the voice operated and wirelessly controlled elevator jeremy hester advisor: mohammad saadeh class:...
TRANSCRIPT

1
The Voice Operated and Wirelessly Controlled
ElevatorJeremy Hester
Advisor: Mohammad Saadeh
Class: ET 493 – 01
Instructor: Dr. Cris Koutsougeras
South Eastern UniversityComputer Engineering Technology

2
The Purpose and the Idea:
Purpose: To build an elevator can accept voice commands wirelessly.
The Idea: To make the usage of an everyday elevator more accommodating in especially cramped situations and less of an ordeal in humility for those physically handicapped.

3
The System◦ Two Microcontroller Boards◦ Two Wireless Modules◦ A Voice Recognition Module and Microphone
The Model◦A Frame◦A Room◦Floor Detection Sensors◦One Geared DC Motor with Encoder
Major Components

4
The Frame

5
Frame: Current Progress

6
The System
Transmitter Side Receiver Side

7
System Logic
Start
System at Rest
Enter Voice Command
Transmitter Sends out
Desired signal
Start
System at Rest
Room Stops at Sensor Detected
Floor
Door Opens and Closes
Voice Transmitter
Device
Elevator Receiver
Move Room Up the Necessary
Predetermined / Calculated Rotations
Yes No
Move Room Down the Necessary
Predetermined / Calculated Rotations
Moves to Home Position
Is Signal greater or less than
current floor
System Receives Signal

8
The Arduino Uno Board X2
One Transmitter
One Receiver
9
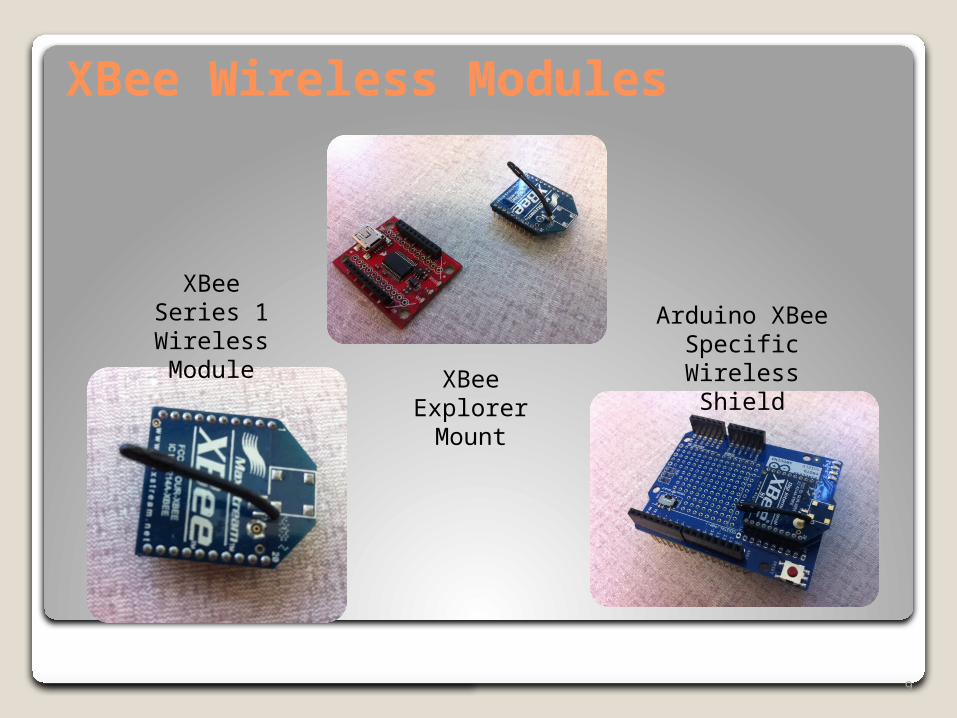
XBee Explorer Mount
XBee Series 1 Wireless
ModuleArduino XBee
Specific Wireless Shield
XBee Wireless Modules

10
The Easy VR Module and Microphone

11
The Motor
GM9236C534 – R2
G30A Planetary Gearbox
Incremental Optical Encoder
Voltage: Up to 30.3 VDCGear Ratio 5.9:1


13
Motor Test Program

14
Immediate Challenges
Determining the exact number of signals received by the motor encoder on different PWM values that would cause the geared motor to spin a full rotation.
Configuring various test programs to calculate and test for acceleration and deceleration distances and times.
Calculating how much torque is required to be able to both move the room up and down, and hold it at fixed position.
Determining how many geared rotations it will take to go from one floor to another from different locations.
Calibrating the system on start up by designating a home position that the system can find automatically.
Building a room of an adequate weight to keep the cable tensioned and the motor running smoothly.
15
Deliverables Build the model (i.e. the Frame and the Room)
Integrate individual systems and modules to build the prototype.
Ensure individual systems can communicate with each others flawlessly.

April 13: Testing of XBee modules: Completed April 20: Construction of Frame: Completed April 21: Gear Motor Selection: Completed April 27: Complete Gear Motor Selection and Begin Testing: Completed May 03 : Testing and Configuring The Easy VR modules: Completed May 08 : Make Adjustments to Final Proposal Draft and Presentation: Completed May 10 : Final Proposal and Presentation: Completed May 20 : Testing of Easy VR modules June 01: Construction of the Room June 10: Door Motor Selection and Testing June 20: Integration of Individual Components June 30: Testing of the System
16
APRIL 13 MAY 13 JUNE 13 JULY 13 AUG 13 SEPT 13 OCT 13 NOV 13
Wireless, EasyVR, Gear motor selection
Integrating individual components into the frame
Final testing and tuning of the system
Timeline