predictive speed control with short prediction horizon for...
TRANSCRIPT
Abstract— In this paper, a predictive speed controller (PSC)
based on finite control set model predictive control is developed
for electric drives. The large difference between the mechanical
and electrical time constants necessitates long prediction horizons
for a direct PSC (DPSC) strategy to be implemented. Therefore,
the computation burden for online solving of the optimization
problem critically increases even for low complexity topologies,
whereas the DPSC implementation becomes impossible for high
complexity inverters. Additionally, due to the absence of a PI
controller in DPSC methods, stability issues arise; therefore,
special care is mandated for eliminating steady-state errors. By
using proper weighting of the speed errors, along with the
current errors, in the cost function of the proposed PSC, the use
of many prediction steps becomes unessential. For considering
the current dynamics, a linear controller is incorporated in the
control law of developed PSC offering improved system behavior,
whereas the consideration of the speed errors allows achieving
fast response characteristics. The proposed strategy is
experimentally evaluated through examining reference and
disturbance step changes of a PMSM drive with three-level
neutral-point clamped inverter. Finally, the proposed controller
operation is experimentally compared with a predictive torque
and speed control, by considering several performance indices.
Index Terms—Drive systems, model predictive control,
permanent magnet motors, variable speed drives.
I. INTRODUCTION
ERMANENT magnet synchronous motor (PMSM) drives
have been widely adopted in industrial applications thanks
to their high efficiency and high power density. Two of the
most common strategies employed for the control of PMSM
drives are direct torque control (DTC) and field-oriented
control (FOC) [1], [2]. As the complexity of the inverter
topology increases, the specifications of the electric drive
become more demanding and additional control objectives are
forced to be satisfied for high performance operation. For
example, when neutral-point clamped (NPC) inverters are
adopted, special care is given on the neutral-point potential
balance and on the distribution of the switching losses [3]–[5].
The high complexity of such a system necessitates the use of
This work was made possible by the PDRA award [PDRA 2-1110-14066]
from the Qatar National Research Fund (a member of The Qatar Foundation).
The statements made herein are solely the responsibility of the authors.
The authors are with the Department of Electrical and Computer Engineering, Texas A&M University at Qatar, Doha 23874, Qatar (email:
[email protected], [email protected])
advanced control strategies that are capable of considering
multi-variable systems [6], [7].
In such cases, model predictive control (MPC) becomes a
favorable choice toward enhancing system performance [2],
[8]–[11]. Two of the most widely used MPC strategies in
electric drives are predictive torque control (PTC) and direct
predictive speed control (DPSC). The inclusion of constraints
and nonlinearities in the control law of MPC is straightforward
which offers a superior advantage of MPC over its
counterparts [12]–[14]. More specifically, a comparative study
between FOC and PTC of an induction motor (IM) drive with
a 2L-VSI has been presented in [9]. The study showed that
PTC achieves comparable steady-state results but with faster
dynamic response and less speed oscillations. However, due to
the absence of a modulator, the switching frequency of MPC
is variable and usually lies in the range of some kHz, thus
hindering its use in applications where high switching
frequency is desirable. Nevertheless, as discussed in [1], [9],
the computation capacity of microprocessors is ever
increasing, making the use of MPC possible in applications
where conventional practices prevail. Furthermore, the
multivariable nature of MPC enabled the controller to
minimize the speed ripple in [15], whereas in [16], the PTC
successfully tracked the maximum torque per ampere
trajectory of an interior PMSM overcoming the high saliency
levels. In the aforesaid cases ([6], [9], [16]–[18]), predictive
control was accompanied by a proportional-integral (PI)
controller.
On the other hand, several DPSC strategies have been
presented in literature. A DPSC strategy directly controls the
speed of the motor and achieves high-speed control dynamics.
More specifically, a PMSM drive system was controlled by a
cascade-free predictive controller exhibiting fast response to
speed changes in [8]. In [19], DPSC was used along with an
optimization algorithm achieving good dynamic behavior
while keeping all the system variables within their normal
operating range. A DPSC was developed for a two-mass
system in [20] mitigating torque pulsations by penalizing
switching states that generate high frequencies in the phase
currents. In [21], the use of an augmented state-space model
combining current and speed control exhibited promising
characteristics. All the aforementioned examples of direct
MPC are favored by its nature allowing the consideration of
several system constraints while meeting strict specifications.
However, the large difference between the mechanical and
electrical time constants necessitates long prediction horizons
Predictive Speed Control with Short Prediction
Horizon for Permanent Magnet Synchronous
Motor Drives
Panagiotis Kakosimos, Member, IEEE, and Haitham Abu-Rub, Senior Member, IEEE
P
for the DPSC strategy to be implemented for electric drives
[8]. The high computation burden of solving the optimization
problem in real time hinders the implementation of the DPSC
method even in conventional voltage-source inverters (VSIs)
and requires simplifications of the involved components [5],
[17], [18]. Therefore, alternative approaches, or even
compromises, are considered, while the use of switching state
minimization techniques becomes of high importance [22],
[23]. Additionally, the absence of a PI controller raises
concerns about the system stability, whereas the elimination of
steady-state errors is difficult and demands additional control
routines. Without integral action or without a PI controller,
direct MPC faces challenging performance issues; thus,
special care was given in [24]. It is evident that although
DPSC offers improved transient performance, its
implementation faces critical performance issues and
challenges.
In this paper, the aforementioned problems are addressed by
weighting both the speed and current errors in the cost
function of the proposed PSC; therefore, the developed finite-
control set (FCS)-MPC combines the advantages of both
indirect and direct predictive control schemes. More
specifically, the use of many predictions steps is not mandated
because the current errors, which are provided by an
incorporated PI controller in the control law of MPC, are
involved in the decision process. Additionally, the use of an
indirect scheme enables the controller to improve the overall
system performance by eliminating steady-state errors and
mitigating high-frequency current components. On the other
hand, the consideration of the speed errors offers improved
behavior when encountering abrupt transient conditions.
Hence, the developed controller achieves a performance
similar to that of DPSC strategies but with short prediction
horizon, low computation burden, and improved steady-state
characteristics. In order to assess the performance of the
developed PSC, a PMSM drive with a 3L-NPC inverter is
investigated, where the high number of output voltage vectors
significantly increases the challenge for the controller. The
proposed PSC method is experimentally evaluated by
examining the steady-state and dynamic performance under
speed and load torque changes of the electric drive. The
proposed controller is experimentally compared with PTC and
PSC strategies in terms of several quantitative and qualitative
performance indices and control objectives.
II. MOTOR AND INVERTER DYNAMIC MODEL
The design characteristics of a PMSM significantly differ
from that of the widely used IMs. It is characterized with
increased challenges for the control system. The predictive
model has to be developed in such a manner that a dynamic
control is accomplished, while the restrictions arising from the
inverter topology are addressed. An overview of the
considered system topology is shown in Fig. 1.
A. State-space model
The well-known electrical PMSM state-space model is used
by the controller to estimate the value of the system state-
space variables at the end of future sampling instants [5], [25].
For the convenience of programming, the system equations are
expressed in matrix form as follows:
𝑑𝑥
𝑑𝑡= 𝐀𝑥 + 𝐁𝑢 + 𝐸, (1)
where the state vector is 𝑥 = 𝑦 = [𝑖𝑑 , 𝑖𝑞]𝑇. The system
matrices used in (1) are:
𝐀 = [−
𝑅
𝐿𝑑
𝐿𝑞
𝐿𝑑𝜔
−𝐿𝑑
𝐿𝑞𝜔 −
𝑅
𝐿𝑞
] , 𝐁 = [
1
𝐿𝑑0
01
𝐿𝑞
] , 𝐄 = [0
−𝜓
𝐿𝑞𝜔], (2)
where 𝑅 is the stator resistance, 𝐿𝑑 and 𝐿𝑞 are the dq-axis
inductances, 𝜔 is the electrical speed and 𝜓, is the flux linkage
established by the permanent magnets. Since the directly
controlled variables are the dq-axis motor currents, the output
vector, 𝑦, is identical with the state vector, 𝑥. The control
vector, 𝑢 = [𝑢𝑑, 𝑢𝑞]𝑇 = 𝐌𝐃𝐔 associates the switching states
with the predicted values of the controlled variables. Because
the switching-state vector, 𝐔, is expressed in the three-phase
representation system {�⃗�, �⃗⃗�, 𝑐}, the conversion matrices 𝐌 and
𝐃 are used to transform it into the αβ-frame {�⃗�, 𝛽} and
afterwards into the dq-reference frame {𝑑, �⃗�} as follows:
𝐌 = [𝑠𝑖𝑛𝜃 −𝑐𝑜𝑠𝜃𝑐𝑜𝑠𝜃 𝑠𝑖𝑛𝜃
] , 𝐃 =2
3[1 − 1 2⁄ − 1 2⁄
0 √3 2⁄ −√3 2⁄], (3)
where 𝐔 is 𝐔 = [Γ𝑎, Γ𝑏 , Γ𝑐]𝑇 and 𝜃 is the electrical angle of
the rotor. Parameter Γ can be expressed as function of the DC-
link capacitor voltages and the switching state, 𝑇, as next:
Γ𝑥 =𝑇𝑥(𝑇𝑥 + 1)
2𝑣𝐶1 −
𝑇𝑥(𝑇𝑥 − 1)
2𝑣𝐶2. (4)
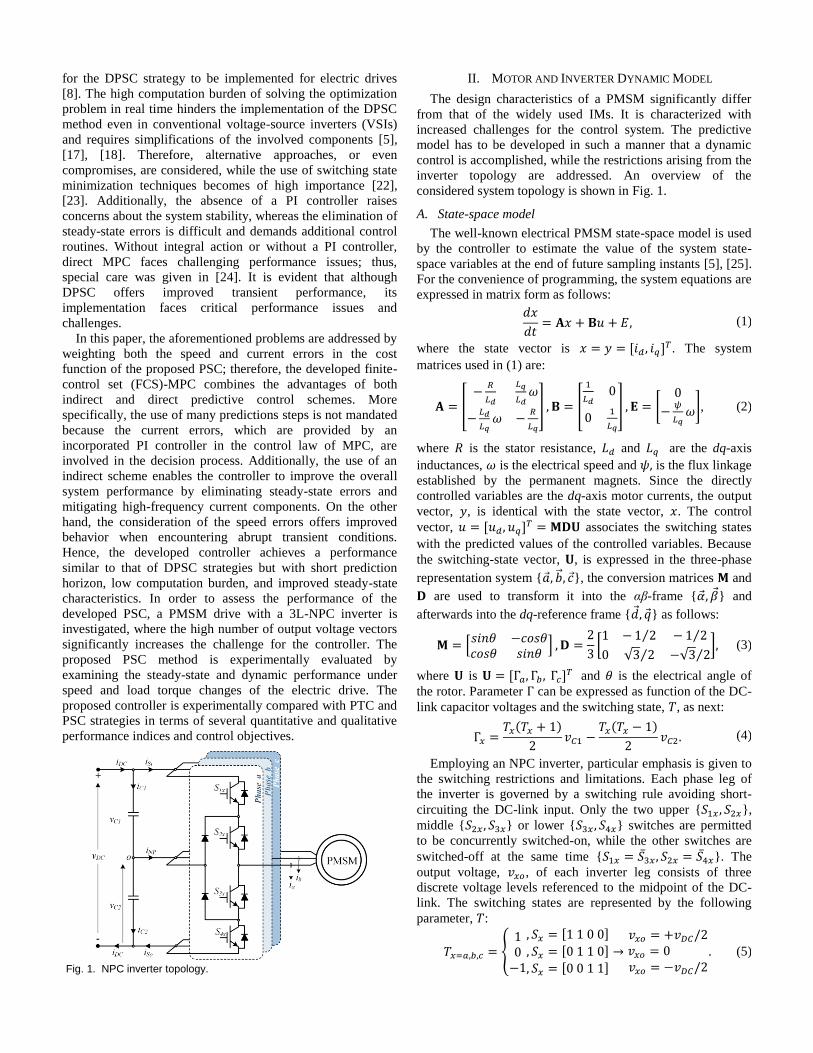
Employing an NPC inverter, particular emphasis is given to
the switching restrictions and limitations. Each phase leg of
the inverter is governed by a switching rule avoiding short-
circuiting the DC-link input. Only the two upper {𝑆1𝑥 , 𝑆2𝑥},
middle {𝑆2𝑥 , 𝑆3𝑥} or lower {𝑆3𝑥 , 𝑆4𝑥} switches are permitted
to be concurrently switched-on, while the other switches are
switched-off at the same time {𝑆1𝑥 = 𝑆3̅𝑥 , 𝑆2𝑥 = 𝑆4̅𝑥}. The
output voltage, 𝑣𝑥𝑜, of each inverter leg consists of three
discrete voltage levels referenced to the midpoint of the DC-
link. The switching states are represented by the following
parameter, 𝑇:
𝑇𝑥=𝑎,𝑏,𝑐 = {10
−1
, 𝑆𝑥 = [1 1 0 0]
, 𝑆𝑥 = [0 1 1 0]
, 𝑆𝑥 = [0 0 1 1]→
𝑣𝑥𝑜 = +𝑣𝐷𝐶/2𝑣𝑥𝑜 = 0 𝑣𝑥𝑜 = −𝑣𝐷𝐶/2
. (5)
Fig. 1. NPC inverter topology.
At the end of the prediction stage of the motor currents, the
electromagnetic torque can be estimated by using:
𝑇𝑒𝑛 =3
2𝑝(𝜓𝑖𝑞 + (𝐿𝑑 − 𝐿𝑞)𝑖𝑑𝑖𝑞). (6)
For extending the controller to control the speed directly, the
mechanical state-space model is used. The electrical motor
speed is given by the following differential equation:
𝑑𝜔
𝑑𝑡= −
𝐵𝑣
𝐽𝑚
𝜔 +𝑝
𝐽𝑚
(𝑇𝑒𝑛 − 𝑇𝑙), (7)
where 𝑝 is the number of pole pairs and 𝑇𝑙 is the load torque.
Parameters 𝐵𝑣 and 𝐽𝑚 are the moment of inertia and damping
ratio, respectively.
B. Neutral-point potential balance
The voltage balance, 𝑣𝑁𝑃, across the terminals of the DC-
link capacitors is achieved by regulating the time of which
each inverter leg dwells on the middle point, 𝑜. Voltage
unbalance is undesirable because it has an immediate negative
effect on the output voltage and on the semiconductor switch
stress. Enabling the controller to consider such unbalance is
possible by expressing the voltage difference of the capacitors
as function of the switching states. In literature, several
methods exist for keeping the voltage of the neutral point at
zero level [26]. In order for the MPC to minimize the voltage
difference, 𝑣𝑁𝑃, by predicting it at the end of the next
sampling period, the sensing of the DC input current, 𝑖𝐷𝐶 , or
the currents of the capacitors, 𝑖𝐶𝑥, is mostly used [27], [28].
However, the potential of the neutral point can be predicted by
measuring only the total DC-link voltage and not the
individual voltages of the capacitors [29]. This helps in
decreasing the component count and improving system
reliability. The current flowing from the middle point of the
DC-link to the clamping diodes, 𝑖𝑁𝑃, can be expressed by:
𝑖𝑁𝑃 = [1 − 𝑇𝑎2 1 − 𝑇𝑏
2 1 − 𝑇𝑐2]𝐢, (8)
where 𝐢 = [𝑖𝑎, 𝑖𝑏 , 𝑖𝑐]𝑇. The voltage difference of the DC-link
capacitors, 𝑣𝑁𝑃, can be estimated by using the differential
equation that describes their operation:
𝑖𝐶1 − 𝑖𝐶2 = 𝐶𝑑
𝑑𝑡(𝑣𝐶2 − 𝑣𝐶1) → 𝑖𝑁𝑃 = 𝐶
𝑑𝑣𝑁𝑃
𝑑𝑡. (9)
Considering (8) and (9), the voltage unbalance is expressed
as a function of the switching states. In (9), both capacitances
have been considered equal 𝐶1 = 𝐶2 = 𝐶.
III. PROPOSED PREDICTIVE CONTROLLER
By using the dynamic inverter and motor model and by
evaluating all the possible switching combinations, the
predictive controller can decide which combination satisfies
all the set requirements with minimum cost. However, since
the control strategy is implemented into a digital controller,
the continuous-time model needs to be discretized first. In
electric drives, several discretization methods have been used
in order to find an accurate discrete-time model. When the
computation burden is a concern, simple discretization
methods are usually adopted [9], [16], [30]. However, when a
highly time-consuming method is applied, the system
accuracy can be significantly increased [17], [19], [31]. In this
study, the computation load is high because of the high
number of switching states. Therefore, the approach based on
Euler discretization in [24] has been found favorable while
offering satisfactory performance.
In conventional cascade-free PSC strategies [8], the speed,
𝜔𝑚, is estimated using the speed dynamics (7) and is
compared with the reference speed, 𝜔𝑚∗ . Owing to the large
difference between mechanical and electrical time constants, a
long prediction horizon is mandated in the prediction process
of the speed [8], [21]. However, in the case where a 3L-VSI is
employed, the number of the switching combinations becomes
high enough, making the implementation of direct speed
controller a challenge. Regardless the number of prediction
steps, integrators are needed to provide the speed reference
and advanced observers to compensate parameter variation
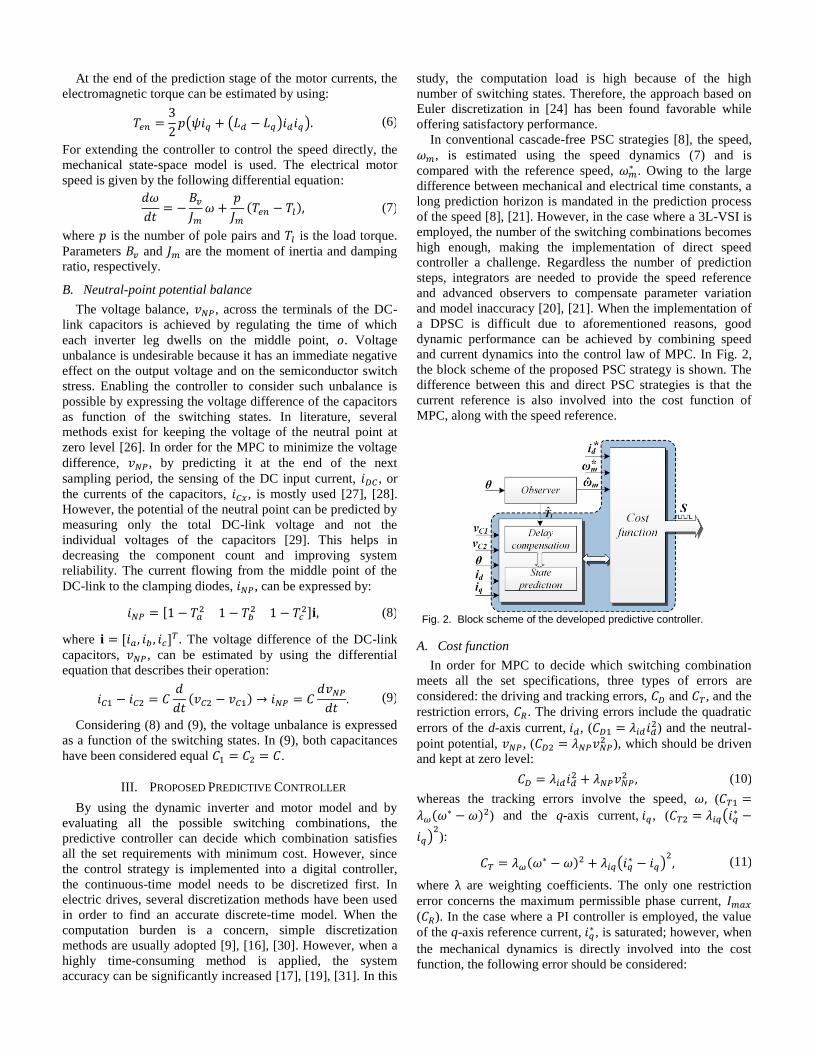
and model inaccuracy [20], [21]. When the implementation of
a DPSC is difficult due to aforementioned reasons, good
dynamic performance can be achieved by combining speed
and current dynamics into the control law of MPC. In Fig. 2,
the block scheme of the proposed PSC strategy is shown. The
difference between this and direct PSC strategies is that the
current reference is also involved into the cost function of
MPC, along with the speed reference.
A. Cost function
In order for MPC to decide which switching combination
meets all the set specifications, three types of errors are
considered: the driving and tracking errors, 𝐶𝐷 and 𝐶𝑇, and the
restriction errors, 𝐶𝑅. The driving errors include the quadratic
errors of the d-axis current, 𝑖𝑑, (𝐶𝐷1 = 𝜆𝑖𝑑𝑖𝑑2) and the neutral-
point potential, 𝑣𝑁𝑃, (𝐶𝐷2 = 𝜆𝑁𝑃𝑣𝑁𝑃2 ), which should be driven
and kept at zero level:
𝐶𝐷 = 𝜆𝑖𝑑𝑖𝑑2 + 𝜆𝑁𝑃𝑣𝑁𝑃
2 , (10)
whereas the tracking errors involve the speed, 𝜔, (𝐶𝑇1 =
𝜆𝜔(𝜔∗ − 𝜔)2) and the q-axis current, 𝑖𝑞 , (𝐶𝑇2 = 𝜆𝑖𝑞(𝑖𝑞∗ −
𝑖𝑞)2):
𝐶𝑇 = 𝜆𝜔(𝜔∗ − 𝜔)2 + 𝜆𝑖𝑞(𝑖𝑞∗ − 𝑖𝑞)
2, (11)
where λ are weighting coefficients. The only one restriction
error concerns the maximum permissible phase current, 𝐼𝑚𝑎𝑥
(𝐶𝑅). In the case where a PI controller is employed, the value
of the q-axis reference current, 𝑖𝑞∗ , is saturated; however, when
the mechanical dynamics is directly involved into the cost
function, the following error should be considered:
Fig. 2. Block scheme of the developed predictive controller.

𝐶𝑅 = {𝜆𝐼𝑚 (√𝑖𝑑
2 + 𝑖𝑞2 − 𝐼𝑚𝑎𝑥) ,
0,
𝑖𝑓 √𝑖𝑑2 + 𝑖𝑞
2 > 𝐼𝑚𝑎𝑥 ,
𝑜𝑡ℎ𝑒𝑟𝑤𝑖𝑠𝑒.
(12)
In conventional DPSC, the tracking errors in (11) involve
only the dynamics of the speed without considering the current
errors. In this case, a long prediction horizon is needed to
compensate for the difference in mechanical and electrical
dynamics. At steady-state operation, when the motor reaches
the reference speed, the speed error in the cost function is
expected to be significantly low because the mechanical time
constant is considerably larger than the sampling time. If the
prediction horizon is not high enough in order to involve both
dynamics, high-frequency components are generated in the
motor currents [20]. In order to mitigate these components, the
integral function of a linear controller is incorporated into the
cost function of the predictive controller in (11):
𝑖𝑞∗ [𝑘] = 𝑖𝑞
∗ [𝑘 − 1] + 𝑘1(𝜔∗[𝑘] − 𝜔[𝑘])
+ 𝑘2(𝜔∗[𝑘 − 1] − 𝜔[𝑘 − 1]), (13)
where 𝑘1 and 𝑘2 are the coefficients of the linear controller.
The current errors (𝐶𝑇2) which involve the generated q-axis
reference current, 𝑖𝑞∗ , are weighted in the cost function of PSC.
Switching combinations that generate high frequencies in the
phase currents are penalized because their current errors (𝐶𝑇2)
are large. On the other hand, under speed transients, the
behavior of the controller is similar to that of DPSC strategies.
The speed errors (𝐶𝑇1) are high enough because of the large
difference between the reference, 𝜔∗, and actual speed, 𝜔.
The parameters of the linear controller can be calculated by
using the pole-assignment method along with the feedforward
controller structure and considering only the mechanical
dynamics [24]. Therefore, the first-order model of the motor is 𝛺(𝑠)
𝐼𝑞∗(𝑠)
≈𝑏
𝑠+𝑎 and the gains can be computed by:
𝑘 =2𝜉𝜔𝑛 − 𝑎
𝑏, 𝜏 =
2𝜉𝜔𝑛 − 𝑎
𝜔𝑛2
, (14)
where 𝜏 is the integral time constant, 𝑘 is the proportional
gain, 𝜉 is the damping coefficient and 𝜔𝑛 is the natural
frequency. The 𝑘1 coefficient is equal to the proportional gain,
𝑘, whereas the 𝑘2 coefficient is 𝑘 (−1 +𝑇𝑠
𝜏). It is important to
note that the first-order model is independent of the electrical
parameters of the motor. The parameters 𝑎 and 𝑏 in (14) are
𝑎 =𝐵𝑣
𝐽𝑚, 𝑏 =
3
2
𝑝2𝜓
𝐽𝑚α [24].
The combination of both dynamics allows the controller to
differentiate its behavior depending on the operating
condition. The use of long prediction horizons is not
mandated, and the algorithm can be implemented even for
topologies with high complexity. The total switching states of
a 3L-NPC inverter are 27, 8 of which are redundant. There are
four discrete categories of voltage vectors: 3 zero vectors
{𝑣1 … 𝑣3}, 12 small vectors {𝑣4 … 𝑣15}, 6 medium vectors
{𝑣16 … 𝑣21}, and 6 large vectors {𝑣22 … 𝑣27}. Since the
number of voltage vectors is high enough, the computation
burden is thus significantly increased and in some cases, the
consideration of long prediction horizons is impossible. For
reducing the number of the examined switching states, and
consequently the total burden, several methods have been
presented in literature [8], [16].
Furthermore, predictive control employs weighting factors,
λ, in the decision process allowing system variables of
different nature to be controlled as in (10)-(12). The
determination of the weighting coefficients is a challenging
process, which is usually based on empirical or heuristic
methods. Since the controlled variables are expressed in
different units, the primary use of the weights is to normalize
the errors involved in the cost function. In order to determine
their values, the performance of the controller is tested under
several test-case scenarios considering satisfactory
performance characteristics and the satisfaction of the system
restrictions. Finally, the cost function for the evaluation of the
switching states takes the following form:
𝑔 = ∑ 𝐶𝐷𝑚
2
𝑚=1
+ ∑ 𝐶𝑇𝑛
2
𝑛=1
+ 𝐶𝑅. (15)
B. Load torque observer
In order for the controller to predict the motor speed in (7),
the load torque information is necessary; therefore, an
extended Luenberger observer has been adopted. The use of a
load torque observer allows estimating the torque without
using additional sensing equipment. The estimated load
torque, along with the estimated speed, has been designated as
input to the controller as shown in the block scheme of Fig. 2.
It is worth noticing that the impact of the speed measurement
noise, owing to the quantization of the mechanical angle may
significantly affect the system performance given the high
sampling rate of the predictive controller. Therefore, the
observer not only assists in providing the load torque
information for the controller, but also helps in mitigating
noise and discretization errors from the speed sensor. The load
torque and speed observer is designed as follows:
𝑑�̂�
𝑑𝑡= 𝐀�̂� + 𝐁�̂� + 𝐋𝑣, (16)
where 𝑥 = [𝜃, 𝜔, 𝑇𝑙]𝑇, 𝑣 = 𝑦– �̑� = 𝑪(𝑥– �̑�) and 𝑳 =
[𝑙1, 𝑙2, 𝑙3]𝑇. Hereafter, the notation ( ̂) is used for the
description of estimated values. The system matrices 𝐀 and 𝐁
derive from the mechanical dynamics in (7). By regulating the
gains of the observer, its response can be properly adjusted
[8]. Both the observer and the predictive controller are
sensitive to the deviations of the moment of inertia. The inertia
identification of a single or two-mass system is a difficult
process. In literature, there are approaches where the inertia is
updated based on the on-line self-tuning of the observer (16).
In this paper, the moment of inertia, 𝐽𝑚, and the damping ratio,
𝐵𝑣, of the experimental setup have been identified by carrying
out extensive experiments.
IV. EXPERIMENTAL SETUP & SYSTEM SPECIFICATIONS
In order to validate the performance of the developed
methodology experimentally, an experimental setup was
employed. In this setup, a surface-mount PMSM is supplied
by a three-phase NPC inverter and is coupled to a hysteresis
brake by a spring shaft coupling. The brake is equipped with
its own controller board and is capable of providing

programmable torque loading independent of the shaft speed.
Table I summarizes the main characteristics of the test-bed.
The control algorithm, which is written in C language, is
implemented on a dSPACE PX10 expansion box equipped
with a DS1006 processor. The processor board is accompanied
by a high-speed A/D board, a digital output board, and an
incremental encoder interface board. For configuring the
parameters of the examined controllers, Controldesk
experiment software is used. The main controller board
receives and processes the signals from the current and voltage
transducers as well as the pulse series generated by the speed
encoder. The circuit connections of the investigated system are
shown in the block diagram of Fig. 3 whereas Fig. 4 depicts
the experimental setup used for the validation of the developed
control strategy. TABLE I
MAIN SYSTEM PARAMETERS
Motor parameter / Symbol
Value System parameter /
Symbol Value
Dq-axis inductances, 𝐿 20 mH Nominal torque, 𝑇 10 Nm
Nominal current, 𝐼𝑁 2.7 A Nominal speed, 𝜔𝑚 20 rad/s
Winding resistance, 𝑅 6.98 Ω DC-link capacitors, 𝐶 3 mF
Flux linkage, 𝜓 1.06 Wb DC-bus voltage, 𝑣𝐷𝐶 400 V
Pole pairs, 𝑝 4 Moment of inertia, 𝐽𝑚 0.0212 kgm2
Voltage constant, 𝑘𝑒 750 Vp/krpm Viscous damping, 𝐵𝑣 3.1·10-4 Nms
A quadrature speed encoder with a resolution of 2048
pulses per revolution is used. The low resolution of the speed
encoder demands a special attention in order to avoid
discretization errors in cases where the motor speed is low and
the sampling frequency of the controller is high. The
maximum motor speed is limited by the voltage of the DC
bus. The high computation resources needed for the processor
to implement the control strategies determine the finally
applied switching frequency range. The sampling time for the
developed PSC strategy is found approximately 80μs. A delay
compensation stage is also considered for compensating the
computation time delay caused by the digital controller.
Furthermore, in order to use the same baseline for the
comparison of different control techniques, the same sampling
time is adopted. The average switching frequency of the
predictive controllers is identified in the range of 1-2 kHz.
V. CONTROLLER EVALUATION
The developed PSC strategy is evaluated by examining the
operation of the drive system either under normal or abrupt
transient operating conditions. The controller performance is
also compared with the performance of PSC strategy with
filtering the high-frequency current components (PSCf) [20],
and conventional PTC [16] by conducting several simulations
and experiments. For determining the initial gain values, the
pole-assignment design technique has been employed for both
PTC and PSC strategies, and a preliminary study has been
conducted with the damping coefficient, 𝜉, equal to 0.707.
This damping coefficient has been selected because it allows
fast speed response with a reasonable overshoot and improved
disturbance rejection. However, after specifying the initial
gains, several tests have been carried out to tune their values.
It has been found that when the proportional gain of the PI
controller is 0.60 (= 𝑘) with a time constant of 0.028 (= 𝜏),
the transient behavior of the controller is satisfactory and the
system remains stable when encountering disturbances. In
order for the comparison of the PTC and PSC strategies to be
fair, the coefficients in (13) were calculated by discretizing the
PI controller parameters of PTC; thus, equivalent gains are
used for the suggested PSC (𝑘1=𝑘=0.60, 𝑘2= 𝑘 (−1 +
𝑇𝑠
𝜏)=−0.598).
On the other hand, for the determination of the weighting
coefficients, 𝜆, extensive experiments have been carried out
enabling the system to perform satisfactorily at steady-state
conditions as well as under dynamic changes. The weights for
the current errors are firstly determined by normalizing their
values; therefore, the initial values are 𝜆𝑖𝑞 = 𝜆𝑖𝑑 =1
𝐼𝑁.
Secondly, the weight of the neutral-point potential is
determined in order to ensure that the controller keeps the
voltage difference of the DC-link capacitors within the
required limits. Afterward, the additional weighting factor of
the speed errors is calculated for achieving improved transient
response without distorting the motor currents. Finally, the
derived weighting factors have been tuned by conducting a
sensitivity analysis and adopted for all the examined
predictive control strategies (𝜆𝑖𝑞=0.25, 𝜆𝑖𝑑=0.25, 𝜆𝜔=10,
𝜆𝑁𝑃=0.1, 𝜆𝐼𝑚=106). Finally, the gains of the developed
observer for the proposed PSC as well as PSCf are 105 (= 𝑙1),
2x104 (= 𝑙2) and 5x102 (= 𝑙3).
For the implementation of the PSCf strategy [20] used for
the experimental assessment of the developed controller, the
same configuration parameters are adopted. In this method,
the switching states that generate high frequency components
in the phase currents are penalized. Therefore, in the driving
Fig. 3. Block diagram of the experimental setup.
Fig. 4. Experimental setup.

errors, 𝐶𝐷, of (15), one additional control requirement needs to
be considered [20]:
𝐶𝐷3 = 𝜆𝑖𝑞𝑖𝑞𝑓2 + 𝜆𝑖𝑞
′ (𝜔∗ − 𝜔)𝑖𝑞𝑓′2 , (17)
where 𝑖𝑞𝑓 and 𝑖𝑞𝑓′ are the filtered versions of the q-axis
current. The purpose of these two additional terms is to keep
the high frequency components of the q-axis current at zero
level. However, this strategy entails increased computation
resources mainly due to the addition of the two discrete filters
into the online prediction process. Moreover, the
determination of the weighting factors along with the cut-off
frequencies of both filters is not a straightforward process.
These additional parameters can be determined by conducting
several experiments while assessing the system performance.
It has been found that when the cut-off frequency of the filters
is around 500 Hz and the additional weighting factor is 𝜆𝑖𝑞′ =
𝜆𝑖𝑞10−2 , the controller effectively handles the drive system.
Furthermore, both simulations and experiments have the
same system parameters such as gains, weighting factors,
observer characteristics, and sampling rates allowing safe
conclusions. However, the aforementioned parameters can be
further fine-tuned in the experimental setup. At this point, two
important differences have to be noted. Firstly, in the
simulation model, a single-mass system has been considered,
whereas in the experimental setup a two-mass system is
employed. The used hysteresis brake has its own PI controller
in order to regulate the applied load torque. Secondly, the low
resolution of the speed encoder, quantization errors, offset,
and linearity errors in the transducers are expected to have
negative impact on the performance of the experimental
system.
A. Simulation results
The performance of the drive system is evaluated by
considering several successive operating conditions involving
speed reference and loading changes for the three examined
control strategies. The purpose of these simulations is to
examine the dynamic performance of the developed controller
highlighting the aspects that cannot be tested experimentally.
1) Steady-state and transient operation
As shown in Fig. 5a, the motor starts from standstill and its
speed reverses at 𝑡 = 0.2 and 0.4 s under a load torque of 10
Nm. Afterward, at 𝑡 = 0.6 s, the load torque changes from 10
to 1 Nm and recovers at 𝑡 = 0.8 s. The reference speed and
load torque used to produce the simulation results of Fig. 5a
are shown in Fig. 5b. In order not to violate the maximum
permissible phase current, all controllers are saturated at 1.5
times the nominal current.
TABLE II
RESPONSE CHARACTERISTICS OF FIG. 6A AND B
Time, 𝑡 (s) 0.2 (a) 0.4 (b)
Parameter / Method PSC PTC PSCf PSC PTC PSCf
Rise time, 𝑡𝑟 (ms) 13.6 16.5 13.6 21.1 26.8 21.7
Settling time, 𝑡𝑆𝑆 (ms) 17.2 52.9 19.4 27.05 58.08 29.45
Over/under shoot, 𝑂𝑉 (%) 1.34 6.66 6.98 0.854 4.56 4.47
Peak, 𝑛𝑝 (rpm) 195.1 205.5 206.2 192.63 199.71 199.55
Peak time, 𝑡𝑝 (ms) 20.5 37.0 18.5 30.5 50.4 29.1
The dynamic and steady-state performance of the three
methods is satisfactory. As shown in Fig. 6, the developed
PSC strategy has the lowest overshoot in the four transient
conditions with minimum settling time and exhibits a
significantly improved dynamic performance. Although the
gains of the controllers of the proposed PSC and the
conventional PTC have the same configuration, the overshoot
of the latter method is significantly higher. By comparing
these two methods it is evident that when the speed dynamics
are included into the control law of MPC, the system
performance is enhanced and it is similar to that of DPSCs but
with short prediction horizon and consequently less
computation burden. During the speed change, the speed error
is high compared to the current error, thus the controller
accurately tracks the speed reference. At steady-state
operation, both methods exhibit similar performance because
the speed error for all the switching states is significantly
smaller. In this case, the current error drives the decision
process of PSC mitigating the high frequency components in
the phase currents.
TABLE III
RESPONSE CHARACTERISTICS OF FIG. 6C AND D
Time, 𝑡 (s) 0.6 (c) 0.8 (d)
Parameter / Method PSC PTC PSCf PSC PTC PSCf
Over/under shoot, 𝑂𝑉 (%) 11.3 18.1 10.9 10.7 18.3 10.2
Peak, 𝑃 (rpm) 212.6 225.6 210.3 170.5 156.2 171.9
Peak time, 𝑡𝑝 (ms) 9.9 13.9 9.6 9.5 15.1 9.2
On the other hand, the performance of the PSCf method is
also satisfactory at steady-state conditions and under load
torque changes. However, during speed transient conditions
the added filters negatively affect the performance of the
controller by increasing the overshoot and oscillations of the
motor speed. The response of the PSCf strategy is slightly
(a)
(b)
Fig. 5. Speed reversal from 20 to -20 rad/s at 𝑡 = 0.2 and 0.4 s and load torque change from 10 Nm to zero at 𝑡 = 0.6 and 0.8 s for PSC, PTC, and PSCf: (a) Mechanical speed. (b) Reference speed and load torque.

faster when the load torque changes are encountered, as shown
in Fig. 6c and d. The main reason is that a PI controller is
absent and a filter is used to mitigate the high-frequency
components in the phase currents. When the bandwidth of the
filter is wide, a faster transient response can be achieved. On
the other hand, when the filter bandwidth is narrow, the
mitigation of the high-frequency component is improved but
the controller response under speed reference changes is
negatively affected. It is clear that a compromise is necessary
because this method is highly dependent on the filter
configuration. Finally, all the controllers satisfied the critical
control objective of keeping the neutral-point potential at zero
level. All response characteristics of Fig. 5 are summarized in
Tables II and III.
2) Sensitivity analysis
Since all the examined control strategies involve several
configuration parameters, gains and weights, a sensitivity
analysis is performed in this section. The steady state and
transient performances of the controllers are examined under
different PI gains and weighting factors by considering the
controller response of Fig. 6b and c as a basis for the analysis.
Firstly, the configuration of the PI controller is investigated by
increasing the proportional gain with steps of 20%, while
decreasing the integral gain accordingly. When the
proportional gain increases, the transient response of PTC
under a speed reference change is improved, as shown in Fig.
7. Both the overshoot and the settling time decrease allowing
the PTC method to reach the performance of the PSC strategy.
However, when a higher proportional gain is used, a faster
closed-loop response under speed changes is achieved at the
expense of increased sensitivity to disturbances. Therefore,
when a load torque change is encountered, the transient
response of the system is slower as shown in the results
summarized in Table IV.
On the other hand, special care has to be given to the
weighting factors of the PSC method. In the sensitivity
analysis, the same transient condition of Fig. 6b is considered,
whereas the initial values of the current and speed weights are
𝜆𝑖𝑑𝑞= 0.25 and 𝜆𝜔=10. As shown in Fig. 8, when decreasing
the value of the speed weight, both the settling and peak times
considerably increase. The influence of the speed errors in the
decision process is reduced; therefore, the controller needs
more time to reach the new steady state condition. If
increasing the value of the speed weight, the speed errors stop
affecting the response characteristics. However, since the
prediction horizon is short, the distortion of the motor current
increases when the speed weight is considerably high. On the
other hand, the current weight does not significantly affect the
transient characteristics because a PI controller has been used
to provide the q-axis current reference. The main role of the
current errors is to assist in following the q-axis reference and
in mitigating the high-frequency components of the grid
current.
(a)
(b)
Fig. 8. Percentage deviation of 𝑡𝑝, 𝑡𝑠𝑠 and 𝑛𝑝 compared to the results
of PSC in Table II – 4(b) (initial weights are 𝜆𝑖𝑑𝑞 = 0.25 and 𝜆𝜔=10).
(a)
(b)
(c)
(d)
Fig. 6. Zoom in the results of Fig. 5.
(a)
(b)
Fig. 7. Speed reference (a) and load torque change (b) for different PI configuration for the PTC strategy (the arrows denote increasing the kp gain, whereas the settling times are marked with a circle).
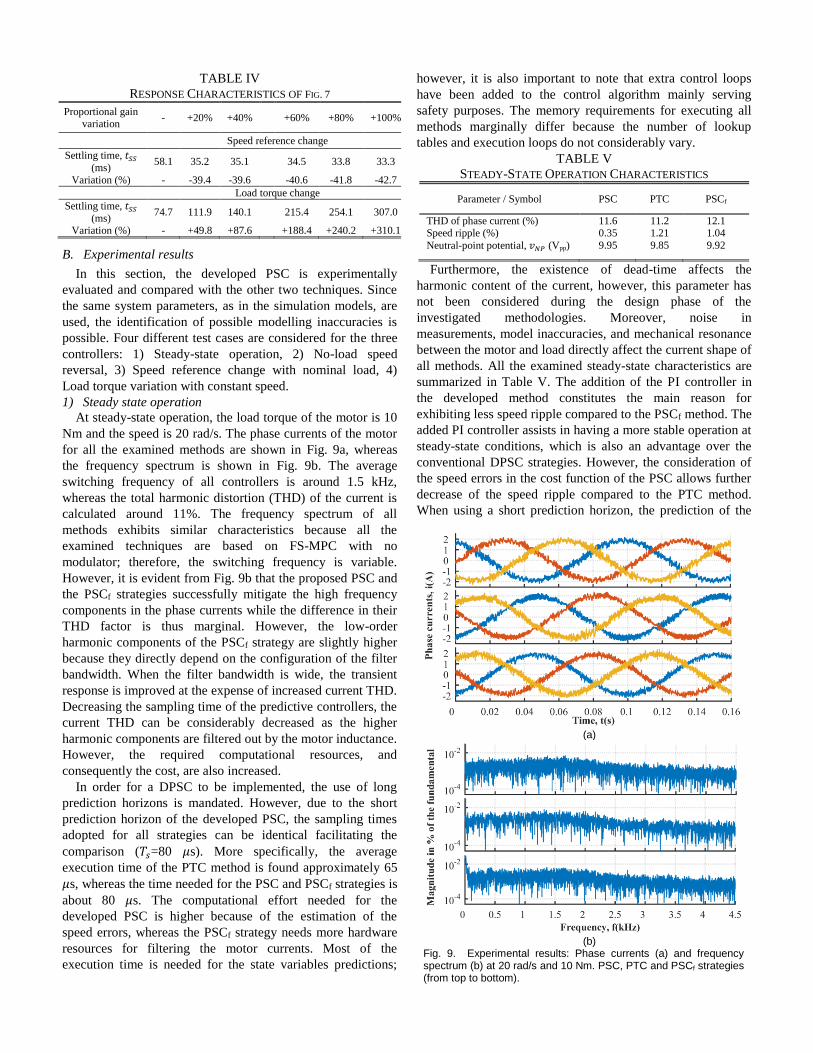
TABLE IV
RESPONSE CHARACTERISTICS OF FIG. 7
Proportional gain variation
- +20% +40%
+60% +80% +100%
Speed reference change
Settling time, 𝑡𝑆𝑆
(ms) 58.1 35.2 35.1
34.5 33.8 33.3
Variation (%) - -39.4 -39.6 -40.6 -41.8 -42.7
Load torque change
Settling time, 𝑡𝑆𝑆
(ms) 74.7 111.9 140.1
215.4 254.1 307.0
Variation (%) - +49.8 +87.6 +188.4 +240.2 +310.1
B. Experimental results
In this section, the developed PSC is experimentally
evaluated and compared with the other two techniques. Since
the same system parameters, as in the simulation models, are
used, the identification of possible modelling inaccuracies is
possible. Four different test cases are considered for the three
controllers: 1) Steady-state operation, 2) No-load speed
reversal, 3) Speed reference change with nominal load, 4)
Load torque variation with constant speed.
1) Steady state operation
At steady-state operation, the load torque of the motor is 10
Nm and the speed is 20 rad/s. The phase currents of the motor
for all the examined methods are shown in Fig. 9a, whereas
the frequency spectrum is shown in Fig. 9b. The average
switching frequency of all controllers is around 1.5 kHz,
whereas the total harmonic distortion (THD) of the current is
calculated around 11%. The frequency spectrum of all
methods exhibits similar characteristics because all the
examined techniques are based on FS-MPC with no
modulator; therefore, the switching frequency is variable.
However, it is evident from Fig. 9b that the proposed PSC and
the PSCf strategies successfully mitigate the high frequency
components in the phase currents while the difference in their
THD factor is thus marginal. However, the low-order
harmonic components of the PSCf strategy are slightly higher
because they directly depend on the configuration of the filter
bandwidth. When the filter bandwidth is wide, the transient
response is improved at the expense of increased current THD.
Decreasing the sampling time of the predictive controllers, the
current THD can be considerably decreased as the higher
harmonic components are filtered out by the motor inductance.
However, the required computational resources, and
consequently the cost, are also increased.
In order for a DPSC to be implemented, the use of long
prediction horizons is mandated. However, due to the short
prediction horizon of the developed PSC, the sampling times
adopted for all strategies can be identical facilitating the
comparison (𝑇𝑠=80 𝜇s). More specifically, the average
execution time of the PTC method is found approximately 65
𝜇s, whereas the time needed for the PSC and PSCf strategies is
about 80 𝜇s. The computational effort needed for the
developed PSC is higher because of the estimation of the
speed errors, whereas the PSCf strategy needs more hardware
resources for filtering the motor currents. Most of the
execution time is needed for the state variables predictions;
however, it is also important to note that extra control loops
have been added to the control algorithm mainly serving
safety purposes. The memory requirements for executing all
methods marginally differ because the number of lookup
tables and execution loops do not considerably vary.
TABLE V
STEADY-STATE OPERATION CHARACTERISTICS
Parameter / Symbol PSC PTC PSCf
THD of phase current (%) 11.6 11.2 12.1 Speed ripple (%) 0.35 1.21 1.04
Neutral-point potential, 𝑣𝑁𝑃 (Vpp) 9.95 9.85 9.92
Furthermore, the existence of dead-time affects the
harmonic content of the current, however, this parameter has
not been considered during the design phase of the
investigated methodologies. Moreover, noise in
measurements, model inaccuracies, and mechanical resonance
between the motor and load directly affect the current shape of
all methods. All the examined steady-state characteristics are
summarized in Table V. The addition of the PI controller in
the developed method constitutes the main reason for
exhibiting less speed ripple compared to the PSCf method. The
added PI controller assists in having a more stable operation at
steady-state conditions, which is also an advantage over the
conventional DPSC strategies. However, the consideration of
the speed errors in the cost function of the PSC allows further
decrease of the speed ripple compared to the PTC method.
When using a short prediction horizon, the prediction of the
(a)
(b)
Fig. 9. Experimental results: Phase currents (a) and frequency spectrum (b) at 20 rad/s and 10 Nm. PSC, PTC and PSCf strategies (from top to bottom).
motor speed is not very accurate, but the consideration of the
speed errors assists in reducing the speed ripple because
switching combinations that cause large steps in the speed are
not considered. The speed ripple in the case of PSC is kept
low, but the mitigation of the high-frequency components is
not as effective as when using the PTC method. This can be
evidenced by the higher current THD of the PSC method. If
regulating the weights, such that both strategies exhibit the
same THD, then the speed ripple of the PSC method is
expected to increase. Furthermore, all methods manage to
keep the voltages of the DC-link capacitors well balanced and
satisfy the inverter specification since the voltage ripple is less
than 20 Vpp. However, the neutral-point potential can be
further reduced by increasing the respective weighting
coefficient, 𝜆𝑁𝑃. Finally, the proposed PSC method benefits
from the consideration of the speed dynamics thus exhibits the
lowest speed ripple compared to the other methods.
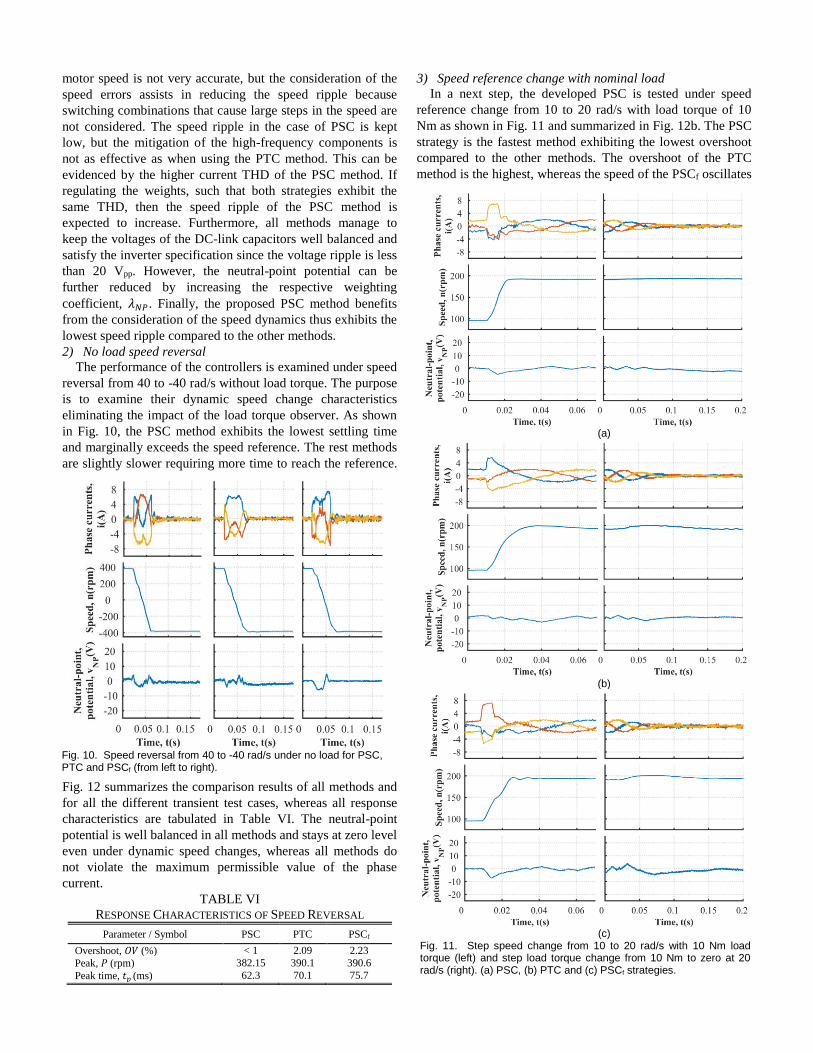
2) No load speed reversal
The performance of the controllers is examined under speed
reversal from 40 to -40 rad/s without load torque. The purpose
is to examine their dynamic speed change characteristics
eliminating the impact of the load torque observer. As shown
in Fig. 10, the PSC method exhibits the lowest settling time
and marginally exceeds the speed reference. The rest methods
are slightly slower requiring more time to reach the reference.
Fig. 12 summarizes the comparison results of all methods and
for all the different transient test cases, whereas all response
characteristics are tabulated in Table VI. The neutral-point
potential is well balanced in all methods and stays at zero level
even under dynamic speed changes, whereas all methods do
not violate the maximum permissible value of the phase
current.
TABLE VI
RESPONSE CHARACTERISTICS OF SPEED REVERSAL
Parameter / Symbol PSC PTC PSCf
Overshoot, 𝑂𝑉 (%) < 1 2.09 2.23
Peak, 𝑃 (rpm) 382.15 390.1 390.6
Peak time, 𝑡𝑝 (ms) 62.3 70.1 75.7
3) Speed reference change with nominal load
In a next step, the developed PSC is tested under speed
reference change from 10 to 20 rad/s with load torque of 10
Nm as shown in Fig. 11 and summarized in Fig. 12b. The PSC
strategy is the fastest method exhibiting the lowest overshoot
compared to the other methods. The overshoot of the PTC
method is the highest, whereas the speed of the PSCf oscillates
Fig. 10. Speed reversal from 40 to -40 rad/s under no load for PSC, PTC and PSCf (from left to right).
(a)
(b)
(c)
Fig. 11. Step speed change from 10 to 20 rad/s with 10 Nm load torque (left) and step load torque change from 10 Nm to zero at 20 rad/s (right). (a) PSC, (b) PTC and (c) PSCf strategies.
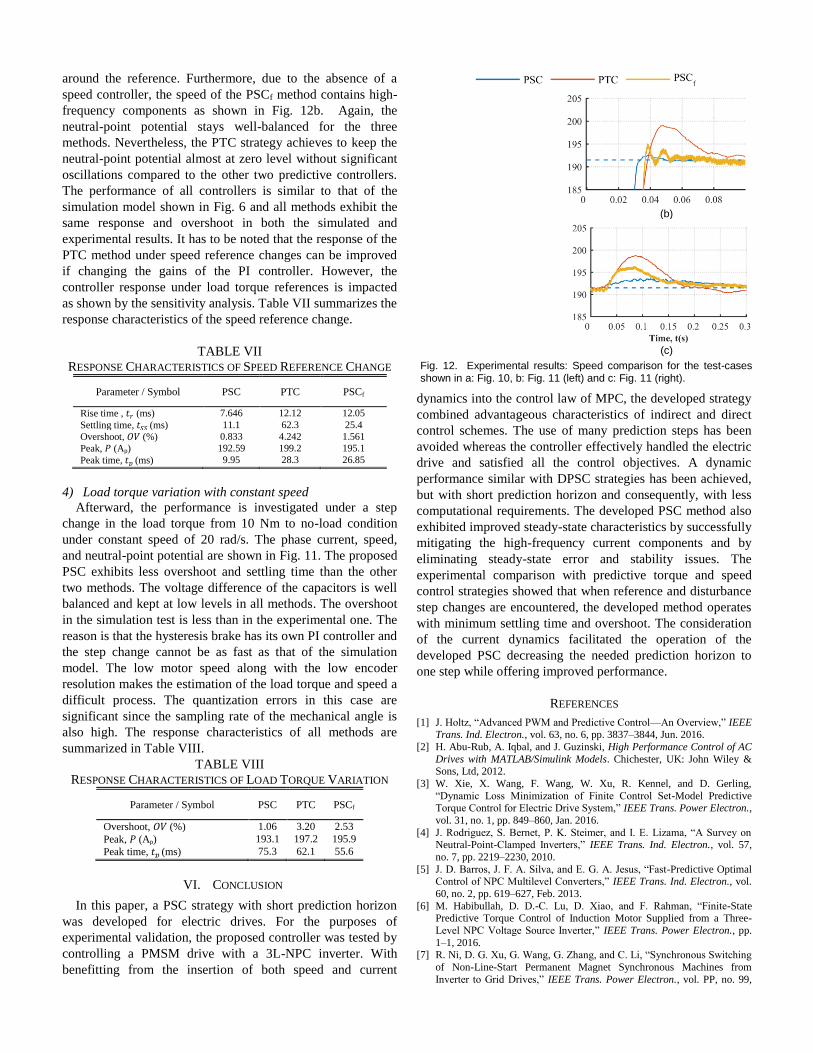
around the reference. Furthermore, due to the absence of a
speed controller, the speed of the PSCf method contains high-
frequency components as shown in Fig. 12b. Again, the
neutral-point potential stays well-balanced for the three
methods. Nevertheless, the PTC strategy achieves to keep the
neutral-point potential almost at zero level without significant
oscillations compared to the other two predictive controllers.
The performance of all controllers is similar to that of the
simulation model shown in Fig. 6 and all methods exhibit the
same response and overshoot in both the simulated and
experimental results. It has to be noted that the response of the
PTC method under speed reference changes can be improved
if changing the gains of the PI controller. However, the
controller response under load torque references is impacted
as shown by the sensitivity analysis. Table VII summarizes the
response characteristics of the speed reference change.
TABLE VII
RESPONSE CHARACTERISTICS OF SPEED REFERENCE CHANGE
Parameter / Symbol PSC PTC PSCf
Rise time , 𝑡𝑟 (ms) 7.646 12.12 12.05
Settling time, 𝑡𝑆𝑆 (ms) 11.1 62.3 25.4
Overshoot, 𝑂𝑉 (%) 0.833 4.242 1.561
Peak, 𝑃 (Ap) 192.59 199.2 195.1
Peak time, 𝑡𝑝 (ms) 9.95 28.3 26.85
4) Load torque variation with constant speed
Afterward, the performance is investigated under a step
change in the load torque from 10 Nm to no-load condition
under constant speed of 20 rad/s. The phase current, speed,
and neutral-point potential are shown in Fig. 11. The proposed
PSC exhibits less overshoot and settling time than the other
two methods. The voltage difference of the capacitors is well
balanced and kept at low levels in all methods. The overshoot
in the simulation test is less than in the experimental one. The
reason is that the hysteresis brake has its own PI controller and
the step change cannot be as fast as that of the simulation
model. The low motor speed along with the low encoder
resolution makes the estimation of the load torque and speed a
difficult process. The quantization errors in this case are
significant since the sampling rate of the mechanical angle is
also high. The response characteristics of all methods are
summarized in Table VIII.
TABLE VIII
RESPONSE CHARACTERISTICS OF LOAD TORQUE VARIATION
Parameter / Symbol PSC PTC PSCf
Overshoot, 𝑂𝑉 (%) 1.06 3.20 2.53
Peak, 𝑃 (Ap) 193.1 197.2 195.9
Peak time, 𝑡𝑝 (ms) 75.3 62.1 55.6
VI. CONCLUSION
In this paper, a PSC strategy with short prediction horizon
was developed for electric drives. For the purposes of
experimental validation, the proposed controller was tested by
controlling a PMSM drive with a 3L-NPC inverter. With
benefitting from the insertion of both speed and current
dynamics into the control law of MPC, the developed strategy
combined advantageous characteristics of indirect and direct
control schemes. The use of many prediction steps has been
avoided whereas the controller effectively handled the electric
drive and satisfied all the control objectives. A dynamic
performance similar with DPSC strategies has been achieved,
but with short prediction horizon and consequently, with less
computational requirements. The developed PSC method also
exhibited improved steady-state characteristics by successfully
mitigating the high-frequency current components and by
eliminating steady-state error and stability issues. The
experimental comparison with predictive torque and speed
control strategies showed that when reference and disturbance
step changes are encountered, the developed method operates
with minimum settling time and overshoot. The consideration
of the current dynamics facilitated the operation of the
developed PSC decreasing the needed prediction horizon to
one step while offering improved performance.
REFERENCES
[1] J. Holtz, “Advanced PWM and Predictive Control—An Overview,” IEEE Trans. Ind. Electron., vol. 63, no. 6, pp. 3837–3844, Jun. 2016.
[2] H. Abu-Rub, A. Iqbal, and J. Guzinski, High Performance Control of AC
Drives with MATLAB/Simulink Models. Chichester, UK: John Wiley & Sons, Ltd, 2012.
[3] W. Xie, X. Wang, F. Wang, W. Xu, R. Kennel, and D. Gerling,
“Dynamic Loss Minimization of Finite Control Set-Model Predictive Torque Control for Electric Drive System,” IEEE Trans. Power Electron.,
vol. 31, no. 1, pp. 849–860, Jan. 2016.
[4] J. Rodriguez, S. Bernet, P. K. Steimer, and I. E. Lizama, “A Survey on Neutral-Point-Clamped Inverters,” IEEE Trans. Ind. Electron., vol. 57,
no. 7, pp. 2219–2230, 2010.
[5] J. D. Barros, J. F. A. Silva, and E. G. A. Jesus, “Fast-Predictive Optimal Control of NPC Multilevel Converters,” IEEE Trans. Ind. Electron., vol.
60, no. 2, pp. 619–627, Feb. 2013.
[6] M. Habibullah, D. D.-C. Lu, D. Xiao, and F. Rahman, “Finite-State Predictive Torque Control of Induction Motor Supplied from a Three-
Level NPC Voltage Source Inverter,” IEEE Trans. Power Electron., pp.
1–1, 2016. [7] R. Ni, D. G. Xu, G. Wang, G. Zhang, and C. Li, “Synchronous Switching
of Non-Line-Start Permanent Magnet Synchronous Machines from
Inverter to Grid Drives,” IEEE Trans. Power Electron., vol. PP, no. 99,
(b)
(c)
Fig. 12. Experimental results: Speed comparison for the test-cases shown in a: Fig. 10, b: Fig. 11 (left) and c: Fig. 11 (right).
pp. 1–1, 2015.
[8] M. Preindl and S. Bolognani, “Model Predictive Direct Speed Control
with Finite Control Set of PMSM Drive Systems,” IEEE Trans. Power
Electron., vol. 28, no. 2, pp. 1007–1015, Feb. 2013. [9] J. Rodriguez, R. M. Kennel, J. R. Espinoza, M. Trincado, C. A. Silva, and
C. A. Rojas, “High-Performance Control Strategies for Electrical Drives:
An Experimental Assessment,” IEEE Trans. Ind. Electron., vol. 59, no. 2, pp. 812–820, Feb. 2012.
[10] J. Richter and M. Doppelbauer, “Predictive Trajectory Control of
Permanent-Magnet Synchronous Machines With Nonlinear Magnetics,” IEEE Trans. Ind. Electron., vol. 63, no. 6, pp. 3915–3924, Jun. 2016.
[11] H. Abu-Rub, M. Malinowski, and K. Al-Haddad, Power Electronics for Renewable Energy Systems, Transportation and Industrial Applications.
Chichester, UK: John Wiley & Sons, Ltd, 2014.
[12] J. Bocker, B. Freudenberg, A. The, and S. Dieckerhoff, “Experimental Comparison of Model Predictive Control and Cascaded Control of the
Modular Multilevel Converter,” IEEE Trans. Power Electron., vol. 30,
no. 1, pp. 422–430, Jan. 2015. [13] P. Kakosimos, M. Beniakar, Y. Liu, and H. Abu-Rub, “Model Predictive
Control for Permanent Magnet Synchronous Motor Drives Considering
Cross-Saturation Effects,” in 32nd IEEE Applied Power Electronics
Conference and Exposition, 2017, pp. 1880–1885.
[14] H. Abu-Rub, J. Guzinski, Z. Krzeminski, and H. A. Toliyat, “Predictive
Current Control of Voltage-Source Inverters,” IEEE Trans. Ind. Electron., vol. 51, no. 3, pp. 585–593, Jun. 2004.
[15] S. Chai, L. Wang, and E. Rogers, “A Cascade MPC Control Structure for
a PMSM With Speed Ripple Minimization,” IEEE Trans. Ind. Electron., vol. 60, no. 8, pp. 2978–2987, Aug. 2013.
[16] M. Preindl and S. Bolognani, “Model Predictive Direct Torque Control
With Finite Control Set for PMSM Drive Systems, Part 1: Maximum Torque Per Ampere Operation,” IEEE Trans. Ind. Informatics, vol. 9, no.
4, pp. 1912–1921, Nov. 2013.
[17] H. Miranda, P. Cortes, J. I. Yuz, and J. Rodriguez, “Predictive Torque Control of Induction Machines Based on State-Space Models,” IEEE
Trans. Ind. Electron., vol. 56, no. 6, pp. 1916–1924, Jun. 2009.
[18] C. A. Rojas, S. Kouro, M. Perez, and F. Villarroel, “Multiobjective Fuzzy Predictive Torque Control of an induction machine fed by a 3L-NPC
inverter,” in IEEE International Symposium on Predictive Control of
Electrical Drives and Power Electronics, 2015, pp. 21–26. [19] E. Fuentes, D. Kalise, J. Rodriguez, and R. M. Kennel, “Cascade-Free
Predictive Speed Control for Electrical Drives,” IEEE Trans. Ind.
Electron., vol. 61, no. 5, pp. 2176–2184, May 2014. [20] E. J. Fuentes, C. A. Silva, and J. I. Yuz, “Predictive Speed Control of a
Two-Mass System Driven by a Permanent Magnet Synchronous Motor,”
IEEE Trans. Ind. Electron., vol. 59, no. 7, pp. 2840–2848, Jul. 2012. [21] S. Bolognani, S. Bolognani, L. Peretti, and M. Zigliotto, “Design and
Implementation of Model Predictive Control for Electrical Motor
Drives,” IEEE Trans. Ind. Electron., vol. 56, no. 6, pp. 1925–1936, Jun. 2009.
[22] X. Wang, W. Xu, Y. Zhao, and X. Li, “Modified MPC Algorithm for
NPC Inverter Fed Disc Coreless Permanent Magnet Synchronous Motor,” IEEE Trans. Appl. Supercond., pp. 1–1, 2016.
[23] S. Vazquez, R. Aguilera, P. Acuna, J. Pou, J. Leon, L. Franquelo, and V.
Agelidis, “Model Predictive Control for Single-Phase NPC Converters Based on Optimal Switching Sequences,” IEEE Trans. Ind. Electron., pp.
1–1, 2016.
[24] L. Wang, S. Chai, D. Yoo, L. Gan, and K. Ng, PID and Predictive Control of Electrical Drives and Power Converters using
Matlab/Simulink. John Wiley & Sons Singapore Pte Ltd, 2015.
[25] J. Rodriguez, M. P. Kazmierkowski, J. R. Espinoza, P. Zanchetta, H. Abu-Rub, H. A. Young, and C. A. Rojas, “State of the Art of Finite
Control Set Model Predictive Control in Power Electronics,” IEEE Trans. Ind. Informatics, vol. 9, no. 2, pp. 1003–1016, May 2013.
[26] V. Yaramasu, B. Wu, M. Rivera, M. Narimani, S. Kouro, and J.
Rodriguez, “Generalised approach for predictive control with common-mode voltage mitigation in multilevel diode-clamped converters,” IET
Power Electron., vol. 8, no. 8, pp. 1440–1450, Aug. 2015.
[27] R. Vargas, P. Cortes, U. Ammann, J. Rodriguez, and J. Pontt, “Predictive Control of a Three-Phase Neutral-Point-Clamped Inverter,” IEEE Trans.
Ind. Electron., vol. 54, no. 5, pp. 2697–2705, Oct. 2007.
[28] P. Kakosimos, K. Pavlou, A. Kladas, and S. Manias, “A single-phase nine-level inverter for renewable energy systems employing model
predictive control,” Energy Convers. Manag., vol. 89, pp. 427–437, Jan.
2015.
[29] V. Yaramasu and B. Wu, “Predictive Control of a Three-Level Boost Converter and an NPC Inverter for High-Power PMSG-Based Medium
Voltage Wind Energy Conversion Systems,” IEEE Trans. Power
Electron., vol. 29, no. 10, pp. 5308–5322, Oct. 2014. [30] M. Preindl and S. Bolognani, “Model Predictive Direct Torque Control
With Finite Control Set for PMSM Drive Systems, Part 2: Field
Weakening Operation,” IEEE Trans. Ind. Informatics, vol. 9, no. 2, pp. 648–657, May 2013.
[31] C. A. Rojas, J. I. Yuz, M. Aguirre, and J. Rodriguez, “A comparison of
discrete-time models for model predictive control of induction motor drives,” in IEEE International Conference on Industrial Technology,
2015, pp. 568–573.