rssi-controlledlong-rangecommunicationinsecured iot
TRANSCRIPT
Research ArticleRSSI-Controlled Long-Range Communication in SecuredIoT-Enabled Unmanned Aerial Vehicles
Inam Ullah Khan 1 Ryan Alturki 2 Hasan J Alyamani 3
Mohammed Abdulaziz Ikram 4 Muhammad Adnan Aziz 1 Vinh Truong Hoang 5
and Tanweer Ahmad Cheema 1
1Department of Electronic Engineering School of Engineering and Applied Sciences Isra University Islamabad Pakistan2Department of Information Science College of Computer and Information Systems Umm Al-Qura University MakkahSaudi Arabia3Department of Information Systems Faculty of Computing and Information Technology King Abdulaziz University RabighSaudi Arabia4Computer Science Department University College in Al-Jamoum Umm Al-Qura University Makkah Saudi Arabia5Faculty of Computer Science Ho Chi Minh City Open University Ho Chi Minh city Vietnam
Correspondence should be addressed to Vinh Truong Hoang vinhthoueduvn
Received 6 January 2021 Revised 13 February 2021 Accepted 21 February 2021 Published 1 March 2021
Academic Editor Mian Ahmad Jan
Copyright copy 2021 InamUllah Khan et al+is is an open access article distributed under the Creative CommonsAttribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Unmanned aerial vehicle (UAV) has recently gained significant attention due to their efficient structures cost-effectiveness easyavailability and tendency to form an ad hoc wireless mobile network IoT-enabled UAV is a new research domain that useslocation tracking with the advancement of aerial technology In this context the importance of 3D aerial networks is attracting alot of attention recently It has various applications related to information processing communication and location-basedservices Location identification of wireless nodes is a challenging job and of extreme importance In this study we introduced anovel technique for finding indoor and open-air three-dimensional (3D) areas of nodes by measuring the signal strength +emathematical formulation is based on a path loss model and decision tree machine learning classifier We constructed 2D and 3Dmodels to gather more accurate information on the nodes Simulation findings demonstrate that the proposed machine learning-based model excels in nodes location estimation the actual and estimated distance of different nodes and calculation of receivedsignal strength in aerial ad hoc networks In addition the decision tree constructs an offline phase control in the flying vehiclersquoslocation to enhance the time complexity along with experimental accuracy
1 Introduction
Due to recent advancements in communication and net-working the flying ad hoc network (FANET) is consideredas a more feasible alternative to the wireless sensor network(WSN) To meet growing high-speed networking andcommunication requirements unmanned aerial vehicles arethe optimal choice for communication +ey are used fordifferent cellular network applications such as border sur-veillance search operations crime scene security home-based security emergency assistance and rescue operationsUnmanned aerial vehicles use air-to-air communication(a2a communication) like UAV communicating with other
UAVs and air-to-ground communication (a2g communi-cation) like UAV communicating with the ground basestation Air-to-air communication between different UAVsgenerally requires less energy as compared to air-to-groundcommunication UAVs face different challenges such aslimited power short-communication ranges rapid topo-logical changes low bandwidth and handover
Generally for radio-range transmission communica-tions WLAN orWiFi networking is considered but for longrange communication requirements 802154 is usedWLAN induces heavy overheads due to which it is usuallydiscouraged Single UAV cannot create FANET thereforemultiple UAVrsquos are required and not every UAV needs to be
HindawiMobile Information SystemsVolume 2021 Article ID 5523553 11 pageshttpsdoiorg10115520215523553
connected to the base station UAV does usually have aspeed between 30 and 360 kmh due to which communi-cation problems in multiple unmanned aerial vehicles ariseIn flying ad hoc networks there must be a sparse densitywith a large distance between unmanned aerial vehicleshowever it also depends upon the nature of flying ad hocnetworks +e communication between UAVrsquos can be af-fected due to their high speed changing topology changinglocation connection failure and updated processing neededevery time Localization means selecting the location of eachUAV even at high speed +ere is a need for efficient andaccurate localization within short intervals of time accordingto the high speed
+e weighted centroid algorithm depends upon thebeacon frames sent from nodes +ese nodes are eitherexpressed in 2D or 3D space It is measured through thereceived signal strength identifier (RSSI) for indoor andoutdoor environments +is study presents a novel strategyfor aerial ad hoc networks using the three-dimensionalmeasurement of received signal strength power which showsoptimal outcome in terms of location and the distance ofnodes Calculation of signal strength is performed using alog-normal model Signal strength plays an important rolefrom aerial vehicles to the land station where cyber-securityattacks can be deployed by intruders to overcome and hijackthe network which causes disruption Optimal flying signalstransmission mitigates aerial data congestion which reducesmany problems in smart cities Intelligent signaling systemsdirectly mixup in the field of smart cities which improvedecision making the interaction of information and alsosmart flying things that increase the behavior of humaninteraction energy and context awareness +e main con-tributions of this study are as follows
IoT-based unmanned aerial vehicles are used to im-prove signal strength in smart citiesSecure communication channels in flying ad hocnetworks utilize a two-ray model and centroid algo-rithm for node localizationMachine learning framework decision tree is applied onthe network topology to improve signal strength
Rest of the study is structured with Section 1 whichconsists of introduction while Section 2 is composed of briefliterature having past data about the problem Similarlydetailed classification is incorporated in Section 3 alsoSection 4 represents the proposed model Section 5 dem-onstrates results of the algorithm +e theoretical analysisand future direction is discussed in Section 6 which isexplained in conclusion section
2 Related Survey
In [1] Bilal et al discussed that the hexahedral method isbeing replaced by centroid localization algorithms +eycompared the performance of the proposed approach withmaximum likelihood estimation (MLE) this is furthercompared with the two-dimensional weighted centroid lo-calization algorithm
Syed et al [2] designed a new routing protocol which canselect cluster head (CH) for path planning and intelligentrouting +e protocol design is based on selecting the groupleader in the nodes +e group leader must have somespecific attributes or characteristics +e group leader selectsnodes and senses the environmental changes whereas theOPEN protocol performs better results as compared with thetraditional routing techniques which improve energylifetime
In [3] Liu et al compared optimal ant-based distanceprotocols+e analysis of different protocols is performed byusing primary metrics+ese routing protocols are evaluatedin simulation-based environments rather than real-timescenario In this study almost all of the protocols are basedon transition probability which is pheromone and heuristic-based and the operation level is energy level control anddistance transmission control
Network topology such as flat and hierarchical describesrouting challenges in ant-based protocols +is study alsohighlights the latest developments in this research field Puet al [4] projected a novel idea in this study +e motivationof the study is a result of rapid development in technologysuch as sensors and communications in multisized UAVsleading to flying ad hoc networks Because of the easy de-ployment of nodes and configurations FANET is used inmany applications such as search operations rescue oper-ations and civil family functions Due to high topologicalchanges in communication links failure there is an inten-tional jamming in unmanned aerial vehicles +is work canbe further extended by making a connectivity-based mo-bility model for unmanned aerial vehicles
Qiang et al [5] explained the problem of the singleconnected flying ad hoc network which can be segmentedbecause of the special attributes of unmanned aerial vehicles+ey also described different movements using k hopephysical structure this algorithm is studied in a three-di-mensional FANET in numerical computation using a sim-ulation environment +e proposed algorithm is comparedwith the local and also with the roof of a brief time offsetdistance cascade movement of motes and also maintainingthe original link at the same time
Guillen-Perez and Cano et al [6] came up with a newarea in the network communication that is flying networksin which we find some different attributes from other areas+is study presents brief literature on mobility models offlying ad hoc networks positioning propagating proposedfor FANETs such as path planning +ey used a pure ran-domized structural approach In this study they performedtwo experiments to advance state of the art by measuring thedronesrsquo onboard WiFi radiation patterns To achieve thisexperiment is performed in a controlled environmentDifferent wireless technologies such as WiFi LTE andWiMAX are used +rough these technologies quantifyingthe influence of radiation pattern onboard communicationthe communication is mainly carried out in two-dimen-sional boundary but in the future we can use three-di-mensional boundary for this practical experimentation
Anis and Basit [7] described technical and experimentaldata on Internet of drones +is technology opens a new
2 Mobile Information Systems
horizon on smart tracking of drones through web andandroid-based applications using the robot operating sys-tem +is study explains object tracking through dronesusing Internet Drone tracker uses drone map planner Acloud-based system manages drones over Internet Practicalexperimentation is performed which shows drone trackingsystems with a low speedy destination
In [8] Zhang et al [8] presented radio frequencyidentification for unmanned aerial vehicles that provides 6degrees of freedom +ey attached modern ultrahigh fre-quency tags that are interrogated For this purpose theBayesian algorithm is used +e proposed experimentationwas tested on rich structure for inside environments SVD-based algorithm and Bayesian filter is used and this methodis efficient for different aerial vehicles An unscented Kalmanfiltering mechanism is applied on directional antenna-basedaerial networking to estimate the position of unmannedaerial vehicles [9]
According to the past research we have found that mostof the research work was conducted on wireless sensornetworks based on the two-dimensional centroid localiza-tion algorithm whereas we have seen many limitations inthe work such as calculating range-based methods theavailability of the data on sensorshubs is part of range freecalculation and later the received signal strength power wasintroduced Formulation of signal strength on receivingflying nodes makes use of wireless infrastructure whichenhances the capabilities of line-of-sight in air-2-groundsignals multiplication to maximize the sensor networksAchieving the optimal signal strength directly increasesreceived signal power whereby wireless radio energy of thechannel can uphold the power level in flying ad hoc net-works +e industrial Internet of things is concerned wherecommunication workstation security and reliable datatransmission are the most important factors to safeguard theinformation centers Pervasive edge computing is proposedto secure IIoT [10] However for lightweight mutual au-thentication the client-server model utilizes encryption tosecure sessions among the nodes [11 12] +reat intelligencecan be minimized in dynamic malware analysis using adecision tree to examine behavior and overcome securityrisks [13] In the decentralized web of networks cognitiveradio gives optimal results that employ the hidden Markovmodel to dedicate direct short range communicationchannels for transmission [14 15] Maintain the quality ofservice in multihop communication to detect Sybil attackwhereas for this purpose QoS-aware secure communicationtechnique can be easily deployed using Internet of things-based networks which can be performed on large scale data[16]
3 Detail Classification
31 Aerial Networks Topology construction plays an im-portant role in aerial networks In UAV networks everynode is a nonstatic node and moves in three axes We do astudy on how far is the node from the base station and howfar is the drone away from the cluster head for tacklingthese problems making topology is important Kim [17]
discussed that due to rapid fluctuations in topologicalparameters of futuristic networks UAV networks arepromising technology due to the versatile behavior +isstudy describes the optimization of topological manage-ment to maximize the performance by optimizing thelocation and movements of unmanned aerial vehicles It isachieved by adapting the topological changes while car-rying out UAVrsquos missions +erefore for this purpose twoalgorithms were proposed one for topology constructionbased on swarm optimization and the second one isadjusting topological changes in flying ad hoc networkswhich is based on aerial flying networks Shi et al [18]introduced a new area that is a drone-assisted vehicularnetwork (DAVN) which provides connectivity betweenvehicles and futuristic networks of unmanned aerial ve-hicles In [18] they further discussed a brief architecture ofsoftware define the drone-assisted vehicular network(DAVN) by cooperating with vehicle infrastructure thatcan improve connectivity between drones and vehicles +earchitecture is constructed on a mobile ad hoc network thatincludes static nodes and a remote servernode for com-munication then this process was updated into flying adhoc networks that comprise a base station and drones Apictorial representation of DAVN is presented in Figure 1
32 Localization Localization means to measure the dis-tance between the nodes there are two types of localizationone is indoor localization and the second one is open-airoutdoor localization Yves and Peng [19] in their studydescribed that low cost received signal strength can be foundby simple experimentation of two devices that will beconnected to a database to store the data +e algorithmworks on the location of an unknown mote by using thereceived signal strength indicator (RSSI) with angle-basedlocalization estimation (RALE) RSSI value gets increasedwhen it comes near to hidden workstations which keep awayfrom angle unreliable RSSI +e results obtained after thepractical experiment show that RALE only requires RSSI andthe angles It does not require a complex computationallyexpensive algorithm Furthermore they suggested that thisresearch can be tested on the position and height of the nodeWireless sensor networks mostly work in the bounded areaof communication that forms clusters the tracking of a staticnode or cluster is very easy and these issues can be tackledby dynamic programming As communication advances inmany areas hybridization of many heterogeneous sensornetworks offers low power in high communication net-works Akter et al [20] described the tracking and locali-zation algorithm in wireless sensor networks Due to thedrawbacks in the static clustered routing this research in-crementally updates creates maintenance through onlinelearning and shows us energy-efficient tracking and local-ization in wireless sensor networks Some nodes decreasecomputational complexity calculation and give us properinformation of the coordinate systems Our research studywill make use of signal strength power that shows howmuchis received which will be opposite to the distance betweenunmanned aerial vehicles
Mobile Information Systems 3
33 Localization Strategies and Algorithm As discussed inSection 32 localization is the estimation of the distancefrom one node to another node such as environmentalmonitoring checking animalsrsquo habitat fire surveillancewater quality checking from where the water is comingsearch operations and intrusion detection systems Wirelesssensor localization is the process to estimate the location ofthe sensors having unknown locations time distance angleof arrival and how the motes are connected As far as theglobal positioning system (GPS) is a concern this is veryexpensive to implement in every mote so that is why we gofor the technique of localization Sensor with a known lo-cation of position information is called anchors Range freelocalization includes pattern matching and hop-count-basedlocalization +ere is another branch called targetsourcelocalization which includes single and multiple targetlocalizations
Yu et al [21] in their study introduced two algorithmsthat give us better results to localize a node First error termsof the estimated distance between anchor motes Second theQDV-Hop algorithm minimizes error to obtain optimallocalization Almost both proposed algorithms achievesimilar accuracy by solving unconstrained optimizationissues Later localization can be improved by reducingcomputational complexity while improving accuracy
+e range free estimation can be expressed using cen-troid algorithms DV-Hop and APTI algorithms In Fig-ure 2 we briefly presented localization taxonomy thatcomprises of (i) targetsource localization (ii) distribution(iii) mobility (iv) ranging (v) coordinates and (vi) locationFigure 3 elaborates the classification of node localizationstrategies for wireless technology like 8021 which mainlycovers centralized and distributed localization Distribution
localization techniques further extend to six modules such asbacon based relaxation based coordinate system hybriderror propagation and interferometer ranging Bacon-basedtechniques have three more modes which are diffusiongradient and bounding box +e 2D view of sensor work-stations in flying vehicles gives the flat view where the three-dimensional implication displays a real-time field of visionin the network topology Deep insight idea of the 3D locationwhere flying nodes is having practical applications is uti-lizing sensor nodes Besides working on 3D-based envi-ronments on Internet of drones to improve node localizationis a difficult task Our simulation environment is based on a3D centroid algorithm which will estimate not only nodedistance computation but also signal power between twounmanned aerial vehicles to measure the distance betweenaerial vehicles Figure 2 represents the taxonomy ladder oflocalization where Figure 3 shows wireless sensor com-munication networksrsquo distribution in terms of centralized oreither distributed localization
34 Proposed Model Signal strength power measurementcommonly known as the received signal strength identifier(RSSI) is a technique for calculating the distance betweentwo UAVs or wireless nodes Signal strength varies as thedistance between nodes changes However if you compare itto the real environment the received signal strength indi-cator is highly influenced by environmental noise Gao et al[22] used a two-ray model for their proposed scheme fornode localization +ey tested the proposed technique in therice field With advancements in wireless communicationtechnologies there must be some efficient mathematicalmodels that can be used to improve the accuracy in motes
Satellite
UAVrsquos swarm
Drone
BS
BS
Wireless
link
Figure 1 Drone-assisted vehicular networks
4 Mobile Information Systems
localization algorithms Received signal strength measure-ment is based on distance we applied this technique in thecentroid algorithm for node localization in aerial technol-ogy Figure 4 elaborates the ideal relationship of receivedsignal strength and distance between nodes
RSSI minusk logd + a
d 10(a minus rssi)
k1113890 1113891
(1)
Syed et al [1] discussed that remote signal plays a vitalrole in wireless communication so remote received signalsand motes relationship is given in the following equation
Pr Pt
1d
1113874 1113875 (2)
We must take ten times logarithm on both sides andconvert it into dBm as given in the following equation
PR(dBm) A minus 10n log d (3)
Syed et al [1] further discussed that the above equationsare for urban environments and the equation for receivedsignal strength on the receiver side is given by the followingequation
Pr(dB)PtGtGr lowastht
2hr
2
d41113888 1113889 (4)
+e shadowingmodel using signal strength power can bebriefly explained using the following equation
P(d) P d0( 1113857 minus 10η log 10d
d01113888 1113889 + Xσ (5)
η is the signal attenuation used for some specific envi-ronments even when some obstacles come on the path ofsignal X σ is the Gaussian random variable for smallervalues and larger distances calculation of error for smallvalues of measured signal strength
Localizationtaxonomy
Targetsourcelocalization
Single target inWSN
Multiple targetin WSN
Single targetin WBSN
Multiple targetin WBSN
Centralized Decentralized
Distribution Mobility Ranging
Stationary
Mobile
DV-HOP
APIT
Centroid
Rangefree
Rangebased
AOA
TDOA
RSSI
3D
2D
Reality
Absolute
LocationCoordinates
Figure 2 Localization taxonomy
Localization inwireless sensor networks
Centralizedlocalization
Distributedlocalization
Bacon based
Diffusion Boundingbox
Gradient
Relaxationbased
Coordinatesystem
Hybrid Interferometricranging
Errorpropagation
Figure 3 Classification of localization in wireless sensor networks
Mobile Information Systems 5
d 10 minusP(d) minus P d0( 1113857 minus Xσ( 1113857
10η
d 10 minusP(d) minus P d0( 1113857 + Xσ1( 1113857
10if P(d)geP1
d 10 minusP(d) minus P d0( 1113857 + Xσ2( 1113857
10η2if P(d)ltP1
(6)
In wireless communication using static access pointsindoor localization is having importance through whichaccuracy can be improved Wang et al [23] proposed thataccess point for indoor localization in 2D space is divided byspecial access points+ey suggested that regions are dividedby different locations and the distance of the rank is pro-vided to each region on access point Location sequenced isobtained by using channel status information (CSI) betweenthe access points +is algorithm is compared with thetraditional method ie received signal strength indicator(RSSI) and the simulations results show us accuracy ofabout 2431
35 Wireless Technology Short range communication ismostly used in aerial technology by using ZigBee ZigBee is alow cost easy to configure IEEE 802154-based specification
which is generally used to create personal wireless areanetworks It is used in different applications such as agri-culture smart homes and military Yu et al described 3Dlocalization in [24] It uses a well-known loop invarianttechnique for division with reference to point anchorbounded in an outer side using parameter points known asparametric loop division (PLD) for the measurement ofnoise In Figure 5 we presented a novel technique called thethree-dimensional centroid algorithm and RSSI frameworkin FANETs
PL(dB) 10 log Q
PL(dB) minus10 logR
S1113882 1113883
(7)
Let Gt and Gr unite L does not affect
X2
+ Y2
M2i i 1 2 3
X2
+ Y2
minus M2i 0 If ne 0 then ei
X2i + X
2minus 2XiX0 + Y
2i + Y
2minus 2YiY0 minus M
2i 0
M2i minus X
2i minus Y
2i X
2+ Y
21113872 1113873 minus 2XiX0 minus 2YiY0
(8)
Using the prior n-1 formulas minus n-1th formula
X2i + Y
2i minus X
2minus Y
2minus M
2i + M
2 2X0 Xi minus Xn( 1113857 + 2Y0 Yi minus Y0( 1113857
AX B(9)
Basically A is a tall matrix whose inverse does not existso premultiply with AT
ATAX A
TB (10)
ATA square matrix
Rece
ived
sign
al st
reng
th in
dica
tor (
RSSI
)
Slope = k
A
ndashlog (distance)
Figure 4 Relationship between RSSI and distance
6 Mobile Information Systems
X ATA1113872 1113873
minus1A
TB (11) 4 Mathematical Formulation for Three-
Dimensional (3D) Calculation
X2i + X
20 minus 2XiX0 + Y
2i + Y
20 minus 2YiY0 + Z
2i + Z
20 minus 2ZiZ0 M
2i
X20 + Y
20 + Z
201113872 1113873 minus 2XiX0 minus 2YiY0 minus 2ZiZ0 M
2i minus X
2i minus Y
2i minus Z
2i
(12)
Using the prior (n-1) formula minus the nth formula
X20 + Y
20 + Z
201113872 1113873 minus 2X0 Xi minus Xn( 1113857 minus 2Y0 Yi minus Yn( 1113857 minus 2Z0 Zi minus Zn( 1113857
X2i + Y
2i + Z
2i minus X
2n minus Y
2n minus Z
2n minus M
2i minus M
2n
ATAX A
TB
X ATA1113872 1113873
minus1A
TB
(13)
5 Simulation Results
We used Matlab for the simulation of the proposed modelWe deployed 9 nodes randomly in the topology All thenodes used in the topology are mobile and move in all threeaccess at the same time We constructed two scenarios onefor 2D space and another for 3D Pictorial representation of
2D and 3D topologies are presented in Figures 6 and 7respectively Few important simulation parameters arepresented as follows
(1) Number of nodes 9(2) Calculation method for RSSI log-normal method(3) Path loss for reference distance 55 db
Begin
In FANETS unknown sensor nodes coordinates is set (x y z) for 3D and for 2D (x y) then CLA based on received signal strength
Nodes sending their related information ID position coordinates information into the surrounding nodes
Unknown node receives info need to record info broadcast by the node for several times and calculate RSS
Selection of unknown
nodes
Drive local position for reference node
Obtaining position selecting node
Distance estimation
Polygon is formed by all anchor nodes
Calculate the location of selected unknown node
Any selected ref node without calculation
End
Figure 5 +ree-dimensional centroid algorithm and RSSI framework in FANETS
Mobile Information Systems 7
00
2
2
4
4
6
6
8
8
10X-Axis
Y-A
xis
1
3
5
7
9
10Location estimation 2D
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
a1
a2
a3
a6
a4
a5
a8
a7
a9
Figure 6 9 UAVs deployed randomly in 2D
0
0 0
2
4
6
8
Z-ax
is
Y-axisX-axis
55
10
1010
Location estimation 3D
a1
a2
a3
a6
a4
a5a8
a7
a9
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
Figure 7 UAVs deployed randomly in 3D
8 Mobile Information Systems
(4) Path loss exponent 1(5) Reference distance 1m(6) Noise variance 7(7) Machine learning classifier decision tree(8) Cost function mean square error
Figures 8 and 9 are MATLAB generated results whichshow some parameters such as estimated distance nodeswith signal strength and actual distance among the aerial
vehicles Figure 8 is utilized for 2D and Figure 9 for 3D usingInternet of flying vehicles
Table 1 shows the comparison between the proposedsolution and wireless sensor node localization which rep-resents optimal results by using a decision tree to improvereceive signal strength in the dynamic network +ereforesignal power is improved more while utilizing machinelearning technique as compared with the static nodelocalization
Estimation of 3D location with the decision tree algorithm for flying Ad hoc networks Number of nodes 9 Actual distance from node 1 2828427e + 00 Actual distance from node 2 7280110e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 7071068e + 00 Actual distance from node 5 7071068e + 00 Actual distance from node 6 4690416e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 8774964e + 00 Actual distance from node 9 6557439e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5748455e + 01 Received signal strength from node 2 5337862e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5350515e + 01 Received signal strength from node 5 5350515e + 01 Received signal strength from node 6 5528789e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5256755e + 01 Received signal strength from node 9 5383266e + 01 Estimated distance from node 1 5643454e ndash 01 Estimated distance from node 2 1452573e + 00 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 1410864e + 00 Estimated distance from node 5 1410864e + 00 Estimated distance from node 6 9358610e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1750836e + 00 Estimated distance from node 9 1308381e + 00 Node with good signal strength node 3 Node with good signal strength node 1 Node with good signal strength node 6 Node with good signal strength node 7 Actual location (5 3 1) Estimated location with the decision tree algorithm (5009588e + 00 3019663e + 00 1041434e + 00)
Figure 8 Decision tree for FANETS (3D)
Mobile Information Systems 9
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11

connected to the base station UAV does usually have aspeed between 30 and 360 kmh due to which communi-cation problems in multiple unmanned aerial vehicles ariseIn flying ad hoc networks there must be a sparse densitywith a large distance between unmanned aerial vehicleshowever it also depends upon the nature of flying ad hocnetworks +e communication between UAVrsquos can be af-fected due to their high speed changing topology changinglocation connection failure and updated processing neededevery time Localization means selecting the location of eachUAV even at high speed +ere is a need for efficient andaccurate localization within short intervals of time accordingto the high speed
+e weighted centroid algorithm depends upon thebeacon frames sent from nodes +ese nodes are eitherexpressed in 2D or 3D space It is measured through thereceived signal strength identifier (RSSI) for indoor andoutdoor environments +is study presents a novel strategyfor aerial ad hoc networks using the three-dimensionalmeasurement of received signal strength power which showsoptimal outcome in terms of location and the distance ofnodes Calculation of signal strength is performed using alog-normal model Signal strength plays an important rolefrom aerial vehicles to the land station where cyber-securityattacks can be deployed by intruders to overcome and hijackthe network which causes disruption Optimal flying signalstransmission mitigates aerial data congestion which reducesmany problems in smart cities Intelligent signaling systemsdirectly mixup in the field of smart cities which improvedecision making the interaction of information and alsosmart flying things that increase the behavior of humaninteraction energy and context awareness +e main con-tributions of this study are as follows
IoT-based unmanned aerial vehicles are used to im-prove signal strength in smart citiesSecure communication channels in flying ad hocnetworks utilize a two-ray model and centroid algo-rithm for node localizationMachine learning framework decision tree is applied onthe network topology to improve signal strength
Rest of the study is structured with Section 1 whichconsists of introduction while Section 2 is composed of briefliterature having past data about the problem Similarlydetailed classification is incorporated in Section 3 alsoSection 4 represents the proposed model Section 5 dem-onstrates results of the algorithm +e theoretical analysisand future direction is discussed in Section 6 which isexplained in conclusion section
2 Related Survey
In [1] Bilal et al discussed that the hexahedral method isbeing replaced by centroid localization algorithms +eycompared the performance of the proposed approach withmaximum likelihood estimation (MLE) this is furthercompared with the two-dimensional weighted centroid lo-calization algorithm
Syed et al [2] designed a new routing protocol which canselect cluster head (CH) for path planning and intelligentrouting +e protocol design is based on selecting the groupleader in the nodes +e group leader must have somespecific attributes or characteristics +e group leader selectsnodes and senses the environmental changes whereas theOPEN protocol performs better results as compared with thetraditional routing techniques which improve energylifetime
In [3] Liu et al compared optimal ant-based distanceprotocols+e analysis of different protocols is performed byusing primary metrics+ese routing protocols are evaluatedin simulation-based environments rather than real-timescenario In this study almost all of the protocols are basedon transition probability which is pheromone and heuristic-based and the operation level is energy level control anddistance transmission control
Network topology such as flat and hierarchical describesrouting challenges in ant-based protocols +is study alsohighlights the latest developments in this research field Puet al [4] projected a novel idea in this study +e motivationof the study is a result of rapid development in technologysuch as sensors and communications in multisized UAVsleading to flying ad hoc networks Because of the easy de-ployment of nodes and configurations FANET is used inmany applications such as search operations rescue oper-ations and civil family functions Due to high topologicalchanges in communication links failure there is an inten-tional jamming in unmanned aerial vehicles +is work canbe further extended by making a connectivity-based mo-bility model for unmanned aerial vehicles
Qiang et al [5] explained the problem of the singleconnected flying ad hoc network which can be segmentedbecause of the special attributes of unmanned aerial vehicles+ey also described different movements using k hopephysical structure this algorithm is studied in a three-di-mensional FANET in numerical computation using a sim-ulation environment +e proposed algorithm is comparedwith the local and also with the roof of a brief time offsetdistance cascade movement of motes and also maintainingthe original link at the same time
Guillen-Perez and Cano et al [6] came up with a newarea in the network communication that is flying networksin which we find some different attributes from other areas+is study presents brief literature on mobility models offlying ad hoc networks positioning propagating proposedfor FANETs such as path planning +ey used a pure ran-domized structural approach In this study they performedtwo experiments to advance state of the art by measuring thedronesrsquo onboard WiFi radiation patterns To achieve thisexperiment is performed in a controlled environmentDifferent wireless technologies such as WiFi LTE andWiMAX are used +rough these technologies quantifyingthe influence of radiation pattern onboard communicationthe communication is mainly carried out in two-dimen-sional boundary but in the future we can use three-di-mensional boundary for this practical experimentation
Anis and Basit [7] described technical and experimentaldata on Internet of drones +is technology opens a new
2 Mobile Information Systems
horizon on smart tracking of drones through web andandroid-based applications using the robot operating sys-tem +is study explains object tracking through dronesusing Internet Drone tracker uses drone map planner Acloud-based system manages drones over Internet Practicalexperimentation is performed which shows drone trackingsystems with a low speedy destination
In [8] Zhang et al [8] presented radio frequencyidentification for unmanned aerial vehicles that provides 6degrees of freedom +ey attached modern ultrahigh fre-quency tags that are interrogated For this purpose theBayesian algorithm is used +e proposed experimentationwas tested on rich structure for inside environments SVD-based algorithm and Bayesian filter is used and this methodis efficient for different aerial vehicles An unscented Kalmanfiltering mechanism is applied on directional antenna-basedaerial networking to estimate the position of unmannedaerial vehicles [9]
According to the past research we have found that mostof the research work was conducted on wireless sensornetworks based on the two-dimensional centroid localiza-tion algorithm whereas we have seen many limitations inthe work such as calculating range-based methods theavailability of the data on sensorshubs is part of range freecalculation and later the received signal strength power wasintroduced Formulation of signal strength on receivingflying nodes makes use of wireless infrastructure whichenhances the capabilities of line-of-sight in air-2-groundsignals multiplication to maximize the sensor networksAchieving the optimal signal strength directly increasesreceived signal power whereby wireless radio energy of thechannel can uphold the power level in flying ad hoc net-works +e industrial Internet of things is concerned wherecommunication workstation security and reliable datatransmission are the most important factors to safeguard theinformation centers Pervasive edge computing is proposedto secure IIoT [10] However for lightweight mutual au-thentication the client-server model utilizes encryption tosecure sessions among the nodes [11 12] +reat intelligencecan be minimized in dynamic malware analysis using adecision tree to examine behavior and overcome securityrisks [13] In the decentralized web of networks cognitiveradio gives optimal results that employ the hidden Markovmodel to dedicate direct short range communicationchannels for transmission [14 15] Maintain the quality ofservice in multihop communication to detect Sybil attackwhereas for this purpose QoS-aware secure communicationtechnique can be easily deployed using Internet of things-based networks which can be performed on large scale data[16]
3 Detail Classification
31 Aerial Networks Topology construction plays an im-portant role in aerial networks In UAV networks everynode is a nonstatic node and moves in three axes We do astudy on how far is the node from the base station and howfar is the drone away from the cluster head for tacklingthese problems making topology is important Kim [17]
discussed that due to rapid fluctuations in topologicalparameters of futuristic networks UAV networks arepromising technology due to the versatile behavior +isstudy describes the optimization of topological manage-ment to maximize the performance by optimizing thelocation and movements of unmanned aerial vehicles It isachieved by adapting the topological changes while car-rying out UAVrsquos missions +erefore for this purpose twoalgorithms were proposed one for topology constructionbased on swarm optimization and the second one isadjusting topological changes in flying ad hoc networkswhich is based on aerial flying networks Shi et al [18]introduced a new area that is a drone-assisted vehicularnetwork (DAVN) which provides connectivity betweenvehicles and futuristic networks of unmanned aerial ve-hicles In [18] they further discussed a brief architecture ofsoftware define the drone-assisted vehicular network(DAVN) by cooperating with vehicle infrastructure thatcan improve connectivity between drones and vehicles +earchitecture is constructed on a mobile ad hoc network thatincludes static nodes and a remote servernode for com-munication then this process was updated into flying adhoc networks that comprise a base station and drones Apictorial representation of DAVN is presented in Figure 1
32 Localization Localization means to measure the dis-tance between the nodes there are two types of localizationone is indoor localization and the second one is open-airoutdoor localization Yves and Peng [19] in their studydescribed that low cost received signal strength can be foundby simple experimentation of two devices that will beconnected to a database to store the data +e algorithmworks on the location of an unknown mote by using thereceived signal strength indicator (RSSI) with angle-basedlocalization estimation (RALE) RSSI value gets increasedwhen it comes near to hidden workstations which keep awayfrom angle unreliable RSSI +e results obtained after thepractical experiment show that RALE only requires RSSI andthe angles It does not require a complex computationallyexpensive algorithm Furthermore they suggested that thisresearch can be tested on the position and height of the nodeWireless sensor networks mostly work in the bounded areaof communication that forms clusters the tracking of a staticnode or cluster is very easy and these issues can be tackledby dynamic programming As communication advances inmany areas hybridization of many heterogeneous sensornetworks offers low power in high communication net-works Akter et al [20] described the tracking and locali-zation algorithm in wireless sensor networks Due to thedrawbacks in the static clustered routing this research in-crementally updates creates maintenance through onlinelearning and shows us energy-efficient tracking and local-ization in wireless sensor networks Some nodes decreasecomputational complexity calculation and give us properinformation of the coordinate systems Our research studywill make use of signal strength power that shows howmuchis received which will be opposite to the distance betweenunmanned aerial vehicles
Mobile Information Systems 3
33 Localization Strategies and Algorithm As discussed inSection 32 localization is the estimation of the distancefrom one node to another node such as environmentalmonitoring checking animalsrsquo habitat fire surveillancewater quality checking from where the water is comingsearch operations and intrusion detection systems Wirelesssensor localization is the process to estimate the location ofthe sensors having unknown locations time distance angleof arrival and how the motes are connected As far as theglobal positioning system (GPS) is a concern this is veryexpensive to implement in every mote so that is why we gofor the technique of localization Sensor with a known lo-cation of position information is called anchors Range freelocalization includes pattern matching and hop-count-basedlocalization +ere is another branch called targetsourcelocalization which includes single and multiple targetlocalizations
Yu et al [21] in their study introduced two algorithmsthat give us better results to localize a node First error termsof the estimated distance between anchor motes Second theQDV-Hop algorithm minimizes error to obtain optimallocalization Almost both proposed algorithms achievesimilar accuracy by solving unconstrained optimizationissues Later localization can be improved by reducingcomputational complexity while improving accuracy
+e range free estimation can be expressed using cen-troid algorithms DV-Hop and APTI algorithms In Fig-ure 2 we briefly presented localization taxonomy thatcomprises of (i) targetsource localization (ii) distribution(iii) mobility (iv) ranging (v) coordinates and (vi) locationFigure 3 elaborates the classification of node localizationstrategies for wireless technology like 8021 which mainlycovers centralized and distributed localization Distribution
localization techniques further extend to six modules such asbacon based relaxation based coordinate system hybriderror propagation and interferometer ranging Bacon-basedtechniques have three more modes which are diffusiongradient and bounding box +e 2D view of sensor work-stations in flying vehicles gives the flat view where the three-dimensional implication displays a real-time field of visionin the network topology Deep insight idea of the 3D locationwhere flying nodes is having practical applications is uti-lizing sensor nodes Besides working on 3D-based envi-ronments on Internet of drones to improve node localizationis a difficult task Our simulation environment is based on a3D centroid algorithm which will estimate not only nodedistance computation but also signal power between twounmanned aerial vehicles to measure the distance betweenaerial vehicles Figure 2 represents the taxonomy ladder oflocalization where Figure 3 shows wireless sensor com-munication networksrsquo distribution in terms of centralized oreither distributed localization
34 Proposed Model Signal strength power measurementcommonly known as the received signal strength identifier(RSSI) is a technique for calculating the distance betweentwo UAVs or wireless nodes Signal strength varies as thedistance between nodes changes However if you compare itto the real environment the received signal strength indi-cator is highly influenced by environmental noise Gao et al[22] used a two-ray model for their proposed scheme fornode localization +ey tested the proposed technique in therice field With advancements in wireless communicationtechnologies there must be some efficient mathematicalmodels that can be used to improve the accuracy in motes
Satellite
UAVrsquos swarm
Drone
BS
BS
Wireless
link
Figure 1 Drone-assisted vehicular networks
4 Mobile Information Systems
localization algorithms Received signal strength measure-ment is based on distance we applied this technique in thecentroid algorithm for node localization in aerial technol-ogy Figure 4 elaborates the ideal relationship of receivedsignal strength and distance between nodes
RSSI minusk logd + a
d 10(a minus rssi)
k1113890 1113891
(1)
Syed et al [1] discussed that remote signal plays a vitalrole in wireless communication so remote received signalsand motes relationship is given in the following equation
Pr Pt
1d
1113874 1113875 (2)
We must take ten times logarithm on both sides andconvert it into dBm as given in the following equation
PR(dBm) A minus 10n log d (3)
Syed et al [1] further discussed that the above equationsare for urban environments and the equation for receivedsignal strength on the receiver side is given by the followingequation
Pr(dB)PtGtGr lowastht
2hr
2
d41113888 1113889 (4)
+e shadowingmodel using signal strength power can bebriefly explained using the following equation
P(d) P d0( 1113857 minus 10η log 10d
d01113888 1113889 + Xσ (5)
η is the signal attenuation used for some specific envi-ronments even when some obstacles come on the path ofsignal X σ is the Gaussian random variable for smallervalues and larger distances calculation of error for smallvalues of measured signal strength
Localizationtaxonomy
Targetsourcelocalization
Single target inWSN
Multiple targetin WSN
Single targetin WBSN
Multiple targetin WBSN
Centralized Decentralized
Distribution Mobility Ranging
Stationary
Mobile
DV-HOP
APIT
Centroid
Rangefree
Rangebased
AOA
TDOA
RSSI
3D
2D
Reality
Absolute
LocationCoordinates
Figure 2 Localization taxonomy
Localization inwireless sensor networks
Centralizedlocalization
Distributedlocalization
Bacon based
Diffusion Boundingbox
Gradient
Relaxationbased
Coordinatesystem
Hybrid Interferometricranging
Errorpropagation
Figure 3 Classification of localization in wireless sensor networks
Mobile Information Systems 5
d 10 minusP(d) minus P d0( 1113857 minus Xσ( 1113857
10η
d 10 minusP(d) minus P d0( 1113857 + Xσ1( 1113857
10if P(d)geP1
d 10 minusP(d) minus P d0( 1113857 + Xσ2( 1113857
10η2if P(d)ltP1
(6)
In wireless communication using static access pointsindoor localization is having importance through whichaccuracy can be improved Wang et al [23] proposed thataccess point for indoor localization in 2D space is divided byspecial access points+ey suggested that regions are dividedby different locations and the distance of the rank is pro-vided to each region on access point Location sequenced isobtained by using channel status information (CSI) betweenthe access points +is algorithm is compared with thetraditional method ie received signal strength indicator(RSSI) and the simulations results show us accuracy ofabout 2431
35 Wireless Technology Short range communication ismostly used in aerial technology by using ZigBee ZigBee is alow cost easy to configure IEEE 802154-based specification
which is generally used to create personal wireless areanetworks It is used in different applications such as agri-culture smart homes and military Yu et al described 3Dlocalization in [24] It uses a well-known loop invarianttechnique for division with reference to point anchorbounded in an outer side using parameter points known asparametric loop division (PLD) for the measurement ofnoise In Figure 5 we presented a novel technique called thethree-dimensional centroid algorithm and RSSI frameworkin FANETs
PL(dB) 10 log Q
PL(dB) minus10 logR
S1113882 1113883
(7)
Let Gt and Gr unite L does not affect
X2
+ Y2
M2i i 1 2 3
X2
+ Y2
minus M2i 0 If ne 0 then ei
X2i + X
2minus 2XiX0 + Y
2i + Y
2minus 2YiY0 minus M
2i 0
M2i minus X
2i minus Y
2i X
2+ Y
21113872 1113873 minus 2XiX0 minus 2YiY0
(8)
Using the prior n-1 formulas minus n-1th formula
X2i + Y
2i minus X
2minus Y
2minus M
2i + M
2 2X0 Xi minus Xn( 1113857 + 2Y0 Yi minus Y0( 1113857
AX B(9)
Basically A is a tall matrix whose inverse does not existso premultiply with AT
ATAX A
TB (10)
ATA square matrix
Rece
ived
sign
al st
reng
th in
dica
tor (
RSSI
)
Slope = k
A
ndashlog (distance)
Figure 4 Relationship between RSSI and distance
6 Mobile Information Systems
X ATA1113872 1113873
minus1A
TB (11) 4 Mathematical Formulation for Three-
Dimensional (3D) Calculation
X2i + X
20 minus 2XiX0 + Y
2i + Y
20 minus 2YiY0 + Z
2i + Z
20 minus 2ZiZ0 M
2i
X20 + Y
20 + Z
201113872 1113873 minus 2XiX0 minus 2YiY0 minus 2ZiZ0 M
2i minus X
2i minus Y
2i minus Z
2i
(12)
Using the prior (n-1) formula minus the nth formula
X20 + Y
20 + Z
201113872 1113873 minus 2X0 Xi minus Xn( 1113857 minus 2Y0 Yi minus Yn( 1113857 minus 2Z0 Zi minus Zn( 1113857
X2i + Y
2i + Z
2i minus X
2n minus Y
2n minus Z
2n minus M
2i minus M
2n
ATAX A
TB
X ATA1113872 1113873
minus1A
TB
(13)
5 Simulation Results
We used Matlab for the simulation of the proposed modelWe deployed 9 nodes randomly in the topology All thenodes used in the topology are mobile and move in all threeaccess at the same time We constructed two scenarios onefor 2D space and another for 3D Pictorial representation of
2D and 3D topologies are presented in Figures 6 and 7respectively Few important simulation parameters arepresented as follows
(1) Number of nodes 9(2) Calculation method for RSSI log-normal method(3) Path loss for reference distance 55 db
Begin
In FANETS unknown sensor nodes coordinates is set (x y z) for 3D and for 2D (x y) then CLA based on received signal strength
Nodes sending their related information ID position coordinates information into the surrounding nodes
Unknown node receives info need to record info broadcast by the node for several times and calculate RSS
Selection of unknown
nodes
Drive local position for reference node
Obtaining position selecting node
Distance estimation
Polygon is formed by all anchor nodes
Calculate the location of selected unknown node
Any selected ref node without calculation
End
Figure 5 +ree-dimensional centroid algorithm and RSSI framework in FANETS
Mobile Information Systems 7
00
2
2
4
4
6
6
8
8
10X-Axis
Y-A
xis
1
3
5
7
9
10Location estimation 2D
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
a1
a2
a3
a6
a4
a5
a8
a7
a9
Figure 6 9 UAVs deployed randomly in 2D
0
0 0
2
4
6
8
Z-ax
is
Y-axisX-axis
55
10
1010
Location estimation 3D
a1
a2
a3
a6
a4
a5a8
a7
a9
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
Figure 7 UAVs deployed randomly in 3D
8 Mobile Information Systems
(4) Path loss exponent 1(5) Reference distance 1m(6) Noise variance 7(7) Machine learning classifier decision tree(8) Cost function mean square error
Figures 8 and 9 are MATLAB generated results whichshow some parameters such as estimated distance nodeswith signal strength and actual distance among the aerial
vehicles Figure 8 is utilized for 2D and Figure 9 for 3D usingInternet of flying vehicles
Table 1 shows the comparison between the proposedsolution and wireless sensor node localization which rep-resents optimal results by using a decision tree to improvereceive signal strength in the dynamic network +ereforesignal power is improved more while utilizing machinelearning technique as compared with the static nodelocalization
Estimation of 3D location with the decision tree algorithm for flying Ad hoc networks Number of nodes 9 Actual distance from node 1 2828427e + 00 Actual distance from node 2 7280110e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 7071068e + 00 Actual distance from node 5 7071068e + 00 Actual distance from node 6 4690416e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 8774964e + 00 Actual distance from node 9 6557439e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5748455e + 01 Received signal strength from node 2 5337862e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5350515e + 01 Received signal strength from node 5 5350515e + 01 Received signal strength from node 6 5528789e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5256755e + 01 Received signal strength from node 9 5383266e + 01 Estimated distance from node 1 5643454e ndash 01 Estimated distance from node 2 1452573e + 00 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 1410864e + 00 Estimated distance from node 5 1410864e + 00 Estimated distance from node 6 9358610e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1750836e + 00 Estimated distance from node 9 1308381e + 00 Node with good signal strength node 3 Node with good signal strength node 1 Node with good signal strength node 6 Node with good signal strength node 7 Actual location (5 3 1) Estimated location with the decision tree algorithm (5009588e + 00 3019663e + 00 1041434e + 00)
Figure 8 Decision tree for FANETS (3D)
Mobile Information Systems 9
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11

horizon on smart tracking of drones through web andandroid-based applications using the robot operating sys-tem +is study explains object tracking through dronesusing Internet Drone tracker uses drone map planner Acloud-based system manages drones over Internet Practicalexperimentation is performed which shows drone trackingsystems with a low speedy destination
In [8] Zhang et al [8] presented radio frequencyidentification for unmanned aerial vehicles that provides 6degrees of freedom +ey attached modern ultrahigh fre-quency tags that are interrogated For this purpose theBayesian algorithm is used +e proposed experimentationwas tested on rich structure for inside environments SVD-based algorithm and Bayesian filter is used and this methodis efficient for different aerial vehicles An unscented Kalmanfiltering mechanism is applied on directional antenna-basedaerial networking to estimate the position of unmannedaerial vehicles [9]
According to the past research we have found that mostof the research work was conducted on wireless sensornetworks based on the two-dimensional centroid localiza-tion algorithm whereas we have seen many limitations inthe work such as calculating range-based methods theavailability of the data on sensorshubs is part of range freecalculation and later the received signal strength power wasintroduced Formulation of signal strength on receivingflying nodes makes use of wireless infrastructure whichenhances the capabilities of line-of-sight in air-2-groundsignals multiplication to maximize the sensor networksAchieving the optimal signal strength directly increasesreceived signal power whereby wireless radio energy of thechannel can uphold the power level in flying ad hoc net-works +e industrial Internet of things is concerned wherecommunication workstation security and reliable datatransmission are the most important factors to safeguard theinformation centers Pervasive edge computing is proposedto secure IIoT [10] However for lightweight mutual au-thentication the client-server model utilizes encryption tosecure sessions among the nodes [11 12] +reat intelligencecan be minimized in dynamic malware analysis using adecision tree to examine behavior and overcome securityrisks [13] In the decentralized web of networks cognitiveradio gives optimal results that employ the hidden Markovmodel to dedicate direct short range communicationchannels for transmission [14 15] Maintain the quality ofservice in multihop communication to detect Sybil attackwhereas for this purpose QoS-aware secure communicationtechnique can be easily deployed using Internet of things-based networks which can be performed on large scale data[16]
3 Detail Classification
31 Aerial Networks Topology construction plays an im-portant role in aerial networks In UAV networks everynode is a nonstatic node and moves in three axes We do astudy on how far is the node from the base station and howfar is the drone away from the cluster head for tacklingthese problems making topology is important Kim [17]
discussed that due to rapid fluctuations in topologicalparameters of futuristic networks UAV networks arepromising technology due to the versatile behavior +isstudy describes the optimization of topological manage-ment to maximize the performance by optimizing thelocation and movements of unmanned aerial vehicles It isachieved by adapting the topological changes while car-rying out UAVrsquos missions +erefore for this purpose twoalgorithms were proposed one for topology constructionbased on swarm optimization and the second one isadjusting topological changes in flying ad hoc networkswhich is based on aerial flying networks Shi et al [18]introduced a new area that is a drone-assisted vehicularnetwork (DAVN) which provides connectivity betweenvehicles and futuristic networks of unmanned aerial ve-hicles In [18] they further discussed a brief architecture ofsoftware define the drone-assisted vehicular network(DAVN) by cooperating with vehicle infrastructure thatcan improve connectivity between drones and vehicles +earchitecture is constructed on a mobile ad hoc network thatincludes static nodes and a remote servernode for com-munication then this process was updated into flying adhoc networks that comprise a base station and drones Apictorial representation of DAVN is presented in Figure 1
32 Localization Localization means to measure the dis-tance between the nodes there are two types of localizationone is indoor localization and the second one is open-airoutdoor localization Yves and Peng [19] in their studydescribed that low cost received signal strength can be foundby simple experimentation of two devices that will beconnected to a database to store the data +e algorithmworks on the location of an unknown mote by using thereceived signal strength indicator (RSSI) with angle-basedlocalization estimation (RALE) RSSI value gets increasedwhen it comes near to hidden workstations which keep awayfrom angle unreliable RSSI +e results obtained after thepractical experiment show that RALE only requires RSSI andthe angles It does not require a complex computationallyexpensive algorithm Furthermore they suggested that thisresearch can be tested on the position and height of the nodeWireless sensor networks mostly work in the bounded areaof communication that forms clusters the tracking of a staticnode or cluster is very easy and these issues can be tackledby dynamic programming As communication advances inmany areas hybridization of many heterogeneous sensornetworks offers low power in high communication net-works Akter et al [20] described the tracking and locali-zation algorithm in wireless sensor networks Due to thedrawbacks in the static clustered routing this research in-crementally updates creates maintenance through onlinelearning and shows us energy-efficient tracking and local-ization in wireless sensor networks Some nodes decreasecomputational complexity calculation and give us properinformation of the coordinate systems Our research studywill make use of signal strength power that shows howmuchis received which will be opposite to the distance betweenunmanned aerial vehicles
Mobile Information Systems 3
33 Localization Strategies and Algorithm As discussed inSection 32 localization is the estimation of the distancefrom one node to another node such as environmentalmonitoring checking animalsrsquo habitat fire surveillancewater quality checking from where the water is comingsearch operations and intrusion detection systems Wirelesssensor localization is the process to estimate the location ofthe sensors having unknown locations time distance angleof arrival and how the motes are connected As far as theglobal positioning system (GPS) is a concern this is veryexpensive to implement in every mote so that is why we gofor the technique of localization Sensor with a known lo-cation of position information is called anchors Range freelocalization includes pattern matching and hop-count-basedlocalization +ere is another branch called targetsourcelocalization which includes single and multiple targetlocalizations
Yu et al [21] in their study introduced two algorithmsthat give us better results to localize a node First error termsof the estimated distance between anchor motes Second theQDV-Hop algorithm minimizes error to obtain optimallocalization Almost both proposed algorithms achievesimilar accuracy by solving unconstrained optimizationissues Later localization can be improved by reducingcomputational complexity while improving accuracy
+e range free estimation can be expressed using cen-troid algorithms DV-Hop and APTI algorithms In Fig-ure 2 we briefly presented localization taxonomy thatcomprises of (i) targetsource localization (ii) distribution(iii) mobility (iv) ranging (v) coordinates and (vi) locationFigure 3 elaborates the classification of node localizationstrategies for wireless technology like 8021 which mainlycovers centralized and distributed localization Distribution
localization techniques further extend to six modules such asbacon based relaxation based coordinate system hybriderror propagation and interferometer ranging Bacon-basedtechniques have three more modes which are diffusiongradient and bounding box +e 2D view of sensor work-stations in flying vehicles gives the flat view where the three-dimensional implication displays a real-time field of visionin the network topology Deep insight idea of the 3D locationwhere flying nodes is having practical applications is uti-lizing sensor nodes Besides working on 3D-based envi-ronments on Internet of drones to improve node localizationis a difficult task Our simulation environment is based on a3D centroid algorithm which will estimate not only nodedistance computation but also signal power between twounmanned aerial vehicles to measure the distance betweenaerial vehicles Figure 2 represents the taxonomy ladder oflocalization where Figure 3 shows wireless sensor com-munication networksrsquo distribution in terms of centralized oreither distributed localization
34 Proposed Model Signal strength power measurementcommonly known as the received signal strength identifier(RSSI) is a technique for calculating the distance betweentwo UAVs or wireless nodes Signal strength varies as thedistance between nodes changes However if you compare itto the real environment the received signal strength indi-cator is highly influenced by environmental noise Gao et al[22] used a two-ray model for their proposed scheme fornode localization +ey tested the proposed technique in therice field With advancements in wireless communicationtechnologies there must be some efficient mathematicalmodels that can be used to improve the accuracy in motes
Satellite
UAVrsquos swarm
Drone
BS
BS
Wireless
link
Figure 1 Drone-assisted vehicular networks
4 Mobile Information Systems
localization algorithms Received signal strength measure-ment is based on distance we applied this technique in thecentroid algorithm for node localization in aerial technol-ogy Figure 4 elaborates the ideal relationship of receivedsignal strength and distance between nodes
RSSI minusk logd + a
d 10(a minus rssi)
k1113890 1113891
(1)
Syed et al [1] discussed that remote signal plays a vitalrole in wireless communication so remote received signalsand motes relationship is given in the following equation
Pr Pt
1d
1113874 1113875 (2)
We must take ten times logarithm on both sides andconvert it into dBm as given in the following equation
PR(dBm) A minus 10n log d (3)
Syed et al [1] further discussed that the above equationsare for urban environments and the equation for receivedsignal strength on the receiver side is given by the followingequation
Pr(dB)PtGtGr lowastht
2hr
2
d41113888 1113889 (4)
+e shadowingmodel using signal strength power can bebriefly explained using the following equation
P(d) P d0( 1113857 minus 10η log 10d
d01113888 1113889 + Xσ (5)
η is the signal attenuation used for some specific envi-ronments even when some obstacles come on the path ofsignal X σ is the Gaussian random variable for smallervalues and larger distances calculation of error for smallvalues of measured signal strength
Localizationtaxonomy
Targetsourcelocalization
Single target inWSN
Multiple targetin WSN
Single targetin WBSN
Multiple targetin WBSN
Centralized Decentralized
Distribution Mobility Ranging
Stationary
Mobile
DV-HOP
APIT
Centroid
Rangefree
Rangebased
AOA
TDOA
RSSI
3D
2D
Reality
Absolute
LocationCoordinates
Figure 2 Localization taxonomy
Localization inwireless sensor networks
Centralizedlocalization
Distributedlocalization
Bacon based
Diffusion Boundingbox
Gradient
Relaxationbased
Coordinatesystem
Hybrid Interferometricranging
Errorpropagation
Figure 3 Classification of localization in wireless sensor networks
Mobile Information Systems 5
d 10 minusP(d) minus P d0( 1113857 minus Xσ( 1113857
10η
d 10 minusP(d) minus P d0( 1113857 + Xσ1( 1113857
10if P(d)geP1
d 10 minusP(d) minus P d0( 1113857 + Xσ2( 1113857
10η2if P(d)ltP1
(6)
In wireless communication using static access pointsindoor localization is having importance through whichaccuracy can be improved Wang et al [23] proposed thataccess point for indoor localization in 2D space is divided byspecial access points+ey suggested that regions are dividedby different locations and the distance of the rank is pro-vided to each region on access point Location sequenced isobtained by using channel status information (CSI) betweenthe access points +is algorithm is compared with thetraditional method ie received signal strength indicator(RSSI) and the simulations results show us accuracy ofabout 2431
35 Wireless Technology Short range communication ismostly used in aerial technology by using ZigBee ZigBee is alow cost easy to configure IEEE 802154-based specification
which is generally used to create personal wireless areanetworks It is used in different applications such as agri-culture smart homes and military Yu et al described 3Dlocalization in [24] It uses a well-known loop invarianttechnique for division with reference to point anchorbounded in an outer side using parameter points known asparametric loop division (PLD) for the measurement ofnoise In Figure 5 we presented a novel technique called thethree-dimensional centroid algorithm and RSSI frameworkin FANETs
PL(dB) 10 log Q
PL(dB) minus10 logR
S1113882 1113883
(7)
Let Gt and Gr unite L does not affect
X2
+ Y2
M2i i 1 2 3
X2
+ Y2
minus M2i 0 If ne 0 then ei
X2i + X
2minus 2XiX0 + Y
2i + Y
2minus 2YiY0 minus M
2i 0
M2i minus X
2i minus Y
2i X
2+ Y
21113872 1113873 minus 2XiX0 minus 2YiY0
(8)
Using the prior n-1 formulas minus n-1th formula
X2i + Y
2i minus X
2minus Y
2minus M
2i + M
2 2X0 Xi minus Xn( 1113857 + 2Y0 Yi minus Y0( 1113857
AX B(9)
Basically A is a tall matrix whose inverse does not existso premultiply with AT
ATAX A
TB (10)
ATA square matrix
Rece
ived
sign
al st
reng
th in
dica
tor (
RSSI
)
Slope = k
A
ndashlog (distance)
Figure 4 Relationship between RSSI and distance
6 Mobile Information Systems
X ATA1113872 1113873
minus1A
TB (11) 4 Mathematical Formulation for Three-
Dimensional (3D) Calculation
X2i + X
20 minus 2XiX0 + Y
2i + Y
20 minus 2YiY0 + Z
2i + Z
20 minus 2ZiZ0 M
2i
X20 + Y
20 + Z
201113872 1113873 minus 2XiX0 minus 2YiY0 minus 2ZiZ0 M
2i minus X
2i minus Y
2i minus Z
2i
(12)
Using the prior (n-1) formula minus the nth formula
X20 + Y
20 + Z
201113872 1113873 minus 2X0 Xi minus Xn( 1113857 minus 2Y0 Yi minus Yn( 1113857 minus 2Z0 Zi minus Zn( 1113857
X2i + Y
2i + Z
2i minus X
2n minus Y
2n minus Z
2n minus M
2i minus M
2n
ATAX A
TB
X ATA1113872 1113873
minus1A
TB
(13)
5 Simulation Results
We used Matlab for the simulation of the proposed modelWe deployed 9 nodes randomly in the topology All thenodes used in the topology are mobile and move in all threeaccess at the same time We constructed two scenarios onefor 2D space and another for 3D Pictorial representation of
2D and 3D topologies are presented in Figures 6 and 7respectively Few important simulation parameters arepresented as follows
(1) Number of nodes 9(2) Calculation method for RSSI log-normal method(3) Path loss for reference distance 55 db
Begin
In FANETS unknown sensor nodes coordinates is set (x y z) for 3D and for 2D (x y) then CLA based on received signal strength
Nodes sending their related information ID position coordinates information into the surrounding nodes
Unknown node receives info need to record info broadcast by the node for several times and calculate RSS
Selection of unknown
nodes
Drive local position for reference node
Obtaining position selecting node
Distance estimation
Polygon is formed by all anchor nodes
Calculate the location of selected unknown node
Any selected ref node without calculation
End
Figure 5 +ree-dimensional centroid algorithm and RSSI framework in FANETS
Mobile Information Systems 7
00
2
2
4
4
6
6
8
8
10X-Axis
Y-A
xis
1
3
5
7
9
10Location estimation 2D
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
a1
a2
a3
a6
a4
a5
a8
a7
a9
Figure 6 9 UAVs deployed randomly in 2D
0
0 0
2
4
6
8
Z-ax
is
Y-axisX-axis
55
10
1010
Location estimation 3D
a1
a2
a3
a6
a4
a5a8
a7
a9
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
Figure 7 UAVs deployed randomly in 3D
8 Mobile Information Systems
(4) Path loss exponent 1(5) Reference distance 1m(6) Noise variance 7(7) Machine learning classifier decision tree(8) Cost function mean square error
Figures 8 and 9 are MATLAB generated results whichshow some parameters such as estimated distance nodeswith signal strength and actual distance among the aerial
vehicles Figure 8 is utilized for 2D and Figure 9 for 3D usingInternet of flying vehicles
Table 1 shows the comparison between the proposedsolution and wireless sensor node localization which rep-resents optimal results by using a decision tree to improvereceive signal strength in the dynamic network +ereforesignal power is improved more while utilizing machinelearning technique as compared with the static nodelocalization
Estimation of 3D location with the decision tree algorithm for flying Ad hoc networks Number of nodes 9 Actual distance from node 1 2828427e + 00 Actual distance from node 2 7280110e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 7071068e + 00 Actual distance from node 5 7071068e + 00 Actual distance from node 6 4690416e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 8774964e + 00 Actual distance from node 9 6557439e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5748455e + 01 Received signal strength from node 2 5337862e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5350515e + 01 Received signal strength from node 5 5350515e + 01 Received signal strength from node 6 5528789e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5256755e + 01 Received signal strength from node 9 5383266e + 01 Estimated distance from node 1 5643454e ndash 01 Estimated distance from node 2 1452573e + 00 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 1410864e + 00 Estimated distance from node 5 1410864e + 00 Estimated distance from node 6 9358610e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1750836e + 00 Estimated distance from node 9 1308381e + 00 Node with good signal strength node 3 Node with good signal strength node 1 Node with good signal strength node 6 Node with good signal strength node 7 Actual location (5 3 1) Estimated location with the decision tree algorithm (5009588e + 00 3019663e + 00 1041434e + 00)
Figure 8 Decision tree for FANETS (3D)
Mobile Information Systems 9
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11
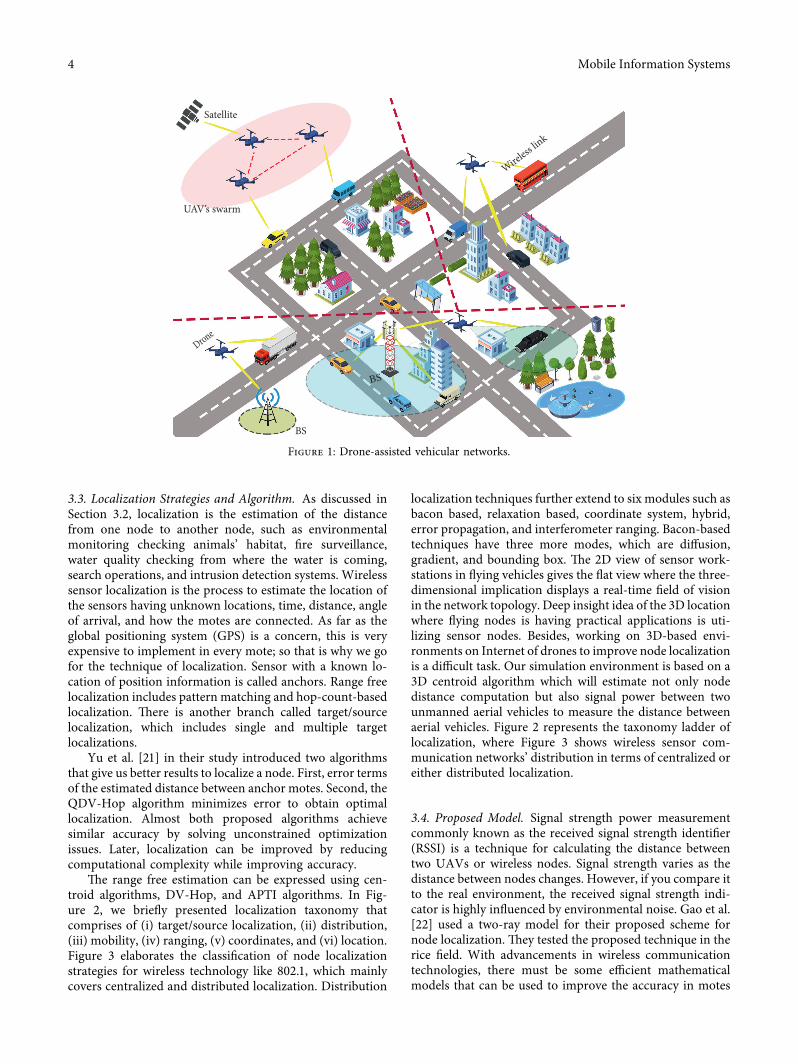
33 Localization Strategies and Algorithm As discussed inSection 32 localization is the estimation of the distancefrom one node to another node such as environmentalmonitoring checking animalsrsquo habitat fire surveillancewater quality checking from where the water is comingsearch operations and intrusion detection systems Wirelesssensor localization is the process to estimate the location ofthe sensors having unknown locations time distance angleof arrival and how the motes are connected As far as theglobal positioning system (GPS) is a concern this is veryexpensive to implement in every mote so that is why we gofor the technique of localization Sensor with a known lo-cation of position information is called anchors Range freelocalization includes pattern matching and hop-count-basedlocalization +ere is another branch called targetsourcelocalization which includes single and multiple targetlocalizations
Yu et al [21] in their study introduced two algorithmsthat give us better results to localize a node First error termsof the estimated distance between anchor motes Second theQDV-Hop algorithm minimizes error to obtain optimallocalization Almost both proposed algorithms achievesimilar accuracy by solving unconstrained optimizationissues Later localization can be improved by reducingcomputational complexity while improving accuracy
+e range free estimation can be expressed using cen-troid algorithms DV-Hop and APTI algorithms In Fig-ure 2 we briefly presented localization taxonomy thatcomprises of (i) targetsource localization (ii) distribution(iii) mobility (iv) ranging (v) coordinates and (vi) locationFigure 3 elaborates the classification of node localizationstrategies for wireless technology like 8021 which mainlycovers centralized and distributed localization Distribution
localization techniques further extend to six modules such asbacon based relaxation based coordinate system hybriderror propagation and interferometer ranging Bacon-basedtechniques have three more modes which are diffusiongradient and bounding box +e 2D view of sensor work-stations in flying vehicles gives the flat view where the three-dimensional implication displays a real-time field of visionin the network topology Deep insight idea of the 3D locationwhere flying nodes is having practical applications is uti-lizing sensor nodes Besides working on 3D-based envi-ronments on Internet of drones to improve node localizationis a difficult task Our simulation environment is based on a3D centroid algorithm which will estimate not only nodedistance computation but also signal power between twounmanned aerial vehicles to measure the distance betweenaerial vehicles Figure 2 represents the taxonomy ladder oflocalization where Figure 3 shows wireless sensor com-munication networksrsquo distribution in terms of centralized oreither distributed localization
34 Proposed Model Signal strength power measurementcommonly known as the received signal strength identifier(RSSI) is a technique for calculating the distance betweentwo UAVs or wireless nodes Signal strength varies as thedistance between nodes changes However if you compare itto the real environment the received signal strength indi-cator is highly influenced by environmental noise Gao et al[22] used a two-ray model for their proposed scheme fornode localization +ey tested the proposed technique in therice field With advancements in wireless communicationtechnologies there must be some efficient mathematicalmodels that can be used to improve the accuracy in motes
Satellite
UAVrsquos swarm
Drone
BS
BS
Wireless
link
Figure 1 Drone-assisted vehicular networks
4 Mobile Information Systems
localization algorithms Received signal strength measure-ment is based on distance we applied this technique in thecentroid algorithm for node localization in aerial technol-ogy Figure 4 elaborates the ideal relationship of receivedsignal strength and distance between nodes
RSSI minusk logd + a
d 10(a minus rssi)
k1113890 1113891
(1)
Syed et al [1] discussed that remote signal plays a vitalrole in wireless communication so remote received signalsand motes relationship is given in the following equation
Pr Pt
1d
1113874 1113875 (2)
We must take ten times logarithm on both sides andconvert it into dBm as given in the following equation
PR(dBm) A minus 10n log d (3)
Syed et al [1] further discussed that the above equationsare for urban environments and the equation for receivedsignal strength on the receiver side is given by the followingequation
Pr(dB)PtGtGr lowastht
2hr
2
d41113888 1113889 (4)
+e shadowingmodel using signal strength power can bebriefly explained using the following equation
P(d) P d0( 1113857 minus 10η log 10d
d01113888 1113889 + Xσ (5)
η is the signal attenuation used for some specific envi-ronments even when some obstacles come on the path ofsignal X σ is the Gaussian random variable for smallervalues and larger distances calculation of error for smallvalues of measured signal strength
Localizationtaxonomy
Targetsourcelocalization
Single target inWSN
Multiple targetin WSN
Single targetin WBSN
Multiple targetin WBSN
Centralized Decentralized
Distribution Mobility Ranging
Stationary
Mobile
DV-HOP
APIT
Centroid
Rangefree
Rangebased
AOA
TDOA
RSSI
3D
2D
Reality
Absolute
LocationCoordinates
Figure 2 Localization taxonomy
Localization inwireless sensor networks
Centralizedlocalization
Distributedlocalization
Bacon based
Diffusion Boundingbox
Gradient
Relaxationbased
Coordinatesystem
Hybrid Interferometricranging
Errorpropagation
Figure 3 Classification of localization in wireless sensor networks
Mobile Information Systems 5
d 10 minusP(d) minus P d0( 1113857 minus Xσ( 1113857
10η
d 10 minusP(d) minus P d0( 1113857 + Xσ1( 1113857
10if P(d)geP1
d 10 minusP(d) minus P d0( 1113857 + Xσ2( 1113857
10η2if P(d)ltP1
(6)
In wireless communication using static access pointsindoor localization is having importance through whichaccuracy can be improved Wang et al [23] proposed thataccess point for indoor localization in 2D space is divided byspecial access points+ey suggested that regions are dividedby different locations and the distance of the rank is pro-vided to each region on access point Location sequenced isobtained by using channel status information (CSI) betweenthe access points +is algorithm is compared with thetraditional method ie received signal strength indicator(RSSI) and the simulations results show us accuracy ofabout 2431
35 Wireless Technology Short range communication ismostly used in aerial technology by using ZigBee ZigBee is alow cost easy to configure IEEE 802154-based specification
which is generally used to create personal wireless areanetworks It is used in different applications such as agri-culture smart homes and military Yu et al described 3Dlocalization in [24] It uses a well-known loop invarianttechnique for division with reference to point anchorbounded in an outer side using parameter points known asparametric loop division (PLD) for the measurement ofnoise In Figure 5 we presented a novel technique called thethree-dimensional centroid algorithm and RSSI frameworkin FANETs
PL(dB) 10 log Q
PL(dB) minus10 logR
S1113882 1113883
(7)
Let Gt and Gr unite L does not affect
X2
+ Y2
M2i i 1 2 3
X2
+ Y2
minus M2i 0 If ne 0 then ei
X2i + X
2minus 2XiX0 + Y
2i + Y
2minus 2YiY0 minus M
2i 0
M2i minus X
2i minus Y
2i X
2+ Y
21113872 1113873 minus 2XiX0 minus 2YiY0
(8)
Using the prior n-1 formulas minus n-1th formula
X2i + Y
2i minus X
2minus Y
2minus M
2i + M
2 2X0 Xi minus Xn( 1113857 + 2Y0 Yi minus Y0( 1113857
AX B(9)
Basically A is a tall matrix whose inverse does not existso premultiply with AT
ATAX A
TB (10)
ATA square matrix
Rece
ived
sign
al st
reng
th in
dica
tor (
RSSI
)
Slope = k
A
ndashlog (distance)
Figure 4 Relationship between RSSI and distance
6 Mobile Information Systems
X ATA1113872 1113873
minus1A
TB (11) 4 Mathematical Formulation for Three-
Dimensional (3D) Calculation
X2i + X
20 minus 2XiX0 + Y
2i + Y
20 minus 2YiY0 + Z
2i + Z
20 minus 2ZiZ0 M
2i
X20 + Y
20 + Z
201113872 1113873 minus 2XiX0 minus 2YiY0 minus 2ZiZ0 M
2i minus X
2i minus Y
2i minus Z
2i
(12)
Using the prior (n-1) formula minus the nth formula
X20 + Y
20 + Z
201113872 1113873 minus 2X0 Xi minus Xn( 1113857 minus 2Y0 Yi minus Yn( 1113857 minus 2Z0 Zi minus Zn( 1113857
X2i + Y
2i + Z
2i minus X
2n minus Y
2n minus Z
2n minus M
2i minus M
2n
ATAX A
TB
X ATA1113872 1113873
minus1A
TB
(13)
5 Simulation Results
We used Matlab for the simulation of the proposed modelWe deployed 9 nodes randomly in the topology All thenodes used in the topology are mobile and move in all threeaccess at the same time We constructed two scenarios onefor 2D space and another for 3D Pictorial representation of
2D and 3D topologies are presented in Figures 6 and 7respectively Few important simulation parameters arepresented as follows
(1) Number of nodes 9(2) Calculation method for RSSI log-normal method(3) Path loss for reference distance 55 db
Begin
In FANETS unknown sensor nodes coordinates is set (x y z) for 3D and for 2D (x y) then CLA based on received signal strength
Nodes sending their related information ID position coordinates information into the surrounding nodes
Unknown node receives info need to record info broadcast by the node for several times and calculate RSS
Selection of unknown
nodes
Drive local position for reference node
Obtaining position selecting node
Distance estimation
Polygon is formed by all anchor nodes
Calculate the location of selected unknown node
Any selected ref node without calculation
End
Figure 5 +ree-dimensional centroid algorithm and RSSI framework in FANETS
Mobile Information Systems 7
00
2
2
4
4
6
6
8
8
10X-Axis
Y-A
xis
1
3
5
7
9
10Location estimation 2D
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
a1
a2
a3
a6
a4
a5
a8
a7
a9
Figure 6 9 UAVs deployed randomly in 2D
0
0 0
2
4
6
8
Z-ax
is
Y-axisX-axis
55
10
1010
Location estimation 3D
a1
a2
a3
a6
a4
a5a8
a7
a9
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
Figure 7 UAVs deployed randomly in 3D
8 Mobile Information Systems
(4) Path loss exponent 1(5) Reference distance 1m(6) Noise variance 7(7) Machine learning classifier decision tree(8) Cost function mean square error
Figures 8 and 9 are MATLAB generated results whichshow some parameters such as estimated distance nodeswith signal strength and actual distance among the aerial
vehicles Figure 8 is utilized for 2D and Figure 9 for 3D usingInternet of flying vehicles
Table 1 shows the comparison between the proposedsolution and wireless sensor node localization which rep-resents optimal results by using a decision tree to improvereceive signal strength in the dynamic network +ereforesignal power is improved more while utilizing machinelearning technique as compared with the static nodelocalization
Estimation of 3D location with the decision tree algorithm for flying Ad hoc networks Number of nodes 9 Actual distance from node 1 2828427e + 00 Actual distance from node 2 7280110e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 7071068e + 00 Actual distance from node 5 7071068e + 00 Actual distance from node 6 4690416e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 8774964e + 00 Actual distance from node 9 6557439e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5748455e + 01 Received signal strength from node 2 5337862e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5350515e + 01 Received signal strength from node 5 5350515e + 01 Received signal strength from node 6 5528789e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5256755e + 01 Received signal strength from node 9 5383266e + 01 Estimated distance from node 1 5643454e ndash 01 Estimated distance from node 2 1452573e + 00 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 1410864e + 00 Estimated distance from node 5 1410864e + 00 Estimated distance from node 6 9358610e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1750836e + 00 Estimated distance from node 9 1308381e + 00 Node with good signal strength node 3 Node with good signal strength node 1 Node with good signal strength node 6 Node with good signal strength node 7 Actual location (5 3 1) Estimated location with the decision tree algorithm (5009588e + 00 3019663e + 00 1041434e + 00)
Figure 8 Decision tree for FANETS (3D)
Mobile Information Systems 9
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11
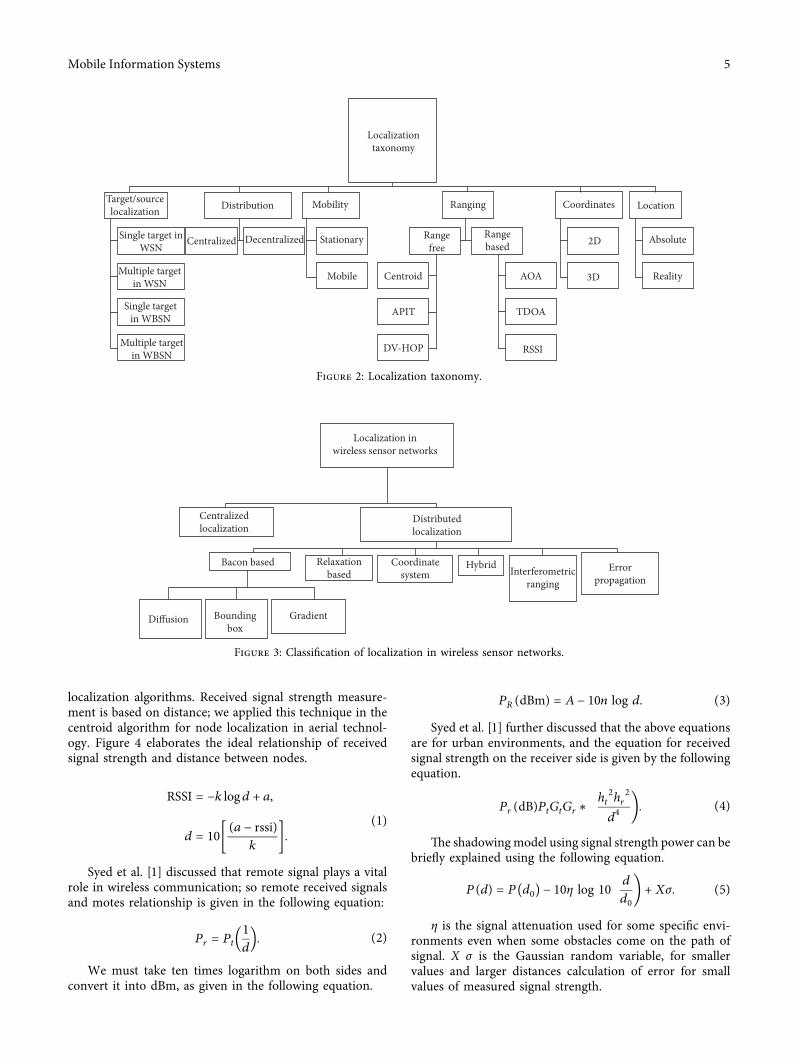
localization algorithms Received signal strength measure-ment is based on distance we applied this technique in thecentroid algorithm for node localization in aerial technol-ogy Figure 4 elaborates the ideal relationship of receivedsignal strength and distance between nodes
RSSI minusk logd + a
d 10(a minus rssi)
k1113890 1113891
(1)
Syed et al [1] discussed that remote signal plays a vitalrole in wireless communication so remote received signalsand motes relationship is given in the following equation
Pr Pt
1d
1113874 1113875 (2)
We must take ten times logarithm on both sides andconvert it into dBm as given in the following equation
PR(dBm) A minus 10n log d (3)
Syed et al [1] further discussed that the above equationsare for urban environments and the equation for receivedsignal strength on the receiver side is given by the followingequation
Pr(dB)PtGtGr lowastht
2hr
2
d41113888 1113889 (4)
+e shadowingmodel using signal strength power can bebriefly explained using the following equation
P(d) P d0( 1113857 minus 10η log 10d
d01113888 1113889 + Xσ (5)
η is the signal attenuation used for some specific envi-ronments even when some obstacles come on the path ofsignal X σ is the Gaussian random variable for smallervalues and larger distances calculation of error for smallvalues of measured signal strength
Localizationtaxonomy
Targetsourcelocalization
Single target inWSN
Multiple targetin WSN
Single targetin WBSN
Multiple targetin WBSN
Centralized Decentralized
Distribution Mobility Ranging
Stationary
Mobile
DV-HOP
APIT
Centroid
Rangefree
Rangebased
AOA
TDOA
RSSI
3D
2D
Reality
Absolute
LocationCoordinates
Figure 2 Localization taxonomy
Localization inwireless sensor networks
Centralizedlocalization
Distributedlocalization
Bacon based
Diffusion Boundingbox
Gradient
Relaxationbased
Coordinatesystem
Hybrid Interferometricranging
Errorpropagation
Figure 3 Classification of localization in wireless sensor networks
Mobile Information Systems 5
d 10 minusP(d) minus P d0( 1113857 minus Xσ( 1113857
10η
d 10 minusP(d) minus P d0( 1113857 + Xσ1( 1113857
10if P(d)geP1
d 10 minusP(d) minus P d0( 1113857 + Xσ2( 1113857
10η2if P(d)ltP1
(6)
In wireless communication using static access pointsindoor localization is having importance through whichaccuracy can be improved Wang et al [23] proposed thataccess point for indoor localization in 2D space is divided byspecial access points+ey suggested that regions are dividedby different locations and the distance of the rank is pro-vided to each region on access point Location sequenced isobtained by using channel status information (CSI) betweenthe access points +is algorithm is compared with thetraditional method ie received signal strength indicator(RSSI) and the simulations results show us accuracy ofabout 2431
35 Wireless Technology Short range communication ismostly used in aerial technology by using ZigBee ZigBee is alow cost easy to configure IEEE 802154-based specification
which is generally used to create personal wireless areanetworks It is used in different applications such as agri-culture smart homes and military Yu et al described 3Dlocalization in [24] It uses a well-known loop invarianttechnique for division with reference to point anchorbounded in an outer side using parameter points known asparametric loop division (PLD) for the measurement ofnoise In Figure 5 we presented a novel technique called thethree-dimensional centroid algorithm and RSSI frameworkin FANETs
PL(dB) 10 log Q
PL(dB) minus10 logR
S1113882 1113883
(7)
Let Gt and Gr unite L does not affect
X2
+ Y2
M2i i 1 2 3
X2
+ Y2
minus M2i 0 If ne 0 then ei
X2i + X
2minus 2XiX0 + Y
2i + Y
2minus 2YiY0 minus M
2i 0
M2i minus X
2i minus Y
2i X
2+ Y
21113872 1113873 minus 2XiX0 minus 2YiY0
(8)
Using the prior n-1 formulas minus n-1th formula
X2i + Y
2i minus X
2minus Y
2minus M
2i + M
2 2X0 Xi minus Xn( 1113857 + 2Y0 Yi minus Y0( 1113857
AX B(9)
Basically A is a tall matrix whose inverse does not existso premultiply with AT
ATAX A
TB (10)
ATA square matrix
Rece
ived
sign
al st
reng
th in
dica
tor (
RSSI
)
Slope = k
A
ndashlog (distance)
Figure 4 Relationship between RSSI and distance
6 Mobile Information Systems
X ATA1113872 1113873
minus1A
TB (11) 4 Mathematical Formulation for Three-
Dimensional (3D) Calculation
X2i + X
20 minus 2XiX0 + Y
2i + Y
20 minus 2YiY0 + Z
2i + Z
20 minus 2ZiZ0 M
2i
X20 + Y
20 + Z
201113872 1113873 minus 2XiX0 minus 2YiY0 minus 2ZiZ0 M
2i minus X
2i minus Y
2i minus Z
2i
(12)
Using the prior (n-1) formula minus the nth formula
X20 + Y
20 + Z
201113872 1113873 minus 2X0 Xi minus Xn( 1113857 minus 2Y0 Yi minus Yn( 1113857 minus 2Z0 Zi minus Zn( 1113857
X2i + Y
2i + Z
2i minus X
2n minus Y
2n minus Z
2n minus M
2i minus M
2n
ATAX A
TB
X ATA1113872 1113873
minus1A
TB
(13)
5 Simulation Results
We used Matlab for the simulation of the proposed modelWe deployed 9 nodes randomly in the topology All thenodes used in the topology are mobile and move in all threeaccess at the same time We constructed two scenarios onefor 2D space and another for 3D Pictorial representation of
2D and 3D topologies are presented in Figures 6 and 7respectively Few important simulation parameters arepresented as follows
(1) Number of nodes 9(2) Calculation method for RSSI log-normal method(3) Path loss for reference distance 55 db
Begin
In FANETS unknown sensor nodes coordinates is set (x y z) for 3D and for 2D (x y) then CLA based on received signal strength
Nodes sending their related information ID position coordinates information into the surrounding nodes
Unknown node receives info need to record info broadcast by the node for several times and calculate RSS
Selection of unknown
nodes
Drive local position for reference node
Obtaining position selecting node
Distance estimation
Polygon is formed by all anchor nodes
Calculate the location of selected unknown node
Any selected ref node without calculation
End
Figure 5 +ree-dimensional centroid algorithm and RSSI framework in FANETS
Mobile Information Systems 7
00
2
2
4
4
6
6
8
8
10X-Axis
Y-A
xis
1
3
5
7
9
10Location estimation 2D
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
a1
a2
a3
a6
a4
a5
a8
a7
a9
Figure 6 9 UAVs deployed randomly in 2D
0
0 0
2
4
6
8
Z-ax
is
Y-axisX-axis
55
10
1010
Location estimation 3D
a1
a2
a3
a6
a4
a5a8
a7
a9
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
Figure 7 UAVs deployed randomly in 3D
8 Mobile Information Systems
(4) Path loss exponent 1(5) Reference distance 1m(6) Noise variance 7(7) Machine learning classifier decision tree(8) Cost function mean square error
Figures 8 and 9 are MATLAB generated results whichshow some parameters such as estimated distance nodeswith signal strength and actual distance among the aerial
vehicles Figure 8 is utilized for 2D and Figure 9 for 3D usingInternet of flying vehicles
Table 1 shows the comparison between the proposedsolution and wireless sensor node localization which rep-resents optimal results by using a decision tree to improvereceive signal strength in the dynamic network +ereforesignal power is improved more while utilizing machinelearning technique as compared with the static nodelocalization
Estimation of 3D location with the decision tree algorithm for flying Ad hoc networks Number of nodes 9 Actual distance from node 1 2828427e + 00 Actual distance from node 2 7280110e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 7071068e + 00 Actual distance from node 5 7071068e + 00 Actual distance from node 6 4690416e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 8774964e + 00 Actual distance from node 9 6557439e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5748455e + 01 Received signal strength from node 2 5337862e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5350515e + 01 Received signal strength from node 5 5350515e + 01 Received signal strength from node 6 5528789e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5256755e + 01 Received signal strength from node 9 5383266e + 01 Estimated distance from node 1 5643454e ndash 01 Estimated distance from node 2 1452573e + 00 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 1410864e + 00 Estimated distance from node 5 1410864e + 00 Estimated distance from node 6 9358610e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1750836e + 00 Estimated distance from node 9 1308381e + 00 Node with good signal strength node 3 Node with good signal strength node 1 Node with good signal strength node 6 Node with good signal strength node 7 Actual location (5 3 1) Estimated location with the decision tree algorithm (5009588e + 00 3019663e + 00 1041434e + 00)
Figure 8 Decision tree for FANETS (3D)
Mobile Information Systems 9
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11

d 10 minusP(d) minus P d0( 1113857 minus Xσ( 1113857
10η
d 10 minusP(d) minus P d0( 1113857 + Xσ1( 1113857
10if P(d)geP1
d 10 minusP(d) minus P d0( 1113857 + Xσ2( 1113857
10η2if P(d)ltP1
(6)
In wireless communication using static access pointsindoor localization is having importance through whichaccuracy can be improved Wang et al [23] proposed thataccess point for indoor localization in 2D space is divided byspecial access points+ey suggested that regions are dividedby different locations and the distance of the rank is pro-vided to each region on access point Location sequenced isobtained by using channel status information (CSI) betweenthe access points +is algorithm is compared with thetraditional method ie received signal strength indicator(RSSI) and the simulations results show us accuracy ofabout 2431
35 Wireless Technology Short range communication ismostly used in aerial technology by using ZigBee ZigBee is alow cost easy to configure IEEE 802154-based specification
which is generally used to create personal wireless areanetworks It is used in different applications such as agri-culture smart homes and military Yu et al described 3Dlocalization in [24] It uses a well-known loop invarianttechnique for division with reference to point anchorbounded in an outer side using parameter points known asparametric loop division (PLD) for the measurement ofnoise In Figure 5 we presented a novel technique called thethree-dimensional centroid algorithm and RSSI frameworkin FANETs
PL(dB) 10 log Q
PL(dB) minus10 logR
S1113882 1113883
(7)
Let Gt and Gr unite L does not affect
X2
+ Y2
M2i i 1 2 3
X2
+ Y2
minus M2i 0 If ne 0 then ei
X2i + X
2minus 2XiX0 + Y
2i + Y
2minus 2YiY0 minus M
2i 0
M2i minus X
2i minus Y
2i X
2+ Y
21113872 1113873 minus 2XiX0 minus 2YiY0
(8)
Using the prior n-1 formulas minus n-1th formula
X2i + Y
2i minus X
2minus Y
2minus M
2i + M
2 2X0 Xi minus Xn( 1113857 + 2Y0 Yi minus Y0( 1113857
AX B(9)
Basically A is a tall matrix whose inverse does not existso premultiply with AT
ATAX A
TB (10)
ATA square matrix
Rece
ived
sign
al st
reng
th in
dica
tor (
RSSI
)
Slope = k
A
ndashlog (distance)
Figure 4 Relationship between RSSI and distance
6 Mobile Information Systems
X ATA1113872 1113873
minus1A
TB (11) 4 Mathematical Formulation for Three-
Dimensional (3D) Calculation
X2i + X
20 minus 2XiX0 + Y
2i + Y
20 minus 2YiY0 + Z
2i + Z
20 minus 2ZiZ0 M
2i
X20 + Y
20 + Z
201113872 1113873 minus 2XiX0 minus 2YiY0 minus 2ZiZ0 M
2i minus X
2i minus Y
2i minus Z
2i
(12)
Using the prior (n-1) formula minus the nth formula
X20 + Y
20 + Z
201113872 1113873 minus 2X0 Xi minus Xn( 1113857 minus 2Y0 Yi minus Yn( 1113857 minus 2Z0 Zi minus Zn( 1113857
X2i + Y
2i + Z
2i minus X
2n minus Y
2n minus Z
2n minus M
2i minus M
2n
ATAX A
TB
X ATA1113872 1113873
minus1A
TB
(13)
5 Simulation Results
We used Matlab for the simulation of the proposed modelWe deployed 9 nodes randomly in the topology All thenodes used in the topology are mobile and move in all threeaccess at the same time We constructed two scenarios onefor 2D space and another for 3D Pictorial representation of
2D and 3D topologies are presented in Figures 6 and 7respectively Few important simulation parameters arepresented as follows
(1) Number of nodes 9(2) Calculation method for RSSI log-normal method(3) Path loss for reference distance 55 db
Begin
In FANETS unknown sensor nodes coordinates is set (x y z) for 3D and for 2D (x y) then CLA based on received signal strength
Nodes sending their related information ID position coordinates information into the surrounding nodes
Unknown node receives info need to record info broadcast by the node for several times and calculate RSS
Selection of unknown
nodes
Drive local position for reference node
Obtaining position selecting node
Distance estimation
Polygon is formed by all anchor nodes
Calculate the location of selected unknown node
Any selected ref node without calculation
End
Figure 5 +ree-dimensional centroid algorithm and RSSI framework in FANETS
Mobile Information Systems 7
00
2
2
4
4
6
6
8
8
10X-Axis
Y-A
xis
1
3
5
7
9
10Location estimation 2D
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
a1
a2
a3
a6
a4
a5
a8
a7
a9
Figure 6 9 UAVs deployed randomly in 2D
0
0 0
2
4
6
8
Z-ax
is
Y-axisX-axis
55
10
1010
Location estimation 3D
a1
a2
a3
a6
a4
a5a8
a7
a9
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
Figure 7 UAVs deployed randomly in 3D
8 Mobile Information Systems
(4) Path loss exponent 1(5) Reference distance 1m(6) Noise variance 7(7) Machine learning classifier decision tree(8) Cost function mean square error
Figures 8 and 9 are MATLAB generated results whichshow some parameters such as estimated distance nodeswith signal strength and actual distance among the aerial
vehicles Figure 8 is utilized for 2D and Figure 9 for 3D usingInternet of flying vehicles
Table 1 shows the comparison between the proposedsolution and wireless sensor node localization which rep-resents optimal results by using a decision tree to improvereceive signal strength in the dynamic network +ereforesignal power is improved more while utilizing machinelearning technique as compared with the static nodelocalization
Estimation of 3D location with the decision tree algorithm for flying Ad hoc networks Number of nodes 9 Actual distance from node 1 2828427e + 00 Actual distance from node 2 7280110e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 7071068e + 00 Actual distance from node 5 7071068e + 00 Actual distance from node 6 4690416e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 8774964e + 00 Actual distance from node 9 6557439e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5748455e + 01 Received signal strength from node 2 5337862e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5350515e + 01 Received signal strength from node 5 5350515e + 01 Received signal strength from node 6 5528789e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5256755e + 01 Received signal strength from node 9 5383266e + 01 Estimated distance from node 1 5643454e ndash 01 Estimated distance from node 2 1452573e + 00 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 1410864e + 00 Estimated distance from node 5 1410864e + 00 Estimated distance from node 6 9358610e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1750836e + 00 Estimated distance from node 9 1308381e + 00 Node with good signal strength node 3 Node with good signal strength node 1 Node with good signal strength node 6 Node with good signal strength node 7 Actual location (5 3 1) Estimated location with the decision tree algorithm (5009588e + 00 3019663e + 00 1041434e + 00)
Figure 8 Decision tree for FANETS (3D)
Mobile Information Systems 9
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11
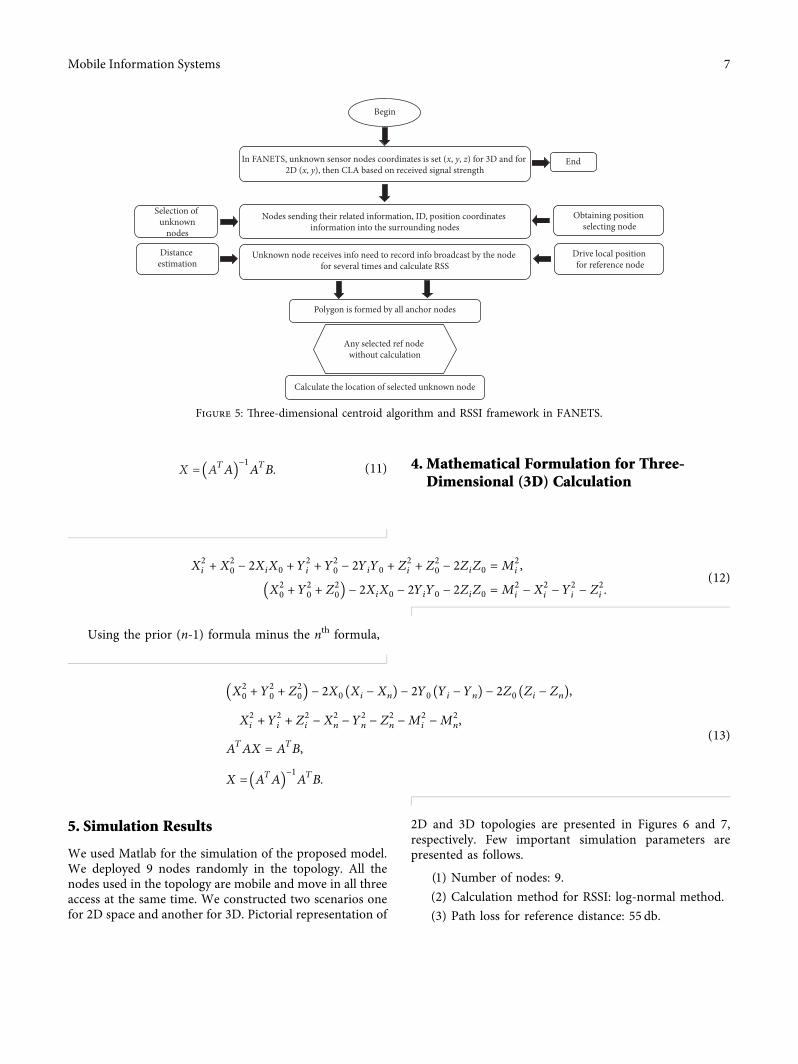
X ATA1113872 1113873
minus1A
TB (11) 4 Mathematical Formulation for Three-
Dimensional (3D) Calculation
X2i + X
20 minus 2XiX0 + Y
2i + Y
20 minus 2YiY0 + Z
2i + Z
20 minus 2ZiZ0 M
2i
X20 + Y
20 + Z
201113872 1113873 minus 2XiX0 minus 2YiY0 minus 2ZiZ0 M
2i minus X
2i minus Y
2i minus Z
2i
(12)
Using the prior (n-1) formula minus the nth formula
X20 + Y
20 + Z
201113872 1113873 minus 2X0 Xi minus Xn( 1113857 minus 2Y0 Yi minus Yn( 1113857 minus 2Z0 Zi minus Zn( 1113857
X2i + Y
2i + Z
2i minus X
2n minus Y
2n minus Z
2n minus M
2i minus M
2n
ATAX A
TB
X ATA1113872 1113873
minus1A
TB
(13)
5 Simulation Results
We used Matlab for the simulation of the proposed modelWe deployed 9 nodes randomly in the topology All thenodes used in the topology are mobile and move in all threeaccess at the same time We constructed two scenarios onefor 2D space and another for 3D Pictorial representation of
2D and 3D topologies are presented in Figures 6 and 7respectively Few important simulation parameters arepresented as follows
(1) Number of nodes 9(2) Calculation method for RSSI log-normal method(3) Path loss for reference distance 55 db
Begin
In FANETS unknown sensor nodes coordinates is set (x y z) for 3D and for 2D (x y) then CLA based on received signal strength
Nodes sending their related information ID position coordinates information into the surrounding nodes
Unknown node receives info need to record info broadcast by the node for several times and calculate RSS
Selection of unknown
nodes
Drive local position for reference node
Obtaining position selecting node
Distance estimation
Polygon is formed by all anchor nodes
Calculate the location of selected unknown node
Any selected ref node without calculation
End
Figure 5 +ree-dimensional centroid algorithm and RSSI framework in FANETS
Mobile Information Systems 7
00
2
2
4
4
6
6
8
8
10X-Axis
Y-A
xis
1
3
5
7
9
10Location estimation 2D
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
a1
a2
a3
a6
a4
a5
a8
a7
a9
Figure 6 9 UAVs deployed randomly in 2D
0
0 0
2
4
6
8
Z-ax
is
Y-axisX-axis
55
10
1010
Location estimation 3D
a1
a2
a3
a6
a4
a5a8
a7
a9
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
Figure 7 UAVs deployed randomly in 3D
8 Mobile Information Systems
(4) Path loss exponent 1(5) Reference distance 1m(6) Noise variance 7(7) Machine learning classifier decision tree(8) Cost function mean square error
Figures 8 and 9 are MATLAB generated results whichshow some parameters such as estimated distance nodeswith signal strength and actual distance among the aerial
vehicles Figure 8 is utilized for 2D and Figure 9 for 3D usingInternet of flying vehicles
Table 1 shows the comparison between the proposedsolution and wireless sensor node localization which rep-resents optimal results by using a decision tree to improvereceive signal strength in the dynamic network +ereforesignal power is improved more while utilizing machinelearning technique as compared with the static nodelocalization
Estimation of 3D location with the decision tree algorithm for flying Ad hoc networks Number of nodes 9 Actual distance from node 1 2828427e + 00 Actual distance from node 2 7280110e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 7071068e + 00 Actual distance from node 5 7071068e + 00 Actual distance from node 6 4690416e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 8774964e + 00 Actual distance from node 9 6557439e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5748455e + 01 Received signal strength from node 2 5337862e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5350515e + 01 Received signal strength from node 5 5350515e + 01 Received signal strength from node 6 5528789e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5256755e + 01 Received signal strength from node 9 5383266e + 01 Estimated distance from node 1 5643454e ndash 01 Estimated distance from node 2 1452573e + 00 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 1410864e + 00 Estimated distance from node 5 1410864e + 00 Estimated distance from node 6 9358610e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1750836e + 00 Estimated distance from node 9 1308381e + 00 Node with good signal strength node 3 Node with good signal strength node 1 Node with good signal strength node 6 Node with good signal strength node 7 Actual location (5 3 1) Estimated location with the decision tree algorithm (5009588e + 00 3019663e + 00 1041434e + 00)
Figure 8 Decision tree for FANETS (3D)
Mobile Information Systems 9
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11
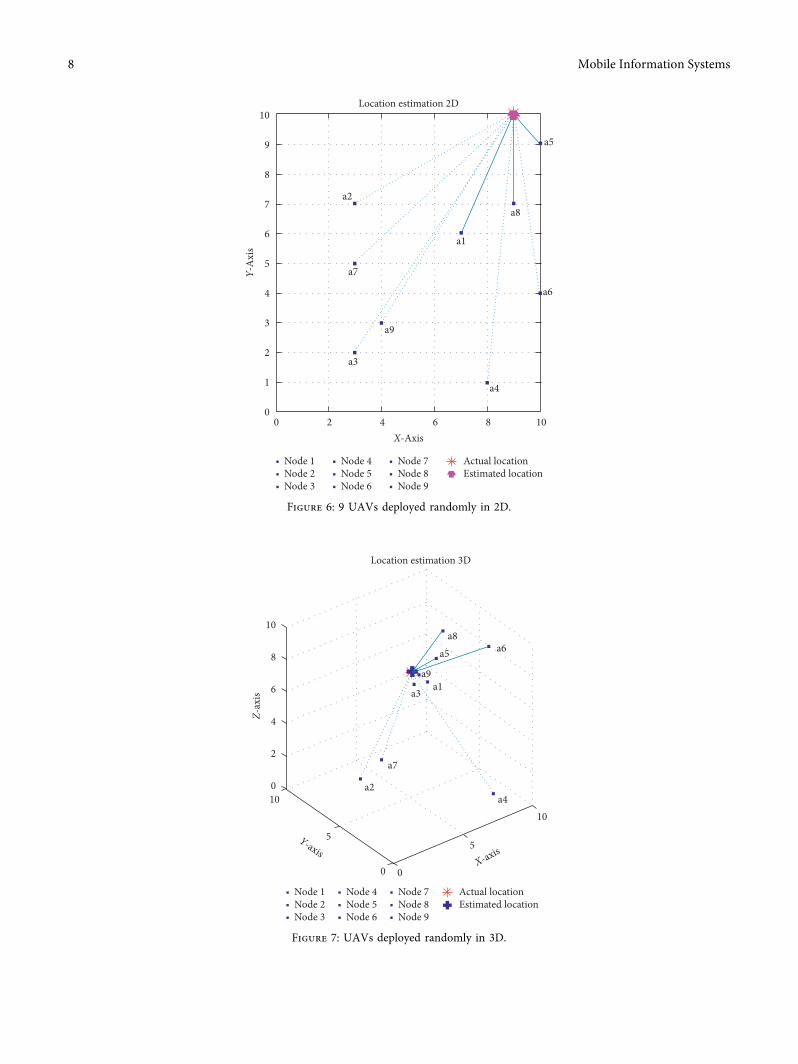
00
2
2
4
4
6
6
8
8
10X-Axis
Y-A
xis
1
3
5
7
9
10Location estimation 2D
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
a1
a2
a3
a6
a4
a5
a8
a7
a9
Figure 6 9 UAVs deployed randomly in 2D
0
0 0
2
4
6
8
Z-ax
is
Y-axisX-axis
55
10
1010
Location estimation 3D
a1
a2
a3
a6
a4
a5a8
a7
a9
Node 4Node 5Node 6
Node 7Node 8Node 9
Node 2Node 3
Node 1 Actual locationEstimated location
Figure 7 UAVs deployed randomly in 3D
8 Mobile Information Systems
(4) Path loss exponent 1(5) Reference distance 1m(6) Noise variance 7(7) Machine learning classifier decision tree(8) Cost function mean square error
Figures 8 and 9 are MATLAB generated results whichshow some parameters such as estimated distance nodeswith signal strength and actual distance among the aerial
vehicles Figure 8 is utilized for 2D and Figure 9 for 3D usingInternet of flying vehicles
Table 1 shows the comparison between the proposedsolution and wireless sensor node localization which rep-resents optimal results by using a decision tree to improvereceive signal strength in the dynamic network +ereforesignal power is improved more while utilizing machinelearning technique as compared with the static nodelocalization
Estimation of 3D location with the decision tree algorithm for flying Ad hoc networks Number of nodes 9 Actual distance from node 1 2828427e + 00 Actual distance from node 2 7280110e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 7071068e + 00 Actual distance from node 5 7071068e + 00 Actual distance from node 6 4690416e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 8774964e + 00 Actual distance from node 9 6557439e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5748455e + 01 Received signal strength from node 2 5337862e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5350515e + 01 Received signal strength from node 5 5350515e + 01 Received signal strength from node 6 5528789e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5256755e + 01 Received signal strength from node 9 5383266e + 01 Estimated distance from node 1 5643454e ndash 01 Estimated distance from node 2 1452573e + 00 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 1410864e + 00 Estimated distance from node 5 1410864e + 00 Estimated distance from node 6 9358610e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1750836e + 00 Estimated distance from node 9 1308381e + 00 Node with good signal strength node 3 Node with good signal strength node 1 Node with good signal strength node 6 Node with good signal strength node 7 Actual location (5 3 1) Estimated location with the decision tree algorithm (5009588e + 00 3019663e + 00 1041434e + 00)
Figure 8 Decision tree for FANETS (3D)
Mobile Information Systems 9
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11
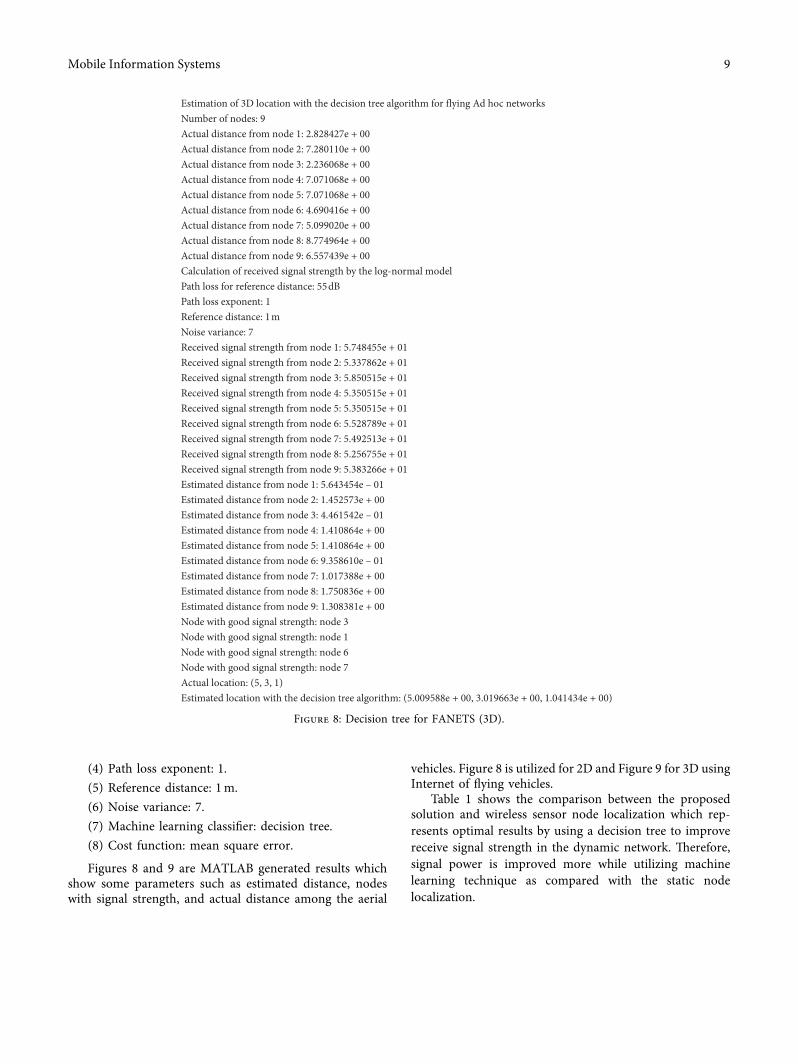
(4) Path loss exponent 1(5) Reference distance 1m(6) Noise variance 7(7) Machine learning classifier decision tree(8) Cost function mean square error
Figures 8 and 9 are MATLAB generated results whichshow some parameters such as estimated distance nodeswith signal strength and actual distance among the aerial
vehicles Figure 8 is utilized for 2D and Figure 9 for 3D usingInternet of flying vehicles
Table 1 shows the comparison between the proposedsolution and wireless sensor node localization which rep-resents optimal results by using a decision tree to improvereceive signal strength in the dynamic network +ereforesignal power is improved more while utilizing machinelearning technique as compared with the static nodelocalization
Estimation of 3D location with the decision tree algorithm for flying Ad hoc networks Number of nodes 9 Actual distance from node 1 2828427e + 00 Actual distance from node 2 7280110e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 7071068e + 00 Actual distance from node 5 7071068e + 00 Actual distance from node 6 4690416e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 8774964e + 00 Actual distance from node 9 6557439e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5748455e + 01 Received signal strength from node 2 5337862e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5350515e + 01 Received signal strength from node 5 5350515e + 01 Received signal strength from node 6 5528789e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5256755e + 01 Received signal strength from node 9 5383266e + 01 Estimated distance from node 1 5643454e ndash 01 Estimated distance from node 2 1452573e + 00 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 1410864e + 00 Estimated distance from node 5 1410864e + 00 Estimated distance from node 6 9358610e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1750836e + 00 Estimated distance from node 9 1308381e + 00 Node with good signal strength node 3 Node with good signal strength node 1 Node with good signal strength node 6 Node with good signal strength node 7 Actual location (5 3 1) Estimated location with the decision tree algorithm (5009588e + 00 3019663e + 00 1041434e + 00)
Figure 8 Decision tree for FANETS (3D)
Mobile Information Systems 9
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11
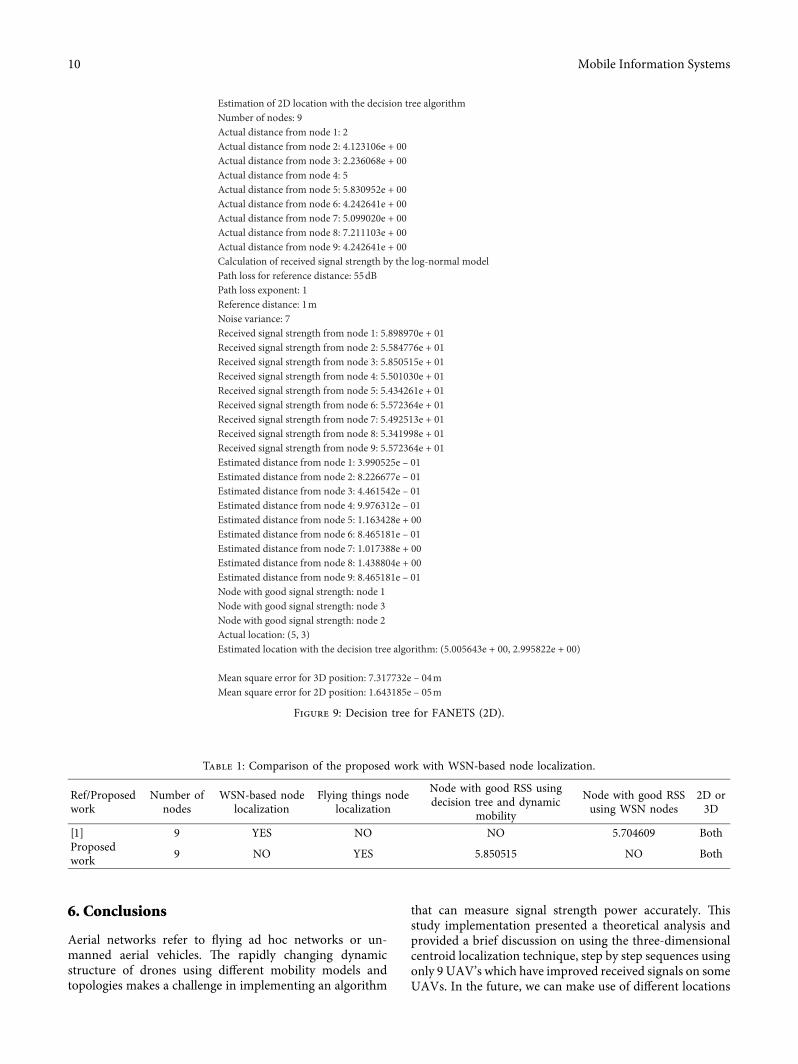
6 Conclusions
Aerial networks refer to flying ad hoc networks or un-manned aerial vehicles +e rapidly changing dynamicstructure of drones using different mobility models andtopologies makes a challenge in implementing an algorithm
that can measure signal strength power accurately +isstudy implementation presented a theoretical analysis andprovided a brief discussion on using the three-dimensionalcentroid localization technique step by step sequences usingonly 9 UAVrsquos which have improved received signals on someUAVs In the future we can make use of different locations
Estimation of 2D location with the decision tree algorithm Number of nodes 9 Actual distance from node 1 2 Actual distance from node 2 4123106e + 00 Actual distance from node 3 2236068e + 00 Actual distance from node 4 5 Actual distance from node 5 5830952e + 00 Actual distance from node 6 4242641e + 00 Actual distance from node 7 5099020e + 00 Actual distance from node 8 7211103e + 00 Actual distance from node 9 4242641e + 00 Calculation of received signal strength by the log‐normal model Path loss for reference distance 55dB Path loss exponent 1 Reference distance 1m Noise variance 7 Received signal strength from node 1 5898970e + 01 Received signal strength from node 2 5584776e + 01 Received signal strength from node 3 5850515e + 01 Received signal strength from node 4 5501030e + 01 Received signal strength from node 5 5434261e + 01 Received signal strength from node 6 5572364e + 01 Received signal strength from node 7 5492513e + 01 Received signal strength from node 8 5341998e + 01 Received signal strength from node 9 5572364e + 01 Estimated distance from node 1 3990525e ndash 01 Estimated distance from node 2 8226677e ndash 01 Estimated distance from node 3 4461542e ndash 01 Estimated distance from node 4 9976312e ndash 01 Estimated distance from node 5 1163428e + 00 Estimated distance from node 6 8465181e ndash 01 Estimated distance from node 7 1017388e + 00 Estimated distance from node 8 1438804e + 00 Estimated distance from node 9 8465181e ndash 01 Node with good signal strength node 1 Node with good signal strength node 3 Node with good signal strength node 2 Actual location (5 3) Estimated location with the decision tree algorithm (5005643e + 00 2995822e + 00)
Mean square error for 3D position 7317732e ndash 04m Mean square error for 2D position 1643185e ndash 05m
Figure 9 Decision tree for FANETS (2D)
Table 1 Comparison of the proposed work with WSN-based node localization
RefProposedwork
Number ofnodes
WSN-based nodelocalization
Flying things nodelocalization
Node with good RSS usingdecision tree and dynamic
mobility
Node with good RSSusing WSN nodes
2D or3D
[1] 9 YES NO NO 5704609 BothProposedwork 9 NO YES 5850515 NO Both
10 Mobile Information Systems
on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11

on using distinct topological arrangements in aerial vehiclesSimulation results show that our decision tree-based modelhas shown good potential to address this problem
Data Availability
+is research is based on simulations which are performedin a simulator +erefore there is no dataset used in thisresearch
Conflicts of Interest
+e authors declare that they have no conflicts of interest
References
[1] B S Syed Z Chen F Yin et al ldquo3D weighted centroid al-gorithm amp RSSI ranging model strategy for node localizationin WSN based on smart devicesrdquo Sustainable cities and So-ciety vol 39 pp 298ndash308 2018
[2] B H S Syed Z Chen and Y Fuliang ldquoOPEN optimized pathplanning algorithm with energy efficiency and extendingnetworkminuslifetime in WSNrdquo Journal of Computing and In-formation Technology vol 25 no 1 pp 1ndash14 2017
[3] X Liu ldquoRouting protocols based on ant colony optimizationin wireless sensor networks a surveyrdquo Institute of Electricaland Electronics Engineers Access vol 5 pp 26303ndash263172017
[4] C Pu ldquoJamming-resilient multipath routing protocol forflying ad hoc networksrdquo Institute of Electrical and ElectronicsEngineers Access vol 6 pp 2169ndash3536 2018
[5] Q Guo J Yan andW Xu ldquoLocalized fault tolerant algorithmbased on node movement freedom degree in flying ad hocnetworksrdquo Symmetry vol 11 no 1 p 106 2019
[6] A Guillen-Perez and M-D Cano ldquoFlying AD HOC net-works a new domain for network communicationsrdquo Sensorsvol 18 no 10 p 3571 2018
[7] K Anis and Q Basit ldquoDronetrack cloud-based real-timeobject tracking using unmanned aerial vehicles over the in-ternetrdquo Institute of Electrical and Electronics Engineers Accessvol 6 pp 13810ndash13824 2018
[8] J Zhang X Wang Z Yu et al ldquoRobust RFID based 6-DoFlocalization for unmanned aerial vehiclesrdquo Institute of Elec-trical and Electronics Engineers Access vol 7 pp 77348ndash77361 2019
[9] J Yan H Zhao X Luo C Chen and X Guan ldquoRSSI-basedheading control for robust long-range aerial communicationin UAV networksrdquo Institute of Electrical and ElectronicsEngineers Internet of 8ings Journal vol 6 no 2 pp 1675ndash1689 2019
[10] F Khan M A Jan A U Rehman S Mastorakis M Alazaband P Watters ldquoA secured and intelligent communicationscheme for IIoT-enabled pervasive edge computingrdquo Instituteof Electrical and Electronics Engineers Transactions on In-dustrial Informatics vol 2020 2020
[11] M A Jan F Khan R Khan et al ldquoA lightweight mutualauthentication and privacy-preservation scheme for intelli-gent wearable devices in industrial-CPSrdquo Institute of Electricaland Electronics Engineers Transactions on Industrial Infor-matics vol 2020 2020
[12] J Li J Cai F Khan et al ldquoA secured framework for sdn-basededge computing in IOT-enabled healthcare systemrdquo Institute
of Electrical and Electronics Engineers Access vol 8pp 135479ndash135490 2020
[13] N Usman S Usman F Khan et al ldquoIntelligent dynamicmalware detection using machine learning in IP reputationfor forensics data analyticsrdquo Future Generation ComputerSystems vol 118 p 124 2021
[14] W Yao A Yahya F Khan et al ldquoA secured and efficientcommunication scheme for decentralized cognitive radio-based internet of vehiclesrdquo Institute of Electrical and Elec-tronics Engineers Access vol 7 pp 160889ndash160900 2019
[15] F Khan A Rehman and M Ahmad Jan ldquoA secured andreliable communication scheme in cognitive hybrid ARQ-aided smart cityrdquo Computers amp Electrical Engineering vol 812020
[16] F Khan A U Rehman A Yahya et al ldquoA quality of service-aware secured communication scheme for internet of things-based networksrdquo Sensors vol 19 no 19 p 4321 2019
[17] D -Y Kim and J -W Lee ldquoIntegrated topology managementin flying ad hoc networks topology construction and ad-justmentrdquo Institute of Electrical and Electronics EngineersAccess vol 4 pp 2169ndash3536 2016
[18] W Shi H Zhou J Li W Xu N Zhang and X S ShenldquoDrone assisted vehicular networks architecture challengesand opportunitiesrdquo Institute of Electrical and ElectronicsEngineers Network vol 32 no 3 pp 130ndash137 2018
[19] A J Yves and H Peng ldquoRSSI-based indoor localization usingRSSI-with-angle-based localization estimation algorithmrdquoInternational Journal of Sensor Networks and Data Com-munications vol 4 no 1 2015
[20] A Mahmuda R Obaidur I Nazrul M M HassanA Alsanad and A K Sangaiah ldquoEnergy-efficient tracking andlocalization of objects in wireless sensor networksrdquo IEEEAccess vol 6 pp 17165ndash17177 2018
[21] X Yu Y Chu F Jiang Y Guo and D Gong ldquoSVMs clas-sification based two-side cross domain collaborative filteringby inferring intrinsic user and item featuresrdquo Knowledge-Based Systems vol 141 pp 80ndash91 2018
[22] Z Gao W Li Y Zhu et al ldquoWireless channel propagationcharacteristics and modeling research in rice field sensornetworksrdquo Sensors vol 18 no 9 p 3116 2018
[23] Z Wang Y Chen and H Wang ldquoSequence-based indoorlocalization with channel status informationrdquo Sensors vol 18no 6 p 1818 2018
[24] X Yu J Yang and Z Xie ldquoTraining SVMs on a bound vectorsset based on fisher projectionrdquo Frontiers of Computer Sciencevol 8 no 5 pp 793ndash806 2014
Mobile Information Systems 11