laboratory experiments and a consistent theory for low
TRANSCRIPT

האוניברסיטה העברית בירושליםThe Hebrew University of Jerusalem
Faculty of Science
Fredy and Nadine Herrmann Institute of Earth Sciences
Ring Department of Atmospheric Sciences
Laboratory experiments and a consistent
theory for low-frequency waves over a
linearly sloping bottom on the f-plane
M.Sc. Thesis
Submitted by:
Yair Cohen ID 03645997
Thesis Advisor: Prof. Nathan Paldor
February 2009

Abstract: Low frequency waves that evolve in a fluid over a linearly slopping bottom on the
f–plane are investigated in two cases: An infinitely wide channel, with two long shore
boundaries and a shelf of finite width, where the fluid surface intersects the slopping
bottom at the shallow side while a long-shore boundary is present on the shelf's deep.
A Linear Shallow Water Model is solved for each of the two cases and the theoretical
results are compared to experimental findings.
In both cases numerical solutions reveal the existence of waves that propagate
with the shallow boundary on the right in the northern hemisphere. In a channel the
dispersion relation shows vanishing frequencies for both large and small
wavenumbers and a maximal frequency at a finite wavenumber. The frequencies were
found to differ from the classical harmonic theory by more than an order of unity in
wide channels or in steep slopes. In a shelf the dispersion relation shows vanishing
frequencies for small wavenumbers and a non-vanishing frequency that approaches a
constant value at large wavenumbers. These solutions are consistent with existing
asymptotic approximated solutions that were derived for an infinite shelf.
Both cases were tested in laboratory experiments on a 13 m diameter turntable at
LEGI-Coriolis (France). The linear slope in the experiments was 10% and the wave's
period and wavenumber were measured using a Particle Imaging Velocimetry (PIV)
technique. The experimental results regarding the dispersion relation and the radial
structure of the radial velocity are in good agreement with the (numerically derived)
theoretical predictions. These results clearly showed that in wide channels the
amplitude is trapped near the shallow wall.
In a channel a simple formula for the dispersion relation is developed by
approximating the velocity eigenfunctions by Airy function, which agrees with the
numerical solution for a wide channels or a steeply sloping bottom. These solutions
(that apply for infinitely wide channels as well) mandate that the waves occupy a
small part of the channel located close to the shallow side and vanish throughout most
of the channel width, so the channel width is filtered out of the problem provided it is
sufficiently large. A length scale for the channel’s width is found that defines the
harmonic regime and the Airy solution regime depending on the channels slope, wave
mode and wavenumber.
ii

Contents: Acknowledgments…………………………………………………. List of symbols……………………………………………………... List of figures……………………………………………………….
1. Introduction and background 1.1 General…………………………...…………………………. 1.2 The description of the problem……………………………... 1.3 Observational background……………………....................... 1.4 Theoretical Background………………………………….…..
A. Channel…………..………………………………………. B. Shelf………………..………………………......................
1.5 Experimental Background…………………………………... 2. Theoretical research
2.1 Formulation of the problem…………………………………. 2.2 The channel…………………………………………….…….
A. Exact - numerical results…………………..………….….. B. The harmonic limit…………………………………..…… C. Airy function solution……………………….……………
2.3 The shelf…………………………………………………….. A. Boundary conditions……………………………………... B. Local behavior and numerical solutions…….………...
3. Laboratory experiments 3.1 General………………………………………………………. 3.2 Physical setup and course of experiments………….………...
A. The tank…………...……………………………………… B. Wave generation technique………………..…….………... C. Wave imaging…………………………..…….…………...
3.2 Images analysis………………………………….…………… A. Velocity vector field…………………..…….……………. B. Period verification………………………...………………. C. Phase and amplitude……………………………..………..
3.3 Experimental Results………………………………………… A. Channel………...…………………………………………. B. Shelf………………...……………………………………..
4. Summery and discussion Bibliography……………….………..……………………………...... Appendix A…………………………...……………………………… Appendix B……………………………...……………………………
1 2 3 4 4 4 6 7 7 8 9 11 11 13 13 14 16 21 21 22 26 26 26 26 27 28 28 29 30 30 32 32 35 37 39 41 43
iii

Acknowledgments: My personal appreciation is given To my supportive parents To my supervisor Professor Nathan Paldor for the unique combination of guidance teaching and constructive criticism that led me to the presentation of this work To my friends at the GFD Laboratory - Ori Adam, Yair De-Leon and Andrey Sigalov for numerous contributing conversations and good company This work involves laboratory experiments that were taken at LEGI-Coriolis France I'd like to thank Hydralab-III 6th frame-work program for the funding of the experiments Professor Joel Sommeria, Mr. Henri Didelle and Mr. Samuel Viboud from LEGI-Coriolis laboratory for their guidance and the technical support in this part of the research

List of symbols: ( * - indicates dimensional parameters)
Variable Description
x long-shore horizontal Cartesian coordinate
y off-shore horizontal Cartesian coordinate
z vertical Cartesian coordinate
t time
H0 undisturbed depth at y=0 (dimensional constant)
H' the bottom slope (constant)
H the undisturbed depth (a function of y only: H=H0+H'y)
L channel width (in the off-shore direction)
f Coriolis parameter
Rd Rossby radius of deformation (Rd=(gH0)1/2/f )
u long-shore velocity
v off-shore velocity
η vertical displacement of the free surface from the mean height
k long-shore wavenumber
c long-shore phase speed
ω angular frequency
T period
δ non-dimensional parameter of the LSWE: *0H Rd Hδ ′=
2

List of figures:
1. Cross sections of the setups in the two different cases.
2. Numerical results showing dispersion relation and amplitude of TRW.
3. A comparison between numerically calculated TRW and the harmonic
approximation of TRW.
4. Solution of the Airy function.
5. Numerically calculated dispersion relation of first mode TRW in different
channel width compared with the Airy solution.
6. A comparison of dispersion relations obtained from numerical solution,
harmonic approximation and the Airy-function approximation.
7. Numerically calculated amplitudes of vertical displacement and off-shore
velocity of TRW in a channel for the first three modes.
8. Numerically calculated dispersion relation of continental shelf waves
9. Numerically calculated dispersion relation of the first quasi-geostrophic mode
continental shelf waves.
10. A radial cross section and a horizontal upper view of the tank.
11. Experimentally measured horizontal velocity vector field.
12. Experimentally measured time series showing the off shore velocity vs. frame
numbers.
13. Phase diagram and its tangential slice.
14. A comparison between numerical and experimental results for the dispersion
relation of TRW in two different channels.
15. Numerical and experimental radial amplitudes (eigenfunctions) of the off-
shore velocity.
16. A comparison between numerical and experimental results for the dispersion
relation of CSW.
3

Chapter 1
Introduction and background 1.1 General:
The Linearized Shallow Water Equation (hereafter 'LSWE') when applied for
a sloping bottom f-plane exhibits low frequency wave solutions (often referred to
as second class oscillations) that are analogous to the planetary Rossby waves
where the depth variations play the roll of Coriolis force variations in the strict
potential-vorticity considerations. These barotropic waves, whose frequency is
lower than the Coriolis parameter, are divided into two cases by the different
setups. One setup, referred as the 'channel', has two physical long-shore
boundaries and its low frequency waves are known as Topographic Rossby Waves
(hereafter 'TRW'). In the other setup, referred as the 'shelf', the sloping bottom
meets the free surface of the water at the shallow side and a long-shore physical
boundary is present only at the deep side. The waves that exist in this setup are
termed 'Edge Waves' and their low frequency class is known as Continental Shelf
Waves (hereafter 'CSW').
The topographic effect on fluid flow in meso-scale dynamics is of great
importance both in the ocean and in the atmosphere. It is analogues to Earth
curvature effect that mandates complicated flows patterns different from purely
uniform rotation flow in the synoptic scale. In specific, low frequency waves that
are a direct application of angular momentum conservation are governed by the
combination of rotation and depth variation forced by topography. This study
reports both theoretical and experimental investigation of these second class
oscillations in the two cases: First, for TRW in an infinitely wide channel where
the classical theory does not apply and second, for CSW on a finite shelf.
1.2 The description of the problem: This study includes an investigation of two different setups, see fig. 1 below.
In both setups are considered unbounded in the x-direction (long shore) and
bounded in the y-direction (off shore) and the bottom slope is a function of y only
and occupies the full width (i.e. off shore extant). The rotation is counter
4

clockwise as in the northern hemisphere and the Coriolis parameter is assumed
constant (hence planetary Rossby waves are excluded from this analysis).
The depth scale H0 is defined as the depth at y=0 and is assumed much smaller
than the vertical extant of the fluid. A more conventional definition of the depth
scale as the depth at the center of the channel is impractical when the channel
width is taken to infinity. The fluid is considered barotropic and the perturbation
from the state of motionless fluid and mean height of the free surface (z=0) is
described by a linear wave solution. In the channel (LHS in figure 1) with the two
long shore boundaries, solution are presented with the deep side wall taken
infinitely far on the positive y-direction. In the shelf case (RHS of figure 1) the
undisturbed depth vanishes at the shallow side (at y*=-H0/H') and a physical
boundary is found in the deep side only, solutions are presented for finite width
shelves.
H*0
y*
z*
H*0
x* L *
z*=0
η*
f
H*=0 y*=0
z*=0
H0/H'+ L*
η*
y*=L*
Figure 1: Cross sections of the setups in the two different cases. Both cases relate to the same
(right hand Cartesian) coordinate system and rotation as shown on the far left. On the left side, the
channel, with two long shore boundaries and width (L*) that is taken to infinity. On the right the
‘shelf’ of finite width where the undisturbed depth (H*) vanishes as the free surface interacts with
the sloping bottom and a long shore boundary at the deep side only. In the former y* is defined
from the vanishing point of the undisturbed depth to the deep side wall (i.e. -H0/H'<y*<L*).
5

1.3 Observational background: The difference between a flat bottom flow and a slopping bottom flow in the
meso-scale (i.e. on the f-plane) was first observed by Hamon (1962). Hamon
analyzed daily sea surface height data measured by tide gauges on the east
Australian coastline (Sydney and Coff's Harbor) and in the deep sea (Lord Howe's
Island). The analysis revealed a low frequency, non hydrostatic, northward
propagating anomaly in sea surface height that appeared unique to the continental
slope (i.e. a wave traveling with the coastline on the left hand side in the southern
hemisphere). Repeating analysis from tide gauges records confirmed these results
in different locations of the world: Hamon (1966) in the west Australia coastline,
Mysak and Hamon, (1969) in the coast of north Carolina and Mooers and Smith
(1968) in the coast of Oregon (these waves are found to travel with the coast on
the right in the northern hemisphere).
The St. Kilda (Scotland) sea level and current records showed a tidal slot that
occupies long period oscillations (in the order of 10 days) that were found
consistent with the frequency peaks of continental shelf wave theory (Cartwright,
1969). The analysis of sea level data from tide gauges and currents record (from a
vertical set of three current meters) near the coast of Oregon showed high
agreement with dispersion relations given from numerical model (Cutchin and
Smith, 1973). The observed phase between the off shore velocity and the free
surface variation showed some consistency with those predicted by the numerical
model.
The observational research exists mainly in oceanography even though these
wave solutions apply in the atmosphere as well. The theoretical terminology of
shelf waves and channel waves is equivocally used in some of the reported
observations yet, the observational research refers to the natural setup and the
attribution to any of the theories (shelf or channel) that is subjected to the physical
structure that mandates the choice of assumptions in every case, is left mostly for
theoreticians.
6

1.4 Theoretical Background: The horizontal motion of incompressible thin layer of fluid with a free surface
can be described by a set of partial differential equations know as the Shallow
Water Equations. These equations are the result of applying the hydrostatic
approximation on the pressure gradient in the horizontal components of Euler's
equation for a thin rotating layer of fluid along with the equation of continuity as
the connection between the vertical displacement and the horizontal velocity
divergence. When the amplitudes are small the non-linear components of the
equation are neglected and the resulting equations are known as the Linear
Shallow Water Equations (hereafter 'LSWE').
In barotropic wave theories these equations often supply enough simplification
of the full equations of motion in order to present analytical solutions (in apposed
to baroclinic waves, from example, where the equations of motion are more
complicated and further simplification is needed). The LSWE are therefore
considered preferable compared with other (more crude) assumptions, for example
zero horizontal divergence (see Caldwell et al., 1972 for comparison). Only such
LSWE based theoretical results are reviewed in following subsections.
A. Channel: Exact numerical solution for low frequency waves in a channel with an
exponential bottom slope, Caldwell et al. (1972), show dispersion curves with
vanishing frequencies for very small and very large wavenumbers and a non-
vanishing maximal frequency for finite wavenumber in all modes. These waves
propagate with the shallow wall on their right for northern hemisphere and their
off shore amplitude is found different than harmonic.
In a channel with a linearly sloping bottom the existing analytical solutions for
TRW are derived by assuming the coefficient in the governing equation as
constant thus harmonic solution can be presented (e.g. Cushman-Roisin, 1994 and
Pedlosky, 1986). In order for the coefficient in governing equation to be constant
the depth must be taken as constant. Yet these wave solutions are a direct result of
the depth variations and hence the depth variations must be kept (a specific
derivation of this approximation will be shown in section 2.2-B of this work).
This representation of the depth variation is analogues to the one used to
represent the Coriolis parameter variation in the classical solution for the planetary
Rossby wave. Yet, in the planetary case it is found that when the variations of the
Coriolis parameter are retained everywhere in the governing equation the
7

solutions can significantly differ from the one obtained in the classical planetary
theory and the amplitude of these waves shows clear non-harmonic behavior, i.e.
trapped waves (Paldor et al. 2007).
Furthermore, in this case the governing equation can be approximated as the
Airy function and thus non-harmonic analytical solutions are presented (Paldor
and Sigalov 2007). These new solutions show higher accuracy in the dispersion
relation (compared with numerical solutions) as well as a non-harmonic structure
of the amplitude. It is reasonable to assume that a similar analysis used in the
topographic case can provide new insights regarding the nature of TRW as well as
some new analytical approximations.
B. Shelf: The waves that form on a shelf with the vanishing of the undisturbed depth
at the shallow side (also known as beach conditions) are termed 'Edge waves'. It is
common to divide these waves into high frequency waves (first class) and low
frequency waves (second class, also termed CSW, as will be used hereafter) in this
research only this second class edge waves are investigated.
Solutions for second class edge waves on an infinite shelf with a linear bottom
slope (Reid, 1958) reveal waves that propagate with the shoreline on the right in
the northern hemisphere (as TRW) yet their group velocity (unlike the one of
TRW) do not change its sign. The first mode (termed fundamental mode) has
increasing frequencies with increasing wavenumber and as a result are much
larger than the Coriolis parameter as wavenumber increases. The frequencies of
the other modes (termed quasi-geostrophic modes) are associated with high
vorticity and show asymptotic convergence into finite values as the wavenumber
increases. These values that are always smaller than the Coriolis parameter are a
function of the wave mode and the Coriolis parameter only. Their group-velocities
as a result converge to zero for large wavenumbers (hence energy is transferred in
long waves only).
On a shelf with finite width with a linear bottom slope the solutions for (long
shore) wave length that is larger than the shelf width reveals waves that propagate
in the same manner as those found on the infinite shelf (Reid, 1958), yet are non-
dispersive and their frequency is a function of the shelf width (see Robinson,
1964, who termed them as CSW). These solutions, when compared with
observational record (Hamon, 1962), showed qualitative accuracy only. Numerical
solutions of the finite shelf (Mysak, 1968) show that as the wave length deceases
8

the solutions behave more like those of the infinite shelf, meaning for large
enough long-shore wavenumber (short enough waves) the solution are
independent of the shelf width.
1.5 Experimental background (channel only): To the best of my knowledge laboratory experiments of low frequency
topographic wave are presented in a channel only (i.e. TRW), until the writing of
this work no documented experiments on a shelf (i.e. CSW) was found. The
analogy between TRW and planetary Rossby waves as was pointed out in the
theoretical review has been an important part of the motivation for the early
laboratory experiments. While the experimental generation of planetary Rossby
wave is a highly complicated (if possible) challenge the generation of TRW in a
laboratory is a strait forward experiment that can demonstrate a qualitative
verification of the potential vorticity based phenomena (both the planetary and the
topographic). One of such experiment (reported by Platzman, 1968) was taken in a
38cm wide flat-bottom annulus (outer radius of 80cm) when the effect of rotation on
the free surface produced a parabolic depth profile. The generated was done by
moving a radial obstacle in a tangential direction with respect to the rotating
system and the waves that formed behind the bump in the downstream direction
showed good qualitative resemblance to theory.
Experiments that were oriented towards TRW were performed in more
quantitative methods in order to be compared with theories, yet all were
performed with a non-linear bottom slope. Phillips (1965) presented a verification
of theory with laboratory experiments in which similar technique for depth
variation (forced by rotational effect on the free surface) was used. These
experiments (see also Ibbetson, 1967 for a more detailed review) were performed
in a 30cm wide annulus (L/Rd=0.28) with a fixed rotation speed for which the
parabolic free surface would be tangent to the bottom at the rotation axis if the
inner boundary was removed (mid value of the slope was about 0.2 and f=0.75s-1).
The former constraint that connects the Coriolis parameter to the depth variation
simplified the equations in such manner to allow the presentation of analytical
solutions. The waves were generated by using radial barrier that was made to
oscillate about its central vertical axis. The wave length was measured by streak
photography of the annulus with aluminum flake inserted to the water as tracers
9

and the phase speed was determined by the observed propagation of the wave with
respect to the time difference between two frames. For very small and very large
wavenumber the analytical theory showed very high accuracy compared with the
experiments, yet for the maximal values of frequency (that is mid-values of
wavenumber) the experimental data showed values about 30% larger than those
showed by the theory.
Caldwell et al. (1972) presented a more advanced experimental setup in an
annulus where the depth variation (exponential) were obtained by an actual
bottom slope (a negative exponential slope) followed by a flat bottom part
analogues to a continental margin. This bottom was installed in an annulus with
parabolic shape so that the parabolic free surface of the water (formed due to the
high speed rotation) was parallel to the flat bottom part. Two different channel
widths were tested: (1) 16cm ‘wide-channel’ with depth at the shallow side 0.6cm
(L/Rd=4.1), (2) 8cm ‘thin-channel’ depth at the shallow side not mentioned
(L/Rd≈1.1) in both cases f=6.28s-1. The wave generation was made by a paddle
moving in a radial direction pushing water up and down the slope and the
measuring of waves was made with the use of aluminum tracers and streak
photography of the annulus similarly to former experiments. The experimental
dispersion relation were compared with numerical solutions and showed very
good agreement in both thin and wide channels. The radial distances of the
maximal amplitude in the numerical solutions were compared with the location of
minimal motion in the experimental images and found to be in good agreement.
10

Chapter 2
Theoretical research
2.1 Formulation of the problem: Since the difference between the two cases lays in the boundary condition at
the shallow side of the domain the formulation of the wave equations prior to the
use of boundary conditions (hereafter B.C.) is common. For small amplitude,
undamped wave solution in a thin uniform rotating layer of fluid the equations of
motion can be reduced to the LSWE. Here x* and y* are defined as the long shore
and off shore coordinates respectively, u* and v* are the long shore and off shore
velocity components respectively and η* is the horizontal displacement of the free
surface from the mean height. The depth is defined as H*=H0+H'y, where H'
(positive constant) is the derivative of H* with respect to y*.
In a right hand Cartesian coordinate system these equations in their
dimensional form are as follow: **
** *
0u fv gt x
η∂ ∂− + =
∂ ∂ (1.1)
**
* *0v fu g
t yη∂ ∂
+ + =∂ ∂
* (1.2)
* * **
* * *0u v H vH
t x yη ⎛ ⎞∂ ∂ ∂ ′++ +⎜ ⎟∂ ∂ ∂⎝ ⎠
= (1.3)
In order to minimize the number of parameters in the equation system it is
customary to non-dimensionalize the variables. The depth is scaled by H0 (the
depth at y=0), the time is scaled by f -1 and the horizontal length is scaled by the
radius of deformation ( 0Rd gH= f ). By this scaling the non-dimensional form
of equation system (1) is written with the use of a single non dimensional
parameter δ:
0u vt x
η∂ ∂− + =
∂ ∂ (2.1)
0v ut y
η∂ ∂+ + =
∂ ∂ (2.2)
( )1 u vyt x yη δ
⎛ ⎞∂ ∂ ∂+ + + + =⎜ ⎟∂ ∂ ∂⎝ ⎠
0vδ (2.3)
11

Here the non-dimensional depth is written as H=1+δy and the new non-
dimensional parameter: 10H RdHδ −′= includes the depth scale the length scale
and the sloping of the bottom. With this choice of scaling the velocity is scaled
by 0gH , the phase speed of Kelvin waves at the shallow wall, hence the
frequency of TRW (ω=ck) is expected to be smaller than the order of unity.
Limiting ourselves to waves that propagate parallel to the shore we farther assume
a wave like dependence on the long shore direction for all three function, i.e.
u,v,η~exp(i(kx-ωt)) here k is the wavenumber, c is the phase speed and ω is the
frequency (ω=ck). This enables us to represent the temporal derivative and long-
shore spatial derivative as the frequency and wavenumber respectively. By
defining a complex function 1V ik −= , a non-complex system is obtained:
0c u V η⋅ − − = (3.1)
2 0u k c Vyη∂
− ⋅ + =∂
(3.2)
( ) ( )1 1 Vy u y V cy
δ δ δ η∂− + + + + + =
∂0 (3.3)
Equation (3.1) presents a simple algebraic connection between u,V and η thus
equations (3.2) and (3.3) can be reduced to a couple of first-order differential
equation for η,V only, hereafter the η,V equations:
21 1V k cy cη η∂ ⎡ ⎤= − + −⎢∂ ⎣ ⎦c ⎥
(4.1)
1 11 1
V c Vy c y c
δηyδ δ
⎡ ⎤ ⎡ ⎤∂= − + −⎢ ⎥ ⎢∂ + +⎣ ⎦ ⎣ ⎦
⎥ (4.2)
The η,V equations are the starting point for the numerical solutions and the
analytical approximations both in the channel and the shelf cases. In the channel
solutions can be found for these equations directly. In the shelf case these equation
present both a non-simple boundary condition and a singular behavior in the
shallow side and therefore cannot be numerically integrated without determining
the local behavior of the two eigenfunctions near the singular point.
12

2.2 The channel: A. Exact - Numerical results: The η,V equations in a channel with two B.C. for V
provided by the two walls is a well defined system that can be numerically
integrated given a normalization value for η at one wall. Since the V,η equations
present derivatives with respect to y only they can be numerically integrated as a
system of ordinary differential equations (ODE). Here the integration is performed
by using the BVP4C package in MATLAB with V=0 at the two walls and η=0.1
and the shallow side wall. The BVP4C package solves ODE as a boundary value
problem in a finite-difference collocation method (up to fourth order accuracy)
that is subjected to both B.C. at all times.
Solution are presented both by the value of the phase speed (c) and by plotting
the eigenfunctions (η and V). Three, well known, wave types are found in the
results: the non dispersive Kelvin wave, the dispersive high-frequency Poincare
waves and the dispersive low-frequency TRW. The identification of the wave type
(i.e. Poincare, Kelvin or TRW) is done according to the value of c, as was
mentioned in section 2.1, and the mode is determined by the number of zero
crossings of V. Since this study focuses on TRW the higher frequency shallow
water wave type that were found will not be shown. Numerical results of TRW are
shown in figure 2.
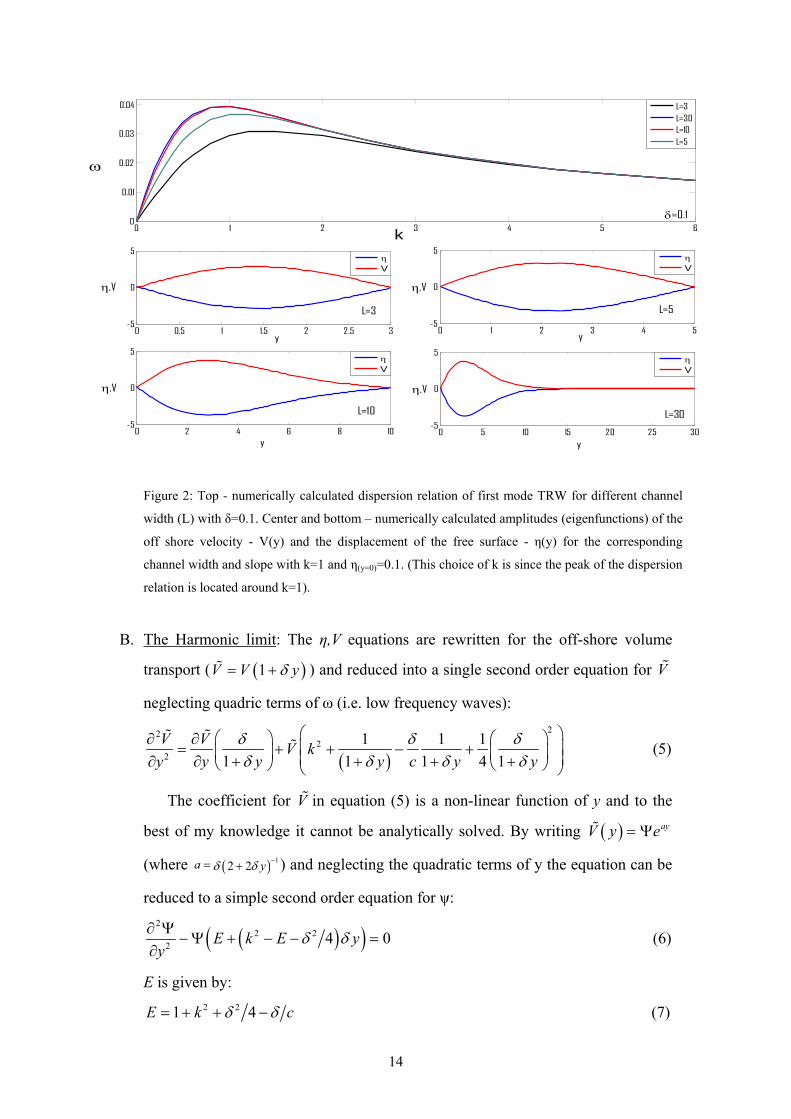
The dispersion relation for the indicated values (top panel of figure 2) clearly
shows that as L increases ω increases as well. Yet for L>10 ω is found to
converges to the same values (see the difference between the plots for L=10 (red)
and L=30 (blue) in the top panel). For L<10 the amplitudes of the eigenfunctions
are shown to be similar to harmonic with the maximal amplitude (and hence the
maximum of the energy) located in the center of the channel see the center left and
center right panels of figure 2. As L increases (L≥10) the amplitudes are shown to
be trapped against the shallow side wall with the location maximal amplitude
limited to y≈3 see figure 2, bottom right and left panels. These qualitative features
of the solutions are found consistent throw a verity of different values of δ and for
different wave modes and following these conclusions the different analytical
approximations for the V,η equations are examined.
13
0 1 2 3 4 5 60
0.01
0.02
0.03
0.04
0 0.5 1 1.5 2 2.5 3-5
0
5
0 2 4 6 8 10-5
0
5
y
0 5 10 15 20 25 30-5
0
5
0 1 2 3 4 5-5
0
5
ηV
ηV
ηV
ηV
L=3L=30L=10L=5
L=5
L=30
η,V
η,V η,V
y y
ω
L=3
L=10
y
δ=0.1
k
η,V
Figure 2: Top - numerically calculated dispersion relation of first mode TRW for different channel
width (L) with δ=0.1. Center and bottom – numerically calculated amplitudes (eigenfunctions) of the
off shore velocity - V(y) and the displacement of the free surface - η(y) for the corresponding
channel width and slope with k=1 and η(y=0)=0.1. (This choice of k is since the peak of the dispersion
relation is located around k=1).
B. The Harmonic limit: The η,V equations are rewritten for the off-shore volume
transport ( (1V V )yδ= + ) and reduced into a single second order equation for V
neglecting quadric terms of ω (i.e. low frequency waves):
( )
222
2
1 1 11 1 1 4 1
V V V ky y y c y yy
δ δδ δ δ
⎛ ⎞⎛ ⎞ ⎛ ⎞∂ ∂ ⎜ ⎟= + + − +⎜ ⎟ ⎜ ⎟⎜ ⎟∂ + + + +∂ ⎝ ⎠ ⎝ ⎠⎝ ⎠
δδ
(5)
The coefficient for V in equation (5) is a non-linear function of y and to the
best of my knowledge it cannot be analytically solved. By writing
(where
( ) ayV y e= Ψ
( ) 12 2a yδ δ −= + ) and neglecting the quadratic terms of y the equation can be
reduced to a simple second order equation for ψ:
( )(2
2 22 4E k E y
yδ δ∂ Ψ
−Ψ + − − =∂
) 0 (6)
E is given by: 2 21 4E k cδ δ= + + − (7)
14

Since the depth never vanishes in the channel a ≠−∞ the same vanishing
points (i.e. the same B.C.) apply for both ψ and . The elimination of quadric
terms in δy can be justified by the numerical results shown in figure 2, showing
that the eigenfunctions are limited to a small extant of the channel near the
shallow wall (i.e. near y=0).
V
The harmonic approximation of equation (6) can be obtained by eliminating
both δ2/4 and non constant term in the coefficient, resulting in a constant
coefficient equation. The general solution of this constant coefficient, governing
equation, is a linear combination of harmonic functions (sine and cosine). Given
the B.C. at the shallow wall the cosine function is rejected and given the B.C. at
deep side wall an equation for the phase speed is written, with the wave mode
(n+1) and channel width (L) introduced as parameters in the solution:
( )22 2 21 1k
k n L
δωπ
=+ + +
(8)
In order for the coefficient to be constant either δy must vanish or the
following condition must apply for the wavenumber: k2=δ2/2-(n+1)2π2/L2. In any
other wavenumber value only the vanishing of δy can yield this constant
coefficient approximation. In order for δy to vanish a very small slope and a very
narrow channel must be considered.
Equation (8) that is found in various text books (e.g. Pedlosky - 1982,
Cushman-Roisin – 1994) is the classical harmonic solutions for the dispersion
relation of TRW. Here n represents the number of nodal points (number of zero
crossing) of the velocity eigenfunction that is the wave's mode and it can be seen
that lower mode will have a higher phase speed. Figure 3 shows the dispersion
relation of TRW as calculated from equation (8) compared with the numerical
solution of the former section for various values of δ and L.
The sign of the phase speed resembles the sign of δ, hence for northern
hemisphere (f >0) these waves propagate in a long shore direction with the
shallow wall on the right hand side (and in with the shore on the LHS in the
southern hemisphere). It can be seen that for small δ and L (top left panel of figure
3) the harmonic approximation is good. When increasing δ (top right panel of
figure 3) the error increases, in this case about 60% of the numerical value. For
large values of both δ and L (both bottom panels) the error can increase up to the
order of 400% from the numerical value.
15

Equation (8) with the channel width taken to infinity for k=1 and n=1 the
dispersion relation tends to a value of 0.5.δ. For δ=2 this value approaches 1 (see
left bottom panel). As was shown earlier in figure 2, with increasing values of
channel width beyond 10 the numerically calculated dispersion relation is almost
unchanged hence the wide channel example bottom left panel of figure 3
approximately corresponds to the maximal error in this choice of δ.
0 1 2 3 4 5 60
0.01
0.02
0.03
0.04
0 1 2 3 4 5 60
0.05
0.1
0.15
0.2
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
HarmonicNumeric
HarmonicNumeric
HarmonicNumeric
HarmonicNumeric
k k
k
L=3δ=0.5
L=3δ=0.1
kL=5δ=1
L=20δ=2
ω
ωω
ω
Figure 3: A comparison between numerical solution (blue) and the harmonic approximation (red) for
the dispersion relation of first mode TRW for various values of δ and L as indicated in the RHS of
each panel.
The structure of the amplitude in the numerical solution is found to be similar
to harmonic for thin channels only, in wide channels the structure decays and
implies a non harmonic behavior of the eigenfunctions and hence the former
assumption that yielded a constant coefficient equation ( 0Lδ ≈ ) has a limited
level of accuracy and solution for the non constant coefficient equation, if exist,
might reveal different characters of the waves.
C. The Airy function solution: In the case of an infinitely wide channels harmonic
solutions which predicts that the waves must occupy the full width of the channel
(infinity in this case) are somewhat unaccountable. In this section a less crude
approximation for the coefficient in equation (6) will be presented in order to
derive non harmonic analytical solutions that might prevail in infinitely wide
channels. Since the coefficient in equation (6) is linear it is possible (following
16

Paldor and Sigalov, 2007) do define a new independent variable Z and to rewrite
equation (6) as: 2
2 ZZ
∂ Ψ= Ψ
∂ (9)
Here Z is defined as:
( ) ( ) ( )( )2 32 2 2 3 2 24 4Z y k E E k E yδ δ δ− −= − − + − − δ (10)
Equation (9) is the Airy function and its general solution is a linear
combination of two semi-harmonic functions Ai and Bi (see figure 4). Both
functions are oscillating on the negative part of Z axis while on the positive part Ai
is exponentially decaying and Bi is exponentially growing. The vanishing points
of Ai (marked as Zn) are an infinite set of irrational numbers and their asymptotic
approximation can be found in literature (Abramowitz and Stegun, 1972) the first
four shown in figure 4 are approximately Z0=-2.3811, Z1=-4.08795, Z2=-5.5205,
Z3=-6.7867.
-10 -8 -6 -4 -2 0 2 4 6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Z
Bi(z)
Ai(z)
Z0Z1Z2Z3
Figure 4: Solution of the Airy function. Both solutions are oscillating on the negative part of Z
axis. On the positive side Ai (in red) is decaying solution and Bi (in dashed blue) is growing. Since
only Ai is used in this study only the vanishing points of Ai are indicated.
When placing the shallow side wall of the channel at the nth vanishing point of
Ai (i.e. demanding Z=Zn when y=0) and the deep side wall far enough on the
positive of the Z axis, the contribution of Bi (the growing function) can be
neglected. Thus, analogues to the procedure made with harmonic functions in the
17

former section, here Bi is rejected by the B.C. and Ai alone is sufficient in order to
present an approximated solution. The far wall must lie at least at Z=4 in order to
allow the decaying of Ai to a negligible value (order of 10-8.Bi). By Neglecting E
with respect to k2 a simple formula for the phase speed for TRW is presented:
2 2 4 3 2 31 4 n
kk k Z
δωδ δ
=+ + +
(11)
Placing the nth vanishing point of Ai in equation (11) results in n zero crossing
point of the velocity function and represents the nth mode of the wave. From the
requirement of Ai<<Bi it is clear that a minimal channel width is necessary for the
applicability of this new solution, yet for any channel-width larger than this
threshold (even for an infinitely wide channel) the solution is the same. In the top
panel of figure 5 the numerical plots shown in section 2.2-A (figure 2 top panel
with δ=0.1) are compared with the Airy function solution for the infinitely wide
channel. It can be seen that as the channel width increase the numerical solution
are converging to the Airy solution. For L≥10 the difference is negligible. In the
bottom panel of figure 5 the same comparison is done for δ=2 it can be seen that
the maximal accuracy is less than the one obtained with δ=0.1, yet is still highly
accurate when compared with harmonic solution (see left bottom panel of figure 6
in this subsection).
0 1 2 3 4 5 60
0.01
0.02
0.03
0.04
L=3L=30L=10L=5Airy
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
L=3L=5L=10L=30Airy
k
δ=2
ω
ω
δ=0.1
Figure 5: Numerically calculated dispersion relation of first mode TRW in different channel
width (as indicated) and for two δ different values compared with the Airy function solution
(light green) for the corresponding slope values.
18

By placing equation (11) as the term for the phase speed in E the following
condition for E+δ2/4 to be negligible with respect to k2: k2»δ2/4-|Zn|k4/3δ2/3. In first
mode wave this condition apply k>0.01 when δ=0.1, for k>0.1 when δ=0.5, for
k>0.18 when δ=1 and k>0.35 when δ=2. Yet, this new formula for the dispersion
relation (equation 11), that is independent of the channel width, is equivalent to
taking the channel width to infinity and when compared with the expression that
result from the harmonic case for infinitely wide channel (i.e. equation 8
for ) it is much closer to the numerical values even in cases that do not
satisfy the above condition, see the bottom left panel of figure 6 with δ=2 and
wavenumbers smaller than the required value given by the above condition (in this
case 0.35).
L →∞
0 1 2 3 4 5 60
0.01
0.02
0.03
0.04
0.05
0 1 2 3 4 5 60
0.05
0.1
0.15
0.2
0 1 2 3 4 5 60
0.2
0.4
0.6
0.8
1
0 1 2 3 4 5 60
0.1
0.2
0.3
0.4
0.5
HarmonicNumericAiry
HarmonicNumericAiry
HarmonicNumericAiry
HarmonicNumericAiry
L=20δ=2
L=3δ=0.1
k k
ω ω
k
ω
L=5δ=1
k
L=3δ=0.5
ω
Figure 6: A comparison between numerical solution (blue) the harmonic approximation (red) and
the Airy-function approximation (green) of TRW for various values of δ and channel width.
Similarly for figure 3, with increasing channel width (L) the harmonic solutions increases the yet
the numerical solution is limited and the Airy function solution is independent of the channel's
width.
For first mode wave with k=1 and L taken to infinity, equation (11) tends to
the value of δ/(2+δ2/4+δ2/3|Zn|) and equation (8) in the harmonic case tends to a
value of δ/2. For small δ the difference is not large yet as δ increases the
difference increase significantly. For δ=1 the dispersion relation from equation
19

(11) is ω≈0.22, this value that is a good approximation for the numerical result
shown in the bottom right hand side of figure 6 (in blue) and is approximately a
half of the value that results from the harmonic theory (0.45). For δ=2 the solution
from equation (11) can be a less than third of the values given by the harmonic
theory (bottom left panel of figure 6).
Since the harmonic solution presented in equation (8) grows with increasing
channel width and the Airy function solution of equation (11) is invariant to
increasing channel width it is possible to find a critical channel width ( L ) for
which the two solutions converge. For channel width larger than L the harmonic
solution is larger in value and hence this equilibrium value is the minimal channel
width for which the Airy solution is a better approximation than the harmonic
solution. This threshold value, a function of the wave mode wavenumber and
slope, is given by:
( ) ( ) ( )1
2 4 3 2 21 4 nL y n Z kπ δ δ 3 −= + + (12)
0 2 4 6 8 10 12 14 16 18 20
-0.5
0
0.5
y
0 2 4 6 8 10 12 14 16 18 20-0.5
0
0.5
0 2 4 6 8 10 12 14 16 18 20-0.5
0
0.5
ηV
ηV
ηV
η, V
first mode
second mode
third mode
Figure 7: Numerically calculated vertical displacement (blue) and off-shore velocity (red)
amplitudes of TRW in a channel for the first three modes, L=20, k=1 and δ=0.5. The value of η at
the shallow side wall (y=0) is normalized as 0.1 at the first and third mode yet at -0.1 at the second
mode in order to present sign coherence in all profiles.
20

Since this value is a function of the wavenumber for any finite channel-width
there exist a small enough value of wavenumber for which the harmonic
approximation is better, for any larger value of wavenumber the Airy solution
prevails. The amplitude of the Airy-function solution (Ai) decays on the positive
side of Z, for all modes, faster than exponential decay. Hence the former analysis
mandates that: For a given wave mode, far enough from the shallow wall there
are no TRW in spit the presence of a sloping bottom! The energy (most of which is
in the lower modes) is trapped near the shallow wall. This character agrees well
with the numerically calculated amplitude presented for the first three modes, see
figure 7.
2.3 The shelf: In this section numerical solutions are presented in a similar manner as in the
former section and compared with asymptotic approximation for the infinite shelf
(Reid, 1958). The absence of a shallow wall implies that the depth scale is a
function of the slope (i.e. H0=(H')-1) and hence the slope and the channel width are
the only parameters that defines the physical setup (no depth scale exists in the
system). Since the long shore wave length must be measured by the channel width
it is expected that increasing the shelf width will be equivalent to increasing the
long shore wavenumber (k). By this it is clear that in any shelf width some
wavelength will be small enough in order for the shelf to be effectively infinite
(see figure 1 in Mysak, 1968).
A. Boundary conditions: The boundary conditions in the shelf present two obstacles
for the numerical integration of the η,V equations. First: in the absence of a wall at
the shallow side, demanding regularity on V at the shore line is the alternative
B.C. (e.g. LeBlond and Mysak 1978). Yet the η,V equations show irregular
behavior at that point dew to the vanishing of the undisturbed depth (i.e. placing
y=-δ-1 in equation 4.2). Second: at the shoreline the connection between V and η is
given as a function of the phase speed thus further complicating the numerical
integration. It was found best to define 1h yδ= + as the new independent
variable and rewrite the η,V equations for two new functions , 2V Vh= c hη η=
thus a new equation system is obtained:
21

2 2 1 1 22 k c hVh hη η
cδ δ⎡ ⎤∂ − ⎛= + ⎜⎢ ⎥∂ ⎝ ⎠⎣ ⎦
⎞− ⎟ (13.1)
2
2
2 2V h hVh c c
η 2δ δδ
⎡ ⎤∂= + −⎢∂ ⎣ ⎦
⎥ (13.2)
Here V is same function used in section 2.2-B and 2.2-C. In equation system
(13) both functions vanish at the shoreline dew to the vanishing of the undisturbed
depth and V vanish at the deep side wall dew to vanishing of V. The connection
between the two functions at the shoreline is independent of the phase speed. Yet
at the shoreline h vanishes as well and since one of the coefficients of η in
equation (13.1) is in the order of h-1 the behavior of the eigenfunctions at the
shoreline is not well defined.
B. Local behavior and numerical solutions: In order to numerically integrate equation
system (13) the behavior of both functions near of the shoreline must be analyzed.
By writing the functions as a two different power series expansions for h (i.e.
0 ,V V h h0α βη η∼ ∼ ) equation system (13) can be written as an indicial equation
system: 2 2
10 0 0
12 k ch V h hc
β α ββη η ηδ δ
− −⎡ ⎤−= + −⎢ ⎥⎣ ⎦
1 10
2 hβ + (14.1)
1 1 20 0 02
2 2 2V h V h h hc c 0
α α βα ηδ δ
βηδ
− + += + − (14.2)
For infinitesimally small values of h (i.e. h«1) components with higher order
of h are neglected and the simplified equation system presents two allowed
relations between α and β: (1) Equation (14.1) yields the condition β-1=α yet
when placed in equation (14.2) yields a trivial solution (α=0, β=1). (2) Equation
(14.2) yields the condition α-1=β, when placed equation (14.1) yields a non trivial
solution (α=2, β=1). Since in the former (non-trivial) solution both α and β are
larger than unity the behavior at the shoreline is regular. The indicial equation
(14.1) with the values of α and β given from (14.2) reveals the local behavior of
the two eigenfunctions near shoreline with the following relation:
( ) ( )11V h hδ η−= − 1 , see Bender and Orszag (1978) for a detailed review of this
technique.
Following this, equation system (13) can be numerically integrated in the same
technique used in the channel (given a normalization value for η near the
shoreline) yet here it is done from an infinitesimally small step from shoreline to
22

the deep side wall thus avoiding the singular point at the shoreline. The B.C.
applied for V are the local behavior near the shoreline normalized by the given
values of η and the vanishing at the deep side wall.
The numerical integration of equation system (13) shows two types of low
frequency waves that exist on the shelf both propagating with the shore on the
right (see figure 9 below). (1) A first mode wave with zero nodal points (black
line in figure 9) and frequency that is smaller than the Coriolis parameter for small
wavenumbers only yet increases and has non vanishing group velocity for large
value of wavenumber. (2) All other wave modes, with one or more nodal points
(red lines in figure 9) and frequencies converging to finite values (and vanishing
group velocities) as wavenumber increases. The second type that shows low
frequencies for all wavenumbers and is associated with high vorticity (Reid 1958)
is investigated here both numerically and experimentally.
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
2.5
3
X: 20Y: 0.324
X: 15Y: 0.195
k
n=0
n=1
ω
n=2
Figure 9: Numerically calculated dispersion relations of the first three modes of CSW, L=1, δ=0.5.
The fundamental mode (n=0) in black shows non decaying group velocity for large values of k
while the next two quasi-geostrophic modes shown here in red (n>0) have vanishing group
velocities for large values of k. The two data points presented on the n=1 and n=2 plots show the
value for which the frequency converges (indicated as Y axis values).
23

The dispersion relation of these waves is asymptotically approximated by Reid
(1958), these approximations rewritten for the scaling by which equation system
(4) is derived are as follows:
For large wavenumbers (k»δ)
12 1n
ω =+
(15)
For small wavenumbers (k«δ)
kω δ= (16)
Both equations (15) and (16) are approximations for infinite shelf yet they
show very high accuracy compared with the numerical solutions for a finite shelf
(see the indicated values in figure 9). For small wavenumbers the slope of ω as a
function of k (i.e. the group velocity) is given simply by δ. This value is consistent
with the numerical prediction as shown in the top panel of figure 10 (see the
dashed black line compared with the numerical solutions). It is found that as the
shelf width increases this asymptotic value given by equations (15) is found
consistent throughout larger values of wavenumbers as can be expected since the
shelf width is the only length scale and increasing it is equivalent to decreasing the
wavenumber.
0 5 10 15 20 25 30 35 400
0.1
0.2
0.3
0.4
δ=0.8δ=0.5δ=0.1
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
L=10L=5L=1
ω
k
ω
δ=0.5
L=1
Figure 10: Numerically calculated dispersion relation of the first quasi-geostrophic mode CSW on
a shelf for various values of non dimensional shelf width (top) and for various values of δ
(Bottom). The black dashed line in the upper panel indicates the asymptotically derived value for
small wavenumbers in the infinite shelf (Reid 1958) given in equation (16).
24

In the bottom panel of figure 10 it is shown that with increasing slope value
the group velocity for small wavenumbers increases, as predicted by equation
(16). As the wavenumber increases the frequency plot depart from asymptotic
solution given by equation (16) and converge to the infinite shelf approximation
for large wavenumbers given by equation (15).
25

Chapter 3
Laboratory experiments
3.1 General:
The experiments were funded by Hydra-Lab and performed at LEGI-Coriolis
laboratory (Grenoble, France) with the guidance and supervision of Professor Joel
Sommeria and with technical support of Henri Didelle and Samuel Viboud.
The concept of the experiments is based on observing the wavenumber as a
function of the frequency in appose to the theoretical section where the frequency
is a function of the wavenumber. This choice of observation is used since the
waves are forced in a variety of chosen frequencies on one side of the tank and
their wavenumbers are measured at the other. Only waves with frequencies and
corresponding wavenumbers that supply the B.C. can exist long enough in the
system and travel to the measurement area on the far side of the tank, all other
wave are quickly dumped. For the radius in the center of the slope (4.5m) these
waves travel some 15m half way around the tank.
When applying this observation in channel experiments some attention is
needed since ω as a function of k is a single value process yet k as a function of ω
is not necessarily a single value process meaning for each ω (except for the
maximal value) there are two possible values of k (this issue will be farther
discussed in section 3.2 B). In the shelf case k as a function of ω is a single value
process, see figure 7. Both the channel and the shelf experiments were performed
in the same physical setup and with the same wave generation, imaging and data
analysis techniques as will be described in the following subsections.
3.2 Physical setup and course of experiments: A. The tank: The experiments were performed in a cylindrical tank with a radius of
6.5m and a maximal depth of 1m (see figure 9). In the tank’s outer periphery a 4m
wide radial bottom slope of 10% is installed with the maximal depth in the center
hence the depth at the outer wall is reduced to 0.6m and the slope meets the flat
bottom at radius of 2.5m. In the center of the flat bottom area a cylindrical wall of
1m in radius is placed both for the laser system to be installed and as an inner B.C.,
thus creating a 5.5m wide annulus with 1.5m wide inner circle of flat bottom and a
26

4m wide sloping bottom outer circle. In the channel experiments the depth at the
outer wall is H0 used in the theoretical sections, controlling the radius of
deformation and hence the non dimensional channel width and δ. A shelf set up is
obtained by reducing the water level beyond the level of intersection between the
slope and the outer wall thus allowing the water surface to freely intersect with the
slopping bottom. The system is placed on a rotating platform of 14m in diameter
that is rotated counter clockwise with a controlled variable rotation rates and an
anti-precession system. The higher outer wall of the tank is isolated from the outer
air by heavy plastic curtains in order to minimize the movement of air relative to
the water surface. The curvature of the water surface due to rotation is of the order
of 2-5cm over the radius (6.5m) and is therefore neglected in all experiments.
Laser system
c
Wave maker
Laser sheet
Sloping bottom
Flat bottom
r
z
f
R=6.5
Motor
Figure 11: Radial cross section (left) and a horizontal upper view (right) of the experimental tank.
The sloping bottom part, flat bottom part and the inner wall can be seen on the left. The radial
motion of the wave maker up and down the slope (see LHS) generates the wave that travel
azimuthally parallel to the outer wall towards the measurement area indicated as 'laser sheet'
bounded in green (in the RHS). Both sketches are not to scale with the real system.
B. Wave generation technique: The waves are generated by displacing water in the
radial direction, following Caldwell et al. (1972), by the use of a heavy cylinder
that is embedded in the water and rolled up and down the slope. The water
columns that are pushed across the isobaths created a disturbance that propagates
along the isobaths around the tank to the measurement area (see RHS of figure
11). The cylinder is roller by using a 500HRZ electric motor (CEM 83V) with
frequency reduced by 480 (using two chain-sore wheel system). The motor
27

operated in a sinusoidal motion with the desired period and amplitude controlled
by LABVIEW software. As mentioned earlier in the channel case the wavenumber as a function of the
dispersion relation is not a single value process. In order to determine the
wavenumber both the location of the cylinder and the length are changed to fit as
best possible the corresponding numerical prediction for each case. Two cylinder
types are used: Long cylinder, 2m length and 20cm diameter and short cylinder of
40cm length and 15cm diameter. In two of the experiments a system of two short
cylinders, connected in the opposite manner to the motor and placed parallel yet
spaced on the slope is used in order to obtain a second wave mode (similarly to
Caldwell et al., 1972).
C. Wave imaging: The horizontal velocities of the water columns were measured by
the use of a Particle Imaging Velocimetry (PIV) technique. The PIV system is
consisted of three major elements: Photographic equipment an illuminating laser
sheet and particles inserted as tracers. The photography was made by using a wide
angel (17deg) Nikon D200 camera (10Mpix) positioned above the tank and covering
most of the laser sheet. The camera was controlled by Nikon software and a shot
was taken every five seconds. The Polystyrene (600μm) particles used as tracers
were adjusted to be slightly denser than the water by cocking and were distributed
in the water a short time before every experiment. The density difference is
needed in order to minimize the amount of surfacing particles that might drift due
to the air movement with respect to the water surface and damage the quality of
the results. Every 20 experiments the water was changed due to particles that sank
to the bottom.
The laser is generated with a Millennia 6W solid laser generator (532nm) and
the sheet is made by a 6850 – Cambridge technology mirror galvanometer (a
controlled rotating mirror) located in the center of the tank to created a 18° sheet
of laser in a desirable water depth. The laser frequencies were adjusted to the
exposure time of the camera in such way that at least two cycles of the laser were
completed in each exposure. All experiments were performed in the dark.
3.2 Images analysis: The analysis of the images from the digital images to the identification of the
period, wavenumber and amplitude was done by using 'UVMAT' a non-
28

commercial software developed by Professor Joel Sommeria of LEGI-Coriolis.
The software process the original images, produces vector fields of the velocity
and extract time series phase and amplitude of this velocity field as follows:
A. Velocity vector field: The unprocessed images are filtered from static pixels
(every 11 images) and converted to black and white format. Every sequential pare
of images is then interpolated to produce a single image (and data set) of the
velocity vector field. The software identifies particles by size and luminosity
characters in the first image and attributes them to particles with similar characters
in the next image thus pointing out the approximated displacement of particles
from one image to the other and producing a vector field. From the time gap
between two images the values of the velocity can be deduced. The velocity
vector fields are first cleaned from vectors with poor correlation and then
deformed (with some negligible inaccuracy) into Cartesian coordinates about a
distance of 4.5m from the center of the tank (i.e. the center of the slope) thus
converting the long shore wave length from radians to meters (see figure 12) and
the radial axis is now the equivalent to off-shore axis in the Cartesian system.
Figure 12: Velocity vector field (from exp. 16) as produced from cleaned analyzed and deformed
pare of sequential images the outer wall on the bottom appears as a strait line after deformation of
the original coordinates (it can be seen that the velocities decay at the outer wall). Since the vector
field is cleaned from vector with poor correlation some parts contain less information than others
(see coordinates (50-100) in the horizontal and (50-150) in the vertical in this image for example).
29

B. Period verification: From the Cartesian velocity fields of a full experiment time
series is made for either the off-shore or the long shore velocities in order to verify
the presence of the generated period. The time series of the velocity, taken in
selected spots of the frame that contained good quality of data, is filtered by using
a running average. In some experiments the observed period did not match the
generated period, that due to technical problems in the wave generation (probably
associated with friction the centrifugal force acting on the cylinder), yet data could
be extracted from some of these experiments based on the observed period
regardless of the generated period since the measured data contains both the
period and the wavenumber.
450 500 550 600 650
-0.1
-0.05
0
0.05
0.1
0.15
Frame number
V[pix/sec]
Figure 13: Time series (exp. 16) showing the off shore velocity vs. frame numbers at three
different points along the outer wall (see coordinates (100,-100) – red, (100,50) - green and
(100,200) – blue in figure 12). Inertial and super-inertial frequencies were filtered out by a
running average. The time step between two images is 5sec and a period of about 140sec can be
seen (28 images).
C. Phase and amplitude: From the observed period a phase and amplitude of the
velocity fields is extracted. The phase is found by multiplying the whole data set
(of either the off shore or long shore velocity) by the cosine of the observed
frequency and integrating over a full period (indicated as T in equation 17) thus
extracting the propagation (i.e. phase):
( ) ( ) ( ) ( ) ( )0 0 01cos cos cos cos 2 cos2 2T T T
Tt t dt dt t dtω ϕ ω ϕ ω ϕ⎛
+ = + + =⎜⎝ ⎠
∫ ∫ ∫ ϕ⎞⎟ (17)
30

Here ω is the frequency and φ - the phase of the disturbance is simply a linear
function of the long shore wavenumber (i.e. φ=kx) and hence its slope is the
wavenumber (k). By slicing the phase in the tangential direction (i.e. long shore
direction) the slope of the phase can be found. Matlab's curve fitting tool is used in
order to estimate the best linear-approximation of the slope and thus presenting
values of wavenumber corresponding to every frequency. In most cases few
values of wavenumber are found in each frequency hence the experimental value
are presented as error bars (see the results section of the chapter).
-100 -50 0 50 100 150
-150
-100
-50
0
50
100
150
200
250
-3
-2
-1
0
1
2
3
0 100 200 300 400 500-3.5
-2.5
-1.5
-0.5
0.5
1.5
2.5
3.5
x[cm] φ(x)
y[cm]
x[cm]
Figure 14: LHS – the phase of the off shore velocities (from exp. 16) showing values between
–π≤φ≤π, with the outer boundary on the right similarly to figure 13 (here the corresponding
Cartesian coordinates are shown: x – long shore and y – off shore). RHS - tangential slice
taken from the center of the diagram in of the long shore axis (indicated by the black dashed
rectangular in the LHS). The slope of the phase as presented in the LHS is the value of the
wavenumber. Since it is technically simpler to stretch a vertical line from top to bottom the
phase as presented on the RHS shows the propagation of the phase with the wall on the left.
The waves propagate with the wall on the right and hence the value of k is negative yet taken
as positive while presented.
The amplitude is found simply be taking the positive value from the square-
root of sum of square of the velocity field by components (long shore or off shore
velocities). By taking a radial 'sliced' of the data the radial structure of velocity
amplitudes can be presented (shown in the next subsection).
31

3.3 Experimental Results: Since the aim of experiments is to examine the accuracy of the theoretical
predictions for different choice of non-dimensional parameters, the values of the
dimensional parameters by which the scaling is made are of interest. In the
experiments it is possible to control the Coriolis parameter (0.411/s≥ f ≥ 0) and the
depth at shallow wall (0.6m ≥ H0 ≥0). In the shelf experiments it is possible to
change the Coriolis parameter and the shelf width (3.5m>L>0, less than 3.5m in
order to allow the free intersection of the water surface with the sloping bottom).
By changing these two it is possible to adjust the radius of deformation thus
changing δ and the non dimensional channel width (L/Rd). Yet, since both the
channel width and the δ are a function of the depth scale ( 1 2 1 20 0,H Rd Hδ −∼ ∼ )
the variety of possible combinations is limited (for example wide channel with
small δ could not be obtained). Since the experiments are taken in dimensional
parameters, the non-dimensional parameters in this section are presented as
dimensional divided by their scale (i.e. ω/f, L/Rd and k .Rd) in order to avoid any
confusion.
A. Channel: The channel experimental results are compared with the numerical
solution rather than directly with the analytic approximations since the laboratory
setup includes both a slope region and a flat bottom region. This setup mandates
the use of a more complicated B.C. at the deep side (the analytical solution of this
case is complicated the numerical solution is straightforward).
Two experimental channel-setups were tested the full list of experiments can
be found in appendix A. The first setup was taken in a thin channel with large
value of δ (L/Rd=0.88, δ=2.25) see figure 15 - top. The second in a wide channel
with larger δ (L/Rd=2.63, δ=3.8) see figure 15 - bottom. The non dimensional
wavenumbers (k .Rd) are presented as horizontal error bars presenting the mean
and variance of the values measured in every corresponding non dimensional
frequency (ω/f). Some experiments were performed with generated frequency that
is higher than the maximal frequency predicted by the numerical theory yet
showed no period, thought are indicated in red circles in figure 15.
32

0 1 2 3 4 5 6 7 80
0.1
0.2
0.3
0.4
0.5
0 2 4 6 8 10 120
0.05
0.1
0.15
0.2
0.25
0.3
k*Rd
ω*/f
ω*/f
δ=2.25L=0.88
δ=3.8L=2.63
Figure 15: A comparison between numerical (blue line) and experimental (black error-bars) results
for the dispersion relation of TRW in the two different setups. Top: thin channel (setup 1) with
L/Rd=0.88 and δ=2.25. Bottom: wide channel (setup 2) with L/Rd=2.63 and δ=3.8. Red circles
present experiments in which the generated periods is higher than the numerically predicted maximal
values and no waves are found.
Good agreement is found between the numerical prediction and the
experimental results both in the thin channel (figure 15 - top) and the wide
channel (figure 15 -bottom). The absence of results in the experiments where the
generated period exceeded the maximal value predicted by the numerical theory
indicate furthermore the accuracy of the numerical predications (harmonic theory
predicts the existence of TRW in such frequencies).
In the experiments the lack of data is equivalent to zero velocity. Such areas of
missing data were found almost in every experiment and therefore a complete
image of the off shore amplitude of the waves is rarely found. Yet, in some
channel experiments clear images of the amplitude were found two of such are
33

presented in figure 16. The point R=0 is defined manually in the extraction of
data from the experiment and it is different between the two images. The
amplitude is the square-root of sum of square of the velocity the numerical
solutions are presented as absolute values with the corresponding definition of the
off-shore axis in each of the two cases. The values of the velocities calculated
numerically are subjected to a normalization value at the shallow wall (i.e. η0, see
section 2.2-A) hence the magnitude of the velocity cannot be compared with the
experimental findings (the normalization values used in figure 16 were adjusted to
best fit the experimental value). The radial structure of the amplitude and in
specific the location of its maximal value is not subjected to the normalization and
is basis of comparison.
-300 -200 -100 0 100 200 3000
0.05
0.1
0.15
0.2
0.25
R (cm)
V (p
ix/se
c)
0 100 200 300 400 500 6000
0.005
0.01
0.015
0.02
0.025
0.03
V (p
ix/se
c)
first mode
second mode
Figure 16: Numerically calculated (blue line) absolute values of the off shore velocity amplitude
compared with experimentally (red doted line) measured amplitudes of the off-shore velocity
(experiment 45 - top and experiment 55 - bottom). The point R=0 is different between the two
plots due to differences in the process of data extraction yet the numerical solutions are plotted
accordingly.
Experiments 45 (figure 16 - top) is a first mode experiment in the wide
channel (L/Rd=2.63 δ=3.8, see setup 2 at appendix B). The radial structure of the
34

velocity shows clearly a trapped wave against the shallow wall. Experiment 55 is
a second mode experiment introduced in order to test the validity of the amplitude
structure of higher mode numerical solutions.
The second mode was obtained by connecting two short cylinders in an
opposite manner to the motor, those were placed parallel yet spaced on the radial
axis thus when one in moving off-shore the other is moving on-shore and vice
versa. The experimental data shows good accuracy in the location of maximal
values in the amplitude (see figure 16 - bottom) yet the relative size of the two
picks does not match the numerical prediction. This could indicate that some data
was lost in the outer (first) peak that is expected to be higher by the numerical
prediction yet is lower in the experimental data.
B. Shelf: Shelf experiments were performed in single setup due to the lack of time
yet since the dispersion relation for large wavenumbers is independent of the slope
value or shelf width and only the group velocity for small wavenumbers is altered
this single set up experiment is sufficient in order to produce a good examination
of the shelf solutions. The full list of experiments can be found in appendix B.
Since the derivation of the solutions in the shelf case is done with the
undisturbed depth as the independent variable one must assume the vanishing of
the eigenfunctions at the end of the slope. The experimental results, obtained in a
sloping bottom shelf followed by a constant depth, are compared with numerical
solutions for a shelf that ends in the end of the slope.
The radial velocity time series from shelf experiments did not show clear
indication of long periods and the generated periods were found in the tangential
velocity time series. From the tangential velocity field the phase was extracted in
the same manner as in the channel experiments and the comparison between the
numerically calculated and experimentally measured dispersion relation of CSW
are presented in figure 17 below. Good agreement is found between the numerical
solutions (blue line) and the experimental data (black error bars). The measured
values of frequency could not be explained by TRW theory since the values found
for k>2 are too high for TRW frequencies in the same parameters values. In
addition the error-bar that corresponds to ω=0.14 (experiment 72) present
measurements of waves that were generated by a short cylinder yet did not yielded
long wave that corresponds to the increasing frequency branch. The other
experiment with short cylinder showed no results. The decaying frequency branch
35

(that was found in the channel case) was not found here. Due to the small amount
of results the experiments can only support but not verify the different nature of
the dispersion relation of CSW from the one of TRW and more experimental data
is needed.
0 1 2 3 4 5 60
0.05
0.1
0.15
0.2
0.25
0.3
0.35
k*Rd
ω/f
δ=7L=0.85
Figure 17: A comparison between numerical results (blue line) and experimental results (black
error-bars) for the dispersion relation of CSW, δ=7 and L=0.85. The two left error-bars centered
at k*Rd=1.8 and k*Rd=2.8 presents value measured by long and short cylinders.
36

Chapter 4
Summery and discussion
This work presents both quantitative and qualitative results regarding the
nature of low-frequency topographic waves. Since any bottom slope (i.e. any
function) could be approximated as linear in its first order approximation the
linear slope used in this work allow a generalization of the conclusions to a wide
variety of setups (both natural and experimental).
The comparison between theoretical and experimental results shows that the
LSWE model is consistent for these long waves when the depth scale is in the
order of up to 15% from the wave length (see experiment 13.2, setup 1 in
appendix A with the mean depth being 40cm and the depth at the shallow wall is
20cm). Hence the assumptions used in the LSWE model: linearity, non viscous
flow and the hydrostatic approximation of the vertical displacement of the free
surface are somewhat justified.
In the channel, exact (numerical) solutions for TRW agree well with
laboratory findings in thin and wide channels, both in the dispersion relation and
in the radial (equivalent to off-shore in the Cartesian system) structure of the
amplitude. The dispersion curve given by the classical harmonic theory is found to
significantly differ from the numerical solution in cases of large slope values or in
wide channels. The non-harmonic analytical approximation is found to be a better
approximation than the classical solution in large slope values and in very wide
channels. In this solution the channel width is no longer a parameter, thus the
number of parameters in the problem is reduced into two (the depth at the shallow
wall and the slope value). The former conclusion is reinforced by the
experimentally measured amplitude in wide channels that shows trapped waves.
The methodology of representing the eigenfunctions of the (linearized)
coefficient in the governing equation as the Airy function and using the vanishing
points of Ai (the decaying solution of Airy function) as the location of one of the
two boundaries in the new coordinate is further reinforced by the experimentally
verified numerical solution in this work (the same technique was used earlier in
Paldor and Sigalov, 2007 and De-Leon and Paldor, 2009 – in submission). A
contradiction might be found in this formulation of eigenfunction since it is based
on assuming δ2y2«1 while L is taken to infinity and δ does not vanishes. Yet, as
37

shown by the numerically calculated amplitudes (figure 7) the waves do not
occupy the full width of the channel and the effective channel width is always
finite hence in some range of parameters the quadric terms could be neglected.
Furthermore when compared with the harmonic solution, this Airy-like solution is
found preferable throw a wide verity of parameter values.
The length scale that defines this harmonic and the non-harmonic regime
allow the reader to wisely choose between the harmonic and the non harmonic
analytical theories in order to describe as best possible the dispersion relation of
TRW by the use of a simple formula. The direct comparison between the
experimental findings and the analytical solutions could not been made since in
the experiment the slope did not occupy the full width of the channel and since the
variety of parameters is limited. Farther experimental research, in different setup
and with larger variety of parameters might supply such direct comparison.
In the shelf case, the experimental generation and observation of CSW (the
low frequency class of edge waves) was successful by the same techniques used in
this work and in previous works for the generation and observation of TRW, yet
the generated period was significantly clearer in the tangential velocity field. The
experimentally measured dispersion relation showed good agreement with the
numerical solutions for shelf of finite width. These numerical solutions confirm
the two asymptotic expressions for the dispersion relation (for large and for small
wavenumbers) presented by Reid (1958) yet farther experimental findings are
needed in order to verify the accuracy of Reid's asymptotic solutions in a larger
variety of parameters and in other (higher) wave modes.
Both the numerical and experimental results indicated that the dispersion
relation of TRW is different than the one of CSW. While TRW dispersion relation
has a maximal value for finite wavenumber and it group velocity changes it sign
about that value, the dispersion relation of CSW converges to a finite value with
increasing wavenumbers. These results arises the conclusion that the fundamental
change in the nature of the dispersion of the two wave types is a result of the
existence/absence of a boundary at the shallow side. Further reinforcement of this
conclusion can be found when taking H0 to zero in the dimensional form of either
equation (7) or (11), for finite wavenumbers both yield the corresponding
asymptotic relation given by Reid (1958) see equation (15).
38

Bibliography
Abramowitz, M., and I. A. Stegun, 1972: Handbook of mathematical functions.
Dover Publications, Inc., NY, USA, 1043 pp.
Bender, C. M., and S. Orszag, 1978: Advanced mathematical methods for
scientists and engineers. McGraw-hill Book Company, Inc. 593 pp.
Caldwell, D. R., D. L. Cutchin, and M. S. Longuet-Higgins, 1972: Some model
experiments on continental shelf waves. J. Marine. Res., 30, 38-55.
Cartwright, D. E., 1969: Extraordinary tidal currents near St. Kilda. Nature, 223,
928-932.
Cushman-Roisin, B., 1994: Introduction to Geophysical Fluid Dynamics.
Prentice-Hall, Eaglewood, 320 pp.
Cutchin, D. L., and R. Smith, 1973: Continental shelf waves: Low-frequency
variations in sea level and currents over the Oregon continental shelf. J. Phys.
Oceanogr., 3, 73-82.
De-Leon, Y., and N. Paldor, 2009: Linear wave in Mid-latitudes on the rotating
spherical Earth. J. Phys. Oceanogr., in submission.
Hamon, B. V., 1962: The spectrum of mean sea level at Sydney, Coff's Barbour
and Lord Howe Island. J. Geophys. Res., 67, 5147-5155.
Hamon, B. V., 1966: Continental shelf waves and the effect of atmospheric
pressure and wind stress on the sea level. J. Geophys. Res., 71, 2883-2893.
Ibbetson, A., and N. Phillips, 1967: Some laboratory experiments on Rossby
waves in a rotating annulus. Tellus, 19, 81-87.
LeBlond, P.H., and L.A. Mysak, 1978: Waves in the Ocean. Elsevier
Oceanography Series, Amsterdam, the Netherlands, 602 pp.
39

40
Mooers, C. N. K., and R. L. Smith, 1968: Continental shelf waves off Oregon. J.
Geophys. Res., 73, 549-557.
Mysak, L.A., 1968: Edge-waves on a continental shelf of finite width. J. Marine.
Res., 26(1), 25-33.
Mysak, L. A. and B. V. Hamon, 1969: Low frequency sea level behavior and
continental shelf waves off North Carolina. J. Geophys. Res., 74, 1397-1405.
Paldor, N., S. Rubin, and A. J. Mariano, 2007: A consistent theory for linear
waves of the Shallow-Water equation on a rotating plane in midlatitudes. J.
Phys. Oceanogr., 37, 115-128.
Paldor, N., and A. Sigalov, 2008: Trapped waves on the mid-latitude \beta-plane.
Tellus A, 60(4), 742-748.
Pedlosky, J., 1986: Geophysical Fluid Dynamics. 2nd Ed. Springer-Verlag, 710
pp.
Phillips, N. A., 1965: Elementary Rossby waves. Tellus, 17, 295-301.
Platzman, G. W., 1968: The Rossby wave. Quar. J. Met. Soc., 94, 225-246.
Reid, R.O., 1958: Effect of Coriolis force on edge wave (I) investigation of the
normal modes. J. Mar. Res., 16, 109-144.
Robinson, A. R., 1964: Continental shelf waves and the response of the sea
level to weather systems. J. Geophys. Res., 69, 367-368.

Appendix A: Set up 1, channel: H0=0.2m, g=9.81m/s
2, f=0.31s-1, slope=0.1
Rd=4.51m, δ=2.25 Table 1
Exp. setup Exp. Number
Date Time
Cylinder type long/short
Amplitude [m]
Generated frequency ω
Observed frequency (if different)
Measured wave number [m-1] with indicated frame numbers
Remarks
Setup 1 10 14.4.08 9:00 Long 0.5 0.031 0.031 2.1, 2.32 Setup 1 11 14.4.08 8:00 long 0.5 0.0434 non Non Setup 1 12 16.4.08 11:00 long 0.05mistake 0.0496 0.0496 1.25 (184-284)
1.184 (284-385) 1.2 (84-185)
Setup 1 13 16.4.08 12:50 long 0.5 0.0558 non Non – technical problem Setup 1 13-A 16.4.08 16:20 long 0.5 0.0558 0.0354 3.59 2.49 1.69 (973-1025) Setup 1 14 16.4.08 17:40 long 0.25 0.0682 0.035 2.09 1.9 (1701-1774) The period was
measured in the beginning of the experiment only and was different from the generated one
Setup 1 15 16.4.08 19:00 long 0.25 0.0806 non non Setup 1 16 16.4.08 11:00 long 0.5 0.0434 0.045
0.0437 0.0412
1 (3693-3754) 1.01(4105-4134),1.18(3933-4094) 1.01 (3883-3944),1.3 (3733-3782)
* Experiment 13-A is repeating experiment 13 that failed due to technical problems.
41

Set up 2, channel: H0=0.04m, g=9.81m/s
2, f=0.41s-1, slope=0.1
Rd=1.52m, δ=3.8
Exp. setup Exp. Number
Date Time
Cylinder type long/short
Amplitude [m]
Generated frequency ω [1/s]
Observed frequency
Measured wave number [m-1] with indicated frame numbers
Remarks
Setup 2 41 28.4.08 12:34 long 0.2 0.082 0.082 0.45, 0.55, 0.5 (19458-19519) 0.539, 0.35, 0.5 (19612-19673)
Setup 2 42 28.4.08 14:50 long 0.1 0.09 0.09 0.41, 0.59, 0.855 (20225-20364) Setup 2 42-A 28.4.08 14:12 long 0.1 0.09 0.09 0.48, 0.328 (19985-20086) Setup 2 43 28.4.08 15:20 long 0.1 0.0984 0.0984 0.309, 0.33 (20924-20972) Setup 2 44 28.4.08 16:51 long 0.1 0.106 0.106 0.65 (21432-21467)
0.585 (21337-21362)
Setup 2 44-A 28.4.08 17:56 long 0.2 0.106 0.108 0.0837
3.51,2.09,1.84,1.29 (22157-22169) 1.79, 2.19, 2, 4, 2.89, 4.34, 4.19
Setup 2 45 29.4.08 11:43 long 0.1 0.1107 0.096 0.089 0.089
2.5, 2.39, 2.19 (23172-23208) 4.09, 3.6, 2.5 (23209-23234) 2.59, 2.29, 2.19,2.89 (23177-23190)
Setup 2 46 30.4.08 09:52 short 0.1 0.0492 non Non Setup 2 47 29.4.08 11:02 short 0.1 0.123 non non Setup 2 48 29.4.08 12:32 short 0.1 0.1025 0.1025
0.1025 0.0966
0.44 (23930-23959) 0.61, 0.486, 0.619 (23943-24007) 2, 2.29 (end of exp)
Setup 2 49 29.4.08 13:40 short 0.1 0.1312 non non Setup 2 50 30.4.08 10:44 short 0.2 0.0574 0.04 2.69, 2.89 (26293-26344) Setup 2 51 30.4.08 11:50 short 0.2 0.0656 non Non Setup 2 52 30.4.08 12:30 short 0.2 0.0738 non Non Setup 2 53 30.4.08 13:54 short 0.1 0.09 0.236 0.65 (28223-28264)
0.55 (28214-28257)
Setup 2 54 30.4.08 14:36 short 0.1 0.106 non Non Setup 2 55 30.4.08 16:09 short 0.2 0.0492 0.0492 0.76, 0.59, 0.66 (29370-29424)
0.62 (full series) Second mode
Setup 2 56 30.4.08 17:17 short 0.2 0.0328 non Non *In exp. 42-A and exp. 44-A experiments 42 and 44 respectively are repeated since the later two were short in time.
42

43
Appendix B: Set up 3, shelf: H0=0.05m, g=9.81m/s
2, f=0.2s-1, slope=0.1
Rd=3.53m, δ=7.
Exp. setup Exp. number
Date Time
Cylinder type long/short
Amplitude [m]
Generated frequency ω [1/s]
Observed frequency (if different)
Measured wave number [m-1] with indicated frame numbers
Remarks
Setup 3 17 18.4.08 14:17 Long 0.02 3 non Non Setup 3 18 18.4.08 17:38 long 0.5 0.028 0.028 0.2, 0.25, 0.22, 0.26 Setup 3 19 21.4.08 11:00 long 0.25 0.02 0.0208 0.27 (6369-6641)
0.2, 0.22, 0.23 (6432-6868)
Setup 3 20 21.4.08 12:42 long 0.25 0.056 0.056 0.75, 0.9 (6953-7341) Setup 3 21 21.4.08 13:50 long 0.05 non non Setup 3 70 30.4.08 20:28 long 0.2 0.062 non non Technical problems Setup 3 72 30.4.08 19:27 short 0.2 0.066 0.045 0.48, 0.437, 0.62 (31501-31608) Setup 3 73 30.4.08 18:42 short 0.2 0.067 0.105 non

:תקציר
תעלה ) 1: (נחקרים בשתי מקרים שונים f- במישורי ליניארגלים נמוכי תדירות בנוכחות שיפוע קרקעית
מדף בעל רוחב סופי בו פני המים ) 2. (סופי- כאשר רוחבה גדול עד אין)תנאי שפה (עם שני קירות
מודל המבוסס . קיים בצד העמוק בלבד)תנאי שפה (פוגשים את הקרקעית המשופעת בצד הרדוד וקיר
על משוואות המים הרדודים הליניאריות נפתר עבור כל אחד מהמקרים ונבדק לאור תוצאות ניסויי
.מעבדה
מראים גלים שמתקדמים עם הצד הרדוד מימין בהמיספרה , בשני המקרים, םיפתרונות נומרי
גל קטנים מספיק וגדולים מספיק ובעל ערך -יחס הנפיצה מתאפס עבור מספרי, בתעלה. הצפונית
ערכי התדירות נמצאו שונים מאלו המתקבלים מהתיאוריה . גל סופי-מקסימאלי של תדירות במספר
במקרים של תעלה מאוד רחבה או , )Pedlosky, 1986(רמוניים הקלאסית המבוססת על פתרונות ה
גל קטנים מספיק אך שואפת - תדירות שמתאפסת עבור מספריםבמדף יחסי הנפיצה מראי. שיפוע גדול
פתרונות אלו נמצאו עקביים עם . גל גדולים מספיק-עבור מספרי) הקטן מפרמטר קוריוליס(לערך קובע
).Reid, 1958(סופי -אין עבור מדף םמפטוטייפתרונות אס
LEGI-Coriolis - ב'מ13 מסתובב בקוטר מיכל מעגלישני המקריים נבדקו במעבדה במשטח
PIV באמצעות טכניקת והגלים נצפים 10%הוא של ) ליניארי(במעבדה השיפוע בקרקעית . בצרפת
)Particle Imaging Velocimetry .(מבנה הן עבור יחסי הנפיצה הן עבור, תוצאות המעבדה
מראים התאמה טובה עם פתרונות נומריים לקיר הרדוד/ בניצב לחוף)משרעתה(הפונקציות העצמיות
שעבור תעלה רחבה בבירור תעלה עולה במתוצאות הניסויים . בתעלה ובמדףבפרמטרים המתאימים
. מוגבלת לאזור צד סמוך לקיר הרדודמשרעתמספיק ה
ת המבוססת על קירוב הפונקציות העצמיות באמצעות בתעלה יחסי הנפיצה נתונים בנוסחה מקורב
תוך התאמה טובה לתוצאות נומריות במקרים של תעלה רחבה מאוד ושיפוע קרקעיות Airyמשוואת
בתעלה רחבה , עבור של שיפועקובעים ש) סופי-שמתאימים גם לתעלה ברוחב אין(פתרונות אלו . גדול
שאינו פרמטר ביחס , התעלהה שלידעכו בשאר רוחבוד הגלים יאכלסו אזור צר סמוך לקיר הרדומספיק
שמפרידה בין התחום עבור התעלה סקאלת רוחב ) בנוסחא פשוטה(נתונה , בנוסף. הנפיצה של הגלים
כפונקציה של ) Airyבו מתאימים הפתרונות המבוססים על משוואות (הרמוני -ההרמוני לתחום הלא
. אופן התנודהמספר הגל השיפוע ו
xliv

האוניברסיטה העברית בירושליםThe Hebrew University of Jerusalem
הפקולטה למתמטיקה ולמדעי הטבע
המכון למדעי כדור הארץ על שם פרדי ונדין הרמן
על שם קרן משפחת רינגהאטמוספירההמחלקה למדעי
ניסויים מעבדה ותיאוריה קונסיסטנטית
לגלים נמוכי תדירות בנוכחות שיפוע
f - במישוריקרקעית ליניאר
עבודת גמר לשם קבלת תואר מוסמך
:מגיש ר כהןיאי
03645997. ז.ת
:בהדרכת
פרופסור נתן פלדור
ט"שבט תשס
2009פברואר