sistemas de ecuaciones no lineales · método de newton modificado (i) método de newton modificado...
TRANSCRIPT
Matemática Superior aplicada
Sistemas de Ecuaciones No Lineales
Profesor: Dr. Alejandro S. M. Santa Cruz JTP: Dr. Juan Ignacio Manassaldi Aux. 2da: Sr. Alejandro Jesús Ladreyt Aux. 2da: Sra. Amalia Rueda
Introducción
Volvemos un tiempo atrás: ¿Qué son los Sistemas de Ecuaciones Lineales?
¿Qué son los Sistemas de Ecuaciones No Lineales?

Introducción
Podemos decir que los sistemas de ecuaciones no-lineales son un conjunto de ecuaciones no-lineales que deben satisfacerse en simultaneo.
1 1 2
2 1 2
1 2
, , , 0
, , , 0
, , , 0
n
n
m n
f x x x
f x x x
f x x x

n-m: grados de libertad
Sistema de ecuaciones algebraicas no lineales
1 1 2
2 1 2
1 2
, , , 0
, , , 0
, , , 0
n
n
m n
f x x x
f x x x
f x x x
1,2, ,
: 1, 2, ,
i
n
j
x R i n
f R R j m
Sin perdida de generalidad supondremos m=n
1 1 2
2 1 2
1 2
, , , 0
, , , 0
, , , 0
n
n
n n
f x x x
f x x x
f x x x

:
n
n n
x R
f R R
Sistema de ecuaciones algebraicas no lineales
1 1 2
2 1 2
1 2
, , ,
, , ,
, , ,
n
n
n n
f x x x
f x x xf x
f x x x
Se define la función vectorial f asociada al sistema de ecuaciones original y el vector de incógnitas x:
1
2
n
x
xx
x
0f x
Por lo tanto, la expresión compacta de un sistema de ecuaciones algebraicas no lineal corresponde a:

1
1
k k
k k
rk
x x
x x
x
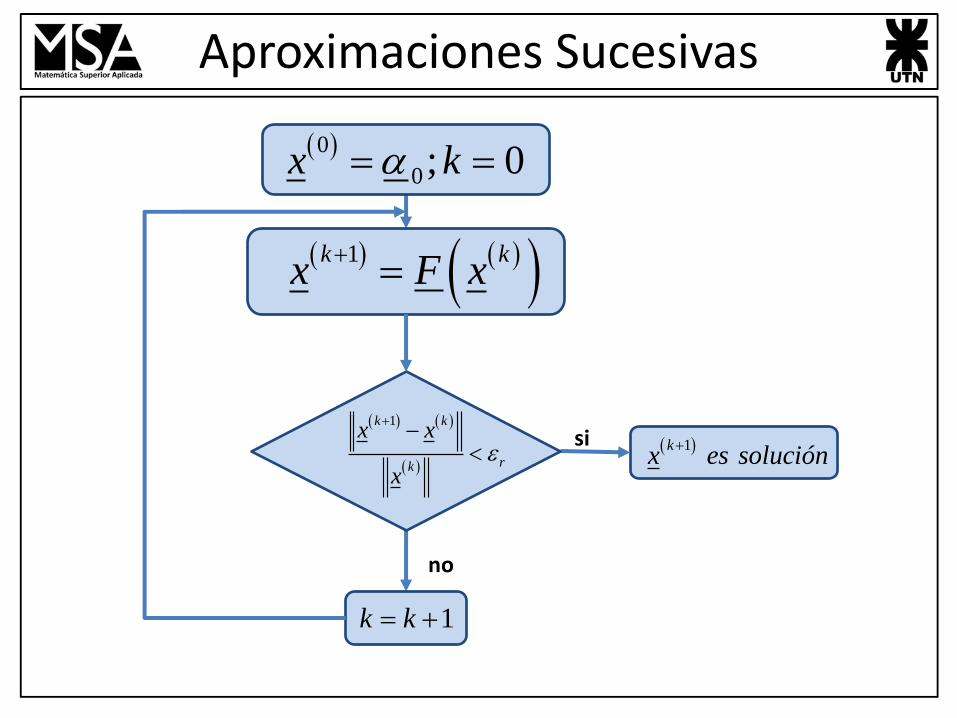
Aproximaciones sucesivas (multivariable)
El valor de arranque o semilla corresponde a un vector:
0
1
00 0 2
0
n
x
1 0x F x
La primera aproximación se obtiene a partir de la función vectorial F asociada al sistema original.
Finalmente se desarrolla el proceso iterativo hasta satisfacer la tolerancia o alcanzar el máximo de iteraciones:
1k kx F x
max1, 2, ...,k k
Al tratarse de vectores el error corresponde a la norma de la diferencia entre dos aproximaciones sucesivas
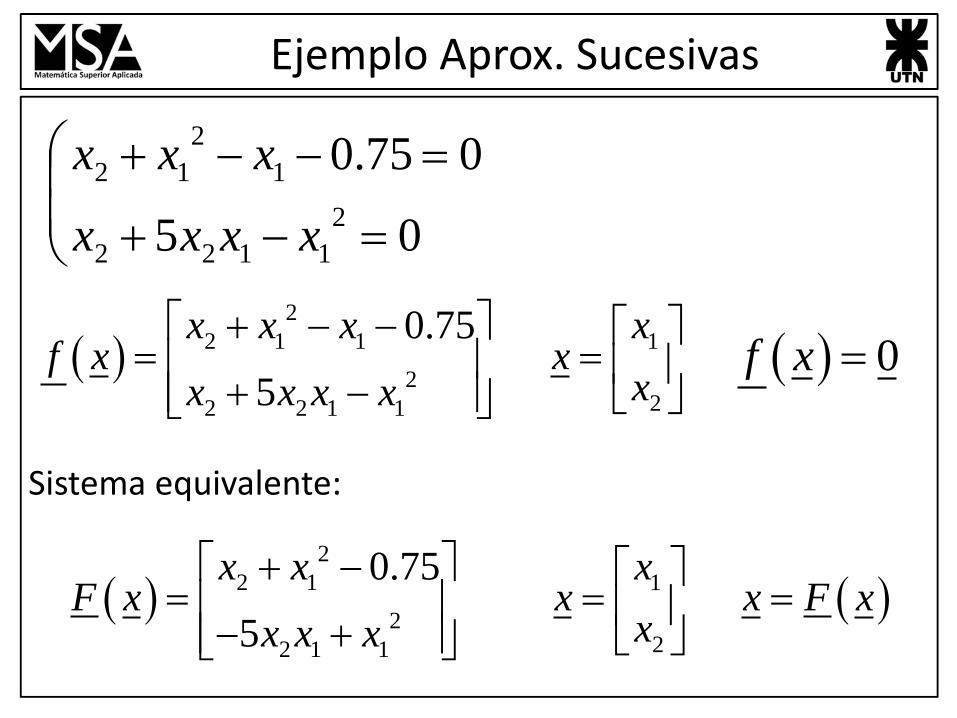
Ejemplo Aprox. Sucesivas
05
075.0
2
1122
1
2
12
xxxx
xxx
2
2 1 1
2
2 2 1 1
0.75
5
x x xf x
x x x x
1
2
xx
x
0f x
2
2 1
2
2 1 1
0.75
5
x xF x
x x x
x F x
1
2
xx
x
Sistema equivalente:

0 1
1x
0
1 1.2500000
4.0000000
F x
x
2 130.8829696e x x
1
2 -3.1875000
26.5625000
F x
x
Ejemplo Aprox. Sucesivas
El error de la iteración 5 corresponde a: 159.6510395 10e
¡El sistema no converge!
2
2 1
2
2 1 1
0.75
5
x xF x
x x x
1
2
xx
x

0 1
1x
0
1 0.8660254
0
F x
x
1
2 1.2712299
0.1732051
F x
x
Ejemplo Aprox. Sucesivas
2 1
2
2 1 1
0.75
5
x xF x
x x x
2
2 1 1
2
2 2 1 1
0.75
5
x x xf x
x x x x
9 1.3720650
0.2395017x
9 8 -76.0051938 10e x x
9 1.3720650 1.3720653
0.2395017 0.2395019F x F
-7
9
-6
-8.4719027 10
-1.0625308 10f x
* 1.3720650
0.2395017x
Aproximaciones Sucesivas
si
no
1kx es solución
1k kx F x
0
0; 0x k
1k k
1k k
rk
x x
x

0
0x
1 0x F x
11
ii
i
q i a n
1
11
k k
i i
i k k
i i
F x F xi a n
x x
1ii iQ q i a n
1k k kx Qx I Q F x
Método de Wegstein (multivariable)
Corresponde a una extensión de lo presentado para una variable.
max1,2,3,...,k k
1k k
rk
x x
x
1 1k kx F x
1
2
0 0
0 0
0 0 0
0 0 0 n
q
q

0 0 1
1x x
0
1 1 1.2500000
4.0000000
F x
x x
1
2 2 -3.1875000
26.5625000
F x
x x
Implementación en el ejemplo
2
2 1
2
2 1 1
0.75
5
x xF x
x x x
1
2
xx
x
2
3 35.9726562
433.5000000
F x
x
2 1
2 11 2
i i
i
i i
F x F xi a
x x
-8.8248239
13.3149284

Implementación en el ejemplo
0.9220646 0
0 0.8744742Q
1 2
1
ii
i
q i a
2 33x Qx I Q x
3 0.9220646 0 -3.1875000 0.1017830 0 35.9726562
0 0.8744742 26.5625000 0 -0.0812022 433.5000000x
3 0.7983380
6.4817440x
3 230.8829696error x x
42 1.3720644
0.2395041x
-75.46739 10error
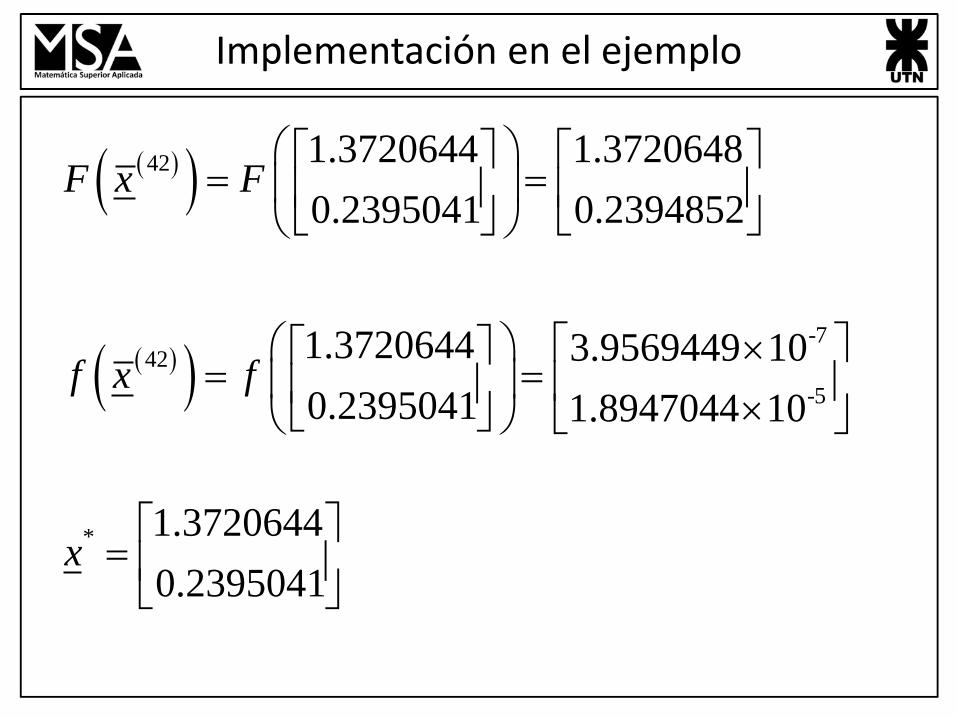
Implementación en el ejemplo
42 1.3720644 1.3720648
0.2395041 0.2394852F x F
-7
42
-5
1.3720644 3.9569449 10
0.2395041 1.8947044 10f x f
* 1.3720644
0.2395041x

Método de Wegstein
si
no
1kx es solución
1k k
1k
1k k
rk
x x
x
0
0x
1 0x F x
1
11
k k
i i
i k k
i i
F x F xi a n
x x
11
ii
i
q i a n
1ii iQ q i a n
1k k kx Qx I Q F x
1 1k k k kx x J x f x
1 1 1
1 2
2 2 2
1 2
1 2
n
n
n n n
n
f f f
x x x
f f f
x x xJ
f f f
x x x
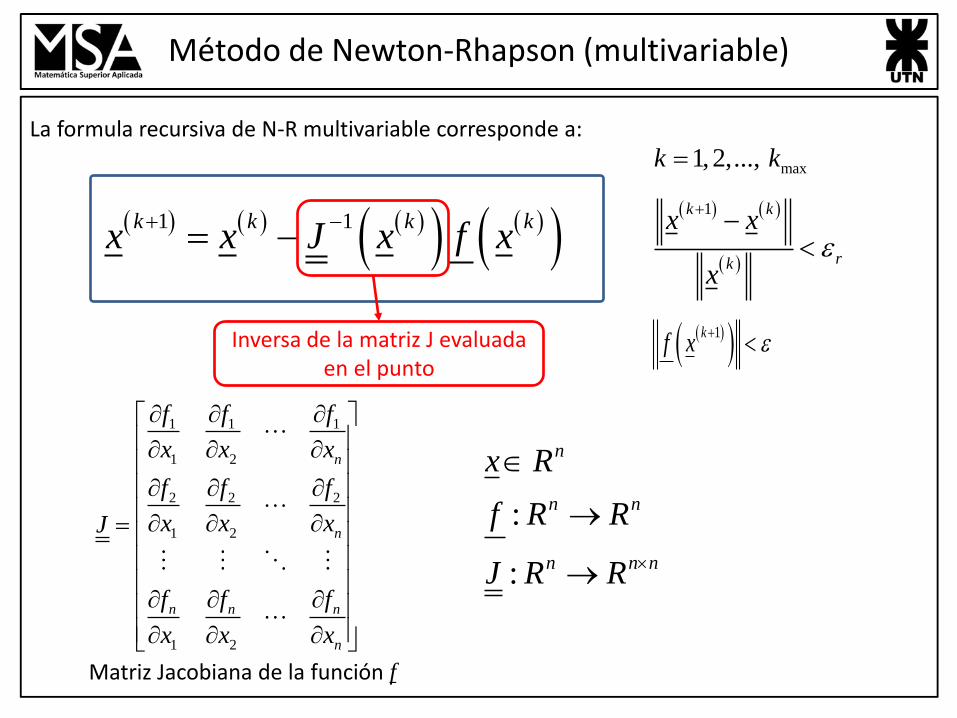
Método de Newton-Rhapson (multivariable)
La formula recursiva de N-R multivariable corresponde a:
1kf x
1k k
rk
x x
x
max1,2,...,k k
Matriz Jacobiana de la función f
Inversa de la matriz J evaluada en el punto
:
:
n
n n
n n n
x R
f R R
J R R

1
2 1 1
2 1 1
5 2 1 5
xJ x
x x x
Implementación en el ejemplo
0 1
1x
1 1 2 1 3 0.25 2.1666667
1 1 1 3 5 0.4166667x
2 2.1666667 0.2580254 -0.0218050 1.3611111 1.6055926
0.4166667 0.1399152 0.0726832 -9.6250000 0.0924692x
2 1 1.6055926 2.1666667 -0.56107410.7576434
0.0924692 0.4166667 0.5091359e x x e
2
2 1 1
2
2 2 1 1
0.75
5
x x xf x
x x x x

3 1.40370400.2409977
0.224078x e
4 1.37277420.0344382
0.2392220x e
5 41.3720658
7.6168800 100.2395018
x e
Implementación en el ejemplo
* 1.3720654
0.2395019x
-12
*
-12
0.1267875 10
-0.3406164 10f x
Podemos afirmar que es solución del sistema.
El error es del orden de 10-7

Método de Newton
si
no
0
0; 0x k
1k k
rk
x x
x
1kx es solución
1k k
1 1k k k kx x J x f x

Requerimos que: 1) El algoritmo progrese hacia la solución en cada paso:
2) Los pasos no sean demasiado grandes:
donde δ es elegido por el algoritmo.
k 1 kf x f x
k 1 kx x δ
Método de Newton modificado (I)

Método de Newton Modificado (II)
Supongamos que tenemos:
A partir del Método de Newton esperamos que:
pero puede que no satisfaga:
Además, si J es singular, p no existe.
1 k kp J x f x
k 1 kx x p
Corrección
p δ

Método de Newton Modificado (III)
En lugar de evaluar la corrección por el Método de Newton, resolvemos un problema de optimización restringida:
sujeto a la restricción:
Esto funciona aún para J singular!!!!
k k
pmín z J x .p f x
p δ
1 k kp J x f x

Si dispusiésemos de un solver que nos permita resolver el problema de optimización, entonces procederíamos de la siguiente manera:
1) Si, entonces parar.
2) Calcular p vía optimización restringida.
3) Si:
aceptar p e ir a la Etapa (1). Aquí podríamos pensar en aumentar δ.
4) Si no, reducir δ y volver a la Etapa (2)
Este algoritmo permite determinar la solución de manera confiable. El problema es que pueda quedar atrapado en un mínimo local de la función.
La clave: Arrancar cerca de la solución!!!
Método de Newton Modificado (IV)
k kf x p f x
kf x ε
1
2 1 1
2 1 1
5 2 1 5
xJ x
x x x
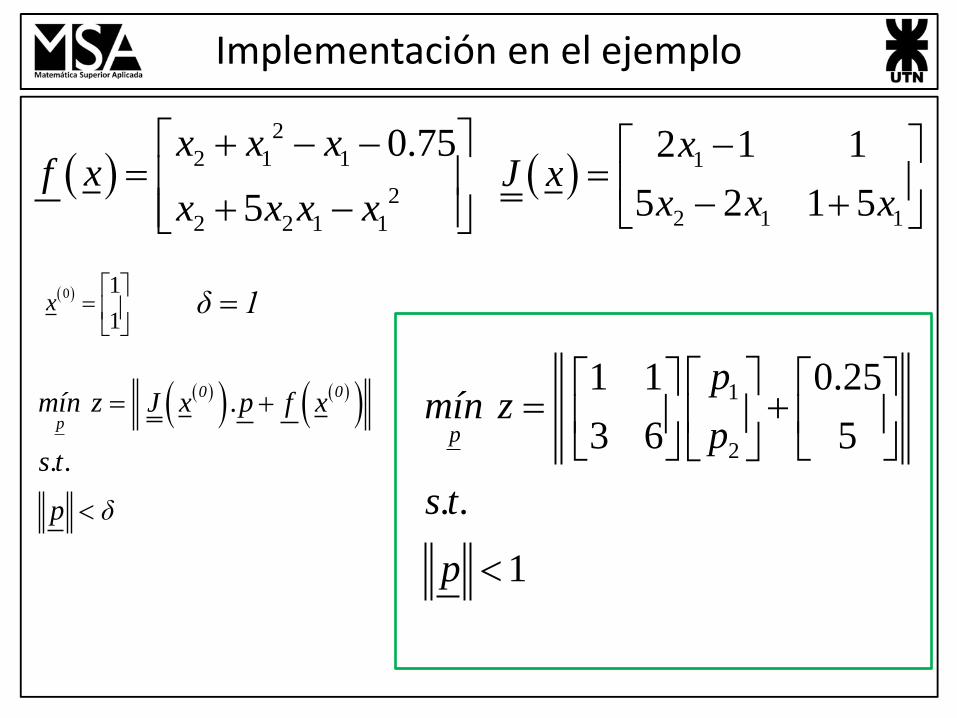
Implementación en el ejemplo
0 1
1x
2
2 1 1
2
2 2 1 1
0.75
5
x x xf x
x x x x
δ 1
0 0
pmín z J x .p f x
s.t.
p δ
1
2
1 1 0.25
3 6 5
. .
1
p
pmín z
p
s t
p

Implementación en el ejemplo
2 2
1 2 1 2
2 2
1 2
0.25 3 6 5
. .
1
pmín z p p p p
s a
p p
1
2
1 1 0.25
3 6 5
. .
1
p
pmín z
p
s a
p

Implementación en el ejemplo
2 2
1 2 1 2
2 2
1 2
0.25 3 6 5
. .
1
pmín z p p p p
s a
p p
0.287116495751276
-0.957895671703289p
1 1 0.287116495751276 1.287116495751276
1 -0.957895671703289 0.042104328296711x

Implementación en el ejemplo
0 0f x p f x
-0.338343293819521 0.25
-1.343598667872214 5
1.385544501191005 5.006246098625197