kinematyka, dynamika, elementy szczególnej teorii względnościjacekp/aei/inf/wyklad_aei_2.pdf ·...
TRANSCRIPT

Kinematyka,Dynamika,
Elementy Szczególnej Teorii WzględnościFizyka – wykład 2dla studentów kierunku
InformatykaWydział Automatyki, Elektroniki i Informatyki
Politechnika Śląska
Jacek Pawlyta
15 października 2007r.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu bez uwzględniania przyczyn ruchu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Kinematyka – opis ruchu
równanie toru – równanie opisujące ślad jaki ciało zakreśla wprzestrzeni,
f (x , y , z)
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
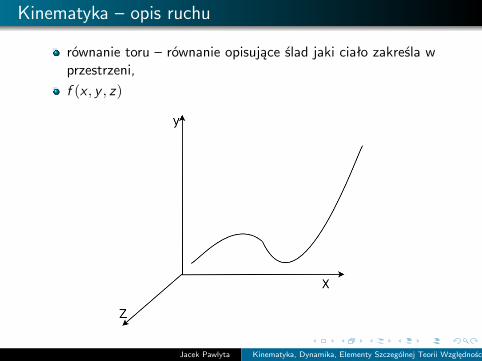
równanie toru – równanie opisujące ślad jaki ciało zakreśla wprzestrzeni,
f (x , y , z)
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Kinematyka – opis ruchu
równanie toru – równanie opisujące ślad jaki ciało zakreśla wprzestrzeni,
f (x , y , z)
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
równanie ruchu – zależność położenia w przestrzeni od czasu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
równanie ruchu – zależność położenia w przestrzeni od czasu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
równanie ruchu – zależność położenia w przestrzeni od czasu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – opis ruchu
równanie ruchu – zależność położenia w przestrzeni od czasu
f (t), x(t), y(t), z(t)
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Kinematyka – prędkość
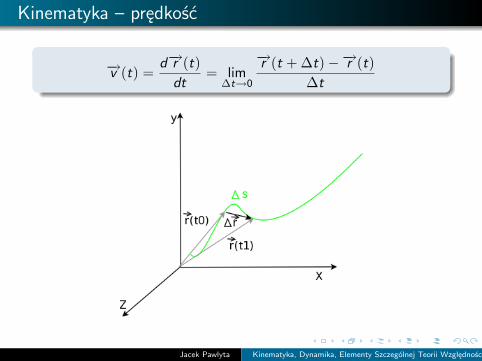
−→v (t) = d−→r (t)dt
= lim∆t→0
−→r (t +∆t)−−→r (t)∆t
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Kinematyka – prędkość kątowa
−→ω (t) = d−→ϕ (t)dt
= lim∆t→0
−→ϕ (t +∆t)−−→ϕ (t)∆t
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
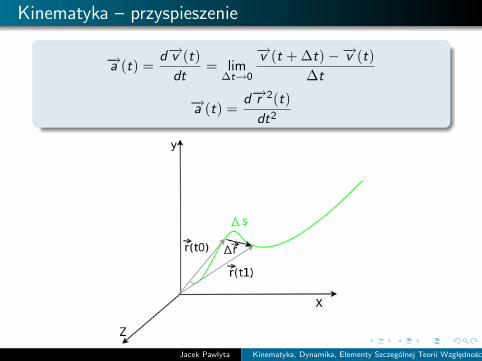
Kinematyka – przyspieszenie
−→a (t) = d−→v (t)dt
= lim∆t→0
−→v (t +∆t)−−→v (t)∆t
−→a (t) = d−→r 2(t)dt2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Kinematyka – przyspieszenie kątowe
−→ε (t) = d−→ω (t)dt
= lim∆t→0
−→ω (t +∆t)−−→ω (t)∆t
−→ε (t) = d−→ϕ 2(t)dt2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny (prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny (prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny
(prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny (prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny (prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny (prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny (prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny
(prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Kinematyka – klasyfikacja ruchów
jednostajny (prostoliniowy, po okręgu)
−→v (t) = const
−→ω = const
jednostajnie zmienny (prostoliniowy, po okręgu)
−→a (t) = const
−→ε = const
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Dynamika – uwzględnienie sił działających na ciała i będącychprzyczynami powstania ruchu, bądź zmiany ruchu
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona
−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0
=⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona
−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0
=⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0
−→a =−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona
−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A
=⇒−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B
−→F A =
−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika – zasady dynamiki Newtona
I zasada dynamiki Newtona−→F = 0 =⇒ −→a = 0
II zasada dynamiki Newtona−→F 6= 0 =⇒ −→a 6= 0−→a =
−→Fm
III zasada dynamiki Newtona−→F A =⇒
−→F B−→
F A =−→F B
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Układ inercjalny (galileuszowski) – poruszający się względeminnego układu ruchem jednostajnym prostoliniowym.
Względność ruchu – dla układów inercjalnych nie ma możliwościstwierdzenia, który znajduje się w ruchu, a który nie!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Układ inercjalny (galileuszowski) – poruszający się względeminnego układu ruchem jednostajnym prostoliniowym.Względność ruchu – dla układów inercjalnych nie ma możliwościstwierdzenia, który znajduje się w ruchu, a który nie!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Układ inercjalny (galileuszowski) – poruszający się względeminnego układu ruchem jednostajnym prostoliniowym.Względność ruchu – dla układów inercjalnych nie ma możliwościstwierdzenia, który znajduje się w ruchu, a który nie!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Układ inercjalny (galileuszowski) – poruszający się względeminnego układu ruchem jednostajnym prostoliniowym.Względność ruchu – dla układów inercjalnych nie ma możliwościstwierdzenia, który znajduje się w ruchu, a który nie!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Transformacja Galileusza
x = x ′ + v · t,y = y ′,z = z ′.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Transformacja Galileusza
x = x ′ + v · t,y = y ′,z = z ′.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Transformacja Galileusza
prędkość światła
Obserwacje obiektów poruszających z prędkościami zbliżonymi doc nie zgadazają się z przewidywaniami transformacji Galileusza!
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Postulaty1 Prędkość światła w próżni jest taka sama we wszystkichukładch inercjalnych i nie zależy od ruchu źródła światła.
Jest to graniczna prędkość przekazywania sygnałów(informacji) i poruszania się cząstek.
2 Wszelkie prawa fizyki są identyczne we wszystkich inercjalnychukładach odniesienia.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Szczególna Teoria Względności
Postulaty1 Prędkość światła w próżni jest taka sama we wszystkichukładch inercjalnych i nie zależy od ruchu źródła światła.Jest to graniczna prędkość przekazywania sygnałów(informacji) i poruszania się cząstek.
2 Wszelkie prawa fizyki są identyczne we wszystkich inercjalnychukładach odniesienia.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Postulaty1 Prędkość światła w próżni jest taka sama we wszystkichukładch inercjalnych i nie zależy od ruchu źródła światła.Jest to graniczna prędkość przekazywania sygnałów(informacji) i poruszania się cząstek.
2 Wszelkie prawa fizyki są identyczne we wszystkich inercjalnychukładach odniesienia.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Konsekwencje1 Dylatacja (wydłużenie) czasu
∆t = ∆t′√1− v2c2
2 Kontracja (skrócenie) długości
l = l0 ·√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Konsekwencje1 Dylatacja (wydłużenie) czasu∆t = ∆t′√
1− v2c2
2 Kontracja (skrócenie) długości
l = l0 ·√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Konsekwencje1 Dylatacja (wydłużenie) czasu∆t = ∆t′√
1− v2c2
2 Kontracja (skrócenie) długości
l = l0 ·√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Konsekwencje1 Dylatacja (wydłużenie) czasu∆t = ∆t′√
1− v2c2
2 Kontracja (skrócenie) długości
l = l0 ·√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Transformacja Lorentza
x =x ′ + v · t√1− v2c2
y = y ′
z = z ′
t =t ′ + v · x ′/c2√1− v2c2
x ′ =x − v · t√1− v2c2
y ′ = y
z ′ = z
t ′ =t − v · x/c2√1− v2c2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Interwał czasoprzestrzenny
s =√(x ′ − x)2 + (y ′ − y)2 + (z ′ − z)2 − c2(t ′ − t)2
s2 < 0 – interwał czasowy,s2 > 0 – interwał przestrzenny.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Interwał czasoprzestrzenny
s =√(x ′ − x)2 + (y ′ − y)2 + (z ′ − z)2 − c2(t ′ − t)2
s2 < 0 – interwał czasowy,s2 > 0 – interwał przestrzenny.
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Relatywistyczne dodawanie prędkości
v = v ′+v ′′
1+ v′·v′′c2
v <<< c ?
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Szczególna Teoria Względności
Relatywistyczne dodawanie prędkości
v = v ′+v ′′
1+ v′·v′′c2
v <<< c ?
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Masa reletywistyczna
m = m0√1− v2c2
Pęd relatywistyczny
p = m · v p = m0√1− v2c2
· v
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności
Dynamika relatywistyczna
Masa reletywistyczna
m = m0√1− v2c2
Pęd relatywistyczny
p = m · v p = m0√1− v2c2
· v
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Energia całkowita
E = m · c2
E = m0√1− v2c2
· c2
Energia spoczynkowa
E0 = m0 · c2
Energia kinetyczna
Ek = E − E0można pokazać (rozwijając 1− (v/c)2 w szereg), że dla v <<< cEk = m·v
2
2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Energia całkowita
E = m · c2E = m0√
1− v2c2
· c2
Energia spoczynkowa
E0 = m0 · c2
Energia kinetyczna
Ek = E − E0można pokazać (rozwijając 1− (v/c)2 w szereg), że dla v <<< cEk = m·v
2
2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Energia całkowita
E = m · c2E = m0√
1− v2c2
· c2
Energia spoczynkowa
E0 = m0 · c2
Energia kinetyczna
Ek = E − E0można pokazać (rozwijając 1− (v/c)2 w szereg), że dla v <<< cEk = m·v
2
2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności

Dynamika relatywistyczna
Energia całkowita
E = m · c2E = m0√
1− v2c2
· c2
Energia spoczynkowa
E0 = m0 · c2
Energia kinetyczna
Ek = E − E0można pokazać (rozwijając 1− (v/c)2 w szereg), że dla v <<< cEk = m·v
2
2
Jacek Pawlyta Kinematyka, Dynamika, Elementy Szczególnej Teorii Względności