uas research in support of odot operations fleet •vehicles selected to best meet odot’s...
TRANSCRIPT

UAS Research in Support of
ODOT Operations

Research Team• Profs: Arthur Helmicki, Victor Hunt, Kelly Cohen, Manish Kumar
• Staff: Mahdi Norouzi, Bryan Brown
• Students: Paul Guentert, Chan Ventkatesh, Niranjan Krishnan, Arjun Chiddarwar
Scope of Work• Acquire the sensors and hardware and develop supporting software in order to
integrate into prototype systems.
• Test and demonstrate prototype systems for select identified missions.
• Develop mission SOPs and training.
• Deliver all prototype equipment and supporting materials to ODOT.
Project Objectives• How can we improve ODOT core business functions by application of drone
technologies?
• What are these missions? What drone configurations and capabilities are necessary to perform these missions?

Market SurveyPlatform Test Location Application
Location
Subject Matter
Expert
Mission 1:
Aerial Photography/GIS
Mission 2:
Exterior Inspection
Mission 5:
Construction Site Inspection
Mission 6:
Remote Inspection
Mission 7b:
Accident Scene
Platform Development,
Sensor testing and Software
integration
Intel Aero,
FlamewheelUC Victory Pkwy
Labs, Summit Park
Wilmington Air
Park
Fred Judson
Mission 4:
Traffic MonitoringMission 5:
Construction Site Inspection
Mission 7a:
Quick Clear
Gro
up
3 Mission 3:
Interior Inspection
VGCS Prototype,
Intel Aero, Hybrid
UC Victory Pkwy
Facility
JM, FWW, Other Fred Judson, TBD
Gro
up
4 Mission 10:
LIDAR
TBD Wilmington Airpark TBD Fred Judson, TBD
Mission 8:
Search and Rescue
Mission 9:
Fire Monitoring &
Chemical Cloud Detection
Mission 11:
MARCS/Communications
Gro
up
1G
rou
p 2
Oth
er/
Seco
nd
ary
DJI Matrice
100/210, VGCS
Prototype
Sites TBD by
Subject Matter
Experts, candidate
sites under
discussion
Summit Park,
Wilmington
Airpark, MUTC, UC
Victory Pkwy Labs
Hoverfly Typhoon
Summit Park,
Wilmington
Airpark, MUTC, UC
Victory Pkwy Labs
Sites TBD by
Subject Matter
Experts, candidate
sites under
discussion
Fred Judson, TAC,
Mike Brokaw,
Brandon Collett,
Stephan Mather
Fred Judson, TAC,
Carl Merckle, John
McAdam, Bryan
Comer
Matrice, Hoverfly,
Aero, other
UC Victory Pkwy
Labs, Summit Park,
Wilmington Airpark
WVa, MUTC, Other Fred Judson, TBD
Focus
• Survey/Questionnaire• 60+ responses from across ODOT as
well as externally (ODNR, Ohio Patrol, Turnpike, Ohio National Guard, Cleveland Metroparks, etc)
• Review of UAS Market• 400+ vendors
• Market rapidly evolving
• Identified and rank ordered 11 potential mission scenarios
• Initial focus given to Groups 1 and 2

Results to date
• Drone Fleet Acquisition
• VGCS, Interior Inspection
• Jeremiah Morrow, Real-time Milestone Uplink, and MUTC
• Automated Traffic Monitoring
• Image Analysis/Processing
• Common Operating Platform
• Visualization techniques (Hololens AR and VR Goggles)

Drone Fleet • Vehicles selected to best meet ODOT’s application needs
• Used for mapping, inspection, aerial imagery
• Manual and waypoint navigation
• Yuneec Typhoon H with CGO3+ 4K Camera• Up to 25 minute flight time• Live HD Video Link
• DJI Matrice 100 with X5, Z3, and Z30 Cameras• Up to 25 minute flight time• Z3 offers 3x optical zoom • Z30 offers 30x optical zoom• X5 offers high resolution imagery for mapping• SDKs emerging for customization• Compatible with Pix4DCapture, DJI GSPro, Drone Deploy and others

Drone Fleet (cont.)• Intel Aero
• Developmental platform for multiple UAV control
• Allows user to operate multiple drones through single web-based ground station
• Equipped with ADS-B and Intel Realsense for Obstacle Avoidance of other drones, aircraft, and other objects
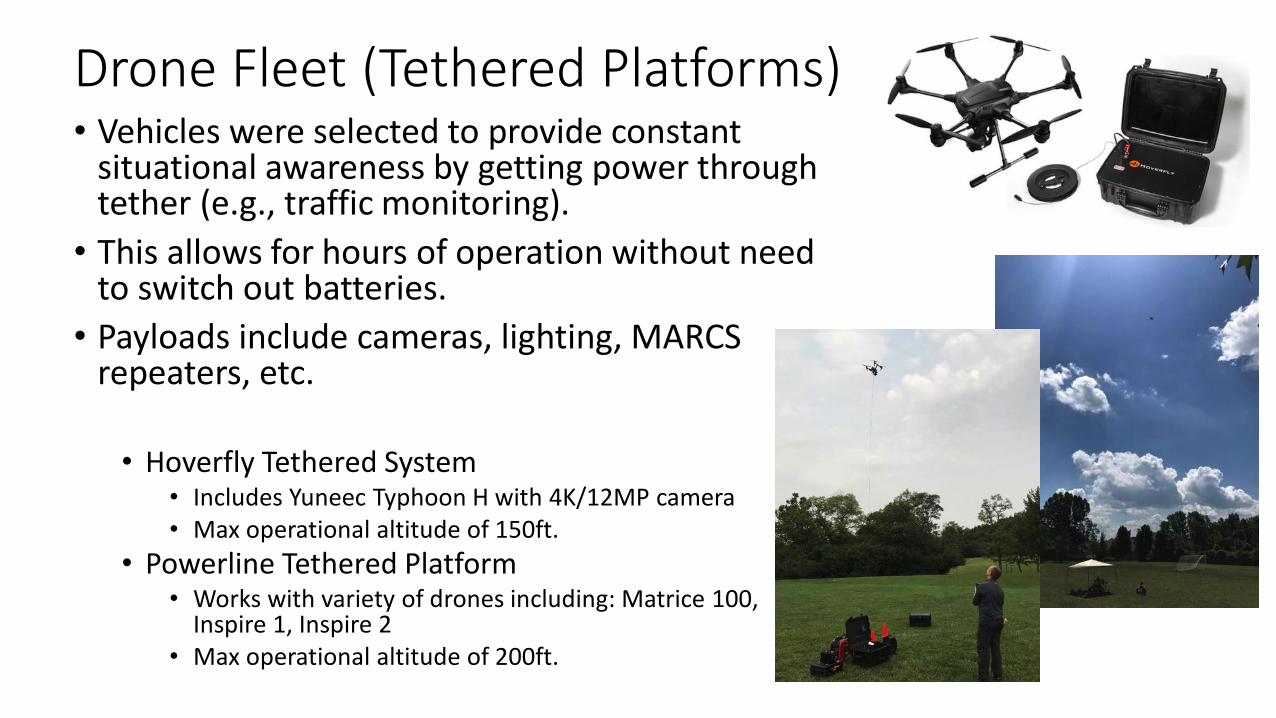
Drone Fleet (Tethered Platforms)• Vehicles were selected to provide constant
situational awareness by getting power through tether (e.g., traffic monitoring).
• This allows for hours of operation without need to switch out batteries.
• Payloads include cameras, lighting, MARCS repeaters, etc.
• Hoverfly Tethered System• Includes Yuneec Typhoon H with 4K/12MP camera• Max operational altitude of 150ft.
• Powerline Tethered Platform• Works with variety of drones including: Matrice 100,
Inspire 1, Inspire 2• Max operational altitude of 200ft.

Drone Fleet (Upcoming Platform) • DJI Matrice 210 RTK:
• Flight Autonomy
• IP43 Waterproofing
• ADS-B Receiver
• Dual Battery, up to 38 min flight time
• Multiple Payload Configurations
• Camera Payloads:• XT Thermal Camera
• Z30 30x Optical Zoom Camera
• X5 4K/16MP Camera
• Anticipated delivery in Sept/Oct 2017

Interior Inspection - VGCS

Concept Vehicles

Lessons Learned thru Engagement and Feedback
• Obstacle/Collision Avoidance and Stability Control
• Dust Cloud Issue
• Increased the Flight Time
• Simplified Manual Control
• Need to Perch for Extended Duration and for Inspection in Tight Spaces

Jeremiah Morrow Demolition
Video Encoder
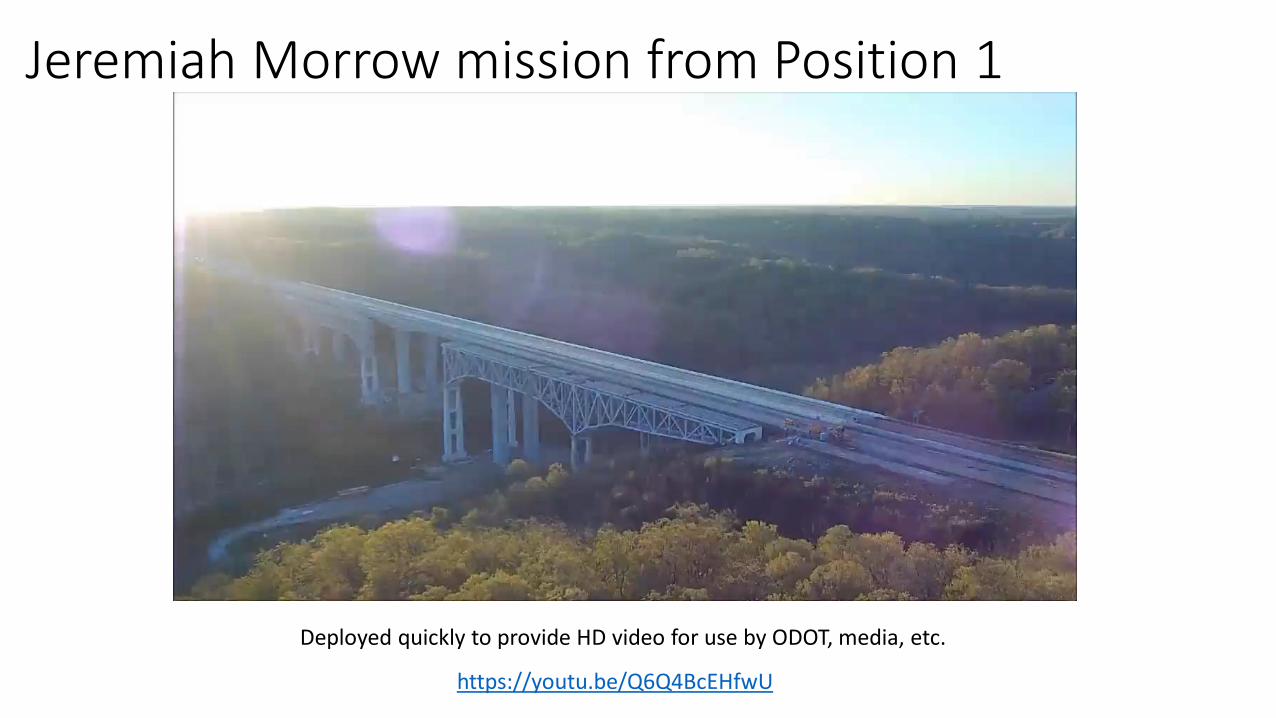
Jeremiah Morrow mission from Position 1
Deployed quickly to provide HD video for use by ODOT, media, etc.
https://youtu.be/Q6Q4BcEHfwU

Milestone Uplink Box Objective• Capture Video from Drone • Transfer Video to ODOT Video Servers (Milestone) Real-time• Stream data for local officials
Video Feed
Control commands
Remote Users
SmartphoneLaptopGoggles
On-site Users

Situational Awareness, MUTC Emergency Preparedness Exercise
• Realtime video capture from drone and uplink to Milestone• Stream data for local and remote officials

Traffic Video ProcessingTraffic Analysis
• Off the shelf software doesn’t present drone video solution or is cost prohibitive
• Performed case studies of different drone video analysis solutions
• Currently implementing and testing robust detection process
Proposed Method of Video Analysis
Individual Lane Detection
Multi-Object Detection
Combination of Methods
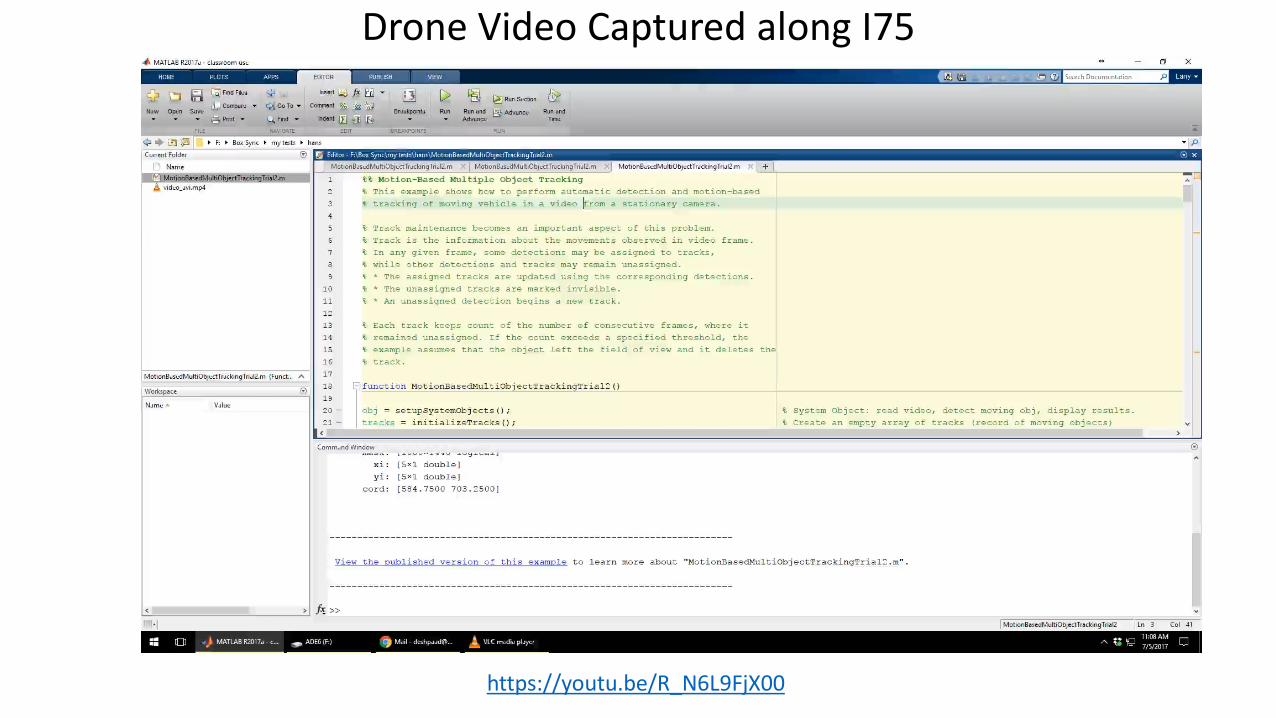

Image Analysis/Processing (Mapping, Surveying, 3D Modeling)
Capture Process AnalyzePlan
Pix4DCaptureDJI GSPro
Matrice 100Matrice 210 RTKFalcon 8+
Pix4DODM
GreyhoundEntwynePotree
Custom UCII website

Some sample modelsAccident scene recreation Construction site management Survey and Mapping
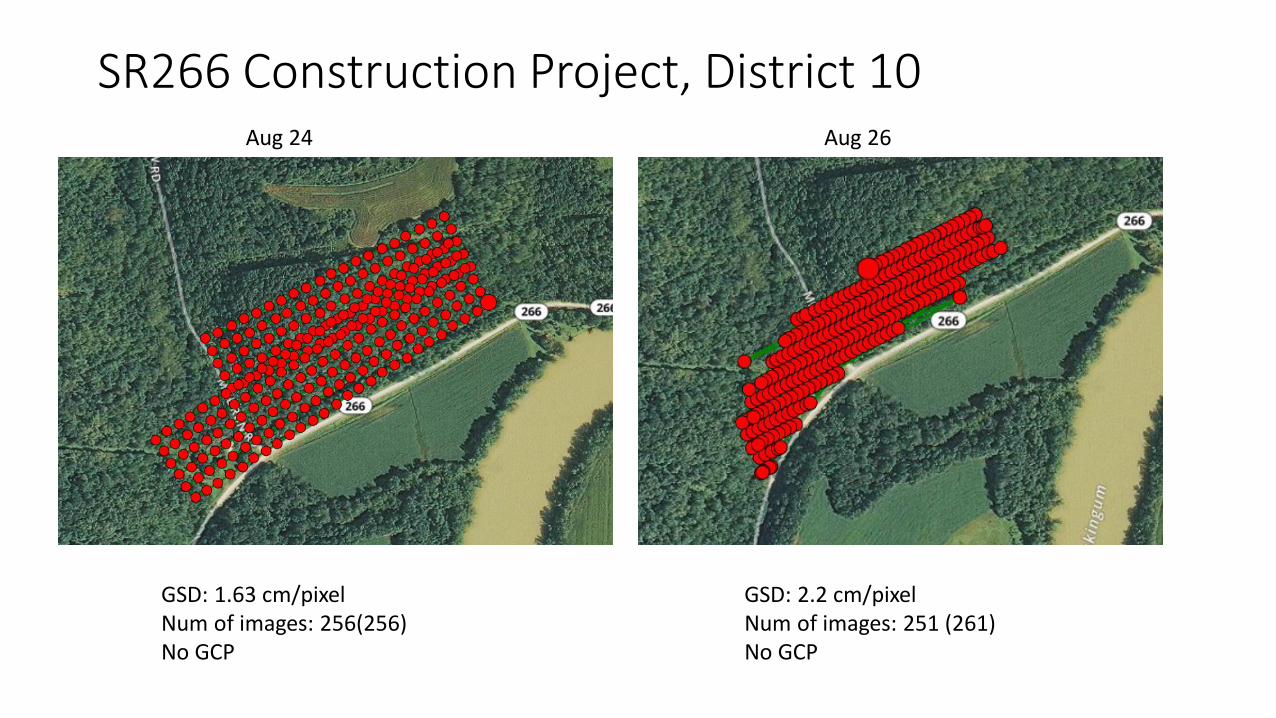
SR266 Construction Project, District 10
GSD: 1.63 cm/pixelNum of images: 256(256)No GCP
GSD: 2.2 cm/pixelNum of images: 251 (261)No GCP
Aug 24 Aug 26

Comparison – Measurements and AnalysisAug 24 Aug 26

Common Operating Platform Objective• Central system for archiving documents, aerial images and videos• Back-end for automated processing, transforming images to 3D
models, etc• Front-end to enable the user to interact with 3D models through the
website or through AR/VR tools (e.g., Hololens)
Website Authentication
Upload Raw Data
• 3D Model Generation • Model post-processing for fast
presentation on the website• Model post-processing for
presentation on Virtual Reality Goggles
• Realtime traffic analysis
Present the processed 3D model
to the user
Database
Processing Server
WebsiteUsers


Virtual/Augmented Reality objectiveProvide shared Interaction with 3D models (users at different physical locations)• Interaction with models looking at the Avatar of other users • Share notes with other users• Talk to each other using the VoIP technology
