timing and stability in cellular automata - tbi.univie.ac.at · timing and stability in cellular...
TRANSCRIPT

Timing and stability in cellular automata
Konstantin Klemm
Bioinformatics GroupUniversity of Leipzig, Germany
Konstantin Klemm (Leipzig) Timing & Stability in CA 1 / 25

Definition
finite set of states S , often |S | = 2
mapping (“rule table”) f : Sz → S
a lattice of n sites with coordination number z where site i hasneighbours a(i , 1), a(i , 2), . . . a(i , z)
time-discrete dynamics of lattice site i
si (t + 1) = f [sa(i ,1)(t), . . . sa(i ,z)(t)]
All lattice sites are updated in synchrony.
Konstantin Klemm (Leipzig) Timing & Stability in CA 2 / 25
Purpose
Computer Science: Models of computation,e.g. “Game of Life” and “rule 110” are Turing-complete.
Artificial Life: Study of self-reproducing structures
Physics: Abstractions of spatio-temporal dynamics, pattern formation
Motto: Simplest rules may yield most complex patterns / computations.
Konstantin Klemm (Leipzig) Timing & Stability in CA 3 / 25

Putative CA dynamics on plant leaves
Peak et al., PNAS (2004)
Konstantin Klemm (Leipzig) Timing & Stability in CA 4 / 25
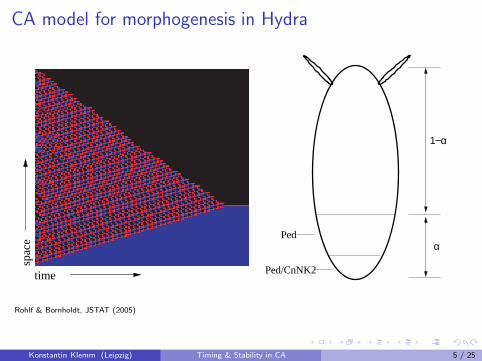
CA model for morphogenesis in Hydrasp
ace
time
Ped
Ped/CnNK2
α
1−α
rump
foot
Rohlf & Bornholdt, JSTAT (2005)
Konstantin Klemm (Leipzig) Timing & Stability in CA 5 / 25

Seashell
Konstantin Klemm (Leipzig) Timing & Stability in CA 6 / 25
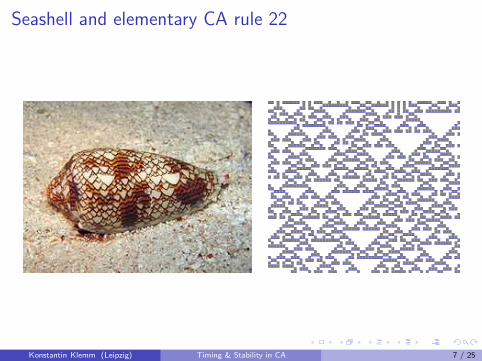
Seashell and elementary CA rule 22
Konstantin Klemm (Leipzig) Timing & Stability in CA 7 / 25

Seashell and elementary CA rule 30
Konstantin Klemm (Leipzig) Timing & Stability in CA 8 / 25

Role of noise?
Are the observed patterns robust under small stochasticperturbations?
Stability analysis in continuous dynamical systems: Make a smallperturbation and check if the system returns to the fixed point / limitcycle.
Here: Discretized state space. What is a “small” perturbation?
“Typical” implementation of noise in CA:
Stochastic asynchronous update
Konstantin Klemm (Leipzig) Timing & Stability in CA 9 / 25
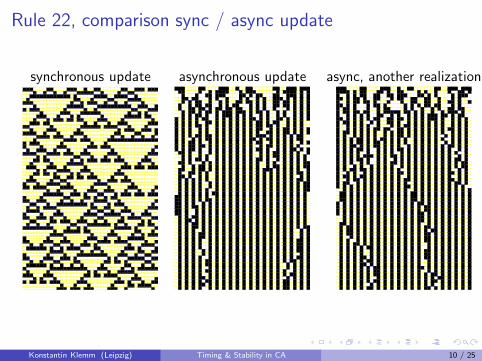
Rule 22, comparison sync / async update
synchronous update asynchronous update async, another realization
Konstantin Klemm (Leipzig) Timing & Stability in CA 10 / 25

Rule 150, comparison sync / async update
synchronous update asynchronous update async, another realization
Konstantin Klemm (Leipzig) Timing & Stability in CA 11 / 25

Rule 90, comparison sync / async update
synchronous update asynchronous update async, another realization
Konstantin Klemm (Leipzig) Timing & Stability in CA 12 / 25
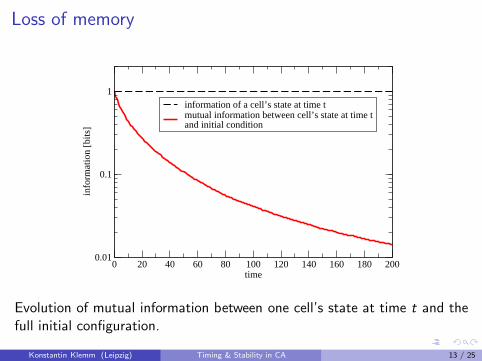
Loss of memory
0 20 40 60 80 100 120 140 160 180 200time
0.01
0.1
1in
form
atio
n [b
its]
information of a cell’s state at time tmutual information between cell’s state at time tand initial condition
Evolution of mutual information between one cell’s state at time t and thefull initial configuration.
Konstantin Klemm (Leipzig) Timing & Stability in CA 13 / 25
Summary so far
Deterministic CA:“Complex” (interesting) spatio-temporal pattern formation
CA with noise implemented as stochastic update order:Largely irreproducible dynamics
Devastating effect of stochastic asynchronous update known for long,cf. Ingerson and Buvel, Physica D (1984)
Konstantin Klemm (Leipzig) Timing & Stability in CA 14 / 25

How to proceed
Solution 0
Use more states and more complicated interactions to implementadditional clock signalscf. Nehaniv, Int. J. Alg. Comp. (2004)
Solution 1
Stick to simple rules
Consider a less destructive type of perturbation.
Get happy.
Konstantin Klemm (Leipzig) Timing & Stability in CA 15 / 25
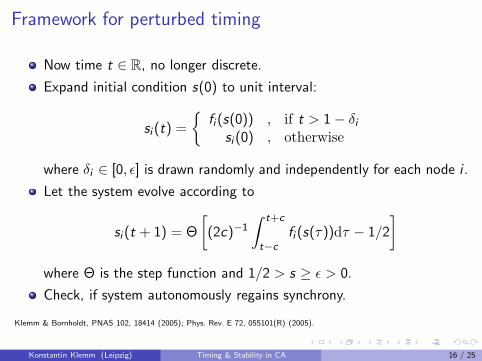
Framework for perturbed timing
Now time t ∈ R, no longer discrete.
Expand initial condition s(0) to unit interval:
si (t) =
{
fi(s(0)) , if t > 1 − δi
si (0) , otherwise
where δi ∈ [0, ǫ] is drawn randomly and independently for each node i .
Let the system evolve according to
si (t + 1) = Θ
[
(2c)−1
∫
t+c
t−c
fi (s(τ))dτ − 1/2
]
where Θ is the step function and 1/2 > s ≥ ǫ > 0.
Check, if system autonomously regains synchrony.
Klemm & Bornholdt, PNAS 102, 18414 (2005); Phys. Rev. E 72, 055101(R) (2005).
Konstantin Klemm (Leipzig) Timing & Stability in CA 16 / 25

CA rule 22, initial timing perturbation
Konstantin Klemm (Leipzig) Timing & Stability in CA 17 / 25
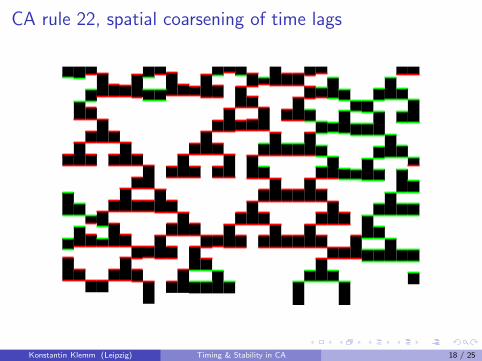
CA rule 22, spatial coarsening of time lags
Konstantin Klemm (Leipzig) Timing & Stability in CA 18 / 25
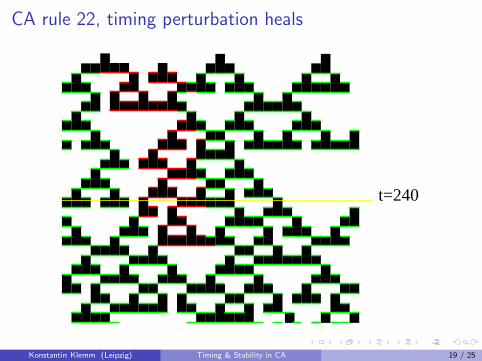
CA rule 22, timing perturbation heals
t=240
Konstantin Klemm (Leipzig) Timing & Stability in CA 19 / 25

Probability of healing
0 200 400 600 8000
0.2
0.4
0.6
0.8
1
prob
. tha
t per
turb
atio
n he
als
out
CA rule 22
0 200 400 600 800number of cells N
CA rule 150
0 200 400 600 800
CA rule 110
Konstantin Klemm (Leipzig) Timing & Stability in CA 20 / 25
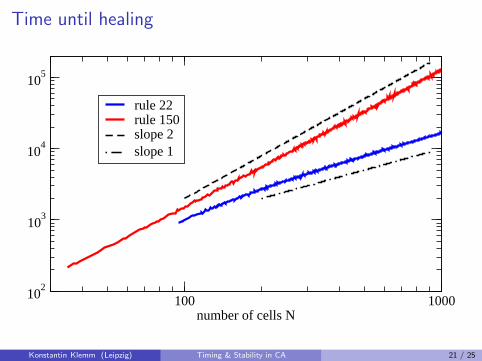
Time until healing
100 1000number of cells N
102
103
104
105
rule 22rule 150slope 2slope 1
Konstantin Klemm (Leipzig) Timing & Stability in CA 21 / 25
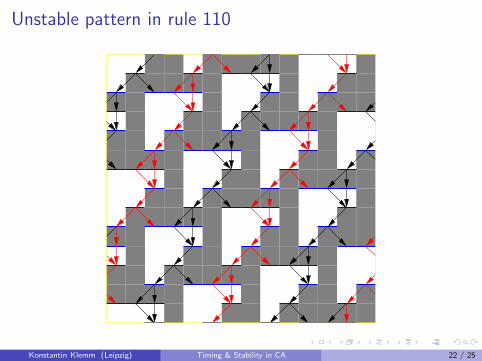
Unstable pattern in rule 110
Konstantin Klemm (Leipzig) Timing & Stability in CA 22 / 25

Overview of results
stable elementary rules0, 4, 22, 32, 36, 54, 72, 76, 104, 128, 132, 160, 164, 200, 204, 218,222, 236, 250,254
partially stable el. rules (strong dependence on n)90, 122, 126, 150
unstable elementary rules50, 94, 108, 110, 178
Elementary CA fail to produce sustained synchronous blinking of allcells
Game of Life: Blinkers, gliders, spaceships etc. are unstable
Konstantin Klemm (Leipzig) Timing & Stability in CA 23 / 25

Further results
Konstantin Klemm (Leipzig) Timing & Stability in CA 24 / 25
Summary
Stable and unstable CA rules can be distinguished by theirresponse to minimal timing perturbations.
Konstantin Klemm (Leipzig) Timing & Stability in CA 25 / 25