mechanistic-empirical modelling of flexible pavement ... · mechanistic-empirical modelling of...
TRANSCRIPT

Mechanistic-Empirical Modelling of Flexible Pavement Performance:
Verifications Using APT Measurements
Abubeker Worake Ahmed
PUBLIC DEFENCE OF PHD DISSERTATION
As a courtesy of the Royal Institute of Technology, KTH, Stockholm, the public defence of the
PhD dissertation will takes place on the 23rd
of May 2014 at 13:30 in room Q2, Osquldas väg 10,
KTH. The defence will be conducted in English.
External Examiner: Professor Hervè Di Benedetto, University of Lyon, France
Supervisor: Professor Sigurdur Erlingsson, KTH, VTI, and University of
Iceland
TRITA-TSC-PHD 14-003
ISBN 978-91-87353-39-0

Mechanistic-Empirical Modelling of Flexible Pavement Performance:
Verifications Using APT Measurements
Abubeker Worake Ahmed
Division of Highway and Railway Engineering, Department of Transport Science, Royal Institute
of Technology, Stockholm, Sweden
ABSTRACT
Mechanistic-Empirical (M-E) pavement design procedures are composed of a reliable response
model to estimate the state of stress in the pavement and distress models in order to predict the
different types of pavement distresses due to the prevailing traffic and environmental conditions.
One of the main objectives of this study was to develop a response model based on multilayer
elastic theory (MLET) with improved computational performance by optimizing the time
consuming parts of the MLET processes. A comprehensive comparison of the developed program
with two widely used programs demonstrated excellent agreement and improved computational
performance. Moreover, the program was extended to incorporate the viscoelastic behaviour of
bituminous materials through elastic-viscoelastic correspondence principle. A procedure based on
collocation of linear viscoelastic (LVE) solutions at selected key time durations was also proposed
that improved the computational performance for LVE analysis of stationary and moving loads. A
comparison of the LVE responses with measurements from accelerated pavement testing (APT)
revealed a good agreement.
Furthermore the developed response model was employed to evaluate permanent deformation
models for bound and unbound granular materials (UGMs) using full scale APTs. The M-E
Pavement Design Guide (MEPDG) model for UGMs and two relatively new models were
evaluated to model the permanent deformation in UGMs. Moreover, for bound materials, the
simplified form of the MEPDG model for bituminous bound layers was also evaluated. The
measured and predicted permanent deformations were in general in good agreement, with only
small discrepancies between the models.
Finally, as heavy traffic loading is one of the main factors affecting the performance of flexible
pavement, three types of characterizations for heavy traffic axle load spectrum for M-E analysis
and design of pavement structures were evaluated. The study recommended an improved approach
that enhanced the accuracy and computational performance.
Keywords: Flexible Pavement; Pavement Performance Models; Multilayer Elastic Theory; Linear
Viscoelasticity; Rutting; Accelerated Pavement Testing; Heavy Vehicle Simulator.
Mechanistic-Empirical Modelling of Flexible
Pavement Performance: Verifications Using
APT Measurements
Abubeker Worake Ahmed
Doctoral Thesis
KTH Royal Institute of Technology
School of Architecture and the Built Environment
Department of Transport Science
Division of Highway and Railway Engineering
SE-100 44 Stockholm
Stockholm 2014

© Abubeker Worake Ahmed, 2014
Doctoral Thesis
Division of Highway and Railway Engineering
Department of Transport Science
TRITA-TSC-PHD 14-003
ISBN 978-91-87353-39-0

To my father Worake Ahmed


Summary
i
Summary
In the last few decades, Mechanistic-Empirical (M-E) pavement design methods
have gained considerable interest due to their ability to model the actual
pavement characterization. M-E design procedures are primarily composed of a
reliable response model to estimate the state of stress in the pavement and distress
prediction models in order to predict the different types of pavement distresses
due to the prevailing traffic and environmental conditions.
One of the objectives of the study presented here was to develop a response
model based on multilayer elastic theory (MLET) with improved computational
performance by optimizing the time consuming parts of the MLET processes. The
convergence and accuracy of responses in the vicinity of the surface of the top
layer were improved using Richardson’s extrapolation. An iterative approach to
model stress dependency of unbound granular materials was also incorporated. A
comprehensive comparison of the program with two frequently used programs
demonstrated excellent agreement and improved computational performance.
Moreover, the program was extended to incorporate the viscoelastic nature of
bituminous materials the through elastic-viscoelastic correspondence principle. A
procedure based on collocation of linear viscoelastic (LVE) solutions at selected
key time durations was also proposed that improved the computational
performance for LVE analysis of stationary and moving loads. A comparison of
the LVE responses with measurements from accelerated pavement testing (APT)
revealed good agreement.
The second objective of this study was to evaluate permanent deformation (or
rutting) models for bound and unbound granular materials (UGMs). The
Mechanistic Empirical Pavement Design Guide (MEPDG) model for UGMs and
two relatively new models were evaluated to model the permanent deformation in
UGMs. Furthermore, for bound materials, the simplified form of the MEPDG
model for bituminous bound layers was also evaluated. A total of three series of
full scale accelerated pavement tests (APT) using a heavy vehicle simulator (HVS)

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
ii
was used to evaluate the models. In addition, test results from an extra-large
wheel tracking (ELWT) device were employed for the purpose of verification of
model parameters for bituminous bound layers. The permanent deformation,
wheel loading, pavement temperature and other material properties were
continuously controlled during the HVS and ELWT tests. Stress dependent
behaviour of unbound materials and traffic wandering were also taken into
account during the evaluations and a time hardening approach was applied to
accumulate the permanent deformation contributions from different stress levels.
The measured and predicted permanent deformations were in general in good
agreement, with only small discrepancies between the models. Model parameters
were also estimated for three different types of unbound granular materials.
Finally, as heavy traffic loading is one of the main factors affecting the
performance of flexible pavement, this study evaluated three distinct types of
characterizations of heavy traffic axle load spectrum (ALS) for M-E analysis and
design of pavement structures. The characterization of the entire ALS using an
equivalent number of standard axle loads (ESALs) of 80 kN (US) and 100 kN
(Europe) is generally employed in most empirical and few M-E design
procedures. The other alternatives are to characterize the entire ALS by Constant
Contact Area (CCA) or Constant Contact Pressure (CCP). These
characterizations were evaluated based on the predicted rutting and fatigue
cracking of several pavement structures subjected to heavy traffic ALS data
collected from bridge-weigh-in-motion stations. The results indicated that for
layers below the top 25 cm, all characterizations produced similar values of
predicted rutting. However, for the top 25 cm, the methods produced significantly
different values of predicted rutting and fatigue cracking. Even though the CCP
approach is a relatively realistic representation of the actual traffic compared to
the ESAL and CCA characterizations, it was shown that the CCP characterization
is computationally very expensive. The study proposed an improvement to the
CCA approach that enhanced the accuracy while maintaining the same level of
computational performance.
Acknowledgements
iii
Acknowledgements
First and foremost, I would like to express my special gratitude and appreciation
to my supervisor Prof. Sigurdur Erlingsson, who created the opportunities for me,
and I am honoured and privileged to have been able to work so closely with him. I
am indebted to him for his guidance, encouragement and invaluable advice over
the years.
I would like to acknowledge the substantial financial support from the Swedish
Transport Administration (Trafikverket) and the Swedish National Road and
Transport Research Institute (VTI).
I would also like to thank Hassan Hakim, Andreas Waldemarson, Håkan
Arvidsson, Tomas Halldin and Henrik Hellman at the Division of Pavement
Technology at VTI, who contributed invaluable assistance during the specimen
preparation and laboratory testing in the second half of the project.
I would also like to thank my colleagues at the Division of Pavement
Technology (väg och banteknik) at VTI. Each of you contributed to making the
Division a nice working place. Special thanks to Dr Safwat Said for his fruitful
technical discussions and encouragement. My fellow colleagues Farhad Salour,
Jonas Wennström and Shafiqur Rahman are also acknowledged for their excellent
company and for reviewing my thesis. In addition, I also want to thank my friends
Abateneh Yitayew, Markus Svensson (currently working at the Swedish Defence
Research Agency FOI), Tariku Mehari (Ericsson) and Tigist Fetene (KTH) for
their support and encouragement.
Further, I would like to extend my sincere gratitude to the staff at the VTI for
all administrative and other kinds of support that they have provided me over the
years.
Finally, I would like to express my special thanks to my mother Jemila Redi,
who has always believed in me, her support has been tremendous; words cannot
express how grateful I am.

iv
List of Acronyms
v
List of Acronyms
AASHTO American Association of State Highway and Transport Officials
ALS Axle Load Spectra
APT Accelerated Pavement Testing
BWIM Bridge Weight-in-Motion
CalME California Mechanistic-Empirical Pavement Design Program
CCA Constant Contact Area
CCP Constant Contact Pressure
ELWT Extra-Large Wheel Tracking
ERAPAVE Elastic Response Analysis of Pavements
ESAL Equivalent Standard Axle Load
FEM Finite Element Method
FWD Falling Weight Deflectometer
HMA Hot Mix Asphalt
HVS Heavy Vehicle Simulator
LVE Linear Viscoelastic
M-E Mechanistic–Empirical
MEPDG Mechanistic-Empirical Pavement Design Guide
MLET Multilayer Elastic Theory
PEDRO Permanent Deformation of asphalt for Roads
PMS Pavement Management System
STA Swedish Transport Administration
UGMs Unbound Granular Materials
VEROAD Viscoelastic Road Analysis Delft
VTI Swedish National Road and Transport Research Institute
WIM Weigh-in-Motion


Table of Contents
vii
Table of Contents
Summary ................................................................................................................... i
Acknowledgements ................................................................................................. iii
List of Acronyms ..................................................................................................... v
Table of Contents ................................................................................................... vii
List of Publications ................................................................................................. ix
1. Introduction .......................................................................................................... 1
1.1. Distresses in Pavements ................................................................................ 2
1.2. Use of Distress Models in Pavement Management System ......................... 5
1.3. Objectives and Scope of the Research .......................................................... 6
2. Pavement Performance Modelling ....................................................................... 9
2.1. Response Model for M-E Design Procedures ............................................... 9
2.2. Performance Modelling of Unbound Granular Materials ........................... 13
2.3. Modelling Permanent Deformation in UGMs ............................................ 17
2.4. Performance of Asphalt Bound Materials .................................................. 19
2.5. Modelling Permanent Deformation in Asphalt Mixtures ........................... 21
2.6. Characterization of Traffic .......................................................................... 22
2.7. Time Hardening Procedure ......................................................................... 26
3. Test Equipment, Structures and Materials ......................................................... 29
3.1. Full Scale Accelerated Pavement Tests ...................................................... 29
3.2. Extra-Large Wheel Tracking Tests ............................................................. 31
4. Response Models for Flexible Pavements ......................................................... 33
4.1. Multi-Layer Elastic Theory ........................................................................ 33
4.2. Linear Viscoelastic Theory ......................................................................... 36
5. Evaluation of Permanent Deformation Models ................................................. 39
5.1. Permanent Deformation Models for UGMs ............................................... 39
5.2. Permanent Deformation Model for Bituminous Bound Layers .................. 41
6. Characterization of Heavy Traffic Axle Load Spectrum ................................... 43

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
viii
7. Conclusions and Recommendations .................................................................. 47
7.1. Response Model .......................................................................................... 47
7.2. Permanent Deformation Models ................................................................. 48
7.3. Heavy Vehicle Characterization ................................................................. 49
7.4. Limitations and Recommendations for Future Studies............................... 49
References .............................................................................................................. 51

List of Publications
ix
List of Publications
Paper I Erlingsson, S., and Ahmed, A. W., 2013. Fast layered elastic
response program for the analysis of flexible pavement structures,
Road Materials and Pavement Design, 14(1), pp. 196-210, DOI:
10.1080/14680629.2012.757558. The author of this thesis carried out the development of theory, the
programming, and was involved in the write-up.
Paper II Ahmed, A. W., and Erlingsson, S., 2013. Evaluation of permanent
deformation models for unbound granular materials using
accelerated pavement tests, Road Materials and Pavement Design,
14(1), pp. 178-195, DOI: 10.1080/14680629.2012.755936. The author of this thesis carried out the analysis of the data, the
development of theory and the write-up.
Paper III Ahmed A. W., and Erlingsson, S., 2012. Modeling of flexible
pavement structure behaviour–Comparisons with HVS
measurements In D. Jones, J. Harvey, A. Mateos, and I. Al-Qadi,
(Eds). Advances in Pavement Design through Full-scale Accelerated
Pavement Testing, pp. 493-503, New York: CRC Press. The author of this thesis analysed the data, carried out the development of
theory and the write-up.
Paper IV Ahmed, A. W., and Erlingsson, S., 2013. Characterization of heavy
traffic axle load spectra for mechanistic-empirical pavement design
applications. Accepted for publication in International Journal of
Pavement Engineering. The author of this thesis carried out the data analysis, the development of
theory and the write-up.
Paper V Ahmed, A. W., and Erlingsson, S., 2014. Viscoelastic modelling of
pavement structure behaviour in a full scale accelerated pavement
test. Submitted to International Journal of Pavement Engineering. The author of this thesis carried out the analysis of the data, the implementation of
the viscoelastic approach used and the write-up.
Paper VI Ahmed A. W., and Erlingsson, S., 2014. Evaluation of a permanent
deformation model for asphalt concrete mixtures using extra-large
wheel tracking and heavy vehicle simulator tests. Submitted to Road
Materials and Pavement Design. The author of this thesis carried out the ELWT tests, performed the analysis of
data from both the ELWT and HVS tests, and was involved in the write-up.

x

Introduction
1
1. Introduction
Flexible pavement flexes or deforms when subjected to wheel loads. A flexible
pavement is typically constructed of several layers of materials, traditionally with
the stiffer layers (usually made of asphalt materials) placed at the top and weaker
layers at the bottom. The major functions of flexible pavements are, among
others, to distribute the traffic loading in order to protect the subgrade from
excessive stress and to provide a better ride quality.
When subjected to excessive traffic loading and/or severe climatic condition,
pavements start to deteriorate and as a result the performance of pavement starts
to decline, which in turn affects the safety of road users.
Permanent deformation on the pavement surface along the wheel path, usually
referred to as rutting, is one of the major deteriorations that affect the ride quality
as well as safety of road users by leading to hydroplaning, which decreases the
skid resistance of the surface and eventually makes steering difficult as the rutting
increases in depth.
Pavements are designed using either the pure empirical or Mechanistic-
Empirical (M-E) procedures. The empirical procedures developed from the 1950
road test by the American Association of State Highway and Transport Officials
(AASHTO) are the basis for most existing empirical design procedures in use
worldwide. However these procedures are subjected to growing uncertainties due
to the fact that today’s pavement design data exceed the data used in the 1950s
AASHTO road test. In addition, these procedures have no mechanistic basis to
verify that the stresses, strains or deformations which are induced due to traffic
loads and environmental conditions are within the allowable limits.
The M-E design philosophy, on the other hand, applies a more realistic
characterization of pavement structures and the related variables. The responses
(stresses and strains) in the pavement due to traffic loading, and prevailing
environmental conditions are calculated using a response model. Distresses are
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
2
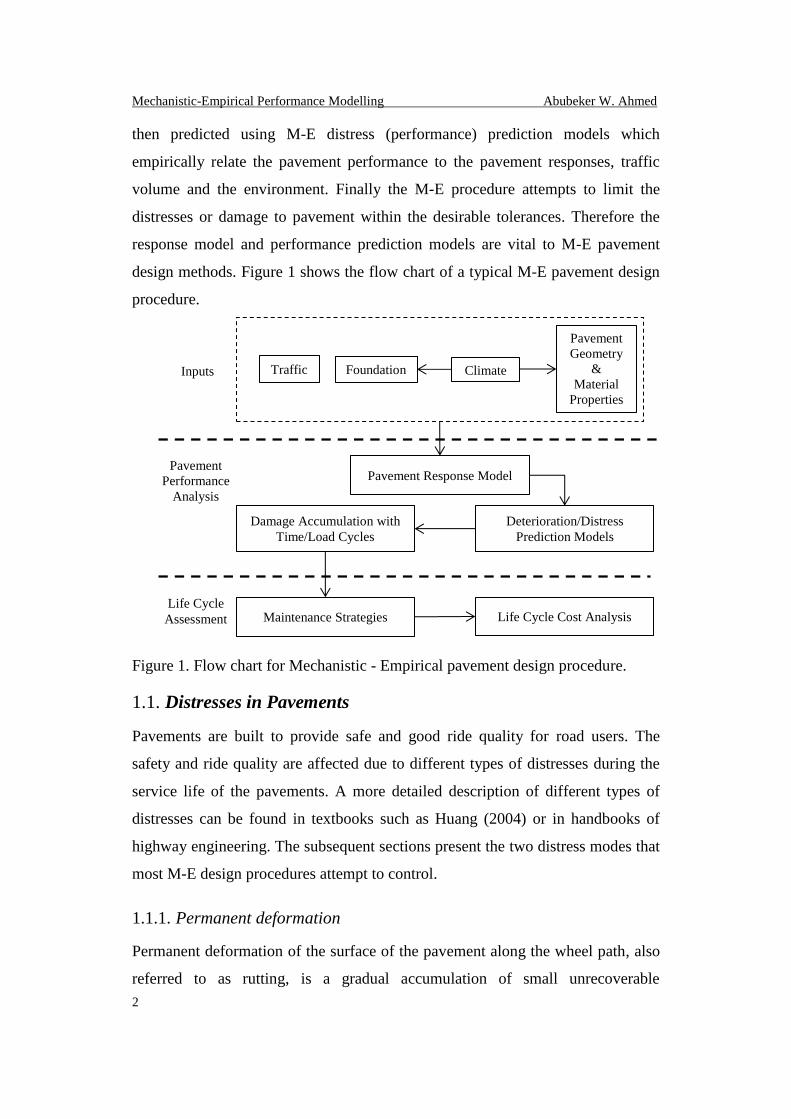
then predicted using M-E distress (performance) prediction models which
empirically relate the pavement performance to the pavement responses, traffic
volume and the environment. Finally the M-E procedure attempts to limit the
distresses or damage to pavement within the desirable tolerances. Therefore the
response model and performance prediction models are vital to M-E pavement
design methods. Figure 1 shows the flow chart of a typical M-E pavement design
procedure.
Figure 1. Flow chart for Mechanistic - Empirical pavement design procedure.
1.1. Distresses in Pavements
Pavements are built to provide safe and good ride quality for road users. The
safety and ride quality are affected due to different types of distresses during the
service life of the pavements. A more detailed description of different types of
distresses can be found in textbooks such as Huang (2004) or in handbooks of
highway engineering. The subsequent sections present the two distress modes that
most M-E design procedures attempt to control.
1.1.1. Permanent deformation
Permanent deformation of the surface of the pavement along the wheel path, also
referred to as rutting, is a gradual accumulation of small unrecoverable
Foundation Climate
Pavement
Geometry
&
Material
Properties
Traffic
Pavement Response Model
Deterioration/Distress
Prediction Models
Damage Accumulation with
Time/Load Cycles
Maintenance Strategies
Pavement
Performance
Analysis
Life Cycle Cost Analysis
Inputs
Life Cycle
Assessment
Introduction
3
deformations, in both bound and unbound granular pavement layers, as a result of
applied traffic load (Huang, 2004; Sousa et al., 1991). Rutting occurs when the
pavement layers consolidate (or change in volume) due to traffic loading. Rutting
may also have associated transverse displacement due to shear failure (FHWA,
2003).
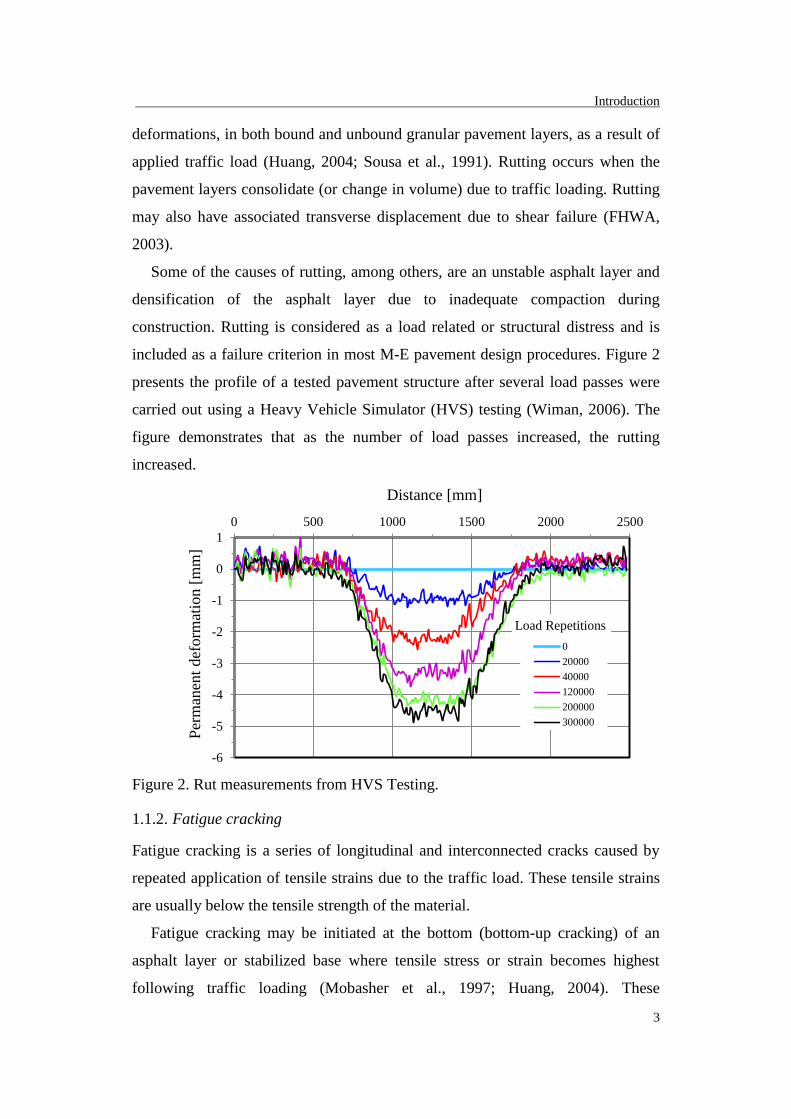
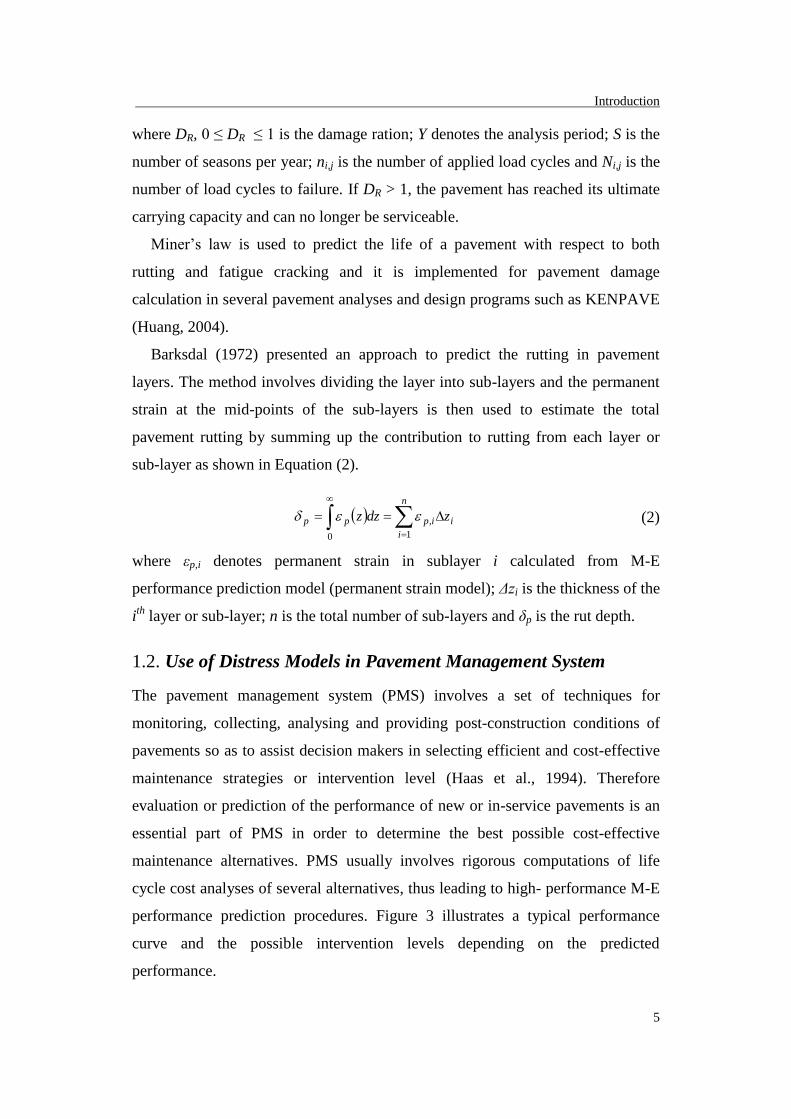
Some of the causes of rutting, among others, are an unstable asphalt layer and
densification of the asphalt layer due to inadequate compaction during
construction. Rutting is considered as a load related or structural distress and is
included as a failure criterion in most M-E pavement design procedures. Figure 2
presents the profile of a tested pavement structure after several load passes were
carried out using a Heavy Vehicle Simulator (HVS) testing (Wiman, 2006). The
figure demonstrates that as the number of load passes increased, the rutting
increased.
Figure 2. Rut measurements from HVS Testing.
1.1.2. Fatigue cracking
Fatigue cracking is a series of longitudinal and interconnected cracks caused by
repeated application of tensile strains due to the traffic load. These tensile strains
are usually below the tensile strength of the material.
Fatigue cracking may be initiated at the bottom (bottom-up cracking) of an
asphalt layer or stabilized base where tensile stress or strain becomes highest
following traffic loading (Mobasher et al., 1997; Huang, 2004). These
-6
-5
-4
-3
-2
-1
0
1
0 500 1000 1500 2000 2500
Per
man
ent
def
orm
atio
n [
mm
]
Distance [mm]
0
20000
40000
120000
200000
300000
Load Repetitions
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
4
microscopic cracks propagate through the material to the top of the layer and form
one or more longitudinal wheel path cracks which, after repeated application of
loading, interconnect with each other and form cracks with a pattern like the skin
of an alligator (Huang, 2004). It is also observed that fatigue cracking may be
initiated at or near the surface of the pavement and propagate downward (top-
down cracking), which commonly occurs in hot mix asphalt pavements (Wang et
al., 2003; Wang et al., 2007).
Fatigue cracking, in general, is described as a two-phase process, initiation
followed by propagation. The initiation phase of fatigue cracking on the surface is
characterized by microcracks that are instigated in places where high cyclic shear
or tensile stress occurs (Daniel et al, 2001). The mechanism of top-down cracking
is very complicated; however, Wang el al. (2003) indicated that both tensile-type
and shear-type cracking may initiate top-down cracking. Once the crack initiation
develops and starts to propagate, further loading may lead to the propagation
phase which is characterized by macrocracks. Fatigue cracking occurs mostly in
areas which are subjected to repeated traffic loading. Therefore fatigue cracking is
considered as a structural (load related) distress and it is incorporated in most M-E
pavement design methods.
1.1.3. Modelling distresses in pavements
In pavement structures, it is believed that each passage of traffic load contributes a
certain amount of damage to the pavement that gradually accumulates over time
and eventually leads to pavement failure. Therefore pavements are designed to
span a specific amount of design life, after which the pavement is assumed to be
no longer serviceable.
The prediction of pavement life for rutting and fatigue cracking was first
introduced by Shell’s pavement design method (Dorman, 1962; Sousa et al., 1991;
Huang, 2004). The damage calculation is performed according to Miner’s law
where failure due to the combined loading occurs when:
Y
i
S
j ji
ji
RN
nD
1 1 ,
, (1)
Introduction
5
where DR, 0 ≤ DR ≤ 1 is the damage ration; Y denotes the analysis period; S is the
number of seasons per year; ni,j is the number of applied load cycles and Ni,j is the
number of load cycles to failure. If DR > 1, the pavement has reached its ultimate
carrying capacity and can no longer be serviceable.
Miner’s law is used to predict the life of a pavement with respect to both
rutting and fatigue cracking and it is implemented for pavement damage
calculation in several pavement analyses and design programs such as KENPAVE
(Huang, 2004).
Barksdal (1972) presented an approach to predict the rutting in pavement
layers. The method involves dividing the layer into sub-layers and the permanent
strain at the mid-points of the sub-layers is then used to estimate the total
pavement rutting by summing up the contribution to rutting from each layer or
sub-layer as shown in Equation (2).
n
i
iippp zdzz
1
,
0
(2)
where εp,i denotes permanent strain in sublayer i calculated from M-E
performance prediction model (permanent strain model); Δzi is the thickness of the
ith
layer or sub-layer; n is the total number of sub-layers and δp is the rut depth.
1.2. Use of Distress Models in Pavement Management System
The pavement management system (PMS) involves a set of techniques for
monitoring, collecting, analysing and providing post-construction conditions of
pavements so as to assist decision makers in selecting efficient and cost-effective
maintenance strategies or intervention level (Haas et al., 1994). Therefore
evaluation or prediction of the performance of new or in-service pavements is an
essential part of PMS in order to determine the best possible cost-effective
maintenance alternatives. PMS usually involves rigorous computations of life
cycle cost analyses of several alternatives, thus leading to high- performance M-E
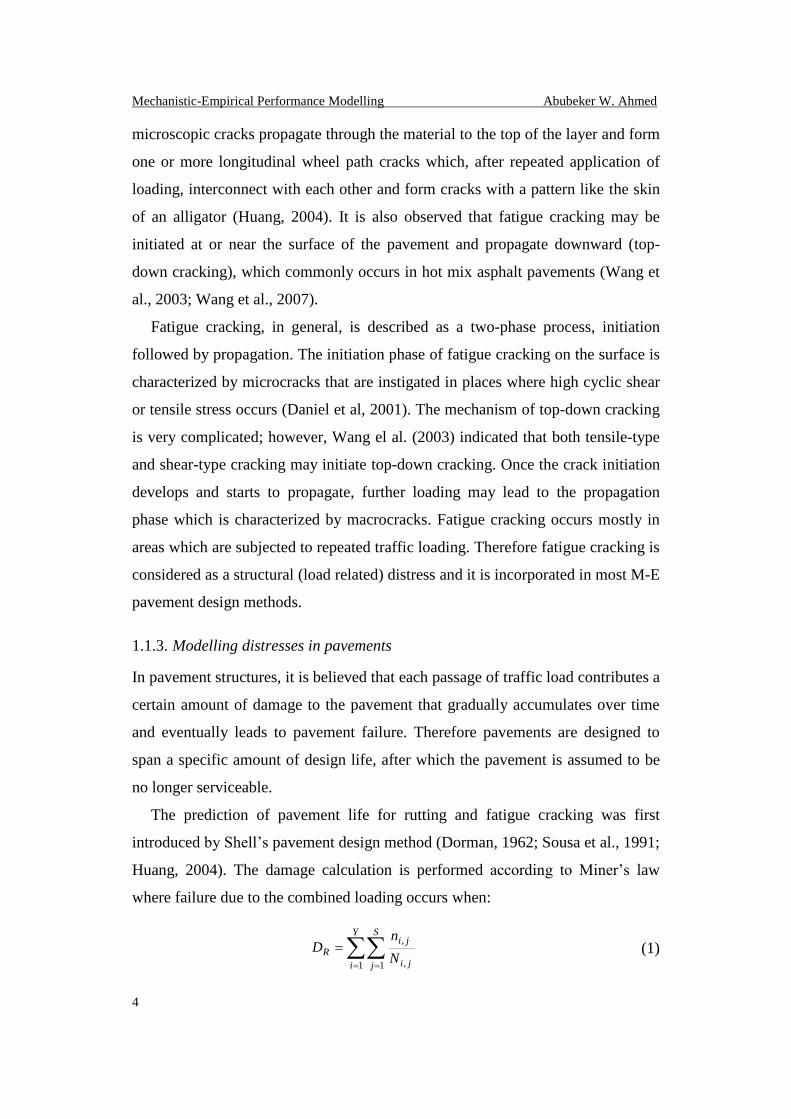
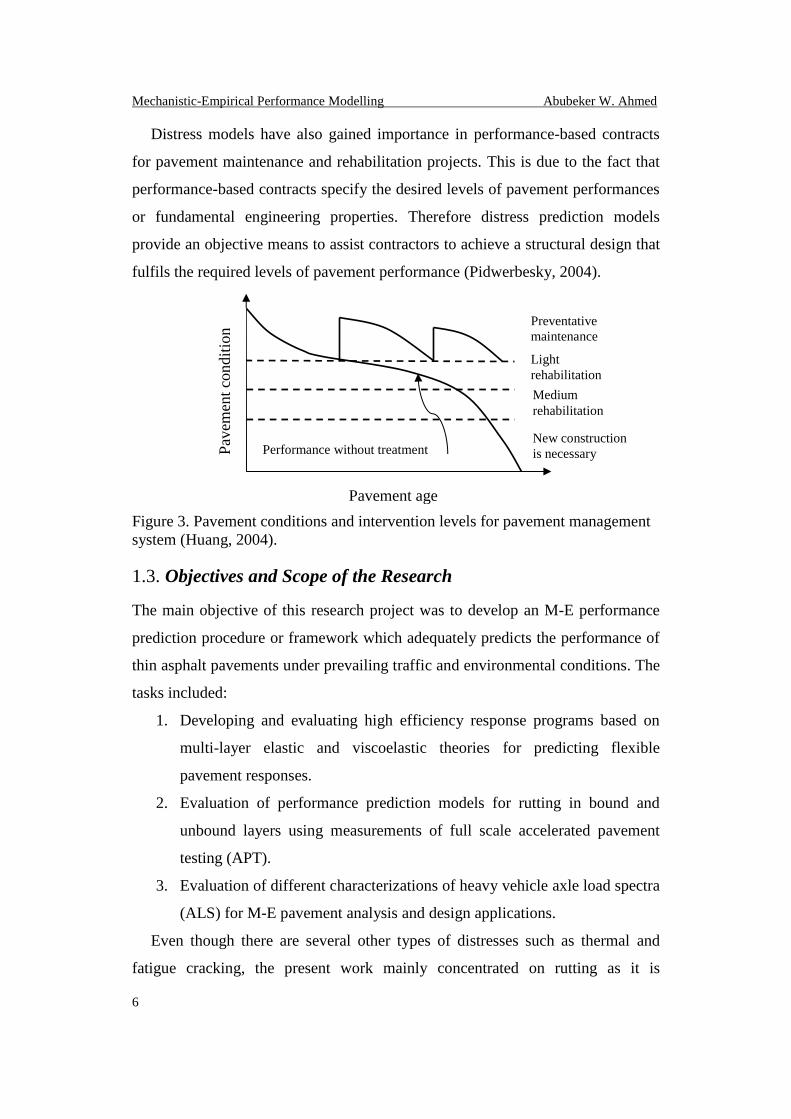
performance prediction procedures. Figure 3 illustrates a typical performance
curve and the possible intervention levels depending on the predicted
performance.
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
6
Distress models have also gained importance in performance-based contracts
for pavement maintenance and rehabilitation projects. This is due to the fact that
performance-based contracts specify the desired levels of pavement performances
or fundamental engineering properties. Therefore distress prediction models
provide an objective means to assist contractors to achieve a structural design that
fulfils the required levels of pavement performance (Pidwerbesky, 2004).
Figure 3. Pavement conditions and intervention levels for pavement management
system (Huang, 2004).
1.3. Objectives and Scope of the Research
The main objective of this research project was to develop an M-E performance
prediction procedure or framework which adequately predicts the performance of
thin asphalt pavements under prevailing traffic and environmental conditions. The
tasks included:
1. Developing and evaluating high efficiency response programs based on
multi-layer elastic and viscoelastic theories for predicting flexible
pavement responses.
2. Evaluation of performance prediction models for rutting in bound and
unbound layers using measurements of full scale accelerated pavement
testing (APT).
3. Evaluation of different characterizations of heavy vehicle axle load spectra
(ALS) for M-E pavement analysis and design applications.
Even though there are several other types of distresses such as thermal and
fatigue cracking, the present work mainly concentrated on rutting as it is
Pavement age
Pav
emen
t co
ndit
ion
Preventative
maintenance
Light
rehabilitation
Performance without treatment
Medium
rehabilitation
New construction
is necessary

Introduction
7
considered the most important distress mode. Furthermore, the framework was
designed in such a way that other types of distresses can easily be incorporated in
the future.


Pavement Performance Modelling
9
2. Pavement Performance Modelling
The subsequent sections present a short literature review of the selected works
which are deemed essential for M-E performance modelling of flexible pavement
structures. The survey focused on the response model for pavement analysis and
permanent deformation (rutting) behaviour of unbound granular materials
(UGMs) and asphalt mixtures.
2.1. Response Model for M-E Design Procedures
The multilayer elastic theory (MLET), first introduced by Burmister (1943, 1945),
is by far the most common response model employed for analysis of layered
systems, as shown in Figure 4 (Acum and Fox, 1951; Ahlvin and Ulery, 1962;
Jones, 1962; Peattie, 1962; Verstraeten, 1967; Hunag, 1968; Bufler, 1971; Van
Cauwelaert and Lequeux, 1986; Maina and Matsui, 2005; Khazanovich and
Wang, 2007). Other alternatives for analysis of layered pavement systems include
Odemark’s method of equivalent thickness (Ullidtz, 1987) and the 3D finite
element method (FEM). The FEM is more comprehensive in its ability to model
characteristics of real pavement structures such as a wide variety of nonlinear
material behaviour; however it is computationally expensive when compared to
the MLET (ARA, 2004). Therefore most M-E pavement design procedures
employ the MLET due to its simplicity and computational performance. For
instance the US Mechanistic-Empirical Pavement Design Guide (MEPDG)
implements a layered elastic program JULEA (ARA, 2004).
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
10
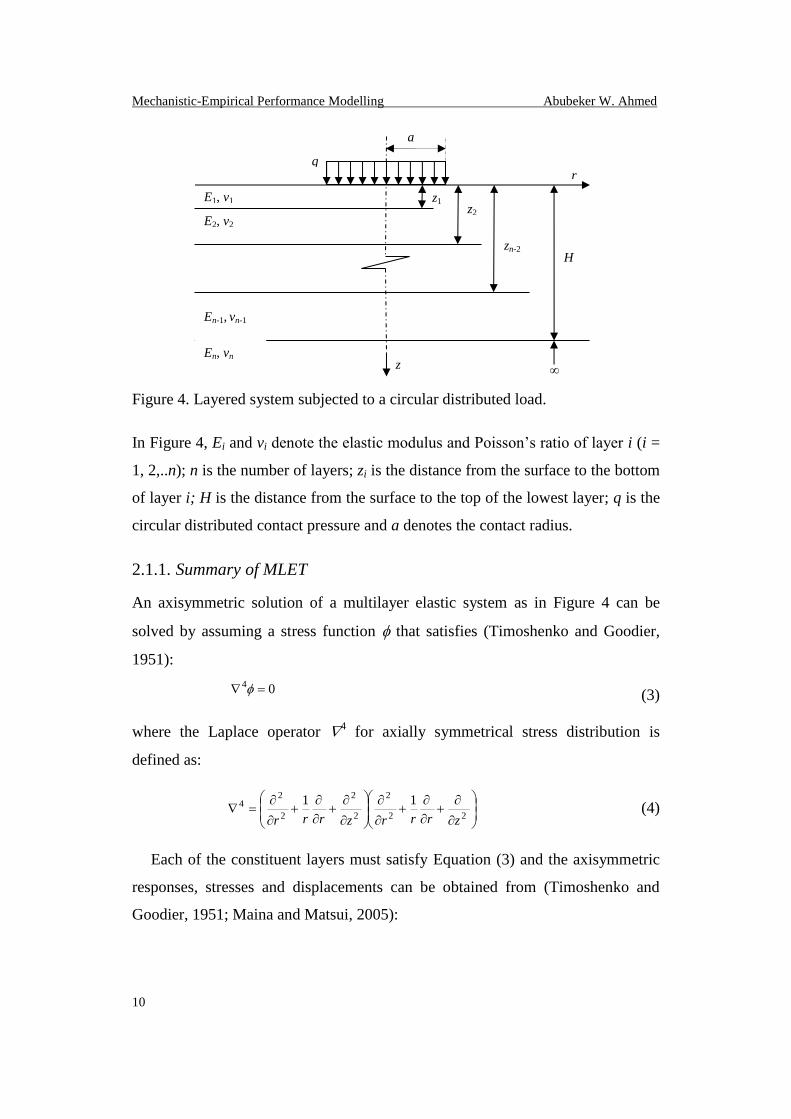
Figure 4. Layered system subjected to a circular distributed load.
In Figure 4, Ei and vi denote the elastic modulus and Poisson’s ratio of layer i (i =
1, 2,..n); n is the number of layers; zi is the distance from the surface to the bottom
of layer i; H is the distance from the surface to the top of the lowest layer; q is the
circular distributed contact pressure and a denotes the contact radius.
2.1.1. Summary of MLET
An axisymmetric solution of a multilayer elastic system as in Figure 4 can be
solved by assuming a stress function that satisfies (Timoshenko and Goodier,
1951):
04 (3)
where the Laplace operator 4 for axially symmetrical stress distribution is
defined as:
22
2
2
2
2
24 11
zrrrzrrr (4)
Each of the constituent layers must satisfy Equation (3) and the axisymmetric
responses, stresses and displacements can be obtained from (Timoshenko and
Goodier, 1951; Maina and Matsui, 2005):
q
E2, v2
E1, v1
z
H zn-2
z2 z1
En-1, vn-1
En, vn
a
∞
r

Pavement Performance Modelling
11
2
2
2
2
2
2
2
2
3
3
10
1121
1
)1(
1
)2(
zrE
rrrEE
zrr
rrzz
rzz
zz
u
w
rz
t
r
z
(5)
in which v and E are the Poisson’s ratio and modulus of elasticity of the material,
respectively; and σ, τ, w and u are normal stress, shear stress, vertical
displacement and radial displacement, respectively. The stress function for the
ith
layer (i = 1 to n) which satisfies Equation (3) is given by (Huang, 2004):
)()(
)()(
2
03
1
1)(,
ii
ii
mi
mi
mi
mi
iemDemC
eBeA
m
mJHzr
(6)
where ρ = r/H, λ = z/H, λi = zi/H; Ai, Bi, Ci and Di are integration constants for the
ith
layer which are obtained from the boundary and continuity condition; J0 is the
Bessel function of the first kind and order 0 and m is the Hankel parameter (Van
Cauwelaert, 2003). The integration constants are determined from the solution of
a matrix equation of the form ZX = Y where Z and Y are matrix of 4n-2 4n-2 and
4n-2 1, respectively, which are assembled from the boundary and continuity
conditions; X is a column vector of the unknown integration constants.
Introducing Equation (6) into Equation (5) yields the solution of the layered
system under concentrated load P = -mJ0 (mρ). Therefore the responses due to a
circular distributed load q over radius a can be found by integrating:
0
1 )( dmH
amJ
m
S
H
aqS
c
(7)
where S is the response due to a distributed load of q and Sc is the response due to
a concentrated load of P = -mJ0 (mρ).
The infinite integral in Equation (7) is evaluated using numerical integration
(Van Cauwelaert and Lequeux, 1986; Hayhoe, 2002; Huang, 2004; Maina and
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
12
Matsui, 2005; Khazanovich and Wang, 2007). The integral in Equation (7) is a
time consuming process for M-E pavement design applications where a repeated
application of response computation is needed. In addition, for locations close to
the surface of the top layer, the convergence of the integral is very slow (Maina
and Matsui, 2005; Khazanovich and Wang, 2007). Khazanovich and Wang (2007)
thus suggested the use of interpolation and tabulated values of stresses in order to
improve the computational performance of MLET. Maina and Matsui (2005)
employed Richardson’s extrapolation to improve the convergence of near surface
responses.
2.1.2. Extension of MLET for problems involving linear viscoelasticity (LVE)
Asphalt mixtures exhibit unique characteristics of both viscous and elastic
properties, and hence are categorized as viscoelastic materials. Moreover,
understanding the viscoelastic properties of asphalt mixtures is important to
achieve performance-based structural design of bituminous layers (ARA, 2004).
Therefore it is important to extend the theory of MLET to account for the effect of
viscoelasticity. This can be achieved by means of the elastic–viscoelastic
correspondence principle which states that the solutions of linear viscoelastic
(LVE) problems can be derived from corresponding solutions of linear elastic
problems in Laplace space (Chou, 1969; Huang, 2004; Kim, 2011).
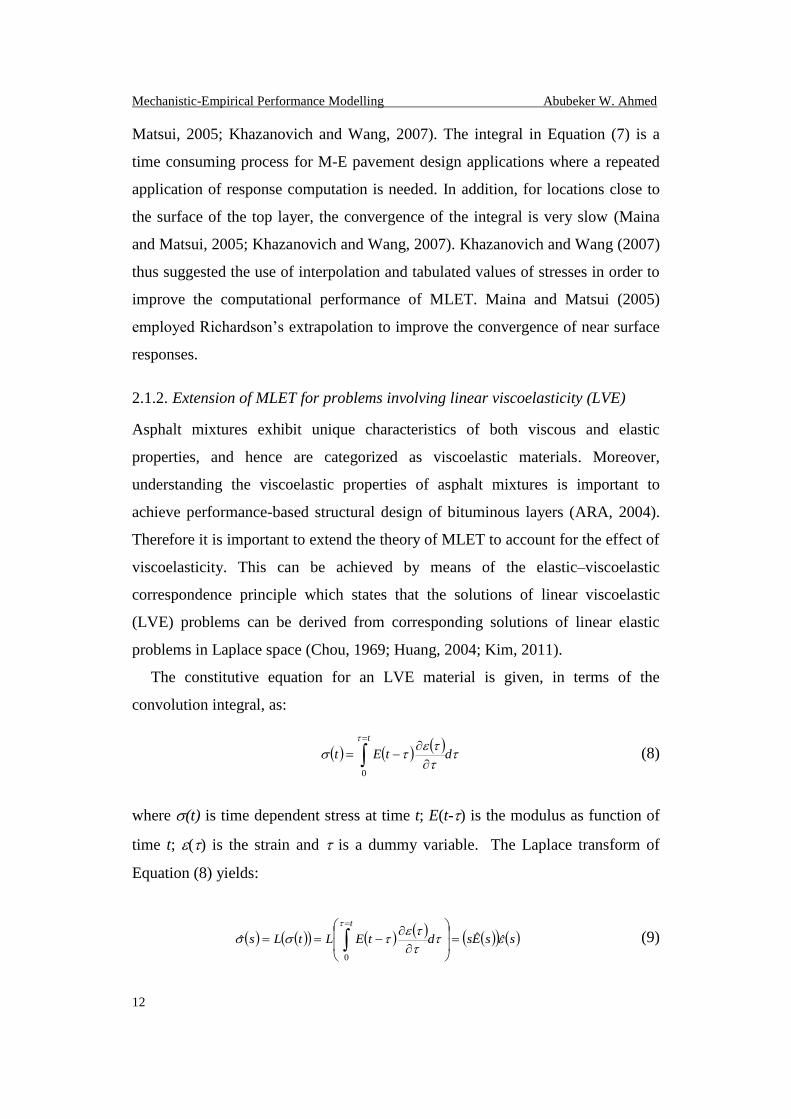
The constitutive equation for an LVE material is given, in terms of the
convolution integral, as:
dtEt
t
0
(8)
where (t) is time dependent stress at time t; E(t-) is the modulus as function of
time t; () is the strain and is a dummy variable. The Laplace transform of
Equation (8) yields:
ssEsdtELtLs
t
ˆˆˆ
0
(9)
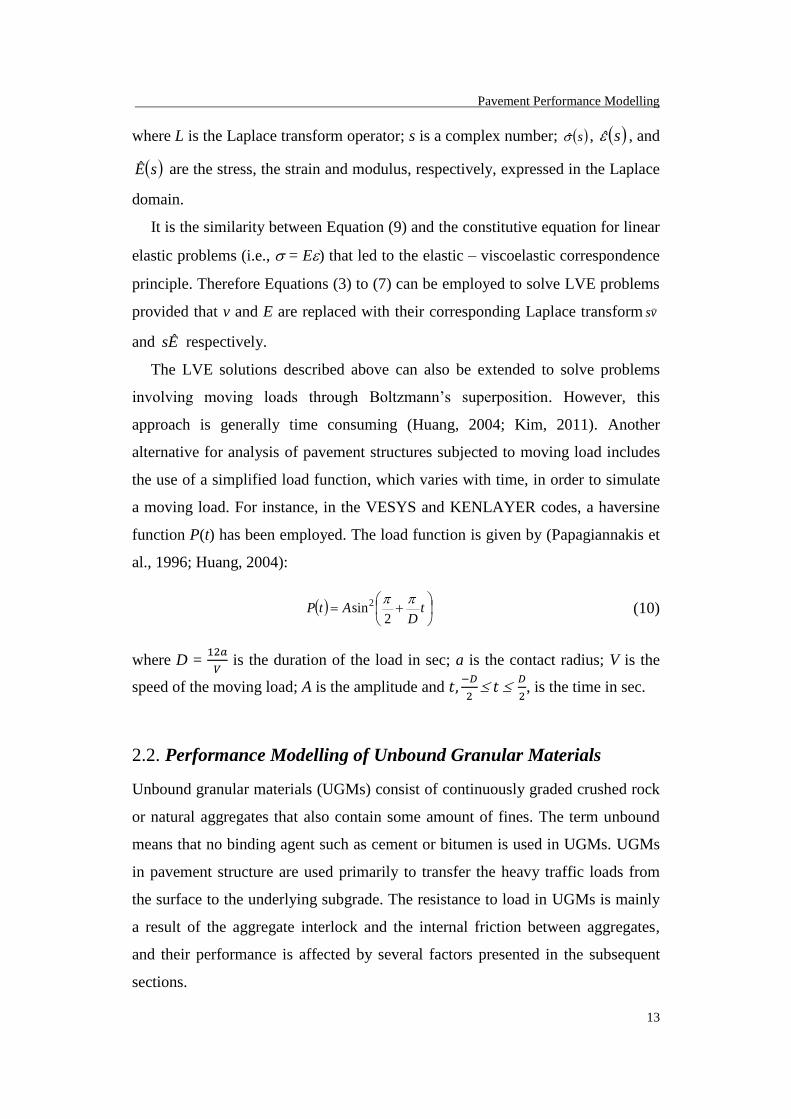
Pavement Performance Modelling
13
where L is the Laplace transform operator; s is a complex number; s , s , and
sE are the stress, the strain and modulus, respectively, expressed in the Laplace
domain.
It is the similarity between Equation (9) and the constitutive equation for linear
elastic problems (i.e., = E) that led to the elastic – viscoelastic correspondence
principle. Therefore Equations (3) to (7) can be employed to solve LVE problems
provided that v and E are replaced with their corresponding Laplace transform vs
and Es ˆ respectively.
The LVE solutions described above can also be extended to solve problems
involving moving loads through Boltzmann’s superposition. However, this
approach is generally time consuming (Huang, 2004; Kim, 2011). Another
alternative for analysis of pavement structures subjected to moving load includes
the use of a simplified load function, which varies with time, in order to simulate
a moving load. For instance, in the VESYS and KENLAYER codes, a haversine
function P(t) has been employed. The load function is given by (Papagiannakis et
al., 1996; Huang, 2004):
t
DAtP
2sin2
(10)
where D =
is the duration of the load in sec; a is the contact radius; V is the
speed of the moving load; A is the amplitude and
, is the time in sec.
2.2. Performance Modelling of Unbound Granular Materials
Unbound granular materials (UGMs) consist of continuously graded crushed rock
or natural aggregates that also contain some amount of fines. The term unbound
means that no binding agent such as cement or bitumen is used in UGMs. UGMs
in pavement structure are used primarily to transfer the heavy traffic loads from
the surface to the underlying subgrade. The resistance to load in UGMs is mainly
a result of the aggregate interlock and the internal friction between aggregates,
and their performance is affected by several factors presented in the subsequent
sections.

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
14
2.2.1. State of stresses and stress history of UGMs
Several studies have indicated that the stress state of UGMs substantially
influences the rutting performance of UGMs. The state of stress at an arbitrary
point in UGM, as shown in Figure 5, can be expressed in tensor form as:
zzyzx
yzyyx
xzxyx
S
(11)
Figure 5. Stress state of UGMs subjected to traffic loading.
The mean stress (also referred to as hydrostatic stress) is defined as the mean of
the normal stresses and is given by:
3
zyx
m
(12)
Then the stress tensor in Equation (12) can be expressed as the sum of two
components, namely, the deviatoric stress and the mean stress, given by:
m
m
m
mzzyzx
yzmyyx
xzxymx
zzyzx
yzyyx
xzxyx
S
00
00
00
(13)
Deviatoric stress Mean stress
The mean stress and the deviatoric stress components are the key to
understanding the deformation mechanisms in UGMs. For instance, from repeated

Pavement Performance Modelling
15
triaxial tests performed on various UGMs, it is reported that the accumulation of
permanent strain in UGMs increases when the deviatoric stress increases and
decreases when the confining stress increases (Morgan, 1966; Barksdale, 1972;
Brown and Hyde, 1975).
Moreover, the state of stress at a single point in UGMs varies with the position
of the wheel, as shown in Figure 6, which leads to shear reversal or the rotation of
the principal planes (planes with zero shear stress). To investigate the effect of the
shear reversal on the permanent deformation behaviour of UGMs, Chan (1990)
conducted a hollow cylindrical test on crushed limestone and a higher permanent
strain was observed for load cases with shear reversal.
Figure 6. Stress condition in unbounded granular materials (Lekarp et. al., 1998).
In addition to the stress state, the permanent deformation behaviour of UGMs
is also affected by the stress history. This is due to the fact that the stiffness of the
material gradually increases due to the compaction effect of the repeated loading,
resulting in a reduction in permanent deformation for subsequent loadings. Brown
and Hyde (1975) reported that the permanent strain resulting from successive
increases in stress level is considerably smaller than the permanent strain that
occurs due to abrupt loading of higher stress.

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
16
Uzan (1985) has shown that the stiffness of UGMs increases as the
confinement level increases and has recommended a stress dependent resilient
stiffness. One of several forms of stress dependent stiffness is given by ARA
(2004):
32
13
1
k
a
oct
k
a
mar
pppkM
(14)
where Mr is the resilient stiffness; k1, k2, and k3 are material constants; pa = 100
kPa; m is the mean stress in kPa; oct =
√( ) ( ) ( )
is the octahedral shear stress in kPa and 1, 2 and 3 are the principal stresses in
kPa.
2.2.2. Load cycle
Pavement materials are subjected to repeated traffic loading with each passage
contributing to a small amount of unrecoverable strain. The permanent
deformation in UGMs is therefore a gradual accumulation of these contributions
through the service life of the pavement.
Several studies have indicated that the permanent deformation of UGMs is
highly influenced by the number of load repetitions (Morgan, 1966; Barksdale,
1972; Sweere, 1990). Paute et al. (1996) concluded that the rate of increase of
permanent strain in UGMs under repeated loading decreases constantly to such an
extent that it is possible to define a limit value for accumulation of permanent
strain. However, Lekarp (1997) and Lekarp and Dawson (1998) reported that
stabilization of the accumulation of permanent strain is attained only at a low
applied stress level, and at high stresses which are above some threshold value
known as the shakedown limit the material experiences a continuous incremental
permanent strain and eventually leads to failure. Kolisoja (1998) revealed that the
development of permanent deformation is complex and may not be expressed as a
simple function, as the materials that seem to be stable at some loading cycle may
indicate unpredictable behaviour under further loading.

Pavement Performance Modelling
17
2.2.3. Moisture content and physical properties
Moisture content in its optimum amount promotes better compaction of the
UGMs. However, the actual moisture content in UGMs in pavements varies from
time to time due to the ingress of water from the surroundings, depending on the
permeability of the material and the drainage conditions. Generally, an increase in
moisture content decreases the shear resistance or resistance to permanent
deformation (Barksdale, 1972; Thom and Brown, 1988; Lekarp et al., 2000a and
2000b; Erlingsson, 2010b).
Physical properties such as density, degree of compaction, fine contents,
grading, aggregate type and aggregate surface conditions also affect the
performance to rutting of UGMs. Several studies have indicated that as the
density increases the resistance to permanent deformation increases this is
particularly true for angular aggregates (Dunlap, 1966; Holubec, 1969; Thom and
Brown, 1988; Lekarp et al., 2000a and 2000b).
2.3. Modelling Permanent Deformation in UGMs
As discussed in the previous sections, permanent deformation in UGMs is
influenced by a number of factors and several attempts have been made to develop
analytical or M-E permanent strain predictive models for UGMs in pavements. A
detailed summary of the permanent strain prediction models for UGMs can be
found in Lekarp et al. (2000b) and SAMARIS (2004). The subsequent sections
present the commonly used and recently developed permanent strain models.
2.3.1. Regression-based permanent deformation models
Regression-based models for permanent deformation in UGMs relate the
pavement responses (stresses or strains) with the permanent strain in the UGM
layers using empirical equations. These models are usually some function of the
stress state, load cycles and material constants. This section presents the Tseng
and Lytton (1989), the Gidel et al. (2001) and the Korkiala-Tanttu (2005, 2008)
models. In these models, the permanent strain p is expressed as the product of
two functions as:
Nfgp , (15)

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
18
where g(, ) is some function of pavement responses (stresses or strains) and
f(N) is some function of load repetition N.
The Tseng and Lytton (1989) model, Equation (16), is a function of resilient
strain r and the number of load repetitions N. This model has been implemented
for estimating the permanent strain in base, subbase and subgrade layers in
MEPDG (ARA, 2004):
rN
p e
)(
01
(16)
in which 1 is the laboratory to field correlation factor; ε0, β and ρ are material
parameters.
The model by Gidel et al. (2001), Equation (17), was developed based on
repeated multistage triaxial tests conducted on UGMs and is a function of the
maximum deviatoric stress (qmax) and mean stress (pmax).
Bn
ap
N
N
p
q
p
sm
p
L
0
1
max
max
max
max01 1 (17)
where 1 is the laboratory to field correlation factor; N0 is the reference number of
load applications (N0 = 100); 2max
2maxmax qpL and pa = 100 kPa; n, B and 0
are
material constants; m = 6(sin/(3 - sin) and s = 6(c)(cos/(3 - sin), where
and c are the angle of internal friction and the cohesion of the material,
respectively; pmax = (1+23)/3, qmax = 1-3, 1, 2 and 3 are the principal
stresses.
In the Korkiala-Tanttu (2005) model, it is presumed that the permanent strain
in UGMs is directly proportional to the distance from the state of stress (stress
point) to the Mohr-Coulomb failure line expressed in deviatoric stress – mean
stress (q-p) space. The permanent strain is then expressed as a hyperbolic function
of the deviatoric stress ratio, Equation (18). This model accounts for the effect of
the number of load cycles through the log-log approach, as recommended by
Sweere (1990).
bp N
RA
RCN
1)( (18)

Pavement Performance Modelling
19
in which 1 is the laboratory to field correlation factor; C and b are material
constants; A is a parameter independent of the material (A = 1.05) and R is the
deviatoric stress ratio given by:
max
maxmax
mps
q
q
qR
f (19)
where m, s, qmax, pmax and s are as defined above.
2.3.2. Advanced models
The two most studied advanced group of models used for UGMs are the Elasto-
plastic and the Shakedown models. The elasto-plastic models apply the concept of
plasticity theory to model the cyclic behaviour of UGMs (Bonaquist et al., 1997;
Hornych et al., 1998; Desai, 2002).
The shakedown concept employs the fact that if progressive increase in plastic
strain (also known as ratcheting) under cyclic loading occurs then the structure
will eventually fail. The critical load level below which the structure shakes down
(or the plastic strain progressively stabilizes under cyclic loading) and above
which ratcheting is instigated is called the shakedown limit. This limiting value is
used for estimating the permanent strain in the UGMs (Hornych et al., 2007).
2.4. Performance of Asphalt Bound Materials
The three building blocks of asphalt bound materials (or asphalt mixtures) are
aggregate, binder, and air. In dense graded asphalt mixtures the aggregate
constitutes around 90% of the mixture volume. Asphalt mixtures are one of the
principal components of flexible pavement structure which are used to transfer the
heavy traffic loads from the surface to the underlying base and subbase layers and
provide a smooth ride when used as a surface layer.
One of the major distresses affecting the ride quality of asphalt pavements is
rutting. Rutting in asphalt layers occurs when the pavement under traffic loading
consolidates due to compaction. Rutting may also arise due to lateral movement
of the hot-mix asphalt (HMA) due to shear failure which generally occurs in the
upper portion of the pavement surface. The performance of asphalt mixtures to
rutting is affected by several factors which are presented in the following section.
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
20
2.4.1. Temperature and binder
The quantity and type of the binders are determinant factors of the performance of
an asphalt mixture. Generally a binder content higher than the optimum makes the
asphalt layer prone to rutting. On the other hand low binder content decreases
workability during construction and makes compaction of the HMA difficult,
which in turn leads to excessive air void, thus making the mix vulnerable to
rutting. Furthermore, at high pavement temperatures the asphalt binder becomes
less viscous. This in turn reduces the stiffness which leads to shear failure.
Some performance tests performed on asphalt mixtures indicated that asphalt
mixtures with modified binder might have better resistance to rutting and low
temperature susceptibility than unmodified mixtures (Corte et al., 1994; Tayfur et
al., 2007; Oscarsson, 2011).
2.4.2. Physical properties
Studies indicated that aggregate selections and gradations play a significant role in
the performance of asphalt mixtures. In addition, the shape and texture of the
aggregate also influence the performance of the mixture. In general, a rough-
textured cubical-shaped aggregate performs better than a smooth, rounded
aggregate as it produces a better aggregate interlock. This help decrease the
potential for rutting (Matthews and Monismith, 1992).
2.4.3. Other factors
Other factors influencing the performance of asphalt mixtures include traffic load
and axle configurations, truck speed, contact pressure and wheel wandering. It is
well known that slow moving trucks are more damaging due to the longer
duration of loading. Furthermore, truck loading and axle configurations are also
important factors. For instance, Corte et al. (1994) reported that axles with wide
single wheels, super single wheels, might be more aggressive than dual wheels
with respect to rutting resistance. Finally excessive wheel wander may also lead to
wider and perhaps deeper ruts in the asphalt layers (Donovan and Tutumluer,
2008).

Pavement Performance Modelling
21
2.5. Modelling Permanent Deformation in Asphalt Mixtures
Simple M-E analytical and advanced models have been developed in an effort to
predict rutting in asphalt mixtures which are discussed in the subsequent sections.
2.5.1. Regression-based models
One of the commonly used regression-based rut predictive models for asphalt
layers is the AASHTO model which was developed as a part of the M–E
Pavement Design Guide developed under the National Cooperative Highway
Research Program (NCHRP). Equation (20) presents the simplified version of the
model. This model is a function of pavement temperature, number of load cycles
and vertical elastic strain calculated using a response model (ARA, 2004).
r
aa
p NTaN 3211)( (20)
where p is the permanent strain; 1 is a calibration factor; T is the temperature; N
is the load repetitions; a1, a2 and a3 are the regression constants and r is the
vertical elastic strain calculated using a response model.
Other models include the shear based incremental-recursive CalME model
which is employed in the M-E design program by the California Department of
Transportation (Ullidtz et al., 2006) and the PEDRO model which was developed
based on viscoelastic densification and flow (Said et al., 2011). Oscarsson (2011)
evaluated the MEPDG, CalME and PEDRO models based on permanent
deformation measurements from test pavement structures.
2.5.2. Advanced models
Advanced models for predicting permanent deformation in asphalt mixtures
consider the viscous nature of asphalt mixtures through viscoelastic or
viscoelastoplastic constitutive equations. Both linear and nonlinear viscoelasticity
approaches have been examined. One such example is the linear viscoelastic
model employed in the viscoelastic multilayer computer program VEROAD,
viscoelastic road analysis Delft, (Hopman, 1996). However, being
computationally expensive the nonlinear viscoelasticity has gained little usage
(Collop et al., 1995).
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
22
Collop et al. (1995) used VESYS to predict rutting in asphalt concrete and they
reported that there was a good agreement between the measured and the predicted
rutting except at the initial stage of the loading. This was attributed to the fact that
the initial stage rutting is a result of densification which the theory of
viscoelasticity is unable to take into account. Furthermore, research from Shell
indicated that utilizing viscoelastic properties of asphalt is not sufficient due to the
fact that the influence of the aggregate and its interaction with the asphalt is not
included in viscoelastic modelling (Lijzenga, 1997; Long, 2001).
Viscoelastoplastic models, on the other hand, take into account the influence of
aggregate and asphalt-aggregate interaction through elastoplastic components.
2.6. Characterization of Traffic
Traffic is one of the major factors affecting the performance of flexible pavements
and it is certainly one of the important parameters in pavement design procedures.
In the empirical pavement design procedure which was developed based on the
1950’s AASHTO road test, the mixed traffic is converted into the number of an
Equivalent Standard Axle Loads (ESAL) of usually 80kN (US) and 100 kN
(Europe). The conversion is made based on empirical relations developed from
the AASHTO road test. The conversion of mixed traffic into ESALs depends on
several factors such as the pavement type and the distress type under
consideration.
As pavement design procedures advance toward a more mechanistic approach,
the use of a more detailed traffic count and characterization is inevitable. The
subsequent sections present the common traffic counting method and its
characterizations.
2.6.1. Weigh-in-motion instruments
Weigh-in-motion (WIM) instruments are installations or attachments on or under
the pavement which are used to record the daily, weekly, seasonal and yearly
variations of traffic data while the vehicle is in motion (Cebon and Winkler, 1991;
Bouteldja et al., 2008).

Pavement Performance Modelling
23
The bridge weigh-in-motion (BWIM) system, first introduced by Moses
(1979), is a WIM system mounted on a concrete bridge. The system consists of
extensometers (strain gauges) and a data logger. Strain gauges and extensometers
attached to the bottom surface of the bridge slab are used to measure and detect
traffic information such as vehicle speed, axle load and configurations, and time.
The various recordings are stored in the data logger. It is essential to note that,
even though BWIM or WIM instruments provide detailed information regarding
traffic characteristics, these instruments do not record other important parameters
such as traffic wander pattern, wheel configurations (i.e. single or dual), and
contact pressure which are also important for pavement design procedures.
The axle loads and configurations from WIM instruments are usually presented
in the form of the axle load spectra (ALS) or frequency distribution of the axle
load groups of a given axle configuration (steering, single, tandem, tridem or quad
axle). Therefore raw WIM or BWIM data must be analysed to produce the ALS.
The analysis of the BWIM data is carried out in two steps; first the data from each
axle configuration are grouped into different axle load intervals (load groups). The
axle loads may be grouped using a desired load interval or bin width. In MEPDG,
for instance, 4.4 kN (1000 lb) for single axle, 8.9 kN (2000 lb) for tandem axle
and 13.3 kN (3000 lb) for tridem and quad axle are used (APA, 2004). The
frequency distributions for the load groups are then determined in order to
produce the ALS.
Few studies have been carried out to characterize the statistics of ALS and their
contribution to the pavement deterioration process. Based on the ALS data from
the USA, Haider and Harichandran (2009) concluded that fatigue damage is
related to the heavy load wings of the ALS while the rutting behaviour is
primarily the result of the number of load applications. Similarly, Prozzi and
Hong (2006) has shown that the ALS of a given project site can be represented by
a mixed lognormal distribution function and it is reported that the performance of
the pavement can be predicted by the statistical characteristics of the ALS
distribution functions.
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
24
2.6.2. Characterization of heavy traffic in a Swedish road network
In 2004, the Swedish Road Administration established a national BWIM network.
The BWIM network consists of motorways, arterials or trunk roads as well as one
county road and measurements were made during one week every year between
2004 and 2008 (Erlingsson, 2010a; Erlingsson et al., 2010; Winnerholt and
Persson, 2010). Erlingsson et al. (2010) analysed the BWIM data to generate ALS
of national BWIM sites and studied their characteristics. A time series analysis of
these stations for the time period between 2004 and 2008 was also carried out to
investigate how the ALS changes over time and to estimate the annual growth
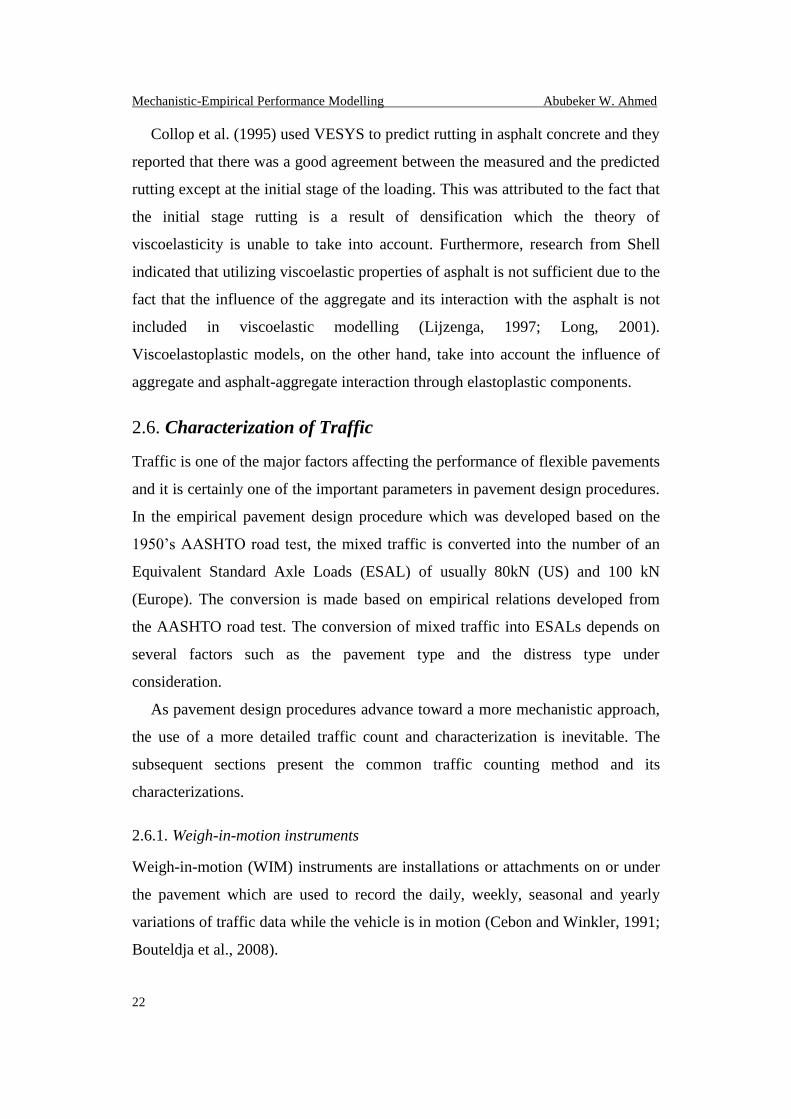
rate. Figure 7 shows the ALS for a national BWIM site at Mjölby, South of
Stockholm.
Figure 7. ALS of the national BWIM site at Mjölby for the period 2004 – 2008 for
a) Steering axles, b) Single axles, c) Tandem axles and d) Tridem axles
(Erlingsson, 2010a).
From Figure 7 it can be observed that the distribution of steering axles was
fairly normally distributed; this might be attributed to the fact that steering axles
are single wheel and the load carried by steering axles, the front compartment of
the trucks, is fairly uniform from truck to truck while the load transferred to other
axle configurations varies depending on the loading conditions.
0
0
0
1
1
1
1
0 0.2 0.4 0.6 0.8 1 1.2
0
10
20
30
40
0 50 100 150Axle Weights [kN]
Fre
quency [
%]
20042005200620072008Mean
a)
0
5
10
15
0 50 100 150 200Axle Weights [kN]
Fre
quency [
%]
20042005200620072008Mean
b)
0
2
4
6
8
10
0 50 100 150 200 250 300
Axle Weights [kN]
Fre
quency [
%]
20042005200620072008Mean
c)
0
2
4
6
8
10
0 50 100 150 200 250 300 350
Axle Weights [kN]
Fre
quency [
%]
20042005200620072008Mean
d)
Pavement Performance Modelling
25
2.6.3. Characterization of heavy traffic ALS for M-E applications
As mentioned in the preceding sections, traffic is one of the key factors
influencing the performance of flexible pavements and it is one of the main input
parameters for pavement design procedures. Various design procedures adopt
different characterizations of the traffic. Most M-E procedures characterize the
entire heavy traffic ALS by converting into an equivalent number of standard
axles ESALs; thus this standard axle is used for analysis and design of the
pavement. This characterization is generally computationally efficient as the
analysis of the pavement is performed only for the chosen standard axle. On the
other hand, in more comprehensive M-E design procedures such as MEPDG, the
entire ALS is used to analyse the pavement. However, these procedures are
computationally expensive. Thus, to improve the computational performance, in
MEPDG the ALS is characterized by a constant contact area (CCA); in this way,
as indicated in Equation (7), response analysis for only one set of axle load-
contact pressure combinations is performed. The responses for other axle loads in
the ALS are estimated from the linear relation between contact pressure and the
response. As reported by Morton et al. (2004), a relatively more accurate
characterization for the ALS is to assume a constant contact pressure (CCP) for
the entire traffic. However, this characterization requires the analysis of the
pavement structure for the entire axle loads in the ALS and therefore
computationally inefficient for practical applications.
2.6.4. Heavy traffic lateral wander
Pavements are subjected to wandering traffic loads that do not follow a straight
course or channelized traffic. Several studies have shown that traffic wandering
has a significant effect on the development of rutting (Blab and Litzka, 1995; Wu
and Harvey, 2008). It is therefore necessary to take the effect of a wandering
pattern into account both during testing and modelling of the permanent
deformation behaviour of the pavement structures. Studies based on field
measurements have indicated that the lateral wander pattern can be modelled as
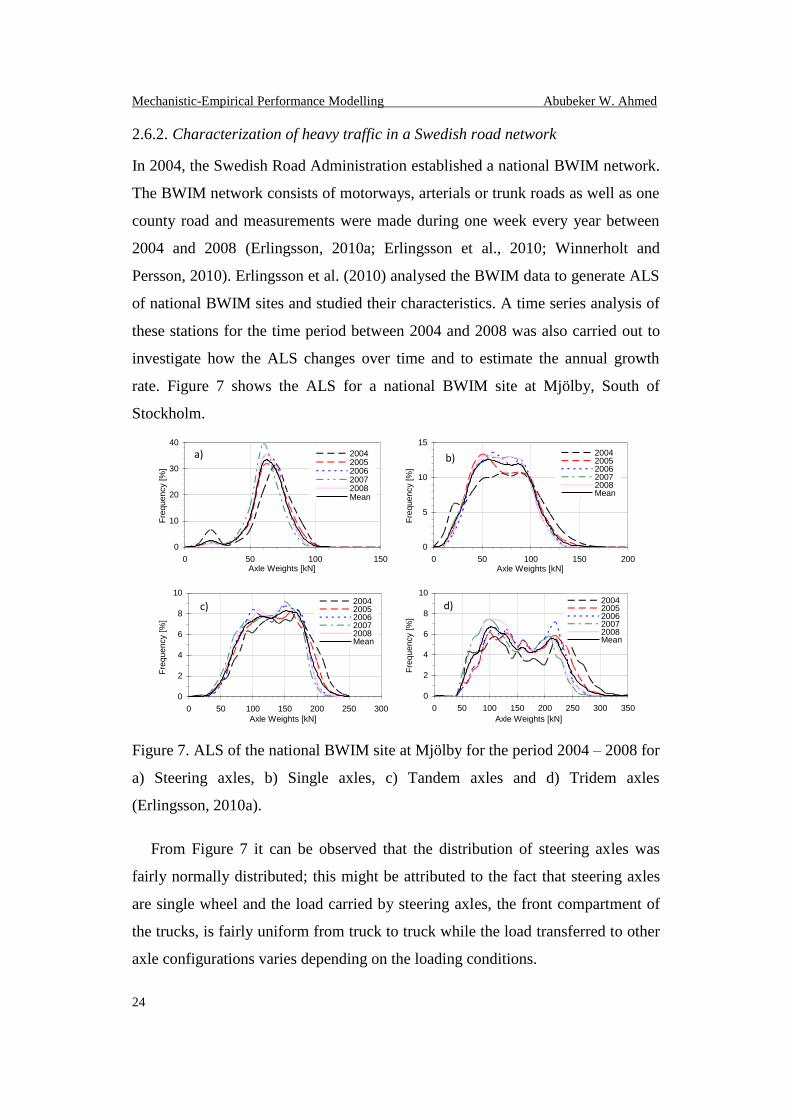
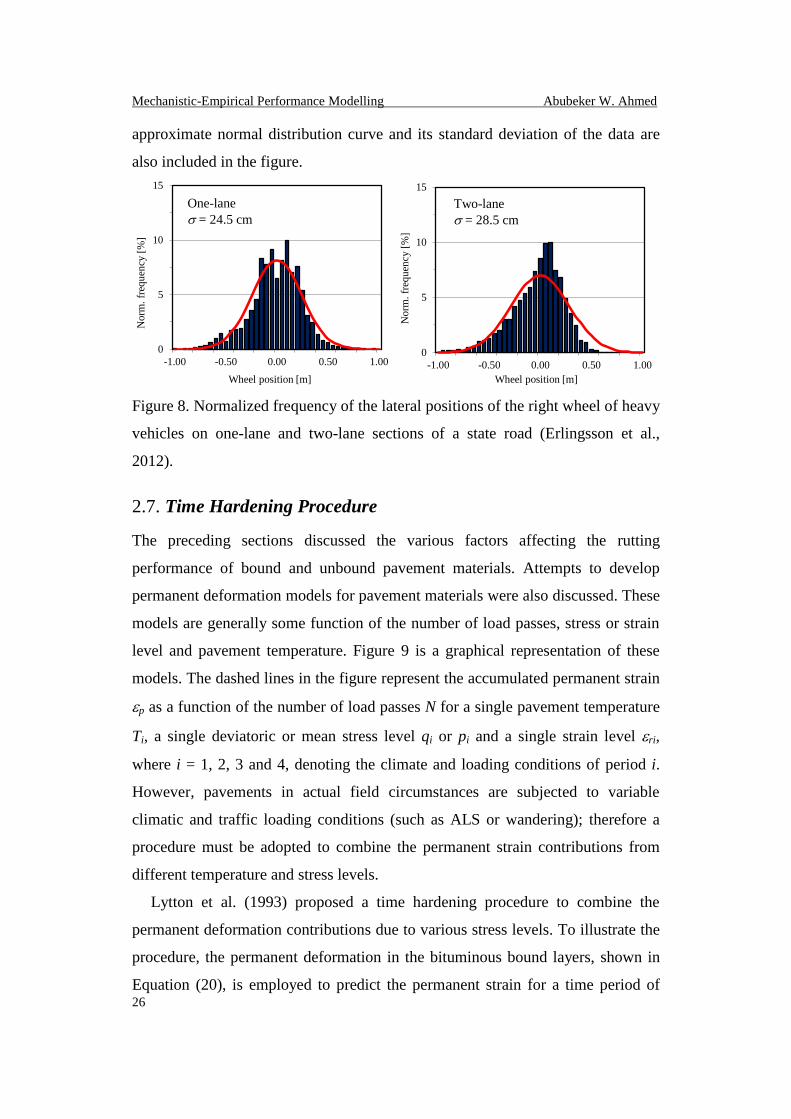
normally distributed (Erlingsson et al., 2012). Figure 8 shows the measured lateral
wander distributions of one-lane and two-lane sections of a state road. The
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
26
approximate normal distribution curve and its standard deviation of the data are
also included in the figure.
Figure 8. Normalized frequency of the lateral positions of the right wheel of heavy
vehicles on one-lane and two-lane sections of a state road (Erlingsson et al.,
2012).
2.7. Time Hardening Procedure
The preceding sections discussed the various factors affecting the rutting
performance of bound and unbound pavement materials. Attempts to develop
permanent deformation models for pavement materials were also discussed. These
models are generally some function of the number of load passes, stress or strain
level and pavement temperature. Figure 9 is a graphical representation of these
models. The dashed lines in the figure represent the accumulated permanent strain
p as a function of the number of load passes N for a single pavement temperature
Ti, a single deviatoric or mean stress level qi or pi and a single strain level ri,
where i = 1, 2, 3 and 4, denoting the climate and loading conditions of period i.
However, pavements in actual field circumstances are subjected to variable
climatic and traffic loading conditions (such as ALS or wandering); therefore a
procedure must be adopted to combine the permanent strain contributions from
different temperature and stress levels.
Lytton et al. (1993) proposed a time hardening procedure to combine the
permanent deformation contributions due to various stress levels. To illustrate the
procedure, the permanent deformation in the bituminous bound layers, shown in
Equation (20), is employed to predict the permanent strain for a time period of
0
5
10
15
-1.00 -0.50 0.00 0.50 1.00
Norm
. fr
equ
ency
[%
]
Wheel position [m]
One-lane
= 24.5 cm
0
5
10
15
-1.00 -0.50 0.00 0.50 1.00
Norm
. fr
equ
ency
[%
]
Wheel position [m]
Two-lane
= 28.5 cm

Pavement Performance Modelling
27
four seasons. It is assumed that each season is characterized by a pavement
temperature Ti, a deviatoric or mean stress level qi or pi and a strain level ri where
i = 1, 2, 3 and 4. The process begins by calculating the permanent strain p1 at the
end of the first season, using the temperature T1 and strain r1, and is given by:
(21)
Then the equivalent number of passes Neq1 that would yield the same
permanent strain p1 in the second season (or dashed line 2 in Figure 9) is
calculated from:
(
)
⁄
(22)
Figure 9. The time hardening procedure.
Finally, the permanent strain contribution due to the climate and loading
conditions of the second season is calculated from:
(23a)
(
) (23b)
where N is the number of applied load repetitions during the second season. The
total permanent strain at the end of the second season is obtained from:
(24)
The above procedures are repeated until the end of the seasons is reached.
Neq1 Neq2 Ni5 Ni2
T1, q1, p1, εr1
T2, q2, p2, εr2
T3, q3, p3, εr3
T4, q4, p4, εr4 εp
N
1
2
3
4
Ni1

Test Equipment, Structures and Materials
29
3. Test Equipment, Structures and Materials
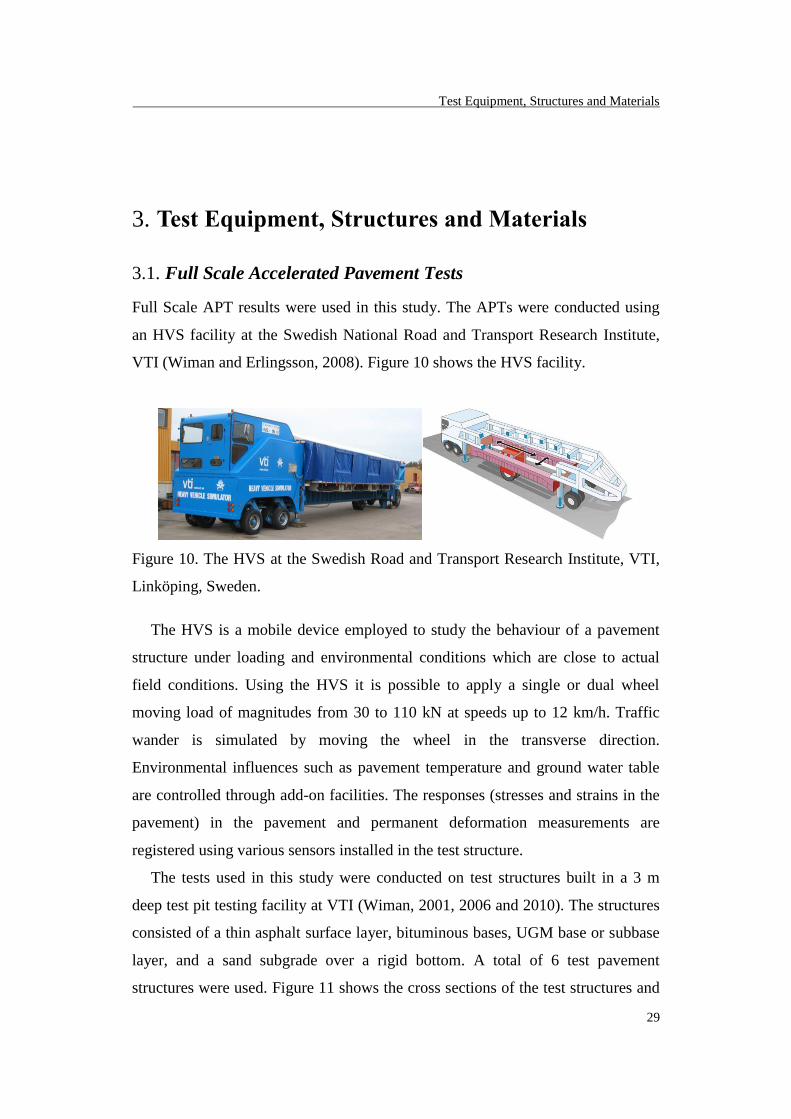
3.1. Full Scale Accelerated Pavement Tests
Full Scale APT results were used in this study. The APTs were conducted using
an HVS facility at the Swedish National Road and Transport Research Institute,
VTI (Wiman and Erlingsson, 2008). Figure 10 shows the HVS facility.
Figure 10. The HVS at the Swedish Road and Transport Research Institute, VTI,
Linköping, Sweden.
The HVS is a mobile device employed to study the behaviour of a pavement
structure under loading and environmental conditions which are close to actual
field conditions. Using the HVS it is possible to apply a single or dual wheel
moving load of magnitudes from 30 to 110 kN at speeds up to 12 km/h. Traffic
wander is simulated by moving the wheel in the transverse direction.
Environmental influences such as pavement temperature and ground water table
are controlled through add-on facilities. The responses (stresses and strains in the
pavement) in the pavement and permanent deformation measurements are
registered using various sensors installed in the test structure.
The tests used in this study were conducted on test structures built in a 3 m
deep test pit testing facility at VTI (Wiman, 2001, 2006 and 2010). The structures
consisted of a thin asphalt surface layer, bituminous bases, UGM base or subbase
layer, and a sand subgrade over a rigid bottom. A total of 6 test pavement
structures were used. Figure 11 shows the cross sections of the test structures and

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
30
their instrumentations.
Figure 11. Cross sections of the test structures and instrumentations.
The test structures, referred to as SE01, SE05-1, SE05-2 and SE06 in Figure
11, were used for evaluation and validation of responses and permanent
deformation models for UGMs (Paper II and Paper III) whereas permanent
SE01
0
49
138
z [mm]
Crushed aggregate base
Asphalt concrete surface
Natural till mixed with
crushed rock base
Natural gravel
Sand subgrade
SE05-1
Pressure cell (vertical stresses)
Transversal asphalt strain gauge
Longitudinal asphalt strain gauge
Inductive coils (vertical strain)
SE05-2 0
55
506
z [mm]
0
50
512
z [mm]
Deflection gauge
48
209
101
z [mm]
351
0
SE06
Bituminous base
Granular subbase
SE09
0
35
396
z [mm]
33
192
110
z [mm]
644
0
SE10
Bituminous binder
117
198

Test Equipment, Structures and Materials
31
deformation models and viscoelastic responses of bituminous layers were
evaluated using test structures SE09 and SE10, respectively (Paper V and Paper
VI).
The material properties for the different layers in the test structures were
established based on laboratory tests and/or back-calculated from falling weight
deflectometer (FWD) measurements performed on the test structures.
3.2. Extra-Large Wheel Tracking Tests
The other device employed in this study was the extra-large wheel tracking
(ELWT) apparatus at The Swedish Road and Transport Research Institute (VTI),
Linköping, Sweden. In the ETWT test, an asphalt slab specimen of size 50 cm x
70 cm x 4-12 cm is subjected to a moving single wheel load of a magnitude up to
25 kN at a speed of up to 5 km/h in either direction. The load is applied through a
small truck tyre. The load is applied for a specified number of passes. Traffic
wandering is simulated by displacing the wheel at 7 offset positions over a width
of 6 cm.
The permanent deformation on the asphalt slab is measured using a laser beam
mounted on the device. The rut measuring is carried out at five transverse profiles
along the length of the plate. The distance measurement is made at an accuracy of
0.01 mm and a maximum number of 700 measurement points per profile. The
measurement points are spaced at 0.7 mm.
Specimen and air temperature in the test chamber are continuously controlled.
The temperature in the chamber can be varied between +5 and +60 °C. The
chamber temperature is controlled so that the temperature of the specimen is
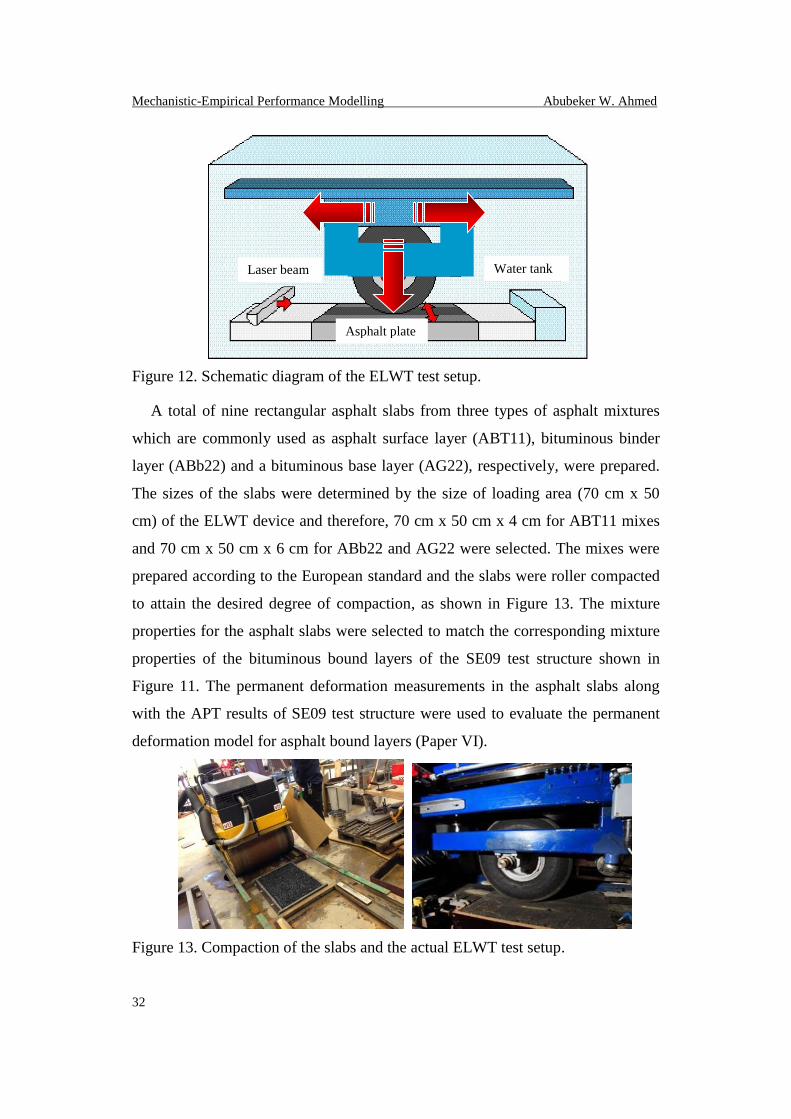
maintained at a constant level. Figure 12 demonstrates the schematics of the
device.
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
32
Figure 12. Schematic diagram of the ELWT test setup.
A total of nine rectangular asphalt slabs from three types of asphalt mixtures
which are commonly used as asphalt surface layer (ABT11), bituminous binder
layer (ABb22) and a bituminous base layer (AG22), respectively, were prepared.
The sizes of the slabs were determined by the size of loading area (70 cm x 50
cm) of the ELWT device and therefore, 70 cm x 50 cm x 4 cm for ABT11 mixes
and 70 cm x 50 cm x 6 cm for ABb22 and AG22 were selected. The mixes were
prepared according to the European standard and the slabs were roller compacted
to attain the desired degree of compaction, as shown in Figure 13. The mixture
properties for the asphalt slabs were selected to match the corresponding mixture
properties of the bituminous bound layers of the SE09 test structure shown in
Figure 11. The permanent deformation measurements in the asphalt slabs along
with the APT results of SE09 test structure were used to evaluate the permanent
deformation model for asphalt bound layers (Paper VI).
Figure 13. Compaction of the slabs and the actual ELWT test setup.
Figur 1 Skiss över VTI:s Wheel Tracking utrustning
Laser beam Water tank
Asphalt plate

Response Models for Flexible Pavements
33
4. Response Models for Flexible Pavements
As discussed in the preceding sections, the response model plays an important
role in M-E pavement design and performance prediction procedures. The
response model is used to estimate the stresses, strains and displacements in the
pavement structure subjected to existing traffic loading, taking into account the
material properties and prevailing environmental conditions.
4.1. Multi-Layer Elastic Theory
Paper I appended to this thesis documents the development of a layered elastic
program based on Burmister theory. As is explained in the paper, a considerable
effort was made to improve the computational performance of the MLET program
by computing the integration constants shown in Equation (6) at selected Hankel
parameters and using piecewise linear interpolation to estimate the coefficients for
other values of the Hankel parameters. This procedure considerably decreased the
number of matrix inversions required. In addition, Richardson’s extrapolation was
employed to improve the convergence and accuracy of the integral for near
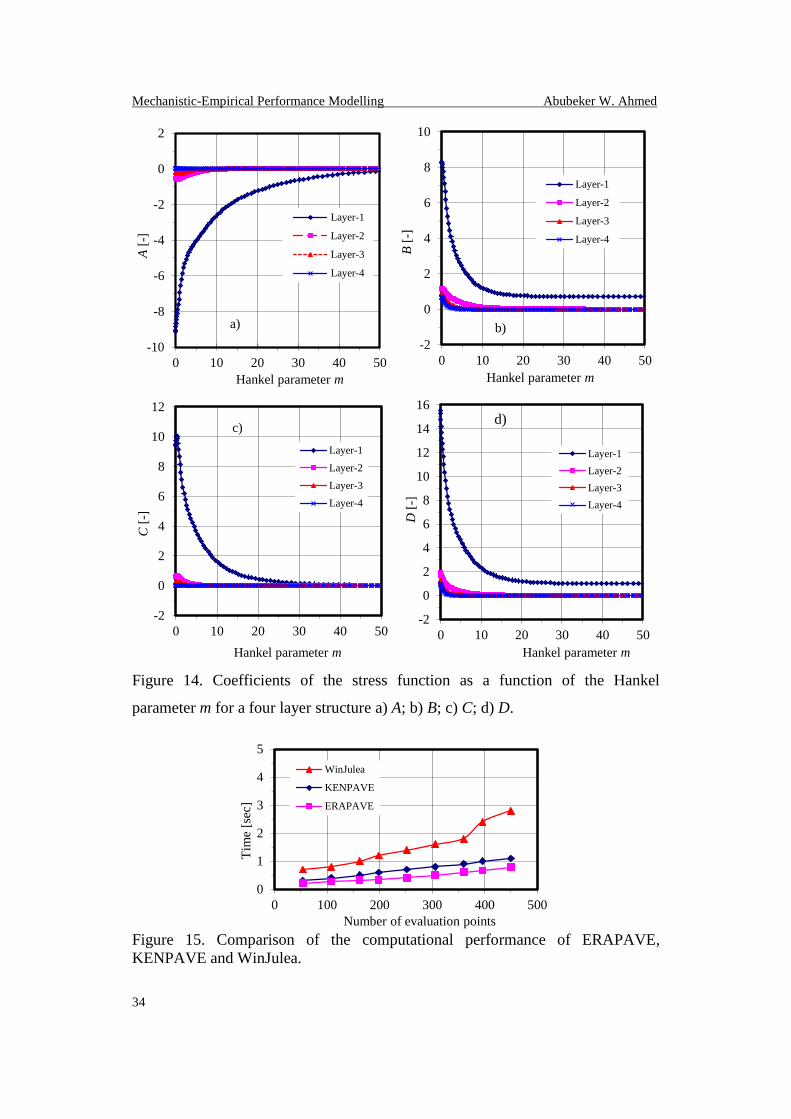
surface responses. Figure 14 depicts the stress coefficients (A, B, C and D), shown
in Equation (6), for a typical four layer pavement structure. As can be observed
from the figures, the coefficients increase or decrease continuously, like
monotonic functions, thus interpolation or extrapolation of the coefficients is
valid. The procedure is implemented in an MLET program ERAPAVE (Elastic
Response Analysis of flexible PAVEments).
A comprehensive verification of the program using two frequently used layered
elastic programs, KENPAVE (Huang, 2004) and WinJulea (ARA, 2004), was
performed and the accuracy obtained was excellent. The comparison of the
computational performance of the three programs also revealed that the
ERAPAVE program has an improved computational performance, especially for a
larger number of evaluation points, as shown in Figure 15.
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
34
Figure 14. Coefficients of the stress function as a function of the Hankel
parameter m for a four layer structure a) A; b) B; c) C; d) D.
Figure 15. Comparison of the computational performance of ERAPAVE,
KENPAVE and WinJulea.
-10
-8
-6
-4
-2
0
2
0 10 20 30 40 50
A [
-]
Hankel parameter m
Layer-1
Layer-2
Layer-3
Layer-4
a)
-2
0
2
4
6
8
10
0 10 20 30 40 50
B [
-]
Hankel parameter m
Layer-1
Layer-2
Layer-3
Layer-4
b)
-2
0
2
4
6
8
10
12
0 10 20 30 40 50
C [
-]
Hankel parameter m
Layer-1
Layer-2
Layer-3
Layer-4
c)
-2
0
2
4
6
8
10
12
14
16
0 10 20 30 40 50
D [
-]
Hankel parameter m
Layer-1
Layer-2
Layer-3
Layer-4
d)
0
1
2
3
4
5
0 100 200 300 400 500
Tim
e [s
ec]
Number of evaluation points
WinJulea
KENPAVE
ERAPAVE

Response Models for Flexible Pavements
35
Moreover, a nonlinear module was also introduced to take the stress dependent
behaviour of unbound materials into account. The superposition principle was
used to handle multiple wheel loading. The comparison of the nonlinear responses
from ERAPAVE with KENPAVE revealed good agreement between the two
programs.
The program was also used to simulate the measured responses of a test
structure from a full scale APT conducted at several wheel loadings and pavement
temperatures (Paper III). Figure 16 presents the measured and calculated vertical
strain for dual wheel (DW) loads of 50, 60 and 80 kN at a tyre pressures of 500
kPa, 800 kPa and 900 kPa, respectively, and a pavement temperature of 10C.
Figure 16. Measured and computed vertical strain for SE06 test structure under
wheel loads of a) 50, b) 60 and c) 80 kN.
0
10
20
30
40
50
60
70
-1.0 0.0 1.0 2.0 3.0
Dep
th [
cm]
Strain εz [10-3]
DW-50kN/500kPa-measured
DW-50kN/500kPa-computed
T = 10 ºC
a)
0
10
20
30
40
50
60
70
-1.0 0.0 1.0 2.0 3.0D
epth
[cm
] Strain εz [10-3]
DW-60kN/800kPa-measured
DW-60kN/800kPa-computed
T = 10 ºC
b)
0
10
20
30
40
50
60
70
-1.0 1.0 3.0 5.0
Dep
th [c
m]
Strain εz [10-3]
DW-80kN/900kPa-measured
DW-80kN/900kPa-computed
T = 10 ºC
c)

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
36
Figure 17 presents the measured and calculated vertical stress for a single
wheel (SW) load of 60 kN and at tyre pressures of 500 kPa and 900 kPa,
respectively, at a pavement temperature of 10C.
Figure 17. Vertical stress for SE06 test structure under single wheel loading at
different radial locations at 17 cm depth from the surface for (a) 500 kPa and (b)
900 kPa tyre pressure and pavement temperature of 10ºC.
4.2. Linear Viscoelastic Theory
The ERAPAVE program was extended for analysis of a layered system consisting
of linear viscoelastic materials. Paper V appended to this thesis demonstrated the
application of a generalized layered LVE analysis for estimating the structural
response of flexible pavements. The procedure is based on the elastic-viscoelastic
correspondence principle using a numerical inverse Laplace transform by Abate
and Valko (2004). A comparison of the direct layered LVE responses with
approximate solutions based on the elastic collocation (LE Collocation) method
was also carried out. Furthermore, this study proposed and demonstrated the use
of a collocation method based on LVE solutions at selected time durations (or
LVE Collocation) in order to improve the accuracy of the elastic collocation
method. Figures 18 and 19 present the comparison of these approaches for a
typical four layered pavement structure subjected to a stationary load of 60 kN
(Paper V). The figures also included the LVE response from KENLAYER.
0
25
50
75
100
125
150
175
200
-40 -20 0 20 40
Str
ess
σz
[kP
a]
SW-60kN/500kPa-measured
SW-60kN/500kPa-computed
a)
Distance from centre of tyre [cm]
0
25
50
75
100
125
150
175
200
-40 -20 0 20 40
Str
ess
σz
[kP
a]
SW-60kN/900kPa - measured
SW-60kN/900kPa - computed
b)
Distance from centre of tyre [cm]

Response Models for Flexible Pavements
37
Maximum errors of 8% in tensile stress and 3% tensile strain at the bottom of the
asphalt layer were observed in the LVE collocation method. The corresponding
values for the LE collocation approximation were 14% for tensile stress and 5%
for tensile strain, respectively.
Figure 18. a) Tensile stress and b) tensile strain at the bottom of the asphalt layer
under the centre of the wheel.
The proposed LVE collocation method was extended for analyses of moving
loads. The HVS test pavement structure SE10, shown in Figure 11, was also
analysed to simulate the measured responses under a moving load of varying
magnitude. Figures 20a to 20d show the measured and computed longitudinal and
transversal strains at the bottom of the bituminous base layer for moving wheel
loads of 30, 50, 60 and 80 kN at tyre pressure of 800 kPa and a pavement
temperature of 20C. The LVE calculations in general agreed very well with the
response measurements.
Figure 19. a) Vertical stress and b) vertical strain at the top of the subgrade under
the centre of the wheel.
-2500
-2000
-1500
-1000
-500
0
0 2 4 6 8 10
Ten
sile
str
ess
x [
kP
a]
Time [sec]
LVE
LVE Collocation
LE Collocation
KENLAYER
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0 2 4 6 8 10
Ten
sile
str
ain
x
[1
0-3
]
Time [sec]
LVE
LVE Collocation
LE Collocation
KENLAYER
b)
0
20
40
60
80
0 2 4 6 8 10
Ver
tica
l st
ress
z
[k
Pa]
Time [sec]
LVE
LVE Collocation
LE Collocation
KENLAYERa)
0
0.2
0.4
0.6
0.8
1
0 2 4 6 8 10
Ver
tica
l st
rain
z [
10
-3]
Time [sec]
LVE
LVE Collocation
LE Collocation
KENLAYERb)
a)
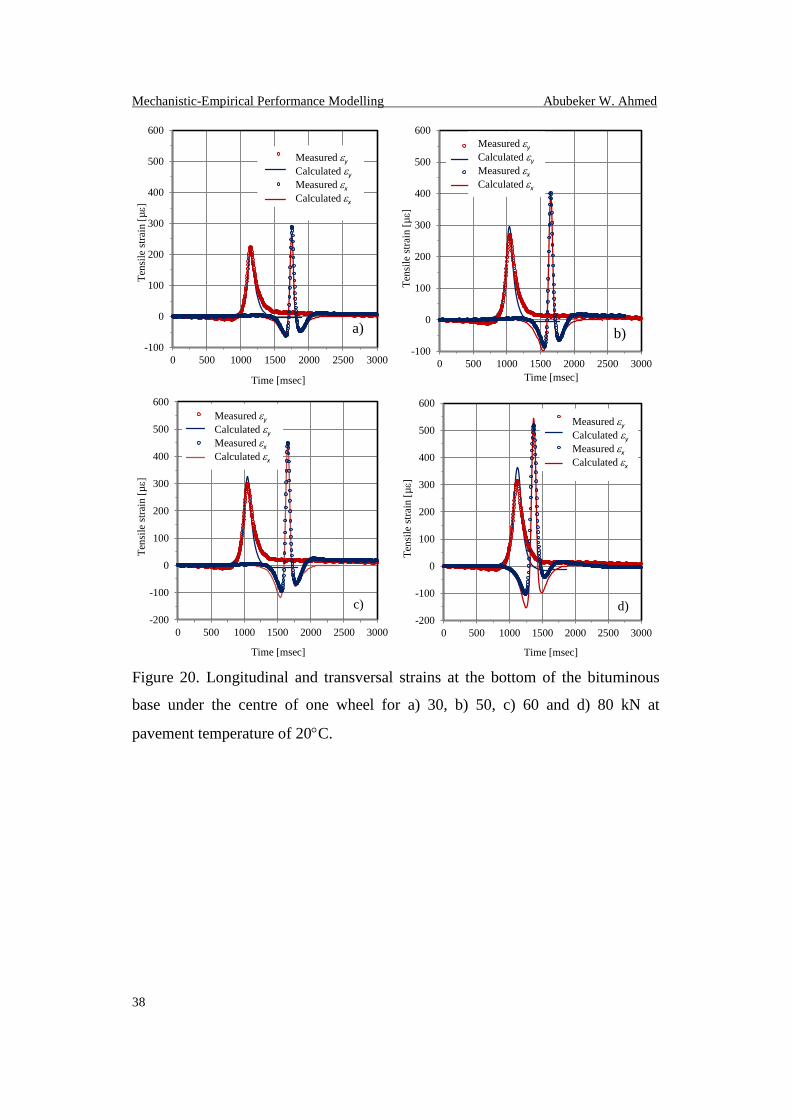
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
38
Figure 20. Longitudinal and transversal strains at the bottom of the bituminous
base under the centre of one wheel for a) 30, b) 50, c) 60 and d) 80 kN at
pavement temperature of 20C.
-100
0
100
200
300
400
500
600
0 500 1000 1500 2000 2500 3000
Ten
sile
str
ain
[µ]
Time [msec]
Measured ey
Calculated ey
Measured ex
Calculated ex
Measured y
Calculated y
Measured x
Calculated x
a)
-100
0
100
200
300
400
500
600
0 500 1000 1500 2000 2500 3000
Ten
sile
str
ain
[µ]
Time [msec]
Measured ey
Calculated ey
Measured ex
Calculated ex
Measured y
Calculated y
Measured x
Calculated x
b)
-200
-100
0
100
200
300
400
500
600
0 500 1000 1500 2000 2500 3000
Ten
sile
str
ain
[µ]
Time [msec]
Measured ey
Calculated ey
Measured ex
Calculated ex
Measured y
Calculated y
Measured x
Calculated x
c)
-200
-100
0
100
200
300
400
500
600
0 500 1000 1500 2000 2500 3000
Ten
sile
str
ain
[µ]
Time [msec]
Measured ey
Calculated ey
Measured ex
Calculated ex
Measured y
Calculated y
Measured x
Calculated x
d)
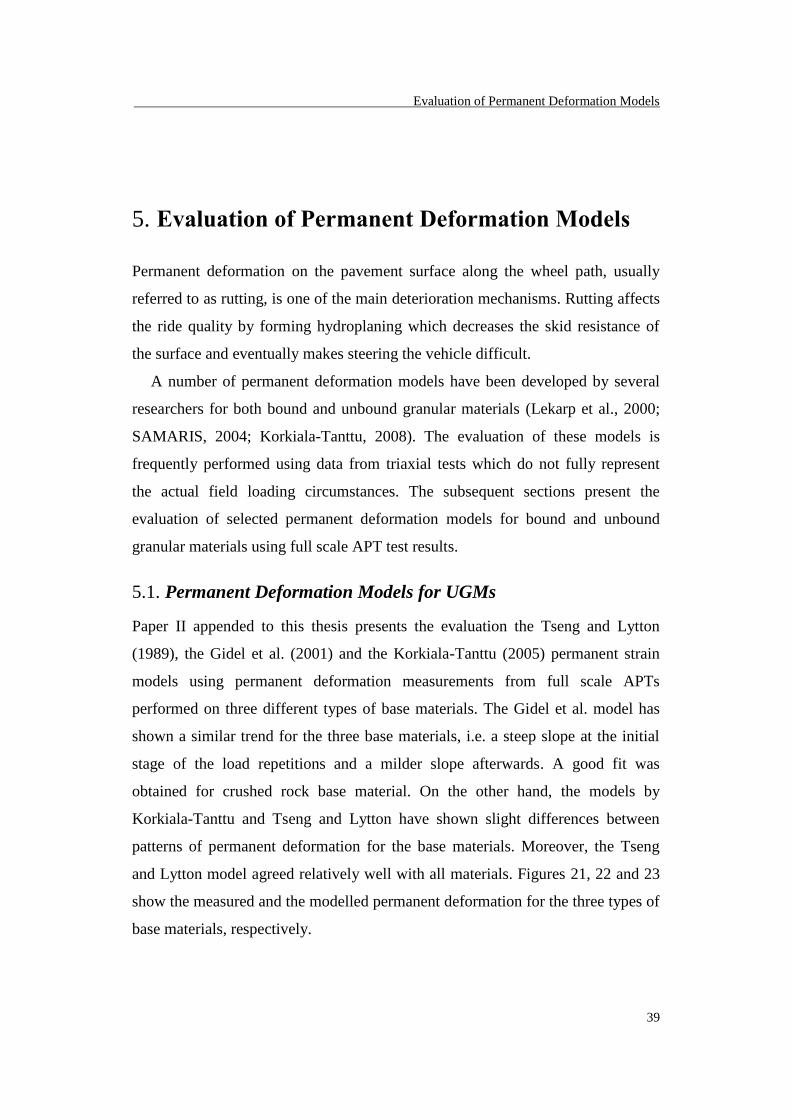
Evaluation of Permanent Deformation Models
39
5. Evaluation of Permanent Deformation Models
Permanent deformation on the pavement surface along the wheel path, usually
referred to as rutting, is one of the main deterioration mechanisms. Rutting affects
the ride quality by forming hydroplaning which decreases the skid resistance of
the surface and eventually makes steering the vehicle difficult.
A number of permanent deformation models have been developed by several
researchers for both bound and unbound granular materials (Lekarp et al., 2000;
SAMARIS, 2004; Korkiala-Tanttu, 2008). The evaluation of these models is
frequently performed using data from triaxial tests which do not fully represent
the actual field loading circumstances. The subsequent sections present the
evaluation of selected permanent deformation models for bound and unbound
granular materials using full scale APT test results.
5.1. Permanent Deformation Models for UGMs
Paper II appended to this thesis presents the evaluation the Tseng and Lytton
(1989), the Gidel et al. (2001) and the Korkiala-Tanttu (2005) permanent strain
models using permanent deformation measurements from full scale APTs
performed on three different types of base materials. The Gidel et al. model has
shown a similar trend for the three base materials, i.e. a steep slope at the initial
stage of the load repetitions and a milder slope afterwards. A good fit was
obtained for crushed rock base material. On the other hand, the models by
Korkiala-Tanttu and Tseng and Lytton have shown slight differences between
patterns of permanent deformation for the base materials. Moreover, the Tseng
and Lytton model agreed relatively well with all materials. Figures 21, 22 and 23
show the measured and the modelled permanent deformation for the three types of
base materials, respectively.
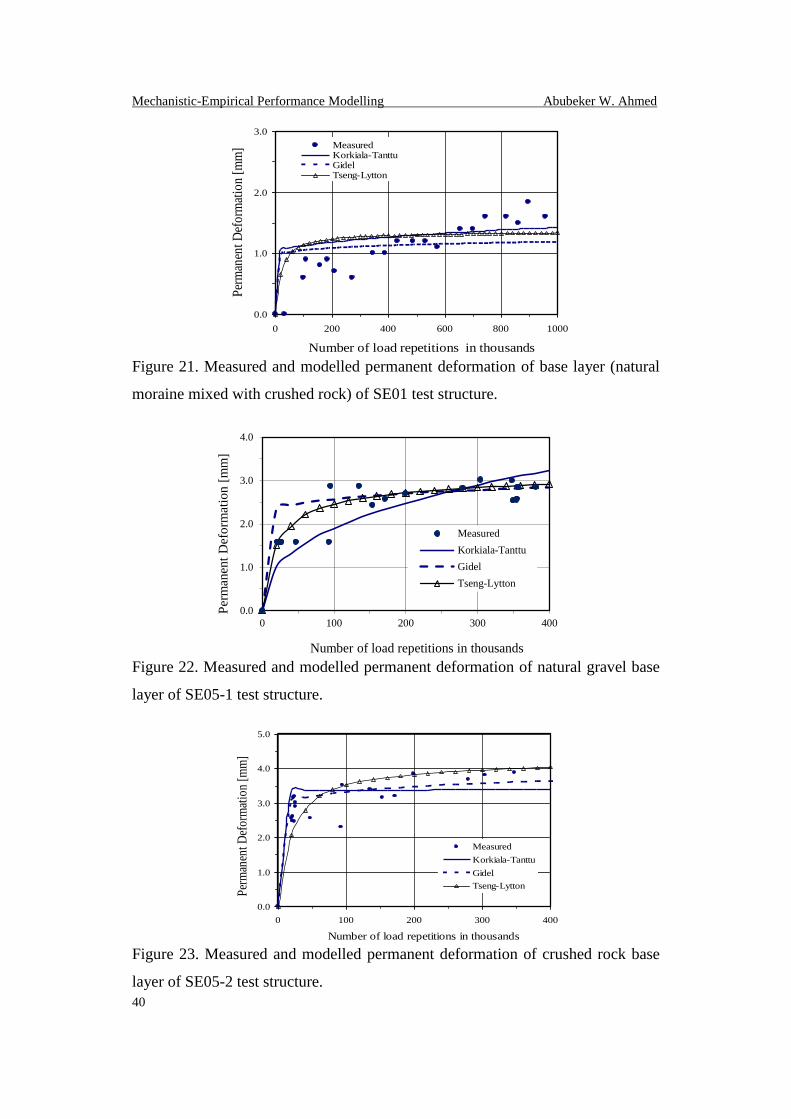
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
40
Figure 21. Measured and modelled permanent deformation of base layer (natural
moraine mixed with crushed rock) of SE01 test structure.
Figure 22. Measured and modelled permanent deformation of natural gravel base
layer of SE05-1 test structure.
Figure 23. Measured and modelled permanent deformation of crushed rock base
layer of SE05-2 test structure.
0.0
1.0
2.0
3.0
0 200 400 600 800 1000
Number of load repetitions in thousands
Per
man
ent
Def
orm
atio
n [
mm
] MeasuredKorkiala-TanttuGidelTseng-Lytton
0.0
1.0
2.0
3.0
4.0
0 100 200 300 400
Per
man
ent
Def
orm
atio
n [
mm
]
Number of load repetitions in thousands
Measured
Korkiala-Tanttu
Gidel
Tseng-Lytton
0.0
1.0
2.0
3.0
4.0
5.0
0 100 200 300 400
Number of load repetitions in thousands
Per
man
ent D
efor
mat
ion
[mm
]
Measured
Korkiala-Tanttu
Gidel
Tseng-Lytton

Evaluation of Permanent Deformation Models
41
Laboratory to field correlation factors for the three base materials and for three
models were also estimated. The influence of moisture content and degree of
compaction was not modelled in this study.
5.2. Permanent Deformation Model for Bituminous Bound Layers
An evaluation of the permanent deformation model for asphalt concrete mixtures,
shown in Equation (20), was carried out based on ELWT and full scale APT tests
performed on three different types of asphalt mixtures. The tests were performed
at several pavement temperatures and efforts were made to simulate the actual
field conditions (Paper VI).
The measured permanent deformations in the asphalt slabs were modelled
using the permanent deformation model in Equation (20) and model parameters
a1, a2 and a3 for the three types of asphalt mixtures were estimated based on least
square optimization. 1 was considered as unity for ELWT tests. The estimated
mode parameters were then used to model the measured permanent deformation
of a test structure SE09 shown in Figure 11. The test structure consisted of the
three mixtures tested using the ELWT device. The calibration parameters 1, in
Equation (20), were estimated for the mixtures. Here, it should be noted that the
1 factor was used to relate the model parameters from the ELWT and the HVS
test. Figure 24 shows the measured and modelled permanent deformations in the
bituminous bound layers of the test structure.
The estimated factors were close to unity for all mixtures which indicated
that the ELWT device fairly represented the behaviour of the full scale APT test.
It should also be noted that slight differences in 1 were observed though efforts
were made to reproduce the APT test circumstances (Paper VI). Therefore it was
demonstrated that the ELWT device can be used to evaluate the performance
asphalt mixtures as well as to establish parameters for permanent deformation
model for asphalt mixtures. The slight differences in 1 from unity might be
attributed to differences in geometry, scale, wheel load and speed.
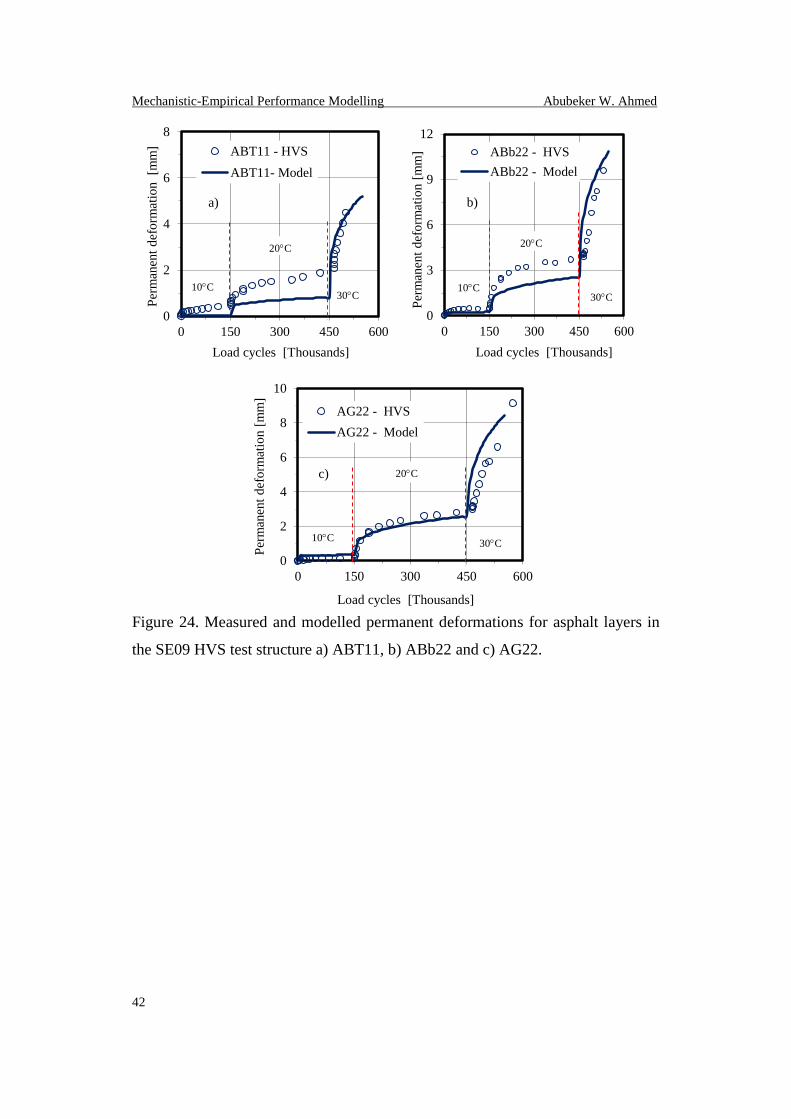
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
42
Figure 24. Measured and modelled permanent deformations for asphalt layers in
the SE09 HVS test structure a) ABT11, b) ABb22 and c) AG22.
0
2
4
6
8
0 150 300 450 600
Per
man
ent
def
orm
atio
n
[mm
]
Load cycles [Thousands]
ABT11 - HVS
ABT11- Model
30C 10C
20C
0
3
6
9
12
0 150 300 450 600
Per
man
ent
def
orm
atio
n [
mm
]
Load cycles [Thousands]
ABb22 - HVS
ABb22 - Model
30C 10C
20C
0
2
4
6
8
10
0 150 300 450 600
Per
man
ent
def
orm
atio
n [
mm
]
Load cycles [Thousands]
AG22 - HVS
AG22 - Model
10C
20C
30C
a) b)
c)

Characterization of Heavy Traffic Axle Load Spectrum
43
6. Characterization of Heavy Traffic Axle Load
Spectrum
Heavy traffic axle load spectrum (ALS) is one of the key inputs for mechanistic-
empirical analyses and design of pavement structures. For the purpose of
pavement design, the entire ALS is aggregated into Equivalent Number of
Standard Axle Loads (ESALs) or characterized by either constant contact area
(CCA) or constant contact pressure (CCP). These characterizations affect both the
accuracy and computational performance of the pavement analysis process.
Usually a standard axle load of 80 kN or 100 kN is used to convert the ALS into
ESALs or to obtain the contact area for the CCA characterizations. The CCP
characterization is a relatively accurate representation of the actual field
conditions as observed by tyre inflation pressure measurements of actual traffic
scenarios (Morton et al., 2004).
In Paper IV these three alternatives were evaluated based on the predicted
rutting and fatigue cracking performances of several pavement structures
subjected to heavy traffic ALS data collected from BWIM stations. It was
indicated that for layers below the 25 cm from the surface, the three
characterizations produced similar values of predicted rutting. However, for the
top 25 cm, the characterizations produced significant differences. Figure 25a to
25d shows the permanent deformation in the surface, base, subbase and subgrade
layers, respectively, of a typical four layered pavement structure subjected to a
heavy traffic ALS from one of the BWIM sites. The figure indicated that both the
ESAL and CCA characterizations underestimated the predicted permanent
deformation.
The Paper indicated that even though the CCP characterization is a relatively
accurate representation of the actual traffic conditions, it is computationally very
expensive and impractical for routine applications. On the other hand the ESAL
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
44
and CCA characterizations are computationally very efficient for M-E pavement
analysis and design applications; however, both characterizations underestimated
the calculated permanent deformation. Therefore in this study an improvement to
the CCA approach was proposed that enhanced the accuracy while maintaining
the same level of computational performance. Figure 26a and 26b presents the
predicted permanent deformation using the improved CCA approach (denoted by
modified CCA [MCCA] in the figure). From the figure it can be observed that a
significant improvement was gained when using the proposed MCCA approach.
Figure 25. Permanent deformation in a) surface layer, b) base layer, c) subbase
and d) subgrade.
0.0
2.0
4.0
6.0
8.0
0 5 10 15 20
Per
man
ent
def
orm
atio
n [
mm
]
Pavement age [year]
ESAL
CCA
CCP
a)
0.0
0.5
1.0
1.5
2.0
0 5 10 15 20
Per
man
ent
def
orm
atio
n [
mm
]
Pavement age [year]
ESAL
CCA
CCP
b)
0
0.2
0.4
0.6
0.8
0 5 10 15 20
Per
man
ent
def
orm
atio
n [
mm
]
Pavement age [year]
ESAL
CCA
CCP
c)
0.0
0.2
0.4
0.6
0.8
1.0
1.2
0 5 10 15 20
Per
man
ent
def
orm
atio
n [
mm
]
Pavement age [year]
ESAL
CCA
CCP
d)
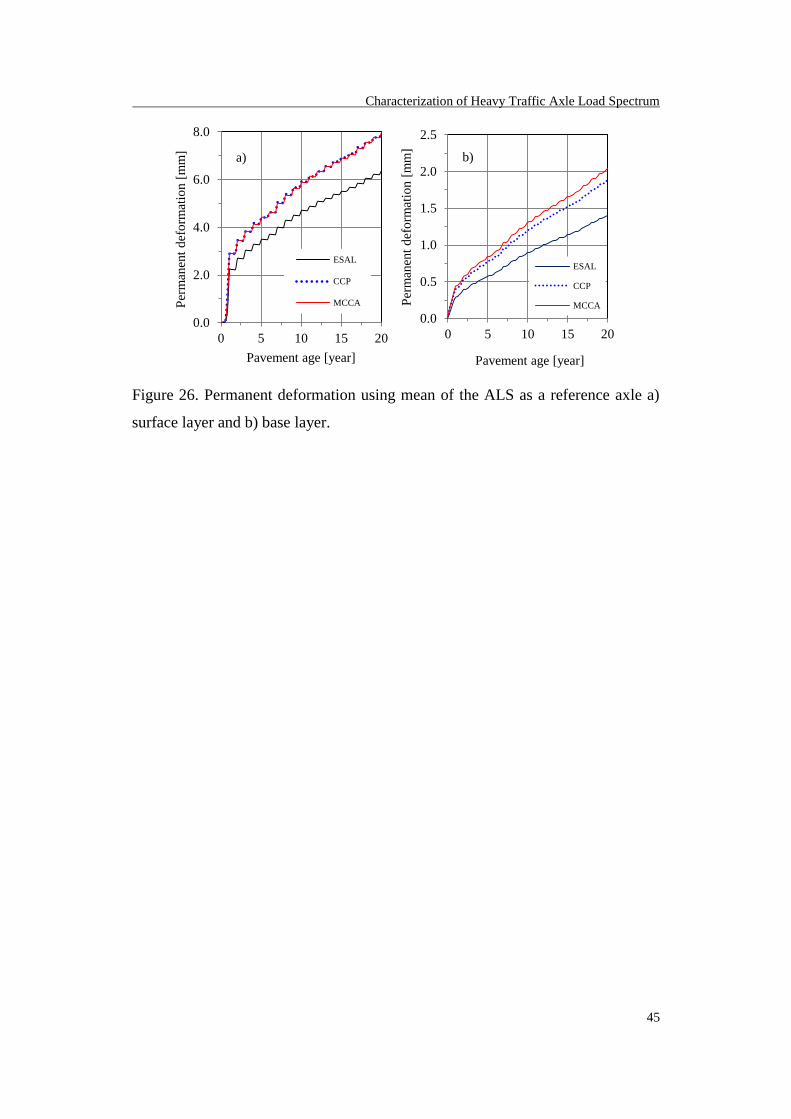
Characterization of Heavy Traffic Axle Load Spectrum
45
Figure 26. Permanent deformation using mean of the ALS as a reference axle a)
surface layer and b) base layer.
0.0
2.0
4.0
6.0
8.0
0 5 10 15 20
Per
man
ent
def
orm
atio
n [
mm
]
Pavement age [year]
ESAL
CCP
MCCA
a)
0.0
0.5
1.0
1.5
2.0
2.5
0 5 10 15 20
Per
man
ent
def
orm
atio
n [
mm
]
Pavement age [year]
ESAL
CCP
MCCA
b)


Conclusions and Recommendations
47
7. Conclusions and Recommendations
The objective of this study was to develop a mechanistic-empirical (M-E) flexible
pavement performance prediction framework. The work particularly concentrated
on evaluating the most important constituents of the M-E methods, namely, the
response model, permanent deformation models for bound and unbound pavement
materials, and heavy traffic characterization. The subsequent sections present the
conclusions, recommendations and limitations from of study.
7.1. Response Model
The response model is one of the key components of M-E design procedures. The
multilayer elastic theory (MLET) is employed in several M-E pavement design
procedures due to its simplicity and computational performance. In this study, an
MLET program ERAPAVE (Elastic Response Analysis Program for Flexible
PAVEments) which was based on the Burmister theory was developed and a
considerable effort was made to further improve the computational performance
of the program. In addition a procedure based on Richardson’s extrapolation was
introduced to improve the accuracy and convergence of near-surface responses. A
comprehensive verification of the ERAPAVE program using two frequently used
layered elastic programs, KENPAVE and WinJulea, was performed and the
accuracy obtained was excellent. The comparison of the performance of the three
programs revealed that the ERAPAVE program has an improved computational
performance, especially for a larger number of evaluation points, which is usually
the case for M-E design applications. Moreover, a nonlinear module was
introduced into the program to take stress dependent behaviour of unbound
materials into account.
Asphalt mixtures exhibit unique characteristics of both viscous and elastic
properties and hence are categorized as viscoelastic materials. Therefore the
ERAPVE program was extended to incorporate the viscoelastic behaviour of

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
48
bituminous layers through the elastic-viscoelastic correspondence principle. A
procedure based on collocation of linear viscoelastic (LVE) solutions at selected
time durations was also proposed that improved the computational performance
for analysis of stationary and moving loads.
7.2. Permanent Deformation Models
Rutting is one of the distresses that M-E pavement design procedure attempts to
control and it is well understood that rutting is the result of the permanent
deformation in the constituent layers of the pavement due to the prevailing traffic
and environmental condition. Therefore, it is necessary to model the permanent
deformation in bound and unbound layers of the pavement.
In this study, three M-E permanent deformation models for unbound granular
materials (UGMs) were evaluated based on three accelerated pavement tests
(APTs). The APTs were conducted on three test structures with different base
materials. The permanent deformation models evaluated were the Tseng and
Lytton (1989), Gidel et al. (2001) and Korkiala-Tanttu (2005). Models by Tseng
and Lytton and Korkiala-Tanttu showed slight differences between patterns of
permanent deformation for the base materials whereas the Gidel et al. model has
shown a similar trend for the three base materials, i.e. a steep slope at the initial
phase of the loading and a milder slope afterwards, and a good fit was obtained for
crushed rock base material. In general, the Tseng and Lytton model agreed
relatively well with all types of base materials. Laboratory to field correlation
factors for the three materials were also estimated for the models.
Furthermore, one permanent deformation model for asphalt layers was also
evaluated using an extra-large wheel tracking (ELWT) and APT tests. The model
produced reasonable magnitudes and trends for permanent deformation in the
asphalt layers. In addition, a calibration factor relating the ELWT device and the
APT facilities indicated that the ELWT device could fairly simulate the conditions
of APT and it can be employed to establish model parameters for the permanent
strain model.

Conclusions and Recommendations
49
7.3. Heavy Vehicle Characterization
Traffic loading is one of the most important factors influencing the performance
of flexible pavements. Therefore M-E pavement design procedures must account
for the effect of traffic. Due to the nature and the complexity of traffic data, M-E
pavement design procedures adopt different types of characterization and
simplification of the raw traffic data. This study discussed and evaluated three
different approaches for characterizations of heavy traffic ALS, namely, the
equivalent standard axle load (ESAL), the constant contact area (CCA) and the
constant contact pressure (CCP) approaches. Field measurement studies showed
that the CCP is a more realistic characterization of the actual traffic conditions;
however, it was shown that it is computationally very expensive for M-E
applications.
The characterizations were evaluated based on the predicted permanent
deformation and fatigue cracking performances and they produced similar results
for layers below 25 cm from the surface. However both the ESAL and CCA
approaches underpredicted the permanent deformations for the top 25 cm. The
error introduced, due to ESAL and CCA characterizations, reached up to 35% for
the permanent deformation and up to 70% for fatigue cracking. The computational
performances of the three characterizations were also evaluated; the ESAL
produced the highest performance, followed by the CCA. An improvement to the
CCA approach was also proposed that enhanced the accuracy while maintaining
the same level of computational performance.
7.4. Limitations and Recommendations for Future Studies
It is essential to state that the impact of climate such as temperature, moisture,
freezing-thawing, ground water table and drainage conditions were not fully
considered when evaluating the permanent deformation models for UGMs and
bituminous bound layers. This was due to the fact that the study mainly employed
results from full scale APT tests, where the temperature and the moisture in the
pavements were controlled. Moreover, unlike pavements under real traffic
scenarios, the APT test structures considered in the study were subjected to only a

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
50
single axle configuration. Therefore a validation of the models and the model
parameters using actual field conditions is recommended.
The stress dependent nature of UGMs was considered in the study; however,
the bituminous bound layers were treated as linear elastic materials and the effect
of aging was not taken into account. Furthermore, as MLET theory was employed
in the study, it was not possible to implement advanced characterization of the
materials such as anisotropic behaviours. Therefore these influences should be
assessed and incorporated through advanced materials characterizations and
rigorous modelling techniques such as the finite element method (FEM).
Finally, this study focused mainly on the M-E prediction and development of
rutting for flexible pavements and therefore other failure modes of flexible
pavements such as cracking, low temperature cracking and the international
roughness index (IRI) were not incorporated.
References
51
References
Abate, J., and Valko, P. P., 2004. Multi-precision Laplace transform inversion.
International Journal of Numerical Methods in Engineering, 60(5), 979–993.
Acum, W. E. A., and Fox, L., 1951. Computation of load stresses in a three-
layered elastic system. Geotechnique, London, 2(4), pp. 293-300.
Ahlvin, R. G., and Ulery, H. H., 1962. Tabulated values for determining the
complete pattern of stresses, strains and deflections beneath a uniform circular
load on a homogeneous half space. Bulletin 342, Highway Research Board, pp.
1-13.
ARA., 2004. Guide for the Mechanistic Empirical Design of New and
Rehabilitated pavement Structure. (Report 1-37A), Washington, D. C:
Transportation Research Board of the National Academies.
Barksdale, R. D., 1972. Laboratory evaluation of rutting in base course materials.
Proceedings of 3rd
International Conference on Structural Design of Asphalt
Pavements, pp. 161–174.
Blab, R., and Litzka, J., 1995. Measurements of the lateral distribution of heavy
vehicles and its effects on the design of road pavements, Proceedings of the 4th
International symposium on Heavy Vehicle Weights and Dimensions, Ann
Arbor.
Bonaquist, R. F., and Witczak, M. W., 1997. A comprehensive constitutive model
for granular materials in flexible pavement structures. Proceedings of 8th
International Conference on Asphalt Pavements, Seattle, U.S.A., pp. 783-802.
Bouteldja, M., Jacob, B., and Dolcemascolo, V., 2008. Optimized design of
weight-in-motion multiple-sensors array by energy approach. 10th
International
Symposium on Heavy Vehicle Transport Technology, Paris, France, pp. 195-
203.
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
52
Brown, S. F., and Hyde, A. F. L., 1975. Significance of cyclic confining stress in
repeated-load triaxial testing of granular material. Transport Research Record
537, Transportation Research Board, Washington, D. C., pp. 49– 58.
Bufler, H., 1971. Theory of elasticity of a multilayered medium. Journal of
Elasticity, 1(2), pp. 125-143.
Burmister, D. M., 1943. The theory of stresses and displacements in layered
system and application to the design of airport runways. Proceedings of the
Highway Research Board, Washington, D. C, 23, pp. 126–148.
Burmister, D. M., 1945. The general theory of stresses and displacements in
layered soil systems. Journal of Applied Physics, 16(2), pp. 89–96, 16(3), pp.
126–127, 16(5), 296–302.
Cebon, D., and Winkler, C. B., 1991. Multiple-sensor weight-in-motion: Theory
and experiments. Transportation Research Record, No. 1311, Transportation
Research Board, Washington, D. C., pp. 70–78.
Chan, F. W. K., 1990. Permanent Deformation Resistance of Granular Layers in
Pavements. PhD Thesis, Department of Civil Engineering, University of
Nottingham, Nottingham, England.
Chou, Y. T., 1969. General theory of stresses and displacements in elastic and
viscoelastic layered systems. Final Report WESMPM698, Vicksburg, MS:
Army Engineer Waterways Experiment Station.
Collop, A. C., Cebon, D., and Hardy, M. S. A., 1995. Viscoelastic approach to
rutting in flexible pavements. Journal of Transportation Engineering, ASCE,
121 (1). pp. 82-93.
Corte, J.-F., Brosseaud, Y., Simoncelli, J-P., and Caroff, G., 1994. Investigation
of rutting of asphalt surface layers: Influence of binder and axle loading
configuration. Transportation Research Record 1436. pp. 28-37.
Daniel, J. S., and Kim, Y. R., 2001. Laboratory evaluation of fatigue damage and
healing of asphalt mixtures. Journal of Materials in Civil Engineering, ASCE,
Vol. 13, No. 6, pp. 434-440.

References
53
Desai, C. S., 2002. Mechanistic pavement analysis and design using unified
material and computer models. Proceedings of 3rd
International Symposium on
3D Finite Element for Pavement Analysis, Amsterdam, The Netherlands, pp. 1-
63.
Donovan, P., and Tutumluer, E., 2008. Effect of Aircraft Load Wander on
Unbound Aggregate Pavement Layer Stiffness and Deformation Behaviour.
Proceedings of the 2008 Airfield and Highway Pavements, October 15-18,
Bellevue, Washington, pp. 465-476, DOI: 10.1061/41005(329)40.
Dorman, G. M., 1962. The Extension to practice of a fundamental procedure for
the design of flexible pavements. Proceedings of 1st International Conference
on the Structural Design of Asphalt Pavements, Ann Arbor, pp. 785-793.
Dunlap, W. A., 1966. Deformation Characteristics of Granular Materials
Subjected to Rapid Repetitive Loading. PhD Thesis, Texas A&M University,
College Station, Texas.
Erlingsson, S., 2010a. Characterization of heavy traffic on the Swedish road
network, Proceedings of the 11th
International Conference on Asphalt
Pavements, Nagoya, 01 – 06 August, Japan, CD-ROM.
Erlingsson, S., 2010b. Impact of water on the response and performance of
pavement structure in an accelerated test. Road Materials and Pavement
Design, 11(4), pp. 863–880.
Erlingsson, S., Said, S. F, and McGarvey, T., 2012. Influence of heavy traffic
lateral wander on pavement deterioration. Proceedings of the 4th
European
Pavement Asset Management Conference, Malmö, Sweden.
Erlingsson, S., Winnerholt, T., and Persson, L., 2010. Axle Load Spectra
Characteristics of the Swedish Road Network. Transport Research Arena
Europe Conference, 7-10 June, Brussels, CD-ROM.
FHWA, 2003. Distress Identification Manual for the Long – Term Pavement
performance Performance Program (4th
Revised Edition). Report No. FHWA-
RD-03-031, US Department of Transportation, Federal Highway
Administration.
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
54
Gidel, G., Hornych, P., and Chauvina, J., 2001. A new approach for investigating
the permanent deformation behaviour of unbound granular material using the
repeated load triaxial apparatus. Bulletin des Laboratoires des Ponts et
Chaussees, 233, Ref. 4359, pp. 5–21.
Haas, R. C. G., Hudson, W. R., and Zaniewski, J. P., 1994. Modern Pavement
Management. Krieger Publishing Company, Malabar, Florida.
Haider, S. W., and Harichandran, R. S., 2009. Effect of axle load spectrum
characteristics on flexible pavement performance. Transportation Research
Record: Journal of the Transportation Research Board, No. 2095,
Transportation Research Board of the National Academies, Washington, D. C.,
pp. 101–114.
Hayhoe, G. F., 2002. LEAF – A new layered elastic computational program for
federal aviation administration pavement design and evaluation procedures.
Federal aviation administration airport technology transfer conference,
Atlantic City, New Jersey, USA.
Holubec, I., 1969. Cyclic Creep of Granular Materials. Report No. RR147,
Department of Highways, Ontario, Canada.
Hopman, P. C., 1996. VEROAD: A viscoelastic multilayer computer program.
Transportation Research Record: Journal of the Transportation Research
Board, No. 1539, Transportation Research Board of the National Academies,
Washington, D. C., pp. 72–80.
Hornych, P., Chazallon, C., Allou, F., and El Abd, A., 2007. Prediction of
permanent deformations of unbound granular materials in low traffic
pavements. Road Materials and Pavement Design, 8(4), pp. 643-666.
Hornych, P., Kazai, A., and Piau, J. M., 1998. Study of the resilient behaviour of
unbound granular materilas. Proceedings 3rd
International Conference on
Bearing Capacity of Roads, Railways, and Airfields, Trondheim, pp. 1277-
1287.

References
55
Huang, Y. H., 1968. Stresses and displacements in nonlinear soil media. The
Journal of Soil Mechanics and Foundation Division, ASCE, 94(1), pp. 1-19.
Huang, Y. H., 2004. Pavement Analysis and Design. USA: Pearson Prentice Hall.
Jones, A., 1962. Tables of stresses in three layer elastic system, Highway
Research Bulletin, No. 342.
Khazanovich, L., and Wang, Q., 2007. High-performance layered elastic analysis
program. Transportation Research Record: Journal of the Transportation
Research Board, No. 2037, pp. 63-75.
Kim, J., 2011. General viscoelastic solutions for multilayered systems subjected to
static and moving loads. Journal Mater. Civil Engineering. ASCE 23(7), pp.
1007–1016.
Kolisoja, P., 1998. Large Scale Dynamic Triaxial Tests for Arbeidsfellsskapet
KPG, Results of the Permanent Deformation Tests. Delprosjektrapport KPG
20, Tampere.
Korkiala-Tanttu, L., 2005. A new material model for permanent deformations in
pavements. Proceedings of the 7th
International Conference on Bearing
Capacity of Roads, Railways and Airfields, Trondheim [CD-ROM], pp. 10.
Korkiala-Tanttu, L., 2008. Calculation Method for Permanent Deformation of
Unbound Pavement Materials. PhD. Thesis, Helsinki University of
Technology, Finland.
Lekarp, F., 1997. Permanent Deformation Behaviour of Unbound Granular
Materials. Licentiate Thesis, Royal Institute of Technology, Stockholm.
Lekarp, F., and Dawson, A., 1998. Modelling permanent deformation behaviour
of unbound granular materials. Construction and Building Materials, 12(1), 9–
18.
Lekarp, F., Isacsson, U., and Dawson, A., 2000a. State of the art I: Resilient
response of unbound aggregates. Journal of Transportation Engineering,
ASCE, 126(1), pp. 66–75.
Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
56
Lekarp, F., Isacsson, U., and Dawson, A., 2000b. State of the art II: Permanent
strain response of unbound aggregates. Journal of Transportation Engineering,
ASCE, 126 (1), pp. 76-83
Lijzenga, J., 1997. On the prediction of pavement rutting in the shell pavement
design manual, 2nd
European Symposium on Performance and durability of
bituminous materials, Leeds, UK.
Long, F. M., 2001. Permanent Deformation of Asphalt Concrete Pavements: A
Nonlinear Viscoelastic Approach to Mix Analysis and Design, Doctoral
Dissertation, University of California, Berkeley.
Lytton, R. L., Uzan, J., Fernando, E. G., Roque, R., Hiltumen, D., and Stoffels, S.
M., 1993. Development and validation of performance prediction model and
specifications for asphalt binders and paving mixes (Report No. SHRP-A-357).
Washington, D. C: The Strategic Highway Research Program Project.
Maina, J., and Matsui, K., 2005. Elastic multilayered analysis using DE-
Integration. Publications of the Research institute for Mathematical Sciences,
41(5), pp. 853-867.
Matthews, J. M., and Monismith, C. L., 1992. The effect of aggregate gradation
on the creep response of asphalt mixtures and pavement rutting estimates,
ASTM STP 1147.
Mobasher, B., Mamlouk, M., and Lin, H., 1997. Evaluation of crack propagation
properties of asphalt mixtures. Journal of Transportation Engineering, 123(5),
pp. 405–413.
Morgan, J. R., 1966. The response of granular materials to repeated loading.
Proceedings 3rd
Conference, ARRB, pp. 1178-1192.
Morton, B. S., Luttig, E., Horak, E., and Visser, A. T., 2004. The effect of axle
load spectra and tyre inflation pressures on standard pavement design method.
Proceedings of the 8th
Conference on Asphalt Pavements for Southern Africa
(CAPSA'04), 12-16 September, Sun City, South Africa.
References
57
Moses, F., 1979. Weight in motion system using instrumented bridge.
Transportation Engineering Journal, ASCE, pp. 233-249.
Oscarsson, E., 2011. Evaluation of the mechanistic-empirical pavement design
guide model for permanent deformation in asphalt concrete. International
Journal of Pavement Engineering, 12(1), pp. 1-12.
Papagiannakis, A. T., Amoah, N., and Taha, R., 1996. Formulation for
viscoelastic response of pavement under moving dynamic loads. Journal of
Transport Engineering. ASCE, 122(2), pp. 140-145.
Paute, J. L., Hornych, P., and Benaben, J. P., 1996. Repeated load triaxial testing
of granular materials in the French network of Laboratories des Ponts et
Chaussees. Proceedings of the European Symposium Eurofles 1993, Lisbon,
Balkema, pp. 53-64.
Peattie, K. R., 1962. Stress and strain factors for three layered elastic systems,
Highway Research Bulletin No. 342.
Pidwerbesky, B. D., 2004. Performance-based contracts and their impact on
construction and maintenance practices: A contractor’s perspective.
Proceedings of the 6th
International Conference on Managing Pavements,
Brisbane, Queensland, Australia.
Prozzi, J. A., and Hong, F., 2007. Optimum statistical characterization of axle
load spectra based on load-associated pavement damage. International Journal
of Pavement Engineering, 8(4), pp. 323–330.
Said, S. F., Hakim, H., Osscarson, E., and Hjort, M., 2011. Prediction of flow
rutting in asphalt concrete layers. International Journal of Pavement
Engineering, 12(6), pp. 519-532.
SAMARIS., 2004. Selection and evaluation of models for prediction of permanent
deformations of unbound granular materials in road pavements. Sustainable
and Advanced Materials for Road Infra-structures, Work Package 5
Performance-based specifications.

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
58
Sousa, J. B., Craus, J., and. Monismith, C. L., 1991. Summary report on
permanent deformation in asphalt concrete, Strategic Highway Research
Program National Research Council, Washington, D. C.
Sweere, G. T. H., 1990. Unbound Granular Bases for Roads. PhD. Thesis,
University of Delft, Delft.
Tayfur, S., Ozen, H., and Aksoy, A., 2007. Investigation of rutting performance of
asphalt mixtures containing polymer modifiers. Construction and Building
Materials 21(2), pp. 328–337.
Thom, N. H., and Brown, S. F., 1988. The effect of grading and density on the
mechanical properties of a crushed dolomitic limestone. Proceedings of the
Australian Road Research Board, 14(7), pp. 94–100.
Timoshenko, S., and Goodier, I. N., 1951. Theory of Elasticity. New York:
McGraw-Hill.
Tseng, K. H., and Lytton, R. L., 1989. Prediction of permanent deformation in
flexible pavement materials. In H. G. Schreuders & C. R. Marek (Eds.).
Implication of Aggregates in the Design, Construction, and Performance
Flexible Pavements, Philadelphia, PA: ASTM, pp. 154–172.
Ullidtz, P., 1987. Pavement analysis. Development in Civil Engineering, Vol.19,
Amsterdam, The Netherlands.
Ullidtz, P., Harvey, J., Tsai, B. W., and Monismith, C., 2006. Calibration of
incremental-recursive damage models in CalME using HVS experiments,
Report No. UCPRC-RR-2005-06, Pavement Research Centre, Institute of
Transport Studies, University of California, Berkeley and Davis, California,
USA.
Uzan, J., 1985. Characterization of granular materials. Transportation Research
Record 1022, pp. 52-59, National Research Council, Washington, D. C.
Van Cauwelaert, F. J., 2003. Pavement design and evaluation: The required
mathematics and its application. Brussels: Federation of the Belgian Cement
Industry.

References
59
Van Cauwelaert, F. J., and Lequeux, D., 1986. Computer Programs for the
Determination of Stresses and Displacements in Four Layered Structures.
Water Experiment Station, U.S. Army Corps of Engineers, Vicksburg, Miss.
Verstraeten, J., 1967. Stresses and displacements in elastic layered systems.
Proceedings of 2nd
International Conference on the Structural Design of
Asphalt Pavements, Ann Arbor, Michigan, pp. 223–238.
Wang, J., Birgisson, B., and Roque, R., 2007. Window-based top-down cracking
design tool for Florida: Using energy ratio method. Transportation Research
Record: Journal of the Transportation Research Board, No. 2037,
Transportation Research Board of the National Academies, Washington, D. C.,
pp. 86–96, DOI: 10.3141/2037-08.
Wang, L. B., Myers, L. A., Mohammad, L. N., and Fu, Y. R., 2003..
Micromechanics study on top-down cracking. Transportation Research Record:
Journal of the Transportation Research Board, No. 1853, Transportation
Research Board of the National Academies, Washington, D. C., pp. 121–133.
Wiman, L. G., 2001. Accelerated Load Testing of Pavements: HVS-NORDIC tests
at VTI Sweden 1999. VTI Report 477A, Linköping: Swedish National Road and
Transport Research Institute.
Wiman, L. G., 2006. Accelerated Load Testing of Pavements: HVS-NORDIC tests
at VTI Sweden 2003–2004. VTI report 544A, Linköping: Swedish National
Road and Transport Research Institute.
Wiman, L. G., 2010. Accelererad Provning av Vägkonstruktioner Med och Utan
Polymermodifierat Bitumen i Bindlager (In Swedish). VTI report 576,
Linköping: Swedish National Road and Transport Research Institute.
Wiman, L. G., and Erlingsson, S., 2008. Accelerated pavement testing by HVS –
trans-national testing equipment. Ljubljana: Transport Research Arena
Europe, [CD-ROM].
Winnerholt, T., and Persson, L., 2010. Results from 6 years of Swedish
measurements with bridge weight in motion (WIM) systems during 2004 –

Mechanistic-Empirical Performance Modelling Abubeker W. Ahmed
60
2009. HVTT11 – International Heavy Vehicle Symposium, Melbourne,
Australia.
Wu, R., and Harvey, J. T., 2008. Evaluation of the effect of wander on rutting
performance in HVS Tests, Proceedings of the 3rd
International Conference on
Accelerated Pavement Testing, October, Madrid, Spain.