verhalten mikromechanischer sensoren · logien wie beispielsweise die mikromechanik oder mikrooptik...
TRANSCRIPT

4
KAPITEL 2
Verhalten mikromechanischer Sensoren
2.1 Einführende Übersicht
Aus der Mikroelektronik auf Siliziumbasis haben sich in den letzten Jahrzehnten Basistechno-
logien wie beispielsweise die Mikromechanik oder Mikrooptik entwickelt, die vom weit ent-
wickelten Technologiestandard der Mikroelektronik profitierten. Zum derzeitigen Zeitpunkt ist
die Mikromechanik neben der Mikroelektronik die am weitesten entwickelte Basistechnologie
[6]. Eine Kombination dieser beiden Technologien, d.h. eine monolithische Integration, ermög-
licht die Realisierung komplexer Mikrosysteme, die über eine unterschiedliche Anzahl an
Sensoren und einer entsprechenden Signalverarbeitung verfügen. Je nach Notwendigkeit be-
steht zudem die Möglichkeit das System zusätzlich mit Aktoren auszustatten.
In der Mikromechanik haben sich im Laufe der Entwicklung zwei unterschiedliche Herstel-
lungsverfahren herauskristallisiert. Werden die mikromechanischen Bauteile planar auf der
Oberfläche des Trägermaterials hergestellt, so spricht man von der sog. Oberflächenmikro-
mechanik. Diese Technik besitzt im Gegensatz zur sog. Substratmikromechanik, bei der das
Trägermaterial über die gesamte vertikale Ausdehnung hin strukturiert werden muß, gewisse
Vorteile. Einer dieser Vorteile ist die Realisierung kleinster mikromechanischer Strukturen auf-
grund geringer geometrischer Fertigungstoleranzen. Weiterhin ergeben sich kaum Verspan-
nungen bei notwendigen Montage- und Verbindungstechniken [7], da die lateralen Abmes-
sungen der mikromechanischen Bauelemente im Vergleich zur Dicke des Trägermaterials ver-
schwindend gering sind. Mit diesen zwei verschiedenen Herstellungsverfahren sind die unter-
schiedlichsten mikroskopischen Sensoren für die Messung mechanischer Größen wie beispiels-
weise Beschleunigung, Drehrate, Druck, Kraft, Masse uvm. realisierbar.
Diese Sensoren formen die nichtelektrischen, mechanischen Meßgrößen in elektrisch aus-
wertbare Größen um. Die Umformung durch den Sensor ist jedoch im allgemeinen mit diversen
Nichtidealitäten behaftet. So kann beispielsweise der ausgenutzte physikalische Meßeffekt ein
nichtlineares Verhalten aufweisen. Desweiteren beeinträchtigen häufig äußere Stör- oder
Einflußgrößen den physikalischen Meßeffekt derart, daß das Ergebnis der aufzunehmenden
Meßgröße stark verfälscht wird. Speziell bei der Messung mechanischer Meßgrößen spielt die
Temperatur T als Störgröße die wohl wichtigste Rolle, da sie die Materialeigenschaften und
somit sowohl das Verhalten der elektrischen als auch mechanischen Strukturen verändert.

2.2 Allgemeine Verhaltensbeschreibung von Sensoren 5
Für die Verifizierung der später in dieser Dissertation erarbeiteten Verfahren zur Reduzierung
nichtidealer Sensoreigenschaften soll aus der fast unüberschaubaren Vielfalt an mikro-
mechanischen Sensoren nur die Gruppe der Drucksensoren betrachtet werden, da sie sowohl
nichtlinear als auch auf verschiedene Störgrößen wie beispielsweise Temperatur und Feuchte
empfindlich reagieren und sich aufgrund ihres weiten Entwicklungsstandes hervorragend für
eine monolithische Integration eignen. Zudem prognostiziert man diesen Sensoren - bis weit
über das Jahr 2000 hinaus - den weltweit größten Umsatz auf dem Sensormarkt [4,5].
2.2 Allgemeine Verhaltensbeschreibung von Sensoren
Zur allg. Beschreibung des Übertragungs- und Fehlerverhaltens von Sensoren existieren eine
Reihe von empfohlenen Normen und Richtlinien [8,9], die zur einer Vereinheitlichung der
Sensorkennwerte beitragen sollen. Diese Empfehlungen weisen jedoch eine Reihe von Unzu-
länglichkeiten auf [10], da z. B. die Meßdauer und der Einfluß von mehr als einer Störgröße
unberücksichtigt bleiben. Aus diesem Grund wurde in einer Studie zur Meßwerterfassung von
Lenk [11] ein sogenanntes metrologisches Modell mit exakt definierten Modellparametern ein-
geführt, aus denen die Sensorkennwerte ableitbar sind. Dieses vom Ansatz her heuristische
Modell ist in Bild 2.1 dargestellt. Im allgemeinem Applikationsfall wirken auf den Sensor neben
einer Meßgröße µ auch diverse Störgrößen λ1...λm und beeinflussen die resultierende Aus-
gangsgröße ya [12].
L{µ*}
L{λ *}
L{λ *}
1
m
y = y (µ*,λ *,...,λ *) + y1 mµ d zµ
y = y (λ *) + yλ1 1d zλ1
y = y (λ *) + yλm md zλm
µ∗
λ ∗1
λ ∗m
Σ+
+
+
esy
+ya
Meß-größe µ
Stör-größe λ
Stör-größe λ
1
m
Dynamische Teilsysteme
Quasistatische Teilsysteme
systematisch: zufällig:
Bild 2.1 metrologisches Modell eines Sensors

6 2 Mikromechanische Sensoren
Zeitliche Meß- und Störgrößenveränderungen der natürlichen Umgebung sowie das
konstruktiv-technologische Ansprechverhalten des Sensors werden durch ein dynamisches Teil-
system L{ · } beschrieben. Im allgemeinen kann dieser Sachverhalt jeweils näherungsweise durch
ein lineares dynamisches System mit Tiefpaßcharakter beschrieben werden. Die Modellstruktur
besitzt einen Meßgrößenkanal, dessen quasistatisches Übertragungsverhalten sowohl von der
dynamisch bewerteten Meßgröße µ* als auch von den dynamisch bewerteten Störgrößen λ1*...
λm* beeinflußt wird. Im allgemeinen muß davon ausgegangen werden, daß die Störgrößen den
physikalischen Meßeffekt beeinflussen. In einem solchen Fall kann das Übertragungsverhalten
des Meßgrößenkanals nur noch durch eine mehrdimensionale Funktion yd(µ*,λ1*,..,λm*) be-
schrieben werden. Können jedoch Meß- und Störgrößen jeweils durch eine eindimensionale
Funktion f beschrieben werden yd(µ*,λ1*,..,λm*)=f(µ*)·f(λ1*)·...·f(λm*), so spricht man davon,
das Meß- und Störgrößen voneinander separierbar sind. Ebenfalls existiert für jede Störgröße
ein Übertragungskanal, dessen quasistatisches Verhalten nur von der jeweiligen Störgröße
selbst beeinflußt wird. Solche Anteile werden häufig auch als störgrößenabhängige Offsets
bezeichnet, da dieser Anteil bei fehlender Meßgröße nicht verschwindet. Die quasistatischen
Teilsysteme, bzw. die funktionalen Zusammenhänge der einzelnen Übertragungskanäle setzen
sich sowohl aus deterministischen als auch aus zufälligen, meß- und störgrößeninduzierten
Anteilen zusammen. Alle anderen zufälligen Anteile, deren physikalische Ursachen unbekannt
sind und bei fehlender oder konstanter Meß- und Störgröße auftreten, werden als Eigen-
störungen yes im Modell berücksichtigt.
Die deterministischen und somit nicht zufälligen Fehleranteile können über eine ent-
sprechend geeignete Elektronik korrigiert werden. Zufällige Fehler sind bei ausgereiften Sensor-
konstruktionen im Vergleich zu den deterministischen, störgrößeninduzierten Fehlern deutlich
kleiner, begrenzen jedoch die maximal erzielbare Genauigkeit einer elektronischen Kompen-
sation. Für extrem hohe Genauigkeitsklassen können diese zufälligen Fehleranteile allerdings
durch Mittelwertbildung über einen gewissen Zeitraum bei konstant anliegender Störgröße
verringert werden, was sich allerdings in einem erheblich erhöhten Kostenaufwand bei der
Kalibration niederschlägt und sich somit für eine Massenproduktion als ungeeignet erweist.
Die nächsten zwei Unterabschnitte beschäftigen sich nun mit den unterschiedlichsten Arten
von Drucksensoren, die zur Zeit mit Hilfe der Mikromechanik realisierbar sind. Klassifiziert
werden die Drucksensoren dabei nach den zwei zuvor beschriebenen Herstellungsverfahren
sowie dem Meßwertprinzip. Bei den Meßwertprinzipien sind passive und aktive Verfahren zu
unterscheiden. Passive Drucksensoren wandeln Membrandurchbiegungen in Widerstands- oder
Kapazitätsänderungen um, während aktive Drucksensoren die Meßgröße direkt vor Ort ver-
stärken und beispielsweise in einen Strom wandeln.

2.3 Passive Drucksensoren 7
2.3 Passive Drucksensoren
2.3.1 Piezoresistive Drucksensoren
Das Kernstück eines piezoresistiven Drucksensors besteht aus einer dünnen monokristallinen
Siliziummembran, in deren Oberfläche gemäß Bild 2.2 a) durch Ionenimplantation vier Wider-
stände aus piezoresistiven Material integriert sind. Die piezoresistiven Widerstände werden von
p-leitenden Implantationen, die Isolierung zum Substrat durch den in Sperrrichtung gepolten
pn-Übergang und die Membran aus dem n-leitenden Grundmaterial gebildet [13]. Wie aus dem
Querschnitt in Bild 2.2 b) zu erkennen, sind zur Oberseite hin die piezoresistiven Widerstände
und die Aluminiumzuleitungen abwechselnd mit diversen Isolator- und Passivierungsschichten
aus Siliziumoxid und -nitrid abgedeckt. Dieses mehrschichtige Passivierungskonzept führt zu
stabileren Oberflächeneigenschaften, die zur Verminderung elektrischer Instabilitäten und somit
wesentlich zur Erhöhung der erreichbaren Genauigkeit des Sensors beitragen [12].
U (p,T)
R R
BR
(100)-Wafer
R
Si-Substrat
UDD
Aluminium- leiterbahnen
implantierte Piezowiderstände
Druckplatte(Membran)
implantierte Piezowiderstände
Aluminium-leiterbahnen
PECVD-Si N 3 4
PECVD-SiO 2
therm. SiO 2
LPCVD-Si N 3 4
a) b)
c)
GND
1 2
R3R4
4
R 1
R 3
R 2
(110
)-R
ich
tun
g
Bild 2.2 a) piezoresistiver Drucksensor in Substratmikromechanik
Bild 2.2 b) Querschnitt eines Drucksensors
Bild 2.2 c) zur Vollbrücke verschalteter Drucksensor
Die piezoresistiven Widerstände R1-R4 sind derart auf der quadratischen Membran plaziert,
daß sich zwei ihrer Widerstandswerte bei einer Druckbeaufschlagung vergrößern und die
anderen beiden verkleinern. Die Widerstände werden bevorzugt am Rand der Membran
plaziert, wo die Materialdehnung am größten ist, da es nicht auf die Auslenkung der Membran,
sondern auf die kräfteverstärkende Wirkung ankommt.

8 2 Mikromechanische Sensoren
Werden bei der Herstellung eines Drucksensors Wafer mit einer <100>-Kristallstruktur ver-
wendet, und sind zudem die piezoresistiven Widerstände parallel zur <110>-Richtung orientiert,
so kann die relative Änderung der Widerstände ∆R/R vereinfachend gemäß folgender Formel:
∆RR
pL L T T= ⋅ + ⋅ ∝π σ π σ σ; (2.1)
angegeben werden [7,14], wobei πL den longitudinalen und πT den transversalen piezo-
resistiven Koeffizienten sowie σL und σT die Materialspannungen in longitudinaler und trans-
versaler Richtung angeben. Werden die Widerstände gemäß Bild 2.2 c) zu einer Wheat-
stone´schen Meßbrücke verschaltet, so geht nur das Verhältnis der Widerstände in die
Ausgangsspannung UBR(p,T) der Meßbrücke ein, nicht aber ihr Absolutwert. Die zuvor ange-
gebene Ausrichtung der Widerstände in Bezug zur vorliegenden Kristallorientierung des Wafers
eignet sich besonders gut für die Meßbrücke, da die piezoresistiven Koeffizienten in longitudi-
naler und transversaler Richtung unterschiedliche Vorzeichen besitzen und vom Betrag her etwa
identisch sind (πL≈-πT) [7].
Die Ausgangskennlinie eines piezoresistiven Drucksensors ist jedoch nicht nur vom Druck
alleine, sondern wie fast alle anderen Sensoren auch von anderen physikalischen Einflüssen ab-
hängig. Die Hauptstörgröße ist die Temperatur T. Der hauptsächlich für die Temperatur-
abhängigkeit verantwortliche Effekt ist zweifellos die Temperaturabhängigkeit der piezo-
resistiven Koeffizienten. Untergeordnete Effekte wie beispielsweise die diffusionsbedingte geo-
metrische Abweichung der Brückenwiderstände voneinander, die Ausdehnung des Mediums in
der Druckkammer, temperaturabhängige Leckströme der Widerstände, Materialverspannungen
zwischen der Siliziummembran und den Passivierungsschichten führen zu weiteren Temperatur-
abhängigkeiten des piezoresistiven Drucksensors [7]. Aus diesen Gründen wird die Ausgangs-
spannung UBR(p,T) eines piezoresistiven Drucksensors, im allgemeinen durch [14]:
( ) ( ) ( ) ( )U p T
US T Fkt p O TBR
DD
,= ⋅ + (2.2)
beschrieben. Die funktionalen Zusammenhänge der temperaturabhängigen Empfindlichkeit S(T)
und des temperaturabhängigen Offsets O(T) werden üblicherweise durch die nachfolgenden
Polynomfunktionen:
( ) ( ) ( )S T S TKS T T
U
U p T
pii
i
n
DD
BR= ⋅ + ⋅ −
= ⋅
=∑0 0
1
11 ∂
∂,
(2.3)
und: ( ) ( ) ( )O T O TKO T T
U p T
Ujj
j
m
BR
DD
= ⋅ + ⋅ −
==
∑0 0
1
01,
(2.4)
beschrieben.

2.3 Passive Drucksensoren 9
Die temperaturabhängige Empfindlichkeit S(T) wird durch eine Grundempfindlichkeit S0 und
den Temperaturkoeffizienten TKSi bei einer Bezugtemperatur T=T0 beschrieben. Ebenso kann
der funktionale Zusammenhang des temperaturabhängigen Offsets O(T) durch einen Grund-
offset O0 und die Temperaturkoeffizienten TKOj beschrieben werden. Aufgrund der Tatsache,
das der Grundoffset O0 des Sensors unter Umständen den Wert Null annehmen kann, wird
jedoch die Darstellung:
( ) ( ) ( )O T O O T T
U p T
Ujj
j
m
BR
DD
= + ⋅ − ==
∑0 0
1
0 ,(2.5)
bevorzugt verwendet.
Bei kleinen Durchbiegungen der polykristallinen Siliziummembran ist die Ausgangsspannung
UBR(p,T) in Abhängigkeit vom Druck linear (Fkt(p)=p), bei großen Durchbiegungen erfährt die
Membran eine zunehmende Versteifung, die Ausgangsspannung wird zunehmend nichtlinear
(Fkt(p)=p·(1+FLin·p)). Aus diesem Grund ist eine größere Nichtlinearität bei Niedrigdruck-
sensoren verständlich, da im Gegensatz zu den Hochdrucksensoren die notwendigen
Membranauslenkungen wesentlich größer sind. Zusätzlich ist der piezoresistive Effekt nicht-
linear, und es reicht bei hohen Materialspannungen (Verhältnis zwischen Membrandicke und
Membrandurchbiegung) ein einfacher linearer Zusammenhang der relativen Widerstands-
änderung nicht mehr aus.
Da der Drucksensor, wie in Bild 2.3 gezeigt, auf ein Trägersubstrat (meistens Pyrex - ein in
seinem Ausdehnungsverhalten an Silizium angepaßtes Glas) anodisch gebondet und zusätzlich
in einem Gehäuse befestigt werden muß, können durch die unterschiedlichen thermischen
Ausdehnungskoeffizienten der verschieden Materialien sowie unterschiedlicher Montage-
techniken weitere Temperaturabhängigkeiten entstehen. Eine Messung der temperatur-
abhängigen Kenndaten ist daher erst am fertig gehäusten IC, bzw. Drucksensor sinnvoll [13].
p1
p2
Gehäuse
Träger
Si-SubstratMembran
Bonddraht
Bild 2.3 aufgebauter Relativdrucksensor der Reihe PSXi (Quelle: TU Berlin)

10 2 Mikromechanische Sensoren
Bild 2.4 zeigt eine typische Kennlinie eines piezoresistiven Drucksensors in Abhängigkeit vom
Druck p mit der Temperatur T als Parameter. Hängt die Ausgangsspannung UBR(p,T) der Meß-
brücke linear vom Druck ab, so ist die Empfindlichkeit über dem gesamten Druckbereich
konstant. Ist jedoch eine Nichtlinearität in der Druckkennlinie enthalten, so ist die Empfindlich-
keit ebenfalls eine vom Druck abhängige Größe. Typische Werte für die Nichtlinearität von
piezoresistiven Drucksensoren liegen bei ±0,2% [13]. Deutlich ist eine Veränderung des Offsets
bei p=p0 und der Empfindlichkeit bei p≠p0 in Abhängigkeit von der Temperatur zu erkennen.
Ein nichtlinearer Zusammenhang zwischen der Temperatur und der Empfindlichkeit sowie dem
Offset kann schon hier erkannt werden, da die Änderung der Ausgangsspannung im unteren
Temperaturbereich (-40°C .. 27°C) größer ist als im oberen Temperaturbereich (27°C .. 120°C).
0,0 0,5 1,0 1,5 2,00
20
40
60
80
100
UBR (p,T)
GND
UDD
R4 R3
R2R1
T= -40°C T= 27°C T=120°C
UBR
(p
,T)
/ mV
Druck p / bar
Bild 2.4 Typische Kennlinie eines piezoresistiven Drucksensors[Sensordaten: UDD=5V, pN=2bar, TO=27°C, SO=5mV/V⋅bar, TKS1=-2mV/K, TKS2=10mV/K², O0=5mV/V,
O1=-25mV/V⋅K, O2=100nV/V⋅K²]
Wird die Temperaturabhängigkeit beispielsweise beim halben Nenndruck pN /2 betrachtet, so ist
die Abnahme der Ausgangsspannung UBR(pN /2,T) mit zunehmender Temperatur in Bild 2.5
deutlich zu erkennen. Ebenfalls sind in diesem Bild die einzelnen Anteile des temperatur-
abhängigen Offsets O(T) und der Empfindlichkeit S(T) gezeigt, die zur resultierenden Ausgangs-
spannung beitragen. Bei vielen piezoresistiven Drucksensoren nimmt bei tieferen Temperaturen
die Nichtlinearität des Temperaturganges sowohl für den Offset als auch für die Empfindlichkeit
deutlich zu, so daß für eine hohe Genauigkeit über einen großen Temperaturbereich
(-40°C .. 120°C) eine Korrektur mit linearem Zusammenhang nicht mehr ausreichend ist.

2.3 Passive Drucksensoren 11
-40 -20 0 20 40 60 80 100 1203
4
5
6
7
O(T
) / m
V/V
Temperatur T / °C
3
4
5
6
7
S(T)
/ m
V/V
·ba
r35404550556065
UBR (pN/2,T)=UDD·[S(T)·Fkt(pN/2)+O(T)]
UBR
(p N
/2,T
) / m
V
Bild 2.5 Temperaturabhängigkeit von UBR(p,T) bei pN/2=1bar[Sensordaten: UDD=5V, pN=2bar, TO=27°C, SO=5mV/V⋅bar, αS=-2mV/K, βS=10mV/K², O0=5mV/V,
O1=-25mV/V⋅K, O2=100nV/V⋅K²]
Änderungen der Temperatur und des Drucks verursachen zumeist deterministische Ände-
rungen der Ausgangsspannung UBR(p,T). Diese systematischen Fehleranteile des Temperatur-
einflusses sind im allgemeinen über elektronische Maßnahmen korrigierbar. Intensive
Messungen an piezoresistiven Drucksensoren haben jedoch ergeben, daß neben den
systematischen auch zufällige Änderungen der Ausgangsspannung auftreten . Diese zufälligen1
und somit nur bedingt korrigierbaren Fehleranteile können sowohl durch Temperatur- als auch
durch Druckänderungen hervorgerufen werden und begrenzen in Kombination mit den nach
der Korrektur verbliebenen Fehleranteilen die maximal erzielbare Genauigkeit der elektronischen
Kompensation. Die geringe Größe dieser zufällig auftretenden Änderungen rechtfertigt jedoch
im Vergleich zu den deterministisch auftretenden Änderungen keine zeit- und kosten-
aufwendige Kompensation.
Druck- und temperaturabhängige Hysteresen sowie durch elektrische Instabilitäten hervor-
gerufene Langzeitdrifteffekte führen zu weiteren Ungenauigkeiten, die derzeitig nicht korrigier-
bar sind. Ermüdungserscheinungen, wie sie von Metalldruckdosen her bekannt sind, können
nicht auftreten, da Silizium aufgrund seiner hervorragenden mechanischen Materialeigen-
schaften bis nahe zur Bruchgrenze elastisch verformbar ist, jedoch können Grenzflächen-
zustände und bewegliche Oxidladungen im Laufe der Zeit zu Veränderungen des Grundoffsets
O0 führen.
1 Drifteffekte beweglicher Ionen auf den vorhandenen Isolator- bzw. Passivierungsoberflächen sind diehauptsächliche Ursache für zufällige, nicht deterministische Änderungen eines piezoresistiven Drucksensors. Für einegenauere Ausführung dieser zufälligen Änderungen sei auf den Artikel von Gerlach verwiesen [12].

12 2 Mikromechanische Sensoren
2.2.2 Kapazitive Drucksensoren in Substrat- und Oberflächenmikro-mechanik
Wird ähnlich wie beim piezoresistiven Sensor das Silizium über seine gesamte vertikale Aus-
richtung gemäß Bild 2.6 strukturiert, so kann ein kapazitiver Drucksensor in Substratmikro-
mechanik hergestellt werden [15,16]. Auf die Oberseite des bearbeiteten Wafers werden im
Sensorbereich Elektroden integriert. Als Gegenelektroden dienen auf Glas, bzw. Pyrex aufge-
dampfte Aluminiumelektroden. Da keine direkte Kontaktierung der Elektroden vom Glas-
substrat zum Siliziumwafer möglich ist, dienen diese als Verbindung zweier in Reihe ge-
schalteter Kapazitäten, dessen zu kontaktierende Elektroden sich nun beide auf dem Silizium-
wafer befinden. Die mit den Verbindungselektroden versehene Glasplatte wird anodisch unter
Vakuum auf die Oberseite des bereits strukturierten Siliziumwafer gebondet. Die Druckbeauf-
schlagung erfolgt von der Unterseite über eine Öffnung im sog. Trägersubstrat, das wiederum
anodisch mit dem Siliziumwafer verbunden worden ist.
p
Referenzkapazitäten
Sensor-kapazitäten
Pyrex
Pyrex
strukturierter Siliziumwafer
integrierteElektronik
Referenzkapazität
Sensorkapazität
C C ´C C ´R S S R
Bild 2.6 Ausschnitt eines kapazitiven Absolutdrucksensors in Substratmikromechanik
Durch diese eben beschriebene Sandwich-Struktur sind sowohl variable Sensorkapazitäten
CS und CS´, die über eine Druckbeaufschlagung p verändert werden können, als auch feste
Kapazitäten CR und CR´ entstanden. Die festen Kapazitäten werden als Referenzkapazitäten
benutzt, so daß der angelegte Druck über das Verhältnis zwischen Sensor- und Referenz-
kapazität ausgewertet werden kann, wodurch der Absolutwert der hergestellten Kapazitäten
nur von untergeordneter Bedeutung ist. Sensor- und Referenzkapazität besitzen in etwa den
gleichen Temperaturgang, so daß die Temperaturabhängigkeit allein über eine Verhältnis-
bildung zwischen diesen beiden Kapazitäten erheblich reduziert werden kann. Diese Sensoren
besitzen jedoch im Gegensatz zu den piezoresistiven Drucksensoren eine sehr starke Nicht-

2.3 Passive Drucksensoren 13
linearität. Dies liegt prinzipiell in der Tatsache begründet, daß sich die Kapazität mit abnehmen-
dem Elektrodenabstand umgekehrt proportional vergrößert. Zudem kann nur bei geringen
Durchbiegungen, d.h. einem kleinen Verhältnis zwischen Membrandicke und Membranauslen-
kung davon ausgegangen werden, daß sich der Abstand zwischen den Elektroden proportional
zum Druck verhält. Weitere Nichtlinearitäten in der Kapazitätsänderung werden bei großen
Durchbiegungen durch die zunehmende Versteifung der Membran und letztendlich durch die
Membranauflage auf der Gegenelektrode verursacht.
Im Gegensatz zu den oben beschriebenen Drucksensoren in Substratmikromechanik können
mit Hilfe der sog. Opferschichttechnik [7,17] auf der Oberseite des Siliziummaterials extrem
dünne und mechanisch aktive Siliziummembranen mit hervorragenden mechanischen und
chemischen Eigenschaften hergestellt werden. Bild 2.7 zeigt den prinzipiellen Aufbau eines mit
dieser Technik hergestellten Drucksensors im Querschnitt. Die kreisrunde Membran aus Poly-
silizium ist in einem Abstand von weniger als einem Mikrometer über der Oberfläche elastisch
aufgehängt. Unterhalb der Membran befindet sich eine Gegenelektrode, die mittels einer n+-
Ionenimplantation erzeugt wird. Die über den Druck deformierbare Polysilizium-Membran und
die niederohmige n+-Implantation bilden die Elektroden des druckempfindlichen Platten-
kondensators.
n+p+ p+
pSchutzoxid
Zwischenoxid
MetallisierungPolysilizium(Membran)
p-Substrat
Hohlraum Siliziumnitridd(p,r)
r
z
z=0
Polarkoordinaten-system
Bild 2.7 prinzipieller Aufbau eines kapazitiven Drucksensors in Oberflächenmikromechanik
Der spätere Hohlraum wird über ein strukturierbares Opferoxid, auf dem die Abscheidung
des Membranmaterials erfolgt, freigehalten. Das Opfermaterial wird über feine Ätzkanäle, die
sich an der Oberfläche des Trägermaterials befinden, mit Hilfe eines selektiven, isotropen Ätz-
prozesses entfernt. Nach der vollständigen Entfernung des Opferoxidmaterials unter der
Membran werden die Ätzkanäle unter Vakuum mit Siliziumnitrid Si3N4 verschlossen, so daß ein
Absolutdrucksensor entsteht. Je nachdem, ob das über der Membran befindliche Schutzoxid

14 2 Mikromechanische Sensoren
entfernt wird, können sowohl Druck- als auch baugleiche Referenzelemente gemäß Bild 2.8
hergestellt werden. Über eine Differenz- oder Quotientenbildung zwischen Referenz- und
Sensorelement können auftretende Temperaturempfindlichkeiten und Nichtlinearitäten erheb-
lich verringert werden. Je nach Nenndruck pN und Sensorempfindlichkeit S variiert der Durch-
messer 2·ra und die Anzahl ND der parallel geschalteten Sensorelemente.
n+p+ p+
pSchutzoxid
Zwischenoxid
Metallisierung Polysilizium
p-Substrat
HohlraumSiliziumnitrid
Bild 2.8 prinzipieller Aufbau des kapazitiven Referenzelementes
Da sich der Abstand d(p,r) zwischen der Polysilizium-Membran und der n+-Gegenelektrode
nicht über dem Radius r konstant verhält, müssen bei der Berechnung der druckabhängigen
Kapazität C(p) die einzelnen Beiträge über den gesamten Membranradius von 0 bis ra integriert
werden:
( )C p Nr
d p rdrD
ra
( ),
= ⋅⋅ ⋅ ⋅∫ 2 0
0
ε π. (2.6)
Der Abstand d(p,r) des Sensorelements, der sowohl vom angelegten Druck p als auch vom
Radius r abhängt, kann über die Durchbiegung einer kreisrunden und am Rand fest ein-
gespannten Membran berechnet werden. Aufgrund der Rotationssymmetrie ist die Durch-
biegung nur vom Radius r und nicht vom Winkel θ abhängig. Somit kann für kleine Durchbie-
gungen z(r), die viel kleiner sind als die Dicke der beweglichen Membran, nach Timoshenko [18]
die folgende Differentialgleichung angesetzt werden:
d z rdr r
d z rdr r
dz rdr
p rD
3
3
2
2 2
1 12
( ) ( ) ( )+ ⋅ − ⋅ = ⋅⋅
, (2.7)
wobei: ( )DE h= ⋅⋅ −
3
212 1 ν(2.8)
die Plattenbiegesteifigkeit angibt, die sich ihrerseits aus dem Elastizitätsmodul E, der Membran-
dicke h und der Querkontraktionszahl ν zusammensetzt.

2.3 Passive Drucksensoren 15
Mit den Randbedingungen:
dzdr
dzdr
r z ra a( ) ; ( ) ; ( )0 0 0 0= = = (2.9)
lautet die Lösung für die Durchbiegung in Abhängigkeit vom Radius r:
( )z rp
Dr ra( ) =
⋅⋅ −
642 2 2
, (2.10)
die verständlicherweise vom angelegten Druck p beeinflußt wird. Da der ausgeätzte Hohlraum
unter der Polysilizium-Membran wieder nahezu unter Vakuum verschlossen wird, berechnet sich
der Abstand d(p,r) zur gegenüberliegenden n+-Elektrode aus der Differenz des Abstandes d0
bei p=p0 (Vakuum) abzüglich der eben zuvor berechneten Durchbiegung z(r):
( )d p r dpD
r ra( , ) = −⋅
⋅ −02 2 2
2. (2.11)
Mit dem Abstand d(p,r) und dem Zusammenhang aus Gleichung (2.6) kann sowohl die
Kapazität C(p) des Referenz- als auch des Sensorelementes berechnet werden:
( )( )( )C p
C Np
p
pD( ) ln= ⋅
⋅⋅
+−
0
2
1
1γγγ
(2.12)
mit: ( ) ( )γ p
z
dp r
D da= =
⋅⋅ ⋅
0
640
4
0
und Cr
da
00
2
0
=⋅ ⋅ε π
(2.13)
Die Referenzkapazität CR ist im Gegensatz zur Sensorkapazität CS nur schwach vom Druck p
abhängig, da das Referenzelement eine größere Plattenbiegesteifigkeit D besitzt, die durch das
auf der Membran befindliche Schutzoxid verursacht wird. Entwickelt man Gleichung (2.12) in
eine Reihe und bricht sie nach dem zweiten Glied ab, so kann für kleine Drücke der nach-
folgende Kapazitätsausdruck angegeben werden:
( )
C p N Cp
N Cp r
D dD Da( ) = ⋅ ⋅ +
= ⋅ ⋅ +
⋅⋅ ⋅
0
2
0
4
0
13
1192
γ(2.14)
Obwohl die obige Gleichung nur für den Bereich kleiner Drücke richtig ist, eignet sich dieser
Ausdruck sehr gut für eine Abschätzung der Empfindlichkeit S des Drucksensors:
( )
S NC
Er
h dDa= ⋅
⋅ −
⋅⋅
⋅0
2 4
30
1
16
ν. (2.15)
Gleichung (2.15) zeigt, daß die Empfindlichkeit S des Sensors stark von den geometrischen
Parametern der Membran abhängig ist, da der Radius ra proportional zur vierten Potenz sowie
die Dicke h der Membran umgekehrt proportional zur dritten Potenz in die Berechnung ein-
gehen. Wenn auch nur umgekehrt proportional, beeinflußt zudem die Höhe d0 der Aufhän-
gung die Empfindlichkeit S.

16 2 Mikromechanische Sensoren
Wie bereits erwähnt, gelten alle zuvor berechneten Zusammenhänge unter der Prämisse,
daß die Durchbiegung z(r) viel kleiner als die Membrandicke h ist. Außerdem kann mit Hilfe der
verwendeten DGL nach Gleichung (2.7) zur Berechnung der Durchbiegung z nicht die Auflage
der Membran auf der Gegenelektrode modelliert werden (linearer Ansatz). Sind aber zufrieden-
stellende Ergebnisse für Durchbiegungen bis zum zweifachen der Membrandicke notwendig,
und sollen zusätzlich dynamische Effekte sowie die Auflage der Membran auf der Gegen-
elektrode berücksichtigt werden, so findet eine nichtlineare, dynamische DGL nach Grasch
Verwendung (nichtlinearer Ansatz). Die dabei verwendete DGL wird im Rahmen der hier vor-
liegenden Arbeit nicht vorgestellt, für interessierte Leser wird aber auf entsprechend geeignete
Literatur verwiesen [19]. Das nachfolgende Bild 2.9 zeigt die Druckabhängigkeit der Referenz-
und Sensorkapazität, die über den nichtlinearen Ansatz numerisch berechnet wurde.
0,0 0,4 0,8 1,2 1,6 2,02
3
4
5
6
7
C0
Auflagepunkt der Membran
p=pA
Sensorkapazität CS
Referenzkapazität CR
Kap
azit
ät /
pF
Druck p / bar
Bild 2.9 Druckabhängigkeit der Sensor- und Referenzkapazität (ND=25, ra=53µm)
Da sich der Abstand d(p,r) zwischen Membran und Gegenelektrode mit zunehmendem Druck
verkleinert, wächst die Sensorkapazität CS bis zu einem sog. Auflagedruck bei p=pA aufgrund
der allgemeinen Kapazitätsformel annähernd reziprok an. Diese Funktionalität wird bei
größeren Drücken durch die zunehmende Versteifung der Membran abgeschwächt. Oberhalb
des Auflagedrucks pA nimmt die Kapazität annähernd linear zu, da die Auflagefläche der
Membran ebenfalls linear zunimmt und sich aufgrund der dünnen Isolationsschicht aus
Siliziumnitrid Si3N4 auf der n+-Gegenelektrode kapazitätsbestimmend verhält.
Die Referenzkapazität CR besitzt im Gegensatz zur Sensorkapazität CS nur eine schwache
Druckabhängigkeit, da die Membran durch das nicht entfernte Schutzoxid eine größere Platten-
biegesteifigkeit D besitzt. Die Referenzkapazität verläuft somit über dem Druck p annähernd
2.3 Passive Drucksensoren 17
linear, da das Referenzelement aufgrund der erhöhten Membrandicke in dem betrachteten
Druckbereich weit vom Auflagedruck pA entfernt ist. Obwohl der Dynamikbereich stark einge-
schränkt wird, werden die Sensorelemente zumeist bis maximal zum halben Auflagedruck
p=pA/2 betrieben, da oberhalb dieses Bereiches der Verlauf der Kennlinie technologisch nicht
mehr reproduzierbar ist. Der Kapazitätshub (CS-CR) zwischen Sensor- und Referenzkapazität
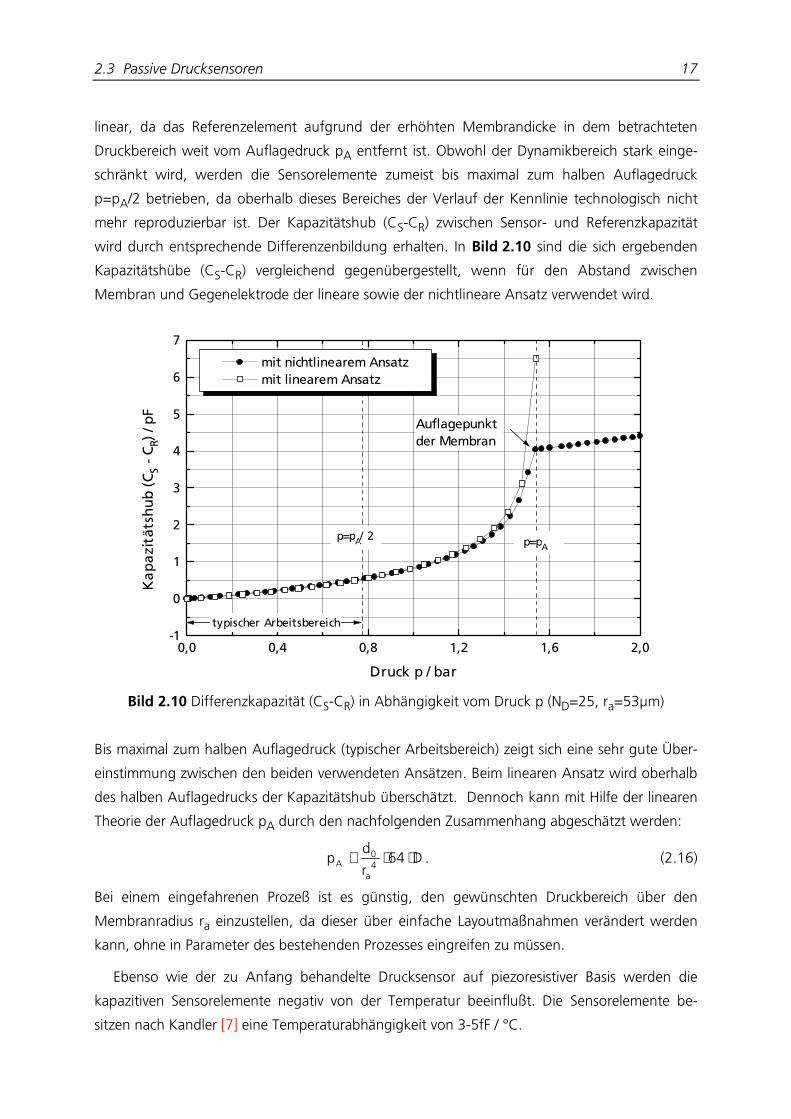
wird durch entsprechende Differenzenbildung erhalten. In Bild 2.10 sind die sich ergebenden
Kapazitätshübe (CS-CR) vergleichend gegenübergestellt, wenn für den Abstand zwischen
Membran und Gegenelektrode der lineare sowie der nichtlineare Ansatz verwendet wird.
0,0 0,4 0,8 1,2 1,6 2,0-1
0
1
2
3
4
5
6
7
Auflagepunktder Membran
p=pA
typischer Arbeitsbereich
p=pA/ 2
mit nichtlinearem Ansatz mit linearem Ansatz
Ka
pa
zitä
tsh
ub
(C
S - C
R) /
pF
Druck p / bar
Bild 2.10 Differenzkapazität (CS-CR) in Abhängigkeit vom Druck p (ND=25, ra=53µm)
Bis maximal zum halben Auflagedruck (typischer Arbeitsbereich) zeigt sich eine sehr gute Über-
einstimmung zwischen den beiden verwendeten Ansätzen. Beim linearen Ansatz wird oberhalb
des halben Auflagedrucks der Kapazitätshub überschätzt. Dennoch kann mit Hilfe der linearen
Theorie der Auflagedruck pA durch den nachfolgenden Zusammenhang abgeschätzt werden:
pd
rDA
a
≅ ⋅ ⋅04
64 . (2.16)
Bei einem eingefahrenen Prozeß ist es günstig, den gewünschten Druckbereich über den
Membranradius ra einzustellen, da dieser über einfache Layoutmaßnahmen verändert werden
kann, ohne in Parameter des bestehenden Prozesses eingreifen zu müssen.
Ebenso wie der zu Anfang behandelte Drucksensor auf piezoresistiver Basis werden die
kapazitiven Sensorelemente negativ von der Temperatur beeinflußt. Die Sensorelemente be-
sitzen nach Kandler [7] eine Temperaturabhängigkeit von 3-5fF / °C.

18 2 Mikromechanische Sensoren
Da die Referenzelemente aufgrund ihrer identischen Bauweise ungefähr den gleichen
Temperaturgang besitzen, kann durch eine Differenz- oder Quotientenbildung die Temperatur-
abhängigkeit signifikant unterdrückt werden. Je nach der Größe des Membrandurchmessers
kann die Temperaturabhängigkeit der Differenz oder des Quotienten zwischen Sensor- und
Referenzelement positiv oder negativ ausfallen. Bei Membrandurchmessern kleiner gleich 70µm
zeigt die Sensorkapazität eine größere Temperaturabhängigkeit als das Referenzelement, womit
sich ein positiver TK der Differenzkapazität (CS-CR) ergibt. Umgekehrtes Verhalten ergibt sich für
Membrandurchmesser von 100µm und mehr. Im Übergangsbereich zwischen 70 und 100µm
kann im Idealfall eine vollständige Kompensation des Temperaturgangs erzielt werden.
Bild 2.11 zeigt die sich ergebende Differenzkapazität bei einem Dosenradius ra von 53µm und
einer Dosenanzahl ND von 25, die über drei verschiedene Temperaturen parametrisiert ist.
0,0 0,2 0,4 0,6 0,80
100
200
300
400
500 T= -40°C T= 27°C T=120°C
(CS-
CR)
/ f
F
Druck p / bar
Bild 2.11 Typische Druckabhängigkeit der Differenzkapazität (CS-CR) (ND=25, ra=53µm)
Ein Vergleich mit der typischen Kennlinie des piezoresistiven Drucksensors aus Bild 2.4 zeigt,
daß die kapazitiven Drucksensoren aufgrund der Differenzbildung zwischen Sensor- und
Referenzelement eine wesentlich geringere Temperaturabhängigkeit besitzen. Die Ursachen der
Temperaturabhängigkeit liegen hauptsächlich in unterschiedlich großen Ausdehnungs-
koeffizienten zwischen den verwendeten Materialien sowie in Änderungen der elastischen und
dielektrischen Konstanten begründet [7]. Wie Bild 2.11 zeigt, muß bei Nulldruck p0 die
Differenz zwischen Sensor- und Referenzelement nicht verschwinden. Dieser Kapazitätsoffset ist
wie auch der Kapazitätshub von der Temperatur T abhängig. Ebenso wie beim piezoresistiven
Drucksensor können diese Temperaturabhängigkeiten der Differenzkapazität über Polynom-
ansätze beschrieben werden.

2.4 Aktive Drucksensoren 19
2.4 Aktive Drucksensoren
Durch eine einfache Modifikation der unteren n+-Elektrode kann aus dem passiven Sensor-
element, welches die Durchbiegung der Membran in eine Kapazitätsänderung umformt, ein
aktives Sensorelement entstehen. Hierzu wird am einfachsten die kreisrunde n+-Elektrode in
zwei gleich große Halbkreise aufgetrennt. Durch diese Strukturierung ist ein Kanal entstanden,
dessen Leitfähigkeit über die darüberliegende Membran gesteuert werden kann. Da der
Steuermechanismus auf dem Feldeffekt beruht, bewirkt eine druckabhängige Bewegung der
Membran, an die eine konstante Spannung angelegt wird, eine Modulation der im Kanal be-
findlichen Ladungsträger [22-24]. Signalträger ist demnach ein Strom, der im Vergleich zur
druckabhängigen Kapazitätsänderung mit wenig Aufwand auszuwerten ist. Dieser Abschnitt
beschäftigt sich mit diesem interessanten Bauelement intensiver, da sich von dem druck-
empfindlichen Feldeffekt-Transistor eine hohe Sensorempfindlichkeit mit zusätzlich heraus-
ragenden Frequenzeigenschaften [7] bei gleichzeitig reduzierter Dosenanzahl ND versprochen
wird. Das Meßprinzip des druckempfindlichen Feldeffekt-Transistors, dessen Aufbau aus dem in
Bild 2.12 gezeigten Querschnitt hervorgeht, beruht auf einer Veränderung der flächenbe-
zogenen Gatekapazität C´g(p,r), da sich bei einer Druckbeaufschlagung der Abstand d(p,r)
zwischen der beweglichen Gateelektrode und der Kanaloberfläche verändert.
n+
pSchutzoxid
Zwischenoxid
Metallisierung
Polysilizium
p -Substrat
n+
Vergrößerung derKanalregion
r
z
z=0
Polarkoordinaten-system
-
Siliziumnitrit p -Substrat
C´
C´ (p,r)
Polysilizium-Membran
fest
var
-
n+ n+
Siliziumnitrid
Bild 2.12 Querschnitt durch den druckempfindlichen Feldeffekt-Transistor
Da sich durch das Verschließen der Druckdose Siliziumnitrid Si3N4 auf der Kanaloberfläche ab-
scheidet, berechnet sich die resultierende Änderung der gesamten flächenbezogenen Gate-
kapazität C´g(p,r):
( ) ( )( ) ( )′ =
′ ⋅ ′′ + ′
=⋅ ⋅
⋅ + ⋅C p r
C p r C
C C p r d d p rgfest
fest
o Si N vak
vak Si N Si N
,,
, ,var
var
ε ε εε ε
3 4
3 4 3 4
(2.17)
20 2 Mikromechanische Sensoren
aus der Reihenschaltung eines festen und variablen flächenbezogenen Kapazitätsanteils C´fest
und C´var(p,r). Mit Hilfe des bereits zuvor ermittelten Abstands d(p,r) gemäß Gleichung (2.11)
ergibt sich in Abhängigkeit vom angelegten Druck p und dem Radius r der nachfolgende Aus-
druck für die flächenbezogene Gatekapazität:
( )( )
′ =⋅ ⋅
⋅ + ⋅ −⋅
−
C p rd d
pD
r rg
o Si N vak
vak Si N Si N a
,ε ε ε
ε ε
3 4
3 4 3 4 02 2
2
. (2.18)
Für die Untersuchung des Drucktransistors wird das im Anhang A dieser Arbeit beschriebene
MOS-Level1-Modell [20] verwendet, das dem Modell von Shichman und Hodges [21] in leicht
modifizierter Form entspricht. Anhand der Modellgleichungen kann erkannt werden, daß durch
die Änderung des druckabhängigen Kapazitätsbelages C´g(p,r) gleich mehrere charakteristische
Größen eines MOS-Transistors beeinflußt werden. Als wichtigste Größen sind hier die
Schwellenspannung, Leitfähigkeits- und Substrateffektkonstante zu nennen:
( ) ( ) ( )U p rq NC p r
p r sT MSSS
gS,
,, arg= −
⋅′
+ + ⋅Φ Φ γ (2.19)
( ) ( )B p r C p rg0 0, ,= ⋅ ′µ (2.20)
( ) ( )γε ε
p rq N
C p ro Si SUB
g
,,
=⋅ ⋅ ⋅ ⋅
′2
. (2.21)
Bei der genaueren Betrachtung der Schwellenspannung UT(p,r) zeigt sich, daß die Verschiebung
durch zwei Terme mit unterschiedlichen Vorzeichen verursacht wird. Das Vorzeichen der
Schwellenspannungsverschiebung ist laut Gleichung (2.19) vom Verhältnis der Substrat-
dotierung NSUB zur Oberflächenladungsdichte NSS abhängig. Die Oberflächenladungsdichte ist
technologisch nicht gezielt einstellbar, gilt jedoch als Maß für die Güte eines Prozesses. Sie liegt
üblicherweise in der Größenordnung von 1010cm-2 und kleiner. Da sich jedoch im Gegensatz
zum herkömmlichen Transistor auf der Kanaloberfläche kein spezielles Gateoxid, sondern eine
dünne Schicht Siliziumnitrid befindet, kann über die Größe der Oberflächenladungsdichte NSS
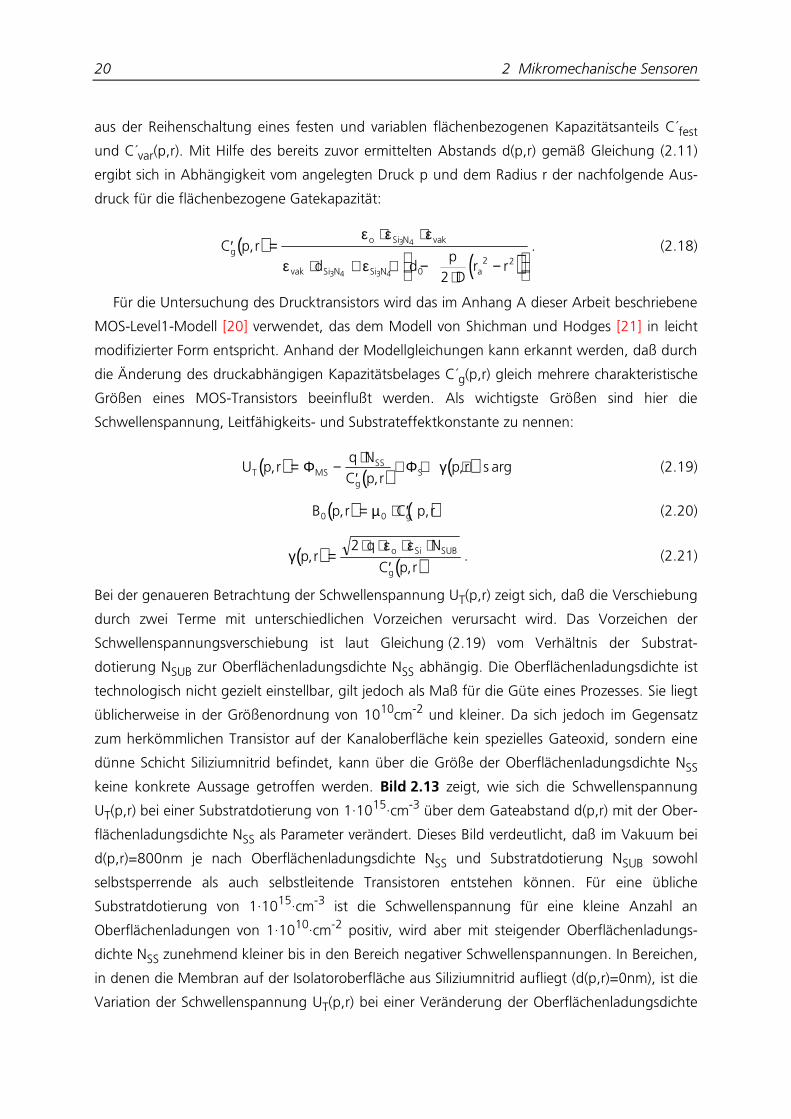
keine konkrete Aussage getroffen werden. Bild 2.13 zeigt, wie sich die Schwellenspannung
UT(p,r) bei einer Substratdotierung von 1·1015·cm-3 über dem Gateabstand d(p,r) mit der Ober-
flächenladungsdichte NSS als Parameter verändert. Dieses Bild verdeutlicht, daß im Vakuum bei
d(p,r)=800nm je nach Oberflächenladungsdichte NSS und Substratdotierung NSUB sowohl
selbstsperrende als auch selbstleitende Transistoren entstehen können. Für eine übliche
Substratdotierung von 1·1015·cm-3 ist die Schwellenspannung für eine kleine Anzahl an
Oberflächenladungen von 1·1010·cm-2 positiv, wird aber mit steigender Oberflächenladungs-
dichte NSS zunehmend kleiner bis in den Bereich negativer Schwellenspannungen. In Bereichen,
in denen die Membran auf der Isolatoroberfläche aus Siliziumnitrid aufliegt (d(p,r)=0nm), ist die
Variation der Schwellenspannung UT(p,r) bei einer Veränderung der Oberflächenladungsdichte

2.4 Aktive Drucksensoren 21
NSS weitaus kleiner. Ähnlich wie beim nichtimplantierten Standardtransistor liegt die Schwellen-
spannung bei leicht negativen Werten.
0 200 400 600 800-140
-120
-100
-80
-60
-40
-20
0
20<-- Druck p
NSS=1·1010cm-2, ... , 1·1012cm-2
log(NSS)
Sch
wel
len
span
nu
ng
UT(
p,r
) /
V
Gateabstand d(p,r) / nm
Bild 2.13 Schwellenspannung UT(p,r) über variablen Gateabstand d(p,r) parametrisiert mit NSS
Das Vorzeichen kann jedoch innerhalb gewisser Grenzen gezielt durch die Substratdotierung
NSUB eingestellt werden. Das nachfolgende Bild 2.14 zeigt die Schwellenspannungsver-
schiebung in Abhängigkeit vom Gateabstand d(p,r) mit NSUB als Parameter bei einer Ober-
flächenladungsdichte NSS von 6·1010cm-2.
0 200 400 600 800-25
0
25
50
75
100<-- Druck p
log(NSUB)
NSUB= 1·1014 cm-3, .. ,1·1016 cm-3
Sch
wel
len
span
nu
ng
UT(
p,r
) /
V
Gateabstand d(p,r) / nm
Bild 2.14 Schwellenspannung UT(p,r) über variablen Gateabstand d(p,r) parametrisiert mit NSUB

22 2 Mikromechanische Sensoren
Aber nicht nur die Verschiebung der Schwellenspannung UT(p,r) ist für eine Änderung des
Stromflusses durch den unter der beweglichen Membran integrierten Feldeffekt-Transistor
verantwortlich, sondern auch die Änderung der Leitfähigkeitskonstanten B0. Für eine möglichst
große Druckempfindlichkeit S=∂IDS/∂p muß sich sowohl der Betrag der Sättigungsspannung
UDSAT als auch die Leitfähigkeitskonstante B0 vergrößern. Damit sich der Betrag der Sättigungs-
spannung UDSAT vergrößert, muß sich die Schwellenspannung UT(p,r) bei einem selbst-
sperrenden MOS-Transistor mit zunehmendem Druck verkleinern, bei einem selbstleitenden
Transistor vergrößern. Da dieses Verhalten mit dem aus Bild 2.14 korrespondiert, und sich die
Leitfähigkeitskonstante B0 ebenfalls mit zunehmendem Druck vergrößert, kompensieren sich
diese beiden auftretenden Effekte nicht, sondern verstärken sich gegenseitig. Mit den zuvor
angegebenen Ausdrücken für die druck- und ortsabhängige Schwellenspannung UT(p,r) sowie
Leitfähigkeitskonstante B0(p,r) kann der druckabhängige Drainstrom durch den mikro-
mechanischen Feldeffekt-Transistor:
( ) ( )I pL
I p r dsDS DS
C
= ⋅ ∫1, (2.22)
berechnet werden. Der Integrationsweg C ergibt sich aus dem Verlauf des Kanals unter der
mikromechanischen Membran. Prinzipiell sind beliebige geometrische Kanalverläufe des
Transistors denkbar. Für die nachfolgende Berechnung und die Anfertigung von Teststrukturen
sind radialsymmetrische Kanalverläufe, wie in Bild 2.15 gezeigt, verwendet worden.
Metal
Polysilizium
p -Diffusion
n -Diffusion
Kontakt
Glassöffnung
+
Ätzkanäle
DRAIN
DRAIN
SOURCESOURCE
1.ter K
anal
(N -
1).te
r Kanal ... .ter Kanal
N .ter Kanal
+
26µm
r=r
C
L
i
r=W +r i
K
K
Bild 2.15 Layout eines Drucktransistors mit NK radialsymmetrisch verlaufenden Kanälen
2.4 Aktive Drucksensoren 23
Aufgrund der Radialsymmetrie ist der Integrationsweg C für Kanalstrukturen mit einer geringen
Kanallänge L näherungsweise nur vom Radius r abhängig. Die Stromberechnung gemäß
Gleichung 2.22 erfolgt nur für einen Kanal und wird je nach Anzahl an Kanälen für die Be-
rechnung des druckabhängigen Gesamtstroms IDS(p) mit einem Faktor NK multipliziert. Damit
selbst bei Auflage der Abstand d(p,r) der Gateelektrode zur Kanaloberfläche realistisch vorher-
gesagt werden kann, wird - wie bereits zuvor bei den kapazitiven Druckdosen - der Abstand
über den nichtlinearen Ansatz berechnet. Da die Lösung der nichtlinearen DGL nur noch
numerisch mit der Methode der finiten Differenzen berechnet werden kann, wird das Kanal-
gebiet in endliche Teilbereiche ∆r zerlegt. Für jeden dieser Teilbereiche kann ein Abstand d(p,r)
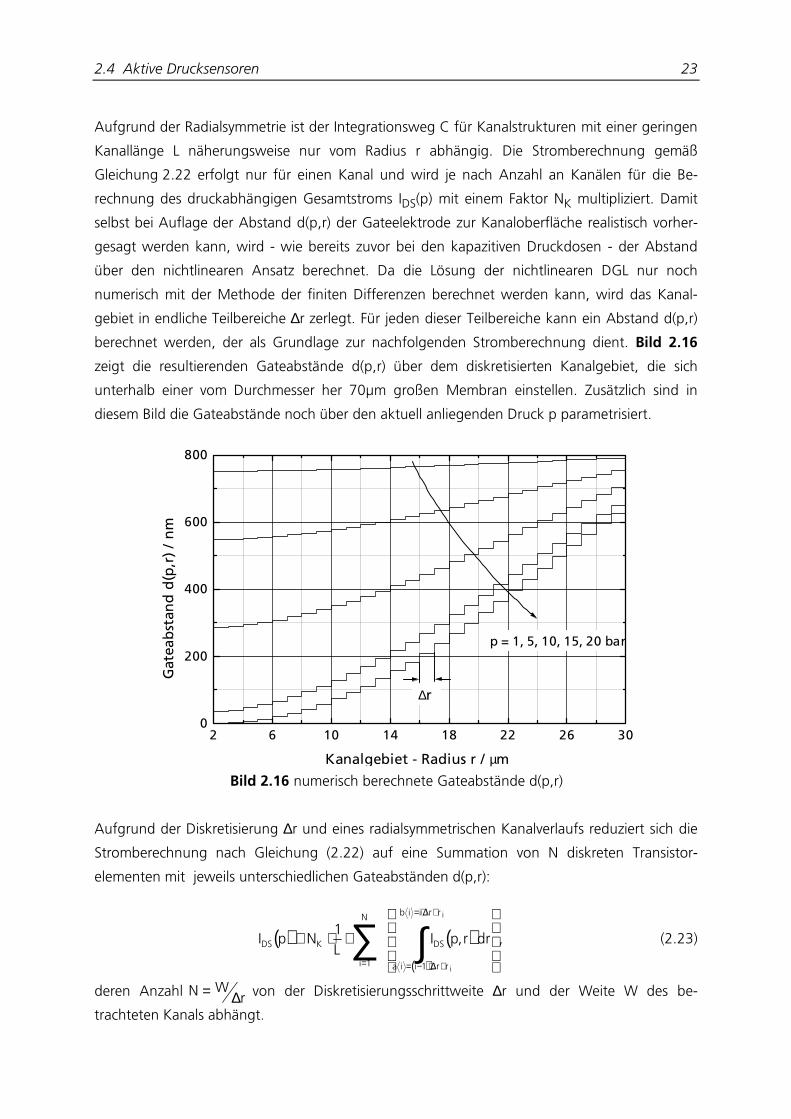
berechnet werden, der als Grundlage zur nachfolgenden Stromberechnung dient. Bild 2.16
zeigt die resultierenden Gateabstände d(p,r) über dem diskretisierten Kanalgebiet, die sich
unterhalb einer vom Durchmesser her 70µm großen Membran einstellen. Zusätzlich sind in
diesem Bild die Gateabstände noch über den aktuell anliegenden Druck p parametrisiert.
2 6 10 14 18 22 26 300
200
400
600
800
∆r
p = 1, 5, 10, 15, 20 bar
Gat
eab
stan
d d
(p,r
) /
nm
Kanalgebiet - Radius r / µm
Bild 2.16 numerisch berechnete Gateabstände d(p,r)
Aufgrund der Diskretisierung ∆r und eines radialsymmetrischen Kanalverlaufs reduziert sich die
Stromberechnung nach Gleichung (2.22) auf eine Summation von N diskreten Transistor-
elementen mit jeweils unterschiedlichen Gateabständen d(p,r):
( ) ( )( )
I p NL
I p r drDS K DS
a i i r r
b i i r r
i
N
i
i
≅ ⋅ ⋅
= − ⋅∆ +
= ⋅∆ +
=∫∑1
11
, , (2.23)
deren Anzahl N Wr= ∆ von der Diskretisierungsschrittweite ∆r und der Weite W des be-
trachteten Kanals abhängt.

24 2 Mikromechanische Sensoren
Die obere und untere Integrationsgrenze ist von dem Laufindex i der Summe abhängig und um
die radiale Anfangslage ri des betrachteten Kanals verschoben. Im hier vorliegenden Beispiel
aus Bild 2.15 besitzt ein Kanal eine Weite W von 28µm und beginnt bei einem Radius r=ri von
2µm. Da der Gateabstand d(p,r) aufgrund der Diskretisierung über ∆r als konstant angenom-
men werden kann, ist der Drainstrom IDS(p,r) eines diskreten Transistorelements ebenfalls
konstant und kann aus dem obigen Integral herausgezogen werden:
( ) ( )I p NL
I p a i drDS K DS
a i i r r
b i i r r
i
N
i
i
= ⋅ ⋅ ⋅
= − ⋅∆ +
= ⋅∆ +
=
=
∫∑1
11
28
,
( )
, (2.24)
wobei a i i r r i= − ⋅ +( )1 ∆ die untere und vom Laufindex i abhängige Integrationsgrenze angibt.
Eine einfache Integration der Gleichung (2.24) ergibt dann den Drainstrom IDS(p) des
Transistors, der nur noch vom Druck p abhängt:
( ) ( )I p Nr
LI p a iDS K DS
i
N
= ⋅ ⋅=
=
∑∆,
1
28
. (2.25)
Mit Hilfe der modifizierten MOS1-Modellgleichungen aus Anhang A, die bereits zuvor für die
Berechnung der veränderlichen Schwellenspannung, Leitfähigkeits- und Substrateffekt-
konstante verwendet wurden, kann der Drainstrom IDS(p) des mikromechanischen Druck-
transistors mit radialsymmetrisch verlaufenden Kanälen letztendlich durch die nachfolgenden
Stromgleichungen beschrieben werden. Dabei werden die Bereiche der schwachen sowie
starken Inversion unterschieden, und es werden zusätzlich nichtideale Effekte wie die Kanal-
längenmodulation und die Beweglichkeitsreduktion der im Kanal befindlichen Ladungsträger
berücksichtigt, die für eine ausreichende Genauigkeit des Modells sorgen. Für Gate-Source-
Spannungen UGS unterhalb einer sogenannten Einschaltspannung:
( ) ( ) ( )U p r U p r n p r UON T S temp, , ,= + ⋅ (2.26)
mit: ( )
( ) ( )
( )n p r
q NFSp r C p r
U
C p rS
g
S BS
g
,
, ,
,
'
'= +
⋅ +⋅
⋅ −1
2
γ
Φ. (2.27)
befindet sich der Kanal des Transistors im Zustand der schwachen Inversion und der Drainstrom
IDS(p) berechnet sich in diesem Bereich zu:
( ) ( )( )( )I p N
rL
IU U p a i
n p a i UDS K DSONGS ON
S tempi
N
= ⋅ ⋅ ⋅−
⋅
=
=
∑∆exp
,
,1
28
(2.28)
Überschreitet dagegen die Gate-Source-Spannung UGS den Wert der Einschaltspannung UON,
so verläßt der Transistor den Bereich der schwachen Inversion und geht in die starke Inversion
über. In der starken Inversion sind je nach Drain-Source-Spannung zwei Bereiche - das Trioden-

2.4 Aktive Drucksensoren 25
und das Sättigungsgebiet - zu unterscheiden. Ist die Drain-Source-Spannung UDS kleiner als die
Sättigungsspannung UDSAT, so befindet sich der Transistor im Triodengebiet, und es gilt die
nachfolgende Stromgleichung:
( )( ) ( )( ) ( )
( )( )( )I p N
rL
B p a i U U p a i U U U
U U p a iU
E L
DS K
GS T DS DS DS
GS TDS
C eff
i
N
= ⋅ ⋅⋅ − − ⋅
⋅ ⋅ + ⋅
+ ⋅ − ⋅ +⋅
=
=
∑∆
Θ
0
1
2812
1
1 1
, ,
,
λ. (2.29)
Wird die Drain-Source-Spannung UDS größer als die zuvor erwähnte Sättigungsspannung
UDSAT, geht der mikromechanische Transistor in das Sättigungsgebiet über, und der Strom
berechnet sich gemäß der nachfolgenden Gleichung in Abhängigkeit vom Druck p zu:
( )( ) ( )( ) ( )
( )( )( )I p N
rL
B p a i U U p a i U U U
U U p a iU
E L
DS K
GS T DSAT DS DS
GS TDSAT
C eff
i
N
= ⋅ ⋅⋅ − − ⋅
⋅ ⋅ + ⋅
+ ⋅ − ⋅ +⋅
=
=
∑∆
Θ
0
1
2812
1
1 1
, ,
,
λ(2.30)
Mit Hilfe dieses Modells kann die Druckcharakteristik, d.h. das Verhalten des Drainstrom IDS
über dem aktuell anliegenden Druck p simuliert werden [25]. Mit Hilfe dieser Ergebnisse kann
die Empfindlichkeit des Drucktransistors berechnet werden. Zur vollständigen Beschreibung des
Drucktransistors müssen noch die Ausgangs- und Eingangskennlinienfelder angegeben werden.
Alle nachfolgenden Simulationsergebnisse des mikromechanischen Drucktransistors basieren
auf einem Membranradius ra von 35µm und einer Kanallänge L von 3,6µm. Zusätzlich werden
die in der Tabelle 2.1 aufgelisteten mechanischen, geometrischen und technologischen Para-
meter als Berechnungsgrundlage verwendet.
Tabelle 2.1 verwendete Parameterliste für den Drucktransistor
Elastizitätsmodul E 8·1010 N/m²
Querkontraktionszahl ν 0,3
Biegesteifigkeit der Membran D 2,473·10-8 kg·m²/sec²
Dicke der Membran h 1,5µm
Membranradius ra 35µm
Gateabstand bei p=0bar d(0,r) 800nm
Isolatordicke von Si3N4 dSi3N4125nm
Substratdotierung NSUB 1·1015 cm-3
Oberflächenladungsdichte NSS 6·1010 cm-2
Dotierung der Membran NGATE 1·1020 cm-3

26 2 Mikromechanische Sensoren
Bei Verwendung der in der Tabelle 2.1 aufgelisteten mechanischen, geometrischen sowie
technologischen Parameter kann die Druckcharakteristik berechnet werden, die in dem nach-
folgenden Bild 2.17 dargestellt ist. Ein Vergleich mit der Druckabhängigkeit des kapazitiven
Sensorelements aus Bild 2.9 ergibt eine große Ähnlichkeit der Kurvenverläufe. Diese Tatsache ist
nicht weiter verwunderlich, da die strombestimmenden Größen wie Schwellenspannung und
Leitfähigkeitskonstante ausnahmslos über die Änderung der flächenbezogenen Gatekapazität
C´g(p,r) moduliert werden.
Typisch ist hier der exponentiell ansteigende Verlauf vor Auflage der Membran auf der
Kanaloberfläche und die lineare Abhängigkeit nach dem Erreichen des Auflagepunktes. Der
Auflagepunkt liegt im Gegensatz zu Bild 2.9 bei einem Druck von 16bar, da der Radius der
beweglichen Membran mit 35µm deutlich kleiner gewählt wurde. Unterhalb des Auflagedrucks
pA wird die Stromänderung von der durch die umgekehrt proportional zum Gateabstand d(p,r)
abhängige Leitfähigkeitskonstante B0 dominiert. Nach der Auflage der Membran steigt der
Strom nur noch linear mit zunehmendem Druck p an, da sich die Membran über die Weite W
des Kanals abrollt. Die mechanischen Eigenschaften der Membran unterliegen technologischen
Schwankungen, so daß der Auflagedruck pA innerhalb einer gewissen Grenze (~5% vom ge-
wünschten Auflagedruck [26]) variiert. Zusätzlich zu dieser Tatsache führt das starke Ansteigen
der Nichtlinearität kurz vor der Auflage zu einer Limitierung des Arbeitsbereiches auf Werte, die
erfahrungsgemäß bei der Hälfte des Auflagedrucks pA liegen.
1 4 7 10 13 16 19
1
2
3
4
5
6
7
UDS = 5V, UBS = 0V Auflagepunkt der Membran
UGS = 20, 18, ... ,0V
Dra
inst
rom
ID
S /
mA
Druck p / bar
Bild 2.17 Druckcharakteristik des mikromechanischen Drucktransistors

2.4 Aktive Drucksensoren 27
Bild 2.18 zeigt die aus Bild 2.17 berechnete Empfindlichkeit S=∂IDS/∂p des Drucktransistors in
Abhängigkeit vom Druck p mit der Gate-Source-Spannung UGS als Parameter. Die Empfindlich-
keit steigt unterhalb des Auflagedrucks pA mit zunehmendem Druck an. Kurz nach Erreichen
des Auflagedrucks nimmt die Empfindlichkeit auf einen konstanten Wert ab, da der Strom aus
Bild 2.17 nur noch linear mit einer geringeren Steigung anwächst. Zudem kann über eine
größere Gate-Source-Spannung die Empfindlichkeit weiter gesteigert werden. Die Empfindlich-
keit liegt bei der Hälfte des Auflagedrucks mit Werten zwischen 2,3nA/mbar und 80nA/mbar
um ein Vielfaches niedriger als beim Auflagedruck. Hier liegen die erreichbaren Werte je nach
Gate-Source-Spannung UGS zwischen 0,35µA/mbar und 1,6µA/mbar deutlich über den Werten
beim halben Auflagedruck.
1 3 5 7 9 11 13 15 17 190,0
0,4
0,8
1,2
1,6
2,0
UGS=2, 4, ... , 20 V
Auflagepunktder Membran
UDS = 5V, UBS = 0V
Druck p / bar
Emp
fin
dli
chke
it S
=d
I DS
/ d
p /
(µ
A /
mb
ar)
Bild 2.18 Empfindlichkeit S des mikromechanischen Drucktransistors
Zur vollständigen Charakterisierung des Drucktransistors kommt noch das Ausgangs- und
Eingangskennlinienfeld hinzu. Beim Ausgangskennlinienfeld in Bild 2.19 ist nicht wie üblich die
Gate-Source-Spannung UGS, sondern der Druck p als Parameter aufgetragen. Die Gate-Source-
Spannung wurde bei der Aufnahme des Ausgangskennlinienfeldes fest auf 5V gehalten,
während der Druck p von 1 bis 20bar mit einer Schrittweite von 1bar variiert wurde. Bis zur
Auflage der Membran steigt der Strom umgekehrt proportional zum Druck p an. Nach der
Auflage ändert sich der Strom mit zunehmendem Druck p nur noch linear in äquidistanten
Schritten. Durch den implementierten Effekt der Kanallängenmodulation in das Modell des
Drucktransistors steigt der Drainstrom auch nach dem Erreichen der Sättigungsspannung UDSAT
weiter an, wodurch der Ausgangswiderstand einen endlichen Wert annimmt.
28 2 Mikromechanische Sensoren
0 5 10 15 200,0
0,5
1,0
1,5
2,0
2,5 UGS = 5V, UBS = 0V
p=1, 2, ... ,20bar
Dra
inst
rom
ID
S /
mA
Drain-Source-Spannung UDS / V
Bild 2.19 Ausgangskennlinienfeld des mikromechanischen Drucktransistors
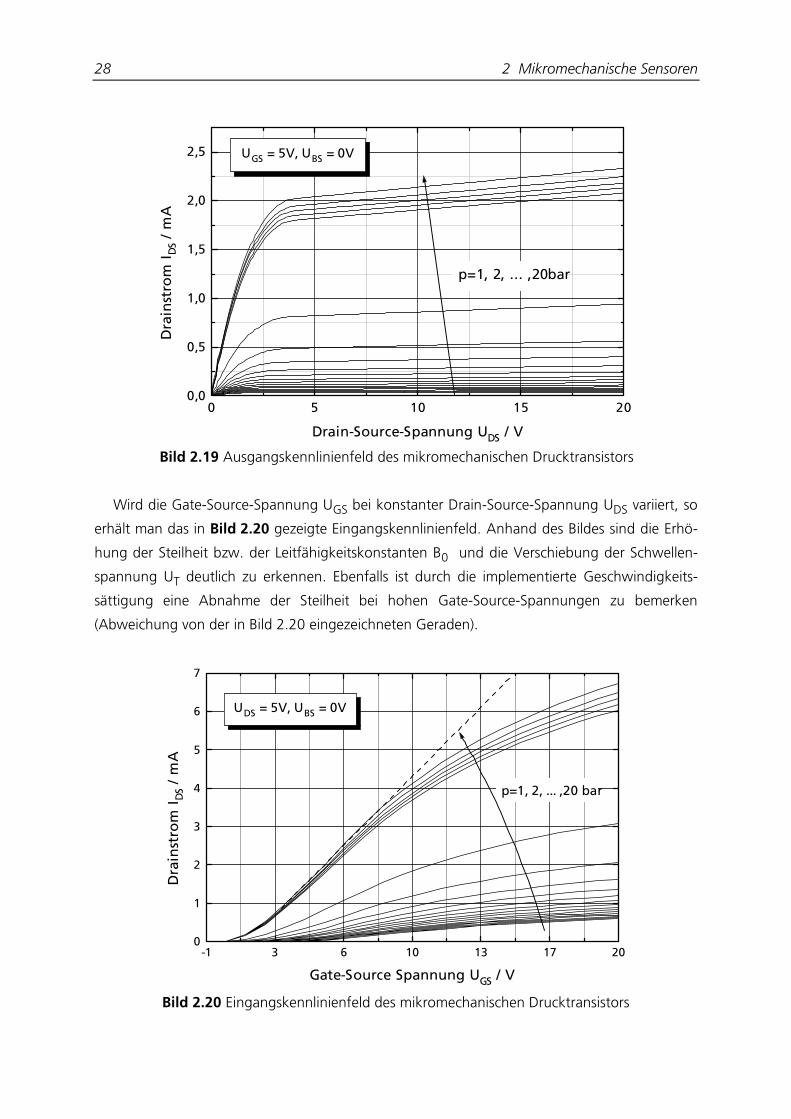
Wird die Gate-Source-Spannung UGS bei konstanter Drain-Source-Spannung UDS variiert, so
erhält man das in Bild 2.20 gezeigte Eingangskennlinienfeld. Anhand des Bildes sind die Erhö-
hung der Steilheit bzw. der Leitfähigkeitskonstanten B0 und die Verschiebung der Schwellen-
spannung UT deutlich zu erkennen. Ebenfalls ist durch die implementierte Geschwindigkeits-
sättigung eine Abnahme der Steilheit bei hohen Gate-Source-Spannungen zu bemerken
(Abweichung von der in Bild 2.20 eingezeichneten Geraden).
-1 3 6 10 13 17 200
1
2
3
4
5
6
7
UDS = 5V, UBS = 0V
p=1, 2, ... ,20 bar
Dra
inst
rom
ID
S /
mA
Gate-Source Spannung UGS / V
Bild 2.20 Eingangskennlinienfeld des mikromechanischen Drucktransistors

2.4 Aktive Drucksensoren 29
Ein sicheres Anzeichen für das Aufliegen der Gateelektrode auf der Kanaloberfläche ist un-
mittelbar nach der maximalen Stromänderung - kurz vor Auflage der Membran - ein nahezu
lineares Ansteigen des Drainstroms.
Zur Verifizierung der Simulationsergebnisse wurden für den zuvor behandelten Druck-
transistor Teststrukturen angefertigt. Bild 2.21 a) zeigt den fertig prozessierten Drucktransistor
als Sensorelement, bei dem das zusätzlich versteifende Siliziumoxid oberhalb der Membran
entfernt wurde. Im Gegensatz dazu wurde beim Referenzelement aus Bild 2.21 b) das Silizum-
oxid zur zusätzlichen Versteifung auf der Membran belassen. Sensor- und Referenzelement
besitzen dabei einen Membranradius ra von jeweils 35µm. Die Temperaturabhängigkeit kann
über eine Differenz- oder Quotientenbildung zwischen Sensor- und Referenzkapazität stark
unterdrückt werden, da Sensor- und Referenzelement nahezu den gleichen Temperaturgang
besitzen. Speziell die Quotientenbildung kann sehr einfach über einen Stromspiegel realisiert
werden.
DrainBulk Source
Gate
Drain SourceBulk
Gate
a) b)
Bild 2.21 a) Chipphotografie des Sensorelements (ra=35µm)
b) des Referenzelements (ra=35µm)
Erste Messungen an den Teststrukturen bestätigten das zuvor ausführlich beschriebene physika-
lische Prinzip des Drucktransistors. Bild 2.22 zeigt ein gemessenes Ausgangskennlinienfeld, bei
dem die Gate-Source-Spannung UGS konstant auf einem festen Potential gehalten und der
Druck p variiert wurde. Der Druck wurde vom Umgebungsdruck aus bis zu einem Druck von
21bar mit einer gleichmäßigen Schrittweite von jeweils 2bar erhöht. Bei der Messung der Test-
strukturen stellte sich jedoch heraus, daß der Transistor im Gegensatz zu den zuvor simulierten
Ergebnissen im Vakuum selbstleitendes Verhalten zeigte und erst mit steigendem Druck zu-
nehmend gesperrt werden konnte. Erinnern wir uns hierzu an den Anfang des Unterkapitels, in
dem die Abhängigkeit der Schwellenspannung von der Anzahl an Oberflächenladungen unter-
sucht wurde.

30 2 Mikromechanische Sensoren
Fazit war, daß mit zunehmender Oberflächenladungsdichte der Transistor zunehmend selbst-
leitendes Verhalten zeigte, d.h. die Schwellenspannung zu negativen Werten hin anstieg. Da
keine konkrete Aussage über die Oberflächenqualität des Siliziumnitrids getroffen werden
konnte, wurde für die Simulationen, deren Ergebnisse in den Bildern 2.17 bis 2.20 dargestellt
sind, eine Oberflächenladungsdichte von 6·1010cm-2 angenommen, die der Güte eines
üblichen Gateoxids entspricht, obwohl schon im vorhinein die Vermutung nahe lag, daß die
Siliziumnitritschicht diese Oberflächengüte nicht erreichen würde.
0 5 10 15 200
5
10
15
Messung
Dra
inst
rom
I DS
/ m
A
Drain-Source Spannung UDS / V
p=1, 3 .. 21bar
0 5 10 15 200
5
10
15
p=1, 3 .. 21bar
Drain-Source Spannung UDS / V
Model
Bild 2.22 Vergleich der Ausgangskennlinienfelder: Messung und Modell mit angepaßter Ober-
flächenladungsdichte NSS
Alle Meßergebnisse deuteten darauf hin, daß die stark negative Schwellenspannung auf eine
hohe Anzahl an festen, positiven Ladungen in der Siliziumnitridschicht zurückzuführen ist. Diese
festen Ladungen entstehen zum einen durch eine unebene Oberflächenstruktur und zum
anderen durch nachfolgende Temperaturschritte im Herstellungsprozeß, indem Verbindungen
an der Oberfläche aufbrechen und feste Ladungen hinterlassen, die je nach Vorzeichen die
Schwellenspannung erhöhen oder erniedrigen. Durch eine Änderung der Oberflächenladungs-
dichte im Modell um mehr als eine Zehner-Potenz auf 1,65·1012cm-2 konnte diese Vermutung
bestätigt werden, da das gemessene und simulierte Verhalten mit der modifizierten Ober-
flächenladungsdichte sehr gut übereinstimmte. Die Ursache der verbleibenden Abweichung
zwischen Messung und Modell kommt zum Großteil durch die mechanische Modellierung der
Membrandurchbiegung zustande. Einziges Manko bei den ersten vorliegenden Teststrukturen

2.4 Aktive Drucksensoren 31
war die stark negative Schwellenspannung, die bei üblichen Gate-Source-Spannungen von 0-5V
nur den Betrieb des Transistors im Triodengebiet zuläßt. Somit verhält sich der mikro-
mechanische Transistor wie ein druckabhängiger Widerstand. In diesem Gebiet erreicht der
Transistor nicht die Empfindlichkeit, die er im Sättigungsbetrieb erzielen würde. Zur Erhöhung
der Schwellenspannung gibt es mehrere Möglichkeiten. Eine dieser Möglichkeiten ist eine
Schwellenspannungsimplantation, die die festen Ladungen in der Siliziumnitridschicht
neutralisiert. Desweiteren kann über einen Verschluß der Druckdosen mit Siliziumoxid und einer
nachfolgenden Versiegelung mit Siliziumnitrit nachgedacht werden [26]. Diese Maßnahme
verhindert die Siliziumnitridabscheidung im Inneren der Druckdose. Der abschließende Nitrit-
verschluß würde weiterhin eine zuverlässige Gasdichtigkeit der Druckdose gewährleisten. Die
Vermutung, daß die Siliziumoxidschicht eine geringere Oberflächenladungsdichte besitzt als die
Schicht aus Siliziumnitrid, kann jedoch nur die Herstellung und eine anschließende Messung
zeigen. Eine dritte Möglichkeit besteht darin, den Transistor vollständig aus der Druckdose
herauszuziehen, wie in Bild 2.23 zu sehen ist.
Drain
SourceInjektor
Gate
control-Gate
DruckdoseStandard-T ransistormit EEPROM-Opt ion
f loatende Verbindungn+ Poly
Bild 2.23 Drucktransistor mit EEPROM-Option
Die Dose dient wieder als druckempfindliche Kapazität, deren Polysilizium-Membran direkt an
das Gate eines Standardtransistors mit definierter Schwellenspannung angeschlossen wird. Als
Gate des Transistors fungiert nun die ganzflächige n+-Gegenelektrode der druckempfindlichen
Kapazität. Da die Verbindung zwischen Druckdose und Transistor "floatend" ist, wird eine
EEPROM-Option eingebaut [27]. Mit Hilfe eines sog. "control-Gates" und eines Injektors ist es
möglich, den Arbeitspunkt des Transistors bzw. das Potential der floatenden Verbindung
zwischen der Polysilizium-Membran der Druckdose und dem Gate des Transistors gezielt einzu-
stellen, wenn zwischen Injektor und control-Gate eine hohe Spannung angelegt wird. Je nach
Polarität können positive oder negative Ladungsträger über ein spezielles Tunneloxid auf die
floatende Verbindung gelangen und dort das Potential der Gateelektrode verändern. Wird die
hohe Spannung zwischen control-Gate und Injektor zurückgenommen, so können die auf die
floatende Verbindung aufgebrachten Ladungsträger nicht mehr entweichen. Somit bleibt das
zuvor eingestellte Potential auf der floatenden Verbindung erhalten, bzw. gespeichert. Dieses
Potential kann jederzeit wieder verändert oder gelöscht werden.