sistemi za regulaciju dinamike, stabilnosti i...
TRANSCRIPT
• Prva grupa sistema: bazirani na elementima i dejstvu kočnog sistema• U hardverskom smislu jedan sistem, više softverski realizovanih funkcija
funkcija• Princip: upravljanje radnim pritiskom u izvršnim organima pojedinih
točkova (modulacija), u funkciji upravljanja kočnim momentom, radi ostvarenja odgovarajuće uzdužne sile na točku
• Obuhvata funkcije:
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Sistemi za regulaciju dinamike, stabilnosti i upravljivosti vozila
Dr Boris Stojić, 2018
• Obuhvata funkcije:• ABS: sistem za sprečavanje blokiranja kočenog točka i srodne pomoćne
funkcije• ASR: sistem za sprečavanje proklizavanja pogonskog točka (u sadejstvu
sa upravljanjem pogonskim sistemom)• ESP: sistem za poboljšanje upravljivosti odnosno povećanje stabilnosti
bočne dinamike vozila u kritičnim manevrima• Ostalo: sistemi asistencije vozaču (pojačavač sile kočenja, polazak na
uzbrdici...)
Anti-Blocking System, Anti-Slip Regulation, Electronic Stability Programme - opšte prihvaćeni nazivi/skraćenice, u upotrebi i drugačije formulacije
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
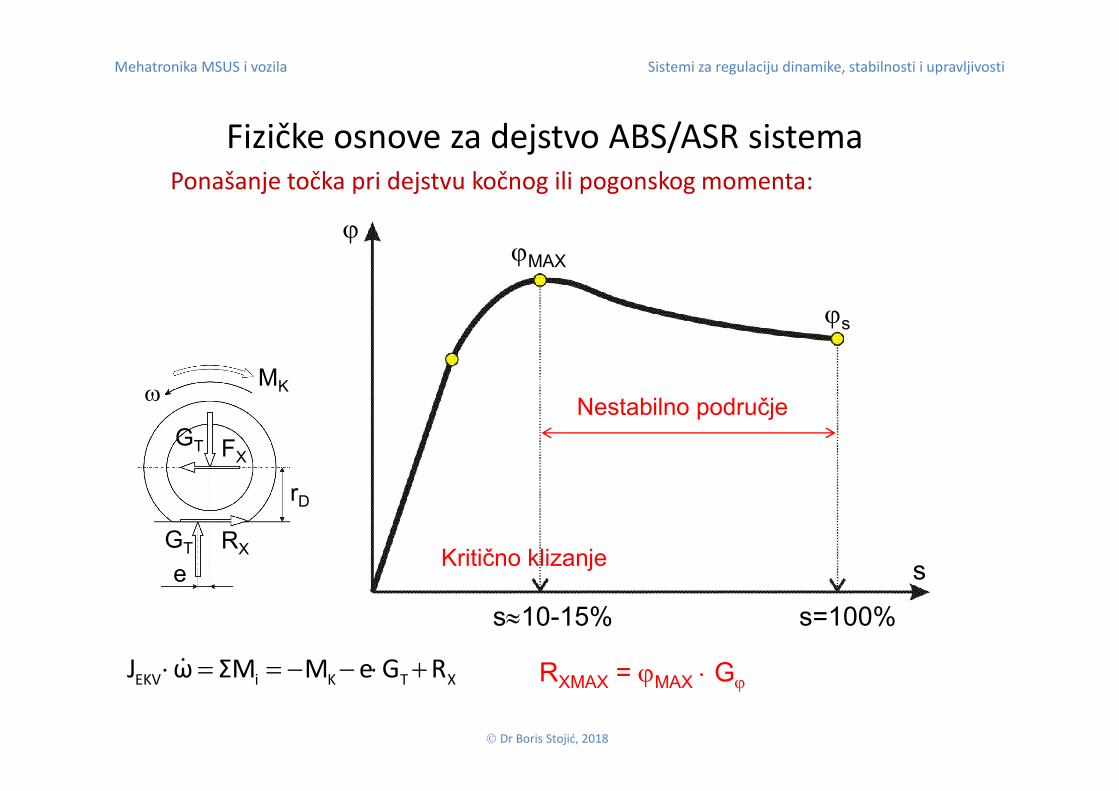
Fizičke osnove za dejstvo ABS/ASR sistemaPonašanje točka pri dejstvu kočnog ili pogonskog momenta:
• Pojava uzdužnog klizanja• Klizanje: mera odstupanja teorijske (vT = rDT) od stvarne (v) brzine kretanja
vozila; poreklo: deformaciono klizanje + delimično ili potpuno proklizavanje kontaktne površine pneumatika
• Koeficijent prijanjanja (odnos uzdužne i vertikalne sile na točku) se menja sa intenzitetom klizanja s: = MAX s 1015% (približno: početak potpunog proklizavanja kontaktne površine)
Dr Boris Stojić, 2018
proklizavanja kontaktne površine)
Dinamika kočenog točka (sledeći slajd):
• Točak usporava, • U stabilnom delu dijagrama (s), porast kočnog momenta MK dovodi do porasta
intenziteta tangencijalne reakcije točka RX
• Porast RX se po smeru delovanja suprotstavlja porastu• Nakon porasta klizanja s iznad kritične vrednosti, dolazi do pada intenziteta RX;
dolazi do naglog porasta intenziteta ugaonog usporenja točka, što ubrzava dalji porast klizanja s a time dovodi do još većeg pada sile RX; povratna sprega dovodi do gotovo trenutnog blokiranja točka.
0ω
ω
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Ponašanje točka pri dejstvu kočnog ili pogonskog momenta:
MAX
s
Nestabilno područje
Fizičke osnove za dejstvo ABS/ASR sistema
MK
Dr Boris Stojić, 2018
s
s=100%s10-15%
RXMAX = MAX G
Nestabilno područje
FXGT
rD
e
RXGT
XTKiEKV RGeMΣMωJ
Kritično klizanje

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
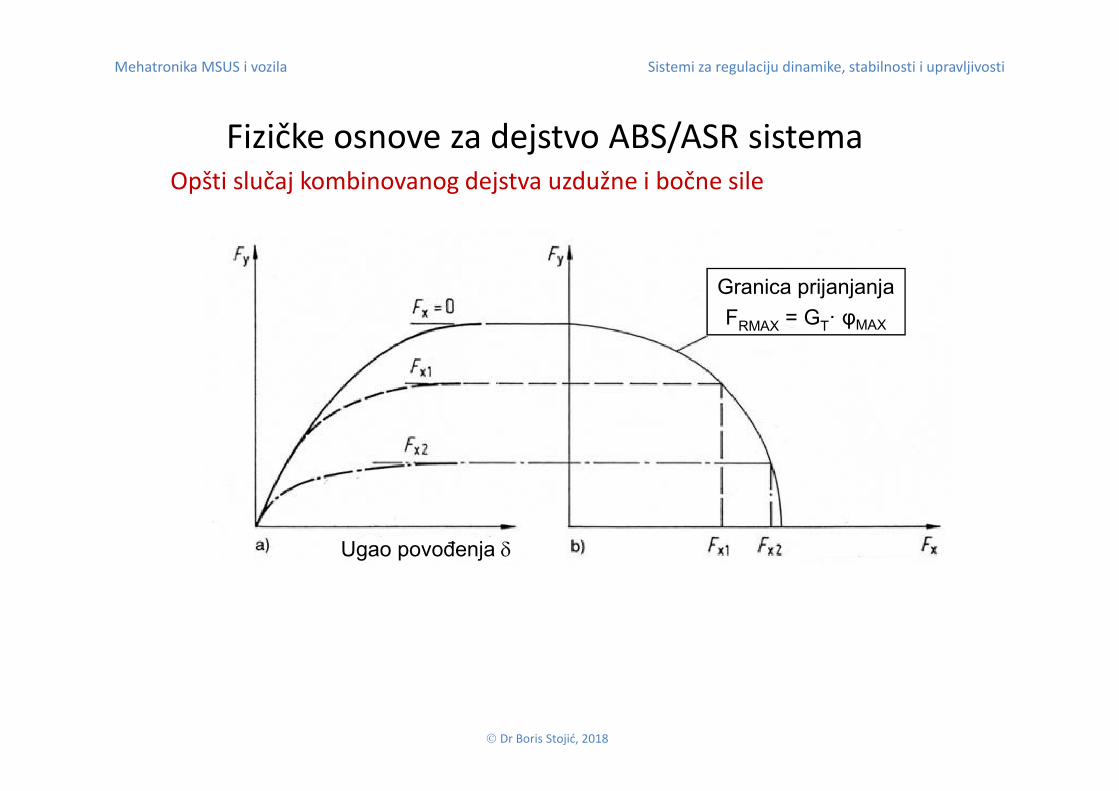
Granično iskorišćenje prijanjanja pri kombinovanom dejstvu uzdužne i bočne sile
YXR FFF
FR2 = FX
2 + FY2
FX2 + FY
2 = (GT· φMAX)2 = const jednačina kružnice
FRMAX = GT· φMAX
Fizičke osnove za dejstvo ABS/ASR sistema
Dr Boris Stojić, 2018
FX
FY
FR Što je veće FX, manje prijanjanja ostaje za realizaciju FY, i obrnuto!
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Opšti slučaj kombinovanog dejstva uzdužne i bočne sile
Granica prijanjanja
FRMAX = GT· φMAX
Fizičke osnove za dejstvo ABS/ASR sistema
Dr Boris Stojić, 2018
Ugao povođenja
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
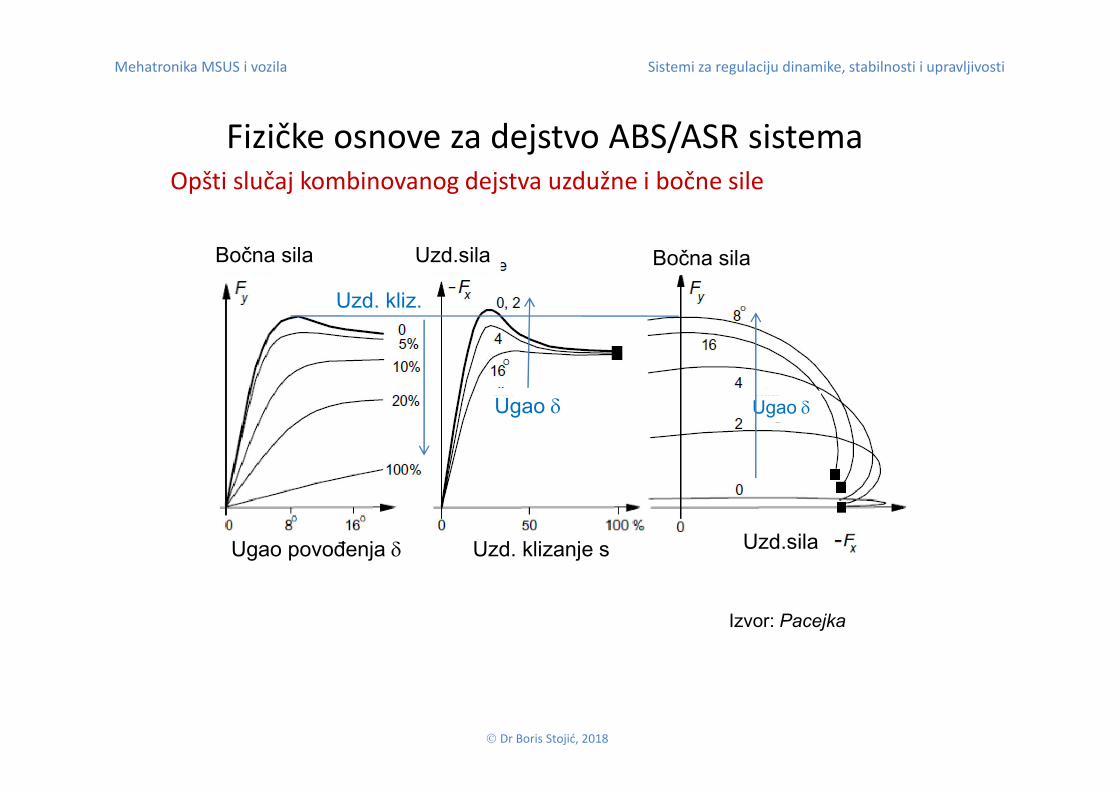
Opšti slučaj kombinovanog dejstva uzdužne i bočne sile
Bočna sila Uzd.sila Bočna sila
Ugao
Uzd. kliz.
Fizičke osnove za dejstvo ABS/ASR sistema
Dr Boris Stojić, 2018
Izvor: Pacejka
Ugao povođenja Uzd. klizanje s Uzd.sila
Ugao Ugao

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Opšti slučaj kombinovanog dejstva uzdužne i bočne sile
Izvor: Bosch
Fizičke osnove za dejstvo ABS/ASR sistema
Dr Boris Stojić, 2018

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Važna svojstva kombinovanog dejstva uzdužne i bočne sile :
• U odsustvu uzdužne sile (slobodan točak) može da se realizuje najveća bočna sila
• Pri optimalnom uzdužnom klizanju ( = MAX) uzdužna sila je maksimalna, pri čemu još postoji značajna rezerva prijanjanja za realizaciju bočne sile
• Pri blokiranom točku, uzdužna sila je manja od fizički moguće (S < MAX), posebno nepovoljno: moguća bočna sila je neznatna (tj. c → 0)!
Fizičke osnove za dejstvo ABS/ASR sistema
Dr Boris Stojić, 2018
g
aK
R
lθ
y
C
δZ
Z
δP
P
c
G
c
GK
Podsetnik: K – GRADIJENT PODUPRAVLJIVOSTI
- potreban ugao zakretanja upravljačkog točka
c - koeficijent bočne krutosti pneumatika
l – osovinsko rastojanje vozila
RC – radijus krivine
GP, GZ – osovinske reakcije

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Uticaj gubitka bočne sile usled blokiranja točkova na upravljivost i stabilnost vozila u bočnom pravcu:
Blokiranje prednjihtočkova GUBITAK
Blokiranje zadnjihtočkova GUBITAK STABILNOSTI
SPREG
Fizičke osnove za dejstvo ABS/ASR sistema
Dr Boris Stojić, 2018
K
2
R
vm točkova GUBITAK UPRAVLJIVOSTI
SPREG
Odgovarajuća bočnareakcija na obe osovine UPRAVLJIVO I STABILNO VOZILO
K →
K → -

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Fizičke osnove za dejstvo ESP sistema
ZYZPYPTZTZ FcosFMωJ ll
Jednačine kretanja vozila:Komentar: MT FYP - sa pozitivnim predznakom - izaziva porast Z upravljačko dejstvo; FYZ - sa negativnim predznakom, suprotstavlja se porastu Z stabilizujuće dejstvo
YZYP
K
2
N FcosθFR
v
g
Gam
Dr Boris Stojić, 2018
KRg
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Fizičke osnove za dejstvo ESP sistema
ZYZPYPTZTZ FcosFMωJ ll YZYP
K
2
N FcosθFR
v
g
Gam
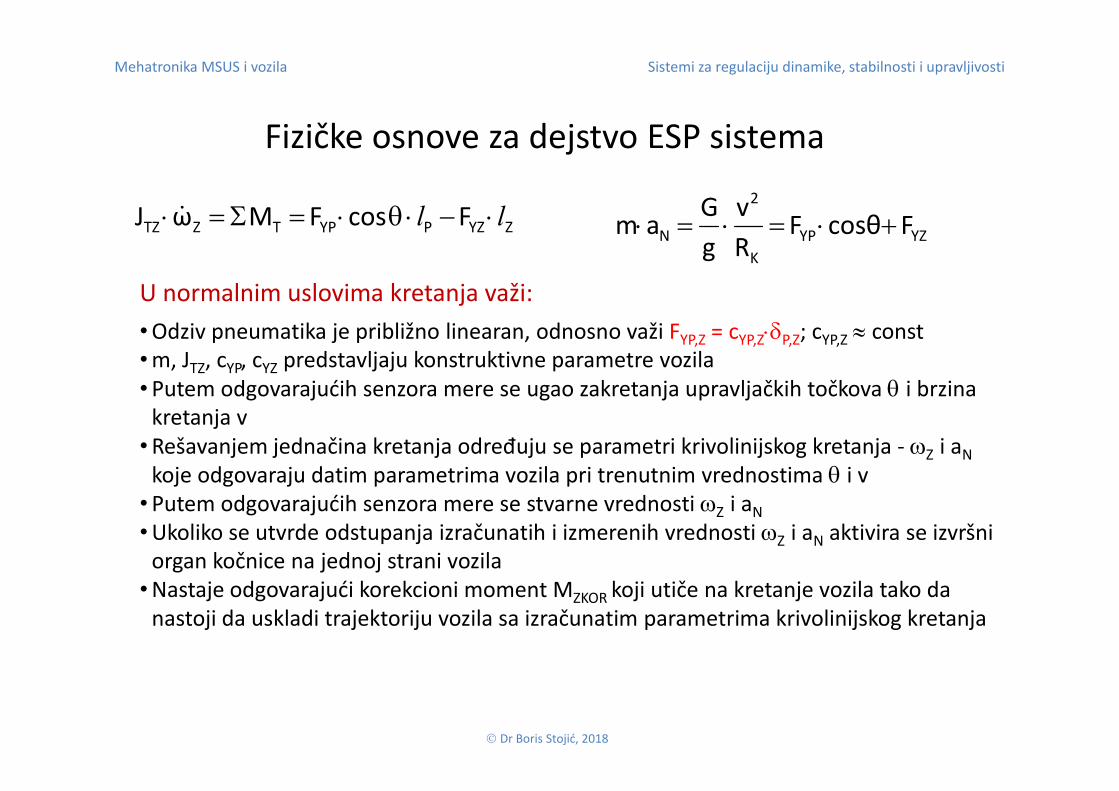
U normalnim uslovima kretanja važi:
• Odziv pneumatika je približno linearan, odnosno važi FYP,Z = cYP,ZP,Z; cYP,Z const• m, JTZ, cYP, cYZ predstavljaju konstruktivne parametre vozila• Putem odgovarajućih senzora mere se ugao zakretanja upravljačkih točkova i brzina
Dr Boris Stojić, 2018
• Putem odgovarajućih senzora mere se ugao zakretanja upravljačkih točkova i brzina kretanja v
• Rešavanjem jednačina kretanja određuju se parametri krivolinijskog kretanja - Z i aN
koje odgovaraju datim parametrima vozila pri trenutnim vrednostima i v• Putem odgovarajućih senzora mere se stvarne vrednosti Z i aN
• Ukoliko se utvrde odstupanja izračunatih i izmerenih vrednosti Z i aN aktivira se izvršni organ kočnice na jednoj strani vozila
• Nastaje odgovarajući korekcioni moment MZKOR koji utiče na kretanje vozila tako da nastoji da uskladi trajektoriju vozila sa izračunatim parametrima krivolinijskog kretanja

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Fizičke osnove za dejstvo ESP sistema
ZKORZYZPYPZTZ MFcosFωJ ll
• Jednačina kretanja postaje:
• MZKOR = FKORb/2 - korekcioni moment u odnosu na težište vozila T
• b/2 - polovina širine traga točkova
Dr Boris Stojić, 2018
b/2 - polovina širine traga točkova• FKOR - rezultujuća uzdužna sila dobijena
na osnovu kočnog momenta saopštenog točku, čija potrebna veličina se određuje u okviru upravljačke jedinice
Tipičan primer kritičnog manevra u praksi: "Lift-off Oversteer"
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
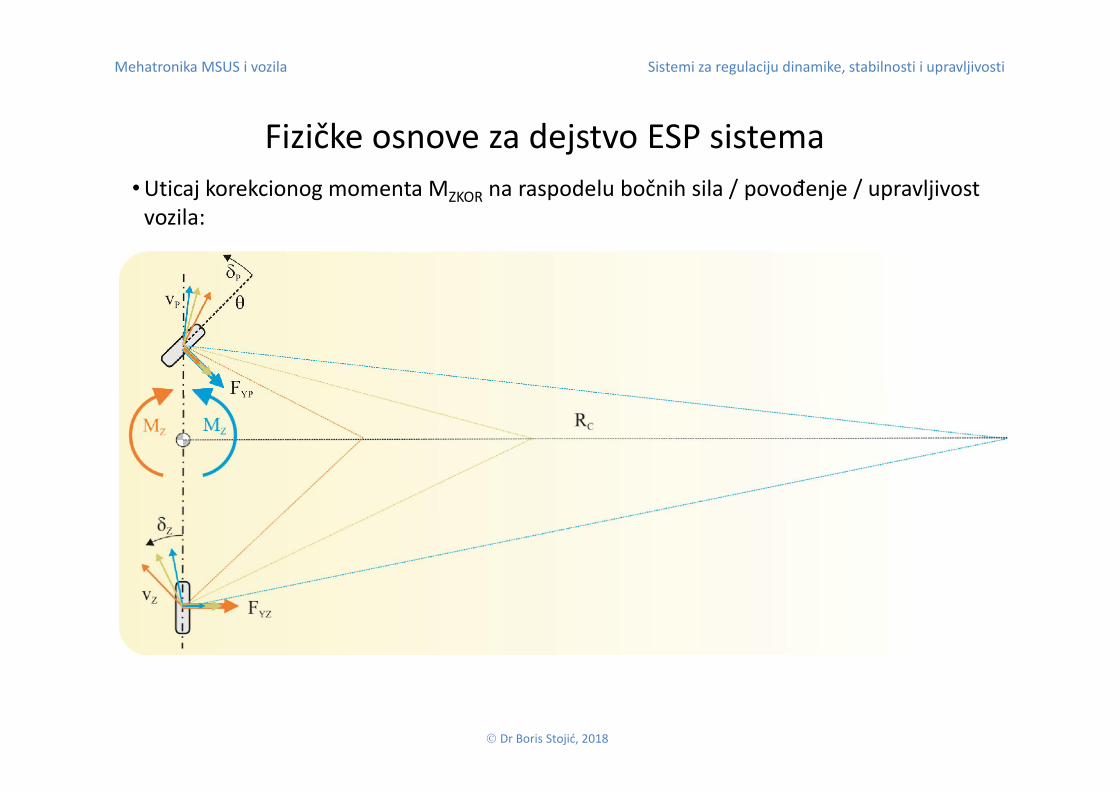
Fizičke osnove za dejstvo ESP sistema
• Uticaj korekcionog momenta MZKOR na raspodelu bočnih sila / povođenje / upravljivost vozila:
Dr Boris Stojić, 2018

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Fizičke osnove za dejstvo ESP sistema
• Uticaj korekcionog momenta MZKOR na raspodelu bočnih sila / povođenje / upravljivost vozila:
Dr Boris Stojić, 2018

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Fizičke osnove za dejstvo ESP sistema
Dr Boris Stojić, 2018
Izvor: SSP204

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Osnovne karakteristike sistemaPrincip rada:
• Održavanje klizanja točka u optimalnim granicama (ABS i ASR) odnosno generisanje odgovarajuće tangencijalne reakcije točka (ESP)
MK
FXGT
ωJeM
T
X
G
R MAX
S < MAX
Optimalno
Dr Boris Stojić, 2018
rD
e
RXGTD
EKVT
DD
KX
r
ωJG
r
e
r
MR
s
Optimalno klizanje
• Kočni moment MK je proporcionalan pritisku pK u radnom organu - cilindru kočnice• Putem modulacije pritiska pK vrši se upravljanje momentom MK radi ostvarivanja
optimalnog s odnosno RX
• Modulacija pritiska pK - kod ABS u sadejstvu sa komandom vozača na pedalu kočnice, kod ASR/ESP autonomno
• Modulacija pK neophodna pumpa, solenoidni ventili

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Osnovne karakteristike sistema
Konfiguracija sistema i pojedine komponente
Sa Haldex sp.
Dr Boris Stojić, 2018
Izvor: SSP204
Primer: VW/Audi - Bosch
Integracija
Potrebno samo za ESP
1 ili 2 kom.
Aktivniservo

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Osnovne karakteristike sistemaPrimer konfiguracije sistema
Dr Boris Stojić, 2018

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Osnovne karakteristike sistemaPrimer konfiguracije sistema
Dr Boris Stojić, 2018
Izvor: Bosch
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Osnovne karakteristike sistemaPrimer konfiguracije sistema
Dr Boris Stojić, 2018
Izvor: Bosch/Trautmann
Primer: Bosch integrisane komponente

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Komponente sistema - primeriSenzor broja obrtaja točka i nazubljeni prstenovi
Dr Boris Stojić, 2018
Integracija komponenata
Golf IV nazad
Golf IV napred
Pasivni i aktivni senzori

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Komponente sistema - primeriSenzor broja obrtaja točka i nazubljeni prstenovi
Dr Boris Stojić, 2018
Izvor: Bosch

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Komponente sistema - primeriSenzor broja obrtaja točka i nazubljeni prstenovi
Dr Boris Stojić, 2018
Izvor problema: korozija i oštećenja
Zamenjen nazubljeni prsten

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Komponente sistema - primeriUpravljačka jedinica i hidraulički modul
Izvor: Bosch
Dr Boris Stojić, 2018

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Komponente sistema - primeriSenzor ugla volana
Izvor: Youtube -autorepairtutorials
Dr Boris Stojić, 2018
autorepairtutorials Izvor: Bosch
Izvor: motor-talk.de

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Dejstvo ABS sistemaPrincip modulacije pritiska
Dr Boris Stojić, 2018
Izvor: Trautmann
1 – ulazni ventil
2 – izlazni ventil
12
34
3 – povratna pumpa
4 – akumulator pritiska (za brzo rasterećenje)
Koriste se 2/2 elektromagnetni ventili.
Par ventila za svaki izvršni organ (kočni cilindar / čeljust)

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Dejstvo ABS sistemaPrincip modulacije pritiska
Funkcije:
1. Pritisak na osnovu komande vozača: ventili 1 i 2 isključeni, 1 otvoren, 2 zatvoren, pumpa neaktivna
Dr Boris Stojić, 2018
Izvor: Trautmann
12
34
neaktivna
2. Držanje dostignutog pritiska na konstantnom nivou: ventil 1 uključen, ventil 2 isključen, oba zatvorena, pumpa neaktivna
3. Snižavanje pritiska: ventili 1 i 2 uključeni, 1 zatvoren, 2 otvoren, pumpa vraća kočnu tečnost u cilindar, povratni hod pedale

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Dejstvo ABS sistemaPrimer radnog ciklusa na podlozi sa dobrim prijanjanjem
Brzina
Tangencijalno
vV
vT
vV – brzina vozilavT – obimna /ugaona brzina točkaaT – obimno /ugaono ubrzanje točka vRef – referentna1 – normirano klizanje
Početak kočenja
Dr Boris Stojić, 2018
Tangencijalno /ugaono
ubrzanje točka
Pritisak u izvršnom organu kočnice
1 – normirano klizanje
vRef i 1 – izračunavaju se na osnovu signala senzora i programirane upravljačke logike
+A, +a, –a - predefinisane granične vrednosti ubrzanja/usporenja točka
Početak kočenja
aT
Izvor: Bosch, Trautmann
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
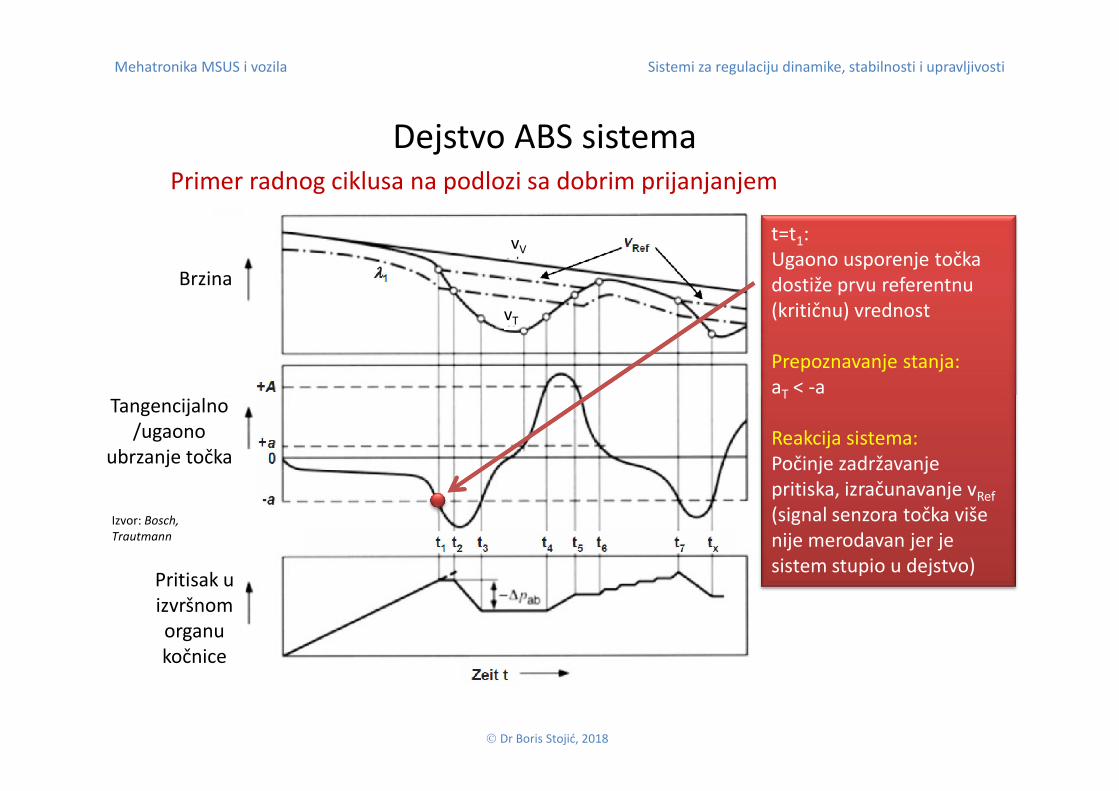
Dejstvo ABS sistemaPrimer radnog ciklusa na podlozi sa dobrim prijanjanjem
Brzina
Tangencijalno
vV
vT
t=t1:Ugaono usporenje točka dostiže prvu referentnu (kritičnu) vrednost
Prepoznavanje stanja:aT < -a
Dr Boris Stojić, 2018
Tangencijalno /ugaono
ubrzanje točka
Pritisak u izvršnom organu kočnice
aT < -a
Reakcija sistema:Počinje zadržavanje pritiska, izračunavanje vRef
(signal senzora točka više nije merodavan jer je sistem stupio u dejstvo)
Izvor: Bosch, Trautmann

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Dejstvo ABS sistemaPrimer radnog ciklusa na podlozi sa dobrim prijanjanjem
Brzina
Tangencijalno
vV
vT
t=t2:Obimna brzina točka pada ispod normiranog klizanja
Prepoznavanje stanja:vT < 1
Dr Boris Stojić, 2018
Tangencijalno /ugaono
ubrzanje točka
Pritisak u izvršnom organu kočnice
Reakcija sistema:Počinje snižavanje pritiska, dejstvo povratne pumpe
Izvor: Bosch, Trautmann
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
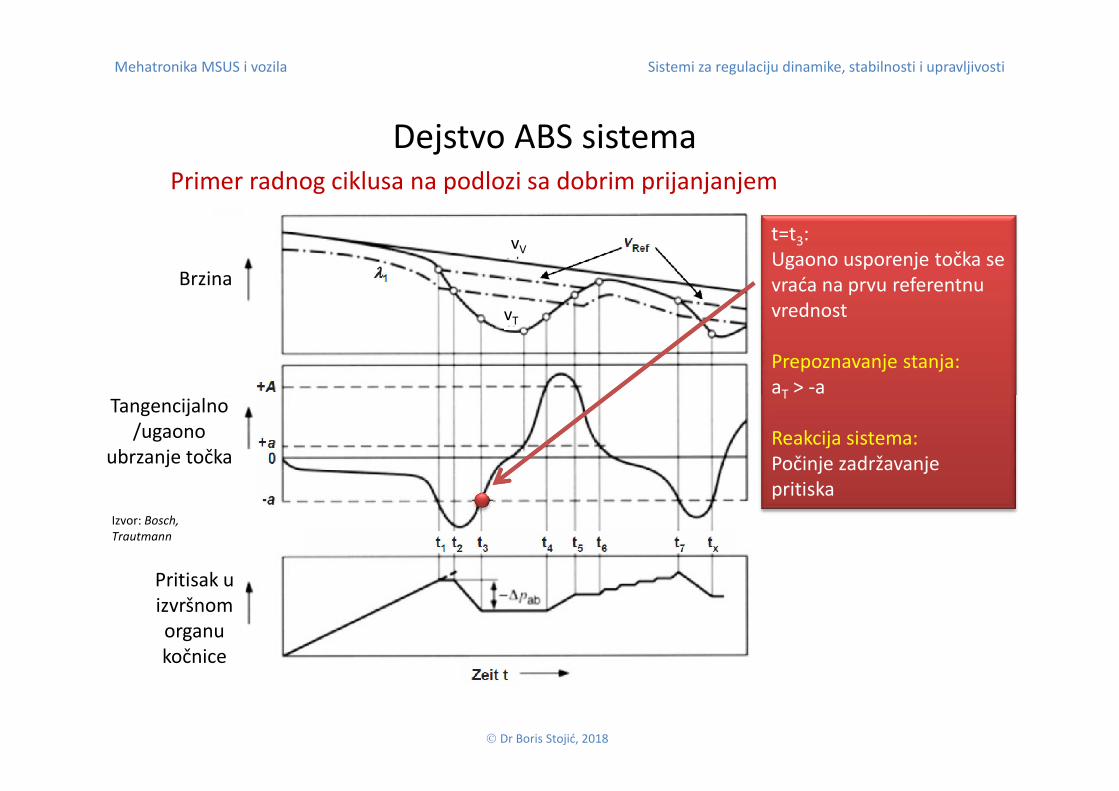
Dejstvo ABS sistemaPrimer radnog ciklusa na podlozi sa dobrim prijanjanjem
Brzina
Tangencijalno
vV
vT
t=t3:Ugaono usporenje točka se vraća na prvu referentnu vrednost
Prepoznavanje stanja:aT > -a
Dr Boris Stojić, 2018
Tangencijalno /ugaono
ubrzanje točka
Pritisak u izvršnom organu kočnice
aT > -a
Reakcija sistema:Počinje zadržavanje pritiska
Izvor: Bosch, Trautmann

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Dejstvo ABS sistemaPrimer radnog ciklusa na podlozi sa dobrim prijanjanjem
Brzina
Tangencijalno
vV
vT
t=t4:Ugaono ubrzanje točka dostiže drugu referentnu vrednost
Prepoznavanje stanja:aT > +A
Dr Boris Stojić, 2018
Izvor: Bosch, Trautmann
Tangencijalno /ugaono
ubrzanje točka
Pritisak u izvršnom organu kočnice
aT > +A
Reakcija sistema:Pritisak na osnovu komande vozača
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
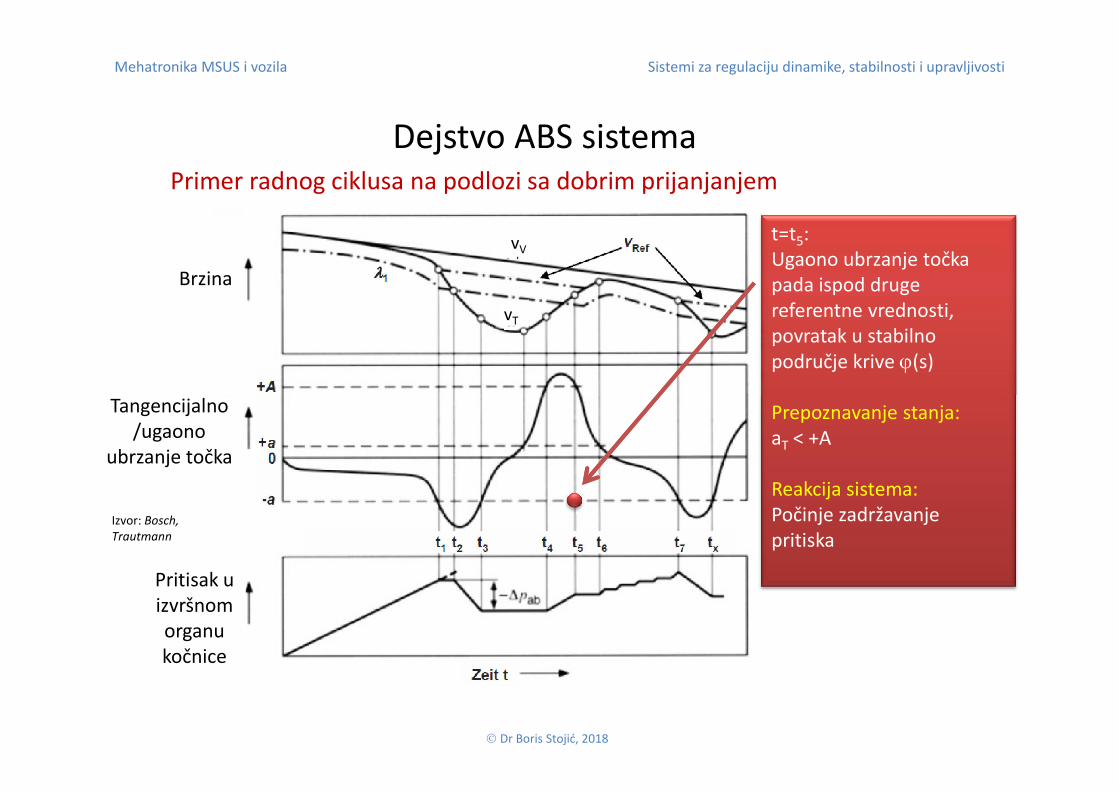
Dejstvo ABS sistemaPrimer radnog ciklusa na podlozi sa dobrim prijanjanjem
Brzina
Tangencijalno
vV
vT
t=t5:Ugaono ubrzanje točka pada ispod druge referentne vrednosti, povratak u stabilno područje krive (s)
Dr Boris Stojić, 2018
Tangencijalno /ugaono
ubrzanje točka
Pritisak u izvršnom organu kočnice
Prepoznavanje stanja:aT < +A
Reakcija sistema:Počinje zadržavanje pritiska
Izvor: Bosch, Trautmann
Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
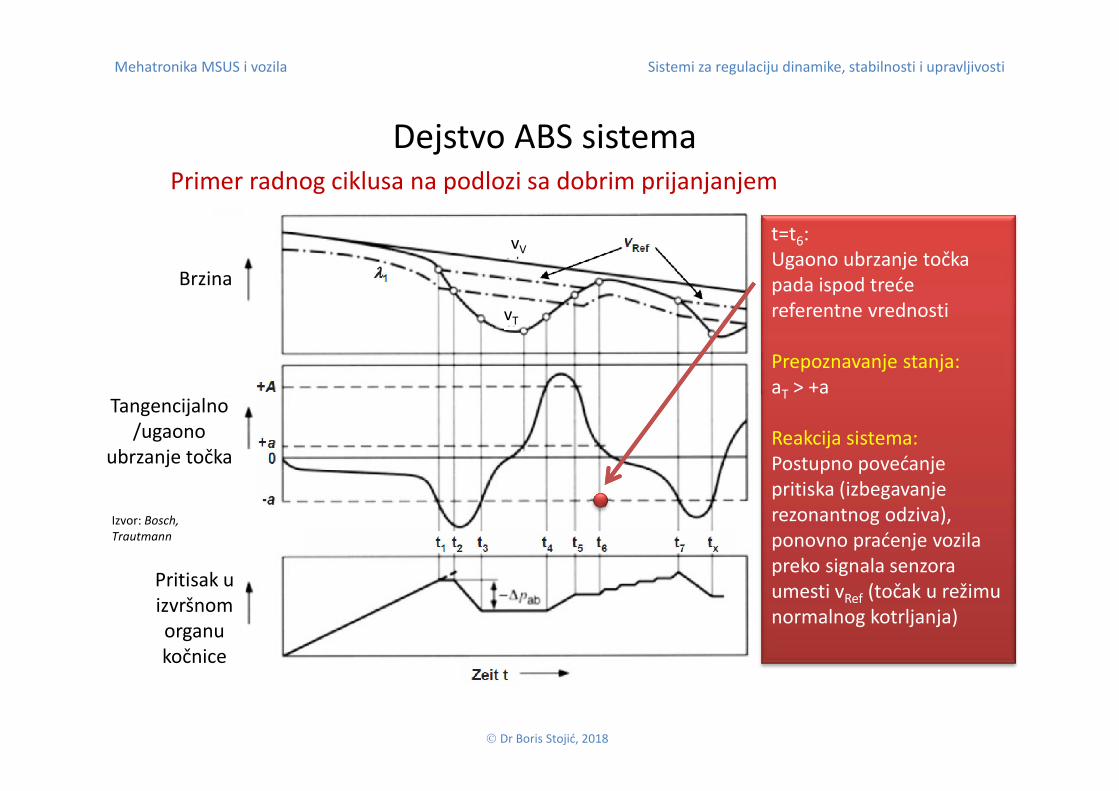
Dejstvo ABS sistemaPrimer radnog ciklusa na podlozi sa dobrim prijanjanjem
Brzina
Tangencijalno
vV
vT
t=t6:Ugaono ubrzanje točka pada ispod treće referentne vrednosti
Prepoznavanje stanja:aT > +a
Dr Boris Stojić, 2018
Tangencijalno /ugaono
ubrzanje točka
Pritisak u izvršnom organu kočnice
aT > +a
Reakcija sistema:Postupno povećanje pritiska (izbegavanje rezonantnog odziva), ponovno praćenje vozila preko signala senzora umesti vRef (točak u režimu normalnog kotrljanja)
Izvor: Bosch, Trautmann

Mehatronika MSUS i vozila Sistemi za regulaciju dinamike, stabilnosti i upravljivosti
Dejstvo ABS sistemaPrimer radnog ciklusa na podlozi sa dobrim prijanjanjem
Brzina
Tangencijalno
vV
vT
t=t7:Ugaono ubrzanje točka ponovo pada ispod prve referentne vrednosti
Prepoznavanje stanja:aT < -a
Dr Boris Stojić, 2018
Tangencijalno /ugaono
ubrzanje točka
Pritisak u izvršnom organu kočnice
aT < -a
Reakcija sistema:Odmah počinje smanjenje pritiska, bez zadržavanja i bez izračunavanja vrednosti 1
Izvor: Bosch, Trautmann