final report ssg 2.194 gps water level...
TRANSCRIPT
Chairman: Gerry Mader (USA)Co-chairs: Doug Martin (USA) & Tilo Schöne (Germany)
Final report SSG 2.194GPS water level measurements
Prepared by: Tilo Schöne, GFZ Potsdam, Germany
Introduction...........................................................................................................................1SSG 2.194 WEB Server .........................................................................................................1Meetings with SSG 2.194 Participation..................................................................................2REPORTS provided by the MEMBERS................................................................................3
University of Tasmania.................................................................................................. 10ETH Zurich......................................................................................................................3GFZ Potsdam...................................................................................................................3Institut d'Estudis Espacials de Catalunya & Institut de Ciències del Mar ..........................4Naval Oceanographic Office............................................................................................5Observatoire de la Côte d’Azur - CERGA........................................................................6Technische Universiät Dresden........................................................................................7The Ohio State University................................................................................................7Universität der Bundeswehr München..............................................................................9Universitat Politecnica de Catalunya................................................................................9
Publications by the Members...............................................................................................10
Introduction
The SSG acts as a forum to exchange information about using GPS-buoys primarily formeasuring the instantaneous sea level. Originally the establishment of the SSG was arequest of the community to calibrate and monitor the satellite radar altimetry (RA)measurements of recent and forthcoming RA missions. Beside this, members of the groupare using the techniques also for river or lake level monitoring as well as for connectingremote tide gauges to a global reference frame.The GPS buoy technique is still very new. Different groups are using different types ofbuoys and concepts. One common design is a life-saver type of buoys. The concept isvery straightforward and gives good results. Another concept is using ruggedized types ofbuoys, which are more suitable for harsh conditions and long-term deployment.Unfortunately this concept is very expensive. For example, for the absolute calibrationcampaign of ENVISAT, the European Space Agency ESA selected a dual concept:ruggedized buoys for the long-term measurements and using life-saver types of buoys in aleapfrog scenario to get more calibration values, if the weather permits operations. In thepast two years several campaigns using both type of GPS buoys were carried out.However, an intercomparison of both techniques still needs to be performed.
SSG 2.194 WEB Server (http://op.gfz-potsdam.de/altimetry/SSG_buoys/)
A web page was established for Special Study Group 2.194 "GPS Water LevelMeasurements" on the GFZ web server in Potsdam. In addition to the Terms of referencefor SSG 2.194, the web site provides a list of the members with contact information,
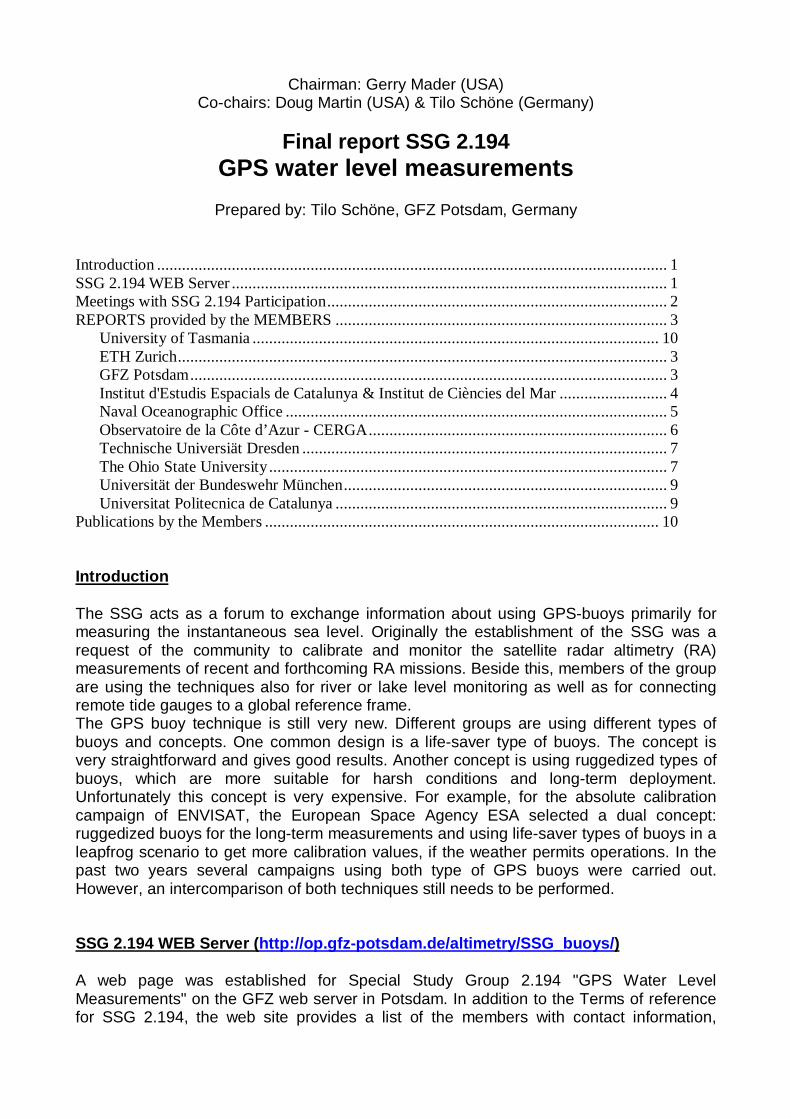
Information activities and news of pending conferences and workshops, an electroniclibrary, and an opportunity for members to submit a Technical Note on research anddevelopment activities to create a forum for discussing technical issues related to GPSwater level measurements. Unfortunately, this feature has not been as active as the Chairshad hoped”. The electronic library is widely used but needs more frequent updating.
Figure 1: Access statistics to the WEB server
Meetings with SSG 2.194 Participation
A meeting was held in 2000 during the EGS in Nice. Here, mostly colleagues from Europeattended the meeting. In total 5 presentations were given (for the full report see the SSGWEB-page athttp://op.gfz-potsdam.de/altimetry/SSG_buoys/ssg_meeting_nice.html).
During the Asia-Pacific Space Geodynamic Project (APSG) Sea Level Workshop held aspart of the GLOSS GE7 Meeting in Honolulu, Hawaii (April 23 & 24, 2001) a specialsession of the SSG was held. In total 7 presentations (oral and poster) were given:
T. Schöne, Ch. Reigber, A. Braun, M. Forberg, R. Galas: GPS Buoys for calibrating Radar Altimeters for theSEAL Project
M. Bushnell, D. Martin, and J. Sprinke, M. Chin, S. Cofer, D. Crump, and G. Mader, Frank Aikman: ImprovedDesign of the National Ocean Service (NOS) GPS Buoy System
P. Bonnefond, P. Exertier, and Y. Menard: Radar altimeter calibration using a GPS-Buoy in CorsicaP. Bonnefond, P. Exertier, and Y. Menard: Leveling the sea surface using a GPS CatamaranR. Coleman, C. Watson, N. White, J. Church and R. Govind: Absolute altimeter verification activities in Bass
Strait, AustraliaX. Dong, P. Woodworth, P. Moore, and R. Bingley: Absolute calibration of TOPEX/POSEIDON and JASON-1
using UK tide gauges, GPS and local precise Geoid modelM.Martinez-Garcia, J.J. Martinez-Benjamin, and M.A. Ortiz-Castellon: GPS buoys technology applied to the
absolute calibration of space radar altimeters and to the regional mapping the sea surface topography
Abstracts of this meeting have been published by IOC (Intergovernmental OceanographicCommission, Workshop Report No. 180, UNESCO, 2002) and are available via the SSG’sWEB page.
REPORTS provided by the MEMBERS
(For the mid-term r eport see the SSG’s home page)
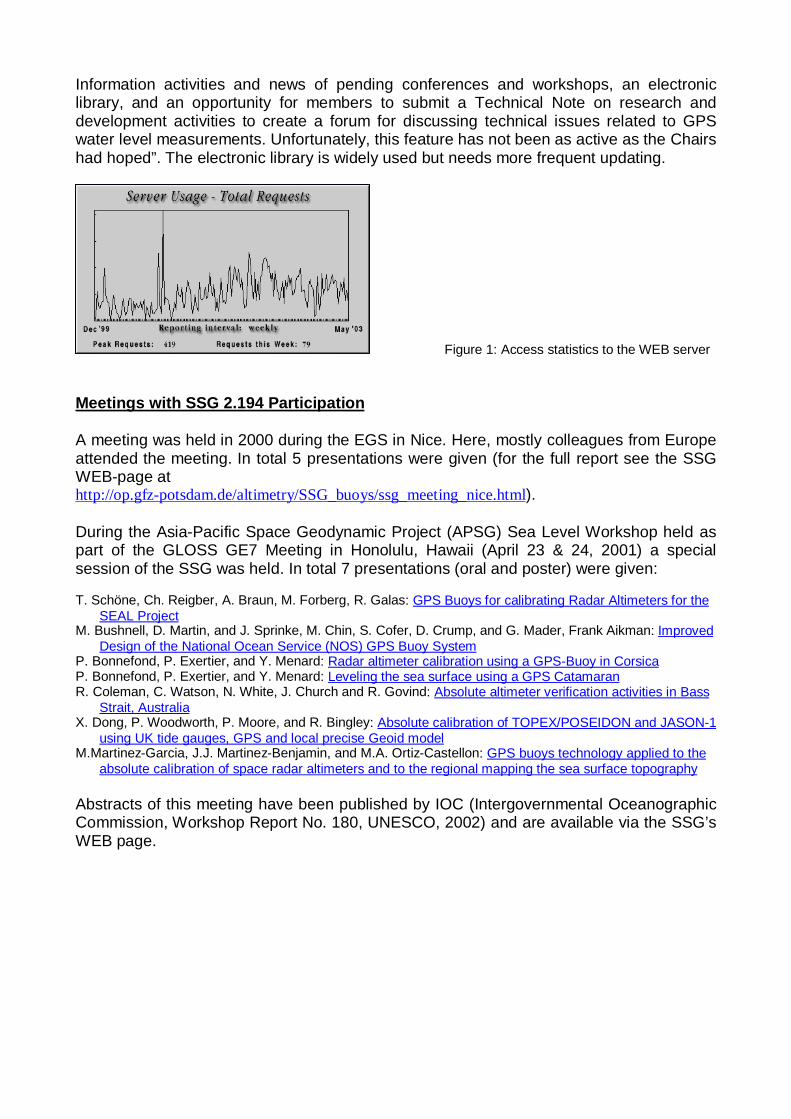
ETH Zurich, Geomatics (GGL), SwitzerlandA. Geiger, H.-G. Kahle: Lightweight offshore buoys
New buoys have been designed based on previous experiences. The newly developedbuoys have a displacement of 10 kg which is a significant weight reduction compared tothe predecessor. With its 40 cm diameter it can easily be handled. The dimension “of thebuoy, weight of battery, receiver, and antenna have optimally been chosen and designedin order to reach the exact floating balance. No ballast is needed to stabilize the buoy or toreach the foreseen floating line in the middle of the spherical buoy. The shell is fabricatedfrom polycarbonate, which is transparent for the microwaves also. Therefore, the wholebuoy can be waterproofed sealed containing the battery, receiver and antenna. Forpresent buoy experiments two Novatel DL-4 have been installed. The new pinwheelantenna is used. The operation autonomy reaches about 20 hours. The measurement ratecan be set to 0.5 sec sampling interval, producing about 5 MB data per hour. First testswhere successfully completed. The buoys will be used to calibrated sea surfacedetermination techniques such as airborne or satellite altimetry. The GGL group is alsoinvolved in the calibration of the Jason altimetry.
Fig.1: The new buoy on test in a friendly sea
GeoForschungsZentrum Potsdam (GFZ), Germany
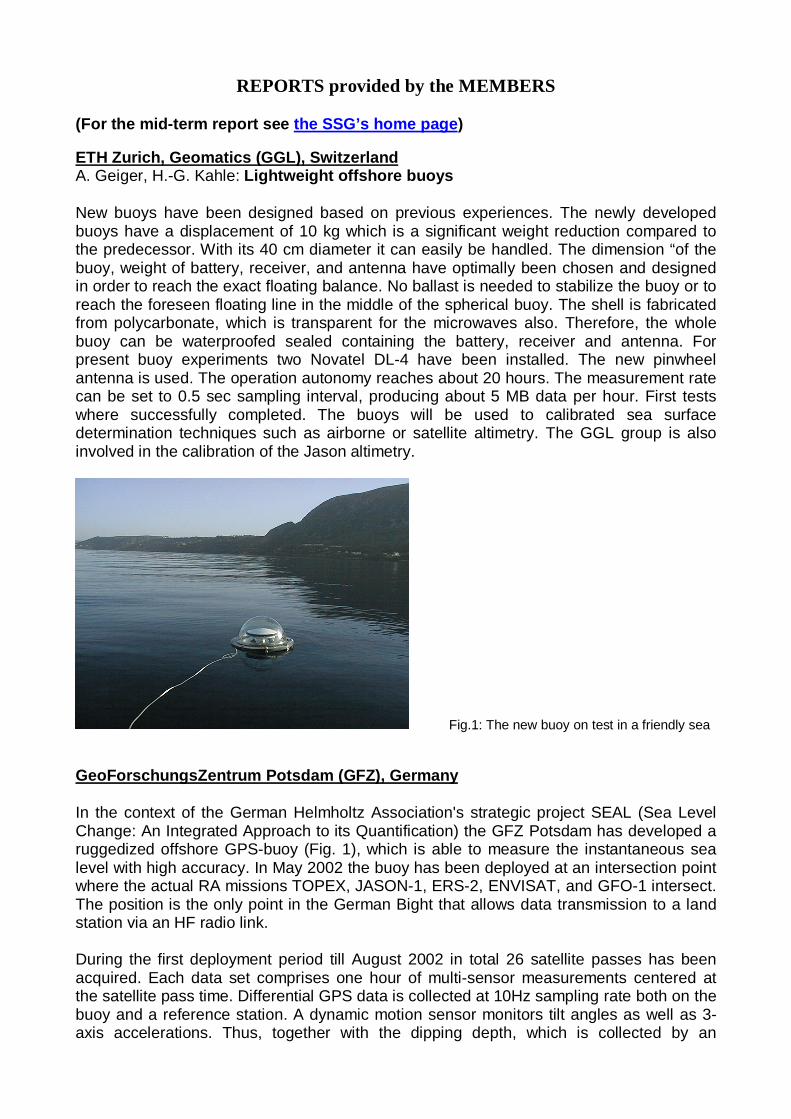
In the context of the German Helmholtz Association's strategic project SEAL (Sea LevelChange: An Integrated Approach to its Quantification) the GFZ Potsdam has developed aruggedized offshore GPS-buoy (Fig. 1), which is able to measure the instantaneous sealevel with high accuracy. In May 2002 the buoy has been deployed at an intersection pointwhere the actual RA missions TOPEX, JASON-1, ERS-2, ENVISAT, and GFO-1 intersect.The position is the only point in the German Bight that allows data transmission to a landstation via an HF radio link.
During the first deployment period till August 2002 in total 26 satellite passes has beenacquired. Each data set comprises one hour of multi-sensor measurements centered atthe satellite pass time. Differential GPS data is collected at 10Hz sampling rate both on thebuoy and a reference station. A dynamic motion sensor monitors tilt angles as well as 3-axis accelerations. Thus, together with the dipping depth, which is collected by an
underwater pressure sensor, the GPS antenna height can be reduced to the instantaneoussea surface height for every single GPS measurement. Additionally several meteorologicalsensors provide data every 10 minutes (e.g. air and water temperature, air pressure, winddirection and speed) and three moored tide gauge sensors in the vicinity and a wave tiderecorder beneath the GPS-buoy allow to account for the sea surface slope and significantwave height, respectively.
Fig. 1: GFZ’s ruggedized GPS buoy
The resulting series of coincident measurements is used to derive a range bias for eachradar altimeter; the envisaged long-term deployment will allow the monitoring of allmissions. Additional information on: http://op.gfz-potsdam.de/seal/.
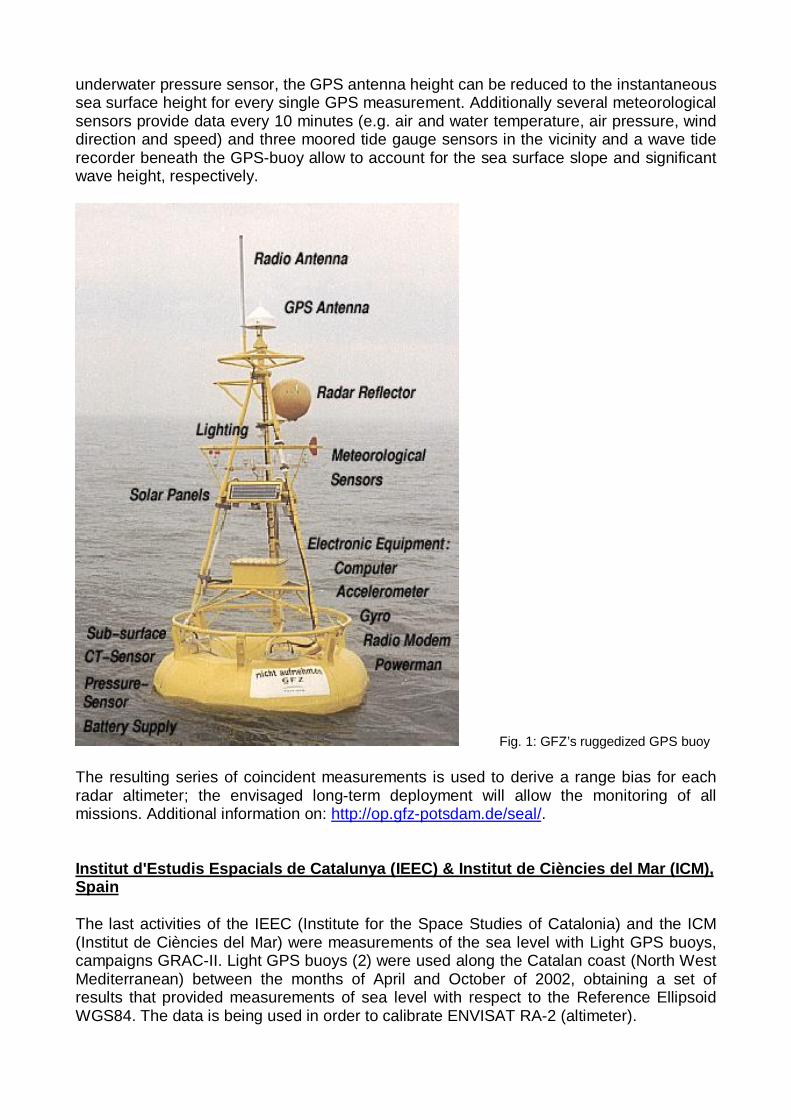
Institut d'Estudis Espacials de Catalunya (IEEC) & Institut de Ciències del Mar (ICM),Spain
The last activities of the IEEC (Institute for the Space Studies of Catalonia) and the ICM(Institut de Ciències del Mar) were measurements of the sea level with Light GPS buoys,campaigns GRAC-II. Light GPS buoys (2) were used along the Catalan coast (North WestMediterranean) between the months of April and October of 2002, obtaining a set ofresults that provided measurements of sea level with respect to the Reference EllipsoidWGS84. The data is being used in order to calibrate ENVISAT RA-2 (altimeter).
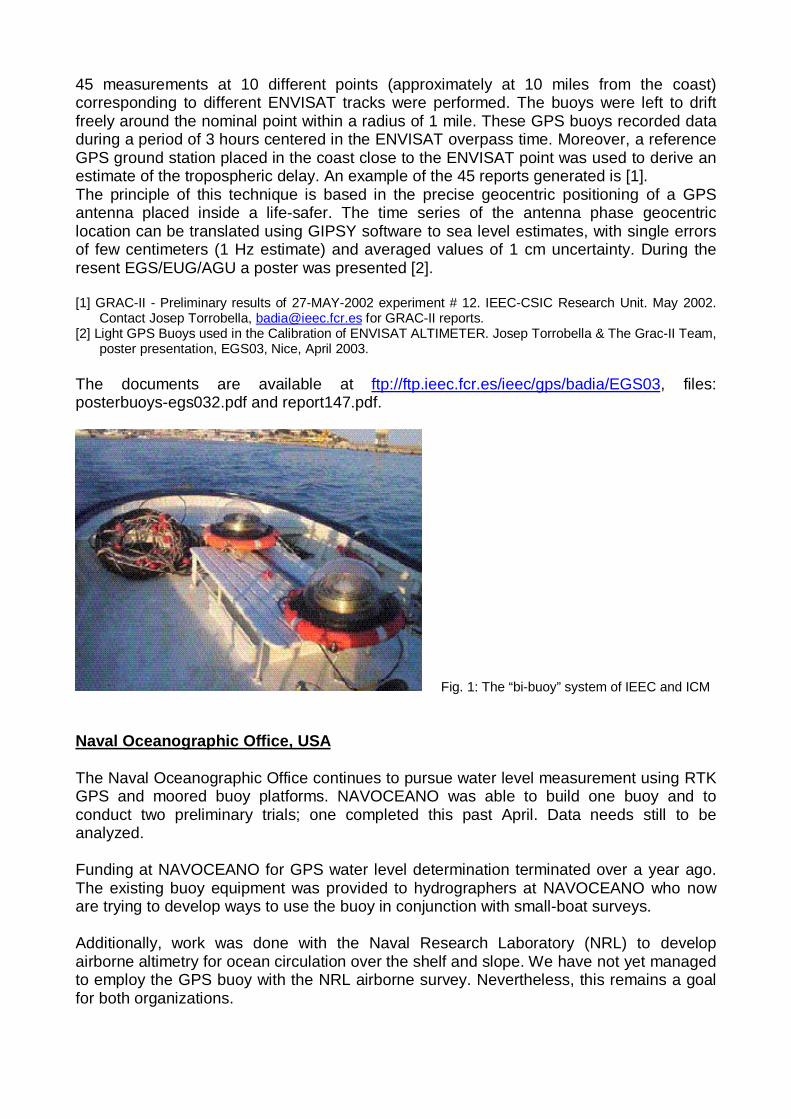
45 measurements at 10 different points (approximately at 10 miles from the coast)corresponding to different ENVISAT tracks were performed. The buoys were left to driftfreely around the nominal point within a radius of 1 mile. These GPS buoys recorded dataduring a period of 3 hours centered in the ENVISAT overpass time. Moreover, a referenceGPS ground station placed in the coast close to the ENVISAT point was used to derive anestimate of the tropospheric delay. An example of the 45 reports generated is [1].The principle of this technique is based in the precise geocentric positioning of a GPSantenna placed inside a life-safer. The time series of the antenna phase geocentriclocation can be translated using GIPSY software to sea level estimates, with single errorsof few centimeters (1 Hz estimate) and averaged values of 1 cm uncertainty. During theresent EGS/EUG/AGU a poster was presented [2].
[1] GRAC-II - Preliminary results of 27-MAY-2002 experiment # 12. IEEC-CSIC Research Unit. May 2002.Contact Josep Torrobella, [email protected] for GRAC-II reports.
[2] Light GPS Buoys used in the Calibration of ENVISAT ALTIMETER. Josep Torrobella & The Grac-II Team,poster presentation, EGS03, Nice, April 2003.
The documents are available at ftp://ftp.ieec.fcr.es/ieec/gps/badia/EGS03, files:posterbuoys-egs032.pdf and report147.pdf.
Fig. 1: The “bi-buoy” system of IEEC and ICM
Naval Oceanographic Office, USA
The Naval Oceanographic Office continues to pursue water level measurement using RTKGPS and moored buoy platforms. NAVOCEANO was able to build one buoy and toconduct two preliminary trials; one completed this past April. Data needs still to beanalyzed.
Funding at NAVOCEANO for GPS water level determination terminated over a year ago.The existing buoy equipment was provided to hydrographers at NAVOCEANO who noware trying to develop ways to use the buoy in conjunction with small-boat surveys.
Additionally, work was done with the Naval Research Laboratory (NRL) to developairborne altimetry for ocean circulation over the shelf and slope. We have not yet managedto employ the GPS buoy with the NRL airborne survey. Nevertheless, this remains a goalfor both organizations.
Observatoire de la Côte d’Azur - CERGABonnefond, P., P. Exertier, O. Laurain, F. Barlier, Y. Ménard, E. Jeansou, A. Orsoni: RadarAltimeter Calibration using a GPS-buoy in CorsicaObservatoire de la Côte d’Azur - CERGA, avenue N. Copernic, F-06130 GrasseCentre National d’Etudes Spatiales, avenue E. Belin, F-31055 Toulouse
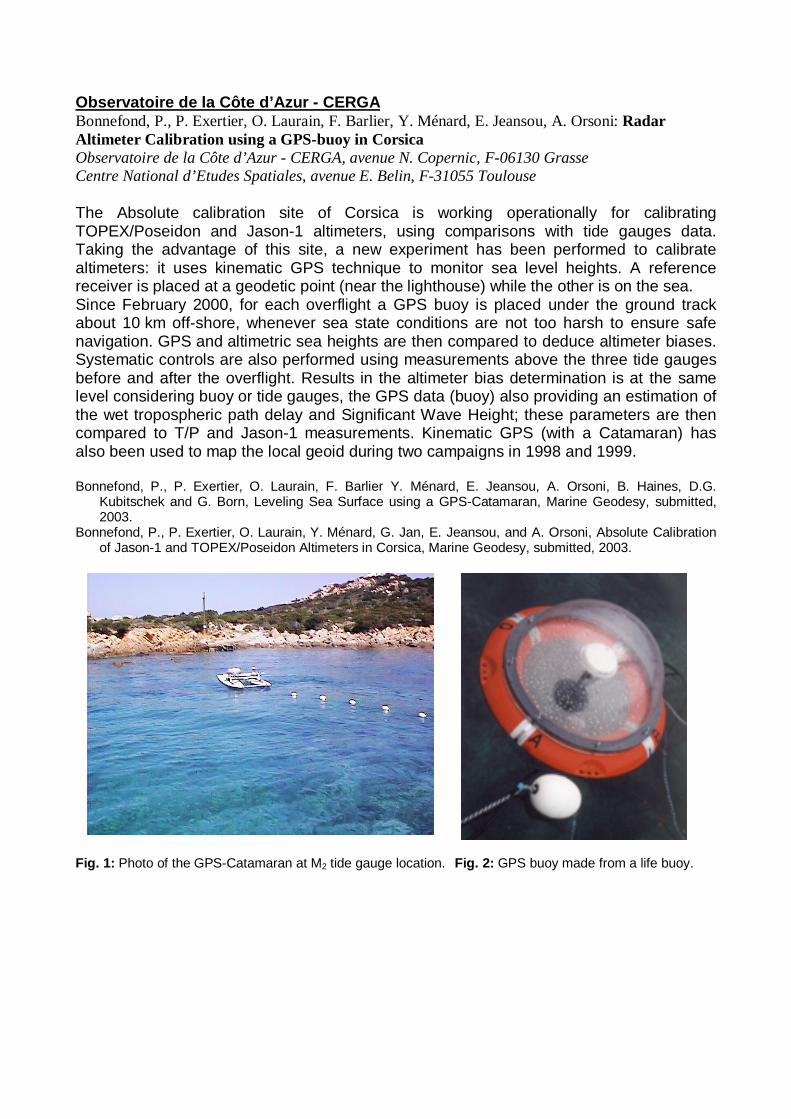
The Absolute calibration site of Corsica is working operationally for calibratingTOPEX/Poseidon and Jason-1 altimeters, using comparisons with tide gauges data.Taking the advantage of this site, a new experiment has been performed to calibratealtimeters: it uses kinematic GPS technique to monitor sea level heights. A referencereceiver is placed at a geodetic point (near the lighthouse) while the other is on the sea.Since February 2000, for each overflight a GPS buoy is placed under the ground trackabout 10 km off-shore, whenever sea state conditions are not too harsh to ensure safenavigation. GPS and altimetric sea heights are then compared to deduce altimeter biases.Systematic controls are also performed using measurements above the three tide gaugesbefore and after the overflight. Results in the altimeter bias determination is at the samelevel considering buoy or tide gauges, the GPS data (buoy) also providing an estimation ofthe wet tropospheric path delay and Significant Wave Height; these parameters are thencompared to T/P and Jason-1 measurements. Kinematic GPS (with a Catamaran) hasalso been used to map the local geoid during two campaigns in 1998 and 1999.
Bonnefond, P., P. Exertier, O. Laurain, F. Barlier Y. Ménard, E. Jeansou, A. Orsoni, B. Haines, D.G.Kubitschek and G. Born, Leveling Sea Surface using a GPS-Catamaran, Marine Geodesy, submitted,2003.
Bonnefond, P., P. Exertier, O. Laurain, Y. Ménard, G. Jan, E. Jeansou, and A. Orsoni, Absolute Calibrationof Jason-1 and TOPEX/Poseidon Altimeters in Corsica, Marine Geodesy, submitted, 2003.
Fig. 1: Photo of the GPS-Catamaran at M2 tide gauge location. Fig. 2: GPS buoy made from a life buoy.
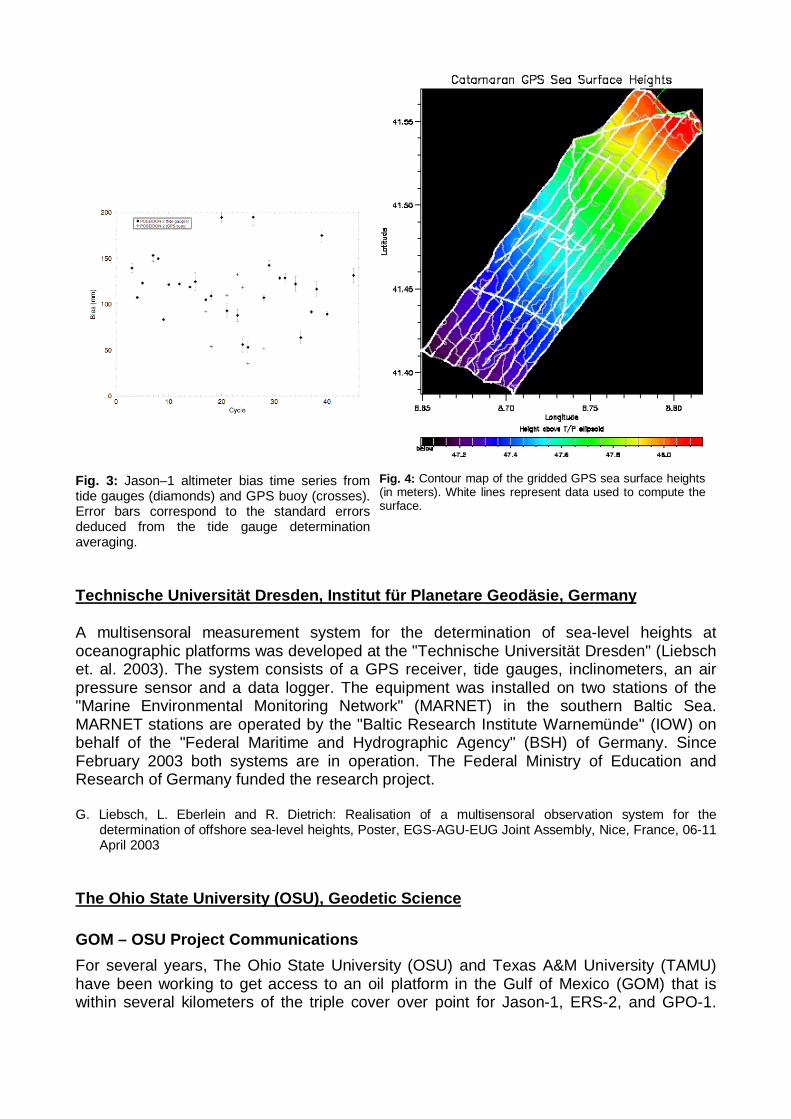
Fig. 3: Jason–1 altimeter bias time series fromtide gauges (diamonds) and GPS buoy (crosses).Error bars correspond to the standard errorsdeduced from the tide gauge determinationaveraging.
Fig. 4: Contour map of the gridded GPS sea surface heights(in meters). White lines represent data used to compute thesurface.
Technische Universität Dresden, Institut für Planetare Geodäsie, Germany
A multisensoral measurement system for the determination of sea-level heights atoceanographic platforms was developed at the "Technische Universität Dresden" (Liebschet. al. 2003). The system consists of a GPS receiver, tide gauges, inclinometers, an airpressure sensor and a data logger. The equipment was installed on two stations of the"Marine Environmental Monitoring Network" (MARNET) in the southern Baltic Sea.MARNET stations are operated by the "Baltic Research Institute Warnemünde" (IOW) onbehalf of the "Federal Maritime and Hydrographic Agency" (BSH) of Germany. SinceFebruary 2003 both systems are in operation. The Federal Ministry of Education andResearch of Germany funded the research project.
G. Liebsch, L. Eberlein and R. Dietrich: Realisation of a multisensoral observation system for thedetermination of offshore sea-level heights, Poster, EGS-AGU-EUG Joint Assembly, Nice, France, 06-11April 2003
The Ohio State University (OSU), Geodetic Science
GOM – OSU Project Communications
For several years, The Ohio State University (OSU) and Texas A&M University (TAMU)have been working to get access to an oil platform in the Gulf of Mexico (GOM) that iswithin several kilometers of the triple cover over point for Jason-1, ERS-2, and GPO-1.
There were a number of set backs when the lease blocks were sold and new operatorshad to be contacted. However, that is now history and we can move forward.
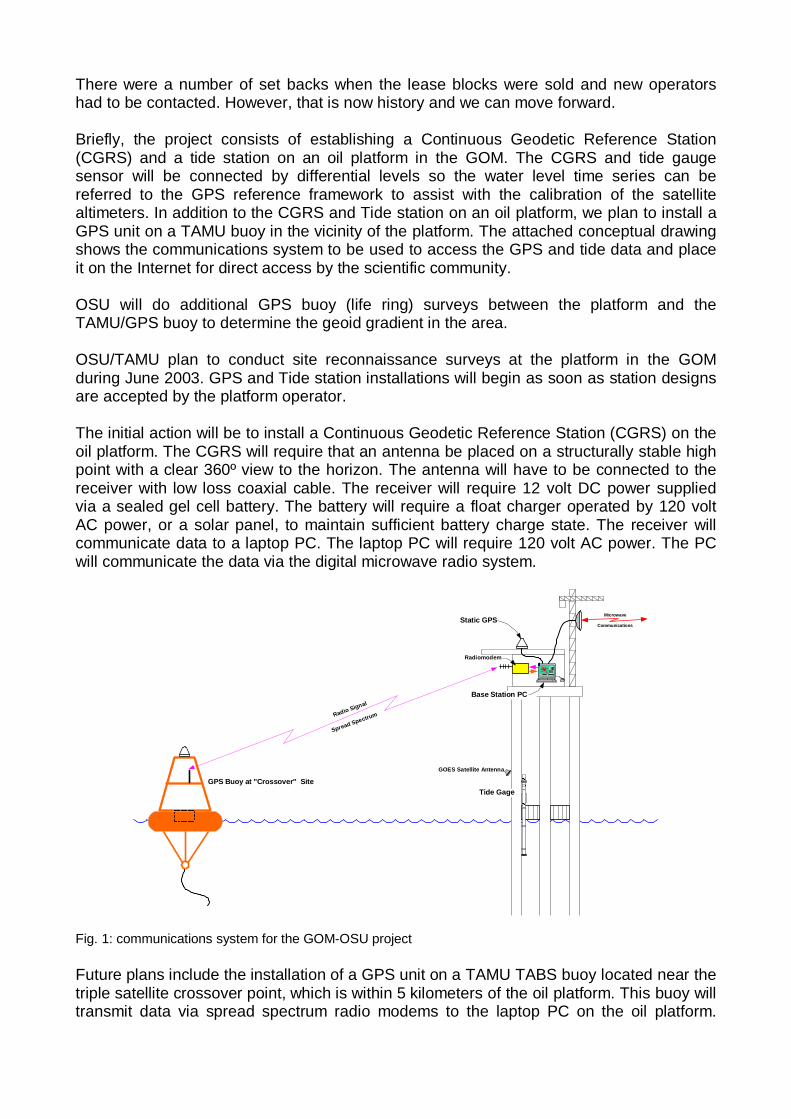
Briefly, the project consists of establishing a Continuous Geodetic Reference Station(CGRS) and a tide station on an oil platform in the GOM. The CGRS and tide gaugesensor will be connected by differential levels so the water level time series can bereferred to the GPS reference framework to assist with the calibration of the satellitealtimeters. In addition to the CGRS and Tide station on an oil platform, we plan to install aGPS unit on a TAMU buoy in the vicinity of the platform. The attached conceptual drawingshows the communications system to be used to access the GPS and tide data and placeit on the Internet for direct access by the scientific community.
OSU will do additional GPS buoy (life ring) surveys between the platform and theTAMU/GPS buoy to determine the geoid gradient in the area.
OSU/TAMU plan to conduct site reconnaissance surveys at the platform in the GOMduring June 2003. GPS and Tide station installations will begin as soon as station designsare accepted by the platform operator.
The initial action will be to install a Continuous Geodetic Reference Station (CGRS) on theoil platform. The CGRS will require that an antenna be placed on a structurally stable highpoint with a clear 360º view to the horizon. The antenna will have to be connected to thereceiver with low loss coaxial cable. The receiver will require 12 volt DC power suppliedvia a sealed gel cell battery. The battery will require a float charger operated by 120 voltAC power, or a solar panel, to maintain sufficient battery charge state. The receiver willcommunicate data to a laptop PC. The laptop PC will require 120 volt AC power. The PCwill communicate the data via the digital microwave radio system.
Radio Signal
Spread Spectrum
GPS Buoy at "Crossover" Site
Base Station PC
Static GPSMicrowave
Communications
Radiomodem
Tide Gage
GOES Satellite Antenna
Fig. 1: communications system for the GOM-OSU project
Future plans include the installation of a GPS unit on a TAMU TABS buoy located near thetriple satellite crossover point, which is within 5 kilometers of the oil platform. This buoy willtransmit data via spread spectrum radio modems to the laptop PC on the oil platform.
From that point the data will be stored and transmitted in the same manner as the CGRSon the oil platform.
Universität der Bundeswehr München, Institut für Erdmessung und Navigation(IfEN), Germany
For more information about the IfEN activities within the ESA funded project “ENVISATRadar Altimeter Calibration Using GPS in Buoys”, please refer to http://forschung.unibw-muenchen.de/ainfo.php?&id=529.
Universitat Poli tecnica de Catalunya UPC, Barcelona, Spain
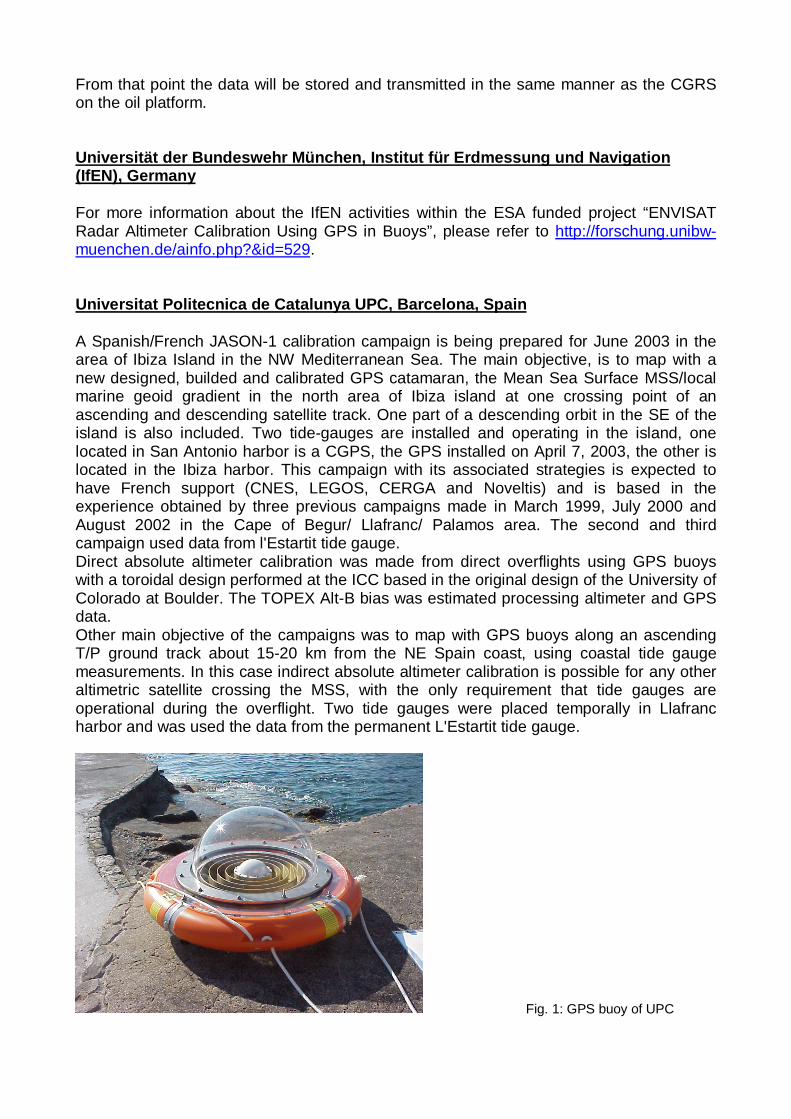
A Spanish/French JASON-1 calibration campaign is being prepared for June 2003 in thearea of Ibiza Island in the NW Mediterranean Sea. The main objective, is to map with anew designed, builded and calibrated GPS catamaran, the Mean Sea Surface MSS/localmarine geoid gradient in the north area of Ibiza island at one crossing point of anascending and descending satellite track. One part of a descending orbit in the SE of theisland is also included. Two tide-gauges are installed and operating in the island, onelocated in San Antonio harbor is a CGPS, the GPS installed on April 7, 2003, the other islocated in the Ibiza harbor. This campaign with its associated strategies is expected tohave French support (CNES, LEGOS, CERGA and Noveltis) and is based in theexperience obtained by three previous campaigns made in March 1999, July 2000 andAugust 2002 in the Cape of Begur/ Llafranc/ Palamos area. The second and thirdcampaign used data from l'Estartit tide gauge.Direct absolute altimeter calibration was made from direct overflights using GPS buoyswith a toroidal design performed at the ICC based in the original design of the University ofColorado at Boulder. The TOPEX Alt-B bias was estimated processing altimeter and GPSdata.Other main objective of the campaigns was to map with GPS buoys along an ascendingT/P ground track about 15-20 km from the NE Spain coast, using coastal tide gaugemeasurements. In this case indirect absolute altimeter calibration is possible for any otheraltimetric satellite crossing the MSS, with the only requirement that tide gauges areoperational during the overflight. Two tide gauges were placed temporally in Llafrancharbor and was used the data from the permanent L'Estartit tide gauge.
Fig. 1: GPS buoy of UPC
University of Tasmania (UTas), Centre for Spatial Information Science, Australia
A short summary of the activities of the UTas group:
(i) Our main activity was the work for Jason-1 and T/P RA calibration using GPS bouys. Apaper was recently submitted to Marine Geodesy special vol. on Jason-1 cal/val activities.
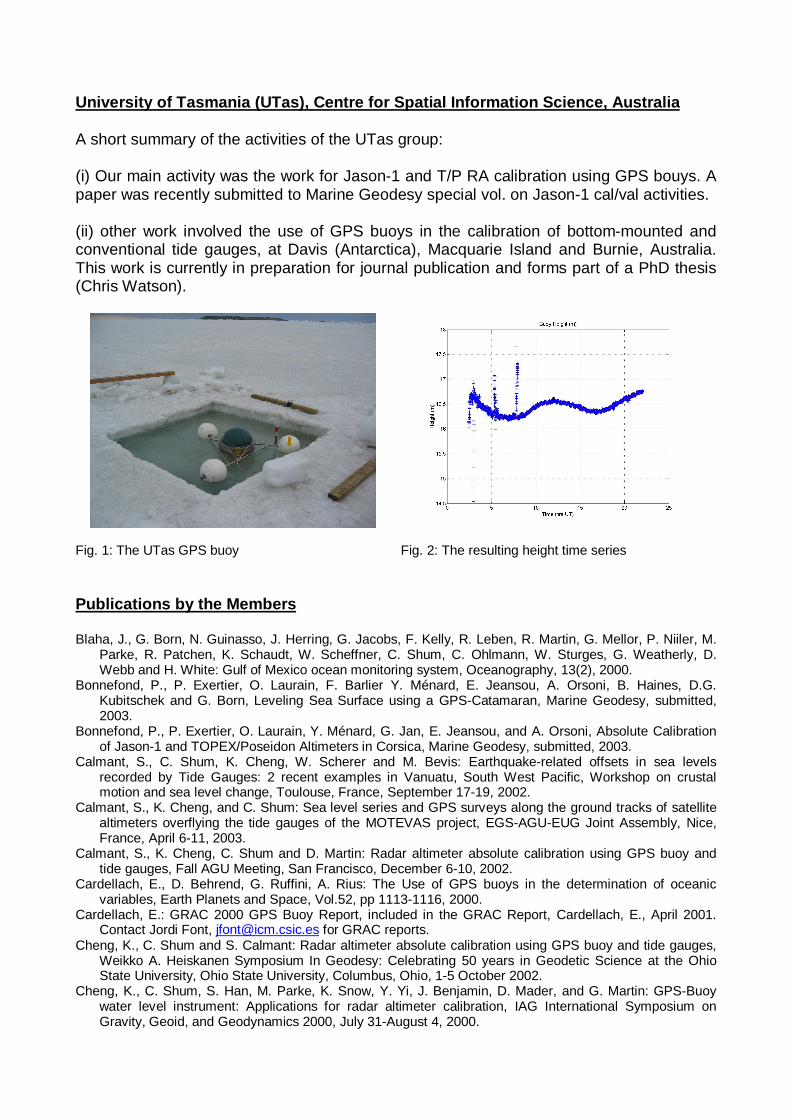
(ii) other work involved the use of GPS buoys in the calibration of bottom-mounted andconventional tide gauges, at Davis (Antarctica), Macquarie Island and Burnie, Australia.This work is currently in preparation for journal publication and forms part of a PhD thesis(Chris Watson).
•
Fig. 1: The UTas GPS buoy Fig. 2: The resulting height time series
Publications by the Members
Blaha, J., G. Born, N. Guinasso, J. Herring, G. Jacobs, F. Kelly, R. Leben, R. Martin, G. Mellor, P. Niiler, M.Parke, R. Patchen, K. Schaudt, W. Scheffner, C. Shum, C. Ohlmann, W. Sturges, G. Weatherly, D.Webb and H. White: Gulf of Mexico ocean monitoring system, Oceanography, 13(2), 2000.
Bonnefond, P., P. Exertier, O. Laurain, F. Barlier Y. Ménard, E. Jeansou, A. Orsoni, B. Haines, D.G.Kubitschek and G. Born, Leveling Sea Surface using a GPS-Catamaran, Marine Geodesy, submitted,2003.
Bonnefond, P., P. Exertier, O. Laurain, Y. Ménard, G. Jan, E. Jeansou, and A. Orsoni, Absolute Calibrationof Jason-1 and TOPEX/Poseidon Altimeters in Corsica, Marine Geodesy, submitted, 2003.
Calmant, S., C. Shum, K. Cheng, W. Scherer and M. Bevis: Earthquake-related offsets in sea levelsrecorded by Tide Gauges: 2 recent examples in Vanuatu, South West Pacific, Workshop on crustalmotion and sea level change, Toulouse, France, September 17-19, 2002.
Calmant, S., K. Cheng, and C. Shum: Sea level series and GPS surveys along the ground tracks of satellitealtimeters overflying the tide gauges of the MOTEVAS project, EGS-AGU-EUG Joint Assembly, Nice,France, April 6-11, 2003.
Calmant, S., K. Cheng, C. Shum and D. Martin: Radar altimeter absolute calibration using GPS buoy andtide gauges, Fall AGU Meeting, San Francisco, December 6-10, 2002.
Cardellach, E., D. Behrend, G. Ruffini, A. Rius: The Use of GPS buoys in the determination of oceanicvariables, Earth Planets and Space, Vol.52, pp 1113-1116, 2000.
Cardellach, E.: GRAC 2000 GPS Buoy Report, included in the GRAC Report, Cardellach, E., April 2001.Contact Jordi Font, [email protected] for GRAC reports.
Cheng, K., C. Shum and S. Calmant: Radar altimeter absolute calibration using GPS buoy and tide gauges,Weikko A. Heiskanen Symposium In Geodesy: Celebrating 50 years in Geodetic Science at the OhioState University, Ohio State University, Columbus, Ohio, 1-5 October 2002.
Cheng, K., C. Shum, S. Han, M. Parke, K. Snow, Y. Yi, J. Benjamin, D. Mader, and G. Martin: GPS-Buoywater level instrument: Applications for radar altimeter calibration, IAG International Symposium onGravity, Geoid, and Geodynamics 2000, July 31-August 4, 2000.
Cheng, K., C. Shum, S. Han, Y. Yi, and D. Martin: Application of GPS-buoy water level instrument for radaraltimeter calibration, IAG Symposium Series, 123, M. Sideris (eds), 367-372, Springer-Verlag BerlinHeidelberg, 2001.
Cheng, K., C. Shum, Y. Yi, S. Calmant and D. Martin: Radar altimeter absolute calibration using GPS waterlevel measurements, International Association of Geodesy 2001 Scientific Assembly in Budapest,Hungary, September, 2001.
Cheng, K., C. Shum, Y. Yi, S. Calmant, and D. Martin: Absolute radar altimeter calibration using GPS waterlevel measurements, APSG Sea Level Workshop/GLOSS GE7 Meeting, Univ. of Hawaii, Honolulu,Hawaii, April 23-27, 2001.
Cheng, K., S. Calmant and C. Shum: Absolute calibration of satellite radar altimeters in Lake Erie, andVanuatu, South Pacific, 27th General Assembly of the EGS in Nice, France, April 21-26, 2002.
Cheng, K.: Absolute calibration of radar altimeters using GPS water level measurements, Master Thesis,Ohio State University, March, 2001.
Huff, Lloyd C., Benjamin W. Remondi: GPS Expedition To Tangier Island, Proceedings of the ION 2000National Meeting; Navigating into the New Millennium, January 26-28, 2000, Anaheim, CA., pp. 323-332
IOC: Abstracts of Presentations at Workshops during the 7th Session of the IOC Group of Experts on theGlobal Sea Level Observing System (GLOSS), Honolulu, Hawaii, USA, 23-27 April 2001, 2002
Jekeli, C., and P. Dumrongchai: On monitoring vertical datums with satellite altimetry and tide gauge data onlarge lakes, International Association of Geodesy 2001 Scientific Assembly in Budapest, Hungary,September, 2001.
Jekeli, C., Heights, the Geopotential, and Vertical Datums, Technical Report, Department of Civil andEnvironmental Engineering and Geodetic Science, Ohio State University, November, 2000.
Kruizinga, G.L.H., B. Haines, J.J. Martinez-Benjamin, M. Martinez-Garcia, J. Talaya, M.A. Ortiz, B. Perez:"The CATALA experiment, preliminary results of ALT-B calibration using GPS buoys off the CatalonianCoast (Spain)", ALT-B Calibration Workshop, Goddard Space Flight Center, Greenbelt, Maryland, USA,1999.
Kuo, C., Y. Yi, K. Cheng, and C. Shum: Great Lakes monitoring using space geodetic technologies, WeikkoA. Heiskanen Symposium In Geodesy: Celebrating 50 years in Geodetic Science at the Ohio StateUniversity, Ohio State University, Columbus, Ohio, 1-5 October 2002.
Kuo, C.: Procedure to compute absolute lake level using Topex/Poseidon altimeter data, TechnicalMemorandum, Laboratory of Space Geodesy and Remote Sensing Research, The Ohio StateUniversity, July 27, 2000.
Liebsch, G., K. Novotny, R. Dietrich, and C. Shum: Comparison of multimission altimetric sea-surfaceheights with tide gauge observations in the Southern Baltic Sea, Marine Geodesy, 25, 213-234, 2002.
Liebsch, G., L. Eberlein and R. Dietrich: Realisation of a multisensoral observation system for thedetermination of offshore sea-level heights, Poster, EGS-AGU-EUG Joint Assembly, Nice, France, 06-11April 2003
Martinez-Benjamin, J., M. Martinez-Garcia, J. Garate, J. Martin-Davila, J. Ferrandiz, M. Vigo-Aguiar, M.Ortiz-Castellon, J. Talaya, B. Perez, G. Kruizinga, B. Haines, O. Colombo, B. Chao, C. Shum, M. Parke,S. Han, and K. Cheng: The T/P CATALA altimeter calibration campaign, Spring AGU Meeting,Washington D.C. May 30-June 3, 2000.
Martinez-Benjamin, J.J., M. Martinez-Garcia, G.L.H. Kruizinga, B. Haines, M. Ortiz, J. Talaya, J. Garate, J.Davila, J. Ferrandiz, M. Vigo-Aguiar, B. Perez, E. Alvarez: "The CATALA Experiment: AbsoluteCalibration of TOPEX Altimeter-B using GPS buoys in the NW-Mediterranena sea", POSTER, TheOcean Observing System for Climate, OCEANOBS 99, St Raphael, France, 1999.
Martinez-Benjamin, J.J., M. Martinez-Garcia, G.L.H. Kruizinga, B. Haines, M.A. Ortiz, J. Talaya, B. Perez, E.Alvarez, J. Garate, J.M. Davila, J.M. Ferrandiz, M.I. Vigo-Aguiar: "The CATALA campaigns: indirectcalibration technique for ENVISAT altimeter calibration", ERS-ENVISAT SYMPOSIUM, Gothenburg,Sweden, 2000.
Martinez-Benjamin, J.J., M. Martinez-Garcia, M. Ortiz, J. Talaya, J.Garate, J. Davila, J. Ferrandiz, M. Vigo-Aguiar, B. Perez, E. Alvarez: "The TOPEX/POSEIDON and JASON-1 Calibration Campaigns in theCape of Begur and Ibiza Island Regions", POSTER, TOPEX/POSEIDON/Jason-1 Science WorkingTeam Meeting, Miami, USA, 2000.
Martinez-Benjamin, J.J., M. Martinez-Garcia, M.A. Ortiz, J. Talaya, G.L.H. Kruizinga, B. Haines, J. Garate,M. Davila, JM. Ferrandiz, M.I. Vigo-Aguiar, B. Perez, E. Alvarez, O. Colombo, B. Chao, CK. Shum: "TheTOPEX/POSEIDON CATALA Altimeter Calibration Campaign", POSTER, American Geophysical Union,AGU-2000 Spring meeting, Washington, USA, 2000.
Martinez-Benjamin,J.J., M. Martinez-Garcia, M.A. Ortiz: "Validation of TOPEX/POSEIDON GDR byindependent techniques", POSTER, XXVI General Assembly of the European Geophysical Society(EGS), Nice, France, 2001.
Martinez-Garcia, M., G.L.H. Kruizinga, B. Haines, J.J. Martinez-Benjamin, M.A. Ortiz, J. Talaya, J. Garate,M. Davila: "PRELIMINARY RESULTS OF THE GPS BUOYS DATA PROCESSING IN THE NORTH
WESTERN MEDITERRANEAN SEA", POSTER, International Union of Geodesy and Geophysiscs,IUGG, 18-30 July 1999, Birmingham.
Martinez-Garcia, M., J.J. Martinez-Benjamin, M.A. Ortiz: "Analysis and Strategies applied to the GPS buoysdata for the TOPEX ALT-B Absolute Calibration in the NW-Mediterranean", POSTER,TOPEX/POSEIDON/Jason-1 Science Working Team Meeting, Miami, USA, 2000.
Martinez-Garcia, M., J.J. Martinez-Benjamin, M.A. Ortiz: "Strategies with GPS for the navigation of buoys",POSTER, GNSS-2001, Sevilla, Spain, 2001.
Moore, T., Close, G., Lee, C., Moore, R.: RiGHt on the Water: River Monitoring Using GPS Heighting,galileo's World, Autumn 2000, pp. 22-27
Moore, T., Close, G., Moore, R.: RiGHt: River Level Monitoring using GPS Heighting, Proc ION GPS 2000,13th International Technical Meeting of the Sattelite Division of the Institute of Navigation, 8 pages, SaltLake City, USA, September 2000.
Moore, T., Zhang, K., Close, G., Moore, R.: Real Time River Level Monitoring using GPS Heighting, GPSSolutions, Vol 4, No 2, ISSN 1080-5370, pp 63 - 67, Fall 2000.
Ortiz, M.A., M. Martinez-Garcia, J.J. Martinez-Benjamin: "GPS buoys for altimeter calibration campaigns",POSTER, GNSS-2001, Sevilla, Spain, 2001.
Schöne, T., A. Braun, C. Reiber, M. Rentsch, and C. Shum: Concept for using GPS-Buoys for RA driftmonitoring, ERS-ENVISAT Symposium, Gothenbury, Sweden, 2000.
Schöne, T., A. Braun, C. Reigber: Altimetrie und Meeresspiegel - Möglichkeiten und Grenzen derBeobachtung, Zürich, GAIA 10 (2001) 3, 226-229
Schöne, T., A. Braun, Chr. Reigber: Kontinuierliche Überwachung von Pegelstationen und GPSHochseebojen, Deutscher Hydrographentag 2001, Potsdam, 2001
Schöne, T., M. Forberg, R. Galas, C. Reigber: GPS-buoys for lifetime RA drift monitoring, AGU Fall Meeting2002, EOS Trans. AGU, 83(47), Fall Meet. Suppl., Abstract OS52A-0189, 2002
Schueler, T., Zimmermann, B., B. Riedl, G. W. Hein: Radar Altimeter Calibration of the Envisat Satellite: AnAutonomous System of High-Precision for Instantaneous Sea Surface Height DeterminationProceedings of NTM 2003 – National Technical Meeting, 22-24 January 2003, Anaheim, CA, USA, inpress
Shannon, B., D.M. Martin: KINEMATIC GPS OBSERVATIONS TO ESTABLISH A MEAN LOWER LOWWATER DREDGING DATUM DIRECTLY IN A NAVIGATION CHANNEL, http://op.gfz-potsdam.de/altimetry/SSG_buoys/
Shum, C. K., C. Jekeli, C. Y. Kuo, and Y. Yi: Monitoring lake level changes using satellite altimetry and GPS-buoys, National Sea Grant College Program a Program Assessment Team (PAT) visit, Ohio State
Shum, C., C. Kuo, Y. Yi and C. Zhao: Long-term global sea level change observed by altimetry and tidegauges, International Association of Geodesy 2001 Scientific Assembly in Budapest, Hungary,September, 2001.
Shum, C., D. Brzezinska, B. Hazelton, J. Kwon and C. Zhao: The Ohio State University IGS LEO GPS PilotProject and Associate Analysis Center, IGS LEO Pilot Project Meeting, GFZ, Potsdam, Germany,February 6-8, 2001.
Shum, C., D. Brzezinska, S. Ge, B. Hazelton, Y. Yi, C. Zhao, M. Bevis, K. Hocke, J. Wickert, G. Jeffress, D.Martin, and M. Szabados: The use of GPS for measuring water vapor and sea level, Fifth Symposium onIntegrated Observing Systems, Albuquerque, New Mexico January 15-19, 2001.
Shum, C., K. Cheng, and J. Reutter: Great Lakes monitoring using space geodetic technologies, invitedlecture, GLERL Advanced Technology Seminar, Ann Arbor, Michigan, July 9, 2002.
Snay, R., M. Chin, D. Coner, T. Soler, C. Zervas, J. Oyler, M. Craymer, S. Gutman, C. Shum , K. Cheng, andC. Kuo: Great Lakes continuous GPS (CGPS) network for geodynamics, meteorology and safenavigation, Weikko A. Heiskanen Symposium In Geodesy: Celebrating 50 years in Geodetic Science atthe Ohio State University, Ohio State University, Columbus, Ohio, 1-5 October 2002.
Torrobella, Josep & The Grac-II Team: Light GPS Buoys used in the Calibration of ENVISAT ALTIMETER.,Poster presentation, EGS03, Nice, April 2003.
Torrobella, Josep: GRAC-II - Preliminary results of 27-MAY-2002 experiment # 12. IEEC-CSIC ResearchUnit. May 2002. Contact Josep Torrobella, [email protected] for GRAC-II reports.
Tseng, H., C. Shum, C. Zhao, and J. Lin: Absolute sea level measurements from tide gauges and adjacentgeodetic station vertical motion solutions, 25th General Assembly of the EGS in Nice, France, April 24-29, 2000.
Watson, C., R. Coleman, N. White, J. Church, R. Govind: Absolute Calibration of TOPEX/Poseidon andJASON-1 using GPS Buoys in Bass Strait, Australia, submitted to Marine Geodesy, Special Volume,2003
Watson, C.: 'A Contribution to Absolute Sea Level in Tasmania', Thesis for Bachelor of Surveying withHonours, Centre for Spaital Information Science (CenSIS), University of Tasmania, Hobart, p. 197., 1999
Yi, Y., A. Braun, C. Shum, K. Cheng and S. Calment: Envisat RA2 cal/val results, Envisat RA-2/MWR CCVTSixth Plenary Meeting, ESA/ESRIN, Frascati, Italy, March 25-27, 2003.
Yi, Y., A. Braun, K. Cheng, C. Shum, and S. Calmant: Initial ENVISAT RA-2 Cal/Val results, ENVISAT RA-MWR CCVT Fourth Plenary Meeting, ESA/ESRIN, Frascati, Italy, 3-4 December 2002.
Yi, Y., C. Kuo, C. Shum and C. Jekeli: Long-term Great Lakes water level changes observed by tide gaugesand altimetry, International Association of Geodesy 2001 Scientific Assembly in Budapest, Hungary,September, 2001.
Yi, Y., K. Cheng, C. Shum, A. Braun, and S. Calmant: ENVISAT RA-2 calibration/validation, Proc. EGS-AGU-EUG Joint Assembly, Nice, France, April 6-11, 2003.
Zhao. C., C. Shum, Y. Yi, P. Luk, J. Finkelstein, J. Lillibridge, J. McMillan, and M. Rau: GFO radar altimeterdata product verifications and ocean circulation studies, IAG Scientific Assembly, Vistas for Geodesy inthe New Millennium, Budapest, Hungary, September 2-7, 2001.
Zimmermann, B., T. Schueler, B. Riedl, G. W. Hein, R. J. Biberger: Radar Altimeter Calibration of theENVISAT Satellite Using an Autonomous GPS-based System of Moored Buoys for Instantaneous SeaSurface Height Determination GNSS 2003 – Euro0pean Navigation Conference, 22-25 April 2003, Graz,Austria