aashto connected & automated vehicle (cav) working...
TRANSCRIPT

AASHTO
Connected & Automated
Vehicle (CAV) Working Group
August 2016 Meeting
Denver, Colorado
Blaine Leonard, UDOT, Chair
Matt Smith, MDOT, Co-Chair
Greg Larsen, CalTrans, Co-Chair
2
Agenda
1. Welcome / Introductions
2. Recap of CAV Activities and Future Direction
3. Break for Lunch
4. SPaT Deployment Challenge & Resolution
5. OEM Workshop – V2I OEM and DOT Data
Exchanges
6. AV Policy
Recap of CAV TWG Activities
and Future Direction11:15 AM

4
CAV TWG Vision
The CAV Working Group is the recognized
national leader for state transportation
agencies for information and collaboration
on connected and automated vehicle
deployment and impacts, and is the voice
for those entities relative to these emerging
technologies.
5
CAV TWG
• Membership
• Objectives:
Collaborate with V2I DC, PFS and other
groups (AASHTO Committees, ITE, ITS-A)
Forum for Sharing Information & Resources
Support Deployment Activities
6
CAV TWG Activities
• Guided by the STSMO Strategic Plan
Plan elements specific to CAV
Part of STSMO Executive Committee
Coordinate with other STSMO TWGs
Systems Operations, Performance Measures,
Research, Traffic Incident Management
• Monthly Conference Calls
• Annual Meeting

7
CAV TWG Issues
• Presentations from Pilot Deployments
• Updates on / Input to Deployment Tools
AASHTO Near-Term V2I Transition and
Phasing Analysis (USDOT / Booz Allen
Hamilton) (Pending upgrade / distribution)
• Coordination with V2I DC
• Deployment Survey (with V2I DC TWG1)
• Patent Infringement Issue
8
CAV TWG Issues
• Connected Vehicle Security
• FCC 5.9GHz Spectrum Sharing
Participated in NOCoE Webinar June 30
Contributed to AASHTO Comments to FCC
• OEM Data Sharing Relationships
• SPaT Deployment Challenge (with TWG1)
• Automated Vehicle Policy
9
2015 Work Plan for CAV TWGNear Term Term Actions:
• Support completion of Near-term V2I Transition project
• Support the V2I Deployment Coalition
• Develop a list of projects of interest and evaluate
mechanisms for executing these projects
V2I Application Survey (with TWG1)
SPaT Deployment Challenge
• Explore ways to improve collaboration with OEMs (TWG3)
• Webinars to disseminate CV/AV experience and tools
CV Pilot / Deployment Tools / Security & Patent Issues / AV Policy
• Provide a forum for state DOTs and other AASHTO member agencies to collaborate and share information
10
2015 Work Plan for CAV TWGLong Term Term Actions:
• Collect and support information dissemination related to
Connected and Automated Vehicle deployment
o Identify significant reports and tools
o Discuss opportunities for storage and dissemination with NOCoE
o Place significant reports and tools in the NOCoE repository
o Publicize the availability of the reports and tools
Aligns with V2I DC TWG2 (Research) Activity
• Coordinate with STSMO and other AASHTO
Subcommittees on CV and AV issues

11
Looking Ahead to the Next Year
• Relationship with the V2IDC & Connected
Vehicle PFS
Overlaps in people and projects
Collaboration without duplication
• CAV WG Plan for the Upcoming Year
Reduce to bi-monthly conference calls
Continue our focus areas
12
Looking Ahead to the Next Year
• What would members like to change?
• Issues that members would like to see
addressed

Break for Lunch11:55 AM

SPaT Deployment Challenge12:30 PM

15
SPaT Deployment Challenge
• Background – why and where
• Resources – what we need to do
• Outreach – getting the word out
• Formal Challenge – the AASHTO SPaT
Challenge Resolution
16
V2I Deployment Challenge
• “Chicken and Egg” problem
• Discussion within V2I DC TWG 1:
How do we encourage / initiate broad V2I
deployment?
How do we demonstrate commitment to OEM
and private industry?
What is a reasonable, early expectation?
• Signalized Intersections (low-hanging fruit)
17
V2I Deployment Challenge
• Deployment of roadside DSRC hardware
broadcasting Signal Phase and Timing (SPaT)
on:
a coordinated corridor of at least
20 intersections
in each state
by 2020
• Commitment to operate for at least 10 years

18
V2I Deployment Challenge
Goal of the Challenge:
• Give DOTs an entry into V2I deployment and
operations
valuable experience with procurement, installation,
operations
• Show a commitment to OEMs and developers
Break through the “chicken and egg” problem
• Help promote future (more advanced) V2I
deployments

19
Resources / Tools
Original Resources Identified by TWG 1:
1. Guidelines for selecting corridors
2. Procurement guidance
3. DSRC licensing information
4. Implementation guidance
5. Estimated costs (install & maintenance)
6. Identification of existing funding sources that
agencies may consider
20
Resource /Tool Development
• TWG 1 subgroup met July 20th
Jim Peters, Jon Riehl, James Li, Bill Legg,
Dean Deeter
• Developed Initial Approach and Began
Progress on the Documents
• Others are Welcome to Join
21
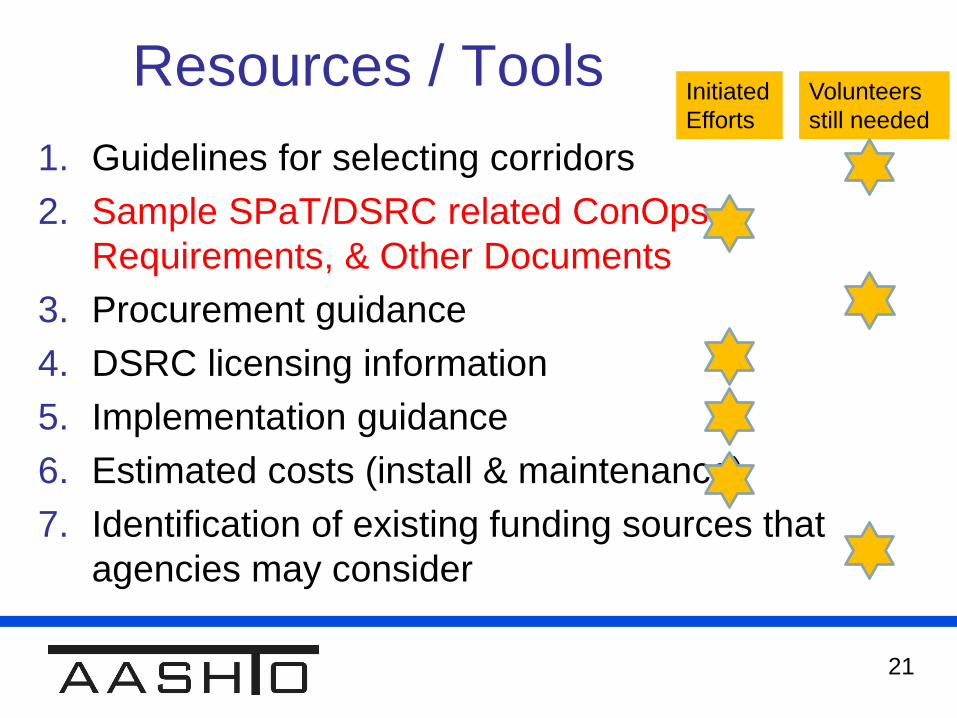
Resources / Tools
1. Guidelines for selecting corridors
2. Sample SPaT/DSRC related ConOps,
Requirements, & Other Documents
3. Procurement guidance
4. DSRC licensing information
5. Implementation guidance
6. Estimated costs (install & maintenance)
7. Identification of existing funding sources that
agencies may consider
Initiated
Efforts
Volunteers
still needed
22
Existing Resources
• Recognize the resources already developed;
no need to reinvent these. Some Existing Resources
Use the documents; describe the value to agencies participating in
the SPaT Challenge
Summarize the content of these (documents, interviews, etc.) for
use in the SPaT Challenge
Some New Resources – May need to develop
resources or portions of resources if none exist
23
DSRC Licensing Information Report prepared by
ITS America,
USDOT, FHWA
Plan is to summarize
what is in this
document, and how
it can be used
24
Implementation Guidance
• What should this include?
Give a general view of what it takes to install,
what is needed in the field, what equipment
is needed, etc. Possibly include plan sheets or guidelines for installing
hardware and all other components to reach functionality
Reference / use the AASHTO Footprint Analysis
Articulate which traffic signal controllers have the
functionality imbedded in them to support SPaT broadcasts
SPaT Requirements (e.g. broadcast at 10 Hz, others?)
May need to include MAP broadcast information
25
Estimated Costs
(Install & Maintain)
Collect and summarize content from
several sources of information
V2I Maintenance Webinar in September
(New York City & UMTRI experiences)
Additional sources identified (transit cost
estimates, MMITSS deployments)
26
Sample ConOps &
Requirements Documents
Possible Sources: MMITSS (AZ, CA) Concept of Operations &
other materials
NYC & THEA Pilot ConOps
Summarize how agencies could use and
benefit from these
Capture how other States have applied these
documents on other projects
27
Resources & Tools Subgroup
• Next Meeting: Thur Aug18th, noon edt
• Anyone wishing to participate – contact
Dean Deeter, [email protected]
27

28
SPaT
Concept
One-pager
28
• Feedback Received:
• Who is the audience?
• Add more content
• Suggested Revised
Approach
29
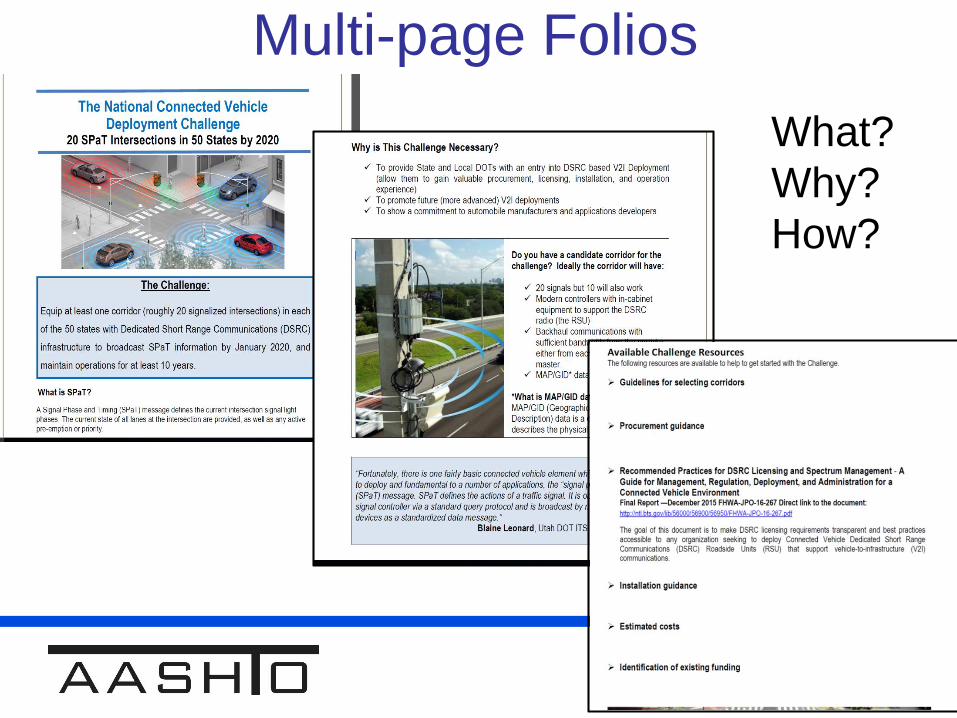
Multi-page Folios
29
What?
Why?
How?
30
Information Sharing
• Work with NOCoE to launch a website
Background Material / References / Tools
Progress Map of Deployments
Links to other documents
Management Briefings
Reference Materials
Deployment Overviews
30
31
AASHTO SPaT Challenge
Resolution
• Seeking Formal Resolution
Presented at SCOTE (Traffic Engineering) for
consideration
Informal discussions at other STSMO Working Groups
Formal motion: STSMO Meeting on Thursday morning
Target: Resolution Adoption at AASHTO Annual
meeting in November

32
AASHTO Resolution
Supporting Documents
• AASHTO Policy Resolution – AASHTO SPaT Challenge
2 page document defining the Policy Resolution
• SPaT Resolution Background
4 page document with supporting information

33
SPaT Challenge
Questions
Additional Considerations for Discussion:
• What Resources are we Missing?
• What is a Next Step?
How to keep the basic SPaT deployment challenge
simple, but still encourage additional, next phase
deployments
OEM Workshop – V2I Data
Exchanges Discussion1:15 PM
35
V2I Data Exchanges with Vehicles
1. Review Infrastructure Data Requests from
the OEMs
OEMs have requested feedback prior to the
September Workshop
2. Discuss Infrastructure Owners & Operators
Data Requests
To be sent to OEMs prior to September
Workshop
36
OEM V2I Applications
Crash Avoidance Metrics Partnership (CAMP)
Applications:
Signalized Intersections
Curve Speed Warning
Reduced Speed Zone / Lane Closure
Queue Warning
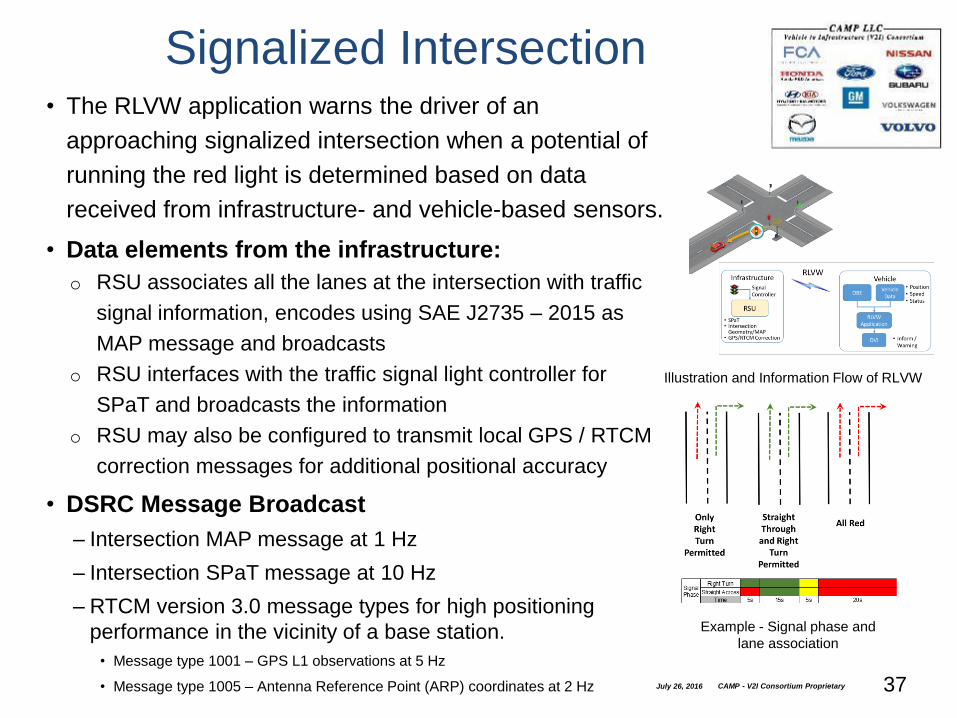
• The RLVW application warns the driver of an
approaching signalized intersection when a potential of
running the red light is determined based on data
received from infrastructure- and vehicle-based sensors.
• Data elements from the infrastructure:
o RSU associates all the lanes at the intersection with traffic
signal information, encodes using SAE J2735 – 2015 as
MAP message and broadcasts
o RSU interfaces with the traffic signal light controller for
SPaT and broadcasts the information
o RSU may also be configured to transmit local GPS / RTCM
correction messages for additional positional accuracy
• DSRC Message Broadcast
– Intersection MAP message at 1 Hz
– Intersection SPaT message at 10 Hz
– RTCM version 3.0 message types for high positioning
performance in the vicinity of a base station.
• Message type 1001 – GPS L1 observations at 5 Hz
• Message type 1005 – Antenna Reference Point (ARP) coordinates at 2 Hz July 26, 2016 CAMP - V2I Consortium Proprietary 37
Signalized Intersection
Illustration and Information Flow of RLVW
Example - Signal phase and
lane association
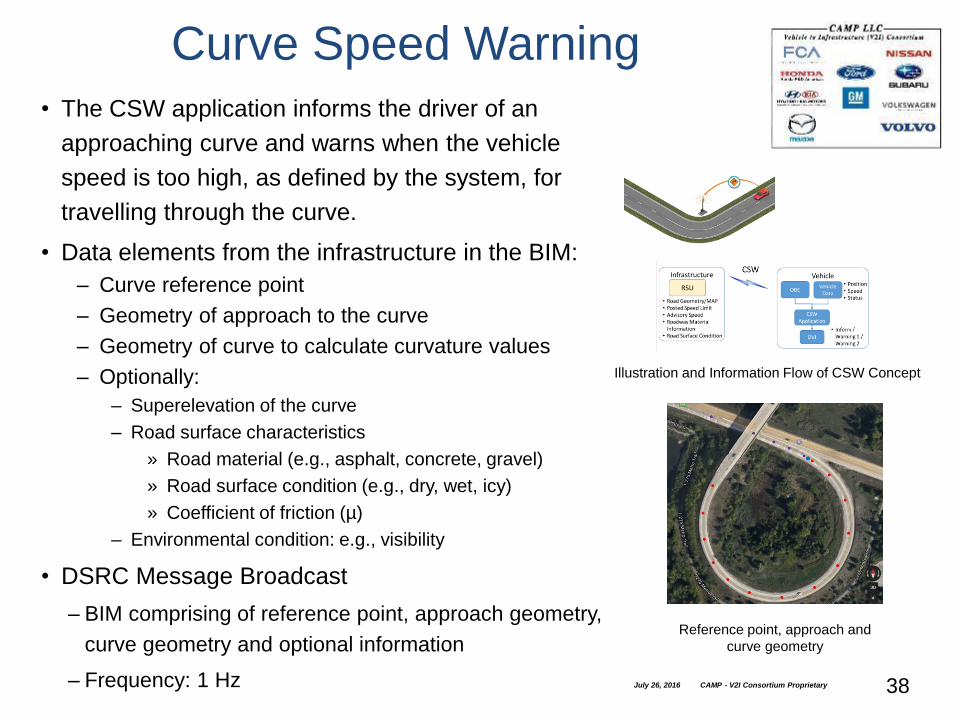
Curve Speed Warning
• The CSW application informs the driver of an
approaching curve and warns when the vehicle
speed is too high, as defined by the system, for
travelling through the curve.
• Data elements from the infrastructure in the BIM:
– Curve reference point
– Geometry of approach to the curve
– Geometry of curve to calculate curvature values
– Optionally:
– Superelevation of the curve
– Road surface characteristics
» Road material (e.g., asphalt, concrete, gravel)
» Road surface condition (e.g., dry, wet, icy)
» Coefficient of friction (µ)
– Environmental condition: e.g., visibility
• DSRC Message Broadcast
– BIM comprising of reference point, approach geometry,
curve geometry and optional information
– Frequency: 1 Hz
Illustration and Information Flow of CSW Concept
July 26, 2016 CAMP - V2I Consortium Proprietary 38
Reference point, approach and
curve geometry
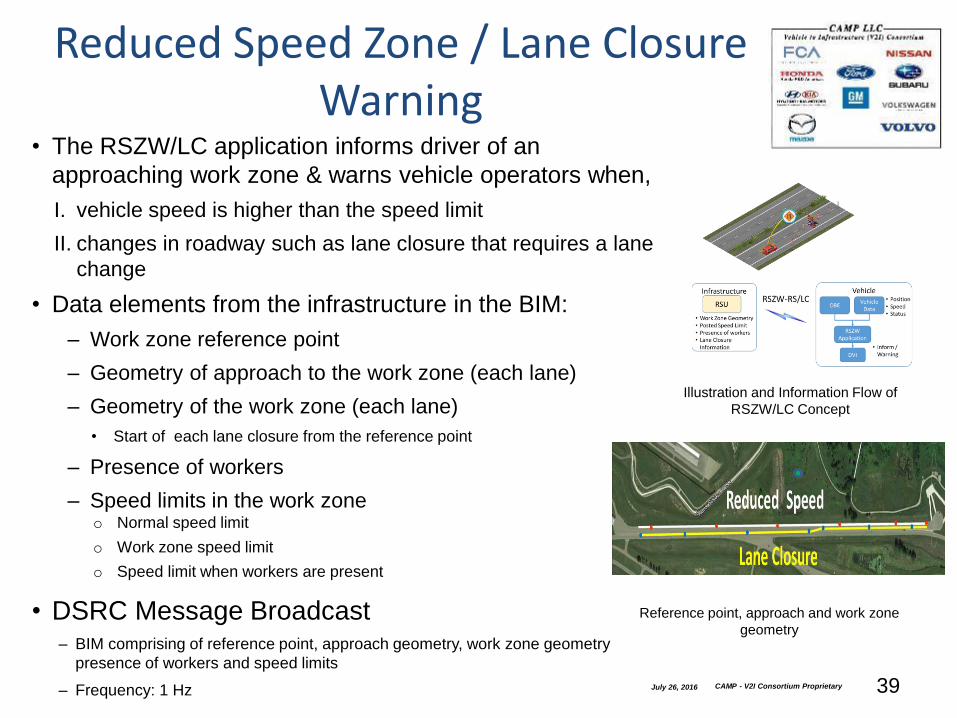
Reduced Speed Zone / Lane Closure Warning
• The RSZW/LC application informs driver of an
approaching work zone & warns vehicle operators when,
I. vehicle speed is higher than the speed limit
II. changes in roadway such as lane closure that requires a lane
change
• Data elements from the infrastructure in the BIM:
– Work zone reference point
– Geometry of approach to the work zone (each lane)
– Geometry of the work zone (each lane)
• Start of each lane closure from the reference point
– Presence of workers
– Speed limits in the work zoneo Normal speed limit
o Work zone speed limit
o Speed limit when workers are present
• DSRC Message Broadcast– BIM comprising of reference point, approach geometry, work zone geometry
presence of workers and speed limits
– Frequency: 1 Hz July 26, 2016 CAMP - V2I Consortium Proprietary 39
Illustration and Information Flow of
RSZW/LC Concept
Reference point, approach and work zone
geometry
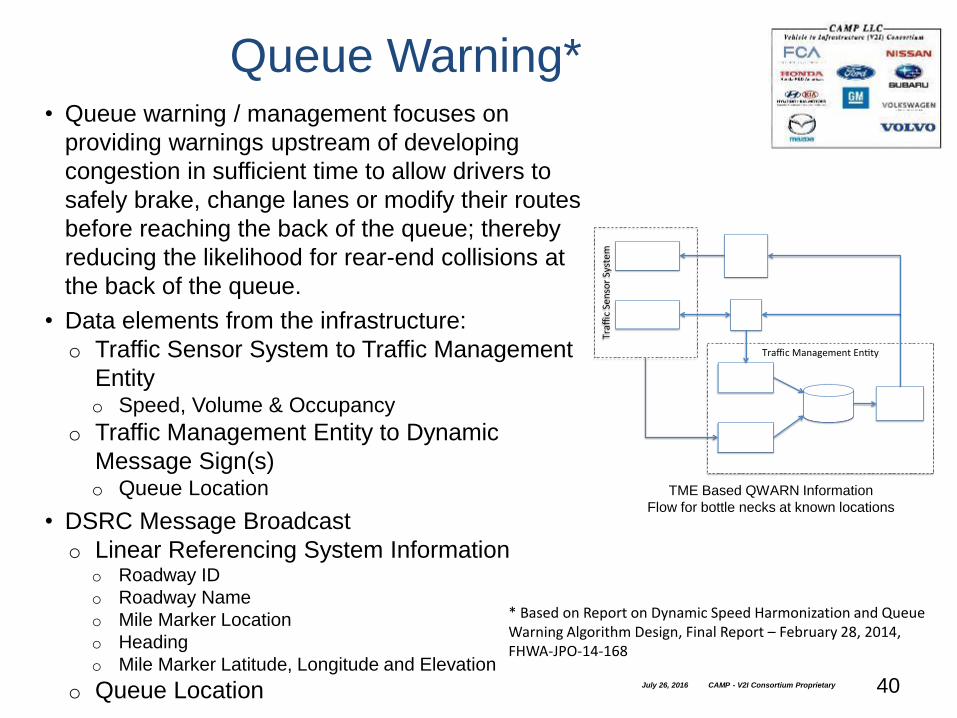
• Queue warning / management focuses on
providing warnings upstream of developing
congestion in sufficient time to allow drivers to
safely brake, change lanes or modify their routes
before reaching the back of the queue; thereby
reducing the likelihood for rear-end collisions at
the back of the queue.
• Data elements from the infrastructure:
o Traffic Sensor System to Traffic Management
Entityo Speed, Volume & Occupancy
o Traffic Management Entity to Dynamic
Message Sign(s)o Queue Location
• DSRC Message Broadcast
o Linear Referencing System Informationo Roadway ID
o Roadway Name
o Mile Marker Location
o Heading
o Mile Marker Latitude, Longitude and Elevation
o Queue Location July 26, 2016 CAMP - V2I Consortium Proprietary 40
Queue Warning*
TME Based QWARN Information
Flow for bottle necks at known locations
TrafficManagementEn ty
TrafficSensorSystem
INFLODatabase
QWARNApplica on
CVDataAggregator
TSSDataAggregator
ConnectedVehicles
RSE
DynamicMessageSign(s)
UnequippedVehicles
* Based on Report on Dynamic Speed Harmonization and Queue Warning Algorithm Design, Final Report – February 28, 2014, FHWA-JPO-14-168

41
Infrastructure Owner Operator
(IOO) V2I Applications
1. Queue Warning
2. Vehicle Data for Traffic Operations
3. Intelligent Traffic Signal System
4. Warnings About Upcoming Work Zones
5. Curve Warnings
6. Road Weather Motorist Alert & Warning

Sources Identified for Each Application
1. Queue Warning Report on Dynamic Speed Harmonization and Queue Warning
Algorithm Design, February 2014 http://ntl.bts.gov/lib/54000/54800/54895/FHWA-JPO-14-168.pdf
Intelligent Network Flow Optimization (INFLO) Prototype Seattle Small-Scale Demonstration Final Report, May 2015
2. Vehicle Data for Traffic Operations CVRIA for Vehicle Data for Traffic Operations,
http://www.iteris.com/cvria/html/applications/app87.html#tab-3
Possibly the Wyoming, THEA, or NYC Pilot ConOps?
3. Intelligent Traffic Signal Systems MMITSS Final ConOps; Oct 21, 2012 http://www.cts.virginia.edu/wp-
content/uploads/2014/05/Task2.3._CONOPS_6_Final_Revised.pdf
MMITSS Systems Requirements Document: http://www.cts.virginia.edu/wp-content/uploads/2014/05/Task3._SyRS_4_PostSubmittal_V3.pdf
Vehicle Information Exchange Needs for Mobility Applications Version 3.0; FHWA-JPO; April 2013
Sources Identified for Each Application
4. Reduced Speed Zones / Warnings About Upcoming Work Zones
Vehicle-to-Infrastructure (V2I) Safety Applications: Concept of Operations, Final Report, FHWA-JPO, March 8, 2013 http://ntl.bts.gov/lib/48000/48500/48527/ED89E720.pdf
Vehicle-to-Infrastructure (V2I) Safety Applications: System Requirements Document; FHWA-JPO; March 8, 2013 http://ntl.bts.gov/lib/48000/48500/48527/ED89E720.pdf
5. Curve Warnings Accelerated V2I Safety Applications Concept of Operations May 29, 2012;
6. Road Weather Motorist Advisory & Warning Concept of Operations for Road Weather Connected Vehicle and
Automated Vehicle Applications; Oct 2015 DRAFT
Weather-related Information Needs for Connected Vehicles; April 2014 http://ntl.bts.gov/lib/48000/48500/48523/272C82A5.pdf
” Appendix B. Data in BSM Part 1 or Part 2
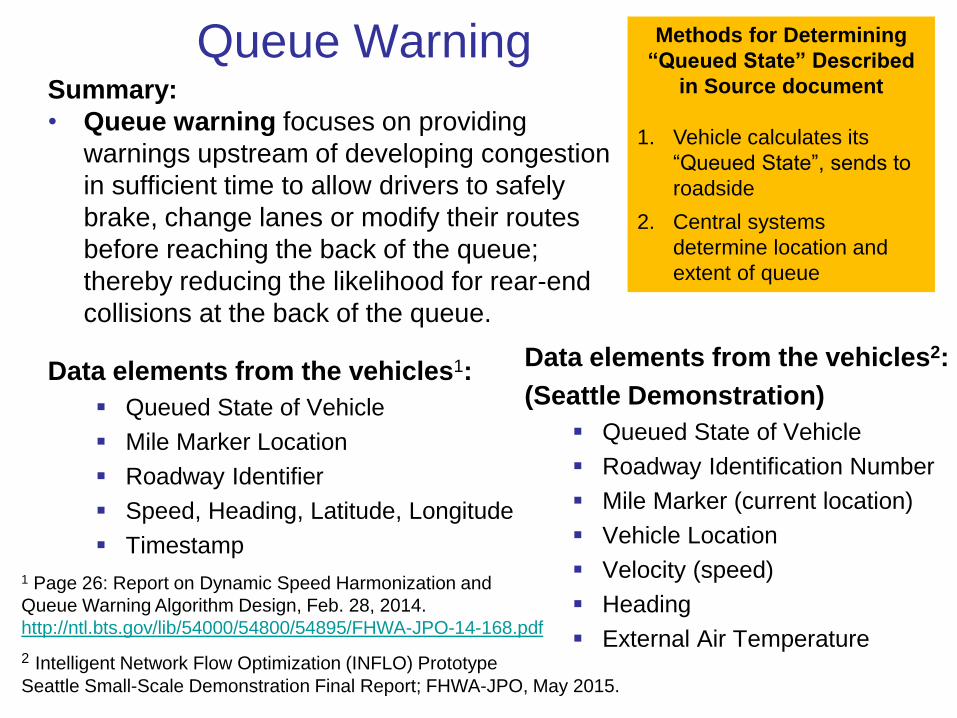
Queue WarningSummary:
• Queue warning focuses on providing
warnings upstream of developing congestion
in sufficient time to allow drivers to safely
brake, change lanes or modify their routes
before reaching the back of the queue;
thereby reducing the likelihood for rear-end
collisions at the back of the queue.
Data elements from the vehicles1:
Queued State of Vehicle
Mile Marker Location
Roadway Identifier
Speed, Heading, Latitude, Longitude
Timestamp
1 Page 26: Report on Dynamic Speed Harmonization and
Queue Warning Algorithm Design, Feb. 28, 2014.
http://ntl.bts.gov/lib/54000/54800/54895/FHWA-JPO-14-168.pdf
Methods for Determining
“Queued State” Described
in Source document
1. Vehicle calculates its
“Queued State”, sends to
roadside
2. Central systems
determine location and
extent of queue
Data elements from the vehicles2:
(Seattle Demonstration)
Queued State of Vehicle
Roadway Identification Number
Mile Marker (current location)
Vehicle Location
Velocity (speed)
Heading
External Air Temperature2 Intelligent Network Flow Optimization (INFLO) Prototype
Seattle Small-Scale Demonstration Final Report; FHWA-JPO, May 2015.

Vehicle Data for Traffic OperationsSummary:
The Vehicle Data for Traffic Operations (VDTO) application uses probe data
information obtained from vehicles in the network to support traffic operations,
including incident detection and the implementation of localized operational
strategies. The implantation of incident detection enables transportation
agencies to determine the location of potential incidents so the agencies can
respond more quickly to the incident and mitigate any negative impacts to the
transportation network.
Data Elements from the Vehicle:These are information flows from the physical vehicle databuss and OBE3
Vehicle location and motion:
• Location in 3 dimensions;
• Measured speed;
• Heading
• Acceleration,
• Braking status and size,
• Speed changes
3 CVRIA for Vehicle Data for Traffic Operations,
http://www.iteris.com/cvria/html/applications/app87.html#tab-3
Environmental data:
• measured air temperature,
• exterior light status,
• Wiper status,
• sun sensor status,
• rain sensor status,
• traction control status,
• anti-lock brake status,
• other collected vehicle system status
Intelligent Traffic Signal Systems (ISIG)
Summary:
• CVRIA definition: The Intelligent Traffic Signal System (ISIG) application uses
both vehicle location and movement information from connected vehicles as well
as infrastructure measurement of non-equipped vehicles to improve the
operations of traffic signal control systems. The application utilizes the vehicle
information to adjust signal timing for an intersection or group of intersections in
order to improve traffic flow, including allowing platoon flow through the
intersection.
• ISIG Use Cases (excluding transit, pedestrian, freight, emergency) Include:
Basic Signal Actuation (single equipped vehicle) Congestion Control
Basic Signal Actuation (multiple equipped vehicles) Coordinated Section of Signals
Dilemma Zone Protection
5 MMITSS Final Requirements http://www.cts.virginia.edu/wp-content/uploads/2014/05/Task3._SyRS_4_PostSubmittal_V3.pdf
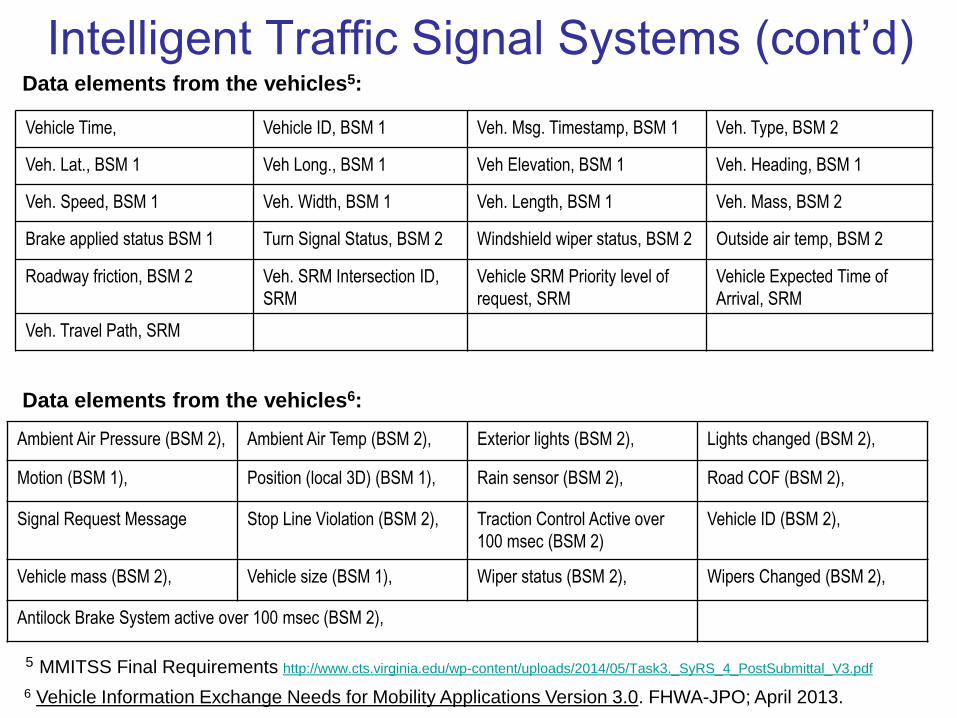
Intelligent Traffic Signal Systems (cont’d)Data elements from the vehicles5:
Data elements from the vehicles6:
6 Vehicle Information Exchange Needs for Mobility Applications Version 3.0. FHWA-JPO; April 2013.
Ambient Air Pressure (BSM 2), Ambient Air Temp (BSM 2), Exterior lights (BSM 2), Lights changed (BSM 2),
Motion (BSM 1), Position (local 3D) (BSM 1), Rain sensor (BSM 2), Road COF (BSM 2),
Signal Request Message Stop Line Violation (BSM 2), Traction Control Active over
100 msec (BSM 2)
Vehicle ID (BSM 2),
Vehicle mass (BSM 2), Vehicle size (BSM 1), Wiper status (BSM 2), Wipers Changed (BSM 2),
Antilock Brake System active over 100 msec (BSM 2),
Vehicle Time, Vehicle ID, BSM 1 Veh. Msg. Timestamp, BSM 1 Veh. Type, BSM 2
Veh. Lat., BSM 1 Veh Long., BSM 1 Veh Elevation, BSM 1 Veh. Heading, BSM 1
Veh. Speed, BSM 1 Veh. Width, BSM 1 Veh. Length, BSM 1 Veh. Mass, BSM 2
Brake applied status BSM 1 Turn Signal Status, BSM 2 Windshield wiper status, BSM 2 Outside air temp, BSM 2
Roadway friction, BSM 2 Veh. SRM Intersection ID,
SRM
Vehicle SRM Priority level of
request, SRM
Vehicle Expected Time of
Arrival, SRM
Veh. Travel Path, SRM
5 MMITSS Final Requirements http://www.cts.virginia.edu/wp-content/uploads/2014/05/Task3._SyRS_4_PostSubmittal_V3.pdf

Reduced Speed Zone Warnings /
Warnings About Upcoming Work ZonesSummary:
• The RSZW/LC application informs the driver of an approaching work zone
and warns vehicle operators when,
• vehicle speed is higher than the speed limit
• changes in roadway such as lane closure that requires a lane change
Data elements from the vehicles:
V2I Safety Applications ConOps7 & Requirements8 defines data needs as:
- Vehicle Positioning Information
- Vehicle Speed
- Vehicle Acceleration
- Vehicle Heading
7 Vehicle-to-Infrastructure (V2I) Safety Applications: Concept of Operations, Final Report FHWA-JPO, March 8, 2013;
http://ntl.bts.gov/lib/48000/48500/48527/ED89E720.pdf8 Vehicle-to-Infrastructure (V2I) Safety Applications: System Requirements Document; FHWA-JPO, March 8, 2013;
http://ntl.bts.gov/lib/48000/48500/48527/ED89E720.pdf
Curve Warnings
Summary:
• The Curve Speed Warning application informs the driver of an approaching
curve and warns when the vehicle speed is too high, as defined by the
system, for travelling through the curve.
Data elements from the vehicles:
Vehicle speed and rate of acceleration
Steering wheel angle
Turn signal activation
Intervention by the electronic stability control (ESC), ABS, or traction
control
9 pg. 66: Accelerated V2I Safety Applications Concept of Operations May 29, 2012
http://ntl.bts.gov/lib/48000/48500/48523/272C82A5.pdf
Road Weather Motorist Advisory and WarningSummary
Two information loops can be envisioned in this application. The first emphasizes gathering and disseminating spot warnings and advisories directly to individual motorists in the fastest possible means, while the second focuses on the integration of road weather information into a broader set of advisories but over a longer time period.10
Data elements from all vehicles11
• Ambient air temperature Essential to diagnosing precipitation along roadways
12
• Ambient air pressure
• Antilock Brake System active over 100 msec
• Exterior lights (status) Headlights were found to have little influence on the output
3
• Lights changed
• Rain sensor Light rain inferences from the VDT Road Weather Hazard (RWH) module were reduced in accuracy by
about 50%, light snow by 30%, and there was also a slight reduction in heavy snow inferences.3
• Road coefficient of friction
• Traction Control System active over 100 msec
• Wiper status Wiper status also proved essential in the RWH precipitation algorithm and should be included in BSM2
3
• Wipers changed …optimally, information should be sent every time there is a change in wiper status (e.g., off to intermittent,
intermittent to low).3
• Confidence-speed/heading/throttle10 Concept of Operations for Road Weather Connected Vehicle and Automated Vehicle Applications; Oct 2015 DRAFT11 “” Appendix B. Data in BSM Part 1 or Part 212 Weather-related Information Needs for Connected Vehicles; April 2014
Road Weather Motorist Advisory and Warning
(cont’d)
Data elements for BSM213
• ABS*
• Ambient air temp*
• Ambient atmospheric pressure*
• Precipitation sensor*
• Tire air pressure
• Vehicle type
• Wiper status and mode change*
• Light status and mode change*
• Traction control active*
• Stability control active*
• Wheel rotational displacement*
* Indicated as priority
3 FHWA Road Weather 2015-Weather Recommendations for CAMP

AV Policy Discussion4:15 PM
53
AV Legislative Activity
• States with AV Bills:
Nevada
California
Florida
Michigan
Washington DC
Tennessee
Louisiana (definition only)
North Dakota (study only)
Utah (study only)
Arizona (Exec Order)
• States that Introduced Legislation:
• 16 states in 2015; 12 states in 2014

54
Current AV Legislative Activity
• California
Establish driverless vehicle testing areas
Authorize actual operation in specific locations
• Michigan
Six bills currently in play
Create Council on Mobility
Liability Protection
Authorize Platooning
55
Current AV Legislative Activity
• Pennsylvania
Allow testing for Level 4 AV
Establish broad Task Force
• Wisconsin
Considering a Policy Group and Study
• Others?
56
AV Legislative / Policy
• Resources:
National Conference of State Legislatures
(NCSL) – tracking of legislation
NHTSA “Preliminary Statement of Policy
Concerning Automated Vehicles” (2013)
Bryant Walker Smith, “Automated Vehicles Are
Probably Legal in the United States”, Tex. A&M
Law Rev. 411 (2014)
57
AV Legislative / Policy• Resources, con’t:
Wood, SP, et al., “The Potential Regulatory
Challenges of Increasingly Autonomous Motor
Vehicles”, Santa Clara Law Rev. 1423 2012
Isaac, Lauren “Driving Toward Driverless: A
Guide for Government Agencies”, WSP Parsons
Brinckerhoff, 2016
Bryant Walker Smith, “How Governments Can
Promote Automated Driving”,
NewlyPossible.Org, 2016
58
AV Policy Issues
• What can the CAV TWG do to help states?
• What conversations should we be having?

59
Thanks for Participating!
Remember: BI-monthly meetings
Contacts:
Blaine Leonard, UDOT - [email protected]
Matt Smith, MDOT – [email protected]
Greg Larson, CalTrans - [email protected]
Dean Deeter, Athey Creek –