seminarska naloga vrtilna hitrost -...
TRANSCRIPT

UNIVERZA V LJUBLJANI FAKULTETA ZA ELEKTROTEHNIKO
Seminarska naloga
VRTILNA HITROST (merjenje s Hallovo sondo, kapacitivnim senzorjem, induktivnim senzorjem in AMR
senzorjem)
Pri predmetu MERILNI PRETVORNIKI
Ljubljana, 05.05.2011 Kos Miran, 64080044 Kren Jože, 64080060

Kos, Kren Vrtilna hitrost MP
2
Kazalo
1. Uvod ................................................................................................................................... 3
2. Hallov senzor ...................................................................................................................... 4
2.1 Zgradba in delovanje ................................................................................................... 4
2.2 Lastnosti Hallove sonde ............................................................................................... 5
2.3 Merjenje vrtilne hitrosti ............................................................................................... 5
2.4 Delovanje ..................................................................................................................... 6
2.5 Tipi senzorjev .............................................................................................................. 7
2.5.1 Ničelni hitrostni senzor (HS) ................................................................................ 7
2.5.2 Senzor hitrosti in smeri (HD) ............................................................................... 7
2.5.3 Senzor za merjenje hitrosti s kvadratnim izhodom (HQ) ..................................... 8
2.5.4 Ostalo ................................................................................................................... 9
3. Kapacitivni senzor .............................................................................................................. 9
3.1 Merjenje vrtilne hitrosti ............................................................................................. 10
4. Induktivni senzor .............................................................................................................. 10
4.1 Induktivni senzor z oscilatorjem ................................................................................ 11
5. AMR senzor (anizotropni magnetni senzor) .................................................................... 12
5.1 Zgradba ...................................................................................................................... 12
5.2 Merjenje vrtilne hitrosti ............................................................................................. 13
6. Sklep ................................................................................................................................. 14
7. Viri in literatura ................................................................................................................ 15

Kos, Kren Vrtilna hitrost MP
3
1. Uvod
Vrtilna hitrost je pomemben parameter rotirajočih delov s katerim lahko ugotovimo v katerem
stanju se rotirajoče telo nahaja (miruje, pospešuje, zavira ali se vrti s konstantno hitrostjo). Ta
pridobljeni podatek lahko prikazujemo kot vhodni podatek za krmiljenje katerega izmed
industrijskih procesov, kot parameter regulacije katerega postroja (turbinska regulacija).
Narekuje tudi delovanje varnostnih sistemov, kot je ABS v avtomobilih.
Merimo zato, da pridobimo objektiven in ponovljiv podatek o velikosti, množini in jakosti
fizikalnih veličin kot so dolžina, čas, napetost, tok, moč, hitrost,…
Merimo zato, da preverimo, če proizvodi dosegajo ustrezno kvaliteto, da je porabo sredstev
čim manjša in finančni prihranek velik, da pridobimo potrebne podatke za nadaljnje odločitve
pravilne ugotovitve cen posameznih proizvodov.
Aktualni senzorji:
Hall-ov senzor
Kapacitivni senzor
Induktivni senzor
AMR senzor
Senzorji se uporabljajo za zaznavanje feromagnetnih (kovinskih) objektov, merilnih
inštrumentov s katerimi zaznavamo njihov odziv, ter o njihovem povezovanju, za uporabo v
aplikacijah merjenja vrtilne hitrosti…

Kos, Kren Vrtilna hitrost MP
4
2. Hallov senzor
2.1 Zgradba in delovanje
Hallov senzor oz. efekt je bil odkrit leta 1879. Ime je dobil po Edvinu Hallu, kateri ga je tudi
odkril. Hall je opazil tudi zanimivo lastnost, če se polprevodnik nahaja v nekem zunanjem
magnetnem polju in skozi njega teče enosmerni električni tok, deluje na nosilce naboja (vrzeli
in elektrone) neka dodatna sila, ki ji pravimo Lorenzova sila. Naboji se začnejo zaradi te sile
premikati na tisto stran polprevodnika, ki jo določa smer magnetnega pola. Zaradi dodatnega
premika nabojev se pojavi električno polje med različnimi deli polprevodnika. Na stranicah se
kopiči električni naboj toliko časa, dokler sila električnega polja ni neka Lorenzovi sili.
Slika1: Hallov senzor
Napetost med skrajnima deloma polprevodnika je Hallova napetost (UH). Večja je napetost
polprevodnika, bolj je tehnično uporabna. V praksi to pomeni, da je razmerje med dolžino l in
širino d čim večje.

Kos, Kren Vrtilna hitrost MP
5
2.2 Lastnosti Hallove sonde
Napajalni tok sonde je odvisen od njene debeline in znaša od nekaj 10 mA do 100 mA. Potek
izhodne napetosti je v odvisnosti od magnetnega polja B nelinearen. Karakteristiko pa lahko
razdelimo na linearni in nelinearni del, pri čemer je uporaben samo linearni. Značilna pa je še
velika temperaturna odvisnost izhodne napetosti UH.
Slika 2: Potek izhodne napetosti v odvisnosti od magnetnega polja
2.3 Merjenje vrtilne hitrosti
Hallov senzor zagotavlja zanesljivo in cenovno ugodno rešitev za merjenje vrtilne hitrosti osi.
Deluje na principu zaznavanja magnetnega polja B, zato se dobro obnese v slabih razmerah
kot so prah, olje in drugi viri onesnaženja. Ker v naravi redko najdemo magnetna polja večjih
jakosti, se te vrste senzorji dobro odnesejo glede nezaželenih motenj.
Feromagnetni zobniki predstavljajo najbolj pogost material, na katerem zaznavamo vrtilno
hitrost. Takšen senzor lahko uporabimo tudi za zaznavanje vijakov ali kovinskih verig. Dobro
se obnese tudi, če je del kovine na nekem neferomagnetiku. Obstaja veliko različnih izvedb
senzorja za zaznavanje kovinskih zob. Pregledali bomo nekaj izvedb, ki temeljijo na uporabi
Hallovega senzorja.

Kos, Kren Vrtilna hitrost MP
6
2.4 Delovanje
Hallov element je nameščen pred magnet, ki ustvarja magnetno polje. Ko gre zob mimo
senzorja, povzroči povečanje magnetnega polja skozi Hallov element. Ko senzor prečka
presledek med zobmi zobnika se magnetno polje skozi Hallov element zmanjša. Z nastavitvijo
ustreznega pragu, zaznavamo prisotnost zoba, vendar ta določitev predstavlja ključni problem
takšnega tipa senzorja. V praksi, zato senzorji, ki uporabljajo tak pristop, običajno vsebujejo
vezje, ki dinamično prilagaja pragovno vrednost, glede na polje ki ga dejansko zaznavamo.
Drug način izvedbe senzorja deluje na principu zaznavanja gradienta. Ta izvedba ustreza
aplikacijam pri katerih je nujno poznati točen položaj roba zoba, ki prečka senzor. Pri prej
opisanem tipu senzorja, je detekcija zavisela od oddaljenosti senzorja do zoba in od
nastavljene vrednosti praga. Merjenje gradienta, nam zagotovi dobro informacijo o tem, kje se
nahaja rob zaznanega zoba. Gradient je v praksi težko meriti, vendar se zelo dober rezultat
pridobi z odštevanjem dveh izhodov senzorjev nameščenih zelo blizu skupaj. Signala
pridobljena iz posameznih senzorjev sta po obliki podobna prejšnjemu tipu senzorja, vendar
pa se informacija skriva v dejstvu, da istočasno vidita vsak svoj del opazovanega objekta.
Odštevanje signalov kaže v signal, ki prikazuje kje se nahaja rob iskanega zoba. Za
zagotovitev dobrega signala je potrebno zelo dobro ujemanje občutljivosti obeh senzorjev.
Slika 3:Hallov element na zobnikih

Kos, Kren Vrtilna hitrost MP
7
2.5 Tipi senzorjev
2.5.1 Ničelni hitrostni senzor (HS)
Brezkontaktni magnetni senzor, ki meri popačenje magnetnega polja, ustvarjenega preko
feromagnetnega objekta. Ti senzorji zagotavljajo zelo natančne meritve gibanja, tudi ob
mirovanju. Ravno zaradi takšnih lastnosti so zelo dobro za merjenje hitrosti. Ena izmed
dobrih lastnosti teh senzorjev je digitalni izhod, pri katerem je amplituda signala konstantna,
tudi če spremenimo hitrost.
Taka vrsta senzorjev se uporablja predvsem v avtomobilih (hitrost motorja, dinamometer,
ročična gred), v električnih generatorjih (hitrost motorja, merjenje pretoka).
Slika 4: Ničelni hitrostni senzor
2.5.2 Senzor hitrosti in smeri (HD)
Brezkontaktni senzor, ki meri popačenje magnetnega polja in nam zagotavlja natančno
meritev hitrosti in smeri. Za razliko od prejšnega ima ta dva digitalna izhoda. Prvi meri hitrost
kolesa, drugi pa nam pove v katero smer se vrti. Odvisno od smeri vrtenja dobimo tudi
končen rezultat, ki je lahko logična ena (1) ter logična nič (0).
Uporablja se v iste namene kot prejšna različica senzorja.
Kos, Kren Vrtilna hitrost MP
8
Slika 5: Senzor hitrosti in smeri
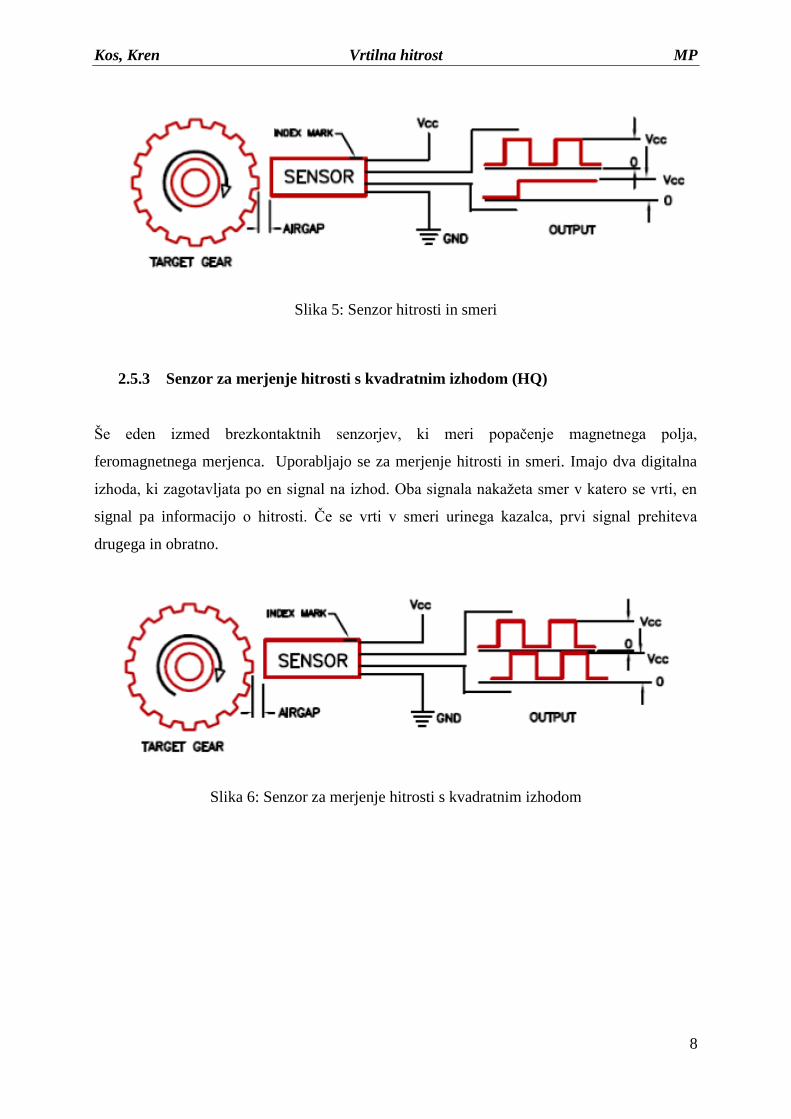
2.5.3 Senzor za merjenje hitrosti s kvadratnim izhodom (HQ)
Še eden izmed brezkontaktnih senzorjev, ki meri popačenje magnetnega polja,
feromagnetnega merjenca. Uporabljajo se za merjenje hitrosti in smeri. Imajo dva digitalna
izhoda, ki zagotavljata po en signal na izhod. Oba signala nakažeta smer v katero se vrti, en
signal pa informacijo o hitrosti. Če se vrti v smeri urinega kazalca, prvi signal prehiteva
drugega in obratno.
Slika 6: Senzor za merjenje hitrosti s kvadratnim izhodom

Kos, Kren Vrtilna hitrost MP
9
2.5.4 Ostalo
Senzorje se najde tudi v disketnih enotah, ABS, videorekorderju, CD pogon….
Slika 7: Hallov senzor v CD pogonu
3. Kapacitivni senzor
V današnjem času so ti senzorji zelo razširjeni in uporabni glede na svojo izvedbo oz.
delovanje. Princip delovanja temelji na merjenju spremembe električne kapacitivnosti v RC
vezju, glede na približevanje različnih materialov (tudi neferomagnetnih). Kapacitivno stikalo
ustvari električno polje med aktivno elektrodo in maso. V primeru, da postavimo nek objekt v
njegovo bližino, se spremeni kapacitivnost v RC vezju. Ta povzroči spremembo frekvence
oscilatorja. Glede na stanje frekvence se na izhodu pretvori signal v stanje ena ali nič. Takšna
izvedba bi bila primerna za štetje zob.
Slika 8:Shema kapacitivnega senzorja

Kos, Kren Vrtilna hitrost MP
10
3.1 Merjenje vrtilne hitrosti
Za merjenje vrtilne hitrosti se takšen senzor ne uporablja tako pogosto. Uporablja se
predvsem tam, kjer so potrebne velike ločljivosti merjenja ter pri materialih, ki imajo slabe
magnetne lastnosti.
Slika 9: Vrtilna hitrost s kapacitivnim senzorjem
4. Induktivni senzor
V današnjem času so približevalna stikala v industriji nepogrešljiva. V primerjavi z
mehanskimi ponujajo idealne pogoje pri delu brez dotika in obrabe. Imajo dokaj visoko
preklopno frekvenco in natančnost. So neobčutljivi na vibracije ter vlago ter brezdotično
zaznavajo vse kovine. So dokaj enostavni za uporabo ter imajo spremenljivo ceno.
Primerni so predvsem v industrijah, kjer zaznavajo več vrst premikov. Najbolj znan senzor je
VR senzor, ki deluje na principu spremenljive reluktance.
V senzorju je navita tuljava okrog cilindričnega feromagnetnega materiala, kateremu je dodan
magnet. Magnet skozi jedro in navitje povzroči magnetno polje, katero izstopa skozi jedro. Če
se feromagnetni material premika pred konico senzorja, se fluks zaključi po drugi strani, polje
skozi tuljavo se spremeni, kar se vidi v inducirani napetosti na tuljavi.
Senzorji so pasivni elementi in ne potrebujejo napajanja za generiranje izhodnega signala.
Kos, Kren Vrtilna hitrost MP
11
Slika 10: Induktivni senzor-merjenje amplitude
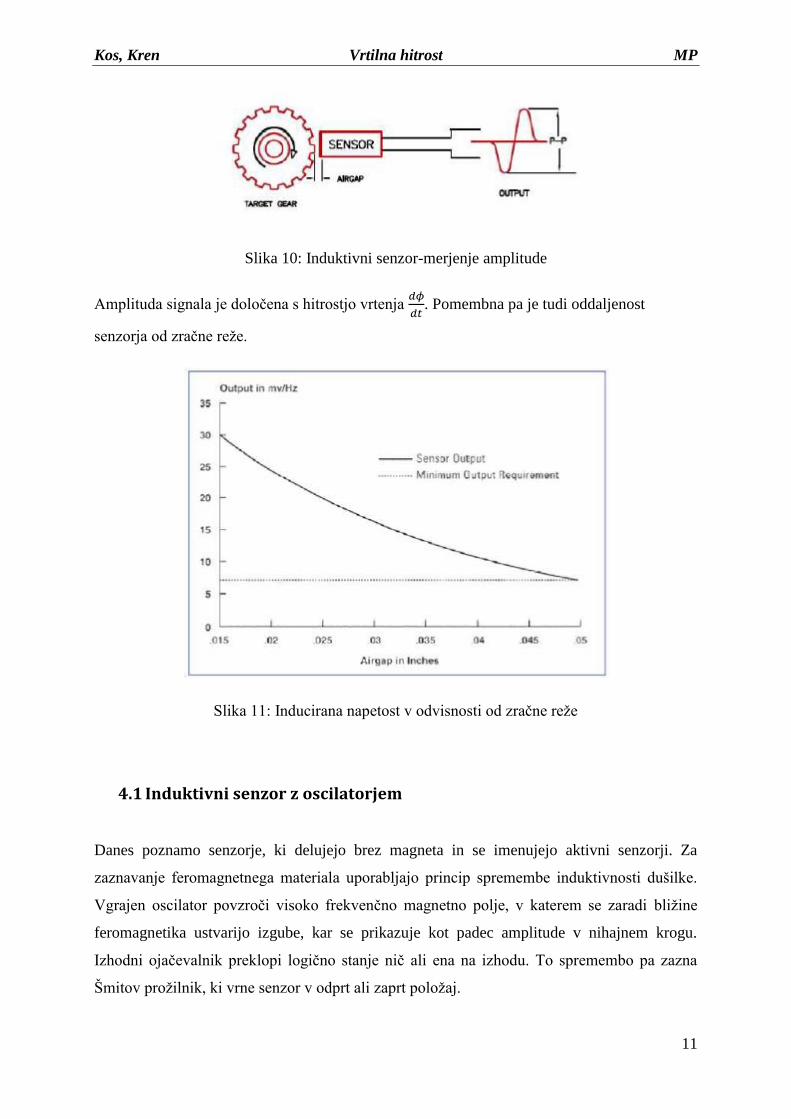
Amplituda signala je določena s hitrostjo vrtenja
. Pomembna pa je tudi oddaljenost
senzorja od zračne reže.
Slika 11: Inducirana napetost v odvisnosti od zračne reže
4.1 Induktivni senzor z oscilatorjem
Danes poznamo senzorje, ki delujejo brez magneta in se imenujejo aktivni senzorji. Za
zaznavanje feromagnetnega materiala uporabljajo princip spremembe induktivnosti dušilke.
Vgrajen oscilator povzroči visoko frekvenčno magnetno polje, v katerem se zaradi bližine
feromagnetika ustvarijo izgube, kar se prikazuje kot padec amplitude v nihajnem krogu.
Izhodni ojačevalnik preklopi logično stanje nič ali ena na izhodu. To spremembo pa zazna
Šmitov prožilnik, ki vrne senzor v odprt ali zaprt položaj.

Kos, Kren Vrtilna hitrost MP
12
5. AMR senzor (anizotropni magnetni senzor)
AMR senzorji so za razliko od magnetnih uporov in GMR senzorjev namenjeni predvsem
merjenju in zaznavanju šibkih magnetnih polj (med 10-9
T do 10-3
T). V praksi se uporabljajo
za merjenje magnetnega polja in zaznavanje anomalije magnetnega polja zaradi prisotnosti
drugih feromagnetnih materialov (detekcija avtomobilov, detekcija kovin, iskanje rud).
Omenjeni senzor se uporablja tudi za merjenje tokov in kot bralna glava v kasetnikih in
disketnih pogonih.
5.1 Zgradba
AMR senzor je zgrajen iz polprevodniške tanke silicijeve rezine, na katero je nanešena zlitina
niklja (Ni) in železa (Fe). Nanos zlitine je oblikovan v obliki uporovnega traku. Ker je
sprememba upornosti takšnega traku v prisotnosti zunanjega polja le 2-3%, je senzor običajno
sestavljen iz štirih uporovnih trakov, ki predstavljajo Wheatstonov mostič. Napetost na
diagonalah, ki je premosorazmerna zunanjemu magnetnemu polju, je ojačena s pomočjo
instrumentacijskega ojačevalnika. Na takšen način je možno zaznavati jakost in smer
magnetnega polja vzdolž ene smeri senzorja.
Slika 12: AMR senzor v obliki Wheatstonovega mostiča

Kos, Kren Vrtilna hitrost MP
13
5.2 Merjenje vrtilne hitrosti
Kot vsi senzorji, je tudi AMR senzor občutljiv na spremembo magnetnega polja, ki popači
merilno točnost. Ta vpliv je v AMR senzorjih še močnejši, saj lahko močnejše tuje vzbujanje
uniči usmerjenost posameznih magnetnih domen, s katerim se spremeni vektor magnetne
polarizacije. Za odpravljanje teh težav, je okrog senzorja nameščeno krmilno navitje. Z
močnim kratkotrajnim impulzom se naključno orientirane domene postavijo vzdolž smeri
senzorja in tako odpravijo nezaželene posledice.
AMR senzor se pojavlja v manjših napravah kjer niso prisotna magnetna polja večjih jakosti.
Največkrat jih najdemo v računalnikih (trdi disk, disketni pogoni). V industrijskih obratih in
postrojih, kot samostojen člen, pa ga srečamo poredkoma, zaradi prisotnosti velikih motenj.
Slika 13: AMR senzor v povezavi z zunanjim magnetom
Takšen senzor je sposoben zagotavljati signal tudi pri zelo nizkih vrtilnih hitrostih, kar je
uporabo pri:
Navigacija avtomobila
ABS
Kontrola menjalnika
Sam izhodni signal senzorja se ne spreminja s spremembo hitrosti, zato se takšni senzorji
praviloma uporabljajo v kontrolnih enotah.

Kos, Kren Vrtilna hitrost MP
14
6. Sklep
Dandanes je na razpolago mnogo načinov kako meriti vrtilno hitrost. Najbolj pomembno je
kakšne so zahteve merjenja in v katerih pogojih bojo naprave obratovale. Na podlagi tega je
izbor senzorjev odvisen tudi od vrtilne hitrosti. Najbolj primerni so Hallov senzor ter
induktivni senzor.
Ti senzorji so namenjeni za obratovanje v težkih temperaturnih pogojih, v prisotnosti
umazanij, hladilnih tekočin in so odporni na morebitne motnje.
Osnovnemu VR senzorju se običajno dodajo dodatna elektronska vezja s katerimi se izhodni
sinusni signal preoblikuje v digitalno obliko, s katerim je prenos oziroma obdelava podatkov
enostavnejša. VR senzor lahko deluje tudi pri temperaturi 300°C ali več, zato se uporablja pri
merjenju hitrosti v turbinah reaktivnega letalskega motorja.
Hallov senzor nam omogoča merjenje malih hitrosti ali celo prepoznavanje prisotnosti telesa.
V večini Hallovih senzorjev se na izhodu oblikuje digitalni signal, ki je kompatibilen z
digitalno logiko ter mikrokontrolerji. Povezava med merilnim delom senzorja in signal-
procesnim delom so zelo kratki. To povzroči, da postane senzor popolnoma nedovzeten za
elektromagnetne motnje, ki bi vplivale na točnost ali povzročale okvaro senzorja. Posebnost
pa je tudi, da delujejo pri temperaturnem razponu med -40°C in 150°C.

Kos, Kren Vrtilna hitrost MP
15
7. Viri in literatura
Vanja Ambrožič, David Nedeljković: UVOD V PROGRAMIRLJIVE
KRMILNE SISTEME, založba FE, Ljubljana 2005
Merjenje vrtilne hitrosti in zasukov, Anže Kumer, Rok Jamnik
Moderno proizvodno inženirstvo-priročnik, Ivan Anžel, založba Grafis Trade
d.o.o.,Ljubljana 2010
http://en.wikipedia.org/wiki/Main_Page
http://slo-tech.com/forum/t127419