servo motors - sds drives synchronous servo motors offer an impressive performance Πeven the...
TRANSCRIPT

Servo MotorsSMH & MH - motors
Catalogue: 192-061011 N4 / GBVersion 4, May 2004

2
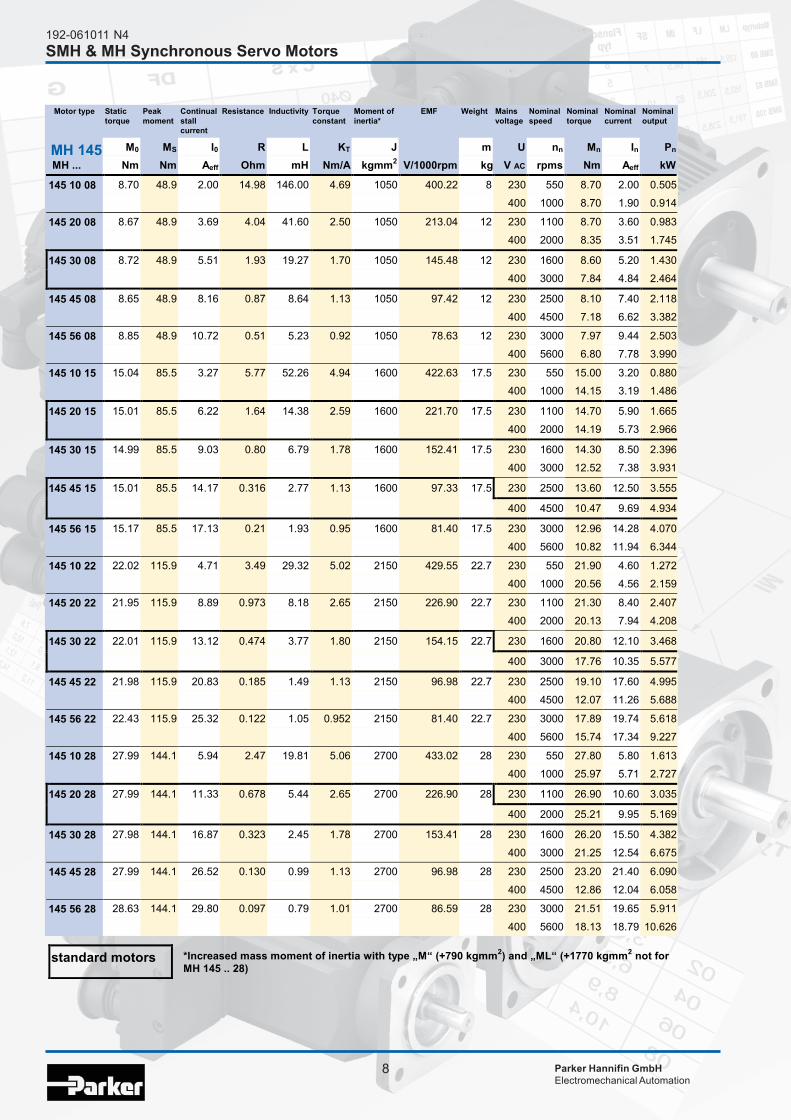
192-061011 N4SMH & MH Synchronous Servo Motors
Parker Hannifin GmbHElectromechanical Automation
Parker Synchronous Servo Motors
SMH & MH SeriesThe SMH and MH motor series developed and produced by Parker Hannifin EMEhave been optimised for a range of applications :
♦♦♦♦♦ Highly-dynamic machines and systems such as packaging machines, pressesand automatic assembly lines.
♦♦♦♦♦ Applications with accurately-synchronised processes..
The important basis for this is the high-quality neodymium-iron-boron magnets thatare used.
All motors are designed using high-quality neodymium-iron-boron magnets.
SMH synchronous servo motors offer an impressive performance � even the small-est motor, the SMH 40, produces a stall torque of 0.35 Nm. SMH motors come with asmooth surface finish and a recessed mounting flange. Retained contamination isthereby kept to a minimum and the installation of a gearbox is considerably simpli-fied. Special options ensure that the motor can be easily adapted to suit a variety ofapplications.These options include:
♦♦♦♦♦ Motor poles: 8
♦♦♦♦♦ Static holding brake (Option-A).
♦♦♦♦♦ B5, B7 and B8 flanges.
♦♦♦♦♦ Alternative rotor inertias (Option-M).
♦♦♦♦♦ SinCos single turn encoder (Option-A6, Option-C6).
♦♦♦♦♦ SinCos multiturn absolute encoder (Option-A7, Option-C7).
♦♦♦♦♦ UL-version upon request (not for SMH40).
The MH series have a finned housing and cover an exceptionally wide performancerange. With the availability of a comprehensive range of options, they can beadapted to suit a large number of applications.These options include:
♦♦♦♦♦ Motor poles: MH56/70: 4; MH105/145/205: 8
♦♦♦♦♦ Static holding brake (Option-A).
♦♦♦♦♦ B5, B6, B9 and B14 flanges.
♦♦♦♦♦ Alternative rotor inertias (Option-M or ML).
♦♦♦♦♦ Passive and fan-assisted cooling (Option-S or SV).
♦♦♦♦♦ �Ex�-protection (upon request).
♦♦♦♦♦ SinCos single turn encoder (Option-A6).
♦♦♦♦♦ SinCos multiturn absolute encoder (Option-A7).

3 Parker Hannifin GmbHElectromechanical Automation
192-061011 N4SMH & MH Synchronous Servo Motors
SMH - MotorsAvailable in 40, 60, 82, 100, 115,130, 142, 145mm flange sizes.Torque range: 0.2 - 15Nm
Motor MH70/105Flange sizes 70, 105, 96, 116mm.Torque range: 0.5 - 8Nm
Motor MH56Flange sizes 56mm.Torque range: 0.2 - 0.6Nm
Motor MH145/205Flange sizes 145, 205mm.Torque range: 4.5 - 90Nm

4
192-061011 N4SMH & MH Synchronous Servo Motors
Parker Hannifin GmbHElectromechanical Automation
Servo Motors SMH - series
Brake specifications (SMH - series)
Tolerance +/-10%. Temperature rise: 65K at 20°C ambient temperature . Data applies to a motor mounted on a flange plate as follows: (Size: up to 2Nm: 200*230*20; up to 35Nm: 200*270*20;
Motor type Statictorque
Peakmoment
Continualstallcurrent
Resistance Inductivity Torqueconstant
Moment ofinertia*
EMF Weight Mainsvoltage
Nominalspeed
Nominaltorque
Nominalcurrent
Nominaloutput
M0 MS I0 R L KT J m U nn Mn In Pn
SMH ... Nm Nm Aeff Ohm mH Nm/A kgmm2 V/1000rpm kg V AC rpms Nm Aeff kW
40 60 0.2 ... xx**...2 0.2 0.63 1.5 8.8 84 0.13 3.5 11.17 0.6 230 6000 0.05 0.4 0.031
40 60 0.35 ... xx**...2 0.35 1.27 1.3 8.8 35 0.26 3.5 22.34 0.6 230 6000 0.21 0.8 0.132
60 30 1.4 ... 2ID...4 1.4 4.4 0.9 47 107 1.48 30.2 126.81 1.5 230 1600 1.33 0.90 0.211
400 3000 1.20 0.80 0.440
60 60 1.4 ... 2ID...4 1.4 4.4 1.7 11.4 32.3 0.81 30.2 69.49 1.5 230 3300 1.18 1.46 0.484
400 6000 1.12 1.40 0.880
60 105 1.4 ... 2ID...4 1.4 4.4 3.0 5.1 10 0.47 30.2 40.23 1.5 230 6000 1.12 2.40 0.703
400 10500 0.4 0.85 0.44
82 30 03 ... 2ID...4 3.0 9.0 1.8 4.4 18.1 1.66 140 142.55 3.5 230 1600 2.91 1.75 0.500
400 3000 2.30 1.4 0.723
82 60 03 ... 2ID...4 3.0 9.0 3.5 3.38 18.2 0.85 140 73.20 3.5 230 3300 2.40 2.8 0.829
400 6000 1.36 1.6 0.855
82 75 03 ... 2ID...4 3.0 9.0 4.4 2.17 8.81 0.68 140 58.25 3.5 230 4300 2.60 3.8 1.171
400 7500 1.94 1.6 1.524
82 60 03 ... 2ID...2 3.0 9.0 6.1 1.1 6.1 0.49 140 41.87 3.5 230 6000 1.70 3.5 1.068
100 56 06 ... 2ID...4 6.0 18.0 5.9 1.12 11.2 1.02 336 87.61 4.7 230 3000 4.70 4.6 1.477
400 5600 1.64 1.61 0.96
100 75 06 ... 2ID...4 6.0 18.0 9.4 0.54 4.13 0.64 336 59.10 4.7 230 4500 3.45 5.4 1.625
400 7500 2.80 4.1 2.199
100 75 06 ... 2ID...2 6.0 18.0 14.7 0.188 1.43 0.41 336 34.89 4.7 230 7500 2.60 6.4 2.042
115 30 10 ... 2I...4 10 32 6.0 2.4 19 1.66 900 142.255 7.7 230 1600 9 5.4 1.508
400 3000 8 4.8 2.513
115 56 10 ...2I ... 4 10 32 10.5 0.8 5.8 0.95 900 81.67 7.7 230 3000 8 8.4 2.513
400 5600 6 6.3 3.519
115 54 10 ... 2I...2 10 32 18.2 0.25 1.8 0.55 900 47.07 7.7 230 5400 7.1 12.9 4.015
①①①① 142 30 15 ... 2I...4 15 47 9.7 1.12 10.7 1.54 1400 132.16 13 230 1800 13.3 8.6 2.507
400 3000 12.5 8.1 3.927
①①①① 142 56 15 ... 2I...4 47 16 0.44 4.5 0.94 1400 80.18 13 230 3000 12.5 13.4 3.927
400 5600 9.2 9.8 5.395
Motor type SMHA60 SMHA82 SMHA100 SMHA115 SMHA142Supply voltage ±10% 24 24 24 24 24 V DCCurrent at 20°C 0.34 0.5 0.67 0.67 0.75 A DCResistance at 20°C 71 48 35.8 35.8 32 Ohmmin. static braking torque 2.2 5 11 11 22 Nmmax. brake closing delay time 14 19 20 20 12.5 msmin. brake opening delay time 28 29 29 29 62 msMoment of Inertia 13 43 104 104 200 kgmm2
Backlash 0 0 0 0 0Weight 0.3 0.7 0.6 2 3 kgType PM PM PM PM PM
!!!!!Preliminary data for SMH142, we reserve the right to make technical changes.**xx for SMH40: 0V = cable with �open� ends (plug).
1IA = Motor connection at the top, Feedback on the right side (front view to shaft).1IC = Motor connection at the top, Feedback on the left side (front view to shaft).
standard motors *Increased mass moment of inertia (Option - M) available with the following motors: SMH60 +29kgmm2, SMH82 +270kgmm2,SMH100 +284kgmm2, SMH115 +900kgmm2, SMH142 +690kgmm2.

5 Parker Hannifin GmbHElectromechanical Automation
192-061011 N4SMH & MH Synchronous Servo Motors
SMHxx...Dimensions SMH - Motors
SMH40...
connection type 2ID
connection type 0V connection type 1IA
SMH60 with EncoderOption - A6 / A7 Option - C6 / C7
61
112
142.5
40
53
61
6232
58
24.5
64,5
40
112
82
163
8240
82
6232
Motor length Brake Encoder A6/A7 / C6/C7 1)
LM --- ---LB ---LE ---LBE
Motor Type LM / LB / LE / LBE SF IM Flange -type DF F D x L bxhxi t1 V x Z QF C x S G
SMH 40 0V 18.6
SMH 40 1IA 0.20.35 101/--/ 142.5 1) / -- 10.3 92.5 5 4.2 46 6x20
9x202x2x-3x3x-
6.810.2 -- 40 Ø30 h6x2 55
SMH 40 1IC 92.5
8 5.5 63 60 Ø40 74SMH 60 1.4 129.5 / 161.0 / 163.0 / 209 /
142.5 1) / 187.5 1) 7 405 6 75
9x2011x23
3x3x164x4x18
10.212.5
-----M4x10 70 Ø60
h6x2.590
8 6.5 100 82 Ø80 112SMH 82 03 163.5 / 206.5 / 183.5 / 226.5 10 40
5 9 11514x3019x40
5x5x256x6x30
1621.5
M5x12.5M6x16 100 Ø95
h6x3.5135
SMH 100 06 191.5 / 238.5 / 211.5 / 258.5 10 40 5 9 115 19x4024x50
6x6x308x7x40
21.527
M6x16M8x19 100 Ø95 h6x3.5 135
8 9 130 115 Ø95 156
7 11 130 130 Ø110 156SMH 115 10 220/265/ 220 / 265 10 41.5
5 11 165
19x4024x5028x60
6x6x308x7x408x7x50
21.52731
M6x16M8x19M10x22 145 Ø130
h6x3.5
196.5
SMH 142 15 243 / 293 / 243 / 293 12 41.5 5 11 16519x4024x5028x60
6x6x308x7x408x7x50
21.52731
M6x16M8x19M10x22
142 Ø130 h6x11 192.5
5Nm: 200*270*20; >35Nm: 310*320*25 in mm)
LM / LB / LE / LBE
S
L
D
SFIM
QF
CF
DF
G
t1h
b
Ø D
V x Z
i
107,4
18.6 3.5
40.1
3
IM
QF
DF
LM / LE
S
L
D
SF
C
i
18 t1h
b
Ø D
IM
7419.8
standard 200mm
1) SMH40 with Option C6, C7 on request Stated in mm

6
192-061011 N4SMH & MH Synchronous Servo Motors
Parker Hannifin GmbHElectromechanical Automation
MH 56
MH 70
Servo Motors MH - seriesMotor type Static
torquePeakmoment
Continualstallcurrent
Resistance Inductivity Torqueconstant
Moment ofInertia
EMF Weight Mainsvoltage
Nominalspeed
Nominaltorque
Nominalcurrent
Nominaloutput
M0 MS I0 R L KT J m U nn Mn In Pn
MH ... Nm Nm Aeff Ohm mH Nm/A kgmm2 V/1000rpm kg V AC rpms Nm Aeff kW56 50 0.2 0.2 1.3 0.27 198.4 338.2 0.828 11 70.82 0.65 230 2500 0.21 0.26 0.055
400 5000 0.185 0.24 0.097
56 95 0.2 0.2 1.3 0.46 66.8 114.9 0.483 11 41.28 0.65 230 5000 0.190 0.42 0.102
400 9500 0.163 0.364 0.163
56 100 0.2 0.2 1.3 0.83 17.85 33.36 0.260 11 22.24 0.65 230 10000 0.145 0.604 0.152
56 50 0.4 0.4 2.5 0.48 71.17 202.3 0.906 16 77.47 0.98 230 2500 0.4 0.46 0.105
400 5000 0.338 0.399 0.177
56 95 0.4 0.4 2.5 0.83 23.0 68.26 0.526 16 44.99 0.98 230 5000 0.350 0.710 0.185
400 9500 0.229 0.478 0.229
56 100 0.4 0.4 2.5 1.52 7.1 11.5 0.290 16 24.80 0.98 230 10000 0.211 0.807 0.222
56 50 0.6 0.6 3.6 0.66 44.48 120.0 0.987 21 84.37 1.3 230 2500 0.600 0.630 0.157
400 5000 0.504 0.542 0.264
56 95 0.6 0.6 3.6 1.20 13.71 37.5 0.551 21 47.17 1.3 230 5000 0.510 0.980 0.266
400 9500 0.248 0.507 0.248
Motor type Statictorque
Peakmoment
Continualstallcurrent
Resistance Inductivity Torqueconstant
Moment ofInertia
EMF Weight Mainsvoltage
Nominalspeed
Nominaltorque
Nominalcurrent
Nominaloutput
M0 MS I0 R L KT J m U nn Mn In Pn
MH ... Nm Nm Aeff Ohm mH Nm/A kgmm2 V/1000rpm kg V AC rpms Nm Aeff kW
70 37 0.5 0.52 2.9 0.422 108.1 184.33 1.25 26.25 106.87 2.0 230 2000 0.5 0.43 0.100
400 3700 0.468 0.39 0.181
70 70 0.5 0.50 2.9 0.715 37.7 58.8 0.70 26.25 60.36 2.0 230 3800 0.440 0.66 0.178
400 7000 0.360 0.54 0.264
70 75 0.5 0.51 2.9 1.366 10.3 15.53 0.38 26.25 32.39 2.0 230 7500 0.351 0.99 0.275
70 37 01 1.03 5.2 0.83 36.5 91.7 1.24 40 106.61 2.75 230 2000 1.0 0.8 0.202
400 3700 0.883 0.741 0.342
70 70 01 0.99 5.2 1.393 13.1 30.68 0.72 40 61.66 2.75 230 3800 0.800 1.23 0.338
400 7000 0.563 0.846 0.412
70 75 01 1.02 5.2 2.64 3.64 8.27 0.39 40 33.44 2.75 230 7500 0.510 1.42 0.401
70 37 1.5 1.50 6.7 1.25 21.9 62.95 1.26 53 108.18 3.5 230 2000 1.50 1.18 0.311
400 3700 1.31 1.09 0.511
70 70 1.5 1.54 6.7 2.24 7.0 20.63 0.72 53 61.36 3.5 230 3800 1.40 1.96 0.542
400 7000 0.85 1.27 0.622
70 75 1.5 1.52 6.7 4.06 2.07 5.60 0.394 53 33.70 3.5 230 7500 0.660 1.85 0.518
70 37 02 1.99 8.4 1.54 16.94 54.3 1.35 67 120.26 4.25 230 2000 1.9 1.47 0.403
400 3700 1.71 1.32 0.664
70 70 02 2.00 8.4 2.82 5.23 16.4 0.74 67 63.75 4.25 230 3800 1.70 2.40 0.684
400 7000 1.06 1.54 0.778

7 Parker Hannifin GmbHElectromechanical Automation
192-061011 N4SMH & MH Synchronous Servo Motors
MH 105
MH 145
standard motors * Increased mass moment of inertia with type "M" (+ 140 kgmm2) and "ML" (+530 kgmm2) not forMH 105...08)
Motor type Statictorque
Peakmoment
Continualstallcurrent
Resistance Inductivity Torqueconstant
Moment ofinertia*
EMF Weight Mainsvoltage
Nominalspeed
Nominaltorque
Nominalcurrent
Nominaloutput
M0 MS I0 R L KT J m U nn Mn In Pn
MH ... Nm Nm Aeff Ohm mH Nm/A kgmm2 V/1000rpm kg V AC rpms Nm Aeff kW
105 30 02 2.17 11.3 1.43 19.05 47.94 1.63 190 138.95 4.9 230 1600 2.20 1.40 0.367
400 3000 2.05 1.33 0.645
105 45 02 2.20 11.3 2.13 8.63 22.32 1.10 190 94.82 4.9 230 2500 2.10 2.0 0.548
400 4500 1.92 1.84 0.910
105 60 02 2.19 11.3 2.84 4.85 12.42 0.82 190 70.72 4.9 230 3000 2.1 2.60 0.649
400 6000 1.76 2.26 1.106
105 50 02 2.22 11.3 4.33 2.09 5.50 0.55 190 47.10 4.9 230 5000 1.84 3.55 0.965
105 30 04 3.95 19.9 2.57 6.69 24.79 1.65 335 141.31 7.0 230 1600 4.00 2.50 0.660
400 3000 3.49 2.23 1.097
105 45 04 3.97 19.9 3.79 3.07 11.53 1.12 335 96.36 7.0 230 2500 3.70 3.50 0.969
400 4500 2.96 2.80 1.399
105 60 04 3.98 19.9 5.01 1.80 6.61 0.85 335 73.00 7.0 230 3000 3.60 4.40 1.115
400 6000 2.40 3.02 1.510
105 50 04 4.01 19.9 7.46 0.81 3.03 0.57 335 49.46 7.0 230 5000 2.65 4.92 1.390
105 30 06 5.98 28.0 3.61 3.68 16.52 1.77 480 152.07 9.1 230 1600 5.90 3.70 0.983
400 3000 5.29 3.14 1.662
105 45 06 5.96 28.0 5.60 1.83 7.93 1.14 480 97.91 9.1 230 2500 5.50 5.00 1.434
400 4500 4.06 3.79 1.918
105 60 06 5.98 28.0 7.41 1.08 4.55 0.86 480 74.19 9.1 230 3000 5.20 6.40 1.635
400 6000 3.09 3.84 1.941
105 50 06 6.00 28.0 11.15 0.47 2.02 0.57 480 49.44 9.1 230 5000 3.51 6.54 1.840
105 30 08 8.01 32.9 5.21 2.63 12.39 1.65 620 141.31 11.2 230 1600 7.8 5.00 1.306
400 3000 6.80 4.35 2.137
105 45 08 7.97 32.9 7.47 1.29 5.95 1.14 620 97.91 11.2 230 2500 7.20 6.60 1.887
400 4500 5.24 4.89 2.473
105 60 08 7.98 32.9 9.73 0.76 3.52 0.88 620 75.38 11.2 230 3000 6.80 8.20 2.149
400 6000 3.57 4.39 2.242
105 50 08 8.04 32.9 14.27 0.36 1.66 0.60 620 51.80 11.2 230 5000 4.42 7.87 2.317
Motor type Statictorque
Peakmoment
Continualstallcurrent
Resistance Inductivity Torqueconstant
Moment ofinertia*
EMF Weight Mainsvoltage
Nominalspeed
Nominaltorque
Nominalcurrent
Nominaloutput
M0 MS I0 R L KT J m U nn Mn In Pn
MH ... Nm Nm Aeff Ohm mH Nm/A kgmm2 V/1000rpm kg V AC rpms Nm Aeff kW
145 10 04 4.46 28.1 1.07 41.84 34.71 4.45 775 381.13 8 230 550 4.50 1.06 0.270
400 1000 4.54 1.06 0.476
145 20 04 4.49 28.1 2.38 8.50 42.45 2.02 775 173.24 8 230 1100 4.50 2.40 0.520
400 2000 4.45 2.30 0.931
145 30 04 4.51 28.1 3.42 4.14 45.88 1.41 775 121.27 8 230 1600 4.50 3.30 0.760
400 3000 4.29 3.17 1.347
145 45 04 4.45 28.1 4.73 2.16 23.40 1.01 775 86.62 8 230 2500 4.50 4.60 0.920
400 4500 3.87 4.03 1.825
145 56 04 4.53 28.1 5.48 1.56 17.96 0.887 775 69.27 8 230 3000 4.29 5.08 1.349
400 5600 3.56 4.65 2.090
8
192-061011 N4SMH & MH Synchronous Servo Motors
Parker Hannifin GmbHElectromechanical Automation
MH 145
standard motors *Increased mass moment of inertia with type �M� (+790 kgmm2) and �ML� (+1770 kgmm2 not forMH 145 .. 28)
145 10 08 8.70 48.9 2.00 14.98 146.00 4.69 1050 400.22 8 230 550 8.70 2.00 0.505
400 1000 8.70 1.90 0.914
145 20 08 8.67 48.9 3.69 4.04 41.60 2.50 1050 213.04 12 230 1100 8.70 3.60 0.983
400 2000 8.35 3.51 1.745
145 30 08 8.72 48.9 5.51 1.93 19.27 1.70 1050 145.48 12 230 1600 8.60 5.20 1.430
400 3000 7.84 4.84 2.464
145 45 08 8.65 48.9 8.16 0.87 8.64 1.13 1050 97.42 12 230 2500 8.10 7.40 2.118
400 4500 7.18 6.62 3.382
145 56 08 8.85 48.9 10.72 0.51 5.23 0.92 1050 78.63 12 230 3000 7.97 9.44 2.503
400 5600 6.80 7.78 3.990
145 10 15 15.04 85.5 3.27 5.77 52.26 4.94 1600 422.63 17.5 230 550 15.00 3.20 0.880
400 1000 14.15 3.19 1.486
145 20 15 15.01 85.5 6.22 1.64 14.38 2.59 1600 221.70 17.5 230 1100 14.70 5.90 1.665
400 2000 14.19 5.73 2.966
145 30 15 14.99 85.5 9.03 0.80 6.79 1.78 1600 152.41 17.5 230 1600 14.30 8.50 2.396
400 3000 12.52 7.38 3.931
145 45 15 15.01 85.5 14.17 0.316 2.77 1.13 1600 97.33 17.5 230 2500 13.60 12.50 3.555
400 4500 10.47 9.69 4.934
145 56 15 15.17 85.5 17.13 0.21 1.93 0.95 1600 81.40 17.5 230 3000 12.96 14.28 4.070
400 5600 10.82 11.94 6.344
145 10 22 22.02 115.9 4.71 3.49 29.32 5.02 2150 429.55 22.7 230 550 21.90 4.60 1.272
400 1000 20.56 4.56 2.159
145 20 22 21.95 115.9 8.89 0.973 8.18 2.65 2150 226.90 22.7 230 1100 21.30 8.40 2.407
400 2000 20.13 7.94 4.208
145 30 22 22.01 115.9 13.12 0.474 3.77 1.80 2150 154.15 22.7 230 1600 20.80 12.10 3.468
400 3000 17.76 10.35 5.577
145 45 22 21.98 115.9 20.83 0.185 1.49 1.13 2150 96.98 22.7 230 2500 19.10 17.60 4.995
400 4500 12.07 11.26 5.688
145 56 22 22.43 115.9 25.32 0.122 1.05 0.952 2150 81.40 22.7 230 3000 17.89 19.74 5.618
400 5600 15.74 17.34 9.227
145 10 28 27.99 144.1 5.94 2.47 19.81 5.06 2700 433.02 28 230 550 27.80 5.80 1.613
400 1000 25.97 5.71 2.727
145 20 28 27.99 144.1 11.33 0.678 5.44 2.65 2700 226.90 28 230 1100 26.90 10.60 3.035
400 2000 25.21 9.95 5.169
145 30 28 27.98 144.1 16.87 0.323 2.45 1.78 2700 153.41 28 230 1600 26.20 15.50 4.382
400 3000 21.25 12.54 6.675
145 45 28 27.99 144.1 26.52 0.130 0.99 1.13 2700 96.98 28 230 2500 23.20 21.40 6.090
400 4500 12.86 12.04 6.058
145 56 28 28.63 144.1 29.80 0.097 0.79 1.01 2700 86.59 28 230 3000 21.51 19.65 5.911
400 5600 18.13 18.79 10.626
Motor type Statictorque
Peakmoment
Continualstallcurrent
Resistance Inductivity Torqueconstant
Moment ofinertia*
EMF Weight Mainsvoltage
Nominalspeed
Nominaltorque
Nominalcurrent
Nominaloutput
M0 MS I0 R L KT J m U nn Mn In Pn
MH ... Nm Nm Aeff Ohm mH Nm/A kgmm2 V/1000rpm kg V AC rpms Nm Aeff kW

9 Parker Hannifin GmbHElectromechanical Automation
192-061011 N4SMH & MH Synchronous Servo Motors
MH 205
Brake specifications (MH - series)
Motor type Statictorque
Peakmoment
Continualstallcurrent
Resistance Inductivity Torqueconstant
Moment ofinertia*
EMF Weight Mainsvoltage
Nominalspeed
Nominaltorque
Nominalcurrent
Nominaloutput
M0 MS I0 R L KT J m U nn Mn In Pn
MH ... Nm Nm Aeff Ohm mH Nm/A kgmm2 V/1000rpm kg V AC rpms Nm Aeff kW
205 10 28 28 122.6 6.90 3.30 36.69 4.35 5000 372.22 29.2 230 550 28.60 6.90 1.657
400 1000 28.15 6.75 2.946
205 20 28 28 122.6 12.99 0.932 8.87 2.31 5000 197.73 29.2 230 1150 27.30 12.70 3.385
400 2000 27.25 12.32 5.704
205 30 28 28 122.6 20.08 0.390 3.47 1.49 5000 127.95 29.2 230 1700 27.60 19.30 4.970
400 3000 25.65 17.96 8.054
205 10 50 50 211.9 12.42 1.17 18.82 4.35 8000 372.22 44 230 550 51.30 12.30 2.977
400 1000 50.40 12.08 5.272
205 20 50 50 211.9 22.08 0.372 4.95 2.45 8000 209.37 44 230 1150 50.00 21.30 5.998
400 2000 46.95 20.07 9.829
205 30 50 50 211.9 33.13 0.165 1.91 1.63 8000 139.57 44 230 1700 48.00 30.80 8.657
400 3000 41.65 26.77 13.078
205 10 70 70 309.8 16.75 0.722 12.65 4.49 11000 383.85 58.8 230 550 68.64 16.50 4.126
400 1000 69.36 16.14 7.282
205 20 70 70 309.8 30.72 0.215 3.30 2.44 11000 209.37 58.8 230 1150 68.60 29.30 8.237
400 2000 62.87 26.89 13.161
205 30 70 70 309.8 46.08 0.095 1.59 1.63 11000 139.57 58.8 230 1700 65.00 41.70 11.711
400 3000 52.31 33.68 16.428
205 10 90 90 398.2 22.13 0.470 9.01 4.35 14000 372.22 73.6 230 550 87.11 21.80 5.271
400 1000 88.21 21.17 9.233
205 20 90 90 398.2 44.26 0.117 2.25 2.17 14000 186.11 73.6 230 1150 87.00 41.80 10.453
400 2000 78.33 37.71 16.372
205 30 90 90 398.2 59.01 0.066 1.26 1.63 14000 139.57 73.6 230 1700 81.70 52.40 14.698
400 3000 61.58 39.70 19.337
standard motors *Increased mass moment of inertia with type �M� (+4400 kgmm2) and �ML� (+12100 kgmm2 notfor MH 205 .. 90)
Motor type MHA56 MHA70 MHA105 MHA145 MHA205Supply voltage ±10% 24 24 24 24 24 V DCCurrent at 20°C 0.32 0.53 1.1 1.8 1.65 A DCResistance at 20°C 76 45 22 13.2 14.5 Ohmmin. static braking torque 0.6 2.0 10 28 120 Nmmax. brake closing delay time 250 250 250 250 150 msmin. brake opening delay time 100 100 100 100 80 msMoment of Inertia 17 29 62.5 195 1000 kgmm2
Backlash 0 0 0 0 0Weight 0.8 1.1 3.0 5.0 14.0 kgType Spring Spring Spring Spring PM

10
192-061011 N4SMH & MH Synchronous Servo Motors
Parker Hannifin GmbHElectromechanical Automation
Dim
ensi
ons
MH
70 a
nd M
H10
5D
imen
sion
s M
H56
Dim
ensi
ons
MH
145
and
MH
205
Stated in mm
Motor length Brake Encoder A6/A7LM --- ---LB ---LE ---LBE
IC
LM / LB
D
S
L
C
SF
t1h
b
Ø Di
73Q
F
F
DF
G
Motor Type LM / LB SF IC Flange type DF F D x L bxhxi t1 QF C x S G0.2 130.5 / 181.5 / ---.- / ---.-0.4 150.5 / 201.5 / ---.- / ---.-MH 560.6 170.5 / 221.5 / ---.- / ---.-
6.5 40 5 5.5 63 9x2011x23
3 x 3 x 164 x 4 x 18
10.212.5 56 Ø40 h6x2.5 74
i
IC
LM / LB / LE /LBED
S
L
QF C
F
DF
SF
G
t1h
b
Ø D
V x Z
Motor Type LM / LB / LE / LBE SF IC Flange -type DF F D x L bxhxi t1 V x Z QF C x S G
0.5 158 / 214 / --- / ---01 188 / 244 / --- / ---1.5 218 / 274 / --- / ---
MH 70
02 248 / 304 / --- / ---
8.5 85 5 6 75 11x2314x30
4x4x185x5x25
12.516
M4x10M5x12.5 70 Ø60 h6x2.5 90
02 186 / 250 / 206 / 26004 (02 ML) 229 / 293 / 250 / 30406 (04 ML) 273 / 337 / 294 / 348
MH 105flange5/14
08 (06 ML) 317 / 381 / 338 / 392
514
9.5M8 115 105 Ø95 h6x3.5 140
02 186 / 250 / 206 / 26004 (02 ML) 229 / 293 / 250 / 30406 (04 ML) 273 / 337 / 294 / 348
MH 105flange
6/908 (06 ML) 317 / 381 / 338 / 392
10 90
69
97
130100
19x4024x50
6x6x308x7x40
21.527
M6x16M8x19
11696
Ø110Ø80
h6x3.5h6x3.5
155128
IM
LM / LB / LE / LBE
D
S
L
QF C
F
DF
SF
G
IC
t1
h
b
Ø D
V x Z
i
*applies only to SinCos Multiturn (Option A7)Option A6 (SinCos Singleturn) has for MH205 no effect on the motor length (then LM and LB apply).
Motor Type LM / LB / LE / LBE SF IM IC Flange -type DF F D x L bxhxi t1 V x Z QF C x S G
04 200 / 274 / 220 / 29408 (04 ML) 231 / 305 / 251 / 32515 (08 ML) 292 / 366 / 312 / 39622 (15 ML) 354 / 428 / 374 / 448
MH145
28 (22 ML) 416 / 490 / 436 / 510
12 125 103 514
11.5M10 165 24x50
28x608x7x408x7x50
2731
M8x19M10x22 145 Ø130 h6x3.5 200
28 273 / 372 / 293* / 392*50 (28 ML) 342 / 441 / 362* / 461*70 (50 ML) 411 / 510 / 431* / 530*
MH205
90 (70 ML) 480 / 579 / 500* / 599*
18 172 132 5 14 215 38x8042x110
10x8x7012x8x100
4145
M12x32M16x40 205 Ø180 h6x4 250
MH105 with passive / active coolingMotor length with Option-V LM + 34mmMotor length with Option-SV LM + 64mmSupply voltage 24VDC
MH145/MH205 with passive / active coolingMH145 MH205
Motor length with Option-V LM + 44mm LM + 54mmMotor length with Option-SV LM + 97mm LM + 109mmSupply voltage 230VAC 230VAC

11 Parker Hannifin GmbHElectromechanical Automation
192-061011 N4SMH & MH Synchronous Servo Motors
Order code for the motors
Only enter yellow sections of the ordercode if the corresponding option is re-quired, otherwise leave the section out.
If you need further detailed information on the motors, we will pleased to send you our application manual : Order No. 192-061020We reserve the right to make modifications without prior notice. Data corresponds to the current specification at the time of printing.
1 ) Resulting in longer motor: MH105 +34mm; MH145 +44mm; MH205 +54mm.2 ) Resulting in longer motor: MH105 +64mm; MH145 +97mm; MH205 +109mm
Supply voltage: MH105: 24VDC; MH145: 230VAC; MH205: 230VAC.3 ) Except for motors which are designed for 230V, then the following applies: Speed = 230V speed; mains power supply �2� for 230VAC.4 ) For availability see the dimension tables.5 ) Resulting in longer motor : SMH60 +31,5mm, SMH82 +43mm, SMH100 +47mm, SMH115 +45mm, SMH142 +50mm.6 ) Not available with MH105 08, MH145 28 and MH205 90.7 ) Thus longer motor: see the dimensions table8 ) Connection type 0V with SMH40: Cable with Molex plugs, cable length: 200mm.Additional options on request (Encoder, Explosion protection).
SMH / MH motors
Motor typeMH: MH-Motor (Resolver)SMH: SMH-Motor (Resolver)
A: with brake (not for SMH40)Cooling (available for MH105/145/205 )V: passive cooling 1)
SV: active cooling 2)
Size of motorSMH: 40/60/82/100/115/142MH: 56/70/105/145/205
Speedin 100�s of rpm at 400 VAC 3)
Motor-Type (as specified in the tables)
Flange type B...5, 6, 7, 8, 9 or 4 for flange 14 4)
Shaft diameter9/11/14/19/24/28/38/42
ShaftS: without feather key
Type of connections0V 8), 1IA, 1IC: SMH402ID: SMH60/82/100/MH562I: SMH115/SMH142/MH70/MH1053I: MH145/205
Protection class64: IP64 (SMH40 only available with IP64)65: IP65 (Standard)
SinCos© typeA6: Singleturn (SRS50) (not available with SMH40, MH56, MH70)A7: Multiturn (SRM50) (not available with SMH40, MH56, MH70, MH205 with SV)C6: Singleturn (SKS36) (only available with SMH60; SMH40 on request)C7: Multiturn (SKM36) (only available with SMH60; SMH40 on request)
Increased moment of inertiaM: (available with MH105/145/205, SMH60/82/100/115/142 ) 5)
ML: (available with MH105/145/205 ) 6) 7)
Mains power supply (drive)4: 400VAC 3)

Parker Hannifin S. p. AElectromechanical AutomationVia Gounod 1I-20092 Cinisello Balsamo (MI),Italy
+39 0266012459+39 0266012808
Website: www.parker-eme.come-mail: [email protected]
Parker Hannifin GmbH & Co.KGElectromechanical AutomationRobert-Bosch-Str. 22D-77656 Offenburg,Germany
+49 (0)781 509 0+49 (0)781 509 98176
Website: www.parker-eme.come-mail: [email protected]
Parker Hannifin plcElectromechanical AutomationArena Business CentreHoly Rood Close, Poole, Dorset.BH17 7BA UK
+44 (0)1202 606300+44 (0)1202 606301
Website: www.parker-eme.come-mail: [email protected]
Would you like more information?We would be happy to send you our brochures and catalogs!
Or call us and set up a meeting.
- Your partner for automation
Our product program:
ParkerElectromechanical Automation
Visualisation Control Technology
Drive TechnologyServo Drives / Stepper Drives
Motors / Gears Direct Drive TechnologyLinear motors / Torque motors
Handling ActuatorsCylinders / Actuators
Precision ActuatorsScrew Driven / Linear Motor Driven
Distributed Automation
We
rese
rve
the
right
to m
ake
tech
nica
l cha
nges
.Th
e in
form
atio
n co
ntai
ned
in th
is m
anua
l cor
resp
onds
to th
e cu
rren
t sta
tus
at th
e tim
e of
prin
ting.
2. re
prin
t 200
5/05
/25