pascal lambrechts u.c.l. (belgium)...
TRANSCRIPT

The Poincare conjecture and the shape of the universe
Pascal LambrechtsU.C.L. (Belgium)
Wellesley CollegeMarch 2009

Poincare conjecture: A century in two minutes
Henri Poincare (1854-1912).He invented algebraic topology.It is a theory for distinguishing “shapes” of geometricobjects through algebraic computations.
1904: Poincare asks whether algebraic topology is powefull enough tocharacterize the shape of the 3-dimensional “hypersphere”.2002: Grigori Perelman (1966- ) proves that the answer to Poincare’squestion is YES (⇒ Fields medal.)
Theorem (Perelman, 2002)
Any closed manifold of dimension 3 whose fundamentalgroup is trivial is homeomorphic to the hypersphere S3.

What is the shape of the universe ?
Poincare conjecture is related to the following problem:
What ”shape” can a three-dimensional “space” have ?
For example: what is the “shape” of the universe in which we live ?
The earth is locally flat but it is not an infinite plane.The earth has no boundary, so it is not a flat disk.The earth is a sphere: A finite surface which has no boundary.There is no reason why our universe should have the shape of the3-dimensional Euclidean space.The universe could be finite without boundary.

1 equation with 2 unknowns =⇒ a curve
y = x − 1S is a line
x2 + y2 = 1S is a circle
y = x2 + x − 2S is a parabola
xy = 1S is a hyperbola
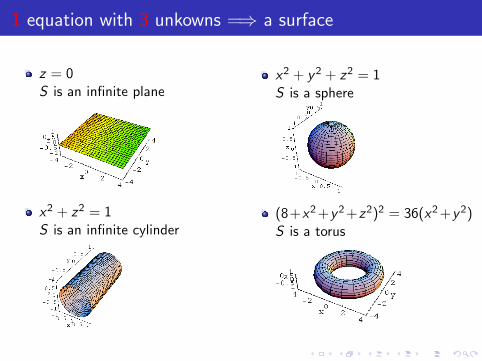
1 equation with 3 unkowns =⇒ a surface
z = 0S is an infinite plane
x2 + z2 = 1S is an infinite cylinder
x2 + y2 + z2 = 1S is a sphere
(8+x2+y2+z2)2 = 36(x2+y2)S is a torus

2 equations with 3 unknowns =⇒ a curve
{x2 + y2 + z2 = 1z = 0
The set of solutions S is a circle.

dimension = # unknowns − # equations
x2 + y2 = 1The circle: dim = 2− 1 = 1
{x2 + y2 + z2 = 1z = 0
The circle: dim = 3− 2 = 1
x2 + y2 + z2 = 1The sphere: dim = 3− 1 = 2
x2 + y2 + z2 + t2 = 1dim = 4− 1 = 3
The hypersphere of dimension 3
.

Manifold of dimension d
Definition
A manifold of dimension d or d-manifold is a geometric object that locallylooks like a Euclidean space Rd of dimension d .
Examples:
d = 1 : curves (circle, line, hyperbola, ...)
d = 2 : surfaces (sphere, plane, torus, ...)
d = 3 : hypersphere, “the universe”,...
In this talk we will only consider d-manifolds that are:
“finite” (not the line, or the parabola, or the plane)
connected, so it is in one piece (not the hyperbola)
without boundary (not a disk, nor a segment)
Restatement of Poincare’s problem
The question asked by Poincare:
Give an easy criterion that enables us to recognize that a given3-manifold has the same shape as the 3-dimensional hypersphere.
More generally Poincare was looking for a classification of possible shapesof all 3-manifolds.
Let us begin with an easier problem:
The classification of shapes of manifolds of dimension 1 and 2.

Classification of the shapes of 1-manifolds, i.e. of curves
Theorem (Classification of 1-manifolds)
Any curve (finite, connected, without boundary) has the shape of a circle.
These three figures have the same shape, i.e. they are homeomorphic:
One can deform one into another (“rubber geometry”)
A tiny observer living on the curves, could not distinguish them.

Examples of 2-manifolds, i.e. of surfaces
Shape of a sphere
Shape of a torus with two holes
Shape of a torus
Shape of a Klein bottle

Another Klein bottle

Classification of the shapes of 2-manifolds, i.e. of surfaces
Theorem (Classification of surfaces)
Any surface (finite, connected, without boundary) has the same shape as atorus with g = 0, 1, 2, 3, . . . holes or as the unorientable version of ag -torus.
Explanations:
By definition the torus with 0 holes is the sphere.
The Klein bottle is the unorientable version of the torus with one hole.
Each torus with g holes has exactly one unorientable “sister.”
The following is a complete list of surfaces (up to homeomorphism):
+ unorientable versions.

How do we recognize a given surface in this list?
The classification theorem of surfaces tells us that in order to recognizethe shape of a surface it is enough to:
1 Know its genus g , that is the number of holes, and
2 Know whether it is orientable or not.
How do we proceed in practice to determine g ?For example: how many holes do the following two surfaces have ?

Poincare’s criterion for recognizing whether a surface is asphere
The sphere is the only surface that fullfills the “Poincare’s criterion”:
every closed loop can be shrunk to a point.
Poincare conjecture
The hypersphere is the only 3-manifold for which every closed loop can beshrunk to a point.

Poincare’s criterion for recognizing whether a surface is asphere
The sphere is the only surface that fullfills the “Poincare’s criterion”:
every closed loop can be shrunk to a point.
Poincare conjecture
The hypersphere is the only 3-manifold for which every closed loop can beshrunk to a point.

Digression:
Curvature and geometry.
Topology Study of global shapes. “Rubber geometry.”
Geometry Study of objets on which one can measure lengths andangles. Notion of curvature.

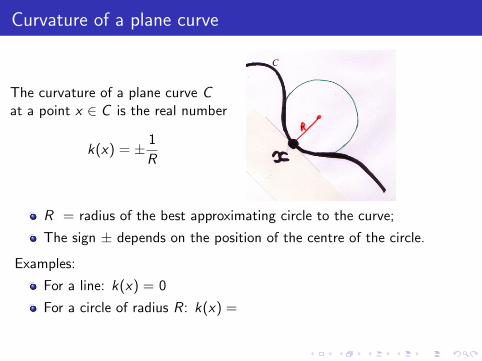
Curvature of a plane curve
The curvature of a plane curve Cat a point x ∈ C is the real number
k(x) = ± 1
R
R = radius of the best approximating circle to the curve;
The sign ± depends on the position of the centre of the circle.
Examples:
For a line: k(x) =
0
For a circle of radius R: k(x) = ±1/R
For a sine curve : k(x) oscillates between −1 et 1

Curvature of a plane curve
The curvature of a plane curve Cat a point x ∈ C is the real number
k(x) = ± 1
R
R = radius of the best approximating circle to the curve;
The sign ± depends on the position of the centre of the circle.
Examples:
For a line: k(x) = 0
For a circle of radius R: k(x) = ±1/R
For a sine curve : k(x) oscillates between −1 et 1
Curvature of a plane curve
The curvature of a plane curve Cat a point x ∈ C is the real number
k(x) = ± 1
R
R = radius of the best approximating circle to the curve;
The sign ± depends on the position of the centre of the circle.
Examples:
For a line: k(x) = 0
For a circle of radius R: k(x) =
±1/R
For a sine curve : k(x) oscillates between −1 et 1

Curvature of a plane curve
The curvature of a plane curve Cat a point x ∈ C is the real number
k(x) = ± 1
R
R = radius of the best approximating circle to the curve;
The sign ± depends on the position of the centre of the circle.
Examples:
For a line: k(x) = 0
For a circle of radius R: k(x) = ±1/R
For a sine curve : k(x) oscillates between −1 et 1

Curvature of a plane curve
The curvature of a plane curve Cat a point x ∈ C is the real number
k(x) = ± 1
R
R = radius of the best approximating circle to the curve;
The sign ± depends on the position of the centre of the circle.
Examples:
For a line: k(x) = 0
For a circle of radius R: k(x) = ±1/R
For a sine curve : k(x)
oscillates between −1 et 1

Curvature of a plane curve
The curvature of a plane curve Cat a point x ∈ C is the real number
k(x) = ± 1
R
R = radius of the best approximating circle to the curve;
The sign ± depends on the position of the centre of the circle.
Examples:
For a line: k(x) = 0
For a circle of radius R: k(x) = ±1/R
For a sine curve : k(x) oscillates between −1 et 1

Gaussian curvature of a surface
The Gaussian curvature of a surface at apoint x is the real number
K (x) := kmin(x) · kmax(x)
where kmin is the minimal curvature of acurve on the surface passing through xinside a normal plane to the surface, andanalogously kmax is the maximal curvatureof such a curve.
K (x) = 1R1· 1
R2> 0 K (x) = 0 · 0 = 0 K (x) = 1
R1· −1
R2< 0

The Gaussian curvature K is invariant under isometries
A priori it seems that the Gaussian curvature K (x) depends on the waythe surface is embedded in the 3-dimensional euclidean space R3.Actually it does not: It only depends on the intrinsic geometry of thesurface, i.e. on the way lengths are measured on the surface.
Theorema egregium (Gauss, 1828)
If a map f : S1 → S2 between two surfaces S1 and S2 embedded in R3
preserves inside lengths then it also preserves Gaussian curvature:
K (f (x)) = K (x).
The pizza corollary
If a surface S is isometric to a subset of the plane then its Gaussiancurvature is zero everywhere:
kmin(x) · kmax(x) = 0.

The Gaussian curvature K is invariant under isometries
A priori it seems that the Gaussian curvature K (x) depends on the waythe surface is embedded in the 3-dimensional euclidean space R3.Actually it does not: It only depends on the intrinsic geometry of thesurface, i.e. on the way lengths are measured on the surface.
Theorema egregium (Gauss, 1828)
If a map f : S1 → S2 between two surfaces S1 and S2 embedded in R3
preserves inside lengths then it also preserves Gaussian curvature:
K (f (x)) = K (x).
The pizza corollary
If a surface S is isometric to a subset of the plane then its Gaussiancurvature is zero everywhere:
kmin(x) · kmax(x) = 0.

The round sphere is not isometric to a portion of the plane
The cartographer’s nightmare corollary
It is impossible to draw a map representing the surface of the earth on aplane in such a way that distances are preserved (or scaled).
Mercator Planisphere (1512 – 1594)

Positive and negative Gaussian curvatures
K > 0
The sum of the anges of atriangle > 180◦
The area of a disk ofradius R is < 2πR2
Spherical geometry
K < 0
The sum of the anges of atriangle < 180◦
The area of a disk ofradius R is > 2πR2
Hyperbolic geometry

Curvature of manifolds of dimension d ≥ 3
Gaussian curvature can be generalized in dimension ≥ 3:
The Ricci curvature.
This curvature measures how much the geometry of the manifold differsfrom Euclidean geometry.
In general relativity, the Ricci curvature is the main ingredient to quantifyhow much mass and energy deform the space-time geometry.

Link between curvature andtopology

Difference between topology and geometry.
Topology is the study of “global shapes” of geometric objects.Objects are flabby.
Geometry is the study of properties related to the “length” ongeometric objects.Objects are more rigid: we cannot stretch them.
Curvature is an invariant of geometry (theorema egregium)
Is there a link between curvature and the global shape of a manifold ?
K (x) = 1/R2 is constant K (x) is very variable
At first sight: No link between curvature and topology of the sphere.

Curvature constraints topology
K := mean value of the Gaussian curvature of a surfacearea(S) := area of the surfaceg := number of holes (or genus) of the surface.
Theorem (Gauss-Bonnet)
K · area(S) = 4π(1− g)
Corollary
For a surface S with a homogeneous geometry, we have
if K (x) > 0 then S is a sphere;
if K (x) = 0 then S is a torus (with one hole);
if K (x) < 0 then S is a torus with g ≥ 2 holes;
or their non-orientable variants.
Conclusion: for a homogeneous surface (that is, with constant curvature),the sign of the curvature partially determines the topology.

Poincare conjecture for homogeneous 3-manifolds
Theorem
A manifold of dimension d whose curvature at any point is constant andthat satisfies Poincare criterion (any closed loop can be shrunk to a point)is isometric to the round hypersphere of dimension d .
This theorem implies that Poincare conjecture is true for manifoldswith constant curvature, i.e. with homogeneous geometry.
This theorem was known for a long time and is not difficult to prove.
Idea of the proof:
A space with constant curvature is locally isometric to the roundhypersphere.Poincare criterion implies that when we glue together the local patchesisometric to portions of hypersphere we get the genuine hypersphereand not some variant like its unorientable version.

Perelman’s proof of the Poincare conjecture
Theorem (Perelman, 2002)
Any 3-manifold in which any closed loop can be deformed into a point ishomeomorphic to the hypersphere of dimension 3.
The proof follows a program initiated by Richard Hamilton (1982)1 Equip the manifold with an arbitrary geometry.2 Let the geometry of this 3-manifold “cool down”.3 After some time the curvature becomes constant.4 Therefore it is the hypersphere . QED

Examples of 3-manifolds otherthan the hypersphere.
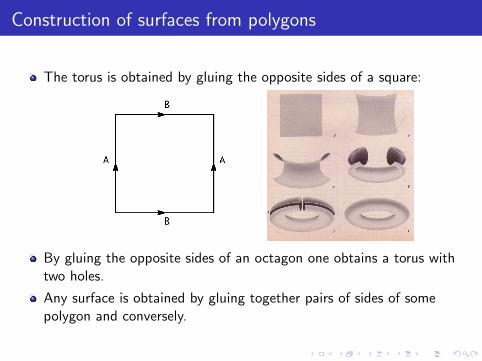
Construction of surfaces from polygons
The torus is obtained by gluing the opposite sides of a square:
By gluing the opposite sides of an octagon one obtains a torus withtwo holes.
Any surface is obtained by gluing together pairs of sides of somepolygon and conversely.

Construction of 3-manifolds from polyhedra
The “hypertorus” is the 3-manifold obtained from a plain cube bygluing together the oppposite faces.
Poincare invented a space obtained by gluing together the oppositepentagonal faces of a plain dodecahedron.
Any 3-manifold is obtained from a plain polyhedron whose faces areidentified in pairs.

If the universe was a hypertorus
Imagine that the universe is a hypertorus (i.e. the cube with the parallelfaces identified) with a homogeneous geometry

Two dodecahedric universes
The dodecahedric 3-manifold ofPoincare
Curvature > 0
The dodecahedric 3-manifold ofSeifert-WeibelCurvature < 0

Conclusion
Perelman proved much more: It appears that he has completelycharacterized all 3-manifolds by their geometry, achieving a researchprogram initiated by William Thurston in 1982.The classification of 3-manifolds may soon be completed !!!
And in dimension > 3?
Dimension d = 4. The analog of the Poincare conjecture was provedin 1982 (M. Freedman).But there are still mysterious phenomena in dimension 4.
Dimensions d ≥ 5: the classification of d-manifolds has been wellunderstood since the end of the 1960’s !The analog of the Poincare conjecture was proved in 1961 (S. Smale).
And the shape of the universe ?Until recently, it had been speculated that it could be the dodecahedricPoincare space!!! It seems that very recently this speculation was ruledout.

Conclusion
Perelman proved much more: It appears that he has completelycharacterized all 3-manifolds by their geometry, achieving a researchprogram initiated by William Thurston in 1982.The classification of 3-manifolds may soon be completed !!!
And in dimension > 3?
Dimension d = 4. The analog of the Poincare conjecture was provedin 1982 (M. Freedman).But there are still mysterious phenomena in dimension 4.
Dimensions d ≥ 5: the classification of d-manifolds has been wellunderstood since the end of the 1960’s !The analog of the Poincare conjecture was proved in 1961 (S. Smale).
And the shape of the universe ?Until recently, it had been speculated that it could be the dodecahedricPoincare space!!! It seems that very recently this speculation was ruledout.

A few references
Jeffrey Weeks “The shape of space”.An introductory book for the notion of shape and for the shape of theuniverse.
W. Thurston et J. Weeks “The Mathematics of Three-dimensionalManifolds” . Scientific American, vol. 251, July 1984, p. 108.A very readable paper on the classification project for 3-manifoldsbased on their geometry.
J. Weeks “The Poincare dodecahedral space and the mystery of themissing fluctuations” Notices A.M.S., Vol. 51 (2004), pp. 610-619.An article for mathematicians showing some experimental evidencesthat the universe could be the dodecahedric Poincare space.
W. Thurston “Three-dimensional geometry and topology”An excellent book in which a few chapters are readable by amotivated student in mathematics.
http://www.geometrygames.org/CurvedSpaces“A flight simulator”in 3-manifolds with homogeneous geometries.