pcd kelas a hijra hidayatullah
TRANSCRIPT
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 1/45
1
Pengolahan Citra Digital
Disusn Oleh :
HIJRA HIDAYATULLAH
H111 12 006
PROGRAM STUDI MATEMATIKA
FAKULTAS MATEMATIKA DAN ILMU PENGETAHUAN ALAM
UNIVERSITAS HASANUDDIN
2016
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 2/45
2
KATA PENGANTAR
Puji Syukur kehadirat Allah SWT. Yang telah melimpahkan karunia dan rahmat-
Nya sehingga laporan “Pemrosesan Citra Digital” dapat terselesaikan.
Penyusunan tugas lengkap ini dibuat untuk memenuhi tugas yang diberikan pada
mata kuliah Pemrosesan Citra Digital. Dalam tahap penyusunan laporan ini, tidak
terlepas dari berbagai kendala yang menghambat penyusunan. Namun berkat bantuan dan
motivasi dari berbagai pihak sehingga kendala dan halangan tersebut dapat teratasi.
Ucapan terima kasih penulis sampaikan kepada dosen mata kuliah Pemrosesan
Citra Digital, yang telah membimbing dan mengarahkan dalam proses menyelesaikan
tugas ini, orang tua, dan teman-teman serta pihak lain yang mendukung proses
penyelesaian tugas ini.
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 3/45
3
DAFTAR ISI
SAMPUL i
KATA PENGANTAR ii
DAFTAR ISI ii
BAB I IMAGE RESTORATION 1
I.1 A Model of the Image Degradation/Restoration Process 1I.2 Model Noise 3
I.2.1 Penambahan noise dengan fungsi imnoise 4
I.2.2 Membangkitkan Spatial Random Noise Dengan Distribusi Khusus 5
I.2.3 Periodic Noise 8
I.2.4 Estimasi Parameter Noise 9
I.3 Restoration in the Presence of Noise Only-Spatial Filtering 10
I.3.1 Spatial Noise Filter 10
I.3.2 Adaptive Spatial Filters 17
I.4 Periodic Noise Reduction by Frequency Domain Filtering 18
I.5 Pemodelan dari fungsi degradasi 24
I.6 Constrained Least Squares (Regularized) Filtering 27
I.7 Iterative Nonlinear Restoration Using the Lucy-Richardson
(L-R) Algorithm 28
I.8 Geometric Transformation and Image Registration 30
I.8.1 Geometric Spatial Transformation 33
I.8.2 Applying Spatial Transformation to Image 34
I.8.3 Image Registration 35
BAB II COLOR IMAGE PROCESSING 36
II.1 Representasi warna image pada matlab 36
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 4/45
4
II.2 The basics of color image, m2 US38
DAFTAR PUSTAKA M2
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 5/45
5
BAB I
IMAGE RESTORATION
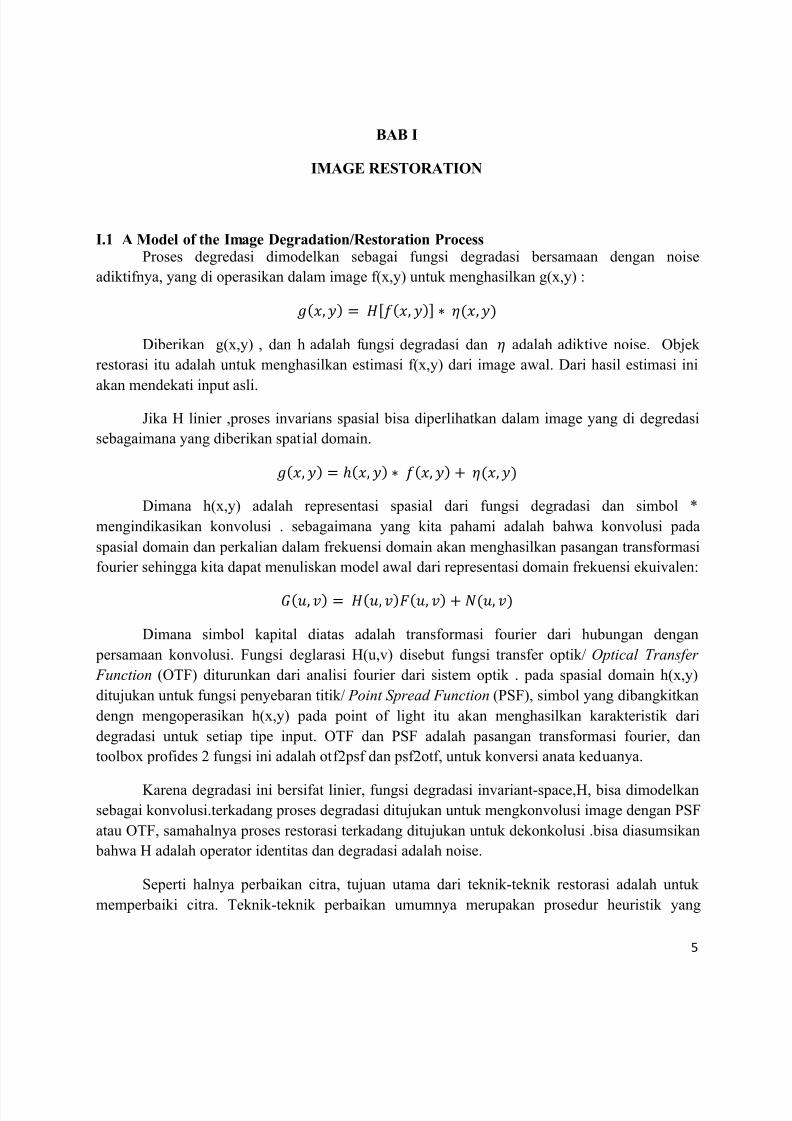
I.1 A Model of the Image Degradation/Restoration ProcessProses degredasi dimodelkan sebagai fungsi degradasi bersamaan dengan noise
adiktifnya, yang di operasikan dalam image f(x,y) untuk menghasilkan g(x,y) :
, = , ∗ (,)
Diberikan g(x,y) , dan h adalah fungsi degradasi dan adalah adiktive noise. Objek
restorasi itu adalah untuk menghasilkan estimasi f(x,y) dari image awal. Dari hasil estimasi ini
akan mendekati input asli.
Jika H linier ,proses invarians spasial bisa diperlihatkan dalam image yang di degredasi
sebagaimana yang diberikan spatial domain.
, = , ∗ , + (,)
Dimana h(x,y) adalah representasi spasial dari fungsi degradasi dan simbol *
mengindikasikan konvolusi . sebagaimana yang kita pahami adalah bahwa konvolusi pada
spasial domain dan perkalian dalam frekuensi domain akan menghasilkan pasangan transformasi
fourier sehingga kita dapat menuliskan model awal dari representasi domain frekuensi ekuivalen:
, = ,, + (, )
Dimana simbol kapital diatas adalah transformasi fourier dari hubungan dengan
persamaan konvolusi. Fungsi deglarasi H(u,v) disebut fungsi transfer optik/ Optical Transfer
Function (OTF) diturunkan dari analisi fourier dari sistem optik . pada spasial domain h(x,y)
ditujukan untuk fungsi penyebaran titik/ Point Spread Function (PSF), simbol yang dibangkitkan
dengn mengoperasikan h(x,y) pada point of light itu akan menghasilkan karakteristik dari
degradasi untuk setiap tipe input. OTF dan PSF adalah pasangan transformasi fourier, dan
toolbox profides 2 fungsi ini adalah otf2psf dan psf2otf, untuk konversi anata keduanya.
Karena degradasi ini bersifat linier, fungsi degradasi invariant-space,H, bisa dimodelkan
sebagai konvolusi.terkadang proses degradasi ditujukan untuk mengkonvolusi image dengan PSF
atau OTF, samahalnya proses restorasi terkadang ditujukan untuk dekonkolusi .bisa diasumsikan
bahwa H adalah operator identitas dan degradasi adalah noise.
Seperti halnya perbaikan citra, tujuan utama dari teknik-teknik restorasi adalah untuk
memperbaiki citra. Teknik-teknik perbaikan umumnya merupakan prosedur heuristik yang
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 6/45
6
dirancang untuk memanipulasi citra dengan memanfaatkan aspek “psychophysical” dari sistem
visual manusia. Misalnya : contrast stretching. Restorasi berusaha untuk merekonstruksi atau
mengembalikan citra yang telah terdegradasi dengan memanfaatkan pengetahuan tentang
fenomena degradasi. Jadi, teknik-teknik restorasi diarahkan untuk memodelkan degradasi dan
menerapkan proses kebalikan dari model degradasi untuk mendapatkan kembali citra asal.
Misalnya : deblurring
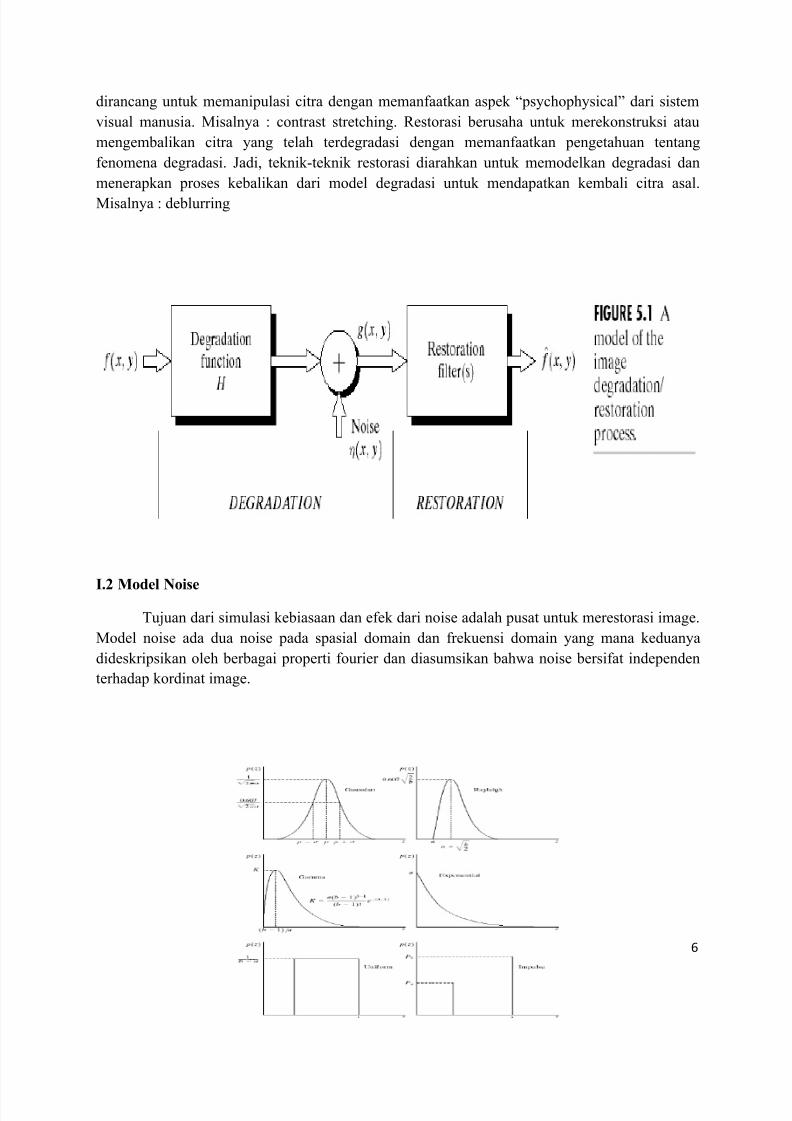
I.2 Model Noise
Tujuan dari simulasi kebiasaan dan efek dari noise adalah pusat untuk merestorasi image.
Model noise ada dua noise pada spasial domain dan frekuensi domain yang mana keduanya
dideskripsikan oleh berbagai properti fourier dan diasumsikan bahwa noise bersifat independen
terhadap kordinat image.

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 7/45
7
I.2.1 Penambahan noise dengan fungsi imnoise
Penggunaan toolbox fungsi imnoise adalah untuk mengambil gambar dengan noise. syntax dasar
dari fungsi ini adalh
= ( , ,)
Dimana f adalah input image. Fungsi imnoise mengkonfersi input image kedalam double class
pada range [0,1] sebelum ditambahkan noise. hal ini akan diambil kedalam perhitungan ketika
kita melakukan spesifikasi parameter noise, sebagai contoh untuk menambahkan noise gaussian
dari mean 64 dan varians 400 kedalam image uint8, kita memberi skala 64/255 dan variansi 400
untuk input kedalam imnoise. Syntax untuk fungsi ini adalah :
g = imnoise(f, „gaussian‟, m, var) gaussian nois ditambahkan pada mean m, dan varians
var untuk gambar f. hasil no, berarti noise dengan 0,01 varians
g = imnoise(f, „localvar‟, V) menambahkan zero-mean. Naoise gaussian dari varians
local, V, untuk image f, dimana V adalah array dari ukuran yang sama sebagaimana
pengisian f untuk nilai varian yang diinginka pada setiap titik.
g = imnoise (f, „localvar‟, image_intensity,var) menambahkan zero-mean, noise Gaussian
untuk image f, dimana lokal varians pada noise,var, adalah sebuah fungsi pada nilai
intensity image pada f. image_intensity dan argumen var adalah vektor dari ukuran yang
sama, plot(image_intensity) adalah plot dari fungsi relasi antara fungsi varians noise.
vektor image_intestiy harus berisi nilai intensitas normalisasi pada range [0,1] g = imnoise(f, „salt&papper‟, d)
g = imnoise(f, „poisson‟)
untuk contoh penggunaan printah imnoise terdapat pada source berikut yang hanya mewakili
salah satu noise model (dipilih noise model gaussian).
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 8/45
8
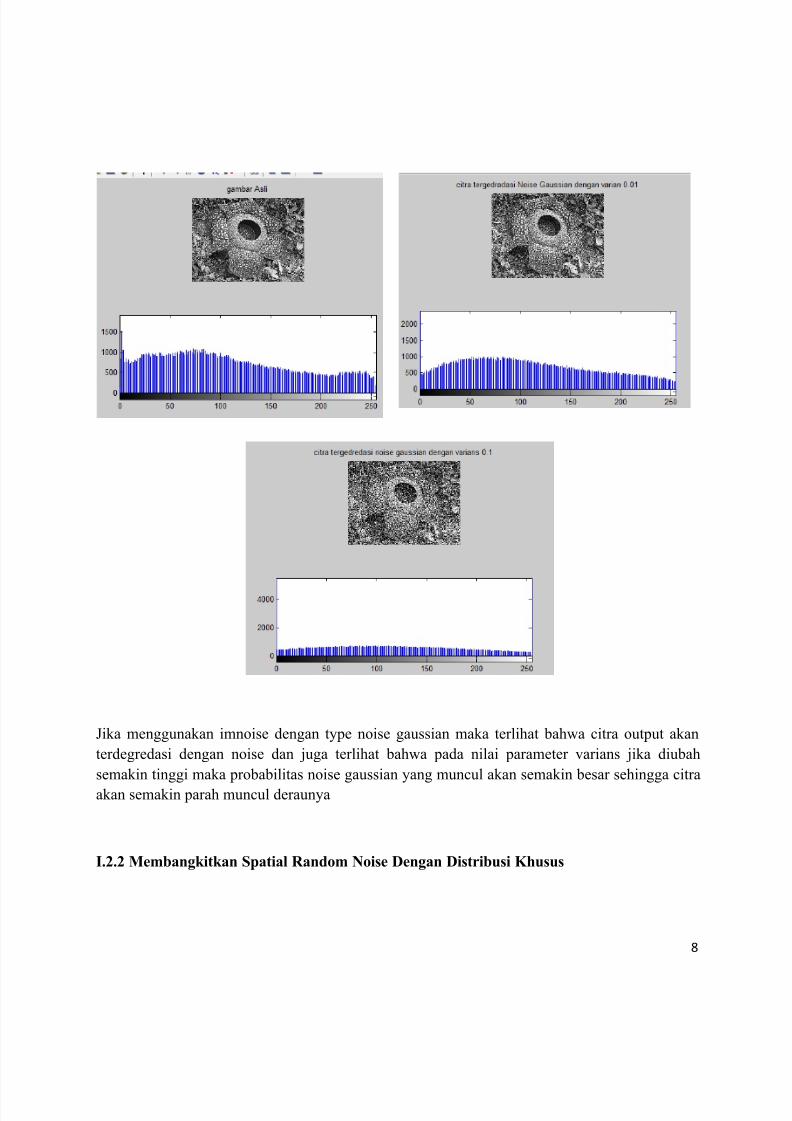
Jika menggunakan imnoise dengan type noise gaussian maka terlihat bahwa citra output akan
terdegredasi dengan noise dan juga terlihat bahwa pada nilai parameter varians jika diubah
semakin tinggi maka probabilitas noise gaussian yang muncul akan semakin besar sehingga citra
akan semakin parah muncul deraunya
I.2.2 Membangkitkan Spatial Random Noise Dengan Distribusi Khusus
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 9/45
9
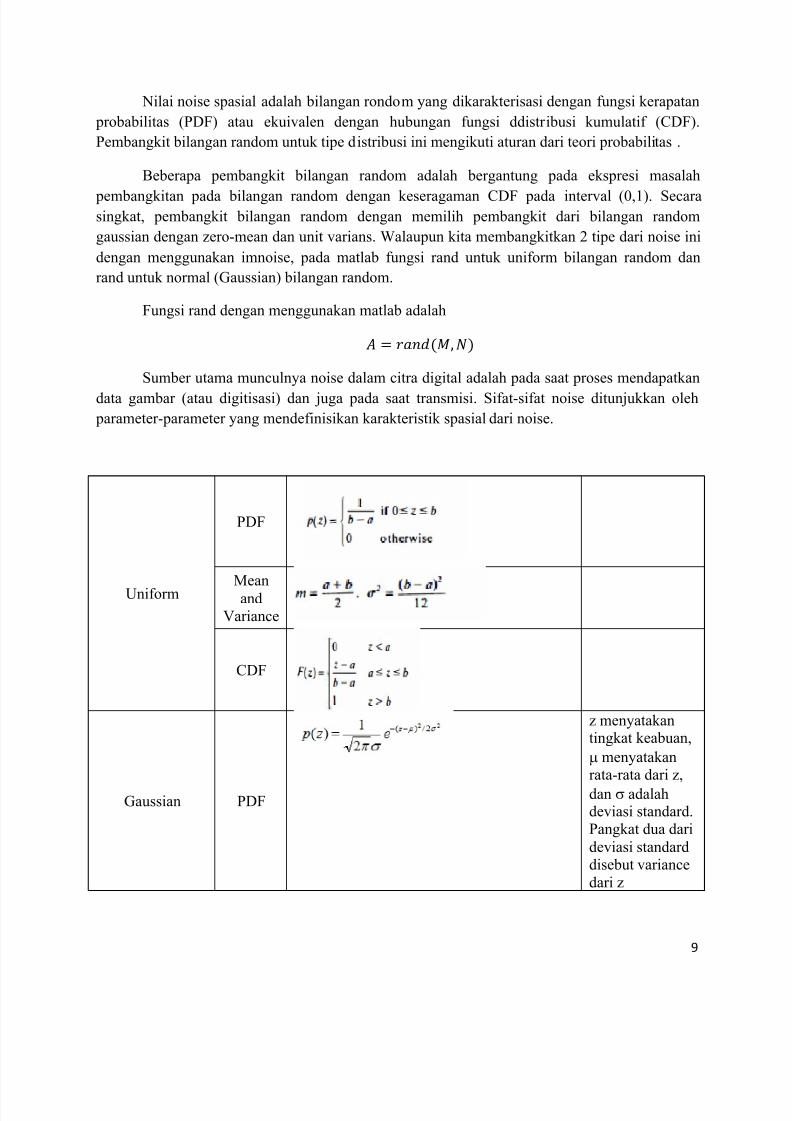
Nilai noise spasial adalah bilangan rondom yang dikarakterisasi dengan fungsi kerapatan
probabilitas (PDF) atau ekuivalen dengan hubungan fungsi ddistribusi kumulatif (CDF).
Pembangkit bilangan random untuk tipe distribusi ini mengikuti aturan dari teori probabilitas .
Beberapa pembangkit bilangan random adalah bergantung pada ekspresi masalah
pembangkitan pada bilangan random dengan keseragaman CDF pada interval (0,1). Secarasingkat, pembangkit bilangan random dengan memilih pembangkit dari bilangan random
gaussian dengan zero-mean dan unit varians. Walaupun kita membangkitkan 2 tipe dari noise ini
dengan menggunakan imnoise, pada matlab fungsi rand untuk uniform bilangan random dan
rand untuk normal (Gaussian) bilangan random.
Fungsi rand dengan menggunakan matlab adalah
= (,)
Sumber utama munculnya noise dalam citra digital adalah pada saat proses mendapatkan
data gambar (atau digitisasi) dan juga pada saat transmisi. Sifat-sifat noise ditunjukkan oleh
parameter-parameter yang mendefinisikan karakteristik spasial dari noise.
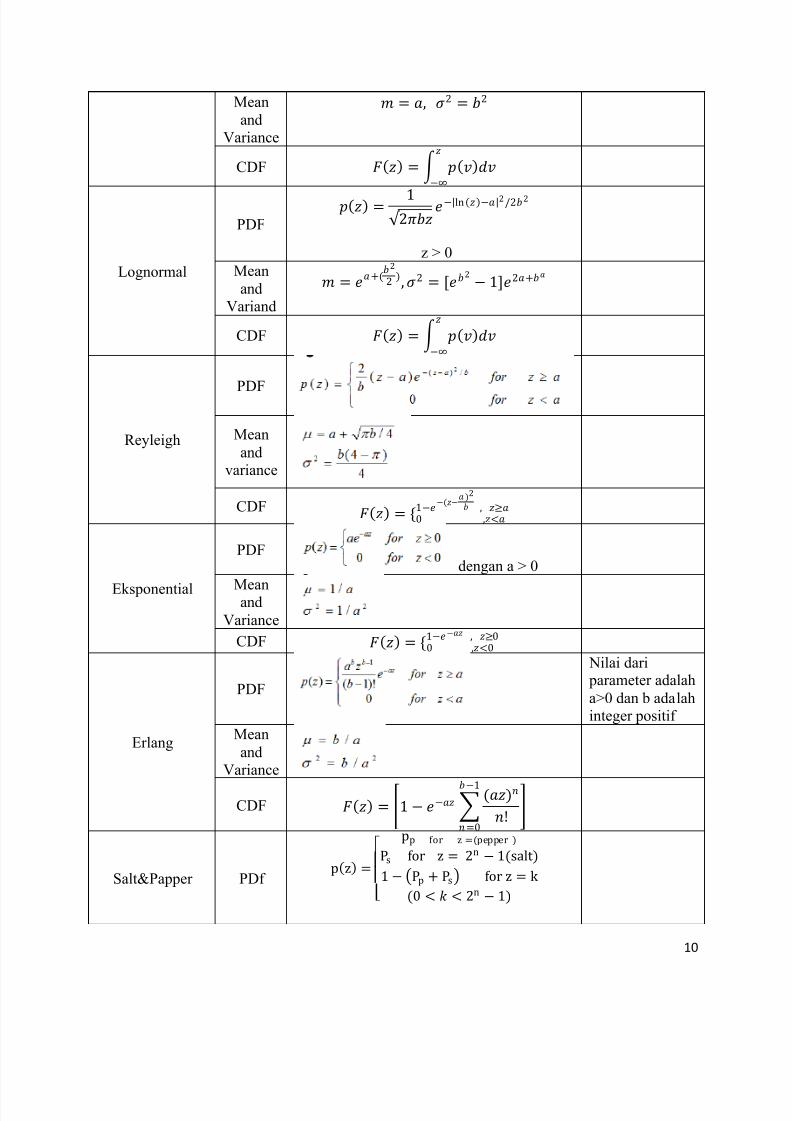
Uniform
Mean
andVariance
CDF
Gaussian PDF
z menyatakantingkat keabuan,
menyatakanrata-rata dari z,
dan adalahdeviasi standard.Pangkat dua dari
deviasi standarddisebut variance
dari z
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 10/45
10
Mean
andVariance
= , 2 = 2
CDF =
−∞
Lognormal
PDF = 1 2−ln−2/22
z > 0
Mean
andVariand
= +(2
2),2 = [2 − 1]2+
CDF = −∞
Reyleigh
Mean
andvariance
CDF = {0 ,<1−−(− )2 , ≥
Eksponential
PDFdengan a > 0
Meanand
Variance
CDF = {0 ,<01−− , ≥0
Erlang
Nilai dari parameter adalah
a>0 dan b adalahinteger positif
Mean
andVariance
CDF = 1− − ()!−1
=0
Salt&Papper PDfpz =
pp for z =(pepper )
Ps for z = 2n − 1(salt)
1− Pp + Ps for z = k
(0 < < 2n − 1)

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 11/45
11
Meanand
Variance
= 0 + 1 − − + 2 − 1 2 = 0−2 + −21 − − + (2 − 1−)2
CDF
=
0
< 0
0 ≤ < 1− ≤ < 2 − 1
1 2 − 1 ≤
I.2.3 Periodic Noise
Noise periodic dalam membangkitkan gambar dari enterperensi mekanik sepanjang sisi
image. Ini hanyalah tipe dari spasial noise yang bergantung pada spasial. Tipecal dari noise
periodik di handel dengan filter dalam frekuensi domain. Model dalam periodi noise
2Dsebagaimana sinusoid diskrit dengan persamaan dibaah ini:
(,) = sin[20 + +
20 + ]
Untuk x=0,1,2,...,M-1 dan y=0,1,2,...,N-1, dimana A adalah amplitudo, 0 dan 0 adalah
determinan dari frekuensi sunosuedal yang bersesuaian dengan x dan y, dan Bx dan By adalah
perpindahan dengan bergantung pada keadaan awal . DFT dari persamaan ini adalah :
, = 2[−20 +0 + 0, + 0 − 20 − 0, − 0]
Untuk u= 0,1,2,...,M-1 dan v=0,1,2,...,N-1,sebagaimana kita lihat pasangan dari titik kompleks
konjugat dari impuls unit yang ditempatkan pada (u+u0,v+v0) dan (u-u0,v-v0), dengan kata lain,
persamaan pertama
CONTOH :
function [r, R, S] = imnoise3(M, N, C, A, B) [K, n] = size(C); if nargin == 3
A(1:K) = 1.0; B(1:K, 1:2) = 0;
elseif nargin == 4 B(1:K, 1:2) = 0;
end R = zeros(M, N); for j = 1:K
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 12/45
12
u1 = M/2 + 1 + C(j, 1); v1 = N/2 + 1 + C(j, 2); R(u1, v1) = i * (A(j)/2) * exp(i*2*pi*C(j, 1) * B(j, 1)/M); u2 = M/2 + 1 - C(j, 1); v2 = N/2 + 1 - C(j, 2); R(u2, v2) = -i * (A(j)/2) * exp(i*2*pi*C(j, 2) * B(j, 2)/N);
end S = abs(R); r = real(ifft2(ifftshift(R))); end
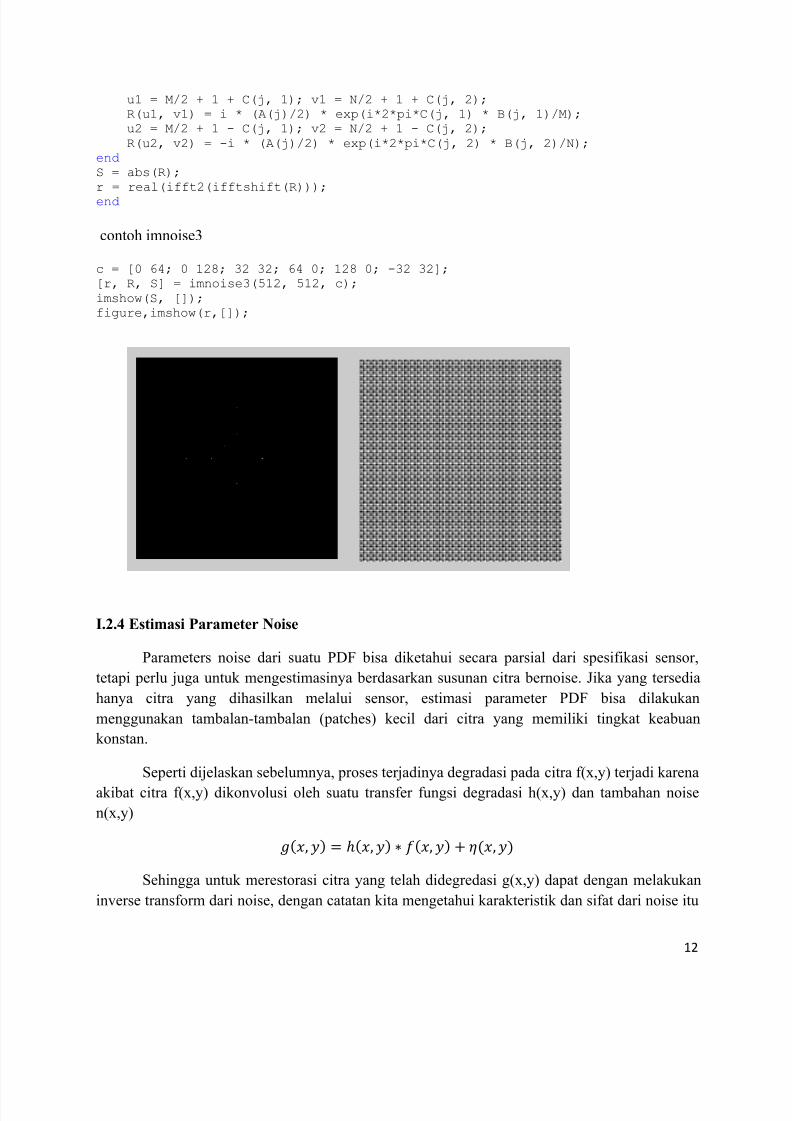
contoh imnoise3
c = [0 64; 0 128; 32 32; 64 0; 128 0; -32 32]; [r, R, S] = imnoise3(512, 512, c); imshow(S, []); figure,imshow(r,[]);
I.2.4 Estimasi Parameter Noise
Parameters noise dari suatu PDF bisa diketahui secara parsial dari spesifikasi sensor,
tetapi perlu juga untuk mengestimasinya berdasarkan susunan citra bernoise. Jika yang tersedia
hanya citra yang dihasilkan melalui sensor, estimasi parameter PDF bisa dilakukan
menggunakan tambalan-tambalan (patches) kecil dari citra yang memiliki tingkat keabuan
konstan.
Seperti dijelaskan sebelumnya, proses terjadinya degradasi pada citra f(x,y) terjadi karena
akibat citra f(x,y) dikonvolusi oleh suatu transfer fungsi degradasi h(x,y) dan tambahan noise
n(x,y)
, = , ∗ , + (,)
Sehingga untuk merestorasi citra yang telah didegredasi g(x,y) dapat dengan melakukan
inverse transform dari noise, dengan catatan kita mengetahui karakteristik dan sifat dari noise itu
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 13/45
13
sendiri. Sehingga pada suatu kasus citra berderau kita dapat memprediksikan sifat noise model
yang terjadi, dengan analisa melalui grafik histogram pada suatu potongan citra dengan variasi
grayscale yang rendah (potongan gambar polos/berfrekuensi rendah). Dengan melakukan analisa
tersebut kita dapat melakukan pendekatan persamaan noise yang terjadi pada citra g(x,y).
I.3 Restoration in the Presence of Noise Only-Spatial Filtering
Ketika hanya degradasi yang tampil dalam sebuah gambar adalah noise, persamaan I.1 menjadi :
, = , + (,)
Istilah noise disini tidak diketahui, sehingga menguranginya dari g(x, y) atau G(u, v) bukanlahsebuah pilihan yang realistis. Dalam kasus noise periodik, hal ini biasanya mungkin untuk
memperkirakan N(u,v) dari spektrum G(u, v) seperti yang disebutkan di Section 5.2.3. Dalam
kasus ini N(u, v) dapat dikurangi dari G(u,v) untuk mendapatkan sebuah perkiraan dari gambar
sebenarnya. Secara umum, meskipun tipe pengetahuan ini adalah pengecualian daripada aturan.
Spasial Filtering adalah metode pemilihan dalam situasi dimana hanya additive noise yang
muncul. Dalam faktanya perbaikan dan restorasi menjadi hampir aturan yang tidak dapatdibedakan dalam kasus seperti ini.
I.3.1 Spatial Noise Filter
Pada prinsip sederhananya penghilangan noise dengan spatial filter adalah dengan
mengaplikasikan filter lolos frekuensi rendah (bluring) sehingga dengan begitu derau yangmempunyai perubahan nilai grayscale yang tinggi (berfrekuensi tinggi) akan tidak lolos, namun
terdapat pengembangan teknik denoising selain dengan menggunakan bluring filter, berikut ini
adalah beberapa metode denosing:
a. Arithmatic Mean Filtering
Arithmatic Mean Filtering pada prinsipnya sama dengan smoothing filter yang
sudah di bahas pada topic sebelumnya tentang spatial filtering, dengan teknik smoothing
filter maka citra akan mengalami bluring sehingga noise dengan sendirinya akan
berkurang. Persamaan umum dari arithmatic mean filtering adalah seperti halnya
persamaan untuk menghitung rata-rata yaitu sebagai berikut:
Ini adalah metode paling mudah dari mean filters. Misalkan Sxy mewakili
himpunan koordinat dalam sebuah window kotak subimage berukuran m x n, berpusat dititik (x, y). Proses Arithmetic Mean Filtering menghitung rata – rata nilai dari gambar
yang rusak g(x, y) pada area yang didefinisika oleh Sxy. Nilai dari gambar yang
diperbaiki pada tiap titik (x, y) adalah arithmetic mean mudah yang dihitung denganmenggunakan pixel dalam daerah yang didefinisikan oleh Sxy. Dengan kata lain :
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 14/45
14
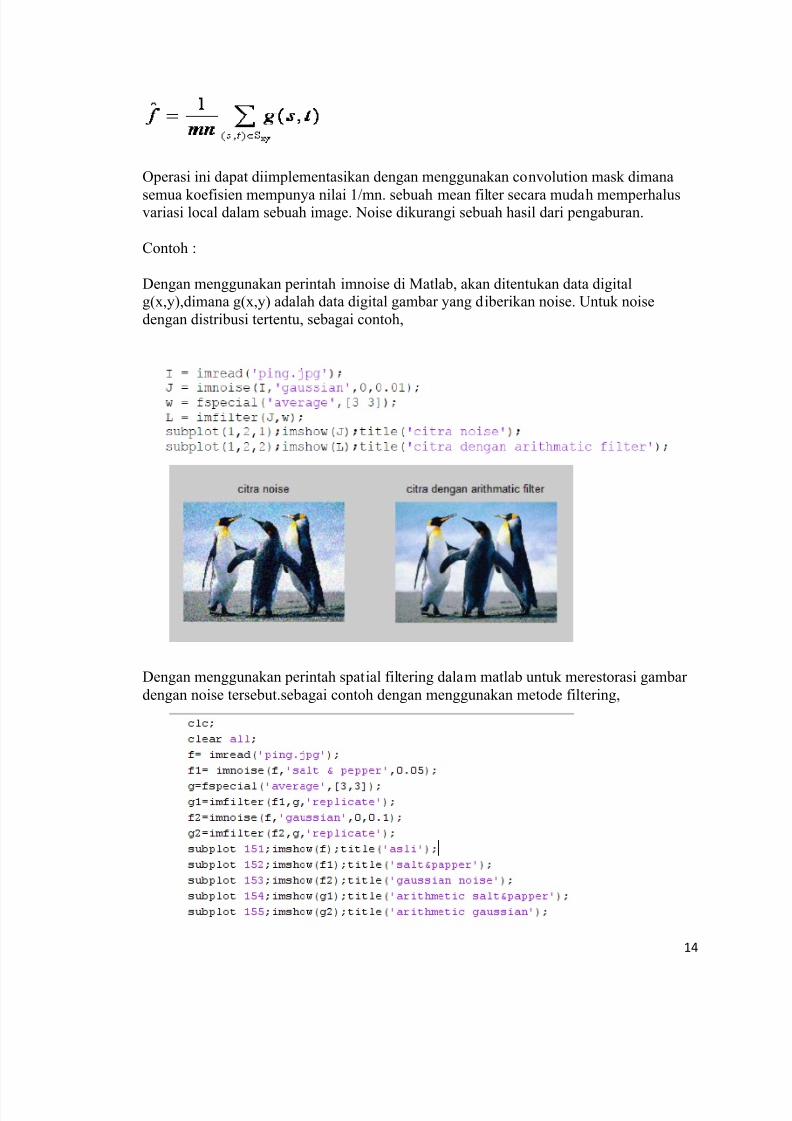
Operasi ini dapat diimplementasikan dengan menggunakan convolution mask dimana
semua koefisien mempunya nilai 1/mn. sebuah mean filter secara mudah memperhalusvariasi local dalam sebuah image. Noise dikurangi sebuah hasil dari pengaburan.
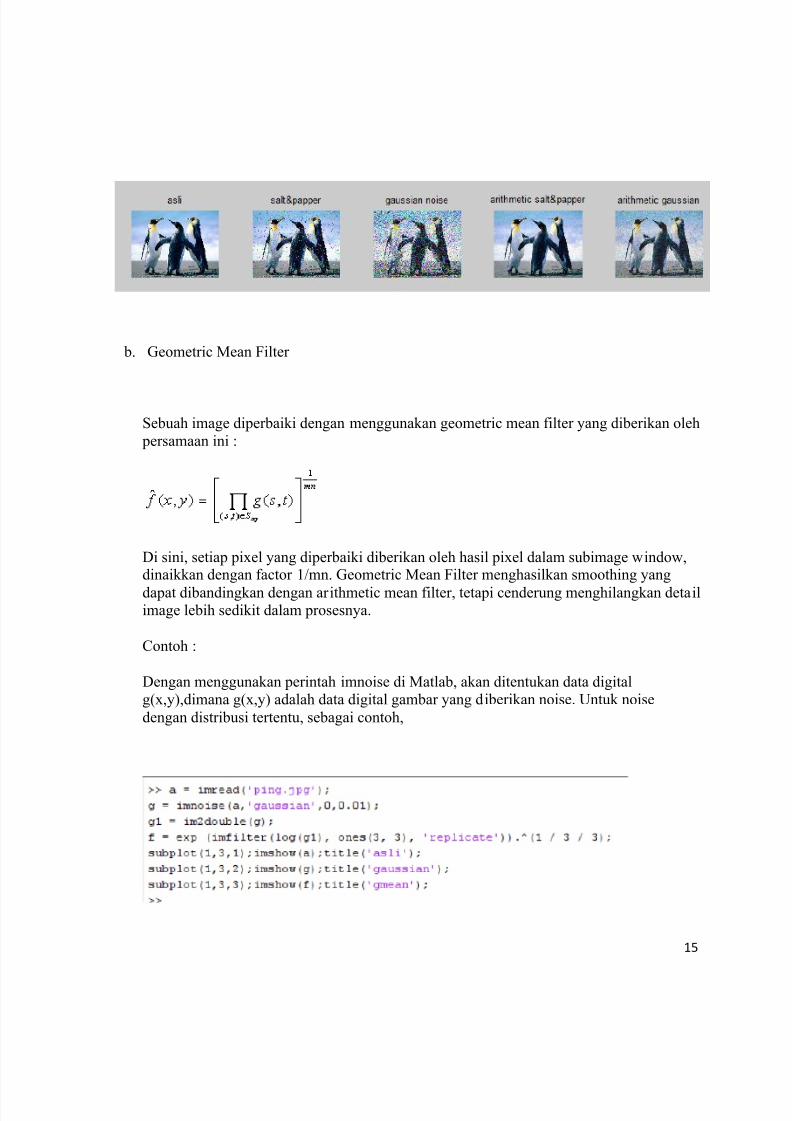
Contoh :
Dengan menggunakan perintah imnoise di Matlab, akan ditentukan data digitalg(x,y),dimana g(x,y) adalah data digital gambar yang diberikan noise. Untuk noise
dengan distribusi tertentu, sebagai contoh,
Dengan menggunakan perintah spatial filtering dalam matlab untuk merestorasi gambar
dengan noise tersebut.sebagai contoh dengan menggunakan metode filtering,
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 15/45
15
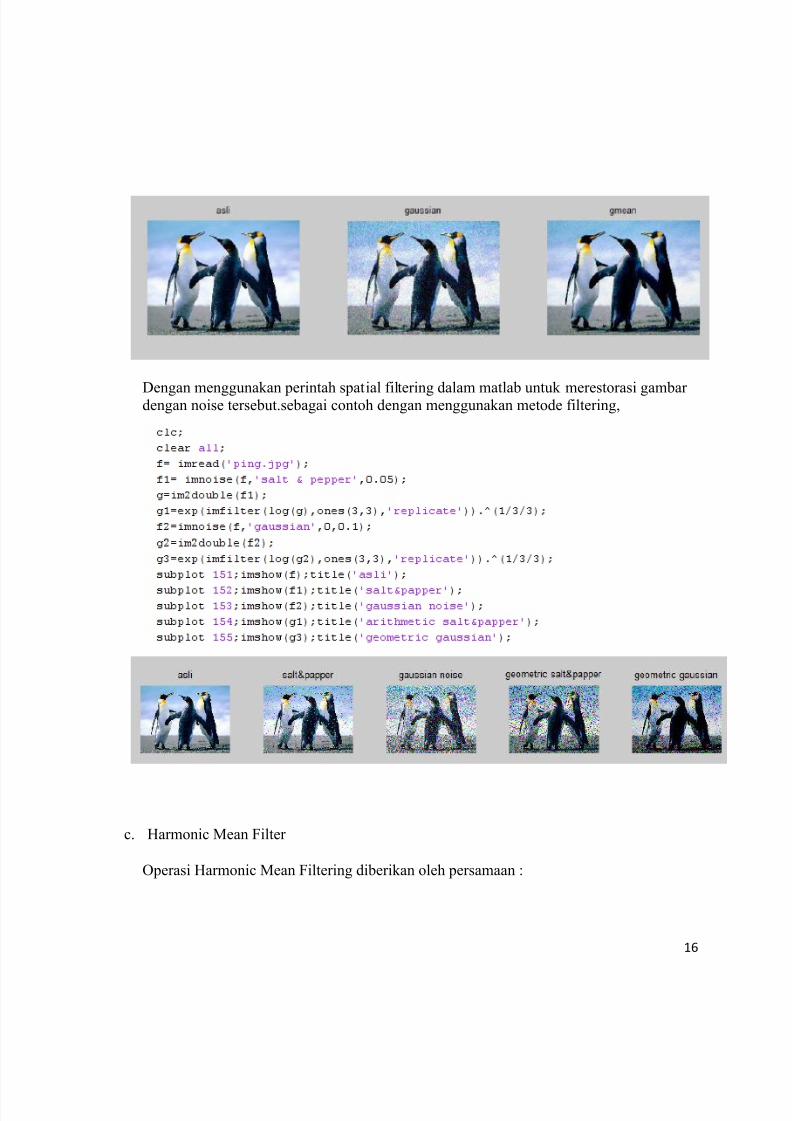
b. Geometric Mean Filter
Sebuah image diperbaiki dengan menggunakan geometric mean filter yang diberikan oleh
persamaan ini :
Di sini, setiap pixel yang diperbaiki diberikan oleh hasil pixel dalam subimage window,dinaikkan dengan factor 1/mn. Geometric Mean Filter menghasilkan smoothing yang
dapat dibandingkan dengan arithmetic mean filter, tetapi cenderung menghilangkan detailimage lebih sedikit dalam prosesnya.
Contoh :
Dengan menggunakan perintah imnoise di Matlab, akan ditentukan data digitalg(x,y),dimana g(x,y) adalah data digital gambar yang diberikan noise. Untuk noise
dengan distribusi tertentu, sebagai contoh,
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 16/45
16
Dengan menggunakan perintah spatial filtering dalam matlab untuk merestorasi gambardengan noise tersebut.sebagai contoh dengan menggunakan metode filtering,
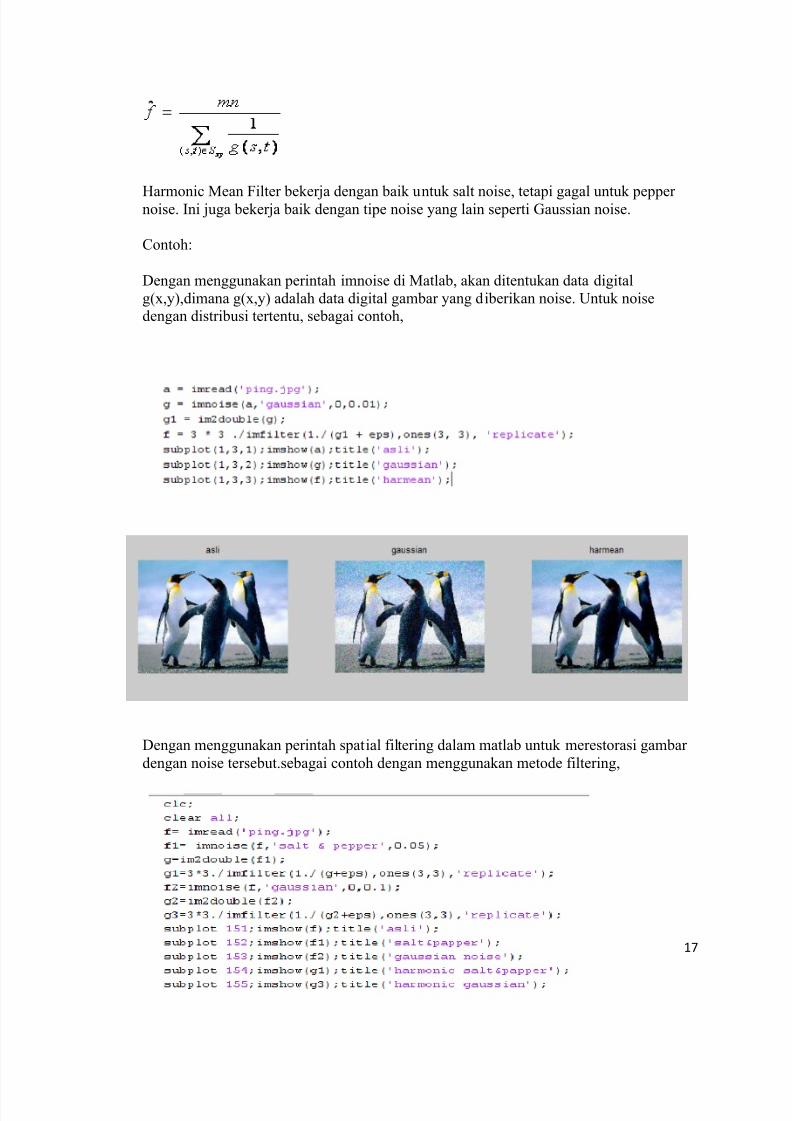
c. Harmonic Mean Filter
Operasi Harmonic Mean Filtering diberikan oleh persamaan :
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 17/45
17
Harmonic Mean Filter bekerja dengan baik untuk salt noise, tetapi gagal untuk peppernoise. Ini juga bekerja baik dengan tipe noise yang lain seperti Gaussian noise.
Contoh:
Dengan menggunakan perintah imnoise di Matlab, akan ditentukan data digital
g(x,y),dimana g(x,y) adalah data digital gambar yang diberikan noise. Untuk noisedengan distribusi tertentu, sebagai contoh,
Dengan menggunakan perintah spatial filtering dalam matlab untuk merestorasi gambar
dengan noise tersebut.sebagai contoh dengan menggunakan metode filtering,

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 18/45
18
d. Contraharmonic Mean Filter
Filter ini sangat cocok untuk mengurangi atau secara virtual mengeleminasi efek salt-
and-papper noise. Untuk nilai Q positif, filter mengeleminasi papper noise. Untuk niali
Q negatif ini mengeleminasi salt noise. Ini tidak dapat melakukan keduanya secara
bersamaan. Perhatikan bahwa contraharmonic filter mengurangi pada arithmatic mean
filter jika Q=0, dan ke harmonic mean filter jika Q = -1
e.
Median FilterMerupakan order statistic filter yang paling banyak diketahui, yang mana sesuai
namanya, mengganti nilai pixel dengan median dari gray level dalam neighbourhood dan
pixel itu. Nilai asli dari pixel diikutkan dalam komputasi median. Median filters sangat
populer karena untuk tipe-tipe tertentu random noise, dia memberikan kemampuan
noise-reduction yang sangat baik, dengan blurring yang amat lebih sedikit daripada
linear snoothing filter dari ukuran yang sama. Median filter memberikan hasil yang
sangat bagus untuk image yang dirusak oleh tipe noise ini.
f. Max and min filters
Filter ini sangat berguna untuk menemukan titik paling terang dari sebuah image. Juga,
karena pepper noise mempunyai nilai yang sangat rendah, ini dikurangi dengan filter ini
sebagai hasil dari proses max selection dalam subimage area Sxy. Filter ini sangat

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 19/45
19
berguna untuk menemukan titik tergelap dalam image. Juga, ini mengurangi salt noise
sebagai hasil dari min operation.
g. Midpoint Filter
Midpoint filter dengan mudah menghitung midpoint antara nilai maksimum dan
minimum dalam area yang dicakup oleh filter. Perhatikan bahwa filter ini
mengkombinasikan order statistic dan averaging. Filter ini bekerja paling baik untuknoise yang tersebar acak, seperti Gaussian atau uniform noise.
h. Alpha-trimmed mean filter
Misalkan kita menghapus nilai gray-level d/2 paling rendah dan d/2 paling tinggi dari
g(s,t) dalam neighbourhood Sxy. Anggap g(s,t) mewakili mn-d pixel yang tersisa.
Sebuah filter yang dibentuk dengan averaging pixel
Contoh 1:
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 20/45
20
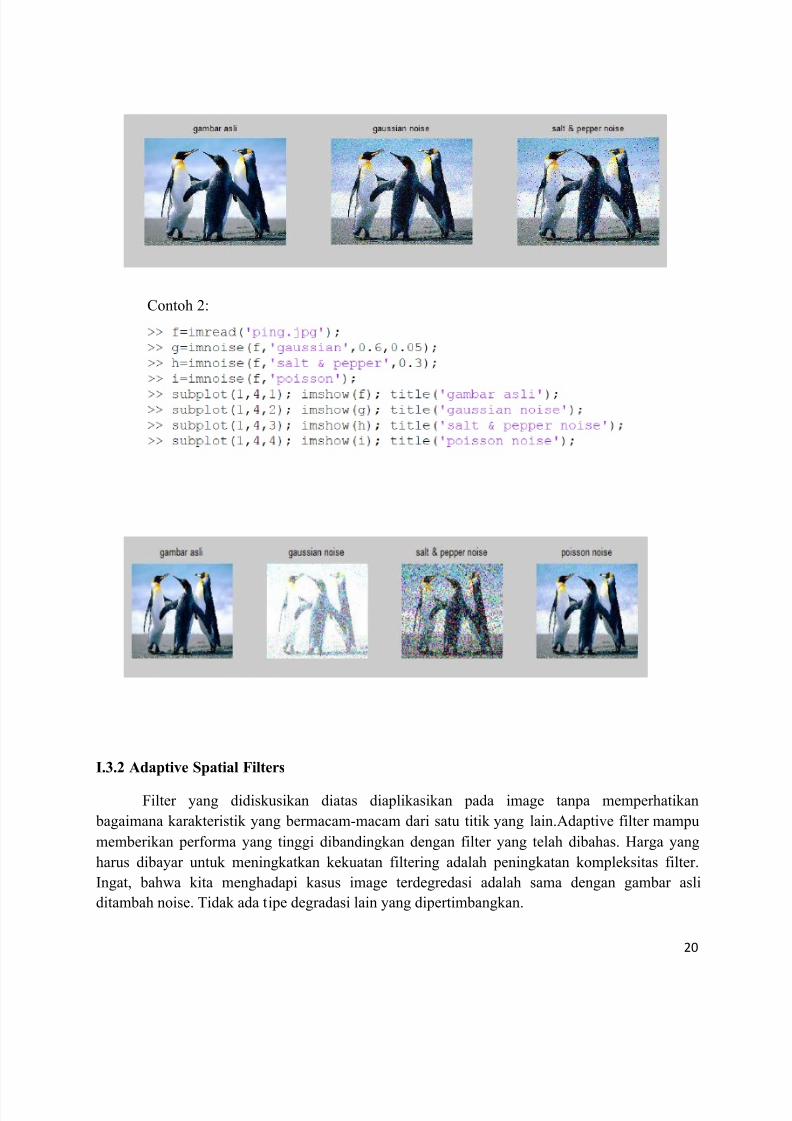
Contoh 2:
I.3.2 Adaptive Spatial Filters
Filter yang didiskusikan diatas diaplikasikan pada image tanpa memperhatikan
bagaimana karakteristik yang bermacam-macam dari satu titik yang lain.Adaptive filter mampu
memberikan performa yang tinggi dibandingkan dengan filter yang telah dibahas. Harga yang
harus dibayar untuk meningkatkan kekuatan filtering adalah peningkatan kompleksitas filter.
Ingat, bahwa kita menghadapi kasus image terdegredasi adalah sama dengan gambar asli
ditambah noise. Tidak ada tipe degradasi lain yang dipertimbangkan.

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 21/45
21
Adaptive, local noise reduction filterPerhitungan statistic dari variabel acak yang paling sedrhana adalah mean dan variance.
Mereka adalah parameter yang layak untuk mendasari sebuah adaptive filter karena
mereka memberikan jumlah secara dekat yang berhubungan dengan penampilan image.
Mean memberikan ukuran rata-rata gray-level dalam region dimana mean dihitung, dan
variance memberikan ukuran rata-rata kontras dalam region itu.
Adaptive median filter
Algoritma adaptive median filtering bekerja dalam dua level A dan level B, seperti
berikut:
Level A: if Zmin < Zmed < Zmax, ke level Belse meningkat ke window size
If window size ≤ Smax, ulangi level A
Else output Z med
Level B: if Zmin < Zxy < Zmax, output Zxy
Else output Zmed
I.4 Periodic Noise Reduction by Frequency Domain Filtering
Band Reject FilterFilter ini menghilangkan atau melemahkan band(pita) frequency sekita asal dari
transformasi Fourier terjadi.
Ideal band reject
, =
1 , < 0 − 20 0 −2 ≤ 0 +
2
1
,
>
0 +
2
Dimana , = 2 + 2
Butterworth band reject

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 22/45
22
, =1
1 + 2, 2, − 022
Gaussian band reject
, = 1− −12 2 ,2 ,−0
22
Bandpass Filter
Filter ini merupakan kebalikan dari metode Bandreject. Filter ini jarang
digunakan karena dapat menghilangkan banyak detail gambar. Tetapi filter ini dapat
digunakan untuk mengisolasi jenis frequency tertentu.
Notch Filter
Jika kedua filter diatas melakukan operasi disekitar asal dari transformasi Hourier,
maka filter Notch melakukan operasi (reject/pass) diarea sekitar pusat/asal dari frequency
Ideal notch filter:
, = 0 1, ≤ 0 2(, ) ≤ 0
1 Dimana
1, = ( −2 − 0)2 + ( − 2 − 0)20.5
Dan
2, = ( − 2− 0)2 + ( −
2− 0)20.5
Butterworth notch filter:
, =1
1 + 021,2,
Gaussian notch
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 23/45
23
, = 1− −12 0
21 ,2 ,2
Contoh:
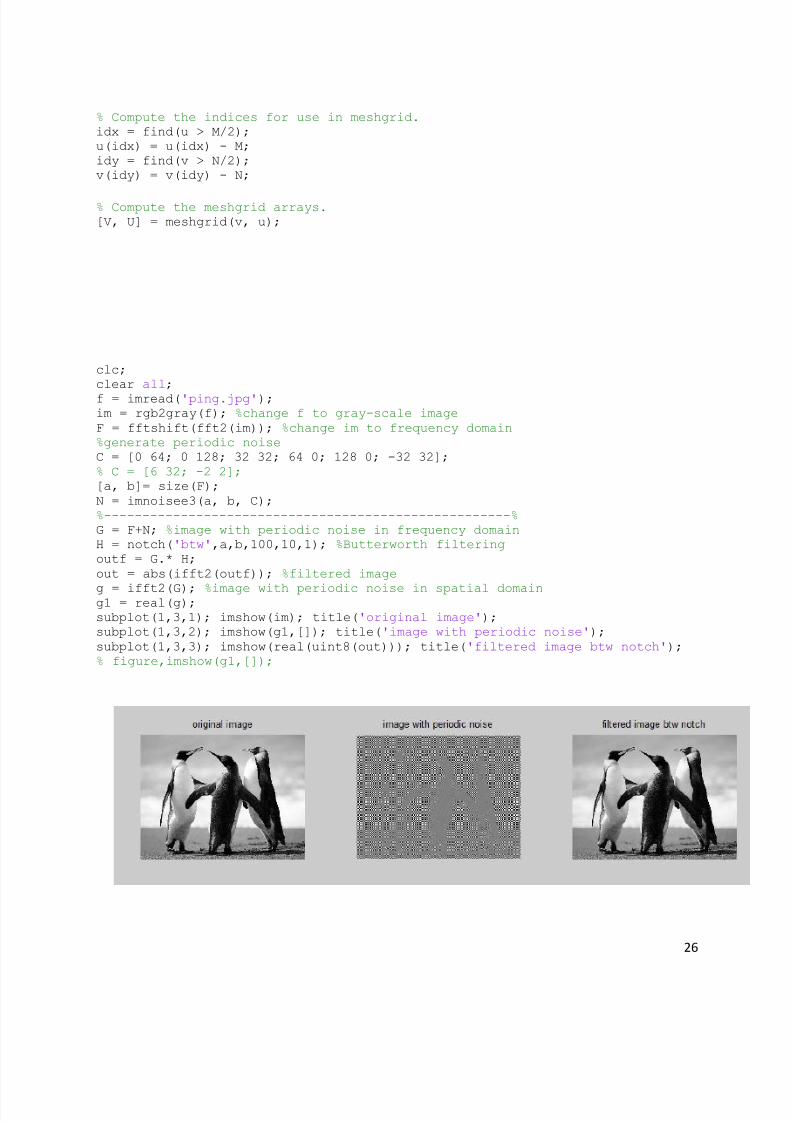
Kita memiliki gambar yang akan digenerate menjadi periodik noise menggunakan
butterworth notch filtering
Pertama-tama definisikan fungsi imnoise3 dan notch:
function [r, R, S] = imnoise3(M, N, C, A, B) %IMNOISE3 Generates periodic noise. % [r, R, S] = IMNOISE3(M, N, C, A, B), generates a spatial % sinusoidal noise pattern, r, of size M-by-N, its Fourier % transform, R, and spectrum, S. The remaining parameters are:
% % C is a K-by-2 matrix with K pairs of freq. domain coordinates (u, % v) that define the locations of impulses in the freq. domain. The % locations are with respect to the frequency rectangle center at % (floor(M/2) + 1, floor(N/2) + 1). The impulse locations are spe- % cified as increments with respect to the center. For ex, if M = % N = 512, then the center is at (257, 257). To specify an impulse % at (280, 300) we specify the pair (23, 43); i.e., 257 + 23 = 280, % and 257 + 43 = 300. Only one pair of coordinates is required for % each impulse. The conjugate pairs are generated automatically.
% % A is a 1-by-K vector that contains the amplitude of each of the % K impulse pairs. If A is not included in the argument, the
% default used is A = ONES(1, K). B is then automatically set to % its default values (see next paragraph). The value specified % for A(j) is associated with the coordinates in C(j, 1:2).
% % B is a K-by-2 matrix containing the Bx and By phase components % for each impulse pair. The default values for B are B(1:K, 1:2) % = 0.
% Copyright 2002-2004 R. C. Gonzalez, R. E. Woods, & S. L. Eddins % Digital Image Processing Using MATLAB, Prentice-Hall, 2004 % $Revision: 1.5 $ $Date: 2004/11/04 22:32:42 $
% Process input parameters.
K= size(C,1); if nargin < 4 A = ones(1,K);
end if nargin < 5
B = zeros(K,2); end i = 0 + 1.0000i; % Generate R. R = zeros ( M , N ) ;
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 24/45
24
for j=1:K % Based on t h e equation f o r R ( u , v ) , we know t h at t h e f i rst t
e rm % of R ( u , v ) associated wit h a s i n usoid is o u n l e s s u = -uo and % v = -vo :
u1 = floor( M / 2 ) + 1 - C(j,1) ; v1 = floor( N / 2 ) + 1 - C(j,2) ; R(u1,v1) = i*M*N*(A(j)/2)*exp(-i*2*pi*(C(j,1)*B(j,1)/M+C(j,2)*B(j,2)/N))
; u2 = floor( M / 2 ) + 1 + C(j,1) ; v2 = floor( N / 2 ) + 1 + C(j,2) ; R ( u2 , v2 ) =-i*M*N*(A(j)/2)*exp(i*2*pi*(C(j,1)*B(j,1)/M+
C(j,2)*B(j,2)/N));
end % Compute t h e spectrum and spatial s i n u soidal pattern . S = abs ( R ) ; r = real ( ifft2 ( ifftshift(R)));
function H = notch(type, M, N, D0, x, y, n) %notch Computes frequency domain notch filters % H = NOTCH(TYPE, M, N, D0, x, y, n) creates the transfer function of % a notch filter, H, of the specified TYPE and size (M-by-N). centered at % Column X, Row Y in an unshifted Fourier spectrum. % Valid values for TYPE, D0, and n are: % % 'ideal' Ideal highpass filter with cutoff frequency D0. n % need not be supplied. D0 must be positive % % 'btw' Butterworth highpass filter of order n, and cutoff D0. % The default value for n is 1.0. D0 must be positive. % % 'gaussian' Gaussian highpass filter with cutoff (standard deviation) % D0. n need not be supplied. D0 must be positive. %
% The transfer function Hhp of a highpass filter is 1 - Hlp, % where Hlp is the transfer function of the corresponding lowpass % filter. Thus, we can use function lpfilter to generate highpass % filters.
if nargin == 6 n = 1; % Default value of n.
end
% Generate highpass filter. Hlp = lpfilter(type, M, N, D0, n); H = 1 - Hlp; H = circshift(H, [y-1 x-1]);
function H = lpfilter(type, M, N, D0, n) %LPFILTER Computes frequency domain lowpass filters
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 25/45
25
% H = LPFILTER(TYPE, M, N, D0, n) creates the transfer function of % a lowpass filter, H, of the specified TYPE and size (M-by-N). To % view the filter as an image or mesh plot, it should be centered % using H = fftshift(H). % % Valid values for TYPE, D0, and n are: % % 'ideal' Ideal lowpass filter with cutoff frequency D0. n need % not be supplied. D0 must be positive % % 'btw' Butterworth lowpass filter of order n, and cutoff D0. % The default value for n is 1.0. D0 must be positive. % % 'gaussian' Gaussian lowpass filter with cutoff (standard deviation) % D0. n need not be supplied. D0 must be positive.
% Use function dftuv to set up the meshgrid arrays needed for
% computing the required distances. [U, V] = dftuv(M, N);
% Compute the distances D(U, V). D = sqrt(U.^2 + V.^2);
% Begin fiter computations. switch type case 'ideal'
H = double(D <=D0); case 'btw'
if nargin == 4 n = 1;
end H = 1./(1 + (D./D0).^(2*n));
case 'gaussian'
H = exp(-(D.^2)./(2*(D0^2))); otherwise
error('Unknown filter type.') end
function [U, V] = dftuv(M, N) %DFTUV Computes meshgrid frequency matrices. % [U, V] = DFTUV(M, N) computes meshgrid frequency matrices U and % V. U and V are useful for computing frequency-domain filter % functions that can be used with DFTFILT. U and V are both % M-by-N.
% Copyright 2002-2004 R. C. Gonzalez, R. E. Woods, & S. L. Eddins % Digital Image Processing Using MATLAB, Prentice-Hall, 2004 % $Revision: 1.3 $ $Date: 2003/04/16 22:30:34 $
% Set up range of variables. u = 0:(M - 1); v = 0:(N - 1);
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 26/45

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 27/45
27
I.5 Pemodelan dari fungsi degradasi
Ketika alat yang sama dan alat yang digunakan untuk melakukan pembangkitan terhadap
gambar yang terdegredasi itu tersedia, memungkinkan kita untuk menentukan kealamian dari
degradasi yang dilakukan dengan melakukan percobaandengan berbagai peraturan alat.
Bagaimanapun, ketersidiaan alat dari gambar yang sangat relafen itu menjadu suatu hal yang
dikecualikan lebih kepada aturan kepada penggunaan alat tersebut. Pada solusi dari masalah
restorasi image, dan tipe pendekatan dari eksperimen dengan menggunakan PSFs pembangkit
dan testing dari hasil dengan berbagai algoritma restorasi. Kemudian pendekatan lainnya
berusaha untuk mencobaatau memodelkan dengan matematika PSF, pendekatan inis ebenarnyadiluar dari meanstrem terkait dengan apa yang diskusikan pada bab ini. Untuk pengenalan pada
topik ini, pada akhirnya ketika tidak ada informasi terkait dengan PSF,kita bisa secara terpaksa
melakukan menghilangkan proses dekonkolusi untuk menarik kesimpulan dalam PSF
.pendekatan ini didiskusuikan I.1 dan fokusnya adalah untuk melakukan reminder terkait dengan
sec.yang baru ini dengan teknik untuk modeling PSF denganmenggunakan fungsi imfilter dan
fspetial . secara tidak langsung dengan berbagai fungsi pembangkit noise yang akan didiskusiakn
selanjutnya. Salah satu prinsip degradasi yang akan kita temukan dalam masalah restorasi image
adalah blur image. Blur yang terdapat pada skin dan sensor pada saat istirat dengan kesesuaian
diantaranya bisa dimodelkan dengan domain spatial atau domain frekuensi dengan lowpas filter.
Model degradasi penting lainnya adalah blur image yang disebebkan oleh gerak linier seragam
antara sensor dan skin ketika apusisi image, blur image bisa dimodelakan dengan toolbox
function fspecial sebagaimana dibawah ini :
PSF = fspecial(′motion′ , len, theta)
Tolbox ini disebut fspecial berdasarkan bahwa PSF adalah approximasi efek dari gerak
linier kamera dengan len pixel.parameter theta adalah derajat yang diukur dengan
kesesuaian dengan sumbu horizontal positif pada arah clockwise-counter. Hasil dari len dan
theta adalah 9 dan 0 secara tidak langsung, hal ini sudah diatur. Apakah pengaturan
hubungan ini sesuai motion dari 9 pixel pada arah horizontal.
Kita menggunakan fungsi imfilter untuk menghasilkan image yang di degredasi dengan
PSF yang juga sudah dikenal atau dikomputerisasi dengan menggunakan metode dibawah
ini : ≫ = ,, ′ ′; Dimana „circular‟ digunakan untuk mereduksi efek border.
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 28/45
28
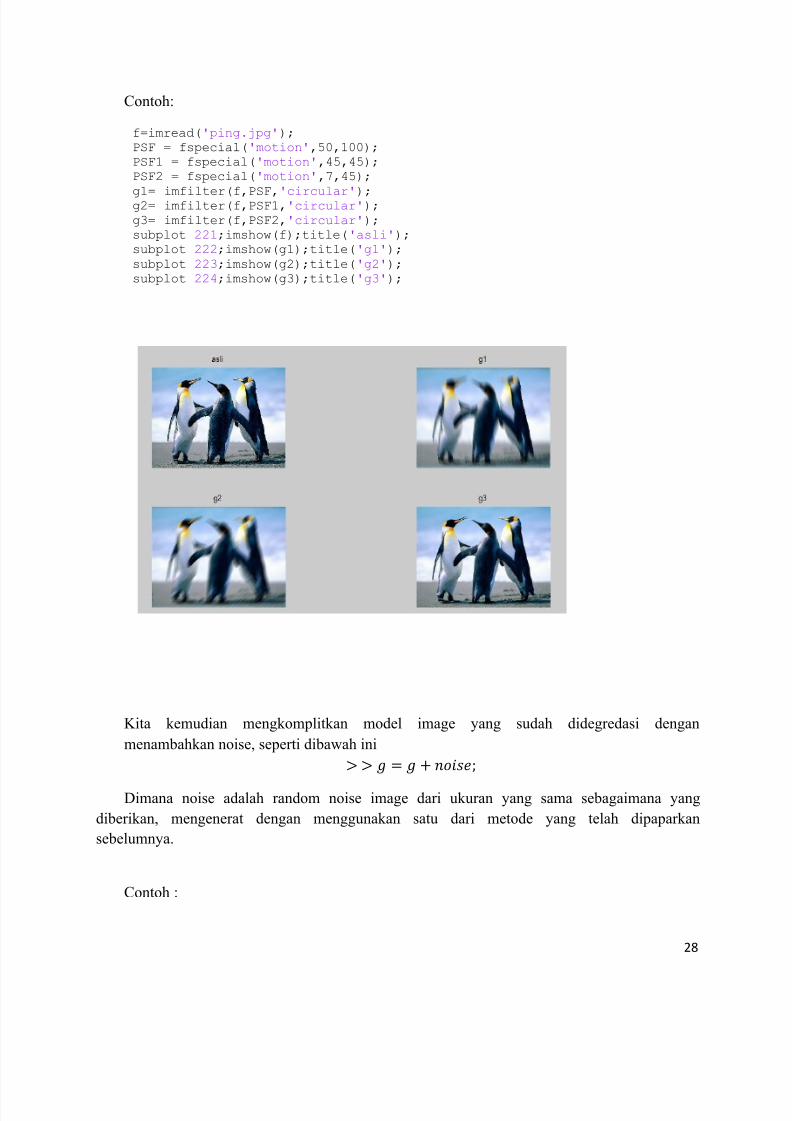
Contoh:
f=imread('ping.jpg'); PSF = fspecial('motion',50,100); PSF1 = fspecial('motion',45,45); PSF2 = fspecial('motion',7,45);
g1= imfilter(f,PSF,'circular'); g2= imfilter(f,PSF1,'circular'); g3= imfilter(f,PSF2,'circular'); subplot 221;imshow(f);title('asli'); subplot 222;imshow(g1);title('g1'); subplot 223;imshow(g2);title('g2'); subplot 224;imshow(g3);title('g3');
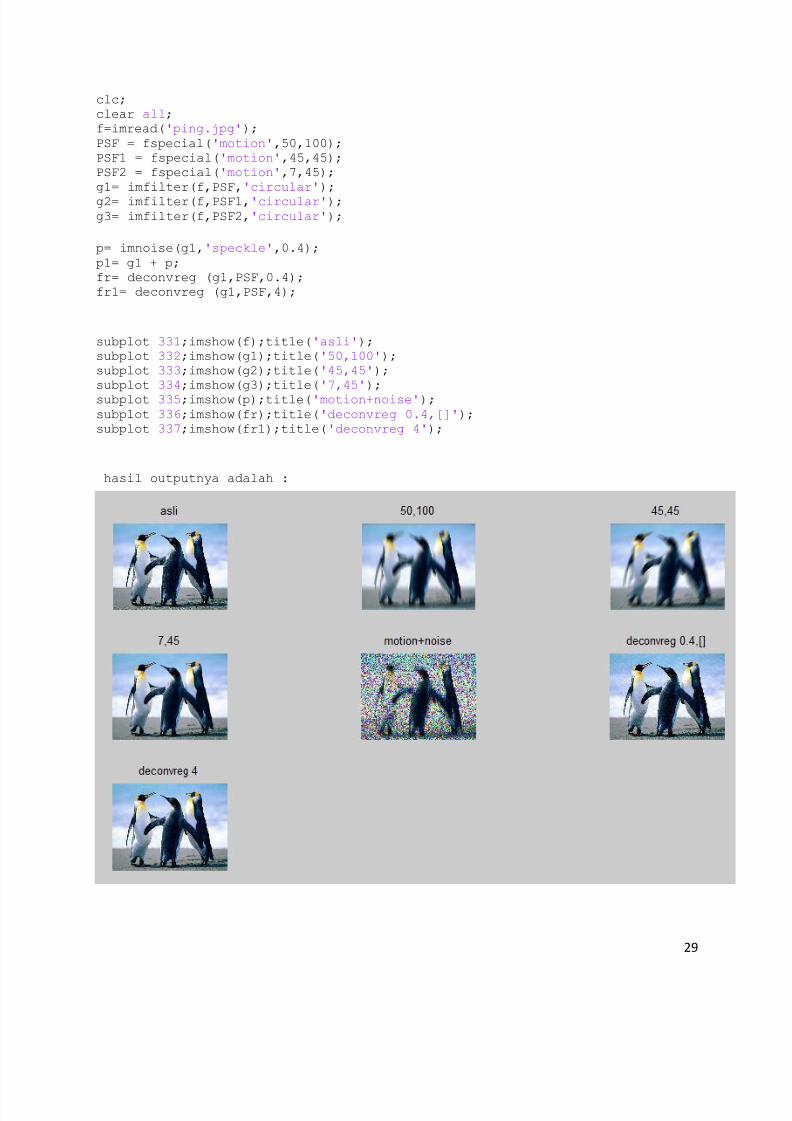
Kita kemudian mengkomplitkan model image yang sudah didegredasi dengan
menambahkan noise, seperti dibawah ini
> >
=
+
;
Dimana noise adalah random noise image dari ukuran yang sama sebagaimana yang
diberikan, mengenerat dengan menggunakan satu dari metode yang telah dipaparkan
sebelumnya.
Contoh :
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 29/45
29
clc; clear all; f=imread('ping.jpg'); PSF = fspecial('motion',50,100); PSF1 = fspecial('motion',45,45); PSF2 = fspecial('motion',7,45); g1= imfilter(f,PSF,'circular'); g2= imfilter(f,PSF1,'circular'); g3= imfilter(f,PSF2,'circular');
p= imnoise(g1,'speckle',0.4); p1= g1 + p; fr= deconvreg (g1,PSF,0.4); fr1= deconvreg (g1,PSF,4);
subplot 331;imshow(f);title('asli'); subplot 332;imshow(g1);title('50,100'); subplot 333;imshow(g2);title('45,45'); subplot 334;imshow(g3);title('7,45'); subplot 335;imshow(p);title('motion+noise'); subplot 336;imshow(fr);title('deconvreg 0.4,[]'); subplot 337;imshow(fr1);title('deconvreg 4');
hasil outputnya adalah :
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 30/45
30
Ketika kita membandingkan antara kesesuaian dari berbagai pendekatan yang telah didiskusikan
ini dan berbagai sec.berikutnya,i ni sangat berguan untuk digunakan untuk gambar yang sama
sehiongga kita bisa mendapatkan perbandingan yang bermanfaat. Tes patern ddigeneret dengan
menggunakan fungsi checkerboard adalah suatu penggunaan yang sangat berarti untuk tuuan ini,
karena ukurannya bisa di skalakan tanpa adanya kecenderungan terkait dengan suatu hal yang
prinsipal, sebagaimana syntaks dibawah ini:
= (,,)
Dimana NP adalah bilangan dari pixel pada sisi dari setiap persegi, M adalah bilangan
dari baris dan N adalah bilangan dari kolom. Jika N diabaikan, maka akan dihasilkan M, dan jika
keduanya N dan M diabaikan maka persegi chekerboard itu dengan 8 persegi pada sisi akan
dibangkitkan jika pada penambahan NP itu diabaikan, itu berarti didaptakan 10 pixel. Kemudian,
light square pada setengah sisi kiri dari checkerboard adalah putihkemudian light square pada
sisi tengah sisi kanannya dari checkerboard adalah gray atau abu-abu. Untuk membangjkitkan
checkerboard ini untuk semua light square berupa warna putih, kita menggunakan command di bawah ini
> > = ,, > 0.5;
Image yang dibangkitkan dengan checkerboard adalah double class dengan range 0,1].
Karena beberapa algoritma restorasi sangat lambat untuk ukuran image, pendekatan yang
baik adalah eksperimen dengan image yang kecil untuk mereduksi waktu komputasi. Untuk
masalah ini, sangat berguna untuk menunjukkan tujuan untuk melakukan zoom pada image
dengan replicasi pixel. Fungsi dibawah ini,sebagaimana yang dijelaskan,
= ( ,,)
Dimana Fungsi ini akan melakukan duplikat pada setiap pixel dalam A dan total dari waktu m
pada arah vertikan dan waktu n pada arah horizontal. Jika n diabaikan, maka akan didapatkan m.
I.6 Constrained Least Squares (Regularized) Filtering
Constrained Least Squares (Regularized) Filtering atau Filter regularized adalah restorasi
linear. Dalam metode ini, optimalitas restorasi didasarkan pada ukuran kehalusan menggunakanturunan kedua dari suatu gambar (Laplacian). Tujuannya adalah untuk menemukan minimum dari
fungsi kriteria C,yang definisikan:
= ∇2 (,)2−1
=0
−1
=0
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 31/45
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 32/45
32
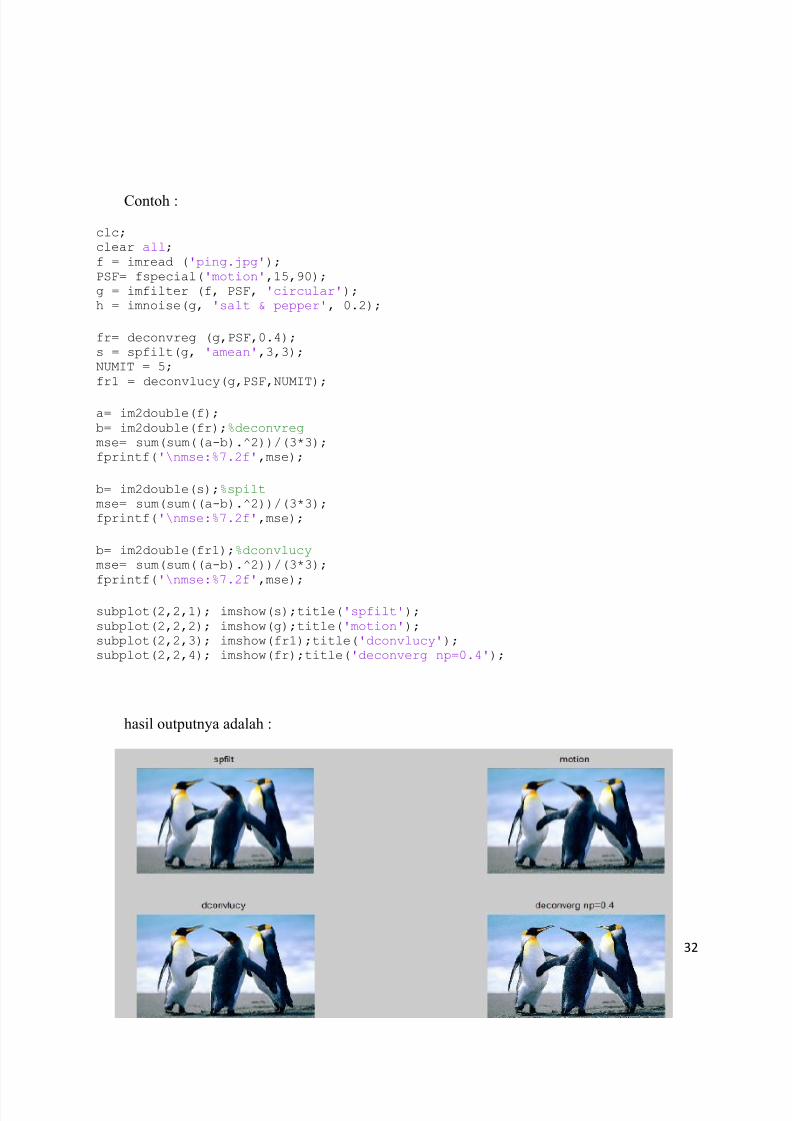
Contoh :
clc; clear all; f = imread ('ping.jpg'); PSF= fspecial('motion',15,90); g = imfilter (f, PSF, 'circular'); h = imnoise(g, 'salt & pepper', 0.2);
fr= deconvreg (g,PSF,0.4); s = spfilt(g, 'amean',3,3); NUMIT = 5; fr1 = deconvlucy(g,PSF,NUMIT);
a= im2double(f); b= im2double(fr);%deconvreg mse= sum(sum((a-b).^2))/(3*3); fprintf('\nmse:%7.2f',mse);
b= im2double(s);%spilt mse= sum(sum((a-b).^2))/(3*3); fprintf('\nmse:%7.2f',mse);
b= im2double(fr1);%dconvlucy mse= sum(sum((a-b).^2))/(3*3); fprintf('\nmse:%7.2f',mse);
subplot(2,2,1); imshow(s);title('spfilt'); subplot(2,2,2); imshow(g);title('motion'); subplot(2,2,3); imshow(fr1);title('dconvlucy'); subplot(2,2,4); imshow(fr);title('deconverg np=0.4');
hasil outputnya adalah :

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 33/45
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 34/45
34
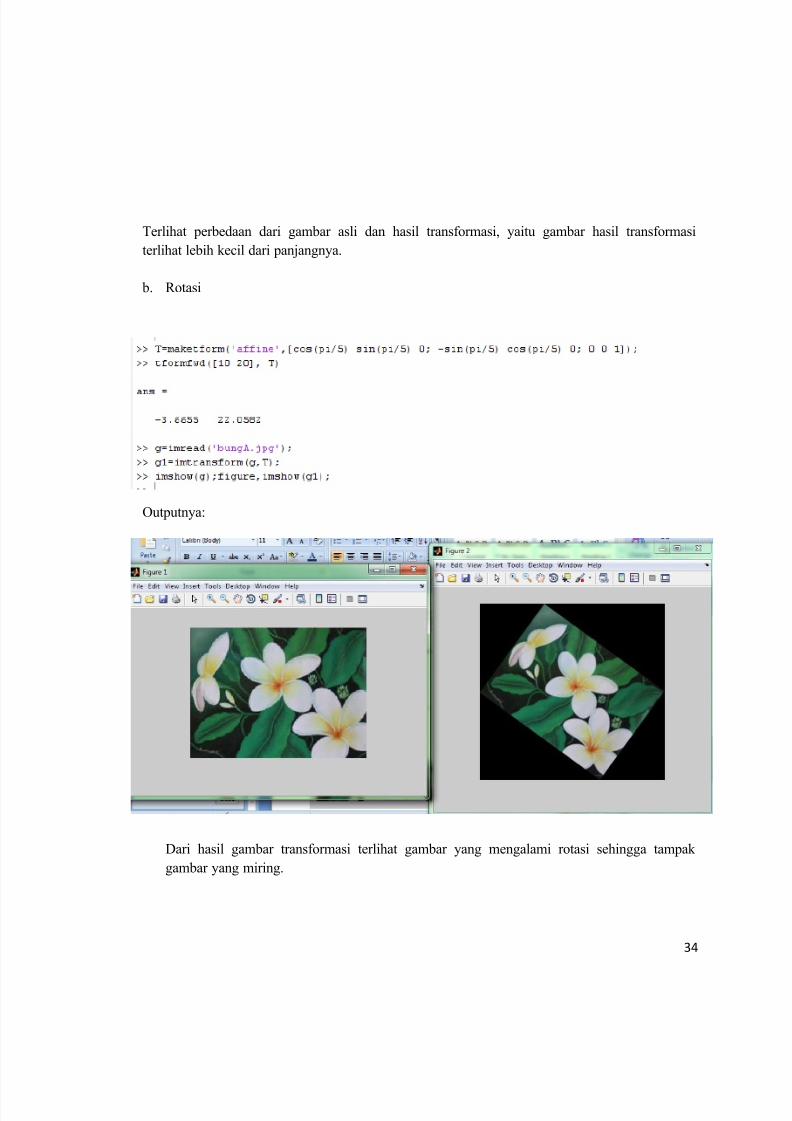
Terlihat perbedaan dari gambar asli dan hasil transformasi, yaitu gambar hasil transformasi
terlihat lebih kecil dari panjangnya.
b.
Rotasi
Outputnya:
Dari hasil gambar transformasi terlihat gambar yang mengalami rotasi sehingga tampak
gambar yang miring.
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 35/45
35
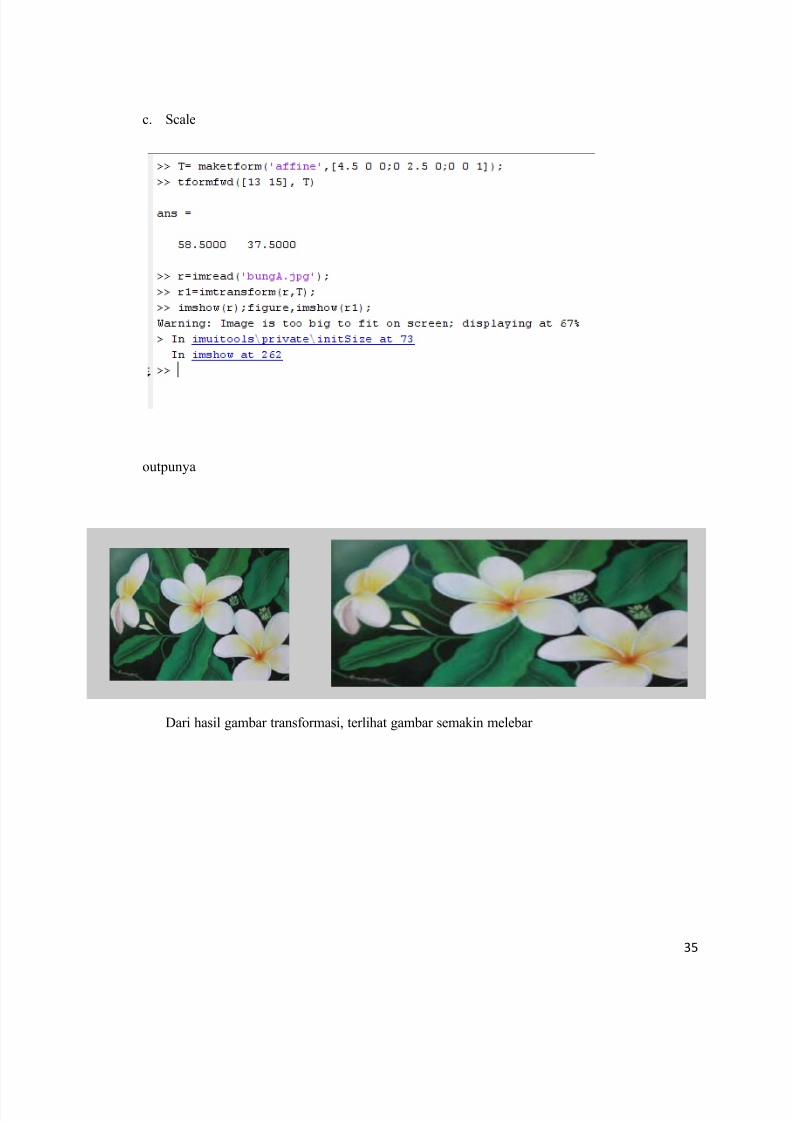
c. Scale
outpunya
Dari hasil gambar transformasi, terlihat gambar semakin melebar
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 36/45
36
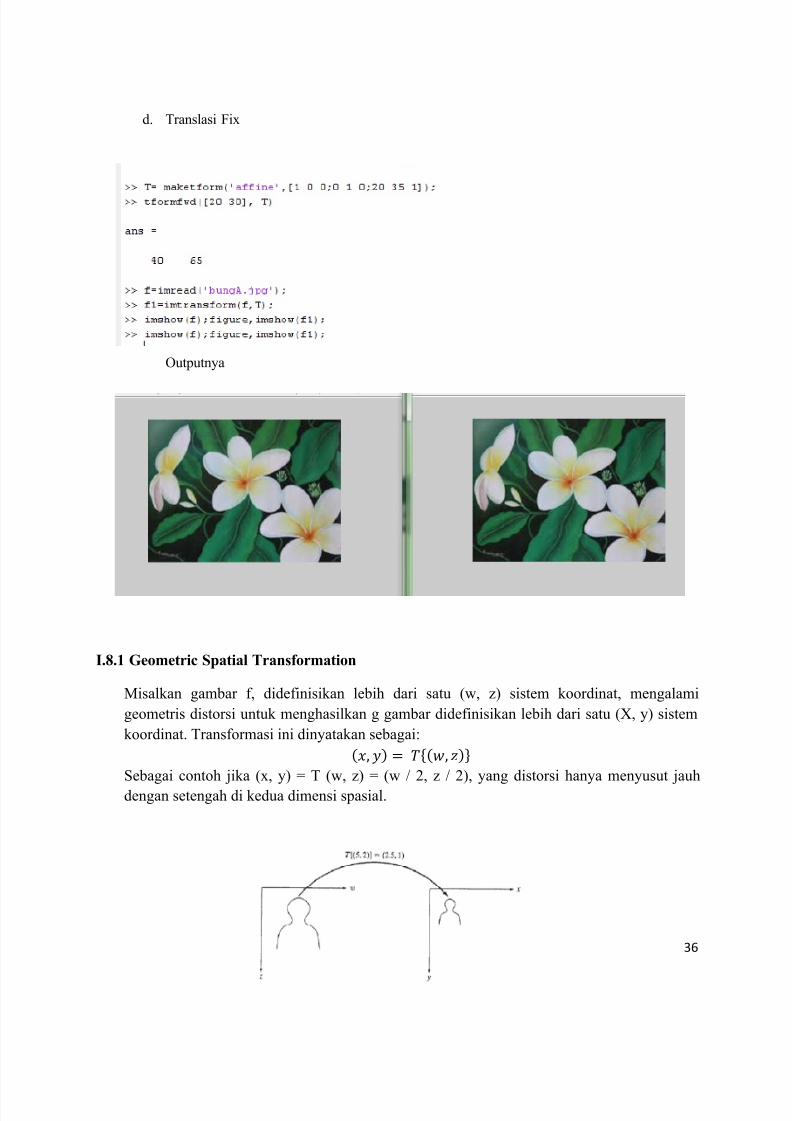
d. Translasi Fix
Outputnya
I.8.1 Geometric Spatial Transformation
Misalkan gambar f, didefinisikan lebih dari satu (w, z) sistem koordinat, mengalami
geometris distorsi untuk menghasilkan g gambar didefinisikan lebih dari satu (X, y) sistem
koordinat. Transformasi ini dinyatakan sebagai:, = , Sebagai contoh jika (x, y) = T (w, z) = (w / 2, z / 2), yang distorsi hanya menyusut jauh
dengan setengah di kedua dimensi spasial.

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 37/45
37
transformasi affine adalah yang paling umum, bentuk digunakan sebagai transformasi
spasial,
Transformasi ini dapat skala, memutar, menerjemahkan, atau geser satu set poin,tergantung
nilai-nilai yang dipilih untuk elemen T.
Fungsi IPT merupakan maketform untuk membuat transformasi spasial,
= (_ , _)
-Jenis Transform: affine, proyektif, kotak, komposit atau kebiasaan.
-Transform parameter tergantung pada Jenis transformasi
I.8.2 Applying Spatial Transformation to Image
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 38/45
38
Dua metode untuk mengubah spasial gambar,
Forward Mapping kompleks dan komputas iexpensive.
pemetaan Inverse lebih mudah untuk diterapkan
fungsi IPT untuk pemetaan terbalik adalah
=
(
,
,
)
dimana f adalah singkatan dari gambar, TForm adalah metode transformasi, interp adalah string
yang ditentukan bagaimana piksel citra input diinterpolasi untuk mendapatkan keluaran piksel
('terdekat', 'bicubic', 'bilinear'Default)
I.8.3 Image Registration
Metode registrasi citra berusaha untuk menyelaraskan duan gambar dari gambar yang
sama.
Sebagai contoh, menyelaraskan dua atau lebih gambar yang diambil pada kira-kira
waktu yang sama, tetapi menggunakan instrumen yang berbeda seperti MRI(magnetic resonance imaging) scan, citra satelit, dll.
registrasi citra didasarkan pada penggunaan kontrol poin atau poin ikatan, bagian dari
piksel yang lokasi dalam dua gambar yang diketahui atau dapat dipilih secara
interaktif.
Setelah sejumlah titik kontrol telah dipilih, IPT fungsi cp2tform dapat digunakan
untuk menyesuaikan jenis tertentu dari transformasi spasial untuk kontrol titik
(menggunakan teknik least square).
a.
Dari transformasi shear
gambar sebelum dan sesudah transformasi
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 39/45
39
BAB II
COLOR IMAGE PROCESSING
II.1 Representasi warna image pada matlab
Misalkan Thar (w, z) dan (x, y) adalah dua spasial sistem koordinat, yang disebut ruang input
dan ruang output , masing-masing. Sebuah transformasi koordinat geometris dapat didefinisikan
yang memetakan titik-titik ruang input ke titik ruang output
Di mana t disebut transformasi ke depan,. memiliki invers, dari peta terbalik otput poin ruang
untuk masukan .
(
,
) =
[
,
,
Pengolahan citra toolbox merupakan transformasi koordinat geometris menggunakan struktur
TForm yang dibuat menggunakan fungsi maketform. Dapat dilihat syntax
tform = maketform(transform_type, params, ...)
Format data citra digital berhubungan erat dengan warna. Pada kebanyakan kasus,terutama untuk keperluan penampilan secara visual, nilai data digital merepresentasikan warnadari citra yang diolah. Format citra digital yang banyak dipakai adalah Citra Biner (monokrom),
Citra Skala Keabuan ( gray scale ), Citra Warna ( true color ), dan Citra Warna Berindeks.
1. Warna
Warna adalah spektrum tertentu yang terdapat di dalam suatu cahaya sempurna
(berwarna putih). Nilai warna ditentukan oleh tingkat kecerahan maupun kesuraman warna. Nilaiini dipengaruhi oleh penambahan putih ataupun hitam.
Penelitian memperlihatkan bahwa kombinasi warna yang memberikan rentang paling lebaradalah red (R), green (G) dan blue (B). Ketiga warna tersebut merupakan warna pokok yang
biasa disebut RGB. Warna lain dapat diperoleh dengan mencampurkan ketiga warna pokoktersebut dengan perbandingan tertentu. Setiap warna pokok mempunyai intensitas sendiri dengan
nilai maksimum 255 (8-bit). Misal warna kuning merupakan kombinasi warna merah dan hijausehingga nilai RGB: 255 255 0.
RGB disebut juga ruang warna yang dapat divisualisasikan sebagai sebuah kubus, dengan tiga
sumbunya yang mewakili komponen warna merah (red) R, hijau (green) G, biru (blue) B. Salah
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 40/45
40
satu pojok alasnya yang Sistem Klasifikasi Jenis dan Kematangan Buah Tomat BerdasarkanBentuk dan Ukuran serta Warna Permukaan Kulit Buah Berbasis Pengolahan Citra Digital .
berlawanan menyatakan warna hitam ketika R = G = B = 0, sedangkan pojok atasnya yang
berlawanan menyatakan warna putih ketika R= G= B= 255 ( sistem warna 8 bit bagi setiap
komponennya ).
Spektrum warna terbagi menjadi 6 bagian : violet, biru, hijau, kuning, oranye, dan merah.Chromatik cahaya mengitari spectrum elektromagnetik dengan kecepatan antara 400-700 nm.
Tiga kuantitas dasar yang digunakan untuk mendeskripsikan kualitas dari sumber cahayachromatic: penyinaran (radiance), pencahayaan (luminance), dan kecerahan (brightness).
Radiance (penyinaran) adalah jumlah total energi yang berasal dari sumber cahaya dan diukurdalam watts (W). Luminance diukur dalam lumens(lm).
Cone(kerucut) adalah sensor pada mata yang bertanggung jawab untuk tampilan warna.Penelitian menjelaskan 6-7 milyar kerucut pada mata manusia dapat dibagi menjadi 3 prinsipkategori penyensoran secara kasar yaitu merah, hijau, dan biru. 65% pada cone sensitive pada
warna merah, 33% pada cahaya hijau, dan 2% pada cahaya biru ( tetapi cone biru adalah yang paling sensitive). Pada karaekteristik mata manusia warna terlihat sepaerti kombinasi warna
variable yang disebut warna primer, red(R), green(G), blue(B).
Warna primer dapat digunakan untuk menghasilkan untuk menghasilkan warna sekunder :Magenta (red+blue), Cyan (green+blue) dan Yellow (res+green). Mencampur 3 warna primer
atau sekunder dengan warna lawannya akan menghasilkan warna putih.
Perbedaan antara warna primer dari cahaya dan warna primer dari pigments atau colorantsadalah penting. Warna primer didefinisikan sebagai sebuah substract atau absorb dari warna primer dari cahaya dan mereflesikan atau mentransmisikan 2 lainnya. Sedangkan warna primer
dari pigments adalah magenta, cyan, dan yellow. Warna sekunder adalah merah, hijau, dan biru.
Karakteristik umumnya digunakan untuk membedakan satu warna dengan warna lainnya adalah brightness, hue, dan saturation. Brightness merupakan kandungan intensitas chromatic, hue
adalah atribut yang diasosiasikan dengan dominant wavelength. Hue dan saturation yangdigabung disebut chromaticity. Jumlah merah(R), green(G), dan blue(B) yang dibutuhkan untuk
menentukan warna disebut tristimulus value, yang dinotasikan X, Y, Z.
Warna dispesifikasikan oleh trichromatic koefisien yang didefinisikan sbb:
x=X/X+Y+Z
Color Models

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 41/45
41
Tujuan dari sebuah pemodelan warna adalah untuk memfasilitasi spesifikasi warna, model warnadigunakan untuk menspesifikasikan sebuah sistem koordinat 3D untuk representasi warna. Pada
digital image processing pemodelan berorientasi hardware biasanya dipakai dalam bentuk modelRGB (Red, Green, Blue) untuk monitor dan kamera video, model CMY (Cyan, Magenta,
Yellow) untuk printer warna, dan model HSI (Hue, Saturation, Intensity) yang mendekati cara
manusia menjabarkan dan menginterpretasikan warna.
Model RGB
Pada model ini, banyak system terbatas pada 256 warna walaupun 24-bit citra RGB tersedia.
Dari 256 warna tersebut, 40 warna diproses dengan cara yang berbeda oleh bermacam OS,sisanya tinggal 216 warna yang berlaku umum bagi semua sistem. 216 warna ini telah menjadi
standar de facto untuk safe colors, terutama untuk aplikasi internet. Setiap 216 warna ini terdiridari 3 komponen RGB, tapi masing-masing hanya boleh bernilai 0,51,102, 153, 204, 255 (lihat
tabel di bawah). Warna merah murni: FF0000, biru murni: 0000FF, hitam: 000000, putih:FFFFFF.
Model CMY dan CMYK
Asumsikan semua nilai warna dinormalisasi menjadi [0,1]. Model CMY digunakan untukmembuat output hardcopy. CMYK à K adalah warna keempat: hitam; karena CMY yang
dicampur tidak dapat menghasilkan warna hitam pekat, sedangkan seringkali kita harusmencetak dengan warna hitam pekat. Rumusan:
C = 1 – R
M = 1 – G
Y = 1 – B
Model HSI
RGB dan CMY tidak cocok untuk mendeskripsikan warna berdasarkan interpretasi manusia.Berasal dari kata Hue (H), Saturation (S), Intensitas (I), dimana Hue mendeskripsikan warna
murni, Saturasi mendeskripsikan derajat banyaknya warna murni dilunakkan dengan warna putih, dan Intensitas menggabungkan informasi warna dari H dan S. Semua titik pada bidang
yang dibatasi oleh titik black, white dan warna-x, memiliki hue yang sama, yaitu warna-x,contoh warna-x: cyan. Untuk menentukan saturasi (kemurnian) dari warna-x: buat bidang dari
titik warna-x tegak lurus dengan sumbu intensitas dan memiliki hue yang sama. Saturasi adalah jarak terdekat antara titik warna-x dengan sumbu intensitas.
II.2 The basics of color image, processing
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 42/45
42
Pendekatan untuk melakukan Full-Color Image Processing ada dua cara yaitu pertama denganmemproses masing-masing komponen gambar secara terpisah kemudian digabungkan menjadi
gambar gabungan yang berwarna sedangkan cara yang kedua kita mengerjakan pixel dari gambartersebut secara langsung.
II.2 Color Transformations (Perubahan Warna)
Color Transformation melakukan proses terhadap komponen sebuah gambar berwarna padakonteks model warna tunggal, yang tentunya berlawanan dengan konversi model-model warna
tersebut seperti ( RGB ke HSI atau sebaliknya). Metode-metode yang digunakan adalah :
Formulation
Untuk melakukan transformasi warna pada gambar kita membutuhkan formula-formula
tertentu. Sebagai contoh untuk melakukan transformasi warna kita menggunakan persamaan :
St = T1(r1.r2.....rn) i = 1,2,.....n
Dimana r dan s adalah variabel yang menampung komponen warna f(x,y) dan g(x,y) pada
sembarang titik (x,y), n adalah jumlah komponen warna dan {T1,T2,.....,Tn} adalahhimpunan dari fungsi-fungsi transformasi atau color mapping yang akan diberlakukan
pada r dan akan menghasilkan s.
Formula diatas akan menghasilkan proses komputasi yang berbeda-beda pada masing-
masing model warna (RGB, CMYK, HSI).
Color complements
Pada lingkaran warna, warna-warna yang saling berseberangan saling berlawanan antarasatu dengan yang lainnya dan dikenal dengan nama Color Complement . Metode berguna
untuk memperbaiki atau memperjelas detail yang terdapat pada wilayah gelap padasebuah gambar berwarna, terutama ketika bagian tersebut dominan.
Metode ini dapat dilihat pada konsep negative filem kamera konvensional. Warna merah pada gambar sebenarnya digatikan oleh cyan, ketika warna sebenarnya hitam
penggantinya adalah putih dan seterusnya. Setiap warna pada gambar complement dapat
diprediksikan denga menggunakan lingkaran warna.
Color Slicing
Menghighlight specific range dari warna pada gambar sangat berguna untuk memisahkanobjek dari sekitarnya.ide dasarnya itu (1) menampilkan warna yang paling mencolok
sehingga lebih menonjol dibanding backgroundnya. (2) gunakan daerah yangdigambarkan oleh warna sebagai mask untuk proses lebih lanjut
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 43/45
43
Pendekatan yang paling langsung adalah memperluas gray-level slicing technique darisection 3.2.4 karena pixel warna adalah n-dimensional quantity,bagaimanapun, hasil dari
fungsi transformasi warna lebih kompleks dari gray-scale counterparts
Salah satu cara simple untuk memecah-mecah warna pada gambar adalah dengan
memetakan warna-warna luar beberapa bagian yang menonjol dari warna netral yangtidak menonjol.
Koreksi tone dan warna
Transformasi warna dapat ditampilkan hampir pada smua desktop comp. dengan
sambungan digicam, flatbed scanner, printer, semua itu dapat membuat PC menjadi digidarkroom, memberikan penyesuaian tone dan perbaikan warna. Arus utama dari high end
color reproduction system ditampilkan tanpa butunya fasilitas tradisional „outfitted wet processing.
Warna dari monitor sebaiknya mewakilkan scara akurat apapun sumber image yg discan,sbagaimana hasil akhir printnya. Ini dapat dipenuhi dengan „alat independent colormodel‟. Kesuksesan dari pendekatan ini adalah fungsi dari kualitas „color profile‟ yg
digunakan untuk memetakan stiap alat ke model dan model itu sendiri. Pilihan modeluntuk banyak CMS adalah CIE L*a*b model, yg juga dikenal dengan naman CIELAB.
Komponen warna dari L*a*b* (L* =Lightness , a* untuk merah minus hijau, b* hijau
minus biru.). Prinsip yang menguntungkan dari imaging system yg terkalibrasi adalah pengizinan tonal dan color yg tidak seimbang untuk dibetulkan scara interaktif dan
independently, dalalm 2 operasi sekuel. masalah yg terliput dalam range image‟s tonalakan dibetulkan, sebelum memisahkan ketidakteraturan color, seperti over- dan under-
saturated colors. Tonal range dari sbuah image
Trasnformasi untuk memodifikasi image tones normalnya dipilih scr interaktif., ini
berarti pemetaan dari ketiga (ato keempat) komponen warna dengan fungsi transformasiyg sama, di HSI color area, hanyalah itensitas komponen yg dimodifikasi.
Histogram Processing
Gray-level histogram memproses transformasi dari section 3.3 dapat diterapkan ke
gambar berwarna dengan otomatis .memanggil kembali hasil histogram secara otomtismenentukan transformasi yang mencari hasil dari gambar dengan histogram yang sama
dari nilai intensitas. Pendekatan yang lebih logis adalah memisahkan intensitas warnasecara uniform, menyisakan warna tersebut dengan tidak merubahnya. Contohnya
ditunjukan pada HIS color space idealnya sesuai dengan pendekatan tipe ini.
Smoothing and Sharpening

7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 44/45
44
Smoothing & sharpening merupakan salah satu transformasi yang melibatkan hubungan suatu piksel dengan piksel tetangganya. Caranya sama dengan smoothing (averaging) dan sharpening
(Laplacian operator) pada citra monokrom, hanya saja filtering dilakukan pada vektor [R,G,B]
Color Image Smoothing
xy merupakan sekumpulan koordinat yang mendefinisikan sebuah neighborhood yang berpusat di ( x,y) dalam sebuah citra berwarna RGB. Rata – rata komponen vector –
vector RGB dalam neighborhood ini adalah
Kita mengenali komponen – komponen vector ini sebagai citra – citra scalar yang akandiperoleh dengan penghalusan secara bebas setiap bidang untuk mengawali citra RGB
dengan menggunakan proses tingkat keabuan neighborhood yang konvensional.Demikianlah, dapat kita simpulkan bahwa penghalusan dengan neighborhood averaging
dapat diselesaikan pada dasar tiap bidang berwarna. Hasilnya sama dengan ketika rata – rata dilakukan menggunakan vector – vector warna RGB.
5.8.2
7/25/2019 PCD Kelas a Hijra Hidayatullah
http://slidepdf.com/reader/full/pcd-kelas-a-hijra-hidayatullah 45/45
DAFTAR PUSTAKA
Richard,Steven. Digital image processing using MATLAB.Pearson. 2004
http://viplab.if.its.ac.id/pcd_online/Chapter%205.html