parameter synthesis in dynamical systems by model checking
TRANSCRIPT

Parameter synthesis in dynamical systems bymodel checking
David Safranek
with Nikola Benes, Lubos Brim, Martin Demko, Samuel Pastva
keynote talkSynCoP + PV 2017
Masaryk UniversityCzech Republic
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 1/52

Outline
1 Motivation
2 Parameter Synthesis by Coloured Model Checking
3 Discrete Bifurcation Analysis
4 Case StudiesCase Study using Parameter SynthesisCase Study using Discrete Bifurcation Analysis
5 Discussion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 2/52

Outline
1 Motivation
2 Parameter Synthesis by Coloured Model Checking
3 Discrete Bifurcation Analysis
4 Case StudiesCase Study using Parameter SynthesisCase Study using Discrete Bifurcation Analysis
5 Discussion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 3/52

Motivation: Systems View of Processes Driving the CellTo Mechanistically Understand Natural/Physical Systems
nutrients enzymes
metabolic products
signals
proteins
regulatory elements
METABOLISM PROTEOSYNTHESIS
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 4/52

Motivation: Models of Complex Dynamical SystemsUnderstanding Role of Parameters
deterministic models of dynamical systems:
x = f (x(t), p)
f ... phase space (vector field), f : Rn × Rm → Rn
x ... state vector (Rn)
p ... parameter vector (Rm)
0 0,8 1,6 2,4 3,2 4 4,8 5,6 6,4 7,2 8 8,8 9,6 10,4 11,2 12 12,8 13,6 14,4 15,2 16 16,8 17,6 18,4 19,2
0,8
1,6
2,4
3,2
4
4,8
5,6
6,4
7,2
8
8,8
9,6
10,4
11,2
12
12,8
Insert text here
pRB
E2F1
0 0,8 1,6 2,4 3,2 4 4,8 5,6 6,4 7,2 8 8,8 9,6 10,4 11,2 12 12,8 13,6 14,4 15,2 16 16,8 17,6 18,4 19,2
0,8
1,6
2,4
3,2
4
4,8
5,6
6,4
7,2
8
8,8
9,6
10,4
11,2
12
12,8
Insert text here
pRB
E2F1
p = 0.006 p = 0.012
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 5/52

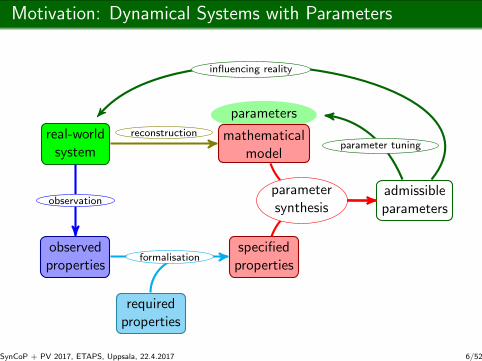
Motivation: Dynamical Systems with Parameters
parameters
real-worldsystem
mathematicalmodel
observedproperties
specifiedproperties
requiredproperties
admissibleparameters
influencing reality
observation
reconstruction
formalisation
parameter tuning
parametersynthesis
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 6/52
Motivation: Dynamical Systems with Parameters
parameters
real-worldsystem
mathematicalmodel
observedproperties
specifiedproperties
requiredproperties
admissibleparameters
influencing reality
observation
reconstruction
formalisation
parameter tuning
parametersynthesis
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 6/52

Model-Based Dynamical Systems AnalysisEmploying Constraints on Systems Dynamics
(bio)physics: often use parameterised non-linear ODEs,supplied with local methods (e.g., simulation)
biology: observations in the form of time-series data
literature provides further constraints on systems dynamics
computer science: turn all known facts into formalspecification and find admissible model parameters
a suitable formal language is provided by temporal logics
if the model is given as a state-transition system we canemploy model checking⇒ exhaustive – global view wrt parameters and initialconditions, different than simulation
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 7/52

Outline
1 Motivation
2 Parameter Synthesis by Coloured Model Checking
3 Discrete Bifurcation Analysis
4 Case StudiesCase Study using Parameter SynthesisCase Study using Discrete Bifurcation Analysis
5 Discussion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 8/52

Problem FormulationParameter Synthesis for Dynamical Systems
parameter constraints
behavior constraints
p |=ΦI ∧M
(p) |=ϕ
parametrised modelM(p)
restrictp
restrictM
ϕ
ΦI
Parameter Synthesis Problem
Assume P is the admissible parameter space. Given a behaviourconstraint ϕ, parameter constraint ΦI , and a parameterisedmodel M, find the maximal set P ⊆ P of parameterisationssuch that p |= ΦI and M(p) |= ϕ for all p ∈ P.
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 9/52

Considered Parameterised Models of Dynamical Systems
a b
c
dynamical systems as regulatory networks
discrete models (e.g., Boolean networks)
parameters determine the logic of interactionsdeterministic (synchronous) vs. non-deterministic(asynchronous)finite-state, finite parameters, parameter explosion dominatesTCCB 2010, CMSB 2012, SASB 2016Henzinger et al. TACAS 2015; Ballarini et al. 2016
non-linear ODE models
continuous parameters determine the vector fieldundecidablesemi-decidable by employing approximations/abstractions
piece-wise affine and piece-wise multi-affineoverapproximation by (parametrised) finite automatastate explosion and parameter explosion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 10/52

Considered Parameterised Models of Dynamical Systems
a b
c
dynamical systems as regulatory networks
discrete models (e.g., Boolean networks)
parameters determine the logic of interactionsdeterministic (synchronous) vs. non-deterministic(asynchronous)finite-state, finite parameters, parameter explosion dominatesTCCB 2010, CMSB 2012, SASB 2016Henzinger et al. TACAS 2015; Ballarini et al. 2016
non-linear ODE models
continuous parameters determine the vector fieldundecidablesemi-decidable by employing approximations/abstractions
piece-wise affine and piece-wise multi-affineoverapproximation by (parametrised) finite automatastate explosion and parameter explosion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 10/52
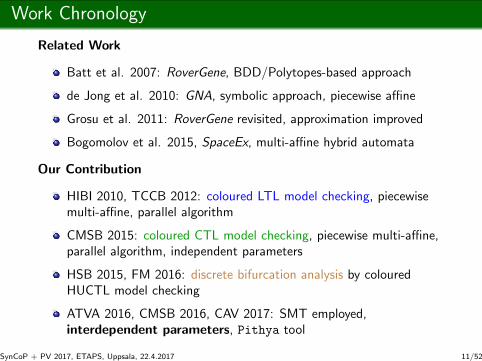
Work Chronology
Related Work
Batt et al. 2007: RoverGene, BDD/Polytopes-based approach
de Jong et al. 2010: GNA, symbolic approach, piecewise affine
Grosu et al. 2011: RoverGene revisited, approximation improved
Bogomolov et al. 2015, SpaceEx, multi-affine hybrid automata
Our Contribution
HIBI 2010, TCCB 2012: coloured LTL model checking, piecewisemulti-affine, parallel algorithm
CMSB 2015: coloured CTL model checking, piecewise multi-affine,parallel algorithm, independent parameters
HSB 2015, FM 2016: discrete bifurcation analysis by colouredHUCTL model checking
ATVA 2016, CMSB 2016, CAV 2017: SMT employed,interdependent parameters, Pithya tool
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 11/52

Workflow
behaviourconstraints
parameterconstraints
ODE model
PWMA model
parameterisedKripke structure
temporal formulae
valid parametervaluations
ColouredModel
Checking
formalisation approximation
abstraction
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 12/52

Step 1: ApproximationDiscretisable Continuous (ODE) Models
(bio)physical mechanisms modeled by sigmoidal kinetics (e.g.,signalling pathways, gene regulatory circuits, ...)optimal approximation of sigmoid functions by piece-wiseaffine functions (ramps) [Grosu et al. CAV 2011]
model abstraction kinetics
piece-wise multi-affinetransient over-approximatedsteady state over-approximated
sigmoidal kineticsmass action
piece-wise affinetransient over-approximatedsteady state exact
first-order sigmoidalkineticsSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 13/52

Step 2: Rectangular Abstraction
approach originates in [Batt, Belta, Habets, van Schuppen 2006]
continuous phase-space is partitioned into (hypher)rectangles
no diagonal transitions, overapproximation
self-transitions, in PWMA only necessary condition for exiting abox in finite time =⇒ overapproximation
A
B
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 14/52

Step 3: Parameter Synthesis – Main IdeaPhase Space Discretisation Leads to Parameter Space Discretisation
dA
dt= −k1 · A + k2 · B
dB
dt= k1 · A− k2 · B
k2 = 0.8
k1 = 0.6
B
A0 2.5 5
2.5
5
(0,0.4) (0.4,0.8) (0.8,1.6) (1.6,max)1
2
3
4
5
−2.5 · k1 > 0
−2.5·k1+2.5·k2 > 0
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 15/52

Step 3: Parameter Synthesis – Main IdeaPhase Space Discretisation Leads to Parameter Space Discretisation
dA
dt= −k1 · A + k2 · B
dB
dt= k1 · A− k2 · B
k2 = 0.8
k1 = 0.6
B
A0 2.5 5
2.5
5
(0,0.4) (0.4,0.8) (0.8,1.6) (1.6,max)1
2
3
4
5
−2.5 · k1 > 0
−2.5·k1+2.5·k2 > 0
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 15/52

Step 3: Parameter Synthesis – Main IdeaPhase Space Discretisation Leads to Parameter Space Discretisation
dA
dt= −k1 · A + k2 · B
dB
dt= k1 · A− k2 · B
k2 = 0.8
k1 = 0.6
B
A0 2.5 5
2.5
5
1
2
3
45
(0,0.4) (0.4,0.8) (0.8,1.6) (1.6,max)1
2
3
4
5
−2.5 · k1 > 0
−2.5·k1+2.5·k2 > 0
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 15/52

Step 3: Parameter Synthesis – Main IdeaPhase Space Discretisation Leads to Parameter Space Discretisation
dA
dt= −k1 · A + k2 · B
dB
dt= k1 · A− k2 · B
k2 = 0.8
k1 = 0.6
B
A0 2.5 5
2.5
5
1
2
3
45
(0,0.4) (0.4,0.8) (0.8,1.6) (1.6,max)1
2
3
4
5
−2.5 · k1 > 0
−2.5·k1+2.5·k2 > 0
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 15/52
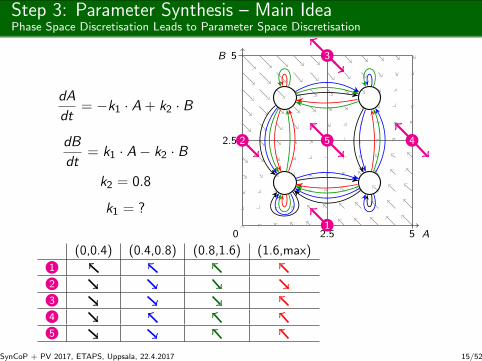
Step 3: Parameter Synthesis – Main IdeaPhase Space Discretisation Leads to Parameter Space Discretisation
dA
dt= −k1 · A + k2 · B
dB
dt= k1 · A− k2 · B
k2 = 0.8
k1 = ?
B
A0 2.5 5
2.5
5
1
2
3
45
(0,0.4) (0.4,0.8) (0.8,1.6) (1.6,max)1
2
3
4
5
−2.5 · k1 > 0
−2.5·k1+2.5·k2 > 0
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 15/52

Step 3: Parameter Synthesis – Main IdeaPhase Space Discretisation Leads to Parameter Space Discretisation
dA
dt= −k1 · A + k2 · B
dB
dt= k1 · A− k2 · B
k2 = 0.8
k1 = ?
B
A0 2.5 5
2.5
5
1
2
3
45
(0,0.4) (0.4,0.8) (0.8,1.6) (1.6,max)1
2
3
4
5
−2.5 · k1 > 0
−2.5·k1+2.5·k2 > 0
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 15/52

Step 3: Parameter Synthesis – Main IdeaPhase Space Discretisation Leads to Parameter Space Discretisation
dA
dt= −k1 · A + k2 · B
dB
dt= k1 · A− k2 · B
k2 = 0.8
k1 = ?
B
A0 2.5 5
2.5
5
1
2
3
45
Φstate00→state10 := −2.5 · k1 > 0 ∨ −2.5 · k1 + 2.5 · k2 > 0
The transition exists if and only if the formula is satisfiable.Local parameter constraints are predicates over reals.
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 15/52

Step 3: Parameter Synthesis – Main IdeaLiveness
necessary condition for escaping a state (rectangle) s in finitetime is
0 /∈ hull{f (v , p) | v ∈ vertices(s)}for all p ∈ P not satisfying the necessary condition above aself-transition is added to s:
Φs,s := ∃c1, . . . , ck :
(k∧
i=1
ci ≥ 0
)∧(
k∑i=1
ci = 1
)∧(
k∑i=1
ci · f (vi , p) = 0
)
quantifier-free formulae giving coarser overapproximation ofself-transitions can be used alternatively
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 16/52

WorkflowParameterised Kripke Structures and Model Checking
behaviourconstraints
parameterconstraints
parameterisedKripke structure
temporal formulae
valid parametervaluations
ColouredModel
Checking
formalisation
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 17/52

Parameterised Kripke StructuresState Transition Systems with Parameters
Transitions with Parameters (coloured transitions)
••
••••
••
••
•••• ••
••
•••
•••
••
••
••••
each parameter valuation represents one Kripke structure
shared state space, different transition space
symbolic representation of parameters
symbolic PKS: every transition is associated with a formula
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 18/52

Parameterised Kripke StructuresState Transition Systems with Parameters
Transitions with Parameters (coloured transitions)
••
••••
••
••
•••• ••••
•••
•••
••
••
••••
each parameter valuation represents one Kripke structure
shared state space, different transition space
symbolic representation of parameters
symbolic PKS: every transition is associated with a formula
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 18/52

Parameter Synthesis by Coloured Model Checking
LT
L o
r (A
)CT
L s
pe
cif
ica
tio
n
the specification is guaranteed(some might be missing)
the specification might be violated
parameter intervals where
[A]
[B]
5
0 2.5 5
2.5
[A][A]
parameterized Kripke structure of the model
CMC
YES NO
parameter intervals where
identify states and colors for which the property does/doesn’t hold
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 19/52

Parameter Synthesis by Coloured Model CheckingSome Observations
exloiting experiences with enumerative MC
many parameter values typically shared on a transition
coloured MC is an effective heuristics wrt naıve approach
parallel automata-based LTL MC [BioDiVinE – TCBB 2010]
LTL nicely preserved by the abstractionsabstractions are non-deterministicneed to analyse decision states (neighbourhood aroundunstable equillibria)we went more to monitoring/robustness analysis STL, STL*(extending work of Donze et al.)
towards coloured CTL model checking [Pithya – CAV 2017]
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 20/52

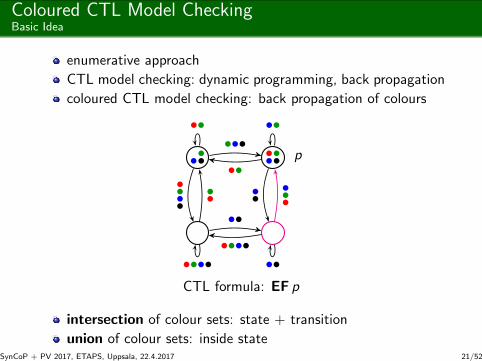
Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
•••• ••
••
••
•••
•••
•••
•••
••
••
••
••••
•••••••
•••••
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52

Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
•••• ••
••
••
•••
•••
•••
•••
••
••
••
••••
•••••••
•••••
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52

Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
•••• ••
••
••
•••
•••
•••
•••
••
••
••
••••
••••
•••
•••••
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52

Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
•••• ••
••
••
•••
•••
•••
•••
••
••
••
••••
••••
•••
•••••
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52

Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
•••• ••
••
••
•••
•••
•••
•••
••
••
••
••••
•••••••
•••••
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52
Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
•••• ••
••
••
•••
•••
•••
•••
••
••
••
••••
•••••••
•••••
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52

Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
•••• ••
••
••
•••
•••
•••
•••
••
••
••
••••
•••••••
•••
••
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52

Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
••••
••
••••
•••
•••
•••
•••
••
••
••
••••
•••••••
•••
••
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52

Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
••••
••
••••
•••
•••
•••
•••
••
••
••
••••
•••••••
••••
•
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52

Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
•••• ••
••
••
•••
•••
•••
•••
••
••
••
••••
•••••••
••••
•
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52

Coloured CTL Model CheckingBasic Idea
enumerative approach
CTL model checking: dynamic programming, back propagation
coloured CTL model checking: back propagation of colours
p
••
••••
••
••
•••• ••
••
••
•••
•••
•••
•••
••
••
••
••••
•••••••
•••••
CTL formula: EF p
intersection of colour sets: state + transition
union of colour sets: inside stateSynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 21/52
Parameter Synthesis by Coloured CTL Model CheckingFormal Definition
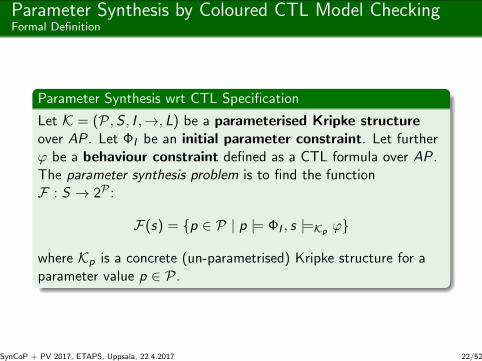
Parameter Synthesis wrt CTL Specification
Let K = (P, S , I ,→, L) be a parameterised Kripke structureover AP. Let ΦI be an initial parameter constraint. Let furtherϕ be a behaviour constraint defined as a CTL formula over AP.The parameter synthesis problem is to find the functionF : S → 2P :
F(s) = {p ∈ P | p |= ΦI , s |=Kp ϕ}
where Kp is a concrete (un-parametrised) Kripke structure for aparameter value p ∈ P.
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 22/52

Symbolic Representation of ParametersUsing SMT to Deal With Parameter Sets
Encoding
every set of parameters (on transitions, inside states)represented by a formula with free variables:satisfying assignments are set elements
union is disjunction, intersection is conjunction
call SMT solver to check whether a formula is satisifiable(i.e. whether the set is nonempty)
call SMT solver to check whether two formulae are equivalent(i.e. whether the set has changed)
optimisation: delay SMT solver calls, cache SMT results
simplification: if parameters are independent we can workdirectly with intervals (symbolic sets) instead of SMT
Expressiveness: anything an SMT solver can handle (we employlinear arithmetics over reals)
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 23/52

Parallelisation of Coloured CTL MCCluster or Multi-Core Based Computing
Kripke Fragments
each worker owns a part of the whole state space
extended with border states
assumption-based approach, three-valued(true/false/unknown)
after everything is computed locally, exchange border stateassumptions
Idea based on:Brim, Yorav, Zıdkova 2005: parallel CTL model checking
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 24/52

Performance and ScalabilityEnzymatic Chain ODE as a Benchmark
S + E ES1 · · · ESk P + ES = 0.1 · ES1 − p1 · E · S
E = 0.1 · ES1 − p2 · E · S + 0.1 · ESk − p2 · E · P˙ES1 = 0.01 · E · S − p3 · ES1 + 0.05 · ES2
...˙ESk = 0.1 · ESk−1 − pk · ESk + 0.01 · E · PP = 0.1 · ESk − pk+1 · E · P − 0.1 · PList1
Stránka 1
2 3 4 5 6 7 8 9 10 11 12
0
1000
2000
3000
4000
5000
6000
7000
Scalabilityall for 6 dimensions per 13 thresholds
1 param2 param3 param4 param5 param6 param
Nodes
time
(s
)
quad-core 2GHz Intel Xeon CPUs, 1 core used per node, without SMT
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 25/52
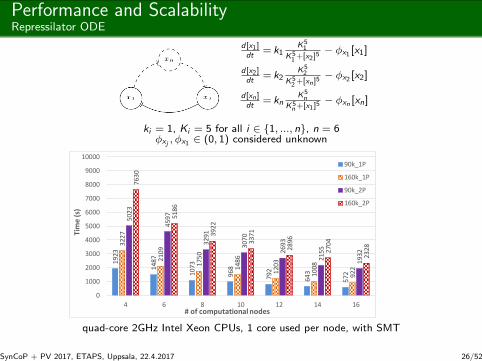
Performance and ScalabilityRepressilator ODE
d [x1]dt
= k1K5
1
K51 +[x2]5
− φx1 [x1]
d [x2]dt
= k2K5
2
K52 +[xn ]5
− φx2 [x2]
d [xn ]dt
= knK5n
K5n +[x1]5
− φxn [xn]
ki = 1, Ki = 5 for all i ∈ {1, ..., n}, n = 6φxj , φx1 ∈ (0, 1) considered unknown
1923
1487
1073
968
792
643
572
3227
2109
1750
1486
1203
1008
922
5023
4597
3291
3070
2693
2155
1932
7630
5186
3922
3371
2896
2704
2328
0
1000
2000
3000
4000
5000
6000
7000
8000
9000
10000
4 6 8 10 12 14 16
Tim
e (
s)
# of computational nodes
90k_1P
160k_1P
90k_2P
160k_2P
quad-core 2GHz Intel Xeon CPUs, 1 core used per node, with SMT
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 26/52

Outline
1 Motivation
2 Parameter Synthesis by Coloured Model Checking
3 Discrete Bifurcation Analysis
4 Case StudiesCase Study using Parameter SynthesisCase Study using Discrete Bifurcation Analysis
5 Discussion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 27/52
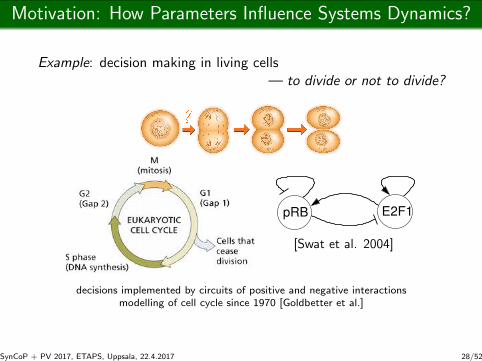
Motivation: How Parameters Influence Systems Dynamics?
Example: decision making in living cells— to divide or not to divide?
E2F1pRB
[Swat et al. 2004]
decisions implemented by circuits of positive and negative interactionsmodelling of cell cycle since 1970 [Goldbetter et al.]
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 28/52

Motivation: How Parameters Influence Systems Dynamics?Bifurcation Analysis of Dynamical Systems
typical phase portraits around equilibria:
bifurcation is defined as a topological change in phase space
small change in parameter =⇒ qualitative change in dynamicsthe goal of bifurcation analysis is to identify bifurcation points
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 29/52

Motivation: How Parameters Influence Systems Dynamics?Bifurcation Analysis in Systems Theory
cannot divide can decide for division must divide
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 30/52

Motivation: How Parameters Influence Systems Dynamics?Bifurcation Analysis in Systems Theory
cannot divide can decide for division must divide
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 30/52

Motivation: Models of Complex Dynamical SystemsUnderstanding Role of Parameters
in the vector field the equilbria have certain patterns
the patterns change with parameters (appear, disappear,change shape)
0 0,8 1,6 2,4 3,2 4 4,8 5,6 6,4 7,2 8 8,8 9,6 10,4 11,2 12 12,8 13,6 14,4 15,2 16 16,8 17,6 18,4 19,2
0,8
1,6
2,4
3,2
4
4,8
5,6
6,4
7,2
8
8,8
9,6
10,4
11,2
12
12,8
Insert text here
pRB
E2F1
0 0,8 1,6 2,4 3,2 4 4,8 5,6 6,4 7,2 8 8,8 9,6 10,4 11,2 12 12,8 13,6 14,4 15,2 16 16,8 17,6 18,4 19,2
0,8
1,6
2,4
3,2
4
4,8
5,6
6,4
7,2
8
8,8
9,6
10,4
11,2
12
12,8
Insert text here
pRB
E2F1
p = 0.006 p = 0.012
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 31/52

Phase Portrait SpecificationElementary Patterns
Single-state patterns
*
saddle
*
sink source flow
Multi-state patterns
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 32/52
Phase Portrait Specification
elementary patterns describe temporal behaviour in states
(in)stability, stabilisation, flow direction, ...in non-deterministic system: possibility or inevitability
employ temporal logics to formalise the patterns
need to express branching over labeled transitions, future andpast, state variables
stability (sink)there is a state with no outgoing transition (only a self-loop)instability (source)there is a state with no incoming transition (only a self-loop)increasing flowonly transitions in particular direction
some work done – UCTL [ter Beek et al.], hybrid logics[Arellano et al. 2011], ...
to combine all of these we introduce HUCTLP
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 33/52

Phase Portrait Specification: HUCTLP
HUCTLP — hybrid UCTL with past
in addition to AP there are direction formulae:
χ ::= true | d | ¬χ | χ ∧ χ where d ∈ Dir
state formulae
ϕ ::= true | p | ¬ϕ | ϕ ∧ ϕ | Eψ | Aψ |Eψ | Aψ | x | ↓ x .ϕ | @x .ϕ | ∃x .ϕ
path formulae
ψ ::= Xχ ϕ | ϕ χUϕ | ϕ χUχ ϕ | ϕ χWϕ | ϕ χWχ ϕ
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 34/52

Phase Portrait Specification: HUCTLP
Single-state patterns
sink (stable steady state): ↓ s.AX s
source (only self-loops, no other incoming): ↓ s. AX s
2d-saddle (nort-south outgoing, west-east incoming):AXN∨S true ∧ EXN true ∧ EXS true∧AXE∨W true ∧ EXE true ∧ EXW true
Multi-state patterns
state in a nontrivial SCC: ↓ s.EX EF s
state in a final SCC (generalised sink): ↓ s.AG EF s
Relations among patterns
at least two sinks in the whole system:∃s.∃t.(@s.¬t ∧ AX s) ∧ (@t.AX t)
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 35/52

Phase Portrait SpecificationFrom Phase Portrait Specification to Parametric Phase Portrait
phase portrait specification φ = {ϕ1, ϕ2}phase portrait pattern Xφ = {ϕ1 ∧ ϕ2, ϕ1 ∧ ¬ϕ2,¬ϕ1 ∧ ϕ2,¬ϕ1 ∧ ¬ϕ2}
subpatterns, e.g., X ′ = {¬ϕ1 ∧ ϕ2,¬ϕ1 ∧ ¬ϕ2} ⊂ Xφ
ϕ1 ∧ ¬ϕ2
ϕ1 ∧ ϕ2
¬ϕ1 ∧ ϕ2
¬ϕ1 ∧ ¬ϕ2
ϕ2
¬ϕ2
Parametric Phase Portrait
parameter space PP(ϕ) ⊆ P all parameters for which there is a state satisfying ϕ
stratum: ΓXφ =⋂ϕ∈Xφ P(ϕ), ΓX ′ =
⋂ϕ∈X ′ P(ϕ), . . .
p ∈ P is a bifurcation point if it is a boundary point of some stratum
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 36/52

Phase Portrait SpecificationFrom Phase Portrait Specification to Parametric Phase Portrait
phase portrait specification φ = {ϕ1, ϕ2}phase portrait pattern Xφ = {ϕ1 ∧ ϕ2, ϕ1 ∧ ¬ϕ2,¬ϕ1 ∧ ϕ2,¬ϕ1 ∧ ¬ϕ2}
subpatterns, e.g., X ′ = {¬ϕ1 ∧ ϕ2,¬ϕ1 ∧ ¬ϕ2} ⊂ Xφ
ϕ1 ∧ ¬ϕ2
ϕ1 ∧ ϕ2
¬ϕ1 ∧ ϕ2
¬ϕ1 ∧ ¬ϕ2
ϕ2
¬ϕ2
Parametric Phase Portrait
parameter space PP(ϕ) ⊆ P all parameters for which there is a state satisfying ϕ
stratum: ΓXφ =⋂ϕ∈Xφ P(ϕ), ΓX ′ =
⋂ϕ∈X ′ P(ϕ), . . .
p ∈ P is a bifurcation point if it is a boundary point of some stratum
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 36/52

Discrete Bifurcation Analysis Problem
Problem Definition
Assume P is a finite partially ordered domain representing them-dimensional parameter space. Given a parameterised modelM and a phase portrait specification φ, compute the parametricportrait of M wrt φ and identify all bifurcation points in P wrtM and φ.
Parametrised Model M
Phase Portrait Specification φ
ColouredModel
Checking
Parametric Portrait Bifurcation Points
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 37/52

Outline
1 Motivation
2 Parameter Synthesis by Coloured Model Checking
3 Discrete Bifurcation Analysis
4 Case StudiesCase Study using Parameter SynthesisCase Study using Discrete Bifurcation Analysis
5 Discussion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 38/52

Outline
1 Motivation
2 Parameter Synthesis by Coloured Model Checking
3 Discrete Bifurcation Analysis
4 Case StudiesCase Study using Parameter SynthesisCase Study using Discrete Bifurcation Analysis
5 Discussion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 39/52

Case study: Biodegradation of Trichloropropane in E. coli
TCP DCP ECH CPD GDL GLYDhaA HheC EchA HheC EchA
d [TCP]dt
=− k1·DhaA·[TCP]Km,1+[TCP]
d [DCP]dt
= k1·DhaA··[TCP]Km,1+[TCP]
− k2·HheC ·[DCP]Km,2+[DCP]
d [ECH]dt
= k2·HheC ·[DCP]Km,2+[DCP]
− k3·EchA·[ECH]Km,3+[ECH]
d [CPD]dt
= k3·EchA·[ECH]Km,3+[ECH]
− k4·HheC ·[CPD]Km,4+[CPD]
d [GDL]dt
= k4·HheC ·[CPD]Km,4+[CPD]
− k5·HheC ·[GDL]Km,5+[GDL]
d [GLY ]dt
= k5·HheC ·[GDL]Km,5+[GDL]
biodegradation of toxic substrate and intermediates
synthetic pathway utilising enzymes from two other bacteriaRhodococcus rhodochrous NCIMB 13064; Agrobacterium radiobacter AD1
find optimal enzymes concentration balancing metabolicburden and toxicity
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 40/52

Case study: Biodegradation of Trichloropropane in E. coli
Desired behaviour:
“TCP is finally completely degraded and the concentration of intermediates does notexceed given bounds”
Formally:
ϕ1 = (A([TCP] > x)U(AF(AG [TCP] < y))),
ϕ2 = (A([GLY ] < y)U(AF(AG [GLY ] > x))),
ϕ3 = (AG [DCP] < v) ∧ (AG [GDL] < w),
ϕ = (ϕ1 ∧ ϕ2 ∧ ϕ3),
where x , y , v and w are estimated values making an instance of this property:
x = 1.9 (according to authors1 using the value 2 mM),
y = 0.01 (obviously, cannot be zero),
v ∈ {0.5, 0.3, 0.1} (variations based on experimental data observation)
w ∈ {0.5, 0.25, 0.1} (variations based on experimental data observation)
1Kurumbang et al., ACS Synthetic Biology, 2013SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 41/52

Case study: Biodegradation of Trichloropropane in E. coli
DhaA
HheC
EchA
DhaA
Hh
eC
DhaA
Ech
A
HheC
Ech
A
A sample of the resulting parameter space for a particular initial state:TCP ∈ [1.9, 1.9586], DCP ∈ [0.448898, 0.5], GDL ∈ [0.0, 0.0669138], GLY ∈ [0.0, 0.01]
Dotted area corresponds to ϕ (v = 0.5, w = 0.25).SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 42/52
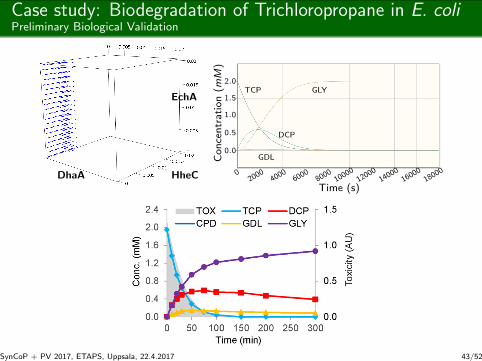
Case study: Biodegradation of Trichloropropane in E. coliPreliminary Biological Validation
DhaA HheC
EchA
Time (s)
Co
nce
ntr
ati
on
(mM
)
2.0
1.5
1.0
0.5
0.0
02000
40006000
800010000
1200014000
1600018000
TCP GLY
DCP
GDL
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 43/52

Outline
1 Motivation
2 Parameter Synthesis by Coloured Model Checking
3 Discrete Bifurcation Analysis
4 Case StudiesCase Study using Parameter SynthesisCase Study using Discrete Bifurcation Analysis
5 Discussion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 44/52

Case Study: Regulation of G1/S Cell Cycle Transition
E2F1pRB
[Swat et al. 2004]
d [pRB]dt
= k1[E2F1]
Km1+[E2F1]J11
J11+[pRB]− φpRB [pRB]
d [E2F1]dt
= kp + k2a2+[E2F1]2
K2m2+[E2F1]2
J12J12+[pRB]
− φE2F1[E2F1]
bifurcation analysis wrt φpRB
Analysed phase portrait pattern:
• ϕ1 := ∃s.∃t.(@s.AG EF s)∧ (@t.¬EF s ∧AG EF t)∧E¬NF s ∧E¬SF t
• ϕ2 := ¬ϕ1 ∧ ↓ s.AG EF s ∧ E2F1 < 4
• ϕ3 := ¬ϕ1 ∧ ↓ s.AG EF s ∧ E2F1 > 4SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 45/52

Case Study: ResultsE
2F
1
pRB
ϕ2 ϕ1 ϕ3
φpRB = 0.0075 φpRB = 0.0115 φpRB = 0.014[0.002, 0.011] [0.011, 0.0136] [0.0136, 0.5]
bifurcation points: {0.011, 0.0136}
results agree with numerical methods up-to precision ofapproximation/discretisation
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 46/52

Outline
1 Motivation
2 Parameter Synthesis by Coloured Model Checking
3 Discrete Bifurcation Analysis
4 Case StudiesCase Study using Parameter SynthesisCase Study using Discrete Bifurcation Analysis
5 Discussion
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 47/52

Summary and Conclusions
exploiting dynamical systems under parameter uncertainty byenumerative model checking with symbolic representation ofparameters
good scalability achieved for interval-based representation ofparameters
scalability of SMT-based version depends on model structure
remaining challenges:
approximation: explore errors, what can be guaranteed?abstraction: narrow the extent of overapproximation – canDarboux polynomials or barrier certificates help?improve scalabilityis it possible to combine model checking with simulation?[TCSB XIV, 2012]
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 48/52

Discussion
relations to parametric model checking
action synthesis [Knapik et al. 2014]entirely symbolic approachesin our case action parameters depend on states
bifurcation of programs/protocols
a form of robustness analysis
abstract interpretation wrt parameters
parameter space compaction
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 49/52

Check Out Pithya
https://github.com/sybila/pithya-gui
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 50/52

Digital Systems Biology Laboratory
http://sybila.fi.muni.cz
since 2009
originated in model checking communityinvolved in systems biology since 2007 (EC-MOAN FP6)
parallel model checking algorithms development
adapting formal methods to applications in systems biologyformal specification and modelling of biological systemsparameter synthesis and bifurcation analysis
contributions to systems biology and bioinformaticsintegration of formal methods with bionformatics andexperimental biologycase studies with biological groups
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 51/52

Credits
Computer Science
Lubos Brim, Marta Kwiatkowska, Thomas Henzinger,Loıc Pauleve, Ezio Bartocci, Luca Bortolussi, Jerome Feret,Andrzej Mizera, Alessandro Abate, Jan Van Schuppen, MilanCeska, Nikola Benes, Stefan Haar, Heike Siebert, Hidde de Jong
Biology
Ralf Steuer, Louis Mahadevan, Jan Cerveny, Dusan Lazar, PavelKrejcı, Stefanie Hertel, Christoff Flamm
Funding
Grant Agency of Czech Republic
C4SYS – National Infrastructure for Systems Biology
SynCoP + PV 2017, ETAPS, Uppsala, 22.4.2017 52/52