special relativistic effects in orbiting lidar wind measurements
DESCRIPTION
Special Relativistic Effects in Orbiting Lidar Wind Measurements. Neil Ashby Dept. of Physics, University of Colorado Boulder, CO 80309-0390 NIST Affiliate Email: [email protected]. Michael J. Kavaya Langley Research Center, MC 468 Hampton, VA 23641-2199 - PowerPoint PPT PresentationTRANSCRIPT

Special Relativistic Effects in Orbiting Lidar Wind Measurements
Neil AshbyDept. of Physics, University of Colorado
Boulder, CO 80309-0390NIST Affiliate
Email: [email protected]
Michael J. KavayaLangley Research Center, MC 468
Hampton, VA 23641-2199Email: [email protected]
Constancy of c, speed of light
Postulate II of Special Relativity:
In any inertial frame the speed of light, c, is a constant independent of the motion of the source (or of the observer.)
c=299792458 m/s (defined)
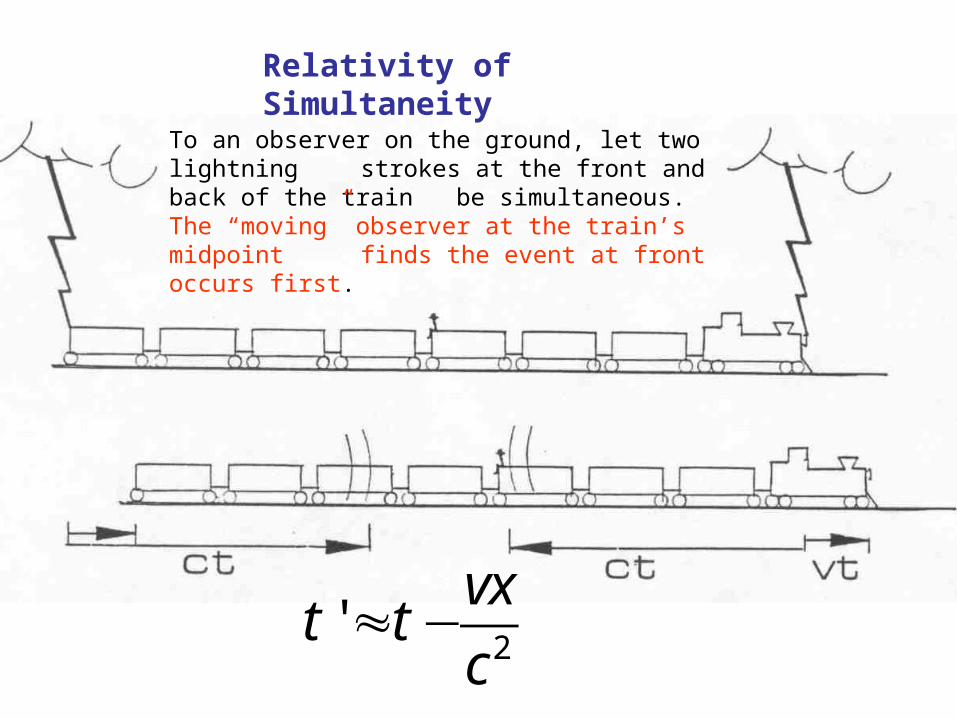
Relativity of Simultaneity
To an observer on the ground, let two lightning strokes at the front and back of the train be simultaneous.
The “moving” observer at the train’s midpoint finds the event at front occurs first.
2'
vxt t
c≈ −
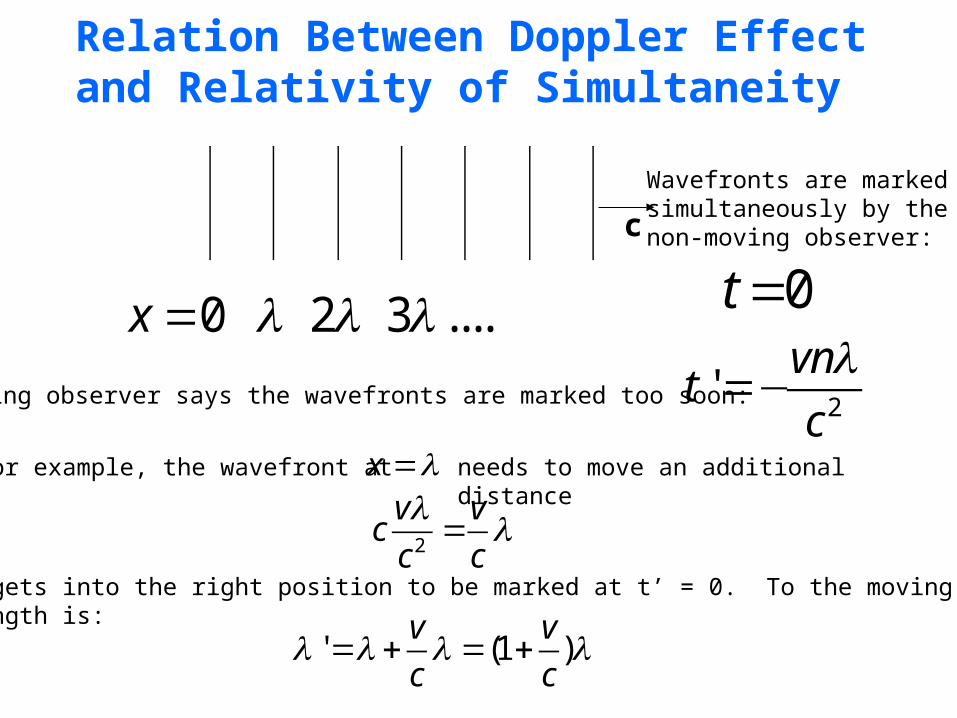
Relation Between Doppler Effect and Relativity of Simultaneity
0 2 3 ....x λ λ λ=
2'
vnt
c
λ=−
0t=
Wavefronts are markedsimultaneously by the non-moving observer:
Moving observer says the wavefronts are marked too soon:
c
For example, the wavefront at x λ= needs to move an additional distance
before it gets into the right position to be marked at t’ = 0. To the moving observer,the wavelength is:
2
v vcc c
λ λ=
' (1 )v v
c cλ λ λ λ= + = +
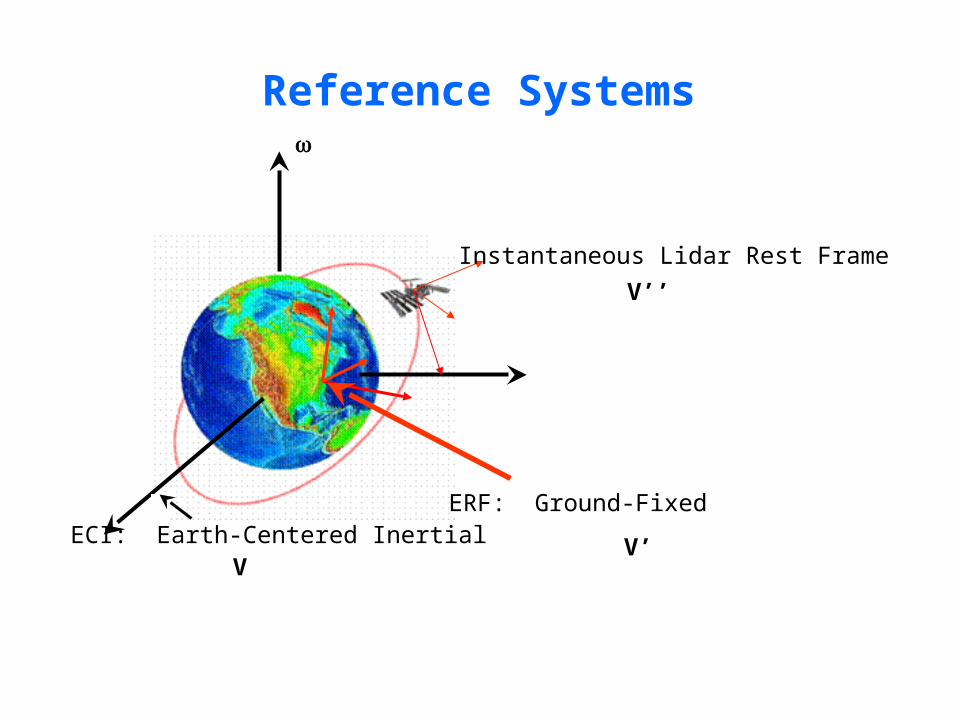
Reference Systems
ECI: Earth-Centered InertialERF: Ground-Fixed
Instantaneous Lidar Rest Frame
VV’
V’’
Notation
Example: , velocity of a point on theground.ù ? r
Unprimed quantities: measured in ECI (Earth-Centered Inertial) frame
Primes on a quantity indicates it is measured in the rest frame ofthe ground point: e.g. w’, the desired wind velocity.
Doubly primed quantities are measured in the rest frame of thelidar apparatus; transmitter and detector are assumed to coincide.
Example: w", the wind velocity relative to the lidar.
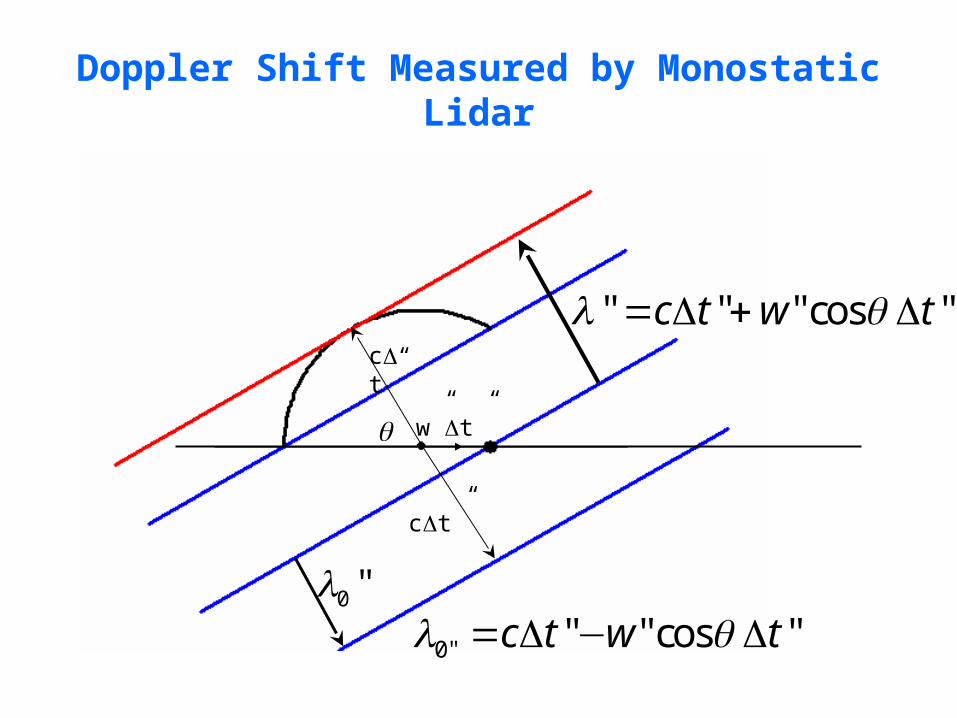
Doppler Shift Measured by Monostatic Lidar
" " "cos "c t w tλ θ= Δ + Δ
" " "cos "c t w tλ θ= Δ + Δ
w”Δt”
cΔt”
cΔt”
" " "cos "c t w tλ θ= Δ + Δ
0" " "cos "c t w tλ θ= Δ − Δ
θ
0 "λ
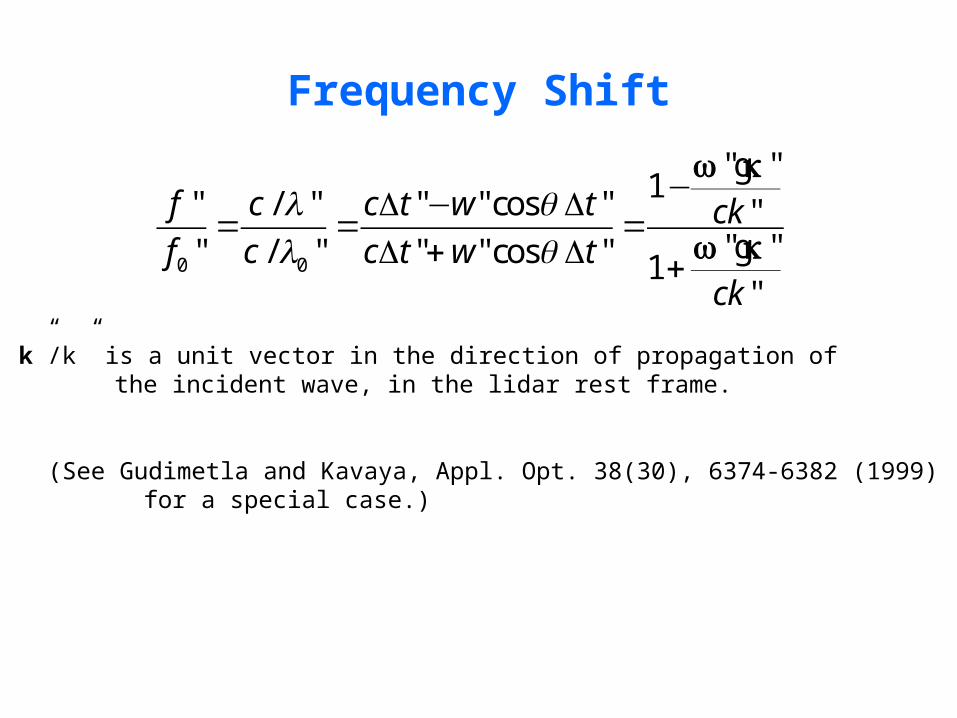
Frequency Shift
k”/k” is a unit vector in the direction of propagation of the incident wave, in the lidar rest frame.
(See Gudimetla and Kavaya, Appl. Opt. 38(30), 6374-6382 (1999)for a special case.)

Fundamental Expression for w”
0 0
" "1
" "
f f
f f
Δ= +
Introduce the fractional frequency shift:
Then solve for w”:2
0
0 0
0
1 "2 " 1 " 1 "
...1 "" 2 " 2 "12 "
ff f ffck f ff
Δ⎛ ⎞ ⎛ ⎞Δ Δ
=− ≅− + +⎜ ⎟ ⎜ ⎟Δ ⎝ ⎠ ⎝ ⎠+
w" k"g
0
0
0 0
1 " ""2 " 2
1 " 1 "" 1 12 " 2 "
fc ff
f fkf f
λΔΔ
=− =−Δ Δ+ +
w" k"g
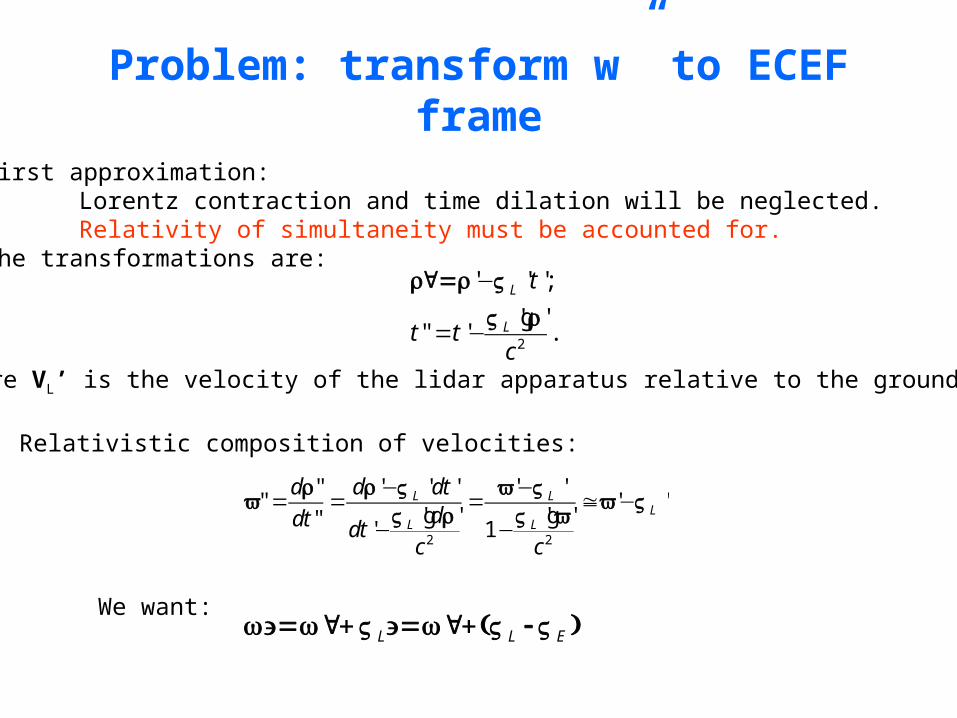
Problem: transform w” to ECEF frame
2
' ' ';
' '" ' .
L
L
t
t tc
−
= −
r" =r V
V rg
2 2
' ' ' ' '"" ' '
' ' ' '" ' 1
L LL
L L
d dtdddt dtc c
− −= = = ≅ −
− −
r V v Vrv v V
V r V vg g
First approximation:Lorentz contraction and time dilation will be neglected. Relativity of simultaneity must be accounted for.
The transformations are:
Relativistic composition of velocities:
where VL’ is the velocity of the lidar apparatus relative to the ground.
We want:L L E+ +w'=w" V '=w" (V -V )
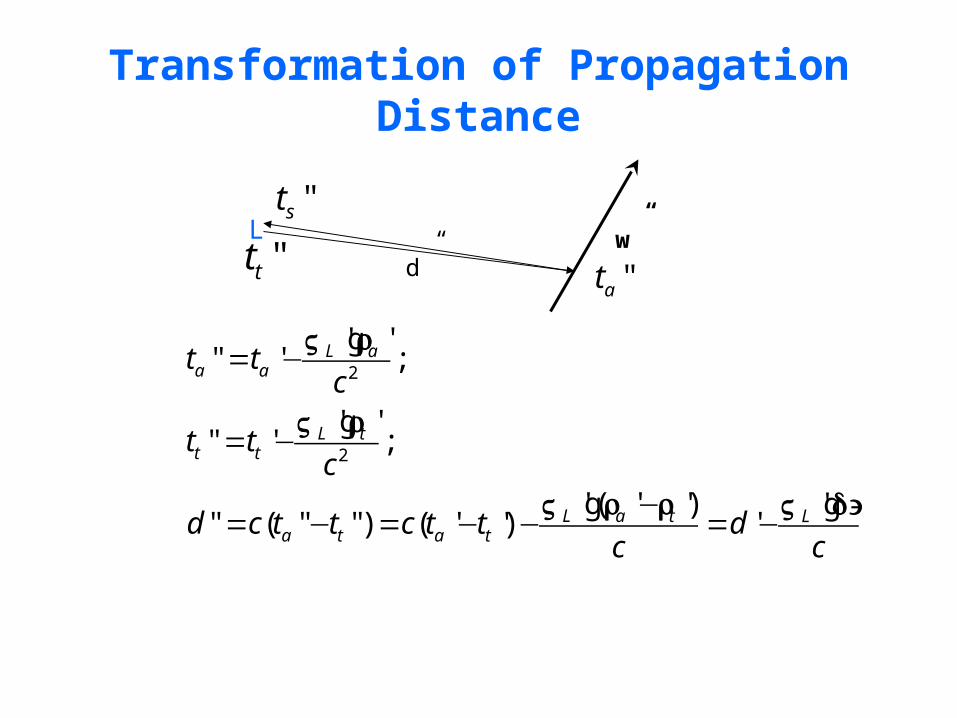
Transformation of Propagation Distance
"tt "at
"stw”L
d”
2
2
' '" ' ;
' '" ' ;
' ( ' ') '" ( " ") ( ' ') '
L aa a
L tt t
L a t La t a t
t tc
t tc
d c t t c t t dc c
= −
= −
−= − = − − = −
V r
V r
V r r V d'
g
g
g g
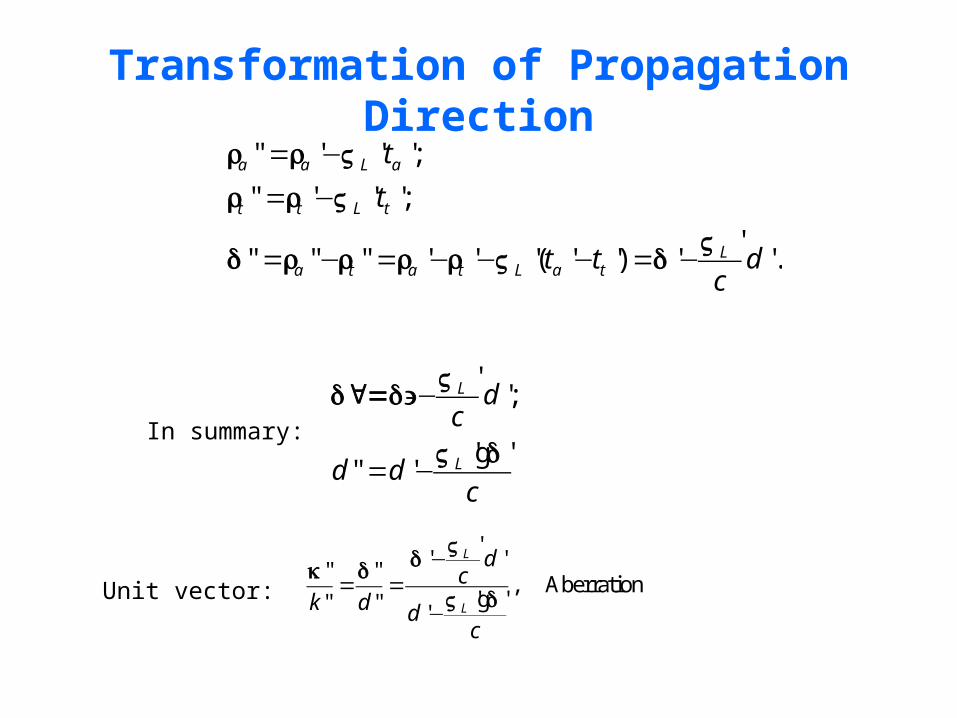
Transformation of Propagation Direction" ' ' ';
" ' ' ';
'" " " ' ' '( ' ') ' '.
a a L a
t t L t
La t a t L a t
t
t
t t dc
= −= −
= − = − − − = −
r r V
r r V
Vd r r r r V d
'';
' '" '
L
L
dc
d dc
−
= −
Vd" =d'
V dgIn summary:
Unit vector:
'' '" "
, Aberration' '" " '
L
L
dc
k d dc
−= =
−
Vdk d
V dg
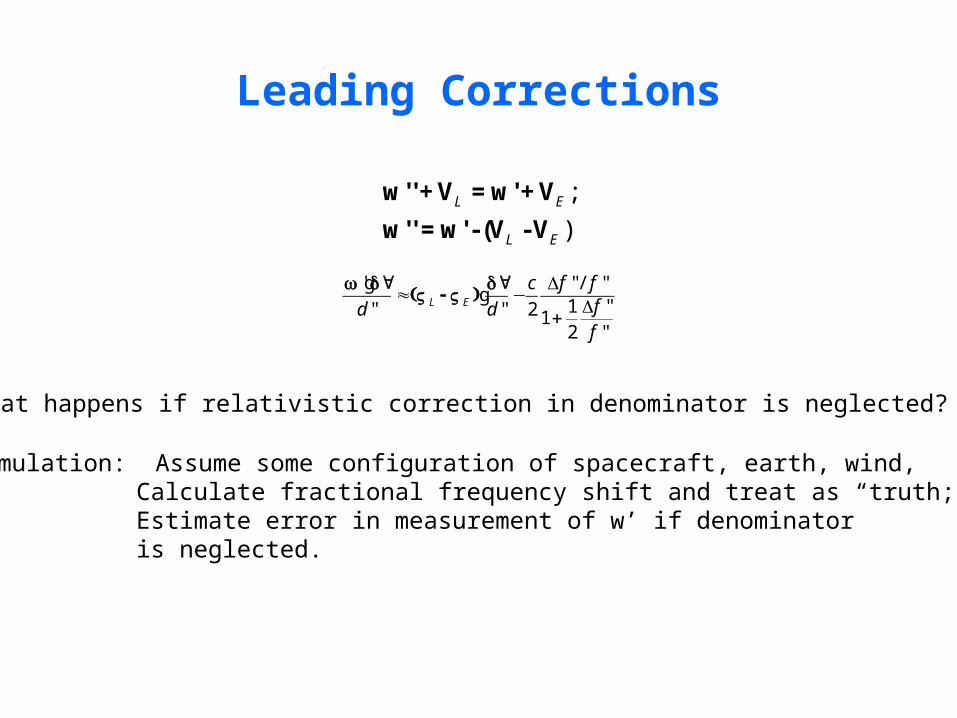
Leading Corrections
;
)L E
L E
w'' + V = w' + V
w'' = w'- (V - V
' "/ "1 "" " 2 12 "
L E
c f ffd df
Δ≈ − Δ+
w d" d"(V -V )
gg
What happens if relativistic correction in denominator is neglected?
Simulation: Assume some configuration of spacecraft, earth, wind, Calculate fractional frequency shift and treat as “truth;” Estimate error in measurement of w’ if denominator is neglected.
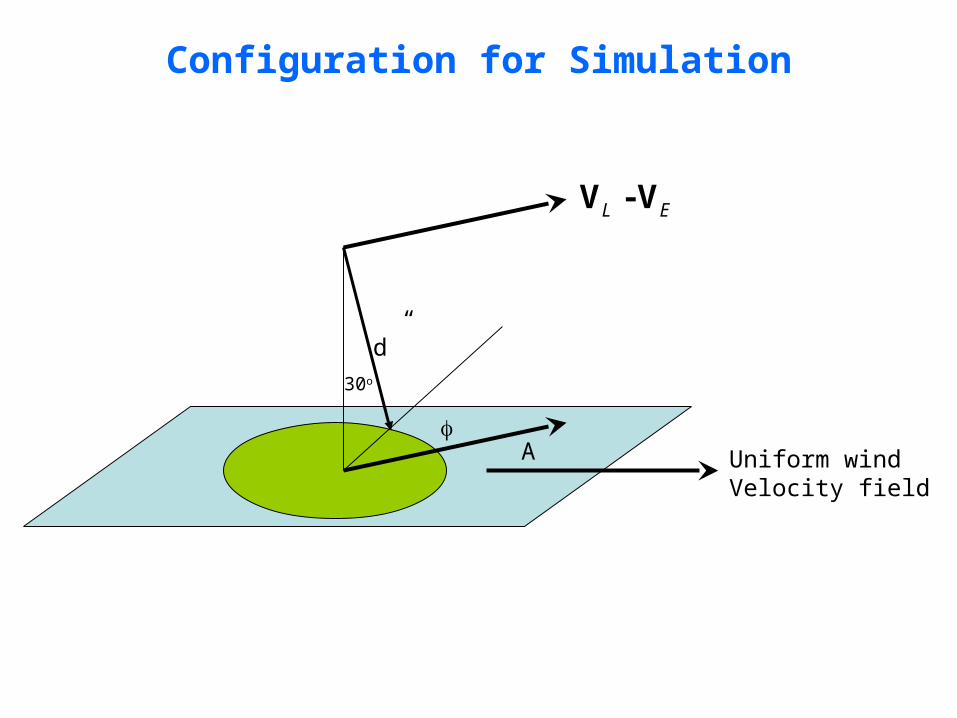
Configuration for Simulation
Uniform windVelocity field
L EV - V
d”
30o
A
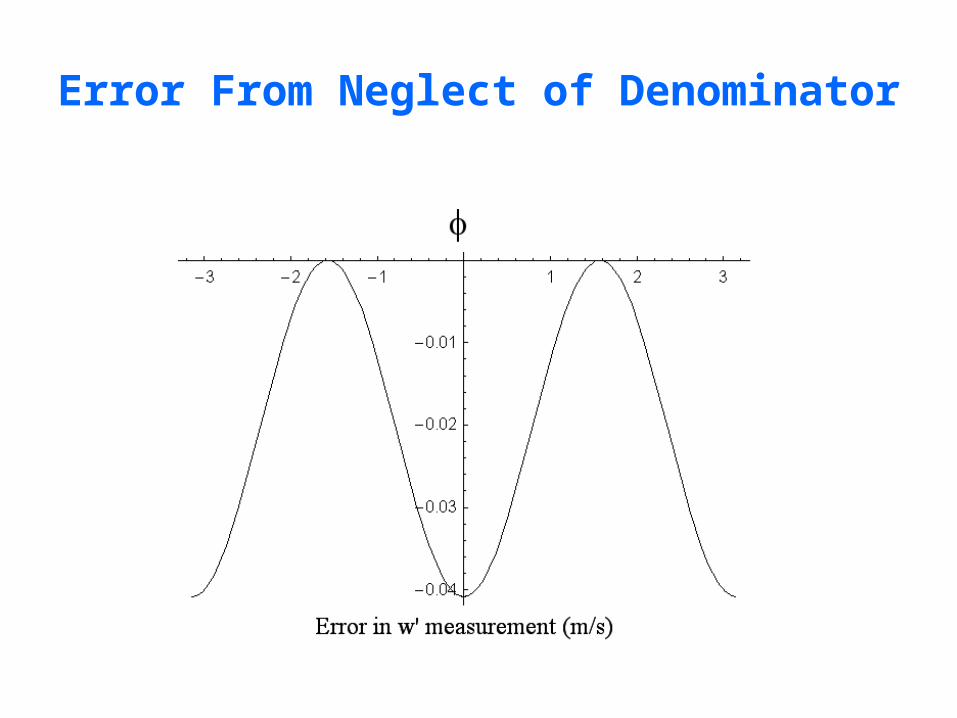
Error From Neglect of Denominator
Using ECI Frame for Light Path
" ;
;
);
L
L
L E
d dc
dc
= −
−
V d
Vd" =d-
w" =w' - (V V
g
( )"/ "1 "2 12 "
L LL E
L L
d dc f fc c
fd d
c c f
⎛ ⎞ ⎛ ⎞−⎜ ⎟ ⎜ ⎟ Δ⎝ ⎠ ⎝ ⎠= − Δ− − +
V Vw' d - V V d -
V d V d
g g
g g
The relativistic corrections on the right-hand side are:
2) L L
L E
d
c d c⎛ ⎞− −⎜ ⎟⎝ ⎠
V V d(V V
gg
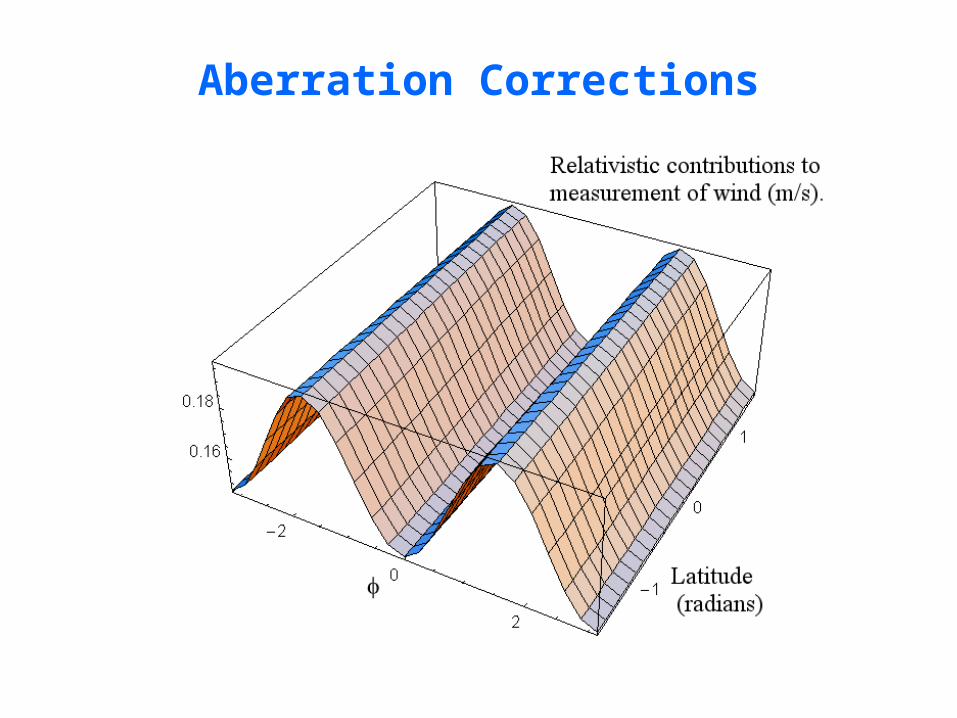
Aberration Corrections
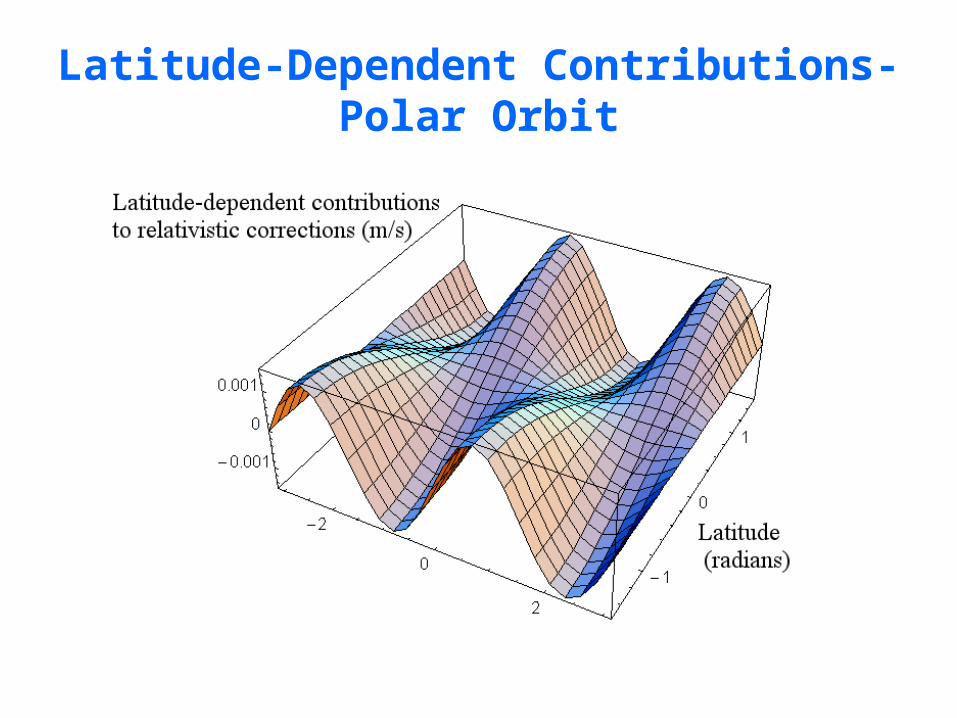
Latitude-Dependent Contributions-Polar Orbit
Spacecraft Velocity Changes
During propagation of the lidar pulse, the spacecraft falls in the gravitationalfield of the earth. This is analyzed most easily in the ECI frame, but then the directions of the incident and scattered ray are different.
L
unit vector of transmitted ray in the ECI frame;
unit vector of scattered ray in the ECI frame;
time of transmission;
time of detection;
( ) lidar velocity at time .
t
s
t
s
t
t
t t
=
=
=
=
=
N
N
V
Frequency Shift for Accelerated Spacecraft
( )( )
( )( )0
1 / 1 ( ) /"
" 1 / 1 ( ) /t s L s
s t L t
c t cf
f c t c
− −
− −
N w N V
N w N V
g g;
g g
It can be shown, neglecting second-order Doppler shifts, that:
Assuming that Ns=-Nt, and that w=w’+VE,gives
1..... ( )
2t t s tt t= + −w' N N gg g
This increases with increasing altitude even though the acceleration of gravitydecreases.
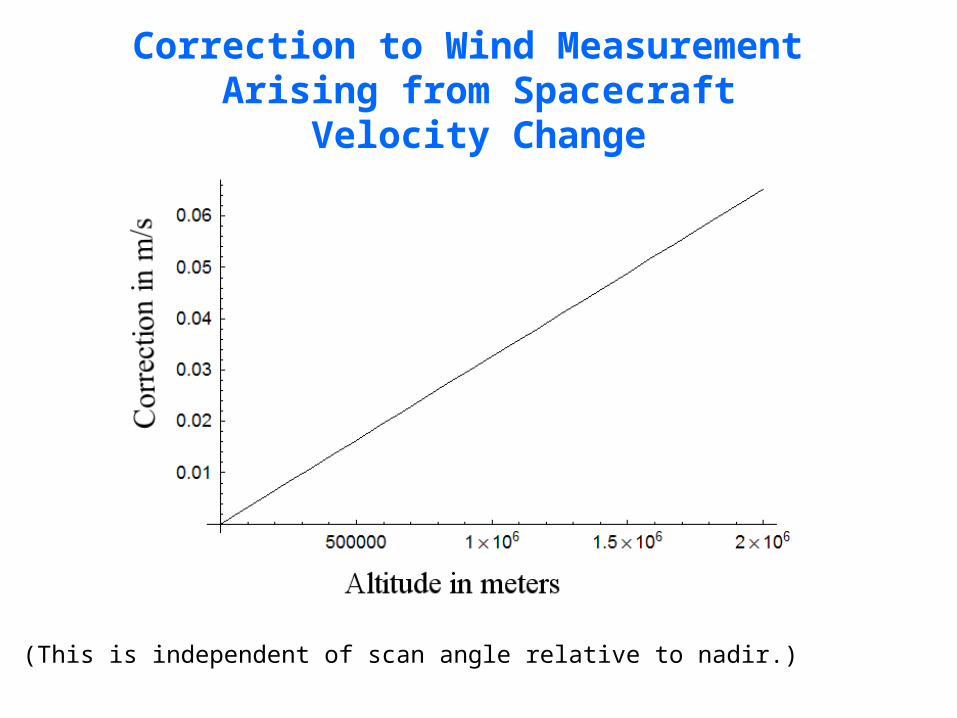
Correction to Wind Measurement Arising from Spacecraft
Velocity Change
(This is independent of scan angle relative to nadir.)
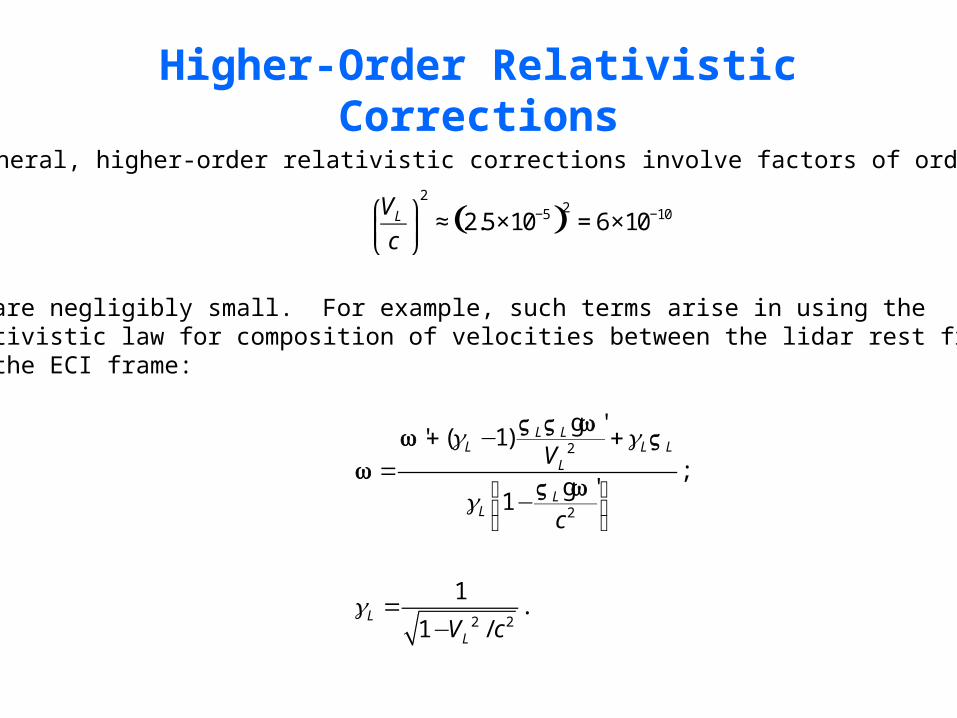
Higher-Order Relativistic Corrections
( )2
25 102.5 10 6 10LV
c− −⎛ ⎞ ≈ × = ×⎜ ⎟
⎝ ⎠
In general, higher-order relativistic corrections involve factors of order
and are negligibly small. For example, such terms arise in using the relativistic law for composition of velocities between the lidar rest frameand the ECI frame:
2
2
2 2
'' ( 1)
;'
1
1.
1 /
L LL L L
L
LL
L
L
V
c
V c
γ γ
γ
γ
+ − +=
⎛ ⎞−⎜ ⎟⎝ ⎠
=−
V V ww V
wV w
g
g
Summary
• Change of direction of light path (aberration) contributes relativistic corrections which can be as much as 0.18 m/s. Such corrections depend in a complicated way on spacecraft, surface, and wind velocities and on scanning direction. Principal corrections arise from apparent change in direction of the light path when tranforming from one reference frame to another.
• Spacecraft velocity changes arising from free fall can contribute as much as 0.04 m/s to errors in wind velocity measurements.
• Neglect of higher-order terms in the fractional frequency shift can contribute errors of up to 0.04 m/s.
• High-order relativistic corrections have been worked out in detail but are probably negligible.