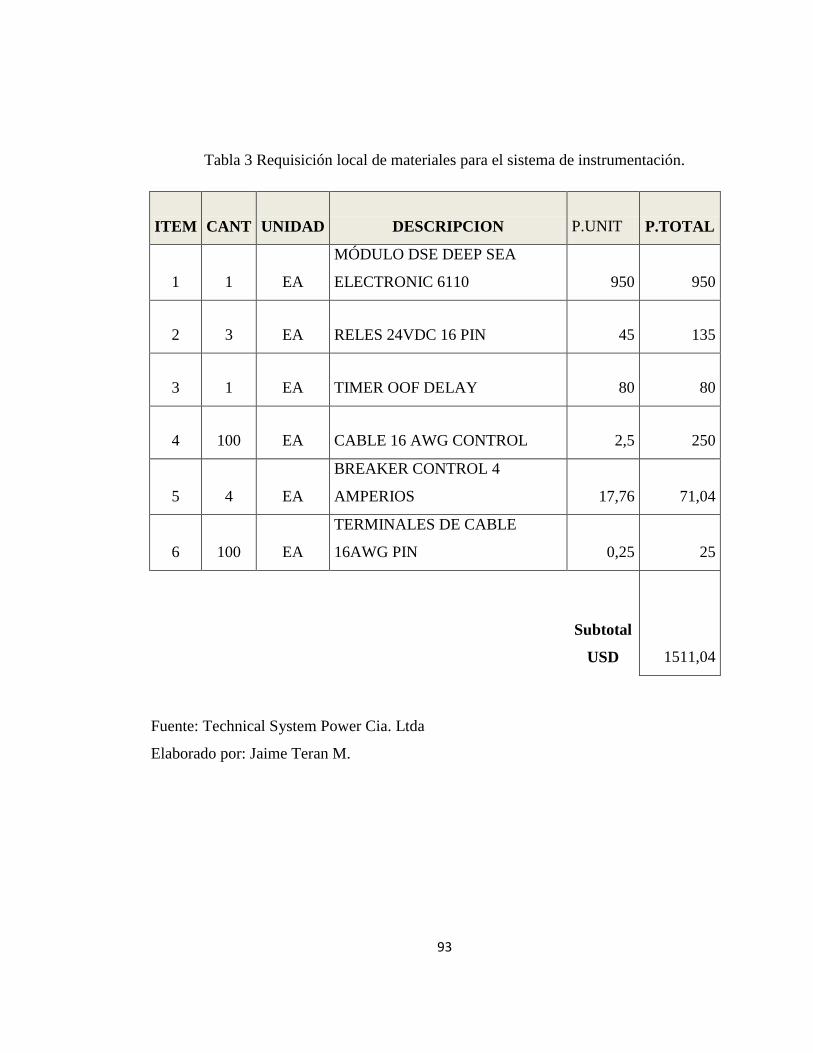
93
Tabla 3 Requisición local de materiales para el sistema de instrumentación.
ITEM CANT UNIDAD DESCRIPCION P.UNIT P.TOTAL
1 1 EA
MÓDULO DSE DEEP SEA
ELECTRONIC 6110 950 950
2 3 EA RELES 24VDC 16 PIN 45 135
3 1 EA TIMER OOF DELAY 80 80
4 100 EA CABLE 16 AWG CONTROL 2,5 250
5 4 EA
BREAKER CONTROL 4
AMPERIOS 17,76 71,04
6 100 EA
TERMINALES DE CABLE
16AWG PIN 0,25 25
Subtotal
USD 1511,04
Fuente: Technical System Power Cia. Ltda
Elaborado por: Jaime Teran M.
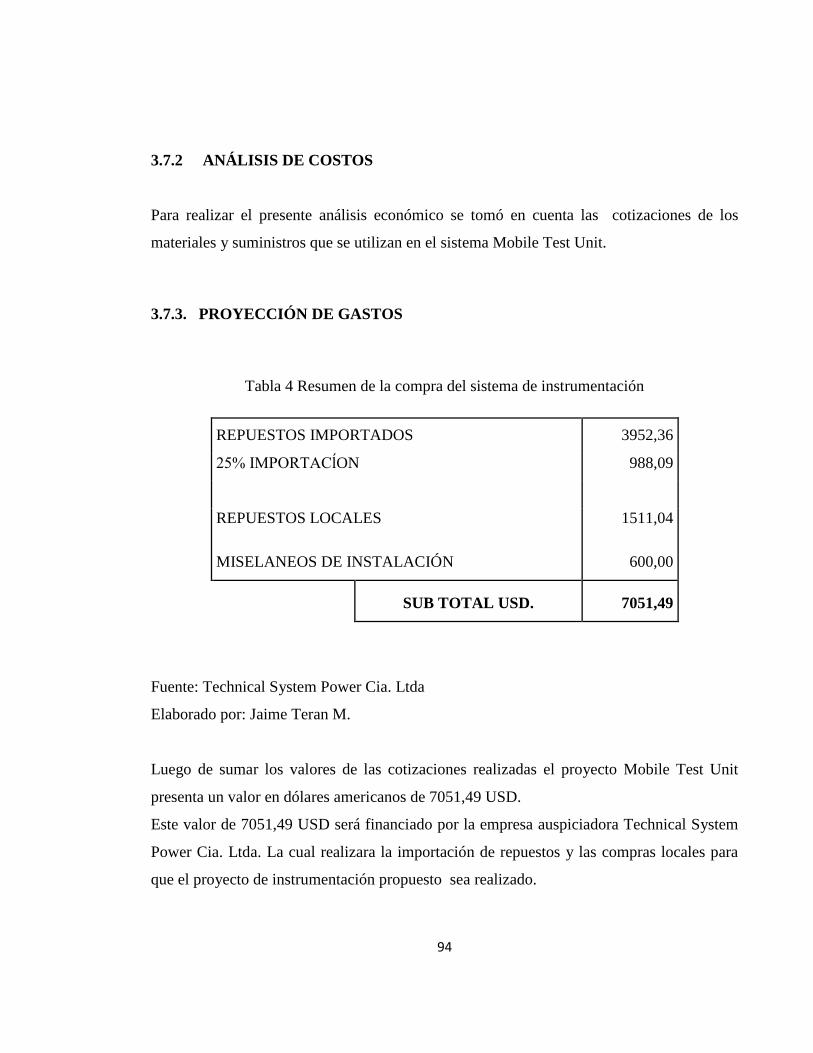
94
3.7.2 ANÁLISIS DE COSTOS
Para realizar el presente análisis económico se tomó en cuenta las cotizaciones de los
materiales y suministros que se utilizan en el sistema Mobile Test Unit.
3.7.3. PROYECCIÓN DE GASTOS
Tabla 4 Resumen de la compra del sistema de instrumentación
REPUESTOS IMPORTADOS 3952,36
25% IMPORTACĺON 988,09
REPUESTOS LOCALES 1511,04
MISELANEOS DE INSTALACIÓN 600,00
SUB TOTAL USD. 7051,49
Fuente: Technical System Power Cia. Ltda
Elaborado por: Jaime Teran M.
Luego de sumar los valores de las cotizaciones realizadas el proyecto Mobile Test Unit
presenta un valor en dólares americanos de 7051,49 USD.
Este valor de 7051,49 USD será financiado por la empresa auspiciadora Technical System
Power Cia. Ltda. La cual realizara la importación de repuestos y las compras locales para
que el proyecto de instrumentación propuesto sea realizado.
CAPÍTULO IV
95
CAPITULO IV
4. CONCLUSIONES Y RECOMENDACIONES
4.1. CONCLUSIONES
De las pruebas realizadas y del análisis de los resultados se pueden obtener las
conclusiones siguientes.
En la actualidad los equipos de superficie para bombeo hidráulico y evaluación de
pozos también llamadas Unidades Mobile Test Unit (MTU) conforman un 60% de
todos los sistemas de bombeo y evaluación en los campos petroleros.
El sistema de Unidades Mobile Test Unit (MTU) es altamente utilizado para la
extracción y evaluación de crudo en producción en la mayoría de empresas estatales
y privadas.
Actualmente Technical System Power se encuentra re construyendo su unidad
Mobile Test Unit (MTU) con todas las seguridades que necesita esta unidad para
brindar a sus clientes una operación basada en la confiabilidad.
El nuevo sistema de instrumentación implementado en la unidad Mobile Test Unit
(MTU) es el primer sistema con Módulo inteligente aplicado en este tipo de unidad
de evaluación y de producción de crudo.
El nuevo sistema de instrumentación implementado con el módulo Deep Sea
Electronic es sumamente versátil y programable con la mayoría de unidades de
evaluación, puede operar sistemas de control y monitoreo de cualquier tipo de
motor y bombas triplex, quintuplex y horizontales.
96
4.2. RECOMENDACIONES.
Poner en marcha proyectos que permitan la optimización de otros sistemas de
instrumentación, utilizando el módulo de control inteligente Deep Sea Electronic.
(DSE).
Poner en marcha el sistema de protecciones para bombas hidráulicas de alta presión,
con el Módulo electrónico Deep Sea Electronic en los diferentes campos
petroleros.
Ejecutar programas de automatización y control en las facilidades de los diferentes
campos, para mejora la calidad en las operaciones en los diferentes Well Pad.
Implementar nuevos sistemas de mejoramiento continuo en las unidades de Bombeo
Hidráulico aprovechando la tecnología actual para proteger la integridad del
personal involucrado en las operaciones y la inversión que realiza la compañía en la
implementación de las unidades Mobile Test Unit.
Implementar charlas en campo al personal involucrado en las operaciones, sobre el
funcionamiento del nuevo sistema de implementación de instrumentación a la
unidad re construida de Technical System Power.
97
BIBLIOGRAFĺA
1. Aguilar,L (1994) Curso de técnicas Investigativas Quito Ecuador.
2. Ary, Jacobs y Razaviech (1990) Estudios Descriptivos
3. Abraham, G. (1995) Curso de técnicas de Investigación y Metodología del Estudio
Ediciones Serie Didáctica A.G Quito Ecuador.
4. ALMEIDA RAUL.: Texto guía Bombeo Hidráulico Universidad Tecnológica
Equinoccial, 2006.
5. CATERPILLAR ILLINOIS.: Services and Parts Manual 3406C.
6. DEEP SEA ELECTRONIC PLC.: Manual de instalación y servicio, Re
7. http://www.deepseaplc.com/home:Página Principal de Selección de Módulos DSE
8. http://www.petroblogger.com/2010/08/bombeo-hidraulico-jet.html Explicación de
bombeo hidráulico y bombas tipo jet.
9. http://www.sertecpet.com.ec Bombas Jet Claw
10. Gutiérrez (1990), Metodología de la investigación v. 1 2010.
11. MURPHY FW.: Manual selección Instrumentos de procesos.
12. National Oil Well Pump: Services and Parts Manual 300Q/500Q
98
.
ANEXO 1
Anexo 1 VESSEL DE FLUIDO MOTRIZ / SEPARADOR DE PRODUCCIÓN
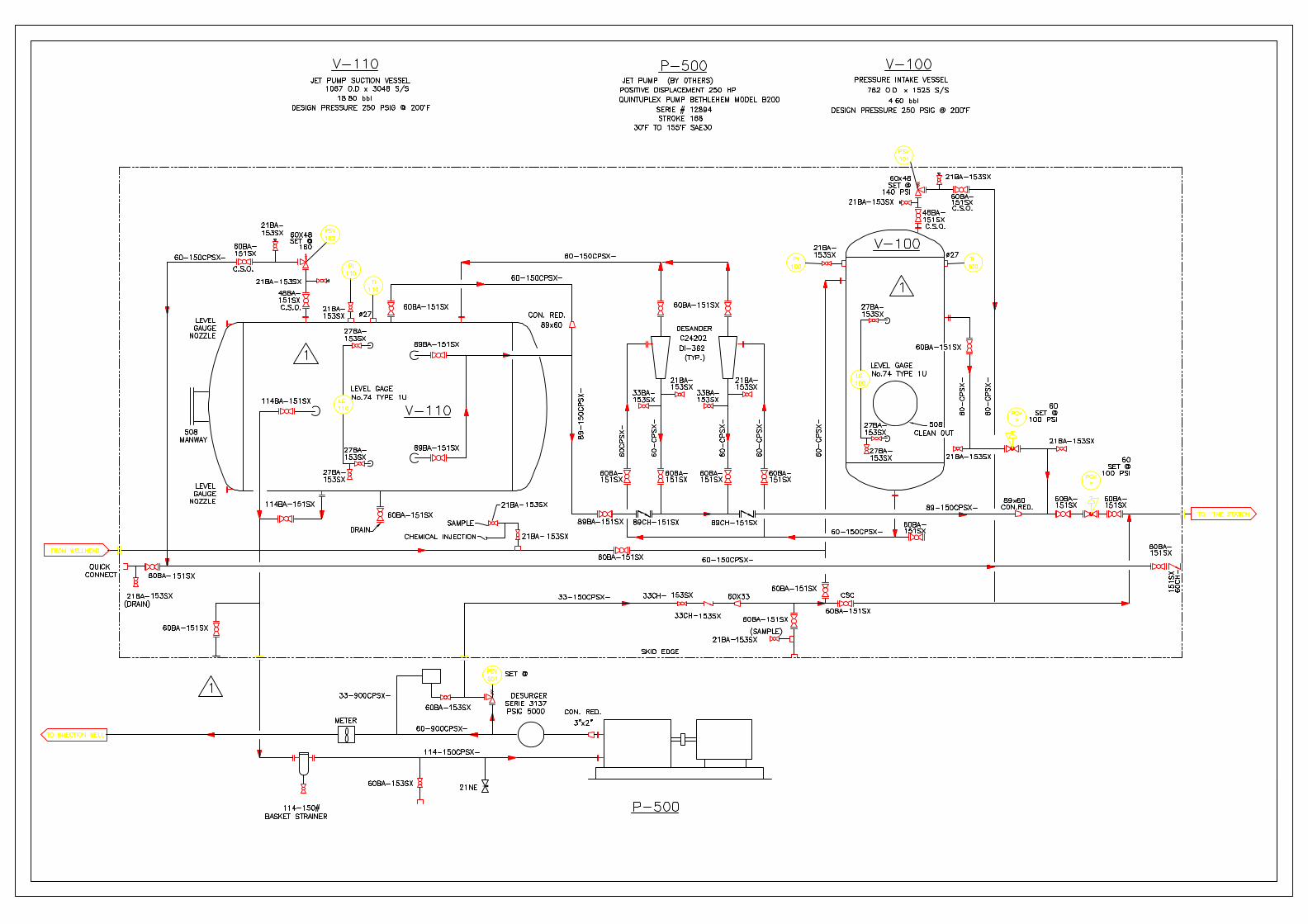

99
ANEXO 2
Anexo 2 INSTRUMENTACIÓN DEEP SEA ELECTRONIC
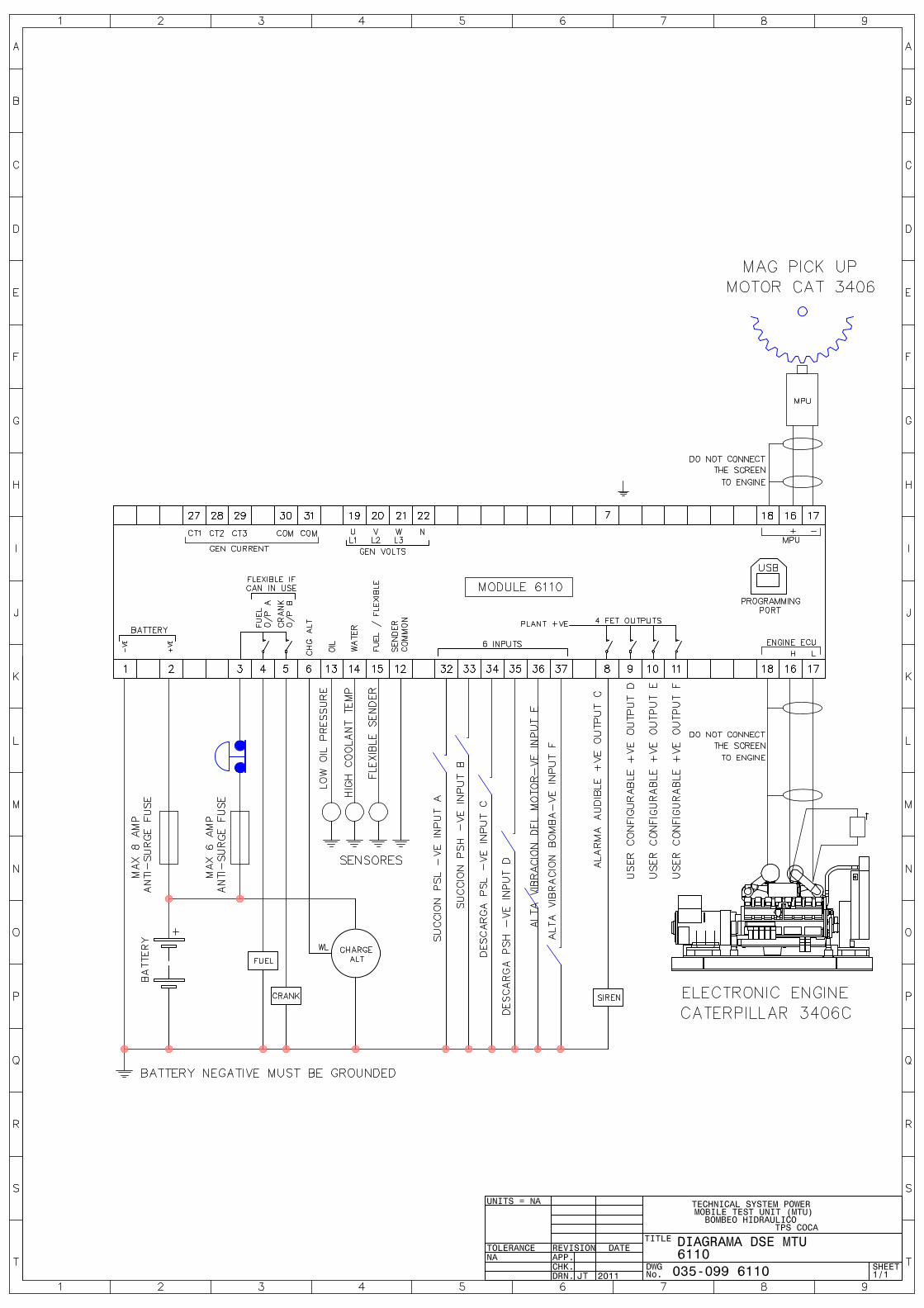
100
ANEXO 3
DATA SHEET MÓDULO DEEP SEA ELECTRONIC SERIE 6110/20

101
102
ANEXO 4
INSTALACIÓN MÓDULO DEEP SEA ELECTRONIC SERIE 6110
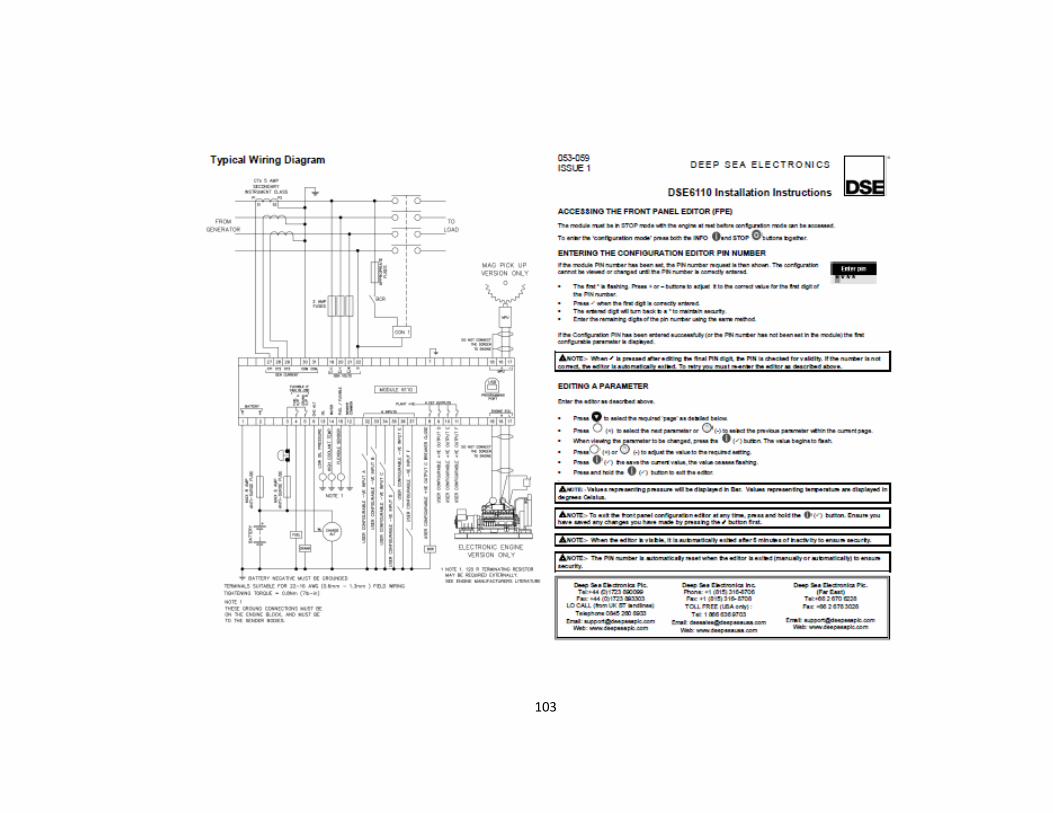
103
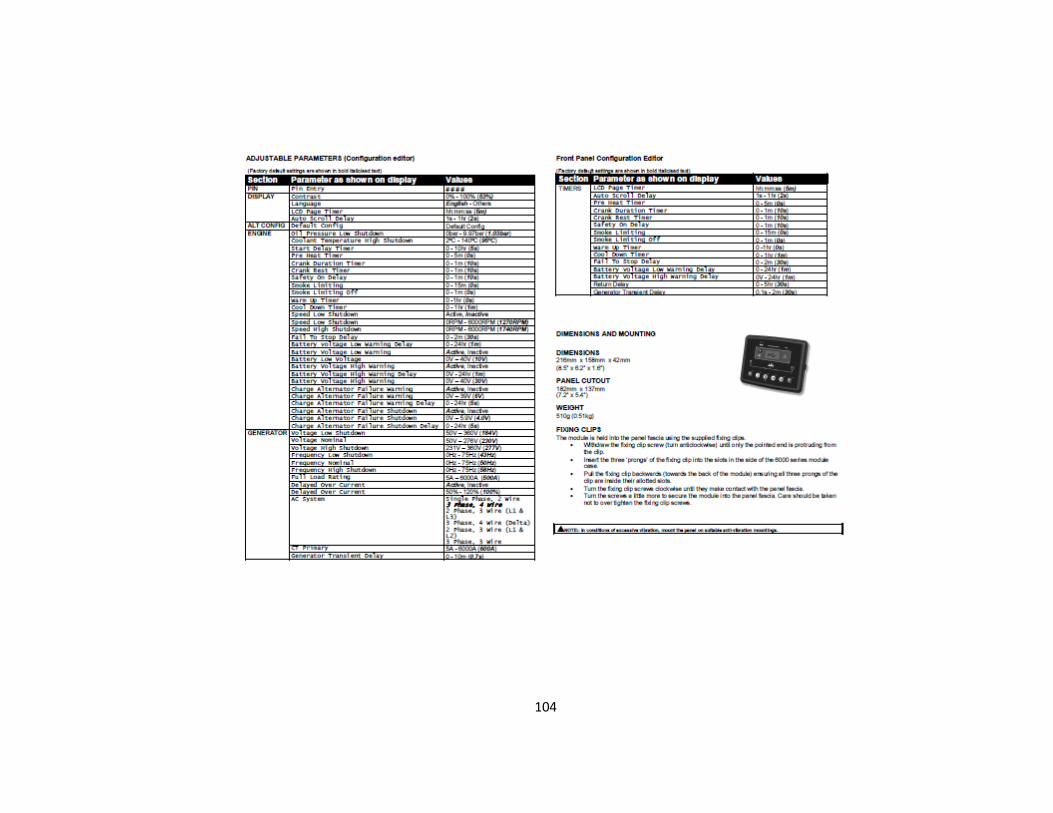
104