planning in the real world time and resources hierarchical task network conditional planning...
TRANSCRIPT
Planning in the Real World
• Time and Resources• Hierarchical Task Network• Conditional Planning• Execution Monitoring and Replanning• Continuous Planning• MultiAgent Planning• Summary
Time Constraints
Planning gets complicated in:
• Scheduling Hubble Space Telescope• Operating Factories• Manufacturing• Cooperating Agents
Time Constraints
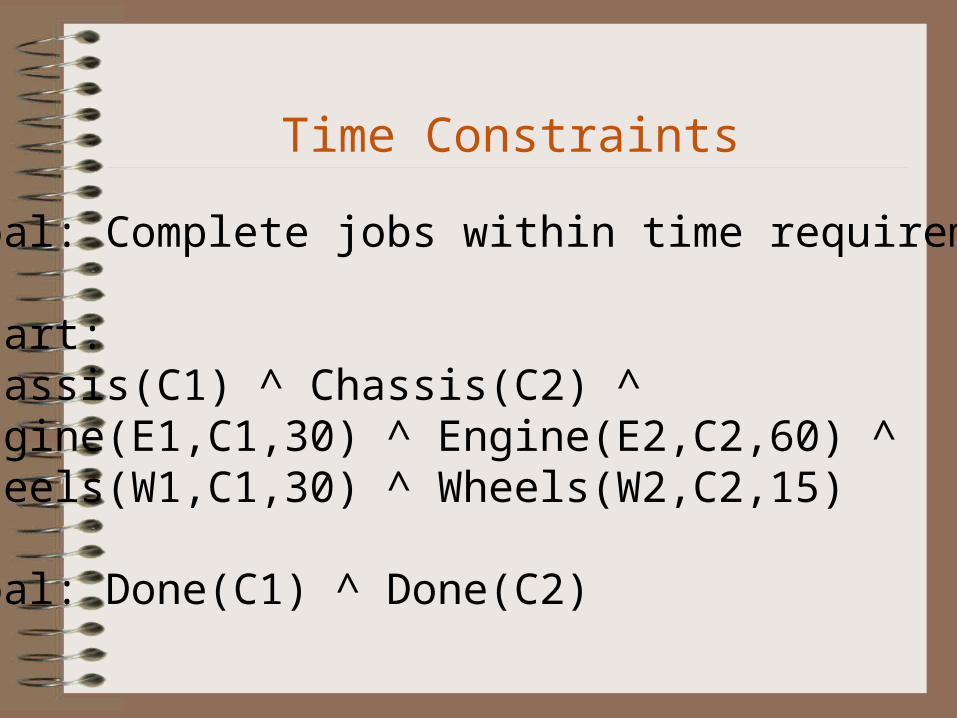
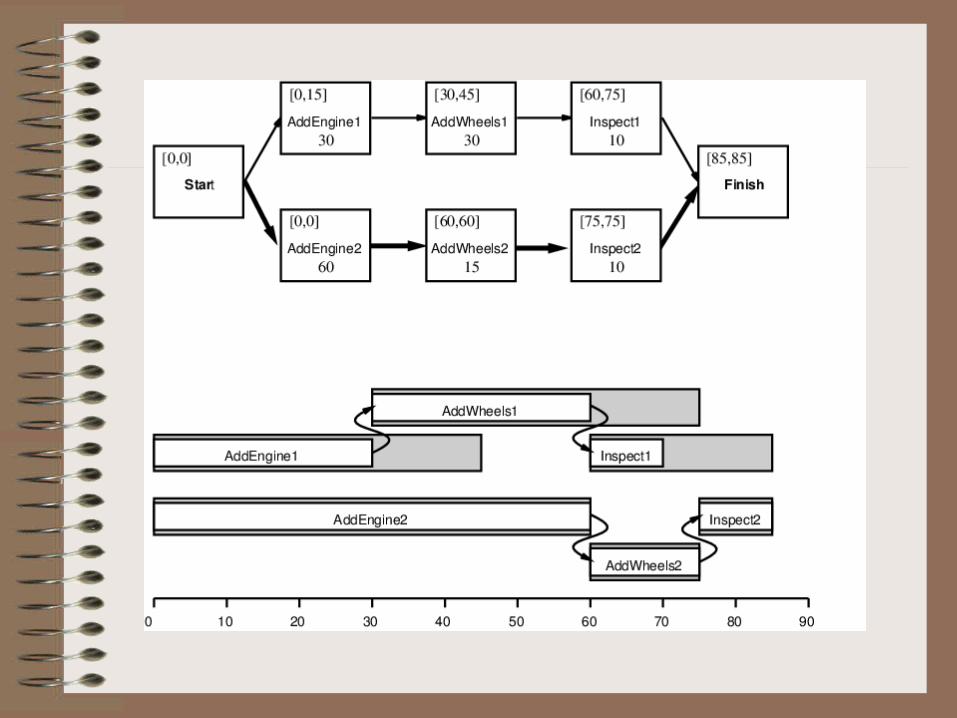
Goal: Complete jobs within time requirement.
Start:Chassis(C1) ^ Chassis(C2) ^Engine(E1,C1,30) ^ Engine(E2,C2,60) ^Wheels(W1,C1,30) ^ Wheels(W2,C2,15)
Goal: Done(C1) ^ Done(C2)
Time Constraints
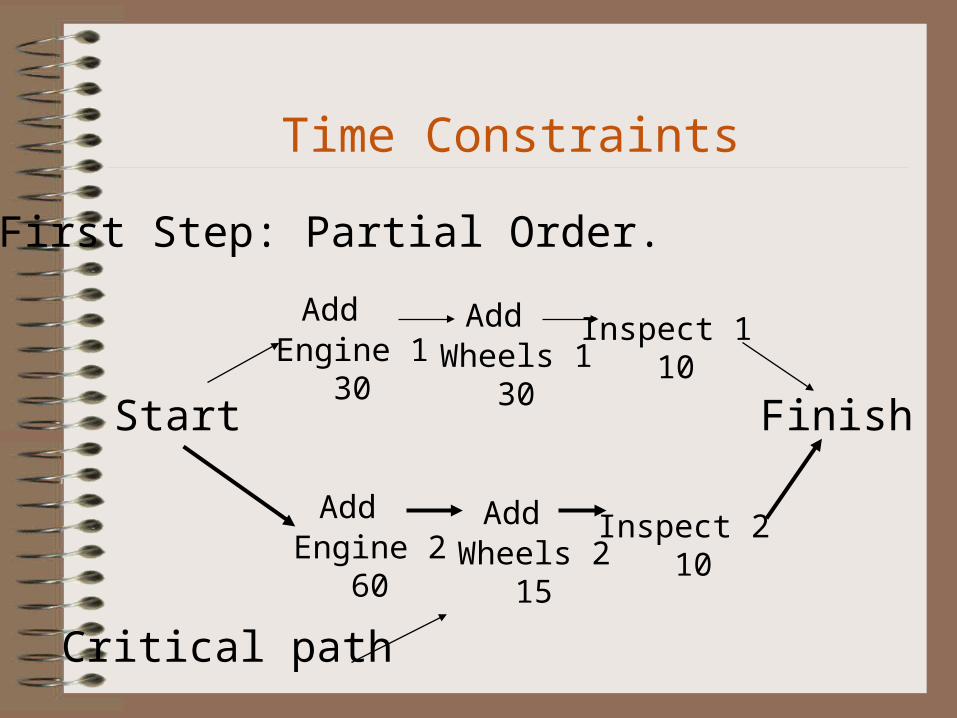
First Step: Partial Order.
Start
AddEngine 1 30
AddWheels 1 30
Inspect 1 10
Finish
AddEngine 2 60
AddWheels 2 15
Inspect 2 10
Critical path
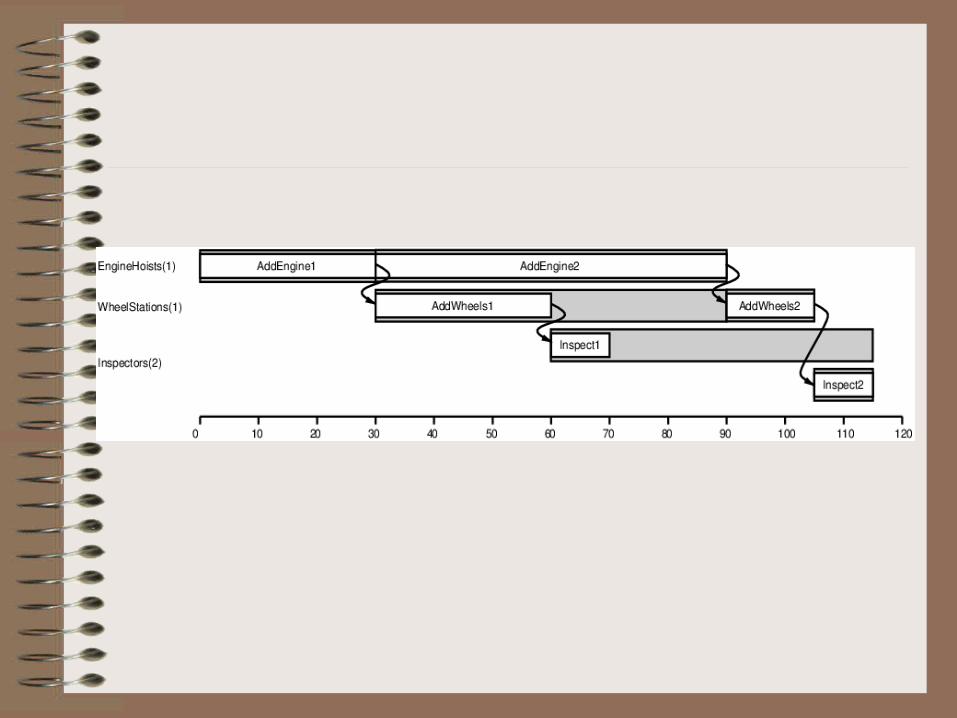
Resource Constraints
Resource(k): k units of resource are needed by the action.
The resource is reduced by k during the duration of the action.
Resource Constraints
Example:
Action(AddEngine(e,c,d)Precond: …
Effect: … Resource: EngineHoists(1))
Other examples: Inspectors(2)
Planning in the Real World
• Time and Resources• Hierarchical Task Network• Conditional Planning• Execution Monitoring and Replanning• Continuous Planning• MultiAgent Planning• Summary
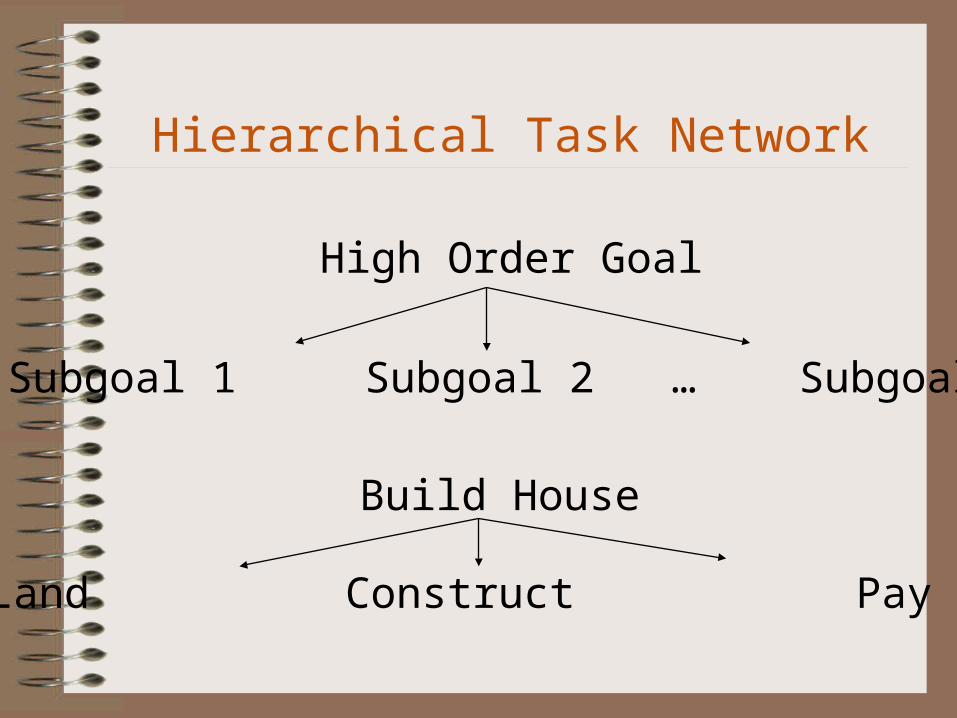
Hierarchical Task Network
High Order Goal
Subgoal 1 Subgoal 2 … Subgoal n
Build House
Get Land Construct Pay Builder
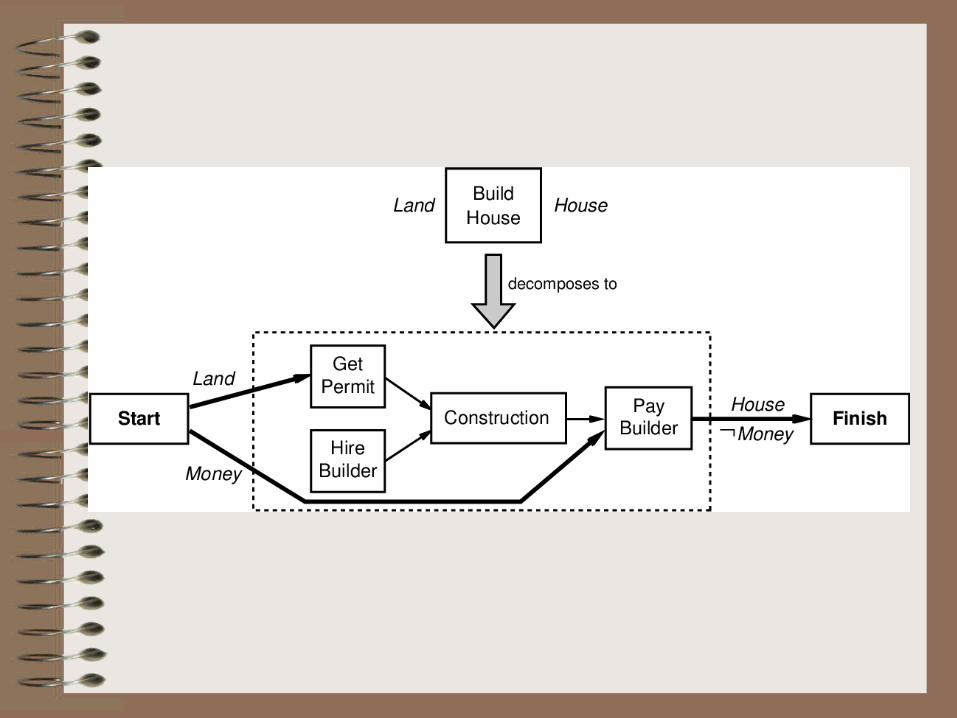
Decomposition
• A decomposition should be a correct implementation of the action (plan should be complete and consistent).• A subplan is attained by unifying its variables with the state of the environment.
Hierarchical Task Network HTN is complicated (undecidable). Recursion is a problem. Allows subtask sharing. It is in general more efficient than naïve planning (linear rather than exponential).
A Successful Story
Successful story: O-Plan (Bell and Tate ‘85) It helps develop production plans for Hitachi (350 products, 35 assembly machines, 2000 operations).
It generates a schedule for 30 days with 8-hrshifts. The plan has tens of millions of steps.
Planning in the Real World
• Time and Resources• Hierarchical Task Network• Conditional Planning• Execution Monitoring and Replanning• Continuous Planning• MultiAgent Planning• Summary
Conditional Planning
What to do with incomplete and incorrectinformation?
Assume “bounded indeterminacy”
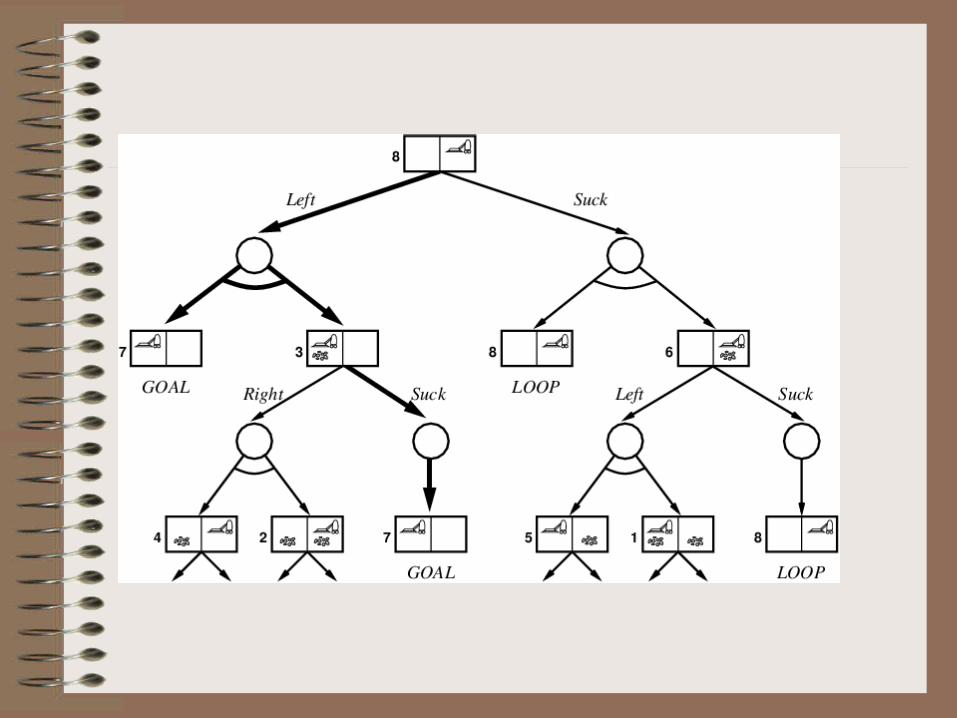
Solution: Construct a conditional plan with branches to consider all sorts of contingencies (include sensing actions)
Actions
Actions can have disjunctive effects:
Example: Vaccum CleanerAction(Left, Precond: At Right Effect: At Left V AtRight)
Effects
Also add conditional effects:
Example: Vaccum CleanerAction(Suck, Precond: Effect: When (At Left) CleanL When (AtRight) CleanR)
Example
Vacuum cleaner: Sometimes deposits dirt when it moves to a clean destination square. Sometimes deposits dirt if suck is applied to a clean square.
Planning in the Real World
• Time and Resources• Hierarchical Task Network• Conditional Planning• Execution Monitoring and Replanning• Continuous Planning• MultiAgent Planning• Summary
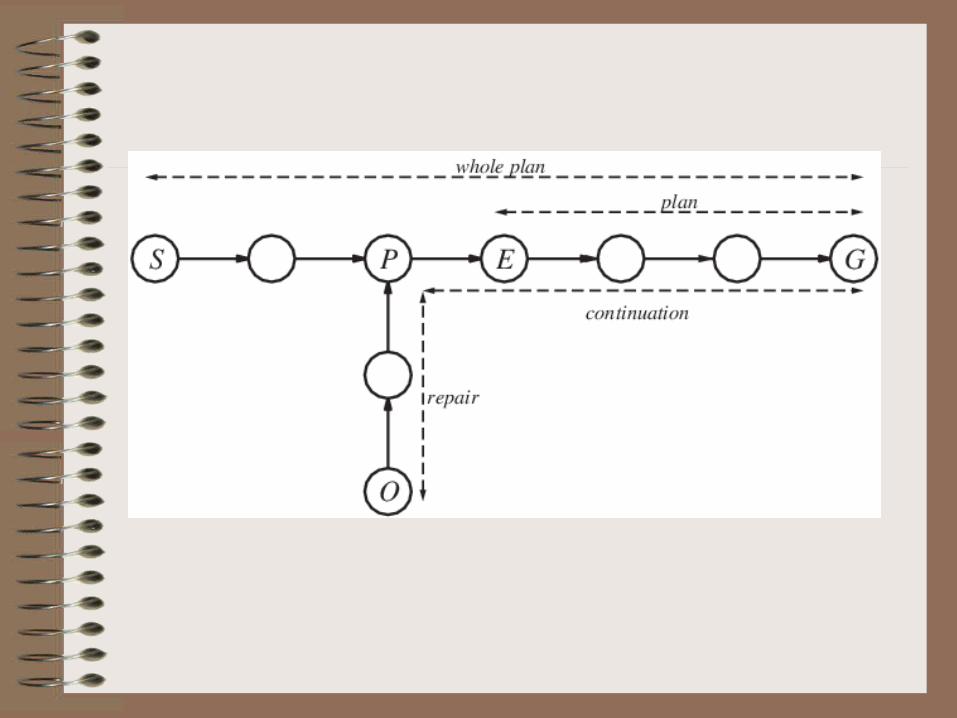
Execution Monitoring
Check to see if all is going according to the plan.
Re-planning agents repair old plans if something goes wrong.
Uses action monitoring to repair and continue with the plan.
Planning in the Real World
• Time and Resources• Hierarchical Task Network• Conditional Planning• Execution Monitoring and Replanning• Continuous Planning• MultiAgent Planning• Summary
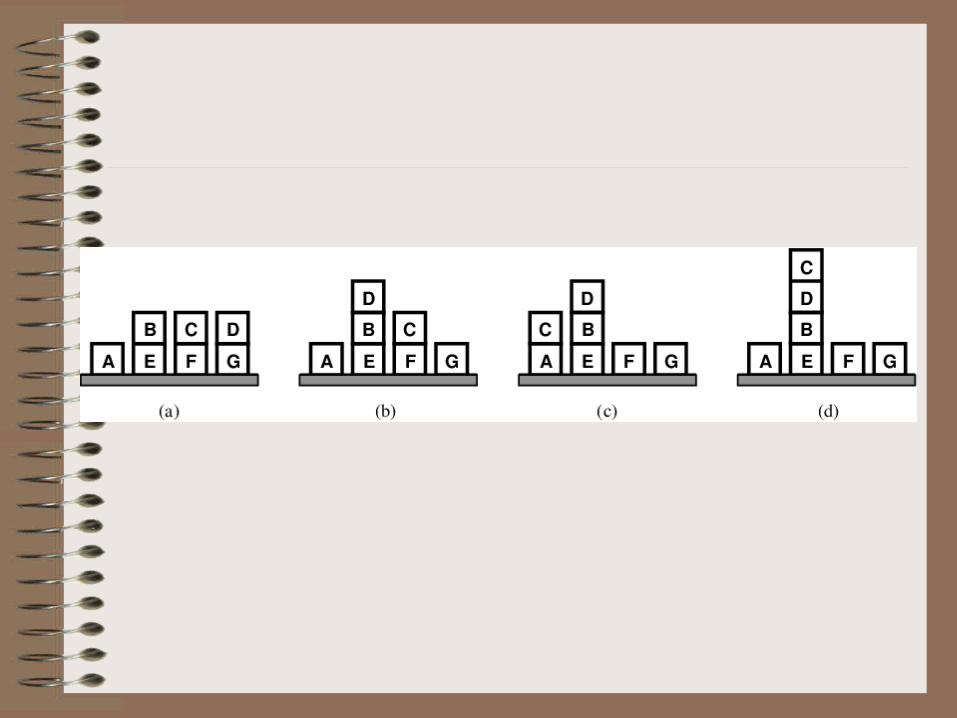
Continuous Planning
o The agent persists in the environment indefinitely. o The agent is part of the way through executing a plan.
Example:Blocks-world problem.
Planning in the Real World
• Time and Resources• Hierarchical Task Network• Conditional Planning• Execution Monitoring and Replanning• Continuous Planning• MultiAgent Planning• Summary
MultiAgent Planning
Interaction can be
• Cooperative Joint plan A goal is achieved when each agent performs its assigned actions.
• Competitive
Cooperative
Play Tennis (doubles)
Plan 1: A: [Go(A, [Right,Baseline]), Hit(A,Ball)] B: [NoOp(B), NoOp(B)]
Cooperative
A common solution is to have a convention (constraint on joint plan).Conventions arise in evolutionary processes. Example:
• An ant colony. • Flocking behavior of birds
Besides convention you may have communication.
Planning in the Real World
• Time and Resources• Hierarchical Task Network• Conditional Planning• Execution Monitoring and Re-planning• Continuous Planning• Multi-agent Planning• Summary
Summary Actions need resources (time being an important one) Planning can be divided in a hierarchy of subtasks Conditional plans help under uncertainty Execution Monitoring detects violations Replanning tries to repair plans Continuous planning creates new goals Multiagent planning is needed when different agents interact.