nota kuliah skmm 2323 mekanik bendalir ii -...
TRANSCRIPT

Nota Kuliah
SKMM 2323 Mekanik Bendalir II
Abu Hasan ABDULLAH

Nota Kuliah
SKMM 2323 Mekanik Bendalir IIAliran Lapisan Sempadan
Aliran Bendalir Unggul
Aliran Boleh Mampat Satu Dimensi
Pengenalan Kepada Mesin Bendalir
Abu Hasan ABDULLAH
Fakulti Kejuruteraan MekanikalUniversiti Teknologi Malaysia
©2015, 2003

Kandungan
Senarai Rajah viii
Senarai Jadual ix
Tatatanda x
1 ALIRAN LAPISAN SEMPADAN 1
1.1 Kelikatan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1 Hukum Kelikatan Newton . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2 Bendalir Newtonan . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Daya-daya yang Terbentuk oleh Bendalir
Bergerak . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Teori Lapisan Sempadan: Latarbelakang . . . . . . . . . . . . . . . . . . . . 4
1.3.1 Tebal lapisan sempadan . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.2 Tebal Anjakan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.3.3 Tebal Momentum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3.4 Tebal Tenaga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.4 Asas Analisis Aliran Lapisan Sempadan . . . . . . . . . . . . . . . . . . . . 7
1.4.1 Persamaan Keterusan Aliran Likat . . . . . . . . . . . . . . . . . . . 8
1.4.1.1 Persamaan Keterusan Untuk Koordinat Silinder . . . . . 9
1.4.2 Persamaan Momentum Aliran Likat . . . . . . . . . . . . . . . . . . 10
1.4.2.1 Persamaan Kamilan Momentum von Karman . . . . . . . 12
1.5 Penyelesaian Lapisan Sempadan Laminar . . . . . . . . . . . . . . . . . . . 14
1.5.1 Kaedah Tepat Blasius . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1.5.2 Kaedah Anggaran . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
1.6 Penyelesaian Lapisan Sempadan Gelora . . . . . . . . . . . . . . . . . . . . 19
1.6.1 Kaedah Hukum Kuasa . . . . . . . . . . . . . . . . . . . . . . . . . . 20
i

KANDUNGAN ii
2 ALIRAN BENDALIR UNGGUL 23
2.1 Gerakan Zarah-zarah Bendalir . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2 Jenis-jenis Garisan Aliran Bendalir . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.1 Garis Arus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.2 Garis laluan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.2.3 Garis upaya atau Garis Sama-upaya . . . . . . . . . . . . . . . . . . 25
2.3 Jenis-jenis Aliran Bendalir . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3.1 Aliran Laminar & Aliran Gelora . . . . . . . . . . . . . . . . . . . . 26
2.3.2 Aliran Berputar & Aliran Nirputaran . . . . . . . . . . . . . . . . . 26
2.4 Persamaan Keterusan 2-D Aliran Tak Likat . . . . . . . . . . . . . . . . . . 27
2.5 Persamaan Momentum 2-D Aliran Tak Likat . . . . . . . . . . . . . . . . . 28
2.6 Vortisiti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.7 Penentuan Aliran Berputar atau Sebaliknya . . . . . . . . . . . . . . . . . . 32
2.8 Edaran . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.9 Keupayaan Halaju . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.10 Fungsi Arus dan Kadar Aliran . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.11 Hubungan di Antara Fungsi Arus dan Keupayaan Halaju . . . . . . . . . . 36
2.12 Beberapa Pola Asas Aliran . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.12.1 Aliran garis lurus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.12.2 Aliran daripada sumber atau punca . . . . . . . . . . . . . . . . . . 39
2.12.3 Aliran ke sinki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.12.4 Vorteks nirputaran atau bebas . . . . . . . . . . . . . . . . . . . . . 40
2.12.5 Vorteks berputar atau paksa . . . . . . . . . . . . . . . . . . . . . . . 43
2.13 Gabungan Beberapa Pola Asas Aliran . . . . . . . . . . . . . . . . . . . . . 44
2.13.1 Aliran Garis Lurus Seragam dan Sumber . . . . . . . . . . . . . . . 44
2.13.2 Gabungan sumber dan sinki yang setanding kekuatan . . . . . . . 46
2.13.3 Sumber dan sinki yang setanding kekuatan digabungkan dengan
aliran garis lurus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.13.4 Kembar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
2.13.5 Kembar dan Aliran Garis lurus Seragam . . . . . . . . . . . . . . . 48
3 ALIRAN BOLEHMAMPAT SATUDIMENSI 50
3.1 Bendalir Tak Boleh Mampat dan Boleh Mampat . . . . . . . . . . . . . . . 50
3.1.1 Haba Tentu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50

KANDUNGAN iii
3.1.2 Persamaan Keadaan Gas Sempurna . . . . . . . . . . . . . . . . . . 51
3.1.3 Proses-proses Termodinamik Gas Sempurna . . . . . . . . . . . . . 51
3.2 Kebolehmampatan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.3 Beberapa Konsep Asas Termodinamik . . . . . . . . . . . . . . . . . . . . . 54
3.3.1 Proses Bolehbalik dan Tak Bolehbalik . . . . . . . . . . . . . . . . . 54
3.3.2 Tenaga Dalaman dan Entalpi . . . . . . . . . . . . . . . . . . . . . . 54
3.3.3 Hukum Pertama Termodinamik . . . . . . . . . . . . . . . . . . . . 54
3.3.4 Entropi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.3.5 Hukum Kedua Termodinamik . . . . . . . . . . . . . . . . . . . . . 56
3.4 Parameter yang Mengawal Aliran Boleh Mampat . . . . . . . . . . . . . . 56
3.5 Regim-regim Aliran Boleh Mampat . . . . . . . . . . . . . . . . . . . . . . . 57
3.6 Kon Mach, Garis Mach dan Gelombang Kejutan . . . . . . . . . . . . . . . 58
3.7 Persamaan-persamaan Menakluk Aliran Boleh Mampat . . . . . . . . . . . 59
3.7.1 Persamaan keadaan . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.7.2 Persamaan keterusan . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.7.3 Persamaan momentum (Persamaan Euler) . . . . . . . . . . . . . . 60
3.7.4 Persamaan tenaga . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
3.8 Pembolehubah Aliran dalam Sebutan Nombor Mach . . . . . . . . . . . . 63
3.9 Titik Genangan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.9.1 Aliran isentropik gas sempurna . . . . . . . . . . . . . . . . . . . . 65
3.9.2 Keadaan-keadaan genting . . . . . . . . . . . . . . . . . . . . . . . . 66
3.10 Aliran Menerusi Salur yang Berubah Luas . . . . . . . . . . . . . . . . . . . 66
3.10.1 Aliran Isentropik Menerusi Nozel Menumpu . . . . . . . . . . . . . 68
3.10.2 Aliran Isentropik Menerusi Nozel Menumpu-Mencapah . . . . . . 70
3.11 Kejutan Normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
3.11.1 Persamaan keterusan . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.11.2 Persamaan momentum . . . . . . . . . . . . . . . . . . . . . . . . . 73
3.11.3 Persamaan tenaga . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74
3.11.4 Kekuatan kejutan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
4 PENGENALANKEPADAMESIN BENDALIR 76
4.1 Pengkelasan Mesin Hidraulik . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.1.1 Kriteria Pengkelasan . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
4.1.1.1 Arah Pemindahan Tenaga . . . . . . . . . . . . . . . . . . 77

KANDUNGAN iv
4.1.1.2 Jenis Tindakan Mesin . . . . . . . . . . . . . . . . . . . . . 77
4.2 Analisis Dimensi dan Hukum Keserupaan untuk Mesin Bendalir Tak Bo-
leh Mampat . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
4.2.1 Prestasi Mesin Hidraulik . . . . . . . . . . . . . . . . . . . . . . . . 80
4.2.1.1 Turbin Hidraulik . . . . . . . . . . . . . . . . . . . . . . . . 80
4.2.1.2 Pam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.2.2 Laju Tentu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.2.2.1 Pam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
4.2.2.2 Turbin Hidraulik . . . . . . . . . . . . . . . . . . . . . . . . 82
4.3 Analisis Dimensi Untuk Mesin Rotodinamik Aliran Boleh Mampat . . . . 83
4.3.1 Kesan mampatan ke atas analisis dimensi . . . . . . . . . . . . . . . 85
4.4 Pam Rotodinamik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.4.1 Pengkelasan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
4.4.2 Turus Pam . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.4.2.1 Turus Statik . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
4.4.2.2 Turus Sebenar atau Turus Keseluruhan . . . . . . . . . . . 88
4.4.2.3 Turus Manometrik . . . . . . . . . . . . . . . . . . . . . . . 89
4.4.3 Pam Aliran Jejari . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 92
4.4.3.1 Teori Aliran Dua Dimensi . . . . . . . . . . . . . . . . . . 92
4.4.3.2 Ukuran Prestasi . . . . . . . . . . . . . . . . . . . . . . . . 99
4.4.3.3 Perubahan Turus pada Pendesak dengan Bentuk Bilah . . 102
4.4.4 Pam Aliran Paksi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
4.4.4.1 Teori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
4.4.4.2 Gerakan Vorteks dan Hubungannya dengan Rekabentuk
Mesin-mesin Aliran Paksi . . . . . . . . . . . . . . . . . . 107
4.4.4.3 Darjah Tindakbalas . . . . . . . . . . . . . . . . . . . . . . 108
4.4.5 Peronggaan di dalam Pam Rotodinamik . . . . . . . . . . . . . . . 109
4.5 Turbin Hidraulik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.5.1 Pengkelasan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111
4.5.1.1 Turbin Dedenyut . . . . . . . . . . . . . . . . . . . . . . . . 111
4.5.1.2 Turbin Tindakbalas . . . . . . . . . . . . . . . . . . . . . . 111
4.5.2 Roda Pelton . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.5.2.1 Teori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 113
4.5.2.2 Ukuran Prestasi . . . . . . . . . . . . . . . . . . . . . . . . 116

KANDUNGAN v
4.5.3 Turbin Francis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
4.5.3.1 Teori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
4.5.3.2 Ukuran Prestasi . . . . . . . . . . . . . . . . . . . . . . . . 122
4.5.4 Turbin Kaplan . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
4.5.4.1 Teori . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
4.5.4.2 Ukuran Prestasi . . . . . . . . . . . . . . . . . . . . . . . . 126
4.5.5 Peronggaan di dalam Turbin Hidraulik . . . . . . . . . . . . . . . . 128
A Aliran Likat Dua Dimensi 130
A.1 Persamaan Keterusan Aliran Likat 2-Dimensi . . . . . . . . . . . . . . . . . 130
A.2 Persamaan Momentum Aliran Likat 2-Dimensi . . . . . . . . . . . . . . . . 131
A.2.1 Persamaan Navier-Stokes Aliran Likat 2-Dimensi . . . . . . . . . . 134
Bibliografi 135

Senarai Rajah
1.1 Daya-daya yang terbentuk oleh bendalir bergerak, Douglas et al. (2001). . 2
1.2 Daya-daya yang memberikan hela tekanan dan hela geseran kulit, Dou-
glas et al. (2001). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.3 Komponen-komponen utama hela susuk, Douglas et al. (2001). . . . . . . . 4
1.4 Lapisan sempadan di atas plat rate, Massey (1983). . . . . . . . . . . . . . . 5
1.5 Tebal anjakan. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.6 Tebal momentum. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.7 Tebal tenaga. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.8 Keterusan dalam tiga dimensi. . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.9 Isipadu kawalan untuk suatu lapisan sempadan, Potter & Wiggert (1997). 13
1.10 Susuk halaju laminar dan gelora. . . . . . . . . . . . . . . . . . . . . . . . . 16
1.11 Perubahan halaju dengan masa. . . . . . . . . . . . . . . . . . . . . . . . . 20
2.1 Garisarus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.2 Tiub arus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.4 Garis upaya atau sama-upaya. . . . . . . . . . . . . . . . . . . . . . . . . . 25
2.3 Garis laluan. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.5 Aliran laminar dan aliran gelora. . . . . . . . . . . . . . . . . . . . . . . . . 26
2.6 Aliran berputar, dan aliran nirputaran. . . . . . . . . . . . . . . . . . . . . . 27
2.7 Aliran jisim menerusi suatu unsur bendalir. . . . . . . . . . . . . . . . . . 27
2.8 Imbangan daya tekanan ke atas unsur bendalir . . . . . . . . . . . . . . . 28
2.9 Gerakan-gerakan unsur bendalir. . . . . . . . . . . . . . . . . . . . . . . . . 30
2.10 Putaran, peralihan dan herotan. . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.11 Edaran. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.12 Fungsi arus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.13 Jaringan aliran, Massey (1983). . . . . . . . . . . . . . . . . . . . . . . . . . 37
vi
SENARAI RAJAH vii
2.14 Aliran garis lurus. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
2.15 Aliran sumber. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.16 Unsur bendalir dalam medan vorteks bebas. . . . . . . . . . . . . . . . . . 41
2.17 Unsur bendalir dalam medan vorteks bebas. . . . . . . . . . . . . . . . . . 42
2.18 Vorteks paksa sekitar paksi tegak terbentuk di dalam cecair yang mengisi
bekas terbuka, Massey (1983). . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.19 Gabungan aliran garis lurus dan sumber, Massey (1983). . . . . . . . . . . 45
2.20 Gabungan sumber, A, dan sinki, B, yang setanding kekuatan, Massey (1983). 46
2.21 Sumber dan sinki yang setanding kekuatan digabungkan dengan aliran
garis lurus, Massey (1983). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.22 Kembar dan aliran garis lurus seragam, Massey (1983). . . . . . . . . . . . 48
3.1 Kon Mach, Fox & McDonald (1985). . . . . . . . . . . . . . . . . . . . . . . 59
3.2 Perubahan halaju dan tekanan dengan luas bagi aliran subsonik dan su-
personik, John (1969). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
3.3 Aliran gas menerusi nozel menumpu, John (1969). . . . . . . . . . . . . . 69
3.4 Kadar aliran jisim menerusi nozel menumpu, John (1969). . . . . . . . . . 70
3.5 Aliran gas menerusi nozel menumpu-mencapah, John (1969). . . . . . . . 71
3.6 Kadar aliran jisim menerusi nozel menumpu-mencapah, John (1969). . . 71
4.1 Pengkelasan mesin-mesin bendalir. . . . . . . . . . . . . . . . . . . . . . . . 76
4.2 Beberapa contoh pam sesaran positif. . . . . . . . . . . . . . . . . . . . . . 78
4.3 Lengkung-lengkung prestasi turbin hidraulik, Massey (1983). . . . . . . . 80
4.4 Lengkung-lengkung prestasi pam rotodinamik, Massey (1983). . . . . . . 82
4.5 Kecekapan melawan laju tentu untuk mesin bendalir, Douglas et al. (1985). 83
4.6 Pengaruh laju tentu ke atas bentuk pemutar, Turton (1984). . . . . . . . . . 84
4.7 Perubahan adiabatik unggul di dalam keadaan-keadaan genangan meren-
tasi mesinturbo, Dixon (1978). . . . . . . . . . . . . . . . . . . . . . . . . . . 86
4.8 Pam rotodinamik—(a) pam aliran jejari, (b) pam aliran tercampur dan (c)
pam aliran paksi, Turton (1984). . . . . . . . . . . . . . . . . . . . . . . . . 87
4.9 Turus-turus pam. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
4.10 Keluaran pam aliran jejari—(a) ruang tanpa bilah dengan volut dan (b)
ruang tanpa bilah dengan keluaran terlata, Massey (1983). . . . . . . . . . 92
4.11 Vektor halaju dalam tiga dimensi. . . . . . . . . . . . . . . . . . . . . . . . . 93
4.12 Segitiga halaju pam aliran jejari pada masukan dan keluaran. . . . . . . . 95
4.13 Aliran 3-dimensi di dalam pam empar, Douglas et al. (1985). . . . . . . . . 96

SENARAI RAJAH viii
4.14 Gelinciran di keluaran bilah pemutar. . . . . . . . . . . . . . . . . . . . . . 97
4.15 Pusingan relatif di dalam laluan bilah, Douglas et al. (1985). . . . . . . . . 98
4.16 Bocoran di dalam pam empar, Massey (1983). . . . . . . . . . . . . . . . . . 100
4.17 Keratan rentas pemasangan pam empar, Turton (1984). . . . . . . . . . . . 101
4.18 Kesan bentuk bilah ke atas turus. . . . . . . . . . . . . . . . . . . . . . . . . 104
4.19 Pendesak pam aliran paksi, Douglas et al. (1985). . . . . . . . . . . . . . . . 104
4.20 Segitiga halaju pam aliran paksi. . . . . . . . . . . . . . . . . . . . . . . . . 105
4.21 Kilasan bilah pendesak pam aliran paksi, Turton (1984). . . . . . . . . . . . 107
4.22 Pengaruh tindakbalas ke atas segitiga halaju pam aliran paksi. . . . . . . . 109
4.23 Turbin hidraulik. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112
4.24 Susunan turbin aliran melintang. . . . . . . . . . . . . . . . . . . . . . . . . 113
4.25 Komponen-komponen penting roda Pelton—(a) roda, (b) nozel dan injap
tombak dan (c) pemantul. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.26 Roda Pelton dengan dua nozel. . . . . . . . . . . . . . . . . . . . . . . . . . 115
4.27 Segitiga halaju roda Pelton, Douglas et al. (1985). . . . . . . . . . . . . . . . 115
4.28 Susunan turbin Francis aci tegak dan mendatar. . . . . . . . . . . . . . . . 119
4.29 Laluan bendalir menerusi turbin Francis. . . . . . . . . . . . . . . . . . . . 119
4.30 Segitiga halaju turbin Francis, Rattan (1994). . . . . . . . . . . . . . . . . . 121
4.31 Pemutar turbin aliran paksi. . . . . . . . . . . . . . . . . . . . . . . . . . . . 124
4.32 Laluan bendalir menerusi turbin Kaplan. . . . . . . . . . . . . . . . . . . . 125
4.33 Segitiga halaju turbin aliran paksi. . . . . . . . . . . . . . . . . . . . . . . . 126
A.1 Aliran jisim menerusi suatu unsur bendalir. . . . . . . . . . . . . . . . . . 130
A.2 Unsur segiempat bendalir. . . . . . . . . . . . . . . . . . . . . . . . . . . . 131

Senarai Jadual
1.1 Fungsi f (η) untuk lapisan sempadan laminar sepanjang suatu plat rata
pada incidence sifar. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.1 Modulus pukal air dan udara. . . . . . . . . . . . . . . . . . . . . . . . . . 53
4.1 Perubahan pekali bilah, µ, dengan bilangan bilah, z, bagi pam aliran jejari 99
4.2 Bilangan bilah dan turus untuk turbin Kaplan . . . . . . . . . . . . . . . . 128
ix

Tatatanda
A luas aliran
a laju bunyi, pecutan
b lebar bilah atau laluan bilah
C pemalar
Cp pekali pemulihan tekanan
cp haba tentu pada tekanan malar
cv haba tentu pada isipadu malar, pekali halaju
Dh diameter hidraulik, faktor resapan
d diameter
ds diameter tentu
Fr nombor Froude
F daya
f pekali geseran, sebarang fungsi
H turus
h entalpi, pekali pemindahan haba permukaan
K pemalar
L panjang, panjang hidraulik
l panjang
lm panjang percampuran
M nombor Mach mutlak, berat molekular
m jisim
m kadar aliran jisim
N laju putaran
n eksponen politropik, arah normal
Ns laju tentu
P kuasa
Pr nombor Prandtl
p tekanan, titik di dalam satu ruang
Q kadar aliran isipadu, tenaga haba
R darjah tindakbalas
R pemalar gas
Ro pemalar gas universal
Re nombor Reynolds
Rn nombor Richardson
r radius
x

TATATANDA xi
s entropi
T suhu, dayakilas
t masa, tebal bilah
U laju linear bilah
V halaju mutlak bendalir
Vf halaju aliran
Vm komponen meridional halaju mutlak bendalir
Vr komponen radius halaju mutlak
Vt komponen tangen halaju mutlak
Vx komponen paksi halaju mutlak
Vslip halaju geliciran
V isipadu
W halaju relatif
Z bilangan bilah, panjang (dalam arah) paksi
z daya angkat statik
Huruf Yunani
α sudut mutlak aliran
β sudut relatif aliran
γ nisbah haba tentu, sudut
∆ perubahan terhingga
δ∗ ketebalan lapisan sempadan
η kecekapan
θ sudut pantulan roda Pelton, kadar aliran jisim tanpa dimensi
κ modulus pukal
µ kelikatan dinamik, faktor gelinciran, pekali bilah
ν kelikatan kinematik, nisbah diameter (hab/hujung)
ρ ketumpatan
Σ jumlah
σ fungsi perolehan entropi (=e−∆s/R), pekali peronggaan
τ tegasan ricih
φ pekali aliran, pekali halaju, sudut lentuk (camber)
fungsi keupayaan halaju
ψ pekali pembebanan bilah, sudut azimut, sudut kon
fungsi arus
Ω laju sudut, faktor pengenduran, frekuensi resonans Helmholtz
Subskrip
c keadaan tersendat, kritikal
h hab
m komponen meridional, arah meridional
min minimum
N nozel
n arah normal

TATATANDA xii
o keluaran
opt optimum
p politropik, tekanan
R pangkal
r komponen radial, arah radial, nisbah
rms punca kuasa dua min (root mean square)
t komponen tangen, arah lilitan
ts total ke statik
tt total ke total
x,y,z sebarang koordinat cartesan
θ arah lilitan
0 masukan bilah pandu turbin
1 keluaran bilah pandu turbin, masukan pam/turbin
2 keluaran pam/turbin, masukan pembaur pam atau tiub draf turbin
3 keluaran tiub draf
Bab 1
ALIRAN LAPISAN SEMPADAN
1.1 Kelikatan
Kelikatan adalah sifat bendalir yang mengawal kadar alirannya. Ia terjadi disebabkan
oleh cohesion yang wujud di antara zarah-zarah bendalir yang boleh diperhatikan ketika
bendalir (cecair terutamanya) mengalir. Dalam mengkaji kesan kelikatan, dua anggapan
berikut perlu dibuat:
1. Tidak wujud gerakan relatif di antara bendalir dan sempadan pepejal apabila ben-
dalir bersentuhan dengan jasad pepejal. Zarah-zarah bendalir di dalam lapisan
yang bersebelahan bergerak dengan halaju sempadan pepejal; sekiranya jasad pe-
pejal itu pegun, maka halaju zarah-zarah di dalam lapisan sempadan yang berse-
belahan dengannya adalah sifar dan ini disebut keadaan tanpa geliciran.
2. Tegasan ricih di antara dua lapisan bendalir yang bersebelahan berkadaran terus
dengan kadar terikan ricih di dalam arah yang berserenjang dengan gerakan, iaitu
jika dua lapisan bersebelahan bergerak dengan halaju relatif, u, maka kadar terikan
ricih ialah u/y:
τ ∝u
y
Kadar tegasan ricih di antara dua lapisan bendalir yang bersebelahan juga berka-
daran dengan u/y, dengan y ialah jarak di antara kedua-dua lapisan.
1.1.1 Hukum Kelikatan Newton
Tegasan ricih, τ, ke atas sesuatu lapisan suatu bendalir adalah berkadaran terus dengan
kadar terikan ricih, u/y. Secara matematik,
τ ∝u
y
= µu
y(1.1a)
1

BAB 1. ALIRAN LAPISAN SEMPADAN 2
dengan u/y ialah kadar terikan ricih (atau kecerunan halaju) dan µ [kg/(s m2)] ialah
pemalar kekadaran yang dikenali sebagai pekali kelikatan (atau pekali kelikatan mutlak,
atau pekali kelikatan dinamik).
1.1.2 Bendalir Newtonan
Persamaan (1.1a) lazimnya ditulis dalam bentuk kebezaan,
τ = µdu
dy(1.1b)
Bendalir yang mematuhi hukum ini dikelaskan sebagai bendalir Newtonan.
1.2 Daya-daya yang Terbentuk oleh Bendalir
Bergerak
Rajah 1.1: Daya-daya yang terbentuk oleh bendalir bergerak, Douglas et al. (2001).
1. Daya Angkat, FLDaya angkat adalah komponen daya paduan yang dikenakan oleh sesuatu bendalir
ke atas suatu jasad yang berserenjang dengan gerakan relatif bendalir
FL = CL × 12ρU2
∞A (1.2)
dengan CL adalah pekali angkat.
2. Hela atau Daya Seret, FDHela adalah komponen daya paduan yang dikenakan oleh sesuatu bendalir ke atas
suatu jasad yang selari dengan gerakan relatif bendalir.
Hela ke atas sesuatu jasad yang bergerakmenerusi sesuatu bendalir terdiri dari dua
komponen:

BAB 1. ALIRAN LAPISAN SEMPADAN 3
• hela geseran kulit, FF, dan
• hela bentuk atau hela tekanan, FP.
Rajah 1.2: Daya-daya yang memberikan hela tekanan dan hela geseran kulit, Douglas
et al. (2001).
Hela geseran kulit, FF, bergantung kepada daya-daya ricih yang bertindak di anta-
ramuka pepejal–bendalir, Rajah 1.2,
FF =∮
τ0 sin θ ds (1.3)
Sementara itu hela tekanan, FP, yang juga dikenali sebagai hela bentuk, bergantung
kepada taburan tekanan di sekeliling jasad, rujuk Rajah 1.2,
FP =∮
ps cos θ ds (1.4)
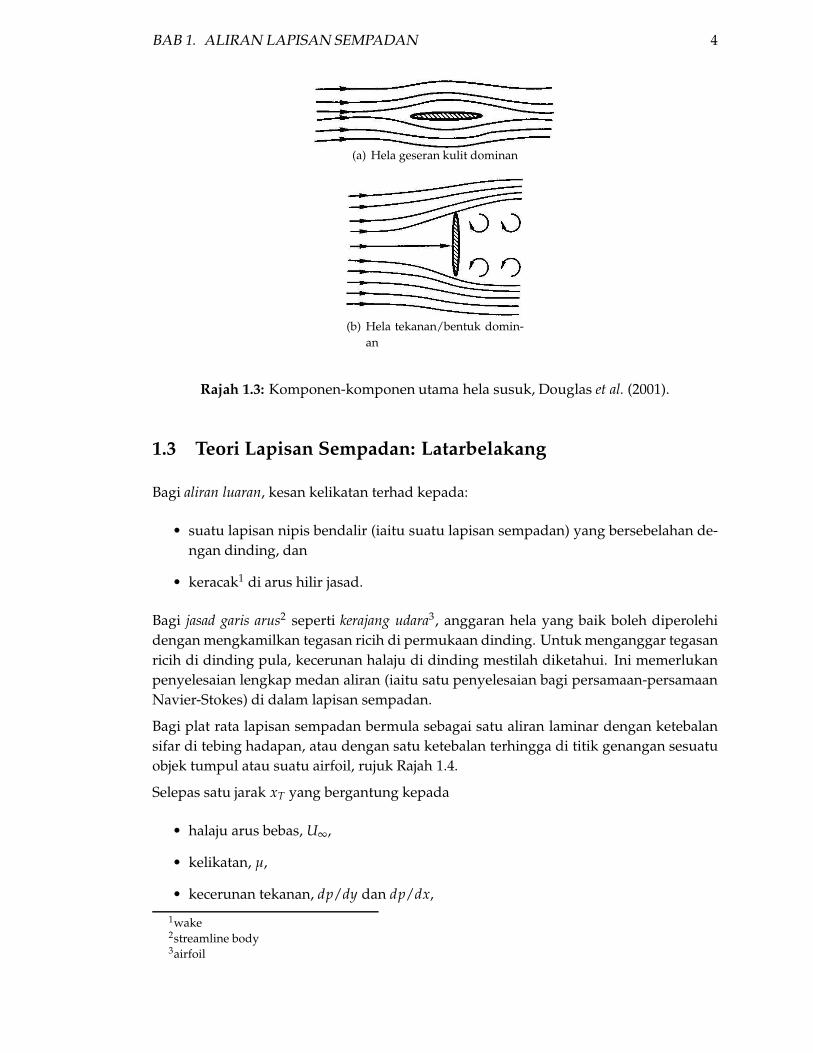
Jarang sekali kedua-dua komponen hela ini menjadi dominan secara serentak di
dalam sesuatu fenomena aliran. Untuk objek yang tidak menunjukkan kesan daya
angkat, kesan hela geseran kulit terlalu kecil, Rajah 1.3, dan biasanya diabaikan.
Gabungan hela geseran kulit dan hela bentuk atau hela tekanan dikenali juga seba-
gai hela susuk atau hela profail, FD. Jadi
FD =(
FF + FP
)
= CD × 12ρU2
∞A (1.5)
dengan CD adalah pekali hela dan A ialah luas jasad yang terunjur di atas satah yang
serenjang terhadap arah relatif gerakan.
Apabila jasad yang tenggelam di dalam aliran turut menghasilkan daya angkat,
hela teraruh berlaku.
BAB 1. ALIRAN LAPISAN SEMPADAN 4
(a) Hela geseran kulit dominan
(b) Hela tekanan/bentuk domin-
an
Rajah 1.3: Komponen-komponen utama hela susuk, Douglas et al. (2001).
1.3 Teori Lapisan Sempadan: Latarbelakang
Bagi aliran luaran, kesan kelikatan terhad kepada:
• suatu lapisan nipis bendalir (iaitu suatu lapisan sempadan) yang bersebelahan de-
ngan dinding, dan
• keracak1 di arus hilir jasad.
Bagi jasad garis arus2 seperti kerajang udara3, anggaran hela yang baik boleh diperolehi
denganmengkamilkan tegasan ricih di permukaan dinding. Untukmenganggar tegasan
ricih di dinding pula, kecerunan halaju di dinding mestilah diketahui. Ini memerlukan
penyelesaian lengkap medan aliran (iaitu satu penyelesaian bagi persamaan-persamaan
Navier-Stokes) di dalam lapisan sempadan.
Bagi plat rata lapisan sempadan bermula sebagai satu aliran laminar dengan ketebalan
sifar di tebing hadapan, atau dengan satu ketebalan terhingga di titik genangan sesuatu
objek tumpul atau suatu airfoil, rujuk Rajah 1.4.
Selepas satu jarak xT yang bergantung kepada
• halaju arus bebas, U∞,
• kelikatan, µ,
• kecerunan tekanan, dp/dy dan dp/dx,
1wake2streamline body3airfoil

BAB 1. ALIRAN LAPISAN SEMPADAN 5
Rajah 1.4: Lapisan sempadan di atas plat rate, Massey (1983).
• kekasaran dinding ǫ, dan
• tahap turun-naik arus bebas√u2/U∞,
aliran laminar ini akan mengalami suatu proses peralihan yang menyebabkan (selepas
suatu jarak pendek) aliran menjadi bergelora.
1.3.1 Tebal lapisan sempadan
Tebal lapisan sempadan, δ, ialah jarak tegaklurus terhadap permukaan badan tegar yang
diukur daripada permukaan badan ke bahagian aliran yang mempunyai halaju sama
dengan 99% halaju aliran arus bebas, rujuk Rajah 1.4.
1.3.2 Tebal Anjakan
Daya likat di dalam lapisan sempadan merencatkan aliran, jadi kadar aliran jisim yang
bersebelahan dengan permukaan pejal adalah lebih kecil dari kadar aliran jisim yang
mengaliri kawasan yang sama sekiranya lapisan sempadan tidak wujud.
• Kesusutan kadar aliran disebabkan oleh kesan daya likat ialah∫ ∞
0 ρ(U − u).
• Sekiranya lapisan sempadan tidak wujud, halaju di keratan rentas ini ialah U. Jika
sempadan pejal disesar sejauh δ∗, kadar aliran jisim akanmengalami kurangan atau
defisit sejumlah ρUδ∗.
Tebal anjakan, δ∗, ialah jarak yang mana sempadan pejal harus disesarkan dalam suatu
aliran tanpa geseran untuk memberikan kurangan kadar aliran jisim yang sama seperti
yang wujud di dalam lapisan sempadan;
ρU∞δ∗ =∫ ∞
0ρ(U∞ − u)dy (1.6)

BAB 1. ALIRAN LAPISAN SEMPADAN 6
Untuk aliran tak boleh mampat, ρ = pemalar dan
δ∗ =∫ ∞
0
(
1− u
U∞
)
dy (1.7)
≈∫ δ
0
(
1− u
U∞
)
dy (1.8)
Rajah 1.5: Tebal anjakan.
1.3.3 Tebal Momentum
Rencatan aliran di dalam lapisan sempadan juga menyebabkan pengurangan dalam
fluks momentum di keratan yang sepadan dengan aliran tak likat.
• Kurangan atau defisit momentum aliran jisim sebenar,∫ ∞
0 ρ u dy, menerusi lapisan
sempadan ialah∫ ∞
0 ρ u(U − u) dy.
• Sekiranya daya likat tidak wujud, sempadan pejal perlu di gerakkan sejarak θ un-
tuk menghasilkan kurangan momentum ρU2∞θ.
Tebal momentum, θ, ditakrifkan sebagai ketebalan satu lapis bendalir dengan halaju U∞
untuknya menghasilkan fluks momentum sebesar fluks momentum menerusi lapisan
sempadan;
ρU2∞θ =
∫ ∞
0ρu(U∞ − u)dy (1.9)
Untuk aliran tak boleh mampat, ρ = pemalar dan
θ =∫ ∞
0
u
U∞
(
1− u
U∞
)
dy (1.10)
≈∫ δ
0
u
U∞
(
1− u
U∞
)
dy (1.11)
(1.12)

BAB 1. ALIRAN LAPISAN SEMPADAN 7
Rajah 1.6: Tebal momentum.
1.3.4 Tebal Tenaga
Tebal tenaga, δ∗∗, ialah tebalnya bendalir diukur tegaklurus terhadap permukaan badan
tegar dan mempunyai fluks tenaga kinetik yang sama dengan tenaga kinetik yang hilang
akibat terbentuknya lapisan sempadan
δ∗∗ =∫ δ
0
ρu
ρ1U∞
[
1−(
u
U∞
)2]
dy (1.13)
Rajah 1.7: Tebal tenaga.
1.4 Asas Analisis Aliran Lapisan Sempadan
Di dalam lapisan sempadan, halaju susut daripada u = 0.99U∞ di y = δ ke u = 0 di
y = 0. Kesusutan yang berlaku dalam jarak yang sebegitu pendek membolehkan kita
menganggar susuk halaju, untuk aliran laminar dan gelora, dengan ketepatan yang baik.
Jika susuk halaju dianggap sebagai sudah diketahui,
1. persamaan keterusan, dan

BAB 1. ALIRAN LAPISAN SEMPADAN 8
2. persamaan momentum
akan dapat membantu kita meramal ketebalan lapisan sempadan dan tegasan ricih di
sempadan pepejal dan seterusnya daya geseran kulit.
Berikut ditunjukkan bagaimana kedua-dua persamaan ini diterbitkan bagi aliran likat di
dalam lapisan sempadan.
1.4.1 Persamaan Keterusan Aliran Likat
Isipadu kawalan ABCDEFGHdi dalam Rajah 1.8 di ambil dalam bentuk satu prisma segi
empat kecil dengan tepian dx, dy dan dz. Nilai-nilai min komponen halaju dalam arah x,
y dan z, masing-masing ialah u, v dan w.
Rajah 1.8: Keterusan dalam tiga dimensi.
Pertimbangkan aliran dalam arah-x,
Aliran jisim yang masuk menerusi ABCD per unit masa
= ρ u dy dz
Ketumpatan jisim ρ dan halaju u berubah dalam arah-x
Aliran jisim yang keluar menerusi EFGH per unit masa
=[
ρu +∂
∂x(ρu)dx
]
dy dz
Jadi
Aliran jisim bersih yang keluar per unit masa dalam arah-x
=∂
∂x(ρu)dx dy dz
begitu juga
Aliran jisim bersih yang keluar per unit masa dalam arah-y
=∂
∂y(ρv)dx dy dz

BAB 1. ALIRAN LAPISAN SEMPADAN 9
dan
Aliran jisim bersih yang keluar per unit masa dalam arah-z
=∂
∂z(ρw)dx dy dz
Oleh itu
Jumlah aliran jisim per unit masa
=
[∂
∂x(ρu) +
∂
∂y(ρv) +
∂
∂z(ρw)
]
dx dy dz
Di samping itu, ∂ρ/∂t adalah perubahan dalam ketumpatan jisim per unit masa,
Perubahan jisim di dalam isipadu kawalan per unit masa
= −∂ρ
∂tdx dy dz
Samakan
Jumlah aliran jisim per unit masa
= Perubahan jisim di dalam isipadu kawalan per unit masa
iaitu[
∂
∂x(ρu) +
∂
∂y(ρv) +
∂
∂z(ρw)
]
dx dy dz = −∂ρ
∂tdx dy dz
atau
∂
∂x(ρu) +
∂
∂y(ρv) +
∂
∂z(ρw) = −∂ρ
∂t(1.14)
Persamaan (1.14) boleh digunakan di sebarang titik di dalam aliran bendalir, samada
mantap atau tidak, boleh mampat atau tak boleh mampat. Bagi aliran tak boleh mampat,
ketumpatan ρ adalah malar dan persamaan (1.14) dipermudahkan menjadi
∂u
∂x+
∂v
∂y+
∂w
∂z= 0 (1.15)
Bagi analisis dalam dua dimensi, semua komponen dalam arah-z diabaikan, jadi
∂u
∂x+
∂v
∂y= 0 (1.16)
1.4.1.1 Persamaan Keterusan Untuk Koordinat Silinder
Persamaan keterusan untuk sesuatu sistem koordinat silinder r, θ dan z, dengan r dan θ
diukur dalam satah yang sepadan dengan satah x–y bagi koordinat Cartesan, boleh di-
terbitkan menerusi hubungan-hubungan di antara koordinat kutub dan koordinat Car-
tesan:
r2 = x2 + y2y
x= tan θ

BAB 1. ALIRAN LAPISAN SEMPADAN 10
u = vr cos θ − vt sin θ v = vr sin θ + vt cos θ
∂
∂x=
∂
∂r
∂r
∂x+
∂
∂θ
∂θ
∂x
∂
∂y=
∂
∂r
∂r
∂y+
∂
∂θ
∂θ
∂y
Ini menjadikan persamaan (1.15)
1
r
[∂
∂r(rvr)
]
+1
r
∂vt∂θ
+∂w
∂z= 0 (1.17)
1.4.2 Persamaan Momentum Aliran Likat
Persamaan keterusan dalam bentuk kebezaan, persamaan (1.14), boleh diolah semula
sebagai
∂ρ
∂t+
∂
∂x(ρu) +
∂
∂y(ρv) +
∂
∂z(ρw) = 0 (1.18)
Pecutan keseluruhan dalam arah-x boleh ditulis sebagai
du
dt=
∂u
∂t+ u
∂u
∂x+ v
∂u
∂y+ w
∂u
∂z(1.19)
Kadar perubahan momentum dalam arah-x boleh ditulis sebagai
∂Mx
dt= ρ dx dy dz
( ∂u
∂t+ u
∂u
∂x+ v
∂u
∂y+ w
∂u
∂z
)
(1.20)
Daya bersih dalam arah-x yang terdiri dari paduan daya jasad, tegasan normal dan te-
gasan ricih ke atas unsur bendalir ialah
∑ Fx = dx dy dz(
ρX − ∂σx∂x
+∂τyx
∂y+
∂τzx∂z
)
(1.21)
dengan X adalah daya jasad.
Oleh itu dari persamaan-persamaan (1.20) dan (1.21), bentuk umum persamaan momen-
tum dalam setiap dimensi boleh ditulis sebagai
ρ(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y+ w
∂u
∂y
)
︸ ︷︷ ︸
daya inersia=max
= ρX − ∂σx∂x
+∂τyx
∂y+
∂τzx∂z
︸ ︷︷ ︸
∑ Fx
(1.22)
ρ(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y+ w
∂v
∂z
)
︸ ︷︷ ︸
daya inersia=may
= ρY +∂τxy
∂x− ∂σy
∂y+
∂τzy
∂z︸ ︷︷ ︸
∑ Fy
(1.23)
ρ(∂w
∂t+ u
∂w
∂x+ v
∂w
∂y+ w
∂w
∂z
)
︸ ︷︷ ︸
daya inersia=maz
= ρZ +∂τxz∂x
+∂τyz
∂y− ∂σz
∂z︸ ︷︷ ︸
∑ Fz
(1.24)

BAB 1. ALIRAN LAPISAN SEMPADAN 11
Dalam sebutan inersia, kadar-kadar perubahan halaju dengan kedudukan, iaitu(
u∂u
∂x+ v
∂u
∂y+ w
∂u
∂y
)
,
(
u∂v
∂x+ v
∂v
∂y+ w
∂v
∂z
)
dan
(
u∂w
∂x+ v
∂w
∂y+ w
∂w
∂z
)
disebut pecutan konvektif, sementara kadar-kadar perubahan halaju dengan masa, iaitu
∂u
∂t,
∂v
∂tdan
∂w
∂t
disebut pecutan tempatan.
Persamaan-persamaan momentum, (1.22)–(1.24), di atas adalah terlalu umum dan tidak
boleh dikamirkan tanpa merujuk kepada rumus-rumus yang mentakrif semua sebutan
tegasan ricih dan tegasan normal ke permukaan unsur bendalir.
Bendalir Newtonan, walau bagaimana pun, mempamerkan ciri-ciri yang membolehkan
tegasan (ricih dan normal) dikaitkan dengan kecerunan halaju. Perubahan bentuk linear
ditakrif menerusi pekali kelikatan dinamik µ sementara perubahan bentuk isipadu pula
ditakrif menerusi pekali kelikatan kedua λ. Douglas et al. (2001) memberikan
σx = p− 2µ∂u
∂x− λ
(∂u
∂x+
∂v
∂y+
∂w
∂z
)
; τxy = µ(∂u
∂y+
∂v
∂x
)
(1.25)
σy = p− 2µ∂v
∂y− λ
(∂u
∂x+
∂v
∂y+
∂w
∂z
)
; τxz = µ(∂u
∂z+
∂w
∂x
)
(1.26)
σz = p− 2µ∂w
∂z− λ
(∂u
∂x+
∂v
∂y+
∂w
∂z
)
; τyz = µ(∂v
∂z+
∂w
∂y
)
(1.27)
Dalam praktis, kesan pekali kelikatan kedua, λ, adalah kecil; hipotesis Stokes memberi
anggaran λ = − 23µ, sementara tekanan pula diambil sebagai purata ketiga-tiga tegasan
normal dari persamaan-persamaan (1.25)–(1.27).
Untuk bendalir homogeneous, iaitu bendalir yang sifat-sifatnya tidak dipengaruhi oleh ke-
dudukan, gantian untuk sebutan-sebutan tegasan ricih dan normal dari persamaan (1.25)
serta menerusi hipotesis Stokes, bahagian kanan persamaan (1.22) boleh diolah semula
seperti berikut;
Bahagian kanan = ρX − ∂p
∂x+ 2µ
∂2u
∂x2
− 2
3µ
∂
∂x
(∂u
∂x+
∂v
∂y+
∂w
∂z
)
+ µ
[∂
∂y
(∂u
∂y+
∂v
∂x
)
+∂
∂z
(∂u
∂z+
∂w
∂x
)]
= ρX − ∂p
∂x+ µ
(∂2u
∂x2+
∂2v
∂y2+
∂2w
∂z2
)
+1
3µ
∂
∂x
(∂u
∂x+
∂v
∂y+
∂w
∂z
)
sementara bahagian kiri pula boleh ditulis dalam bentuk
Bahagian kiri = ρDu
Dt

BAB 1. ALIRAN LAPISAN SEMPADAN 12
Oleh yang demikian rumus untuk arah-x menjadi
ρDu
Dt= ρX − ∂p
∂x+ µ
(∂2u
∂x2+
∂2u
∂y2+
∂2u
∂z2
)
+1
3µ
∂
∂x
(∂u
∂x+
∂v
∂y+
∂w
∂z
)
(1.28)
dengan rumus bagi arah-y dan z mengambil bentuk yang serupa.
Jika aliran mantap dan tak boleh mampat, persamaan (1.28) boleh diterbitkan semula,
dengan mengabaikan sebutan-sebutan kecil order kedua atau lebih, dalam ketiga-tiga
arah koordinat sebagai
ρDu
Dt= ρX − ∂p
∂x+ µ
(∂2u
∂x2+
∂2u
∂y2+
∂2u
∂z2
)
(1.29)
ρDv
Dt= ρY − ∂p
∂y+ µ
(∂2v
∂x2+
∂2v
∂y2+
∂2v
∂z2
)
(1.30)
ρDw
Dt= ρZ − ∂p
∂z+ µ
(∂2w
∂x2+
∂2w
∂y2+
∂2w
∂z2
)
(1.31)
Persamaan-persamaan (1.29)–(1.31) lebih dikenali sebagai persamaan-persamaan
Navier-Stokes. Bagi aliran laminar, tegasan-tegasan ricih adalah berkadaran terus de-
ngan kelikatan dan kadar terikan ricih, τx = µ(du)/(dy), untuk memudahkan penye-
lesaian persamaan-persamaan Navier-Stokes ini. Sebaliknya, di dalam aliran gelora,
tegasan-tegasan ricihnya lebih kompleks dan tiada model yang berupaya memberikan
penyelakuan yang menyeluruh.
Bagi analisis dalam dua dimensi, semua komponen dalam arah-z diabaikan, jadi
persamaan-persamaan Navier-Stokes dikurangkan menjadi
ρ(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)
= ρX − ∂p
∂x+ µ
(∂2u
∂x2+
∂2u
∂y2
)
(1.32)
ρ( ∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)
= ρY − ∂p
∂y+ µ
(∂2v
∂x2+
∂2v
∂y2
)
(1.33)
1.4.2.1 Persamaan Kamilan Momentum von Karman
Pertimbangkan suatu isipadu kawalan infinitesimal, Rajah 1.9(a). Persamaan kamilan
keterusan membolehkan kita mencari matas. Untuk seunit kedalaman, persamaan kamil-
an keterusan diberikan oleh
matas = mkeluar − mmasuk
=∂
∂x
∫ δ
0ρ u dy dx (1.34)
Persamaan kamilan momentum berbentuk
∑ Fx = Mkeluar −Mmasuk −Matas

BAB 1. ALIRAN LAPISAN SEMPADAN 13
denganMmewakili fluksmomentumdi dalam arah-x. Denganmerujuk Rajah 1.9(c) dan
(d) serta mengabaikan sebutan-sebutan kuasa tinggi, persamaan di atas menjadi
−δ dp− τ0 dx =∂
∂x
∫ δ
0ρ u2 dy dx
−(
∂
∂x
∫ δ
0ρ u dy dx
)
U(x) (1.35)
Rajah 1.9: Isipadu kawalan untuk suatu lapisan sempadan, Potter & Wiggert (1997).
Bahagikan keseluruhannya dengan−dx
τ0 + δdp
dx= U(x)
d
dx
∫ δ
0ρu dy− d
dx
∫ δ
0ρu2 dy (1.36)
Persamaan (1.36) selalunya dirujuk sebagai persamaan kamilan von Karman.
Untuk aliran di permukaan plat rata dengan kecerunan tekanannya sifar, jadi dp/dx = 0
dan U(x) = U∞, persamaan kamilan von Karman dipermudahkan menjadi
τ0 =d
dx
∫ δ
0ρuU∞ dy− d
dx
∫ δ
0ρu2 dy
=d
dx
∫ δ
0ρu(U∞ − u)dy (1.37)
Sekiranya ρ malar, persamaan (1.37) menjadi
τ0 = ρU2∞
dθ
dx(1.38)
dengan θ ialah ketebalan momentum.

BAB 1. ALIRAN LAPISAN SEMPADAN 14
1.5 Penyelesaian Lapisan Sempadan Laminar
1.5.1 Kaedah Tepat Blasius
Penyelesaian yang ditemui oleh Blasius pada tahun 1908 ini kadangkala dikenali juga
sebagai penyelesaian tepat. Untuk aliran mantap tanpa daya jasad dalam dua dimensi
dengan kecerunan tekanan sifar, persamaan keterusan menjadi
∂u
∂x+
∂v
∂y= 0 (1.39)
sementara persamaan momentum atau persamaan Navier-Stokes pula mengambil ben-
tuk
ρ(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)
= ρX − ∂p
∂x+ µ
(∂2u
∂x2+
∂2u
∂y2
)
u∂u
∂x+ v
∂u
∂y= ν
∂2u
∂y2(1.40)
dengan keadaan-keadaan sempadan berikut:
u = 0 di y = 0 (1.41a)
u = U∞ di y = δ (1.41b)
Blasius berpendapat bahawa susuk halaju, u/U∞, patut serupa untuk setiap nilai x, apa-
bila diplot melawan jarak tanpa dimensi daripada sempadan pepejal, katalah η. Untuk
tujuan ini, ketebalan lapisan sempadan, δ, dipilih sebagai parameter untuk menjadikan
jarak daripada sempadan pepejal tak berdimensi. Oleh itu penyelesaian adalah dalam
bentuk
u
U∞
= g(η) dengan η =y
δ(1.42)
Blasius mencadangkan bahawa δ ∼√
νx/U∞ dan menetapkan
η = y
√
U∞
νx(1.43)
Seterusnya menerusi fungsi arus, ψ, dengan
u =∂ψ
∂ydan v = −∂ψ
∂x(1.44)
yang memenuhi persamaan keterusan (1.39) dan dengan menggantikan u dan v ke da-
lam persamaan (1.40) kita dapat mengurangkannya kepada suatu persamaan yang ψ di
dalamnya adalah pembolehubah bersandar yang tunggal.
Jika kita mentakrifkan fungsi arus tanpa dimensi sebagai
f (η) =ψ√
νxU∞
(1.45)

BAB 1. ALIRAN LAPISAN SEMPADAN 15
f (η) menjadi pembolehubah bersandar dengan η sebagai pembolehubah tak bersandar
atau pembolehubah bebas di dalam persamaan (1.40). Dengan ψ ditakrif oleh persama-
an (1.45) dan η oleh persamaan (1.43) kita boleh menilai setiap sebutan di dalam persa-
maan (1.40).
Komponen halaju diberikan oleh
u =∂ψ
∂y=
∂ψ
∂η
∂η
∂y=
(dψ
d f
d f
dη
)∂η
∂y
u =√
νxU∞
d f
dη
√
U∞
νx= U∞
d f
dη(1.46)
dan
v = −∂ψ
∂x= −
[
√νxU∞
∂ f
∂x+
1
2f
√
νU∞
x
]
= −[
√νxU∞
d f
dη
(
−1
2η1
x
)
+1
2f
√
νU∞
x
]
v =1
2
√
νU∞
x
[
ηd f
dη− f
]
(1.47)
Dengan membezakan komponen-komponen halaju, kita boleh menunjukkan bahawa
∂u
∂x= −U∞
2xηd2 f
dη2dan
∂u
∂y= U∞
√
U∞
νx
d2 f
dη2
∂2u
∂y2=
U2∞
νx
d3 f
dη3
Gantikan ketiga-tiga persamaan di atas ke dalam persamaan (1.40) untuk mendapatkan
2d3 f
dη3+ f
d2 f
dη2= 0 (1.48)
dengan keadaan-keadaan sempadan
f =d f
dη= 0 pada η = 0, (1.49a)
d f
dη= 1 pada η = ∞ (1.49b)
Persamaan-persamaan kebezaan separa order kedua (rujuk persamaan (1.39), (1.40)) yang
mengawal pertumbuhan lapisan sempadan laminar di atas plat rata telah dijelmakan ke-
pada suatu persamaan kebezaan separa order ketiga tak linear (persamaan (1.48)) dengan
keadaan-keadaan sempadan yang berikan oleh persamaan (1.49).

BAB 1. ALIRAN LAPISAN SEMPADAN 16
Jadual 1.1: Fungsi f (η) untuk lapisan sempadan laminar se-
panjang suatu plat rata pada incidence sifar.
η = y
√
U∞
νxf f ′ =
u
U∞
f ′′
0 0 0 0.33206
0.4 0.02656 0.13277 0.33147
1.0 0.16557 0.32979 0.32301
1.4 0.32298 0.45627 0.30787
2.0 0.65003 0.62977 0.26675
2.4 0.92230 0.72899 0.22809
3.0 1.39682 0.84605 0.16136
3.4 1.74696 0.90177 0.11788
4.0 2.30576 0.95552 0.06424
4.4 2.69238 0.97587 0.03897
5.0 3.28329 0.99155 0.01591
5.4 3.68094 0.99616 0.00793
6.0 4.27964 0.99898 0.00240
6.4 4.67938 0.99961 0.00098
7.0 5.27926 0.99992 0.00022
Persamaan (1.48) tidak mungkin dapat diselesaikan dalam bentuk tertutup; Blasius me-
nyelesaikannyamenerusi suatu “series expansion” yang kemudiannya diperbaiki olehHo-
warth dengan lebih jitu menggunakan kaedah berangka. Nilai-nilai berangka untuk f ,
d f/dη dan d2 f/dη2 diberikan di dalam Jadual 1.1 dan susuk halaju seperti yang ditun-
jukkan di dalam Rajah 1.10 akan diperolehi dalam bentuk tanpa dimensi dengan mem-
plot u/U∞ melawan η.
Rajah 1.10: Susuk halaju laminar dan gelora.
Daripada Jadual 1.1 kita boleh melihat bahawa η = 5.0, u/U∞ = 0.992. Dengan men-

BAB 1. ALIRAN LAPISAN SEMPADAN 17
takrif tebal lapisan sempadan, δ, sebagai nilai y apabila u/U∞ = 0.99, maka daripada
persamaan (1.43),
δ ≈ 5.0√U∞/νx
=5.0x√Rex
(1.50)
Tegasan ricih di sempadan pepejal ialah
τ0 = µ∂u
∂y
∣∣∣y=0
= µU∞
√
U∞
νx
d2 f
dη2
∣∣∣η=0
dengan itu
τ0 = 0.332U∞
√
ρµU∞
x= 0.332U∞
√
ρ2µU2∞
ρU∞x=
0.332ρU2∞√
Rex(1.51)
dan pekali geseran tempatan di sempadan pepejal, c f , diberikan oleh
c f =τ0
12ρU2
∞
= 0.332U∞
√
ρµU∞
x× 1
12ρU2
∞
=0.664√Rex
(1.52)
Jumlah daya geseran yang bertindak di keseluruhan permukaan dihitung menerusi
FF =∫ A
0τ0dA (1.53)
dan pekali geseran min untuk keseluruhan permukaan pula dikira mengikut
CF =FF/A12ρU2
∞
=
∫ A0 τ0 dA12ρU2
∞A=
1
A
∫ A0 τ0 dA12ρU2
∞
=1
A
∫ A
0c f dA (1.54)
Pekali geseran min untuk aliran dengan halaju arus bebas , U∞, di atas permukaan plat
rata yang panjangnya L dan lebarnya b diperolehi dengan menggantikan untuk τ0 dari-
pada persamaan (1.52) ke dalam persamaan (1.54):
CF =1
A
∫
A0.664Rex
−0.5 dA
=1
bL
∫ L
00.664
(U∞
ν
)−0.5
x−0.5 b dx
=0.664
L
(ν
U∞
)0.5 [ x0.5
0.5
]L
0
= 1.328
(ν
U∞L
)0.5
CF =1.328√ReL
(1.55)
Oleh kerana kecerunan tekanan di dalam lapisan sempadan dianggap sifar, hela bentuk
(atau hela tekanan) boleh diabaikan (iaitu FP = 0). Dengan itu, menerusi persamaan (1.5),
jumlah hela, FD, sama dengan hela geseran, FF, dan dengan yang demikian CD sama
dengan CF;
FD = FF + (FP = 0) = FF
CD = CF

BAB 1. ALIRAN LAPISAN SEMPADAN 18
1.5.2 Kaedah Anggaran
Kita tetapkan empat keadaan sempadan untuk susuk halaju yang dihajati
u = 0 pada y = 0 (1.56a)
u = U∞ pada y = δ (1.56b)
∂u
∂y= 0 pada y = δ (1.56c)
∂2u
∂y2= 0 pada y = 0 (1.56d)
Persamaan-persamaan (1.56a)–(1.56c) diperolehi daripada sketsa susuk halaju sementa-
ra persamaan (1.56d) pula datangnya daripada komponen-x persamaan Navier-Stokes.
Juga u = v = 0 di sempadan jasad pepejal, ∂2u/∂x2 = 0 di permukaan jasad, dan
dp/dx = 0 untuk aliran mantap yang sedang kita pertimbangkan.
Sebagai contoh, kita andaikan susuk halaju berbentuk polinomial kiub,
u
U∞
= A + By + Cy2 + Dy3 (1.57)
dengan A, B, C, dan D mungkin fungsi x. Menerusi empat keadaan sempadan di atas
kita melihat
A = 0 B =3
2δ
C = 0 D = − 1
2δ3
Oleh itu anggaran yang baik untuk susuk halaju di dalam aliran laminar ialah
u
U∞
=3
2δy− 1
2δ3y3 =
3y
2δ− y3
2δ3(1.58)
Kita seterusnya boleh menggunakan susuk halaju ini untuk mencari δ(x) dan τ0(x). Per-
samaan kamilan von Karman memberikan
τ0 =d
dx
∫ δ
0ρ(3y
2δ− y3
2δ3
)(
1− 3y
2δ+
y3
2δ3
)
U2∞ dy = 0.139ρU2
∞
dδ
dx(1.59)
Di sempadan jasad pepejal, τ0 = µ∂u/∂y|y=0, atau dengan menggunakan susuk polino-
mial kiub, iaitu persamaan (1.58),
τ0 = µ( 3
2δU∞
)
(1.60)
Samakan persamaan (1.59) dan (1.60),
δ dδ =32µU∞
0.139ρU2∞
dx = 10.8ν
U∞
dx (1.61)

BAB 1. ALIRAN LAPISAN SEMPADAN 19
Dengan δ = 0 pada x = 0, persamaan (1.61) boleh dikamilkan untuk mendapat
δ = 4.65
√νx
U∞
=4.65x√Rex
(1.62)
dengan Rex ialah nombor Reynolds tempatan. Nilai δ ini digantikan ke dalam persama-
an (1.60) untuk mendapat tegasan ricih tempatan di sempadan pepejal
τ0 = 0.323ρU2∞
√ν
xU∞
=0.323ρU2
∞√Rex
(1.63)
Tegasan ricih tempatan , τ0, dijadikan tanpa dimensi secara membahagikannya dengan12ρU2
∞; ini menghasilkan pekali geseran kulit tempatan sebagai:
c f =τ0
12ρU2
∞
=0.323ρU2
∞√Rex
112ρU2
∞
=0.646√Rex
(1.64)
Jika tegasan ricih tempatan di sempadan pepejal ini dikamilkan sepanjang panjang, L,
daya seret disebabkan oleh geseran kulit di keseluruhan sempadan pepejal, FF, untuk
seunit lebar plat ialah
FF =∫ A
0τ0 dA =
∫ A
0τ0 (1× dx) =
∫ L
0τ0 dx
= 0.646ρU2∞
√
νL/U∞
= 0.646ρU2∞
√
νL2/U∞L
= 0.646ρU2∞L√
ν/U∞L
=0.646ρU2
∞L√ReL
(1.65)
Dari persamaan (1.54), pekali seretan untuk aliran dengan halaju arus bebas , U∞, di atas
permukaan plat rata yang panjangnya L dan lebarnya b diperolehi menerusi:
CF =1
A
∫ A
0c f dA
=1
A
∫
A0.646Rex
−0.5 dA
=1
bL
∫ L
00.646
(U∞
ν
)−0.5
x−0.5 b dx
=0.646
L
(ν
U∞
)0.5 [ x0.5
0.5
]L
0
= 1.292
(ν
U∞L
)0.5
CF =1.292√ReL
(1.66)
1.6 Penyelesaian Lapisan Sempadan Gelora
Terdapat dua kaedah penyelasaian kepada lapisan sempadan gelora—kaedah hukum
kuasa dan kaedah empirik. Kedua-duanya menggunakan data ujikaji. Kaedah yang

BAB 1. ALIRAN LAPISAN SEMPADAN 20
pertama yang dibincangkan di bawah lebih mudah sementara kaedah kedua pula dapat
memberikan lebih maklumat serta lebih tepat tetapi tidak akan dibincangkan di sini.
Di dalam aliran gelora, Rajah 1.11, jejak halaju menunjukkan pergolakan atau gincatan
halaju seketika, u, yang rambang sebagai hasil campur halaju min, u dan komponen
gincatan, u′,
u = u± u′
Oleh kerana aliran mantap, halaju min u tidak berubah dengan masa.
Rajah 1.11: Perubahan halaju dengan masa.
1.6.1 Kaedah Hukum Kuasa
Di dalam kaedah hukum kuasa kita menyesuaikan data untuk susuk halaju dengan per-
samaan hukum kuasa:
u
U∞
=(y
δ
)1/n: n =
7 Rex < 107
8 107 < Rex < 108
9 108 < Rex < 109
(1.67)
dengan
Rex =U∞x
ν
Selepas ini, persamaan von Karman boleh digunakan seperti yang telah digunakan un-
tuk mencari penyelesaian lapisan sempadan laminar, KECUALI ketika tegasan ricih di-
hitung. Bentuk hukum kuasa, persamaan (1.67), menghasilkan(
∂u
∂y
)
y=0
= ∞
jadi susuk ini memberikan keputusan yang kurang memuaskan, terutama untuk pengi-
raan tegasan ricih di sempadan pepejal. Jadi takrif
τ0 =
(
µ∂u
∂y
)
y=0
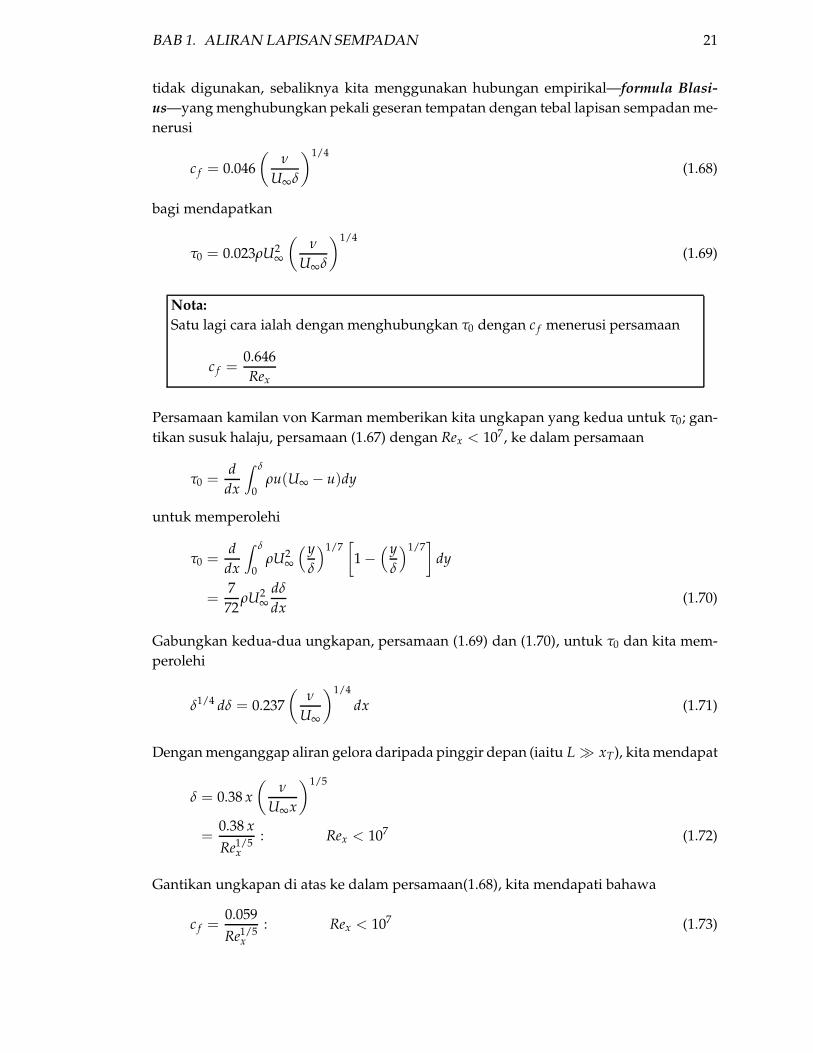
BAB 1. ALIRAN LAPISAN SEMPADAN 21
tidak digunakan, sebaliknya kita menggunakan hubungan empirikal—formula Blasi-
us—yangmenghubungkan pekali geseran tempatan dengan tebal lapisan sempadanme-
nerusi
c f = 0.046
(ν
U∞δ
)1/4
(1.68)
bagi mendapatkan
τ0 = 0.023ρU2∞
(ν
U∞δ
)1/4
(1.69)
Nota:
Satu lagi cara ialah dengan menghubungkan τ0 dengan c f menerusi persamaan
c f =0.646
Rex
Persamaan kamilan von Karman memberikan kita ungkapan yang kedua untuk τ0; gan-
tikan susuk halaju, persamaan (1.67) dengan Rex < 107, ke dalam persamaan
τ0 =d
dx
∫ δ
0ρu(U∞ − u)dy
untuk memperolehi
τ0 =d
dx
∫ δ
0ρU2
∞
(y
δ
)1/7[
1−(y
δ
)1/7]
dy
=7
72ρU2
∞
dδ
dx(1.70)
Gabungkan kedua-dua ungkapan, persamaan (1.69) dan (1.70), untuk τ0 dan kita mem-
perolehi
δ1/4 dδ = 0.237
(ν
U∞
)1/4
dx (1.71)
Denganmenganggap aliran gelora daripada pinggir depan (iaitu L ≫ xT), kitamendapat
δ = 0.38 x
(ν
U∞x
)1/5
=0.38 x
Re1/5x
: Rex < 107 (1.72)
Gantikan ungkapan di atas ke dalam persamaan(1.68), kita mendapati bahawa
c f =0.059
Re1/5x
: Rex < 107 (1.73)

BAB 1. ALIRAN LAPISAN SEMPADAN 22
Dengan mengkamilkan
CF =1
A
∫ A
0c f dA
kita mendapat pekali geseran min sebagai
CF =0.073
Re1/5L
: Rex < 107 (1.74)
dengan
ReL =U∞L
ν
Rumus-rumus untuk δ, τ0, c f , CF dan FF di atas boleh digunakan untuk Rex ≈ 108 tanpa
ralat yang besar.
Jika panjang L tidak begitu besar dibandingkan dengan xT, katalah L = 3xT , bahagian
laminar turut mempengaruhi aliran di pinggir depan plat. Untuk kes sebegini, dengan
ReL < 107, pekali geseran min boleh diubahsuai sebagai
CF =0.073
Re1/5L
− 1060
ReL: Rec = 3× 105 (1.75a)
CF =0.073
Re1/5L
− 1700
ReL: Rec = 5× 105 (1.75b)
CF =0.073
Re1/5L
− 2080
ReL: Rec = 6× 105 (1.75c)
dengan Rec ialah nombor Reynolds genting di titik berlakunya peralihan
Rec =U∞xT
ν
Tebal anjakan, δ∗, dan tebal momentum, θ, masing-masing diberikan oleh
δ∗ =0.048 x
Re1/5x
(1.76)
θ =0.037 x
Re1/5x
(1.77)

Bab 2
ALIRAN BENDALIR UNGGUL
2.1 Gerakan Zarah-zarah Bendalir
Untuk analisis matematik gerakan bendalir, dua pendekatan biasanya digunakan:
1. Kaedah Lagrangian
(a) Kajian pola aliran SATU zarah individu
(b) Laluan yang dijejaki oleh SATU zarah tersebut dikaji dengan teliti
(c) Contohnya, kajian gerakan SEBUAH kenderaan menerusi jarak tertentu
2. Kaedah Eulerian
(a) Kajian pola aliran SEMUA zarah secara serentak pada sesuatu keratan
(b) Laluan yang dijejaki oleh SEMUA zarah di suatu keratan pada sesuatu masa
dikaji dengan teliti
(c) Contohnya, kajian SEMUA kenderaan di atas jalan di sesuatu lokasi (persim-
pangan lampu isyarat, misalnya) pada sesuatu ketika.
Di dalam bidang Mekanik Bendalir, kaedah Eulerian sering digunakan kerana analisis
matematiknya lebih mudah. Lagi pula, gerakan hanya SATU zarah tidak begitu penting.
2.2 Jenis-jenis Garisan Aliran Bendalir
2.2.1 Garis Arus
Garisan bayangan yang dilukis di dalam medan bendalir supaya tangen terhadapnya
pada sebarang titik memberikan arah gerakan di titik tersebut, Rajah 2.1. Pertimbangkan
satu zarah yang bergerak sepanjang satu garisarus, jarak ds, yangmempunyai komponen
dx, dy dan dz sepanjang tiga paksi yang saling berserenjang. Dan katalah komponen-
komponen vektor halaju Vs sepanjang paksi-x, y dan z ialah u, v dan w. Masa yang
23

BAB 2. ALIRAN BENDALIR UNGGUL 24
sV
sV
sV
Rajah 2.1: Garisarus.
diambil oleh zarah untuk bergerak sepanjang jarak ds di atas garisarus dengan halaju Vs
ialah
t =ds
Vs
yang sama dengan
t =dx
u=
dy
v=
dz
w
Dengan itu persamaan kebezaan untuk garisarus boleh ditulis sebagai
dx
u=
dy
v=
dz
w(2.1)
Sesuatu unsur bendalir yang dikelilingi oleh sejumlah garis arus yangmembendung alir-
an dinamai tiub arus. Oleh kerana tiada gerakan bendalir yang memintas sesuatu garis
arus, maka tiada bendalir yang dapat memasuki atau meninggalkan tiub arus, kecuali
menerusi dua penghujungnya, A dan B di dalam Rajah 2.2. Jelas bahawa sesuatu tiub
arus itu berkelakuan seperti sesuatu tiub pepejal.
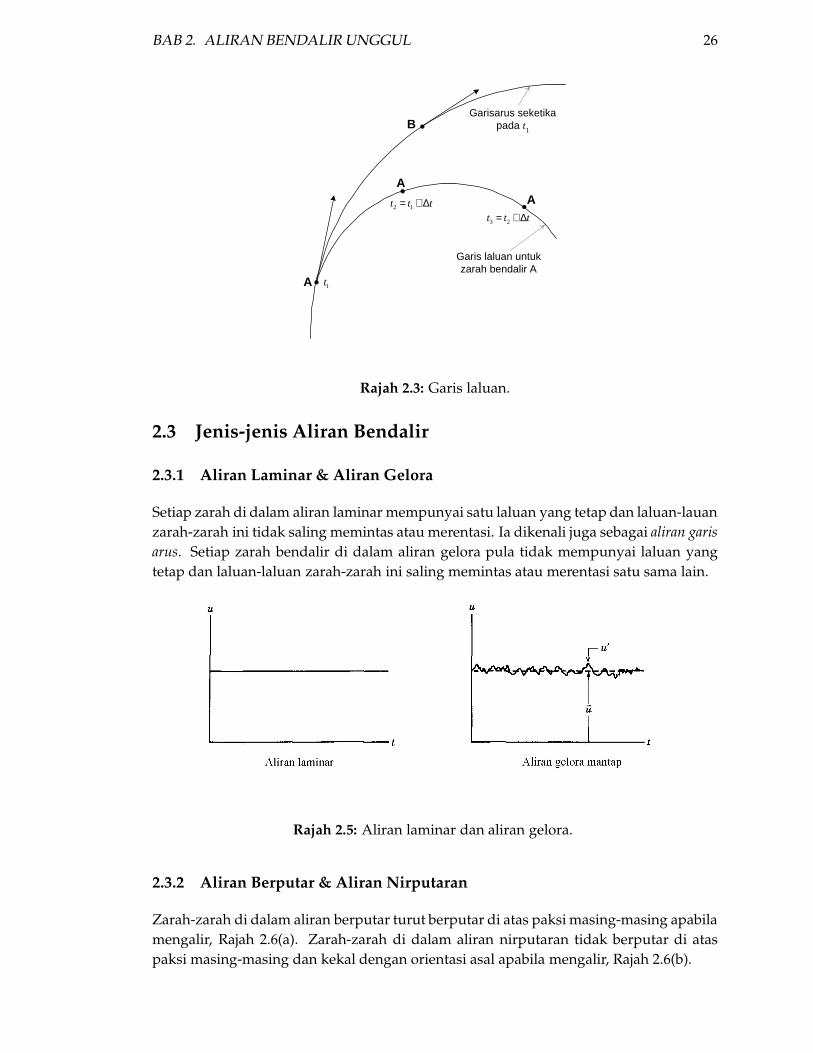
2.2.2 Garis laluan
Garis laluan ialah lokus satu zarah bendalir yang bergerak, iaitu satu lengkung yang di-
jejaki oleh satu zarah semasa gerakannya. Rajah 2.3 menunjukkan satu garisarus pada
t1 yang menunjukkan vektor halaju untuk zarah A dan B. Pada ketika t2 dan t3, zarah
A ditunjukkan berada di kedudukan seterusnya. Garisan yang menyambungkan semua
kedudukan ini mewakili garis laluan zarah A.

BAB 2. ALIRAN BENDALIR UNGGUL 25
B
A
Rajah 2.2: Tiub arus.
2.2.3 Garis upaya atau Garis Sama-upaya
Kehilangan turus (tenaga) zarah-zarah bendalir terjadi apabila zarah- zarah ini mele-
wati garis-garis arus. Jika kita lukiskan garisan yang menyambungkan titik-titik yang
mempunyai keupayaan yang sama di atas garis-garis arus yang bersebelahan, kita akan
mendapat garis upaya atau garis sama-upaya, Rajah 2.4. Garisan AA’, BB’, CC’ dan DD’
ialah garisarus dan PP’, QQ’, RR’ dan SS’ pula ialah garis sama- upaya.
A
A'
BC
D B'C'
D'
P
Q R
S
Q' R'
P' S'
Rajah 2.4: Garis upaya atau sama-upaya.
BAB 2. ALIRAN BENDALIR UNGGUL 26
B
A
AA
1t
2 1t t t= + ∆
3 2t t t= + ∆
Garis laluan untukzarah bendalir A
Garisarus seketikapada t1
Rajah 2.3: Garis laluan.
2.3 Jenis-jenis Aliran Bendalir
2.3.1 Aliran Laminar & Aliran Gelora
Setiap zarah di dalam aliran laminar mempunyai satu laluan yang tetap dan laluan-lauan
zarah-zarah ini tidak saling memintas atau merentasi. Ia dikenali juga sebagai aliran garis
arus. Setiap zarah bendalir di dalam aliran gelora pula tidak mempunyai laluan yang
tetap dan laluan-laluan zarah-zarah ini saling memintas atau merentasi satu sama lain.
Rajah 2.5: Aliran laminar dan aliran gelora.
2.3.2 Aliran Berputar & Aliran Nirputaran
Zarah-zarah di dalam aliran berputar turut berputar di atas paksi masing-masing apabila
mengalir, Rajah 2.6(a). Zarah-zarah di dalam aliran nirputaran tidak berputar di atas
paksi masing-masing dan kekal dengan orientasi asal apabila mengalir, Rajah 2.6(b).

BAB 2. ALIRAN BENDALIR UNGGUL 27
Rajah 2.6: Aliran berputar, dan aliran nirputaran.
2.4 Persamaan Keterusan 2-D Aliran Tak Likat
x
y
( )vv dy
y
ρρ ∂+∂
( )uu dx
x
ρρ ∂+∂uρ
vρ
dy
dx
Rajah 2.7: Aliran jisim menerusi suatu unsur bendalir.
Pertimbangkan suatu unsur segiempat bendalir yang mempunyai tepian dx dan dy serta
tebal b seperti di dalam Rajah 2.7. Halaju di dalam arah-x dan y ialah u dan v. Untuk
arah-x, jisim bendalir yang tersimpan di dalam unsur bendalir seunit masa boleh dida-
pati dengan menolak kadar aliran keluar daripada kadar aliran masuk:
ρub dy−[
ρu +∂(ρu)
∂xdx
]
b dy = −∂(ρu)
∂xb dx dy
Begitu juga dengan bendalir yang tersimpan per unit masa di dalam arah-y,
−∂(ρv)
∂yb dx dy
Hasil dari penyimpanan ini jisim di dalam unsur bendalir (ρb dx dy) sepatutnya bertam-
bah sebanyak ∂(ρb dx dy)/∂t di dalam seunit masa. Dengan itu, persamaan berikut dipe-

BAB 2. ALIRAN BENDALIR UNGGUL 28
rolehi:
−∂(ρu)
∂xb dx dy− ∂(ρv)
∂yb dx dy =
∂(ρb dx dy)
∂t
atau
∂ρ
∂t+
∂(ρu)
∂x+
∂(ρv)
∂y= 0 (2.2)
Persamaan (2.2) disebut persamaan keterusan. Persamaan ini boleh digunakan untuk aliran
boleh mampat tak mantap. Bagi aliran mantap, sebutan pertama, iaitu ∂ρ/∂t, adalah sifar.
Untuk aliran tak boleh mampat, ρ adalah malar, jadi persamaan berikut diperolehi:
∂u
∂x+
∂v
∂y= 0 (2.3)
Persamaan (2.3) digunakan untuk aliran mantap dan tak boleh mampat.
2.5 Persamaan Momentum 2-D Aliran Tak Likat
x
y
pp dy
y
∂+∂
pp dx
x
∂+∂p
p
dy
dx
Rajah 2.8: Imbangan daya tekanan ke atas unsur bendalir
Pertimbangkan daya yang bertindak ke atas suatu unsur kecil bendalir, Rajah 2.8. Oleh
kerana bendalir ini adalah bendalir unggul, tiada daya likat yang bertindak. Jadi, mene-
rusi hukum gerakan kedua Newton, jumlahan daya-daya yang bertindak ke atas unsur
ini di dalam sebarang arah mestilah mengimbangi daya inersia di dalam arah yang sa-
ma. Tekanan yang bertindak ke atas unsur kecil bendalir, dx dy ditunjukkan di dalam
Rajah 2.8. Di samping itu, dengan mengambilkira daya jasad dan menganggap bahawa
jumlahan kedua-dua daya ini (iaitu daya tekanan dan daya jasad) sama dengan daya

BAB 2. ALIRAN BENDALIR UNGGUL 29
inersia, persamaan gerakan untuk kes ini boleh diperolehi seperti berikut:
ρ(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)
︸ ︷︷ ︸
daya inersia
= ρX − ∂p
∂x(2.4a)
ρ( ∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)
︸ ︷︷ ︸
daya inersia
= ρY − ∂p
∂y(2.4b)
Persamaan (2.4) sebenarnya adalah persamaan Navier-Stokes yang sebutan likatnya te-
lah dikeluarkan—dalam bentuk ini ia lebih dikenali sebagai persamaan gerakan Euler un-
tuk dua dimensi. Bagi aliran mantap, jika daya jasad diabaikan, maka untuk seunit jisim
bendalir:
ρ(
u∂u
∂x+ v
∂u
∂y
)
= −∂p
∂x(2.5a)
ρ(
u∂v
∂x+ v
∂v
∂y
)
= −∂p
∂y(2.5b)
dengan
ax =(
u∂u
∂x+ v
∂u
∂y
)
= pecutan dalam arah-x
dan
ay =(
u∂v
∂x+ v
∂v
∂y
)
= pecutan dalam arah-y
Di dalam aliran bendalir dua dimensi, tiga kuantiti perlu diketahui, iaitu u, v dan p,
sebagai fungsi x, y dan t:
u = u(x, y, t)
v = v(x, y, t)
p = p(x, y, t)
Jika halaju-halaju u dan v diketahui, tekanan, p, boleh dikira menerusi persamaan (2.4)
atau (2.5).
Bagaimanapun, oleh kerana sebutan pecutan (iaitu sebutan inersia) tidak linear, penye-
lesaian analitikal menjadi sukar dan hanya terhad kepada beberapa kes mudah saha-
ja. Biasanya, bagi aliran unggul persamaan keterusan (2.3) dan persamaan gerakan Eu-
ler (2.4) atau (2.5) diselesaikan bagi keadaan-keadaan awal dan keadaan-keadaan sem-
padan yang tertentu.

BAB 2. ALIRAN BENDALIR UNGGUL 30
PeralihanPeralihan PutaranPutaran
Herotan Sudut,tanpa putaran
Herotan Sudut,tanpa putaran Herotan IsipaduHerotan Isipadu
Rajah 2.9: Gerakan-gerakan unsur bendalir.
2.6 Vortisiti
Aliran unggulmembezakan di antara aliran berputar dan aliran tak berputar (atau nirpu-
taran). Umumnya terdapat dua jenis gerakan: peralihan (translation) dan putaran (rota-
tion). Kedua-duanya boleh wujud tersendiri atau serentak (gerakan peralihan bertindih-
an dengan dengan gerakan putaran atau sebaliknya). Sekiranya sesuatu unsur pepejal
dapat diwakili oleh satu segi empat tepat maka peralihan tulen atau putaran tulen boleh
diwakili oleh Rajah 2.9. Sekiranya kita mengambil segi empat tepat tadi sebagai mewaki-
li bendalir, di samping dua gerakan tadi, ia juga boleh berubah bentuk: linear atau sudut,
Rajah 2.9.
x
y
dy
dxA
b
a
α
β
A'
a'
b'v dt
vdx dt
y
∂−∂
u dt
udy dt
y
∂∂
α β≠
Rajah 2.10: Putaran, peralihan dan herotan.

BAB 2. ALIRAN BENDALIR UNGGUL 31
Daripada Rajah 2.10, kadar purata putaran dalam masa dt ialah
ω =α + β
2× 1
dt=
1
2
α + β
dt(2.6)
tetapi, untuk nilai-nilai kecil, dan mengambil putaran melawan arah jam sebagai positif,
α =lengkok
jejari=
∂v
∂xdx dt
1
dx=
∂v
∂xdt
dan
β =lengkok
jejari= −∂u
∂ydy dt
1
dy= −∂u
∂ydt
Dengan menggantikan ungkapan untuk α dan β di atas ke dalam persamaan (2.6), maka
kadar putaran sekitar paksi-z ialah
ωz =1
2
(∂v
∂xdt− ∂u
∂ydt
)1
dt
=1
2
(∂v
∂x− ∂u
∂y
)
︸ ︷︷ ︸
vortisiti, ζz
(2.7a)
Putaran unsur bendalir sekitar dua paksi yang lain boleh ditemui menerusi kaedah yang
sama. Untuk paksi-y
ωy =1
2
(∂u
∂z− ∂w
∂x
)
︸ ︷︷ ︸
vortisiti, ζy
(2.7b)
dan untuk paksi-x
ωx =1
2
(∂w
∂y− ∂v
∂z
)
︸ ︷︷ ︸
vortisiti, ζx
(2.7c)
Ungkapan di dalam kurungan,(
∂w
∂y− ∂v
∂z
)
= ζx(
∂u
∂z− ∂w
∂x
)
= ζy(
∂v
∂x− ∂u
∂y
)
= ζz
(2.8)
disebut vortisiti, ζ;
ζx = 2ωx
ζy = 2ωy
ζz = 2ωz
(2.9)
dengan ω adalah halaju sudut unsur-unsur bendalir sekitar pusat jisim di dalam sesuatu
satah (xy, xz atau yz).

BAB 2. ALIRAN BENDALIR UNGGUL 32
2.7 Penentuan Aliran Berputar atau Sebaliknya
Ungkapan untuk vortisiti, persamaan (2.8), diperolehi dengan menganggap bahawa ge-
rakan putaran unsur bendalir wujud dan bertindihan di atas gerakan peralihan. Aliran
sedemikian disebut aliran berputar dan
ζ =∂v
∂x− ∂u
∂y, 0 (2.10)
Daripada sini, kita boleh menyimpulkan bahawa bagi aliran tanpa putaran, atau nirpu-
taran, persamaan (2.8), dan dengan itu vortisiti, mestilah bernilai sifar. Oleh itu, jika
gerakan zarah-zarah hanyalah semata-mata gerakan peralihan dan herotannya pula si-
metrikal, aliran ini disebut aliran nirputaran dan keadaan yang mesti dipatuhinya ialah;
ζ =∂v
∂x− ∂u
∂y= 0 (2.11)
2.8 Edaran
Pertimbangkan unsur bendalir ABCD dalam gerakan putaran, Rajah 2.11.
x
y
uu dy
y
∂+∂
vv dx
x
∂+∂
v
u
dx
dy
A
B C
D
Arahkamilan
Rajah 2.11: Edaran.
Oleh kerana unsur bendalir ini berputar, terjadi halaju pinggiran hasilan. Bagaimanapun,
pusat putaran ini tidak diketahui jadi lebih mudah jika kita mengaitkan putaran ini de-
ngan jumlahan hasil darab halaju dengan jarak sekeliling kontur unsur bendalir. Jum-
lahan hasil darab ini disebut edaran
Γ =∮
vs ds (2.12)

BAB 2. ALIRAN BENDALIR UNGGUL 33
yang lazimnya dianggap positif dalam arah melawan jam. Dengan itu, untuk unsur
ABCD, bermula daripada sisi AD,
ΓABCD = u dx +
(
v +∂v
∂xdy
)
dy
−(
u +∂u
∂ydy
)
dx− v dy
=∂v
∂xdx dy− ∂u
∂ydy dx
=
(∂v
∂x− ∂u
∂y
)
dx dy
tetapi untuk aliran 2-D dalam satah-xy,(
∂v
∂x− ∂u
∂y
)
= ζz
iaitu vortisiti unsur ABCD sekitar paksi-z, ζz. Hasil darab (dx dy) pula ialah luas unsur
dA. Dengan itu
ΓABCD =
(∂v
∂x− ∂u
∂y
)
dx dy
= ζz dA
2.9 Keupayaan Halaju
Keupayaan halaju, φ, adalah suatu kuantiti skalar yang bergantung kepada ruang dan
masa;
−φ =∫
vs ds
dengan vs ialah halaju sepanjang suatu jarak ds. Daripada takrif di atas, kitamemperolehi
dφ = −vs ds
atau
vs = −dφ
ds
Tanda negatif muncul kerana kelaziman bahawa keupayaan halaju susut dalam arah alir-
an. Keupayaan halaju bukanlah suatu kuantiti fizikal yang boleh diukur dengan mudah;
oleh yang demikian kedudukan nilai sifarnya boleh dipilih secara rambang.
Hasil bezaan keupayaan halaju terhadap sesuatu arah memberikan halaju dalam arah
tersebut, iaitu untuk koordinat Cartesan (x, y, z);
u = −∂φ
∂x; v = −∂φ
∂y; w = −∂φ
∂z(2.13)
BAB 2. ALIRAN BENDALIR UNGGUL 34
Bagi sistem koordinat kutub (r, θ, z), komponen halaju diberikan oleh
vr = −∂φ
∂r; vθ = −1
r
∂φ
∂θ; vz = −∂φ
∂z(2.14)
Daripada persamaan (2.13)
∂u
∂y= − ∂2φ
∂y∂xdan
∂v
∂x= − ∂2φ
∂x∂y
yang menghasilkan:
∂v
∂x− ∂u
∂y= 0 (2.15)
Umumnya, hasil kebezaan keseluruhan bagi fungsi φ di dalam dua dimensi diperolehi
menerusi pembezaan separa
dφ =∂φ
∂xdx +
∂φ
∂ydy (2.16)
dan menerusi persamaan (2.13)
dφ = −u dx− v dy = − (u dx + v dy) (2.17)
Kesannya, apabila fungsi φ telah diperolehi, pembezaan φ dengan x dan y memberikan
halaju-halaju u dan v dan dengan itu pola aliran ditemui.
Suatu garisan yang sepanjang-panjangnya mempunyai nilai φ yang malar dinamai garis-
an sama upaya, dan di atas garisan ini arah halaju bendalir adalah berserenjang dengan-
nya.
Sementara itu, persamaan keterusan untuk aliran mantap tak boleh mampat dalam dua
dimensi yang diberikan oleh persamaan (2.3)
∂u
∂x+
∂v
∂y= 0
boleh ditulis dalam sebutan φ sebagai
∂2φ
∂x2+
∂2φ
∂y2= 0 (2.18)
Persamaan (2.18) dikenali sebagai persamaan Laplace.
Perlu diingatkan bahawa pola aliran upaya ditentukan hanya oleh hubungan keterus-
an (iaitu persamaan (2.3) atau persamaan (2.18)); hubungan momentum (iaitu persama-
an (2.4) atau (2.5)) cuma digunakan untuk menentukan tekanan.

BAB 2. ALIRAN BENDALIR UNGGUL 35
2.10 Fungsi Arus dan Kadar Aliran
Fungsi arus, Rajah 2.12, adalah satu fungsi yang menghurai bentuk pola aliran. Ia juga
mewakili luahan atau kadar aliran seunit tebal. Secara matematik:
ψ = f (x, y) (2.19)
dengan
u = komponen halaju di titik P dalam arah-x
v = komponen halaju di titik P dalam arah-y
ψ = fungsi arus di titik P
Pertimbangkan satu lagi garis arus sejauh dy di dalam arah-y dan dx di dalam arah-x,
Rajah 2.12. Fungsi arus untuk garis arus ini ialah ψ + dψ.
x
y
ψ
dψ ψ+
dx
dy
v
uP
Rajah 2.12: Fungsi arus.
Kadar aliran (seunit tebal) merentasi dy diberikan oleh:
dψ = u dy ⇒ u =dψ
dy(2.20a)
sementara kadar aliran (seunit tebal) merentasi dx pula ialah:
dψ = −v dx ⇒ v = −dψ
dx(2.20b)
Apabila komponen-komponen halaju ditakrif dalam sebutan fungsi arus kita tahu baha-
wa pengabadian jisim telah dipatuhi. Walaupun kita masih belum mengetahui apakah
fungsi ψ(x, y) untuk sesuatu masalah, tetapi sekurang-kurangnya kita telah memudahk-
an analisis dengan hanya perlu menentukan satu fungsi anu, iaitu ψ(x, y), sebagai ganti
dua fungsi, u(x, y) dan v(x, y).

BAB 2. ALIRAN BENDALIR UNGGUL 36
Di samping itu garisan yang di sepanjangnya nilai ψ adalah malar dinamai garisarus
dan kecerunan di sebarang titik sepanjang sesuatu garisarus diberikan oleh persamaan
garisarus
dy
dx=
v
u⇒ u dy− v dx = 0 (2.21)
Gantikan u dan v ke dalam persamaan di atas
∂ψ
∂ydy +
∂ψ
∂xdx = 0 (2.22)
⇒ dψ = 0
Ini menunjukkan bahawa luahan di antara dua garis arus adalah malar dan diberikan
oleh perbezaan di antara kedua-dua fungsi arus tersebut, iaitu dψ.
Dalam koordinat silinder, komponen halaju, vr dan vθ , dihubungkan dengan fungsi arus,
ψ(x, y), menerusi persamaan
vr =1
r
∂ψ
∂θ; vθ = −∂ψ
∂r(2.23)
dengan vr positif mengarah keluar daripada asalan dan vθ positif dalam arah melawan
jam.
Konsep fungsi arus boleh digunakan untuk aliran simetri sepaksi (seperti aliran di dalam
paip atau aliran di sekeliling jasad yang berputar) dan aliran boleh mampat dua dimensi.
Konsep ini, bagaimanapun, TIDAK boleh digunakan untuk aliran tiga dimensi.
2.11 Hubungan di Antara Fungsi Arus dan Keupayaan Halaju
Oleh kerana setiap komponen halaju boleh diungkapkan dalam sebutan φ dan ψ, wujud
hubungan di antara φ dan ψ.
u = −∂φ
∂x=
∂ψ
∂yv = −∂φ
∂y= −∂ψ
∂x
Dengan itu
∂ψ
∂y= −∂φ
∂x
∂ψ
∂x=
∂φ
∂y(2.24)
Persamaan (2.24) dikenali sebagai keadaan-keadaan Cauchy-Riemann.
Hasil bezaan keseluruhan ψ(x, y) ialah
dψ =∂ψ
∂xdx +
∂ψ
∂ydy
= −v dx + u dy

BAB 2. ALIRAN BENDALIR UNGGUL 37
dan kita juga mengetahui bahawa untuk setiap garisarus dψ = 0; dengan itu
dy
dx=
v
u(2.25)
Hasil bezaan keseluruhan keupayaan halaju, φ(x, y), pula ialah
dφ =∂φ
∂xdx +
∂φ
∂ydy
= −u dx− v dy
Bagi setiap garisan sama-upaya φ adalah malar dan dengan itu dφ = 0. Jadi untuk
garisan sama-upaya
dy
dx= −u
v(2.26)
Daripada persamaan (2.25) dan (2.26) kita boleh melihat bahawa garisan sama-upaya (φ
yang malar) dan garisarus (ψ yang malar) memintas satu sama lain secara ortogon. Oleh
itu garis sama-upaya dan garisarus membentuk jaringan garisan-garisan yang saling ber-
serenjang yang dikenali sebagai jaringan aliran, Rajah 2.13.
Rajah 2.13: Jaringan aliran, Massey (1983).
2.12 Beberapa Pola Asas Aliran
2.12.1 Aliran garis lurus
Pola aliran termudah ialah aliran yang garisarusnya lurus, Rajah 2.14
Kelaziman yang digunakan untuk menomborkan garisarus ialah fungsi arus dianggap
bertambah ke kiri pemerhati yangmemandang ke arus hilir. Jika halaju aliranV condong

BAB 2. ALIRAN BENDALIR UNGGUL 38
pada sudut α ke paksi-x, maka komponen dalam arah-x dan y diberikan oleh
u = V cos α v = V sin α (2.27)
Fungsi aliran diperolehi dengan menggantikan u dan v di atas ke dalam persamaan
dψ =∂ψ
∂xdx +
∂ψ
∂ydy
= −v dx + u dy
= u dy− v dx
yang menjadi
ψ =∫
V cos α dy−∫
V sin α dx + pemalar (2.28)
x
y
α
0ψ
1ψ
2ψ
3ψ
4ψ
5ψ
6ψ
V
Rajah 2.14: Aliran garis lurus.
Oleh kerana di dalam aliran seragamV = pemalar dan di dalam aliran garis lurus α juga
turut malar, ungkapan untuk fungsi arus menjadi
ψ = Vy cos α −Vx sin α + pemalar (2.29)
Pemalar kamilan boleh dijadikan sifar denganmemilih supaya garisarus rujukan, ψ0 = 0,
melalui asalan. Jadi, apabila x = 0 dan y = 0 fungsi arus ψ = ψ0 = 0. Dengan itu
ψ = V(y cos α − x sin α) (2.30)
Oleh kerana u dan v malar maka ∂u/∂y dan ∂v/∂x adalah sifar, oleh yang demikian
aliran adalah aliran nirputaran.

BAB 2. ALIRAN BENDALIR UNGGUL 39
Keupayaan halaju diperolehi menerusi persamaan (2.16) dan (2.17)
dφ =∂φ
∂xdx +
∂φ
∂ydy = −(u dx + v dy)
Dengan itu, menerusi gantian dan kamilan,
φ = −(∫
V cos α dx +∫
V sin α dy
)
+ pemalar
tetapi jika φ = φ0 = 0 di x = 0 dan y = 0, maka
φ = −V (x cos α + y sin α) (2.31)
2.12.2 Aliran daripada sumber atau punca
Sumber ialah suatu titik yang darinya terpancar bendalir keluar secara sekata dalam se-
mua arah, Rajah 2.15.
Rajah 2.15: Aliran sumber.
Bagi aliran dua dimensi, kekuatan sesuatu sumber,m, adalah ukuran jumlah kadar aliran
isipadu bendalir seunit tebal yang berpunca daripada sumber tersebut.
Oleh kerana halaju secara keseluruhannya dalam arah jejari, maka untuk seunit tebal,
halaju v pada jejari r diberikan oleh
Kadar aliran isipadu
Luas yang berseranjang ke halaju=
m
2πr
Untuk aliran daripada suatu sumber di asalan, halaju tangen
vt =∂ψ
∂r= 0

BAB 2. ALIRAN BENDALIR UNGGUL 40
sementara halaju jejari yang menghala keluar
vr = −(
∂ψ
r∂θ
)
=m
2πr
Oleh itu
ψ = − m
2πθ (2.32)
dengan θ dalam ukuran radian dan diambil dalam julat 0 ≤ θ < 2π.
Juga
−∂φ
∂r= vr =
m
2πr
dan
− ∂φ
r∂θ= vt = 0
Dengan itu
φ = − m
2πln( r
C
)
(2.33)
Garis-garis arus adalah garis yang θ nya malar, iaitu garisan jejari. Untuk aliran nirpu-
taran, garisan φ adalah bulatan sepusat.
2.12.3 Aliran ke sinki
Lawan sumber ialah sinki yang merupakan suatu titik yangmenjadi pusat tumpuan alir-
an bendalir dan bendalir di titik ini sentiasa di keluarkan. Kekuatan sinki dianggap ne-
gatif dan ungkapan untuk halaju dan fungsi ψ serta φ adalah sama seperti aliran sumber.
2.12.4 Vorteks nirputaran atau bebas
Pola aliran yang garis-garis arusnya berbentuk bulatan sepusat dikenali sebagai vorteks
bulat satah. Zarah-zarah yang bergerak dalam bulatan sepusat ini mungkin berputar di
atas paksinya sendiri atau mungkin tidak. Jika zarah-zarah ini tidak berputar di atas
paksinya sendiri, vorteks ini dikenali sebagai vorteks bebas atau vorteks nirputaran.
Rajah 2.16 menunjukkan suatu unsur di dalam medan vorteks bebas yang dibendung
oleh dua garis arus dan dua jejari. Halaju v dan v + dv dianggap positif dalam arah
melawan jam. Halaju yang berserenjang terhadap adalah sifar.
Edaran Γ (positif dalam arah lawan jam) sekitar unsur ini ialah
Γ = (v + dv)(R + dR) dθ − vR dθ
= (R dv + v dR) dθ

BAB 2. ALIRAN BENDALIR UNGGUL 41
Rajah 2.16: Unsur bendalir dalam medan vorteks bebas.
dengan magnitud-magnitud kecil order tinggi diabaikan.
Vortisiti diberikan oleh
ζ =Edaran
Luas=
(Rdv + v dR)dθ
R dθ dR
=v
R+
dv
dR
=v
R+
∂v
∂R: apabila dR → 0 (2.34)
dengan R mewakili jejari kelengkungan garis arus, bukannya koordinat kutub.
Untuk aliran nirputaran
ζ =v
R+
∂v
∂R= 0 (2.35)
Halaju adalah malar sepanjang garis arus dan berubah hanya dengan R, jadi
dv
dR= − v
R
yang boleh dikamil untuk memberikan
vR = pemalar (2.36)
Edaran sekitar satu litar yang sepadan dengan suatu garis arus vorteks bebas diberikan
sebagai
Γ = v× 2πR
Oleh kerana vR = pemalar, edaran juga turut malar bagi keseluruhan vorteks. Aliran
vorteks bebas adalah nirputaran di semua bahagian kecuali pusatnya, yang mempunyai
teras berputar dan vortisi yang bukan sifar. Jadi di pusat vorteks bebas, persamaan (2.36)
tidak sah digunakan.

BAB 2. ALIRAN BENDALIR UNGGUL 42
Dalam vorteks bulat dua dimensi, halaju adalah keseluruhannya dalam arah tangen. Ba-
gi vorteks yang berpusat di asalan koordinat
ψ =∫
∂ψ
∂rdr +
∫∂ψ
∂θdθ
=∫
v dr + 0
=∫
Γ
2πrdr
=Γ
2πln
(r
r0
)
(2.37)
dengan r0 mewakili jejari pada ψ = 0. Pemalar Γ dikenali sebagai kekuatan vorteks.
Pertimbangkan satu unsur kecil bendalir di antara dua garis arus, Rajah 2.17, di dalam
medan aliran mantap.
Rajah 2.17: Unsur bendalir dalam medan vorteks bebas.
Di jejari R daripada pusat kelengkungan tekanannya ialah p, sementara di jejari R + dR
pula ialah p + dp. Tujahan bersih (seunit ketebalan) ke atas unsur, menghala ke pusat
kelengkungan, ialah
(p + dp)(R + dR) dθ−
pR dθ − 2
(
p +dp
2
)
dR sindθ
2
Dengan mengabaikan sebutan-sebutan kecil order tinggi, tujahan bersih ini dipermu-
dahkan menjadi R dp dθ.
Komponen berat unsur yang bertindak sepanjang jejari dan menghala keluar ialah
R dθ dR ρgdz
dR= Rρgdθdz
dengan dz ialah unjuran tegak dR supaya lengkok cos(dz/dR) membentuk sudut di an-
tara jejari dan arah tegak. Oleh itu jumlah daya yang bertindak ke dalam ialah
R dp dθ + Rρg dθ dz = Jisim× Pecutan memusar
= ρR dθ dRv2
R

BAB 2. ALIRAN BENDALIR UNGGUL 43
Bahagikan dengan Rρg dθ
dp
ρg+ dz =
v2
R
dR
g(2.38)
Teorem Bernoulli untuk aliran mantap bendalir tanpa geseran memberikan
p
ρg+
v2
2g+ z = H
dengan H adalah turus yang malar sepanjang sesuatu garis arus (walaupun nilai ini ber-
ubah dari satu garis arus ke garis arus yang lain). Kebezakan persamaan di atas
dp
ρg+
2v dv
2g+ dz = dH (2.39)
Gabungkan persamaan (2.38) dan (2.39)
dH =vdv
g+
v2dR
Rg=
v
g
(dv
dR+
v
R
)
dR
Tetapi vdR = dψ, dan daripada persamaan (2.34),
dv
dR+
v
R= ζ
Oleh itu
dH = ζdψ
g(2.40)
2.12.5 Vorteks berputar atau paksa
Gerakan bendalir vorteks paksa diperolehi apabila bendalir di‘paksa’ berputar seperti
suatu jasad pejal sekitar suatu pusat. Oleh kerana daya kilas luar diperlukan bagi me-
mulakan gerakan, sebutan ‘vorteks paksa’ digunakan.
Halaju di jejari R dari pusat putaran diberikan oleh ωR, dengan ω mewakili halaju sudut
yang seragam. Gantian v = ωR ke dalam persamaan aliran mantap (2.38) memberikan
dp
ρg+ dz = ω2R
dR
g
Kamilkan persamaan di atas
p
ρg=
ω2R2
2g+ pemalar
iaitu
p∗ =ρω2R2
2+ pemalar (2.41)
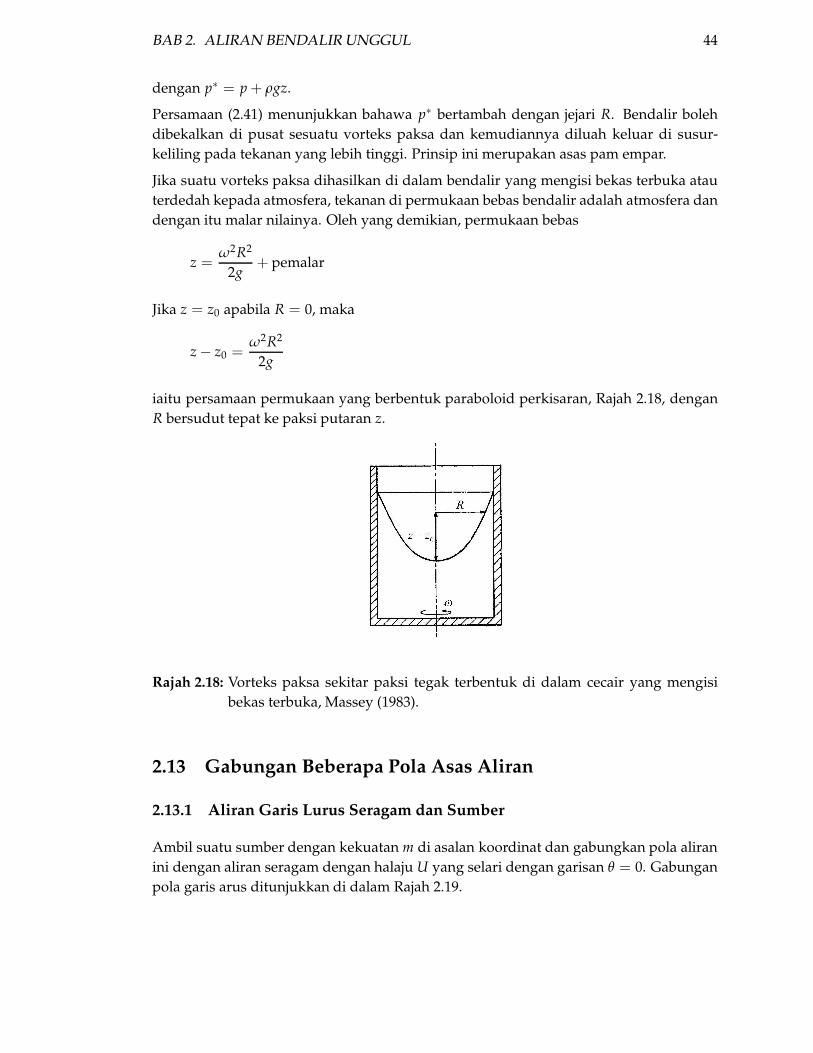
BAB 2. ALIRAN BENDALIR UNGGUL 44
dengan p∗ = p + ρgz.
Persamaan (2.41) menunjukkan bahawa p∗ bertambah dengan jejari R. Bendalir boleh
dibekalkan di pusat sesuatu vorteks paksa dan kemudiannya diluah keluar di susur-
keliling pada tekanan yang lebih tinggi. Prinsip ini merupakan asas pam empar.
Jika suatu vorteks paksa dihasilkan di dalam bendalir yang mengisi bekas terbuka atau
terdedah kepada atmosfera, tekanan di permukaan bebas bendalir adalah atmosfera dan
dengan itu malar nilainya. Oleh yang demikian, permukaan bebas
z =ω2R2
2g+ pemalar
Jika z = z0 apabila R = 0, maka
z− z0 =ω2R2
2g
iaitu persamaan permukaan yang berbentuk paraboloid perkisaran, Rajah 2.18, dengan
R bersudut tepat ke paksi putaran z.
Rajah 2.18: Vorteks paksa sekitar paksi tegak terbentuk di dalam cecair yang mengisi
bekas terbuka, Massey (1983).
2.13 Gabungan Beberapa Pola Asas Aliran
2.13.1 Aliran Garis Lurus Seragam dan Sumber
Ambil suatu sumber dengan kekuatan m di asalan koordinat dan gabungkan pola aliran
ini dengan aliran seragam dengan halaju U yang selari dengan garisan θ = 0. Gabungan
pola garis arus ditunjukkan di dalam Rajah 2.19.

BAB 2. ALIRAN BENDALIR UNGGUL 45
Rajah 2.19: Gabungan aliran garis lurus dan sumber, Massey (1983).
Halaju daripada sumber, m/(2πr), yang menghala keluar susut dengan bertambahnya
jejari. Jadi di suatu titik di kiri O, halaju ini akan mencapai nilai yang sama, tetapi ber-
lawanan arah, dengan halaju arus seragam, U; menjadikan halaju gabungan di titik ini
sifar. Titik ini dinamai titik genangan. Di titik ini
m
2πr= U =⇒ r =
m
2πU
Bendalir yang keluar daripada sumber tidak berdaya bergerak melepasi S, dan seterus-
nya mencapah daripada paksi θ = π dan seterusnya dibawa arus ke kanan.
Denganmencampurkan fungsi arus untuk aliran seragam dan fungsi arus untuk sumber,
kita memperolehi aliran gabungan sebagai
ψ = −Uy +
(
−mθ
2π
)
= −Ur sin θ − mθ
2π
Di titik genangan, y = 0 dan θ = π; dengan itu nilai ψ di situ ialah −m/2 yang mesti
malar sepanjang garis arus yang sepadan dengan kontor jasad. Kontor ini ditakrif oleh
rumus
−Uy− mθ
2π= −m
2
dan mengunjur ke nilai tak terhingga ke kanan, dengan nilai asimptot y diberikan oleh
m/2U apabila θ → 0 atau −m/2U apabila θ → 2π.
Komponen halaju di sebarang titik di dalam aliran diberikan oleh
vt =∂ψ
∂r= −U sin θ
vr = − ∂ψ
r∂θ= +U cos θ +
m
2πr

BAB 2. ALIRAN BENDALIR UNGGUL 46
Jasad yang kontornya terbentuk oleh gabungan aliran garislurus linear dengan suatu
sumber begini dikenali sebagai separuh jasad.
2.13.2 Gabungan sumber dan sinki yang setanding kekuatan
Rajah 2.20: Gabungan sumber, A, dan sinki, B, yang setanding kekuatan, Massey (1983).
Jika kekuatan sumber di A ialah m dan kekuatan sinki di B pula ialah −m, maka fungsi
arus aliran gabungan ialah
ψ = −mθ12π
+mθ22π
=m
2π(θ2 − θ1) (2.42)
Untuk sebarang titik P di dalam medan aliran,
|θ2 − θ1| = ∠APB
Garisan-garisan yang ψ nya malar (iaitu garis-garis arus) dengan itu melengkung sepan-
jang lengkung yang ∠APB malar, iaitu lengkok bulat dengan AB sebagai perentas asas.
Jika A berada di (−b, 0) dan B di (b, 0) maka
tan θ1 =y
x + bdan tan θ2 =
y
x− b
Oleh itu
tan(θ2 − θ1) =tan θ2 − tan θ11+ tan θ2 tan θ1
=y/(x− b) − y/(x + b)
1+ [y2/(x2 − b2)]
=2by
x2 − b2 + y2

BAB 2. ALIRAN BENDALIR UNGGUL 47
dan daripada persamaan (2.42),
ψ =m
2πarctan
2by
x2 − b2 + y2(2.43)
dengan
(
0 < arctan2by
x2 − b2 + y2≤ π
)
untuk y > 0
(
−π ≤ arctan2by
x2 − b2 + y2≤ 0
)
untuk y < 0
2.13.3 Sumber dan sinki yang setanding kekuatan digabungkan dengan alir-
an garis lurus
Rajah 2.21: Sumber dan sinki yang setanding kekuatan digabungkan dengan aliran garis
lurus, Massey (1983).
Aliran seragammengalir dengan halaju U yang selari dengan garisan θ = 0. Fungsi arus
gabungan yang terhasil ialah
ψ = −Uy +m
2π(θ2 − θ1)
= −Uy +m
2πarctan
2by
x2 − b2 + y2
Dengan sumber di kiri asalan, suatu titik genangan dijangkakan di hulu sumber, dan
titik genangan kedua di hilir sinki. Jika titik genangan berada di jarak s dariO sepanjang
paksi-x, halaju gabungan di situ ialah
U− m
2π(s− b)+
m
2π(s + b)= 0
dengan itu
s = ±b
√
1+m
πUb

BAB 2. ALIRAN BENDALIR UNGGUL 48
Di titik-titik genangan, y = 0 dan θ2 − θ1 = 0 jadi ψ = 0, iaitu kesemua titik ini ber-
ada di atas garisan ψ = 0 yang simetrikal sekitar kedua-dua paksi, rujuk Rajah 2.21.
Garisan ψ = 0 ini selalunya dikenali sebagai oval Rankine, mengambil sempena nama
W. J. M. Rankine (1820–1872) yang merupakan penyelidik pertama membangunkan tek-
nik menggabung pola-pola aliran.
2.13.4 Kembar
Jika sumber dan sinki di dalam Rajah 2.20 didekatkan tetapi hasil darab m× 2b dikekal-
kanmalar dan terhingga nilainya, pola yang terhasil dikenali sebagai kembar atau dwipola.
Sudut APB menjadi sifar dan garis-garis arus menjadi bulatan yang tangen ke paksi-x.
Dari persamaan (2.43), apabila 2b → 0,
ψ → m
2π
( 2by
x2 − b2 + y2
)
→ Cy
x2 + y2
=Cr sin θ
r2=
C sin θ
r(2.44)
dengan r dan θ adalah koodinat kutub dan
C = pemalar =mb
π
2.13.5 Kembar dan Aliran Garis lurus Seragam
Rajah 2.22: Kembar dan aliran garis lurus seragam, Massey (1983).
Jika suatu kembar di asalan dengan paksi x negatifnya digabungkan dengan aliran ga-
rislurus seragam dalam arah x positif, fungsi arus paduan ialah
ψ = −Uy +C sin θ
r
= −Ur sin θ +C sin θ
r(2.45)

BAB 2. ALIRAN BENDALIR UNGGUL 49
Apabila sumber dan sinki bersatu untuk membentuk kembar, oval Rankine menjadi su-
atu bulatan. Persamaan (2.45) menunjukkan bahawa garisarus ψ = 0 ditemui apabila
θ = 0, θ = π atau C = Ur2.
Sepanjang paksi-x, ψ = 0 dan
r =
√
C
U= pemalar
Dengan
C
U= a2 (2.46)
persamaan (2.45) menjadi
ψ = −U(
r− a2
r
)
sin θ (2.47)
Halaju aliran gabungan ini diberikan oleh
vr = −1
r
∂ψ
∂θ= U
(
1− a2
r2
)
cos θ
vt =∂ψ
∂r= −U
(
1+a2
r2
)
sin θ

Bab 3
ALIRAN BOLEH MAMPAT SATU
DIMENSI
3.1 Bendalir Tak Boleh Mampat dan Boleh Mampat
Bendalir tak boleh mampat tidak wujud dalam praktis. Sebutan ini sebenarnya digunakan
untuk merujuk kepada bendalir yang, apabila dikenakan tekanan, mengalami perubah-
an ketumpatan yang terlalu kecil sehingga boleh diabaikan. Ini berlaku dalam hampir
semua kes yang melibatkan cecair.
Gas juga boleh dianggap tidak boleh mampat sekiranya perubahan tekanan kecil diban-
dingkan dengan tekanan mutlak. Aliran udara di dalam sistem pengalihudaraan adalah
contoh kes gas yang dikira tak boleh mampat kerana perubahan tekanannya begitu kecil
untuk memberikan sebarang kesan ke atas ketumpatannya. Begitu juga dengan pesa-
wat udara yang terbang pada kelajuan 400 km/j; ketumpatan udara masih boleh dikira
malar. Tetapi bagi objek yang bergerak di dalam udara yang menghampiri laju bunyi
(1150 km/j), tekanan dan ketumpatan bendalir yang bersebelahan dengannya menga-
lami perubahan yang ketara dibandingkan dengan udara yang berada jauh dari objek;
dalam keadaan sebegini, udara mestilah dianggap sebagai bendalir boleh mampat.
3.1.1 Haba Tentu
Haba tentu ditakrif sebagai kuantiti haba yang diperlukan untuk meninggikan satu unit
suhu satu unit jisim bendalir,
c =dq
dT
dengan dq adalah haba yang ditambah ke satu unit jisim bendalir dan dT pula ialah
pertambahan suhu yang terhasil.
Nilai haba tentu bergantung kepada proses pertambahan haba; dua proses yang akan
50
BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 51
kita temui ialah pertambahan haba tentu pada isipadu malar dan tekanan malar. Jadi
cv =
(dq
dT
)
isipadu malar
(3.1a)
cp =
(dq
dT
)
tekanan malar
(3.1b)
Hubungan-hubungan di antara haba tentu, cp, cv, nisbah di antara kedua-duanya, γ, dan
pemalar gas, R, diberikan oleh
cp
cv= γ (3.2)
cp − cv = R (3.3)
cp =γ
γ − 1R (3.4)
cv =1
γ − 1R (3.5)
3.1.2 Persamaan Keadaan Gas Sempurna
Gas sempurna ditakrif sebagai bendalir yang mempunyai haba tentu yang malar dan
mematuhi hukum
p = ρRT (3.6)
dengan p dan Tmasing-masing adalah tekanan dan suhumutlak, ρ ketumpatan bendalir
dan R pula ialah pemalar gas. Persamaan (3.6) dikenali sebagai persamaan keadaan untuk
gas sempurna.
3.1.3 Proses-proses Termodinamik Gas Sempurna
Proses isotermal. Mampatan dan pengembangan gas boleh berlaku dengan mematuhi
berbagai hukum termodinamik. Jika suhu dikekal malar, proses ini dikenali seba-
gai isotermal dan hubungan tekanan-ketumpatan diberikan oleh hukum Boyle
p
ρ= pemalar (3.7)
Proses adiabatik. Jika proses berlaku tanpa haba ditambah atau dikeluarkan daripada
bendalir (iaitu pemindahan haba adalah sifar), proses ini dinamai adiabatik. Jika
proses adiabatik ini juga bolehbalik (iaitu tanpa geseran), ia disebut isentropik kera-
na proses tidak mengalami perubahan entropi.
Hubungan tekanan-ketumpatan bagi proses isentropik diberikan oleh
p
ργ= pemalar (3.8)
dengan γ = cp/cv; nisbah haba tentu.

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 52
Proses politropik. Kita boleh mengungkapkan satu hubungan umum di antara tekanan
dan ketumpatan untuk setiap proses di atas menerusi satu persamaan umum,
p
ρn= pemalar (3.9)
dengan indeks n berbeza untuk setiap proses. Jika
1. n = 0, p = pemalar, proses isobarik,
2. n = 1, T = pemalar, proses isotermal,
3. n = γ, s = pemalar, proses isentropik.
3.2 Kebolehmampatan
Kebolehmampatan adalah ukuran perubahan isipadu (atau ketumpatan) apabila tekan-
an bertindak ke atas sesuatu bahan. Ukuran ini diwakili oleh pekali kebolehmampatan, β.
Sementara itu, bendalir mungkin dimampatkan apabila tekanan bertindak ke atasnya
dan ini mengurangkan isipadu di samping menghasilkan terikan isipadu. Bendalir yang
termampat begini akan kembali kembang kepada isipadu asalnya sebaik sahaja tindak-
an tekanan dihilangkan. Sifat kebolehmampatan sesuatu bendalir ini dirumuskan oleh
modulus keanjalan pukal, κ, yang juga merupakan kebalikan pekali kebolehmampatan;
κ =1
β
Sekiranya tokokan tekanan dp menyebabkan berlaku kesusutan isipadu dV, maka mo-
dulus keanjalan pukal boleh ditulis sebagai
κ = − dp
dV/V(3.10)
dengan V sebagai isipadu asal bendalir. Modulus keanjalan pukal tidak malar tetapi
bertambah dengan bertambahnya tekanan.
Daripada takrif ketumpatan kita memperolehi
ρ =m
V
Oleh kerana jisim m bagi sesuatu isipadu V malar, ρ boleh dibezakan menjadi
dρ = d(m
V
)
= −mdV
V2= −ρ
dV
V
atau
−dV
V=
dρ
ρ(3.11)
Daripada persamaan (3.10) and (3.11),
κ = ρdp
dρ(3.12)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 53
• Untuk proses isotermal,
p
ρ= pemalar
Oleh itu
dp
dρ= pemalar =
ρ
p
dan modulus keanjalan pukal
κ = p (3.13)
• Untuk proses isentropik,
p
ργ= pemalar
Bezakan, dp = pemalar
γργ−1dρ = γργ−1dρp
ργ= γ
dρ
ρp
Oleh itu
dp
dρ= γ
(p
ρ
)
dan modulus keanjalan pukal
κ = ργ
(p
ρ
)
= γp (3.14)
Halaju bunyi menerusi bendalir diungkapkan oleh
a =
√
dp
dρ(3.15)
Jadual 3.1: Modulus pukal air dan udara.
κ
Bendalir (×103 N/m2)
Udara (proses isotermal) 100
Udara (proses isentropik) 140
Air 2.11
Gangguan-gangguan tekanan kecil bergerak menerusi bendalir pada kelajuan yang ber-
gantung kepadamodulus keanjalan pukal dan ketumpatan bendalir. Menerusi persama-

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 54
an (3.12) dan (3.15),
a =
√κ
ρ(3.16)
dengan a adalah halaju bunyi di dalam bendalir. Nilai-nilai modulus pukal κ untuk
udara dan air pada keadaan-keadaan piawai dijadualkan di dalam Jadual 3.1.
3.3 Beberapa Konsep Asas Termodinamik
3.3.1 Proses Bolehbalik dan Tak Bolehbalik
Apabila sifat-sifat fizikal sesuatu bendalir (seperti tekanan, suhu dan ketumpatan) diu-
bah, sistem dikatakan telah mengalami satu proses. Proses ini dikatakan bolehbalik seki-
ranya bendalir dan persekitarannya dapat dikembalikan sepenuhnya kepada keadaan-
keadaan asal dengan menambah (atau mengeluarkan balik) jumlah haba dan kerja yang
telah dikeluarkan (atau ditambah) semasa proses tadi berlaku.
Proses bolehbalik adalah satu proses unggul yang sama sekali tidak mungkin dicapai da-
lam praktis. Kesan-kesan likat dan geseran melesapkan tenaga mekanikal sebagai haba
yang tidak boleh ditukar kembali kepada tenaga mekanikal tanpa perubahan-perubahan
lain turut berlaku. Oleh yang demikian, dalam praktis semua proses adalah tak bolehba-
lik.
3.3.2 Tenaga Dalaman dan Entalpi
Tenaga molekul bendalir boleh mampat terhasil disebabkan oleh aktiviti molekul yang
bertambah dengan bertambahnya suhu. Di dalam sesuatu gas aktiviti molekul ini juga
menghasilkan tekanan yang mewakili sebahagian daripada tenaga molekul yang bia-
sanya ditukarkan kepada kerja mekanikal. Dalam termodinamik, tenaga molekul ini
dikenali sebagai entalpi
h = u + pv = u +p
ρ(3.17)
dengan h adalah entalpi atau tenaga molekul seunit jisim, v ialah isipadu tentu (= V/m),
u ialah tenaga dalaman seunit unit jisim, iaitu sebahagian tenaga molekul yang bukan
terhasil daripada tenaga tekanan seunit jisim p/ρ. Tenaga dalaman adalah tenaga kinetik
molekul dan daya-daya di antara molekul yang bergantung kepada suhu; suhu rendah
atau tinggi memberikan tenaga dalaman sepadan yang rendah atau tinggi.
3.3.3 Hukum Pertama Termodinamik
Hukum ini mewakili prinsip keabadian tenaga. Ia menyatakan bahawa
tenaga tidak boleh dicipta atau dimusnahkan tanpa proses nuklear, tetapi boleh diubah
bentuknya.

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 55
Ujikaji telah menunjukkan bahawa haba adalah satu bentuk tenaga yang boleh diungkap
dalam unit-unit tenaga mekanikal menerusi tenaga mekanikal yang setara dengan haba.
Jika satu kuantiti kecil tenaga ditambah kepada satu sistem homogeneous mudah (iai-
tu satu sistem yang terdiri daripada satu bendalir yang sifat-sifat termodinamiknya se-
ragam), tenaga ini, menerusi hukum pertama termodinamik, boleh ditukarkan kepada
pelbagai bentuk tenaga seperti pertambahan tenaga kinetik molekul (iaitu tenaga dalam-
an), pertambahan tenaga kinetik sistem, dan kerja (mekanikal) terlaku luaran.
Sekiranya sistem bendalir ini statik, hukum pertama termodinamik menyatakan bahawa
kuantiti kecil haba yang ditambah ke dalam sesuatu sistem mudah adalah sama dengan
perubahan tenaga kinetik molekul campur kerja mekanikal yang dilakukan oleh sistem.
Jadi
dq = du + dw (3.18)
dengan dq adalah kuantiti tenaga yang ditambah ke dalam sistem, du ialah tenaga da-
laman se unit jisim bendalir, dan dw kerja mekanikal terlaku oleh sistem.
Jika p tekanan dan v isipadu per unit jisim, persamaan (3.18) boleh ditulis dalam bentuk
dq = du + p dv = du + p d
(1
ρ
)
(3.19)
3.3.4 Entropi
Entropi sesuatu gas boleh ditakrif sebagai ukuran kebolehsediaan tenaga haba untuk
ditukarkan kepada kerja mekanikal. Jika dq adalah kuantiti haba yang diberikan kepada
bendalir per unit jisim, dan s adalah entropi per unit jisim bendalir, maka perubahan
dalam entropi per unit jisim disebabkan oleh haba yang diserap oleh bendalir ialah
ds =dq
T(3.20)
dengan T adalah suhu mutlak bendalir.
Jika dqe adalah tenaga haba per unit jisim yang ditambah dari luar dan dqi pula ialah
tenaga haba per unit jisim yang terbentuk di dalam sistem bendalir, maka jumlah tenaga
yang diterima oleh bendalir ialah
dq = dqe + dqi (3.21)
Daripada persamaan (3.20) dan (3.21), kita memperolehi
ds =dqeT
+dqiT
(3.22)
Entropi yang malar (iaitu ds = 0) memerlukan dq = 0. Keadaan ini boleh dicapai seki-
ranya tiada haba menembusi di antara bendalir dan persekitarannya (iaitu dqe = 0), dan
tiada tenagamekanikal yang ditukarkan kepada tenaga haba oleh geseran (iaitu dqi = 0).

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 56
Dalam praktis proses tanpa geseran sukar didapati jadi dqi , 0 dan jika tenaga haba dari
sumber luar sama dengan sifar (iaitu dqe = 0), maka untuk proses adiabatik
ds =dqiT
> 0 (3.23)
3.3.5 Hukum Kedua Termodinamik
Hukum kedua termodinamik adalah hasil pemerhatian dan ujian ujikaji yang boleh di-
simpulkan dalam bentuk fakta-fakta berikut:
• Haba tidak boleh dipindahkan daripada jasad suhu rendah kepada jasad suhu tinggi
tanpa perubahan-perubahan lain di dalam kedua-dua sistem berlaku serentak.
• Haba daripada satu sumber tunggal tidak boleh ditukarkan kepada kerja meka-
nikal tanpa perubahan-perubahan lain di dalam sistem dan persekitaran berlaku
serentak.
• Pemindahan tenaga daripada kerja mekanikal kepada tenaga haba adalah tak bo-
lehbalik.
• Di dalam sesuatu sistem yang terasing (iaitu tiada pemindahan haba), entropi tidak
boleh susut. Entropi selalu bertambah jika proses tak bolehbalik.
3.4 Parameter yang Mengawal Aliran Boleh Mampat
Terdapat empat parameter yang mengawal fenomena aliran bendalir likat boleh mampat,
iaitu
1. nisbah haba tentu,
2. nombor Mach,
3. nombor Reynolds, dan
4. nombor Prandtl.
Nisbah haba, γ, ialah nisbah
haba tentu bendalir pada tekanan malar
haba tentu bendalir pada isipadu malar
atau
γ =cp
cv(3.24)
yang merupakan ukuran kekusutan zarah-zarah bendalir.

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 57
Nombor Mach, M, mewakili ukuran kesan kebolehmampatan dan ditakrif sebagai nis-
bah halaju arus bebas (atau halaju jasad menerusi bendalir) dan halaju bunyi di dalam
bendalir. Ia diungkapkan sebagai
M =v
a(3.25)
dengan v adalah halaju bendalir (atau halaju jasad yang bergerak) dan a pula ialah halaju
bunyi di dalam bendalir. Untuk aliran isentropik, persamaan (3.12) dan (3.13) mengha-
silkan
a =
√γp
ρ=√
γRT (3.26)
Nombor Reynolds, Re, adalah satu ukuran kesan likat bendalir, sementara nombor Pran-
dtl, Pr, pula adalah ukuran peri mustahaknya pengaliran haba dan kelikatan bendalir. Ia
adalah nisbah kelikatan kinematik dan kemeresapan haba1 bendalir,
Pr =µ/ρ
K/ρcp(3.27)
dengan K adalah keberaliran haba2.
Bagi pemodelan aliran boleh mampat di sekitar dua jasad yang serupa, kedua-dua jasad
mestilah serupa secara geometri dan keempat-empat paramater yang dihuraikan di atas
mestilah sama;
γmodel = γprototaip
Mmodel = Mprototaip
Prmodel = Prprototaip
Remodel = Reprototaip
Bagi aliran boleh mampat yang tak likat, faktor nombor Reynolds dan nombor Prandtl
boleh diabaikan; yang perlu diambilkira ialah nisbah haba tentu dan nombor Mach.
3.5 Regim-regim Aliran Boleh Mampat
Berdasarkan nilai nombor Mach, lima regim aliran biasanya dikelaskan seperti berikut
(Hodge & Koenig, 1995):
Aliran Tak Boleh Mampat: Nombor Mach kecil berbanding dengan satu, biasanya (0 <
M < 0.3) untuk gas sempurna. Dalam julat ini, kesan kebolehmampatan selalunya
abaikan.
Aliran Subsonik: Nombor Mach masih lagi kurang daripada satu tetapi berada di luar
julat aliran tak boleh mampat, julat (0.3 < M < 1.0).
1thermal diffusivity2thermal conductivity

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 58
Aliran Transonik: Nombor Mach adalah di sekitar satu, iaitu kurang sedikit atau lebih
sedikit, menurut julatnya (0.8 < M < 1.2).
Aliran Supersonik: Nombor Mach melebihi satu, (M > 1).
Aliran Hipersonik: Nombor Mach jauh melebihi satu, (M >> 1.0). Nilai nombor Ma-
ch yang memisahkan regim supersonik daripada regim hipersonik adalah dalam
sekitar 5.
3.6 Kon Mach, Garis Mach dan Gelombang Kejutan
Sesuatu gangguan tekanan (atau denyutan tekanan) di dalam bendalir boleh mampat
yang pegun diperambatkan pada kelajuan bunyi secara seragam dalam semua arah. De-
ngan itu kita boleh menyatakan bahawa gangguan tekanan diperambatkan sebagai satu
permukaan gelombang yang berbentuk sfera.
Pertimbangkan satu objek kecil (misalnya, projektil) yang bergerak dari kanan ke kiri di
dalam bendalir pegun dengan halaju yang lebih kecil dari halaju bunyi (0 < v < a). Ge-
rakan objek ini menghasilkan gangguan tekanan yang diperambatkan, secara sfera, me-
nuju keluar daripada objek dengan halaju bunyi a. Jika objek ini tidak bergerak (relatif ke
bendalir), muka gelombang akan tersebar secara sfera dan akan mempunyai kedudukan
yang ditunjukkan di dalam Rajah 3.1 bagi jedamasa berturutan dt = (t2 − t1) = (t3 − t2).
Kedudukanmuka gelombang untuk 0 < v < a ditunjukkan di dalam Rajah 3.1. Bahagian
gelombang di hadapan objek bergerak lebih perlahan dari bahagian belakang; halaju di
hadapan objek ialah (a− v).
Jika halaju objek bertambah sehingga nilai halaju bunyi, v = a, rujuk Rajah 3.1, muka
gelombang tidak bergerak terlebih ke hadapan daripada objek itu sendiri tetapi tampak
seolah-olah pegun. Muka-muka gelombang bergabung untuk membentuk satah muka
gelombang yang tangen ke bahagian hulu sementara gelombang hilir bergerak pada kela-
juan (v+ a). Dalam kes ini, gelombang tekanan tidak berupaya bergerak ke hulu melaw-
an aliran yang menghampiri objek, dan bendalir di hadapan satah muka gelombang ini
tidak terpengaruh oleh gerakan objek.
Apabila halaju objek melebihi halaju bunyi, v > a dan M > 1, setiap gelombang tekanan
bergabung untuk membentuk muka gelombang yang berbentuk kon. Bentuk kon muka
gelombang ini dikenali sebagai kon Mach, Rajah 3.1. Bendalir di hadapan kon ini tidak
terganggu tetapi secara mendadak mengalami perubahan tekanan, suhu dan ketumpatan
apabila ia melewati kon Mach. Garis pemisah di antara bendalir di hulu yang belum
terganggu dan bendalir yang mengalami perubahan mendadak ini membentuk satu ga-
risan maya yang dikenali sebagai garisan gelombang kejutan.
Sudut separuh-vertek kon Mach, dikenali juga sebagai sudut Mach, diberikan oleh hu-
bungan
sin α =a
v(3.28)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 59
Rajah 3.1: Kon Mach, Fox & McDonald (1985).
Dalam dua dimensi, konMach menjadi sepasang garisan, setiap satu dipanggil garis Ma-
ch atau gelombang Mach, yang saling memintas. Daripada persamaan (3.28), jelas bahawa
nombor Mach,
M =v
a=
1
sin α(3.29)
3.7 Persamaan-persamaanMenakluk Aliran Boleh Mampat
Dalam kajian aliran tak boleh mampat kita hanya perlu mencari halaju dan tekanan di
setiap titik dalam ruang yang dikaji. Dalam aliran boleh mampat kita perlu menentukan
halaju, tekanan, ketumpatan dan suhu bendalir (satu kuantiti vektor dan tiga kuantiti
skalar). Untuk menentukan keempat-empat kuantiti ini kita memerlukan satu persama-
an vektor dan tiga persamaan skalar. Kesemua persamaan yang diperlukan ini dibekalk-
an oleh
1. persamaan keadaan untuk gas sempurna,
2. persamaan keterusan,

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 60
3. persamaan momentum, dan
4. persamaan tenaga.
3.7.1 Persamaan keadaan
Untuk gas sempurna, persamaan keadaan diberikan oleh persamaan (3.6)
p = ρRT
3.7.2 Persamaan keterusan
Persamaan keterusan umum di dalam koordinat kartesan bagi aliran bendalir boleh
mampat boleh ditulis sebagai
∂p
∂t+
∂(ρu)
∂x+
∂(ρv)
∂y+
∂(ρw)
∂z= 0 (3.30)
Kadar aliran jisim sepanjang satu tiub arus yang sempit boleh diungkapkan sebagai
ρAv = pemalar (3.31)
Dengan membezakan persamaan (3.31) dan membahagikannya dengan ρAv, kita men-
dapat
dρ
ρ+
dA
A+
dv
v= 0 (3.32)
3.7.3 Persamaan momentum (Persamaan Euler)
Persamaan Euler diperolehi menerusi hukum pengabadian momentum. Daya bersih ke
atas isipadu kawalan dalam arah-x ialah
Fx = pA− (p + dp)(A + dA) + 12 [p + (p + dp)][(A + dA) − A]− dFµ (3.33)
Sebutan 12 [p + (p + dp)][(A + dA) − A] mewakili komponen daya disebabkan tekanan
yang bertindak ke atas permukaan luar yang melengkung dalam arah-x. Susun semula
persamaan (3.33) sambil mengabaikan sebutan-sebutan order tinggi seperti (dp dA) bagi
mendapat
Fx = −A dp− dFµ (3.34)
Perbezaan di antara kadarmomentum yangmeninggalkan isipadu kawalan, Mkeluar, dan
kadar momentum yang memasuki isipadu kawalan, Mmasuk, diberikan oleh
Mkeluar − Mmasuk = ∆M = ρ v A[(v + dv) − v] = ρ v A dv (3.35)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 61
Hukum pengabadian momentum memerlukan supaya daya bersih, Fx, yang bertindak
ke atas isipadu kawalan sama dengan kadar perubahan momentum ∆M, jadi
Fx = ∆M
atau
−A dp− dFµ = ρ v A dv (3.36)
Jika kesan geseran diabaikan, iaitu dFµ = 0, persamaan (3.36) menjadi
dp
ρ+ v dv = 0 (3.37)
3.7.4 Persamaan tenaga
Sungguh pun persamaan momentum bebas daripada kesan kebolehmampatan, persa-
maan tenaga amat bergantung kepada perubahan ketumpatan. Persamaan tenaga yang
umum untuk aliran mantap sebarang bendalir diberikan sebagai
q =
(p2ρ2
+v222
+ gz2
)
−(p1ρ1
+v212
+ gz1
)
+ (u2 − u1) + w (3.38)
dengan q adalah haba yang dibekalkan kepada sistem bendalir per unit jisim, w ialah
kerja terlaku oleh bendalir per unit jisim,
q =Q
ρ1A1v1
w =W
ρ1A1v1
dan Q ialah haba per saat yang dibekalkan kepada sistem danW adalah kerja terlaku per
saat.
Persamaan (3.38) boleh digunakan di sebarang dua titik sepanjang satu garisarus. Jika
tiada haba ditambah ke dalam (atau disari keluar) bendalir di antara dua titik ini, dan
tiada kerja mekanikal dilakukan, kita boleh meletak q = 0 dan w = 0 ke dalam persama-
an (3.38) dan mendapat
0 =
(p2ρ2
+v222
+ gz2
)
−(p1ρ1
+v212
+ gz1
)
+ (u2 − u1) (3.39)
Oleh kerana entalpi per unit jisim diberikan oleh persamaan (3.17) sebagai
h = u +p
ρ
persamaan (3.39) boleh dipermudahkan kepada
h +v2
2+ gz = pemalar (3.40)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 62
Persamaan (3.40) mewakili bentuk am persamaan tenaga untuk sistem aliran adiabatik,
mantap yang bendalirnya (cecair, gas atau wap) tidak melakukan kerja ke atas perseki-
taran atau sebaliknya.
Jika bendalir adalah gas sempurna,
h = cpT
persamaan (3.40) menjadi
cpT +v2
2+ gz = pemalar (3.41)
Dari persamaan keadaan untuk gas sempurna,
p = ρRT atau T =p
ρR=
p
ρ(cp − cv)
Gantikan untuk T di dalam persamaan (3.41)
cp
cp − cv
p
ρ+
v2
2+ gz = pemalar (3.42)
Menerusi cp/cv = γ, persamaan (3.42) menjadi
γ
γ − 1
p
ρ+
v2
2+ gz = pemalar (3.43)
Tenaga upayawujud kerana ketinggian aras bendalir. Jika bendalir yangmengalir adalah
sejenis gas, sebutan tenaga upaya biasanya terlalu kecil dibandingkan dengan sebutan-
sebutan lain kerana berat tentu gas yang sangat kecil. Jadi sebutan tenaga upaya, gz, di
dalam persamaan (3.43) selalunya diabaikan, menjadikan
γ
γ − 1
p
ρ+
v2
2= pemalar (3.44)
dan persamaan (3.40) menjadi
h +v2
2= pemalar (3.45)
Persamaan (3.44) lebih bermakna apabila diungkapkan dalam sebutan suhu, menerusi
p = ρRT untuk menjadikannya
γ
γ − 1RT +
v2
2= pemalar (3.46)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 63
3.8 Pembolehubah Aliran dalam Sebutan Nombor Mach
Dari rumus halaju bunyi kita tahu
a2 =dp
dρ
dan darinya
dρ =1
a2dp (3.47)
Jika kita hadkan analisis berikut kepada aliran isentropik gas sempurna dengan
p = pemalar× ργ dan p = ρRT
kita mendapat
T = pemalar× p(γ−1)/γ
Bezakan dan hapuskan pemalar,
dT
T=
γ − 1
γ
dp
p(3.48)
Perubahan-perubahan dalam halaju, tekanan, suhu dan ketumpatan boleh dirumus da-
lam sebutan nombor Mach. Untuk mendapatkan hubungan-hubungan ini persamaan-
persamaan keterusan, keadaan untuk gas sempurna, aliran isentropik dan tenaga digu-
nakan.
Bagi perubahan tekanan, kita boleh menulis
dp
p=
−γM2
1+γ − 1
2M2
dM
M(3.49)
dan perubahan suhu,
dT
T=
−(γ − 1)M2
1+γ − 1
2M2
dM
M(3.50)
Perubahan ketumpatan diberikan oleh
dρ
ρ=
−M2
1+γ − 1
2M2
dM
M(3.51)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 64
sementara perubahan luas pula oleh
dA
A=
−(1− M2)
1+γ − 1
2M2
dM
M(3.52)
Persamaan (3.52) boleh dikamil bagi mendapatkan satu hubungan di antara luas leher
genting, A∗ (iaitu titik nombor Mach bernilai satu) dan luas A di sebarang keratan di
mana M <> 1.
A
A∗ =1
M
(2+ (γ − 1)M2
γ + 1
) γ+12(γ−1)
(3.53)
Persamaan (3.53) unik kerana nombor Mach ditentukan oleh nisbah luas dan γ sahaja.
3.9 Titik Genangan
Titik genangan adalah titik halaju sifar. Oleh kerana tekanan, suhu dan ketumpatan sa-
ling berkait di dalam aliran boleh mampat, sebarang perubahan tekanan akan memberi
kesan ke atas suhu. Tekanan di titik genangan dikenali sebagai tekanan genangan, p0.
Persamaan (3.44) dikenali sebagai persamaan tekanan untuk aliran nirputaran yang malar.
Jika p0 dan ρ0 adalah tekanan dan ketumpatan di titik yang bendalirnya pegun, persa-
maan (3.44) boleh diungkapkan sebagai
γ
γ − 1
p
ρ+
v2
2=
γ
γ − 1
p0ρ0
(3.54)
Persamaan (3.54) selalunya dirujuk sebagai persamaan tekanan atau persamaan Bernou-
lli bagi aliran adiabatik boleh mampat. Sementara itu persamaan (3.45) menghubungkan
entalpi dan halaju. Jika digantikan sebutan entalpi di dalam persamaan ini dengan se-
butan suhu (h = cpT), persamaan (3.45) menjadi
cpT +v2
2= pemalar (3.55)
Jika tekanan, suhu dan ketumpatan di titik genangan ini masing-masing ialah p0, T0, dan
ρ0, persamaan (3.55) boleh ditulis sebagai
cpT +v2
2= cpT0 (3.56)
Bahagikan persamaan (3.56) dengan cpT, kita memperolehi
1+v2
2cpT=
T0T
(3.57)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 65
3.9.1 Aliran isentropik gas sempurna
Terdahulu, kita telah pun menerbitkan untuk aliran isentropik gas sempurna,
p = ρRT (3.6)
p
ργ= pemalar (3.8)
dan dengan menghilangkan ρ dari persamaan (3.6) dan (3.8), kita boleh menulis
T2T1
=
(p2p1
)γ−1γ
(3.58)
Juga
cp =γ
γ − 1R (3.4)
a =√
γRT (3.26)
dan dengan itu, persamaan (3.57) kini mengambil bentuk
1+γ − 1
2
v2
a2=
T0T
(3.59)
dan seterusnya, dari takrif nombor Mach, kita boleh menulis
T0T
= 1 +γ − 1
2M2 (3.60)
Menerusi persamaan (3.58), nisbah tekanan genangan p0 ke tekanan arus yang tidak ter-
ganggu p (disebut juga tekanan statik boleh dikaitkan dengan nisbah suhu, T0/T dalam
persamaan (3.60):
p0p
=
(T0T
) γγ−1
=
(
1 +γ − 1
2M2
) γγ−1
(3.61)
Akhir sekali, nisbah ketumpatan genangan ρ0 ke ketumpatan statik ρ bagi aliran isentro-
pik ialah
ρ0ρ
=
(p0p
) 1γ
=
(
1+γ − 1
2M2
) 1γ−1
(3.62)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 66
3.9.2 Keadaan-keadaan genting
Sungguhpun keadaan genangan amat berguna sebagai keadaan rujukan bagi ciri-ciri ter-
modinamik, ia tidak begitu sesuai untuk situasi v = 0. Satu nilai rujukan yang sesuai
untuk halaju ialah laju genting—laju pada nombor Mach sama dengan satu. Walaupun
tidak ada sebarang titik di dalam aliran itu yang mengalami keadaan M = 1, keadaan
hipotesis ini amat baik dijadikan sebagai keadaan rujukan.
Jika kita gunakan bintang (*) sebagai mewakili keadaan-keadaan pada M = 1, kita boleh
mentakrif
v∗ = a∗ (3.63)
Bagi gas sempurna dengan γ = 1.4, persamaan-persamaan (3.60), (3.61) dan (3.62)
masing-masing menjadi
T0T∗ =
(
1+γ − 1
2
)
= 1.2 (3.64)
p0p∗
=
(
1+γ − 1
2
)γ/(γ−1)
= 1.893 (3.65)
dan
ρ0ρ∗
=
(
1+γ − 1
2
)1/(γ−1)
= 1.577 (3.66)
3.10 Aliran Menerusi Salur yang Berubah Luas
Dalam konsep aliran satu dimensi semua kuantiti aliran seperti halaju, tekanan, suhu
dan ketumpatan dianggap malar di sesuatu keratan rentas pembuluh aliran. Oleh yang
demikian aliran boleh dihurai dalam sebutan satu koordinat, iaitu jarak di sepanjang
paksi pembuluh, katalah x, dan masa t.
Tanpa geseran (iaitu aliran isentropik) halaju aliran tidak berubah. Kehadiran lapisan
sempadan membuatkan aliran bendalir yang sebenar bukan satu dimensi. Sungguh pun
demikian, bagi aliran yang tidak membentuk lapisan sempadan yang tebal, anggapan
aliran satu dimensi masih dapatmemberikan penyelesaian yang baik. Oleh kerana halaju
dan tekananmalar di sesuatu keratan rentas, suhu dan ketumpatan turutmalar menerusi
persamaaan (3.58)–(3.62).
Bagi keratan rentas yang luasnya A dan halaju v serta ketumpatan ρ malar, persamaan
keterusan aliran mantap
ρAv = pemalar
boleh dibezakan dan kemudiannya dibahagikannya dengan ρAv, untuk mendapat
dρ
ρ+
dA
A+
dv
v= 0

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 67
Jika perubahan luas keratan rentas yang ketara berlaku lalu mempengaruhi perubahan
dalam v dan ρ sepanjang jarak pembuluh yang pendek (seperti nozel), kesan geseran
boleh diabaikan. Persamaan gerakan Euler untuk aliran mantap tanpa geseran yang
mengabaikan graviti dan daya jasad, boleh ditulis sebagai
v dv +dp
ρ= 0 (3.67)
Darabkan persamaan (3.67) dengan dρ/dp, dan ambil halaju bunyi sebagai a2 = dp/dρ,
persamaan (3.67) menjadi
dρ
ρ+
v dv
a2= 0
Gantikan untuk dρ/ρ, dari persamaan (3.32),
dA
A+
dv
v=
v dv
a2atau
dA
A=
dv
v
(v2
a2− 1
)
yang boleh diungkap dalam sebutan nombor Mach
dA
A=
dv
v(M2 − 1) (3.68)
Satu persamaan yang serupa dengan persamaan (3.68) untuk perubahan tekanan dp bo-
leh ditentukan menerusi persamaan (3.32) dan (3.67). Dari persamaan (3.67)
dv
v= − dp
ρv2
Gantikan nilai dv/v ini ke dalam persamaan (3.32)
dρ
ρ− dp
ρv2+
dA
A= 0
yang menghasilkan
dA
A=
dp
ρv2− dρ
ρ=
dp
ρv2
(
1− v2dρ
dp
)
Oleh kerana
dp
dρ= a2
kita mendapat
dA
A=
dp
ρv2(1− M2
)
Selesaikan untuk dp
dp =1
1− M2
ρv2
AdA (3.69)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 68
Dari analisis yang dibuat setakat ini kita dapat melihat perubahan halaju, tekanan, suhu
dan ketumpatan dengan perubahan luas aliran untuk keadaan-keadaan aliran subsonik
dan supersonik. Rajah 3.2 menunjukkan perubahan pembolehubah aliran dengan luas
bagi aliran isentropik gas sempurna.
Rajah 3.2: Perubahan halaju dan tekanan dengan luas bagi aliran subsonik dan superso-
nik, John (1969).
Dalam aliran subsonik, pembaur atau peresap adalah salur mencapah sedangkan untuk
aliran supersonik pula pembaur mempunyai laluan menumpu.
3.10.1 Aliran Isentropik Menerusi Nozel Menumpu
Pertimbangkan gas yang mengalir menerusi satu nozel, Rajah 3.3. Jet bendalir bergerak
kerana wujud perbezaan tekanan yang bertindak ke atas bendalir.
Apabila nilai p2 hampir dengan nilai p1, aliran adalah subsonik keseluruhannya. Seki-
ranya nilai p2 dikurangkan, halaju jet bertambah. Selagi aliran kekal subsonik, halaju
jet akan bertambah disebabkan oleh kesusutan tekanan p2. Apabila jet mencapai halaju
bunyi di leher (M = 1), sebarang kesusutan tekanan hilir p2 tidak boleh diperambatkan
ke hulu; aliran menerusi nozel ketika ini menjadi bebas dari dipengaruhi oleh tekanan
p2 dan keadaan ini dinamai aliran tercekik.
Bagi aliran adiabatik bolehbalik yang mengalir dari keadaan-keadaan takungan p1, ρ1dan v1 = 0, persamaan (3.44) membawa ke satu ungkapan bagi halaju v di keratan yang
nilai tekanannya p sebagai
v =
√√√√
[
2γ
γ − 1
p1ρ1
(
1−(
p
p1
)(γ−1)/γ)]
(3.70)
Persamaan (3.70) boleh diguna untuk menentukan halaju leher bagi keadaan-keadaan

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 69
subsonik. Kadar aliran jisim yang sepadan
m = ρAv
Rajah 3.3: Aliran gas menerusi nozel menumpu, John (1969).
Bagi aliran adiabatik bolehbalik
ρ = ρ1
(p
p1
)1/γ
dan dengan itu
m = ρ1
(p
p1
)1/γ
Av
= A
√√√√
[
2γ
γ − 1p1ρ1
(p
p1
)2/γ(
1−(
p
p1
)(γ−1)/γ)]
(3.71)
Dalam persamaan (3.71), tekanan di leher ialah p = p2 selama keadaan belum menca-
pai tahap genting. Apabila nombor Mach di leher mencapai nilai satu, halaju, tekanan
dan ketumpatan di leher masing-masing menjadi nilai genting vc, pc dan ρc bagi aliran
tercekik. Oleh itu
vc =
√√√√
[
2γ
γ − 1
pcρ1
(
1−(pcp1
)(γ−1)/γ)]
(3.72)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 70
dan
mc = A
√√√√
[
2γ
γ − 1p1ρ1
(pcp1
)2/γ(
1−(pcp1
)(γ−1)/γ)]
(3.73)
Rajah 3.4: Kadar aliran jisim menerusi nozel menumpu, John (1969).
Oleh kerana bagi aliran tercekik, nombor Mach tempatan mencapai nilai satu, dan p2 =
pc, persamaan (3.61) apabila digunakan untuk keadaan-keadaan ini menghasilkan
pcp1
=
(2
γ + 1
)γ/(γ−1)
(3.74)
Bagi udara dengan γ = 1.4, nisbah genting
pcp1
=
(2
1.4+ 1
)3.5
= 0.528
Dengan itu kadar aliran jisim menerusi nozel menumpu diberikan oleh persamaan (3.71)
selama (p2 > 0.528 p1), dan oleh persamaan (3.73) apabila (p2 < 0.528 p1), Rajah 3.4.
3.10.2 Aliran Isentropik Menerusi Nozel Menumpu-Mencapah
Di dalam kebanyakan bahan rujukan aliran boleh mampat, nozel menumpu-mencapah
dinamai juga nozel de Laval sebagai mengambil sempena nama jurutera bangsa Sweden,
Carl de Laval, yang banyak membuat kajian ke atasnya.
Pertimbangkan satu nozel menumpu-mencapah, Rajah 3.5. Bendalir disimpan di dalam
takungan besar dan diluah keluar menerusi satu nozel menumpu-mencapah. Tekanan
p1 di dalam takungan adalah malar. Aliran di dalam nozel dianggap aliran isentropik
satu dimensi.

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 71
Rajah 3.5: Aliran gas menerusi nozel menumpu-mencapah, John (1969).
Untuk p2 = p1, rujuk lengkung 1 Rajah 3.5, tiada aliran di dalam nozel dan tekanan tidak
berubah dengan jarak x.
Untuk p2 < p1, rujuk lengkung 2 Rajah 3.5, aliran teraruh menerusi nozel dengan halaju
subsonik di dalam kedua-dua bahagian, menumpu dan mencapah, nozel. Rajah 3.5 me-
nerangkan kepada kita bahawa untuk aliran subsonik, tekanan susut di dalam bahagian
menumpu dan bertambah di dalam bahagian mencapah.
Rajah 3.6: Kadar aliran jisim menerusi nozel menumpu-mencapah, John (1969).

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 72
Apabila tekanan p2 terus dikurangkan lagi, lengkung 3 Rajah 3.5, kadar aliran jisim me-
nerusi nozel bertambah sehingga aliran sonik berlaku di kerongkongan, lengkung 4 Ra-
jah 3.5. Selepas ini, sebarang pengurangan tekanan p2 tidak boleh dikesan di hulu da-
ripada kerongkongan; jadi bagi semua tekanan yang lebih kecil dari tekanan lengkung
4, takungan akan terus menghantar bendalir pada kadar aliran jisim yang sama dengan
kadar aliran jisim lengkung 4, rujuk Rajah 3.6, dan taburan tekanan di dalam bahagian
menumpu tidak berubah.
Untuk semua tekanan yang lebih kecil dari tekanan lengkung 4, aliran di dalam nozel
menumpu-mencapah menjadi tercekik. Bagi tekanan di dalam takungan yang sama nila-
inya, nozel menumpu-mencapah tercekik pada tekanan belakang, p2, yang lebih tinggi
dibandingkan dengan nozel menumpu.
Jelas kepada kita setakat ini bahawa aliran supersonik boleh dicapai dengan menyam-
bung satu nozel menumpu-mencapah ke takungan bendalir yang besar (agar keadaan
genangan terhasil di dalamnya). Bendalir dalam keadaan genangan ini memasuki ba-
hagian menumpu nozel secara subsonik lalu dipecut di dalam bahagian ini. Titik sonik
mestilah berada di titik luas minimum, iaitu di kerongkongan. Aliran seterusnya me-
masuki bahagian mencapah nozel pada M = 1 dan dipecut secara supersonik di dalam
bahagian mencapah. Hanya nozel menumpu-mencapah yang berkeupayaan memecut
aliran dari keadaan pegun kepada keadaan supersonik.
Terdapat dua penyelesaian untuk sesuatu nisbah luas A/Ac; satu subsonik dan satu lagi
supersonik. Bagi nombor Mach kerongkongan sama dengan 1, aliran isentropik boleh
direncatkan ke halaju keluaran subsonik atau terus dipecut ke halaju supersonik di ke-
luaran nozel. Lengkung 4 adalah bersepadan dengan aliran subsonik di satah keluaran
nozel. Lengkung 5 pula bersepadanan dengan aliran supersonik di satah keluaran, iai-
tu jika tekanan belakang, p2, direndahkan ke nilai tekanan keluaran lengkung 5, tekanan
menyusut di dalam kedua-dua bahagian, menumpu danmencapah, nozel dengan halaju
supersonik dikeluaran nozel.
Bagi tekanan belakang, p2, yang bernilai di antara tekanan keluaran lengkung 4 dan leng-
kung 5, penyelesaian isentropik satu dimensi kepada persamaan gerakan tidak mungkin
diperolehi kerana aliran dalam julat ini melibatkan gelombang kejutan yang merupakan
suatu proses tak boleh balik.
3.11 Kejutan Normal
Perubahan mendadak dari keadaan-keadaan supersonik ke keadaan-keadaan subsonik
berlaku menerusi suatu gelombang. Nombor Mach dan halaju susut merentasi sesuatu
kejutan, tetapi tekanan, ketumpatan, suhu dan entropi mengalami pertambahan menda-
dak.
Dua jenis kejutan:
1. kejutan normal yang serenjang ke arah aliran, dan

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 73
2. kejutan serong3 yang menyendeng ke arah aliran.
Kejutan-kejutan normal dan serong boleh berinteraksi bagimembentuk pola kejutan. Ge-
lombang yang terjadi juga mungkin melekat atau terpisah dari jasad. Kejutan normal
mungkin berlaku di dalam paip, nozel mencapah, pembaur terowong angin supersonik
atau di hadapan jasad yang berhidung tumpul seperti “space shuttle”.
Aliran di hulu adalah supersonik (M1 > 1) dengan halaju v1, tekanan p1, ketumpatan
ρ1 dan suhu T1. Setelah melepasi gelombang kejutan, aliran menjadi subsonik (M2 < 1)
dengan halaju v2, tekanan p2, ketumpatan ρ2 dan suhu T2.
Berikut diperkenalkan analisis kejutan normal menggunakan persamaan- persamaan ke-
terusan, momentum, tenaga serta persamaan keadaan gas sempurna. Gelombang kejut-
an melibatkan lesapan tenaga; oleh itu ia bukan proses isentropik. Untuk analisis kejutan
normal berikut, kita menganggap bendalir adalah gas sempurna yang mengalami aliran
adiabatik di dalam salur yang luasnya malar (iaitu A1 = A2 = A).
3.11.1 Persamaan keterusan
Bagi aliran mantap, persamaan keterusan memberikan
ρ1A1v1 = ρ2A2v2
Oleh kerana A1 = A2, kita memperolehi
ρ1v1 = ρ2v2 (3.75)
Dengan menggunakan persamaan keadaan untuk gas sempurna dan menggantikan ha-
laju dengan nombor Mach
v = aM = M√
γRT
persamaan (3.75) boleh ditulis semula sebagai
p1M1
√γRT1
RT1=
p2M2√
γRT2RT2
atau
p1M1√T1
=p2M2√
T2(3.76)
3.11.2 Persamaan momentum
Dengan mengabaikan kesan geseran sempadan, persamaan momentum memberikan
daya tekanan = kadar aliran jisim× perubahan halaju
(p1 − p2)A = ρ1Av1(v2 − v1)
(p1 − p2) = ρ2v22 − ρ1v
21
3oblique shock

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 74
atau
p1 + ρ1v21 = p2 + ρ2v
22
p1 +p1v
21
RT1= p2 +
p2v22
RT2
Gantikan v = aM, dengan a =√
γRT, kita mendapat
p1 + γM21p1 = p2 + γM2
2p2
atau
p2p1
=1+ γM2
1
1+ γM22
(3.77)
Persamaan (3.77) mewakili nisbah tekanan statik menerusi kejutan normal. Oleh kerana
M1 > 1 dan M2 < 1, jelas dari persamaan (3.77) bahawa p2 > p1, iaitu tekanan statik
aliran yang merentas kejutan normal bertambah.
3.11.3 Persamaan tenaga
Bagi keadaan adiabatik kita boleh menulis
cpT1 +v212
= cpT2 +v222
dan T01 = T02
yang menunjukkan bahawa suhu genangan kekal malar menerusi kejutan normal. Dari
persamaan (3.60)
T0T
= 1 +γ − 1
2M2
Samakan suhu genangan di hulu dan hilir kejutan
T1
(
1 +γ − 1
2M2
1
)
= T2
(
1+γ − 1
2M2
2
)
atau
T2T1
=1 +
γ − 1
2M2
1
1 +γ − 1
2M2
2
(3.78)
Oleh kerana M1 > 1 dan M2 < 1, persamaan (3.78) menunjukkan bahawa T2 > T1, iaitu
suhu statik aliran yang merentas kejutan normal bertambah.
Dari persamaan (3.76)
p2p1
=M1
M2
√
T2T1
=M1
M2
1+γ − 1
2M2
1
1+γ − 1
2M2
2
1/2
(3.79)

BAB 3. ALIRAN BOLEHMAMPAT SATU DIMENSI 75
Jika disamakan persamaan (3.77) dan persamaan (3.79), kitamemperolehi satu hubungan
kuadratik di antara M1 dan M2. Dengan mengabaikan penyelesaian mudah yang jelas,
iaitu M1 = M2 bagi keadaan bebas kejutan, kita boleh menulis
M22 =
2+ (γ − 1)M21
2γM21 − (γ − 1)
(3.80)
iaitu apabila M1 bertambah, penyebut4 persamaan (3.80) membesar lalu menyebabkan
nilai M2 susut. Dengan menggantikan nilai M2, persamaan-persamaan berikut diperole-
hi
p2p1
=2γM2
1 − (γ − 1)
γ + 1(3.81)
T2T1
=[(γ − 1)M2
1 + 2][2γM21 − (γ − 1)]
(γ + 1)2M21
(3.82)
ρ2ρ1
=p2/p1T2/T1
=(γ + 1)M2
1
(γ − 1)M21 + 2
(3.83)
3.11.4 Kekuatan kejutan
Kekuatan kejutan ditakrif sebagai nisbah
pertambahan tekanan merentasi kejutan
tekanan hulu
iaitu
kekuatan kejutan =p2 − p1
p1=
p2p1
− 1
=2γ
γ + 1(M2
1 − 1) (3.84)
4denominator

Bab 4
PENGENALAN KEPADAMESIN
BENDALIR
4.1 Pengkelasan Mesin Hidraulik
Tenaga wujud dalam berbagai bentuk. Tenaga hidraulik adalah tenaga yang terdapat pa-
da bendalir dalam beberapa bentuk; kinetik, tekanan, upaya, terikan atau haba. Tenaga
mekanikal pula dikaitkan dengan bahagian-bahagian bergerak atau berputar mesin yang
menghantar kuasa. Dari sini diketahui bahawa tujuan atau kegunaanmesin hidraulik ia-
lah untuk memindahkan tenaga samada dari tenaga mekanikal ke tenaga hidraulik atau
sebaliknya.
Tenaga ditambah ke bendalir Bendalir digunakan sebagai Tenaga dikeluarkan daripada bendalir
(kerja terlaku ke atas bendalir) perantara pemindahan tenaga (kerja terlaku oleh bendalir)
Mesin-mesin Pam, kipas, pemampat Gandingan bendalir, penukar dayakilas Turbin
Rotodinamik Dua kategori: Dua kategori
a. Tanpa Bekas a. Dedenyut
Kipas Kincir angin
Skrew Roda Pelton
Turbin Turgo
b. Dengan Bekas
Aliran paksi
Aliran tercampur b. Tindakbalas
Aliran jejari/empar Aliran paksi (turbin Kaplan)
Aliran tercampur (turbin Francis)
Aliran jejari (turbin Banki dan rekabentuk awal Francis)
Mesin-mesin Pam, pemampat Ram hidraulik, jack press Motor:
Sesaran Positif Dua kategori: Omboh
a. Salingan Vane
Pacuan terus Gear
Pacuan engkol
Swashplate
b. Berputar
Skrew
Gear
Vane
Lobe
Rajah 4.1: Pengkelasan mesin-mesin bendalir.
76

BAB 4. PENGENALANKEPADAMESIN BENDALIR 77
4.1.1 Kriteria Pengkelasan
Jadual 4.1 menunjukkan dua kriteria yang biasa digunakan bagi tujuan pengkelasan
mesin-mesin bendalir.
4.1.1.1 Arah Pemindahan Tenaga
Di bawah kriteria ini terdapat tiga kelas.
1. Tenaga dikeluarkan daripada bendalir
Di dalam kategori ini tenaga hidraulik merupakan masukan yang ditukarkan ke-
pada tenaga mekanikal iaitu kuasa pada aci mesin sebagai keluaran. Di sini kerja
dilakukan oleh bendalir dan tenaga dikeluarkan daripada bendalir.
2. Tenaga ditambah ke bendalir
Masukan di sini berbentuk tenaga mekanikal. Jadi pemindahan adalah daripada
mekanikal ke hidraulik. Keluaran adalah dalam bentuk satu bendalir yang ber-
gerak, kadang-kadang termampat dan pada suhu yang lebih tinggi. Ringkasnya
mesin-mesin di dalam kategori ini melakukan kerja ke atas bendalir dan tenaga
ditambah ke bendalir.
3. Bendalir digunakan sebagai bahantara pemindahan tenaga
Mesin-mesin ini menggunakan bendalir sebagai bahantara bagi membentuk talian
dalam rantai pertukaran tenaga; tenaga mekanikal ditukarkan kepada tenaga hidra-
ulik di dalam satu bahagian yang kemudiannya ditukarkan balik kepada tenaga
mekanikal di dalam bahagian yang lain. Tidak terdapat sebarang kelebihan me-
kanikal di dalam mesin-mesin ini, tetapi satu pemindahan kuasa yang licin dan
beransur-ansur diperolehi disebabkan sifat-sifat dan jenis aliran bendalir yang ter-
dapat di dalam mesin-mesin jenis ini.
4.1.1.2 Jenis Tindakan Mesin
Di bawah kriteria ini mesin-mesin boleh di kelaskan kepada dua kategori.
1. Sesaran Positif
Prinsip ini memerlukan supaya cecair dimasukkan atau dipaksa ke satu ruang ter-
hingga yang dikepung oleh bahagian-bahagian mekanikal dan kemudiannya ditu-
tup. Bendalir kemudiannya dipaksa atau dikeluarkan dari ruang terhingga tadi
dan kitar diulangi. Jadi fungsi prinsip ini adalah berasaskan perubahan isipadu
cecair di dalam pam.
Di dalam kebanyakan pam sesaran positif aliran cecair didapati terputusputus dan
turunnaik dan kadaralirnya pula dikawal oleh saiz isipadu di dalam pam serta
kekerapan ruang terhingga ini diisi dan dikosongkan. Rajah 4.2 menunjukkan be-
berapa contoh pam sesaran positif.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 78
Rajah 4.2: Beberapa contoh pam sesaran positif.
2. Rotodinamik
Mesin-mesin yang menggunakan prinsip ini dikenali juga sebagai mesin turbo. Di
dalam mesin ini kuasa dipindahkan kepada atau daripada bendalir yang mengalir
oleh tindakan dinamik dan terdapat saluran bebas untuk bendalir pada masukan
dan keluaran mesin tanpa sebarang penutupan berlaku.
Mesin-mesin yang menggunakan prinsip ini mempunyai bahagian berputar di-
panggil pemutar yang berputar berterusan dan bebas di dalam bendalir dan pada
masa yang sama membenarkan bendalir mengalir terus tanpa gangguan. Dalam
waktu yang sama, kuasa dipindahkan kepada atau daripada bendalir yang meng-
alir menerusi laluan-laluan bilah pemutarnya oleh tindakan dinamik.
Dalam analisis yang berikut, perhatian hanya ditumpukan kepada pam roto-
dinamik dari jenis;
(a) pam aliran jejarian,
(b) pam aliran paksi, dan
(c) pam aliran tercampur.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 79
4.2 Analisis Dimensi dan Hukum Keserupaan untuk Mesin
Bendalir Tak Boleh Mampat
Ciri prestasi sebenar mesin rotodinamik ditentukan melalui ujian ujikaji. Mesin yang
berlainan mempunyai ciri yang berlainan sementara mesin dalam kumpulan yang sama,
iaitu rekabentuk yang serupa tetapi dikeluarkan dalam saiz yang berbeza, menghasilkan
satu siri mesin berkeserupaan geometrik yang bekerja pada kelajuan yang berlainan.
Bagi sesuatumesin hidraulik yang saiznya diketahui dan bekerja dengan sejenis bendalir
homogeneous yang berketumpatan malar, pembolehubahpembolehubah yang terlibat
ialah;
D [L] garispusat pemutar
H [L] perbezaan turus antara masukan dan keluaran
≡ tenaga seunit berat bendalir
N [T−1] laju putaran
P [ML2T−3] kuasa terhantar antara bendalir dan pemutar
Q [L3T−1] kadaralir menerusi mesin
g [LT−2] berat seunit jisim
≡ pecutan graviti
ρ [ML−3] ketumpatan bendalir
µ [ML−1T−1] kelikatan bendalir
(Nota: Tinggi purata kekasaran sempadan boleh dianggap termasuk dalam takrif bentukmesin)
Oleh kerana turus H merupakan tenaga seunit berat bendalir, adalah mudah jika gH
dikira sebagai satu pembolehubah juga kerana ia mewakili tenaga seunit jisim, dikenali
juga sebagai tenaga tentu, yang tidak bergantung kepada pecutan graviti. Pam misalnya
menghasilkan tenaga tentu yang sama tanpa dipengaruhi oleh daya graviti.
Jadi lapan pembolehubah di atas boleh dikurangkan kepada tujuh: D, (gH), N, P, Q, ρ,
µ dan oleh kerana terdapat tiga magnitud asas, iaitu jisim (M), panjang (l) dan masa (T),
empat π tanpa dimensi1 boleh diperolehi. Jika D, N dan ρ diambil sebagai pembolehubah
berulang, empat parameter tanpa dimensi tersebut ialah:
π1 =Q
ND3≡ pekali aliran, KQ (4.1)
π2 =gH
N2D2≡ pekali turus, KH (4.2)
π3 =P
ρN3D5≡ pekali kuasa, KP (4.3)
π4 =ρND2
µ≡ nombor Reynolds, Re (4.4)
Dalam julat laju dan saiz biasa aliran di dalam mesin-mesin bendalir adalah turbulen
(iaitu nombor Reynoldnya tinggi); jadi pengaruh kelikatan µ adalah kecil dan untuk ke-
1rujuk Teorem-π Buckingham atau Kaedah Rayleigh

BAB 4. PENGENALANKEPADAMESIN BENDALIR 80
banyakan penggunaan π4 boleh diabaikan. Dengan menganggap kecekapan mekanik
malar, hubungan antara pembolehubah di atas boleh ditulis sebagai;
φ
(Q
ND3,
gH
N2D2,
P
ρN3D5
)
= 0
atau
φ
(
η,gH
N2D2,
P
ρN3D5
)
= 0
4.2.1 Prestasi Mesin Hidraulik
Semasa ujikaji ke atas model mesin rotodinamik, turus H selalunya dikekalkan malar
sementara beban serta laju diubah-ubah.
4.2.1.1 Turbin Hidraulik
Jika turus malar, pada setiap kedudukan bilah pandu (atau injap tombak bagi roda Pel-
ton), lengkung kuasa keluaran, P, kecekapan, η dan kadaralir, Q boleh diplot melawan
laju putaran, N. Walau bagaimanapun adalah lebih baik jika graf prestasi diplot meng-
gunakan parameter tanpa dimensi. Untuk turbin hidraulik, parameter tanpa dimensi
yang sering digunakan diperolehi dari nisbah π; rujuk Bahagian 4.2 di atas;
φ1 =P
ρD2(gH)3/2≡ π4
π1π2
φ2 =Q
D2(gH)1/2≡ π1
π2π4
φ3 =ND
(gH)1/2≡ π2
π1π4
(a) (b)
Rajah 4.3: Lengkung-lengkung prestasi turbin hidraulik, Massey (1983).
Graf yang diplot menggunakan parameter tanpa dimensi begini—rujuk Rajah 4.3—
bukan sahaja mewakili satu mesin tertentu sahaja malah kesemua mesin di dalam siri

BAB 4. PENGENALANKEPADAMESIN BENDALIR 81
homologous yang sama. Biasanya sebutan ρ dan g dikeluarkan daripada parameter tan-
pa dimensi ini kerana kedua- duanya adalah pemalar, begitu juga dengan D khasnya
untuk satu siri homologous tertentu, dan ini memberikan nisbah berikut:
P
H3/2= kuasa unit (unit power)
Q
H1/2= kadaralir unit (unit flow)
N
H1/2= laju unit (unit speed)
Magnitud ketiga-tiga nisbah di atas sepadan dengan kuasa, kadaralir dan laju putaran
jika mesin dijalankan pada kecekapan malar di bawah seunit turus (≡ 1 meter untuk
unit SI).
4.2.1.2 Pam
Pam biasanya dijalankan pada kelajuan malar dan perhatian diberikan kepada perubah-
an H melawan Q, η melawan Q dan P melawan Q, Rajah 4.4. Keputusan ujikaji ke atas
sesebuah pam diselaraskan untuk laju yang berlainan. Bagi pam homologous yang ber-
lainan garispusat, graf keputusan menggunakan parameter tanpa dimensi diplotkan da-
lam bentuk
1. Q/ND3 menggantikan Q,
2. gH/N2D2 menggantikan H, dan
3. P/ρN3D5 menggantikan Pi.
4.2.2 Laju Tentu
Prestasi mesin berkeserupaan geometrik, iaitu mesin-mesin yang tergolong di dalam satu
kumpulan homologous, dikawal oleh hukum keserupaan dan boleh diwakili, untuk kese-
luruhan kumpulan homologous tersebut, oleh graf prestasi yang diplot menggunakan
ciri tanpa dimensi. Bandingan antara kumpulan homologous yang berlainan pula sela-
lunya dibuat menerusi lengkung ciri tanpa dimensi untuk kedua-dua kumpulan yang
dibandingkan di atas satu graf.
Salah satu daripada kriteria yang digunakan untuk maksud ini ialah laju tentu atau di-
kenali juga sebagai nombor jenis. Terdapat beberapa kebaikan dalam menyebut nilai KQ,
KH dan KP pada titik rekabentuk semasa bandingan antara mesin rotodinamik hidraulik
dibuat tetapi kepentingan ketiga-tiga parameter ini berbeza untuk pam dan turbin.
4.2.2.1 Pam
Daripada ketiga-tiga angkali di atas tadi, KQ dan KH merupakan dua parameter penting
untuk pam. Nisbah keduanya menggambarkan kesesuaian pam tertentu bekerja ke atas

BAB 4. PENGENALANKEPADAMESIN BENDALIR 82
Rajah 4.4: Lengkung-lengkung prestasi pam rotodinamik, Massey (1983).
satu magnitud isipadu (kecil atau besar) relatif ke turus yang dihasilkan. Jika nisbah
ini diperolehi dengan menghilangkan garispusat pendesak, bandingan menjadi bebas
daripada saiz mesin (yang diwakili oleh garispusat pendesak). Ini diperolehi dengan
menaikkan KQ ke kuasa 12 dan KH ke kuasa 3
4 ;
laju tentu, Ns =K1/2Q
K3/4H
=
(Q
ND3
)1/2(N2D2
gH
)3/4
(4.5a)
=NQ1/2
(gH)3/4(4.5b)
Nilai Ns biasanya hanya disebut pada titik rekabentuk (iaitu titik kecekapan maksima)
untuk kegunaan pengkelasan, perbandingan, pemilihan dan rekabentuk.
4.2.2.2 Turbin Hidraulik
Perbandingan untuk turbin juga dicapai dengan menggunakan laju tentu tetapi di sini
kuasa yang dihasilkan adalah merupakan parameter penting. Jadi satu ungkapan lain
untuk laju tentu dalam sebutan kuasa yang dihasilkan diperolehi denganmenghilangkan
garispusat pelari D daripada nisbah angkali kuasa KP ke angkali turus KH; iaitu dengan
menaikkan KP ke kuasa 12 dan KH ke kuasa 5
4 . Jadi,
laju tentu, Ns =K1/2P
K5/4H
=
(P
ρN3D5
)1/2(N2D2
gH
)5/4
(4.6a)
=NP1/2
ρ1/2(gH)5/4(4.6b)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 83
Rajah 4.5: Kecekapan melawan laju tentu untuk mesin bendalir, Douglas et al. (1985).
Seperti juga pam, hanya nilai pada titik rekabentuk sahaja digunakan bagi tujuan yang
sama. Perlu diingatkan bahawa kedua-dua ungkapan laju tentu di atas hanya akanmem-
berikan nilai tanpa dimensi jika N dalam pusingan per saat (pps), Q dalam meter padu
sesaat (m3/s), P dalam Watt (W) dan H dalam meter (m).
4.3 Analisis Dimensi Untuk Mesin Rotodinamik Aliran Boleh
Mampat
Penggunaan analisis dimensi ke atas bendalir boleh mampat menjadi bertambah rumit
jika dibandingkan dengan bendalir tak mampat. Walaupun sesuatu bendalir bolehmam-
pat itu boleh dianggap sebagai gas sempurna, sifat-sifat bendalir yang sudah pun dibin-
cangkan dahulu (seperti ρ, ν dsb.) masih tidak mencukupi untuk kita membuat analisis.
Dua ciri lain masih diperlukan; laju bunyi genangan pada masukan mesin, a0, dan nisbah
haba spesifik, γ = cp/cv.
Analisis berikut beranggapan bahawa bendalir mempunyai ciri-ciri gas sempurna atau
wap kering yang menghampiri sifat-sifat gas sempurna.
Apabila berlakunya perubahan ketumpatan yang agak besar, dua pembolehubah lain
yang lebih sesuai digunakan: kadar aliran isipadu, Q, digantikan dengan kadar aliran
jisim, m, dan perubahan turus, H, digantikan dengan perubahan entalpi genangan isen-
tropik, ∆h0s .
Oleh kerana pemindahan haba daripada bekas mesin turbo pada umumnya terlalu kecil
jika dibandingkan dengan fluks tenaga menerusi mesin, parameter suhu boleh dikecu-

BAB 4. PENGENALANKEPADAMESIN BENDALIR 84
Rajah 4.6: Pengaruh laju tentu ke atas bentuk pemutar, Turton (1984).
alikan. Bagaimanapun, suhu merupakan satu ciri yang mudah diperhati dan, untuk gas
sempurna, boleh diperkenalkan di bahagian akhir analisis dengan menggunakan persa-
maan keadaan untuk gas sempurna,
p
ρ= RT
R =Ro
m= cp − cv
dengan,
m ≡ berat molekular2
Ro ≡ Pemalar Gas Universal3
= 8.314kJ/(kg mol K)
Jadi parameter-parameter prestasi mesin turbo yangmenggunakan bendalir boleh mam-
pat; ∆h0, η dan P, boleh diungkapkan menerusi hubungan fungsian berikut:
∆h0, η, P = f (µ,N,D, m, ρ01, a01,γ) (4.7)
atau,
∆h0 = f (µ,N,D, m, ρ01, a01,γ)
η = f (µ,N,D, m, ρ01, a01,γ)
P = f (µ,N,D, m, ρ01, a01,γ)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 85
Setiap hubungan fungsian di atas terdiri daripada 8 pembolehubah. Dengan memilih
ρ01, N dan D sebagai pembolehubah berulang, ketiga-tiga hubungan fungsian di atas boleh
dikurangkan kepada 5 kumpulan tanpa dimensi;
∆h0sN2D2
,P
ρ01N3D5, η = f
(m
ρ01ND3,
ρ01ND2
µ,ND
a01,γ
)
(4.8)
atau
∆h0sN2D2
= f
(m
ρ01ND3,
ρ01ND2
µ,ND
a01,γ
)
P
ρ01N3D5= f
(m
ρ01ND3,
ρ01ND2
µ,ND
a01,γ
)
η = f
(m
ρ01ND3,
ρ01ND2
µ,ND
a01,γ
)
Pekali aliran,
φ =m
ρ01ND3
boleh juga dituliskan sebagai,
φ =m
ρ01a01D2
Oleh kerana ND berkadaran dengan laju bilah, kumpulan (ND/a01) dikenali sebagai
nombor Mach bilah.
4.3.1 Kesan mampatan ke atas analisis dimensi
Pertimbangkan sebuah pemampat adiabatik yang menggunakan gas sempurna. Pertam-
bahan entalpi genangan isentropik untuk gas sempurna boleh dituliskan sebagai cp(T02s −T01). Proses mampatan ini ditunjukkan di dalam Rajah 4.7; titik keadaan genangan ber-
ubah pada entropi yang malar antara tekanan-tekanan genangan p01 dan p02.
Menerusi hubungan isentropik yang adibatik,
p
ργ= pemalar
dan persamaan keadaan
p
ρ= RT
ungkapan berikut diperolehi,
T02sT01
=
(p02p01
)(γ−1)/γ

BAB 4. PENGENALANKEPADAMESIN BENDALIR 86
Rajah 4.7: Perubahan adiabatik unggul di dalam keadaan-keadaan genangan merentasi
mesinturbo, Dixon (1978).
Oleh itu,
∆h0s = cpT01
[(p02p01
)(γ−1)/γ
− 1
]
Oleh kerana cp = γR/(γ − 1) dan a201 = γRT01, jadi
∆h0sa201
= f
(p02p01
)
Pekali aliran sekarang lebih mudah jika diungkapkan sebagai
φ =mD2
ρ01a01=
mRT01p01
√γRT01D2
=m√RT01
D2p01√
γ
Oleh kerana
m ≡ ρ01D2(ND)
pekali kuasa boleh ditulis sebagai
ψ =P
ρ01N3D5=
mcp∆T0
[ρ01D2(ND)](ND)2=
cp∆T0
(ND)2=
∆T0T01
Kumpulkan kumpulan tanpa dimensi yang baru diperolehi ini dan gantikan ke dalam
persamaan (4.7), untuk memberikan
p02p01
= f
[m√RT01
D2p01,
ND√RT01
, Re,γ
]
(4.9a)
η = f
[m√RT01
D2p01,
ND√RT01
, Re,γ
]
(4.9b)
∆T0T01
= f
[m√RT01
D2p01,
ND√RT01
, Re,γ
]
(4.9c)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 87
Alasan untukmenggugurkan γ daripada beberapa kumpulan tanpa dimensi di atas ialah
γ sudah pun dianggap sebagai satu pembolehubah bebas, dan untuk sesuatu mesin yang
saiznya ditetapkan dan hanya mengendalikan sejenis gas, biasanya γ, R dan D dikelu-
arkan daripada persamaan (4.9). Di samping itu, jika mesin ini bekerja pada Re yang
tinggi (atau dalam julat laju yang kecil), Re boleh juga digugurkan. Di dalam keadaan-
keadaan ini persamaan (4.9) menjadi
p02p01
, η,∆T0T01
= f
[m√T01
p01,
N√T01
,
]
(4.10)
Perhatian: Dengan mengeluarkan D dan R, pembolehubah-pembolehubah bebas di da-
lam persamaan (4.10) sekarang ini mempunyai dimensi.
4.4 Pam Rotodinamik
4.4.1 Pengkelasan
Terdapat beberapa jenis pam rotodinamik, Rajah 4.8, yang boleh dikelaskan kepada tiga
kategori utama mengikut arah bendalir semasa meninggalkan pendesak;
Pam Aliran Jejari Kategori ini paling banyak digunakan. Mempunyai kecekapan yang
baik pada julat laju tentu yang rendah. Pendesak dibina dengan bilah yang dileng-
kungkan ke belakang, hadapan atau lurus (iaitu bilah jejari).
Pam Aliran Paksi Disebut juga sebagai pam kipas. Penggunaannya banyak tertumpu
kepada turus rendah dan kadaralir tinggi.
Pam Aliran Tercampur Arah aliran mempunyai dua komponen – arah jejari dan paksi.
Tidak banyak digunakan, mungkin kerana saiznya yang lebih besar untuk meng-
hasilkan nilai turus dan kadaraliran yang sama dengan pam aliran jejari.
(a) (b) (c)
Rajah 4.8: Pam rotodinamik—(a) pam aliran jejari, (b) pam aliran tercampur dan (c) pam
aliran paksi, Turton (1984).

BAB 4. PENGENALANKEPADAMESIN BENDALIR 88
4.4.2 Turus Pam
4.4.2.1 Turus Statik
Turus statik ialah jarak tegak di antara aras bendalir di dalam takungan (bawah) dan
tangki (atas). Daripada Rajah 4.9,
Hs = Turus statik pam
zs = Tinggi garis tengah pam di atas permukaan takungan
zd = Tinggi tangki di atas garis tengah pam
dan
Hs = zs + zd (4.11)
Perbezaan di antara aras bendalir di dalam takungan bawah dan aras tangki atau taku-
ngan yang lebih tinggi ini juga disebut daya angkat statik, Hs, sementara zs dinamai turus
statik sedutan dan zd pula dikenali sebagai turus statik penghantaran.
4.4.2.2 Turus Sebenar atau Turus Keseluruhan
Turus sebenar adalah turus keseluruhan yang perlu dihasilkan oleh pam untuk meng-
hantar bendalir daripada takungan ke tangki. Di samping menghasilkan turus statik, se-
sebuah pam perlu juga mengatasi kehilangan-kehilangan di dalam paip dan pemasang-
an, serta kehilangan tenaga kinetik di keluaran paip penghantaran.
Jika
H = Turus sebenar atau keseluruhan pam
hls = Kehilangan-kehilangan di dalam paip sedutan
hld = Kehilangan-kehilangan di dalam paip penghantaran
hl = Jumlah kehilangan di dalam kedua-dua paip
= hls + hld
vd = Halaju bendalir di dalam paip penghantaran
maka
H = zs + zd + hls + hld +v2d2g
= Hs + hl +v2d2g
(4.12)
Kehilangan-kehilangan di dalam bekas dan pemutar pam tidak diambilkira di dalam
turus keseluruhan ini.
Turus keseluruhan ini juga, kadangkala, dikenali dengan berbagai nama yang agak me-
ngelirukan pengguna seperti turus sebenar, turus kasar atau turus berkesan.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 89
4.4.2.3 Turus Manometrik
Biasanya kita tidak mungkin dapat mengukur dengan tepat kehilangan-kehilangan di
dalam bekas dan pemutar pam. Oleh yang demikian, turus manometrik diperkenalkan
bagi mewakili tokokan tenaga tekanan bendalir di dalam pemutar pam.
Jika dua tolok tekanan dipasang sedekat mungkin dengan pam di bahagian sedutan dan
penghantarannya, perbezaan bacaan kedua-dua tolok akan memberikan perubahan tena-
ga tekanan di dalam pam, atau lebih dikenali sebagai turus manometrik.
Jika
Hm = Turus manometrik pam
hps = Bacaan tolok tekanan di sedutan pam
=psρg
hpd = Bacaan tolok tekanan di penghantaran pam
=pdρg
vs = Halaju bendalir di dalam paip sedutan
maka
Hm = hpd − hps

BAB 4. PENGENALANKEPADAMESIN BENDALIR 90
h lsv s
2/2g
zd
z s
H sH mH
vd2/2g
h ld
Pai
p pe
ngha
ntar
anP
aip
sedu
tan
Tangki
Takungan
P a m
Injap penghantaran
Injap sedutan
A
B
C
Rajah 4.9: Turus-turus pam.
Seterusnya kita gunakan persamaan Bernoulli ke titik A di permukaan takungan (yang
bendalirnya tenang) dan titik B pada bahagian sedutan pam—rujuk Rajah 4.9. Dengan
BAB 4. PENGENALANKEPADAMESIN BENDALIR 91
menganggap titik B berada di aras garis tengah pam dan mengambil aras di dalam ta-
kungan sebagai datum,
paρg
+ 0+ 0 =psρg
+v2s2g
+ zs + hls
atau
paρg
= hps +v2s2g
+ zs + hls (4.13)
Langkah yang serupa dilakukan pada titik B dan titik C. Perbezaan tinggi di antara garis
tengah pam dan tolok tekanan yang dipasang di bahagian penghantaran pam diabaikan
jadi hpd mewakili bacaan tekanan di keluaran pam. Denganmengambil garis tengah pam
sebagai datum
pdρg
+v2d2g
+ 0 =paρg
+v2d2g
+ zd + hld
atau
hpd +v2d2g
=paρg
+v2d2g
+ zd + hld (4.14)
Tolakkan persamaan (4.13) daripada persamaan (4.14),(
hpd +v2d2g
)
−(
hps +v2s2g
+ zs + hls
)
=
(
paρg
+v2d2g
+ zd + hld
)
−(paρg
)
dan
hpd − hps =v2s2g
+ (zs + zd) + (hls + hld)
atau
Hm = Hs + hl +v2s2g
(4.15)
Dengan itu turus keseluruhan dan turus manometrik berbeza hanya dalam turus halaju
masing-masing. Dalam turus keseluruhan, turus halaju paip penghantaran dipertim-
bangkan sementara dalam turus manometrik pula, turus halaju paip sedutan yang di-
ambilkira. Apabila kedua-dua paip (sedutan dan penghantaran) mempunyai garispusat
yang sama, turus keseluruhan dan turus manometrik menjadi sama.
Tolakkan persamaan (4.12) daripada persamaan (4.15),
Hm − H =v2s2g
− v2d2g
Hm = H +
(
v2s2g
− v2d2g
)
(4.16)
= H : apabila vs = vd (4.17)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 92
Perlu dibezakan di sini bahawa H ialah jumlah pertambahan tenaga di dalam bendalir
oleh pam, sementara Hm adalah tokokan tenaga tekanan sahaja. Walau bagaimana pun,
oleh kerana perbezaan di antara Hm dan H terlalu kecil, kedua-duanya dikira serupa.
4.4.3 Pam Aliran Jejari
Pam aliran jejari dikenali juga sebagai pam empar. Aliran di dalam pam jenis ini ber-
gerak daripada pusat pemutar mengarah keluar. Pemutar pam, lebih dikenali sebagai
pendesak, berputar di dalam bekas pilin4. Paip sedutan ke masukan adalah dalam arah
paksi dan bendalir memasukimata pendesak5 dengan sedikit, jika ada, komponen pusar-
an halaju mutlak bendalir, Rajah 4.10. Daripada sini bendalir mengalir keluar dalam arah
bilah dan setelah menerima tenaga daripada pendesak, bendalir keluar dengan tekanan
dan halajunya bertambah.
Bilah-bilah pendesak selalunya dilengkungkan ke belakang untuk mendapatkan kece-
kapan yang baik. Bilah-bilah jejari juga banyak digunakan kerana kos pembinaannya
yang lebih murah. Kegunaan bekas ialah untuk menukar sebanyak mungkin turus hala-
ju pada keluaran kepada turus tekanan sebelum aliran masuk ke paip hantaran. Terdapat
dua jenis keluaran pam aliran jejari, Rajah 4.10:
1. ruang tanpa bilah dengan volut,
2. ruang tanpa bilah dengan keluaran terlata6,
(a) (b)
Rajah 4.10: Keluaran pam aliran jejari—(a) ruang tanpa bilah dengan volut dan (b) ruang
tanpa bilah dengan keluaran terlata, Massey (1983).
4.4.3.1 Teori Aliran Dua Dimensi
Aliran sebenar di dalam pemutar pam empar adalah di dalam tiga dimensi dan vektor-
vektor halaju pada masukan, v1, dan keluaran pemutar, v2, boleh dileraikan kepada tiga
4spiral casing5pusat pendesak6keluaran terlata selalunya lebih cekap tetapi kos pembinaannya agak mahal

BAB 4. PENGENALANKEPADAMESIN BENDALIR 93
komponen—jejari (vr1 dan vr1), paksi (vx1 dan vx1) dan tangen (vt1 dan vt1).
Bagi memudahkan analisis, aliran tiga dimensi ini boleh dikurangkanmenjadi aliran dua
dimensi dengan menganggap:
1. aliran di dalam pam adalah mantap,
2. halaju-halaju pada masukan dan keluaran adalah seragam dalam magnitud dan
sudut yang dibuat dengan arah rujukan
3. bilah-bilah pendesak hanya bergerak dalam arah lilitan, jadi hanya komponen daya
dalam arah ini yang melakukan kerja7.
Untuk merekabentuk dan menganalisa proses pertukaran tenaga di dalam pendesak, ki-
ta perlu membina segitiga halaju pada masukan dan keluaran pendesak. Setiap vektor
halaju boleh dileraikan kepada tiga komponen yang saling tertegak. Satu komponen di-
arahkan selari dengan paksi putaran memberikan komponen paksi, satu mengikut arah
jejari menerusi paksi putaran, dan komponen yang terakhir bersudut tepat ke arah jejari,
iaitu arah tangen, memberikan komponen tangen, Rajah 4.11.
Rajah 4.11: Vektor halaju dalam tiga dimensi.
Perubahan magnitud komponen paksi menghasilkan daya paksi yang bertindak ke atas
galas tujah. Sementara perubahan magnitud komponen jejari pula menghasilkan beban
jurnal. Kedua-dua perubahan ini tidak memberi sebarang kesan ke atas gerakan sudut
pendesak kecuali geseran galas.
7Anggapan ini menghadkan perhatian kepada perubahan momentum dalam arah lilitan. Walaupun ter-
dapat juga perubahan momentum dalam arah lain tetapi daya-daya sepadannya tidak mempunyai momen
sekitar paksi putaran pendesak

BAB 4. PENGENALANKEPADAMESIN BENDALIR 94
Perubahan magnitud komponen tangen dan jejari sebaliknya adalah sepadan dengan
perubahan momentum sudut atau momen momentum bendalir dan, menerusi hukum
gerakan Newton, adalah sama dengan jumlahan daya-daya yang dikenakan ke atas pen-
desak, iaitu dayakilas bersih, T. Jadi,
Dayakilas sekitar sesuatu paksi
= Kadar pertambahan momentum sudut sekitar paksi tersebut
Jika satu jisim bendalir m1 memasuki pendesak pada jejari r1 dengan komponen halaju
tangen vt1 dalam jeda masa t dan satu jisim m2 meninggalkan pendesak pada jejari r2dengan komponen halaju tangen vt2 dalam jeda masa t yang sama, dayakilas T yang
dikenakan ke atas bendalir ialah
T =m2
tr2vt2 −
m1
tr1vt1 (4.18a)
= m2r2vt2 − m1r1vt1 (4.18b)
Oleh kerana keterusan wujud,
m1 = m2 = m = ρQ (4.19)
jadi,
T = ρQr2vt2 − ρQr1vt1 (4.20a)
= ρQ (r2vt2 − r1vt1) (4.20b)
Seterusnya,
Kuasa yang diperlukan oleh pendesak
= Kerja terlaku ke atas bendalir seunit masa
iaitu,
TΩ = ρQ (r2vt2 − r1vt1) Ω (4.21)
dan oleh kerana Ωr = U,
Kerja terlaku ke atas bendalir seunit jisim
=Kerja terlaku ke atas bendalir
Kadaralir jisim= U2vt2 −U1vt1
(4.22)
Untuk analisis 2-dimensi, halaju mutlak bendalir, v, boleh dileraikan kepada komponen
jejari vr atau v f dan komponen tangen vt, Rajah 4.12.
Melalui kaedah geometri,
v2f2 = v22 − v2t2

BAB 4. PENGENALANKEPADAMESIN BENDALIR 95
β2α2
β1 α1
v1W 1
U 1
v f1
W 2
v f2v2
U 2
Masukan
Keluaran
Ω Bilahpendesak
β1
W 1
U 1
v1 = v f1
α1= 90ο
v t1 = 0
Masukan tanpa pusaran
v t1
v t2
Rajah 4.12: Segitiga halaju pam aliran jejari pada masukan dan keluaran.
dan
v2f2 = W22 − (U2 − vt2)
2
Kaitkan kedua-dua ungkapan di atas dan kembangkan
v22 − v2t2 = W22 −U2
2 + 2U2vt2 − v2t2
dan
U2vt2 = 12
(v22 + U2
2 −W22
)(4.23a)
Dengan kaedah yang sama pada masukan kita memperolehi
U1vt1 = 12
(v21 + U2
1 −W21
)(4.23b)
Masukkan persamaan-persamaan (4.23a) dan (4.23b) ke dalam persamaan (4.22),
Kerja terlaku ke atas bendalir seunit jisim
= 12
[(v22 − v21
)+(U2
2 −U21
)−(W2
2 −W21
)] (4.24)
Pam aliran jejari jarang dibekalkan dengan bilah pandu masukan dan bendalir meng-
hampiri mata pendesak tanpa pusaran. Sudut masukan bilah-bilah pendesak direka-
bentuk supaya memberikan segitiga halaju yang bersudut tepat supaya vt1 = 0 dan
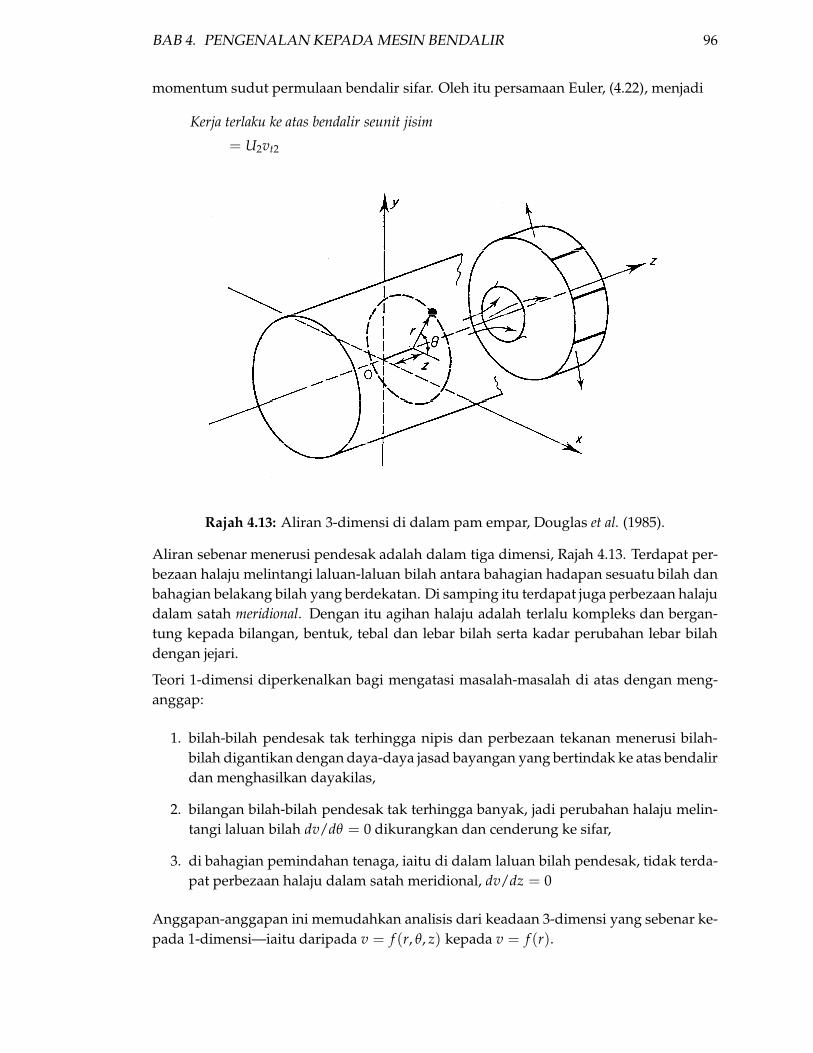
BAB 4. PENGENALANKEPADAMESIN BENDALIR 96
momentum sudut permulaan bendalir sifar. Oleh itu persamaan Euler, (4.22), menjadi
Kerja terlaku ke atas bendalir seunit jisim
= U2vt2
Rajah 4.13: Aliran 3-dimensi di dalam pam empar, Douglas et al. (1985).
Aliran sebenar menerusi pendesak adalah dalam tiga dimensi, Rajah 4.13. Terdapat per-
bezaan halaju melintangi laluan-laluan bilah antara bahagian hadapan sesuatu bilah dan
bahagian belakang bilah yang berdekatan. Di samping itu terdapat juga perbezaan halaju
dalam satah meridional. Dengan itu agihan halaju adalah terlalu kompleks dan bergan-
tung kepada bilangan, bentuk, tebal dan lebar bilah serta kadar perubahan lebar bilah
dengan jejari.
Teori 1-dimensi diperkenalkan bagi mengatasi masalah-masalah di atas dengan meng-
anggap:
1. bilah-bilah pendesak tak terhingga nipis dan perbezaan tekanan menerusi bilah-
bilah digantikan dengan daya-daya jasad bayangan yang bertindak ke atas bendalir
dan menghasilkan dayakilas,
2. bilangan bilah-bilah pendesak tak terhingga banyak, jadi perubahan halaju melin-
tangi laluan bilah dv/dθ = 0 dikurangkan dan cenderung ke sifar,
3. di bahagian pemindahan tenaga, iaitu di dalam laluan bilah pendesak, tidak terda-
pat perbezaan halaju dalam satah meridional, dv/dz = 0
Anggapan-anggapan ini memudahkan analisis dari keadaan 3-dimensi yang sebenar ke-
pada 1-dimensi—iaitu daripada v = f (r, θ, z) kepada v = f (r).
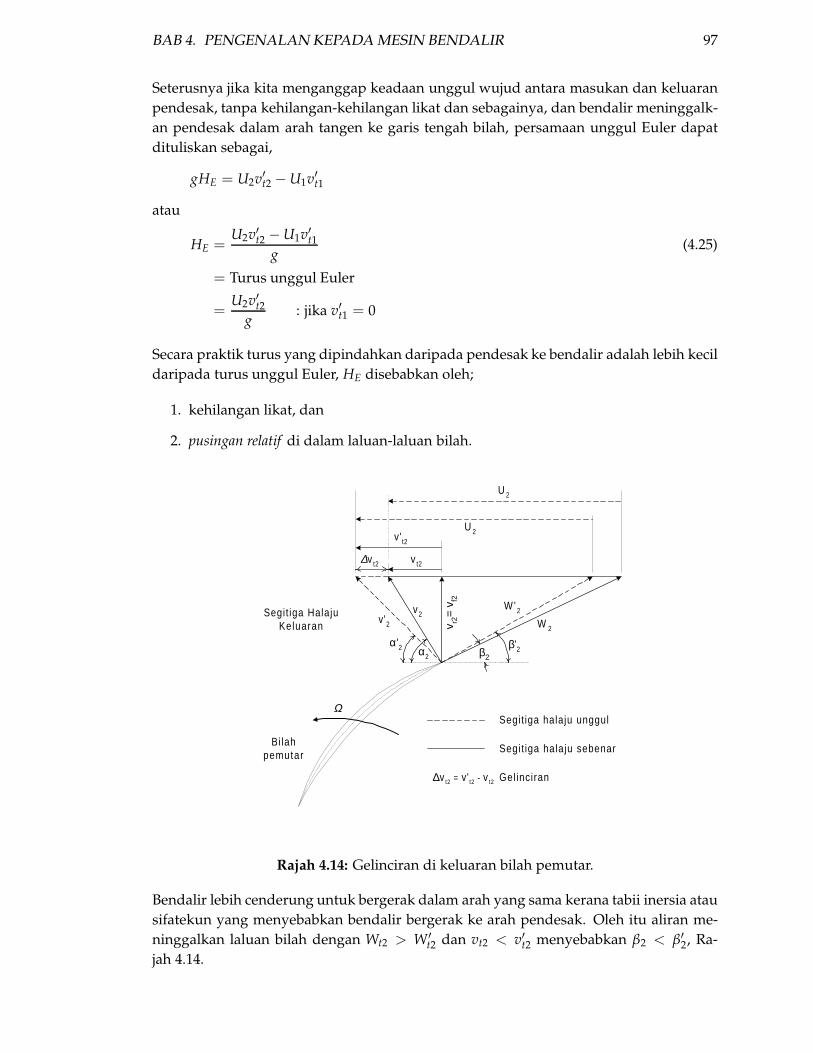
BAB 4. PENGENALANKEPADAMESIN BENDALIR 97
Seterusnya jika kita menganggap keadaan unggul wujud antara masukan dan keluaran
pendesak, tanpa kehilangan-kehilangan likat dan sebagainya, dan bendalir meninggalk-
an pendesak dalam arah tangen ke garis tengah bilah, persamaan unggul Euler dapat
dituliskan sebagai,
gHE = U2v′t2 −U1v
′t1
atau
HE =U2v
′t2 −U1v
′t1
g(4.25)
= Turus unggul Euler
=U2v
′t2
g: jika v′t1 = 0
Secara praktik turus yang dipindahkan daripada pendesak ke bendalir adalah lebih kecil
daripada turus unggul Euler, HE disebabkan oleh;
1. kehilangan likat, dan
2. pusingan relatif di dalam laluan-laluan bilah.
β2α2
W' 2
v r2=
vf2
v'2Segit iga Halaju
Keluaran
Ω
Bilahpemutar
v t2
W 2
β'2
v2
α'2
v' t2U 2
∆v t2
Segit iga halaju unggul
Segit iga halaju sebenar
Gelinciran∆v t2 = v' t2 - v t2
U 2
Rajah 4.14: Gelinciran di keluaran bilah pemutar.
Bendalir lebih cenderung untuk bergerak dalam arah yang sama kerana tabii inersia atau
sifatekun yang menyebabkan bendalir bergerak ke arah pendesak. Oleh itu aliran me-
ninggalkan laluan bilah dengan Wt2 > W ′t2 dan vt2 < v′t2 menyebabkan β2 < β′
2, Ra-
jah 4.14.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 98
Agihan tekanan yang lebih tinggi di atas permukaan hadapan bilah dari di bahagian
belakangnya—Rajah 4.15—menghasilkan agihan halaju yang tidak seragam di dalam la-
luan bilah dan seterusnya menjadikan β2 < β′2. Oleh kerana vt2 < v′t2, kerja terlaku ke
atas bendalir seunit jisim dikurangkan oleh proses pusingan relatif ini. Jadi turus yang
dapat dipindahkan daripada pendesak ke bendalir, setelah mengambilkira faktor kehi-
langan likat dan pusingan relatif di dalam laluan bilah, ialah
Hi =U2vt2 −U1vt1
g(4.26)
=U2vt2g
: jika vt1 = 0
Rajah 4.15: Pusingan relatif di dalam laluan bilah, Douglas et al. (1985).
Perlu ditekankan di sini bahawa penerbitan persamaan-persamaan (4.25) dan (4.26)
adalah berdasarkan kepada pendekatan teori yang bergantung kepada segitiga halaju
semata-mata.
Ringkasnya, boleh dinyatakan di sini bahawa pusingan relatif merupakan faktor utama
yang mengurangkan jumlah turus yang dapat dipindahkan ke bendalir pada keadaan
unggul8, HE, kepada Hi. Jika Hi diambil sebagai satu pecahan, katalah kc, daripada turus
HE kita akan memperolehi
Hi = kcHE (4.27)
dengan
kc =Hi
HE= faktor pusingan relatif
= pekali bilah, µ
Nilai faktor pusingan relatif, kc, atau pekali bilah, µ, ini bergantung kepada bilang-
an bilah, sudut bilah di keluaran dan nisbah jejari masukan ke jejari keluaran pende-
sak. Ia tidak bersandar kepada keadaan-keadaan operasi dan biasanya dikira menerusi
8iaitu tanpa kehilangan likat dan pusingan relatif

BAB 4. PENGENALANKEPADAMESIN BENDALIR 99
hubungan-hubungan empirik, sebagai contoh
µ =1
1+2r22φ
z(r22 − r21)
dengan
φ = 0.60 + 0.6 sin β′2
Jadual 4.1 menunjukkan perubahan pekali bilah, µ, dengan bilangan bilah, z, bagi pam
aliran jejari.
Jadual 4.1: Perubahan pekali bilah, µ, dengan bilangan bi-
lah, z, bagi pam aliran jejari
Bilangan bilah, z 4 6 8 10 14 18 24
Pekali bilah, µ 0.62 0.71 0.77 0.81 0.85 0.88 0.91
4.4.3.2 Ukuran Prestasi
1. Turus Bersih dan Kecekapan Hidraulik
Kehilangan hidraulik adalah kehilangan-kehilangan yang berlaku di antara baha-
gian sedutan dan bahagian penghantaran pam. Ini termasuklah:
• kehilangan kejut di masukan bilah-bilah pendesak dan bekas pilin,
• kehilangan-kehilangan geseran dan ‘eddy’ di dalam laluan-laluan bilah dan
bekas, dan
• kehilangan-kehilangan disebabkan perubahan mendadak dalam luas dan
arah aliran.
Kecekapan hidraulik, ηh, mengambilkira semua kehilangan di atas. Ia ditakrifkan
sebagai nisbah turus sebenar yang terhasil ke turus masukan pendesak, iaitu,
ηh =H
Hi=
gH
U2vt2 −U1vt1(4.28)
dengan,
H ≡ turus sebenar yang terhasil
Hi ≡ turus masukan pendesak
2. Kadaralir dan Kecekapan Isipadu

BAB 4. PENGENALANKEPADAMESIN BENDALIR 100
Rajah 4.16: Bocoran di dalam pam empar, Massey (1983).
Tekanan pada keluaran pendesak lebih tinggi daripada tekanan di masukan. Oleh
yang demikian bendalir lebih cenderung untuk berpatah balik, atau bocor, meneru-
si ketelusan di antara pendesak dan bekas, Rajah 4.16. Selain daripada itu kebocor-
an mungkian berlaku pada kedap. Kedua-dua ini dikelaskan sebagai kehilangan
isipadu.
Kecekapan isipadu, ηv, ialah nisbah luahan sebenar ke jumlah kadar aliran yang
memasuki pam;
ηv =Q
Q + ∆Q=
Q
Qi(4.29)
dengan,
Q ≡ luahan sebenar
Qi ≡ kadar aliran yang memsuki pam
∆Q ≡ Bocoran
Biasanya bendalir memasuki pendesak tanpa pusaran, vt1 = 0. Jadi pada masukan
ke pendesak, kadar aliran isipadu ialah
Q1 = (2πr1b1 − b1zt) v f1
= (2πr1b1 − b1zt) v1 : jika vt1 = 0
= Qi
Pada keluran pendesak pula,
Q2 = (2πr2b2 − b2zt) v f2
= Qi

BAB 4. PENGENALANKEPADAMESIN BENDALIR 101
Bagi rumus-rumus kadar aliran di atas,
b1 ≡ lebar bilah pada masukan
b2 ≡ lebar bilah pada keluaran
d2 ≡ diameter luar pendesak
t ≡ tebal bilah
v f1 ≡ halaju aliran pada masukan
= vr1
v f2 ≡ halaju aliran pada keluaran
= vr2
z ≡ bilangan bilah pendesak
Rajah 4.17: Keratan rentas pemasangan pam empar, Turton (1984).
3. Kesan Geseran dan Kecekapan Mekanikal
Kehilangan-kehilangan tenagamekanikal adalah disebabkan oleh geseran pada pi-
ring, galas dan sesendal kedap, Rajah 4.17. Kehilangan kuasa oleh geseran piring
diberikan sebagai;
Pd =Ω2µ
t
∫ rT
rR
r2πrdrr
=Ω2µπ
32
d2T − d2Rt
dengan,
Ω ≡ halaju putaran (rad/s)
µ ≡ kelikatan bendalir
t ≡ tebal piring
r ≡ jejari piring
d ≡ diameter piring
T ≡ hujung piring
R ≡ pangkal piring

BAB 4. PENGENALANKEPADAMESIN BENDALIR 102
Sementara kuasa yang hilang disebabkan geseran pada galas dan sesendal kedap
pula diberikan sebagai;
Pb = Ω × pemalar : anggap geseran kering
Jadi jumlah kehilangan-kehilangan mekanikal ialah
Pm = Pd + Pb
Kecekapan mekanikal pam ditakrifkan sebagai nisbah;
ηm =Kerja terlaku oleh pendesak seunit berat bendalir
Kuasa yang dibekalkan kepada aci
=Kuasa yang dibekalkan ke aci− Kehilangan mekanikal
Kuasa yang dibekalkan ke aci
=Ps − Pm
Ps
=PiPs
=ρgQiHi
ρgQiHi + Pm(4.30)
dengan
Pi ≡ kuasa terpindah daripada aci ke pendesak
4. Kecekapan Keseluruhan Pam
Kecekapan keseluruhan, η, boleh ditakrifkan sebagai nisbah
η =Kuasa di dalam bendalir yang keluar daripada pam
Kuasa yang dibekalkan kepada aci
=ρgQH
Ps(4.31a)
=H
Hi× Q
Qi× ρgQiHi
Ps(4.31b)
= ηhηvηm (4.31c)
4.4.3.3 Perubahan Turus pada Pendesak dengan Bentuk Bilah
Daripada hukum keterusan kita juga boleh menulis,
Qi = A′2v f2
= (A2 − b2zt) v f2
= kaA2v f2

BAB 4. PENGENALANKEPADAMESIN BENDALIR 103
dengan
A2 ≡ luas susurkeliling pendesak
= 2πr2b2
A′2 ≡ luas bersih di keluaran pendesak
ka ≡ faktor pengurangan bilah
= 1− b2zt
A2
b2zt ≡ ruang ketebalan bilah
Oleh itu,
v f2 =Qi
kaA2(4.32)
=Q
ηvkaA2: untuk Qi =
Q
ηv
=Q
ηvA2: jika ka = 1
Jika kadar aliran Qi berubah, v f2 juga turut berubah kerana hubungan di antara kedua-
duanya menerusi hukum keterusan. Di samping itu vt2 akan turut berubah untuk β2 dan
Ω yang tetap. Daripada segitiga halaju
vt2 = U2 − v f2 cot β2 : biasanya β2 < β′2 (4.33)
Turus atau tenaga seunit berat bendalir pada pendesak ialah
Hi =U2vt2 −U1vt1
g
dan jika dianggap tiada ada pusaran pada masukan, iaitu vt1 = 0, maka
Hi =U2vt2g
Gantikan untuk vt2 menggunakan persamaan (4.33)
Hi =U2
g
(U2 − v f2 cot β2
)
=U2
2
g− U2
g
Qi
kaA2cot β2 (4.34)
Untuk sesebuah pam aliran jejari yang bekerja pada U2 yang malar, hubungan di antara
Hi dan Qi berbentuk satu garisan lurus—Rajah 4.18—dengan syarat β2 dan ηv malar.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 104
β'2 > 90o
(bi lah melengkung ke hadapan)
β'2 = 90o
(bilah jejari)
β'2 < 90o
(bi lah melengkung ke belakang)
Kadar aliran, Q i
Turus, H i
Rajah 4.18: Kesan bentuk bilah ke atas turus.
4.4.4 Pam Aliran Paksi
Bahagian-bahagian asas sesuatu peringkat di dalam mesinturbo aliran paksi biasanya
terdiri daripada barisan bilah pemutar yang diikuti oleh barisan bilah stator. Selalunya
pam-pam aliran paksi tidak dipasang dengan bilah-bilah pandu, Rajah 4.19, kecuali di
dalam beberapa rekabentuk yang khusus. Sementara di dalam pemampat pula, bilah
pemutar biasanya didahului oleh bilah-bilah pandu masukan; bilah-bilah pandu ini di-
gunakan supaya bendalir pada masukan ke bilah pemutar mempunyai komponen pu-
saran atau tangen, vt1, di samping komponen paksi, vx1.
Rajah 4.19: Pendesak pam aliran paksi, Douglas et al. (1985).
Proses pemindahan tenaga berlaku di dalam pemutar. Tekanan mula bertambah pada

BAB 4. PENGENALANKEPADAMESIN BENDALIR 105
masukan ke bilah-bilah pemutar dan bendalir keluar dengan tekanan yang lebih tinggi
pada bahagian keluaran pemutar. Halaju mutlak bendalir pada keluaran pemutar, v2lebih besar daripada nilai v1 di bahagian masukannya dan di sini bilah stator memainkan
peranannya; berfungsi sebagai alat untuk menukar sebahagian daripada tenaga kinetik
atau turus halaju pada keluaran pemutar kepada turus tekanan.
4.4.4.1 Teori
Berbeza dari mesin-mesin aliran radius, contohnya pam empar, aliran di dalam mesin-
mesin aliran paksi adalah di dalam arah paksi dan perubahan daripada masukan ke
keluaran pemutarnya berlaku pada radius yang sama, Rajah 4.20. Jadi
U1 = U2 = U
= Ωr (4.35)
α2
Keluaran
Ω
Bilahpendesak
W 2
U 2
v2
v f2 = vx2
β1
β2
v1
W 1
U 1
α1
Masukan tanpapusaran
Masukan denganpusaran
U 1W 1
v1
β1
v f1 = vx1
Rajah 4.20: Segitiga halaju pam aliran paksi.
Oleh kerana luas aliran sama pada masukan dan keluaran, halaju aliran v f (dalam arah

BAB 4. PENGENALANKEPADAMESIN BENDALIR 106
paksi), boleh diperolehi dari hukum keterusan,
v f1 = v f2 = v f
= Komponen paksi halaju mutlak bendalir
= vx
dan kadaralir jisim,
m = ρπ(r2T − r2R
)v f = ρπ
(r2T − r2R
)vx (4.36)
dengan,
rT ≡ radius hujung
rR ≡ radius pangkal atau hab
rm ≡ radius min
=rT + rR
2
Daripada segitiga halaju keluaran,
tan β′2 =
U − v′t2v f
(4.37)
dan dengan itu,
v′t2 = U − v f2 tan β′2 (4.38)
Gantikan ungkapan untuk v′t2 ini ke dalam persamaan Euler dan anggap bendalir masuk
ke pemutar dalam arah paksi tanpa komponen pusaran, v′t1 = 0,
gHE = Uv′t2= U
(U − v f tan β′
2
)(4.39)
Persamaan ini boleh digunakan pada sebarang nilai radius bilah r dan tidak semestinya
malar dalam julat dari rR ke rT . Untuk menggunakan keadaan ini, pertambahan nilai U
dengan radius mestilah ditimbalbalik dengan pengurangan sebutan v f tan β yang sama
nilainya. Oleh kerana v f malar, bilah-bilah terpaksa dikilas, Rajah 4.21, supaya untuk
radius ra dan rb misalnya,
U2a −Uav f tan β′
2a = pemalar
= U2a −Uav f tan β′
2b
Susunsemula,
v f
(Ub tan β′
2b −Ua tan β′2a
)= U2
b −U2a

BAB 4. PENGENALANKEPADAMESIN BENDALIR 107
Rajah 4.21: Kilasan bilah pendesak pam aliran paksi, Turton (1984).
Tetapi U = Ωr, jadi
v f
(Ωrb tan β′
2b − Ωra tan β′2a
)= Ω
(r2b − r2a
)
memberikan
rb tan β′2b − ra tan β′
2a =Ω
v f
(r2b − r2a
)(4.40)
Walaubagaimana pun, keadaan ini yang dikenali sebagai rekabentuk vorteks bebas sukar
diperolehi.
4.4.4.2 Gerakan Vorteks dan Hubungannya dengan RekabentukMesin-mesin Aliran
Paksi
1. Aliran Vorteks Bebas
Aliran ini berkeadaan
vtr = pemalar, C (4.41)
Untuk satu peringkat,
vt1r = v1 ⇒ vt1 =v1r
vt2r = v2 ⇒ vt2 =v2r
Dari persamaan Euler,
gHi = U (vt2 − vt1)
= Ωr(v2r
+v1r
)
(4.42)
iaitu kerja terlaku ke atas bendalir adalah malar pada sebarang nilai radius r.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 108
2. Aliran Vorteks Paksa
Rekabentuk mesin-mesin aliran paksi yang berdasarkan aliran vorteks bebas se-
lalunya menghasilkan bilah-bilah yang terlalu melengkung. Atas sebab ini aliran
vorteks paksa dipertimbangkan,
vtr
= pemalar, C (4.43)
Dari persamaan Euler,
gHi = U (vt2 − vt1)
= Ωr (v2r + v1r)
= Ωr2 (v2 + v1) (4.44)
iaitu kerja terlaku ke atas bendalir adalah fungsi radius.
4.4.4.3 Darjah Tindakbalas
Konsep tindakbalas selalu digunakan di dalam analisis dan rekabentukmesin-mesin alir-
an paksi sebagai ukuran kadaran relatif pemindahan tenaga yang diperolehi daripada
perubahan tekanan-tekanan statik dan dinamik. Ia juga dikenali sebagai darjah tindakba-
las atau hanya tindakbalas, yang ditakrifkan sebagai
R =
(
Perubahan tenaga hasil daripada perubahan
tekanan statik di dalam pemutar
)
(
Jumlah perubahan tekanan statik
di dalam sesuatu peringkat
)
atau dalam sebutan-sebutan entalpi
R =Perubahan entalpi statik di dalam rotor
Perubahan entalpi statik di dalam satu peringkat
Perubahan tekanan di dalam pemutar ini bersaing dengan perubahan dalam halaju ben-
dalir. Dalam sebutan halaju, darjah tindakbalas boleh diungkapkan sebagai
R = 1−12
(v2t2 − v2t1
)
U (vt2 − vt1)
= 1− vt2 − vt12U
Segitiga halaju bilah pemutar mesin-mesin aliran paksi pada masukan dan keluaran ada-
lah dipengaruhi oleh magnitud tindakbalas, Rajah 4.22.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 109
U 1 = U 2 = U
U 1 = U 2 = U
U 1 = U 2 = U
W 2W 1 v2 v1
W 2W 1 v2 v1
W 2 W 1v2 v1
β2α2 β1
α1
β2
α2β1 α1
β2 α2 β1 α1
v f = vx
v f = vx
v f = vx
R > 50%ββββ2 > αααα1
R = 50%ββββ2 = αααα1
R < 50%ββββ2 < αααα1
Rajah 4.22: Pengaruh tindakbalas ke atas segitiga halaju pam aliran paksi.
4.4.5 Peronggaan di dalam Pam Rotodinamik
Apabila tekanan mutlak, pada suhu tertentu, susut ke satu nilai yang sama atau lebih ke-
cil dari tekanan wap tepu sesuatu cecair, gelembung-gelembung kecil wap terbentuk dan
pendidihan terjadi. Kesusutan ini juga menyebabkan udara terlarut di dalam cecair dike-
luarkan; pengeluaran udara terlarut bersama dengan pemelowapan menyebabkan berla-
kunya fenomena peronggaan.
Mekanisma permulaan peronggaan yang sebenar setakat ini masih dipertikaikan. Sung-
guhpun begitu, fenomena ini sering dikaitkan dengan kewujudan nukleus gas mikrosko-
pik yang menyebabkan terbentuknya gelembung-gelembung pada peringkat awal per-
onggaan. Nukleus-nukleus ini yang terdapat di dalam rongga-rongga bahan pejal di
sempadan bendalir menyebabkan bendalir tidak boleh menahan tegangan. Air, misal-
nya, dianggarkan dapat menahan tegangan dalam julat 500 ke 10,000 atm 9 jika nukleus-
nukleus tadi tidak ada.
Proses semasa gelembung tadi membesar dan kemudiannya pecah apabila tiba pada ti-
tik berlakunya tekanan tinggi berulang kali dalam jeda masa yang singkat, puluhan ribu
kali dalam sesaat, dan ini menghasilkan gelombang tekanan transient yang tinggi keama-
tannya. Tekanan tempatan yang tinggi, sehingga 4000 atm, terhasil dan suhu tempatan
91 atm ≈ 1.01325 bar

BAB 4. PENGENALANKEPADAMESIN BENDALIR 110
juga mungkin bertambah sehingga 800C di permukaan bahan-bahan yang dihempap
oleh gelembung yang pecah.
Di dalam pam rotodinamik, peronggaan biasanya terjadi pada bahagian masuk ke pen-
desak terutama sekali jika pam diletakkan terlalu tinggi di atas permukaan takungan
bekalan.
Dengan menggunakan persamaan Bernoulli antara permukaan takungan dan masukan
ke pendesak, iaitu bahagian tekanan minimum, kita memperolehi,
p0ρg
+v202g
+ z0 − hls =p1ρg
+v212g
+ z1 (4.45)
dengan,
p0 ≡ tekanan di atas permukaan takungan
biasanya (tetapi tidak semestinya) tekanan atmosfera pa
p1 ≡ tekanan pada masukan pendesak, iaitu tekanan minimum di dalam pam pmin
v1 ≡ halaju mutlak bendalir pada masukan pendesak
v0 ≡ halaju mutlak bendalir di dalam takungan, biasanya diabaikan kerana terlalu kecil
hls ≡ segala kehilangan turus antara masukan paip sedutan dan masukan pendesak
Untuk sesuatu rekabentuk pam, turus halaju v21/2g boleh di ambil sebagai satu pecahan
tertentu, katalah σ, daripada turus bersih H yang dihasilkan oleh pam. Jadi
σH =paρg
− pmin
ρg− z1 − hls (4.46)
Untuk mengelakkan peronggaan, pmin mestilah lebih besar dari tekanan wap tepu, pv,
iaitu σc > σ
σcH =paρg
− pvρg
− z1 − hls (4.47a)
= Ha − Hv − z1 − hls (4.47b)
atau,
σcH = NPSH =NPSE
g(4.48)
dengan,
σ ≡ angkali peronggaan
σc ≡ angkali peronggaan kritikal
Ha ≡ turus tekanan atmosfera
Hv ≡ turus tekanan wap tepu
NPSH ≡ Turus Sedutan Positif Bersih
≡ Net Positive Suction Head
NPSE ≡ Tenaga Sedutan Positif Bersih
≡ Net Positive Suction Energy

BAB 4. PENGENALANKEPADAMESIN BENDALIR 111
Jadi z1 mestilah dikecilkan sebanyak mungkin supaya σc > σ. Satu parameter penting
yang lahir dari analisis di atas ialah laju tentu sedutan10, Ks yang ditakrifkan seperti laju
tentu,
Ks =NQ1/2
g(NPSH)3/4(4.49)
4.5 Turbin Hidraulik
4.5.1 Pengkelasan
Turbin hidraulik boleh dikelaskan kepada
1. turbin dedenyut
2. turbin tindakbalas
Di dalam kedua-dua kelas ini, bendalir yang masuk mengenakan daya ke atas pelari
di dalam arah aliran (daya ini disebut denyut sementara pada keluaran pula, bendalir
mengenakan tindakbalas, melawan arah aliran. Untuk roda-roda dedenyut, contohnya
roda Pelton, Banki dan Turgo, kesan dedenyut adalah besar sedangkan di dalam turbin
tindakbalas, turbin Francis dan Kaplan misalnya, kesan daya tindakbalas lebih berpe-
ngaruh.
4.5.1.1 Turbin Dedenyut
Kesemua turus (≡ tenaga seunit jisim) bendalir ditukarkan kepada tenaga kinetik, iaitu
dalam bentuk turus halaju yang keluar daripada satu (atau lebih) muncung. Bendalir
(biasanya air) ditembak keluar daripada muncung ini dalam bentuk jet ke sauk atau
timba yang dipasang di susurkeliling sebuah roda yang berputar di atas satu aci. Semasa
tindakan ini, air bersentuhan dengan udara dan air yang keluar daripada sauk jatuh ke
larian ekor.
4.5.1.2 Turbin Tindakbalas
Di dalam kategori ini, aliran dari aras hulu ke aras keluar berlaku di dalam sistem pem-
buluh tertutup yang tidak terdedah kepada atmosfera pada sebarang titik di sepanjang
laluan aliran. Pada masukan ke pelari, hanya sebahagian daripada turus bendalir ditu-
karkan kepada tenaga kinetik dan lebihannya kepada tenaga atau turus tekanan.
Pelari turbin-turbin jenis ini sentiasa dipenuhi bendalir apabila bekerja sedangkan di da-
lam turbin denyut, roda Pelton misalnya, hanya beberapa sauk atau timba sahaja yang
gunakan (iaitu bersentuhan dengan bendalir) pada sesuatu masa.
10suction specific speed

BAB 4. PENGENALANKEPADAMESIN BENDALIR 112
(a) Roda Pelton (b) Turbin Banki
(c) Turbin Francis (d) Turbin Kaplan
Rajah 4.23: Turbin hidraulik.
Di bawah kategori ini terdapat beberapa kelas yang kriterianya bergantung kepada arah
aliran di dalam pelari semasa proses pemindahan tenaga berlaku; di dalam turbin Ka-
plan aliran bendalir adalah dalam arah paksi sementara aliran di dalam pelari turbin
Francis adalah dalam arah jejarian atau pun jenis aliran tercampur. Di samping dua ke-
las ini, terdapat juga turbin aliran melintang seperti turbin Turgo, Rajah 4.24.
4.5.2 Roda Pelton
Roda Pelton adalah sejenis turbin denyut. Bilah-bilah turbin ini biasanya dipanggil timba
atau sauk yang berbentuk elliptic dan dipasang ke susurkeliling sebuah roda, Rajah 4.25,
yang berputar di atas satu aci. Satu atau dua muncung, Rajah 4.26, kadang-kadang lebih,
muncung memancutkan jet air, dalam arah tangen ke susurkeliling roda, untuk meng-
hentam timba. Timba ini dibentuk menjadi dua bahagian keluar supaya jet air dapat
dipecahkan dan meninggalkan sauk secara simetrikal di kedua-dua bahagiannya. Sis-
tem injap tombak11 dan pemantul digunakan untuk mengawal kelajuan dan arah jet air
11spear valve

BAB 4. PENGENALANKEPADAMESIN BENDALIR 113
Rajah 4.24: Susunan turbin aliran melintang.
pada masukan.
4.5.2.1 Teori
Analisis matematik dibuat dengan menganggap:
1. arah halaju timba U sama seperti arah halaju mutlak jet air V1 atau Vj,
2. bendalir bertindak ke atas timba pada radius r, iaitu radius dari paksi roda ke paksi
jet,
3. bendalir meninggalkan timba pada radius r, dan
4. halaju bendalir adalah mantap dan seragam pada masukan dan keluaran.
Halaju mutlak jet V1 atau Vj ditentukan oleh turus pada muncung,
H = Hg − h f (4.50)
Nilai turus ini kemudiannya dihubungkan dengan halaju mutlak jet menerusi persama-
an berikut:
Vj = V1 = cv√
2gH (4.51)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 114
(a)
(b) (c)
Rajah 4.25: Komponen-komponen penting roda Pelton—(a) roda, (b) nozel dan injap
tombak dan (c) pemantul.
dengan
H ≡ turus pada muncung
Hg ≡ turus kasar takungan
h f ≡ kehilangan turus disebabkan geseran di dalam paip
cv ≡ pekali halaju
≃ 0.97 ke 0.99
Turus halaju di dalam paip yang menyambungkan takungan dan muncung selalunya
diabaikan kerana terlalu kecil. Jumlah tenaga yang dipindahkan ke roda diberikan oleh
persamaan Euler,
Hi =U1Vt1 −U2Vt2
g
Halaju timba adalah sama nilainya pada masukan dan hantaran,
U1 = U2 = U
jadi,
Hi =U
g(Vt1 −Vt2) (4.52)
Daripada segitiga halaju,
Vt2 = U −W2 cos(180 − θ) = U +W2 cos θ (4.53)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 115
Rajah 4.26: Roda Pelton dengan dua nozel.
v t1 = v1Segitiga halaju
masukan
Segitiga halajukeluaran
Nozel
v1
Uθθθθ
W 2
U
v t2
v2
v t1 = v1
U W 1
Rajah 4.27: Segitiga halaju roda Pelton, Douglas et al. (1985).
dan
W2 = kW1 = k (V1 −U)
Sebutan k ialah faktor pengurangan halaju relatif di sebabkan;
1. geseran di permukaan timba, dan
2. hentaman jet ke batas pemisah sauk.
Oleh itu,
Vt2 = U + k(V1 −U) cos θ (4.54)
Vt1 = V1 (4.55)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 116
menjadikan,
Hi =U
g[V1 −U − k (V1 −U) cos θ]
=U
g(V1 −U) (1− k cos θ) (4.56)
Jika k malar,
dHi
dU=
1− k cos θ
g(V1 − 2U) = 0
jadi,
V1 = 2U
U = 12V1 (4.57)
Gantikan nilaiU di atas ke dalam persamaan (4.56), ungkapan untuk pemindahan tenaga
yang maksima diperolehi sebagai;
Hi(max) =V1
2g
(V1 − 1
2V1
)(1− k cos θ)
=V21
4g(1− k cos θ)
Nisbah U/V1 dikenali sebagai nisbah laju dan analisis ini menunjukkan bahawa pemin-
dahan tenaga yangmaksima berlaku apabila nisbah laju bernilai 0.5; tetapi dalam praktik
kecekapan maksima jarang diperolehi pada titik ini, biasanya pada nisbah laju 0.46.
4.5.2.2 Ukuran Prestasi
1. Kecekapan Hidraulik
Di dalam beberapa rujukan, kecekapan ini juga dikenali sebagai kecekapan roda dan
ditakrifkan sebagai nisbah;
Kerja terlaku ke atas roda seunit berat bendalir
Turus yang ada di dalam bendalir
Iaitu,
ηh =Hi
H
=U (V1 −U) (1− k cos θ)
gH(4.58)

BAB 4. PENGENALANKEPADAMESIN BENDALIR 117
Daripada persamaan (4.51),
H =V21
2gc2v
jadi,
ηh =U (V1 −U) (1− k cos θ)
g
V21
2gc2v(4.59a)
=2c2vU (V1 −U) (1− k cos θ)
V21
(4.59b)
Pada titik pemindahan tenaga yang maksima,
U = 12V1
jadi,
ηh(max) =2c2v
12V1
(V1 − 1
2V1
)(1− k cos θ)
V21
= c2v1− k cos θ
2(4.60)
2. Kecekapan Mekanikal
Kecekapan hidraulik roda merupakan ukuran keberkesanan roda menukarkan te-
naga kinetik jet kepada tenaga mekanikal putaran. Tidak semua tenaga putaran ini
diperolehi pada aci keluaran roda kerana sebahagian daripadanya digunakan bagi
mengatasi geseran galas dan ‘windage’ (iaitu geseran antara roda dan atmosfera).
Nisbah, untuk seunit berat bendalir,
Kerja terhantar ke aci
Kerja terlaku ke atas roda
dikenali sebagai kecekapan mekanikal, ηm.
ηm =PsPo
=Ps
Ps + Po(4.61)
dengan,
Pm ≡ kehilangan kuasa disebabkan windage dan geseran
Po ≡ kuasa putaran roda hasil dari hentaman tenaga kinetik jet
= ρgHiQ
Ps ≡ kuasa yang terhantar ke aci roda
3. Kecekapan Isipadu
Selalunya di dalam roda Pelton dianggap tidak ada bocoran kerana semua air yang
keluar daripada muncung bertindak ke atas roda. Jadi kecekapan isipadu boleh
dianggap 100%.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 118
4. Kecekapan Keseluruhan
Ditakrifkan sebagai nisbah
Kerja terhantar ke aci seunit berat bendalir
Turus yang ada di dalam bendalir
memberikan persamaan untuk kecekapan keseluruhan sebagai,
η = ηm × ηh × ηv
Dalam sebutan-sebutan kuasa dan turus,
η =PsPo
× Hi
H× 1 : anggap ηv = 1
= Po − PmPo ×Hi
H
yang disusun menjadi
η =
(
1− PmρgQH1 ×Hi
H
)
(4.62a)
=Hi
H− Pm
ρgHQ(4.62b)
Ini menunjukkan bahawa kecekapan keseluruhan roda Pelton adalah lebih kecil
daripada kecekapan hidrauliknya, η < ηh.
4.5.3 Turbin Francis
Kebanyakan turbin Francis mempunyai aci tegak dan yang lain, terutama yang bersaiz
kecil, mempunyai aci mendatar.
Bendalir memasuki bekas, selalunya berbentuk volut dan kemudianmelalui laluan- lalu-
an bilah pandu, jenis pegun atau boleh laras, di sekeliling pelari yang berfungsi sebagai
alat untuk mengarah bendalir supaya masuk ke pelari pada sudut yang optimum, Ra-
jah 4.29.
Bendalir yang keluar daripada laluan-laluan bilah pandu tadi memasuki pelari dalam
arah jejari. Semasa melalui pelari, bendalir dipesongkan oleh bilah-bilah pelari supaya
momentum sudutnya bertukar dan di sini proses pemindahan tenaga, daripada bendalir
ke pelari dan seterusnya ke aci turbin, berlaku. Di bahagian keluar bilah-bilah pelari,
bendalir dipesongkan ke arah paksi pelari dan mengalir melalui tiub draf ke larian ekor.
4.5.3.1 Teori
Seperti juga pam, persamaan-persamaan keterusan, momentum dan tenaga digunakan.
Di samping itu beberapa anggapan perlu dibuat:
1. aliran mantap,

BAB 4. PENGENALANKEPADAMESIN BENDALIR 119
(a) Turbin Francis aci tegak(b) Turbin Francis aci men-
datar
Rajah 4.28: Susunan turbin Francis aci tegak dan mendatar.
2. keadaan-keadaan pada masukan dan keluaran adalah seragam
3. halaju-halaju pada masukan dan keluaran adalah seragam dalam magnitud dan
sudut yang dibuat dengan arah rujukan, dan
0 1
2
3 Larian ekor
Tiub draf
Pemutar
Bekas pil in
Bilah pandu
Aci
Rajah 4.29: Laluan bendalir menerusi turbin Francis.
4. gerakan bilah-bilah pelari hanya dalam arah lilitan, jadi hanya komponen-
komponen daya dalam arah ini sahaja yang dianggap melakukan kerja.
Daripada takrif asas,
Dayakilas sekitar sesuatu paksi
= Kadar pertambahan momentum sudut sekitar paksi tersebut

BAB 4. PENGENALANKEPADAMESIN BENDALIR 120
Jadi dayakilas yang dikenakan oleh bendalir ke atas pelari ialah,
T = ρQ (Vt1r1 −Vt2r2) (4.63)
Dayakilas yang yang diperolehi pada aci turbin adalah lebih kecil daripada yang dibe-
rikan oleh persamaan (4.63) kerana terdapat geseran pada galas-galas dan antara pelari
dan bendalir.
Kuasa yang terbentuk pada pelari
= Kerja terlaku oleh bendalir seunit masa
iaitu,
P = TΩ = ρQ (Vt1r1Ω −Vt2r2Ω)
= ρQ (U1Vt1 −U2Vt2) (4.64)
Jadi kerja terlaku oleh bendalir seunit jisim bendalir ialah,
Kerja terlaku seunit masa
Kadaralir jisim= (U1Vt1 −U2Vt2) (4.65)
Persamaan (4.65) ini dikenali sebagai persamaan Euler untuk turbin.
Arah halaju mutlakmasukan ke pemutar turbin,V1 ditentukan oleh sudut bilah pandu α1
yang dilaraskan supaya halaju relatifW1 bertemu bilah pelari pada sudut β1. Kedua-dua
sudut ini diberikan oleh
tan α1 =Vr1
Vt1(4.66)
dan
tan β1 =Vr1
U1 −Vt1(4.67)
Bagi pemutar halaju rendah—rujuk Rajah 4.30 (a)—hukum sinus memberikan
W1
sin α1=
U1
sin(β1 − α1)(4.68)
Dari teorem Bernoulli, antara masukan dan keluaran bilah pandu (stesyen 0 dan 1 Ra-
jah 4.29),
p0ρg
+V20
2g+ z0 − hgv =
p1ρg
+V21
2g+ z1
= H

BAB 4. PENGENALANKEPADAMESIN BENDALIR 121
d2
b1
U1
v t1
W 1v1
v r2
W 2
U2
αααα1 ββββ1
ββββ2
b1
b1
U1 = v t1
αααα1
v1
ββββ1
v r2W 2
U2
ΩΩΩΩ
ΩΩΩΩ
ΩΩΩΩ
v f1 = vr1
v f1 = vr1
v f1 = vr1
W 1
ββββ1v1
αααα1
v t1
U1
W 2
v r2
U2ββββ2
a. Pemutar halaju rendah
b. Pemutar halaju sederhana
c. Pemutar halaju tinggi
Rajah 4.30: Segitiga halaju turbin Francis, Rattan (1994).
Daripada persamaan di atas jumlah turus pada masukan ke pelari, H, mengandungi;
1. turus tekanan, p1/ρg,
2. turus halaju, V21 /2g,
3. turus upaya, z1,
dengan hgv mewakili kehilangan turus di dalam bilah pandu. Tenaga di dalam bendalir
yang dipindahkan ke pelari ialah Hi dan bendalir meninggalkan pelari dengan tenaga
kinetik V22 /2g. Antara masukan ke pelari (1) dan keluaran nya (2), persamaan Bernoulli
dapat ditulis sebagai,
p1ρg
+V21
2g+ z1 − Hi − hl =
p2ρg
+V22
2g+ z2

BAB 4. PENGENALANKEPADAMESIN BENDALIR 122
dan hl merupakan kehilangan tenaga di dalam pelari disebabkan oleh geseran, kejutan
dan sebagainya. Kerja terlaku ke atas pelari atau tenaga yang dipindahkan daripada
bendalir ke pelari merupakan turus melintangi pelari Hi yang diberikan oleh persamaan
Euler,
Hi =U1Vt1 −U2Vt2
g
Dari segitiga halaju pada keluaran bilah-bilah pelari,
tan β2 =Vf2
U2 −Vt2
Biasanya pada keluaran pelari dianggap tidak ada pusaran atau gelodakan, jadi Vt2 = 0.
Untukmencapai keadaan ini, bilah-bilah pelari direkabentuk supaya sudut keluarannya,
β2, dapat mengarah halaju mutlak V2 mengikut arah radius, iaitu Vf2 = V2. Oleh itu,
tan β2 =Vf2
U2=
V2
U2
dan,
Hi =U1Vt1
g
Kuasa kasar di dalam bendalir sebelum memasuki turbin, iaitu sebelum sampai pada
titik masukan ke bilah-bilah pandu, ialah
P = ρgHQ
Tetapi oleh kerana terdapat kehilangan-kehilangan hidraulik dan isipadu semasa proses
pemindahan tenaga berlaku di dalam pelari, tenaga yang dipindahkan ke pelari adalah
lebih kecil. Jadi kuasa yang dipindahkan ke pelari Po ialah
Po = ρgHiQi
= ρgHi (Q− ∆Q)
denganQi ialah kadar aliran isipadu yang bertindak ke atas pemutar turbin dan ∆Q pula
ialah kadar aliran bendalir yang bocor.
Akhir sekali, kuasa yang diperolehi pada aci keluaran turbin (iaitu kuasa yang masuk
ke penjana) adalah merupakan kuasa bersih, Ps, setelah ditolak kehilangan-kehilangan
kuasa mekanikal seperti geseran galas, cekera/piring dan sesendal kedap, Pm.
Ps = Po − Pm
4.5.3.2 Ukuran Prestasi
1. Kecekapan Hidraulik
Tidak semua turus (iaitu tenaga seunit berat) yang ada di dalam bendalir, H, di-
gunakan untuk melakukan kerja ke atas pelari. Ini adalah disebabkan wujudnya

BAB 4. PENGENALANKEPADAMESIN BENDALIR 123
kehilangan-kehilangan geseran dan ‘eddy’, hl , di dalam laluan aliran di dalam pela-
ri, menyebabkan turus sebenar yang dipindahkan ke pelari, Hi, lebih kecil
Hi = H − hl
Kecekapan hidraulik terbit dari keadaan ini dan ditakrifkan sebagai nisbah
Kerja terlaku ke atas pelari seunit berat bendalir
Turus yang ada di dalam bendalir
iaitu,
ηh =Hi
H=
H − hlH
2. Kecekapan Isipadu
Dari jumlah kadar aliran yangmemasuki turbinQ terdapat sebahagian kadar aliran
yang tidakmelalui pelari, katalah ∆Q. Jadi jumlah kadar aliran yang bekerja ke atas
pelari Qi, adalah lebih kecil dari jumlah sebenar yang masuk ke turbin;
Qi = Q− ∆Q
Sebutan ∆Q dikenali sebagai bocoran. Dengan ini kecekapan isipadu dapat ditak-
rifkan sebagai nisbah iaitu,
ηv =Qi
Q=
Q− ∆Q
Qi
3. Kecekapan Mekanikal
Kuasamekanikal yang diperolehi oleh pelari Po hasil dari tindakan dinamik benda-
lir ke atasnya adalah sebenarnya kuasa yang dipindahkan dari bendalir ke pelari.
Disebabkan adanya kehilangan kuasa mekanikal, Pm, geseran galas, sesendal ke-
dap dan sebagainya, kuasa yang diperolehi di aci (iaitu nilai kuasa yang masuk ke
penjana, Ps) adalah lebih kecil. Kecekapan mekanikal ditakrifkan sebagai
Kerja terhantar ke aci seunit berat bendalir
Kerja terlaku ke atas pelari seunit berat bendalir
iaitu,
ηm =PsPo
=Ps
ρgQiHi=
Po − PmPo
= 1− PmPo
= 1− PmρgQiHi
4. Kecekapan Keseluruhan
Parameter ini merupakan ukuran bagi menentukan keberkesanan turbin menukar
tenaga yang ada di dalam bendalir kepada tenaga yang dapat diperolehi pada aci
keluaran. Ia ditakrifkan sebagai nisbah,
Kerja terhantar ke aci keluaran
Turus atau tenaga yang ada di dalam bendalir
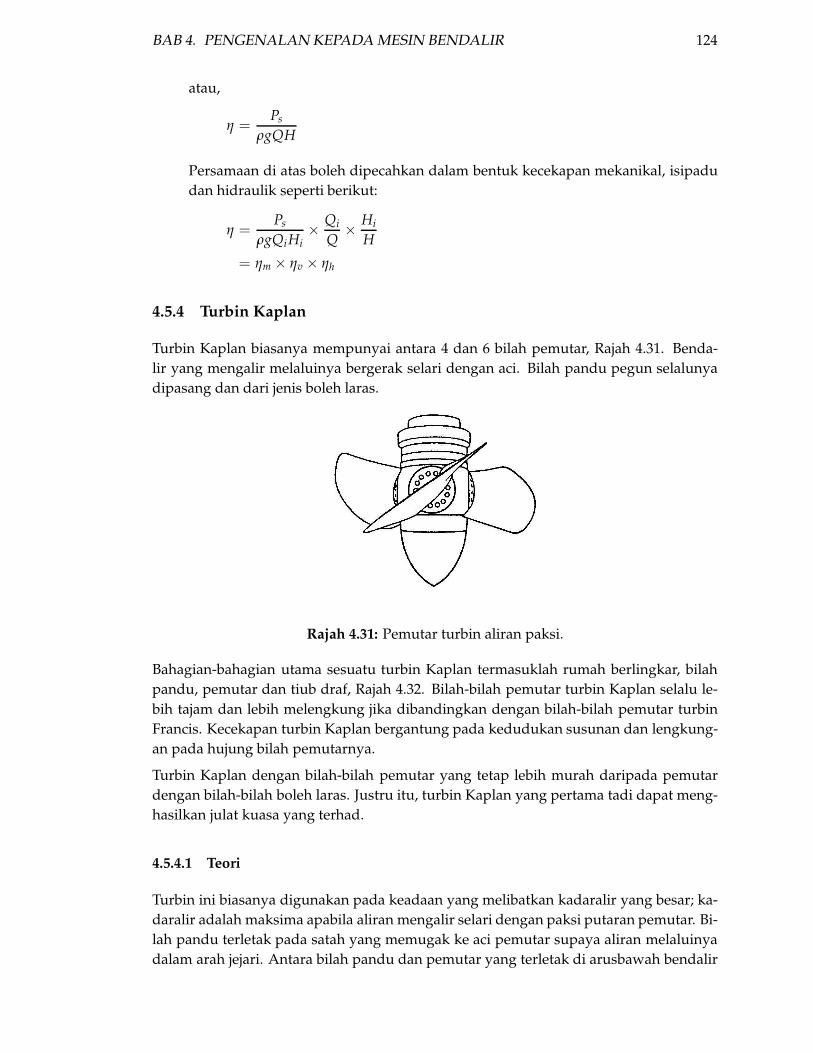
BAB 4. PENGENALANKEPADAMESIN BENDALIR 124
atau,
η =Ps
ρgQH
Persamaan di atas boleh dipecahkan dalam bentuk kecekapan mekanikal, isipadu
dan hidraulik seperti berikut:
η =Ps
ρgQiHi× Qi
Q× Hi
H
= ηm × ηv × ηh
4.5.4 Turbin Kaplan
Turbin Kaplan biasanya mempunyai antara 4 dan 6 bilah pemutar, Rajah 4.31. Benda-
lir yang mengalir melaluinya bergerak selari dengan aci. Bilah pandu pegun selalunya
dipasang dan dari jenis boleh laras.
Rajah 4.31: Pemutar turbin aliran paksi.
Bahagian-bahagian utama sesuatu turbin Kaplan termasuklah rumah berlingkar, bilah
pandu, pemutar dan tiub draf, Rajah 4.32. Bilah-bilah pemutar turbin Kaplan selalu le-
bih tajam dan lebih melengkung jika dibandingkan dengan bilah-bilah pemutar turbin
Francis. Kecekapan turbin Kaplan bergantung pada kedudukan susunan dan lengkung-
an pada hujung bilah pemutarnya.
Turbin Kaplan dengan bilah-bilah pemutar yang tetap lebih murah daripada pemutar
dengan bilah-bilah boleh laras. Justru itu, turbin Kaplan yang pertama tadi dapat meng-
hasilkan julat kuasa yang terhad.
4.5.4.1 Teori
Turbin ini biasanya digunakan pada keadaan yang melibatkan kadaralir yang besar; ka-
daralir adalah maksima apabila aliran mengalir selari dengan paksi putaran pemutar. Bi-
lah pandu terletak pada satah yang memugak ke aci pemutar supaya aliran melaluinya
dalam arah jejari. Antara bilah pandu dan pemutar yang terletak di arusbawah bendalir

BAB 4. PENGENALANKEPADAMESIN BENDALIR 125
Rajah 4.32: Laluan bendalir menerusi turbin Kaplan.
dilencungkan menerusi sudut tepat ke arah paksi. Bilah pandu berfungsi bagi membe-
rikan pusaran pada bendalir supaya bendalir menghampiri pemutar tanpa vorteks, iaitu
komponen tangen halaju mutlak pada masukan Vt1 berkadaran songsang dengan jejari,
U ∝ r dan Vt1 ∝ 1/r. Rajah 4.33 menunjukkan segitiga halaju untuk turbin aliran paksi.
Masalah perbezaan kedua-dua halaju di atas dengan jejari dapat diselesaikan dengan
mengilas bilah pemutar supaya sudut yang dibuat dengan paksi pemutar lebih besar
pada penghujung bilah dari di pangkal atau hab.
Halaju aliran Vx adalah sama pada masukan dan keluaran. Begitu juga dengan halaju
linear bilah, U; tetapi U berubah sepanjang jejari bilah, dari pangkal ke penghujungnya.
Jadi Vx1 = Vx2 = Vx dan U1 = U2 = U.
Pada kecekapan maksima, Vt2 = 0 dan V2 = Vx2 = Vx1 = Vx menjadikan persamaan
Euler,
Hi =U1Vt1 −U2Vt2
g
=U1Vt1
g
dan,
Vt1 = Vx tan α1
∝1
r
Oleh kerana turus yang bekerja ke atas pemutar Hi adalah sama pada pangkal dan peng-
hujung bilah sedangkanU lebih besar pada penghujung bilah, Vt1 mestilah dikurangkan.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 126
Ω
Bilahpemutar
α1β1
U 1
v t1
v1W 1
v x1
W 2v2
U 2U 2
W 2v2 = vx2
α2
β2β2
Masukan
Keluaran tanpa pusaran
Rajah 4.33: Segitiga halaju turbin aliran paksi.
Halaju aliran Vx perlu malar sepanjang jejari bilah pemutar. Untuk menjadikan halaju
aliran malar sepanjang jejari bilah pemutar, tan α1 mestilah dikurangkan mengarah ke
penghujung bilah dengan mengecilkan sudut α1, dan kesannya ke atas bentuk bilah ada-
lah seperti yang ditunjukkan di dalam Rajah 4.21.
4.5.4.2 Ukuran Prestasi
1. Kecekapan Hidraulik
Tidak semua turus (iaitu tenaga seunit berat) yang ada di dalam bendalir, H, di-
gunakan untuk melakukan kerja ke atas pelari. Ini adalah disebabkan wujudnya
kehilangan-kehilangan geseran dan ‘eddy’, hl , di dalam laluan aliran di dalam pela-
ri, menyebabkan turus sebenar yang dipindahkan ke pelari, Hi, lebih kecil
Hi = H − hl
Kecekapan hidraulik terbit dari keadaan ini dan ditakrifkan sebagai nisbah
Kerja terlaku ke atas pelari seunit berat bendalir
Turus yang ada di dalam bendalir
iaitu,
ηh =Hi
H=
H − hlH

BAB 4. PENGENALANKEPADAMESIN BENDALIR 127
2. Kecekapan Isipadu
Dari jumlah kadar aliran yangmemasuki turbinQ terdapat sebahagian kadar aliran
yang tidakmelalui pelari, katalah ∆Q. Jadi jumlah kadar aliran yang bekerja ke atas
pelari Qi, adalah lebih kecil dari jumlah sebenar yang masuk ke turbin;
Qi = Q− ∆Q
Sebutan ∆Q dikenali sebagai bocoran. Dengan ini kecekapan isipadu dapat ditak-
rifkan sebagai nisbah iaitu,
ηv =Qi
Q=
Q− ∆Q
Qi
3. Kecekapan Mekanikal
Kuasamekanikal yang diperolehi oleh pelari Po hasil dari tindakan dinamik benda-
lir ke atasnya adalah sebenarnya kuasa yang dipindahkan dari bendalir ke pelari.
Disebabkan adanya kehilangan kuasa mekanikal, Pm, geseran galas, sesendal ke-
dap dan sebagainya, kuasa yang diperolehi di aci (iaitu nilai kuasa yang masuk ke
penjana, Ps) adalah lebih kecil. Kecekapan mekanikal ditakrifkan sebagai
Kerja terhantar ke aci seunit berat bendalir
Kerja terlaku ke atas pelari seunit berat bendalir
iaitu,
ηm =PsPo
=Ps
ρgQiHi=
Po − PmPo
= 1− PmPo
= 1− PmρgQiHi
4. Kecekapan Keseluruhan
Parameter ini merupakan ukuran bagi menentukan keberkesanan turbin menukar
tenaga yang ada di dalam bendalir kepada tenaga yang dapat diperolehi pada aci
keluaran. Ia ditakrifkan sebagai nisbah,
Kerja terhantar ke aci keluaran
Turus atau tenaga yang ada di dalam bendalir
atau,
η =Ps
ρgQH
Persamaan di atas boleh dipecahkan dalam bentuk kecekapan mekanikal, isipadu
dan hidraulik seperti berikut:
η =Ps
ρgQiHi× Qi
Q× Hi
H
= ηm × ηv × ηh
Turbin Kaplan biasanya digunakan pada turus antara 15 ke 110 kaki dan kecekapannya
boleh mencapai julat antara 90 dan 93%, dengan kadar kesusutan kecekapannya sama
seperti turbin Francis.

BAB 4. PENGENALANKEPADAMESIN BENDALIR 128
Jadual 4.2: Bilangan bilah dan turus untuk turbin Kaplan
Bilangan bilah pemutar Turus (kaki)
4 35
5 65
6 110
4.5.5 Peronggaan di dalam Turbin Hidraulik
Biasanya peronggaan bermula apabila tekanan susut ke tahap yang terlalu rendah, ter-
utama sekali pada titik-titik yang halaju bendalir terlalu tinggi atau kedudukan turbin
yang tinggi. Dari persamaan Bernoulli, untuk sebarang titik,
p
ρg+
V2
2g+ z = pemalar
peronggaan lebih mudah berlaku jika turus halaju V2/2g dan turus upaya, z, mempu-
nyai nilai-nilai yang tinggi padamasa yang sama. Di dalam turbin, titik yang tekanannya
minima berlaku pada hujung keluaran bilah pelari, iaitu di permukaan hadapannya.
Teorem Bernoulli antara keluaran pelari dan aras air keluar memberikan,
p2ρg
+V22
2g+ z2 − hdt =
p3ρg
+V23
2g+ z3
dengan,
p3 ≡ tekanan pada aras keluar
biasanya (tetapi tidak semestinya) tekanan atmosfera pa
V3 ≡ halaju mutlak bendalir ke aras keluar
(kadang-kadang diabaikan kerana terlalu kecil)
hdt ≡ kehilangan turus disebabkan geseran di dalam tiub draf
Susunsemula persamaan di atas,
V22
2g− V2
3
2g− hdt =
paρg
+p2ρg
− z2 : z3 = 0 (datum)
Bahagian kiri ungkapan ini merupakan satu pecahan tertentu, katalah σ, daripada turus
bersih melintangi pelari Hi,
σHi =paρg
− p2ρg
− z2

BAB 4. PENGENALANKEPADAMESIN BENDALIR 129
Oleh kerana tekanan minima pmin terjadi pada keluaran pelari, iaitu di stesyen 2, jadi
p2 = pmin dan,
σHi =paρg
− pmin
ρg− z2
Peronggaan bermula apabila pmin ≤ pv, dengan pv adalah tekanan wap tepu,
σTHi =paρg
− pvρg
− z2
= Ha − Hv − z2
dengan
Ha ≡ turus tekanan atmosfera
Hv ≡ turus tekanan wap tepu
σT ≡ angkali peronggaan Thoma
Jadi untuk mengelak dari berlakunya peronggaan di dalam pelari, pmin mestilah lebih
besar daripada pv, supaya σT < σ. Ungkapan untuk σT di atas tadi dikenali sebagai
parameter peronggaan Thoma. Biasanya ungkapan ini digunakan bagi menentukan aras
maksima, zmax, di atas aras keluar. Jika pelari berada lebih tinggi daripada nilai zmax,
peronggaan lebih mudah berlaku,
zmax = Ha − Hv − σTHi

Lampiran A
Aliran Likat Dua Dimensi
A.1 Persamaan Keterusan Aliran Likat 2-Dimensi
x
y
( )vv dy
y
ρρ ∂+∂
( )uu dx
x
ρρ ∂+∂uρ
vρ
dy
dx
Rajah A.1: Aliran jisim menerusi suatu unsur bendalir.
Pertimbangkan suatu unsur segiempat bendalir yang mempunyai tepian dx dan dy serta
tebal b seperti di dalam Rajah A.1. Halaju di dalam arah-x dan y ialah u dan v.
Untuk arah-x, jisim bendalir yang tersimpan di dalam unsur bendalir seunit masa boleh
didapati dengan menolak kadar aliran keluar daripada kadar aliran masuk:
ρub dy−[
ρu +∂(ρu)
∂xdx
]
b dy = −∂(ρu)
∂xb dx dy
130

LAMPIRAN A. ALIRAN LIKAT DUA DIMENSI 131
Begitu juga dengan bendalir yang tersimpan per unit masa di dalam arah-y,
−∂(ρv)
∂yb dx dy
Hasil dari penyimpanan ini jisim di dalam unsur bendalir (ρb dx dy) sepatutnya bertam-
bah sebanyak ∂(ρb dx dy)/∂t di dalam seunit masa. Dengan itu, persamaan berikut dipe-
rolehi:
−∂(ρu)
∂xb dx dy− ∂(ρv)
∂yb dx dy =
∂(ρb dx dy)
∂t
atau
∂ρ
∂t+
∂(ρu)
∂x+
∂(ρv)
∂y= 0 (A.1)
Persamaan (A.1) disebut persamaan keterusan. Persamaan ini boleh digunakan untuk alir-
an boleh mampat tak mantap. Bagi aliran mantap, sebutan pertama, iaitu ∂ρ/∂t, adalah
sifar.
Untuk aliran tak mampat, ρ adalah malar, jadi persamaan berikut diperolehi:
∂u
∂x+
∂v
∂y= 0 (A.2)
Persamaan (A.2) boleh digunakan untuk aliran mantap tak likat.
A.2 Persamaan Momentum Aliran Likat 2-Dimensi
Rajah A.2: Unsur segiempat bendalir.
Pertimbangkan suatu unsur segiempat bendalir yang mempunyai tepian dx dan dy serta
tebal b seperti di dalam Rajah A.2.

LAMPIRAN A. ALIRAN LIKAT DUA DIMENSI 132
Menerusi hubungan hukum kedua Newton,
ma = ∑ F
daya-daya yang bertindak ke atas unsur ini, dalam arah-x dan y, ialah F(Fx, Fy):
(ρ b dx dy)︸ ︷︷ ︸
m
du
dt︸︷︷︸
ax︸ ︷︷ ︸
daya inersia
= ∑ Fx (A.3a)
(ρ b dx dy)︸ ︷︷ ︸
m
dv
dt︸︷︷︸
ay︸ ︷︷ ︸
daya inersia
= ∑ Fy (A.3b)
Bahagian kiri persamaan di atas mengungkapkan daya inersia, iaitu hasil darab jisim
dan pecutan unsur bendalir.
Perubahan halaju unsur ini adalah hasil gerakan kedudukannya serta perjalanan masa.
Jadi perubahan halaju du dalam jeda masa dt diungkapkan oleh persamaan berikut:
du =∂u
∂tdt
︸ ︷︷ ︸
perjalanan masa
+∂u
∂xdx +
∂u
∂ydy
︸ ︷︷ ︸
perubahan kedudukan
Oleh itu pecutan, dalam arah-x, ialah
du
dt=
∂u
∂t+
∂u
∂x
dx
dt+
∂u
∂y
dy
dt(A.4a)
=∂u
∂t+ u
∂u
∂x+ v
∂u
∂y(A.4b)
Begitu juga dengan perubahan halaju dv dalam jeda masa dt diungkapkan oleh persama-
an berikut:
dv =∂v
∂tdt +
∂v
∂xdx +
∂v
∂ydy
Oleh itu pecutan, dalam arah-y, ialah
dv
dt=
∂v
∂t+
∂v
∂x
dx
dt+
∂v
∂y
dy
dt(A.5a)
=∂v
∂t+ u
∂v
∂x+ v
∂v
∂y(A.5b)
Gantikan persamaan-persamaan (A.4b) dan (A.5b) ke dalam persamaan (A.3) untuk
mendapatkan
ρ
(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)
b dx dy = ∑ Fx (A.6a)
ρ
(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)
b dx dy = ∑ Fy (A.6b)

LAMPIRAN A. ALIRAN LIKAT DUA DIMENSI 133
Seterusnya, jumlah daya ∑ F yang bertindak ke atas unsur bendalir terdiri dari daya
jasad FB(Bx, By), daya tekanan FP(Px, Py) dan daya likat FS(Sx, Sy), iaitu ∑ Fx dan ∑ Fyboleh diungkapkan oleh persamaan-persamaan berikut:
∑ Fx = Bx + Px + Sx (A.7a)
∑ Fy = By + Py + Sy (A.7b)
Gantikan persamaan-persamaan (A.7) ke dalam persamaan (A.6) untuk memberikan
ρ
(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)
b dx dy = Bx + Px + Sx (A.8a)
ρ
(∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)
b dx dy = By + Py + Sy (A.8b)
Daya jasad FB(Bx,By)
Daya-daya ini bertindakmenerusi keseluruhan jisim, seperti daya graviti, daya em-
par, daya elektromagnetik dan sebagainya. Dengan meletakkan X dan Y sebagai
komponen paksi-x dan y daya-daya jasad sedemikian yang bertindak ke atas jisim
bendalir, maka
Bx = X ρ b dx dy (A.9a)
By = Y ρ b dx dy (A.9b)
Untuk daya graviti, X = 0, Y = −g.
Daya tekanan FP(Px,Py)
Daya tekanan diberikan oleh
Px = p b dy−(
p +∂p
∂xdx
)
b dy
= −∂p
∂xb dx dy (A.10a)
Py = −∂p
∂yb dx dy (A.10b)
Daya likat FS(Sx,Sy)
Daya di dalam arah-x disebabkan oleh perubahan bentuk atau perubahan sudut, Sx1,
untuk unsur bendalir (b dx dy) ialah
Sx1 =∂τ
∂yb dx dy
= µ(∂2u
∂y2+
∂2v
∂x∂y
)
b dx dy
= µ(∂2u
∂y2− ∂2u
∂x2
)
b dx dy (A.11)

LAMPIRAN A. ALIRAN LIKAT DUA DIMENSI 134
Daya di dalam arah-x disebabkan oleh penjelmaan linear, Sx2, untuk unsur bendalir
(b dx dy) ialah
Sx2 = 2µ∂2u
∂x2b dx dy (A.12)
Jadi di dalam arah-x
Sx = Sx1 + Sx2
= µ(∂2u
∂x2+
∂2u
∂y2
)
b dx dy (A.13a)
dan begitu juga di dalam arah-y,
Sy = µ( ∂2v
∂x2+
∂2v
∂y2
)
b dx dy (A.13b)
A.2.1 Persamaan Navier-Stokes Aliran Likat 2-Dimensi
Sekiranya digantikan persamaan-persamaan (A.9), (A.10) dan (A.13) ke dalam persama-
an (A.8), kita memperolehi memperolehi
ρ(∂u
∂t+ u
∂u
∂x+ v
∂u
∂y
)
= ρX − ∂p
∂x+ µ
(∂2u
∂x2+
∂2u
∂y2
)
(A.14a)
ρ( ∂v
∂t+ u
∂v
∂x+ v
∂v
∂y
)
= ρY − ∂p
∂y+ µ
(∂2v
∂x2+
∂2v
∂y2
)
(A.14b)
Persamaan (A.14) dikenali sebagai persamaan-persamaan Navier-Stokes dua dimensi. Da-
lam sebutan inersia, kadar-kadar perubahan halaju dengan kedudukan, iaitu
(
u∂u
∂x+ v
∂u
∂y
)
dan(
u∂v
∂x+ v
∂v
∂y
)
disebut pecutan konvektif, sementara kadar-kadar perubahan halaju dengan masa, iaitu
∂u
∂tdan
∂v
∂t
disebut pecutan tempatan.

Bibliografi
DIXON, S. L. (1978), Fluid Mechanics, Thermodynamics of Turbomachinery. Pergamon Press,
3rd. edition.
DOUGLAS, J. F., GASIOREK, J. M. & SWAFFIELD, J. A. (1985), Fluid Mechanics. English
Language Book Society/Pitman, 2nd. edition, ISBN 0-273-021354.
DOUGLAS, J. F., GASIOREK, J. M. & SWAFFIELD, J. A. (2001), Fluid Mechanics. Prentice
Hall, 4th. edition, ISBN 0-582-41476-8.
FOX, R. W. & MCDONALD, A. T. (1985), Introduction to Fluid Mechanics. John Wiley &
Sons, Inc., 3rd. edition, ISBN 0-471-82106-3.
HODGE, B. K. & KOENIG, K. (1995), Compressible Fluid Dynamics—With Personal Computer
Applications. Prentice Hall International, ISBN 0-13-366279-9; Prentice Hall Internatio-
nal Editions.
HUGHES, W. F. & BRIGHTON, J. A. (1999), Schaum’s Outline of Theory and Problems of Fluid
Dynamics. McGraw-Hill Book Company, 3rd. edition, ISBN 0-07-031118-8.
JAIN, A. K. (1995), Fluid Mechanics. Khanna Publishers, New Delhi, 8th. edition.
JOHN, J. E. A. (1969), Gas Dynamics. Allyn and Bacon, Library of Congress Catalog Card
Number: 69-13520.
MASSEY, B. S. (1983), Mechanics of Fluids. Van Nostrand Reinhold, 5th. edition, ISBN 0-
442-30552-4.
NAKAYAMA, Y. & BOUCHER, R. F. (1999), Introduction to Fluid Mechanics. Arnold, ISBN
0-340-67649-3.
OOSTHUIZEN, P. H. & CARSCALLEN, W. E. (1997), Compressible Fluid Flow, Mechanical
Engineering Series. The McGraw-Hill Companies, Inc., ISBN 0-07-115426-4.
POTTER, M. C. & WIGGERT, D. C. (1997), Mechanics of Fluids. Prentice Hall, ISBN 0-13-
841313-4.
RATTAN, S. S. (1994), A Text Book of Fluid Machines. Khanna Publishers, Delhi, 2nd. edi-
tion.
SAAD, M. A. (1985), Compressible Fluid Flow. Prentice-Hall, Inc.
135

BIBLIOGRAFI 136
SAYERS, A. T. (1990), Hydraulic and Compressible Flow Turbomachines. McGraw-Hill Book
Company, ISBN 0-07-707219-7.
TURTON, R. K. (1984), Principles of Turbomachinery. E. & F.N. Spon, ISBN 0-419-12500-0
Pbk.
WHITE, F. M. (1994), FluidMechanics. McGraw-Hill, Inc., 3rd. edition, ISBN 0-07-113765-3
(International Editions).