memoria p. aravena final
DESCRIPTION
MemoriaTRANSCRIPT
UNIVERSIDAD DE CONCEPCIÓN FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA
Profesor Patrocinante:
Dr. Luis A. Morán T.
Informe de Memoria de Título para optar al título de:
Ingeniero Civil Eléctrico
Compensación de Corrientes Armónicas y Potencia Reactiva en Cicloconversores Utilizando Filtro
Híbrido Concepción, Mayo de 2013 Pablo Andrés Aravena Araneda

UNIVERSIDAD DE CONCEPCIÓN Profesor Patrocinante: Facultad de Ingeniería Dr. Luis A. Morán T. Departamento de Ingeniería Eléctrica
Compensación de Corrientes Armónicas y Potencia Reactiva en Cicloconversores
Utilizando Filtro Híbrido
Pablo Andrés Aravena Araneda
Informe de Memoria de Título para optar al Título de
Ingeniero Civil Eléctrico
Mayo 2013

iii
Resumen
En este trabajo se presentan las características de entrada del cicloconversor en aplicaciones de
molienda que definen las condiciones de compensación. Se analizan las topologías de filtros pasivos
para la compensación de potencia reactiva y corrientes armónicas, a la vez que se indican los efectos
de las variables de diseño en la atenuación armónica, pérdidas y costo en términos cualitativos. Esto
permite diseñar un esquema de compensación pasivo para una aplicación de molienda real,
verificándose las distorsiones armónicas con respecto a límites normativos. Se propone una
topología de filtro híbrido con base en el potencial de compensación de la planta de molienda
analizada. Con esta topología se busca la reducción de componentes armónicas no características
que no son atenuadas por el esquema pasivo. Se indica además las limitantes en la generación de
referencia para estas componentes.
Los resultados obtenidos muestran que se puede lograr una efectiva compensación de una
planta de molienda a través de filtros pasivos siguiendo las recomendaciones de diseño propuestas
para dar cumplimiento al IEEE Std. 519-1992. La distorsión interarmónica que no es restringida, se
puede atenuar con la topología híbrida cuya etapa activa presenta una reducida especificación de
potencia activa.

iv
A mi madre.

v
Agradecimientos
Son muchas las personas que me prestaron su apoyo para el desarrollo de este trabajo de
título. En primer lugar quisiera agradecer el apoyo del profesor patrocinante Dr. Luis Morán T.
quien con sus comentarios y observaciones permitieron dar un sentido más aplicado al trabajo.
También agradezco a mis amigos de universidad con los que viví momentos de estudio cuyo estrés
se diluía cuando se planificaba que hacer en el tiempo libre. A mis compañeros del Laboratorio de
Calidad de Suministro Eléctrico por mantener ese ecosistema con base en el trabajo y la
camaradería. Finalmente, siempre agradeceré a mi familia por su confianza y apoyo incondicional.
vi
Tabla de Contenidos
LISTA DE TABLAS .................................................................................................................................................... VIII
LISTA DE FIGURAS ..................................................................................................................................................... IX
CAPÍTULO 1. INTRODUCCIÓN ................................................................................................................................. 1
1.1. INTRODUCCIÓN GENERAL .................................................................................................................................... 1 1.2. TRABAJOS PREVIOS ............................................................................................................................................. 2
1.2.1 Normativas .................................................................................................................................................. 2 1.2.2 Respecto a cicloconversores ....................................................................................................................... 2 1.2.3 Respecto a filtros pasivos ........................................................................................................................... 4 1.2.4 Respecto a filtros híbridos .......................................................................................................................... 6
1.3. HIPÓTESIS DE TRABAJO ....................................................................................................................................... 8 1.4. OBJETIVOS ........................................................................................................................................................... 8
1.4.1 Objetivo General ........................................................................................................................................ 8 1.4.2 Objetivos Específicos .................................................................................................................................. 8
1.5. ALCANCES Y LIMITACIONES ................................................................................................................................ 9 1.6. TEMARIO .............................................................................................................................................................. 9
CAPÍTULO 2. CARACTERÍSTICAS DEL CICLOCONVERSOR ........................................................................ 10
2.1. INTRODUCCIÓN .................................................................................................................................................. 10 2.2. PRINCIPIO DE OPERACIÓN ................................................................................................................................... 10
2.2.1 Modo con corriente circulante ................................................................................................................. 12 2.2.2 Modo sin corriente circulante ................................................................................................................... 13 2.2.3 Inyección de tercera armónica ................................................................................................................. 15
2.3. TOPOLOGÍAS ...................................................................................................................................................... 16 2.4. FACTOR DE DESPLAZAMIENTO DE ENTRADA ...................................................................................................... 18 2.5. CARACTERÍSTICA DE POTENCIA DE ENTRADA .................................................................................................... 21 2.6. DISTORSIÓN ARMÓNICA DE LA CORRIENTE DE ENTRADA ................................................................................... 23 2.7. DISCUSIÓN Y CONCLUSIONES ............................................................................................................................ 26
CAPÍTULO 3. FILTROS PASIVOS PARA COMPENSACIÓN DE POTENCIA REACTIVA Y CORRIENTES ARMÓNICAS ...................................................................................................................................... 27
3.1. INTRODUCCIÓN .................................................................................................................................................. 27 3.2. FILTRO PASA-BANDA ......................................................................................................................................... 27 3.3. FILTRO PASA-ALTOS .......................................................................................................................................... 29 3.4. FILTRO TIPO C .................................................................................................................................................... 32 3.5. PÉRDIDAS EN FILTROS PASIVOS .......................................................................................................................... 34 3.6. ATENUACIÓN ARMÓNICA ................................................................................................................................... 38 3.7. DISTRIBUCIÓN DE POTENCIA REACTIVA ............................................................................................................. 42 3.8. COSTOS .............................................................................................................................................................. 42 3.9. RECOMENDACIONES DE DISEÑO ......................................................................................................................... 43 3.10. EJEMPLO DE APLICACIÓN ................................................................................................................................... 45 3.11. DISCUSIÓN Y CONCLUSIONES ............................................................................................................................ 50
CAPÍTULO 4. FILTRO HÍBRIDO PARALELO ...................................................................................................... 52
4.1. INTRODUCCIÓN .................................................................................................................................................. 52 4.2. PRINCIPIO DE OPERACIÓN .................................................................................................................................. 52
4.2.1 Compensación de potencia reactiva ......................................................................................................... 53 4.2.2 Compensación de corrientes armónicas ................................................................................................... 55
4.3. INFLUENCIA DEL FILTRO PASIVO EN EL ETAPA ACTIVA ..................................................................................... 58 4.3.1 Potencia reactiva del filtro pasivo ............................................................................................................ 58 4.3.2 Frecuencia de sintonización ..................................................................................................................... 60
4.4. POTENCIAL DE COMPENSACIÓN ......................................................................................................................... 61 4.5. TOPOLOGÍA PROPUESTA .................................................................................................................................... 62
vii
4.6. LIMITANTES EN GENERACIÓN DE REFERENCIA .................................................................................................. 65 4.7. DISCUSIÓN Y CONCLUSIONES ............................................................................................................................ 70
CAPÍTULO 5. CONCLUSIONES ............................................................................................................................... 71
5.1. SUMARIO ........................................................................................................................................................... 71 5.2. COMENTARIOS ................................................................................................................................................... 72 5.3. CONCLUSIONES .................................................................................................................................................. 73 5.4. TRABAJO FUTURO .............................................................................................................................................. 75
BIBLIOGRAFÍA .............................................................................................................................................................. 77
ANEXO A. EXPRESIONES DE POTENCIA DE FILTRO HÍBRIDO ............................................................. 81
A.1. COMPENSACIÓN ARMÓNICA POR CONTROL VAH=KISH ......................................................................................... 82 A.2. COMPENSACIÓN ARMÓNICA POR CONTROL VAH=- VFH ........................................................................................ 84 A.3. TRABAJOS DE INVESTIGACIÓN ........................................................................................................................... 84

viii
Lista de Tablas Tabla 3.1 Efecto de la Modificación de Variables de Diseño en Filtros Pasivos. ............................. 44 Tabla 3.2 Características de Filtros Pasivos en Planta de Molienda. ................................................. 46 Tabla 3.3 Pérdidas de Filtros Pasivos en Planta de Molienda. ........................................................... 47 Tabla 3.4 Comparación de atenuación armónica con límites de IEEE Std. 519-1992. ..................... 49 Tabla 4.1 Distorsiones armónicas de la corriente del sistema de planta industrial Fig. 3.17. ............ 61 Tabla 4.2 Componentes interarmónicas de mayor amplitud. ............................................................. 62 Tabla 4.3 Distorsiones armónicas de la corriente del sistema sin componentes interarmónicas de
mayor amplitud. ................................................................................................................. 62
ix
Lista de Figuras Fig. 2.1 Topología de cicloconversor basado en puentes de Graetz. ................................................. 10 Fig. 2.2 Generación de voltaje de salida del cicloconversor a partir de voltajes de entrada. ............. 11 Fig. 2.3 Control de modo con corriente circulante. ............................................................................ 12 Fig. 2.4 Control de modo sin corriente circulante. ............................................................................. 13 Fig. 2.5 Forma de onda de tensión con control en modo sin corriente circulante. ............................. 14 Fig. 2.6 Forma de onda de corriente con control en modo sin corriente circulante. .......................... 14 Fig. 2.7 Señal de referencia para un índice de modulación 1.1. ......................................................... 15 Fig. 2.8 Cicloconversor trifásico de 6 pulsos. .................................................................................... 16 Fig. 2.9 Cicloconversor trifásico de 12 pulsos. .................................................................................. 16 Fig. 2.10 Cicloconversor trifásico de 12 pulsos con convertidores en conexión serie. ..................... 17 Fig. 2.11 Cicloconversor trifásico de 12 pulsos para máquina con doble bobinado de estator. ........ 18 Fig. 2.12 Factor de desplazamiento de entrada versus factor de desplazamiento salida con distintos
índices de modulación. ......................................................................................................... 20 Fig. 2.13 Factor de desplazamiento de entrada versus índice de modulación sin flujo de potencia
reactiva en la carga. .............................................................................................................. 21 Fig. 2.14 Curva de operación de potencia activa en por unidad. ....................................................... 22 Fig. 2.15 Curva de operación de potencia reactiva en por unidad. .................................................... 22 Fig. 2.16 Forma de onda de la corriente de entrada del cicloconversor de 12 pulsos. ....................... 24 Fig. 2.17 Espectro armónico de la corriente de entrada del cicloconversor de 12 pulsos. ................. 24 Fig. 2.18 Contenido armónico característico de la corriente de entrada del cicloconversor de 12
pulsos. .................................................................................................................................. 25 Fig. 2.19 Contenido no característico de la corriente de entrada del cicloconversor de 12 pulsos. ... 25 Fig. 2.20 Distorsiones de corriente en la corriente de entrada del cicloconversor de 12 pulsos. ....... 26 Fig. 3.1 Modelo monofásico del filtro pasa-banda ............................................................................. 28 Fig. 3.2 Filtro pasa-banda para diferentes factores de calidad en reactor. ......................................... 29 Fig. 3.3 Modelo monofásico del filtro pasa-altos ............................................................................... 30 Fig. 3.4 Filtro pasa-altos para diferentes constantes de diseño. ......................................................... 31 Fig. 3.5 Modelo monofásico del filtro tipo C ..................................................................................... 32 Fig. 3.6 Filtro tipo C para diferentes constantes de diseño. ............................................................... 33 Fig. 3.7 Resistencia a frecuencia fundamental versus constante de diseño en filtro tipo C. .............. 35 Fig. 3.8 Resistencia a frecuencia fundamental en filtro tipo C versus factor de calidad. .................. 35 Fig. 3.9 Resistencia a frecuencia fundamental en filtro tipo C versus frecuencia de sintonización. . 36 Fig. 3.10 Resistencia a frecuencia fundamental versus potencia reactiva. ........................................ 37 Fig. 3.11 Pérdidas a frecuencia fundamental versus potencia reactiva. ............................................. 37 Fig. 3.12 Modelo monofásico equivalente para inyección de corrientes armónicas al sistema. ........ 38 Fig. 3.13 Impedancia del sistema y filtro pasa-altos con factor de atenuación resultante. ................ 39 Fig. 3.14 Factor de atenuación de filtro tipo C para diferentes constantes de diseño. ....................... 40 Fig. 3.15 Factor de atenuación de filtro tipo C para diferentes niveles de potencia reactiva. ............ 40 Fig. 3.16 Factor de atenuación de filtro tipo C para diferentes factores de calidad en reactor. ......... 41 Fig. 3.17 Factor de atenuación de filtro tipo C para diferentes frecuencias de sintonización. ........... 41 Fig. 3.18 Diagrama unilineal de planta de molienda. ......................................................................... 45 Fig. 3.19 Espectro armónico de la corriente de línea en planta de molienda referida a 23 kV. ......... 46 Fig. 3.20 Impedancia del sistema y equivalente de los tres grupos de filtros pasivos. ...................... 47 Fig. 3.21 Factor de atenuación de los filtros pasivos. ........................................................................ 48 Fig. 3.22 Espectro armónico de la corriente de línea del sistema referida a 23 kV. .......................... 48

x
Fig. 3.23 Factor de atenuación de los filtros pasivos entre 60 y 100 Hz. ........................................... 50 Fig. 4.1 Topología de filtro híbrido paralelo. ..................................................................................... 52 Fig. 4.2 Modelo monofásico equivalente para compensación de potencia reactiva de filtro híbrido. 53 Fig. 4.3 Potencia reactiva equivalente del filtro pasivo, filtro activo y total versus β. ...................... 55 Fig. 4.4 Modelo monofásico equivalente para compensación de armónicos con filtro híbrido. ....... 56 Fig. 4.5 Factor de atenuación de filtro híbrido con sistema y filtro pasivo de Fig. 3.12. ................... 57 Fig. 4.6 Impedancia versus frecuencia para distintos valores de potencia reactiva. .......................... 60 Fig. 4.7 Topología propuesta de filtro híbrido con filtros pasivos. .................................................... 63 Fig. 4.8 Impedancia equivalente de la etapa pasiva del filtro híbrido propuesto. .............................. 64 Fig. 4.9 Topología propuesta de filtro híbrido con filtros pasivos. .................................................... 64 Fig. 4.10 Método de generación de referencia a través de transformada abc / dq0. .......................... 66 Fig. 4.11 Respuesta en frecuencia de filtros pasa-bajos Butterworth y Elíptico. ............................... 67 Fig. 4.12 Respuesta en frecuencia de filtros pasa-bajos Chebyshev-1 y Chebyshev-2. .................... 67 Fig. 4.13 Respuesta en frecuencia de filtros pasa-bajos Butterworth de 1er a 4to orden. .................... 68 Fig. 4.14 Respuesta a entrada escalón de filtros pasa-bajos Butterworth de 2 ° orden. ..................... 68 Fig. 4.15 Tiempo de asentamiento de filtros pasa-bajos Butterworth de 1er a 4to orden. ................... 69 Fig. A.1 Topología de filtro híbrido paralelo con transformadores de acoplamiento. ....................... 81 Fig. A.2 Modelo monofásico equivalente para compensación de potencia reactiva de filtro híbrido 81 Fig. A.3 Modelo monofásico equivalente para compensación de armónicos con filtro híbrido. ....... 82
1
Capítulo 1. Introducción
1.1. Introducción General
La minería en Chile ha tenido un creciente desarrollo debido principalmente al aumento de la
demanda del cobre con precios que se han mantenido en niveles elevados. Esta situación ha
favorecido que las plantas actuales puedan planificar y ejecutar ampliaciones para responder a la
mayor demanda. Inclusive nuevos proyectos mineros se han desarrollado para la explotación de
yacimientos de baja ley que hasta hace algunos años no presentaban una rentabilidad atractiva para
las inversiones.
La gran envergadura que han alcanzado las plantas mineras las hacen extensivas en el uso de
la energía, siendo la eléctrica la de mayor demanda observada. La normativa indica que el sistema
interconectado debe permanecer estable frente a los impactos o deslastres de carga que son
realizados por una planta o cliente. Por otra parte, la operación normal de la planta debe asegurar
flujos de potencia reactiva acotados por los límites de factor de potencia establecidos en la
normativa. Estos límites están relacionados con el nivel de voltaje y son continuamente evaluados en
intervalos integrados de tiempo en el punto de conexión del cliente con el sistema eléctrico, lo que
se denomina punto de común acoplamiento.
La mayor eficiencia requerida en las cargas de gran potencia hace que se incorpore la
electrónica de potencia. Desde el punto de vista eléctrico, estas cargas son altamente eficientes, pero
pueden presentar importantes flujos de potencia reactiva junto con generar contaminación armónica
debido a su naturaleza no lineal. El cicloconversor forma parte de este tipo de cargas y se caracteriza
por transformar la tensión de la red de magnitud y frecuencia constantes en magnitud y frecuencia
variables en sus terminales de salida. Esto junto con otras características le ha valido al
cicloconversor ser ampliamente utilizado en procesos de molienda.
Tradicionalmente la potencia reactiva y las corrientes armónicas son compensadas por filtros
pasivos. El diseño de los componentes está ligado a requerimientos técnicos y en gran medida a las
decisiones que se relacionan con la experiencia del diseñador. La solución obtenida durante la etapa
de diseño debe lograr los objetivos de compensación. Sin embargo, los filtros pasivos presentan una
serie de desventajas puesto que no pueden modificar su característica de operación, tienen un bajo
desempeño a baja frecuencia, y además tienen la posibilidad de producir resonancias con el sistema
de distribución. Las notorias desventajas de los filtros pasivos han tratado de ser solucionadas a

2
través de filtros activos de potencia. Las distintas topologías investigadas en la literatura proponen
en su mayoría ventajas de operación, las que se han visto truncadas en su implementación por las
limitantes tecnológicas de los semiconductores.
Este trabajo presenta la combinación de filtros pasivos con un filtro activo en conexión
híbrida con la finalidad de obtener un mejor desempeño de compensación utilizando las ventajas de
ambas soluciones. La aplicación de esta alternativa de compensación se realiza considerando la
operación de cicloconversores de alta potencia en plantas de molienda.
1.2. Trabajos Previos
El material bibliográfico utilizado para el desarrollo de este trabajo abarca aspectos
normativos, investigación y aplicación de cicloconversores, filtros pasivos y filtros híbridos.
1.2.1 Normativas
La normativa eléctrica más importante aplicable a plantas industriales corresponde a la
Norma Técnica de Seguridad y Calidad de Servicio [1]. Esta norma define los aspectos específicos
que debe cumplir un cliente que desea conectarse a un sistema interconectado en Chile. Para el
desarrollo de este trabajo, destacan el factor de potencia y los límites de distorsión armónica, siendo
estos últimos idénticos a los recomendados en el IEEE Std. 519-1992 [2]. Las recomendaciones del
IEEE presentan una base teórica que permite comprender de mejor manera los problemas de calidad
de suministro eléctrico debidos distorsión armónica, además indica límites recomendados para un
amplio rango de tensiones nominales. En la literatura es común hacer referencia a este estándar
puesto que muchos países han considerado sus recomendaciones en la estructura de sus respectivas
normas relacionadas con calidad de la energía.
1.2.2 Respecto a cicloconversores
La molienda de minerales es un proceso intensivo en el uso de la energía y la
implementación mecánicamente eficiente utiliza enormes tambores que giran a una velocidad no
mayor a 20 revoluciones por minuto. Dada la baja velocidad mecánica, para accionar estos molinos
en un principio se utilizaban motores sincrónicos o de inducción, y la velocidad reducida se lograba
a través de cajas reductoras y engranes adosados al cilindro del molino. Posteriormente los
fabricantes comenzaron a alimentar estos motores a través de variadores de frecuencia para controlar
su velocidad. Todos estos cambios apuntaban a aumentar la eficiencia del proceso. Sin embargo, los

3
niveles de potencia y eficiencia alcanzados por los accionamientos basados en cicloconversores
hacen de esta tecnología la dominante en la actualidad para estas aplicaciones. El primer
accionamiento basado en cicloconversor con una potencia de 6500 kW fue instalado en 1969 en una
planta de cemento ubicada en Le Havre, Francia. Pasaron 20 años para que un accionamiento de este
tipo fuera instalado en la industria minera [3]. Desde entonces se han utilizado en numerosas
plantas, destacando Chile con aplicaciones que superan los 50 MW en molienda [7].
La investigación de cicloconversores está relacionada con modelos matemáticos complejos.
Dentro de la bibliografía utilizada destacan los siguientes trabajos:
“Thyristor Phase Controlled Converters and Cycloconverters” B. R. Pelly, Willey
Interscience, 1971, [4].
En este texto se analizan detalladamente convertidores AC/DC y AC/AC a través del
desarrollo de modelos matemáticos que permiten identificar el desempeño frente a distintas cargas.
El desarrollo también permite identificar las frecuencias de las componentes armónicas en las
variables de entrada y salida. Se muestra el efecto de la impedancia del sistema sobre la operación
de los convertidores. Lamentablemente los análisis se realizan considerando estado estacionario y no
se indican aspectos prácticos de la operación de los convertidores. Pese a esto, se muestran métodos
de control sencillos, pero efectivos para la operación de estos equipos. Un aspecto desarrollado en
este texto es el factor de desplazamiento de entrada con respecto a las condiciones de operación del
cicloconversor. Esta característica es de interés para estimar el flujo de potencia reactiva del
convertidor y ha servido de base para obtener conclusiones considerando información práctica.
Ronnie F. Chu, John J. Burns. “Impact of Cycloconverter Harmonics,” in IEEE Transactions
on Industry Applications. vol. 25, no. 3, May./June 1989, [5].
Se analiza la inyección armónica inferior a 500 Hz por parte cicloconversores. Se muestran
las condiciones que generan el peor escenario de operación y se registra el voltaje de alimentación
del convertidor durante 24 horas. Este registro incluye la distorsión debida a componentes de baja
frecuencia. Destaca la relación encontrada entre la impedancia del sistema y el método de
compensación para indicar el riesgo de resonancias.
4
Yazhou Liu, Gerald Thomas Heydt, Ron F. Chu. “The Power Quality Impact of
Cycloconverter Control Strategies,” in IEEE Transactions on Power Delivery. vol. 20, no. 2,
April 2005, [6].
Este trabajo estudia el efecto de la operación del cicloconversor en índices que miden la
calidad de la energía. En particular analiza la distorsión armónica total de la corriente de entrada con
respecto al índice de modulación. Para esto separa la distorsión en componentes armónicas
relacionadas con la topología y otro grupo de importancia relacionado con la operación. Este último
incluye el contenido subarmónico e interarmónico.
José R. Rodríguez, Jorge Pontt, Patricio Newman, Rodrigo Musalem, Hernán Miranda, Luis
Morán and Gerardo Alzamora. “Technical Evaluation and Practice Experience of High-
Power Grinding Mill Drives in Mining Applications,” in IEEE Transactions on Industry
Applications. vol. 41, no. 3, May/June 2005, [7].
Este trabajo muestra los requerimientos técnicos de un accionamiento para molienda de
minerales, indicando que pueden ser completamente cumplidos por cicloconversores y los
denominados load-commutated inverters. Se detallan las topologías de los convertidores y se
presentan elementos de compensación. Se concluye que nuevas instalaciones de molienda prefieren
el uso de cicloconversores por los elevados niveles de potencia y eficiencia. La compensación a
través de filtros pasivos se considera suficiente, pero no se discute sus desventajas ni requerimientos
para estos equipos.
1.2.3 Respecto a filtros pasivos
Los filtros pasivos son la solución tradicional para la compensación de potencia reactiva y
corrientes armónicas en los sistemas de distribución. Si bien la especificación de los elementos que
los componen es un proceso conocido y aceptado [8], en la literatura no se cubren aspectos
relacionados con el diseño. Dentro de la bibliografía utilizada destacan los siguientes trabajos
J. C. Das. “Passive Filters – Potentialities and Limitations,” in IEEE Transactions on
Industrial Electronics. vol. 40, no. 1, Jan./Feb. 2004, [9]..
Este trabajo indica que existen variados métodos de compensación, pero para aplicaciones
sobre 1MW los filtros pasivos son una alternativa económica. Se muestran las respuestas en

5
frecuencia y características de filtros pasa-banda y amortiguados. Se muestra un ejemplo de planta
industrial que presenta convertidores de 6 pulsos con distorsión armónica estimada a partir de las
formas de onda considerando ángulo de conmutación. Destaca el análisis de alternativas de
compensación con respecto a las distorsiones armónicas obtenidas, proponiéndose una metodología
iterativa para lograr los objetivos. Se indica que la potencia reactiva eventualmente puede mejorar la
compensación, pero no se cuantifica. En términos prácticos, este trabajo es el más ilustrativo para
comprender los pasos necesarios en el diseño de un esquema de compensación pasivo para
aplicaciones con convertidores de 6 y 12 pulsos.
Alexander B. Nassif, Wilsun Xu and Walmir Fleitas. “An Investigation on the Selection of
Filter Topologies for Passive Filter Applications,” in IEEE Transactions on Power Delivery.
vol. 24, no. 3, July 2009, [10].
Se indica que existen varias topologías de filtro pasivos que son efectivas, pero que hay un
vacío en la literatura sobre las ventajas y desventajas en cada una de ellas. Este vacío es resuelto por
la experiencia del diseñador y a través de requerimientos de diseño se logra hacer una contribución
para la toma de decisiones en filtros pasivos. Este trabajo concluye estas decisiones de diseño a
partir de resultados de distorsión de voltaje en todas las combinaciones posibles de topologías
restringidas a niveles de potencia reactiva. Estos resultados se ven notoriamente influenciados por el
sistema eléctrico simulado y no pueden considerarse como reglas generales para proponer
topologías en sistemas industriales.
Y. Xiao, J. Zhao and S. Mao. “Theory for the Design of C-type Filter,” presented at the 11th
International Conference on Harmonics and Quality of Power, 2004, [11].
El diseño de filtros tipo C difiere notablemente con respecto a filtros pasa-banda y pasa-altos.
En este trabajo se presenta un método de diseño basado en la optimización de los elementos
almacenadores de energía. Este se realiza a través de la minimización de la potencia reactiva del
inductor y condensador auxiliar. Los resultados obtenidos permiten definir este método como
general para el cálculo de parámetros de esta topología. Se indican además consideraciones para
determinar el amortiguamiento en aplicaciones de transmisión de corriente continua.
6
Babak Badrzadeh, Kenneth S. Smith and Roddy C. Wilson. “Design Passive Harmonic
Filters for an Aluminum Smelting Plant,” in IEEE Transactions on Industry Applications.
vol. 47, no. 2, March/April 2011, [12].
Se realiza el diseño de filtros pasivos para una planta industrial conectada al sistema eléctrico
por lo que se pone especial atención en las frecuencias donde ocurre resonancia y en la distorsión
total de voltaje para distintos escenarios de operación incluyendo generación interna. Se estima la
inyección de corrientes armónicas junto con las distorsiones de voltaje existentes sin los filtros
pasivos conectados, que son utilizadas para el diseño de filtros y la especificación de los elementos
que los componen. La evaluación de resonancias se estima a través de barridos de frecuencia de la
impedancia en el punto de conexión y el esquema propuesto de compensación se obtiene evaluando
diferentes alternativas para minimizar la distorsión total de voltaje. No se incluye información
adicional para indicar las razones del amortiguamiento utilizado, a la vez que indica distintos valores
de capacitancia en filtros con idéntico aporte de potencia reactiva.
1.2.4 Respecto a filtros híbridos
Los documentos estudiados que presentaron mayor interés para el desarrollo de este trabajo
se indican a continuación:
Subhashish Bhattacharya, Po-Tai Cheng and Deepak Divan. “Hybrid Solutions for
Improving Passive Filter Performance in High Power Applications,” in IEEE Transactions
on Industry Applications. vol. 33, no. 3, May/June 1997, [13].
Se propone el uso de filtros híbridos para compensar corrientes armónicas en cargas no
lineales (rectificadores controlados) que típicamente son compensadas con filtros pasivos. La
topología propuesta consta de dos filtros híbridos con etapas pasivas sintonizadas a la 5ª y 7ª
armónicas. Se muestra la capacidad de corregir las variaciones de sintonización de los elementos
pasivos para mejorar el desempeño del filtrado junto con limitar la corriente de compensación para
no exceder la especificación de la etapa pasiva. Las consideraciones en el control para la operación
de los filtros híbridos permiten que la potencia de las etapas activas no excedan de 3% con respecto
a la carga compensada. Destaca el método de control aplicado que permite amortiguar resonancias,
pero no se menciona el impacto en la potencia de la etapa activa por la operación en un rango de
frecuencias alejadas a la de sintonización de la etapa pasiva.
7
Rubén Inzunza and Hirofumi Akagi. “A 6.6 kV Transformerless Shunt Hybrid Active Filter
for Installation on a Power Distribution System,” in IEEE Transactions on Power
Electronics. vol. 20, no. 4, July 2005, [14].
Se propone una topología híbrida para la atenuación armónica en un sistema de distribución
de 6.6 kV. Debido a las características de la topología y a la especificación de los semiconductores,
la conexión de la etapa activa es directa a la etapa pasiva obviando los transformadores de
acoplamiento que se presentan en otros trabajos. El control utilizado transforma las variables a
coordenadas dq para extraer la 3ª, 5ª y 7ª armónicas presentes en pruebas de laboratorio. Los
resultados indican que se logra una efectiva atenuación de las componentes presentes con una
potencia menor a 2% con respecto a las características del sistema de distribución. La tensión de la
barra DC corresponde a 18% de la tensión de alimentación. Se entregan recomendaciones prácticas
para la puesta en marcha de la etapa activa, pero no se discute la operación frente a distorsiones de
mayor frecuencia.
Darwin Rivas, Luis Morán, Juan Dixon and José R. Espinoza. “Improving Passive Filter
Compensation Performance with Active Techniques,” in IEEE Transactions on Industrial
Electronics. vol. 50, no. 1, February 2003, [15].
Este trabajo analiza distintas condiciones que desintonizan filtros pasivos y que afectan su
desempeño. Indica además que la operación de filtros pasivos con reducidos niveles de cargas puede
producir sobretensiones, las que se pueden reducir controlando el flujo de potencia reactiva. Se
muestra, a través del denominado factor de atenuación, la capacidad del filtro híbrido para mejorar
el desempeño de la etapa pasiva. El esquema propuesto se simula para compensar una planta que
presenta 4 convertidores de 18 MW reduciendo considerablemente la distorsión de corriente. Se
indica que existen escenarios que pueden producir resonancia, pero esto es limitado por el filtro
híbrido. Se obtienen resultados experimentales con la implementación de un prototipo en diferentes
condiciones de operación. Estos resultados muestran lo ventajoso de la topología híbrida, sin
embargo, la compensación pasiva utilizada no presenta un desempeño adecuado para compensar por
sí sola la carga. Por otra parte, no se indican las especificaciones de potencia del filtro híbrido con
respecto a la carga.
8
1.3. Hipótesis de Trabajo
El desarrollo de esta memoria de título está basado en las siguientes hipótesis:
- La operación de una planta industrial que utiliza accionamientos basados en cicloconversores
y otros convertidores requiere la compensación de potencia reactiva y de corrientes
armónicas.
- El diseño de filtros pasivos, por si solo, es un problema con infinitas soluciones dado que es
un sistema con más variables que ecuaciones.
- Restricciones prácticas pueden acotar las soluciones permitiendo cumplir los objetivos de
compensación.
- La topología híbrida tiene la capacidad de mejorar el desempeño de compensación en una
planta industrial. Los requerimientos de la etapa activa se pueden reducir a través de
restricciones de compensación.
1.4. Objetivos
1.4.1 Objetivo General
Analizar la operación de cicloconversores y estudiar las variables involucradas en el diseño
de filtros pasivos para proponer una topología híbrida que presente un adecuado desempeño para la
compensación de potencia reactiva y corrientes armónicas.
1.4.2 Objetivos Específicos
Analizar la operación de cicloconversores desde el punto de vista del flujo de potencia
reactiva y de la inyección de corrientes armónicas.
Analizar las variables de diseño de los filtros pasivos para determinar el impacto en las
pérdidas, atenuación armónica y costo cualitativo.
Diseñar un esquema de compensación pasivo para una planta de molienda real.
Proponer una topología de filtro híbrido con reducidos requerimientos de potencia de la etapa
activa.

9
1.5. Alcances y Limitaciones
El alcance de este trabajo es el diseño de filtros pasivos y el potencial del filtro híbrido para
mejorar el desempeño de la compensación de las componentes interarmónicas de corriente en
aplicaciones industriales. El estudio de las magnitudes y frecuencias armónicas de los
cicloconversores está limitado a simulaciones considerando tensión de alimentación balanceada,
tiristores ideales y carga trifásica balanceada tipo RLV (componente resistiva R, inductiva L y
tensión inducida V).
1.6. Temario
En el Capítulo 2 se presentan los principios de operación y topologías de los
cicloconversores. Se indican las principales características de operación sobre la base de análisis
matemático y simulaciones. El Capítulo 3 corresponde al estudio y diseño de filtros pasivos
orientados a la aplicación de accionamientos basados en cicloconversores y cargas no lineales en
sistemas industriales. El Capítulo 4 muestra el principio de operación del filtro híbrido paralelo y se
propone una topología con requerimientos de potencia reducidos de la etapa activa. Finalmente en el
Capítulo 5 se presentan las conclusiones y la recomendación de trabajos futuros.
10
Capítulo 2. Características del Cicloconversor
2.1. Introducción
El control de torque y velocidad en máquinas de corriente alterna no sería posible de no ser
por la electrónica de potencia con la que se pueden implementar distintas topologías de
convertidores capaces de generar voltaje y/ó corriente de magnitud y frecuencia variables. El
desarrollo tecnológico del tiristor lo ha llevado a estar en la cima de los semiconductores en lo que
respecta a tensiones de bloqueo y capacidad de corriente para aplicaciones de rectificación o
accionamientos de velocidad variable de alta potencia. El cicloconversor, formado con tiristores, es
un convertidor robusto que es utilizado para accionamientos de motores sincrónicos de gran
potencia. Para estudios de flujos de potencia, normalmente el cicloconversor es modelado como un
convertidor con diodos en la etapa de entrada, sin embargo, este corresponde a un equipo que
presenta distintos modos de operación y características que difieren notablemente a los
convertidores estáticos convencionales que utilizan diodos y/o semiconductores controlados.
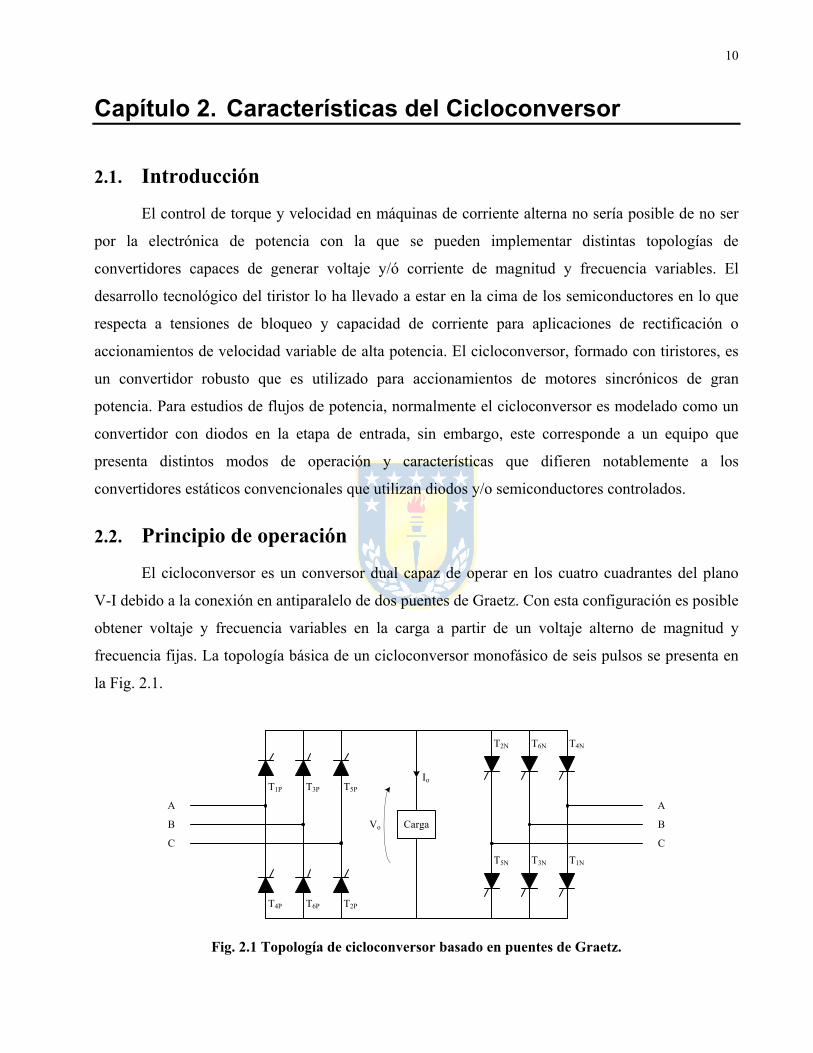
2.2. Principio de operación
El cicloconversor es un conversor dual capaz de operar en los cuatro cuadrantes del plano
V-I debido a la conexión en antiparalelo de dos puentes de Graetz. Con esta configuración es posible
obtener voltaje y frecuencia variables en la carga a partir de un voltaje alterno de magnitud y
frecuencia fijas. La topología básica de un cicloconversor monofásico de seis pulsos se presenta en
la Fig. 2.1.
Carga
T1P T3P T5P
T4P T6P T2P
T2N T6N T4N
T5N T3N T1N
A
B
C
A
B
C
Io
Vo
Fig. 2.1 Topología de cicloconversor basado en puentes de Graetz.

11
En la Fig. 2.1 se indica una dirección positiva de corriente que puede provenir sólo del
convertidor positivo, ya que por las características físicas del tiristor éste no admite corriente en
sentido inverso.
El disparo de los tiristores se realiza utilizando una estrategia de control adecuada, siendo el
sincronismo coseno la más utilizada. Esta estrategia se basa en la comparación de una señal de
referencia con los cosenos formados convenientemente por los voltajes de alimentación. Como
resultado se obtiene un voltaje de salida compuesto por secciones de los voltajes de entrada. En la
Fig. 2.2 se puede apreciar, en por unidad, el voltaje de salida formado mayoritariamente por la
componente debida a la señal de referencia sumada a una distorsión inherente al convertidor.
Fig. 2.2 Generación de voltaje de salida del cicloconversor a partir de voltajes de entrada.
Esta topología produce 6 secciones en el voltaje de salida por cada periodo de la red de
alimentación. Esto es similar a lo observado en rectificadores de 6 pulsos con la diferencia que las
secciones de voltaje son distintas entre sí incluso si los voltajes de la red son perfectamente
balanceados.
La operación de los cicloconversores se realiza según la configuración de la topología, la que
define las siguientes alternativas:
Modo con corriente circulante.
Modo sin corriente circulante.

12
2.2.1 Modo con corriente circulante
Los cicloconversores que emplean el modo con corriente circulante alimentan la carga con
convertidor positivo y negativo en operación. Como consecuencia de esta operación, existe una
circulación de corriente entre ambos convertidores que es limitada por el reactor. El control de este
modo de operación se muestra en la Fig. 2.3.
Fig. 2.3 Control de modo con corriente circulante.
Los ángulos de disparo en ambos convertidores cumplen con la expresión dada en (2.1).
180P N (2.1)
donde,
P : ángulo de disparo aplicado al convertidor positivo
N : ángulo de disparo aplicado al convertidor negativo
Este modo de control se presenta como solución cuando la carga tiene tendencia a operar con
corriente discontinua, ya que emplea reactores con punto medio entre los convertidores positivo y
negativo de manera de solucionar algunos problemas de conmutación que se presentan en el modo
sin corriente circulante. La presencia de reactores hace que el voltaje en terminales de la carga tenga
un menor contenido armónico, por lo tanto se puede obtener mayores frecuencias de salida llegando
en algunas aplicaciones hasta dos tercios la frecuencia fundamental con una distorsión aceptable [4].
Los reactores deben filtrar la componente de 300 Hz por lo que tienen una inductancia considerable
13
lo que aumenta el costo del cicloconversor y el espacio físico utilizado. Por otra parte, la potencia
reactiva que circula en la entrada es mayor en comparación al modo sin corriente circulante,
elevando la potencia nominal del cicloconversor. Estas características han llevado al modo con
corriente circulante a ser una opción poco aplicada cuando los niveles de potencia requeridos son
altos.
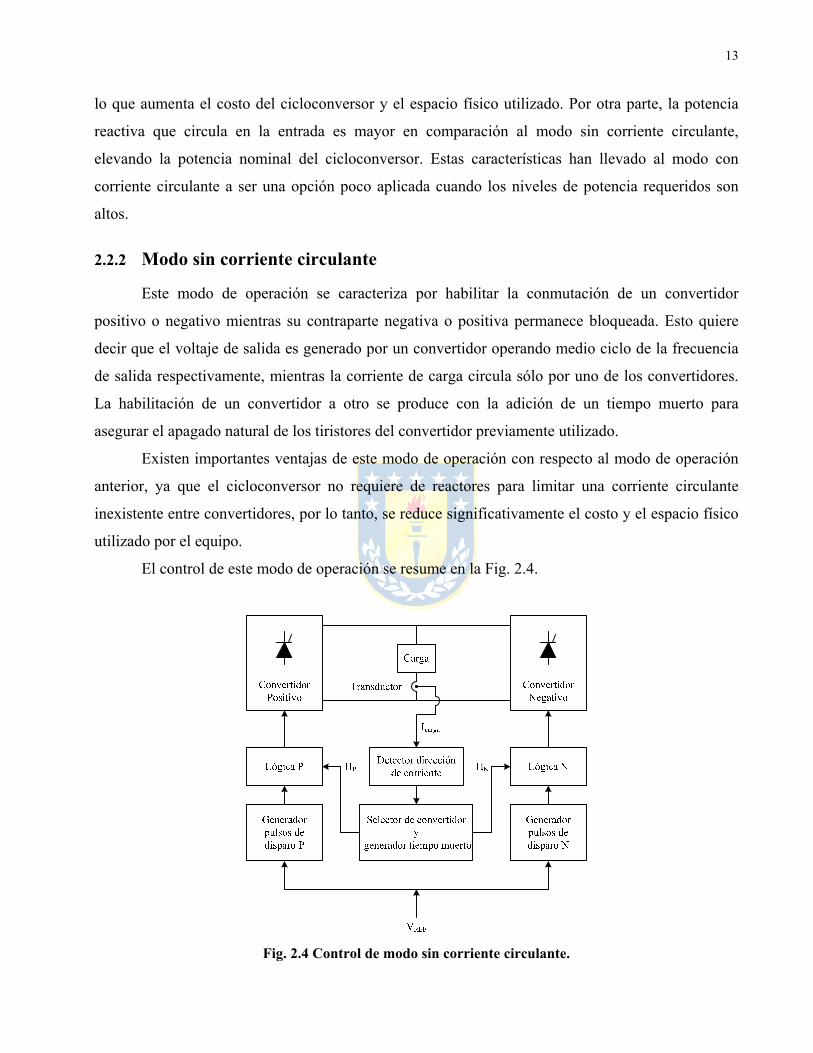
2.2.2 Modo sin corriente circulante
Este modo de operación se caracteriza por habilitar la conmutación de un convertidor
positivo o negativo mientras su contraparte negativa o positiva permanece bloqueada. Esto quiere
decir que el voltaje de salida es generado por un convertidor operando medio ciclo de la frecuencia
de salida respectivamente, mientras la corriente de carga circula sólo por uno de los convertidores.
La habilitación de un convertidor a otro se produce con la adición de un tiempo muerto para
asegurar el apagado natural de los tiristores del convertidor previamente utilizado.
Existen importantes ventajas de este modo de operación con respecto al modo de operación
anterior, ya que el cicloconversor no requiere de reactores para limitar una corriente circulante
inexistente entre convertidores, por lo tanto, se reduce significativamente el costo y el espacio físico
utilizado por el equipo.
El control de este modo de operación se resume en la Fig. 2.4.
Fig. 2.4 Control de modo sin corriente circulante.

14
La función del transductor es sensar la corriente de carga que luego es procesada por un
bloque que detecta la condición de la corriente. Este resultado habilita los pulsos de disparo en el
convertidor positivo o negativo aplicando un tiempo muerto en la transición. Los pulsos de disparo
se generan utilizando un método de sincronización el cual sigue el voltaje de referencia que
corresponde a la función de modulación.
Las formas de onda normalizadas del voltaje y corriente de salida se muestran en la Fig. 2.5
y Fig. 2.6 respectivamente. La transición del convertidor positivo a negativo se observa claramente
en la forma de onda de la corriente dado que se aplica un tiempo muerto en el cruce por cero.
Destaca la presencia de una tensión distinta de la red en este periodo, la que corresponde a la tensión
inducida de la carga.
Fig. 2.5 Forma de onda de tensión con control en modo sin corriente circulante.
Fig. 2.6 Forma de onda de corriente con control en modo sin corriente circulante.

15
2.2.3 Inyección de tercera armónica
La tensión de salida máxima del cicloconversor depende de la topología y de las tensiones de
alimentación. La señal moduladora o de referencia tiene incidencia directa sobre la frecuencia y
magnitud del voltaje de salida. En [17] se describe la inyección de distorsión armónica para
incrementar el voltaje de salida de inversores trifásicos modulados por ancho de pulso. Este
procedimiento también es aplicable a cicloconversores y en este trabajo se utiliza la inyección de
tercera armónica tal como se indica en (2.2).
1( ) (sin sin 3 )
6o o of r (2.2)
donde,
o : 2 of t
of : frecuencia de salida del cicloconversor
r : índice de modulación
El uso de esta señal moduladora permite incrementar en aproximadamente un 15% la tensión
con respecto a utilizar una referencia compuesta sólo por la señal fundamental. El requisito es que se
debe aplicar sólo en cargas con conexión en delta o estrella sin retorno por neutro para evitar la
circulación de corriente de 3ª armónica. El efecto de la inyección de tercera armónica para un índice
de modulación 1.1 se muestra en la Fig. 2.7.
Fig. 2.7 Señal de referencia para un índice de modulación 1.1.
16
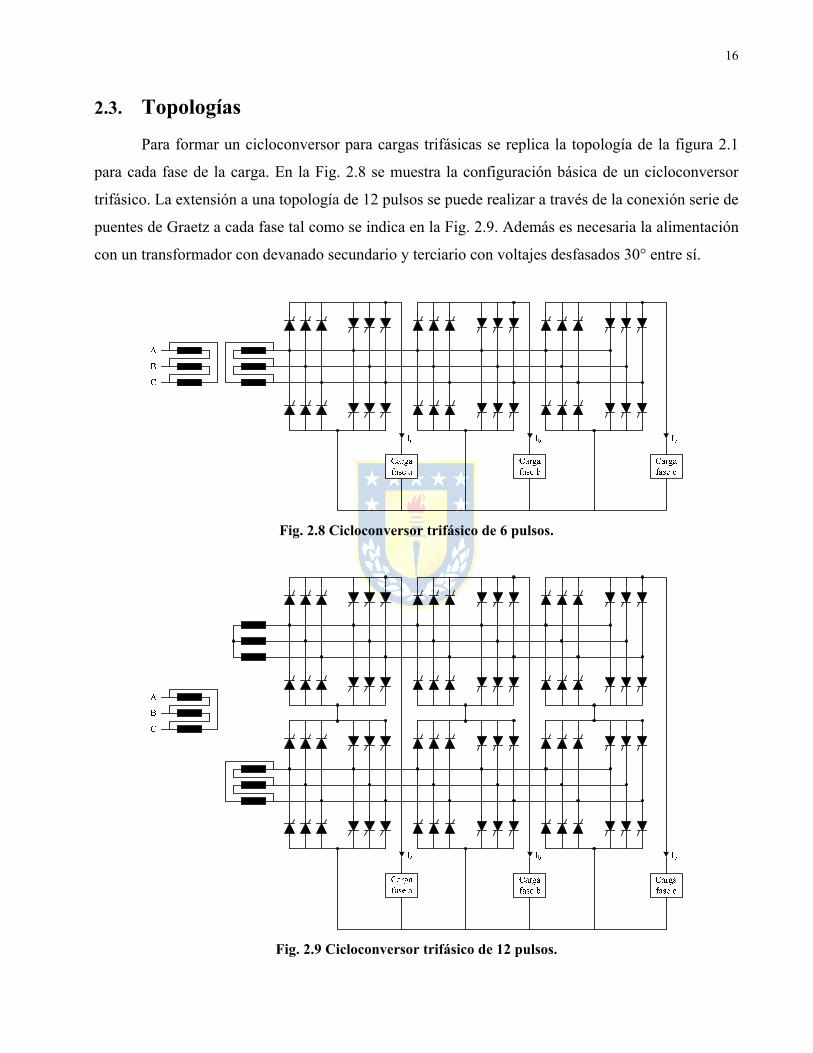
2.3. Topologías
Para formar un cicloconversor para cargas trifásicas se replica la topología de la figura 2.1
para cada fase de la carga. En la Fig. 2.8 se muestra la configuración básica de un cicloconversor
trifásico. La extensión a una topología de 12 pulsos se puede realizar a través de la conexión serie de
puentes de Graetz a cada fase tal como se indica en la Fig. 2.9. Además es necesaria la alimentación
con un transformador con devanado secundario y terciario con voltajes desfasados 30° entre sí.
Fig. 2.8 Cicloconversor trifásico de 6 pulsos.
Fig. 2.9 Cicloconversor trifásico de 12 pulsos.

17
Estas topologías se utilizan en la literatura para analizar el desempeño. En la práctica, las
topologías tienen las siguientes características:
Transformador primario por cada fase de carga.
Carga en conexión estrella con neutro aislado.
Modo sin corriente circulante.
Existen dos topologías de cicloconversores de 12 pulsos que se utilizan extensamente en la
industria. Éstas se muestran en la Fig. 2.10 y 2.11.
Fig. 2.10 Cicloconversor trifásico de 12 pulsos con convertidores en conexión serie.

18
Fig. 2.11 Cicloconversor trifásico de 12 pulsos para máquina con doble bobinado de estator.
La topología mostrada en la Fig. 2.10 tiene convertidores conectados en serie lo que permite
aumentar la tensión de salida, mientras que la topología de la Fig. 2.11 tiene una menor tensión
aplicada a los bobinados de estator, pero la corriente proviene de dos convertidores en fase. Ambas
topologías presentan idénticas características a la entrada.
2.4. Factor de desplazamiento de entrada
En convertidores estáticos se define el factor de potencia y factor de desplazamiento en la
entrada del equipo. El factor de potencia corresponde a la relación entre la potencia activa y la
potencia aparente tal como se indica en (2.3).
Pfp
S (2.3)
La potencia aparente S es el producto del voltaje y corriente rms, mientras que la potencia
activa P se conforma por la sumatoria de la potencia activa fundamental y la producida por el
contenido armónico si hubiere. Cuando se tiene que la corriente de cortocircuito en el punto de
conexión del convertidor es mucho mayor a la corriente nominal del equipo, la distorsión armónica
del voltaje puede despreciarse dando como resultado la siguiente expresión para el factor de
potencia.

19
11cos
Ifp
I (2.4)
donde,
1I : corriente fundamental en la entrada
I : corriente rms en la entrada
1 : ángulo de desfase entre el voltaje y la corriente a frecuencia fundamental
El factor de desplazamiento en la entrada es la relación entre la potencia activa y potencia
aparente a frecuencia fundamental resultando la expresión indicada en (2.5). En sistemas en que no
hay presencia de contenido armónico éste es igual al denominado factor de potencia.
1cosfd (2.5)
Resulta importante en cicloconversores conocer el factor de desplazamiento en su entrada, ya
que provee información con respecto al flujo de potencia reactiva debido a la operación del
convertidor.
A partir del análisis descrito en [4], la corriente fundamental a la entrada del cicloconversor
trifásico se puede descomponer en las componentes activa IP y reactiva IQ, las que están dadas por
las siguientes expresiones:
33 cos
2P o o
rI s I
(2.6)
21
20
cos 22 33
(2 1)(2 1)n o
Q on
a nI s I
n n
(2.7)
Los términos 21 n
a se determinan como sigue a partir de (2.8) y (2.9).
0
21
1
0
1cos sin ( )
2 o oa f d
(2.8)
20
2
21
1
0
1cos sin ( ) cos 2
n o o oa f n d
(2.9)
donde,
s : número de pulsos
oI : corriente rms en la carga a la frecuencia de salida
o : ángulo de desplazamiento de la carga
of : frecuencia de salida del cicloconversor
o : 2 of t
r : magnitud de la referencia de la señal moduladora
Por lo tanto, el factor de desplazamiento de entrada del cicloconversor está dado por (2.10).
21
1 01
cos 24
(2 1)(2 1)cos cos tan
cos
n o
n
o
a n
n nr
(2.10)
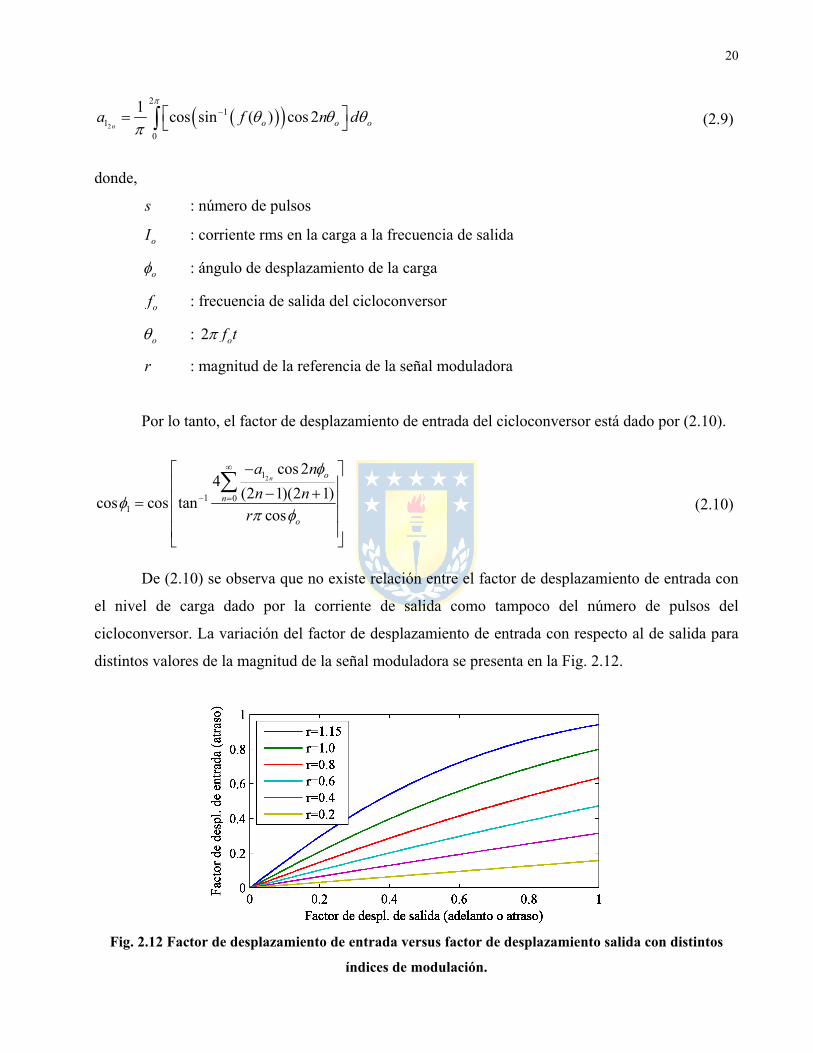
De (2.10) se observa que no existe relación entre el factor de desplazamiento de entrada con
el nivel de carga dado por la corriente de salida como tampoco del número de pulsos del
cicloconversor. La variación del factor de desplazamiento de entrada con respecto al de salida para
distintos valores de la magnitud de la señal moduladora se presenta en la Fig. 2.12.
Fig. 2.12 Factor de desplazamiento de entrada versus factor de desplazamiento salida con distintos
índices de modulación.

21
La Fig. 2.12 muestra que se puede obtener el menor flujo de potencia reactiva en la entrada
del cicloconversor si se opera con factor de desplazamiento unitario en la salida. Esto corresponde a
la operación con nula potencia reactiva en la carga.
Un resultado de interés se obtiene al imponer el ángulo de desplazamiento de la carga igual a
cero. De esta manera de obtiene la relación teórica entre el factor de desplazamiento en la entrada y
la magnitud de la referencia sinusoidal considerando que la carga no demanda potencia reactiva. En
la Fig. 2.13 se presenta el resultado obtenido. La relación es prácticamente lineal y sirve de base
para analizar la característica de potencia del cicloconversor.
Fig. 2.13 Factor de desplazamiento de entrada versus índice de modulación sin flujo de potencia
reactiva en la carga.
2.5. Característica de potencia de entrada
La característica de potencia de entrada de un cicloconversor está directamente relacionada
con el control que se realiza en la máquina. Normalmente el control busca mantener un flujo
nominal, para lo cual aplica el voltaje según la frecuencia de salida y condición de carga. Para
efectos prácticos puede considerarse que la relación V/fo se mantiene constante e igual al valor dado
por sus valores nominales. En la entrada la corriente que demanda el cicloconversor es controlada
para no exceder el valor nominal en régimen permanente y el máximo durante la partida de la
máquina para favorecer el torque en la máquina. Con estas consideraciones se puede trazar la curva
de potencia activa del cicloconversor con respecto a la magnitud de la referencia sinusoidal como
muestra la Fig. 2.14.
22
Fig. 2.14 Curva de operación de potencia activa en por unidad.
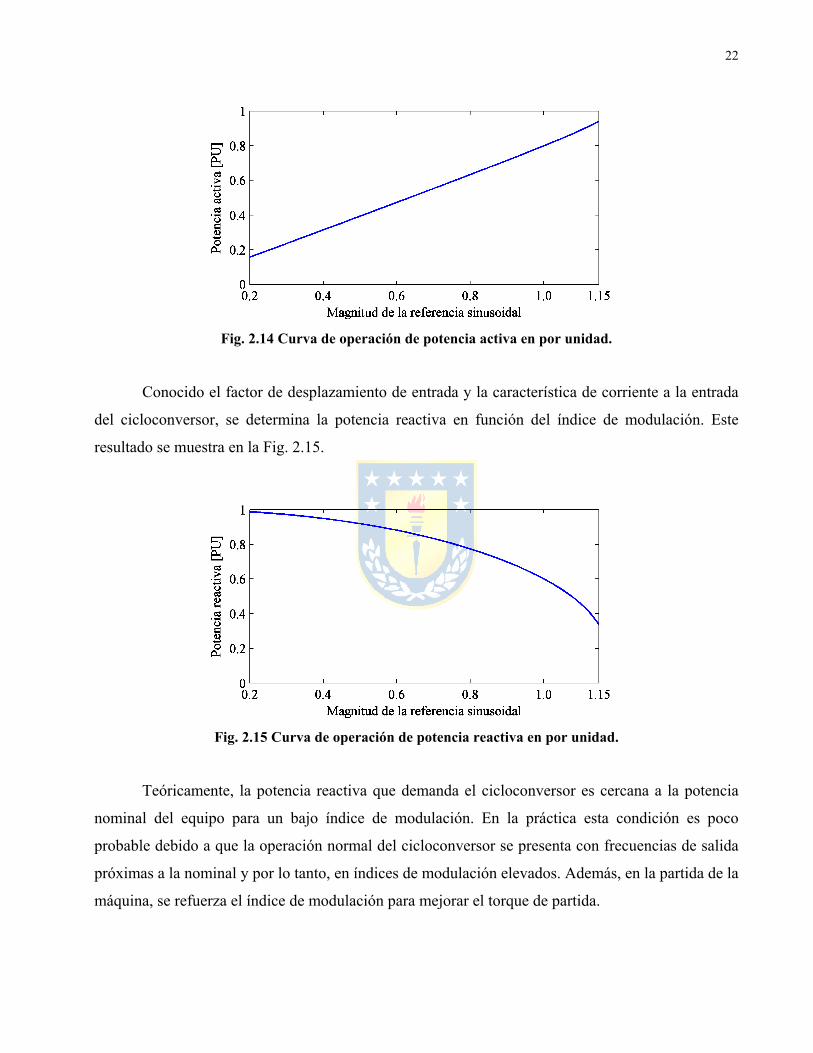
Conocido el factor de desplazamiento de entrada y la característica de corriente a la entrada
del cicloconversor, se determina la potencia reactiva en función del índice de modulación. Este
resultado se muestra en la Fig. 2.15.
Fig. 2.15 Curva de operación de potencia reactiva en por unidad.
Teóricamente, la potencia reactiva que demanda el cicloconversor es cercana a la potencia
nominal del equipo para un bajo índice de modulación. En la práctica esta condición es poco
probable debido a que la operación normal del cicloconversor se presenta con frecuencias de salida
próximas a la nominal y por lo tanto, en índices de modulación elevados. Además, en la partida de la
máquina, se refuerza el índice de modulación para mejorar el torque de partida.
23
2.6. Distorsión armónica de la corriente de entrada
El cicloconversor trifásico inyecta a la red un contenido armónico en corriente que difiere a
lo típicamente observado en rectificadores con diodos o tiristores. El contenido armónico de la
corriente de entrada presenta componentes características producto de la topología (número de
pulsos), y una cantidad no despreciable de componentes no características debido de la operación
(relacionadas con la frecuencia de salida). La presencia de este contenido armónico para condición
balanceada está dada por (2.11).
1
( 1) 6 ofh k p nf
(2.11)
donde,
h : orden armónico
k : 0, 1, 2, 3,…
p : número de pulsos del cicloconversor
n : 0, 1, 2, 3,…
of : frecuencia de salida del cicloconversor
1f : frecuencia del sistema
Puesto que el contenido armónico de la corriente de entrada presenta armónicos que no son
múltiplos enteros de la componente fundamental (armónicos no característicos), la serie de Fourier
tradicional entrega un resultado erróneo con una marcada componente continua. Para solucionar este
inconveniente se utiliza una serie de Fourier modificada que calcula las componentes armónicas en
una ventana de tiempo mayor al dado por la frecuencia fundamental que luego es corregido para
identificar claramente el orden armónico de cada componente.
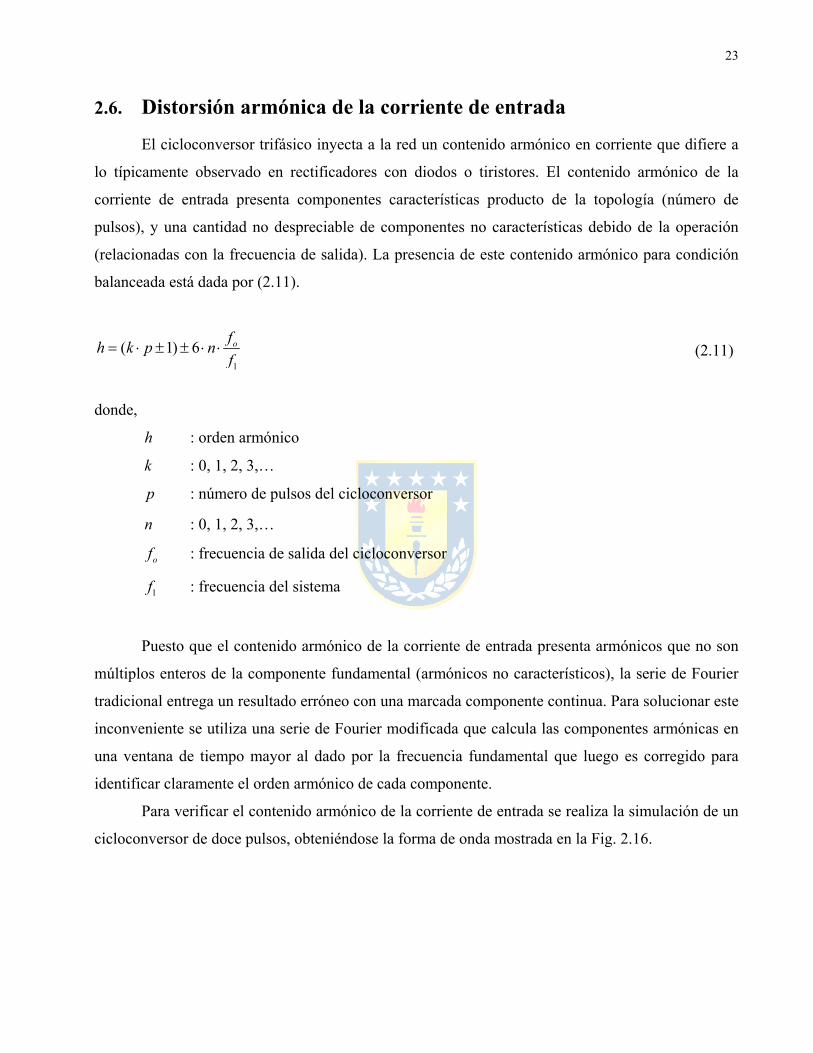
Para verificar el contenido armónico de la corriente de entrada se realiza la simulación de un
cicloconversor de doce pulsos, obteniéndose la forma de onda mostrada en la Fig. 2.16.
24
Fig. 2.16 Forma de onda de la corriente de entrada del cicloconversor de 12 pulsos.
A primera vista se observa una variación de baja frecuencia en la corriente que se asemeja a
un sistema que no se encuentra en estado estable. Esto en realidad se debe a la existencia de
componentes armónicas de baja frecuencia, siendo más evidente en el espectro en frecuencia que se
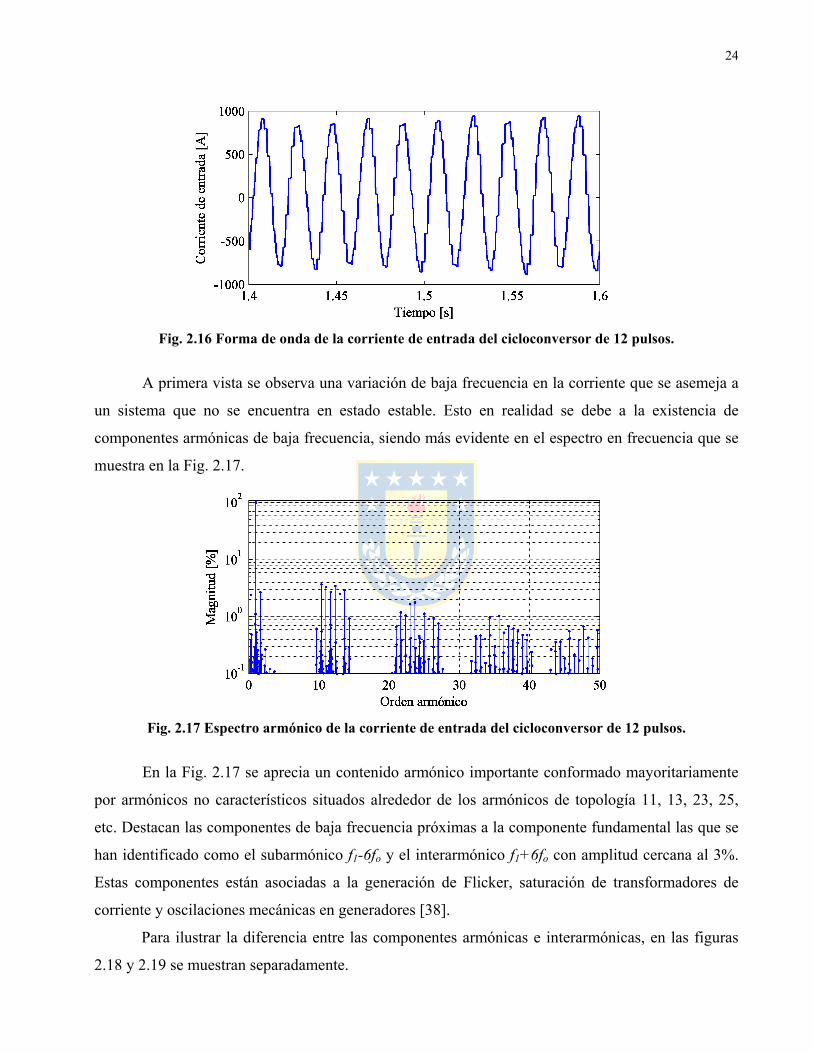
muestra en la Fig. 2.17.
Fig. 2.17 Espectro armónico de la corriente de entrada del cicloconversor de 12 pulsos.
En la Fig. 2.17 se aprecia un contenido armónico importante conformado mayoritariamente
por armónicos no característicos situados alrededor de los armónicos de topología 11, 13, 23, 25,
etc. Destacan las componentes de baja frecuencia próximas a la componente fundamental las que se
han identificado como el subarmónico f1-6fo y el interarmónico f1+6fo con amplitud cercana al 3%.
Estas componentes están asociadas a la generación de Flicker, saturación de transformadores de
corriente y oscilaciones mecánicas en generadores [38].
Para ilustrar la diferencia entre las componentes armónicas e interarmónicas, en las figuras
2.18 y 2.19 se muestran separadamente.

25
Fig. 2.18 Contenido armónico característico de la corriente de entrada del cicloconversor de 12 pulsos.
Fig. 2.19 Contenido no característico de la corriente de entrada del cicloconversor de 12 pulsos.
En general, la distorsión armónica total se define para enteros de la frecuencia fundamental,
sin embargo es posible separar el THD de armónicos característicos y no característicos [6] según
las expresiones (2.12) y (2.13), para posteriormente determinar el THD total dado por (2.14).
2
.
.1
hh caract
caract
I
THDI
(2.12)
2
.
.1
hh no caract
no caract
I
THDI
(2.13)
26
2 2. .caract no caractTHD THD THD (2.14)
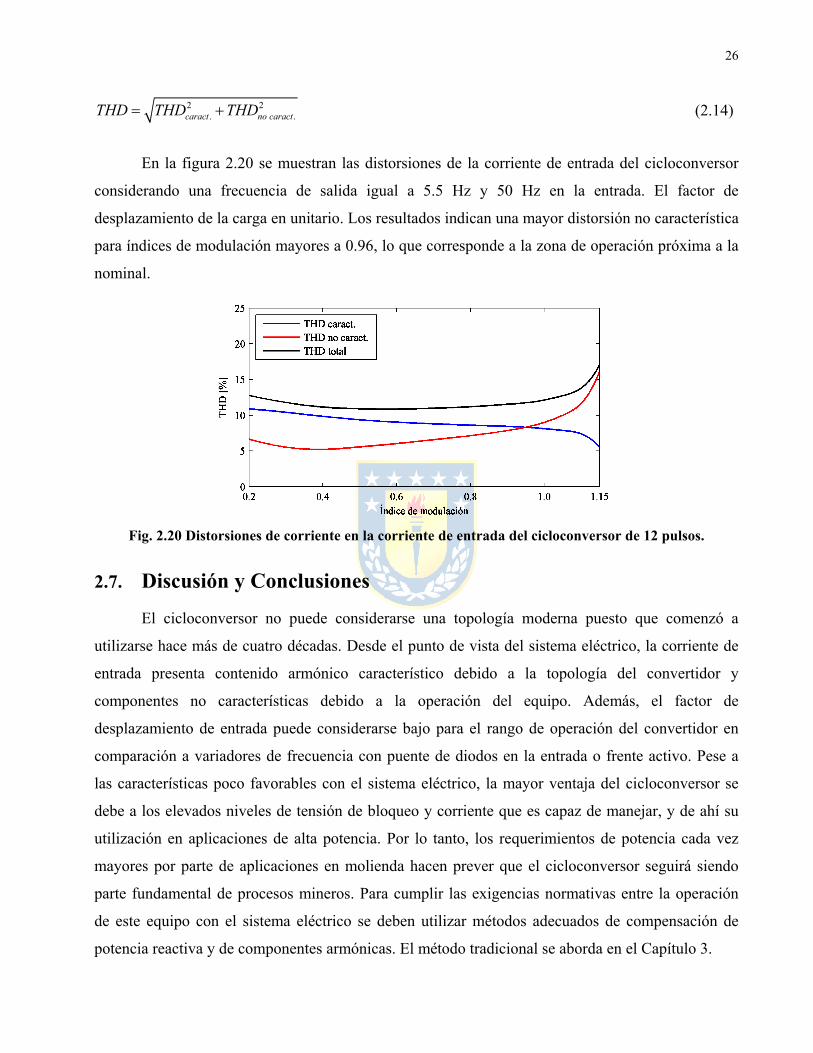
En la figura 2.20 se muestran las distorsiones de la corriente de entrada del cicloconversor
considerando una frecuencia de salida igual a 5.5 Hz y 50 Hz en la entrada. El factor de
desplazamiento de la carga en unitario. Los resultados indican una mayor distorsión no característica
para índices de modulación mayores a 0.96, lo que corresponde a la zona de operación próxima a la
nominal.
Fig. 2.20 Distorsiones de corriente en la corriente de entrada del cicloconversor de 12 pulsos.
2.7. Discusión y Conclusiones
El cicloconversor no puede considerarse una topología moderna puesto que comenzó a
utilizarse hace más de cuatro décadas. Desde el punto de vista del sistema eléctrico, la corriente de
entrada presenta contenido armónico característico debido a la topología del convertidor y
componentes no características debido a la operación del equipo. Además, el factor de
desplazamiento de entrada puede considerarse bajo para el rango de operación del convertidor en
comparación a variadores de frecuencia con puente de diodos en la entrada o frente activo. Pese a
las características poco favorables con el sistema eléctrico, la mayor ventaja del cicloconversor se
debe a los elevados niveles de tensión de bloqueo y corriente que es capaz de manejar, y de ahí su
utilización en aplicaciones de alta potencia. Por lo tanto, los requerimientos de potencia cada vez
mayores por parte de aplicaciones en molienda hacen prever que el cicloconversor seguirá siendo
parte fundamental de procesos mineros. Para cumplir las exigencias normativas entre la operación
de este equipo con el sistema eléctrico se deben utilizar métodos adecuados de compensación de
potencia reactiva y de componentes armónicas. El método tradicional se aborda en el Capítulo 3.
27
Capítulo 3. Filtros Pasivos para Compensación de Potencia Reactiva y Corrientes Armónicas
3.1. Introducción
Los filtros pasivos han sido durante mucho tiempo la elección indiscutible para atenuar
contenido armónico y compensar potencia reactiva de equipos rectificadores en procesos de
electrólisis, hornos de arco, transmisión en HVDC, variadores de frecuencia y cicloconversores para
molienda. El diseño de filtros pasivos es una tarea compleja que debe considerar el espectro
armónico de la corriente de entrada de la carga no lineal, la compensación de potencia reactiva, las
características del sistema de distribución, pérdidas y eventualmente reducir la dispersión en el valor
de los parámetros de los componentes usados.
El presente capítulo tiene como objetivos indicar las alternativas actuales en filtros pasivos y
los métodos de selección de sus componentes orientado a aplicaciones de molienda de alta potencia.
Se analizan las topologías que se aplican en la industria en sistemas de media tensión, las que se
denominan:
Filtro pasa-banda.
Filtro pasa-altos de 2° orden.
Filtro tipo C.
Cada una de estas topologías se analiza con respecto a las pérdidas y a la efectividad en la
atenuación armónica. Estas características se ven influenciadas por la potencia reactiva Q1 y
frecuencia de sintonización (dada por el orden de sintonía ht). Además se indican criterios en la
distribución de potencia reactiva y costo desde el punto de vista cualitativo. Finalmente se indican
recomendaciones para el diseño de filtros pasivos acompañado de un ejemplo de aplicación.
3.2. Filtro pasa-banda
El filtro pasa-banda es el filtro más básico que se utiliza para compensar contenido
armónico. Por fase se compone de un inductor L en serie a un condensador C. Junto a estos
elementos se tiene de manera natural una componente resistiva RL, no despreciable, que se encuentra
en serie al inductor la que debe ser considerada en el diseño para analizar la efectividad y las
pérdidas del filtro. El modelo monofásico se indica en la Fig. 3.1.
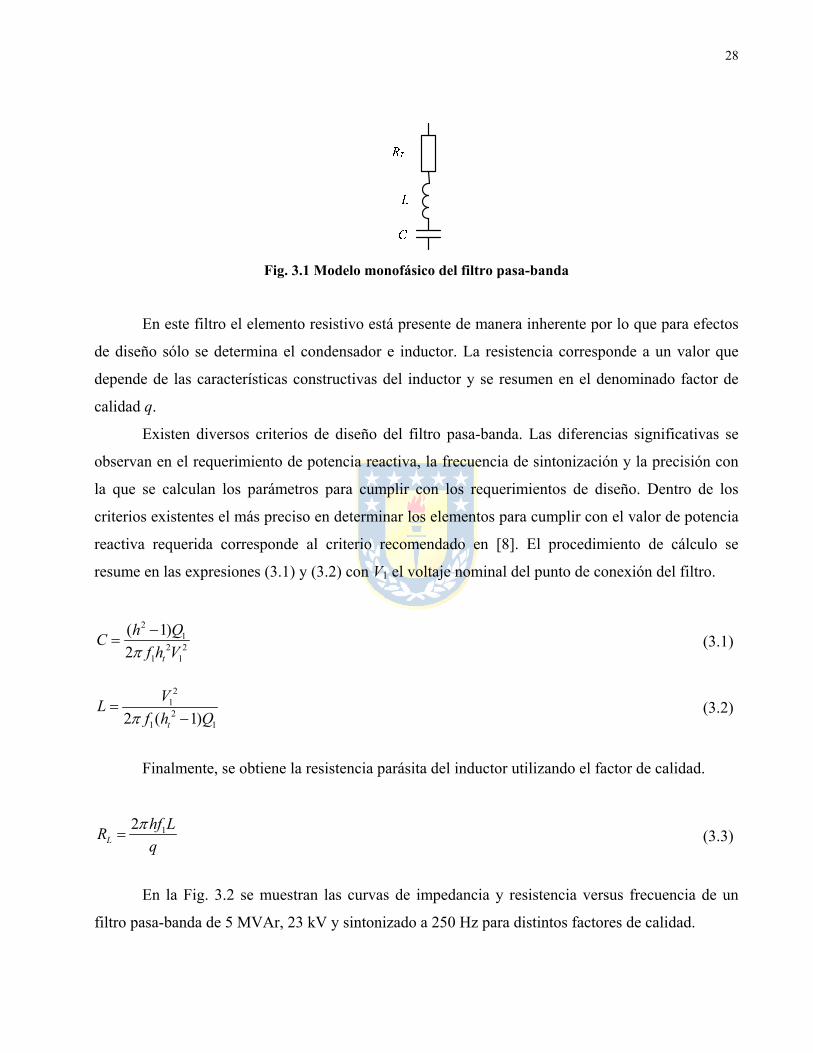
28
Fig. 3.1 Modelo monofásico del filtro pasa-banda
En este filtro el elemento resistivo está presente de manera inherente por lo que para efectos
de diseño sólo se determina el condensador e inductor. La resistencia corresponde a un valor que
depende de las características constructivas del inductor y se resumen en el denominado factor de
calidad q.
Existen diversos criterios de diseño del filtro pasa-banda. Las diferencias significativas se
observan en el requerimiento de potencia reactiva, la frecuencia de sintonización y la precisión con
la que se calculan los parámetros para cumplir con los requerimientos de diseño. Dentro de los
criterios existentes el más preciso en determinar los elementos para cumplir con el valor de potencia
reactiva requerida corresponde al criterio recomendado en [8]. El procedimiento de cálculo se
resume en las expresiones (3.1) y (3.2) con V1 el voltaje nominal del punto de conexión del filtro.
21
2 21 1
( 1)
2 t
h QC
f h V
(3.1)
2
12
1 12 ( 1)t
VL
f h Q
(3.2)
Finalmente, se obtiene la resistencia parásita del inductor utilizando el factor de calidad.
12L
hf LR
q
(3.3)
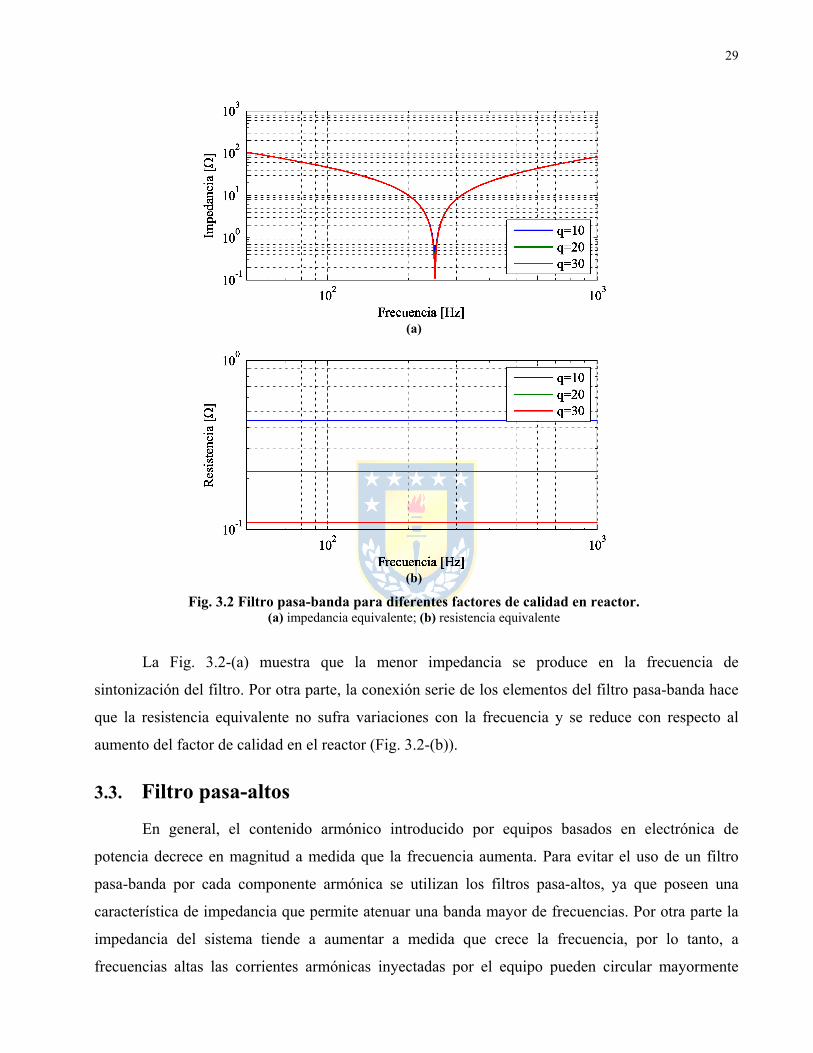
En la Fig. 3.2 se muestran las curvas de impedancia y resistencia versus frecuencia de un
filtro pasa-banda de 5 MVAr, 23 kV y sintonizado a 250 Hz para distintos factores de calidad.
29
(a)
(b)
Fig. 3.2 Filtro pasa-banda para diferentes factores de calidad en reactor. (a) impedancia equivalente; (b) resistencia equivalente
La Fig. 3.2-(a) muestra que la menor impedancia se produce en la frecuencia de
sintonización del filtro. Por otra parte, la conexión serie de los elementos del filtro pasa-banda hace
que la resistencia equivalente no sufra variaciones con la frecuencia y se reduce con respecto al
aumento del factor de calidad en el reactor (Fig. 3.2-(b)).
3.3. Filtro pasa-altos
En general, el contenido armónico introducido por equipos basados en electrónica de
potencia decrece en magnitud a medida que la frecuencia aumenta. Para evitar el uso de un filtro
pasa-banda por cada componente armónica se utilizan los filtros pasa-altos, ya que poseen una
característica de impedancia que permite atenuar una banda mayor de frecuencias. Por otra parte la
impedancia del sistema tiende a aumentar a medida que crece la frecuencia, por lo tanto, a
frecuencias altas las corrientes armónicas inyectadas por el equipo pueden circular mayormente

30
hacia los filtros pasa-altos mejorando con esto la eficacia de este tipo de filtro. Se tiene además
que la topología del filtro pasa-altos es similar al filtro pasa-banda al que sólo se incorpora un
elemento resistivo R en paralelo al inductor como se indica en la Fig. 3.3. Este elemento hace
posible que a frecuencias por sobre la de sintonización las corrientes armónicas puedan circular por
el filtro a través del bypass resistivo. Si la elección de este elemento resulta en un alto valor óhmico,
se pierde la característica pasa-altos volviéndose similar al filtro pasa-banda.
Fig. 3.3 Modelo monofásico del filtro pasa-altos
De manera similar al filtro pasa-banda, para diseñar un filtro pasa-altos se debe contar con
los requerimientos de potencia reactiva y frecuencia de sintonización, a los que se agrega la
constante de diseño m para modificar la característica de impedancia. El cálculo de los parámetros
se muestra en las expresiones (3.4) a (3.6).
12
1 12
QC
f V (3.4)
2
12
1 12 t
VL
f h Q (3.5)
LR m
C (3.6)
La resistencia parásita del inductor se calcula de manera idéntica al filtro pasa-banda con la
expresión indicada en (3.3).
31
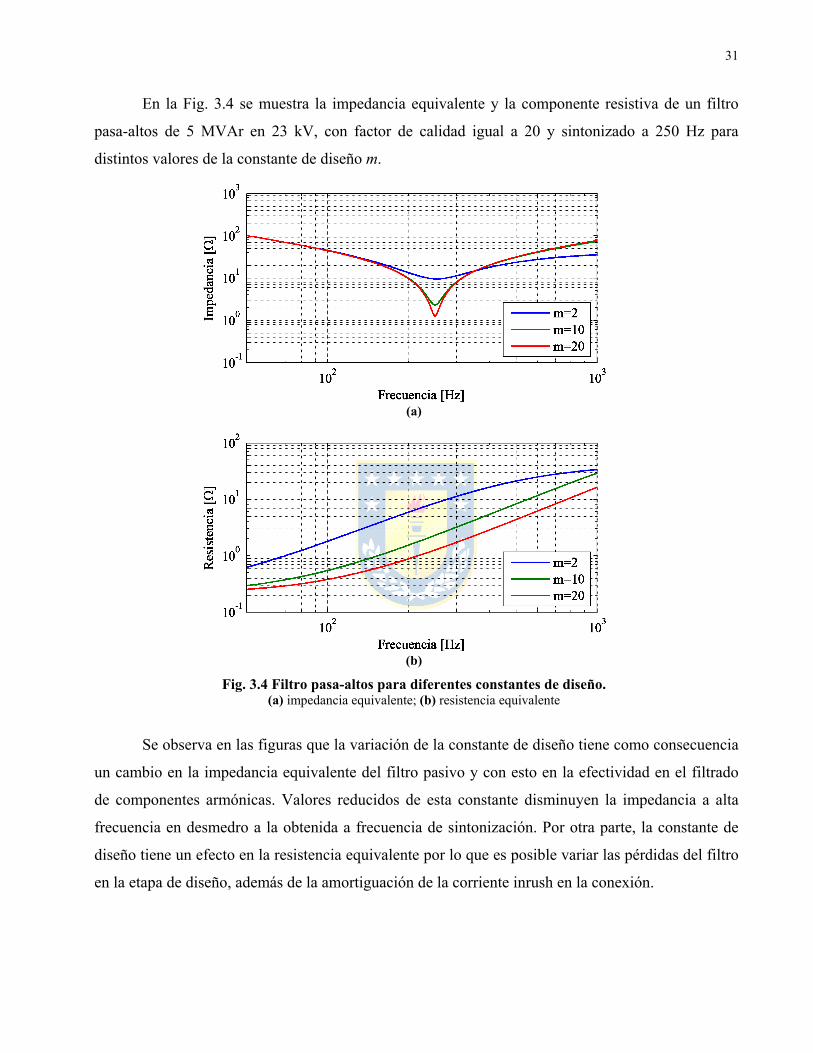
En la Fig. 3.4 se muestra la impedancia equivalente y la componente resistiva de un filtro
pasa-altos de 5 MVAr en 23 kV, con factor de calidad igual a 20 y sintonizado a 250 Hz para
distintos valores de la constante de diseño m.
(a)
(b)
Fig. 3.4 Filtro pasa-altos para diferentes constantes de diseño. (a) impedancia equivalente; (b) resistencia equivalente
Se observa en las figuras que la variación de la constante de diseño tiene como consecuencia
un cambio en la impedancia equivalente del filtro pasivo y con esto en la efectividad en el filtrado
de componentes armónicas. Valores reducidos de esta constante disminuyen la impedancia a alta
frecuencia en desmedro a la obtenida a frecuencia de sintonización. Por otra parte, la constante de
diseño tiene un efecto en la resistencia equivalente por lo que es posible variar las pérdidas del filtro
en la etapa de diseño, además de la amortiguación de la corriente inrush en la conexión.

32
3.4. Filtro tipo C
Producto del aporte de potencia reactiva de los filtros pasa-altos, la corriente a frecuencia
fundamental produce pérdidas en el elemento resistivo. El filtro tipo C es un filtro pasa-altos
modificado que presenta un condensador auxiliar Ca. Su característica más importante se debe a
rama LCa resonante a frecuencia fundamental lo que implica una reducción en las pérdidas de la
resistencia de amortiguamiento. Consecuentemente, las pérdidas aumentan en la componente
resistiva del inductor, ya que el flujo de corriente a frecuencia fundamental es mayor en la rama
resonante. Sin embargo, el desempeño global del filtro presenta menores pérdidas en comparación a
la topología pasa-altos. El modelo monofásico del filtro tipo C se indica en la Fig. 3.5.
Ca
Cm
LR
RL
Fig. 3.5 Modelo monofásico del filtro tipo C
El procedimiento con el que se obtienen las expresiones de cálculo de un filtro tipo C fue
presentado en [11]. En este trabajo se sigue un criterio de minimización de potencia reactiva de la
rama resonante a la frecuencia fundamental para optimizar el cálculo de los parámetros. El
procedimiento de cálculo se resume en las expresiones (3.7) a (3.9). El valor de la resistencia
amortiguadora, junto con la resistencia parásita del inductor se obtienen en forma análoga al filtro
pasa-altos.
12
1 12m
QC
f V (3.7)
2
12
1 1
( 1)
2t
a
h QC
f V
(3.8)

33
212
1 12 ( 1)t
VL
f h Q
(3.9)
Se muestra en la Fig. 3.6 las curvas de impedancia y resistencia versus frecuencia del filtro
tipo C con un diseño de idénticas características al filtro pasa-altos indicado en la Fig. 3.4.
(a)
(b)
Fig. 3.6 Filtro tipo C para diferentes constantes de diseño.
(a) impedancia equivalente; (b) resistencia equivalente
La impedancia equivalente del filtro tipo C resulta prácticamente idéntica a la observada en
el filtro pasa-altos. Se observan diferencias sólo en la resistencia equivalente a baja frecuencia
debido a la rama resonante a frecuencia fundamental. A esta frecuencia la componente resistiva del
filtro no es más que el valor equivalente del paralelo entre la resistencia parásita del inductor y en la
resistencia amortiguadora.
34
3.5. Pérdidas en filtros pasivos
Las pérdidas por efecto Joule en filtros pasivos son debidas a la circulación de corriente
fundamental y corrientes armónicas en los elementos resistivos. Es posible determinar las pérdidas
totales de un filtro trifásico PL usando la expresión (3.10).
2 23 3L R L RLP RI R I (3.10)
El inconveniente de determinar las pérdidas utilizando esta expresión es que debe conocerse
la corriente rms IR que circula por el elemento resistivo y la corriente rms IRL de la resistencia
parásita del reactor. Además, esta expresión no entrega información relevante para tomar decisiones
en la etapa diseño. Pese a esto, si se considera que estas pérdidas son debidas mayormente a la
corriente fundamental I1 que circula por el aporte de potencia reactiva, es posible aproximar el
cálculo de las pérdidas con la expresión (3.11). Esto es válido en aplicaciones con elevada
compensación de potencia reactiva utilizando esquemas de compensación múltiples etapas [12].
21 13LP R I (3.11)
Las pérdidas aproximadas dependen de la corriente fundamental y de la resistencia
equivalente a frecuencia fundamental R1. Esta resistencia está relacionada con las variables de
diseño del filtro. Esto es, la constante de diseño, el factor de calidad de reactores y la frecuencia de
sintonización. La potencia reactiva y el voltaje del sistema al cual se conecta el filtro pasivo se
consideran definidos.
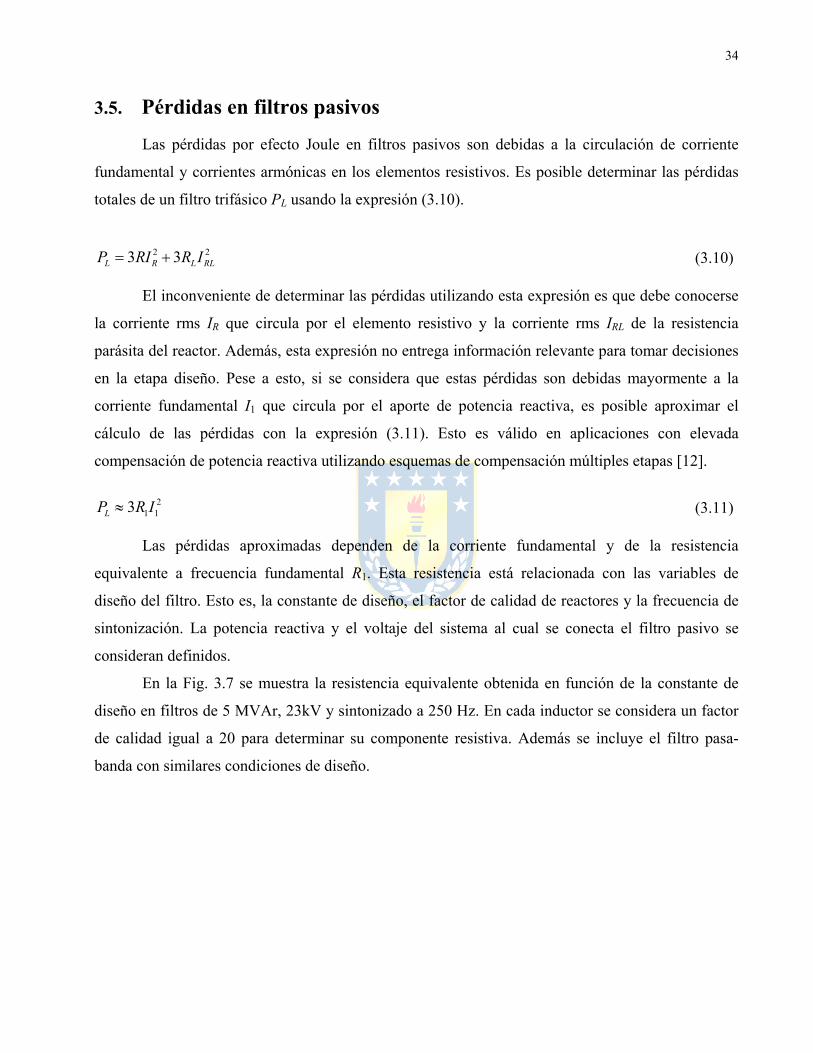
En la Fig. 3.7 se muestra la resistencia equivalente obtenida en función de la constante de
diseño en filtros de 5 MVAr, 23kV y sintonizado a 250 Hz. En cada inductor se considera un factor
de calidad igual a 20 para determinar su componente resistiva. Además se incluye el filtro pasa-
banda con similares condiciones de diseño.
35
Fig. 3.7 Resistencia a frecuencia fundamental versus constante de diseño en filtro tipo C.
En la figura se observa que la resistencia equivalente a frecuencia fundamental es
prácticamente idéntica en los filtros pasa-banda y tipo C. Este valor se ve mayormente afectado en el
filtro pasa-altos. Con estos resultados es posible concluir que la constante de diseño no tiene un
efecto importante en la resistencia a frecuencia fundamental para los filtros pasa-banda y tipo C,
teniéndose sólo un efecto notorio en filtros pasa-altos cuando la constante de diseño es menor a 15.
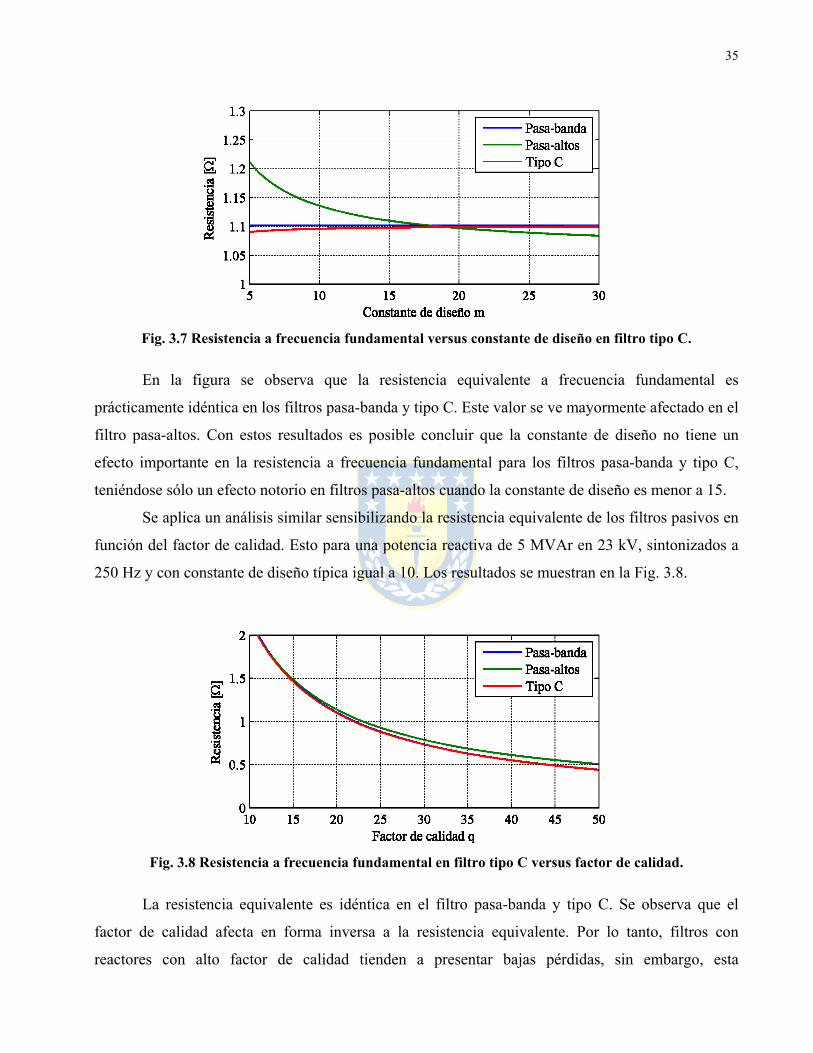
Se aplica un análisis similar sensibilizando la resistencia equivalente de los filtros pasivos en
función del factor de calidad. Esto para una potencia reactiva de 5 MVAr en 23 kV, sintonizados a
250 Hz y con constante de diseño típica igual a 10. Los resultados se muestran en la Fig. 3.8.
Fig. 3.8 Resistencia a frecuencia fundamental en filtro tipo C versus factor de calidad.
La resistencia equivalente es idéntica en el filtro pasa-banda y tipo C. Se observa que el
factor de calidad afecta en forma inversa a la resistencia equivalente. Por lo tanto, filtros con
reactores con alto factor de calidad tienden a presentar bajas pérdidas, sin embargo, esta

36
característica aumenta el costo del filtrodebido a que el calibre del conductor de las bobinas debe ser
mayor.
En la atenuación de componentes armónicas la selección de la frecuencia de sintonización es
decisiva, sin embargo, se analiza su efecto sobre las pérdidas debido a que esta frecuencia modifica
el valor del reactor y como consecuencia la resistencia parásita. En la Fig. 3.9 se muestra la
resistencia equivalente a frecuencia fundamental en función de la frecuencia de sintonización del
filtro pasivo. La potencia reactiva del filtro es 5 MVAr, conectado a 23 kV, constante de diseño
igual a 10 y factor de calidad del reactor igual a 20.
Fig. 3.9 Resistencia a frecuencia fundamental en filtro tipo C versus frecuencia de sintonización.
Al igual que en el caso anterior, la resistencia equivalente del filtro pasa-banda es
prácticamente idéntica a la del filtro tipo C. Además, en la figura se aprecia que la resistencia
equivalente a frecuencia fundamental aumenta significativamente a medida que se seleccionan bajas
frecuencias de sintonización en los filtros pasivos. Con este resultado es posible concluir que para
disminuir las pérdidas en los filtros con frecuencia de sintonización baja, se debe especificar
reactores con un factor de calidad elevado. Por esta razón es de esperar que los filtros a baja
frecuencia sean más caros en comparación a los sintonizados a frecuencias mayores para una misma
potencia reactiva. Esta comparación se aplica para cualquier nivel de voltaje, constante de diseño y
potencia reactiva especificada.
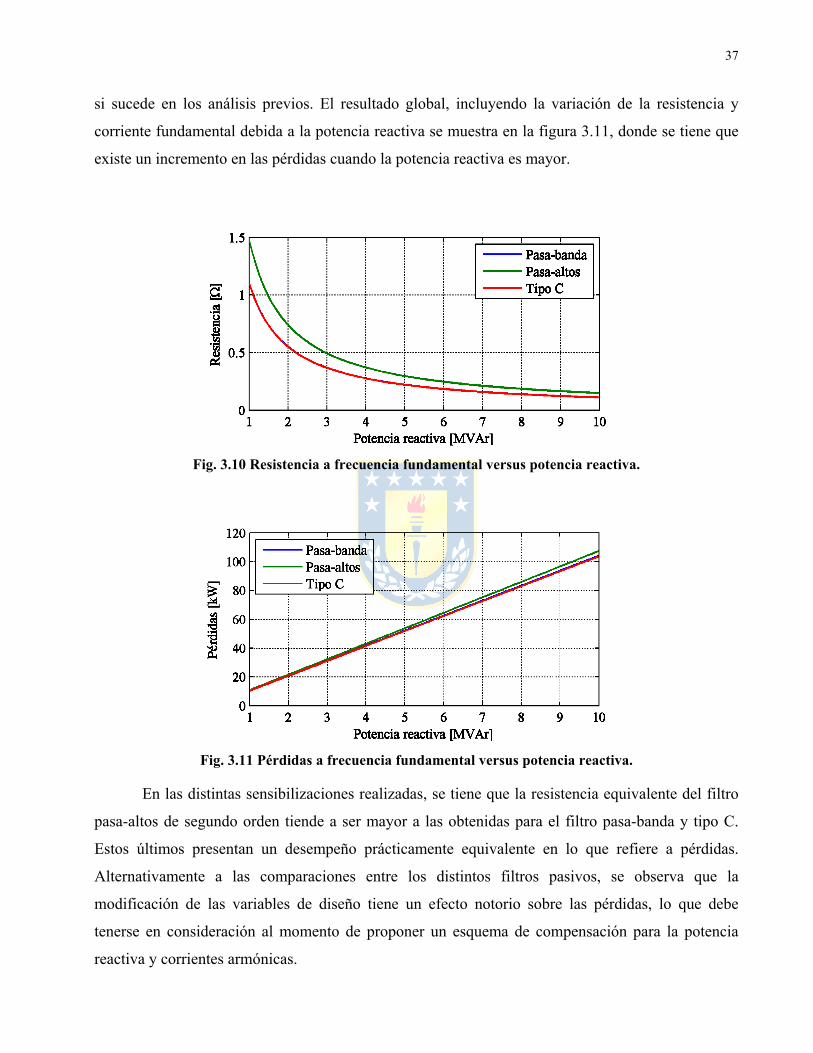
El efecto de sensibilizar la resistencia equivalente con la potencia reactiva de un filtro con
idénticas condiciones de diseño a lo discutido previamente produce los resultados mostrados en la
Fig. 3.10. Es importante destacar que la corriente fundamental aumenta con la potencia reactiva. Por
lo tanto, la reducción de la resistencia equivalente no implica una disminución en las pérdidas como
37
si sucede en los análisis previos. El resultado global, incluyendo la variación de la resistencia y
corriente fundamental debida a la potencia reactiva se muestra en la figura 3.11, donde se tiene que
existe un incremento en las pérdidas cuando la potencia reactiva es mayor.
Fig. 3.10 Resistencia a frecuencia fundamental versus potencia reactiva.
Fig. 3.11 Pérdidas a frecuencia fundamental versus potencia reactiva.
En las distintas sensibilizaciones realizadas, se tiene que la resistencia equivalente del filtro
pasa-altos de segundo orden tiende a ser mayor a las obtenidas para el filtro pasa-banda y tipo C.
Estos últimos presentan un desempeño prácticamente equivalente en lo que refiere a pérdidas.
Alternativamente a las comparaciones entre los distintos filtros pasivos, se observa que la
modificación de las variables de diseño tiene un efecto notorio sobre las pérdidas, lo que debe
tenerse en consideración al momento de proponer un esquema de compensación para la potencia
reactiva y corrientes armónicas.
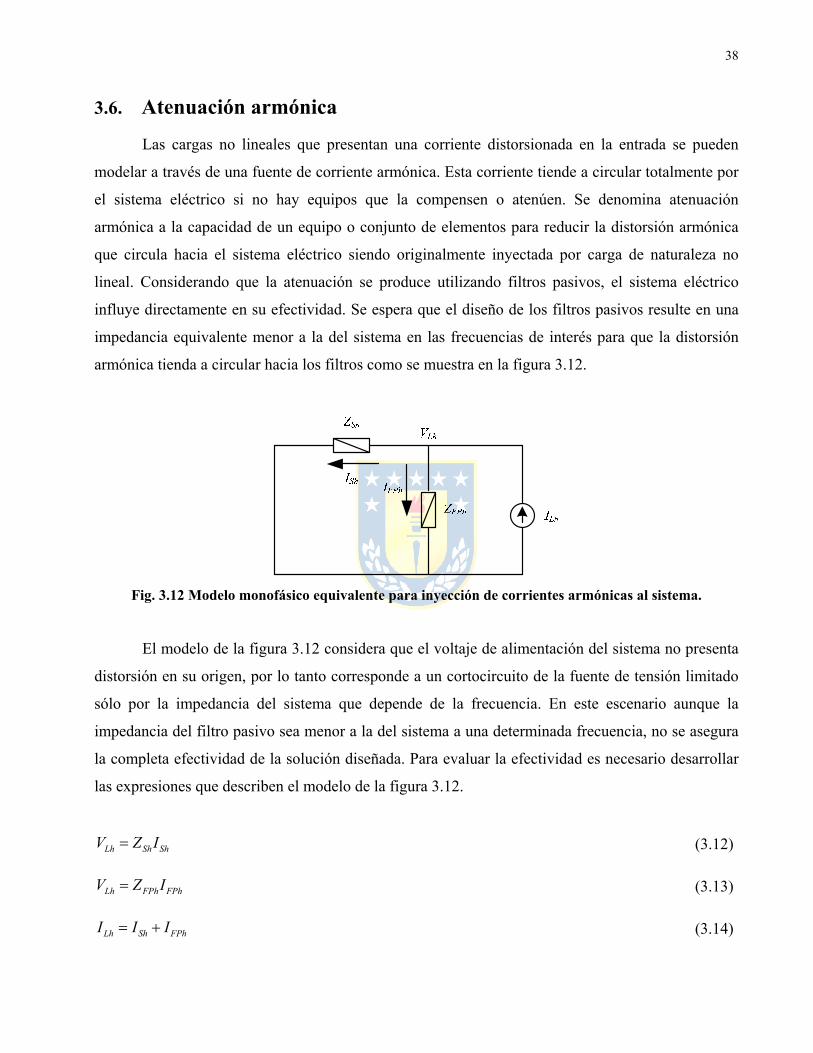
38
3.6. Atenuación armónica
Las cargas no lineales que presentan una corriente distorsionada en la entrada se pueden
modelar a través de una fuente de corriente armónica. Esta corriente tiende a circular totalmente por
el sistema eléctrico si no hay equipos que la compensen o atenúen. Se denomina atenuación
armónica a la capacidad de un equipo o conjunto de elementos para reducir la distorsión armónica
que circula hacia el sistema eléctrico siendo originalmente inyectada por carga de naturaleza no
lineal. Considerando que la atenuación se produce utilizando filtros pasivos, el sistema eléctrico
influye directamente en su efectividad. Se espera que el diseño de los filtros pasivos resulte en una
impedancia equivalente menor a la del sistema en las frecuencias de interés para que la distorsión
armónica tienda a circular hacia los filtros como se muestra en la figura 3.12.
Fig. 3.12 Modelo monofásico equivalente para inyección de corrientes armónicas al sistema.
El modelo de la figura 3.12 considera que el voltaje de alimentación del sistema no presenta
distorsión en su origen, por lo tanto corresponde a un cortocircuito de la fuente de tensión limitado
sólo por la impedancia del sistema que depende de la frecuencia. En este escenario aunque la
impedancia del filtro pasivo sea menor a la del sistema a una determinada frecuencia, no se asegura
la completa efectividad de la solución diseñada. Para evaluar la efectividad es necesario desarrollar
las expresiones que describen el modelo de la figura 3.12.
Lh Sh ShV Z I (3.12)
Lh FPh FPhV Z I (3.13)
Lh Sh FPhI I I (3.14)
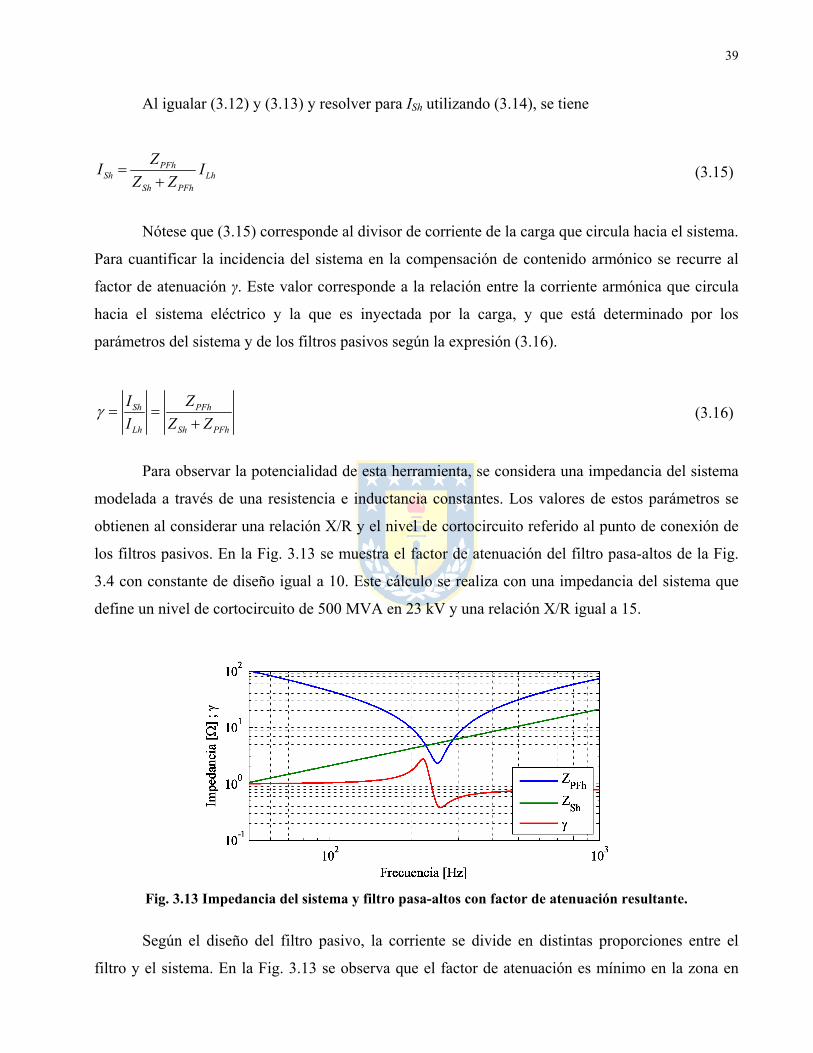
39
Al igualar (3.12) y (3.13) y resolver para ISh utilizando (3.14), se tiene
PFhSh Lh
Sh PFh
ZI I
Z Z
(3.15)
Nótese que (3.15) corresponde al divisor de corriente de la carga que circula hacia el sistema.
Para cuantificar la incidencia del sistema en la compensación de contenido armónico se recurre al
factor de atenuación γ. Este valor corresponde a la relación entre la corriente armónica que circula
hacia el sistema eléctrico y la que es inyectada por la carga, y que está determinado por los
parámetros del sistema y de los filtros pasivos según la expresión (3.16).
Sh PFh
Lh Sh PFh
I Z
I Z Z
(3.16)
Para observar la potencialidad de esta herramienta, se considera una impedancia del sistema
modelada a través de una resistencia e inductancia constantes. Los valores de estos parámetros se
obtienen al considerar una relación X/R y el nivel de cortocircuito referido al punto de conexión de
los filtros pasivos. En la Fig. 3.13 se muestra el factor de atenuación del filtro pasa-altos de la Fig.
3.4 con constante de diseño igual a 10. Este cálculo se realiza con una impedancia del sistema que
define un nivel de cortocircuito de 500 MVA en 23 kV y una relación X/R igual a 15.
Fig. 3.13 Impedancia del sistema y filtro pasa-altos con factor de atenuación resultante.
Según el diseño del filtro pasivo, la corriente se divide en distintas proporciones entre el
filtro y el sistema. En la Fig. 3.13 se observa que el factor de atenuación es mínimo en la zona en

40
que se sintoniza el filtro pasivo por la menor impedancia, sin embargo, ocurre un efecto indeseado
en frecuencias bajo la de sintonización. Este efecto es la resonancia paralela entre el filtro pasivo y
el sistema que puede producir la amplificación de contenido armónico en esa banda de frecuencias.
En las figuras 3.14 a 3.17 se muestra el factor de atenuación de un filtro tipo C en 23 kV
sensibilizado con respecto a la constante de diseño, potencia reactiva, factor de calidad y frecuencia
de sintonización. La impedancia equivalente del sistema es idéntica a la mostrada en la Fig. 3.13.
Fig. 3.14 Factor de atenuación de filtro tipo C para diferentes constantes de diseño.
Fig. 3.15 Factor de atenuación de filtro tipo C para diferentes niveles de potencia reactiva.

41
Fig. 3.16 Factor de atenuación de filtro tipo C para diferentes factores de calidad en reactor.
Fig. 3.17 Factor de atenuación de filtro tipo C para diferentes frecuencias de sintonización.
Se observa que la atenuación armónica del filtro pasivo se ve notoriamente afectada con el
valor de la constante de diseño, potencia reactiva y frecuencia de sintonización. La constante de
diseño modifica la efectividad del filtro pasivo alrededor de la frecuencia a la que es sintonizado,
mientras que la potencia reactiva afecta el factor de atenuación en todo el rango de frecuencia. Por
otra parte, debido a la característica inductiva del sistema eléctrico, la efectividad de un filtro pasivo
tiende a disminuir a medida que se reduce la frecuencia de sintonización bajo idénticas condiciones
de diseño. El factor de calidad muestra que tiene escasa incidencia en la atenuación armónica de la
topología tipo C. La tendencia de estos resultados se mantiene en filtros pasa-altos y pasa-banda en
distintos niveles de voltaje y características del sistema.

42
3.7. Distribución de potencia reactiva
Conocida la característica de carga de una planta industrial, se determina la potencia reactiva
total que debe ser compensada de manera de cumplir con la normativa vigente. Desde el punto de
vista de operación se demostró que la potencia reactiva que aporta un filtro pasivo tiene un efecto
importante sobre la efectividad en la atenuación armónica. Por lo tanto, obtenido el espectro
armónico de la corriente de carga y la potencia reactiva total a ser compensada, la distribución de
ésta se debe realizar con un factor de peso mayor en las bandas donde el contenido armónico sea
más marcado y también para filtros sintonizados a baja frecuencia según los resultados de las figuras
3.15 y 3.17. Además, en las zonas donde el contenido armónico sea escaso, normalmente a altas
frecuencias, la potencia reactiva del filtro pasivo basta que sea suficiente para asegurar una
efectividad adecuada.
3.8. Costos
Cuantificar el costo de filtros pasivos depende de factores y de información que los
fabricantes no publican, siendo además dependiente del desarrollo tecnológico. Es por esto que se
opta por indicar en forma cualitativa el efecto de modificar una variable de diseño sobre el costo de
un filtro pasivo. Estas variables son el factor de calidad, la constante de diseño, la frecuencia de
sintonización y la potencia reactiva, consideradas sobre un diseño con voltaje definido.
El aumento en el factor de calidad en reactores implica la reducción de la resistencia por lo
que debe utilizarse conductores de mayor sección con el consiguiente aumento de peso y volumen.
Esto hace que un mayor factor de calidad eleve el costo de fabricación y transporte del reactor.
En el caso de la constante de diseño, su modificación no trae mayores consecuencias sobre el
costo de un filtro pasivo. Si bien modifica el valor de la resistencia de amortiguamiento, un mayor
valor resistivo no implica un cambio importante en el tamaño físico, ya que su fabricación se realiza
con materiales de distinta característica resistiva. Por lo demás, el rango de los valores típicos
utilizados en el diseño no hace que se alcance una variación importante en la corriente que circula a
través de esta resistencia y por consiguiente en su especificación.
Los reactores son parte de la rama de sintonización de un filtro pasivo. Se observa de las
expresiones de diseño que el valor de inductancia de un reactor es inversamente proporcional a la
frecuencia de sintonización. Por lo tanto, un aumento en la frecuencia de sintonización implica una
disminución en el costo del reactor, ya que se reduce el número de espiras y por ende el material y

43
su volumen.
Sin duda el costo de los capacitores en cualquier aplicación representa un porcentaje
significativo. En filtros pasivos el valor de los capacitores está definido por la potencia reactiva que
deben aportar. Un filtro con elevada potencia reactiva es más costoso que un filtro con un aporte
reducido. Sin embargo, no hay mayor incidencia si se considera el conjunto de filtros pasivos,
puesto que la potencia reactiva está determinada por la carga, la que se debe distribuir entre los
filtros sintonizados a distintas frecuencias. En definitiva, una mayor potencia reactiva trae consigo
un aumento del costo del filtro pasivo si se analiza en forma particular, por lo que modificaciones de
la distribución de esta potencia entre distintos filtros no implica una variación importante en el costo
final.
Existen otras decisiones que pueden reducir el costo de un esquema de filtros pasivos. Éstas
se relacionan con igualar los valores de los componentes resistivos y capacitivos de las diferentes
ramas. Por ejemplo, conformar bancos de condensadores con unidades estándar conectadas en
paralelo e igualar las resistencias de amortiguamiento desde el punto de vista resistivo como en las
especificaciones de los elementos. De esta manera es posible reducir el número de elementos spare
o de repuesto que debe contar la planta en caso que alguna unidad sufra daño. Si se tienen elementos
muy diversos, el número de elementos spare crece y junto con ello el costo.
3.9. Recomendaciones de diseño
El diseño de filtros pasivos es un proceso iterativo. La selección de topologías, número de
filtros, frecuencias de sintonización, potencia reactiva y otras variables de diseño se realiza en base a
la experiencia para obtener distorsiones de corriente y voltaje dentro de los límites recomendados
por ejemplo en el IEEE Std. 519-1992. Afortunadamente, la sensibilización realizada para estimar
pérdidas y atenuación armónica entrega las bases para definir un resumen del efecto de cada variable
de diseño sobre las características que debe cumplir un conjunto de filtros pasivos. Las
características de interés son las pérdidas, la efectividad y costo, los que se resumen en la Tabla 3.1.

44
Tabla 3.1 Efecto de la Modificación de Variables de Diseño en Filtros Pasivos.
Incremento en el parámetro de diseño
Efecto
Pérdidas Atenuación armónica
Costo
Factor de calidad q Disminución Incremento Incremento
Constante de diseño m Leve
disminución Incremento (*)
Escasa relación
Frecuencia de sintonización ft Disminución Incremento
(**) Disminución
Potencia reactiva Q1 Incremento Elevando
incremento Incremento
(*) Se incrementa en zonas próximas a la frecuencia de sintonización. Decrece en altas frecuencia. (**) Este incremento resulta de suponer que la impedancia del sistema aumenta a mayor frecuencia.
Asumiendo que el diseño de filtros pasivos se realiza en la etapa de construcción de una
planta industrial y la norma a aplicar corresponde al IEEE Std. 519-1992, debe estar en antecedente
lo siguiente:
Modelo del sistema de alimentación en el punto conexión de los filtros pasivos: Modelo a
partir del nivel de cortocircuito y relación X/R, o en su efecto, parámetros R y X en función
de la frecuencia para un análisis más próximo a las condiciones reales. Se recomienda
evaluar futuros cambios topológicos en la alimentación en caso que los hubiere.
Potencia reactiva: Estimada según las condiciones de operación de la planta en el punto de
común acoplamiento.
Distorsión armónica inyectada: Esta distorsión debe estar disponible en el punto donde serán
conectados los filtros pasivos. La distorsión total de cada componente se obtiene
considerando que se encuentran en fase.
Potencia de demanda máxima: Esta potencia es utilizada para determinar los porcentajes de
la distorsión armónica con respecto a la corriente de demanda máxima. Estos valores son
utilizados para corroborar si se cumple con los límites definidos en la respectiva norma.
Nivel de cortocircuito en el punto de común acoplamiento.
Porcentaje de pérdidas aceptadas en los filtros pasivos con respecto a la potencia reactiva
total.
Información adicional: Parámetros de transformadores principales, líneas de transmisión y
otros elementos de interés conectados entre los filtros pasivos y el punto de común
acoplamiento si aplica.

45
Considerando las recomendaciones de diseño, se seleccionan los valores de las variables de
diseño utilizando el factor de atenuación. Los límites definidos por la norma técnica y la distorsión
inyectada por la carga no lineal se utilizan para determinar la atenuación de cada componente
armónica sirviendo como referencia para el resultado que se desea alcanzar con el diseño.
3.10. Ejemplo de aplicación
En la Fig. 3.18 se muestra el diagrama unilineal simplificado de una planta de molienda
típica destacando la presencia de un molino SAG y dos molinos bolas. La planta además presenta
cargas no lineales de 6 y 12 pulsos con potencias equivalentes de 1.5 MW y 35.0 MW
respectivamente. A esto se suma 25 MW en carga pasiva. En condición de operación nominal la
planta requiere de 72 MVAr, la que se ha dividido en tres grupos de filtros pasivos idénticos de 24
MVAr asociados a la operación de cada molino.
220 kV / 50 Hz 5370 MVA SC
220/23 kV60 MVA 9%
Otras cargas
Filtros Armónicos24 MVAr
Otras cargas
Filtros Armónicos24 MVAr
Molino SAG30 kHP
Molino Bola25 kHP
Otras cargas
Filtros Armónicos24 MVAr
Molino Bola25 kHP
220/23 kV60 MVA 9%
220/23 kV60 MVA 9%
1x220 kVFlint
102 km
NCNC
Fig. 3.18 Diagrama unilineal de planta de molienda.
La distorsión armónica en corriente de esta planta de molienda se muestra en la Fig. 3.19
considerando carga no lineal típica de 6 y 12 pulsos y la operación nominal de los cicloconversores
que accionan los molinos.

46
Fig. 3.19 Espectro armónico de la corriente de línea en planta de molienda referida a 23 kV.
Los filtros se diseñan en base a la información entregada por la Tabla 3.1 junto con las
siguientes consideraciones:
Topologías de filtros pasivos con amortiguamiento.
Filtros tipo C sintonizados a baja frecuencia.
Filtros pasa-altos sintonizados a mayor frecuencia.
Mayor amortiguamiento en filtro pasa-alto sintonizado a mayor frecuencia.
Mayor potencia reactiva en filtros sintonizados a menor frecuencia para mejorar efectividad.
Factores de calidad en reactores decrecientes con respecto a la frecuencia.
Por otra parte, en la Tabla 3.2 se muestran las características principales de los filtros pasivos
que requieren ser conectados para lograr la compensación de potencia reactiva y corrientes
armónicas de la planta de molienda.
Tabla 3.2 Características de Filtros Pasivos en Planta de Molienda.
ID Topología Frecuencia de
sintonización [Hz] Potencia reactiva nominal [MVAr]
Resistencia de amortiguamiento [Ω]
Factor de calidad q
PF-02 Tipo C 100 6.0 400 35 PF-03 Tipo C 150 4.0 400 30 PF-04 Pasa-altos 200 2.0 400 25 PF-05 Pasa-altos 250 2.0 400 20 PF-07 Pasa-altos 350 2.0 400 17 PF-11 Pasa-altos 550 4.0 100 15 PF-17 Pasa-altos 850 2.0 100 12 PF-36 Pasa-altos 1800 2.0 100 8

47
Las pérdidas de este esquema se resumen en la Tabla 3.3, las que en total corresponden a
0.6% con respecto a la potencia reactiva del grupo de filtros pasivos.
Tabla 3.3 Pérdidas de Filtros Pasivos en Planta de Molienda.
ID Topología Pérdidas [kW] PF-02 Tipo C 61.0 PF-03 Tipo C 36.4 PF-04 Pasa-altos 20.0 PF-05 Pasa-altos 11.9 PF-07 Pasa-altos 5.8 PF-11 Pasa-altos 7.8 PF-17 Pasa-altos 2.4 PF-36 Pasa-altos 1.2
La impedancia equivalente del conjunto de filtros pasivos y del sistema visto desde 23 kV se
indica en la Fig. 3.20 para frecuencias entre 50 y 2500 Hz. El sistema se modela a partir de
parámetros en función de la frecuencia utilizando software con la base de datos del sistema eléctrico
interconectado.
Fig. 3.20 Impedancia del sistema y equivalente de los tres grupos de filtros pasivos.
Para estimar el efecto de los filtros pasivos en la atenuación y/o amplificación de contenido
armónico, en la Fig. 3.21 se muestra el factor de atenuación producto de la interacción de los filtros
pasivos y el sistema. Como es de esperar, existe filtrado de corrientes armónicas en las frecuencias
de sintonización de los filtros pasivos, pero a la vez hay intervalos de frecuencia en que el factor de
atenuación es mayor a la unidad, es decir, puede presentarse una amplificación de componentes
armónicas. Este efecto es más marcado a baja frecuencia.

48
Fig. 3.21 Factor de atenuación de los filtros pasivos.
El espectro de la corriente del sistema se muestra en la Fig. 3.22. Se observa que las
componentes de alta frecuencia son efectivamente atenuadas, sin embargo, a baja frecuencia existen
corrientes armónicas que prácticamente no sufren variación.
Fig. 3.22 Espectro armónico de la corriente de línea del sistema referida a 23 kV.
Los límites de componentes armónicas de corriente presentes en el IEEE Std. 519-1992 se
definen según el nivel de tensión, nivel de cortocircuito y demanda máxima en el punto de común
acoplamiento. Para este ejemplo los valores indicados corresponden a 220 kV, 5370 MVA y 150
MVA respectivamente. Los límites y valores de distorsión obtenidos se muestran en la Tabla 3.4.
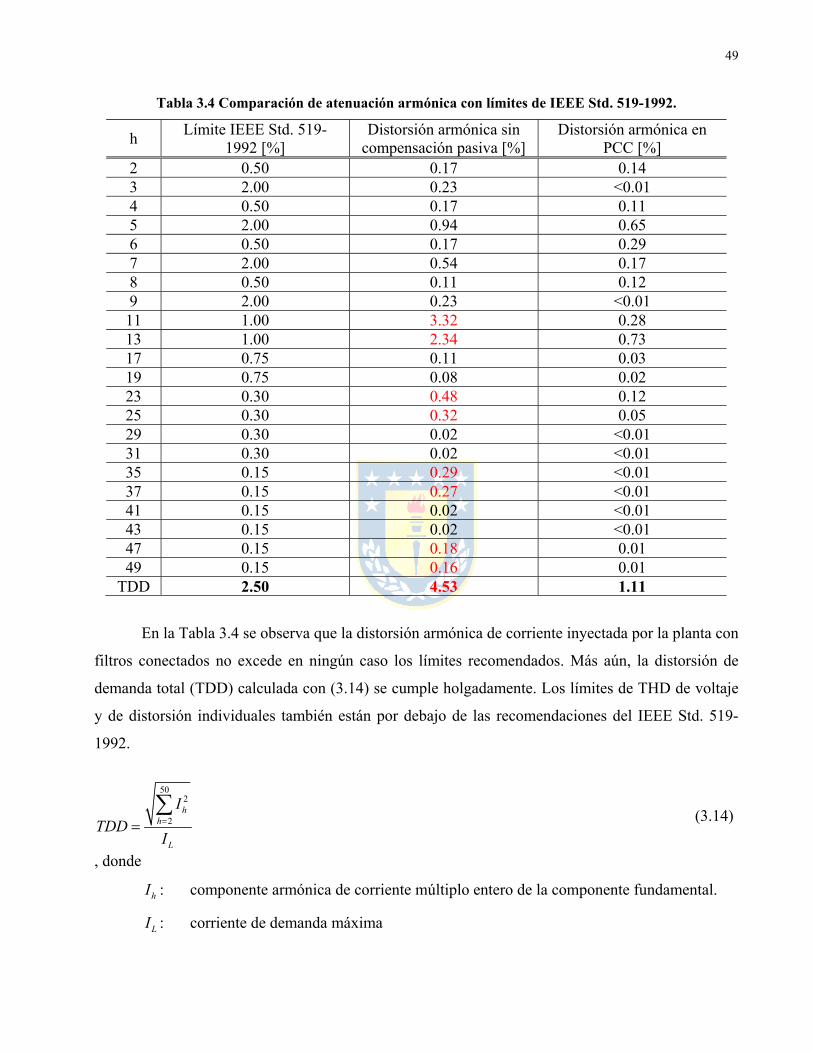
49
Tabla 3.4 Comparación de atenuación armónica con límites de IEEE Std. 519-1992.
h Límite IEEE Std. 519-
1992 [%] Distorsión armónica sin
compensación pasiva [%] Distorsión armónica en
PCC [%] 2 0.50 0.17 0.14 3 2.00 0.23 <0.01 4 0.50 0.17 0.11 5 2.00 0.94 0.65 6 0.50 0.17 0.29 7 2.00 0.54 0.17 8 0.50 0.11 0.12 9 2.00 0.23 <0.01 11 1.00 3.32 0.28 13 1.00 2.34 0.73 17 0.75 0.11 0.03 19 0.75 0.08 0.02 23 0.30 0.48 0.12 25 0.30 0.32 0.05 29 0.30 0.02 <0.01 31 0.30 0.02 <0.01 35 0.15 0.29 <0.01 37 0.15 0.27 <0.01 41 0.15 0.02 <0.01 43 0.15 0.02 <0.01 47 0.15 0.18 0.01 49 0.15 0.16 0.01
TDD 2.50 4.53 1.11
En la Tabla 3.4 se observa que la distorsión armónica de corriente inyectada por la planta con
filtros conectados no excede en ningún caso los límites recomendados. Más aún, la distorsión de
demanda total (TDD) calculada con (3.14) se cumple holgadamente. Los límites de THD de voltaje
y de distorsión individuales también están por debajo de las recomendaciones del IEEE Std. 519-
1992.
50
2
2h
h
L
I
TDDI
(3.14)
, donde
hI : componente armónica de corriente múltiplo entero de la componente fundamental.
LI : corriente de demanda máxima

50
Pese a que la operación de la planta en condiciones nominales cumple con la distorsión
armónica individual y total recomendada, una de las críticas sobre el IEEE Std. 519-1992 es que no
recomienda límites para la distorsión armónica de componentes que son múltiplo no-entero de la
componente fundamental. Estas componentes son las denominadas inter y sub-armónicas. En la Fig.
3.21 es posible observar que existen componentes armónicas de baja frecuencia que no son
atenuadas por los filtros pasivos. Por otra parte, la compensación con esta solución de filtros pasivos
introduce entre 50 y 100 Hz el efecto indeseado de amplificación de contenido armónico, lo que se
intentó minimizar con el diseño propuesto. Esta característica se muestra en la Fig. 3.23.
Fig. 3.23 Factor de atenuación de los filtros pasivos entre 60 y 100 Hz.
Es importante destacar que la amplificación armónica a baja frecuencia no tiene mayor
incidencia en aplicaciones con carga no-lineal típica de 6 y 12 pulsos. Sin embargo, la presencia de
cicloconversores implica la inyección de contenido armónico de baja frecuencia como se discutió en
el Capítulo 2. En el ejemplo mostrado, la inter-armónica f1+6fo del molino SAG tuvo una
amplificación de 2.01 veces. La componente inyectada por los molinos Bolas fue amplificada 1.68
veces.
3.11. Discusión y Conclusiones
A menos que exista un cambio tecnológico importante, el futuro de estructuras de
convertidores estáticos basadas en tiristores se prevé en aumento debido a que las aplicaciones cada
vez crecen en tamaño y demanda de energía. Estas estructuras requieren un método de
compensación debido a la interacción de estas cargas con el sistema eléctrico. Los filtros pasivos
51
corresponden a la primera solución tradicionalmente considerada, por lo tanto, debe tenerse especial
cuidado durante el proceso de diseño para lograr una solución efectiva, eficiente, de menor costo
posible y confiable incluso frente a ampliaciones futuras. Es importante destacar que los
procedimientos de diseño observados en la literatura tienen como objetivo principal el cumplimiento
de los límites de distorsión. A la fecha, no existe una metodología que permita reducir las
iteraciones que permitan obtener un diseño adecuado. Lo expuesto en este trabajo permite tomar
decisiones para considerar la efectividad armónica, reducir pérdidas y eventualmente el costo de un
esquema de compensación pasivo.

52
Capítulo 4. Filtro Híbrido Paralelo
4.1. Introducción
El filtro híbrido paralelo es una topología compuesta por un filtro activo conectado en serie a
un filtro pasivo como se muestra en la figura 4.1. Se define paralelo debido a que se conecta en
paralelo a las cargas que requieren ser compensadas. Esta topología se ha estudiado para mejorar la
efectividad de la compensación de filtros pasivos que se ve afectada por variación de parámetros,
diseño deficiente u operación en sistemas robustos [15]. La principal ventaja de esta topología es
que el voltaje en terminales de la etapa activa puede ser menor a la tensión de la red reduciendo así
el estrés en semiconductores. Esta ventaja se puede lograr con una mayor caída de tensión
fundamental en la etapa pasiva, además de la conexión de transformadores de acoplamiento. En este
capítulo se muestra su principio de operación, la influencia de la etapa pasiva y el potencial para
compensar componentes de baja frecuencia.
Fig. 4.1 Topología de filtro híbrido paralelo.
4.2. Principio de Operación
En la figura 4.1 se muestra la topología del filtro híbrido paralelo conectado a una red
trifásica indicando las variables de interés en la operación. Destacan los transformadores de
acoplamiento que eventualmente pueden ser utilizados para reducir el estrés en los semiconductores

53
de la etapa activa. El principio de operación de este equipo se divide en la compensación de potencia
reactiva y compensación de corrientes armónicas.
4.2.1 Compensación de potencia reactiva
Los filtros pasivos presentan una impedancia capacitiva a frecuencias bajo la frecuencia de
sintonización que define la potencia reactiva QCo. Esta característica puede ser utilizada por la etapa
activa para modificar la potencia reactiva del filtro pasivo y como consecuencia lograr una potencia
reactiva variable del filtro híbrido. Para analizar la característica de compensación de potencia
reactiva del filtro híbrido, en la Fig. 4.2 se presenta el modelo monofásico a frecuencia fundamental
en el que se han despreciado las pérdidas de la etapa pasiva por lo que el filtro se compone sólo por
la capacitancia equivalente CF. A partir de esta capacitancia es posible obtener la reactancia de la
etapa pasiva XCF que junto a la tensión en el punto de conexión VL1 definen la potencia reactiva
original del filtro pasivo Qco. El voltaje fundamental de la etapa activa VA1 se define
convenientemente con respecto a VL1 según se indica en la expresión (4.1). El factor β corresponde a
una ganancia real que a la vez indica la tensión de la etapa activa en por unidad del voltaje del
sistema. A partir del voltaje considerado en la etapa activa, se desarrollan las expresiones para la
tensión VF1 (4.2) y la corriente IF1 (4.3) en el filtro pasivo.
Fig. 4.2 Modelo monofásico equivalente para compensación de potencia reactiva de filtro híbrido.
1 1A LV V (4.1)
1 1 1 1(1 )F L A LV V V V (4.2)
1 11
(1 )F LF
CF CF
V VI
jX jX
(4.3)
Conocida la corriente que circula por el filtro pasivo, que es igual a la etapa activa, es posible

54
determinar la potencia reactiva de la etapa pasiva QEP, etapa activa QEA y total QT a partir de las
expresiones (4.4), (4.5) y (4.6) respectivamente.
2
* 2 211 1
33 (1 ) (1 )L
EP F F CoCF
VQ im V I Q
X (4.4)
2
* 211 1
33 (1 ) ( )L
EA A F CoCF
VQ im V I Q
X (4.5)
2
* 11 1
33 (1 ) (1 )L
T EP AE L F CoCF
VQ Q Q im V I Q
X (4.6)
Estas expresiones indican que la potencia reactiva original de los filtros pasivos puede ser
modificada variando la ganancia β. Es importante notar que siendo β una ganancia real, el filtro
activo genera un voltaje en fase o contrafase al voltaje en terminales lo que idealmente provoca que
la corriente que circula por el filtro híbrido esté en cuadratura, así el filtro híbrido compensa
potencia reactiva sin absorber o generar potencia activa. De (4.1) y (4.6) se deduce que si β es igual
a cero equivale a no tener el filtro activo en operación por lo que QT es igual a QCo. Si se utiliza β
mayor que cero entonces el voltaje en el capacitor equivalente es menor al nominal y la potencia
reactiva disminuye, mientras que si β toma valores menores que cero, la tensión producida por el
filtro activo está en contrafase con el voltaje del sistema aumentando el voltaje en el condensador y
finalmente provocando un flujo de potencia reactiva mayor al nominal. Esto también se evidencia al
obtener las relaciones entre la potencia reactiva de la etapa pasiva y etapa activa con respecto a la
potencia reactiva total del filtro híbrido como se muestra en las expresiones (4.7) y (4.8)
respectivamente.
1EP
T
Q
Q (4.7)
EA
T
Q
Q (4.8)
Con el objetivo de identificar de mejor manera la característica de potencia reactiva de cada
etapa, en la Fig. 4.3 se muestra la potencia reactiva en el filtro pasivo, filtro activo y total con
respecto a β. Estos valores son calculados en por unidad basados en la potencia original del filtro
pasivo Qco.

55
Fig. 4.3 Potencia reactiva equivalente del filtro pasivo, filtro activo y total versus β.
Se observa que con β negativo se obtiene un aumento de la potencia reactiva inyectada con
respecto a la original del filtro pasivo, sin embargo, la potencia reactiva del filtro activo se
contrapone a la del filtro pasivo. Por lo tanto, para que exista un aumento del flujo de potencia
reactiva del filtro híbrido, se debe aumentar la especificación de potencia reactiva del filtro pasivo
debido a la conexión serie de estas etapas. Por otra parte, la reducción de la potencia reactiva
inyectada con β positivo es recomendada sólo hasta la especificación nominal de los condensadores
del filtro pasivo, lo que ocurre con β igual a 2. Esto, por otra parte, implica una especificación de
potencia de la etapa activa igual a 2 veces Qco.
Este análisis muestra que la compensación de potencia reactiva con la topología híbrida
paralela puede ser considerada una alternativa de operación. Esto idealmente dentro del rango de β
entre 0 y 1 debido a la especificación de potencia necesaria en las etapas pasiva y activa con
respecto a la potencia reactiva total que es posible obtener. Fuera de este rango se sobrepasa la
corriente fundamental nominal del filtro pasivo o bien se impone un mayor requerimiento para la
tensión en terminales de la etapa activa. Esto permite concluir que la conexión serie de la etapa
pasiva con la activa implica que la potencia instalada de ambos elementos sea mayor a la potencia
reactiva total que se puede compensar lo que hace de esta topología una desventaja importante.
4.2.2 Compensación de corrientes armónicas
El filtro híbrido tiene la capacidad de modificar la compensación propia del filtro pasivo a
través de la generación de un voltaje a las frecuencias armónicas de interés. En la Fig. 4.4 se muestra
el modelo monofásico equivalente para la compensación de corrientes armónicas.
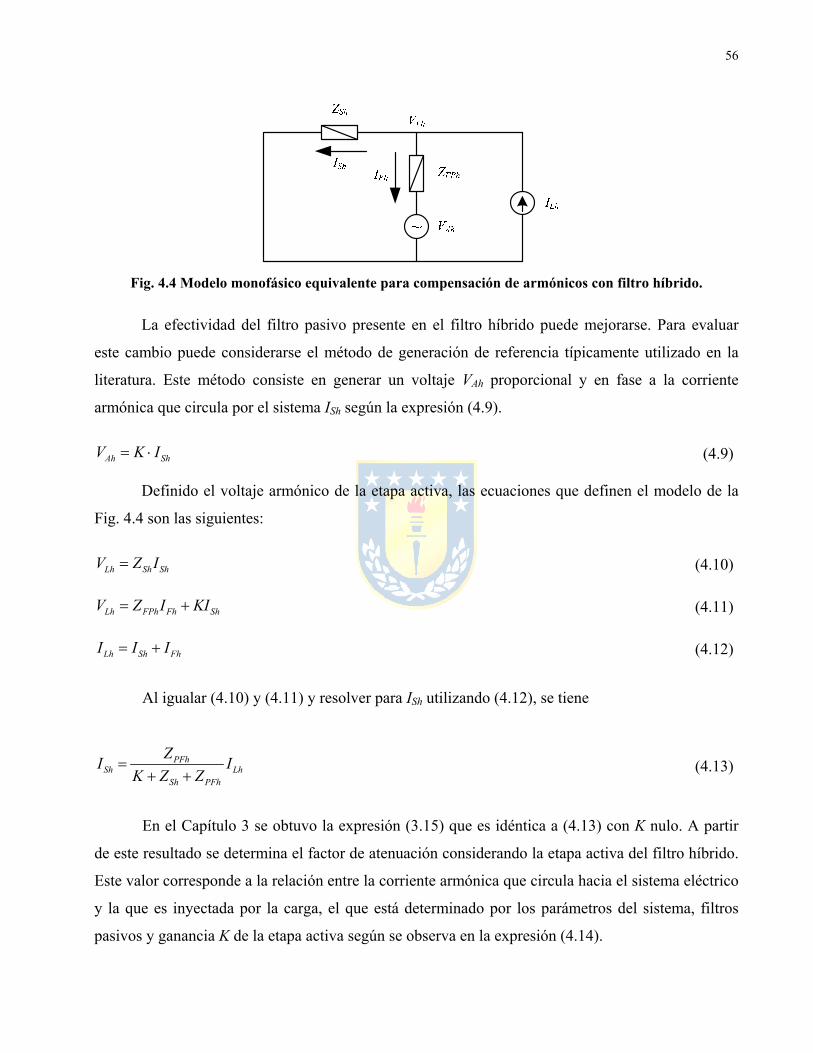
56
Fig. 4.4 Modelo monofásico equivalente para compensación de armónicos con filtro híbrido.
La efectividad del filtro pasivo presente en el filtro híbrido puede mejorarse. Para evaluar
este cambio puede considerarse el método de generación de referencia típicamente utilizado en la
literatura. Este método consiste en generar un voltaje VAh proporcional y en fase a la corriente
armónica que circula por el sistema ISh según la expresión (4.9).
Ah ShV K I (4.9)
Definido el voltaje armónico de la etapa activa, las ecuaciones que definen el modelo de la
Fig. 4.4 son las siguientes:
Lh Sh ShV Z I (4.10)
Lh FPh Fh ShV Z I KI (4.11)
Lh Sh FhI I I (4.12)
Al igualar (4.10) y (4.11) y resolver para ISh utilizando (4.12), se tiene
PFhSh Lh
Sh PFh
ZI I
K Z Z
(4.13)
En el Capítulo 3 se obtuvo la expresión (3.15) que es idéntica a (4.13) con K nulo. A partir
de este resultado se determina el factor de atenuación considerando la etapa activa del filtro híbrido.
Este valor corresponde a la relación entre la corriente armónica que circula hacia el sistema eléctrico
y la que es inyectada por la carga, el que está determinado por los parámetros del sistema, filtros
pasivos y ganancia K de la etapa activa según se observa en la expresión (4.14).
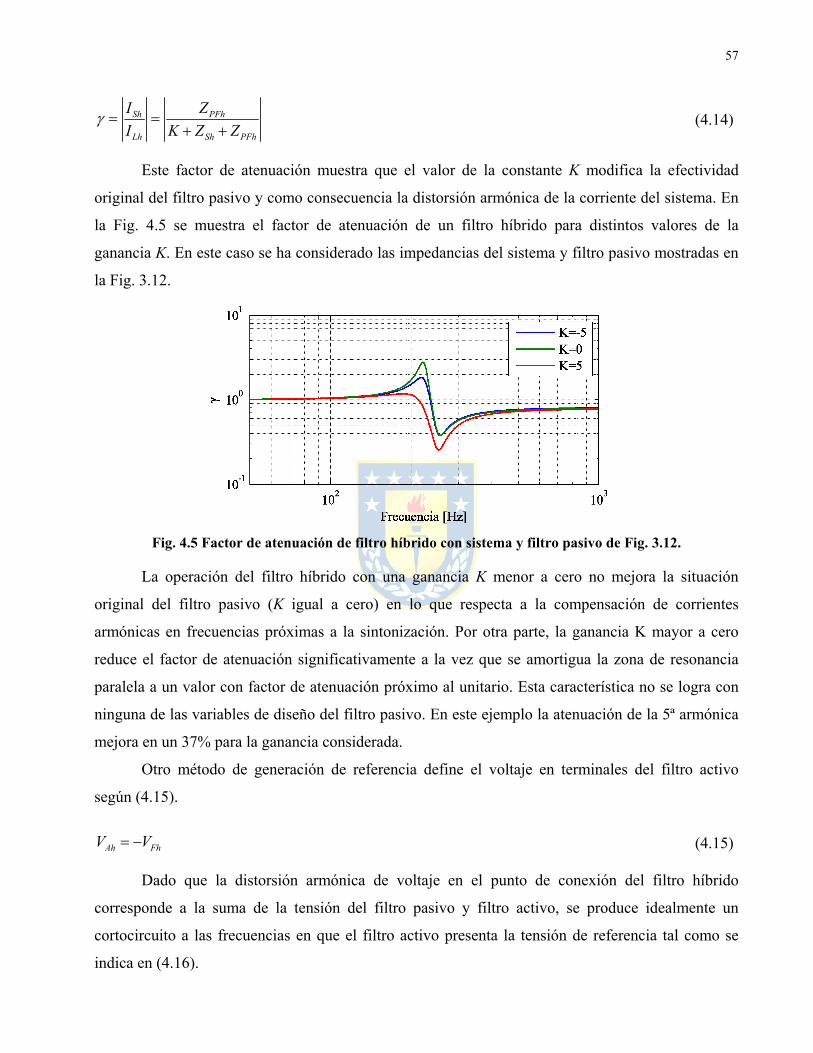
57
Sh PFh
Lh Sh PFh
I Z
I K Z Z
(4.14)
Este factor de atenuación muestra que el valor de la constante K modifica la efectividad
original del filtro pasivo y como consecuencia la distorsión armónica de la corriente del sistema. En
la Fig. 4.5 se muestra el factor de atenuación de un filtro híbrido para distintos valores de la
ganancia K. En este caso se ha considerado las impedancias del sistema y filtro pasivo mostradas en
la Fig. 3.12.
Fig. 4.5 Factor de atenuación de filtro híbrido con sistema y filtro pasivo de Fig. 3.12.
La operación del filtro híbrido con una ganancia K menor a cero no mejora la situación
original del filtro pasivo (K igual a cero) en lo que respecta a la compensación de corrientes
armónicas en frecuencias próximas a la sintonización. Por otra parte, la ganancia K mayor a cero
reduce el factor de atenuación significativamente a la vez que se amortigua la zona de resonancia
paralela a un valor con factor de atenuación próximo al unitario. Esta característica no se logra con
ninguna de las variables de diseño del filtro pasivo. En este ejemplo la atenuación de la 5ª armónica
mejora en un 37% para la ganancia considerada.
Otro método de generación de referencia define el voltaje en terminales del filtro activo
según (4.15).
Ah FhV V (4.15)
Dado que la distorsión armónica de voltaje en el punto de conexión del filtro híbrido
corresponde a la suma de la tensión del filtro pasivo y filtro activo, se produce idealmente un
cortocircuito a las frecuencias en que el filtro activo presenta la tensión de referencia tal como se
indica en (4.16).

58
0Lh Fh AhV V V (4.16)
Por otra parte, en (4.10) se indica la relación entre el voltaje armónico de la carga y la
corriente armónica inyectada al sistema. Por lo tanto, el cortocircuito producido por el filtro híbrido
a las frecuencias armónicas que se compensa hace que la corriente armónica inyectada al sistema sea
nula en condiciones ideales.
4.3. Influencia del Filtro Pasivo en el Etapa Activa
En el Capítulo 2 se mostró las distintas variables de diseño presentes en las topologías de
filtros pasivos. Estas variables se pueden resumir en la potencia reactiva y en la rama de
sintonización, las que tienen una influencia en la operación y requerimientos de potencia de la etapa
activa del filtro híbrido. La potencia de la etapa activa se puede expresar a través de las tensiones y
corrientes rms. Considerando una operación balanceada de las tres piernas del convertidor, la
potencia se puede expresar como
_ _3A A rms A rmsS V I (4.17)
La tensión y corriente rms se pueden determinar a partir de las componentes efectivas a
frecuencia fundamental y a las frecuencias armónicas según las expresiones (4.18) y (4.19)
respectivamente. Por lo tanto, el análisis de la influencia del filtro pasivo en la etapa activa se basa
en determinar las tensiones y corrientes necesarias para la operación del convertidor en función de la
potencia reactiva y frecuencia de sintonización de la etapa pasiva.
2 2
_ 12
n
A rms A Ahh
V V V
(4.18)
2 2
_ 12
n
A rms A Ahh
I I I
(4.19)
4.3.1 Potencia reactiva del filtro pasivo
En el supuesto que el filtro híbrido se utiliza sólo para la compensación de potencia reactiva,
es de esperar que la potencia aparente del filtro activo sea menor en comparación a la del filtro
59
pasivo conectado en serie. Pese a esto, en la Fig. 4.3 se observa que la variación de potencia reactiva
total conseguida supone una variación importante en la potencia nominal de ambos filtros. Por lo
tanto, la utilización del filtro híbrido para compensar potencia reactiva no es una opción
económicamente viable para un amplio rango de operación. Pese a esto, por la naturaleza de la
conexión entre el filtro pasivo y activo, este último debe permitir la circulación de la corriente
fundamental debida al aporte de potencia reactiva del filtro pasivo, por lo que el convertidor debe
especificarse a lo menos para esta corriente como se indica en (4.20). Esto impone como
requerimiento al control de la etapa activa la generación de una tensión fundamental necesaria sólo
para compensar las pérdidas en el convertidor y en el enlace DC.
11
13A
QI
V (4.20)
Con respecto a la compensación de corrientes armónicas, la variación de potencia reactiva
del filtro pasivo tiene un efecto que se explica a través del método de control indicado en la
expresión (4.15). Este método idealiza el filtro híbrido como un cortocircuito a las frecuencias
compensadas por lo que el total de la corriente armónica de la carga circula a través del filtro pasivo
y de la etapa activa (4.21). Por lo tanto, el voltaje armónico de la etapa activa puede reescribirse
según la expresión (4.22).
Ah LhI I (4.21)
Ah Lh FPhV I Z (4.22)
En esta expresión se observa que esta tensión depende de los parámetros del filtro pasivo, los
que a la vez están relacionados con la potencia reactiva. En la Fig. 4.6 se muestra la impedancia
equivalente de un filtro pasivo en función de la frecuencia para distintos valores de potencia
reactiva.

60
Fig. 4.6 Impedancia versus frecuencia para distintos valores de potencia reactiva.
Por inspección analítica de las ecuaciones que determinan los parámetros de los filtros
pasivos y despreciando la componente resistiva, se obtiene que la impedancia equivalente es
inversamente proporcional a la potencia reactiva. Esto se demuestra al observar los resultados de la
Fig. 4.6. Por lo tanto, la relación del voltaje armónico de la etapa activa con la potencia reactiva se
resume en la expresión (4.23).
1
1AhV
Q (4.23)
4.3.2 Frecuencia de sintonización
La frecuencia de sintonización define la zona del filtro pasivo de mayor efectividad en la
atenuación de componentes armónicas. Esta variable de diseño no tiene un efecto apreciable en el
desempeño del filtro híbrido a frecuencia fundamental puesto que está relacionada a la rama de
sintonización y tiene un efecto despreciable en el flujo de potencia reactiva. Si bien la Fig. 4.5
muestra un efecto significativo del filtro híbrido en la atenuación de componentes armónicas, filtrar
la distorsión armónica en frecuencias alejadas a la de sintonización implica mayores requerimientos
para la etapa activa. Esto se observa en la expresión (4.22), donde se considera la compensación
total de la corriente armónica inyectada por la carga y por lo tanto la distorsión de voltaje de la carga
es nula en las frecuencias que se compensa. Pese a lo positivo de esta condición, la corriente
armónica es un valor acotado definido por la operación de la carga, pero la impedancia del filtro
pasivo depende de la frecuencia. La operación en zonas alejadas a la frecuencia de sintonización

61
implica una elevada impedancia. En definitiva, la zona de compensación de corrientes armónicas
con el filtro híbrido debe ser próxima a la frecuencia de sintonización del filtro pasivo, de lo
contrario, el voltaje en terminales de la etapa activa se eleva considerablemente. Por otra parte, en la
literatura técnica se observan trabajos donde se propone la conexión de múltiples filtros pasivos
sintonizados a distintas frecuencias en serie a la etapa activa para aumentar el rango de
compensación armónica [15]-[30]. Sin embargo, la etapa activa debe ser especificada para operar
con una corriente fundamental mayor debido al aporte total de potencia reactiva por parte de los
filtros pasivos conectados.
4.4. Potencial de Compensación
El potencial de compensación del filtro híbrido tiene relación con la reducción de distorsión
armónica utilizando esta topología. Se observó en el Capítulo 3 que un diseño adecuado de filtros
pasivos puede reducir la distorsión a valores menores a los límites recomendados. Sin embargo los
límites no abarcan toda la distorsión presente en la planta industrial analizada debido a que no se
consideran las componentes sub e inter-armónicas. A partir de esta aplicación, en la Tabla 4.1 se
muestran las distorsiones de demanda máxima, características y no características evaluadas hasta
2500 Hz.
Tabla 4.1 Distorsiones armónicas de la corriente del sistema de planta industrial Fig. 3.17.
TDD THD Caract. THD No Caract. THD Total 1.11 % 1.33 % 1.34% 1.89 %
El TDD es obtenido con las componentes múltiplos enteros de la frecuencia fundamental con
respecto a la corriente de demanda máxima. La distorsión total característica, como se indicó en el
Capítulo 2, es determinada con la componente fundamental considerando la carga en operación y
componentes características (múltiplos enteros de la frecuencia fundamental). La distorsión total no
característica considera las componentes sub e inter-armónicas de la corriente con respecto a la
corriente fundamental de la carga en operación. Finalmente la distorsión total es calculada
considerando todas las componentes armónicas de corriente. Los resultados obtenidos muestran que
la distorsión no característica no es despreciable. Más aún, las distorsiones características y no
características son prácticamente semejantes y las interarmónicas con mayor amplitud se muestran
en la Tabla 4.2.

62
Tabla 4.2 Componentes interarmónicas de mayor amplitud.
Componente Frecuencia [Hz] Amplitud [%] f1+6fo M. SAG 84 0.50
f1+6fo M. Bolas (x2) 88 0.95
La compensación de estas componentes de mayor amplitud tiene como consecuencia una
reducción de la distorsión no característica. Los resultados esperados se muestran en la Tabla 4.3.
Tabla 4.3 Distorsiones armónicas de la corriente del sistema sin componentes interarmónicas de mayor amplitud.
TDD THD Caract. THD No Caract. THD Total 1.11% 1.33% 0.80% 1.55%
Los resultados esperados indican una efectiva reducción de la distorsión no característica y
como consecuencia la distorsión total disminuye un 0.34%. La mayor ventaja de esta compensación
es que permite atenuar los efectos de la distorsión de baja frecuencia en sistemas eléctricos.
4.5. Topología Propuesta
Se ha analizado la característica de potencia y distorsión armónica de la corriente de entrada
de los cicloconversores, junto con la compensación clásica utilizando filtros pasivos. Se mostró la
efectividad de los filtros pasivos para cumplir con los límites de distorsión armónica recomendados
en el IEEE Std. 519-1992, sin embargo, se deja en claro el deficiente desempeño en la atenuación de
componentes de baja frecuencia. Además se estudió la topología denominada filtro activo híbrido
considerando el efecto de la etapa pasiva sobre la etapa activa, lo que permite determinar las
características de operación esperadas de una topología híbrida. Esto lleva a proponer una topología
de compensación orientada a la operación de cicloconversores. La topología propuesta para la
compensación de potencia reactiva y corrientes armónicas inyectadas por el cicloconversor consta
del set de filtro pasivos diseñados originalmente (Tabla 3.2), con el filtro híbrido compuesto por un
filtro activo y el filtro pasivo tipo C sintonizado a la 2ª armónica como se indica en la Fig. 4.7.

63
Fig. 4.7 Topología propuesta de filtro híbrido con filtros pasivos.
Con esta topología se tienen las siguientes características de compensación:
Compensación pasiva de potencia reactiva.
Compensación pasiva de corrientes armónicas de media y alta frecuencia.
Compensación activa de corrientes armónicas de baja frecuencia.
Reducida intervención en el esquema de compensación original.
Posibilidad de incluir un bypass de la etapa activa.
El objetivo de esta topología es la compensación de potencia reactiva y corrientes armónicas
sobre 100 Hz a través de filtros pasivos. El filtro híbrido se orienta sólo para la compensación de
potencia reactiva original del filtro pasivo que lo compone y además, la compensación específica de
la corriente armónica de frecuencia f1+6fo que inyectan los cicloconversores. Por requerimientos
operativos, el molino SAG debe estar siempre en operación, por tal motivo la topología híbrida se
propone en el esquema pasivo correspondiente. Esta propuesta permite obtener reducidos
requerimientos de potencia de la etapa activa. La impedancia de la etapa pasiva del filtro híbrido se
muestra en la Fig. 4.8.
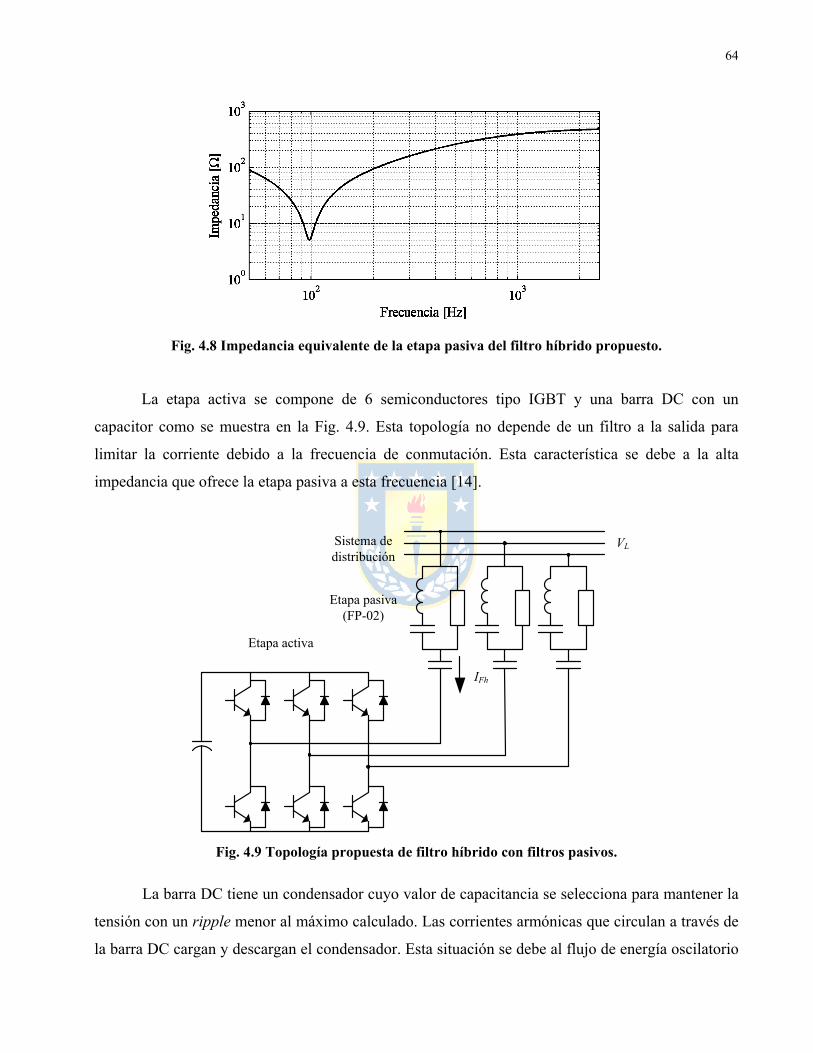
64
Fig. 4.8 Impedancia equivalente de la etapa pasiva del filtro híbrido propuesto.
La etapa activa se compone de 6 semiconductores tipo IGBT y una barra DC con un
capacitor como se muestra en la Fig. 4.9. Esta topología no depende de un filtro a la salida para
limitar la corriente debido a la frecuencia de conmutación. Esta característica se debe a la alta
impedancia que ofrece la etapa pasiva a esta frecuencia [14].
Etapa pasiva(FP-02)
Sistema de distribución
IFh
VL
Etapa activa
Fig. 4.9 Topología propuesta de filtro híbrido con filtros pasivos.
La barra DC tiene un condensador cuyo valor de capacitancia se selecciona para mantener la
tensión con un ripple menor al máximo calculado. Las corrientes armónicas que circulan a través de
la barra DC cargan y descargan el condensador. Esta situación se debe al flujo de energía oscilatorio

65
que idealmente tiene un valor medio nulo si se desprecian las pérdidas del convertidor. La literatura
no muestra trabajos con un método de diseño de este condensador para aplicaciones de filtros
híbridos, como tampoco consideraciones especiales producto de circulación de componentes
interarmónicas. Las capacitancias propuestas en los trabajos se verifican a través de los resultados de
simulación [13]. Por lo tanto, iterativamente puede seleccionarse el condensador que limita el ripple
al valor deseado que típicamente es menor a 1.0%. Por otra parte, la circulación de corrientes
interarmónicas sumado a la componente fundamental definen una potencia de aproximadamente 175
kVA. Para este cálculo se ha considerado una tensión fundamental igual a 2% en terminales de la
etapa activa. Esta potencia equivale a 2.9% la potencia reactiva de la etapa pasiva.
4.6. Limitantes en Generación de Referencia
La compensación armónica a través de filtros activos de potencia requiere de una etapa
imprescindible que se denomina generación de referencia, la que involucra la medición y
procesamiento de información. La medición tiene por objeto conocer las condiciones del sistema,
mientras que el procesamiento de la medición busca rescatar sólo lo relevante para la acción que se
necesita aplicar. La literatura relacionada con la compensación activa de sistemas trifásicos de
media tensión, propone esquemas para el filtrado de componentes características que son la 5ª, 7ª,
11ª, 13ª, y demás componentes armónicas relacionadas con topologías de 6 pulsos. Los métodos de
generación de referencia para estas componentes se pueden implementar de manera sencilla, esto es
debido a la diferencia en frecuencia con respecto a la componente fundamental.
Las componentes que se desean compensar con la topología están muy próximas a la
componente fundamental. Existe una separación de aproximadamente 34 Hz entre ellas para
operación nominal, lo que es menor si se reducen las frecuencias de salida de los cicloconversores.
Esta situación impone un requerimiento significativo al método de generación de referencia. Sin
embargo, la detección de frecuencia puede obviarse debido a que la frecuencia de salida de los
cicloconversores se puede realimentar al circuito de control del filtro híbrido.
Uno de los métodos más aplicados está determinado por la transformada dq0 que fue
inicialmente introducida en la modelación de máquinas eléctricas. A través de esta transformada,
aplicada a sistemas eléctricos, es posible mapear variables en ejes abc a componentes en dq0
caracterizándose por modificar las frecuencias de la variable original a valores en que se puede
aplicar el control clásico. Además, permite aislar la variable según la fase y frecuencias existentes
[24]. Esta transformada tiene la particularidad que en dq0 se mapea como componente continua la
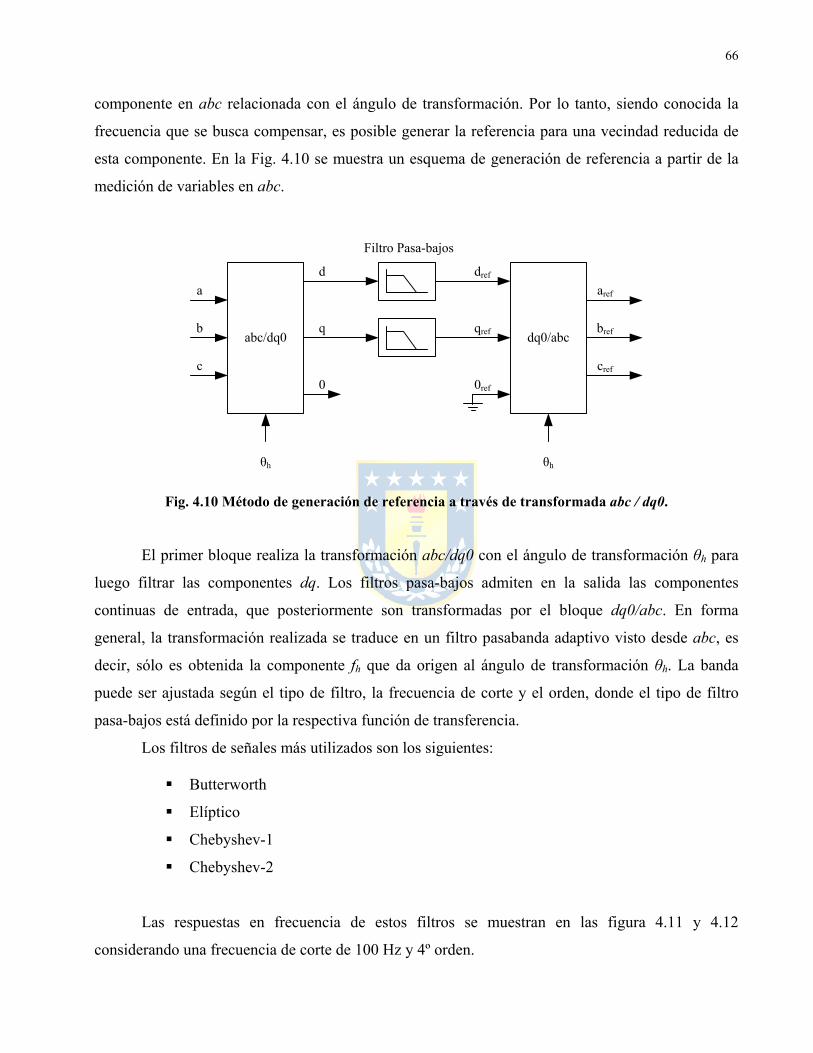
66
componente en abc relacionada con el ángulo de transformación. Por lo tanto, siendo conocida la
frecuencia que se busca compensar, es posible generar la referencia para una vecindad reducida de
esta componente. En la Fig. 4.10 se muestra un esquema de generación de referencia a partir de la
medición de variables en abc.
abc/dq0 dq0/abc
Filtro Pasa-bajos
a
b
c
d
q
0
dref
qref
0ref
bref
cref
aref
θh θh
Fig. 4.10 Método de generación de referencia a través de transformada abc / dq0.
El primer bloque realiza la transformación abc/dq0 con el ángulo de transformación θh para
luego filtrar las componentes dq. Los filtros pasa-bajos admiten en la salida las componentes
continuas de entrada, que posteriormente son transformadas por el bloque dq0/abc. En forma
general, la transformación realizada se traduce en un filtro pasabanda adaptivo visto desde abc, es
decir, sólo es obtenida la componente fh que da origen al ángulo de transformación θh. La banda
puede ser ajustada según el tipo de filtro, la frecuencia de corte y el orden, donde el tipo de filtro
pasa-bajos está definido por la respectiva función de transferencia.
Los filtros de señales más utilizados son los siguientes:
Butterworth
Elíptico
Chebyshev-1
Chebyshev-2
Las respuestas en frecuencia de estos filtros se muestran en las figura 4.11 y 4.12
considerando una frecuencia de corte de 100 Hz y 4º orden.
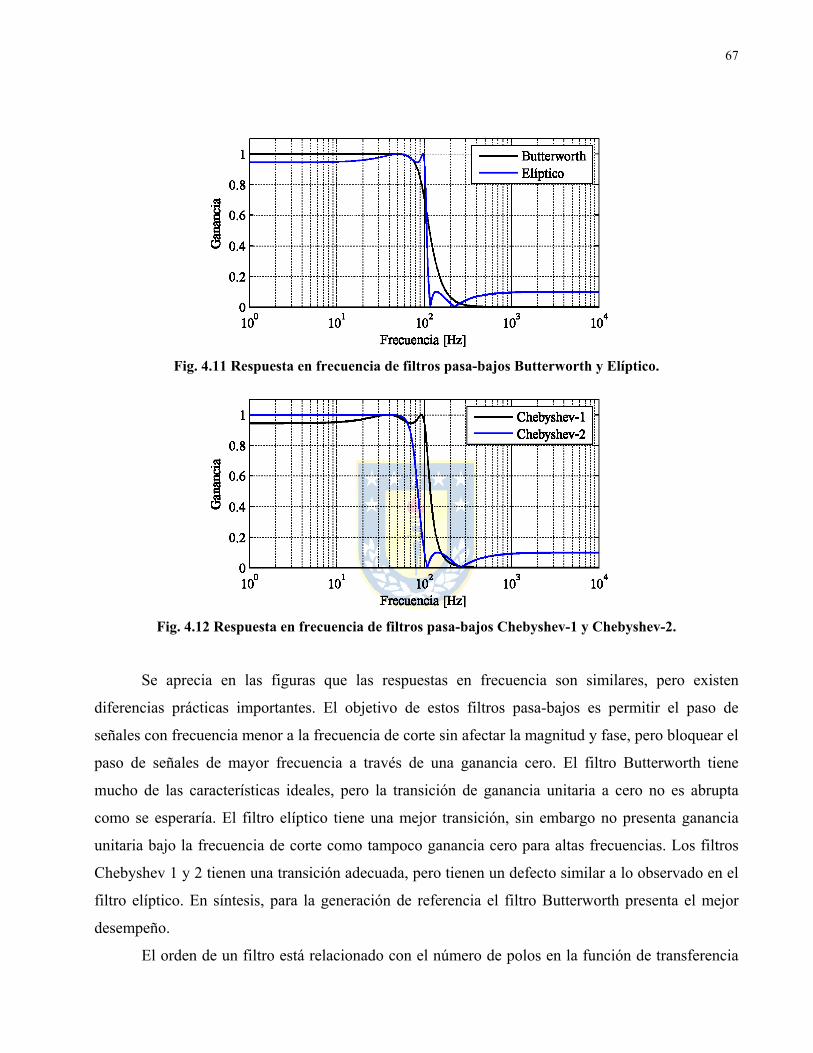
67
Fig. 4.11 Respuesta en frecuencia de filtros pasa-bajos Butterworth y Elíptico.
Fig. 4.12 Respuesta en frecuencia de filtros pasa-bajos Chebyshev-1 y Chebyshev-2.
Se aprecia en las figuras que las respuestas en frecuencia son similares, pero existen
diferencias prácticas importantes. El objetivo de estos filtros pasa-bajos es permitir el paso de
señales con frecuencia menor a la frecuencia de corte sin afectar la magnitud y fase, pero bloquear el
paso de señales de mayor frecuencia a través de una ganancia cero. El filtro Butterworth tiene
mucho de las características ideales, pero la transición de ganancia unitaria a cero no es abrupta
como se esperaría. El filtro elíptico tiene una mejor transición, sin embargo no presenta ganancia
unitaria bajo la frecuencia de corte como tampoco ganancia cero para altas frecuencias. Los filtros
Chebyshev 1 y 2 tienen una transición adecuada, pero tienen un defecto similar a lo observado en el
filtro elíptico. En síntesis, para la generación de referencia el filtro Butterworth presenta el mejor
desempeño.
El orden de un filtro está relacionado con el número de polos en la función de transferencia
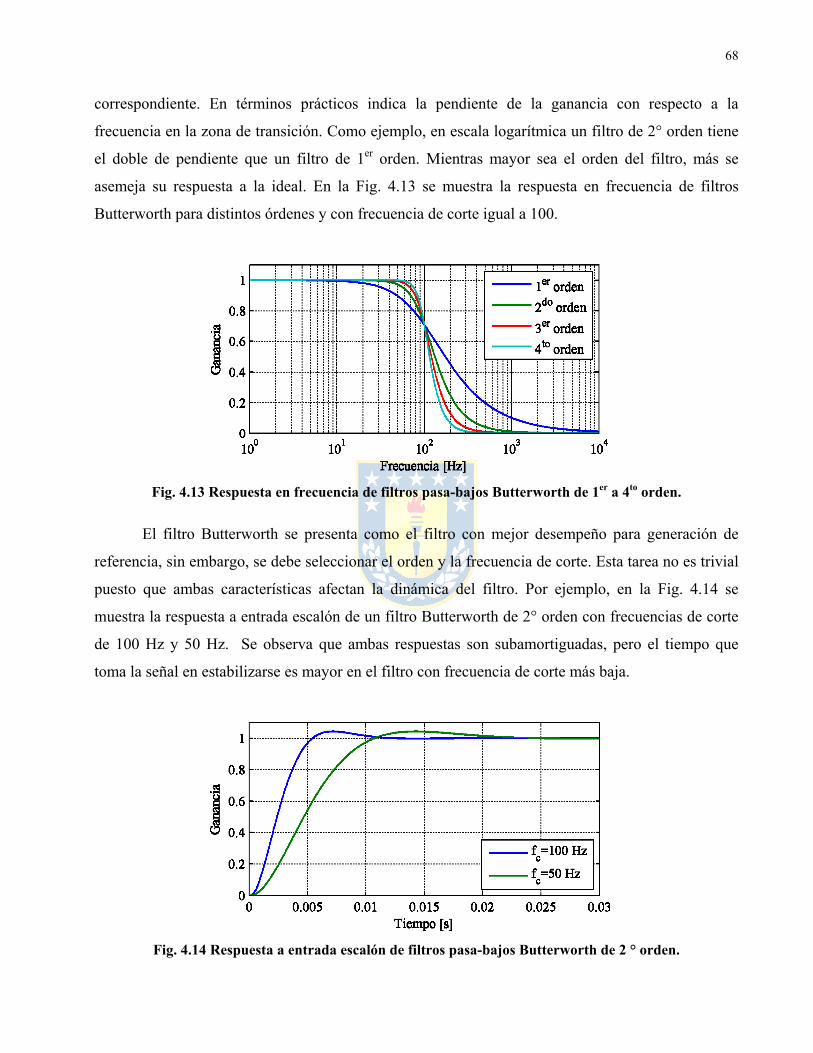
68
correspondiente. En términos prácticos indica la pendiente de la ganancia con respecto a la
frecuencia en la zona de transición. Como ejemplo, en escala logarítmica un filtro de 2° orden tiene
el doble de pendiente que un filtro de 1er orden. Mientras mayor sea el orden del filtro, más se
asemeja su respuesta a la ideal. En la Fig. 4.13 se muestra la respuesta en frecuencia de filtros
Butterworth para distintos órdenes y con frecuencia de corte igual a 100.
Fig. 4.13 Respuesta en frecuencia de filtros pasa-bajos Butterworth de 1er a 4to orden.
El filtro Butterworth se presenta como el filtro con mejor desempeño para generación de
referencia, sin embargo, se debe seleccionar el orden y la frecuencia de corte. Esta tarea no es trivial
puesto que ambas características afectan la dinámica del filtro. Por ejemplo, en la Fig. 4.14 se
muestra la respuesta a entrada escalón de un filtro Butterworth de 2° orden con frecuencias de corte
de 100 Hz y 50 Hz. Se observa que ambas respuestas son subamortiguadas, pero el tiempo que
toma la señal en estabilizarse es mayor en el filtro con frecuencia de corte más baja.
Fig. 4.14 Respuesta a entrada escalón de filtros pasa-bajos Butterworth de 2 ° orden.
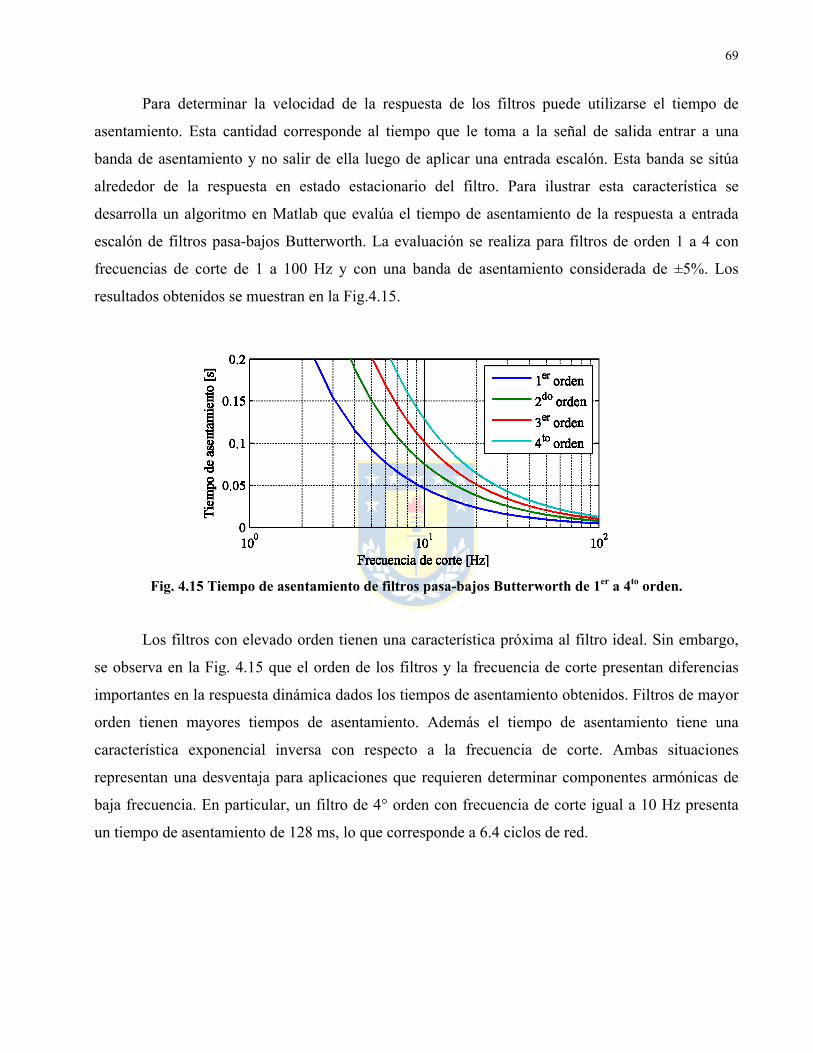
69
Para determinar la velocidad de la respuesta de los filtros puede utilizarse el tiempo de
asentamiento. Esta cantidad corresponde al tiempo que le toma a la señal de salida entrar a una
banda de asentamiento y no salir de ella luego de aplicar una entrada escalón. Esta banda se sitúa
alrededor de la respuesta en estado estacionario del filtro. Para ilustrar esta característica se
desarrolla un algoritmo en Matlab que evalúa el tiempo de asentamiento de la respuesta a entrada
escalón de filtros pasa-bajos Butterworth. La evaluación se realiza para filtros de orden 1 a 4 con
frecuencias de corte de 1 a 100 Hz y con una banda de asentamiento considerada de ±5%. Los
resultados obtenidos se muestran en la Fig.4.15.
Fig. 4.15 Tiempo de asentamiento de filtros pasa-bajos Butterworth de 1er a 4to orden.
Los filtros con elevado orden tienen una característica próxima al filtro ideal. Sin embargo,
se observa en la Fig. 4.15 que el orden de los filtros y la frecuencia de corte presentan diferencias
importantes en la respuesta dinámica dados los tiempos de asentamiento obtenidos. Filtros de mayor
orden tienen mayores tiempos de asentamiento. Además el tiempo de asentamiento tiene una
característica exponencial inversa con respecto a la frecuencia de corte. Ambas situaciones
representan una desventaja para aplicaciones que requieren determinar componentes armónicas de
baja frecuencia. En particular, un filtro de 4° orden con frecuencia de corte igual a 10 Hz presenta
un tiempo de asentamiento de 128 ms, lo que corresponde a 6.4 ciclos de red.

70
4.7. Discusión y Conclusiones
El filtro híbrido puede modificar dinámicamente la potencia reactiva para responder a las
demandas de la carga, sin embargo, cualquier aumento de potencia reactiva implica requerimientos
importantes de potencia en la etapa pasiva y activa. Esta última debe tener una especificación de
corriente a lo menos la componente fundamental del filtro pasivo debido al flujo de potencia
reactiva. Para restringir la especificación de potencia no se recomienda el control de potencia
reactiva utilizando filtro híbrido, además que esta tarea se logra a través de la conexión multi-etapas
de filtros pasivos como se indicó en el ejemplo de aplicación. La operación del filtro híbrido puede
mejorar significativamente la característica de compensación de la etapa pasiva. Además tiene la
capacidad de reducir la resonancia que se produce en frecuencias menores a la de sintonización. El
potencial de compensación de la planta de molienda analizada permite reducir la distorsión no
característica en 0.54% y como consecuencia la distorsión total a 1.55%. La potencia requerida en la
etapa activa corresponde a 2.6% con respecto a la potencia de la etapa pasiva. Pese a lo auspicioso
de los resultados de potencia requerida, la compensación de baja frecuencia presenta tiempos de
respuesta lentos en comparación a la compensación armónica de componentes de mayor frecuencia.
Se observó que los tiempos de respuesta pueden ser mayores a 5 ciclos de red.

71
Capítulo 5. Conclusiones
5.1. Sumario
Este trabajo presentó algunas motivaciones por las que el cicloconversor sigue siendo la
primera alternativa para el accionamiento en procesos de molienda a pesar de tratarse de una
topología usada por primera vez hace 40 años. Se discutió el principio de operación y las topologías
de cicloconversores con los esquemas de control tradicionales. Se indicaron las principales
características del cicloconversor. A través del análisis de la componente fundamental de la
corriente se obtuvo el factor de desplazamiento para distintas condiciones de operación. Se demostró
además la necesidad de operar la carga con factor de desplazamiento unitario y se obtuvo la
característica de potencia de entrada del cicloconversor. Con respecto a la distorsión armónica se
presentaron las componentes teóricas en la corriente de entrada y se obtuvo el espectro armónico a
través de simulación para un amplio rango de operación. En la simulación se identificaron las
componentes de baja frecuencia que resultan del análisis teórico de la operación del cicloconversor.
Se presentaron las topologías de filtros pasivos típicamente utilizadas en la industria. Se
analizaron las topologías pasa-banda, pasa-altos y tipo C con las respectivas expresiones para
determinar los parámetros de los elementos que las componen. Se estudió las pérdidas a través de
una aproximación que permite relacionar los resultados con las variables de diseño. Se propuso
evaluar la efectividad de los filtros pasivos a través del factor de atenuación puesto que permite
cuantificar la compensación armónica e identificar resonancias. A partir del análisis de la atenuación
armónica se determinaron restricciones que permiten tomar decisiones para distribuir de mejor
manera la potencia reactiva entre el esquema de filtros pasivos. Se comentó el impacto cualitativo de
las variables de diseño en el costo de filtros pasivos. Se agruparon los resultados obtenidos del
análisis de los filtros pasivos en una tabla que resume el efecto de las variables de diseño en la
atenuación armónica, pérdidas y costo, lo que se traduce en una base para tomar decisiones durante
un proceso de diseño. Se utilizaron los análisis realizados para diseñar el esquema de compensación
pasivo de una planta de molienda real que presenta tres molinos accionados por cicloconversores y
se evaluaron los resultados aplicando el IEEE Std. 519-1992. Se discutió la presencia de
componentes de baja frecuencia y la relación con los filtros pasivos.
Finalmente se presentó la topología del filtro híbrido paralelo indicándose las ventajas para
aplicaciones de media tensión. Se analizó el principio de operación para la compensación de

72
potencia reactiva a través de una metodología que permite determinar el desempeño de la etapa
pasiva y activa con respecto a la potencia reactiva total generada por el filtro híbrido. Además se
indicó el principio de operación para la compensación de corrientes armónicas, observándose que la
topología híbrida modifica el desempeño de etapa pasiva tanto en la atenuación armónica como en la
reducción de resonancias. También se analizó las variables que afectan los requerimientos de
potencia de la etapa activa y en esta línea se determinó la influencia de la potencia reactiva y la
frecuencia de sintonización para definir la operación del filtro híbrido. A partir del ejemplo de
diseño de filtros pasivos para la planta de molienda real se determinó el potencial de compensación
con lo que se propone una topología de filtro híbrido orientada a la atenuación de componentes de
baja frecuencia. Se indican las principales características de la etapa activa y se explica la limitante
para la generación de referencia debido a la proximidad de las componentes a compensar con
respecto a la componente fundamental.
5.2. Comentarios
Sin un cambio tecnológico importante, el tiristor como semiconductor continuará siendo
elemento con las mayores prestaciones para manejar tensiones y corrientes elevadas. La molienda
como accionamiento de alta potencia y con velocidades de operación menores a 20 rpm requiere ser
controlada, lo que se logra satisfactoriamente a través de cicloconversores.
Los filtros pasivos son la alternativa indiscutible para la compensación de potencia reactiva y
corrientes armónicas. Esta solución no tiene límite de potencia debido a que se puede separar la
potencia reactiva total entre distintas unidades. Las distintas topologías analizadas muestran
diferencias prácticas importantes. Una de ellas es la capacidad para amortiguar la corriente inrush
producida durante la conexión, la que es deficiente en el filtro pasa-banda. Los resultados muestran
que existe una diferencia de al menos un orden de magnitud en la capacidad para amortiguar esta
corriente con respecto a otras topologías. Esto explica uno de los motivos por el que filtros pasa-
altos y tipo C actualmente se proponen y aplican en mayor medida. Además, el filtro pasa-banda
tiene una característica de impedancia menos flexible para atenuar componentes adicionales a la
frecuencia de sintonización. Las pérdidas en filtros pasivos pueden preverse a través del análisis de
la componente resistiva de la impedancia con respecto a las variables de diseño. Este trabajo
demuestra que filtros con baja frecuencia de sintonización tienden a presentar mayores pérdidas y
por lo tanto deben aplicarse medidas correctivas como lo es aumentar el factor de calidad en
reactores. Otra desventaja de estos filtros es que se deben especificar con elevada potencia reactiva

73
para mantener un desempeño adecuado en la atenuación armónica. Por otra parte, filtros con
frecuencia de sintonización mayor son altamente efectivos y se pueden especificar con una potencia
reactiva suficiente para una adecuada compensación armónica. Estas características se deben a la
componente mayormente inductiva en la impedancia del sistema y queda demostrado a través del
cálculo del factor de atenuación. Los costos de los filtros pasivos es información manejada por
fabricantes, pese a esto, se puede inferir el efecto de modificar las variables de diseño. Un claro
ejemplo es el aumento del factor de calidad para reducir las pérdidas en el filtro, sin embargo, para
lograr este objetivo el inductor debe tener un conductor de mayor sección para disminuir la
componente resistiva parásita. La literatura típicamente muestra las distintas topologías, el cálculo
de parámetros y casos de aplicación con el objetivo primario de reducir distorsión armónica.
La compensación a través de un esquema pasivo permite reducir los niveles de distorsión
armónicos para cumplir los límites normativos. Sin embargo, no se definen límites para las
componentes no características, las que se presentan significativamente en una planta de molienda.
El filtro híbrido permite mejorar el esquema de compensación pasivo. Tiene la capacidad de
compensar dinámicamente la potencia reactiva, sin embargo, es una topología poco eficiente desde
el punto de vista de la especificación de potencia en la etapa pasiva y activa que la conforman. El
análisis muestra que un aumento de 2 veces la potencia reactiva de la etapa pasiva implica una
potencia de 4 veces la potencia en la etapa pasiva y 2 veces por parte de la etapa activa (en
contraposición). La reducción de la potencia reactiva del filtro híbrido no aumenta la especificación
en ambas etapas. Una característica más ventajosa corresponde a la atenuación armónica del filtro
híbrido. Esta topología permite mejorar la efectividad de la etapa pasiva a la vez que puede atenuar
resonancias, lo que no es posible lograr modificando las variables del filtro pasivo. La etapa pasiva a
su vez influye en las características de potencia de la etapa activa. Por ejemplo, el convertidor debe
ser especificado a lo menos la corriente fundamental debida al aporte de potencia reactiva. Por otra
parte, el voltaje armónico de la etapa activa es limitado por la barra DC por lo que acota la
atenuación armónica en proximidades de la frecuencia de sintonización.
5.3. Conclusiones
La operación del cicloconversor trifásico presenta un factor de desplazamiento en la entrada
desde un valor cercano a cero para bajos índices de modulación, el que se eleva hasta el máximo
teórico que es 0.84. Independiente de la carga conectada, este valor siempre es en atraso por lo que

74
es un equipo que demanda potencia reactiva desde la red. Se observó que con índice de modulación
unitario, el factor de desplazamiento es aproximadamente 0.8. Este valor hace que la potencia activa
y reactiva sea igual a 0.8 y 0.6 respectivamente, lo que muestra la elevada demanda de potencia
reactiva de este convertidor. Esta situación empeora con operación a menor carga, por lo que debe
tenerse en consideración para determinar la compensación de potencia reactiva. En la topología de
12 pulsos la corriente de entrada presenta una distorsión característica máxima de 10.9%. Esta
distorsión decae según aumenta la carga hasta llegar a 5.5%. La distorsión armónica no
característica dista bastante de ser una cantidad despreciable. Con bajo índice de modulación se
presenta un 6.7% de distorsión y aumenta hasta llegar a 16.2%. La distorsión total tiene un valor
mínimo de 12.8% y se obtiene un máximo de 17.1% con índice de modulación 1.15.
Las aseveraciones hechas en este trabajo relacionadas con las pérdidas, atenuación armónica
y costos se obtienen a partir del análisis de las distintas variables de diseño, lo que permite proponer
recomendaciones generales de diseño de filtros pasivos. El proceso de diseño es un problema
iterativo donde se tienen más variables que ecuaciones, pero las recomendaciones permiten acotar
las decisiones de diseño para obtener soluciones adecuadas desde el punto de vista de compensación
de potencia reactiva, atenuación armónica, pérdidas y costo. El ejemplo de aplicación de una planta
de molienda muestra la necesidad de la compensación de potencia reactiva y de atenuar las
componentes armónicas. A través del diseño de filtros pasivos propuesto se logra reducir la
distorsión de demanda total a 1.11%, lo que cumple satisfactoriamente el límite de 2.50%. La
componente 11ª presenta la mayor amplitud armónica de la carga. El filtro sintonizado a esta
frecuencia tiene una potencia reactiva mayor para mejorar la atenuación, permitiendo que la 11ª
armónica de corriente en el sistema sea de 0.28% con límite de 1.00%. Este filtro además atenúa la
13ª armónica para cumplir con idéntico límite. En resumen, ninguna de las componentes
individuales presenta un valor que excede los límites correspondientes. Pese a esto, la solución
propuesta puede producir resonancia en proximidades a la componente fundamental. En esta zona se
encuentran las componentes f1+6fo generadas por los cicloconversores. La resonancia amplifica 2.01
veces la componente del molino SAG y 1.68 veces las componentes de los molinos Bolas. Las
pérdidas de cada esquema son menores al 1% con respecto a la potencia reactiva total.
El ejemplo de la planta de molienda muestra que el potencial de compensación se encuentra
en las componentes no características que son producidas por los cicloconversores y amplificadas
por los filtros pasivos. Esto lleva a proponer una topología de filtro híbrido para la compensación de
componentes de baja frecuencia. Se observó que la distorsión total no característica es igual a 1.34%
75
y que a través de la compensación de las componentes identificadas como f1+6fo se logra una
reducción de 0.54%. Esta componente es igual a 84 Hz en el cicloconversor del molino SAG y 88
Hz en los cicloconversores que accionan los molinos Bolas. Con estas consideraciones la distorsión
no característica se reduce 0.54% y la distorsión total disminuye hasta llegar a 1.55%. El principal
inconveniente es la proximidad entre las componentes que se buscan compensar y la componente
fundamental. La diferencia es de aproximadamente 34 Hz para operación nominal, lo que implica
importantes requerimientos al método de generación de referencia. El método propuesto muestra
que la respuesta dinámica del esquema presenta un tiempo de asentamiento de 128 ms si se utiliza
un filtro Butterworth de 4° orden con frecuencia de corte de 10 Hz. Esta dinámica es lenta
comparada con respuestas menores a un ciclo de red conseguidas en filtros activos que compensan
corrientes armónicas de mayor frecuencia.
El trabajo realizado muestra que los filtros pasivos pueden ser una alternativa suficiente para
la compensación de potencia reactiva y de corrientes armónicas siempre que el diseño se ajuste a los
requerimientos normativos y considere la presencia de componentes interarmónicas. La topología
híbrida permite mejorar el esquema de compensación, pero en plantas con altos requerimientos de
potencia reactiva, comparativamente los filtros pasivos realizan una acción de compensación mucho
más efectiva desde el punto de vista de potencia reactiva y atenuación de componentes armónicas.
5.4. Trabajo Futuro
Durante el desarrollo de este trabajo, se observó que no existen temas cubiertos en la
literatura. Estos se indican a continuación:
Análisis del efecto de componentes interarmónicas de baja frecuencia en índice Flicker: El
Flicker se debe a fluctuaciones de voltaje a baja frecuencia con una banda centrada en 8.8 Hz. Sin
embargo, bloques funcionales del denominado FlickerMeter manipulan las variables medidas y
existe el riesgo de considerar componentes mayores a la componente fundamental en el cálculo de
Flicker. En estricto rigor, componentes por sobre 50 Hz no producen un parpadeo molesto al ojo
humano.
Metodología de diseño de filtros pasivos: Un procedimiento de diseño que permita diseñar
una estructura sin la necesidad de mayor experiencia en compensación pasiva. Además que pueda
distribuir la atenuación armónica en el rango de frecuencia de interés.

76
Evaluación dinámica de conexión de filtros pasivos: Se observó en este trabajo que la
conexión de esquemas de filtros pasivos a la barra de media tensión en plantas de molienda está
ligado a la operación de los correspondientes molinos. Además de la compensación de potencia
reactiva, el filtro permite mejorar el perfil de tensión en el punto de conexión. No es evidente el
instante de conexión de estos filtros durante la partida de molinos.
Método de medición de componentes sub e interarmónicas: La medición de componentes no
características tratada en este trabajo presenta tiempos de respuesta mayor a lo esperado, además que
se basa en la detección de componentes de frecuencia conocida debido a la operación del
cicloconversor con frecuencia de salida fo. El cálculo de frecuencia y magnitud de estas
componentes es de interés para obtener un método de generación más robusto.
Optimización de estructuras híbridas: La topología híbrida presenta ventajas para la
utilización en media tensión, pero los requerimientos de potencia se ven influenciados por las
características de la etapa pasiva. Este problema corresponde a un problema de optimización con
base en la potencia reactiva y frecuencia de sintonización del filtro pasivo conectado en serie al
convertidor.

77
Bibliografía [1] Norma Técnica de Seguridad y Calidad de Servicio, Comisión Nacional de Energía, Octubre
2009.
[2] “IEEE Recommended Practices and Requirements for Harmonic Control in Electrical Power
Systems”, IEEE Std. 519-1992, 1993.
[3] “Advances in Comminution” Edited by S. Komar Kawatra. Society for Mining, Metallurgy
and Exploration, Inc., 2006.
[4] “Thyristor Phase Controlled Converters and Cycloconverters” B. R. Pelly, Willey
Interscience, 1971.
[5] Ronnie F. Chu, John J. Burns. “Impact of Cycloconverter Harmonics,” in IEEE Transactions
on Industry Applications. vol. 25, no. 3, May./June 1989.
[6] Yazhou Liu, Gerald Thomas Heydt, Ron F. Chu. “The Power Quality Impact of
Cycloconverter Control Strategies,” in IEEE Transactions on Power Delivery. vol. 20, no. 2,
April 2005.
[7] José R. Rodríguez, Jorge Pontt, Patricio Newman, Rodrigo Musalem, Hernán Miranda, Luis
Morán and Gerardo Alzamora. “Technical Evaluation and Practice Experience of High-
Power Grinding Mill Drives in Mining Applications,” in IEEE Transactions on Industry
Applications. vol. 41, no. 3, May/June 2005.
[8] “IEEE Guide for Application and Specification of Harmonic Filters”, IEEE Std. 1531-2003,
2003.
[9] J. C. Das. “Passive Filters – Potentialities and Limitations,” in IEEE Transactions on
Industrial Electronics. vol. 40, no. 1, Jan./Feb. 2004.
[10] Alexander B. Nassif, Wilsun Xu and Walmir Fleitas. “An Investigation on the Selection of
Filter Topologies for Passive Filter Applications,” in IEEE Transactions on Power Delivery.
vol. 24, no. 3, July 2009.
[11] Y. Xiao, J. Zhao and S. Mao. “Theory for the Design of C-type Filter,” presented at the 11th
International Conference on Harmonics and Quality of Power, 2004.
[12] Babak Badrzadeh, Kenneth S. Smith and Roddy C. Wilson. “Design Passive Harmonic
Filters for an Aluminum Smelting Plant,” in IEEE Transactions on Industry Applications.

78
vol. 47, no. 2, March/April 2011.
[13] Subhashish Bhattacharya, Po-Tai Cheng and Deepak Divan. “Hybrid Solutions for
Improving Passive Filter Performance in High Power Applications,” in IEEE Transactions
on Industry Applications. vol. 33, no. 3, May/June 1997.
[14] Rubén Inzunza and Hirofumi Akagi. “A 6.6 kV Transformerless Shunt Hybrid Active Filter
for Installation on a Power Distribution System,” in IEEE Transactions on Power
Electronics. vol. 20, no. 4, July 2005.
[15] Darwin Rivas, Luis Morán, Juan Dixon and José R. Espinoza. “Improving Passive Filter
Compensation Performance with Active Techniques,” in IEEE Transactions on Industrial
Electronics. vol. 50, no. 1, February 2003.
[17] John A. Houldsworth and Duncan A. Grant. “The Use of Harmonic Distortion to Increase the
Output Voltage of a Three-Phase PWM Inverter,” in IEEE Transactions on Industry
Applications. vol. IA-20, no. 5, July 1984.
[18] J. Tarunen, M. Salo and H. Tuusa. “A new Approach for Harmonic Filtering in High Power
Applications,” in the 5th International Conference on Power Electronics and Drive Systems.
vol. 2, 2003.
[19] Sukin Park, Jeong-hyoun Sung and Kwanghee Nam. “A New Parallel Hybrid Filter
Configuration Minimizing Active Filter Size,” in the 30th Annual IEEE Power Electronics
Specialists Conference. vol. 1, 1999.
[20] Hiforumi Akagi. “Active and Hybrid Filters for Power Conditioning,” in the International
Symposium on Industrial Electronics. vol. 1, 2000.
[21] S. Dan, D. Benjamin, R. Magureanu, L. Asiminoaei, R. Teodorescu and F. Blaabjerg.
“Control Strategies of Active Filters in the Context of Power Conditioning,” in the IEEE
European Conference on Power Electronics and Applications, 2005.
[22] Fausto B. Líbano, Domingos Simonetti and Javier Uceda. “Frequency Characteristics of
Hybrid Filter Systems,” in the 27th Annual IEEE Power Electronics Specialists Conference.
vol. 2, 1996.
[23] Duro Basic, Victor Ramsden and Peeter Muttik. “Harmonic Filtering of High-Power 12-
Pulse Rectifier Loads with a Selective Hybrid Filter System,” in IEEE Transactions on
Industrial Electronics. vol. 48, no. 6, December 2001.

79
[24] Mario González. “Estudio de la Transformación DQ para el Cálculo de Potencia Activa y
Reactiva en Filtros Activos de Corriente para Cancelación Armónica,” Tesis Maestría en
Ingeniería Eléctrica, Universidad Autónoma de San Luis Potosí, Enero 2004.
[25] Ronnie F. Chu and Jon J. Burns. “Impact of Cycloconverter Harmonics,” in IEEE
Transactions on Industry Applications. vol. 25, no. 3, May/June 1989.
[26] Zhenyuan Wang and Yilu Liu. “Modeling and Simulation of a Cycloconverter Drive System
for Harmonic Studies,” in IEEE Transactions on Industrial Electronics. vol. 47, no. 3, June
2000.
[27] Duro Basic, Vic Ramsden and Peeter Muttik. “Selective Compensation of Cycloconverter
Harmonics and Interharmonics by Using a Hybrid Power Filter System,” in the 31st Annual
IEEE Power Electronics Specialists Conference. vol. 3, 2000.
[28] J. Pontt, J. Rodriguez, J. San Martín, R. Aguilera, J. Rebolledo, E. Cáceres, I. Illanes and P.
Newman. “Interharmonic Currents Assessment in High-Power Cycloconverter-Fed Drives,”
in the 37th Annual IEEE Power Electronics Specialists Conference. vol. 3, 2006.
[29] B. Wu, J. Pontt, J. Rodriguez, S. Bernett and S. Kouro. “Current-Source Converter and
Cycloconverter Topologies for Industrial Medium-Voltage Drives,” in IEEE Transactions on
Industrial Electronics. vol. 55, no. 7, July 2008.
[30] J. Tarunen, M. Salo and H. Tuusa. “Comparison of Three Series Hybrid Active Power Filter
Topologies,” in the 11th International Conference on Harmonics and Quality of Power, 2004.
[31] Xiaodong Liang and Obinna Ilochonwu. “Passive Harmonic Filter Design Scheme,” in IEEE
Industry Applications Magazine. vol. 17, no. 5, Sept./Oct. 2011.
[32] Jakkpong Tupsa-ard, Chaiya Chamchoy and Thavatchai Tayjasanant. “High-Voltage Passive
Harmonic Filter Design,” in the 8th International Conference on Electrical
Engineering/Electronics, Computer, Telecommunications and Information Technology,
2011.
[33] S. Yousif, M. Wanik and A. Mohamed. “Implementarion of Different Passive Filter Designs
for Harmonic Mitigation,” in the Power and Energy Conference PECon, 2004.
[34] Gary Chang, Shou-Yung Chu and Hung-Lu Wang. “A New Method of Passive Harmonic
Filter Planning for Controlling Voltage Distortion in a Power System,” in IEEE Transactions
on Power Delivery. vol. 21, no. 1, January 2006.

80
[35] “Power Converter Handbook” R. W. Lye, Canadian General Electric Company Limited,
1976.
[36] B. Singh, V. Verma, A. Chandra and K. Al-Haddad. “Hybrid Filters for Power Quality
Improvement,” in IEE Proceedings on Generations, Transmission and Distribution. vol.
152, no. 3, May 2005.
[37] Sandra Peña Parra. “Cálculo de la Potencia Nominal de un Filtro Activo en Conexión
Híbrida para la Compensación en Sistemas Industriales” Informe de Memoria de Título,
Ingeniería Civil Eléctrica, Universidad de Concepción, Enero 2004.
[38] “Interarmonics in Power Systems”, IEEE Interharmonic Task Force, 2003.
[39] Prof. José R. Espinoza, “Apuntes Control Automático”, 543 444, 5ª Ed., Universidad de
Concepción, 2005.
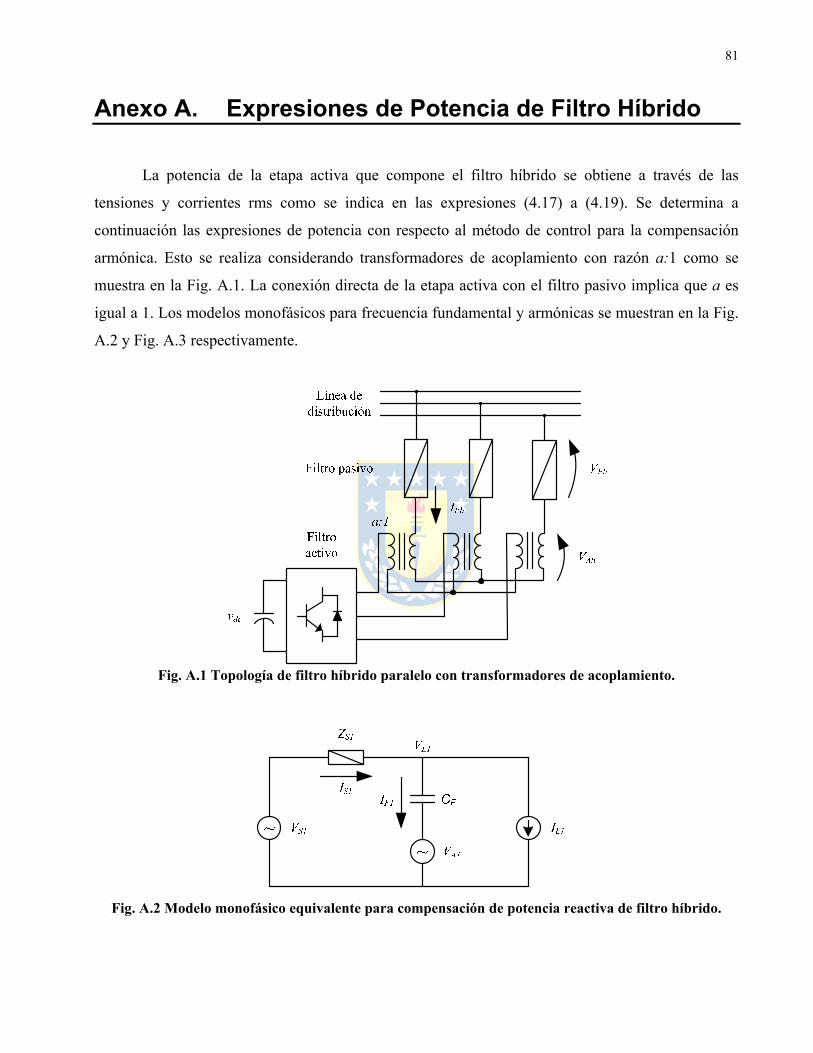
81
Anexo A. Expresiones de Potencia de Filtro Híbrido
La potencia de la etapa activa que compone el filtro híbrido se obtiene a través de las
tensiones y corrientes rms como se indica en las expresiones (4.17) a (4.19). Se determina a
continuación las expresiones de potencia con respecto al método de control para la compensación
armónica. Esto se realiza considerando transformadores de acoplamiento con razón a:1 como se
muestra en la Fig. A.1. La conexión directa de la etapa activa con el filtro pasivo implica que a es
igual a 1. Los modelos monofásicos para frecuencia fundamental y armónicas se muestran en la Fig.
A.2 y Fig. A.3 respectivamente.
Fig. A.1 Topología de filtro híbrido paralelo con transformadores de acoplamiento.
Fig. A.2 Modelo monofásico equivalente para compensación de potencia reactiva de filtro híbrido.

82
Fig. A.3 Modelo monofásico equivalente para compensación de armónicos con filtro híbrido.
Las componentes fundamentales de tensión VC1 y corriente IC1 en el convertidor están dadas
por las siguientes expresiones:
1 1 1 1 1 1 1C A T C L T CV aV Z I a V Z I (A.1)
11 1
(1 )1 1 LC A
CF
VI I
a a jX
(A.2)
Con VL1 y XCF la tensión de alimentación del sistema eléctrico y la reactancia del filtro
pasivo a frecuencia fundamental, despreciando las pérdidas. Puesto que la impedancia del
transformador ZT puede ser significativa, se ha incluido modelada en el análisis como impedancia
serie referida al secundario. Por otra parte, las componentes armónicas de tensión VCh y corriente ICh
en el convertidor son:
Ch AhV aV (A.3)
1Ch AhI I
a (A.4)
A.1. Compensación armónica por control VAh=KISh
La tensión VCh y corriente ICh en el convertidor con este método de control están dadas por
las expresiones (A.5) y (A.6). En este caso la corriente que circula por el sistema y el filtro se a
través del divisor de corriente de la corriente de línea entre las impedancias respectivas.

83
FPhCh Lh Th Ch
Sh FPh
ZV aK I Z I
Z K Z
(A.5)
1 Sh
Ch LhSh Fh
Z KI I
a Z K Z
(A.6)
El voltaje rms de la etapa activa se obtiene con la componente fundamental y las
componentes armónicas compensadas.
2 2
_ 1C RMS C Chh
V V V (A.7)
2 2
_ 1C RMS C Chh
I I I (A.8)
En términos del modelo monofásico equivalente,
2 222 2 21
_ 1
(1 )CF T FPhC RMS L Lh
hCF Sh FPh
a jX Z ZV V a K I
ajX Z K Z
(A.9)
22
2
_ 12
1 (1 ) ShC RMS L Lh
hCF Sh Fh
Z KI V I
a X Z K Z
(A.10)
Finalmente, la potencia aparente de la etapa activa en operación está dada por:
_ _C C RMS C RMSS V I (A.11)
La expresión (A.11) permite determinar la potencia aparente del convertidor y transformador
en operación. Para la especificación de estos elementos se debe establecer las condiciones de
compensación de potencia reactiva y rango de compensación armónica, con el objetivo de
determinar la máxima tensión y corriente.

84
A.2. Compensación armónica por control VAh=- VFh
La tensión VCh y corriente ICh en el convertidor con este método de control están dadas por
las expresiones (A.12) y (A.13). En este caso la corriente que circula por el sistema y el filtro se a
través del divisor de corriente de la corriente de línea entre las impedancias respectivas.
Ch FPh LhV aZ I (A.12)
1Ch LhI I
a (A.13)
En términos del modelo monofásico equivalente,
22
2 221_ 1
(1 )CF TC RMS L FPh Lh
hCF
a jX ZV V a Z I
ajX
(A.9)
2
2 2
_ 12
1 (1 )C RMS L Lh
hCF
I V Ia X
(A.10)
Finalmente, la potencia aparente de la etapa activa en operación está dada por:
2
2 2 2 221 12
(1 )C L FPh Lh L Lh
h hCF
S V Z I V IX
(A.11)
A.3. Trabajos de investigación
A partir del desarrollo de esta memoria de título, se han obtenido resultados que fueron
presentados en la IEEE Industry Application Society Annual Meeting. Los trabajos son los
siguientes:
P. Aravena, G. Vallebuona, L. Morán, J. Dixon and O. Godoy, “Passive Filter for
High Power Cycloconverter Grinding Mill Drives” presented at the Industry
Applications Society Annual Meeting, 2009.
P. Aravena, L. Morán, J. Dixon, J. Espinoza and O. Godoy “A New Hybrid Filter
Topology for Sub and Inter-Harmonic Attenuation in Cycloconverter-Fed Drives
Applications” presented at the Industry Applications Society Annual Meeting, 2009.
85