a dynamic flight model for slocum gliders and implications
TRANSCRIPT

A Dynamic Flight Model for Slocum Gliders and Implications for TurbulenceMicrostructure Measurements
LUCAS MERCKELBACH AND ANJA BERGER
Institute of Coastal Research, Helmholtz-Zentrum Geesthacht, Geesthacht, Germany
GERD KRAHMANN AND MARCUS DENGLER
GEOMAR Helmholtz Centre for Ocean Research Kiel, Kiel, Germany
JEFFREY R. CARPENTER
Institute of Coastal Research, Helmholtz-Zentrum Geesthacht, Geesthacht, Germany
(Manuscript received 20 September 2018, in final form 14 December 2018)
ABSTRACT
The turbulent dissipation rate « is a key parameter tomany oceanographic processes. Recently, gliders have
been increasingly used as a carrier formicrostructure sensors. Compared to conventional ship-basedmethods,
glider-based microstructure observations allow for long-duration measurements under adverse weather
conditions and at lower costs. The incident water velocity U is an input parameter for the calculation of the
dissipation rate. SinceU cannot bemeasured using the standard glider sensor setup, the parameter is normally
computed from a steady-state glider flight model. As « scales with U2 or U4, depending on whether it is
computed from temperature or shear microstructure, respectively, flight model errors can introduce a sig-
nificant bias. This study is the first to use measurements of in situ glider flight, obtained with a profiling
Doppler velocity log and an electromagnetic current meter, to test and calibrate a flight model, extended to
include inertial terms. Compared to a previously suggested flight model, the calibrated model removes a bias
of approximately 1 cm s21 in the incident water velocity, which translates to roughly a factor of 1.2 in estimates
of the dissipation rate. The results further indicate that 90% of the estimates of the dissipation rate from the
calibratedmodel are within a factor of 1.1 and 1.2 formeasurements derived frommicrostructure temperature
sensors and shear probes, respectively. We further outline the range of applicability of the flight model.
1. Introduction
The dissipation rate of turbulent kinetic energy is a
parameter that plays a key role in many physical and
biogeochemical processes in oceans and coastal seas.
However, direct oceanic measurements of turbulence
are relatively scarce, as most observations stem from
free-falling profilers, operated from seagoing vessels.
The monetary and labor cost of taking such profiles is
therefore substantial, and is most often limited to rela-
tively calm conditions.
An emerging alternative to ship-based profiling is the
use of ocean gliders, a class of buoyancy-driven auton-
omous underwater vehicles (Griffiths 2002, chapter 3;
Rudnick 2016). Although gliders have been increasingly
used over almost two decades, it is only recently that
turbulence profilers have been mounted onto gliders
(Wolk et al. 2009; Fer et al. 2014; Peterson and Fer 2014;
Palmer et al. 2015; Schultze et al. 2017; St. Laurent and
Merrifield 2017; Scheifele et al. 2018). The glider as a
measurement platform has relatively low levels of
vibration and mechanical noise, mainly because of the
absence of a propeller. This makes gliders suitable for
turbulence observations using shear probes. Using gliders
as an alternative to oceangoing ships removes a sub-
stantial part of the human factor in the data collection
process and therefore eases long-duration data collec-
tion while reducing costs, and it effectively removes any
measurement constraints imposed by adverse weather
conditions.
Despite the advantages of glider-based turbulence
measurements, the major drawback of this setup is the
uncertainty in the flight of the glider.A required parameterCorresponding author: Lucas Merckelbach, lucas.merckelbach@
hzg.de
FEBRUARY 2019 MERCKELBACH ET AL . 281
DOI: 10.1175/JTECH-D-18-0168.1
� 2019 American Meteorological Society. For information regarding reuse of this content and general copyright information, consult the AMS CopyrightPolicy (www.ametsoc.org/PUBSReuseLicenses).
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

in the processing of microstructure shear and temperature
measurements is the speed of flow past the sensors. The
speed through water enters the processing raised to the
fourth power when using airfoil shear probes, and to
the second power when using microtemperature sen-
sors (see section 6a for details). For free-falling vertical
profilers, this is usually determined from the rate of
change of pressure. For glider-based measurements,
this gives only the vertical speed of the glider, with a
horizontal speed that must be either measured directly
or modeled.
It is uncommon for a microstructure glider to be
equipped with a device that directly measures (a hori-
zontal component of) the speed through water, so
often a flight model is used for the computation of
turbulent dissipation (Fer et al. 2014; Peterson and Fer
2014; Palmer et al. 2015; Schultze et al. 2017; St.
Laurent and Merrifield 2017; Scheifele et al. 2018).
The most commonly used flight model is that of
Merckelbach et al. (2010), who assume a steady-state
balance between buoyancy, drag, and lift, and use the
measured pitch angle and buoyancy change achieved
by the buoyancy engine to compute the speed through
water (Fer et al. 2014; Peterson and Fer 2014; Palmer
et al. 2015; Schultze et al. 2017; Scheifele et al. 2018).
The numerical evaluation of these forces requires
values to be attributed to a number of coefficients,
such as the glider density, compressibility, drag, and lift
coefficients. Merckelbach et al. (2010) show that the
glider density, compressibility, and drag coefficients
can be determined from standard glider sensors; how-
ever, they note that it is not possible to simulta-
neously determine the lift coefficient without a direct
measurement of the horizontal component of the glider
speed.1 The model therefore relies on tabulated co-
efficients from aerodynamic studies of bodies of similar
shape in its specification of lift coefficients. To date, no
study has been published where the glider flight model
by Merckelbach et al. (2010) is calibrated and com-
pared with direct measurements of the glider velocity
through water.
In summary, glider-based turbulence microstructure
measurements represent new possibilities for sampling
ocean turbulence, but they suffer from uncertainties in
glider flight models, which are particularly sensitive,
and as yet untested. In this work a Teledyne Webb
Research Slocum Electric Shallow glider has been
fitted with a Teledyne RD Instruments (RDI) Explorer
Doppler velocity log (DVL). This device primarily
measures the horizontal and vertical components of the
glider velocity with respect to the seabed (bottom
track), provided the seabed is within the acoustic range
of about 80m. A profiling mode also allows the mea-
surement of the glider velocity relative to the water at
some distance below the glider (about 5–15m). In ad-
dition, we also utilize data collected from an electro-
magnetic current meter mounted inside a microstructure
package to assess glider flight characteristics. Using
these data we calibrate and extend the glider flight
model of Merckelbach et al. (2010) based on direct
measurements of glider flight, as well as examine the
implications for the accuracy of turbulent dissipa-
tion rate estimates as measured with glider-mounted
microstructure sensors.
2. Background: Steady-state glider flight model
Key to the work presented herein is a steady-state
planar glider flight model developed by Merckelbach
et al. (2010) in order to obtain vertical water velocities
from glider observations. The model is based on a hor-
izontal (x) and vertical (z) force balance, in which the
acceleration terms are neglected, given by 2
05 sin(u1a)FL2 cos(u1a)F
D(1)
05FB2F
g2 cos(u1a)F
L2 sin(u1a)F
D, (2)
where the pitch angle u and the angle of attack a are
defined in Fig. 1. The forces that act on the glider are due
to buoyancy FB, gravity Fg, lift FL, and drag FD:
Fg5m
gg , (3)
FB5 grfV
g[12 «
cP1a
T(T2T
0)]1DV
bpg , (4)
FD51
2rSU2ðC
D01a2C
D1Þ , (5)
FL5
1
2rSU2C
L(a) , (6)
CL(a)5 aa , (7)
where mg is the mass of the glider, g is the acceleration
due to gravity, r is the in situ density,Vg is the volume of
the glider at atmospheric pressure, «c is the coefficient of
1Depth-averaged velocities computed using surface GPS data,
as attempted by Merckelbach et al. (2010), would provide such a
measurement. However, for calibrating the lift coefficient, water
velocities along the track of the glider must be known with a bias of
less than approximately 1 cm s21, making this method unreliable.
2 This system of equations is identical to the equations given by
Merckelbach et al. (2010), if their equations are corrected for an
unfortunate sign error.
282 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 36
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

compressibility, aT is the thermal expansion co-
efficient of the glider, DVbp is the volume change
achieved by the buoyancy engine, S is the total surface
area of the wings, U is the magnitude of the glider
speed through water, and CD0and CD1
are the parasite
and induced drag coefficients, respectively. For small
a, the lift coefficient CL is assumed to be linear in the
angle of attack, proportional to the lift angle co-
efficient a.
An expression for U can be obtained by either elimi-
nating FD or FL from (1) and (2), and substituting from
(5) and (6), respectively, relating U to either drag co-
efficients or lift angle coefficients. Expressed in drag
coefficients, we get
sin(u1a)(FB2F
g)2
1
2rSU2ðC
D01C
D1a2Þ5 0: (8)
In addition, an expression for the angle of attack is found
by combining (1), and (5)–(7), yielding
a5C
D01a2C
D1
atan(u1a). (9)
Equations (8) and (9) provide a model to compute the
steady-state flight condition at any time, given mea-
surements of the buoyancy drive, pitch angle, and in situ
density, and a set of model coefficients for drag, lift,
compressibility, and thermal expansion (if applicable).
Merckelbach et al. (2010) determine model coeffi-
cients by minimizing a cost function that is mathemati-
cally identical to
R05
1
N�N21
i50
�U[i] sin(u[i]1a[i])1
dh
dt[i]
�2
. (10)
Herein, the depth rate dh/dt and pitch u are observations
with index i from a total ofN values, andU and a are the
corresponding model results using (8) and (9), respec-
tively. It can be shown, however, that the cost function
does not yield unique values if both the parasite drag
and the lift angle coefficient are present in the minimi-
zation parameter space. Although the model may be
optimized for the vertical velocity component, the hor-
izontal velocity component, and therefore the speed
through water, depends on the actual value of the lift
angle coefficient. This means that depth-rate observa-
tions alone are not sufficient to calibrate a glider flight
model that also computes accurately the glider speed
through water. Consequently, additional measurements
of a nonvertical glider velocity component are required
and are presented in section 4.
3. Dynamic glider flight model
Although the steady-state glider flight assumption
seems reasonable for most practical situations, a dy-
namic nonsteady-state glider flight model may provide a
better estimate of the glider speed for rapidly chang-
ing conditions, for example, when strong density
gradients are present or around dive-to-climb turning
points. Requiring little additional effort, such a dy-
namic flight model can be obtained by (re)inserting
the acceleration terms into the steady-state model.
Besides the glider mass accounting for its inertia, the
so-called added mass needs to be considered. Added
mass terms arise from the fact that if a submerged
body accelerates, not only does the body’s mass op-
pose the acceleration, but also the flow around the
body changes. From an energy principle, it then fol-
lows that the body does work on the ambient water
mass and additional forces act on the submerged body
(Imlay 1961). These additional forces can be conve-
niently written as a 6 3 6 mass matrix, multiplied by a
vector composed of three linear and three angular
acceleration components (Newman 1977).
For planar flight with negligible rotational accelera-
tions, which are typical for glider flight, the inertial
forces to be inserted into the dimensional steady-state
model can be simplified to M[du/dt dw/dt]T. Herein u
and w are the horizontal and vertical glider velocity com-
ponents in a georeferenced coordinate system, respec-
tively; andM is a 23 2matrix, composed of the glidermass
on the diagonal, mgI, where I is the identity matrix, and a
23 2 matrixm, representing the addedmass terms.When
expressed in the orthogonal glider referenced coordinate
FIG. 1. Schematic representation of a glider, defining an or-
thogonal coordinate system with x and z axes, and an orthogonal
glider referenced coordinate system (j, h). The latter originates
from the former after a rotation of the pitch angle. The glider path
(dashed line)makes a small angle, equal to the angle of attack, with
the glider’s principal axis, which coincides with the j axis. The
forces resulting drag, lift, and net buoyancy are drawn by the yellow
vectors. The positions of the EMC sensor and the DVL are in blue
and red, respectively. The DVL is mounted such that the principal
axis of the DVL (dashed) makes an 118 angle with the h axis.
FEBRUARY 2019 MERCKELBACH ET AL . 283
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

system, (j, h) (see Fig. 1), with its axes (from the glider’s
perspective) pointing forward and upward, the added m
for a glider-shaped object can adequately be described by a
diagonal matrix, diag(m11, m22), where m11 and m22 are
the dominant added mass components (Imlay 1961;
Newman 1977). Expressed in the (x, y) coordinate system,
the transformed m is not necessarily diagonal, and the
inertia matrix becomes
M5mgI1
"m
11cos2(u)1m
22sin2(u) (m
112m
22) cos(u) sin(u)
(m112m
22) cos(u) sin(u) m
g1m
22cos2(u)1m
11sin2(u)
#. (11)
Based on the expressions given in Imlay (1961) for a
finned prolate spheroid–shaped glider with a length of
2 m, the numerical values of the added mass terms are
estimated at m11 5 0:2mg and m22 5 0:92mg.
With this result the dynamic flight model can be
written as [see (1), (2)]
Md
dt
�u
w
�5
"sin(u1a)F
L2 cos(u1a)F
D
FB2F
g2 cos(u1a)F
L2 sin(u1a)F
D
#.
(12)
To integrate this initial value problem using a classi-
cal Runge–Kutta (RK4) explicit method, we specify
u5w5 0 as initial conditions and when the glider is at
the surface. Furthermore, the incident flow velocity is set
equal to U5ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiu2 1w2
p. In fact, this is true only if the
water column behaves as a steady-state flow without
shear. However, under most conditions the oceanic shear
is small so that the errors of the estimated lift and drag
forces can be assumed small too. We also note that
transient effects caused by changing flow conditions on
the drag and lift forces generated are not accounted for.
Both the steady-state and dynamic models are im-
plemented in Python 3. The source code, documentation,
and examples are available at a public repository under
the MIT software license (Merckelbach 2018a,b).
4. Experimental data
a. Instrumentation
The glider COMET is a Teledyne Webb Research G2
shallow electric glider that is equipped with a Sea-Bird
Scientific glider payload CTD, a Rockland Scientific
MicroRider, and a profiling Teledyne RDI 600-kHz
phased array Explorer DVL. The CTD received a firm-
ware update allowing it to sample at 1Hz, rather than the
default 0.5Hz.A thermal lag correction algorithm, similar
to that described by Garau et al. (2011), was applied to
correct themeasured conductivity within the conductivity
cell. TheMicroRider sampled pressure and pitch at 64Hz.
The DVL mounted on glider COMET measured ve-
locities acoustically along four beams in a Janus config-
uration at a 308 angle. The device was mounted in a
separate hull section, placed in front of the science bay
(Fig. 1). Since the DVL is primarily designed to mea-
sure bottom-track velocities, it was installed downward
looking and mounted with a forward pitch angle of 118.The mounting angle ensures that if the glider is at a
nominal dive angle of 268, then the principal axis of the
tetrahedron defined by three of its beams is aligned with
the vertical ordinate.
Besides measuring bottom-track velocities, the DVL
was configured (by means of a firmware upgrade) to
collect three-dimensional current profiles, like a classi-
cal acoustic Doppler current profiler (ADCP). The
DVL was set up to continuously record ensembles, each
consisting of 10 profile pings with a bin size of 2m and
two bottom-track pings. With a typical ping rate of 7Hz
(Teledyne RD Instruments 2017), the measurement
time of an ensemble amounted to up to 1 s, during which
the vertical distance traveled by the glider was about
10–15 cm. The realized sample rate of the ensembles was
between once per 4 and 3s, indicating a significant amount
of time required to process and store the ensemble data.
According to the DVL’s datasheet, the standard de-
viations for single-bottom-track and velocity profile pings
are 1.0 and 4.7 cms21, respectively. For the configuration
used, the standard deviation of the profile velocity rela-
tive to the seabed, computed from an ensemble, amounts
to 1.7 cms21, assuming that all pings can be treated as
independent variables. As this is calculated for ideal
conditions, we use a more conservative value, estimated
at s5 2:5 cms21, allowing for additional uncertainty re-
sulting from vertical shear, horizontal heterogeneity of
the flow, and pitch, heading, and roll readings.
The DLV measurements are georeferenced using the
pressure measured by the glider, after correcting for a
small delay of about 3 s inDVLmeasurements. The time
delay was computed for each profile by matching the
glider and DVL time stamps of the pitch, a parameter
that is measured by the glider’s attitude sensor and fed
into the DVL.
RawDVL data were subjected to a number of quality-
checking algorithms to mask low-quality data as well as
data correction algorithms. Following Todd et al. (2017), a
pipeline of operations was set up to correct the speed of
284 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 36
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC
sound using the salinity measured by the glider; to correct
for offsets in roll and pitch; to mask relative water veloci-
ties and bottom-track velocities that exceed 0.75ms21; to
mask velocities for which the signal-to-noise ratio (SNR) is
smaller than 3, where SNR5 10(SdB2NdB)/10 with SdB and
NdB as the signal and noise levels (dB), respectively; and,
finally, to mask velocities, the signal levels of which ex-
ceed 75dB. It is noted that in this work, the SNR
threshold was set more permissively to 3, rather than 20
as used in Todd et al. (2017).
To compute eastward, northward, and upward velocity
components, theDVLuses heading, pitch, and roll angles
that are reported by the glider. It was found that the
difference between the upward bottom-track velocity and
the depth rate was positively biased for upcasts and
negatively biased for downcasts. It turned out that the tilt
sensor had leaked a small amount of electrolyte fluid, so
pitch and roll angles were reported larger than they were
in reality. The associated error in the pitch and roll angles
is proportional to their real values (D. Pheifer 2018,
personal communication). Matching upward bottom-
track velocity and depth rate yielded a scaling factor of
0.83. Prior to the step to correct the pitch and roll offsets
in the processing pipeline, the DVL velocities were
recomputed using scaled pitch and roll angles.
The glider IFM03 is a Teledyne Webb Research G1
deep glider (short version) equipped with an unpumped
Sea-Bird CTD and a Rockland Scientific MicroRider
(similar to the onemounted on top of the glider COMET).
Added to this MicroRider (by Rockland Scientific) was an
electromagnetic current (EMC) sensor (AEM1-G, by
JFE Advantech Co., Ltd). CTD data were recorded at a
sample rate of 1Hz and were corrected for thermal
lag effects following Garau et al. (2011). The relevant
MicroRider data (pitch, pressure, and EMC velocity)
were logged at a rate of 64Hz.
The EMC sensor measures the axial speed of the glider
through the water. The sensor was calibrated in a water
tank by the manufacturer JFEAdvantech. This was done
by towing the EMC sensor mounted to aMicroRider hull
at different speeds through the tank. Although the EMC
sensor is sampled at 64Hz, the sensor itself has a mea-
surement frequency of 15Hz. During the postprocessing
the velocity measurements were averaged to yield a time
series with a frequency of 1Hz, with each sample being
the average of about 10–15 individualmeasurements. The
accuracy of the velocity measurements claimed by
Rockland Scientific (2017) is 0.5 cm s21 or 2% of the
readings, without stating the measurement bandwidth.
It is therefore not clear how much averaging of raw data
samples is required to obtain this accuracy. We assume
that the uncertainty in the EMC readings is 1 cm s21 or
better for the velocity data averaged to 1-Hz time series.
b. Datasets
For the analysis of the glider flightmodel three datasets
were selected (see Fig. 2 and Table 1 for a summary).
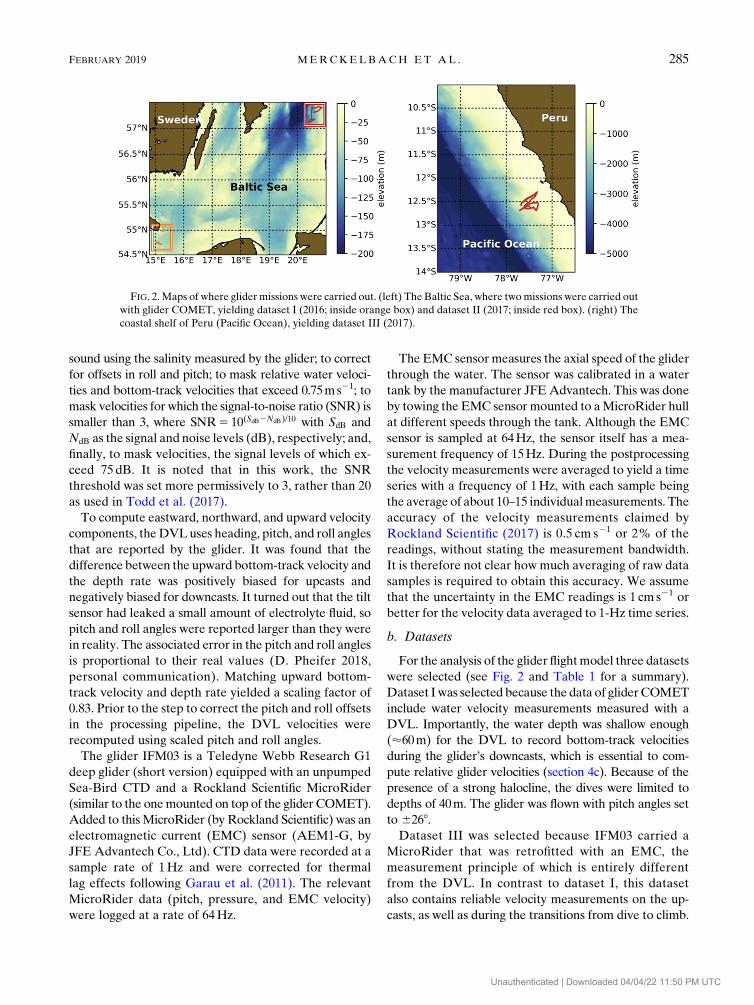
Dataset I was selected because the data of gliderCOMET
include water velocity measurements measured with a
DVL. Importantly, the water depth was shallow enough
(’60m) for the DVL to record bottom-track velocities
during the glider’s downcasts, which is essential to com-
pute relative glider velocities (section 4c). Because of the
presence of a strong halocline, the dives were limited to
depths of 40m. The glider was flown with pitch angles set
to 6268.Dataset III was selected because IFM03 carried a
MicroRider that was retrofitted with an EMC, the
measurement principle of which is entirely different
from the DVL. In contrast to dataset I, this dataset
also contains reliable velocity measurements on the up-
casts, as well as during the transitions from dive to climb.
FIG. 2.Maps of where glider missions were carried out. (left) The Baltic Sea, where twomissions were carried out
with glider COMET, yielding dataset I (2016; inside orange box) and dataset II (2017; inside red box). (right) The
coastal shelf of Peru (Pacific Ocean), yielding dataset III (2017).
FEBRUARY 2019 MERCKELBACH ET AL . 285
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

This glider was programmed to dive to 800m, or when
limited by topography to 15m above the seabed. From
this dataset we selected a sequence of profiles where the
glider dives to the full 800m. The glider was flown with
fixed battery positions, resulting in typical downcast and
upcast pitch angles of 328 and 288, respectively.Dataset II used the same glider setup as dataset I;
however, the glider was flown in water depths that were
too large to obtain bottom-track velocities for most of
the profiles. Hence, the DVL data from this dataset are
not used. This dataset is still of interest, because the day
prior to recovery was used to fly the glider for short
periods at two different pitch angles than the standard
268—namely, 6208 and 6308—in order to quantify the
effects of the induced drag.
c. Relative glider velocities from DVL measurements
The velocity profile data, configured to be outputted
by the DVL as eastward, northward, and upward ve-
locity components, represent the water velocity relative
to the glider. The first bin is found at 2.92m from the
transducer. However, the data from the first two bins
often show a signal that is distinctively different from the
other bins and therefore the first two bins are excluded
from the analysis to follow. The echoes from bins posi-
tioned farther away than about 15m were often weak,
not yielding a signal with a sufficiently high signal-to-
noise ratio. As a result, the typical range for which
meaningful data were obtained is some 7–15m away
from the glider. In the presence of significant vertical
shear, the relative velocity of the glider measured by the
DVL from a particular depth may not represent the
actual relative velocity at the depth of the glider. To
improve the estimates of the relative water velocity at
the glider’s position, we used the following approach.
Consider a glider collecting data using a downward-
looking DVL while diving (Fig. 3). When a profile en-
semble is collected, water velocities relative to the glider
are measured at a distance of about 10m below the
glider and turned into absolute water velocities by ac-
counting for the absolute glider velocity using the
bottom-track velocity. Some hundreds of seconds later,
assuming a nominal depth rate of 10 cm s21, the glider
reaches a depth at which it previously collected velocity
data. On the assumption that vertical changes in cur-
rents are much greater than horizontal changes, we
estimate the water velocity at the current glider’s depth
from previously collected profile ensembles and then
compute the relative glider velocity by subtracting the
glider absolute velocity (bottom-track velocity) at
this depth.
The drawback of this method is that in estimating the
water velocity components at the glider’s position, an
average is constructed from profile ensembles taken
100–200 s earlier. No tendencies, or ‘‘future’’ profile
ensemble data are taken into account. As an alternative,
we also implemented a simple Kalman filter. A Kalman
filter operates by propagating the mean and covariance
of a state using a dynamic model, in an optimal way,
given a time series of observations of the process (see,
e.g., Anderson and Moore 2005; Simon 2006). As for a
dynamicmodel we choose a simple one: the acceleration
of a current component (eastward, northward, or up-
ward) at a given depth is constant, with a model un-
certainty of s2 5 13 10216 m2 s24 to reflect the fact that
the model is only approximate in describing the real sys-
tem. The state vector consists of a velocity component at a
given depth and the corresponding acceleration. This filter
is run for each component and depth bin separately, using
measurements of the water velocity when they become
available. The variance of the measurement noise is esti-
mated at s2 5 0:0252 m2 s22; see also section 4a. The filter
is implemented as a forward–backward smoother, or a so-
called RTS filter after Rauch, Tung, and Striebel who
presented this filter in 1965; see Simon (2006). This filter is
first run forward and then backward in time, making
maximal use of available data.
In comparison with the Kalman filter, the averaging
method is much simpler to implement and is also compu-
tationally considerably more efficient. The Kalman filter
method, however, produces smoother, less noisy data and
has been used in the results reported in this work.
d. Incident water velocity from EMC measurements
The one-dimensional EMC sensor measures the ve-
locity component along the principal axis of the glider
(the j axis; see Fig. 1). Therefore, the incident water
velocity derived from this sensor UEMC relates to the
actual measured velocity UEMC, as
UEMC
5U
EMC
cos(a). (13)
TABLE 1. Dates and regions of the datasets used.
Dataset Glider Velocity sensor Region Start End
I COMET DVL Baltic Sea (southwest) 20 Jun 2016 26 Jun 2016
II COMET — Baltic Sea (central) 19 Oct 2017 28 Oct 2017
III IFM03 EMC Peru 29 Apr 2017 23 May 2017
286 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 36
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

Since a is not measured, values computed from the
steady-state model, for example, can be used instead.
These are generally small, so cos(a)5 11O (a2). How-
ever, it is noted that as a result of local shear, the angle of
attack may not always be small, leading to (13) being a
lower-bound estimate of the actual incident velocity.
During the processing of the EMC data, it was found that
the vertical water velocity computed from UEMC and the
glider’s pitch anglewas consistently larger inmagnitude than
the measured depth rate. In contrast to the glider COMET,
we have confidence in the pitch angles reported by glider
IFM03, as they were nearly identical to the pitch angles re-
ported by its MicroRider sensor. Therefore, we applied a
scaling factor to the velocities reported by the EMC so that
the difference between the vertical velocity component and
the depth rate vanishes. Using the angle of attack estimated
from the steady-state model (with lift angle and induced
drag settings found for glider COMET; see next section),
the factor was found to be equal to 0.93. A similar scaling
factor was found by the MircoRider’s manufacturer during
tests with a SeaExplorer glider with a built-in MicroRider
fitted with an EMC sensor, and an additionally mounted
ADCP (R. Lueck 2018, personal communication).
5. Glider flight model calibration and results
It is not possible to find optimal choices for both CD0
and a when using only the depth-rate measurement as
a model constraint; an additional velocity measurement
with a significant orthogonal (horizontal) component is re-
quired. In this section we use measurements of the incident
water velocity as an additionalmodel constraint to calibrate
for the lift angle coefficient. This is done first for the DVL
measurements and then for the EMC measurements.
Numerical values of drag and lift coefficients have a
meaning only, if referenced to a known surface area S
[see also (5) and (6)]. In this study we follow the con-
ventions used in aerodynamics and use the surface area
of the wings as reference area, giving S5 0:1 m2. An-
other choice for S could be the frontal area. To express
drag and lift coefficients, referenced to the frontal area,
the numerical values found in this study are to be mul-
tiplied by the ratio of wing area to frontal area.
In the subsections below, the value forCD1used by the
flight models is preset to 10.5 rad22, in anticipation of
the result presented at the end of this section, where we
also estimate the optimal value of CD1.
a. Lift angle coefficient
A simple approach is taken to estimate the optimal
value of a. To that end, an additional cost function R1 is
defined as
R15
1
N�N21
i50
(U[i]2UDVL
[i])2 , (14)
where UDVL[i] is the incident water velocity derived
from the DVL measurements with i. The cost function
FIG. 3. Construction of water current profiles, expressed in a geographic Cartesian reference frame, as measured
by a profiling glider. The dashed line represents the glider’s path. (left) Current profiles are measured during the
downcast only. (right) A zoomed-in view of the rectangle in the left panel. At t5 200 s, the glider (indicated by the
open circle) collects an absolute velocity profile, of which usable data are delineated by the dashed rectangle. Some
hundreds of seconds later, the absolute velocity at the depth of the glider (solid circle) can be estimated from
previousmeasurements (shaded rectangle). Subtracting the bottom-track velocity from the thus estimated absolute
velocity yields the relative velocity.
FEBRUARY 2019 MERCKELBACH ET AL . 287
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

R0 [(10)] is minimized for the parameter space
fCD0, mgg, for a range of preset values of a. Then, for
each triplet (CD0, mg, a), the cost functionR1 is evaluated.
Figure 4 summarizes the results of these successive
minimization steps, using the steady-state model (solid
lines) and the dynamic model (dashed lines) applied to
data from a subinterval of 4 h of data collected on
23 June 2017. The figure shows the optimal values for the
parasite drag coefficient and the mass (by minimizing
R0) for a range of preset values of a. It is seen that the
mass is independent of the value of the lift angle co-
efficient but that the drag coefficient is not. Moreover,
the steady-state model estimates lower values for CD0
than the dynamic model does, the explanation of
which is left for section 5c. The optimal value for a
(for which R1 is minimal) is found to be a’ 7:4 rad21,
for both models, where also the mean difference be-
tween the modeled and observed incident velocity is
approximately zero.
We can now repeat the procedure to determine the
glider flight model parameters CD0, mg, and a, but using
the EMC-derived incident velocity instead as the re-
quired nonvertical velocity component. The results are
shown in Fig. 5 and are found to be in line with the re-
sults obtained from the DVL data (cf. Fig. 4). The data
show a similar relationship between the optimized lift
and drag coefficients, and the mass appears to be in-
dependent of the lift angle coefficient. For this glider
(IFM03) an unbiased difference between measured and
modeled incident velocities is found for a5 7:5 rad21,
which is slightly higher than found for glider COMET.
In contrast to theDVL, the EMC provides continuous
velocity data on both the up- and downcasts, so that R0
can be modified to include a nonvertical velocity com-
ponent, yielding
R25
1
N�N21
i50
k
�U[i] sin(u[i]1a[i])1
dh
dt[i]
�2
1 (12 k)(U[i]2UEMC[i])2 , (15)
where k is a weighting coefficient, set to k5 1/2, giving
both velocity components equal importance assuming
that the accuracy of their measurements is similar. The
additional constraint allows for minimizing R2 for the
parameter tripletCD0,mg, and a simultaneously, yielding
CD05 0:136,mg 5 59:454 kg, and a5 7:7 rad21, indicated
by the cross symbols in Fig. 5.
The values for the lift angle coefficient, found for the
gliders COMET (DVL) and IFM03 (EMC), are only
slightly different. Figures 4 and 5 show, however, that
a variation in a of 1 rad21 would lead to a bias in the
incident velocity of approximately 6 and 3mms21 for
gliders COMET and IFM03, respectively. Given the
uncertainties in the velocity measurements, we consider
these findings to be consistent.
b. Induced drag coefficient
The induced drag coefficient CD1is another shape
parameter, the setting of which may influence the results
after calibrating themodel formg,CD0, and a. From (9) it
follows that the effect of the induced drag can be ab-
sorbed into the parasite drag coefficient if the glider is
flown with pitch angles that are similar in magnitude for
the up- and downcasts and (near) constant over time. In
most cases this is how gliders are operated, and this
second-order effect has little consequence on the model
FIG. 4. Dependency of mg and CD0on a (left ordinate axes), and corresponding mean and
standard deviations of the difference between the modeled and measured (DVL) incident
velocity as well asR1 (right ordinate axes). Results are shown for the steady-statemodel (solid
lines) and the dynamic model (dashed lines). The mean of the incident velocity difference is
denoted by mDU .
288 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 36
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

results. However, when operating gliders with micro-
structure sensors, the pitch battery position is usually
fixed to avoid vibrations that can interfere with shear
probe measurements during the moving of the pitch
battery. As a consequence, especially for deep glider
profiles, the pitch anglemay vary substantially as a result
of changes in the in situ water density and compression
of the hull, so changes in flight resulting from the in-
duced drag depend on the depth. The compressibility of
the hull also causes the flight to change with depth, and
hence it is difficult to distinguish between both effects.
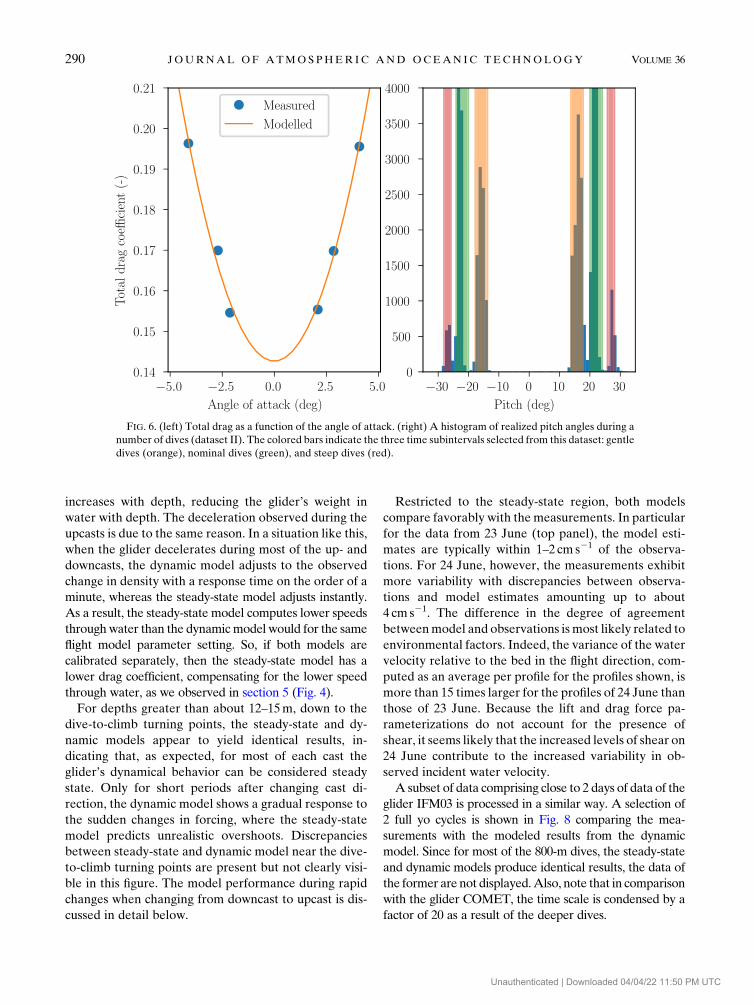
At the end of the glider experiment in dataset II, the
pitch settings of the glider COMET were varied. Over
the course of a day, the target pitch was changed to three
values—ut 5 168, 198, 278—where the absolute values of
the target pitch angles ut were the same for up- and
downcasts. Using a5 7:5 rad21 as found previously, the
glider flight model was calibrated for the mass and total
drag coefficient, CD 5CD01a2CD1
, for the three sub-
sets, each having a narrow range of pitch angles; see
Fig. 6, right panel. The optimization routine yields for
each pitch band a different value for CD. Since the angle
of attack can be assumed more or less constant within
each pitch band, CD can be plotted as a function of the
corresponding angle of attack; see the blue dots in Fig. 6,
left panel. As the induced drag effect is proportional to
the angle of attack squared, a parabola is fitted to the
data, yielding CD05 0:147 and CD1
5 10:5 rad22. The
value found for the induced drag coefficient is signifi-
cantly higher than the one estimated by Merckelbach
et al. (2010), who suggested a total value for the induced
drag of about 3 rad22. The discrepancy is most likely to
be due to the protruding features that the glider has,
such as the tail fin, the CTD, and, most importantly, the
Microrider package, which was not considered by
Merckelbach et al. (2010).
Like the parasite drag coefficient, the induced drag
coefficient is likely to change when the vehicle gets
biofouled. The value quoted here was determined for a
glider without noticeable biofouling. But, as argued
before, the effect caused by the induced drag is of
second-order importance, and some change in the in-
duced drag coefficient caused by biofouling is likely to
be insignificant.
c. Results
After calibrating the flight model for mass, parasite,
and induced drag coefficients, and lift angle coefficients
above, we use subsets of the data and solve both the
steady-state and dynamic model to yield time series of
incident water velocities. By comparing the time series
withmeasurements, we can assess themodel performance.
First, we compare the model results with measure-
ments obtained with the DVL for two subsets of about 4
and 9h of data, respectively. Measurements and model
results are shown in Fig. 7 for two intervals comprising
four full yos down to 40m of water depth spanning
about 30min on 23 June 2017 (top panels) and on
24 June 2017 (bottom panels), respectively. The incident
water velocity computed from the DVL measurements
is available only for water depths in excess of about 10m
and during downcasts. The DVL measurements (blue
curves, left panel) show that the glider quickly gains
speed when starting the downcast and then gradually
slows down as it gets deeper. This deceleration is also
reproduced in the incident water velocities computed by
the steady-state model (orange) and the dynamic model
(red). The reason for this is that the in situ density
FIG. 5. Dependency of mg and CD0on a (left ordinate axes), and corresponding mean and
standard deviations of the difference between the modeled and measured (EMC) incident
velocity as well as R1 (right ordinate axes). The cross symbols indicate the results of a
minimization of R2.
FEBRUARY 2019 MERCKELBACH ET AL . 289
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC
increases with depth, reducing the glider’s weight in
water with depth. The deceleration observed during the
upcasts is due to the same reason. In a situation like this,
when the glider decelerates during most of the up- and
downcasts, the dynamic model adjusts to the observed
change in density with a response time on the order of a
minute, whereas the steady-state model adjusts instantly.
As a result, the steady-state model computes lower speeds
throughwater than the dynamicmodel would for the same
flight model parameter setting. So, if both models are
calibrated separately, then the steady-state model has a
lower drag coefficient, compensating for the lower speed
through water, as we observed in section 5 (Fig. 4).
For depths greater than about 12–15m, down to the
dive-to-climb turning points, the steady-state and dy-
namic models appear to yield identical results, in-
dicating that, as expected, for most of each cast the
glider’s dynamical behavior can be considered steady
state. Only for short periods after changing cast di-
rection, the dynamic model shows a gradual response to
the sudden changes in forcing, where the steady-state
model predicts unrealistic overshoots. Discrepancies
between steady-state and dynamic model near the dive-
to-climb turning points are present but not clearly visi-
ble in this figure. The model performance during rapid
changes when changing from downcast to upcast is dis-
cussed in detail below.
Restricted to the steady-state region, both models
compare favorably with themeasurements. In particular
for the data from 23 June (top panel), the model esti-
mates are typically within 1–2 cm s21 of the observa-
tions. For 24 June, however, the measurements exhibit
more variability with discrepancies between observa-
tions and model estimates amounting up to about
4 cm s21. The difference in the degree of agreement
betweenmodel and observations is most likely related to
environmental factors. Indeed, the variance of the water
velocity relative to the bed in the flight direction, com-
puted as an average per profile for the profiles shown, is
more than 15 times larger for the profiles of 24 June than
those of 23 June. Because the lift and drag force pa-
rameterizations do not account for the presence of
shear, it seems likely that the increased levels of shear on
24 June contribute to the increased variability in ob-
served incident water velocity.
A subset of data comprising close to 2 days of data of the
glider IFM03 is processed in a similar way. A selection of
2 full yo cycles is shown in Fig. 8 comparing the mea-
surements with the modeled results from the dynamic
model. Since for most of the 800-m dives, the steady-state
and dynamic models produce identical results, the data of
the former are not displayed.Also, note that in comparison
with the glider COMET, the time scale is condensed by a
factor of 20 as a result of the deeper dives.
FIG. 6. (left) Total drag as a function of the angle of attack. (right) A histogram of realized pitch angles during a
number of dives (dataset II). The colored bars indicate the three time subintervals selected from this dataset: gentle
dives (orange), nominal dives (green), and steep dives (red).
290 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 36
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC
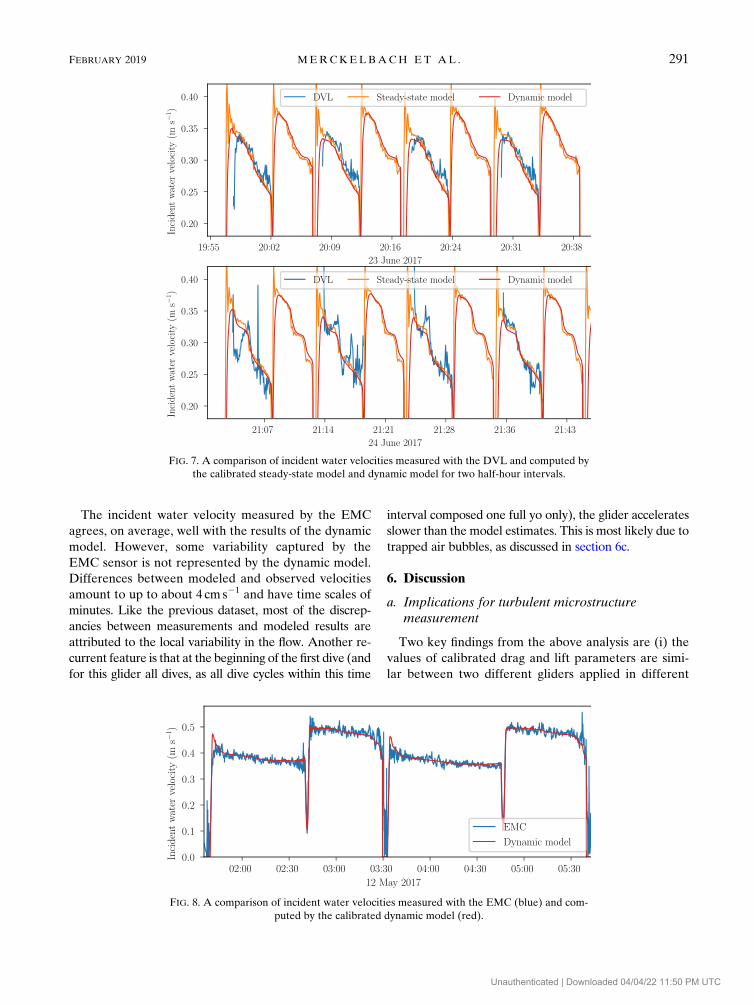
The incident water velocity measured by the EMC
agrees, on average, well with the results of the dynamic
model. However, some variability captured by the
EMC sensor is not represented by the dynamic model.
Differences between modeled and observed velocities
amount to up to about 4 cm s21 and have time scales of
minutes. Like the previous dataset, most of the discrep-
ancies between measurements and modeled results are
attributed to the local variability in the flow. Another re-
current feature is that at the beginning of the first dive (and
for this glider all dives, as all dive cycles within this time
interval composed one full yo only), the glider accelerates
slower than the model estimates. This is most likely due to
trapped air bubbles, as discussed in section 6c.
6. Discussion
a. Implications for turbulent microstructuremeasurement
Two key findings from the above analysis are (i) the
values of calibrated drag and lift parameters are simi-
lar between two different gliders applied in different
FIG. 7. A comparison of incident water velocities measured with the DVL and computed by
the calibrated steady-state model and dynamic model for two half-hour intervals.
FIG. 8. A comparison of incident water velocities measured with the EMC (blue) and com-
puted by the calibrated dynamic model (red).
FEBRUARY 2019 MERCKELBACH ET AL . 291
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

conditions, and (ii) the time series show good agree-
ment between the observed and modeled glider speed
through waterU. A question that naturally arises is what
errors a (calibrated) glider flight model then produces in
U, and what implications this has for estimates of the
dissipation rate from temperature and shear micro-
structure. These errors add to the uncertainty of the
dissipation rate measurements over that for standard
free-fall profilers, where the speed along the sensors is
estimated from the pressure rate of change. Although
not rigorously derived, the uncertainties of free-fall
profilers are generally estimated at a factor of approxi-
mately 2 (Dewey and Crawford 1988;Moum et al. 1995).
To estimate the errors produced from deviations in
the measured and modeled glider speeds, we first note
the scaling of the dissipation rate « with the flow speed
past the sensors, U. For « measured with airfoil shear
probes,
«515
2n
�›y
›x
�2
, (16)
where x represents the distance in the glider path di-
rection, y denotes across-path velocity fluctuations, n is
the kinematic viscosity, and the bar denotes a mean. The
probe returns a signal E(t) that is proportional to the lift
force on the probe (Uy), so we can express the across-
path velocities as y}E/U. Spatial gradients of y are then
found using Taylor’s frozen turbulence hypothesis,
whereby
›y
›x5
1
U
›y
›t}
1
U2
›E
›t. (17)
Therefore,
«}1
U4
�›E
›t
�2
, (18)
showing that « scales with the fourth power of the flow
speed past the sensors and that it will thus be sensitive to
errors in its estimation. Note that if « is measured by
using microstructure temperature sensors (Gregg 1999;
Ruddick et al. 2000), then «}U22 as a result of the lack
ofU dependence arising from the lift force in the case of
shear probes.
Errors in the estimation of « arising from deviations
between the glider flight model and the true speed
through water will therefore appear through the factor
(Umeas/Udyn)n, where n5 f2, 4g for measurements from
microstructure temperature sensors and shear probes,
respectively, and the U ratio corresponds to the mea-
sured speed to that obtained from the dynamic model.
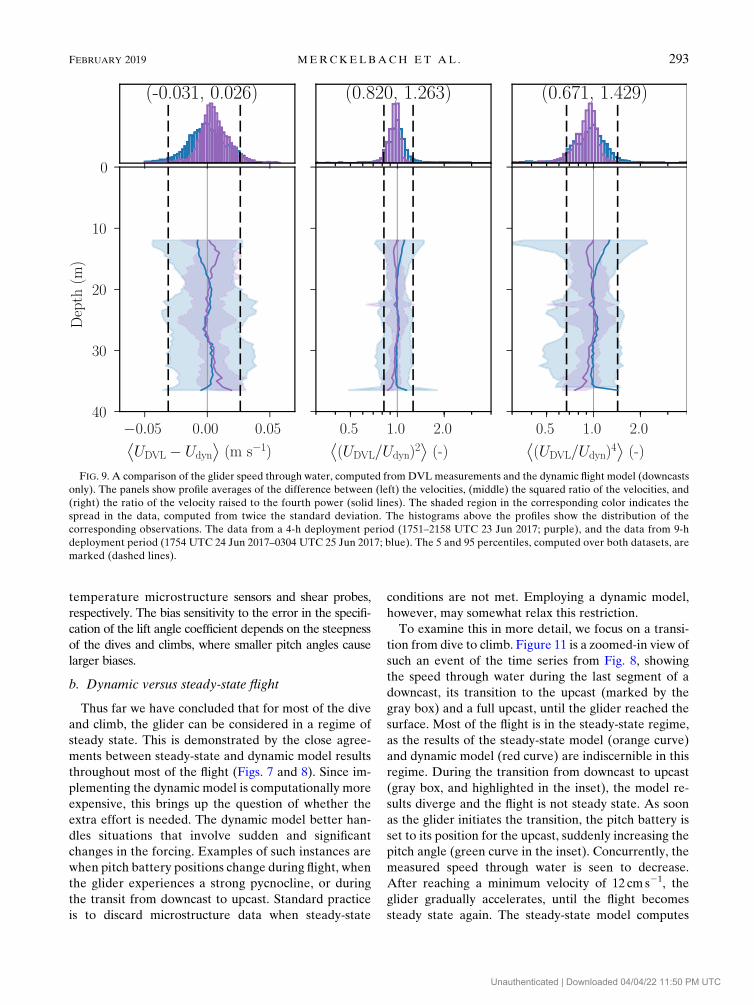
These factors are computed as profile averages (in-
dicated by angled braces) in Fig. 9 from the DVL da-
tasets. It shows averages as solid lines with the shaded
area indicating twice the standard deviation in the data
for both DVL datasets. Depths shallower than 12m are
not shown, since no reliable DVL data can be collected
(see also section 4c). Although some bias toward positive
or negative differences—amounting to close to 1cms21—
exists, the bias is not systematic, as it is different for two
consecutive deployments. When multiple deployments
are considered, there is negligible bias in the difference
between mean measured and modeled speeds.
The histograms in Fig. 9 show that 90% of the errors
expected in dissipation rate estimates as a result of
modeled glider speeds are within a factor of 0.67–1.43
for shear probe measurements (n5 4) and within 0.82–
1.26 for temperature microstructure (n5 2). These er-
rors should be compared to the factor-of-2 uncertainty
normally associated with dissipation rate measurements
from vertical profilers (Dewey and Crawford 1988;
Moum et al. 1995). In addition, it is not clear how much
of this difference between modeled and measured
speeds can be attributed to the need to use DVL mea-
surements that are not coincident in time and space with
the glider position, and require averaging to reduce
measurement noise.
An advantage the EMC sensor has over the DVL is
that it measures velocities collocated in time and space
with the glider flight model. As long as the instanta-
neous angle of attack remains small, themeasured quantity
represents the glider speed through water, an assumption
we havemade in the analysis. The same profile averaged
quantities as in Fig. 9, but now for the EMC sensor, are
shown in Fig. 10. For depths deeper than 150m, we also
find unbiased results, with error ratios that have a
smaller spread than for the DVL [i.e., 90% of the data
lie in the ranges of 0:83, h(UEMC/Udyn)4 , 1:20 and
0:91, h(UEMC/Udyn)2 , 1:09]. The velocity measure-
ments made by the EMC sensor have a standard de-
viation that is about an order of magnitude smaller than
the readings from the DVL (section 4a), so this suggests
that a fraction of the spread of the data observed for the
DVL (and possibly also for the EMC) could be due to
uncertainty in the measurements.
If the steady-state model were applied to the pres-
ent data but using a lift angle coefficient of 6.1 rad21
(Merckelbach et al. 2010), then the bias in the differ-
ence between measured and modeled incident veloci-
ties would be 1.3 and 0.5 cm s21 for datasets I (Fig. 4)
and III (Fig. 5), respectively. The associated biases
in the estimates for the dissipation rate applied to
dataset I (dataset III) would an underestimation of a
factor of 1.10 (1.05) and 1.20 (1.07) for estimates from
292 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 36
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC
temperature microstructure sensors and shear probes,
respectively. The bias sensitivity to the error in the specifi-
cation of the lift angle coefficient depends on the steepness
of the dives and climbs, where smaller pitch angles cause
larger biases.
b. Dynamic versus steady-state flight
Thus far we have concluded that for most of the dive
and climb, the glider can be considered in a regime of
steady state. This is demonstrated by the close agree-
ments between steady-state and dynamic model results
throughout most of the flight (Figs. 7 and 8). Since im-
plementing the dynamic model is computationally more
expensive, this brings up the question of whether the
extra effort is needed. The dynamic model better han-
dles situations that involve sudden and significant
changes in the forcing. Examples of such instances are
when pitch battery positions change during flight, when
the glider experiences a strong pycnocline, or during
the transit from downcast to upcast. Standard practice
is to discard microstructure data when steady-state
conditions are not met. Employing a dynamic model,
however, may somewhat relax this restriction.
To examine this in more detail, we focus on a transi-
tion from dive to climb. Figure 11 is a zoomed-in view of
such an event of the time series from Fig. 8, showing
the speed through water during the last segment of a
downcast, its transition to the upcast (marked by the
gray box) and a full upcast, until the glider reached the
surface. Most of the flight is in the steady-state regime,
as the results of the steady-state model (orange curve)
and dynamic model (red curve) are indiscernible in this
regime. During the transition from downcast to upcast
(gray box, and highlighted in the inset), the model re-
sults diverge and the flight is not steady state. As soon
as the glider initiates the transition, the pitch battery is
set to its position for the upcast, suddenly increasing the
pitch angle (green curve in the inset). Concurrently, the
measured speed through water is seen to decrease.
After reaching a minimum velocity of 12 cm s21, the
glider gradually accelerates, until the flight becomes
steady state again. The steady-state model computes
FIG. 9. A comparison of the glider speed through water, computed from DVLmeasurements and the dynamic flight model (downcasts
only). The panels show profile averages of the difference between (left) the velocities, (middle) the squared ratio of the velocities, and
(right) the ratio of the velocity raised to the fourth power (solid lines). The shaded region in the corresponding color indicates the
spread in the data, computed from twice the standard deviation. The histograms above the profiles show the distribution of the
corresponding observations. The data from a 4-h deployment period (1751–2158 UTC 23 Jun 2017; purple), and the data from 9-h
deployment period (1754 UTC 24 Jun 2017–0304 UTC 25 Jun 2017; blue). The 5 and 95 percentiles, computed over both datasets, are
marked (dashed lines).
FEBRUARY 2019 MERCKELBACH ET AL . 293
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

false behavior during the transition. The dynamic model,
however, does reproduce the dip in speed.
c. Flight model error sources
Although errors in the velocity measurements lead to
discrepancies between measured and modeled incident
velocities, some of these discrepancies can be related to
the model failing to capture all aspects of the glider
flight. For water depths less than 150m, discrepancies
between observed and modeled velocities are very
clearly present in the dataset of glider IFM03 (Fig. 10). It
is unlikely that these discrepancies can be related to
inaccurate velocity measurements. It is, however, a
known issue for Slocum gliders with an oil-based dis-
placement pump, such as the glider IFM03, that air can
diffuse into the oil system. Air bubbles in the oil system
will lead to inaccurate reporting of the actual glider
volume change, causing the flight model to compute
erroneous buoyancy forces and as a result erroneous
flight velocities. Because there is currently no way to
measure how much air is present, and where it resides,
this aspect is not included in the flight model. The effect
of air bubbles can be identified by comparing the com-
puted vertical glider velocities with the observed depth
rate; if calibrated for deep dives, the presence of air
bubbles manifests itself as a bias in the vertical velocity
difference during the shallower part of the dives.
A further assumption underlying both the steady-
state and dynamic flight models is that the ocean cur-
rents are steady and free of shear. The consequence is
that in the presence of, for example, vertical shear and
internal waves with short periods, the inertia of the
glider can cause the instantaneous incident velocity to
be significantly different from the modeled incident
velocity, introducing errors in the drag and lift forces
computed by the model. Unfortunately, this issue is not
remedied by the dynamic model developed herein, de-
spite having the inertial terms included. This is because
the model cannot discern between the glider velocity in
an inertial frame, the time derivative of which equals the
acceleration, and the incident water velocity (relative to
the glider), which is used in the parameterizations of the
lift and drag forces. The results shown in Figs. 7 and 8
indicate that the discrepancies observed between the
FIG. 10. A comparison of the glider speed throughwater, computed fromEMCmeasurements and the dynamic flightmodel. The panels
show profile averages of the difference between (left) the velocities, (middle) the squared ratio of the velocities, and (right) the ratio of the
velocity raised to the fourth power (solid lines). The shaded region in the corresponding color indicates the spread in the data, computed
from twice the standard deviation. The downcasts (blue) and upcasts (red) are indicated. The histograms above the profiles show the
distribution of the corresponding observations. The 5 and 95 percentiles, computed over both the down- and upcasts combined, are
marked (dashed lines). The data encompass a 45-h period (0020 UTC 12 May–2113 UTC 13 May 2017).
294 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 36
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

measured incident velocities and the dynamic model
results occur on time scales on the order of 1–10min,
and are likely caused by the model failing to capture
the effects caused by an unsteady ocean.
The present measurements suggest that the steady
ocean assumption introduces errors in the estimates of
the dissipation rate that are within acceptable levels
given the current uncertainties in microstructure esti-
mates. This may not be true anymore for more dynamic
environments than those encountered in this study, so in
those conditions measuring the dissipation rate with an
acceptable accuracy may still require direct measure-
ments of the glider flight.
7. Conclusions
This study is the first to use measurements of in situ
glider flight to test, calibrate, and extend a glider flight
model. Our principal motivation is to quantify and
reduce uncertainties in the use of flight models for tur-
bulent microstructure studies. Calibration of the steady-
state model of Merckelbach et al. (2010) resulted in
changes in the lift angle coefficient to a5 7:5 rad21 as
well as the induced drag coefficient CD15 10:5 rad21.
This change in the value of the lift angle coefficient from
that reported in Merckelbach et al. (2010) results in a
reduction of the difference between measured and
modeled incident water velocities of about 0.5–1.3 cms21.
Measurements of in situ glider flight allow us to quantify
errors in dissipation rate calculations associatedwith errors
in the incident water velocity predicted by the flightmodel.
Using velocities from theEMCas a baseline, we found that
90% of the estimates of the dissipation rate based on the
calibrated flight model are within a factor of 1.1 and 1.2 for
measurements derived from microstructure temperature
sensors and shear probes, respectively. The uncalibrated
model would produce a bias of factors of 1.05–1.10 and
1.07–1.20 for temperature and shear microstructure, re-
spectively. The uncertainty in dissipation rate estimates
can be attributed to the local variability in the flow, which
is not accounted for in the flight model, as well as possible
noise from the velocity measurement itself. When using
water velocities measured with the DVL, for which the
estimates are more prone to instrument noise, the factors
are slightly larger, namely, 1.2 and 1.4, respectively.
To better represent the hydrodynamics, we have ex-
tended the steady-state glider flight model ofMerckelbach
et al. (2010) to a dynamic model by including the inertial
and added mass terms. A comparison of the two models
found that the flight is largely well described by the
steady-state model and that only when conditions change
rapidly, such as during dive–climb transitions, does the
steady-state model fail, whereas the dynamic model pre-
dicts the incident water velocity reasonably well.
Acknowledgments. We are grateful to Rolf Lueck
(Rockland Scientific) for the useful discussion on the
interpretation of the velocities measured with the elec-
tromagnetic currentmeter.We also thankDavid Pheifer
(True North Technologies) for sharing his expertise on
how to correct the attitude data of glider COMET. The
bathymetry data used in this work were provided by
GEBCO (www.gebco.net). This paper is a contribution
to the projects M6 and T2 of the Collaborative Research
FIG. 11. A section of a time series showing the speed through water as measured by the
EMC (blue curve), the steady-state model (orange), and a dynamic glider flight model (red).
The inset is a zoomed-in view of a deep transition from dive to climb.
FEBRUARY 2019 MERCKELBACH ET AL . 295
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC

Centre TRR 181, ‘‘Energy Transfer in Atmosphere and
Ocean’’; and the projectB6of theCollaborativeResearch
Centre SFB 754, ‘‘Climate–Biogeochemistry Interactions
in the Tropical Ocean’’—all funded by the German Re-
search Foundation (Deutsche Forschungsgemeinschaft).
Part of the measurements (dataset I) took place during
the Expedition Clockwork Ocean, which was partially
supported by the Helmholtz-Zentrum Geesthacht as
part of its PACES II program.We thank the captain and
crew of the R/V Elisabeth Mann Borgese for the excel-
lent technical support, and express our appreciation for
the constructive comments and suggestions by two anon-
ymous reviewers. The data used in this manuscript are
available online (https://doi.org/10.5281/zenodo.2270123).
REFERENCES
Anderson, B. D. O., and J. B. Moore, 2005:Optimal Filtering.Dover
Books on Electrical Engineering, Dover Publications, 368 pp.
Dewey, R., and W. Crawford, 1988: Bottom stress estimates from
vertical dissipation rate profiles on the continental shelf.
J. Phys. Oceanogr., 18, 1167–1177, https://doi.org/10.1175/
1520-0485(1988)018,1167:BSEFVD.2.0.CO;2.
Fer, I., A. K. Peterson, and J. E. Ullgren, 2014: Microstructure
measurements from and underwater glider in the turbulent
FaroeBankChannel overflow. J. Atmos. Oceanic Technol., 31,
1128–1150, https://doi.org/10.1175/JTECH-D-13-00221.1.
Garau, B., S. Ruiz,W. G. Zhang, A. Pascual, E. Heslop, J. Kerfoot,
and J. Tintoré, 2011: Thermal lag correction on Slocum CTD
glider data. J. Atmos. Oceanic Technol., 28, 1065–1071, https://
doi.org/10.1175/JTECH-D-10-05030.1.
Gregg, M., 1999: Uncertainties and limitations in measuring « and
xT . J. Atmos. Oceanic Technol., 16, 1483–1490, https://doi.org/10.1175/1520-0426(1999)016,1483:UALIMA.2.0.CO;2.
Griffiths, G., Ed., 2002:Technology andApplications of Autonomous
Underwater Vehicles. Ocean Science and Technology Series,
CRC Press, 368 pp., https://doi.org/10.1201/9780203522301.
Imlay, F. H., 1961: The complete expressions for ‘‘addedmass’’ of a
rigid body moving in an ideal fluid. David Taylor Model Basin
Research and Development Rep. 1528, 31 pp.
Merckelbach,L., 2018a:Aglider flightmodel for Slocumoceangliders.
GitHub, https://github.com/smerckel/gliderflight/tree/1.0.1.
——, 2018b: Initial release of glider flight model. Version 1.0.1,
Zenodo, https://doi.org/10.5281/zenodo.2222694.
——, D. Smeed, and G. Griffiths, 2010: Vertical velocities from
underwater gliders. J. Oceanic Atmos. Technol., 27, 547–563,
https://doi.org/10.1175/2009JTECHO710.1.
Moum, J., M. Gregg, R. Lien, and M. Carr, 1995: Comparison of
turbulence kinetic energy dissipation rate estimates from two
ocean microstructure profilers. J. Atmos. Oceanic Technol.,
12, 346–366, https://doi.org/10.1175/1520-0426(1995)012,0346:
COTKED.2.0.CO;2.
Newman, J. N., 1977: Marine Hydrodynamics. MIT Press, 402 pp.,
https://doi.org/10.7551/mitpress/4443.001.0001.
Palmer,M., G. Stephenson,M. Inall, C. Balfour, A. Düsterhus, andJ.Green, 2015: Turbulence andmixing by internal waves in the
Celtic Sea determined from ocean glider microstructure
measurements. J. Mar. Syst., 144, 57–69, https://doi.org/10.1016/
j.jmarsys.2014.11.005.
Peterson, A. K., and I. Fer, 2014: Dissipation measurements using
temperature microstructure from an underwater glider.Methods
Oceanogr., 10, 44–69, https://doi.org/10.1016/j.mio.2014.05.002.
Rockland Scientific, 2017: MicroPod-EM: Electromagnetic flow
sensor. Rockland Scientific Rep., 2 pp., https://rocklandscientific.
com/wp-content/uploads/2017/05/RSI-Data-Sheet-MicroPodEM-
A4-1_00-web.pdf.
Ruddick, B., A. Anis, and K. Thompson, 2000: Maximum likeli-
hood spectral fitting: The Batchelor spectrum. J. Atmos.
Oceanic Technol., 17, 1541–1555, https://doi.org/10.1175/1520-
0426(2000)017,1541:MLSFTB.2.0.CO;2.
Rudnick, D., 2016: Ocean research enabled by underwater gliders.
Annu. Rev. Mar. Sci., 8, 519–541, https://doi.org/10.1146/
annurev-marine-122414-033913.
Scheifele, B., S. Waterman, L. Merckelbach, and J. Carpenter,
2018: Measuring the dissipation rate of turbulent kinetic en-
ergy in strongly stratified, low-energy environments: A case
study from the Arctic Ocean. J. Geophys. Res. Oceans, 123,
5459–5480. https://doi.org/10.1029/2017JC013731.
Schultze, L. K. P., L. M. Merckelbach, and J. R. Carpenter, 2017:
Turbulence and mixing in a shallow stratified shelf sea from
underwater gliders. J. Geophys. Res. Oceans, 122, 9092–9109,
https://doi.org/10.1002/2017JC012872.
Simon, D., 2006: Optimal State Estimation: Kalman, H‘, and
Nonlinear Approaches. Wiley and Sons, 526 pp.
St. Laurent, L., and S. Merrifield, 2017: Measurements of near-surface
turbulence and mixing from autonomous ocean gliders. Ocean-
ography, 30 (2), 116–125, https://doi.org/10.5670/oceanog.2017.231.Teledyne RD Instruments, 2017: Explorer Doppler velocity log
(DVL): Navigation performance in a compact package. Teledyne
RD Instruments Rep., 2 pp., http://www.teledynemarine.com/
Lists/Downloads/explorer_datasheet_hr.pdf.
Todd, R., D. Rudnick, J. Sherman, W. Owens, and L. George,
2017: Absolute velocity estimates from autonomous under-
water gliders equipped with Doppler current profilers.
J. Atmos. Oceanic Technol., 34, 309–330, https://doi.org/10.1175/
JTECH-D-16-0156.1.
Wolk, F., R. Lueck, and L. St. Laurent, 2009: Turbulence mea-
surements from a glider. Proc. 13th Workshop on Physical
Processes in Natural Waters, Palermo, Italy, University of
Palermo, https://rocklandscientific.com/wp-content/uploads/
2015/01/Wolk_Lueck_StLaurent_final_PPNW.pdf.
296 JOURNAL OF ATMOSPHER IC AND OCEAN IC TECHNOLOGY VOLUME 36
Unauthenticated | Downloaded 04/04/22 11:50 PM UTC