reporte de bomba listo
TRANSCRIPT

1
UNIVERSIDAD TECNOLÓGICA DE PUEBLA
CARRERA: INGENIERÍA EN TECNOLOGÍAS PARA LA AUTOMATIZACIÓN
GRADO Y GRUPO: 7º “A”
MATERIA: INSTRUMENTACIÓN VIRTUAL
PROFESOR: ING. JORGE GARCÍA AGUIRRE
PROYECTO: CONTROL AUTOMÁTICO DE UNA BOMBA
ALUMNOS:
HERNANDEZ LARA FELIPE DE JESÚS
MOXO ORTEGA ANDRÉS

2
ÍNDICE
INTRODUCCIÓN…………………………………………………………………………3
PLANTEAMIENTO DEL PROBLEMA………………………………………………….3
OBJETIVO………………………………………………………………………………..3
REQUERIMIENTOS MATERIALES…………………………………………………….4
CONEXIÓN DEL CIRCUITO……………………………………………………………5
INSTRUMENTO VIRTUAL………………………………………………………………7
CONCLUSIÓN……………………………………………………………………………11
REFERENCIA……………………………………………………………………………11
ANEXOS………………………………………………………………………………….12

3
CONTROL AUTOMÁTICO DE LLENADO DE UN TANQUE
INTRODUCCIÓN
Desde hace varios años, la mano del hombre ya no es tan necesaria para poder controlar todos aquellos equipos y artefactos que utilizamos diariamente ya sea como por ejemplo: el alumbrado público, controlar la calefacción, controlar el llenado de un tinaco con agua, entre otros. Hoy en día, existe la posibilidad de que ciertos sistemas específicos puedan controlar y/o efectuar el manejo por si solos (Automático).
Los elementos necesarios, mediante los cuales se puede obtener los efectos deseados sin la intervención de la mano del hombre se denominan sensores o actuadores. Dependiendo de la variación de la magnitud que controlen podemos tener el siguiente listado básico: El Termostato (Actúa con los cambios de temperatura), Interruptor Crepuscular (Actúa con los cambios de luz solar), Temporizador (Actúa con los cambios del tiempo), etc.
Los beneficios obtenidos por el usuario de estos sistemas de control automático son: Confort (comandar sistemas o artefactos desde cualquier lugar por medio de un control o en forma automática, seguridad (crear situaciones de simulación de personas dentro de una propiedad o simplemente una alarma, y el ahorro de tiempo (simplificando las tareas diarias.)
Para mejorar nuestro confort decidimos realizar un proyecto el cual consistirá en controlar una bomba que solo encenderá y apagara cuando el tinaco este lleno o vacío.
PLANTEAMIENTO DEL PROBLEMA
Dentro de las actividades del hogar, contar con agua todo el tiempo es indispensable, ya que su uso es necesario a cualquier hora del día, existen sistemas de control manuales es decir encender la bomba con un apagador y apagar la bomba otra vez presionando el interruptor, pero esta acción es anticuada y no precisa para parar la bomba en un tiempo preciso para que no se riegue el agua del tinaco por tanto es necesario implementar un sistema de llenado automático. Es importante contar con un sistema automatizado para el llenado del tinaco desde la cisterna de una casa, por tanto se desarrollara un instrumento virtual que en interfaz con la tarjeta arduino, realice la acción automática de llenado.
OBJETIVO
Implementar un sistema de control automático para el llenado de un tinaco con agua.

4
Encender y apagar una bomba mediante la orden de dos sensores de nivel (alto y bajo).
Desarrollar un Instrumento Virtual que controle automáticamente el circuito, por medio de un panel visual y con PLCMega.
Utilizar la tarjeta arduino uno para la implementación del circuito eléctrico.
Utilizar el bluetooth HC06 para realizar la comunicación inalámbrica entre labview y la tarjeta arduino.
REQUERIMIENTOS MATERIALES
Componentes
1 optoacoplador MOC3011 1 TRIAC MAD12D 1 Interruptor SPST 2 resistencias de 10kohms 1 resistor de 330ohms 1 minibomba de 110volts 1 Bluetooth HC06 1 PROTOBOARD
Materiales
4 m de alambre tipo telefónico #22 1 cinta de aislar Silicón 1 m de manguera de una pulgada Una llave de plástico de una pulgada 2 contenedores de plástico 1 m de tubería de cobre de ½ pulgada
Herramientas
Pinzas de corte Cúter Encendedor Pistola para silicón

5
CONEXIÓN DEL CIRCUITO
El proyecto consistirá en llenar un tinaco mediante el control automático de una bomba. Los sensores de nivel (bajo y alto) del tinaco controlaran el encendido y apagado del motor.
Descripción de la función que realizara cada pin de la tarjeta arduino en este proyecto:
Pin 4 funcionara como sensor de nivel bajo
Pin 5 funcionara como sensor de nivel alto
Pin 6 funcionara como stop o paro del instrumento virtual
Pin 7 funcionara como indicador para saber si la bomba está en funcionamiento o esta desactivada.
Pin 8 Manda la señal al MOC3011 para que active la bomba siempre y cuando las condiciones de nivel alto y bajo se cumplan.
FIGURA 1 CIRCUITO DEL PROYECTO CONTROL AUTOMÁTICO
NIVEL BAJO NIVEL ALTO
COMÚN

6
FIGURA 2 CONEXIÓN DEL MAC12D Y MOC3011
FIGURA 3 CONEXIÓN DEL MOTOR AL MAC12D
MAC12DMOC3011
MOTOR DE LA BOMBACONEXIÓN AL
TOMACORRIENTE 120VCA

7
INSTRUMENTO VIRTUAL
PLCMega es un menú muy amigable para nosotros por que nos da atajos que no brinda VISA y además maneja iconos muy fáciles de interpretar.
”PLCMega_Open.vi” Lo empleamos para declarar el COM del arduino y poder así realizar la comunicación.
”PLCMega_GetErrorMessage.vi” Lo empleamos para mostrar el estado en que se encuentra nuestro arduino o para ver si existe la conexión entre nuestra computadora y la tarjeta arduino.
”PLCMega_PinsMode.vi” Lo empleamos para declarar la entradas y salidas de nuestra tarjeta arduino.
”PLCMega_DigitalRead.vi” Lo empleamos para la lectura de una señal digital.
”PLCMega_DigitalWrite.vi” Lo empleamos para la escritura de una señal.
”PLCMega_Close.vi” Lo empleamos para cerrar el diagrama de bloques.
En el instrumento virtual se utilizó un flip-flop para leer los estados de los sensores y generar un estado de memoria para mantener encendida o apagada la memoria.

8
La compuerta not la utilizamos para manipular las salidas del flip-flop y de esta forma poder encender o apagar la bomba siempre y cuando esté lleno el tinaco y este vacío el tinaco.
FIGURA 4 FLIP-FLOP
En el caso True tenemos la condición verdadera para el accionamiento de la bomba.
FIGURA 5 ESTRUCTURA CASE “TRUE”
En el caso False la bomba tendrá que pararse debido a que las dos condiciones se han cumplido, las condiciones son que el tinaco esta vacío y lleno.

9
FIGURA 6 ESTRUCTURA CASE “FALSE”
El While Loop lo empleamos para ciclar indefinidamente nuestro instrumento.
La estructuras CASE nos sirvieron para tener los estados del tanque, en TRUE manejamos el estado lleno del tinaco y en FALSE el estado vacío del tinaco.

10
FIGURA 7 VISTA DEL PANEL FRONTAL
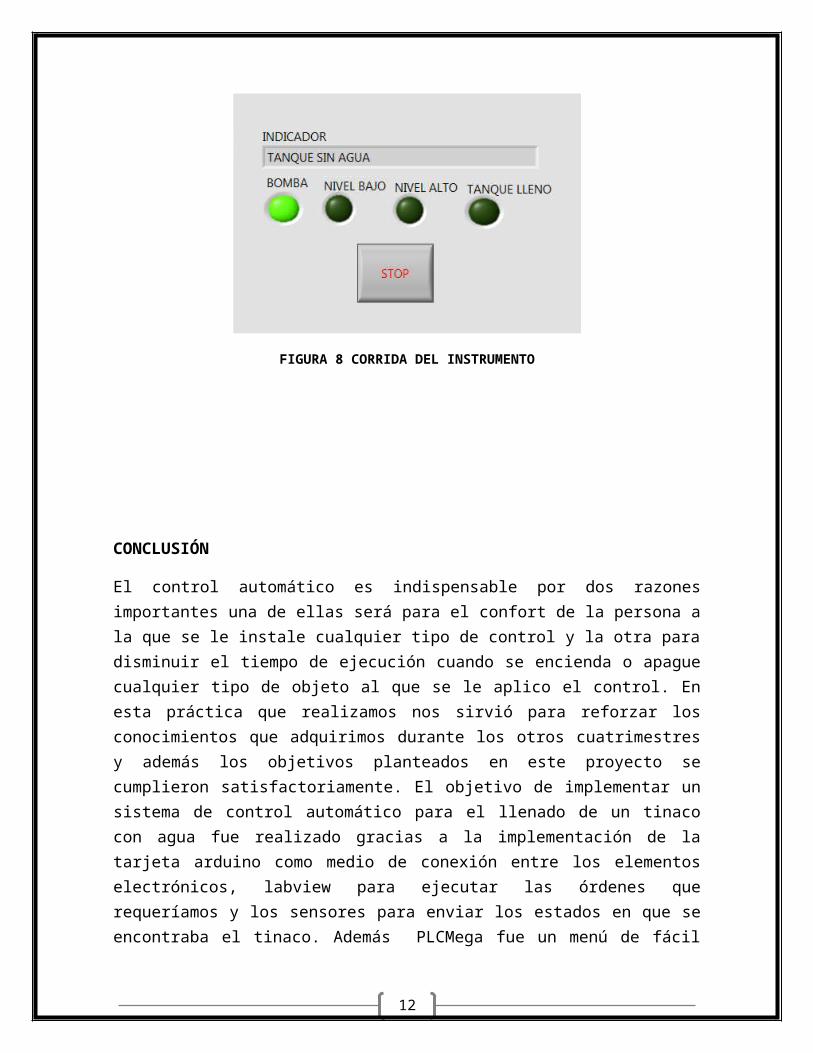
Al correr el instrumento virtual el primer sensor le mandara al instrumento la señal de que el tinaco esta vacío y por lo tanto encenderá la bomba: el sensor de nivel bajo no prendera, solo prendera cuando el agua toque el alambre de este sensor.
FIGURA 8 CORRIDA DEL INSTRUMENTO

11
CONCLUSIÓN
El control automático es indispensable por dos razones importantes una de ellas será para el confort de la persona a la que se le instale cualquier tipo de control y la otra para disminuir el tiempo de ejecución cuando se encienda o apague cualquier tipo de objeto al que se le aplico el control. En esta práctica que realizamos nos sirvió para reforzar los conocimientos que adquirimos durante los otros cuatrimestres y además los objetivos planteados en este proyecto se cumplieron satisfactoriamente. El objetivo de implementar un sistema de control automático para el llenado de un tinaco con agua fue realizado gracias a la implementación de la tarjeta arduino como medio de conexión entre los elementos electrónicos, labview para ejecutar las órdenes que requeríamos y los sensores para enviar los estados en que se encontraba el tinaco. Además PLCMega fue un menú de fácil manejo y además nos permitió controlar de satisfactoria a la tarjeta arduino. Implementar el bluetooth HC06 para realizar la comunicación inalámbrica entre labview y la tarjeta arduino fue bueno porque además de realizar una comunicación inalámbrica nos permitía proteger nuestros puertos de la computadora para cualquier tipo de falla eléctrica. La experiencia fue buena porque logramos trabajar en equipo y entregar un buen proyecto.
REFERENCIA
http://www.datasheetcatalog.net/es/datasheets_pdf/M/A/C/1/MAC12D.shtml
http://www.datasheetcatalog.net/es/datasheets_pdf/M/O/C/3/MOC3011.shtml
http://es.wikipedia.org/wiki/Biestable
http://es.wikipedia.org/wiki/Puerta_l%C3%B3gica
12
ANEXOS
FIGURA 9 CONEXIÓN DEL CIRCUITO
FIGURA 10 MAQUETA DEL CONTROL AUTOMATICO
SENSOR DE NIVEL ALTO
SENSOR DE NIVEL BAJO
MAC12D
BOTÓN DE PARO