eric prebys, fnal. we will tackle accelerator physics the way we tackle most problems in classical...
TRANSCRIPT

Transverse Motion 1Eric Prebys, FNAL

The Journey Begins… We will tackle accelerator physics the way we
tackle most problems in classical physics – ie, with 18th and 19th century mathematics! Calculate ideal equilibrium trajectory Use linear approximations for deviations from this
trajectory Solve for motion Treat everything else as a perturbation to this
As we discussed in our last lecture, the linear term in the expansion of the magnetic field is associated with the quadrupole, so let’s start there…
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 2

Quadrupole Magnets*
A positive particle coming out of the page off center in the horizontal plane will experience a restoring kick
xB
y
yB
x
)()(
)(
B
lxB
B
lxBx
lB
Bf
'
)(
*or quadrupole term in a gradient magnetUSPAS, Knoxville, TN, Jan. 20-31, 2014 3Lecture 3 - Transverse Motion 1

What about the other plane?
pairs give net focusing in both planes -> “FODO cell”
xB
y
lB
Bf
'
)(
Defocusing!
Luckily, if we place equal and opposite pairs of lenses, there will be a net focusing regardless of the order.
USPAS, Knoxville, TN, Jan. 20-31, 2014 4Lecture 3 - Transverse Motion 1

Transfer matrices
The simplest magnetic lattice consists of quadrupoles and the spaces in between them (drifts). We can express each of these as a linear operation in phase space.
By combining these elements, we can represent an arbitrarily complex ring or line as the product of matrices.
)0('
)0(1
101
')0(1
)0(''
)0(
x
x
fx
x
xf
xx
xx
)0('
)0(
10
1
)('
)(
)0(')('
)0(')0()(
x
xs
sx
sx
xsx
sxxsx
Quadrupole:
s
x
Drift:
12... MMMM NUSPAS, Knoxville, TN, Jan. 20-31, 2014 5Lecture 3 - Transverse Motion 1

Example: FODO cell
At the heart of every beam line or ring is the “FODO” cell, consisting of a focusing and a defocusing element, separated by drifts:
The transfer matrix is then
f -f
L L
f
L
f
Lf
LL
f
L
f
L
f
L
f
L
1
21
11
01
10
11
101
10
1
2
22
M
USPAS, Knoxville, TN, Jan. 20-31, 2014 6Lecture 3 - Transverse Motion 1
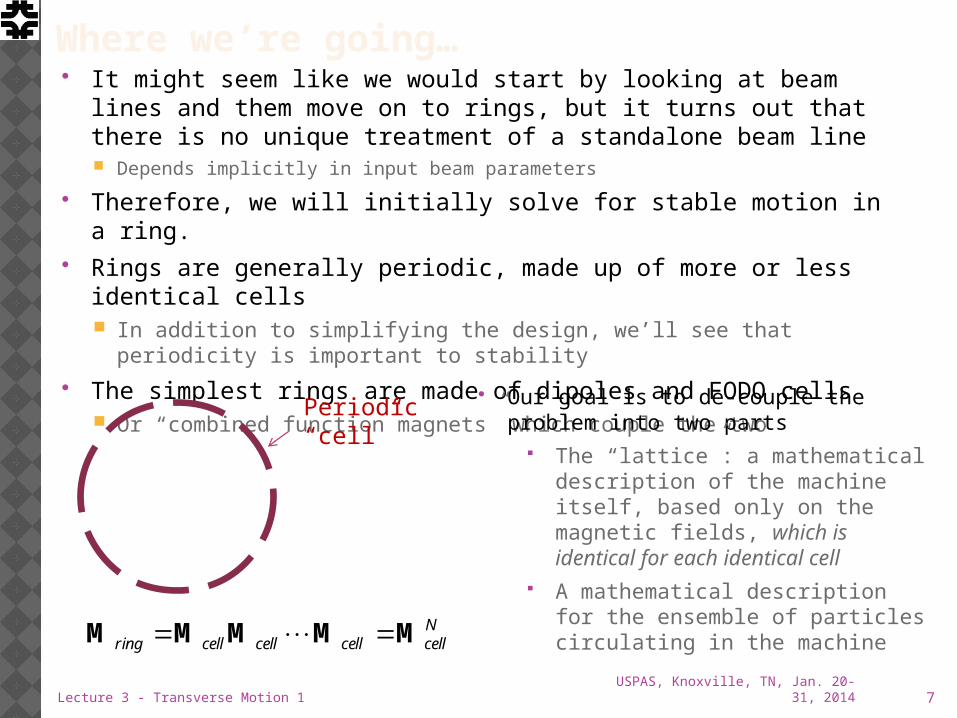
Where we’re going… It might seem like we would start by looking at beam lines and
them move on to rings, but it turns out that there is no unique treatment of a standalone beam line Depends implicitly in input beam parameters
Therefore, we will initially solve for stable motion in a ring. Rings are generally periodic, made up of more or less identical cells
In addition to simplifying the design, we’ll see that periodicity is important to stability
The simplest rings are made of dipoles and FODO cells Or “combined function magnets” which couple the two
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 7
Periodic “cell”
Our goal is to de-couple the problem into two parts
The “lattice”: a mathematical description of the machine itself, based only on the magnetic fields, which is identical for each identical cell
A mathematical description for the ensemble of particles circulating in the machine
Ncellcellcellcellring MMMMM

Stability Criterion We can represent an arbitrarily complex ring as a
combination of individual matrices
We can express an arbitrary initial state as the sum of the eigenvectors of this matrix
After n turns, we have
Because the individual matrices have unit determinants, the product must as well, so
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 8
123... MMMMM nring
221 VVMVV 211 BAx
xBA
x
x
21 VVM nnn BAx
x21
21 /1

Stability Criteria (cont’d) We can therefore express the eigenvalues as
However, if a has any real component, one of the solutions will grow exponentially, so the only stable values are
Examining the (invariant) trace of the matrix
So the general stability criterion is simply
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 9
complex generalin is where;; 21 aee aa
real is where;; 21 ii ee
cos2Tr ii eeM
2Trabs M
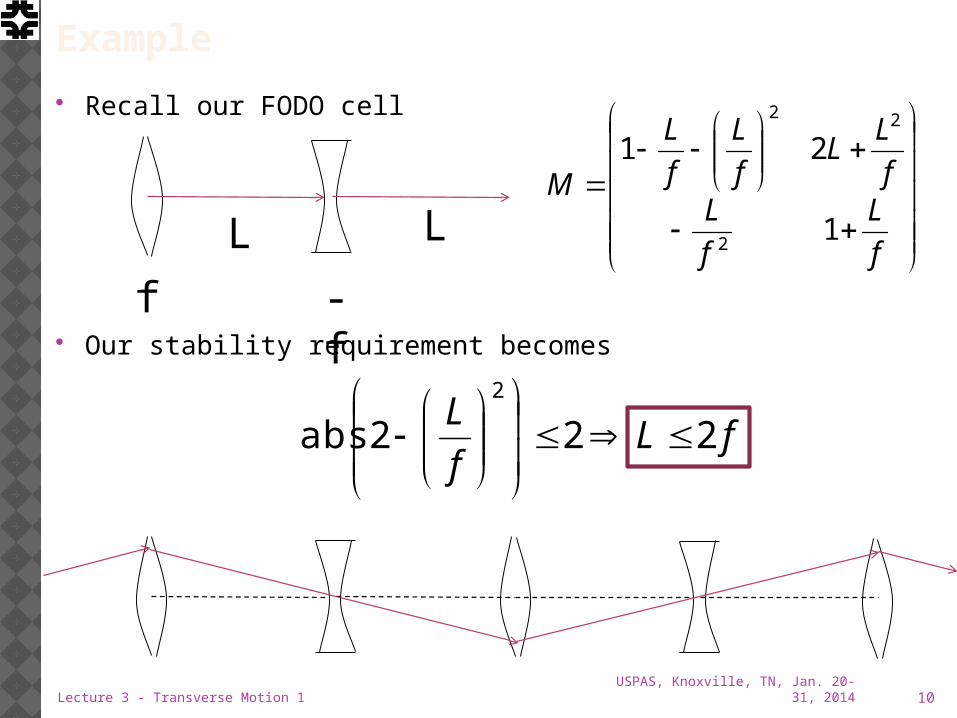
Example
Recall our FODO cell
Our stability requirement becomes
f -f
L L
f
L
f
Lf
LL
f
L
f
L
M
1
21
2
22
fLf
L222abs
2
USPAS, Knoxville, TN, Jan. 20-31, 2014 10Lecture 3 - Transverse Motion 1

Twiss Parametrization We can express the transfer matrix for one period as the sum of an identity
matrix and a traceless matrix
The requirement that Det(M)=1 implies
We can already identify A=Tr(M)/2=cosμ. If we adopt the arbitrary normalization
We can identify B=sinμ and write
Note that
So we can identify it with i=sqrt(-1) and write
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 11
)()(
)()(
10
01),(
ss
ssBAsCs
M
1))()()(( 222 sssBA
1)()()( 2 sss
sincos)()(
)()(sin
10
01cos),( JI
ss
sssCsM
IJ
)()()(0
0)()()(
)()(
)()(
)()(
)()(2
22
sss
sss
ss
ss
ss
ss
)(),( sesCs JM Remember this! We’ll see it again in a few pages

Equations of Motion General equation of motion
For the moment, we will consider motion in the horizontal (x) plane, with a reference trajectory established by the dipole fields.
Solving in this coordinate system, we have
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 12
xy
s
sBvBvyBvxBvm
e
BB
vvv
syx
m
e
m
BveR
RmRmdt
d
dt
pdBveF
xyyxxsys
yx
syx ˆˆˆ
0
ˆˆˆ
xr
Reference trajectory
Particle trajectory
yysrrxrr
yyxrsrsrxryysrsrsrxrxrR
yysrxryyxrxrR
yyxrR
ˆˆ2ˆ
ˆˆˆˆ2ˆˆˆˆˆˆˆ
ˆˆˆˆˆˆ
ˆˆ
2
2

Equations of Motion (cont’d) Equating the x terms
Re-express in terms of path length s. Use
Rewrite equation
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 13
B
Bvp
Bev
mv
Bevm
Bevrr
ys
ys
s
ys
ys
2
22
2
r
s
rtvs
svrdt
dss
Note: s measured along nominal trajectory, vs measured along actual trajectory
r
v
ds
d
rv
dt
d
ds
d
rv
ds
d
dt
ds
dt
d sss
;
2
22
2
2
1 ;12
2
2
22
22
22
2
22
x
B
By
xx
B
Bx
rr
B
Bvr
B
Bv
r
vr
ds
rd
rv
xy
ys
ysss
terms)(rearrange
) (use xr

Equations of Motion Expand fields linearly about the nominal trajectory
Plug into equations of motion and keep only linear terms in x and y
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 14
x
x
sBBx
x
sBBy
y
sBx
x
sBsBsyxB
yy
sBy
y
sBx
x
sBsBsyxB
yyyyyy
x
x
xxxx
)()()()(,0,0),,(
)()()(,0,0),,(
0coupling no
dipole no
coupling no
0)(1
0)(11
112)(111
)(
2
222
2
yy
sB
By
xx
sB
Bx
xxxx
sB
B
xx
B
xx
sBB
x
x
y
y
y
Looks “kinda like” a harmonic oscillator

Piecewise solution These equations are in the form
For K (gradient) constant), these equations are quite simple. For K>0, it’s just a harmonic oscillator and we write
In terms if initial conditions, we identifyand write
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 15
sKbKsKaKsx
sKbsKasKAsx
cossin)('
sincoscos)(
K
xbxa 0
0;
0
0
cossin
sin1
cos
)(
)(
x
x
sKsKK
sKK
sK
sx
sx
0)( xsKx
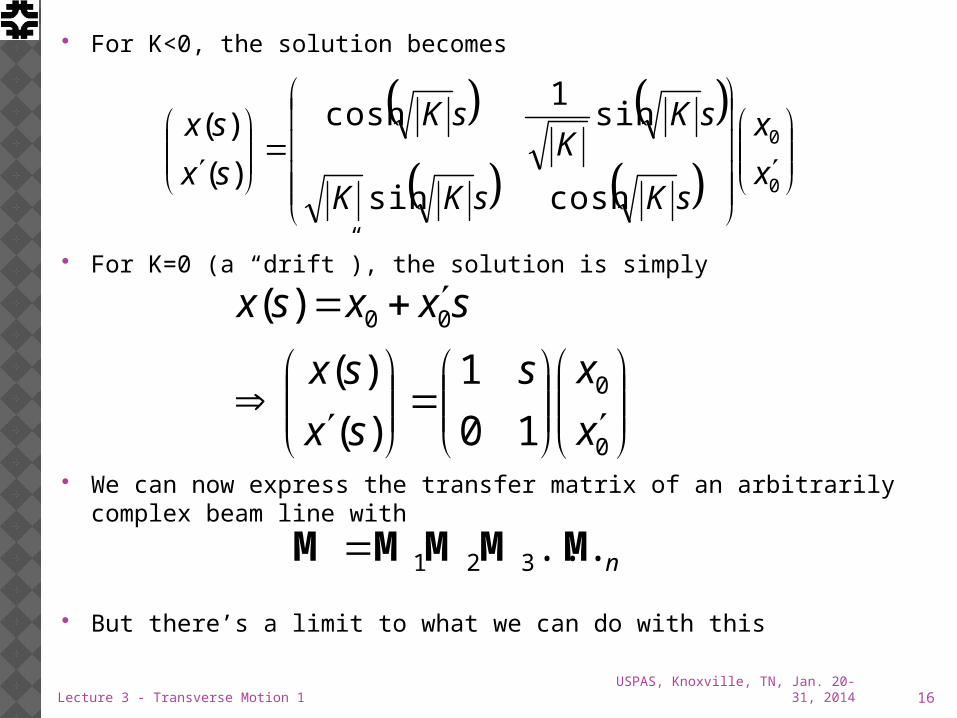
For K<0, the solution becomes
For K=0 (a “drift”), the solution is simply
We can now express the transfer matrix of an arbitrarily complex beam line with
But there’s a limit to what we can do with this
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 16
0
0
coshsin
sin1
cosh
)(
)(
x
x
sKsKK
sKK
sK
sx
sx
0
0
00
10
1
)(
)(
)(
x
xs
sx
sx
sxxsx
nMMMMM ...321

Closed Form Solution Our linear equations of motion are in the form of a “Hill’s Equation”
If K is a constant >0, then so try a solution of the form
If we plug this into the equation, we get
Coefficients must independently vanish, so the sin term gives
If we re-express our general solution
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 17
)()( ;0)( sKCsKxsKx Consider only periodic systems at the moment
)(cos)()( ssAwsx
0sin)2(cos)( 2 wwAKwwwAKxx
2
22by mutliply
'0'202w
kwwwwww
w
sincos
sincos
sincos
1221
1221
21
w
kAwA
w
kAwA
wAwAwAwAx
AAwx
sKAsx cos)(
)()(
BUT ),()( assume
sCs
swCsw
03
2
Kww
kw
We’ll see this much later

Solving for periodic motion Plug in initial condition (s=0Ψ=0) Define phase advances over one period
and we have
But wait! We’ve seen this before…
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 18
k
wxwxA
w
xA
002
01
)(cos);(sin CCCS
0
0
2
2
2
0
2
2
20
200
0
0
2
0
02
00
/
1)(
)(
'
)('
)(
x
x
Sk
wwCS
kwkww
Sk
wS
k
wwC
Cx
Cx
xSk
wwCSx
k
w
w
k
Sw
kx
k
wx
k
wwxCxCx
xSk
wxS
k
wwC
Sk
wwxwxCxCx
This form will make sense in a minute

Recall the Twiss representation of a Period We showed a flew slides ago, that we could write
We quickly identify
We also showed some time ago that a requirement of the Hill’s Equation was that
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 19
sin)(cossin)(
sin)(sin)(cos)()(
)()(sin
10
01cos),(
ss
ssss
sssCsM
)(
)(1)(
)(
2
1
2
1)(
)(
2
2
2
s
ss
ds
sd
k
w
ds
d
k
wws
k
ws
dss
Csw
kCs
s
0
0)(
1)(
)(
12
)(C
Phase advance over one period
Super important!Remember forever!

Closing the Loop We’ve got a general equation of motion in terms of initial
conditions and a single “betatron function” β(s)
β(s) is a parameter of the machine, but we still don’t know its form! Important note!
(s) (and therefore (s) and Υ(s)) are defined to have the periodicity of the machine!
In general Ψ(s) (and therefore x(s)) DO NOT! Indeed, we’ll see it’s very bad if they do
So far, we have used the lattice functions at a point s to propagate the particle to the same point in the next period of the machine. We now generalize this to transport the beam from one point to another, knowing only initial conditions and the lattice functions at both points
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 20
)(
)( ;)(cos)()(0s
s
dssssAsx
)(sin)(cos)()(
1
)(sin)(
)()(cos)(
)(
1
2
1)(
)(cos)()(
ssss
A
sds
sdsAs
ds
sd
sAsx
ssAsx
cellcellNs
ds
2
1
)(2
1 Define “tune” as the number of
pseudo-oscillations around the ring

We use this to define the trigonometric terms at the initial point as
We can then use the sum angle formulas to define the trigonometric terms at any point Ψ(s1) as
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 21
0
00
0000
0
000
)(sin
1)(cos
Ax
AxsS
AxsC
sincossin1
sincos)(sin)(sin
sinsincos1
sincos)(cos)(cos
00
0
0
0
0
00011
00
0
0
0
0
00011
Ax
AAx
CSsSs
Ax
AAx
SCsCs

General Transfer Matrix We plug the previous angular identities for C1 and S1 into the
general transport equations
And (after a little tedious algebra) we find
This is a mess, but we’ll oftenrestrict ourselves to the extremaof b, where
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 22
111
1
1
11111
1
cos
SCAx
CAAx
02
1
ds
d
0
0
1
0
10
100
1
1
1
cossin1
sincos
x
x
x
x

About the Tune The tune is the number of oscillations that a particle makes
around equilibrium in one orbit. For a round machine, we can approximate
Note also that in general
USPAS, Knoxville, TN, Jan. 20-31, 2014Lecture 3 - Transverse Motion 1 23
RRds
2
2
1
2
1
yx