digital image processing lecture 20: representation & description prof. charlene tsai *...
TRANSCRIPT

Digital Image Processing Lecture 20: Representation
& Description
Prof. Charlene TsaiProf. Charlene Tsai
* Materials from Gonzales chapter 11
2
Representation
After segmentation, we get pixels along the boundary or pixels contained in a region.
Representing a region involves two choices: Using external characteristics, e.g. boundary Using internal characteristics, e.g. color and
texture

3
Common Representation
Common external representation methods are: Chain code Polygonal approximation Signature Boundary segments Skeleton (medial axis)
We’ll discuss the first 3.
4
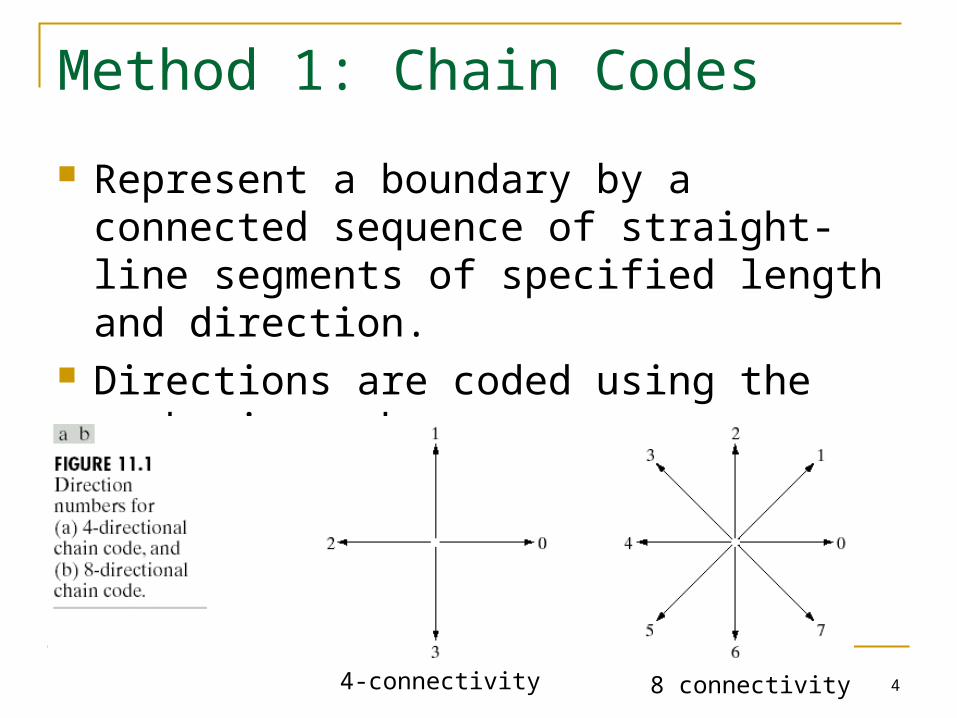
Method 1: Chain Codes
Represent a boundary by a connected sequence of straight-line segments of specified length and direction.
Directions are coded using the numbering scheme
4-connectivity 8 connectivity

5
Generation of Chain Codes
Walking along the boundary in clockwise direction, for every pair of pixels assign the direction.
Problems: Long chain Sensitive to noise
Remedies? Resampling using larger
grid spacing.

6
Resampling for Chain Codes
0033…010766…12
Spacing of the sampling grid affect the accuracy of the representation
(4-directional)(8-directional)
7
Normalization for Chain Codes With respect to starting point:
Make the chain code a circular sequence Redefine the starting point which gives an integer of
minimum magnitude E.g. 101003333222 normalized to 003333222101
For rotation: Using first difference (FD) obtained by counting the number
of direction changes in counterclockwise direction E.g FD of a 4-direction chain code 10103322 is 3133030
For scaling: Altering the size of the resampling grid.

8
Method 2: Polygonal Approximation Approximate a digital boundary with arbitrary
accuracy by a polygon. Goal: to capture the “essence” of the
boundary shape with the fewest possible polygonal segments.

9
Minimum Perimeter Polygons
Two techniques: merging & splitting

10
Merging Technique
Repeat the following steps: Merging unprocessed points along the boundary
until the least-square error line fit exceed the threshold.
Store the parameters of the line Reset the LS error to 0
Intersections of adjacent line segments form vertices of the polygon.
Problem: vertices of the polygon do not always correspond to inflections (e.g. corners) in the original boundary.

11
Splitting Technique
Subdivide a segment successively into two parts until a specified criterion is met.
For example

12
Method 3: Signature
Reduce the boundary representation to a 1D function
For example, distance vs. angle

13
(con’d)
For the signature just described Invariant to translation (everything w.r.t. the
centroid) Depending on rotation and scaling How to remove the dependence on rotation?
Selecting point farthest from the centroid Farthest point on the eigen axis (more robust) Using the chain code
How to remove the dependence on scaling? Scale all functions to span the range, say, [0,1] (not very
robust) Normalize by the variance

14
Descriptors
Boundary information can be used directly, or converted into features that describe properties of a region, such as Length of the boundary Orientation of straight line joining its extreme
points Number of concavities in the boundary

15
Boundary Descriptors (Properties) Length: approximated by the # of pixels Diameter:
Basic rectangle: defined by Major axis: the line giving the diameter Minor axis: the line perpendicular to major axis
Eccentricity: ratio of the 2 axes
jiji
ppD ,max,

16
Fourier Descriptor
Given a set of boundary points (x0, y0), (x1, y1), (x2, y2), …,. (xK-1, yK-1).
Represent the sequence of coordinates as s(k)=[xk, yk], for k=0, 1, 2, …, K-1.
Using complex representation for each point:
s(k) = xk + jyk
Advantage: reducing 2D to 1D problem
17
1D Fourier (Review)
DFT of s(k) is
The complex coefficients a(u), for u=0,1, 2, …, K-1, are called the Fourier descriptor of the boundary
The inverse Fourier restores s(k)
1
0
/21 K
k
KukjeksK
ua
1
0
/2K
u
Kukjeuaks
18
Fourier Approximation
Using only the first P coefficients (a(u)=0 for u>P)
Please note that k still ranges from 0 to K-1 The smaller P becomes, the more detail that is lost
on the boundary There are ways to make the descriptor insensitive to
translation, rotation, and scale changes. Please refer to Gonzalez pg 658-659 for details.
1
0
/2ˆP
u
Kukjeuaks

19
Example

20
Region Descriptors
Simple descriptors: Area: # of pixels in the region Perimeter: length of its boundary Compactness: (perimeter)2/area
Q: What shape gives the minimal compactness Mean and median of the gray levels.
Topological descriptors: # of holes # of connected components
21
Summary
Common external representation methods are: Chain code Polygonal approximation Signature
Descriptors Boundary descriptor Fourier descriptor Region descriptor