parametric resonance in immersed elastic...
TRANSCRIPT

Parametric Resonance inImmersed Elastic Boundaries
John Stockie
Department of MathematicsSimon Fraser University
Burnaby, British Columbia, Canada
[email protected]://www.math.sfu.ca/˜stockie/
November 2, 2004

Acknowledgments
Ricardo Cortez Douglas Varela Charles PeskinTulane University CalTech Courant Institute
Natural Sciences and Engineering
Research Council of Canada
TEXpower document class: http://ls1-www.cs.uni-dortmund.de/˜lehmke/texpower/
University of Washington – Nov. 2, 2004 2

Outline
1. Review of
• “normal” resonance =⇒ external forcing• parametric resonance =⇒ internal forcing
2. Floquet stability analysis for parametrically-excited springs
3. Immersed boundary model
4. Parametric resonance in immersed boundaries
5. Numerical simulations
6. Summary and future work
University of Washington – Nov. 2, 2004 3

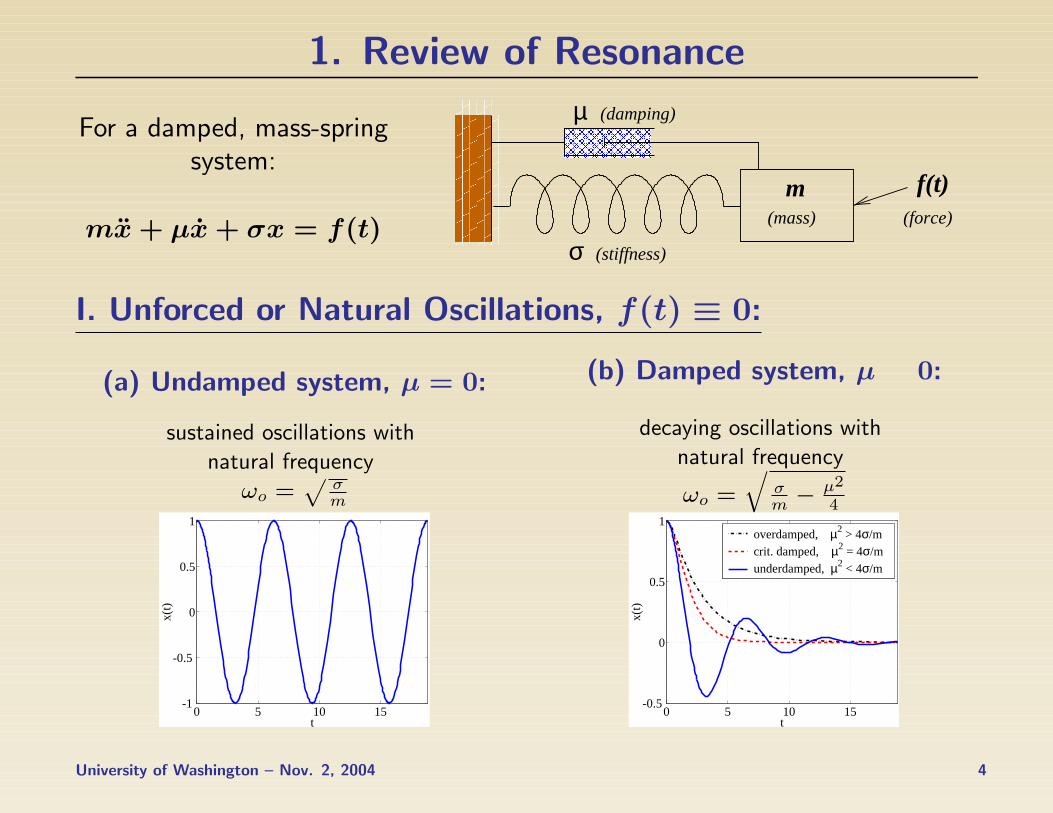
1. Review of Resonance
For a damped, mass-springsystem:
mx + µx + σx = f(t)
f(t)
µ (damping)
σ (stiffness)
m(mass) (force)
1. Review of Resonance
For a damped, mass-springsystem:
mx + µx + σx = f(t)
f(t)
µ (damping)
σ (stiffness)
m(mass) (force)
I. Unforced or Natural Oscillations, f(t) ≡ 0:
(a) Undamped system, µ = 0: (b) Damped system, µ > 0:
sustained oscillations with
natural frequency
ωo =√
σm
decaying oscillations with
natural frequency
ωo =
√σm −
µ2
4
0 5 10 15−1
−0.5
0
0.5
1
t
x(t)
Student Version of MATLAB
0 5 10 15−0.5
0
0.5
1
t
x(t)
overdamped, µ2 > 4σ/m crit. damped, µ2 = 4σ/munderdamped, µ2 < 4σ/m
Student Version of MATLAB
University of Washington – Nov. 2, 2004 4

II. Externally-forced Oscillations:
The system is subjected to an external periodic force(modeled as a separate term in the DE)
mx + µx + σx = Fo cos ωt
Resonance occurs when forcing is close to the natural frequency=⇒ amplitude of resulting oscillations grows when undamped (µ = 0)
(a) Undamped, non-resonant(µ = 0, ω 6= ωo):
(b) Undamped, resonant(µ = 0, ω = ωo):
persistent, mixed-frequency oscillations unstable, unbounded oscillations
0 5 10 15−6
−4
−2
0
2
4
t
x(t)
Student Version of MATLAB
0 5 10 15−60
−40
−20
0
20
40
t
x(t)
Student Version of MATLAB
University of Washington – Nov. 2, 2004 5

(c) With damping (µ > 0) — “real” systems:
• oscillations are bounded, transient dies out, and forcing persists
• resonance appears as a peak in max. amplitude, only if µ2 < 12σ
2
0 5 10 15 20 25 30−4
−2
0
2
4
t
x(t)
Student Version of MATLAB
0 1 2 3 4 50
0.05
0.1
0.15
0.2
ωres
µ2 < σ2/2
µ2 > σ2/2
Forcing frequency, ω
Am
plitu
de,
A(ω
)
Student Version of MATLAB
Compare to the frequency–response curve for the undamped system:
0 1 2 3 4 50
0.5
1
1.5
2
Forcing frequency, ω
Am
plitu
de,
A(ω
)
Student Version of MATLAB
University of Washington – Nov. 2, 2004 6

III. Internal forcing:
Oscillations can also be excited via periodic variation in a system parameter:
mx + µx + σ(t)x = 0
σ(t) periodic: σ(t) = σ(t+ T ) =⇒ Hill’s equation (1886)
special case: σ(t) = σo(1 + 2ε cosωt) =⇒ Mathieu equation (1868)
Compare:• Solution can become unstable whether or not µ = 0 !
=⇒ called parametric resonance
• The system responds at frequency 12 ω [ Why? ]
• Internal forcing can also stabilize systems that are otherwiseunstable
e.g., inverted pendulum with gravitationalmodulation
ω
University of Washington – Nov. 2, 2004 7

A Heuristic Look at Parametric ResonanceTake m = 1, µ = 0, and treat the periodic term as a forcing term:
x + ω2ox = −2εω2
o(cos ωt)x
where ω2o = σo.
First solve the homogeneous problem:
x+ ω2ox = 0 =⇒ x(t) = A cos(ωot− ϕ)
Substitute into the right hand side:
x+ ω2ox = −2Aεω2
o cosωt cos(ωot− ϕ)
= −Aεω2o
cos
[(ω + ωo)t− ϕ
]+ cos
[(ω − ωo)t− ϕ
]Resonance ensues if ω − ωo = ωo or ωo = 1
2 ω
responsefrequency = 1
2
(forcing
frequency
)University of Washington – Nov. 2, 2004 8

Examples of Parametric Resonance
• Springs or pendula with moving supports

Examples of Parametric Resonance
• Springs or pendula with moving supports
• RLC circuits with periodically-varying inductance or capacitance

Examples of Parametric Resonance
• Springs or pendula with moving supports
• RLC circuits with periodically-varying inductance or capacitance
• A child pumping a swing [Curry, 1976]

Examples of Parametric Resonance
• Springs or pendula with moving supports
• RLC circuits with periodically-varying inductance or capacitance
• A child pumping a swing [Curry, 1976]
• Solar surface heating generating atmospheric convection cells or patternedground formation [McKay, 1998]

Examples of Parametric Resonance
• Springs or pendula with moving supports
• RLC circuits with periodically-varying inductance or capacitance
• A child pumping a swing [Curry, 1976]
• Solar surface heating generating atmospheric convection cells or patternedground formation [McKay, 1998]
• Surface waves in fluids and granular materials =⇒ Faraday instability[Faraday, 1831; Benjamin & Ursell, 1954]

Examples of Parametric Resonance
• Springs or pendula with moving supports
• RLC circuits with periodically-varying inductance or capacitance
• A child pumping a swing [Curry, 1976]
• Solar surface heating generating atmospheric convection cells or patternedground formation [McKay, 1998]
• Surface waves in fluids and granular materials =⇒ Faraday instability[Faraday, 1831; Benjamin & Ursell, 1954]
• Two-fluid interfaces [Kumar & Tuckerman, 1994]
• Bubble oscillations and sonoluminescence [Brenner, Lohse & Dupont, 1995]
• Many problems in aerodynamics involving wing stability and flutter (butwing oscillations are small and have no influence on the flow)
There are many examples in fluids, but almost no analysis for fluid-structureinteraction problems.
University of Washington – Nov. 2, 2004 9

Faraday Waves
ω
F (t) = mg(1 + 2ε cosωt)
Faraday (1831) observed that:
• regular, symmetric patterns arise on the surface
• waves oscillate with twice the period of the parametric forcing
Stripes (1-fold symmetry) Squares (2-fold symmetry) Hexagons (3-fold symmetry)
Source: Dept. of Physics, University of Torontohttp://mobydick.physics.utoronto.ca/faraday.html
University of Washington – Nov. 2, 2004 10

Some Results from Floquet Theory
For homogeneous, periodic, linear systems:
x = A(t) · x, where A(t) ∈ Rn×n, x(t) ∈ Rn (*)
and A(t+ T ) = A(t), for some T > 0.
Floquet Theorem (Bloch Theorem in solid state physics):
Every fundamental matrix solution X(t) of (*) has the form:
X(t) = eBt · P (t)
where P (t+ T ) = P (t) and B = constant.
Corollary: Any solution of(*) is a linear combination offunctions of the form: eγt · p(t)
1
HHHH
HHj
“Floquet” or
characteristic exponent, γ ∈ C
a polynomial with
T-periodic coefficients
University of Washington – Nov. 2, 2004 11
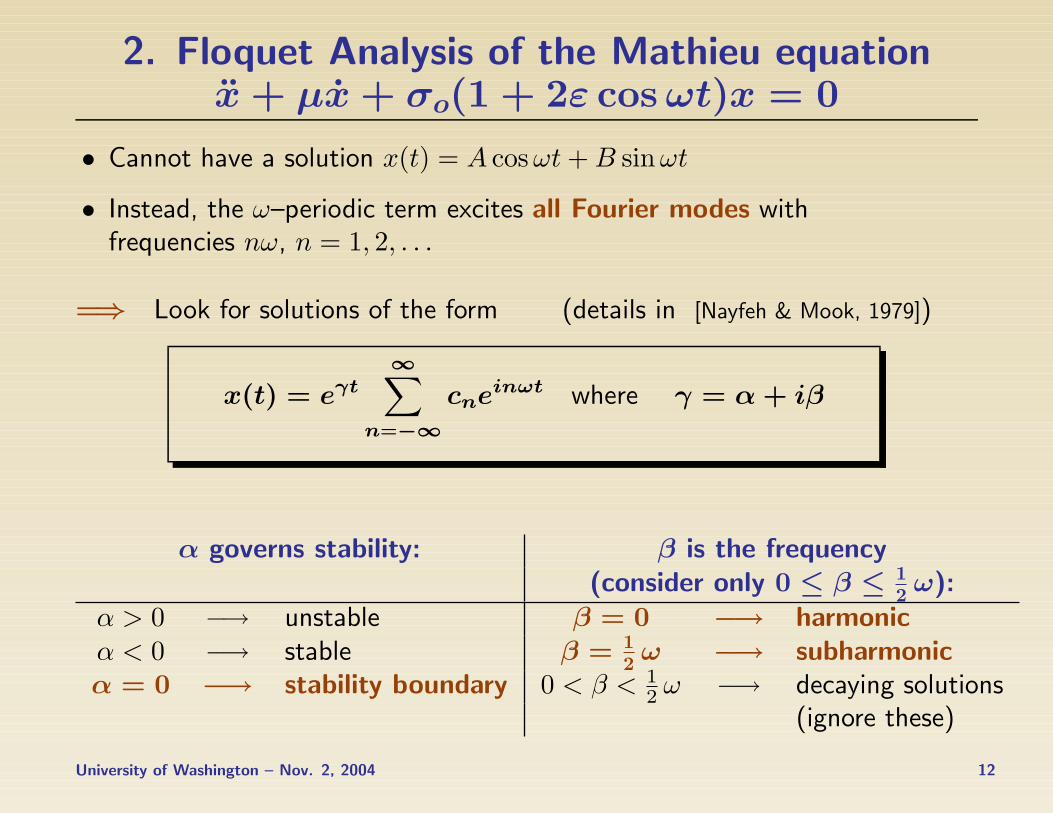
2. Floquet Analysis of the Mathieu equationx + µx + σo(1 + 2ε cos ωt)x = 0
• Cannot have a solution x(t) = A cosωt+B sinωt
• Instead, the ω–periodic term excites all Fourier modes withfrequencies nω, n = 1, 2, . . .
=⇒ Look for solutions of the form (details in [Nayfeh & Mook, 1979])
x(t) = eγt∞∑
n=−∞cneinωt where γ = α + iβ
α governs stability: β is the frequency(consider only 0 ≤ β ≤ 1
2 ω):α > 0 −→ unstable β = 0 −→ harmonicα < 0 −→ stable β = 1
2 ω −→ subharmonicα = 0 −→ stability boundary 0 < β < 1
2 ω −→ decaying solutions(ignore these)
University of Washington – Nov. 2, 2004 12

Substitute
x(t) =∞∑
n=−∞cne
(γ+inω)t into x+ µx+ σo(1 + 2ε cosωt)x = 0
Interested only in the stability boundary where α = 0 (i.e., γ = 0 + iβ):
∞∑n=−∞
cnei(β+nω)t
−(β + nω)2+ iµ(β + nω) + σo
1 + ε(eiωt
+ e−iωt
)︸ ︷︷ ︸
shifts n by ±1
= 0

Substitute
x(t) =∞∑
n=−∞cne
(γ+inω)t into x+ µx+ σo(1 + 2ε cosωt)x = 0
Interested only in the stability boundary where α = 0 (i.e., γ = 0 + iβ):
∞∑n=−∞
cnei(β+nω)t
−(β + nω)2+ iµ(β + nω) + σo
1 + ε(eiωt
+ e−iωt
)︸ ︷︷ ︸
shifts n by ±1
= 0
=⇒ [σo − (β + nω)2 + iµ(β + nω)]cn + εσo(cn−1 + cn+1) = 0 (**)
Aim: To find real values of ε:
• split (**) into real and imaginary parts,
• let cn = crn + icin, and . . .
University of Washington – Nov. 2, 2004 13

define ~c = [. . . , crn−1, cin−1, c
rn, c
in, . . . ]
T so (**) can be written in matrix form:. . .
0 0 An −Bn 0 00 0 Bn An 0 0
. . .
~c+ εσo
. . .
1 0 0 0 1 00 1 0 0 0 1
. . .
~c = 0
University of Washington – Nov. 2, 2004 14

define ~c = [. . . , crn−1, cin−1, c
rn, c
in, . . . ]
T so (**) can be written in matrix form:. . .
0 0 An −Bn 0 00 0 Bn An 0 0
. . .
︸ ︷︷ ︸
D
~c+ εσo
. . .
1 0 0 0 1 00 1 0 0 0 1
. . .
︸ ︷︷ ︸
E
~c = 0
where An = σo − (β + nω)2 and Bn = µ(β + nω).
More compactly:
(−σoD−1E)~c =(
1
ε
)~c,
An infinite-dimensional eigenvalue problem witheigenvalues 1
ε, and
eigenvectors ~c.
University of Washington – Nov. 2, 2004 14

Details:
• Cut off at a finite N , i.e.,∞∑−∞
−→N∑−N
(since cn → 0 as |n| → ∞)
• Apply “reality conditions”:
c−n = c∗n, if β = 0 (harmonic) c−n = c∗n−1, if β = 1
2 ω (subharmonic)
to eliminate all cn with n < 0 =⇒ a (2N + 2)× (2N + 2) linear system
• Parameter values:µ, ω: given
α = 0: for stability boundariesβ = 0, 1
2 ω: for harmonic/subharmonic casesN = 15: chosen so that |cn| 1 for all |n| > N
ε: comes from solving the eigenvalue problemσo: is a free parameter
Basic Idea: for each σo, we obtain 2N + 2 values of ε. . . pick the positive, real ones.
University of Washington – Nov. 2, 2004 15

Stability of the Mathieu equationx + µx + σo(1 + 2ε cos ωt)x = 0
Ince-Strutt Diagram (ω = 2, µ = 0):
5 10 15 20 25 300
5
10
15
20
σ0
ε σ 0
ε=1/2
ω=2, µ=0
1 4 9 16 25
unst
able
stabl
e
stabl
eun
stab
le
... = harmonic (β = 0)
... = subharmonic (β = 12 ω)
• Eigenvalues divide the planeinto stable and unstable regions=⇒ tongues of instability
• ε ≤ 12 are “physical” eigenvalues
• ε = 0 gives natural modes,σo = n2
University of Washington – Nov. 2, 2004 16

Stability of the Mathieu equationx + µx + σo(1 + 2ε cos ωt)x = 0
5 10 15 20 25 300
5
10
15
20
σo
ε σ o
ε=1/2
ω=2, µ=0.0, 0.6
ε=1/2
Increase damping further to µ = 0.6=⇒ no more physical instabilities
University of Washington – Nov. 2, 2004 16

Stability of the Mathieu equationx + µx + σo(1 + 2ε cos ωt)x = 0
5 10 15 20 25 300
5
10
15
20
σo
ε σ o
ε=1/2
ω=2, µ=0.0, 0.6, 2.0
ε=1/2 ε=1/2
Increase damping to µ = 2.0
[ movie ]
Note:
• even small perturbations (ε ≈ 0) can lead to instability if µ is small enough
• damping has a stabilizing influence=⇒ the ω = 2 problem is stable if µ ' 0.6
University of Washington – Nov. 2, 2004 16

3. Immersed BoundariesMove on to fluid-structure interaction problems ...
“Life is . . . fiber-reinforced fluid.”
– C. S. Peskin (1999)

3. Immersed BoundariesMove on to fluid-structure interaction problems ...
“Life is . . . fiber-reinforced fluid.”
– C. S. Peskin (1999)
Biological fibers, and surfaces constructed of fibers, immersed in fluid:
• heart and blood vessels
• worms and leeches
• flagellae and cilia
• plant cells (esp. wood)
• microtubules and actin filaments
• suspensions of proteins, DNA, polymers, etc.
University of Washington – Nov. 2, 2004 17

Example: The Heart
Peskin and McQueen (2000): Simulations of the beating heart
Source: http://www.psc.edu/science/Peskin/Peskin.html
[ movie0 ] [ movie1 ] [ movie2 ] [ movie3 ]
University of Washington – Nov. 2, 2004 18

Fiber Architecture of theHeart Muscle Wall
[Dissected pig heart: Carolyn Thomas, 1957]
University of Washington – Nov. 2, 2004 19

The Immersed Boundary Model
Simplifying assumptions:
• 2D fluid with a single, impermeable, elastic membrane (or fiber)
• fiber has zero volume and mass, and is neutrally buoyant
• fluid lies both inside and outside the fiber
• domain is periodic
• in 3D, surfaces are built from an interwoven mesh of fibers

The Immersed Boundary Model
Simplifying assumptions:
• 2D fluid with a single, impermeable, elastic membrane (or fiber)
• fiber has zero volume and mass, and is neutrally buoyant
• fluid lies both inside and outside the fiber
• domain is periodic
• in 3D, surfaces are built from an interwoven mesh of fibers
Ω Γ
Ω = fluid domainp(~x, t) = fluid pressure~u(~x, t) = fluid velocity
Γ = fibers = arclength parameter~X(s, t) = fiber position~U(s, t) = fiber velocity~F (s, t) = fiber force density = σ∂2
s~X (“springs”)
University of Washington – Nov. 2, 2004 20

Dynamic interaction between fluid and fiber:
• the fiber exerts a singular force on adjacent fluid particles:
ρ (∂t~u+ ~u · ∇~u) = µ∆~u−∇p +∫
Γ
~F (s, t) δ(~x− ~X(s, t)) ds
∇ · ~u = 0
(Navier-Stokes equations with a singular force)

Dynamic interaction between fluid and fiber:
• the fiber exerts a singular force on adjacent fluid particles:
ρ (∂t~u+ ~u · ∇~u) = µ∆~u−∇p +∫
Γ
~F (s, t) δ(~x− ~X(s, t)) ds
∇ · ~u = 0
(Navier-Stokes equations with a singular force)
• fiber moves at the fluid velocity – the no slip condition:
∂t ~X = ~u( ~X(s, t), t) =∫
Ω
~u(~x, t) δ(~x− ~X(s, t)) d~x
=⇒ interactions are mediated by delta functions!
An alternate formulation eliminates delta functions in favour ofjump conditions =⇒ immersed interface method [Leveque & Li, 1994]
University of Washington – Nov. 2, 2004 21

Previous Work1. A linear stability analysis for unforced fibers, initially deformed and then
released [JS & Wetton, 1995]:
• unconditionally stable (α > 0)
• dependence of solution on parameters (Re, σo) is non-trivial

Previous Work1. A linear stability analysis for unforced fibers, initially deformed and then
released [JS & Wetton, 1995]:
• unconditionally stable (α > 0)
• dependence of solution on parameters (Re, σo) is non-trivial
2. A nonlinear stability analysis for a passive circular membrane in an inviscidfluid [Cortez & Varela, 1997]

Previous Work1. A linear stability analysis for unforced fibers, initially deformed and then
released [JS & Wetton, 1995]:
• unconditionally stable (α > 0)
• dependence of solution on parameters (Re, σo) is non-trivial
2. A nonlinear stability analysis for a passive circular membrane in an inviscidfluid [Cortez & Varela, 1997]
Question:What happens when a fiber is pulsed periodically
(like a heart muscle fiber)?

Previous Work1. A linear stability analysis for unforced fibers, initially deformed and then
released [JS & Wetton, 1995]:
• unconditionally stable (α > 0)
• dependence of solution on parameters (Re, σo) is non-trivial
2. A nonlinear stability analysis for a passive circular membrane in an inviscidfluid [Cortez & Varela, 1997]
Question:What happens when a fiber is pulsed periodically
(like a heart muscle fiber)?
3. A related problem [Wang, 2003]:
• Floquet-type analysis for buckling instabilities in a headbox, assumingsmall deformations
• flow oscillations drive the structure BUT the structure has no effect onthe fluid
University of Washington – Nov. 2, 2004 22

4. Stability Analysis for Immersed Boundaries
Investigate the stability of a perturbedcircular fiber with periodically-varyingstiffness
σ(t) = σo(1 + 2ε cosωt)(X ,X )r θ
θ
r=1
r

4. Stability Analysis for Immersed Boundaries
Investigate the stability of a perturbedcircular fiber with periodically-varyingstiffness
σ(t) = σo(1 + 2ε cosωt)(X ,X )r θ
θ
r=1
r
Simplifications:
• Assume small perturbations about r = 1
• Linearize the Navier–Stokes equations =⇒ Stokes’ equations
• Convert to stream function & vorticity: u, v −→ ψ, ξ
• Integrate the Navier-Stokes equations across the fiber=⇒ eliminates δ–functions in favour of jump conditions
University of Washington – Nov. 2, 2004 23

The Stream Function–Vorticity FormulationInner (r < 1) and outer (r > 1) solutions both obey:
∆ψ = −ξ
∂tξ =µ
ρ∆ξ
Immersed boundary equation:
∂t ~X = (∂θψ,−∂rψ)|r=1
Jump conditions, with [[·]] .= (·)|r=1+ − (·)|r=1−:
[[ψ]] = 0, [[ξ]] =p2σoiωµ
(ψ(1)− ∂rψ(1))
[[∂rψ]] = 0, [[∂rξ]] =p2(p2 − 1)σo
iωµψ(1)
Boundary conditions:
ψ and ξ bounded as r →∞periodic matching at θ = 0 and 2π
University of Washington – Nov. 2, 2004 24

Floquet–type solutions:
For ξ (and ψ):
ξ(r, θ, t) = eipθ︸︷︷︸periodicin θ
∞∑n=−∞
ξn(r) e(γ+inω)t︸ ︷︷ ︸same as before
For Xr (and Xθ):
Xr(θ, t) = eipθ∞∑
n=−∞Xrn e
(γ+inω)t
Substitute and obtain a Bessel equation for ξn:
z2ξ′′n(z) + zξ′n(z) + (z2 − p2)ξn(z) = 0
where z.= −(Ωn r)2 and Ωn
.=
√ρ(γ + inω)
µ
University of Washington – Nov. 2, 2004 25

Solution: can be written in terms of Bessel functions, Jp and Hp:
ξn(r) =
anHp(iΩnr), if r > 1 (outer)
bnJp(iΩnr), if r < 1 (inner)
and ψn(r) =
combinations of Jp, Hp, r
−p and rp
. . .
Applying jump conditions yields the two equations:
0 = i
µ2
σoΩ
3n
[Hp(iΩn)
Hp−1(iΩn)−
Jp(iΩn)
Jp+1(iΩn)
]+ ip
Xrn
+
µ2
σoΩ
3n
[Hp(iΩn)
Hp−1(iΩn)+
Jp(iΩn)
Jp+1(iΩn)
]− ip
2
Xθn
+ iεp(Xrn−1 −X
rn+1
)− εp
2(Xθn−1 −X
θn+1
)0 = i
µ2
σoΩ
4n
[2−
Hp+1(iΩn)
Hp−1(iΩn)−Jp−1(iΩn)
Jp+1(iΩn)
]+ 2p(p
2 − 1)
Xrn
+µ2
σoΩ
4n
[Hp+1(iΩn)
Hp−1(iΩn)−Jp−1(iΩn)
Jp+1(iΩn)
]Xθn + 2εp(p
2 − 1)(Xrn−1 −X
rn+1
)
View as a linear system in the unknowns[Re(Xr
n), Im(Xrn), Re(X
θn), Im(Xθ
n)]!
University of Washington – Nov. 2, 2004 26

After some messy algebra, obtain another eigenvalue problem
(−D−1E)~c =(
1ε
)~c
where D and E are infinite, real matrices consisting of 4× 4 blocks.
Basic Idea (same as for the Mathieu equation):
• Cut off at finite N
• Look for stability boundaries, γ = 0 and 12iβ
• Parameter space is now the p–ε plane (σo is scaled out)
• Results are reported in terms of the nondimensional parameters
κ =σo
ρω2oR2
and ν =µ
ρωoR2
Question:Are there regions of instability for physically-reasonable
parameter values?
University of Washington – Nov. 2, 2004 27

Stability Diagrams for the Forced Problem
Case I: Case II:κ = 0.04, ν = 0.00056 κ = 0.4, ν = 0.001
p = 4 mode is unstable p = 2 mode is unstable
0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
wave number, p
ampl
itude
, ε
κ = 0.04 ν = 0.00056
HH
H
HH
S
S
S
S
Student Version of MATLAB
0 1 2 3 40
0.5
1
1.5
2
2.5
3
wave number, p
ampl
itude
, ε
κ = 0.4 ν = 0.001 nmax = 40
H
H
H
S
S
S
[ κ ] [ ν ]
University of Washington – Nov. 2, 2004 28

Compile the minimum ε over a range of κ and ν:
10−2
10−1
10−4
10−3
10−2
10−1
0.3
0.5
1
2
5
stiffness, κ
visc
osit
y, ν
Contours of eigenvalues, ε
ε=1/2
Stable
Unstable
A straight–line fit to the ε = 12 stability boundary yields
ν = 0.0389 · κ0.626
(. . . interesting . . . can this be explained?)
Next, compare to both computations and previous analyses . . .
University of Washington – Nov. 2, 2004 29

Natural modes – unforced problem
• consider a fiber with no forcing, ε = 0
• take the n = 0 mode
• the eigenvalue equations reduce to a single dispersion relation
The decay rate and frequency can be compared to direct numerical simulations
10−6
10−4
10−2
0
0.5
1
1.5
2
2.5
3
ν2/κ
Decay rate
−α/
κ1/2
p = 2p = 3p = 4
Student Version of MATLAB
10−6
10−4
10−2
0
1
2
3
4
5
6
ν2/κ
Frequency
β/κ1/
2ω
N(2)
ωN
(3)
ωN
(4) p = 2p = 3p = 4
Student Version of MATLAB
This represents an exact (asymptotic) solution that can be used tovalidate 2D computations!!!
University of Washington – Nov. 2, 2004 30

Natural modes – small ν limit
In the limit as ν → 0, we obtain
Decay rate: α = 0
Frequency: β = ωN√κ where ωN(p) = p
√(p2 − 1)/2.
=⇒ matches the inviscid analysis of [Cortez & Varela, 1997]

Natural modes – small ν limit
In the limit as ν → 0, we obtain
Decay rate: α = 0
Frequency: β = ωN√κ where ωN(p) = p
√(p2 − 1)/2.
=⇒ matches the inviscid analysis of [Cortez & Varela, 1997]
Asymptotic expansion of the dispersion relation in ν yields:
Decay rate: α ∼ − p
2√
2ω
1/2N κ1/4
√ν
Frequency: β ∼ ωN√κ− p
2√
2ω
3/4N κ1/4
√ν
=⇒ matches the viscous analysis of [JS & Wetton, 1995]
University of Washington – Nov. 2, 2004 31

5. Numerical Simulations
“Usual” implementation of the immersed boundary method [Peskin, 1977]
• second order centered differences in space
• split step projection method
• delta function approximation reduces spatial accuracy to first order
• first order and explicit in time
Notice: small discrepancies between analysis and numerics owing to
• artificial dissipation from the numerical scheme
• numerical errors from the first order time–stepping
We have also run fully second-order simulations using the blob projectionmethod [Cortez & Minion, 2000]
University of Washington – Nov. 2, 2004 32

Unforced fiber simulations
Fiber is initially perturbed with a p–mode of magnitude 0.05
Case I: κ = 0.04, ν = 0.00056, p = 4
Initial Amplitude of p = 4 mode
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
x/R
y/R
Student Version of MATLAB
0 50 100 150−0.05
0
0.05
t
Am
plitu
de
Student Version of MATLAB
[ movie ]
University of Washington – Nov. 2, 2004 33

Forced fiber simulations
Fiber is initialized and forced with the same resonant p–mode
Case I: κ = 0.04, ν = 0.00056, p = 4
Amplitude of p = 4 mode Vary parameters
0 50 100 150−0.2
−0.1
0
0.1
0.2
0.3
t
Am
plitu
de
Student Version of MATLAB
0.5 1 1.5 2 2.5 3 3.5 4
x 10−3
0
0.05
0.1
0.15
0.2
0.25
0.3
viscosity, νM
ax. a
mpl
itude
Student Version of MATLAB
[ movie ]0.03 0.04 0.05 0.06 0.07 0.080
0.1
0.2
0.3
0.4
0.5
stiffness, κ
Max
. am
plitu
de
Student Version of MATLAB
University of Washington – Nov. 2, 2004 34

Case II: κ = 0.5, ν = 0.001, p = 2
Amplitude of p = 2 mode Vary Parameters
0 50 100 150 200−0.3
−0.2
−0.1
0
0.1
0.2
0.3
0.4
t
Am
plitu
de
Student Version of MATLAB
2 4 6 8 10 12 14 16
x 10−3
0
0.1
0.2
0.3
0.4
0.5
viscosity, νM
ax. a
mpl
itude
Student Version of MATLAB
[ movie ]0.4 0.45 0.5 0.55 0.6 0.650
0.1
0.2
0.3
0.4
0.5
stiffness, κ
Max
. am
plitu
de
Student Version of MATLABUniversity of Washington – Nov. 2, 2004 35

Energy Transfer from Resonant Modes
Because of numerical errors, the fiber motion is not a pure p–mode
• most of the energy remains in the resonant mode
• Even p: small perturbations appear in all np–modes
• Odd p: asymmetry leads to a small “drift” or p = 1 mode
=⇒ all p-modes are excited! [ sin(p± q) = sin p cos q ± cos p sin q ]
Case I, initialized with p = 3 mode Energy transfers to the resonant p = 4 mode
−1.5 −1 −0.5 0 0.5 1 1.5−1.5
−1
−0.5
0
0.5
1
1.5
x/R
y/R
0 20 40 60 80−0.15
−0.1
−0.05
0
0.05
0.1
t
Am
plitu
de
Amplitude of p−modes
p=3p=4
[ movie ]
University of Washington – Nov. 2, 2004 36

Application to Atrial Fibrillation
Parameter Units Human heart 3D numerics
normal fibrillated (Peskin-McQueen)
ρ g/cm3 1.0 1.0 1.0
µ g/cm s 0.04 0.04 1.0
σo g/cm s2 1000? 1000? 1000?
ωo rad/s (bt/min) 6.3 (60) 18.3 (170) 7.3 (70)
R cm 3.2 3.2 3.2
κ = σoρω2R2 – 2.47 0.29 1.83
ν = µ
ρωR2 – 0.00062 0.00021 0.013
10−2 10−1 100
10−4
10−3
10−2
10−1
Fib
Norm
Num 0.3
0.5
1
2
5
stiffness, κ
visc
osity
, ν
Contours of eigenvalues, ε
ε=1/2
Unstable
Stable
University of Washington – Nov. 2, 2004 37

• Most studies of atrial fibrillation point to electrophysiological causes.
• Our analysis suggests a possible fluid–mechanical contribution to fibrillationthrough feedback into propagation of electrical signals (?)
However, we still don’t expect instabilities to develop in normal hearts!Possible explanations:
• nonlinearities tend to stabilize:
the fiber, introducing a rest length Ro 6= 0 the fluid, moving to higher Reynolds number
• 3D effects are missing:
added stability of an interwoven fiber mesh thickness of the heart wall a heart beat is actually a spiral wave, not a homogeneous pulse
University of Washington – Nov. 2, 2004 38

Application to Cochlear MechanicsThe cochlea is a spiral-wound, fluid-filled tube, which propagates waves alongthe basilar membrane (BM):
Recent research aims to explain the amazing sensitivity of the BM to soundwaves in the presence of large viscous damping:
• (experiments) outer hair cells change length in response to shearing
• modulates the stiffness of the BM
• introduces a mechanical feedback that amplifies BM motions
University of Washington – Nov. 2, 2004 39

Cochlea and basilar membrane
Outer hair cell Organ of Corti
University of Washington – Nov. 2, 2004 40

Parameter Units Cochlea
ρ g/cm3 1.0
µ g/cm s 0.01
σo g/cm s2 1000
ω rad/s 1000+
R cm 0.2
κ = σoρω2R2 – 0.025
ν = µ
ρωR2 – 0.00025 10−2 10−1 100
10−4
10−3
10−2
10−1
Fib
Norm
Num
BM 0.3
0.5
1
25
stiffness, κ
visc
osity
, ν
Contours of eigenvalues, ε
• Current models of cochlear mechanics focus on mechanical resonance[Martin et al., 2000], [Nobili et al., 1998]
• Our analysis suggests that fluid-mechanical feedback may also play asignificant role
• BUT we’re still missing 3D effects, nonlinearities in BM stiffness, andcoupling to mechanical effects
University of Washington – Nov. 2, 2004 41

6. Summary
• performed a Floquet analysis of a parametrically-forced immersed boundary
• derived an analytical (leading-order, asymptotic) solution which can beused to validate 2D numerical simulations – the first such exact solution!
• matched results with previous analyses of the unforced problem in thesmall-viscosity limit
• identified parameter ranges in which forced fiber dynamics are unstable
Warning:(for people simulating active, biological interfaces)
watch out for parametric resonances, which can easilybe mistaken for numerical instabilities!
• suggested possible parametric resonance in biological systems such as thehuman heart and cochlea
University of Washington – Nov. 2, 2004 42

Future Work
• a 3D numerical study of forced immersed boundaries
• spatially-varing stiffness, σ(θ, t) =⇒ simulates spiral wave propagation
• extend to fiber spring force with non-zero resting length, Ro:
~f(s, t) = σ ∂2s~X =⇒ ~f(s, t) = σ ∂s
[∂s ~X
(1−Ro
/∣∣∣∂s ~X∣∣∣)]
• “step–function” forcing
σ
t is better than
σ
t
• optimal control of forced immersed boundaries, with application topacemaker design
=⇒ external forcing f(t) = A cos Ωt, with Ω a control parameter
University of Washington – Nov. 2, 2004 43

References
[1] T. B. Benjamin and F. Ursell. The stability of the plane free surface of a liquid in vertical periodic motion.Proc. Roy. Soc. Lond. A, 225(1163):505–515, 1954.
[2] R. P. Beyer, Jr. A computational model of the cochlea using the immersed boundary method. J. Comput.Phys., 98:145–162, 1992.
[3] M. P. Brenner, D. Lohse, and T. F. Dupont. Bubble shape oscillations and the onset of sonoluminescence.Phys. Rev. Lett., 75:954–957, 1995.
[4] R. Cortez and M. Minion. The blob projection method for immersed boundary problems. J. Comput. Phys.,161(2):428–453, 2000.
[5] R. Cortez and D. A. Varela. The dynamics of an elastic membrane using the impulse method. J. Comput.Phys., 138:224–247, 1997.
[6] S. M. Curry. How children swing. Amer. J. Phys., 44(10):924–926, 1976.
[7] M. Faraday. On a peculiar class of acoustical figures; and on certain forms assumed by groups of particlesupon vibrating elastic surfaces. Phil. Trans. Roy. Soc., 121:299–340, 1831.
[8] G. Floquet. Sur les equations differentielles lineaires a coefficients periodiques. Ann. Sci. Ecole Norm. Sup.,12(2):47–88, 1883.
[9] K. Kumar and L. S. Tuckerman. Parametric instability of the interface between two fluids. J. Fluid Mech.,279:49–68, 1994.
[10] P. Martin, A. D. Mehta, and A. J. Hudspeth. Negative hair-bundle stiffness betrays a mechanism formechanical amplification by the hair cell. Proc. Natl. Acad. Sci. USA, 97(22):12026–12031, 2000.
[11] G. McKay. Onset of double-diffusive convection in a saturated porous layer with time-periodic surfaceheating. Continuum Mech. Thermodyn., 10:241–251, 1998.
[12] D. M. McQueen and C. S. Peskin. A three-dimensional computer model of the human heart for studyingcardiac fluid dynamics. Computer Graphics, 34(1):56–60, 2000.
[13] R. Nobili, F. Mammano, and J. Ashmore. How well do we understand the cochlea? Trends Neurosci.,21:159–167, 1998.
University of Washington – Nov. 2, 2004 44

[14] C. S. Peskin. Numerical analysis of blood flow in the heart. J. Comput. Phys., 25:220–252, 1977.
[15] J. M. Stockie and B. T. R. Wetton. Stability analysis for the immersed fiber problem. SIAM J. Appl.Math., 55(6):1577–1591, 1995.
[16] X. Wang. Instability analysis of some fluid-structure interaction problems. Comput. Fluids, 32:121–138,2003.
University of Washington – Nov. 2, 2004 45