mechanical energy dissipation: a relativistic thermodynamics approach
TRANSCRIPT

Mechanical energy dissipation:
a relativistic thermodynamics approach
J GuemezDepartamento de Fısica Aplicada
Universidad de CantabriaE-mail: [email protected]
June 2, 2011
Abstract
A textbook exercise with a block pulled on a rough surface by a con-servative force –with an electromagnetic origin–, and against a dissipativefrictional force, is described using a 4-vector relativistic thermodynam-ics approach, taking into account the thermal effects (mechanical energydissipation) produced in diathermal contact with a heat reservoir. Theconservative force is described using a relativistic electromagnetic for-malism and the whole exercise – with Mechanics, Thermodynamics andElectromagnetism parts – is solved in a Lorentz covariant form. The pro-cess is first described in ‘privileged frame’ S∞ in which both surface andheat reservoir are at rest, and after that in frame SA, in standard configu-ration with respect to frame S∞, showing the equivalence of descriptions,according to the Principle of Relativity. This exercise could well by ad-equate for sophomore students with an interest in Thermodynamics andSpecial Relativity.
PACS: 05.70.-a , 03.30.+p, 01.55.+b
1 Introduction
Introductory physics textbooks solve exercises in which a solid block moveson a rough surface against the action of a a friction force applied to it ([1],p. 198) (Fig. 1). In a prototypical situation, a block Z, with mass m, isaccelerated from rest along a table – with quasi infinite mass and at rest inframe reference S∞ – by an applied force F (all forces will be considered one-dimensional; so, in general, vectorial notation will be dropped) and againstthe action of a nonconservative (dissipative) force, a force of sliding friction f .It is find by experiment that a portion of the table along which the block slidesbecome warmer ([2], pp. 153-154). A friction force produces thermal effectsas a consequence of mechanical energy dissipation. These thermal effects arenot explicitly considered in many textbooks ([3], pp. 204-207) and this kindof exercise is solved using exclusively Newton’s Second Law formalism, which
1
includes the Centre-of-Mass Equation ([4], p. 1001), a kind of equation that,although resembling an energy equation, is actually not ([5], pp. 508-509).For a complete resolution of a textbook exercise involving a dissipative force, aformalism that includes the First Law of Thermodynamics must be consideredin addition to mechanical laws ([6], p. 270).
Fv
if
∆t vf
L
µ
N
mgB
8
Z
T
S
8
mq
E
x
yC
+
+
+
+
+
+
+
+
+
-
-
-
-
-
-
-
-
-
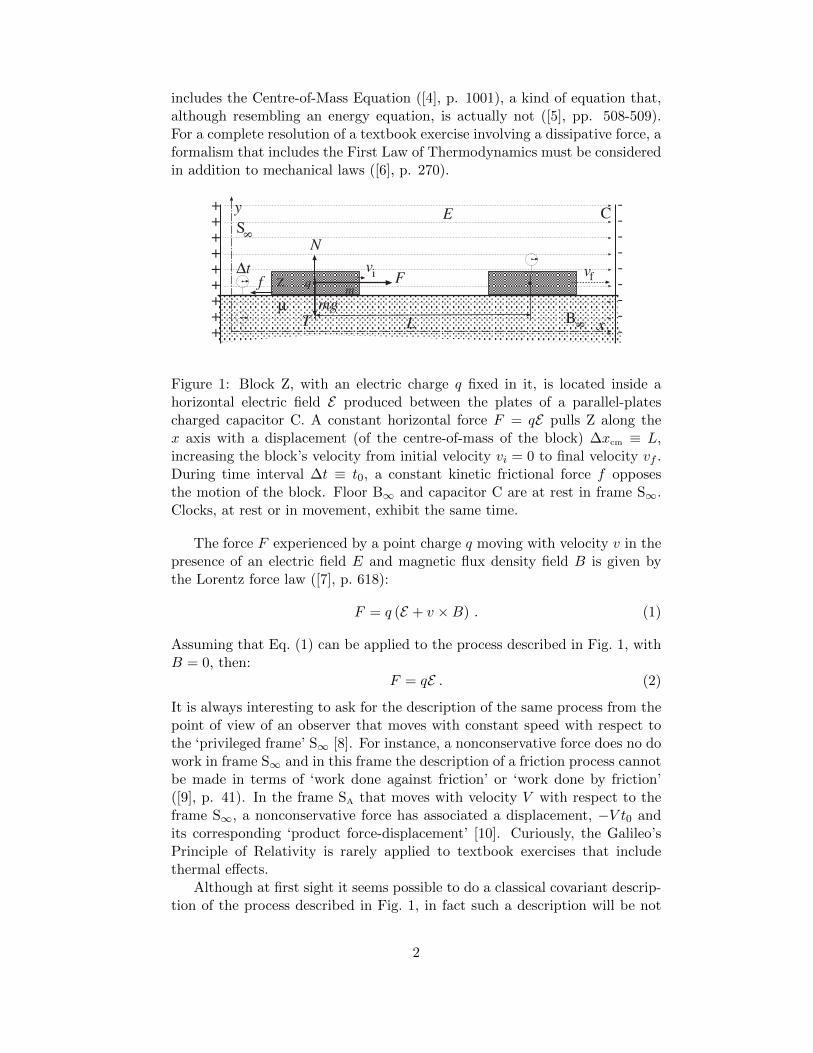
Figure 1: Block Z, with an electric charge q fixed in it, is located inside ahorizontal electric field E produced between the plates of a parallel-platescharged capacitor C. A constant horizontal force F = qE pulls Z along thex axis with a displacement (of the centre-of-mass of the block) ∆xcm ≡ L,increasing the block’s velocity from initial velocity vi = 0 to final velocity vf .During time interval ∆t ≡ t0, a constant kinetic frictional force f opposesthe motion of the block. Floor B∞ and capacitor C are at rest in frame S∞.Clocks, at rest or in movement, exhibit the same time.
The force F experienced by a point charge q moving with velocity v in thepresence of an electric field E and magnetic flux density field B is given bythe Lorentz force law ([7], p. 618):
F = q (E + v ×B) . (1)
Assuming that Eq. (1) can be applied to the process described in Fig. 1, withB = 0, then:
F = qE . (2)
It is always interesting to ask for the description of the same process from thepoint of view of an observer that moves with constant speed with respect tothe ‘privileged frame’ S∞ [8]. For instance, a nonconservative force does no dowork in frame S∞ and in this frame the description of a friction process cannotbe made in terms of ‘work done against friction’ or ‘work done by friction’([9], p. 41). In the frame SA that moves with velocity V with respect to theframe S∞, a nonconservative force has associated a displacement, −V t0 andits corresponding ‘product force-displacement’ [10]. Curiously, the Galileo’sPrinciple of Relativity is rarely applied to textbook exercises that includethermal effects.
Although at first sight it seems possible to do a classical covariant descrip-tion of the process described in Fig. 1, in fact such a description will be not
2

Galilean covariant because the electromagnetic forces considered, describedwith Eq. (1), are not Galilean covariant ([11], p. 282). On the other hand,the classical thermodynamics formalism that must be considered in order tosolve completely the exercise, taking into account the thermal effects, is notLorentz covariant either [12].
Moreover, although Einstein published the Special Theory of Relativityand Minkowski developed the concept of space-time more than a century ago,it is now realised that university physics textbooks do not solve exercises ([13],pp. 359, 361) using the versatile and powerful 4-vector formalism [11]. Thislack of Special Relativity and 4-vector formalism in the resolution of exercisesin textbooks should be considered a pedagogical shortcoming.
Because (point particle) Mechanics and Electromagnetism laws can be ex-pressed in a Lorentz covariant form, with the adequate Relativistic Thermody-namics formalism [12] it is possible to obtain a coherent and complete Lorentzcovariant formalism to deal with the kind of exercise in which conservativeforces have an electromagnetic origin and there are thermal effects involved.When an exercise is solved in the Minkowskian-Einstenian 4-vector formalism,such a solution is Lorentz invariant, in contrast with Newtonian-Galilean solu-tion, which is not. The classical Newtonian-Galilean solution can be obtainedin the limit c→∞ (clearly the reciprocal is not true).
This article is set out as follows. In Sec. 2 we discuss under which circum-stances a body can be considered a rigid solid according to special relativity.In Sec. 3 the pulled block exercise is described in a relativistic formalism with4-vectors function energy Uµ, work Wµ and heat Qµ obtained in the ‘privi-leged’ frame S∞. In Sec. 3.4 the First Law of Relativistic Thermodynamics∆Uµ = Wµ +Qµ is used to describe the friction process on the pulled block.The relativistic description of the dissipative process in reference frame SA – instandard configuration with respect to S∞ –, ∆UµA = Wµ
A +QµA, is considered inSec. 4, obtaining the corresponding 4-vectors function energy, work and heatin SA, showing that the description of the process is essentially the same for ob-servers both in S∞ and in SA, according to the Principle of Relativity. In Sec.5 we comment upon the didactic advantages of a relativistic thermodynamicsapproach when dealing with a process that involves electromagnetic forces andthermal dissipative effects, the obtention of the Newtonian-Galilean solutionand the meaning of this formalism within the bounds of non-dissipative ef-fects. Energy function for a rigid solid, characterised as an Einstein’s solid,is obtained in Appendix A, the work do for every force applied to the blockis obtained in Appendix B and energy function for thermal energy in a heatreservoir is obtained, using a description based on phonons, in Appendix C.
2 Rigid body in Relativity
A classical mechanics way to characterise a (rigid) solid is to assume that itdoes not deform under the action of a force, i.e., that every force applied to
3

a point on it is instantaneously transmitted, with infinite velocity, to the restof the body.
In the Special Theory of Relativity any perturbation on a body constituenttravels with finite velocity. So no body can be perfectly rigid in Relativity andit deforms under the action of a force applied to it. A deformation effect istransmitted to the rest of the body with finite velocity, vs, the velocity ofsound in the body’s material ([14], p. 172).
Let b be a characteristic linear dimension of a rigid body Z. If time intervalδt = b/vs –time delayed for a sound wave to travel along the body – is ordersof magnitude smaller than the interval of time ∆t during which forces areapplied to body Z, then, and under the action of a moderate force, it canbe considered that Z behaves as a rigid solid even from a relativistic point ofview ([15], p. 1007). We will consider a robust enough block to that its plasticdistortion response to the applied force can be considered negligible [16].
Assuming that for a body in a certain described process conditions aregiven in order to ensure that such a body behaves as rigid, then the Principleof Similitude ([12], p. 1215) can be applied: the relativistic equations for apoint particle with mass m can be used with a rigid body substituting m bythe rigid body inertia M (Sec. 3.1).
In the Special Relativity framework to be developed a (rigid) block maincharacteristic is that the velocity of its centre-of-mass (we retain this classicalnotation) vcm is the velocity that describes the displacement of the body asa whole (a rotation process will not be considered here): the centre-of-mass(cm) displaces a distance dxcm = vcmdt during an infinitesimal interval of timedt.
+
+
+
+
+
+
+
+
+
-
-
-
-
-
-
-
-
-
Fv
if∆t v
f
L
µ
N
PB
8
Z
T
S 8
q
E
MZ
τ
ωBωB
Figure 2: Relativistic description of the (isothermal) process on Z given inFig. 1. Clocks at rest in S∞ indicates its time t. Body Z proper time τ ismeasured by a clock attached to it. Body Z is described as an Einstein solidat temperature T formed by NA one-dimensional oscillators. Every oscillatorhas the same angular frequency ωZ and the same number of phonons nZ(T ).Mechanical energy dissipated during the process is represented as phonons–with angular frequency ωB – absorbed by B∞ (Sec. 3.3).
4

3 Block pulled on a surface with friction. Frame S∞
The process under consideration is described using the First Law of Relativis-tic Thermodynamics, which provides a unified description of mechanical andthermal effects [12]. To express and implement the Relativistic Thermody-namics First Law several 4-vectors, energy function, initial Uµi , and final, Uµf(Appendix A), work Wµ (Appendix B) – dealing with relativistic descriptionsof an electromagnetic force F and a non-conservative force f –, and heat Qµ –describing heat as phonons interchange between quantum oscillators in Z andin B∞ (Appendix C) –, are obtained.
Body Z is described as an Einstein’s solid formed by NA independent one-dimensional oscillators with angular frequency ωZ ([17], pp. 279-281) (Fig. 2).The floor B∞ is described as a quasi-infinite ensemble of one-dimensional oscil-lators with angular frequency ωB, at temperature T (thermal reservoir)(Appen-dix C). The proper time τ of Z is measured by a clock which travels with it.
We shall first consider the description of the process in the ‘privilegedframe’ (in the sense of the Asynchronous Formulation) S∞ in which the ca-pacitor C remains at rest as well as the floor B∞ ([18], p. 293). Then we willdescribe the same process in frame SA in standard configuration with respectto S∞ (Sec. 4).
In frame S∞ the block Z, initially at rest, vi = 0, after a time interval t0achieves a velocity vf (Fig.2). During the process its centre-of-mass displacesa distance L.
3.1 Four-vector energy function
To obtain the energy function for a solid body, U(T ), at certain tempera-ture T (we shall consider systems in internal equilibrium), it is necessary toconsider every process that produces the body from its elementary particlecomponents (protons, neutrons and electrons) and evaluate the total energyexchange involved in the solid assembly process ([19], p. 43) (Appendix A).
With the obtention of the 4-vector energy function U(T ) for a body, attemperature T , the Inertia of Energy Principle [12] allows us to obtain thebody’s inertia M(T ), as:
M(T ) = U(T ) c−2 .
This Einstein equation relates two concepts, function energy and inertia, clas-sically apart.
A rigid body can vary neither its function energy (its temperature) norits inertia during a process described using a relativistic formalism. If thetemperature of solid body Z is allowed to vary, its volume could vary andthis circumstance be in contradiction with its own nature as a non-deformablesolid. The formalism to be developed considers solely an isothermal process(constant T ) on the body Z, the kind of process in which the body’s inertia –although temperature dependent – remains constant, with M(T ) =MZ, and
5

in which the solid body can be considered that behaves as a point particle([20], pp. 121-122).
A referential frame SZ exists in which the solid body Z remains at rest(at least instantaneously). In frame SZ, body Z linear momentum pZ = 0 iszero and its total energy EZ = MZc
2 equals its energy function. In generalthe contravariant 4-vector energy function UµZ – a column 4-vector noted by aGreek index – is given by ([21], p. 321):
UµZ =
cpZ00EZ
.
(For typographical reasons a contravariant 4-vector can be written as a row,for instance UµZ = {cpZ, 0, 0, EZ}, preserving its Greek index). In frame SZ:
UµZ ={
0, 0, 0,MZc2}.
For an observer in frame reference S in standard configuration [22], withvelocity ~V = (V, 0, 0), with respect to frame SZ, the Lorentz’s transformationmatrix for the standard configuration is [23]:
Lµν (V ) =
γ(V ) 0 0 −β(V )γ(V )
0 1 0 00 0 1 0
−β(V )γ(V ) 0 0 γ(V )
, (3)
with β(V ) = V/c and γ(V ) =[1− β2(V )
]−1/2.
In frame S∞ in which Z displaces with velocity ~v = (v, 0, 0), the 4-vectorenergy function Uµ for Z is given by (Einstein summation convention):
Uµ = Lµν (−v)UνZ ,
(frame S∞ moves with velocity −v with respect to frame SZ), and one obtains:
Uµ =
γ(v) 0 0 (v/c)γ(v)
0 1 0 00 0 1 0
(v/c)γ(v) 0 0 γ(v)
000
MZc2
=
cγ(v)MZv
00
γ(v)MZc2
. (4)
Linear momentum p and total energy E for body Z in frame S∞ are given,respectively, by:
p = γ(v)MZv ,
E = γ(v)MZc2 ,
U = ||Uµ|| =(E2 − c2p2
)1/2,
MZ = c−2U ,
6

where function energy U is the norm [12] of the 4-vector Uµ (multiplied byc−2), MZ is its inertia, both U and MZ being the same for every inertialobserver [21]. This result for p and E can be obtained substituting the massm of a point particle for the inertia MZ in equations p = γ(v)mv and E =γ(v)mc2. Body Z kinetic energy K = E − U is:
K = [γ(v)− 1]MZc2 .
Given a rigid body Z (with constant inertiaMZ) which moves with initialvelocity vi in frame S∞, initial 4-vector energy function Uµi is:
Uµi ={cγ(vi)MZvi, 0, 0, γ(vi)MZc
2}.
With initial velocity vi = 0, then:
Uµi ={
0, 0, 0,MZc2}. (5)
For an infinitesimal process, with vf = vi + dv,
dUµ ={cMZ d [γ(v)v] , 0, 0,MZ d
[γ(v)c2
]}.
For a finite process, during which forces are applied to Z during a time interval∆t and the body reaches a final velocity vf , the 4-vector final energy functionUµf is given by:
Uµf ={cγ(vf )MZvf , 0, 0, γ(vf )MZc
2}, (6)
with the 4-vector energy function increment ∆Uµ:
∆Uµ = Uµf − Uµi . (7)
3.2 Four-vector work
In the relativistic description of the process given in Fig. 2 one needs to obtainthe 4-vector work Wµ
F for the conservative force F , the 4-vector work Wµf for
the friction force f and the total 4-vector work Wµ [24]. This achievementis done using the Asynchronous Formulation [25] for Relativistic Thermody-namics [26].
3.2.1 Conservative force F
In Relativity a conservative force F is characterised by a 4-vector Minkowski’sforce Fµ with spatial (force) and non-zero temporal (power) components ([11],p. 275).
In order to properly characterise, as a 4-vector Fµ, the force F applied toZ when this body moves with velocity v = dx/dt (vcm = dxcm/dt) in frameS∞, it is considered that an electric charge q is fixed in body Z and that this
7

charge is located inside a homogenous and constant electric field E (Fig. 2)characterised by a 4×4-tensor electromagnetic field Eµν (Appendix B):
Eµν =
0 0 0 E0 0 0 00 0 0 0E 0 0 0
.
With a 4-vector finite displacement Lµ = {L, 0, 0, ct0} for force F = qE ,L = ∆xcm being body Z centre-of-mass displacement, with
L =
∫ t0
0vdt ,
and t0 the interval of time during which force is applied to Z, the finite 4-vectorwork Wµ
F for this force is obtained as WµF = qEµν Lν , with:
WµF = q
0 0 0 E0 0 0 00 0 0 0E 0 0 0
L00ct0
=
cqEt0
00qEL
. (8)
This 4-vector WµF is expressed as the (minus) increment in energy function of
a work reservoir (the battery that provides the electric charge on capacitorand the electric field), with Wµ
F = −∆UµF [27].The 4-vector Wµ
F can be obtained in an alternative way. According to itsdefinition, linear impulse IF and work WF of force F can be obtained fromLorentz Force Eq. (1), F = qE , time interval t0 and displacement L as:
IF =
∫ t0
0Fdt = qEt0 ; WF =
∫ L
0Fdx = qEL .
From (Appendix B) the relationship:
Fµ = c−1δWµ
F
dτ,
with, Fµ = γ(v){F, 0, 0, c−1Fv
}, and dτ = γ−1(v)dt, then:
WµF = c
∫γ−1(v)Fµdt = {cIF , 0, 0,WF } ,
and:WµF = {cqEt0, 0, 0, qEL} .
3.2.2 Nonconservative force f
A dissipative force f cannot be obtained from a potential field, has neitherdisplacement nor work associated to a line integral ([9], pp. 40-41). A non-conservative force has no associated displacement in frame S∞, in which B∞remains at rest ([28], p. 616), its ‘product force-displacement’ is null and f is
8

a zero-work force [29]. Although in S∞ the body Z displaces in contact withB∞, the friction force f has zero displacement (dxf = 0), B∞ stops the blockwithout gaining kinetic energy ([3], p. 207).
In Newtonian mechanics a nonconservative force fs is characterized withthe vector ~f = (f, 0, 0), with impulse δIf = fdt and work δWf = 0.
In a process in which body Z slides on the surface of a quasi-infinite systemB∞ [8], force f can be described using two phenomenological rules ([30], pp.6-7): Amonton’s rule: the frictional force f is proportional to the normalor load N holding the two surfaces, and f is independent of the area of thesurfaces in contact, and Coulomb’s rule: force f is independent of the slidingvelocity ([31], pp. 884-885). We assume that force f can be described inSpecial Relativity using these phenomenological rules such that:
f = −µMZg ,
where N =MZg is the normal force of B∞ on Z.
The 4-vector fµ is an spacelike 4-vector in frame S∞, and so its propertime is t, i.e., time measured in frame S∞. In contact with B∞ force f doesno do work, with 4-vector fµ [v = 0, γ(v) = 1] given by:
fµ = {−µMZg, 0, 0, 0} .
Infinitesimal 4-vector associated work δWµf to this nonconservative force
is (Appendix B):δWµ
f = {−cµMZg dt, 0, 0, 0} .
Correspondingly, the finite 4-vector work Wµf for this force is:
Wµf = {−cµMZg t0, 0, 0, 0} . (9)
The same result Eq. (9) can be obtained considering that for force f :
If = −µMZgt0 ,
Wf = 0 ,
and that: Wµf = {cIf , 0, 0,Wf} = {−cµMZgt0, 0, 0, 0} .
For a solid body, forces are simultaneously applied to it in frame S∞ duringtime interval dt [25]. The 4-vector infinitesimal total work δWµ done on Z,associated to conservative and nonconservative force applied to it is given by([24], p. 84):
δWµ = δWµF + δWµ
f
δWµ = {c (qE − µMZg) dt, 0, 0, qEdx} ;x ≡ xcm .
For a finite process, with constant forces applied to it, for total work 4-vectorWµ one has:
Wµ = WµF +Wµ
f = {c (qE − µMZg) t0, 0, 0, qEL} . (10)
9

3.3 Four-vector heat
When a nonconservative force is present during a certain mechanical processon a rigid body, like the process described in Fig. 2, a portion of mechanicalenergy is dissipated as heat [28]. A complete relativistic formalism includes arelativistic description of heat [26], and the 4-vector heat Qµ is obtained [12](Appendix C).
According to Asynchronous Formulation generalization for heat ([12], p.1221), we assume that energy absorbed as phonons by B∞ has zero total linearmomentum in frame S∞, i. e.
∑r kr = 0, where kr is the wave vector for the
rth oscillator in the first layer oscillators of B∞.For a given rth oscillator with nB(T ) phonons, its total energy is Ef =
nB(T )hωB, its momentum is (one-dimensional) pf = nBhkr, and its 4-vectorenergy-momentum kµr is given by:
kµr = {+cnB(T )hk, 0, 0, nB(T )hωB} .
For every rth oscillator in B∞ that absorbs nB(T ) phonons with +k wavevector exists another sth oscillator, with −k wave vector, that absorbs thesame number of phonons:
kµs = {−cnB(T )hk, 0, 0, nB(T )hωB} .
Every pair of r + s oscillators in the first layer of B∞ have total 4-vectorenergy-momentum kµr+s given by:
kµr+s = {0, 0, 0, 2nB(T )hωB} .
During the friction process every oscillator in the first layer of B∞ experiencesan increment in energy ∆uB, due to mechanical energy dissipation, given by:
∆uB = nB(T )hωB .
With N/2 pairs r + s, total ∆UB = N∆uB and the corresponding 4-vectorenergy function increment of B∞, ∆UµB given by:
∆UµB = {0, 0, 0, NnB(T )hωB} .
We take heat Q to be positive when thermal energy is transferred to bodyZ and negative when the transfers are out of Z. The 4-vector heat Qµ is thengiven in frame S∞ as:
Qµ = −∆UµB = {0, 0, 0,−NnB(T )hωB} . (11)
3.4 Relativistic Thermodynamics First Law
The Relativistic Thermodynamics First Law in frame S∞ is given by [12]:
Uµf − Uµi = Wµ +Qµ . (12)
10

According to our treatment of conservative force work (WµF = −∆UµF ) and
heat (Qµ = −∆UT ), the First Principle can be expressed as:
∆Uµ + ∆UµF + ∆UµT = Wµf . (13)
This equation emphasizes the role played by the heat reservoir B∞, as a sinkfor dissipated mechanical energy, and the role of the battery that chargesthe capacitor C, which provides the work done on Z. The term Wµ
f appearsbecause of the quasi-infinite inertia of B∞.
For the process described in Fig. 2, the 4-vector final Uµf and initial energy
function Uµi are given by Eq. (5) and Eq. (6), respectively, 4-vector work Wµ
is given by Eq. (10) and 4-vector heat Qµ is given by Eq. (11), with:cγ(vf )MZvf
00
γ(vf )MZc2
−
000
MZc2
=
c (qE − µMZg) t0
00qEL
+
000
−NnB(T )hωB
.
According to this, the observer in S∞ obtains the following equations:
1. Relativistic Impulse-Momentum and Energy equations:
γ(vf )MZvf = (qE − µMZg) t0 , (14)
γ(vf )MZc2 −MZc
2 = qEL−NnB(T )hωB . (15)
2. Relativistic Centre-of-Mass Equation. Taking into account that ([32],p. 37):
d [γ(v)] = γ3(v)v
c2dv ,
d [γ(v) v] = γ3(v)dv ,
d[γ(v)c2
]d [γ(v)v]
= v ,
in an infinitesimal process:
d[γ(v)c2
]d [γ(v)v]
=(F/MZ) dx
(F/MZ) dt.
In a finite process, with constant (resultant) force F and inertiaMZ, inwhich forces are applied during time interval t0 and the centre-of-massof the body has a displacement L:
MZ
[γ(vf )c2γ(vi)c
2]
MZ [γ(vf )vf − γ(vi)vi]=FLFt0
.
According to this result, when Impulse-Momentum Eq. (14) is fulfilledthen the Relativistic Centre-of-Mass equation:
[γ(vf )− 1] c2MZ = (qE − µMZg)L , (16)
11

is fulfilled too. This Eq. (16) is expressed as ∆KZ = F∆xcm. TheRelativistic Impulse-Momentum equation (Relativistic Newton’s SecondLaw) and the Relativistic Centre-of-Mass equation are equivalent, asoccurs in the Newtonian description: Eqs. (14) and (16) contain thesame information, expressed in a different way ([33], p. 494 ).
3. Heat. Comparing Eq. (15), in which enters the work done by (external)conservative forces, and the Centre-of-Mass equation, Eq. (16), in whichenters the total resultant force, one obtains the heat equation:
NnB(T )hωB = µMZgL . (17)
The energy associated to the (mean) number of phonons nB(T ) gainedfor N oscillators (in the first layer of B∞) in heat reservoir B∞, equals theproduct dissipative force f -centre-of-mass displacement L. This Eq. (17)provides the number N of oscillators in B∞ that increase their energy innB(T ) phonons. With heat definition as Q = −NnB(T )hωB, one obtainsthat Q = −µMZgL.
+++++++++
FviA
f
vfA
Lµ
B 8
Z
T
S
q
E
MZ
A
ωL
A
∆tA AV
τ
ωR
Figure 3: Description in the frame SA, in which floor B∞ moves with velocity−V , of the friction process given in Fig. 2. Electric charge is q and the electricfield is EA. Forces applied to Z are FA and fA. In this frame, the initial velocityof Z viA and its final velocity is vfA. After the interval of time ∆tA, Z centre ofmass displacement is LA. Phonons are gained by thermal reservoir B∞ withangular frequency ωL (left) or ωR (right).
4 Block pulled description in frame SA
The observer in the frame SA (Fig. 3) describes a body Z, with constant inertiaMZ, which moves with initial velocity viA and final velocity vfA, an electricfield EA (and eventually a magnetic field BA), a force FA, applied to Z duringtime interval ∆tFA ≡ t0FA and with displacement ∆xFA ≡ LA, a force fAapplied to Z during time interval ∆tfA and with displacement ∆xfA and anensemble of oscillators in the first layer of B∞ that gain phonons, which carry
12

linear momentum IQA and energy ∆UBA. With the First Law in SA expressedas
∆UµA = WµA +QµA ,
the observer in SA obtains:cγ(vfA)MZvfA
00
γ(vfA)MZc2
−cγ(viA)MZviA
00
γ(viA)MZc2
=
cIA00WA
+
cIQA
00QA
,
where IA is the impulse on Z, WA is the work done on Z, IQA is the impulseassociated to the heat, and QA is the thermal energy interchanged between Zand B∞, all of them expressed in frame SA.
It is explicitly assumed that when an observer in SA actually performsexperiments and measures different magnitudes relative to the experimentcarried out in frame S∞, this observer in SA will obtain results that it wouldobtain if the corresponding 4-vectors in S∞ were transformed into SA 4-vectorsthrough Lorentz’s transformation Eq. (3) [24]. The observer in SA obtains ex-perimental results as the corresponding relativistic transformations on interval([11], p. 40), velocity ([11], p. 82), force ([7], pp. 619-620), electric and mag-netic field ([11], p. 282), etc., are applied to the corresponding magnitudes inS∞ [12].
In order to verify that the Principle of Relativity is fulfilled throughoutthis description, i.e., that the corresponding equations are fulfilled in SA aswell as their being fulfilled in S∞, ‘experimental’ results for the process underconsideration for the observer in SA (EA, FA, LA, t0FA, etc.) will be obtained,as function of measurements (E , F , L, t0, etc.) in S∞.
4.1 Energy function in SA
Observer in SA describes a body Z with initial velocity viA = −V , – momentumpiA = γ(viA)MZviA and energy EiA = γ(viA)MZc
2 – and with final velocityvfA = (vf −V )/(1−vfV/c2) – pfA = γ(vfA)MZvfA and EfA = γ(vfA)MZc
2 –.By relating the 4-vector velocity vµA = γ(vA) {vA, 0, 0, c} in SA and the 4-vectorvelocity vµ = γ(v) {v, 0, 0, c} in S∞ as vµA = Lµν (V )vν ([11], pp. 263-265), oneobtains the general useful transformations [12]:
γ(vA) = γ(V )γ(v)
(1− vV
c2
)(18)
γ(vA)vA = γ(V )γ(v) (v − V ) , (19)
With initial UµiA = {cpiA, 0, 0, EiA} and final UµfA = {cpfA, 0, 0, EfA} the 4-vector energy function initial and final in SA are, respectively:
UµiA ={−cγ(V )MZV, 0, 0, γ(V )MZc
2}, (20)
UµfA =
{cγ(V )γ(vf )MZ (vf − V ) , 0, 0, γ(V )γ(vf )MZ
(1− vfV
c2
)c2}. (21)
13

The same result for UµiA and UµfA is obtained doing UµiA = Lµν (V )Uνi , and
UµfA = Lµν (V )Uνf , with Uµi and Uµf given by Eq (5) and Eq. (6), respectively.
4.2 Work in SA
Force F transformations can be obtained using the electromagnetic field trans-formations. The 4 × 4-tensor Eµν transforms in frame SA, ([11], Cap. 34) as[γ2(V )− β2(V )γ2(V ) = 1]:
EAµν = Lµξ (V )EξχL+χν (V ) =
0 0 0 E0 0 0 00 0 0 0E 0 0 0
,
where the matrix L+µν (V ), defined as L+χν (V )Lµχ(V ) = 1µν , is given by ([11],pp. 280-281):
L+µν (V ) =
γ(V ) 0 0 β(V )γ(V )
0 1 0 00 0 1 0
β(V )γ(V ) 0 0 γ(V )
.
The electric field in SA is given by:
EA = E ,
and the magnetic field in SA is BA ≡ 0. From the corresponding Lorentz forcein SA:
FA = q (EA + vA ×BA) = qE ,
and FA = F .The corresponding 4-vector intervals ∆xµFA
in SA and ∆xνF in S∞, associ-ated to force F , are related as: ∆xµFA
= Lµν (V )∆xνF . With ∆xµF = {L, 0, 0, ct0}and ∆xµFA
= {LA, 0, 0, ct0A}, one has:
LA = γ(V ) (L− V t0) ,
t0FA = γ(V )
(t0 −
V
c2L
),
with
∆xµFA=
{cγ(V ) (L− V t0) , 0, 0, cγ(V )
(t0 −
V
c2L
)}.
The 4-vector WµFA
is obtained doing WµFA
= qEAµν∆xνFA, with:
WµFA
= q
0 0 0 E0 0 0 00 0 0 0E 0 0 0
cγ(V ) (L− V t0)00
cγ(V )(t0 − V L/c2
) = γ(V )
cqE
(t0 − V L/c2
)00
qE (L− V t0)
.
14

This result can be obtained as WµFA
= Lµν (V )W νF , with Wµ
F given byEq. (8). Relative to force f , imposing that 4-vector interval ∆xµfA in SA
and interval ∆xνf , have to be related as: ∆xµfA = Lµν (V )∆xνf , and with the
4-vector displacement for f in S∞ given by ∆xµf = {0, 0, 0, ct0}, one has:
∆xfA = −γ(V )V t0 ,
∆tfA = γ(V )t0 ,
with∆xµfA = {−cγ(V )V t0, 0, 0, cγ(V )t0} .
Comparing ∆xµFAand ∆xµfA, one observes that in reference frame SA forces
FA and fA are not simultaneously applied to Z (Asynchronous Formulation)and that force fA has an associated displacement ∆xfA 6= 0 in SA.
By imposing that the 4-vector Minkowski’s force fµ = {f, 0, 0, 0} andthe 4-vector Minkowski’s force fµA = γ(V )
{fA, 0, 0,−c−1fA · V
}are related as
fµA = Lµν (V )fν ([11], pp. 275-276) [using Eqs. (18)-(19)] one obtains that:
fA = f .
Impulse and work for force fA are:
IxfA = fA∆tfA = −µMZgγ(V )t0 ,
WfA = fA∆xfA = −µMZgγ(V )V t0 ,
and the 4-vector WµfA is given by:
WµfA = γ(V ) {−cµMZgt0, 0, 0,−µMZgV t0} .
In effect, WµfA = Lµν (V )W ν
f , with Wµf given by Eq. (9).
The 4-vector total work WµA in frame SA is then given by (Sec. 3.2):
WµA = Wµ
FA+Wµ
fA
= γ(V )
{c
[qE(t0 −
V
c2L
)− µMZgt0
], 0, 0, qE (L− V t0)− µMZgV t0
}, (22)
and WµA = Lµν (V )W ν , with Wµ given by Eq. (10).
4.3 Heat in SA
In frame SA, the 4-vector wave number-angular frequency KµA for an oscillator
with nB(T ) phonons ([11], pp. 269-272) is given byKµA = nB(T ) {chkA, 0, 0, hωBA},
and the corresponding 4-vector in S∞ is Kµ = nB(T ) {chk, 0, 0, hωB}, bothrelated as Kµ
A = Lµν (V )Kν . This relationship gives us the following set ofrelativistic transformations for kA and ωBA:
kA = γ(V )k − γ(V )VωB
c2,
ωBA = −γ(V )V k + γ(V )ωB .
15

Because every (independent) oscillator in B∞ first layer has initially zeroenergy e0 = 0 (Appendix A), initial energy function 4-vector in SA, UµiBA
isgiven by:
UµiBA= {0, 0, 0, 0} .
After the friction process, in frame SA, in the first layer of B∞, for any os-cillator with wave vector kA(+k) and angular frequency ωBA(+k) (with wavevector +k in S∞), there is another oscillator with wave vector kA(−k) andangular frequency ωBA(−k) (with wave vector −k in S∞). Total linear mo-mentum pBA and total energy EBA for N/2 pairs of oscillators in the first layerof B∞ in SA are given, respectively by:
pBA = h
(∑r
krA −∑s
ksA
)= −γ(V )
[NnB(T )hωB
c2
]V ,
EBA = h
(∑r
ωrBA +∑s
ωsBA
)= γ(V )NnB(T )hωB .
Thus, the final energy function 4-vector in SA, UµfBAis:
UµfBA=
{−cγ(V )
NnB(T )hωB
c2V, 0, 0, γ(V )NnB(T )hωB
}.
The 4-vector energy function increment (which represents the energy absorbedby oscillators in the first layer of B∞ during the friction process) ∆UµBA =UµfBA
− UµiBA, is:
∆UµBA =
{−cγ(V )
[NnB(T )hωB
c2
]V, 0, 0, γ(V )NnB(T )hωB
}.
The 4-vector heat for the friction process in SA, QµA is then:
QµA = −∆UµBA =
{cγ(V )
[NnB(T )hωB
c2
]V, 0, 0,−γ(V )NnB(T )hωB
}. (23)
The same result for QµA is obtained doing QµA = Lµν (V )Qν , with Qµ given byEq. (11).
4.4 Relativistic First Law in SA
Applying the First Law UµfA − UµiA = Wµ
A + QµA, with 4-vectors UµfA and UµiAgiven by Eqs. (20)-(21), work Wµ
A by Eq. (22) and heat QµA by Eq. (23), theobserver in SA obtains:
γ(V )
cγ(vf )MZ (vf − V )
00
γ(vf )MZ
(1− vfV/c2
)c2
− γ(V )
−cMZV
00
MZc2
= γ(V )
c[qE(t0 − (V/c2)L
)− µMZgt0
]00
qE (L− V t0) + µMZgV t0
+ γ(V )
c[NnB(T )hωB/c
2]V00
−NnB(T )hωB
.
16

In SA Impulse-Momentum and Energy Equation are given respectively by:
γ(V )γ(vf )MZ (vf − V )− γ(V )MZV = γ(V )qE(t0 −
V
c2L
)− γ(V )µMZgt0
+ γ(V )NnB(T )hωB
c2V , (24)
γ(V )γ(vf )MZ
(1− vfV
c2
)c2 − γ(V )MZc
2 = γ(V )qE (L− V t0) + γ(V )µMZgV t0
− γ(V )NnB(T )hωB . (25)
1. The Impulse-Momentum equation in frame SA, Eq. (24), can be ex-pressed as the sum:
γ(V )[γ(vf )MZvf = (qE − µMZg) t0
](26)
+
−γ(V )V
c2
[γ(vf )MZc
2 −MZc2 = qEL−NnB(T )hωB
], (27)
where Eq. (26) is the Impulse-Linear Momentum equation in S∞ andEq. (27) is the Energy Equation in S∞. These equations are fulfilled inS∞ and so Eq. (24) is fulfilled in SA.
2. The Energy Equation in frame SA can be expressed as the sum:
−V γ(V )[γ(vf )MZvf = (qE − µMZg) t0
](28)
+
γ(V )[γ(vf )MZc
2 −MZc2 = qEL−NnB(T )hωB
]. (29)
Because both equations are fulfilled in S∞, Eq. (25) is fulfilled in SA.
The corresponding Centre-of-Mass Equation in SA, written as ∆KA =∑k FkA∆xcmA, is:
[γ(vfA)− 1]MZc2 − [γ(viA)− 1]MZc
2 = (FA + fA) ∆xcmA . (30)
The displacement of the centre-of-mass of Z in SA is:
∆xcmA ≡ LA = γ(V ) (L− V t0) ,
and with previous transformations for γ(viA) and γ(vfA) Eqs. (18)-(19), theEq. (30) can be expressed as:
γ(V ){γ(vf )
(1− vfV
c2
)MZc
2 −MZc2 = (qE − µMZg) (L− V t0)
}. (31)
This equation can be written as the sum of two equations:
−γ(V ){
[γ(vf )− 1]MZc2 = (qE − µMZg)L
}, (32)
+
−γ(V )V{γ(vf )MZvf = (qE − µMZg) t0
}. (33)
17

Both Eq. (32) [Centre-of-Mass Equation in S∞] and Eq. (33) are fulfilled inS∞ and so Eq. (30) is fulfilled in SA.
Comparing Eq. (25) and Eq. (31) the observer in SA obtains the heatequation:
γ(V ){NnB(T )hωB = µMZgL
}. (34)
The observer in SA obtains the corresponding description, relativisticallycoherent and equivalent to the description in S∞, in its own frame of reference,and with its own measurements, of the process previously described in S∞.These result is according to the Principle of Relativity and the description ofthe process under consideration is Lorentz invariant.
5 Conclusions
We have developed a formalism for the First Law of Relativistic Thermo-dynamics able to be used in exercises that include thermal effects on rigidbodies. This formalism is expressed as a relationship between the 4-vectorenergy function variation ∆Uµ = Uµf − U
µi for a solid body, obtained from
Einstein’s Equation; the 4-vector work Wµ – with the 4-vector WµF = −∆UµF
for a conservative force F and the 4-vector Wµf for a non-conservative forces f ,
with Wµ = WµF +Wµ
f –, from the Asynchronous Formulation and the 4-vector
Qµ, characterised through the 4-vector ∆UµB of the system B∞ (heat reservoirdescribed as an ensemble of quantum oscillators): ∆Uµ = Wµ +Qµ.
In this formalism, we solve the exercise of a block pulled by a conservativeforce and against a friction force first in privileged frame S∞ in which the floor,the electric field responsible for the conservative force and heat reservoir areat rest, and then in frame SA in standard configuration with respect to S∞.Assuming that an observer in standard configuration obtains its own mea-surements according to a relativistic transformation of different magnitudes,displacements, velocities, forces, etc., it is possible to obtain a coherent, andequivalent, description of the process in both frame S∞ and frame SA.
Classical limit. In S0 relativistic equations Impulse-Momentum Eq. (14),Energy Eq. (15), Centre-of-Mass Eq. (16) and Heat Eq. (17),
in the limit c→∞ with: limc→∞ γ(v)v → v ; limc→∞ [γ(v)− 1] c2 → v2/2,the corresponding Newtonian-Galilean description of the process described inFig. 1 (MZ ≡ m) is obtained:
mvf = (qE − µmg) t0 ; (35)
1
2mv2f = qEL+Q ; (36)
1
2mv2f = (qE − µmg)L ; (37)
Q = −µmgL ; . (38)
18

1. Eq. (35) (Impulse-Momentum Equation) is obtained from Newton’s Sec-ond Law applied to Z. Every force applied to Z is included, throughresultant force F = qE − µmg, in this equation.
2. Eq. (36) is the corresponding First Law of Thermodynamics ([1], p. 194)or Energy Equation (Law of Conservation of Energy):
∆Kcm + ∆U = W +Q ,
applied to the process taken on Z [34, 35], with ∆U = 0 (isothermalprocess). Only the external conservative force F = qE applied to Zactually do work.
3. Eq. (37) is the corresponding Centre-of-Mass Equation which can beobtained considering that ([36], p. 1063):
d[v2/2]
d[v]= v =
(F/m) dx
(F/m) dt.
With constant mass m and force F and from Eq. (35) one obtains that:
m
[v2f2− v2i
2
]= F ∆x ,
for a finite process ([13], pp. 359, 361).
4. Thermal effects in this process can be described by comparison betweenEq. (36) (Energy Equation) and Eq. (37) (Centre-of-Mass Equation),with:
Q = ∆Kcm −W = −µmgL .
This Eq. (38) completes the energy balance for the process describedin Fig. 1 showing that mechanical energy dissipation equals ‘dissipativeforce f -centre-of-mass displacement L product’. Heat is the difference(mechanical energy dissipated) between work done on body Z and itsincrement in kinetic energy.
En SA, the corresponding Impulse-Momentum Eq. (24), Energy Eq. (25),Centre-of-Mass Eq. (31) and Heat Eq. (34), in the limit c→∞:
m (vf − V )−mV = qEt0 − µmgt0 ; (39)
1
2m (vf − V ) c2 − 1
2mV 2 = qE (L− V t0)− µmgV t0 +Q ; (40)
1
2m (vf − V ) c2 − 1
2mV 2 = (qE − µmg) (L+ V t0) ; (41)
Q = −µmgL , (42)
the corresponding Newtonian-Galilean description is obtained. In this classicallimit the Principle of Inertia of Energy does not apply, and the energy termsthat enter in Impulse-Momentum equation are divided by c2 and vanish.
19

When the exercise is solved in the privileged frame S∞ (Asynchronous For-mulation) using 4-vector equations and the corresponding magnitudes in SA
are obtained through relativistic transformation or the corresponding 4-vectorin SA are obtained through Lorentz transformation, then the correspondingclassical equations both in S0 and SA are obtained in the limit c→∞. Obvi-ously, the vice-verse is not true. For instance, in S0, the force f = µmg doesnot do work because its displacement is null in B∞; but this force has a dis-placement −V t0 in SA, doing work (‘product force-displacement’ no null), thatmust be take into account in the corresponding SA energy equation. In the4-vector equations description and with the Lorentz transformation, this workcontribution to energy equation in SA is automatically taking into account. Inthe original classical description this work contribution of f in SA can not beforgotten and must be incorporated by hand into the energy equation [8].
Non-friction limit. In the non-friction limit (with non-conservative forcef = 0), with (for an infinitesimal process) δQµ = 0, we obtain that dUµ =δWµ, with:
dUµ ={cMZd [γ(v)v] , 0, 0, c2MZd [γ(v)]
}; v ≡ vcm
δWµ = {cFdt, 0, 0, Fdx} ;x ≡ xcm .
Taking into account that:
dpµ = c−1dUµ = {MZd [γ(v)v] , 0, 0, cMZd [γ(v)]}δWµ
dτ= cFµ = c
{γ(v)F, 0, 0, c−1γ(v)Fv
};
dt
dτ= γ(v) ,
where pµ is the 4-vector momentum ([11], p. 237), (where τ is the proper timeof block Z) one obtains:
c−1dUµ
dτ= c−1
δWµ
dτ→ dpµ
dτ= Fµ .
This is the well known equation for the Relativistic Newton Second Law ([7],p. 618), in which:
dpµ
dt= γ−1(v)Fµ .
This equation allows one to write in frame S∞ (F = qE , a0 = qE/MZ):
MZd [γ(v)v] = qE dt ,
MZc2d [γ(v)] = qE dx .
The same equations are valid for an extended rigid body with inertia MZ
than for a point particle with mass m, a result according to the Principle ofSimilitude.
Minkowski’s 4-vector Special Theory of Relativity formalism has not beenused in physics pedagogical literature with the extension and depth that such
20

a versatile and poweful formalism deserves. Although Einstein’s Relativityhas been relegated to exercises involving bodies at near the speed of light, itsformalism can be applied with great advantage to low speed processes too [37].The appearance of a relativistic (Einstenian) effect (for instance, the relativenature of simultaneity) does not depend on the use of a large relative speed ofthe two reference frames, but only on sufficient precision in the specificationof time ([38], p. 518).
Minkowski’s 4-vector formalism provides mathematical tools and skills anda physics internal logic that allows students with both Thermodynamics andRelativity courses, to systematically address the resolution of any exercise ofClassical Physics, particularly those on the border between mechanics andthermodynamics.
Although at first sight the formalism developed in this article may seemmore complicated than the classic development based separately on the Sec-ond Law of Newton and the First Principle of Thermodynamics (didactic andpedagogical) advantages of this completely Lorentz invariant approach for Me-chanics, Thermodynamics and Electromagnetism are:
1. In Classical Thermodynamics internal energy function U is never defined.In a relativistic description, the definition of the 4-vector energy functionUµ – the corresponding relativistic internal energy – must be provided,based on the Einstein’s equation interpretation for an extended body.
2. For a conservative force F , the 4-vector work WµF is obtained from the
relativistic electromagnetic formalism.
3. For a non-conservative force f , the 4-vector work Wµf is obtained in a
different way. In frame S∞ a non-conservative force has associated nodisplacement, its ‘force-displacement product’ is zero (does not work)and the 4-vector associated to this kind of force presents a temporalcomponent null.
4. Heat is characterised in frame S∞ as a 4-vector associated to an ensembleof phonons with null total momentum. This assumption ensures thatenergy interchanged as heat provides the maximum increment in entropyof the universe for a given amount of interchanged energy, according tothe Second Law of Thermodynamics.
5. Equations are expressed with 4-vectors and so they are Lorentz invariant.Writing a physics law in Minkowski’s 4-vector notation, integrating spaceand time, highlights their invariance, simplified the formalism and favourcalculations.
6. With a single equation, the Relativistic Thermodynamics First Principle,are described processes of conservation or dissipation (friction) of me-chanical energy. The Relativistic Impulse-Momentum Equation (SecondLaw of Newton) and the Relativistic Energy Equation (First Principle)are simultaneously derived using this principle.
21

7. The relativistic Centre-of-Mass Equation can be obtained by integratingthe corresponding Impulse-Momentum Equation, showing that it is notan energy equation. In the limit of non-dissipation, the same formal-ism provides both relativistic Impulse-Momentum and Centre-of-Massequations.
8. Classical Physics exercises like that given in Fig. 2 can be solved using afully Lorentz covariant formalism that includes Mechanics, Thermody-namics and Electromagnetism 4-vector magnitudes.
A Energy function
e
p
n
N
ν
ν
A
U~
.
.
.
.
.
.
U~
N
N
AU~
C
A
νC
C
T=0
Figure 4: Crystal (C) formation from its elementary particles –protons (p),neutrons (n) and electrons (e) –. When the nucleus (N) is assembled, NN
photons with frequency νN are emitted and (negative) energy UN is released.When the atom (A) is assembled from the nucleus and electrons, NA photonswith frequency νA are emitted and (negative) energy UA is released. When thecrystal is assembled, at temperature T = 0 K, NC photons with frequency νCare emitted and (negative) energy UC is released. Every ensemble of photonsis emitted with zero total momentum.
Body Z is composed by NA atoms of element ZNA in a crystal. Every atomis considered as an oscillator with angular frequency ωZ (Einstein solid model).The zero-point (T = 0 K) energy of every oscillator (one-dimensional model)is considered E0 = 0 after subtracting off the thermodynamically uninterest-ing zero-point energy (E0 = hωZ/2) [39]. Body Z energy function U(T0) atabsolute zero temperature T = 0 K is given by (Fig. 4):
U(T0) = NAu0 − U ;
u0 = N (mp +me) c2 + (Z −N)mnc
2 ,
U =∣∣∣UN
∣∣∣+ ∣∣∣UA
∣∣∣+ ∣∣∣UC
∣∣∣ ,where mp, me and mn are proton, neutron and electron mass, respectively, andU is (negative) body Z formation energy, or energy released when the body
22

is formed from its elementary particles, with UN as energy nucleus (defect ofmass), UA atom energy and UC crystal energy formation, respectively ([40],pp. 489-491).
T
T=0
T
SZ
(i)
(f)
Figure 5: (i) Block Z is an Einstein solid with NA oscillators, with angularfrequency ωZ, initially at temperature T = 0. (ii) After diathermal contactwith heat reservoir B∞, with N ≈ ∞ oscillators with angular frequency ωB, attemperature T , block Z achieves temperature T . Every oscillator in Z has thesame n ≡ nZ(T ) number of phonons (this number depends on temperature).
Taking into account that dU = TdS−PdV, with coefficients (∂S/∂T )P =NAcP , (∂V/∂T )P = αV, where cP (T ) is the body’s (solid) heat capacity, peratom, at constant pressure and α(T ) is its (solid) thermal expansion coefficient,both coefficients being temperature dependent ([41], Chap. 13), one has: dU =NAcP (T )dT − Pα(T )dT . At temperature T , and under constant pressure P ,energy function U(T ) depends on temperature as:
U(T ) = U(T0) +NA
∫ T
0cP (T )dT − PV0
∫ T
0α(T )dT ,
where V0 is body Z volume at temperature T = 0 K. Part of the energy pro-vided to Z in its increasing temperature process is wasted into expansion workagainst the external pressure, and does not contribute to Z energy function.Assuming that coefficient α(T ) ≈ 0,
U(T ) ≈ U(T0) +NA
∫ T
0cP (T )dT .
For simplicity [17] one assumes that every oscillator has the same numberof phonons [42] nZ(T ), with nZ(T ) ≈
∫ T0 cP (T )dT/hωZ . Function energy U(T )
for Z at temperature T is then:
U(T ) = NAu0 −∣∣∣U ∣∣∣+NAnZ(T )hωZ .
A block at a high temperature has more inertia than the same block at a lowertemperature. Energy function contribution c−2 [NAnZ(T )hωZ] has no measur-able experimental effect on the body’s inertia because the term U = NAu0,is several orders of magnitude larger than the temperature dependent term,
23

with nZ(T )hωZ/u0 � 1.
Thermodynamics introduced the concept of internal energy, a quantitywhose absolute magnitude is not defined, but whose changes are considered inmany relationships. It now appears that the best expression for a solid totalinternal energy (energy function) is U(T ) ([43], p. 17).
B Relativistic force and work
A conservative force F characterisation is achieved in Newtonian Mechanicsin two steps: providing the vector ~F = (F, 0, 0), applied during time intervaldt, with impulse δIF = Fdt, and noting that this force does an infinitesimalwork δWF = Fdx when applied along displacement dx.
For an electric field ~E = (E , 0, 0), and no magnetic field, ~B = (0, 0, 0), the4× 4-tensor Eµν is given by ([12], p. 1219):
Eµν =
0 0 0 E0 0 0 00 0 0 0E 0 0 0
.
Body Z (instantaneous) velocity in S∞ is characterised by the 4-vectorvelocity vµ, given by
vµ =dxµ
dτ= γ(v) {v, 0, 0, c} ,
where dxµ = {dx, 0, 0, cdt} is the 4-vector displacement and τ is body Zproper time (Fig. 2), with dτ/dt = γ−1(v), where dt is the corresponding timeinterval measured in frame S∞ [11]. For a (rigid) block, the correspondingvelocity for every conservative force F is v ≡ vcm, (every conservative forceapplied on Z has identical proper time τ), and displacement, dx ≡ dxcm. The4-vector Fµ is given by equation ([11], p. 280) Fµ = c−1qEµν vν :
Fµ = c−1q
0 0 0 E0 0 0 00 0 0 0E 0 0 0
γ(v)v
00
γ(v)c
=
γ(v)qE
00
γ(v)c−1qEv
. (43)
For a conservative force F an infinitesimal 4-vector work δWµF is defined
as: δWµF = qEµν dxν ([12], p. 1220):
δWµF = q
0 0 0 E0 0 0 00 0 0 0E 0 0 0
dx00cdt
=
cqEdt
00
qEdx
. (44)
24

The corresponding 4-vector Minkowski’s force Fµ, is obtained by deriving the4-vector work δWµ
F with respect to Z proper time dτ :
Fµ = c−1δWµ
F
dτ,
with:
Fµ = c−1δWµ
F
dt
dt
dτ= γ(v)
{qE , 0, 0, c−1qEv
}.
This obtention of the 4-vector Minkowski’s force Fµ shows that δWµF is itself
a 4-vector.
C Thermal energy
B8
B8
Z
(i)
(f)
vi
vf
S 8
Figure 6: Heat reservoir B∞ (Fig. 5). (i) There are N oscillators in the firstlayer of B∞, in diathermal contact with Z. Initially, every oscillator in thislayer is in its zero-point state. They absorb mechanical energy dissipatedduring the friction process. (f) At the end of the process, oscillators in thefirst layer of B∞ are in thermal equilibrium at temperature T , with nB(T )phonons per oscillator. Body Z temperature remains constant.
In order to simplify the description, we assume that the interchange of heat[44] between Z and B∞ is quick enough to ensure that body Z temperatureremains constant (and Z properly behaves as a rigid solid). When body Zabsorbs energy and increases its temperature, this excess of energy will (almostimmediately) be transferred to B∞.
In our description, system B∞ will play the role of a thermal bath. It willbe described as an Einstein solid ([45], pp. 251-255) (Fig. 6), with NB ≈ ∞oscillators, any of them with angular frequency ωB. It is assumed that for agiven temperature T there are the same number of phonons nB ≡ nB(T ) peroscillator [46].
Transfer of radiation between an object and a radiation field in equilibriumwith the object [47] [a cavity filled with thermal radiation ([12], p. 1220-1222)]
25

is energy transferred as heat ([48], pp. 266-267). Considering similitudesbetween photons and phonons ([49], Chap. 6) energy interchanged as heatbetween Z and B∞ will be treated as an assembly of phonons in the first layeroscillators of B∞, initially in their zero-point [Fig. 6 (i)]. As a consequence ofthis friction interaction with body Z, heat reservoir B∞ will increase in nB(T )its number of phonons per oscillator in its N first layer oscillators [Fig. 6 (f)].
References
[1] R A Serway, J W Jewett, Jr. Principles pf Physics. A Calculus-BasedText, 3rd Ed. Harcourt College Publishers, Orlando 2002
[2] D Halladay, R Resnick, J Walker, Fundamentals of Physics, 6th Ed. JohnWiley and Sons, New York 2001
[3] J M Knudsen, P G Hjorth, Elements of Newtonian Mechanics. IncludingNonlinear Dynamics, Springer Heidelberg 2000
[4] B Arne Sherwood and W H Bernard, Work and heat transfer in the pres-ence of sliding friction, Am. J. Phys. 52, 1001-1007 (1984)
[5] A B Arons, Developing the energy concepts in introductory physics, Phys.Teach. 27, 506-517 (1989)
[6] J W Jewett, Jr, Energy and the Confused Student V: The en-ergy/momentum approach to problems involving rotating and deformablesystems, Phys. Teach. 46, 269-274 (2008)
[7] O D Jefimenko, Derivation of relativistic force transformation equationsfrom Lorentz force law, Am. J. Phys. 64, 618-620 (1996)
[8] I Galili, D Kaplan, Extending the application of the relativity principle:Some pedagogical advantages, Am. J. Phys. 65, 328-335 (1997)
[9] J W Jewett, Jr Energy and the Confused Student I: Work, Phys. Teach.46, 38-43 (2008)
[10] R C Hilborn, Let’s ban Work from Physics Phys. Teach. 38 447 (2000)
[11] J Freund, Special Relativity for Beginners. A Textbook for Undergradu-ates, World Scientific, Singapore 2008
[12] J Guemez, An undergraduate exercise in the first law of relativistic ther-modynamics, Eur. J. Phys. 3 1209-1232 (2010)
[13] A. J. Mallinckrodt, H. S. Leff, All about work, Am. J. Phys. 60, 356-365(1992)
[14] W G V Rosser, Introductory Special Relativity, Taylor and Francis, Lon-don, 1991
26

[15] R R Hart, Relativistic Rigid Bodies and the Uncertainty Principle, Am.J. Phys. 33 1006-1007 (1965)
[16] C M L Leonard, The relativistic classical increase of energy and angularmomentum with rotation, Am. J. Phys. 52, 527-531 (1984)
[17] S J Blundell and K M Blundell, Concepts in Thermal Physics, 2nd Ed.Oxford University Press, New York 2010
[18] J Franklin, Lorentz contraction, Bell’s spaceships and rigid motion inspecial relativity, Eur. J. Phys. 31 291-298 (2010)
[19] Eugene Hecht, On Defining Mass, Phys. Teach. 49 40-44 (2011)
[20] S Banerji, A Banerjee, The Special Theory of Relativity, PHI Leraning,New Delhi 2008
[21] R Baierlein , Does nature convert mass into energy?, Am. J. Phys. 75,320-325 (2007)
[22] Rindler W 2006 Relativity. Special, General, and Cosmological, 2nd Ed.Oxford University Press, New York
[23] J T Cushing, Vector Lorentz transformations, Am. J. Phys. 35, 858-862(1967)
[24] A Gamba, Physical Quantities in Different Reference Systems Accordingto Relativity, Am. J. Phys. 35, 83-89 (1967)
[25] G Cavalleri, G Salgarelli, Revision of the relativistic dynamics with va-riable rest mass and application to relativistic thermodynamics, NuovoCimento 42, 722-754 (1969)
[26] N G van Kampen, Relativistic Thermodynamics J. Phys. Soc. Japan 26Supplement 316-321 (1969)
[27] G M Barrow, Thermodynamics should be built on energy-not on heat andwork, J. Chem. Educ. 65,122-125 (1988)
[28] U Besson, Work and energy in the presence of friction: the need for amesoscopic analysis, 22, 613-622 (2001)
[29] H. S. Leff, A. J. Mallinckrodt, Stopping objects with zero external work:Mechanics meets thermodynamics, Am. J. Phys. 61, 121-127 (1993)
[30] C Swartz, Back-of-the-Envelope Physics, Johns Hopkins University Press,Baltimore (2003)
[31] J Ringlein, M O Robbins, Understanding and illustrating the atomic ori-gins of friction, Am. J. Phys. 72 884-891 (2004)
27

[32] M Tsamparlis, Special Relativity. An Introduction with 200 Problems andSolutions, Springer Berlin 2010
[33] D E Fahnline, Parallels between relativistic and classical dynamics forintroductory courses, Am. J. Phys. 43, 492-495 (1975)
[34] H Erlichson, Internal energy in the first law of thermodynamics, Am. J.Phys. 52, 623-625 (1984)
[35] J W Jewett, Jr Energy and the Confused Student IV: A global approachto energy, Phys. Teach. 46, 38-43 (2008)
[36] A B Arons , Development of energy concepts in introductory physicscourses, Am. J. Phys. 67, 1063-1067 (1999)
[37] R Baierlein, Two myths about special relativity, Am. J. Phys. 74 193-195(2006)
[38] W H Furry, Lorentz transformation and the Thomas Precession, Am. J.Phys. 23 517-525 (1955)
[39] K P. W. Milonni and M. -L. Shih, Zero-point energy in early quantumtheory, Am. J. Phys. 59, 684-698 (1991)
[40] E Hecht, An Historico-Critical Account of Potential Energy: Is PE ReallyReal?, Phys. Teach. 41, 486-493 (2003)
[41] M W Zemansky, R H Dittman, Heat and Thermodynamics: An Interme-diate Textbook, 7th Ed., McGraw-Hill International Editions (1997)
[42] C E Mungan, Chemical potential of the one-dimensional simple harmonicoscillators, Eur. J. Phys. 30 1131-1136 (2009)
[43] Robert L. Lehrman , Energy Is Not The Ability To Do Work, Phys. Teach.11, 15-18 (1973)
[44] R H Romer, Heat is not a noun, Am. J. Phys. 69, 107-109 (2001)
[45] F Reif, Fundamentals of Statistical and Thermal Physics, McGraw-Hill,Singapore 1985
[46] D. Shanks, Monochromatic Approximation of Blackbody Radiation, Am.J. Phys. 24, 244-246 (1956)
[47] M W Zemansky,The use and misuse of the word ’Heat‘ in physics teach-ing, Phys. Teach. 8 295-300 (1970)
[48] Robert P. Bauman, Physics that textbook writers usually get wrong. I.Work, Phys. Teach. 30, 264-269 (1992)
[49] R Baierlein, Thermal Physics, Cambridge University Press, CambridgeUK 1999
28