jorge omar morel - 2015 - transformaciones lineales b
DESCRIPTION
Álgebra y Geometría Analítica 1Facultad de IngenieríaUNAM ArgentinaTRANSCRIPT
TRANSFORMACIONES LINEALESÁlgebra Lineal y Geometría Analítica para
estudiantes de Ingeniería
Parte B.2
Jorge Omar Morel
edición 2015

no escribir nada
nada
TRANSFORMACIONES LINEALES
Álgebra lineal y Geometría analítica para
estudiantes de ingeniería
Parte B.2
Jorge Omar Morel
FACULTAD DE INGENIERÍA
Universidad Nacional de Misiones
(UNaM)
Morel, Jorge Omar
Transformaciones lineales : álgebra lineal y geometría ana-lítica
para estudiantes de ingeniería. Parte B.2 2015 . – 1a ed. –
Oberá : Jorge Omar Morel, 2015.
278 p. : il. ; 18x25 cm.
ISBN 978-987-33-8237-6
1. Matemática. 2. Enseñanza Universitaria. I. TítuloCDD 510.711
nada
Fecha de catalogación: 21/07/2015
ISBN 978-987-33-8237-6
Impreso en Argentina
2015 Jorge Omar Morel.
Esta obra está licenciada bajo la Licencia Creative Com-mons Atribución-NoComercial-CompartirIgual 4.0 Inter-nacional. Para ver una copia de esta licencia, visitahttp://creativecommons.org/licenses/by-nc-sa/4.0/.
Oberá – Misiones, 2015
Prólogo
Esta obra comprende una selección de contenidos de Álgebra Lineal y Geo-metría Analítica para el primer año de las carreras de ingeniería del país. És-tos corresponden básicamente a una visión de lo mínimo que un estudiante deingeniería debería equiparse en primer año para poder aprovechar mejor loscursos posteriores en la carrera. Y se desarrolla en 4 partes.
Parte A.1
• Puntos y Vectores.
• Matrices y Determinantes.
• Sistemas de Ecuaciones Lineales.
Parte A.2
• Rectas y Planos.
• Secciones Cónicas.
• Superficies Cuádricas y Regladas.
Parte B.1
• Espacios Vectoriales.
• Combinaciones lineales y Espacio generado.
• Bases y Cambios de Base.
Parte B.2
• Transformaciones Lineales y Matrices Asociadas.
• Autovalores y Autovectores – Diagonalización.
• Aplicaciones.
Tienes un libro que he intentado te sea de más ayuda —en este materialmantenemos un estilo coloquial, con abundante ejemplificación y ejerciciosresueltos, mientras que el contenido mismo se presenta en forma detallada,tratando de no resignar precisión— que un libro de texto normal. La calidadde los gráficos es profesional y en colores; si hubiera algún inconveniente enla versión impresa, puedes solicitarme ([email protected]) los archivosen formato electrónico. Una de las finalidades del libro es que te habilite paraque puedas leer sin problemas un libro de texto dedicado a las matemáticas oa las ingenierías.
v

Para cada capítulo existe un apéndice al final, donde ahondamos en detalleso agregamos contenidos. Espero que sirvan como incentivo para cuando hayasalcanzado cierta madurez, o como material de re-lectura una vez aprobadoel curso. Te animo a que leas un apéndice recién después de haber leído elcapítulo al cual correspondiera.
Los contenidos que aparecen en otras asignaturas y son citadas en estosapéndices, han sido reducidos al máximo posible.
Un apéndice —H— está dedicado a ejercitación, y corresponde una secciónpor cada capítulo. En la sección H-7 hay un ejemplo de examen y experienciacompartida con otros docentes.
La notación general ha sido cuidadosamente elegida. Es probable que éstadifiera con algunos libros de texto, pero con relación a sí misma he tratadoque sea coherente entre todas sus partes.
El capítulo 1 contiene una revisión de espacios vectoriales y trata de tra-bajar nuevamente el concepto de recta y plano desde ese punto de vista, quemas adelante, cuando en el capítulo 3 realicemos rotaciones de rectas y planosno se haya perdido la familiaridad con aquellos conceptos. Es muy importanteque revises el material de trayectorias.
Los capítulos 2 y 3 presentan el nudo de las transformaciones lineales:cómo verificarlas, sus propiedades; y además contienen una referencia a lastransformaciones no lineales. En particular en su apéndice (A), donde hace-mos los mapeos de caminos cerrados en el plano, tanto para transformacio-nes lineales cuanto para algunas transformaciones no lineales. El Cap.4 versasobre los autovalores y autovectores de las matrices cuadradas de entradasreales, considerándolas como matrices asociadas a transformaciones linealesen un mismo espacio.
En el capítulo 5 trabajamos sobre la diagonalización de matrices cuadra-das, para terminar con los cambios de base que dan como resultado matricesasociadas diferentes para una misma transformación lineal. Finalmente en elcapítulo 6 se aplican los conceptos a la diagonalización de cónicas y cuádricas.
viJOM - Transformaciones Lineales
Objetivos —Parte B.2—
1. Objetivos generalesPoner a disposición una herramienta matemática que permite tratar re-laciones funcionales entre objetos diferentes .Manejar conceptos de función entre espacios vectoriales, Aplicaciones:Rotaciones y Traslaciones en el espacio, Conectar la teoría de las matri-ces con la de las transformaciones lineales y afines.Proporcionar demostraciones sencillas, manejar la notación formal.
2. Objetivos particulares por tema
Capítulo 1: Planos y rectas a la luz de los espacios vectorialesSe trata de un repaso (revisita) a un tema que normalmente aparece 9semanas atrás. Ponemos como recurso lo estudiado de los espacios vec-toriales para integrar conceptos anteriores.
Capítulo 2: Transformaciones linealesDefinimos lo que es una transformación. Aprendemos a detectar las queson lineales. A las lo son, las caracterizamos a través de una matriz aso-ciada. Esto trae como consecuencia poder utilizar el álgebra matricial.De este modo todo lo que has estudiado de espacios vectoriales es «ma-teria prima» para trabajar con este contenido.
Capítulo 3: Transformaciones lineales isométricasEstudiamos más detenidamente una clase de transformaciones lineales,en las que los transformados conservan la norma —es necesario definiruna distancia en el espacio vectorial—. Especial tratamiento daremos alas rotaciones en R2 y R3 . La revisión del capítulo 1 funciona como refe-rencia para la operatoria necesaria en esta unidad.
Capítulo 4: Valores y vectores propiosComo las transformaciones lineales pueden caracterizarse mediante lasmatrices asociadas, corresponde un estudio un poco más detallado de laspropiedades de éstas.Básicamente los autovalores y autovectores son propiedades fundamen-tales de las matrices cuadradas. Asimismo se desarrolla el concepto dematriz similar. A pesar de que se evitan los autovalores complejos —que cobrarán importancia cuando se utilice el mismo tema para estu-diar por ejemplo las ecuaciones diferenciales o a diferencia de sistemasdinámicos—, porque el enfoque privilegia las aplicaciones relacionadascon la geometría, hay algunos esbozos por tenerlos presente.Desarrollamos el concepto de similaridad pero que lleva a la matriz a serdiagonal —o de Jordan—. Como todo concepto nuevo es necesario darlebastante importancia, sobretodo porque se lo utiliza mucho en todas lasramas de la ingeniería.
Capítulos 5 y 6: Diagonalización y aplicación al cambio de base
JOM - Transformaciones Lineales
vii
En este caso particularizamos el contenido de la unidad anterior aplican-do ese concepto a las transformaciones lineales. Es también una aplica-ción concreta de los cambios de base que se estudiaron en el marco delos espacios vectoriales.La particularidad es que ahora las matrices asociadas no son únicas paracada transformación lineal, sino que dependen de qué bases están invo-lucradas en uno y otro espacio vectorial.Respecto de la canonización, es una de las aplicaciones de toda la teoríaanterior. Por estar relacionada con los conceptos geométricos de las có-nicas y cuádricas, es un tema que cierra el proceso de estudio de la obra,aunque hayamos dejado afuera otras posibilidades.
viiiJOM - Transformaciones Lineales
Dedicatoria y Agradecimientos
a mis tías, Rosa y AngélicaNo hacen falta consejos cuando hay Amor.
Agradecimientos :
a mi familia: por los fines de semana sin papá
a mis ex-alumnos: por los constantes aportes ypor «bancarse» las versiones preliminares
Agradecimientos Especiales :
al ing. Carlos Wüst, por animarme y escribir la guia base
a mis alumnos, en particular Brenda Antonella Herda y Sergio Ariel Pachecopor la revisión final de la edición 2014, pero a todos aquellos que hancolaborado indicando las partes oscuras, o señalando inconvenientes.
JOM - Transformaciones Lineales
ix
xJOM - Transformaciones Lineales
Tabla de contenidos
1. Planos y rectas mediante espacio vectorial 1
1-1. Repaso de espacios vectoriales . . . . . . . . . . . . . . . . . . . . 2
1-2. Ecuaciones de la recta . . . . . . . . . . . . . . . . . . . . . . . . . 4
1-3. Ecuaciones del Plano . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1-4. Repaso de segmentos y cónicas . . . . . . . . . . . . . . . . . . . . 13
2. Transformaciones Lineales 21
2-1. Transformaciones o morfismos . . . . . . . . . . . . . . . . . . . . 22
2-2. Transformaciones lineales . . . . . . . . . . . . . . . . . . . . . . . 25
2-3. Matriz asociada a una transformación lineal . . . . . . . . . . . . . 33
2-4. Matriz asociada a operaciones con Transformaciones lineales . . 40
3. Transformaciones lineales isométricas 45
3-1. Isometrías . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3-2. Rotación en el plano . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3-3. Rotaciones en el espacio . . . . . . . . . . . . . . . . . . . . . . . . 53
4. Autovalores y Autovectores 59
4-1. Introducción: Mapeo en el plano . . . . . . . . . . . . . . . . . . . 60
4-2. Autovalores y Autovectores . . . . . . . . . . . . . . . . . . . . . . 63
4-3. Matrices similares . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
5. Diagonalización de matrices y Aplicación al cambio de bases 83
5-1. Diagonalización de Matrices . . . . . . . . . . . . . . . . . . . . . . 84
5-2. Matrices simétricas . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5-3. Cambios de base en TL . . . . . . . . . . . . . . . . . . . . . . . . . 92
6. Aplicaciones 101
xi
Tabla de contenidos Tabla de contenidos
6-1. Vector mediante su matriz de Coordenadas . . . . . . . . . . . . . 102
6-2. Secciones Cónicas y superficies cuádricas . . . . . . . . . . . . . . 103
6-3. Canonización de Cónicas . . . . . . . . . . . . . . . . . . . . . . . . 104
6-4. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
6-5. Canonización de cuádricas . . . . . . . . . . . . . . . . . . . . . . . 119
A. Mapeos de trayectorias en el plano 129
A-1. Circunferencia y cuadrado unitarios . . . . . . . . . . . . . . . . . 129
B. Más sobre mapeos lineales 135
B-1. Ley dada mediante del mapeo de una base . . . . . . . . . . . . . 135
B-2. Núcleo e imagen de una TL . . . . . . . . . . . . . . . . . . . . . . 138
B-3. Relaciones entre los sistemas lineales y las transformaciones li-neales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
B-4. Traslaciones «matricializadas» . . . . . . . . . . . . . . . . . . . . 143
B-5. Guión de figura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
C. Más sobre Isometrías 147
C-1. Rotación alrededor de un punto que no es el origen de coordena-das en el plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
D. Mas sobre autovalores y autovectores 155
D-1. Teorema de Cayley-Hamilton . . . . . . . . . . . . . . . . . . . . . 155
D-2. Matrices relacionadas y sus pares autovalor-autovector . . . . . . 158
D-3. Método de Newton-Raphson (Raíces) . . . . . . . . . . . . . . . . . 163
E. Más aún sobre autovalores y autovectores 169
E-1. Aplicación de una transformación más de una vez . . . . . . . . . 169
E-2. Espacios invariantes . . . . . . . . . . . . . . . . . . . . . . . . . . 171
E-3. Base ortonormal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
F. Extras sobre aplicaciones 179
F-1. «Afinización» de cuádricas y cónicas . . . . . . . . . . . . . . . . . 179
F-2. Formas cuadráticas . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
F-3. Forma canónica de Jordan . . . . . . . . . . . . . . . . . . . . . . . 181
G. Transformaciones de la circunferencia 189
xiiJOM - Transformaciones Lineales

Tabla de contenidos Tabla de contenidos
G-1. Mapeos lineales de la circunferencia unitaria . . . . . . . . . . . . 190
H. Ejercitaciones 203
H-1.Rectas, Planos y Espacios Lineales . . . . . . . . . . . . . . . . . . 204
H-2.Transformaciones Lineales. Matriz asociada vs Ley . . . . . . . . 206
H-3. Isometrías en el Plano y el espacio . . . . . . . . . . . . . . . . . . 211
H-4.Valores y Vectores Propios de Matrices n× n . . . . . . . . . . . . 215
H-5.Cambios de Base y Transformaciones Lineales . . . . . . . . . . . 218
H-6.Canonización de Cónicas y Cuádricas . . . . . . . . . . . . . . . . 221
H-7.Ejemplo de examen . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
H-8.Una palabra para compartir con profesores . . . . . . . . . . . . . 225
JOM - Transformaciones Lineales
xiii

Tabla de contenidos Tabla de contenidos
xivJOM - Transformaciones Lineales
Capítulo 1
Planos y rectas mediante espaciovectorial
Resumen:
Empezamos con una revisita a estos temas —
repaso de lo que hemos desarrollado en la parte
B.1—; pero desde el punto de vista de los espacios
vectoriales. Es interesante ver que el espacio vec-
torial provee un marco donde lo aprendido hasta
ahora cabe si no perfectamente, adecuando algu-
nos pocos aspectos.
En este libro obtendrás una visión dual; los tra-tamos mediante la geometría, o bien mediante losespacios vectoriales.
Se trata de ver algunos aspectos de la geometríaanalítica usando las herramientas de los espaciosvectoriales. Para ello es necesario definir opera-ciones en estos espacios: el plano y el espacio tri-dimensional.
1
Capítulo 1. Planos y rectas mediante espacio vectorial 1-1. Repaso de espacios vectoriales
1-1.Repaso de espacios vectoriales . . . . . . . . . . . . . . . . . . . . 2
1-2.Ecuaciones de la recta . . . . . . . . . . . . . . . . . . . . . . . . . 4
1-2.1. Matriz de coordenadas de la recta . . . . . . . . . . . . . . 6
1-2.2. Distancia de la recta al origen . . . . . . . . . . . . . . . . 7
1-3.Ecuaciones del Plano . . . . . . . . . . . . . . . . . . . . . . . . . . 9
1-3.1. Matriz de coordenadas del plano . . . . . . . . . . . . . . 11
1-3.2. Distancia del plano al origen . . . . . . . . . . . . . . . . . 11
1-4.Repaso de segmentos y cónicas . . . . . . . . . . . . . . . . . . . . 13
1-4.1. Trayectorias con segmentos . . . . . . . . . . . . . . . . . 15
1-4.2. Combinaciones de arcos y segmentos . . . . . . . . . . . . 16
1-4.3. Trayectorias de arcos de cónica . . . . . . . . . . . . . . . 18
1-4.3.1. 1er método . . . . . . . . . . . . . . . . . . . . . . 19
1-4.3.2. 2do método . . . . . . . . . . . . . . . . . . . . . . 19
1-1. Repaso de espacios vectoriales
Un espacio vectorial es la estructura algebraica que posee un conjunto devectores V, en la que se define una operación llamada «suma de vectores +» ,y otra operación entre elementos de un cuerpo de escalares K y los vectoresde V llamado «escalamiento ·» ; además se cumplen diez axiomas.La estructura espacio vectorial (e.v.) se simboliza de la siguiente manera:
V = (V , +, K, · ) (1.1)
El K que aparece en la estructura del espacio (1.1) es a su vez, otra estruc-tura —el cuerpo K— que puedes simbolizar
K = (K, +, · ) (1.2)
La suma en el cuerpo (1.2) es la suma de escalares, y es en general distintaa la suma de vectores del espacio vectorial (1.1), así como el producto en (1.2)es entre escalares y el producto en (1.1) se refiere al (escalamiento) productoentre un escalar de K y un vector de V.
El conjunto V de un espacio vectorial (e.v.) puede contener diversos entesmatemáticos, como ser: puntos, matrices, funciones, sucesiones, polinomios,etcétera. V es el «conjunto subyacente» del e.v. V = (V , +, K, · ).
El cuerpo de escalares más común en este libro es el de los reales —K = R—, y además con la suma estándar entre reales y el producto estándarentre reales. Cuando eso ocurre, podemos decir que el e.v. V en la (1.1) es unespacio vectorial real y estándar. Y en ese caso —abusando de la notación—, asociar el espacio con el conjunto subyacente V = (V , +, R, · ) ≡ V. En
2JOM - Transformaciones Lineales

1-1. Repaso de espacios vectoriales Capítulo 1. Planos y rectas mediante espacio vectorial
particular, cuando decimos «el espacio R2» estamos hablando del espacioR2 = (R2, +, R, · ) donde las operaciones son las estándares.
Puedes caracterizar un espacio particular dando solamente una base deél, es decir un conjunto de vectores —matrices, funciones,. . . — linealmenteindependiente y generador de todo el espacio. En espacios n-dimensionales lacantidad de vectores en cualquier base es n. En otras palabras: una base esun conjunto. . . , pero no solamente un conjunto sino que el orden —en latíncanon— es muy importante, de modo que un conjunto B1 = {(1, 0) , (0, 1)} quees igual al conjunto B2 = {(0, 1) , (1, 0)}, no representan la misma base.
Cualquier vector del espacio puede representarse por su matriz de coorde-nadas sobre una base específica, y esta representación es única.
En el caso anterior la matriz de coordenadas1 del vector v = (2, 3) sobre
base B1 es [v]1 =
[2
3
]1
y sobre la otra, [v]2 =
[3
2
]2
. Recuerda que B1 así
definida es la base canónica de R2, por lo que en este caso puedes escribir
simplemente [v] =
[2
3
].
Para pasar de una representación respecto de una base u otra vale:
[v] = [B2] [v]2 (1.3)
donde [B2] representa la matriz de transición de la base B2 a la canónica, y suscolumnas son las matrices de coordenadas de cada uno de los vectores de labase B2 expresadas en base canónica.Nota la diferencia de notación entre la base Bi y la matriz [Bi].Para el caso del ejemplo, la base B2 = {b2,1 , b2,2} está compuesta por los vec-tores b2,1 = (0, 1) y b2,2 = (1, 0) ; por eso la matriz de transición de esa base a la
canónica es [B2] =[
[b2,1] [b2,2]]
=
[0 1
1 0
].
De esta forma puedes representar un vector en una base cualquiera —B2— sila conoces, y conoces las coordenadas del vector sobre otra base cualquiera—B1—, ya que [v] = [B2] [v]2 = [B1] [v]1, entonces
[ v ]2 = [B2 ]−1 [B1 ] [ v ]1= [B1 ]2 [ v ]1 (1.4)
Donde, lo puedes comprobar: [B1]2 = [B2]−11 . La matriz de transición [B2 ]1 de
la base B2 a la base B1 no es otra que la matriz de coordenadas de los vectoresde la base B2 expresadas en la base B1. Para el ejemplo que nos ocupa —el deR2—, [B2]1 =
[[b2,1]1 [b2,2]1
]. El pictograma de la figura 1.1 es una ilustración
de este hecho.
Los espacios vectoriales también son conocidos como espacios lineales.
1Para simplificar la notación usaremos solo el subíndice numérico y consecuentemente enesta obra, todas las bases las notaremos Bi .
JOM - Transformaciones Lineales
3
Capítulo 1. Planos y rectas mediante espacio vectorial 1-2. Ecuaciones de la recta
B1 B2
C
[v]
[v]1 [v]2
[B1]2
[B1] [B2]
vV
Figura 1.1: Repaso de cambio de bases
1-2. Ecuaciones de la recta
Podemos usar lo que sabemos de los espacios vectoriales con los temasque ya conocemos —rectas y planos—, para verlos desde una nueva manera.En este sentido te adelanto que una aplicación del último tema de este librose refiere al tratamiento de cuádricas en una posición general donde su ejefocal no es paralelo a ningún eje cartesiano. Este ejercicio es necesario paradarnos cuenta que las estructuras las podemos usar en cualquier contexto quelo amerite.
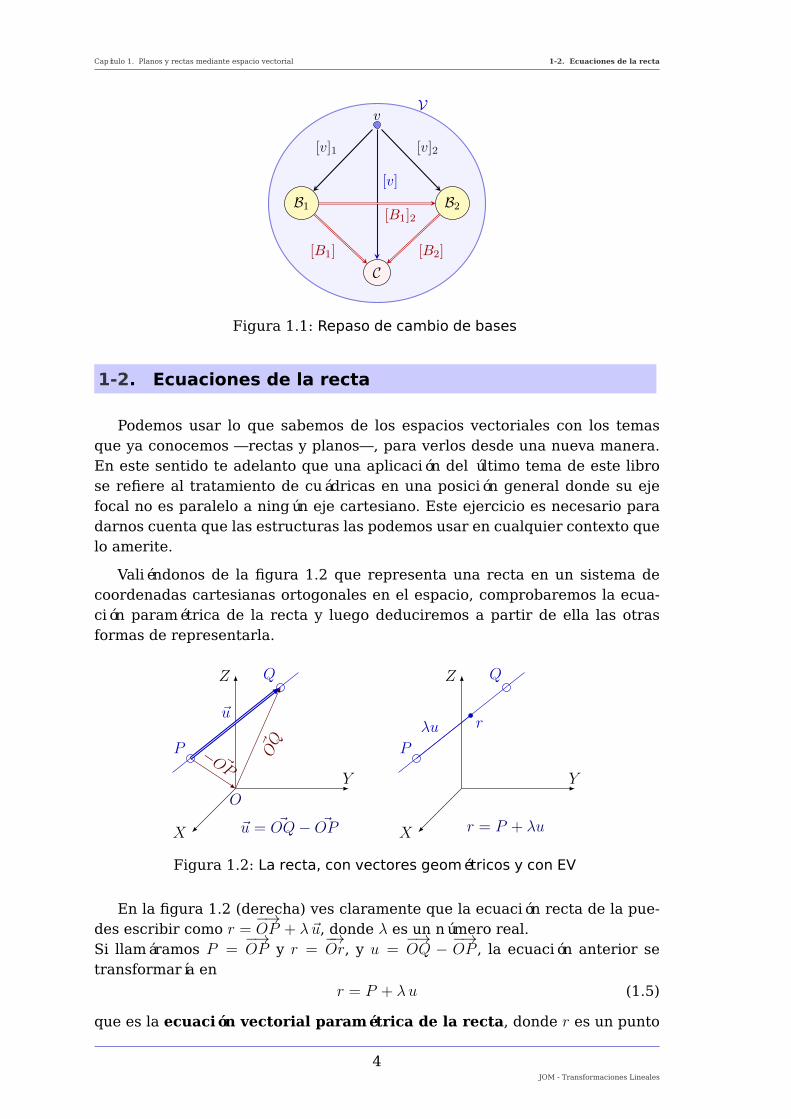
Valiéndonos de la figura 1.2 que representa una recta en un sistema decoordenadas cartesianas ortogonales en el espacio, comprobaremos la ecua-ción paramétrica de la recta y luego deduciremos a partir de ella las otrasformas de representarla.
X
Y
Z
P
Q
~u
~u = ~OQ− ~OP
O
− ~OP
~OQ
X
Y
Z
P
Q
rλu
r = P + λu
Figura 1.2: La recta, con vectores geométricos y con EV
En la figura 1.2 (derecha) ves claramente que la ecuación recta de la pue-des escribir como r =
−→OP + λ~u, donde λ es un número real.
Si llamáramos P =−→OP y r =
−→Or, y u =
−→OQ −
−→OP , la ecuación anterior se
transformaría en
r = P + λu (1.5)
que es la ecuación vectorial paramétrica de la recta, donde r es un punto
4JOM - Transformaciones Lineales

1-2. Ecuaciones de la recta Capítulo 1. Planos y rectas mediante espacio vectorial
cualquiera de la recta (un punto2 genérico de la recta), P y Q son puntos fijos3
de la recta.4.
La (1.5) es una ecuación paramétrica porque depende de un parámetro λ;y como todos los demás elementos (r, P, u) son vectores del espacio vectorialreal y estándar R3 en la figura 1.2, aunque sirve también para otros espacios5.
Una palabrita tenemos que decir de u: este «vector» es un punto cuyadirección a partir del origen, es la dirección de la recta. Recuerda que paralos espacios vectoriales del tipo R3 los vectores o elementos del espacio sonpuntos. El concepto de vector geométrico está superado.
Para pasar a las ecuaciones cartesianas paramétricas sólo debemos teneren cuenta que los vectores tendrán las siguientes coordenadas en el espacio ybase canónica —o estándar, en algunos libros—.
[r] =
x
y
z
, [P ] =
x1y1z1
, [u] =
u1u2u3
(1.6)
por lo que ingresando en la (1.5) las (1.6), tenemosx = x1 + λu1y = y1 + λu2z = z1 + λu3
(1.7)
que es la ecuación cartesiana paramétrica de la recta
Para pasar de las ecuaciones paramétricas a las ordinarias, usamos la (1.7)y eliminamos el parámetro λ. Suponiendo uj 6= 0 tenemos
λ =x− x1u1
=y − y1u2
=z − z1u3
(1.8)
que se conoce como la ecuación segmentaria de la recta, o ecuación ordi-naria de la recta en el espacio. Claramente se ve que uj son las componentesde un punto cuya dirección al origen es paralela a la recta, y que los tres jun-tos no pueden ser cero.6
Pero si alguno lo fuera, por ejemplo u1 = 0, la recta se escribiríay − y1u2
=z − z1u3
con x = x1 y es una recta paralela al plano YZ.
Si dos lo fueran, —por ejemplo u1 = u2 = 0—, la ecuación de recta se escribiría
z = z con
{x = x1y = y1
, que es una recta paralela al eje Z.
2 En realidad el vector «flecha» lo ponemos para beneficiarnos de la notación y recordarlo que hicimos en la geometría. Es el punto P quien es el vector del espacio vectorial.
3Puedes elegir dos puntos cualesquiera diferentes P y Q que yacen en la recta r, es decir:P 6= Q∧P,Q ∈ LGr, donde LGr denota el lugar geométrico de todos los puntos que la forman
4Escribimos vectores con letra minúscula expresando que son variables, y vectores conmayúscula para dar a entender que son fijos —aunque no los conozcamos—.
5Si la ecuación la usáramos en Rn con n > 3, podríamos hablar de una recta en un «hiper-plano» .
6Equivale a escribir |u1|+ |u2|+ |u3| 6= 0
JOM - Transformaciones Lineales
5

Capítulo 1. Planos y rectas mediante espacio vectorial 1-2. Ecuaciones de la recta
1-2.1. Matriz de coordenadas de la recta
Podemos escribir las rectas mediante la «matriz de coordenadas» de unpunto genérico de ellas.Para ver esto tomemos un ejemplo en R2, r : y = 2x + 1. Claramente el lugargeométrico de esta recta puede expresarse como {(x, 2x+ 1)}, la matriz de
coordenadas del vector genérico sobre base canónica de R2 es
[x
2x+ 1
]. Por
tanto la recta misma la puedes escribir como [r] =
[x
2x+ 1
]y la notación es
evidente. Se trata de una recta cuya primera coordenada es libre y la segundadepende de la primera (confirma que el grado de libertad es uno).
Veamos cómo pasar de la forma (1.8) a esta forma.
Suponiendo que u1 6= 0 en la (1.8), tenemos y = y1 + x−x1u1
u2 y ademász = z1 + x−x1
u1u3 con lo que
r =
x
y1 + x−x1u1
u2z1 + x−x1
u1u3
=
x
m2x+ b2m3x+ b3
(1.9)
Ejemplo 1.1. Sea la recta que contiene los puntos (1, 3, 5) y (6, 4, 2). Halla lasdiferentes formas de escribirla en ecuacionesp
Hagamos primero P =
1
3
5
, y Q =
6
4
2
, por lo que u =
5
1
−3
,
entonces
r =
1 + λ5
3 + λ
5− λ3
ecuación vectorial paramétrica (EVP)
aunque pudiera escribirse usando cualquier otro punto fijo,
por ejemplo
11 + λ5
5 + λ
−1− λ3
donde se hizo λ = 2 en la EVP anterior7
r :
x = 1 + λ5
y = 3 + λ
z = 5− λ3
ecuación cartesiana paramétrica (ECP)
r :x− 1
5= y − 3 =
5− z3
ecuación simétrica (ES)
7De este modo probamos también que la EVP para una determinada recta r no es única
6JOM - Transformaciones Lineales

1-2. Ecuaciones de la recta Capítulo 1. Planos y rectas mediante espacio vectorial
y mediante la matriz de coordenadas (FMR) será r =
x
3 + x−15
5− 3x−15
que
podemos expresarla como
r =
x15x + 14
5
−35x + 28
5
forma matricial (FMR)
y está bién, porque si se hace x = 1 se obtiene P y si se hace x = 6 se
obtiene Q. Si se hiciera x = 11 se obtuviera A =
11
5
−1
y de la ECP
sabemos que basta hacer λ = 2 para obtener ese punto de la recta.Por otra parte, no nos olvidemos de la forma
r :
{(x ,
1
5x+
14
5, −3
5x+
28
5
)}lugar geométrico (LG)
que es un calco de la forma matricial. Se trata de escribir las coordenadasdel vector genérico respecto de la base canónica.y
1-2.2. Distancia de la recta al origen
En la figura 1.3, tenemos que la normal a la recta multiplicada en formaescalar a una paralela a la recta, forzosamente debe ser nula.
X
Y
Z
P
Q
un
n · u = 0
O
N
Figura 1.3: Distancia al origen
En la figura 1.3 hemos puesto que la normal a la recta contiene al origen,
por lo que∣∣∣−−→ON ∣∣∣ es la distancia buscada, y como n ⊥ u⇒ n · u = 0,(8)
pero podemos escribir N =−−→ON = k0 n, lo cual implica también que N · u = 0,
y como N ∈ r, se debe satisfacer la EVP N = P + λ0 u donde λ0 es un valor
8Nota que estamos dotando a nuestro espacio vectorial del producto escalar entre vecto-res. Esta es otra operación independiente de la suma y el escalamiento. Nota que el productoentre vectores no cierra en el espacio sino que cierra en el cuerpo de los reales.
JOM - Transformaciones Lineales
7

Capítulo 1. Planos y rectas mediante espacio vectorial 1-2. Ecuaciones de la recta
particular de λ, como hemos visto anteriormente.De esta manera
N · u = (P + λ0 u) · u= P · u+ λ0 u · u = 0
de la cual λ0 = −P ·uu·u , donde es obvio que no se puede cancelar una u de abajo
con una u de arriba porque son vectores, de ahí que
N = P − P · uu · u
u (1.10)
este es el vector más «corto» del origen a la recta, la distancia será
|N | = 1
u · u|(u · u) P − (P · u) u| (1.11)
Es importante darse cuenta que estamos definiendouna nueva operación entre los puntos del plano: el pro-ducto
u · v =∑3
1 ui · vi,similar a la que antes estaba definida para los vectoresgeométricos.
Ejemplo 1.2. Halla la distancia de la recta del ejemplo anterior —1.1— al origen.p
Como P =
1
3
5
y u =
5
1
−3
, los productos P · u = −7 y u · u = 35, en la
ec.1.10
N = P − −7
35u = P +
1
5u =
2
3.2
4.4
la distancia pedida es
√33.6 ' 5.79655
Pero. . . podemos encontrar soluciones alternativas como:
- buscamos un vector v =
v1v2v3
que sea normal a u =
5
1
−3
, por
lo que v · u = 0, que en este caso arroja 5v1 + v2 − 3v3 = 0, o sea que
v =
v1−5v1 + 3v3
v3
8
JOM - Transformaciones Lineales
1-3. Ecuaciones del Plano Capítulo 1. Planos y rectas mediante espacio vectorial
- una recta normal a la que tenemos está regida por v, pero contiene alorigen, y ambas contienen a N
N = P + λ0 u = 0 + λ1 v
de donde P = λ0 u− λ1 v que la podemos escribir matricialmente
P =[−u v
] [ λ0λ1
] −5 v1−1 −5v1 + 3v3
3 v3
[ λ0λ1
]=
1
3
5
que en este caso deviene en el S.E.L. luego de resolverla, λ0 = 1
5 y portanto arroja el mismo punto N que en la alternativa anterior.y
1-3. Ecuaciones del Plano
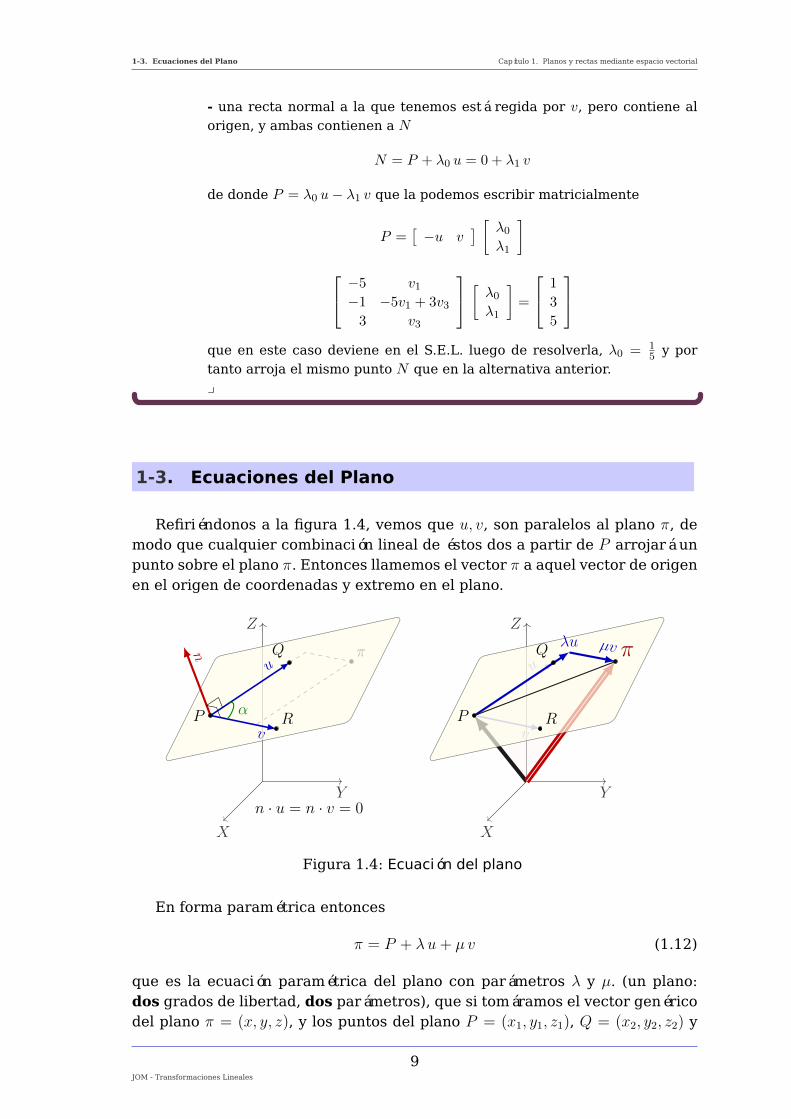
Refiriéndonos a la figura 1.4, vemos que u, v, son paralelos al plano π, demodo que cualquier combinación lineal de éstos dos a partir de P arrojará unpunto sobre el plano π. Entonces llamemos el vector π a aquel vector de origenen el origen de coordenadas y extremo en el plano.
X
Y
Z
π
v
u
n
P
Q
Rα
n · u = n · v = 0
X
Y
Z
v
u
λu µv
P
Q
R
π
Figura 1.4: Ecuación del plano
En forma paramétrica entonces
π = P + λu+ µ v (1.12)
que es la ecuación paramétrica del plano con parámetros λ y µ. (un plano:dos grados de libertad, dos parámetros), que si tomáramos el vector genéricodel plano π = (x, y, z), y los puntos del plano P = (x1, y1, z1), Q = (x2, y2, z2) y
JOM - Transformaciones Lineales
9

Capítulo 1. Planos y rectas mediante espacio vectorial 1-3. Ecuaciones del Plano
R = (x3, y3, z3), o los vectores paralelos al plano u = (u1, u2, u3) y v = (v1, v2, v3)
y los introducimos en la (1.12) tendremosx = x1 + λu1 + µ v1y = y1 + λu2 + µ v2z = z1 + λu3 + µ v3
(1.13)
la ecuación cartesiana paramétrica.
La ecuación general o cartesiana ordinaria puedes deducirla de la 1.12teniendo en cuenta que la normal al plano es n = (a, b, c) y que– π − P = λu+ µ v , yace en el plano π, con lo que π − P ⊥ n
– por tanto n · (π − P ) = 0, o lo que es lo mismo
n · π = n · P
– que en forma cartesiana (a, b, c) · (x, y, z) = (a, b, c) · (x1, y1, z1) es
ax+ by + cz = ax1 + by1 + cz1 = d (1.14)
La pregunta es: ¿cómo se obtiene n conociendo tres puntos no alineadosdel plano?ya que debe ser normal al plano, lo será a v y a u simultáneamente, por lo quen = u× v —producto vectorial9—
Ejemplo 1.3. Halla las ecuaciones del plano φ que contiene al punto P = (1, 2, 3)
y es paralelo a los vectores u = (1, 3, 0) y v = (0, 1, 2)
pla EVP del plano φ será
φ = P + λu+ µ v = {1 + λ , 2 + 3λ+ µ, 3 + 2µ}
y la ecuación ordinaria será, calculando n = u× v = (6,−2, 1), y
n · P = 5 = d
de modo que la ec. gral.
φ : 6x− 2y + z = 5
Alternativamente pudiéramos reemplazado en y = 2+3λ+µ la información
λ = x− 1 y µ =z − 3
2, de donde obtuviéramos lo mismo
y
¿No nos estaremos olvidando de la forma matricial?9. . . Y otra vez nos tomamos la licencia de agregar una operación más a nuestro espacio
vectorial real y estándar R3
10JOM - Transformaciones Lineales

1-3. Ecuaciones del Plano Capítulo 1. Planos y rectas mediante espacio vectorial
1-3.1. Matriz de coordenadas del plano
De la misma manera que en el caso de la recta, para un plano dado enforma general, tenemos
π : ax+ by + cz = d
de donde, si10 c 6= 0 podemos hacer z =ax+ by − d
cy el lugar geométrico
puede escribirse
π :
{(x, y,
ax+ by − dc
)}de donde claramente
π :
x
yax+ by − d
c
Forma Matricial (FMP) (1.15)
Nota que la forma matricial de la recta y del plano son muy parecidas, la únicadiferencia es que una FMR depende solamente de x por ejemplo, y la FMPdepende de por ejemplo x e y (11). Siempre escribiremos las últimas variablesen función de las primeras.
1-3.2. Distancia del plano al origen
Para encontrarla sabemos que podemos hallar un vector normal al planodado por n = u × v, esto da la dirección de la normal; el punto del plano queinterseca esa dirección será
N = k0n (1.16)
un múltiplo de aquél que satisface la ecuación del plano —N ∈ plano—.
Supongamos que ya calculamos n =
a
b
c
, que será inmediato si el plano
está dado por su ecuación general. Entonces, que N esté en el plano significaque hay un par de parámetros λ y µ tales que
N = P + λ0u+ µ0v ∈ plano (1.17)
10Si no fuera el caso, por ejemplo π : ax + by = d , z = z, donde si b 6= 0 tuviéramos
π :
{(x,ax− db
, z
)}, y si c = b = 0, tuviéramos el plano π : ax = d, y = y, z = z, de donde
π :
{(d
a, y, z
)}11Le damos una jerarquía a las componentes de un vector, como se hace en ingeniería;
aunque matemáticamente hubiese sido correcto escribir una recta dando todas sus compo-nentes en función de z o y (como en la recta {(4, y, 2y)}, donde tenemos la otra posibilidad{(
4,z
2, z)}
, tratemos de evitar esta última).
JOM - Transformaciones Lineales
11

Capítulo 1. Planos y rectas mediante espacio vectorial 1-3. Ecuaciones del Plano
Por tanto también N − P = λ0u+ µ0v ∈ plano.
Como N − P yace en el plano, su producto escalar por la normal es nulo
(N − P ) · (u× v) = 0
= N · n− P · n
de donde N · n = P · n, que en la ec.(1.16) tenemos N · n = k0n · n y por tanto
N = k0n =P · nn · n
n (1.18)
entonces —recuerda que n · n = |n|2 y que el versor normal sería n|n|— la dis-
tancia será
|N | = |k0n| =P · n|n|
=|ax1 + by1 + cz1|
|n|
=|d||n|
= |δ| (1.19)
nota que |d| es un valor absoluto y que |n| es el módulo de n
Ejemplo 1.4. Halla la distancia al origen del plano del ejemplo anterior —1.3—.p
Calculamos que φ : 6x − 2y + z = 5, de modo que n =
6
−2
1
, como P
pudiéramos usar uno cualquiera que pertenezca al plano φ, no necesaria-mente el que originalmente nos dieron: haciendo x = 1 e y = 2, obtenemosz = 3 —que en este caso es el mismo P que nos han dado. . . pero una forma
más sencilla era hacer P =
0
0
5
— por tanto
N =6− 4 + 3
36 + 4 + 1
6
−2
1
=5
41
6
−2
1
la distancia es sencillamente el módulo de N , o sea 5√
41en este caso
y
Repaso y notas
El hecho de ver la geometría utilizando las herramientas del espacio vecto-rial no invalida todo lo que has visto de la geometría analítica, solamente setrata de un punto de vista nuevo. Asimismo, y como hemos dicho, hemos agre-gado al espacio vectorial R3 una operación como el producto entre puntos—que se corresponde al producto escalar de dos vectores, y se define en for-ma análoga— y una norma —que se corresponde al módulo de un vector—.
12JOM - Transformaciones Lineales
1-4. Repaso de segmentos y cónicas Capítulo 1. Planos y rectas mediante espacio vectorial
De todas maneras, tampoco hemos trabajado extensivamente los tópicos de lageometría, sino que hemos elegido unos pocos y los hemos abordado de unaposible manera, entre muchas.
Lo importante es que podemos escribir la ecuación de la recta o del planomediante una matriz.
1-4. Repaso de segmentos y cónicas
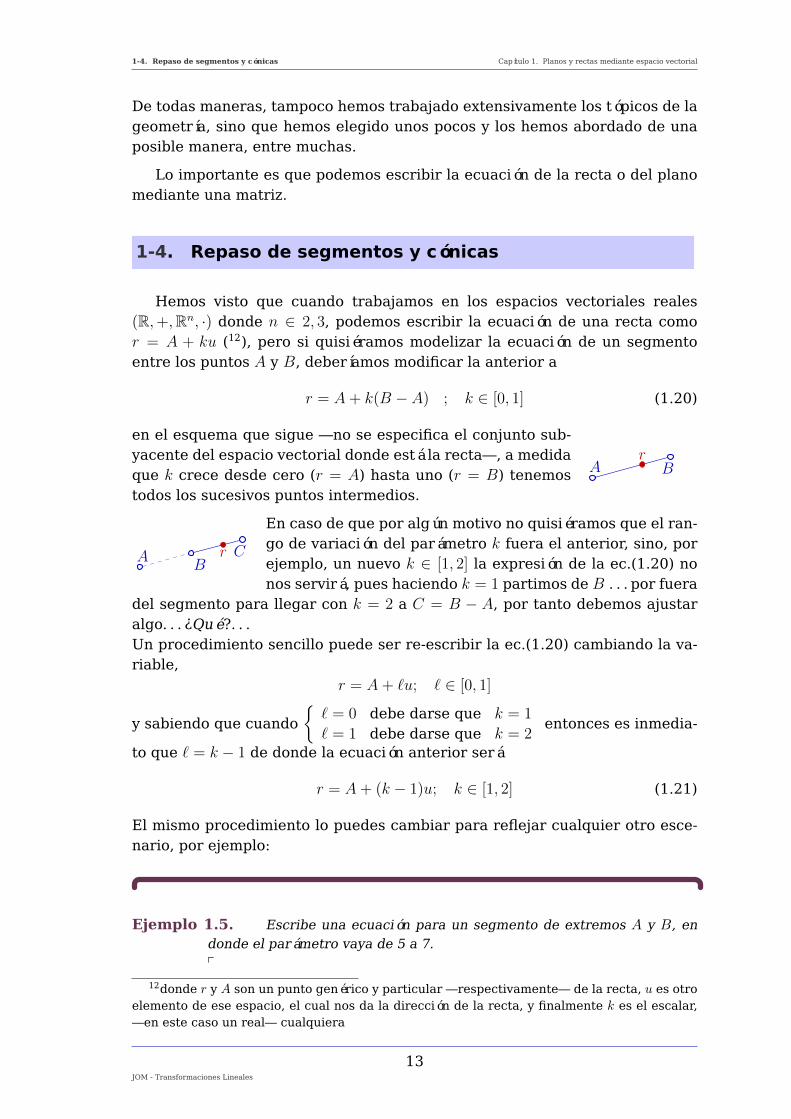
Hemos visto que cuando trabajamos en los espacios vectoriales reales(R,+,Rn, ·) donde n ∈ 2, 3, podemos escribir la ecuación de una recta comor = A + ku (12), pero si quisiéramos modelizar la ecuación de un segmentoentre los puntos A y B, deberíamos modificar la anterior a
r = A+ k(B − A) ; k ∈ [0, 1] (1.20)
A Br
en el esquema que sigue —no se especifica el conjunto sub-yacente del espacio vectorial donde está la recta—, a medidaque k crece desde cero (r = A) hasta uno (r = B) tenemostodos los sucesivos puntos intermedios.
AB
Cr
En caso de que por algún motivo no quisiéramos que el ran-go de variación del parámetro k fuera el anterior, sino, porejemplo, un nuevo k ∈ [1, 2] la expresión de la ec.(1.20) nonos servirá, pues haciendo k = 1 partimos de B . . . por fuera
del segmento para llegar con k = 2 a C = B − A, por tanto debemos ajustaralgo. . . ¿Qué?. . .Un procedimiento sencillo puede ser re-escribir la ec.(1.20) cambiando la va-riable,
r = A+ `u; ` ∈ [0, 1]
y sabiendo que cuando
{` = 0 debe darse que k = 1
` = 1 debe darse que k = 2entonces es inmedia-
to que ` = k − 1 de donde la ecuación anterior será
r = A+ (k − 1)u; k ∈ [1, 2] (1.21)
El mismo procedimiento lo puedes cambiar para reflejar cualquier otro esce-nario, por ejemplo:
Ejemplo 1.5. Escribe una ecuación para un segmento de extremos A y B, endonde el parámetro vaya de 5 a 7.p
12donde r y A son un punto genérico y particular —respectivamente— de la recta, u es otroelemento de ese espacio, el cual nos da la dirección de la recta, y finalmente k es el escalar,—en este caso un real— cualquiera
JOM - Transformaciones Lineales
13
Capítulo 1. Planos y rectas mediante espacio vectorial 1-4. Repaso de segmentos y cónicas
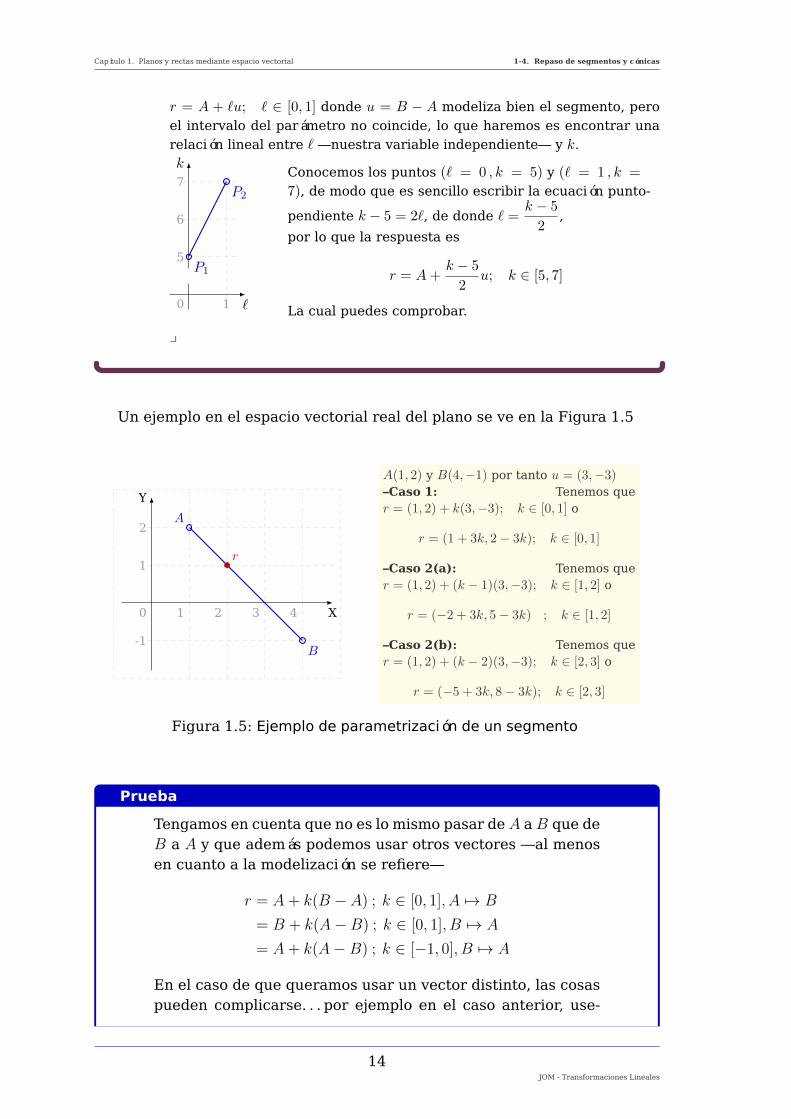
r = A + `u; ` ∈ [0, 1] donde u = B − A modeliza bien el segmento, peroel intervalo del parámetro no coincide, lo que haremos es encontrar unarelación lineal entre ` —nuestra variable independiente— y k.
P1
P2
k
`0 1
5
6
7Conocemos los puntos (` = 0 , k = 5) y (` = 1 , k =
7), de modo que es sencillo escribir la ecuación punto-
pendiente k − 5 = 2`, de donde ` =k − 5
2,
por lo que la respuesta es
r = A+k − 5
2u; k ∈ [5, 7]
La cual puedes comprobar.
y
Un ejemplo en el espacio vectorial real del plano se ve en la Figura 1.5
A
B
r
Y
X0 1 2 3 4
-1
1
2
A(1, 2) y B(4,−1) por tanto u = (3,−3)
–Caso 1: Tenemos quer = (1, 2) + k(3,−3); k ∈ [0, 1] o
r = (1 + 3k, 2− 3k); k ∈ [0, 1]
–Caso 2(a): Tenemos quer = (1, 2) + (k − 1)(3,−3); k ∈ [1, 2] o
r = (−2 + 3k, 5− 3k) ; k ∈ [1, 2]
–Caso 2(b): Tenemos quer = (1, 2) + (k − 2)(3,−3); k ∈ [2, 3] o
r = (−5 + 3k, 8− 3k); k ∈ [2, 3]
Figura 1.5: Ejemplo de parametrización de un segmento
Prueba
Tengamos en cuenta que no es lo mismo pasar de A aB que deB a A y que además podemos usar otros vectores —al menosen cuanto a la modelización se refiere—
r = A+ k(B − A) ; k ∈ [0, 1], A 7→ B
= B + k(A−B) ; k ∈ [0, 1], B 7→ A
= A+ k(A−B) ; k ∈ [−1, 0], B 7→ A
En el caso de que queramos usar un vector distinto, las cosaspueden complicarse. . . por ejemplo en el caso anterior, use-
14JOM - Transformaciones Lineales

1-4. Repaso de segmentos y cónicas Capítulo 1. Planos y rectas mediante espacio vectorial
mos 2(B − A)
r = A+ k · 2(B − A) ; k ∈ [0, 0.5], A 7→ B
= A+ k · 2(A−B) ; k ∈ [−0.5, 0], B 7→ A
1-4.1. Trayectorias con segmentos
A B
C
rs
En el caso de la figura de la derecha —no necesariamente esta-mos en R2—, podríamos eventualmente tomar dos parámetrosdiferentes como sugiere el esquema,{
r = A+ k(B − A) , k1 ∈ [0, 1]
s = B + k(C −B) , k2 ∈ [0, 1]
lo cual consiste en una parametrización «débil» . . .Pero también podríamos —y éste sería el caso más interesante— modelizartodo el camino mediante el uso de un sólo parámetro, valiendo por tramos(parametrización «fuerte» ), con lo que tendríamos
r =
{A+ k(B − A) , k ∈ [0, 1]
B + (k − 1)(C −B) , k ∈ [1, 2](1.22)
Un ejemplo donde se ilustra lo anterior es la situación donde la parametri-zación nos lleva a los puntos A(0, 0), B(1, 0) , C(1, 1) y vuelta a A. Una posiblemodelización para ese camino cerrado sería
r =
(k, 0) , k ∈ [0, 1]
(1,−1 + k) , k ∈ [1, 2]
(3− k, 3− k) , k ∈ [2, 3]r
A B
C
Ejemplo 1.6. Parametriza el cuadradito unitario en el plano, en elsentido contrario al de las agujas del reloj. La secuencia es(0, 0)− (1, 0)− (1, 1)− (0, 1)− (0, 0)
p
X
Y
O A
BC
Parametrización «irregular»
cuIrregular(x, y) =
(x, 0) ;x : 0 1
(1, y) ; y : 0 1
(x, 1) ;x : 1 0
(0, y) ; y : 1 0
La parametrización débil es cuDebil(x, y) =
(k, 0) [0, 1]
(1, k) [0, 1]
(1− k, 1) [0, 1]
(0, 1− k) [0, 1]
JOM - Transformaciones Lineales
15

Capítulo 1. Planos y rectas mediante espacio vectorial 1-4. Repaso de segmentos y cónicas
La parametrización irregular contiene cuatro parámetros —a pesar deque dos a dos usen la misma letra— y algunos van creciendo mientras queotros decrecen.La desventaja de la parametrización débil es que no se hace recorrer unpunto desde O a A y luego a B etc., sino que produce cuatro puntos quese mueven simultáneamente. Y entonces la verdadera parametrización es
cu(x, y) =
(k, 0) [0, 1]
(1, k − 1) [1, 2]
(3− k, 1) [2, 3]
(0, 4− k) [3, 4]y
Ejemplo 1.7. Parametriza la circunferencia unitaria en el plano, en el sentidocontrario al de las agujas del reloj.pEn este caso, la ecuación de la circunferencia unitaria es x2 + y2 = 1, perola parametrización puede hacerse tomando el ángulo α como parámetro.
A
B
C
D
X
Y
α
x
yParametrización «irregular»
fuIrregular(x, y) =
(x,√
1− x2)
;x : 1 −1(x,−√
1− x2)
;x : −1 1
La parametrización débil es fuDebil(x, y) = (cosα, senα), α ∈ [0, 2π)
La parametrización irregular contiene dos parámetros —a pesar de queusen la misma letra— uno decrece mientras que el otro crece.La única desventaja de la parametrización débil es que el parámetro finalvale 2π, que sería bueno que fuera 1 en el caso de por ejemplo, mediacircunferencia unitaria, en ese caso
A
B
C X
Y
Parametrización «fuerte»
fuFuerte(x, y) =
{(cosπk, senπk) ; [0, 1]
(2k − 3, 0) ; [1, 2]
Mientras no haya combinaciones con arcos, la parametrización débil estan buena como la fuerte.y
1-4.2. Combinaciones de arcos y segmentos
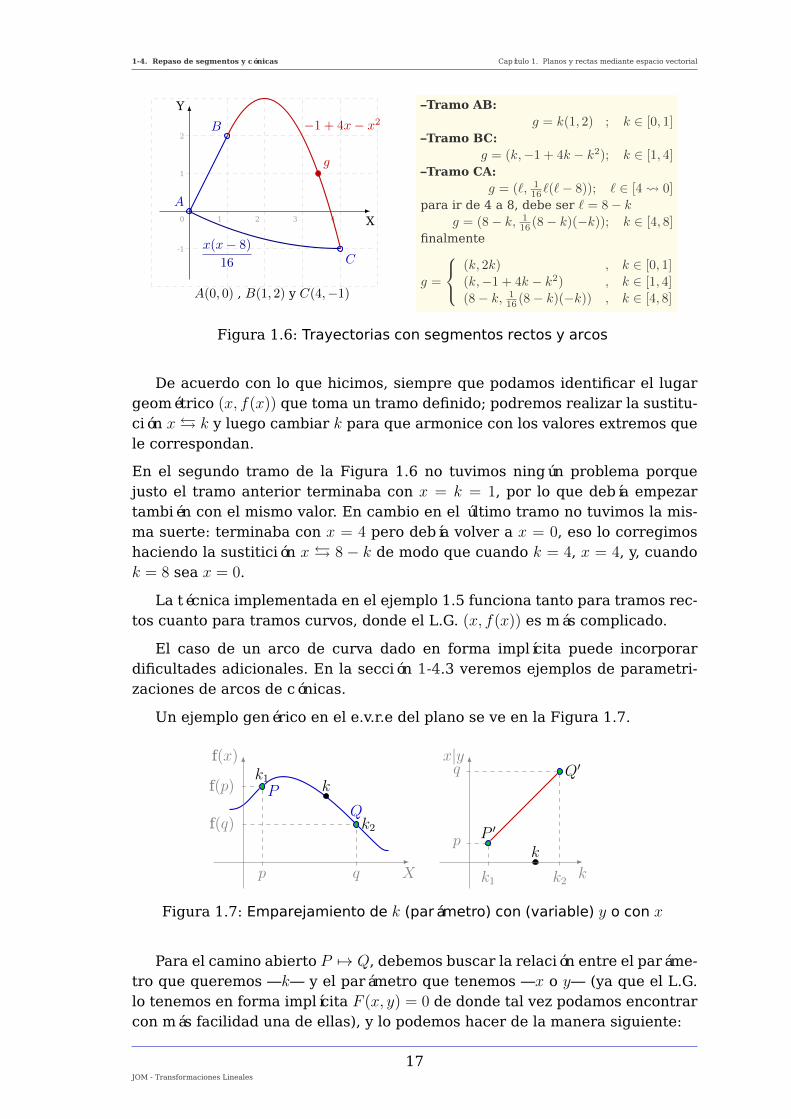
En la Figura 1.6 vemos un ejemplo de camino cerrado —A 7→ B 7→ C 7→ A—que consta de una combinación de arcos y segmentos para completar nuestraexperiencia. En este caso el e.v. es el plano R2.
16JOM - Transformaciones Lineales
1-4. Repaso de segmentos y cónicas Capítulo 1. Planos y rectas mediante espacio vectorial
A
B
C
g
Y
X0 1 2 3 4
-1
1
2−1 + 4x− x2
x(x− 8)
16
A(0, 0) , B(1, 2) y C(4,−1)
–Tramo AB:g = k(1, 2) ; k ∈ [0, 1]
–Tramo BC:g = (k,−1 + 4k − k2); k ∈ [1, 4]
–Tramo CA:g = (`, 1
16`(`− 8)); ` ∈ [4 0]
para ir de 4 a 8, debe ser ` = 8− kg = (8− k, 1
16 (8− k)(−k)); k ∈ [4, 8]
finalmente
g =
(k, 2k) , k ∈ [0, 1]
(k,−1 + 4k − k2) , k ∈ [1, 4]
(8− k, 116 (8− k)(−k)) , k ∈ [4, 8]
Figura 1.6: Trayectorias con segmentos rectos y arcos
De acuerdo con lo que hicimos, siempre que podamos identificar el lugargeométrico (x, f(x)) que toma un tramo definido; podremos realizar la sustitu-ción x� k y luego cambiar k para que armonice con los valores extremos quele correspondan.
En el segundo tramo de la Figura 1.6 no tuvimos ningún problema porquejusto el tramo anterior terminaba con x = k = 1, por lo que debía empezartambién con el mismo valor. En cambio en el último tramo no tuvimos la mis-ma suerte: terminaba con x = 4 pero debía volver a x = 0, eso lo corregimoshaciendo la sustitición x � 8 − k de modo que cuando k = 4, x = 4, y, cuandok = 8 sea x = 0.
La técnica implementada en el ejemplo 1.5 funciona tanto para tramos rec-tos cuanto para tramos curvos, donde el L.G. (x, f(x)) es más complicado.
El caso de un arco de curva dado en forma implícita puede incorporardificultades adicionales. En la sección 1-4.3 veremos ejemplos de parametri-zaciones de arcos de cónicas.
Un ejemplo genérico en el e.v.r.e del plano se ve en la Figura 1.7.
P
Q
f(x)
X
k1k
k2
p
f(p)
q
f(q)
x|y
k
P ′
k
Q′
k1
p
k2
q
Figura 1.7: Emparejamiento de k (parámetro) con (variable) y o con x
Para el camino abierto P 7→ Q, debemos buscar la relación entre el paráme-tro que queremos —k— y el parámetro que tenemos —x o y— (ya que el L.G.lo tenemos en forma implícita F (x, y) = 0 de donde tal vez podamos encontrarcon más facilidad una de ellas), y lo podemos hacer de la manera siguiente:
JOM - Transformaciones Lineales
17

Capítulo 1. Planos y rectas mediante espacio vectorial 1-4. Repaso de segmentos y cónicas
Suponemos conocida la expresión del lugar geométrico {(x, f(x))} o en sudefecto {(f(y), y)} y el tramo está definido entre P y QPara el primer caso nos conviene conocer la excursión de x ∈ [p, q] que haceatravesar de P a Q; en el segundo, la excursión de y ∈ [f(p), f(q)].También debemos decidir los valores del parámetro k. El procedimiento lohemos resumido en el cuadro siguiente.
conocemos x
Proponemos los puntos P ′(k1, p) yQ′(k2, q)de donde formaremos la «recta» relaciónpunto-pendiente x − p = q−p
k2−k1 (k − k1) dedonde
x = p+q − pk2 − k1
(k − k1)
y sustituimos ese valor de x en función dek en la expresión del lugar geométrico ob-teniendo algo así como
{(x(k), fx(k∗))}
conocemos y
Proponemos los puntos P ′(k1, f(p)) yQ′(k2, f(q)) con los que formaremosy − f(p) = f(q)−f(p)
k2−k1 (k − k1) de donde
y = f(p) +f(q)− f(p)
k2 − k1(k − k1)
y sustituimos ese valor de y en función dek en la expresión del lugar geométrico ob-teniendo algo así como
{(fy(k∗), y(k)}
1-4.3. Trayectorias de arcos de cónica
Si se trata de arcos de cónica, éstas se pueden escribir perfectamente enforma paramétrica y nada más hacer la relación entre los ángulos y nuestroparámetro —hemos usado exclusivamente k, pero puede ser cualquiera—
α
0 1 2 3
1
2
Y
X
α = 0
α = 90α = 120
E
En este caso, no tenemos el LG en la for-ma explícita, y aunque igualmente podamosresolver el problema como hicimos arriba,una forma de sustitución más natural está alalcance.
Para la ecuación de la elipse de centro enE(1, 1.5) y semiejes horizontal 2 y vertical 1
de la figura, la podemos modelizar como
1
4(x− 1)2 + (y − 1.5)2 = 1
pero también como
e = (1 + 2 cosα, 1.5 + senα); α ∈ [0, 2π)
Los puntos que hemos dibujado son A(3, 1.5), B(1, 2.5) y C(0, 2.366), ya que nosinteresa el camino abierto A−B − C, en ese orden —contra-reloj—.que ¿cómo hemos encontrado esos puntos?Simplemente tomando A : α = 0 y B : π
2, y sabiendo que C : x = 0, tenemos
18JOM - Transformaciones Lineales

1-4. Repaso de segmentos y cónicas Capítulo 1. Planos y rectas mediante espacio vectorial
que 14(0 − 1)2 + (y − 1.5)2 = 1 arroja y = 3
2±√32
. El primero de ellos es aproxi-madamente y =≈ 2.366, ahora puedes calcular el ángulo: x = 0 = 1 + 2 cosα enla ecuación parametrizada, de donde cosα = −1
2; por lo que α = 120◦ = 2
3π, el
cual en la ecuación comprueba y = 1.5–
Ahora tomemos dos maneras de modelizar el camino A−B − C
1-4.3.1. Primer Método
En este caso usaremos eABC = (1 + 2 cosα, 1.5 + senα); α ∈ [0, 23π]
y en todo caso
eABC =(1 + 2 cos(2
3k) , 1.5 + sen(2
3k))
; k ∈ [0, 1]
1-4.3.2. Segundo Método
En este caso intentamos poner y como función explícita de x —y contamos consuerte porque la trayectoria A − B − C está totalmente incluida en la rama
y = 1.5 +√
1− (x−1)24
, solamente debemos tener en cuenta que x varía ahorade 3 a 0—, en definitiva
eABC =(x , 1.5 + 0.5
√4− (x− 1)2
); x : 3 0
Y, mediante nuestro conocido método. . .
eABC =(−3k + 3 , 1.5 + 0.5
√4− (2− 3k)2
); k ∈ [0, 1]
=(
3− 3k , 1.5 + 0.5√
3k(4− 3k))
; k ∈ [0, 1]
Una de las alternativas puede resultar más conveniente que otra —o quealgún otro método que no hayamos expuesto, pero que estás en condicionesde abordar— de acuerdo con el uso que luego hagamos de ella. Nos referi-remos a este tópico cuando tengamos que transformar trayectorias medianteuna transformación lineal —o no lineal— así que con un método u otro puedeser más fácil re-interpretar el transformado —desparametrizándolo—. La des-parametrización es tanto más sencilla cuando una de las componentes puedefácilmente escribirse en función de la otra. El «grado de facilidad» de esacuenta hará que nos decantemos por alguna alternativa.
JOM - Transformaciones Lineales
19

Capítulo 1. Planos y rectas mediante espacio vectorial 1-4. Repaso de segmentos y cónicas
20JOM - Transformaciones Lineales

Capítulo 2
Transformaciones Lineales
Resumen:
Veremos qué es una transformación y aprendere-
mos a reconocer aquellas que son lineales (TL) de
las que no lo son (TNL). También transformaremos
trayectorias en el plano.
Es importante que toda (TL) tiene asociada una
matriz con la que es posible transformar los ele-
mentos de un espacio escritos a través de su matriz
de coordenadas sobre base canónica. Las facilida-
des del producto de matrices intervienen de modo
elegante y simplificador.
Podremos encontrar estas matrices asociadas, opor el contrario, a partir de ellas, encontrar la leyde la transformación lineal. Las propiedades de lasTL y sus matrices asociadas también es un temafuerte.
21
Capítulo 2. Transformaciones Lineales 2-1. Transformaciones o morfismos
2-1.Transformaciones o morfismos . . . . . . . . . . . . . . . . . . . . 22
2-2.Transformaciones lineales . . . . . . . . . . . . . . . . . . . . . . . 25
2-2.1. Propiedades de la TL . . . . . . . . . . . . . . . . . . . . . 29
2-3.Matriz asociada a una transformación lineal . . . . . . . . . . . . 33
2-3.1. Ley de la TL a partir de la matriz asociada . . . . . . . . . 39
2-4.Matriz asociada a operaciones con Transformaciones lineales . 40
2-4.1. Suma de transformaciones lineales . . . . . . . . . . . . . 40
2-4.2. Escalamiento . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2-4.3. Composición . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2-1. Transformaciones o morfismos
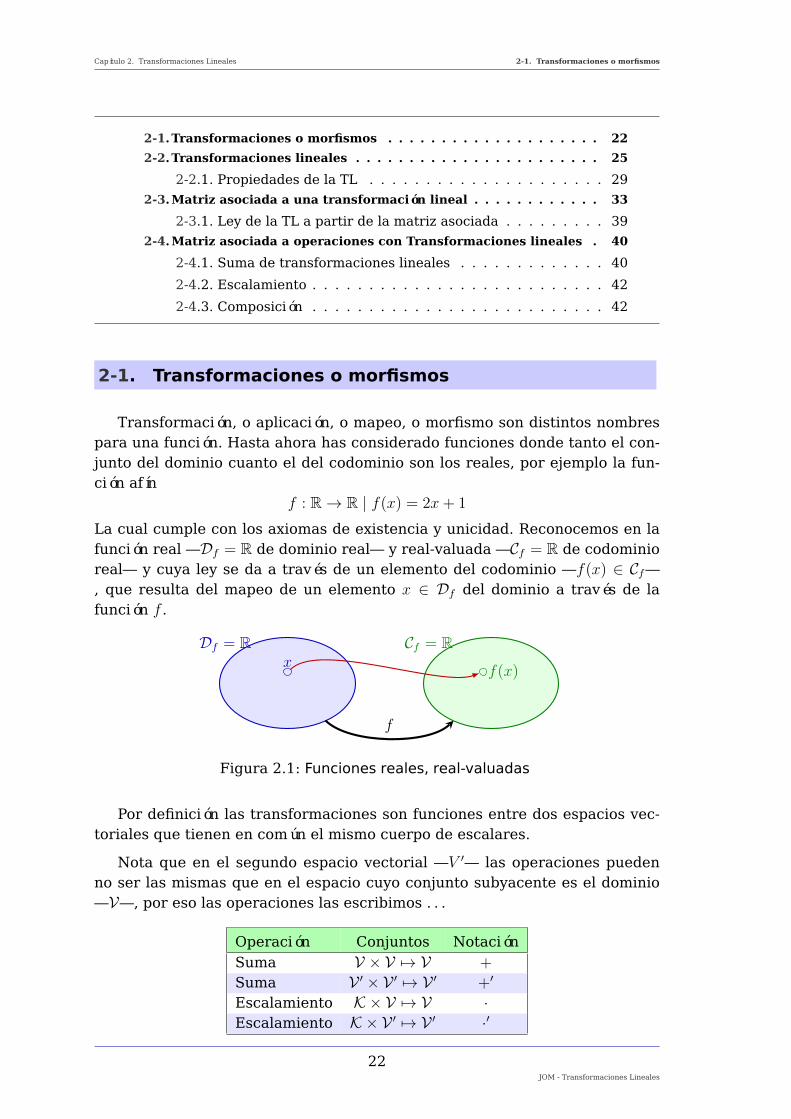
Transformación, o aplicación, o mapeo, o morfismo son distintos nombrespara una función. Hasta ahora has considerado funciones donde tanto el con-junto del dominio cuanto el del codominio son los reales, por ejemplo la fun-ción afín
f : R→ R | f(x) = 2x+ 1
La cual cumple con los axiomas de existencia y unicidad. Reconocemos en lafunción real —Df = R de dominio real— y real-valuada —Cf = R de codominioreal— y cuya ley se da a través de un elemento del codominio —f(x) ∈ Cf—, que resulta del mapeo de un elemento x ∈ Df del dominio a través de lafunción f .
xf(x)
f
Df = R Cf = R
Figura 2.1: Funciones reales, real-valuadas
Por definición las transformaciones son funciones entre dos espacios vec-toriales que tienen en común el mismo cuerpo de escalares.
Nota que en el segundo espacio vectorial —V ′— las operaciones puedenno ser las mismas que en el espacio cuyo conjunto subyacente es el dominio—V—, por eso las operaciones las escribimos . . .
Operación Conjuntos NotaciónSuma V × V 7→ V +
Suma V ′ × V ′ 7→ V ′ +′
Escalamiento K × V 7→ V ·Escalamiento K × V ′ 7→ V ′ ·′
22JOM - Transformaciones Lineales
2-1. Transformaciones o morfismos Capítulo 2. Transformaciones Lineales
vT (v) = v′
T
DT = V CT = V ′
V = (V,+,K, ·) V ′ = (V ′,+′,K, ·′)
(K,+, ·)K
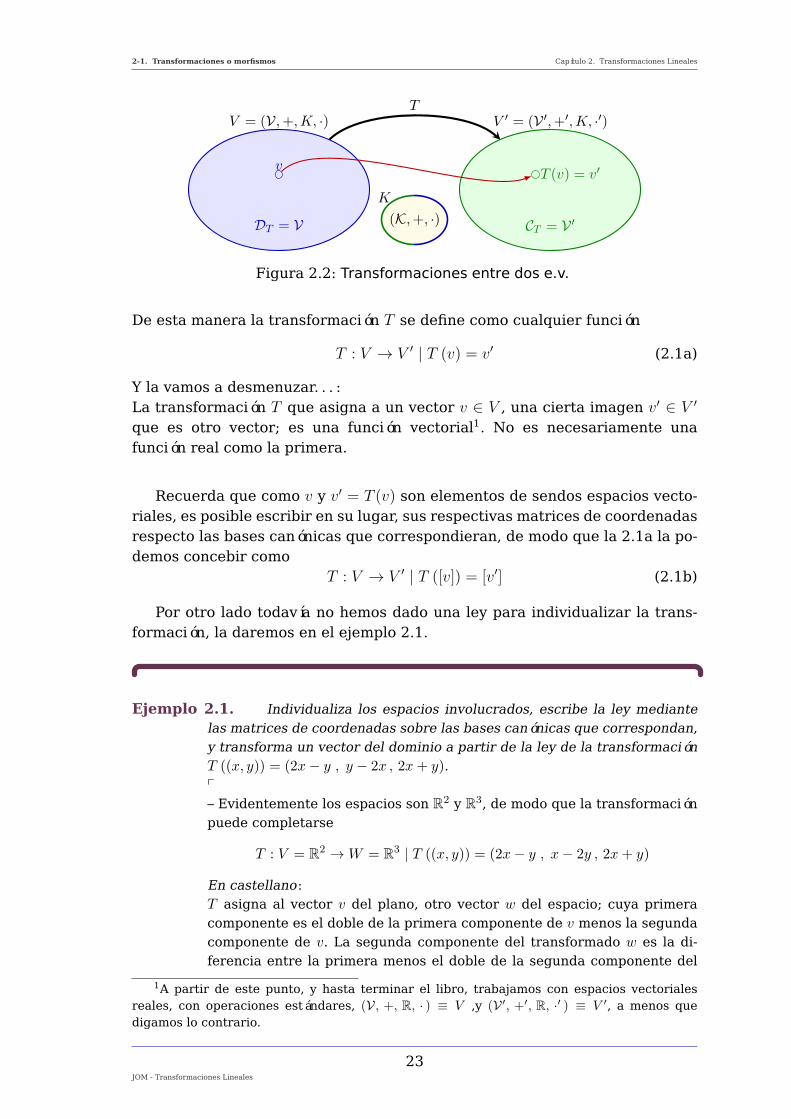
Figura 2.2: Transformaciones entre dos e.v.
De esta manera la transformación T se define como cualquier función
T : V → V ′ | T (v) = v′ (2.1a)
Y la vamos a desmenuzar. . . :La transformación T que asigna a un vector v ∈ V , una cierta imagen v′ ∈ V ′que es otro vector; es una función vectorial1. No es necesariamente unafunción real como la primera.
Recuerda que como v y v′ = T (v) son elementos de sendos espacios vecto-riales, es posible escribir en su lugar, sus respectivas matrices de coordenadasrespecto las bases canónicas que correspondieran, de modo que la 2.1a la po-demos concebir como
T : V → V ′ | T ([v]) = [v′] (2.1b)
Por otro lado todavía no hemos dado una ley para individualizar la trans-formación, la daremos en el ejemplo 2.1.
Ejemplo 2.1. Individualiza los espacios involucrados, escribe la ley mediantelas matrices de coordenadas sobre las bases canónicas que correspondan,y transforma un vector del dominio a partir de la ley de la transformaciónT ((x, y)) = (2x− y , y − 2x , 2x+ y).p– Evidentemente los espacios son R2 y R3, de modo que la transformaciónpuede completarse
T : V = R2 →W = R3 | T ((x, y)) = (2x− y , x− 2y , 2x+ y)
En castellano:T asigna al vector v del plano, otro vector w del espacio; cuya primeracomponente es el doble de la primera componente de v menos la segundacomponente de v. La segunda componente del transformado w es la di-ferencia entre la primera menos el doble de la segunda componente del
1A partir de este punto, y hasta terminar el libro, trabajamos con espacios vectorialesreales, con operaciones estándares, (V, +, R, · ) ≡ V ,y (V ′, +′, R, ·′ ) ≡ V ′, a menos quedigamos lo contrario.
JOM - Transformaciones Lineales
23
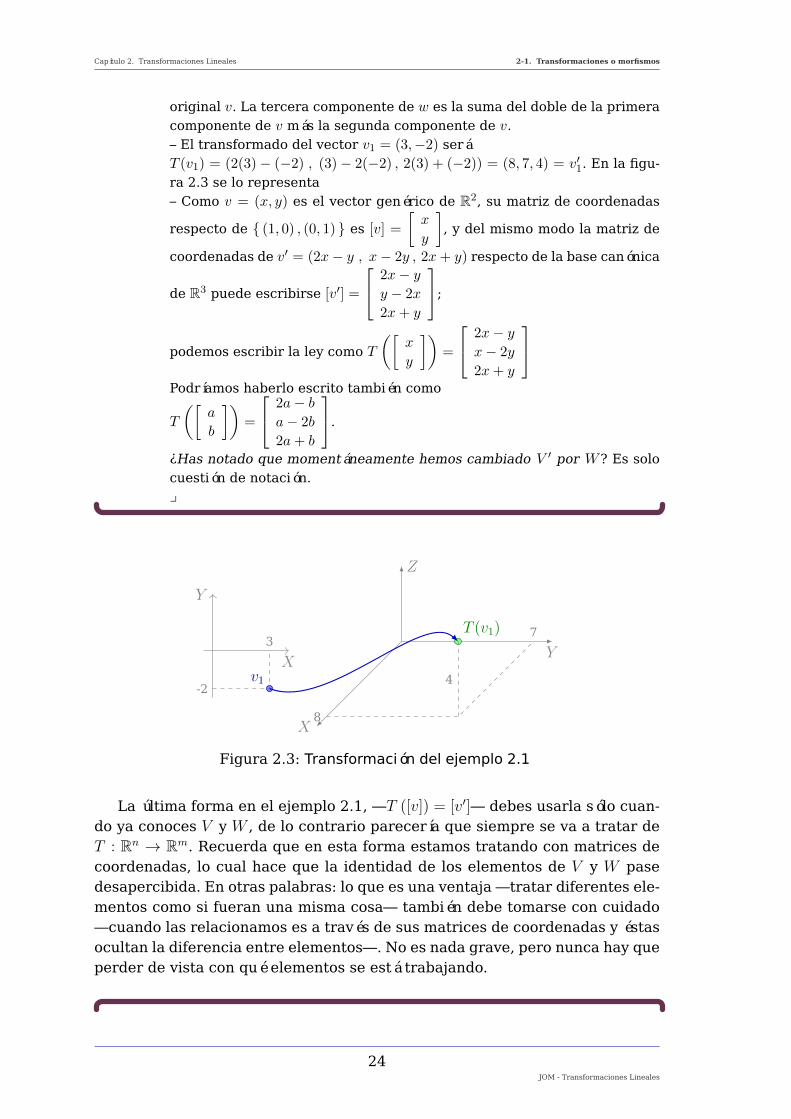
Capítulo 2. Transformaciones Lineales 2-1. Transformaciones o morfismos
original v. La tercera componente de w es la suma del doble de la primeracomponente de v más la segunda componente de v.– El transformado del vector v1 = (3,−2) seráT (v1) = (2(3)− (−2) , (3)− 2(−2) , 2(3) + (−2)) = (8, 7, 4) = v′1. En la figu-ra 2.3 se lo representa– Como v = (x, y) es el vector genérico de R2, su matriz de coordenadas
respecto de { (1, 0) , (0, 1) } es [v] =
[x
y
], y del mismo modo la matriz de
coordenadas de v′ = (2x− y , x− 2y , 2x+ y) respecto de la base canónica
de R3 puede escribirse [v′] =
2x− yy − 2x
2x+ y
;
podemos escribir la ley como T
([x
y
])=
2x− yx− 2y
2x+ y
Podríamos haberlo escrito también como
T
([a
b
])=
2a− ba− 2b
2a+ b
.
¿Has notado que momentáneamente hemos cambiado V ′ por W? Es solocuestión de notación.y
X
Y
v1-2
3
X
Y
Z
T (v1)
8
7
4
Figura 2.3: Transformación del ejemplo 2.1
La última forma en el ejemplo 2.1, —T ([v]) = [v′]— debes usarla sólo cuan-do ya conoces V y W , de lo contrario parecería que siempre se va a tratar deT : Rn → Rm. Recuerda que en esta forma estamos tratando con matrices decoordenadas, lo cual hace que la identidad de los elementos de V y W pasedesapercibida. En otras palabras: lo que es una ventaja —tratar diferentes ele-mentos como si fueran una misma cosa— también debe tomarse con cuidado—cuando las relacionamos es a través de sus matrices de coordenadas y éstasocultan la diferencia entre elementos—. No es nada grave, pero nunca hay queperder de vista con qué elementos se está trabajando.
24JOM - Transformaciones Lineales
2-2. Transformaciones lineales Capítulo 2. Transformaciones Lineales
Ejemplo 2.2. Haz lo mismo para la transformación U dada por
U ((a, b)) = 2a− b + (a− 2b) x+ (2a+ b)x2
pEvidentemente ahora U : R2 → P2 y
U
([a
b
])=
2a− ba− 2b
2a+ b
y
En los ejemplos 2.1 y 2.2 hemos comprobado que a pesar que T y U notienen nada que ver, las dos leyes coinciden si se escriben las transformacionesmediante las matrices de coordenadas en lugar de los elementos genéricos !!
2-2. Transformaciones lineales
Si una transformación T : V → V ′ cumple con(2)
T (v1 + v2) = T (v1)⊕ T (v2) = v′1 ⊕ v′2 (2.2)
y
T (kv) = k � T (v) = k � v′ (2.3)
Se dice que es lineal.
2-2.0.2.1. Funcional
Un Funcional es una transformación lineal particular: el espacio codominioes el conjunto de los reales FL : V → R | FL es lineal.
2-2.0.2.2. Operadores lineales
conocidos son por ejemplo el operador lineal Derivada y el operador linealIntegral son transformaciones lineales donde los espacios involucrados sonespacios de funciones.
Concretando: Una transformación o mapeo lineal es una función vectoriallineal. En los cursos de análisis —cálculo— de varias variables generalmentetratas con funcionales y operadores lineales como las transformadas de Lapla-ce —que transforma funciones en el tiempo t a funciones en la frecuencia s—.A lo largo de la carrera de ingeniería, y dependiendo de la orientación queelijas, puedes ver más operadores —transformaciones— lineales.
2Hemos vuelto a cambiar +′ por ⊕ y ·′ por �, esperando que su lectura sea más cómoda.
JOM - Transformaciones Lineales
25
Capítulo 2. Transformaciones Lineales 2-2. Transformaciones lineales
Una transformación es una función entre los conjuntossubyacentes de dos espacios vectoriales que compar-ten el cuerpo de escalares.Una transformación es lineal cuando cumple con losaxiomas de superposición indicados en las ecuaciones(2.2) y (2.3)
Desmenucemos los axiomas ((2.2) - (2.3)).Claramente la primera suma (+) se realiza en el espacio V y la segunda suma(⊕) indica una suma en el espacio V ′. Como los espacios pueden ser diferentes,las sumas se distinguen.Lo mismo ocurre con el producto3 de K × V en V, y el (�) producto K × V ′ enV ′.
Importante: la primera ecuación (2.2), indica que el transformado de lasuma es la suma de los transformados, y la segunda (2.3) indica que el trans-formado del escalado es el escalado del transformado.
La aseveración siguiente —como veremos en las propiedades, másadelante— es alternativa a las dos anteriores ((2.2) y (2.3)), y las puede re-emplazar
T (k1v1 + k2v2) = (k1 � T (v1))⊕ (k2 � T (v2))
= (k1 � v′1)⊕ (k2 � v′2) ; k1, k2 ∈ K (2.4)
La (2.4) va más allá, y nos dice que toda transformación lineal (TL) preser-va las combinaciones lineales.Para muchas orientaciones de las ingenierías, este concepto de linealidad esfundamental. En principio porque es fácilmente manejable con herramientasmatemáticas modestas, y en segundo lugar porque los fenómenos linealizadosson didácticamente más sencillos de comprender; y finalmente la evasión arealizar cuentas no imprescindibles es una característica del buen ingeniero.Un modelo no lineal —proveniente de un fenómeno natural— puede «lineali-zarse» alrededor de un punto de funcionamiento y entonces lo que estamostratando de aprender se puede usar.
Volviendo a las (2.2) - (2.3) y (2.4): A partir de ahora las trabajaremos conel mismo signo para las sumas, pero conscientes de su significado. Entonces
3No confundas este signo —×— con el producto vectorial entre vectores geométricos detres dimensiones. Esta es la notación para decir que tomamos un elemento de K y lo operamoscon un vector de V para tener como resultado un vector de V
26JOM - Transformaciones Lineales

2-2. Transformaciones lineales Capítulo 2. Transformaciones Lineales
la notación queda
T (v1 + v2) = T (v1) + T (v2) = v′1 + v′2
T (k v1) = k T (v1) = k v′1
En el apéndice A hemos completado una serie de ejemplos de mapeos detrayectorias en R2 que completan los ejemplos que desarrollamos en esta sec-ción.
Ejemplo 2.3. Muestra que T4 dado por T4
([a c
b d
])= (2a− b, c+ d ) es
lineal.pSuponemos todos los espacios involucrados reales y estándares.Para mostrar que T4 es lineal necesitaremos:– dos matrices genéricas de R2×2 y un escalar genérico k :
v1 =
[` p
m q
], v2 =
[e g
f h
](a) Verifiquemos que la transformada de la suma. . .
T4 (v1 + v2) = T4
([`+ e p+ g
m+ f q + h
])+ en R2×2
= (2 (`+ e)− (m+ f) , (p+ g) + (q + h)) ley T4
como cada entrada de las matrices vi son reales, recurrimos a las pro-piedades de los reales: distributividad, asociatividad, conmutatividad... eltransformado lo podemos escribir como
T4 (v1 + v2) = (2`−m+ 2e− f , p+ q + g + h)
y por propiedades de la suma estándar en R2, podemos descomponer eltransformado en la suma de dos vectores
T4 (v1 + v2) = (2`−m, p+ q) + (2e− f , g + h)
= T4 (v1) + T4 (v2)
. . . es la suma de los transformados.donde el último paso es verificar que cada vector descompuesto es eltransformado de las matrices v1 y v2 respectivamente.
(b) Nos falta demostrar que la transformada del escalado. . .
T4 (k v1) = T4
([k ` k p
km k q
])ley T4
= (2k `− km , k p+ k q )
al igual que en el proceso anterior, podemos hacer
T4 (k v1) = k (2`− m, p+ q )
= k T4 (v1)
JOM - Transformaciones Lineales
27

Capítulo 2. Transformaciones Lineales 2-2. Transformaciones lineales
. . . es el escalado del transformado.Y como se cumplen las dos condiciones, podemos decir que T4 es unatransformación lineal.y
Es importante que explicites claramente esta última afirmación —o lanegación— para responder a lo que el ejercicio pregunta, en otras palabras: elhecho de hacer las cuentas no responde satisfactoriamente lo requerido porla consigna del ejercicio.
Ten en cuenta que para probar la linealidad es necesario trabajar siemprecon vectores y escalares genéricos, pero para probar que una transformaciónNO es lineal, bastará exponer un contraejemplo donde no se cumpla algunacualquiera de esas condiciones. Esto vale para las disciplinas —o ramas de laingeniería—, y es bueno que te acostumbres a ello: forma parte de la metodo-logía lógica de construcción del conocimiento de las ciencias exactas.
Ejemplo 2.4. Prueba la no linealidad de T5 (x) = x2 + 1.pEs importante saber qué le hace la transformación al vector: en este caso,toma el vector, lo eleva al cuadrado y lo aumenta en una unidad. (es unatransformación no lineal (TNL) que va de R en R)
Tomemos dos vectores, x e y y transformémoslos mediante la T5 :
T5 (x) = x2 + 1, y T5 (y) = y2 + 1
Verifiquemos que no se cumple un axioma:
T5(x+ y) = (x+ y)2 + 1 ley T5
= x2 + y2 + 2xy + 1 desarrollo en R
= x2 + 1︸ ︷︷ ︸T5(x)
+ y2 + 1︸ ︷︷ ︸T5(y)
+2xy − 1 propiedades en R
6= T5(x) + T5(y) no se cumple!
con lo que podemos afirmar que T5 no es lineal.
Alternativamente pudimos haber elegido un contraejemplo, por un ladoT5(1 + 1) = 4 + 1 = 5, y por otro T5(1) = 2, entonces
T5(1 + 1) = 5
T5(1) + T5(1) = 4
⇓T5(1 + 1) 6= T5(1) + T5(1) T5 no es lineal!
Puedes verificar que hubiese sido más sencillo comprobar que tampoco secumple el otro axioma:
T5 (kx) 6= kT5 (x)
28JOM - Transformaciones Lineales

2-2. Transformaciones lineales Capítulo 2. Transformaciones Lineales
E incluso usar un contraejemplo para este caso.y
2-2.1. Propiedades de la TL
Las vamos a ir comprobando y luego articulando en palabras del lenguajecorriente.
1. Cada espacio vectorial tiene su vector nulo. Como los espacios vectoria-les son diferentes, puede distinguirse los vectores nulos de diferentesespacios, por ejemplo θ ∈ V, y θ ∈ V ′.Luego si transformáramos el vector nulo del primer espacio y aplicára-mos la propiedad 0u = θ, y la propiedad de linealidad que acabamos dever...Como4 T (θ) = T (0 v) = 0T (v) = 0 v′ = θ
. . . tenemos que una transformación lineal mapea siempre el vector nulodel espacio V en el vector nulo del espacio V ′, es decir que
Para una TL, la imagen del vector nulo; es el otrovector nulo
2. Aplicando la propiedad de linealidad (2.2) a la combinación lineal k1 v1 +
k2 v2 (que es un vector de V ) tenemos que
T (k1 v1 + k2 v2) = T (k1 v1) + T (k2 v2)
y aplicando nuevamente la 2.3 al segundo miembro, tenemos
T (k1 v1 + k2 v2) = k1 T (v1) + k2 T (v2)
claramente se vé que en la TLla transformada de la combinación lineal es la combinación lineal de lostransformados, es decir que
la TL preserva las combinaciones lineales
4Aplicamos: — propiedad de espacio V , — propiedad de la transformación lineal, —un T (v)
no es otra cosa que un vector que «vive» en V ′, y finalmente —propiedad del espacio V ′
JOM - Transformaciones Lineales
29

Capítulo 2. Transformaciones Lineales 2-2. Transformaciones lineales
Esto se conoce en la ingeniería más comúnmente con el nombre de «prin-cipio de superposición» , y es prueba de la (2.4).
3. Una recta se escribe por su ecuación vectorial paramétrica,r = P + λu donde P es un vector del plano o del espacio, fijo y pertene-ciente a la recta, mientras que u es un vector paralelo a la recta y λ es unescalar real, para que r sea cualquier punto de la recta (o sea un vectordesde el origen de coordenadas hasta un punto genérico de la recta).Transformemos todos los puntos de la recta mediante una transforma-ción lineal tipo T : V = Rn → V = Rn donde n = 2, 3 y veamos quésucede. . .
T (r) = T (P + λu) mapeo de la recta
= T (P ) + λT (u) aplicando linealidad
= P ′ + λu′ es otra r′
Evidentemente P ′ es un vector (fijo); y también u′ es otro vector del mis-mo espacio, por lo que r′ = P ′ + λu′ representa otra recta5 en eseespacio vectorial. Es decir que
una TL T : Rn → Rn mapea rectas en rectas.
Esto es de suma importancia6 cuando hay que mapear, por ejemplo, elcuadrado unitario a través de una transformación lineal dentro de R2
en R2: lo que se hará es mapear los cuatro vértices —tres: porque yasabemos que el origen se transforma en el origen— y luego unirlos ade-cuadamente de a dos por medio de una recta7.
Para ver cómo aprovechamos estas propiedades, realicemos el siguienteejemplo
Ejemplo 2.5. Prueba la linealidad de T5 (x) = x2 + 1.pYa hemos probado que no es lineal (pág.28),
5A menos que u′ sea el vector nulo, con lo cual la recta pierde un grado de libertad y semapea en un punto, como caso particular. La afirmación más correcta es que una TL de unespacio en sí mismo no mapea una recta en una curva.
6Ciertamente que una transformación lineal mapea planos en planos, como fácilmente lopuedes verificar.
7Puede que una recta se mapee en un punto o un plano se mapee en una recta. Discute enqué condiciones pueden suceder tales resultados.
30JOM - Transformaciones Lineales

2-2. Transformaciones lineales Capítulo 2. Transformaciones Lineales
pero ahora sabemos que se hubiera probado suficientemente con tal dedecir que
T5 (0) = 1 6= 0
, y como no cumple con la propiedad 1,T5 no es lineal.y
Nota 1. Debes tener mucho cuidado al usar este tipo de atajos, ya que el hechoque se cumpla una propiedad no asegura que la transformación es lineal;lo que se asegura es que si NO se cumple una propiedad, la transformaciónNO es lineal.
Ejemplo 2.6. Veamos qué sucede si modificamos T5 modificando su ley de ma-nera que ahora sea T ′5 (x) = x2.pEvidentemente T ′5(0) = 0, pero T ′5 es claramente no lineal,y lo probaremos: T ′5(z) = z2 con lo que k T ′5(z) = k, z2 con k ∈ R, luego
T ′5(k z) = (k z)2 Ley de T ′5
= k2, z2 propiedad · en R= k2 T ′5(z) Ley de T ′5
6= k T ′5(z) T ′5 no es lineal
lo cual hace que no se cumpla la condición del producto y por tanto T ′5 esno lineal.Para un contraejemplo pudiéramos usar cualquier k 6= 0, 1 específico.y
En el ejemplo que sigue, transformamos —mapeamos— una trayectoria, noun vector aislado.
Ejemplo 2.7. Usemos el hecho que una transformación lineal mapea rectasen rectas para mapear la trayectoria cuadrado unitario através de la TL:T ((x, y)) = (2x− y , x+ y )
pEn este caso el cuadrado unitario (Cu) puede escribirse de una vez comouna función paramétrica
Cu (λ) =
AB : (λ, 0) , 0 ≤ λ ≤ 1
BC : (1, λ− 1) , 1 ≤ λ ≤ 2
CD : (3− λ, 1) , 2 ≤ λ ≤ 3
DA : (0, 4− λ) , 3 ≤ λ ≤ 4 A B
CD
X
Y
JOM - Transformaciones Lineales
31

Capítulo 2. Transformaciones Lineales 2-2. Transformaciones lineales
y su mapeo es
C ′u (λ) =
(2λ, λ) , 0 ≤ λ ≤ 1
(3− λ, λ) , 1 ≤ λ ≤ 2
(5− 2λ, 4− λ) , 2 ≤ λ ≤ 3
(λ− 4, 4− λ) , 3 ≤ λ ≤ 4A′
B′
C ′
D′
X
Y
Para desparametrizar la trayectoria, lo que haremos es igualar la primeracomponente a x y calcular la segunda, tenemos la relación para graficaren forma sencilla
C ′u(λ) =
AB
′: y = x/2 , x : 0 7→ 2
BC′: y = 3− x , x : 2 1
CD′: y = 1.5 + x/2 , x : 1 −1
DA′: y = −x , x : −1 7→ 0
Nota que hemos podido mapear solamente los cuatro puntos (o lostres, puesto que el mapeo del origen se conserva) y luego calcular lossegmentos mapeados
X
Y
1 2
1
2
1 2
1
2Y′
X ′
A = (0, 0) 7→ (0, 0) = A′
B = (1, 0) 7→ (2, 1) = B′
C = (1, 1) 7→ (1, 2) = C ′
D = (0, 1) 7→ (−1, 1) = D′
pero nos estamos preparando para el siguiente ejemplo. . .y
En el siguiente ejemplo volvemos a transformar el cuadradito unitario, peropara una transformación no lineal.presta atención a los detalles.
Ejemplo 2.8. En cambio cuando la transformación no es lineal las rectas nose transformarán en rectas, y será necesario trabajar como en la primeraparte del ejemplo anterior. Usa la TNL: H ((x, y)) = (1− x+ y, x2− x− y).pEn este caso
Cu′ =
(1− λ, λ2 − λ
), 0 ≤ λ ≤ 1
(λ− 1, 1− λ) , 1 ≤ λ ≤ 2(λ− 1, λ2 − 5λ+ 5
), 2 ≤ λ ≤ 3
(5− λ, 4− λ) , 3 ≤ λ ≤ 4
haciendo lo mismo que en el ejemplo anterior lo des-parametrizamos . . .
Cu′ =
y = x (x− 1) , x : 1 0
y = −x , x : 0 7→ 1
y = 1− 3x+ x2 , x : 1 7→ 2
y = 1− x , x : 2 1
32JOM - Transformaciones Lineales
2-3. Matriz asociada a una transformación lineal Capítulo 2. Transformaciones Lineales
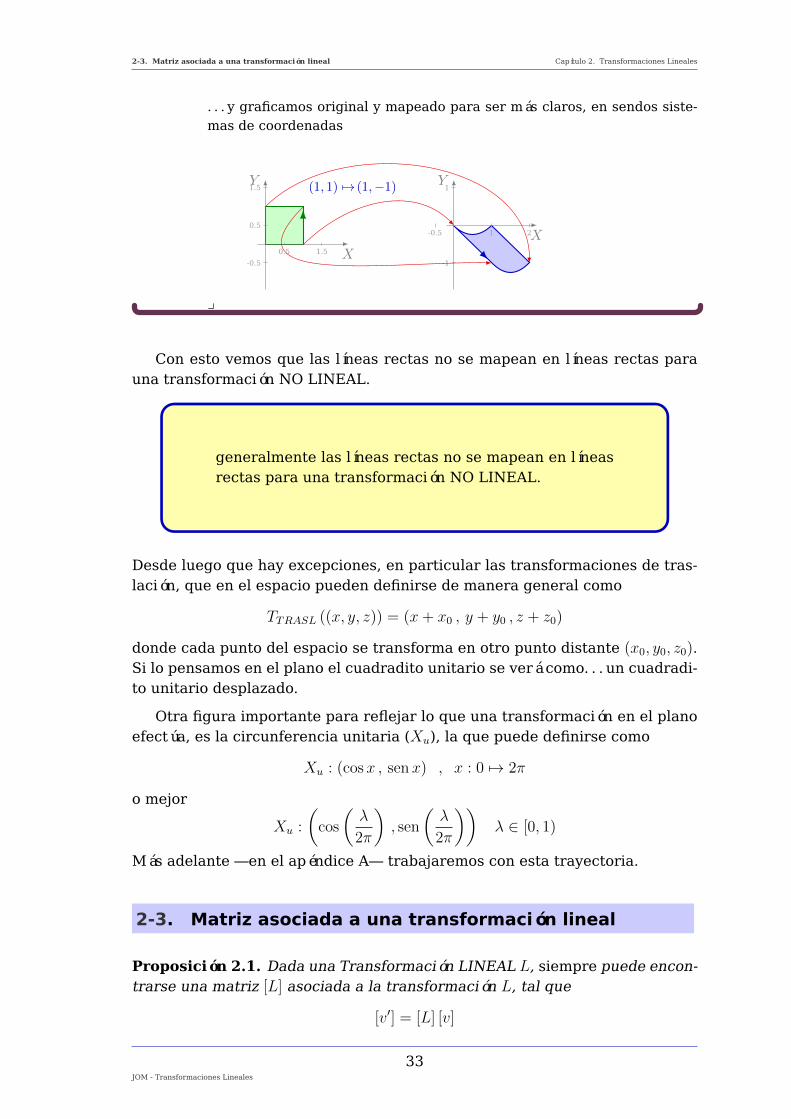
. . . y graficamos original y mapeado para ser más claros, en sendos siste-mas de coordenadas
0.5 1.5
-0.5
0.5
1.5
X
Y
-0.5 1 2
-1
1
X
Y(1, 1) 7→ (1,−1)
y
Con esto vemos que las líneas rectas no se mapean en líneas rectas parauna transformación NO LINEAL.
generalmente las líneas rectas no se mapean en líneasrectas para una transformación NO LINEAL.
Desde luego que hay excepciones, en particular las transformaciones de tras-lación, que en el espacio pueden definirse de manera general como
TTRASL ((x, y, z)) = (x+ x0 , y + y0 , z + z0)
donde cada punto del espacio se transforma en otro punto distante (x0, y0, z0).Si lo pensamos en el plano el cuadradito unitario se verá como. . . un cuadradi-to unitario desplazado.
Otra figura importante para reflejar lo que una transformación en el planoefectúa, es la circunferencia unitaria (Xu), la que puede definirse como
Xu : (cosx , senx) , x : 0 7→ 2π
o mejor
Xu :
(cos
(λ
2π
), sen
(λ
2π
))λ ∈ [0, 1)
Más adelante —en el apéndice A— trabajaremos con esta trayectoria.
2-3. Matriz asociada a una transformación lineal
Proposición 2.1. Dada una Transformación LINEAL L, siempre puede encon-trarse una matriz [L] asociada a la transformación L, tal que
[v′] = [L] [v]
JOM - Transformaciones Lineales
33

Capítulo 2. Transformaciones Lineales 2-3. Matriz asociada a una transformación lineal
Este teorema afirma que:Si tenemos una transformación lineal, —solo si es lineal— hemos de podercalcular la matriz de coordenadas del transformado v′ de cualquier vectorv, como producto de una matriz —el teorema no nos dice cómo la vamos aencontrar— por la matriz de coordenadas de v —sobre las respectivas basescanónicas—.
Como consecuencia de la proposición 2.1, distintos entes —como lo sonlas funciones, las matrices, los polinomios etc.— los podremos transformarpor medio de sus matrices de coordenadas; ya no importa qué cosa sean: lospodemos ver como si fueran vectores columna.En otras palabras:
si T : V → V ′ es lineal, estamos habilitados para tomarventaja a la hora de transformar, simplemente
aplicando el Álgebra matricial.
Para la prueba de esta proposición, trabajemos primero con un ejemplo par-ticular en el plano, luego un ejemplo genérico en el plano, y finalmente laprueba real que debe ser genérica.
Ejemplo 2.9. Sea la TL L ((x, y)) = (3x− y , x+ 2y), encuentra una [L] adecuada
de manera que [L]
[x
y
]=
[3x− yx+ 2y
]pPodemos empezar por las dimensiones que debiera tener [L], en este caso
[L] [v]2×1 = [w]2×1, por tanto será [L] ∈ R2×2,
si escribiéramos [L] =
[a11 a12a21 a22
]veríamos que
[L] [v] =
[a11 a12a21 a22
] [x
y
]=
[a11x+ a12y
a21x+ a22y
]=
[3x− yx+ 2y
]de inmediato surge que [L] debe ser
[L] =
[3 −1
1 2
]con lo cual hemos dado el paso —para un caso particular— en encontrarla matriz asociada a una TL, como asegura la proposición 2.1y
34JOM - Transformaciones Lineales

2-3. Matriz asociada a una transformación lineal Capítulo 2. Transformaciones Lineales
En este caso no sólo demostramos su existencia sino que la calculamos.Pero ésta no es la forma que lo haremos sistemáticamente. Para ellousaremos las mismas propiedades de las transformaciones lineales...
Ejemplo 2.10. Sea la TL8 L ((x, y)) = (3x− y , x+ 2y), encuentra la matrizasociada [L] a la transformación —o mapeo lineal— L
pAhora lo haremos un poco más genérico:la base canónica de V (DL = R2) es C2 = {(1, 0) , (0, 1)} = { e1, e2 }, y elvector genérico v = (x, y) lo puedes escribir como (x, y) = x (1, 0)+y (0, 1),de modo que el transformado de (x, y) mediante L será:
L((x, y)) = L(x (1, 0) + y (0, 1)) El dominio es e.v.
= xL((1, 0)) + y L((0, 1)) linealidad de L
= xL(e1) + y L(e2)
= x e′1 + y e′2 = v′ que lo podemos «bautizar»
=(x′ , y′
)que para el caso nuestro es
v′ = (3x− y , x+ 2y) = x (3, 1) + y (−1, 2) =(x′, y′
)si escribiéramos cada vector mediante su matriz de coordenadas respectode la base canónica tendríamos[
x′
y′
]=
[3x− yx+ 2y
]= x
[3
1
]+ y
[−1
2
]
y reacomodando [(x, y)] =
[x
y
]tenemos. . .
[x′
y′
]=
[3 −1
1 2
] [x
y
]=
[3x− yx+ 2y
]que es lo que teníamos arriba.El procedimiento lo puedes ver en forma genérica a partir de la relaciónxe′1 + ye′2 = (x′, y′), escribiéndola en forma matricial:
[e′1 e′2] ·[x
y
]=
[x′
y′
]
en la cual [v] =
[x
y
], [v′] =
[x′
y′
], y entonces la primera matriz no es
otra que la que estamos persiguiendo: [L] = [e′1 e′2].y
8A simple vista pareciera estar demás dos paréntesis en L ((x, y)), pero observa: la imagende v se escribe L (v), y v en este caso es v = (x, y), de modo que no existe tal redundancia.
JOM - Transformaciones Lineales
35

Capítulo 2. Transformaciones Lineales 2-3. Matriz asociada a una transformación lineal
Es decir que la matriz [L ] asociada a la transformación lineal L es aquelladonde cada una de sus columnas es la matriz de coordenadas del transformadode un elemento base del dominio, respecto de la base canónica del. . . —comoes el transformado, no puede ser sino respecto de la base canónica (del)—codominio.
Prueba
Sean V y V ′ de dimensión finita —dim(V ) = n, dim(V ′) = m. Un vectorgenérico de V se puede expresar como combinación lineal de CV la basecanónica de V
Sean CV = { e1, e2, · · · , ej, · · · , en } ∈ V y CV ′ = { c1, c2, · · · , cj, · · · , cm } ∈ V ′las bases canónicas.Entonces un elemento v ∈ V tendrá la siguiente matriz de coordenadas
[v] =
v1v2...vn
respecto de CV , de modo que
v = v1e1 + v2e2 + · · ·+ vnen (2.5)
La transformada de cada vector ej de la base CV —L(ej) = e′j ∈ V ′—tendrá su matriz de coordenadas respecto de CV ′ como. . .
[L(ej)] = [e′j] =
e′1j
e′2j...e′mj
j = 1, 2, · · · , n (2.6)
Mientras que un elemento L(v) = v′ ∈ V ′ tendrá esta otra matriz de
coordenadas [v′] =
v′1
v′2...v′m
respecto de C ′V .
La transformación de v es
v′ = v1 e′1 + v2 e
′2 + · · ·+ vn e
′n
y escrito en forma matricial
[v′] = v1 [e′1] + v2 [e′2] + · · ·+ vn [e′n]
36JOM - Transformaciones Lineales

2-3. Matriz asociada a una transformación lineal Capítulo 2. Transformaciones Lineales
reordenando —y teniendo en cuenta la (2.6)—
v′1
v′2...v′m
=
e′11
e′21...e′m1
e′12
e′22...e′m2
· · ·
e′1n
e′2n...e′mn
·v1v2...vn
de donde
[L] =[
[L (e1 )] [L (e2 )] · · · [L (en )]]
o sea[L] = L ( [CV ]) (2.7)
es la matriz de las transformadas de los vectores de la base canónica deV , expresados en la base canónica de V ′.
De acuerdo con la (2.7), para los espacios vectoriales del tipo Rn podemosescribir [L] = [L (In)] donde In es la matriz identidad de n× n.
Claramente, la matriz [L] asociada a la TL L : V → V ′ se encuentra:
1. Transformando cada uno de los vectores de la base canónica del espacioDominio —hallando e′j ∀j = 1, 2, · · · , n—.
2. Y calculando sus matrices de coordenadas —[e′j]— sobre la base canónicade V ′, y ordenando éstas como columnas de [L]
3. En riguroso orden
Y el producto[L] [v] = [v′]
es la matriz de coordenadas del transformado L (v), escrito sobre base canó-nica CV ′, donde [v] es la matriz de coordenadas de v sobre la base canónica deV —CV — y [L] es la matriz asociada a la TL L : V → V ′
La figura 2.4 es un pictograma indicativo de nuestro trabajo Suponiendo quedim(V ) = n y dim(V ′) = m, claramente es
[L] ∈ Kdim(V ′)×dim(V ) (2.8)
Ejemplo 2.11. Halla la matriz asociada a la TL T ((x, y)) =
(2x− y , x+ y , y − x)
p1- Verificado está que es T lineal; de lo contrario no intentaríamos encon-trar la matriz, que se nos pide2- Los transformados de los elementos de la base canónica {(1, 0) , (0, 1)}de R2 son T ((1, 0)) = (2, 1,−1) y T ((0, 1)) = (−1, 1, 1),
JOM - Transformaciones Lineales
37

Capítulo 2. Transformaciones Lineales 2-3. Matriz asociada a una transformación lineal
v v′ = L(v)L
CV CV ′
[v] [v’][L]
LV V ′
Figura 2.4: Transformación lineal y matrices de coordenadas
3- escritos sobre la base canónica{(1, 0, 0) , (0, 1, 0) , (0, 0, 1)} de R3 y agrupados en una matriz...
T
([1 0
0 1
])=
2 −1
1 1
−1 1
= [T ]
4- lo podemos comprobar. . .
2 −1
1 1
−1 1
[ xy
]=
2x− yx+ y
−x+ y
, con lo que
[T ] =
2 −1
1 1
−1 1
es la matriz pediday
No perdamos de vista que las transformaciones pueden actuar entre dostipos cualesquiera de espacios vectoriales, siempre que estén asociadas almismo cuerpo de escalares.
Ejemplo 2.12. Halla la matriz asociada a la transformación lineal
L : R2×2 → P2|L([a c
b d
])= 2b− (a− b)x+ (d+ c)x2.
pRecordemos que las bases canónicas son
CR2×2 =
{[1 0
0 0
],
[0 0
1 0
],
[0 1
0 0
],
[0 0
0 1
]}CP2 =
{1, x, x2
}Las transformaciones de los vectores de la base canónica de las matricesde dos por dos y escritas en la base de los polinomios de grado hasta dos
38JOM - Transformaciones Lineales

2-3. Matriz asociada a una transformación lineal Capítulo 2. Transformaciones Lineales
son:
L
([1 0
0 0
])= −x ≡
0
−1
0
L
([0 1
0 0
])= x2 ≡
0
0
1
L
([0 0
1 0
])= 2 + x ≡
2
1
0
L
([0 0
0 1
])= x2 ≡
0
0
1
y de acuerdo con ello: [L] =
0 2 0 0
−1 1 0 0
0 0 1 1
es la matriz solicitada.
y
2-3.1. Ley de la TL a partir de la matriz asociada
Hasta ahora hemos visto que dada una TL L podemos encontrar su matrizasociada [L], la pregunta es¿Si se diera la TL a través de dar su matriz asociada [L], seríamos capaces deencontrar la ley de la transformación lineal?
En otras palabras: si fuera posible, estaríamos dando por sentado que paracada transformación lineal hay una única matriz asociada y viceversa.
La respuesta es sencilla —y lo hicimos en el punto 4 del ejemplo anterior—:nada más hay que transformar un vector genérico de V .
Ejemplo 2.13. Encuentra la ley de la transformación lineal sabiendo que la ma-
triz asociada es [L] =
1 2
3 4
5 6
.
pAl ser las columnas de [L] las matrices de coordenadas de la base canónicade V , si no conocemos V y V ′ no conocemos todo L, pero por lo menos co-noceremos la estructura de la ley de L en forma de matriz de coordenadas 1 2
3 4
5 6
[ xy
]=
x+ 2y
3x+ 4y
5x+ 6y
es decir que
[L
([x
y
])]=
x+ 2y
3x+ 4y
5x+ 6y
y
p
JOM - Transformaciones Lineales
39

Capítulo 2. Transformaciones Lineales 2-4. Matriz asociada a operaciones con Transformaciones lineales
Si nos hubiesen dicho que V = R2 y que V ′ = P2 hubiéramos podidoescribir —cambiando por ejemplo x con a e y con b—,
[L
([a
b
])]=
a+ 2b
3a+ 4b
5a+ 6b
y hubiese significado que
L ( (a , b) ) = a+ 2b+ (3a+ 4b)λ+ (5a+ 6b)λ2
fuera la ley solicitada.y
2-4. Matriz asociada a operaciones con Transformacio-
nes lineales
Las transformaciones no son más que funciones, y éstas pueden sumarse,componerse, si es posible hallar la inversa, etcétera. Lo mismo podrá hacersepara las transformaciones. La pregunta es: ¿Cómo influye esto en la matrizasociada?
2-4.1. Suma de transformaciones lineales
Supongamos dos transformaciones lineales L1 : V → V ′ y L2 : V → V ′,operando sobre los mismos dominio y codominio9, de manera que exista latransformación suma, naturalmente definida como. . .
Ls : V → V ′ | Ls (v) = L1 (v) + L2 (v)
El pictograma de la figura 2.5 lo aclara más.
V V ′
u
L1(u) = u′1
L2(u) = u′2
S(u) = u′S = u′1 + u′2
L1
L2
S
L1
L2
S
Figura 2.5: Transformación suma de transformaciones lineales
Probemos primero que es lineal. Si es así, por la proposición (2.1) deberáexistir la matriz asociada, que la calcularemos después.
9Y naturalmente, ambas transformaciones lineales sobre el mismo cuerpo, de lo contrariono se podría siquiera considerar alguna de ellas.
40JOM - Transformaciones Lineales
2-4. Matriz asociada a operaciones con Transformaciones lineales Capítulo 2. Transformaciones Lineales
Para probar linealidad, debemos probar que los axiomas (2.2) y (2.3) secumplan para la transformación S. Necesitaremos dos vectores u y v del do-minio V y sus transformados u′1, u
′2 y v′1, v
′2 a través de L1 y L2 respectivamente,
además de un escalar k
Prueba
Probemos la suma:Como u y v están en V , su suma está garantizada que está enV —de lo contrario V no sería un espacio vectorial— por tantopodemos plantear que
L1(u+ v) = (u+ v)′1 existe en V ′
= u′1 + v′1 linealidad de L1
L2(u+ v) = (u+ v)′2 = u′2 + v′2 ídem para L2
entonces la imagen de la suma a través de S es
S(u+ v) = L1(u+ v) + L2(u+ v) definición de S
= (u′1 + v′1) + (u′2 + v′2) leyes de L1, L2
por axiomas de conmutatividad y asociatividad en el espaciovectorial V ′
S(u+ v) = (u′1 + u′2) + (v′1 + v′2) axiomas en V ′
= S(u) + S(v) definición de S
con lo que la suma está probada.
Prueba
Probemos el producto:De manera similar, el vector escalado k u está en V , por lo que
S(k u) = L1(k u) + L2(k u) definición de S
= k L1(u) + k L2(u) linealidad de L1, L2
por axioma distributiva del producto en la suma en el espacioV ′, podemos escribir
S(k u) = k (L1(u) + L2(u)) dist.en V ′
= k S(u) Definición de S
con lo que el producto también está probado.
Por tanto S : V → V ′ | S (v) = L1 (v) + L2 (v) es lineal.
Calculemos entonces su matriz asociada [S].
JOM - Transformaciones Lineales
41

Capítulo 2. Transformaciones Lineales 2-4. Matriz asociada a operaciones con Transformaciones lineales
Por ser lineales L1 y L2. . .
[u′1] = [L1] [u] , [u′2] = [L2] [u]
la suma es
[u′1] + [u′2] = [L1] [u] + [L2] [u] linealidad en L1, L2
= ([L1] + [L2]) [u] distr. matrices
el primer término no es más que la matriz de coordenadas de la suma de lasimágenes de u
([L1] + [L2]) [u] = [S (u)] = [u′s]
de modo que
[S] = [L1] + [L2] (2.9)
2-4.2. Escalamiento
Si la TL es L : V → V ′ | L(v) = v′, la función escalada se define comoLk : V → V ′ | Lk (v) = kv′. El proceso de prueba de que sí es lineal, y de cuántovale la matriz asociada te lo dejo por ser muy similar a las pruebas anteriores.En este caso
[Lk] = [k · L] = [Dk] [L]
donde [Dk] es una matriz diagonal con k en cada entrada en su diagonal.
2-4.3. Composición
En la composición de aplicaciones lineales, aplicamos la primera a un ele-mento v de V , y obtenemos un vector de v′ de V ′, al cual aplicamos la segunda,para obtener el vector v′′ que vive en el espacio V ′′. Lo anterior resulta equi-valente a aplicar la función compuesta al vector v para obtener directamenteel vector v′′, tal como se ve en el pictograma
V
V ′
V ′′
v
L1(v) = v′
L2(v′) = v′′
L1 L2
L2 ◦ L1
Figura 2.6: Composición de transformaciones lineales
42JOM - Transformaciones Lineales

2-4. Matriz asociada a operaciones con Transformaciones lineales Capítulo 2. Transformaciones Lineales
Recuerda que la notación es L2 (L1(v)) ≡ (L2 ◦ L1)(v). Por ser lineal L1
puedes escribir [v′] = [L1] [v], y por la misma razón [v′′] = [L2] [v′] de modo quefinalmente
[v′′] = [L2] [L1] [v]
¿Existe el producto [L2] [L1]?Claro que sí. Hagamos el análisis de compatibilidad dimensional:
[L1]m×n[v]n×1 = [v′]m×1 supuestos dim(V ) = n, dim(V ′) = m
[L2]q×m[v′]m×1 = [v′′]q×1 supuesto además dim(V ′′) = q
[L2]q×m[L1]
m×n = [L2 ◦ L1]q×n
JOM - Transformaciones Lineales
43

Capítulo 2. Transformaciones Lineales 2-4. Matriz asociada a operaciones con Transformaciones lineales
44JOM - Transformaciones Lineales

Capítulo 3
Transformaciones linealesisométricas
Resumen:
Nos centraremos en las transformaciones linea-
les dentro de un mismo espacio vectorial, en donde
el módulo del vector se preserva luego de transfor-
mado.
Como los espacios vectoriales estaban desprovis-
tos del concepto de módulos —una medida—, se los
dota de esa propiedad.
Este contenido viene a echar luz sobre lastransformaciones de rotación y reflexión aplicablesal mundo real, particularmente en la visión porcomputadora.-
45

Capítulo 3. Transformaciones lineales isométricas 3-1. Isometrías
3-1. Isometrías . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3-1.1. Propiedades de las TL Isométricas . . . . . . . . . . . . . 47
3-2.Rotación en el plano . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3-2.1. Rotación seguida de rotación . . . . . . . . . . . . . . . . . 51
3-3.Rotaciones en el espacio . . . . . . . . . . . . . . . . . . . . . . . . 53
3-1. Isometrías
Una transformación LINEAL tal como T : V → V |T (v) = v′ es isométricasi se cumple que
|T (v)| = |v′| = |v|
donde |v| significa módulo de v(1). Por ejemplo. . .
Ejemplo 3.1. Para la TL T((x, y)
)= (y, x), discute si es o no isométrica
pSi v = (x, y), su módulo será
|v| =√x2 + y2
y su transformada será v′ = (y, x), cuyo módulo es∣∣v′∣∣ =√y2 + x2 =
√x2 + y2 = |v|
Por tanto T efectivamente es una isometría.y
Ejemplo 3.2. Verifica que la matriz asociada a la transformación isométricaanterior es ortogonal, es decir todas sus columnas son versores normalesentre síp
La matriz asociada a la isometría anterior es [T ] = T ([I]) =
[0 1
1 0
].
Como (0, 1) · (1, 0) = 0 y además |(0, 1)| = |(1, 0)| = 1, resulta que [T ] esortogonal.y
Lo interesante de una matriz ortogonal es que su inversa es igual a sutraspuesta.
A−1 = A>
1O norma 2, que en otros libros verás como ‖v‖2 o simplemente ‖v‖. Para los espacios Rnexisten otras normas, como la norma 1(‖v‖1) y la norma infinito (‖v‖∞).
46JOM - Transformaciones Lineales

3-1. Isometrías Capítulo 3. Transformaciones lineales isométricas
Nota que la transformación de traslación también preserva la norma (eneste caso el módulo), pero no es una simetría porque no es lineal.
Una transformación isométrica preserva la norma, y sumatriz asociada es ortogonal.
3-1.1. Propiedades de las TL Isométricas
1. La matriz asociada a la transformación es ortogonal.Lo probaremos más adelante.
2. Las únicas transformaciones posibles son
• Una rotación
• Una reflexión
• Una combinación de las anteriores.
3. En una TL isométrica T , se da 2 que |T (u)− T (v)| = |u− v|
Tomemos un vector w = u− v, por ser T lineal es
T (w) = T (u)− T (v)
y por ser T isométrica es
|T (u)− T (v)| = |T (w)|= |w|= |u− v|
con lo que queda demostrado (y ya está)
Ejercicio 3.1. Descubre mediante transformar algunos vectores, si las trans-formaciones lineales isométricas encontradas son una refle-xión o una rotación. ¿Es eso de esperar?
Que las columas de [T ] deban ser versores es claramente entendible, por-que nada más son justamente las transformadas de la base canónica —al me-nos para Rn y otros espacios completos conocidos—, y el hecho de que porla isometría, conservan la norma. . . pero que sean ortogonales entre sí no estrivial. Probaremos entonces la ortogonalidad. . .
2−v = v′ —donde este v′ es el opuesto de v y no su mapeo— T (v′) = −T (v). (en otraspalabras: el transformado del opuesto es el opuesto del transformado).
JOM - Transformaciones Lineales
47

Capítulo 3. Transformaciones lineales isométricas 3-2. Rotación en el plano
Prueba
Si T es isometría, debe darse que
|T (v)| = |v|
pero como toda isometría es lineal, puede escribirse
|[T ] [ v ]| = |[ v ]|
como |[ v ]|2 = [ v ]> [ v ], podemos planear. . .
[ v ]> [ v ] =(
[ v ]> [T ]>)
([T ] [v])
= [ v ]> [T ]> [T ] [ v ]
que exige que se de la igualad
[T ]> [T ] = [I]
o lo que es lo mismo[T ]> = [T ]−1
que se cumple sólo si [T ] es ortogonal, es decir, todas sus columnas sonversores mutuamente normales.
Hemos probado la necesaria ortogonalidad de la matriz asociada a unaisometría, ahora sin la especulación anterior sobre los vectores de la basecanónica que valía solamente para espacios conocidos.
3-2. Rotación en el plano
Consideremos una transformación en el plano que rota cualquier vector,un ángulo determinado θ. Como se ve en la figura 3.1
X
Y
v
v′
θ
Figura 3.1: Transformación de rotación en el plano
La pregunta es:¿Cómo hacemos para encontrar la ley de la rotación?.
48JOM - Transformaciones Lineales
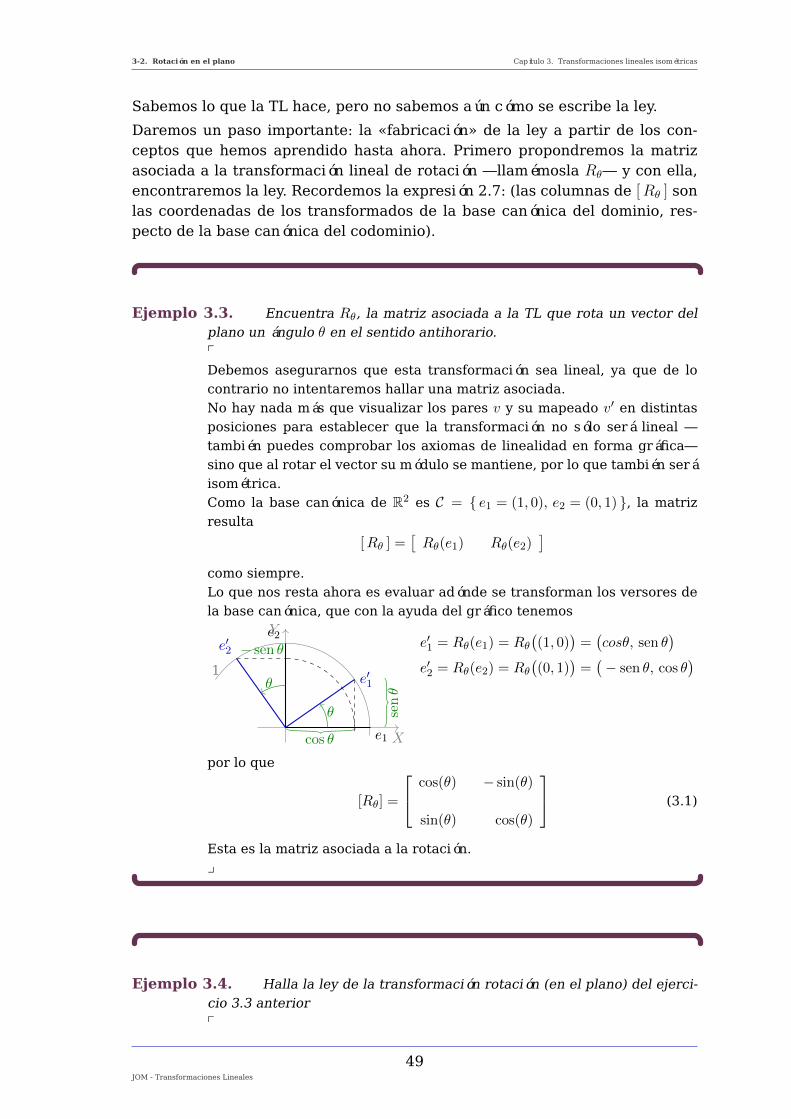
3-2. Rotación en el plano Capítulo 3. Transformaciones lineales isométricas
Sabemos lo que la TL hace, pero no sabemos aún cómo se escribe la ley.
Daremos un paso importante: la «fabricación» de la ley a partir de los con-ceptos que hemos aprendido hasta ahora. Primero propondremos la matrizasociada a la transformación lineal de rotación —llamémosla Rθ— y con ella,encontraremos la ley. Recordemos la expresión 2.7: (las columnas de [Rθ ] sonlas coordenadas de los transformados de la base canónica del dominio, res-pecto de la base canónica del codominio).
Ejemplo 3.3. Encuentra Rθ, la matriz asociada a la TL que rota un vector delplano un ángulo θ en el sentido antihorario.pDebemos asegurarnos que esta transformación sea lineal, ya que de locontrario no intentaremos hallar una matriz asociada.No hay nada más que visualizar los pares v y su mapeado v′ en distintasposiciones para establecer que la transformación no sólo será lineal —también puedes comprobar los axiomas de linealidad en forma gráfica—sino que al rotar el vector su módulo se mantiene, por lo que también seráisométrica.Como la base canónica de R2 es C = { e1 = (1, 0), e2 = (0, 1) }, la matrizresulta
[Rθ ] =[Rθ(e1) Rθ(e2)
]como siempre.Lo que nos resta ahora es evaluar adónde se transforman los versores dela base canónica, que con la ayuda del gráfico tenemos
X
Y
1
e1
e2
e′1
e′2
θ
θ
− sen θ
cos θ
senθ
e′1 = Rθ(e1) = Rθ((1, 0)
)=(cosθ, sen θ
)e′2 = Rθ(e2) = Rθ
((0, 1)
)=(− sen θ, cos θ
)
por lo que
[Rθ] =
cos(θ) − sin(θ)
sin(θ) cos(θ)
(3.1)
Esta es la matriz asociada a la rotación.y
Ejemplo 3.4. Halla la ley de la transformación rotación (en el plano) del ejerci-cio 3.3 anteriorp
JOM - Transformaciones Lineales
49

Capítulo 3. Transformaciones lineales isométricas 3-2. Rotación en el plano
Planteamos sencillamente el producto: [ v′ ] = [Rθ] [ v ], que en este caso es
[Rθ ] [ v ] =
[cos(θ) − sin(θ)
sin(θ) cos(θ)
] [v1v2
]
=
[v1 cos(θ)− v2 sen(θ)
v1 sen(θ) + v2 cos(θ)
]=[v′]
o sea que la ley puede expresarse
Rθ ((x, y)) =(x cos(θ)− y sin(θ) , x sen(θ) + y cos(θ)
)(3.2)
(es totalmente lícito reemplazar x↔ v1 e y ↔ v2.)y
Ejemplo 3.5. Rota la recta y = −2x+ 3 de manera que quede horizontalpTenemos varias posibilidades:la más inmediata es encontrar el ángulo a rotar —eso sería usar la «fuerzabruta3» —.Mejor no calcularemos el ángulo, sino el coseno y el seno del mismo, quees lo que necesitamos.- Usaremos el vector director u de la ecuación de la recta
u = (1,−2)
si la hemos de rotar en sentido contrario a las agujas del reloj nos conven-dría encontrar el coseno del ángulo que forma con el eje X+
(1, 0) · (1,−2) = 1
= 1 ·√
1 + 4 · cos(θ)
de donde
cos(θ) =1√5
de manera que
sin2(θ) = 1− cos2(θ)
= 1− 1
5=
4
5⇒ sin(θ) =
2√5
con lo que la matriz asociada a la rotación será
[Rθ] =
[ 1√5
− 2√5
2√5
1√5
]3El ángulo nos llevará a que la expresión del seno y del coseno casi siempre la tengamos
que aproximar, y con ello, propagar un error que podemos evitar.
50JOM - Transformaciones Lineales

3-2. Rotación en el plano Capítulo 3. Transformaciones lineales isométricas
que podemos escribir. . .
[Rθ] =1√5
[1 −2
2 1
]de manera que la recta rotada será[
r′]
= [Rθ ] [ r ]
=1√5
[1 −2
2 1
]·
[λ
−2λ+ 3
]
=1√5
[5λ− 6
3
]
=
x′
3√5
Entonces x′ puede ser cualquiera, pero que y′ =
3√5
, con lo que el vector
directo rotado es paralelo al eje X; —lo esperado— ya que la ecuacióny + 2x = 3 nos dice que la longitud de la normal es
3√5
=d√
a2 + b2
Es importante que encuentres Rθ en forma exacta, no con aproxima-ciones decimales. Es mejor que te persuadas que la aproximación en lacalculadora es el último paso y no el primero.y
Tratemos de explorar nuevos métodos para resolver los mismos problemas.Cada uno de nosotros tiene una manera de «hacer las cosas» , incluida lamatemática. La creatividad es siempre bienvenida. No nos conformemos conreproducir las sugerencias que damos cuando resolvemos un ejemplo; por elcontrario busquemos nuevos métodos y comparémoslos.
¿Rotarías la intersección de la recta con una normal que pasa por el origen?
3-2.1. Rotación seguida de rotación
Imaginemos que a un vector v lo rotamos mediante una transformación RA
de rotación un ángulo α, el vector v′ que se obtiene puede escribirse
[ v′ ] = [Rα ] [ v ] (3.3)
Imaginemos ahora que a ese vector ya rotado, se lo vuelve a rotar con la RB,pero un ángulo β, obteniéndose v′′, que podrá escribirse como
[ v′′ ] = [Rβ ] [v′] (3.4)
JOM - Transformaciones Lineales
51

Capítulo 3. Transformaciones lineales isométricas 3-2. Rotación en el plano
pero por la anterior relación tenemos que
[ v′′ ] = [Rβ ] [Rα ] [ v ] (3.5)
= [Rα+β] [ v ] (3.6)
y vemos que se ha hecho la composición de las dos rotaciones y la matriz derotación final es el producto de las matrices de rotación individual. Es impor-tante que notes el orden de la multiplicación.
v′′ = RB
(RA(v)
)⇓
[ v′′ ] = [Rβ ] [Rα ] [ v ]
Nota también la diferencia con que tratamos la transformación y su matrizasociada (RB y Rβ) respectivamente —aunque estrictamente no fuera necesa-rio, ya que es suficiente la diferencia de notación entre transformación Rα ymatriz asociada [Rα ]—.
Observa el pictograma de la figura 3.2, similar a la figura 2.6
V
V
V
v
RA(v) = v′
RB(v′) = v′′
RA RB
RB ◦RA
Figura 3.2: Composición de rotaciones
Ejercicio 3.2. Muestra que lo mismo sucede cuando se transforma v me-diante una transformación lineal cualquiera dada por la matrizasociada [T1] y luego se lo transforma por otra transformaciónlineal dada por la matriz asociada [T2].
Ejercicio 3.3. Muestra que, como caso particular,
[Rα+β] = [Rβ ] [Rα] = [Rα ] [Rβ ] = [Rβ+α ]
sucede sólo en el plano —y no en el espacio— Necesitas leeruna sección más para comparar lo que sucede en el espacio.
Recordemos del capítulo anterior que si hay una composición de transfor-maciones lineales T1 : V → V1 cuya matriz asociada es [T1], con T2 : V1 → V2,cuya matriz asociada es [T2], la composición de las dos se puede escribir como
T : V → V2 | [T ] = [T2] · [T1] (3.7)
52JOM - Transformaciones Lineales

3-3. Rotaciones en el espacio Capítulo 3. Transformaciones lineales isométricas
. . . que por otro lado es lógico si se piensa por ejemplo en las dimensiones delos espacios
dim (V ) = n dim (V1) = m y dim (V2) = p
las matrices de transición deberán ser de
[T1] ∈ Rm×n , [T2] ∈ Rp×m
de modo que [T ] = [T2] · [T1] tiene la dimensión correcta de p× n y se verifica
[ v′′ ]p×1
= [T ]p×n · [ v ]n×1
como es necesario.
3-3. Rotaciones en el espacio
En el espacio nos manejamos —en este libro— con una terna «a derechas» ,donde XYZXY es la regla mnemotécnica (de acuerdo con la figura 3.3(a)) paraencontrar los productos vectoriales: I×J = K, J×K = I, con esta regla hemosde deducir las rotaciones según los ejes X, Y y Z: tomaremos los ángulospositivos de manera que se mantenga esta convención.
X
Y
Z
θX
v
v′
θX
θZ
θY
(a) (b)
Y
Z
1
θX
θX
e2
e3
e′2
e′3
X
Figura 3.3: (a) Rotación en el espacio (b) Alrededor del eje X
En la figura 3.4 vemos el efecto que produce sobre el vector v una rotaciónsegún el eje X, pensemos en el eje X como el eje de un lápiz y saquémosle lapunta con el antiguo sacapuntas. Cualquier generatriz puede ser el vector vy todas las otras son v rotado por una transformación como la que estamosestudiando. El archivo rotax.m —en el apéndice B-5— la reproduce.
En la figura 3.3(b) tenemos la rotación sobre el eje X, y llamaremos RX ala matriz asociada a esta transformación
La base canónica de R3 es C3 = { e1 , e2 , e3 } ≡{ı , , k
}, y lo que haremos
es rotar los tres vectores según el ángulo θX —aplicando la ec.(2.7) pag.37—,con ello la matriz asociada es
RX =
1 0 0
0 cos(θX) − sin(θX)
0 sin(θX) cos(θX)
(3.8)
JOM - Transformaciones Lineales
53
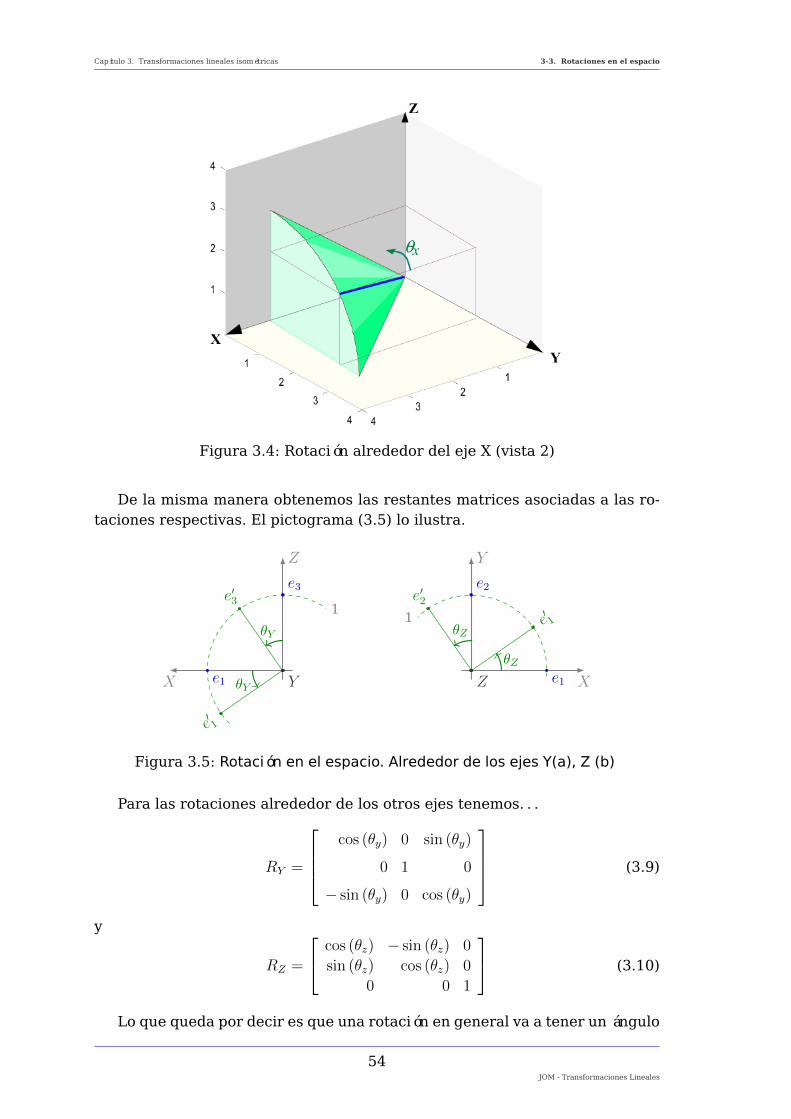
Capítulo 3. Transformaciones lineales isométricas 3-3. Rotaciones en el espacio
Figura 3.4: Rotación alrededor del eje X (vista 2)
De la misma manera obtenemos las restantes matrices asociadas a las ro-taciones respectivas. El pictograma (3.5) lo ilustra.
X
Z
1
θY
θYe1
e3
e′1
e′3
Y X
Y
1
θZ
θZ
e1
e2
e′1
e′2
Z
Figura 3.5: Rotación en el espacio. Alrededor de los ejes Y(a), Z (b)
Para las rotaciones alrededor de los otros ejes tenemos. . .
RY =
cos (θy) 0 sin (θy)
0 1 0
− sin (θy) 0 cos (θy)
(3.9)
y
RZ =
cos (θz) − sin (θz) 0
sin (θz) cos (θz) 0
0 0 1
(3.10)
Lo que queda por decir es que una rotación en general va a tener un ángulo
54JOM - Transformaciones Lineales
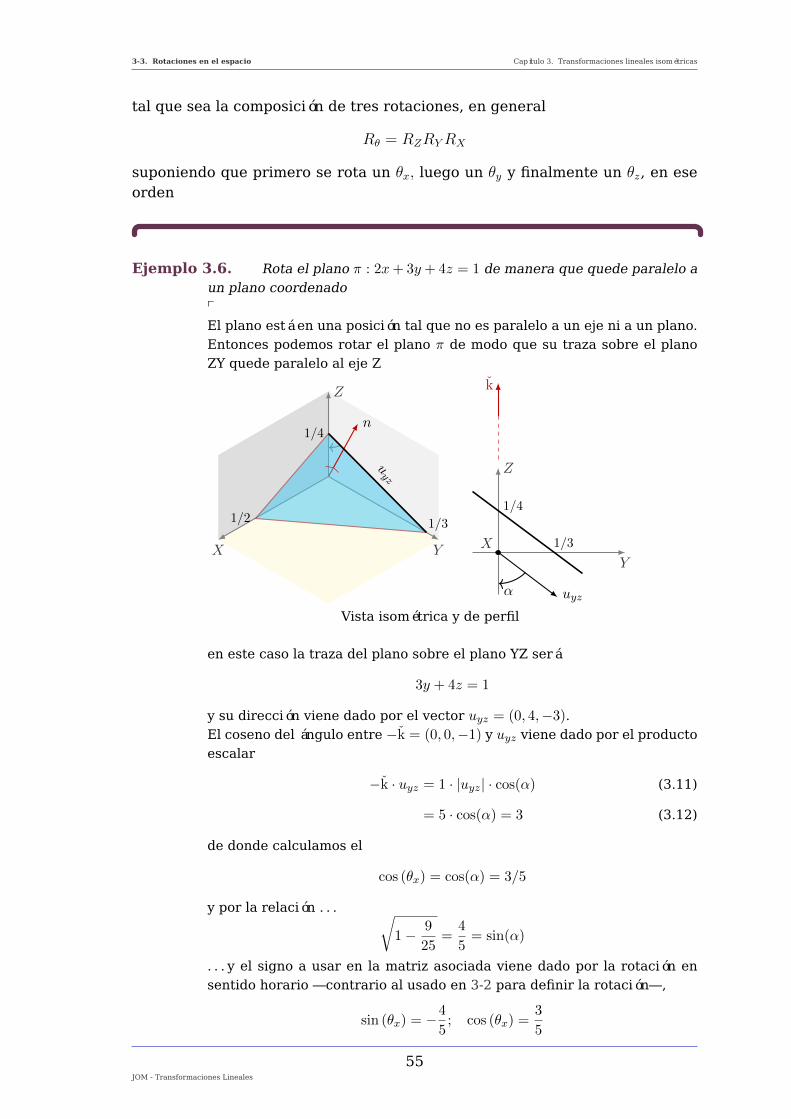
3-3. Rotaciones en el espacio Capítulo 3. Transformaciones lineales isométricas
tal que sea la composición de tres rotaciones, en general
Rθ = RZRYRX
suponiendo que primero se rota un θx, luego un θy y finalmente un θz, en eseorden
Ejemplo 3.6. Rota el plano π : 2x+ 3y + 4z = 1 de manera que quede paralelo aun plano coordenadopEl plano está en una posición tal que no es paralelo a un eje ni a un plano.Entonces podemos rotar el plano π de modo que su traza sobre el planoZY quede paralelo al eje Z
X Y
Z
nuyz
1/2
1/4
1/3
Y
Z
X
k
uyzα
1/3
1/4
Vista isométrica y de perfil
en este caso la traza del plano sobre el plano YZ será
3y + 4z = 1
y su dirección viene dado por el vector uyz = (0, 4,−3).El coseno del ángulo entre −k = (0, 0,−1) y uyz viene dado por el productoescalar
−k · uyz = 1 · |uyz| · cos(α) (3.11)
= 5 · cos(α) = 3 (3.12)
de donde calculamos el
cos (θx) = cos(α) = 3/5
y por la relación . . . √1− 9
25=
4
5= sin(α)
. . . y el signo a usar en la matriz asociada viene dado por la rotación ensentido horario —contrario al usado en 3-2 para definir la rotación—,
sin (θx) = −4
5; cos (θx) =
3
5
JOM - Transformaciones Lineales
55

Capítulo 3. Transformaciones lineales isométricas 3-3. Rotaciones en el espacio
Conociendo esto ya conocemos RX (por la 3.8).Efectuamos la rotación θx al plano, por ejemplo
π′ =
1 0 0
0 35
45
0 −45
35
x
y
1− 2x− 3y
4
=
x
15 −
25x
320 −
310x−
54y
=
λ
1− 2λ
5µ
de donde el plano rotado es ahora
π′ : 5y′ + 2x′ = 1; z ∈ R
Con lo que podemos obtener la ecuación de la nueva posición del planoque, obviamente a causa de la rotación va a ser paralelo al eje Z, por loque
X Y
Z
u′xy1/2
1/5
1/3 X
Y
Z
u′xyβ
1/2
1/5
Vistas luego de la primera rotación
u′xy = (5,−2, 0)
Además de una traza sobre el plano XY, dada por la dirección u′xy, la cualrotaremos nuevamente pero según el eje Z, con un ángulo cuyo cosenoestará dado por el producto u′xy · I, en forma similar a lo que ya hicimos.
ı · uxy = 1 ·∣∣u′xy∣∣ · cos(β)
=√
29 · cos(β) = 5 entonces
cos (θZ) =5√29
; sin (θZ) =2√29
con lo que la matriz asociada a la rotación alrededor del eje Z es
RZ =
5√29− 2√
290
2√29
5√29
0
0 0 1
56
JOM - Transformaciones Lineales

3-3. Rotaciones en el espacio Capítulo 3. Transformaciones lineales isométricas
y el plano rotado es
π′′ =
5√29− 2√
290
2√29
5√29
0
0 0 1
λ
1− 2λ
5µ
haciendo la cuenta
π′′ =
√295 λ− 2
√29
145√2929
µ
=
x′′
√2929
z′′
Con ello el plano rotado dos veces tendrá la forma
π′′ : y′′ =
√29
29, x′′, z′′ ∈ R
..que es paralelo al eje ZX, que es una posible respuesta.ypHaciéndolo de una sola vez. . . la matriz asociada a la transformación pedi-da es entonces
Rθ = RZ ·RX =
5√29− 6
5√29− 8
5√29
2√29
3√29
4√29
0 −45
35
y la rotación «sucesiva» del plano π queda
π′′ =
5√29− 6
5√29− 8
5√29
2√29
3√29
4√29
0 −45
35
x
y1− 2x− 3y
4
efectuando la cuenta tenemos
π′′ =1
20√
29
116x− 8
20√29(−6x− 25y + 3)
que no es otra cosa que
π′′ =
x′′
√2929
z′′
donde claramente se ve que la segunda componente es constante y elplano rotado puede escribirse
π′′ : y =1
29
√29
tal como se pedía.El gráfico muestra las secuencias
JOM - Transformaciones Lineales
57
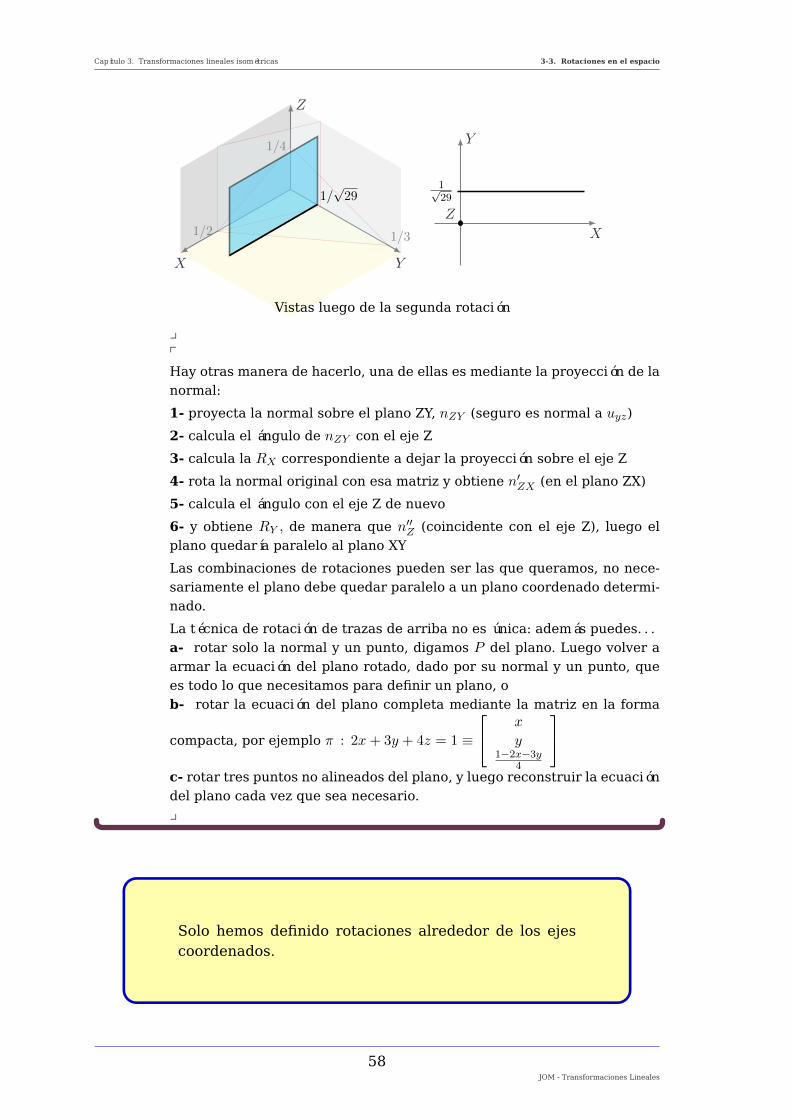
Capítulo 3. Transformaciones lineales isométricas 3-3. Rotaciones en el espacio
X Y
Z
1/2
1/4
1/√
29
1/3 X
Y
Z
1√29
Vistas luego de la segunda rotación
ypHay otras manera de hacerlo, una de ellas es mediante la proyección de lanormal:
1- proyecta la normal sobre el plano ZY, nZY (seguro es normal a uyz)
2- calcula el ángulo de nZY con el eje Z
3- calcula la RX correspondiente a dejar la proyección sobre el eje Z
4- rota la normal original con esa matriz y obtiene n′ZX (en el plano ZX)
5- calcula el ángulo con el eje Z de nuevo
6- y obtiene RY , de manera que n′′Z (coincidente con el eje Z), luego elplano quedaría paralelo al plano XY
Las combinaciones de rotaciones pueden ser las que queramos, no nece-sariamente el plano debe quedar paralelo a un plano coordenado determi-nado.
La técnica de rotación de trazas de arriba no es única: además puedes. . .a- rotar solo la normal y un punto, digamos P del plano. Luego volver aarmar la ecuación del plano rotado, dado por su normal y un punto, quees todo lo que necesitamos para definir un plano, ob- rotar la ecuación del plano completa mediante la matriz en la forma
compacta, por ejemplo π : 2x+ 3y + 4z = 1 ≡
x
y1−2x−3y
4
c- rotar tres puntos no alineados del plano, y luego reconstruir la ecuacióndel plano cada vez que sea necesario.y
Solo hemos definido rotaciones alrededor de los ejescoordenados.
58JOM - Transformaciones Lineales
Capítulo 4
Autovalores y Autovectores
Resumen:
Cuando tratamos con transformaciones lineales
de un espacio en sí mismo, la matriz asociada re-
sulta cuadrada.
En este capítulo intentaremos estudiar el com-
portamiento de ese tipo de transformaciones linea-
les a través del estudio del comportamiento de la
matriz asociada cuadrada. En otras palabras: el es-
tudio de propiedades específicas de las matrices de
n × n revela conocimiento aplicable a las transfor-
maciones lineales cuando los conjuntos subyacen-
tes de los espacios dominio y codominio son el mis-
mo —y de dimensión n—.
Este contenido es uno de los que mas has de usaren otras asignaturas de ingeniería, vale para loscursos de mecánica racional, como los de ecuacio-nes diferenciales o los de ecuaciones a diferencias,etcétera.-
59

Capítulo 4. Autovalores y Autovectores 4-1. Introducción: Mapeo en el plano
4-1. Introducción: Mapeo en el plano . . . . . . . . . . . . . . . . . . . 60
4-2.Autovalores y Autovectores . . . . . . . . . . . . . . . . . . . . . . 63
4-2.1. Cálculo de autovalores . . . . . . . . . . . . . . . . . . . . 64
4-2.1.1. Existencia . . . . . . . . . . . . . . . . . . . . . . . 65
4-2.1.2. Multiplicidad . . . . . . . . . . . . . . . . . . . . . 65
4-2.1.3. Autovalores en matrices triangulares . . . . . . . 66
4-2.2. Cálculo de autovectores . . . . . . . . . . . . . . . . . . . 66
4-2.2.1. Autovalor y autovector de la matriz escalada . . . 68
4-2.2.2. Autovectores linealmente independientes . . . . . 69
4-2.3. Autovalores repetidos . . . . . . . . . . . . . . . . . . . . . 70
4-2.4. Matrices simétricas . . . . . . . . . . . . . . . . . . . . . . 74
4-2.4.1. Autovectores mutuamente normales . . . . . . . . 75
4-2.5. Resultados a tener en cuenta . . . . . . . . . . . . . . . . . 77
4-3.Matrices similares . . . . . . . . . . . . . . . . . . . . . . . . . . . . 78
4-3.1. Propiedad de las matrices similares . . . . . . . . . . . . . 79
4-1. Introducción: Mapeo en el plano
Nos centraremos en el estudio de algunas características interesantes delas matrices cuadradas Rn×n(1). La razón: estudiando las características de lasmatrices, podemos sacar valiosas conclusiones acerca de las transformacio-nes lineales, ya que éstas admiten matrices asociadas. Como trabajamos par-ticularmente con matrices cuadradas, y las conclusiones que saquemos seráválidas para transformaciones lineales dentro de un mismo espacio vectorial.Empecemos con un ejemplo
Ejemplo 4.1. Para la matriz A =
[1 2
2 1
], hallemos los transformados de los
vectores (2, 2), (2, 1), (1,−1), (−2, 2), y (1, 1)
pEs tedioso tener que hacer[
1 2
2 1
]·
[2
2
]=
[6
6
]y luego
[1 2
2 1
]·
[2
1
]=
[4
5
]es decir
1Aunque el concepto matemático es el mismo para espacios que comparten escalares com-plejos, el abordaje geométrico que haremos aquí, nos permite referimos exclusivamente aescalares reales.
60JOM - Transformaciones Lineales

4-1. Introducción: Mapeo en el plano Capítulo 4. Autovalores y Autovectores
básicamente la misma cuenta para cada vector. Es más sencillo hacerlo«en masa»[
1 2
2 1
][2 2 1 −2 1
2 1 −1 2 1
]=
[6 4 −1 2 3
6 5 1 −2 3
]⇓
[A ][v1 v2 v3 v4 v5
]=[v′1 v′2 v′3 v′4 v′5
]Recuerda que podemos pensar que A, está asociada —por ejemplo— a latransformación lineal A : R2 → R2 | A ((x, y)) = (x+ 2y , 2x+ y)
y
Nota que estamos usando A para definir una matriz, y no el correcto [A ].Esta práctica de abuso de notación en aras de la simplicidad es común enmuchos textos de álgebra lineal.
Ejemplo 4.2. Ahora grafiquemos cada vector con su transformado, un par porcada gráfico. . .p
X
Y
v3
v′3
X
Yv4
v′4
Observa que v′3 es colineal con v3, y lo mismo sucede entre v′4 y v4.lo mismo vale para los siguientes v1 y v5, que en este caso noson opuestos y el gráfico de la izquierda está a una escala menor.
6√ 2
X
Y v′1
v1
1
1
2
2
3
3
4
4
5
5
6
6
3√ 2
X
Yv′5
v5
1
1
2
2
3
3
y
Hasta ahora hemos transformado algunos vectores y comprobamos quealgunos pares vector - vector transformado son co-lineales, mientras que otrosno. Ahondemos un poco más en la co-linealidad. . .
¿Es probable que los vectores co-lineales a través de la transformación tenganalgo más en común?
JOM - Transformaciones Lineales
61

Capítulo 4. Autovalores y Autovectores 4-1. Introducción: Mapeo en el plano
Ejemplo 4.3. Tratemos de expresar vectores y transformados co-lineales me-diante un escalamiento de los vectores de partida.pPodemos expresar los coeficientes como si extrayendo factor común, yaque ello está permitido entre las matrices[
v′1∣∣ v′2∣∣ v′3∣∣ v′4∣∣ v′5
]=
[6
6
∣∣∣∣ 4
5
∣∣∣∣ −1
1
∣∣∣∣ 2
−2
∣∣∣∣ 3
3
]
=
[3
2
2
∣∣∣∣ 4
5
∣∣∣∣ −11
−1
∣∣∣∣ −1−2
2
∣∣∣∣ 31
1
]=
[3v1
∣∣∣ v′2 ∣∣∣ −1v3
∣∣∣ −1v4
∣∣∣ 3v5
]Pongamos los vectores que son co-lineales2 con sus transformados,
T ( v ) = v′ = λ v
T ( (2, 2) ) = (6, 6) = 3 (2, 2)
T ( (1,−1) ) = (−1, 1) = −1 (1,−1)
T ( (2,−2) ) = (−2, 2) = −1 (2,−2)
T ( (1, 1) ) = (3, 3) = 3 (1, 1)
y reordenando
v′1 = 3v1
v′5 = 3v5
v′3 = −v3v′4 = −v4
pero también hay vectores que no son co-lineales con sus transformados,por ejemplo
v2 =
[2
1
]∦ v′2 =
[4
5
]Nota que siempre ocurrirá que v = (0, 0) = v′ pero como el vector nulono tiene dirección —o mejor, tiene cualquier dirección—, es inútil esperarque su transformado conserve su dirección, por tanto no nos interesaráel caso v = θ
y
El archivo geogebra Autovalores-01.ggb3 tiene tres puntos del plano —v1, v, v3 y sus transformados— donde v puede ubicarse en cualquier lado, y losotros pueden moverse en su dirección fija correspondiente. Los transformadosde v1 y v5 —comparten una dirección— se escalan por −1 (fijo); y los de v3 y v4—que comparten la otra dirección—:se escalan por 3, también fijo.
Esos números fijos por cada dirección, los llamamos con la letra griega λ
y decimos que son valores característicos o autovalores, y los vectores conquienes los cumplen, vectores característicos o autovectores.
2Esta idea —repetimos— vale sólo para matrices y vectores reales.3Puedes pedírmelo por correo electrónico: omar punto morel arroba gmail punto com
62JOM - Transformaciones Lineales

4-2. Autovalores y Autovectores Capítulo 4. Autovalores y Autovectores
Así en los ejemplos anteriores donde A =
[1 2
2 1
], v1 y v5 son vectores ca-
racterísticos —autovectores— asociados al valor característico –autovalor—λ = 3, mientras que v3 y v4 son vectores característicos asociados al valorcaracterístico λ = −1.
Ese comportamiento es común a otras matrices cuadradas 4. En ocasionesel número λ es un complejo5 aunque la matriz tenga todas sus entradas reales—no vamos a extendernos a ellos en este libro—.
Lo importante es que dada una matriz cuadrada cualquiera, ésta tiene —indefectiblemente— esos números característicos λ, sean reales o complejos,o algunos reales y otros complejos. Y lo probaremos más delante en la sub-sección 4-2.1.1
4-2. Autovalores y Autovectores
Decíamos que el número característico también se llama autovalor (delalemán Eigenvektor) o valor característico de la matriz. Y los vectores asocia-dos a esos autovalores se llaman autovector(es) (del alemán Eigenwert(en) )o vectores característicos.En un caso general se tiene que
Av = λv (4.1)
para un par autovalor-autovector (λ , v). Con esto, la definición de autovalory autovector queda de la siguiente manera:
Definición 1. Para una matriz A cuadrada de dimensiones, un vector no nuloes autovector si satisface la relación Av = λv; en otras palabras: si él mismoy su transformado forman un conjunto linealmente dependiente6: { v , A v } esLD.
Repitamos que los autovectores no pueden ser los vectores nulos.
La pregunta es:¿Cómo calculamos los valores característicos de una matriz?
4Prueba por ejemplo la matriz B =
1 1 −1
0 2 2
0 0 3
con los vectores v1 =
a
0
0
, v2 =
b
b
0
y v3 =
c
4c
2c
y sus co-lineales.
5Puedes probar con lo que aprendas más adelante que los autovalores de la matriz
B =
2 1 0
−1 2 0
0 0 3
son λ1 = 2 + j , λ2 = 2− j y λ3 = 3
6Esto elimina la ambigüedad que supone la definición por co-linealidad entre el autovectory su transformado, cuando el autovalor asociado es cero. Es evidente en ese caso que trans-formado y autovector no son co-lineales, sino normales entre sí. Con más razón cuando A o λno fueran reales.
JOM - Transformaciones Lineales
63

Capítulo 4. Autovalores y Autovectores 4-2. Autovalores y Autovectores
4-2.1. Cálculo de autovalores
Partamos de la definición: Av = λv. Entonces7
λv − Av = θ Definición
Como A es una matriz y λ es un escalar, debemos multiplicar λ por la matrizidentidad del mismo orden que A para poder escribir
(λI − A) v = θ (4.2)
y este es un sistema de ecuaciones lineales homogéneo que, por lo que hemosestudiado anteriormente, indefectiblemente tiene solución. Pero naturalmen-te, si no nos interesa la solución trivial v = θ, la única posibilidad para quehaya otras soluciones es que (λI − A) no sea invertible, es decir que
|λI − A| = 0 Ec. característica (4.3)
Con esta ecuación hemos de calcular los autovalores, se llama ecuación ca-racterística8 de A
Ejemplo 4.4. Halla los autovalores de la matriz A =
[1 2
2 1
]pEfectuando las cuentas que dadas por la ec.(4.3)
|λI −A| =
∣∣∣∣[ λ 0
0 λ
]−[
1 2
2 1
]∣∣∣∣=
∣∣∣∣[ λ− 1 0− 2
0− 2 λ− 1
]∣∣∣∣= (λ− 1) (λ− 1)− 4
= λ2 − 2λ− 3
= πA (λ) (4.4)
Y éste es lo que se conoce como el polinomio característico de A—nota que la 4.4 tiene la estructura típica de p(x) = −3− 2x+ x2—.De él vamos a obtener los autovalores de A
πA (λ) = |λI −A|= λ2 − 2λ− 3
= (λ− 3) (λ+ 1)
7Ten en cuenta que tanto λv cuanto Av yacen en el mismo espacio vectorial, ya que A escuadrada.
8Algunos autores usan la forma equivalente |A− λI| = 0, de ese modo el polinomio re-sultante será mónico para A con dimensión par y no mónico para A con dimensión impar;mientras que en la forma que hemos optado nosotros, el polinomio resulta siempre mónico.Un polinomio es mónico cuando el coeficiente de la variable de mayor grado es 1.
64JOM - Transformaciones Lineales

4-2. Autovalores y Autovectores Capítulo 4. Autovalores y Autovectores
de donde finalmente
λ1 = +3
λ2 = −1
donde los preordenamos con los valores absolutos decrecientes.y
La ecuación característica es el polinomio característi-co igualado a cero. Sus raíces son los autovalores de lamatriz.
4-2.1.1. Existencia
¿Tendrá cualquier matriz autovalores? ¿Cuántos?
Como ellos aparecen como raíz de un determinante igualado a cero, la ma-triz debe ser cuadrada. Analiza el grado de los polinomios característicos deestas matrices y combínala con la información —teorema fundamental del ál-gebra9— de que todos los polinomios de grado n tienen n raíces.
El polinomio característico de una matriz cuadrada de entradas reales tie-ne todos sus coeficientes reales, y como consecuencia, sus raíces podrán serreales o, de aparecer raíces complejas, lo harán de a pares conjugados.
4-2.1.2. Multiplicidad
Es sabido que las raíces de un polinomio pueden repetirse. Como el poli-nomio característico de una matriz es el que provee los autovalores, podemosestablecer que un autovalor puede repetirse, es decir: puede tener multiplici-dad algebraica.
Ejemplo 4.5. Halla los autovalores de la matrices B =
[1 0
0 1
]y C =
[2 1
0 2
]p
9Un polinomio en una variable, no constante y con coeficientes complejos o reales, tienetantas raíces como indica su grado, contando las raíces con sus multiplicidades.
JOM - Transformaciones Lineales
65
Capítulo 4. Autovalores y Autovectores 4-2. Autovalores y Autovectores
Efectuando las cuentas necesarias
πB(λ) = (λ− 1)2
πC(λ) = (λ− 2)2
Vemos que los autovalores se repiten —El autovalor 1 para la matriz Btiene multiplicidad algebraica 2—y
Un autovalor que no se repite, se dice que es simple (multiplicidad alge-braica 1).
4-2.1.3. Autovalores en matrices triangulares
Proposición 4.1. Cuando la matriz es triangular, los autovalores están en ladiagonal.
Prueba
Es evidente que si T es una matriz triangular de dimensiones genéricasla matriz λI − T = Tλ también lo será.Asimismo las entradas en la diagonal de Tλ tendrán la forma (λ − ti,i),por lo que el determinante —el polinomio característico de la matriz T—será
det(Tλ) = πT (λ) =n∏i=1
(λ− ti,i)
cuyas raíces ya están factorizadas, λi = ti,i
Como consecuencia o corolario, podemos afirmar que lo mismo sucede pa-ra matrices diagonales. Más estudios sobre autovalores los tienes en el apén-dice D-2.
4-2.2. Cálculo de autovectores
Para encontrar los autovectores, partamos también de (λI − A) v = θ luegode haber calculado los autovalores. En la ec.(4.2) hagamos λiI − A = Ai yentonces
Ai vi = θ (4.5)
Debemos resolver este sistema homogéneo para cada valor de λi y encontrarlos autovectores vi asociados a cada autovalor.
66JOM - Transformaciones Lineales

4-2. Autovalores y Autovectores Capítulo 4. Autovalores y Autovectores
Ejemplo 4.6. Halla los autovectores de de la matriz A =
[1 2
2 1
].
pDel ejemplo anterior (4.4), los autovalores son λ1 = 3 y λ2 = −1. Paracalcular los autovectores, usemos la expresión (4.2) o la (4.5), proponiendo
que λ1 = 3, v1 =
[v11v21
]∈ R2, entonces:
[3− 1 0− 2
0− 2 3− 1
] [v11v21
]=
[0
0
][
2 −2
−2 2
] [v11v21
]=
[0
0
]desarrollando la matriz de los coeficientes aumentada (para recordar)∣∣∣∣ 2 −2 0
−2 2 0
∣∣∣∣→ ∣∣∣∣ 2 −2 0
0 0 0
∣∣∣∣→ ∣∣∣∣ 1 −1 0
0 0 0
∣∣∣∣⇓
v11 − v21 = 0⇔ v21 = v11
es decir que para el autovalor λ1 = 3, hemos obtenido una familia de
autovectores asociados dada por v1 =
[v11v11
]. Lo notaremos de la siguiente
manera:A :
{ (3, (x, x)
) }x 6= 0
Si le diéramos a v11 el valor 1, obtendríamos v21 = 1 y el autovector aso-
ciado elegido sería v1 = (1, 1) =
[1
1
], y lo notamos:
(3 , (1, 1)
)Verifiquemos que sea correcto. Debe cumplirse la (4.1)...[
1 2
2 1
] [1
1
]=
[3
3
]= 3
[1
1
], cierto.
Una conclusión valedera en este contexto, sería establecer que como he-mos propuesto un valor específico para la componente v11 y pudiéramoshaber propuesto cualquier otro real (distinto de cero), el autovector v1pudo haber sido otro de la misma dirección; entonces el par autovalor -autovector asociado que dimos arriba en realidad es un representante delos infinitos autovectores que yacen en esa dirección. Y éste es el subes-pacio asociado al autovalor λ1 = 3, Eλ=3 =
{ (x, x
) }Procedamos de la misma manera para encontrar los autovectores asocia-dos a λ2 = −1 [
−2 −2
−2 −2
] [v12v22
]=
[0
0
]⇓
v2 =
[v12−v12
]
JOM - Transformaciones Lineales
67

Capítulo 4. Autovalores y Autovectores 4-2. Autovalores y Autovectores
y Eλ=1 = { (x,−x) } es el subespacio asociado. Por lo que finalmente
A :{ (
3, (x, x)),(− 1, (x,−x)
) }x 6= 0
A :{ (
3, (1, 1)),(− 1, (1,−1)
) }La última muestra la matriz y un autovector asociado a cada autovalor,mientras que la primera muestra todos los autovectores asociados a cadaautovalor.y
4-2.2.1. Autovalor y autovector de la matriz escalada
Supongamos que la matriz A admite un par autovalor-autovector tal como(λ, v), estudiaremos qué sucede con los autovalores y autovectores de la matrizE = kA donde k es un escalar.
Ejemplo 4.7. Si A : { (λi, vi) } ¿cuál será el par de kA, k escalar?pSabemos que vi es elemento de un espacio vectorial, —en este libro pode-mos pensar el evre V = Rn— donde se da que Avi = λi vi
(kA) vi = k(Avi) propiedad matrices
= k(λi vi) expresado arriba
= (kλi) vi axioma espacio V
entonces podemos afirmar que (kA) yA comparten los autovectores, mien-tras que los autovalores de kA son los escalados de los de A.y
El resultado anterior puede parecerte no convincente, por cuanto el de-terminante de la matriz escalada tiene la relación det(kA) = kn det(A) ydet(kA) 6= k det(A) por lo que es necesario que hagamos otro ejemplo nu-mérico para confirmarlo
Ejemplo 4.8. Halla los autovalores y autovectores de B =
[4 8
8 4
].
pEsta matriz es 4 veces la del ejemplo 4.6 y ejemplo 4.6 —B = 4A, dondeA :
{ (3, (x, x)
),(− 1, (x,−x)
) }—, calculemos su polinomio característico
de B
πB=4A(λ) = (λ− 4)2 − 64
= λ2 − 8λ− 48
= (λ− 12)(λ+ 4)⇒ λ1 = 4 · 3 , λ2 = 4(−1)
68JOM - Transformaciones Lineales

4-2. Autovalores y Autovectores Capítulo 4. Autovalores y Autovectores
con lo cual hemos confirmado la relación entre autovalores. Ahora pode-mos simplemente probar si los autovectores se comparten[
4 8
8 4
] [x
x
]=
[12x
12x
]
= 12 ·[x
x
]lo podemos hacer para el otro par a-a,
A :{ (
3, (x, x)),(− 1, (x,−x)
) }⇒ 4A :
{ (12, (x, x)
),(− 4, (x,−x)
) }lo cual puedes comprobar.y
4-2.2.2. Autovectores linealmente independientes
La cantidad de autovectores asociados a un autovalor es infinita, porquetodos los autovectores co-lineales con uno dado —excepto el vector nulo—,también lo es. Prueba de ello es el resultado que hemos obtenido en el ejem-plo 4.6, donde por ejemplo para el autovalor 3[
1 2
2 1
] [x
x
]= 3
[x
x
]son autovectores todos los puntos de la recta y = x, con la única excepcióndel origen. Todos ellos está en una misma dirección, también llamada auto-dirección asociada al autovalor simple λ = 3
El autovalor está asociado a un subespacio de Rn —volvemos a suponer quetrabajamos con autovectores reales— donde todos los vectores son autovecto-res —excepto el vector nulo—. La dimensión de ese subespacio es la cantidadde autovectores linealmente independientes (multiplicidad geométrica).
Proposición 4.2. Si un autovector v0 está asociado a un autovalor λ0, el par(λ0, k v0) también es un par autovalor-autovector, (siempre que k 6= 0, natural-mente).
Ejercicio 4.1. Prueba la aseveración anterior. Ayuda: En Av0 = λ0v0 comienza por
multiplicar todo por el escalar k.
Cuando se calculan autovectores, se exhiben los auto-vectores linealmente dependientes ligados a un auto-valor.
JOM - Transformaciones Lineales
69

Capítulo 4. Autovalores y Autovectores 4-2. Autovalores y Autovectores
Ejemplo 4.9. Discute estos pares de autovalor-autovector cambiando A delejemplo 4.1 por la matriz identidad de la misma dimensión.pLas cuentas para el cálculo de los autovalores y autovectores quedan para
tí. Puedes comprobar que como
[1 0
0 1
] [x
y
]=
[x
y
], lo que está sucediendo
es que:
– cualquier vector del plano —por última vez: excepto el vector nulo— esautovector de la matriz identidad, asociado al único autovalor λ = 1 quese repite —grado de multiplicidad algebraica 2—. En otras palabras: tene-mos una infinidad de vectores en infinitas direcciones asociados al mismoautovalor– el subespacio asociado al autovalor 1 es Eλ=1 = { (x, y) } y su dimensiónes 2 (su multiplicidad geométrica es 2).Pudiéramos encontrar una base con dos autovectores de ese espacio:
v11 =
[1
0
]y v12 =
[0
1
].
y
Entonces podemos decir que cada autovalor está asociado un subespaciode «autovectores10» , y que aparentemente su dimensión puede tener algo quever con la multiplicidad algebraica de ese autovalor.En otras palabras: queremos saber si hay alguna relación entre la multiplici-dad algebraica (cantidad de veces que un autovalor se repite) y la multiplici-dad geométrica (dimensión del espacio asociado a ese autovalor.).
4-2.3. Autovalores repetidos
La pregunta es:
¿Qué deberíamos esperar hay valores característicos repetidos?
En el ejemplo 4.9 hemos tratado con una matriz que tenía un autovalor demultiplicidad dos, asociado a un espacio de dos dimensiones —de cual pudi-mos exponer dos vectores linealmente independientes—, esto podría hacernossuponer que la dimensión del subespacio de autovectores asociados a un auto-valor coincide con su grado de multiplicidad. Veamos si es correcto medianteotro ejemplo.
10Claramente no es un sub- espacio de autovectores, ya que le faltaría justamente el vectornulo, pero aún asi es un subespacio Eλ = { vλ|Avλ = λvλ }
70JOM - Transformaciones Lineales

4-2. Autovalores y Autovectores Capítulo 4. Autovalores y Autovectores
Ejemplo 4.10. Halla los autovalores y autovectores de A =
[1 1
0 1
].
pLuego de hacer las cuentas —o en forma evidente aplicando la proposición4.1— λ1 = λ2 = 1, por lo que los autovectores saldrán de[
0 −1
0 0
] [v11v21
]=
[0
0
]de donde v11 es libre —puede tomar cualquier número— y v21 = 0, por loque
v1 =
[1
0
]A : {(1 , (1, 0))}
De modo que cuando quieras encontrar v2, éste será un escalado de v1y
Ahora hemos visto un caso donde la cantidad de autovectores no co-linealeses menor que la multiplicidad del autovalor asociado. Podemos especular, deacuerdo con nuestra experiencia que: “La cantidad q de autovectores lineal-mente independientes asociados a un autovalor es menor o igual a la multipli-cidad m del autovalor.”
Otro ejemplo con una matriz de 3×3 nos aclara aún más la pregunta inicial.
Ejemplo 4.11. Halla los autovalores y autovectores de la matriz A = 7 −16 −8
−16 7 8
−8 8 −5
pCalculemos los autovalores. . .
πA(λ) = |λI−A|
=
∣∣∣∣∣∣ λ− 7 16 8
16 λ− 7 −8
8 −8 λ+ 5
∣∣∣∣∣∣ eliminemos -8 con 8
=
∣∣∣∣∣∣ λ− 7 16 8
λ+ 9 λ+ 9 0
8 −8 λ+ 5
∣∣∣∣∣∣ propiedad determinantes
= (λ+ 9)
∣∣∣∣∣∣ λ− 7 16 8
1 1 0
8 −8 λ+ 5
∣∣∣∣∣∣JOM - Transformaciones Lineales
71

Capítulo 4. Autovalores y Autovectores 4-2. Autovalores y Autovectores
hemos calculado una raíz prontamente
πA(λ) = (λ+ 9)
{−∣∣∣∣[ 16 8
−8 λ+ 5
]∣∣∣∣+
∣∣∣∣[ λ− 7 8
8 λ+ 5
]∣∣∣∣ }= (λ+ 9)
(λ2 − 18λ− 243
)= (λ+ 9)
((λ+ 9)(λ− 27)
)Esta técnica funciona en ciertos casos de simetría. En un caso generalhubieras arribado a un polinomio característico de tercer grado, y paraencontrar sus raíces puedes usar un algoritmo numérico, como el que apa-rece en la última parte de D-3.0.2 en la pág.166 (apéndice).En definitiva, los autovalores son
λ1 = 27
λ2 = λ3 = −9
Calculemos entonces el o los autovectores asociados a λ2 = λ3 = −9 −16 16 8
16 −16 −8
8 −8 −4
v12 v13v22 v23v32 v33
=
0 0
0 0
0 0
A2,3 v2,3 = θ
donde hemos ubicado los dos sistemas. Los renglones de la matriz de loscoeficientes son escalamientos del último, por lo que −16 16 8 0
16 −16 −8 0
8 −8 −4 0
7→ 0 0 0 0
0 0 0 0
−2 2 1 0
cuyo significado es
−2v12 + 2v22 + v32 = 0 ≡(− 9, (v12, v22, 2v12 − 2v22)
)(4.6)
En la que hay dos grados de libertad. Como una dirección —un autovec-tor define una dirección— tiene un grado de libertad; puedes extraer dosdirecciones linealmente independientes. Por ejemplo
A :{ (− 9 , (v12, 0, 2v12)
),(− 9 , (0, v22,−2v22)
) }Y puedes elegir en particular
v2 = (1, 0, 2) v3 = (0, 1,−2)
El otro autovector asociado a λ = 27 , ya sabes cómo calcularlo y quedacomo ejercicio.
A : {(−9 , (1, 0, 2)) , (−9 , (0, 1,−)) , (27 , (−2, 2, 1))}
−9 tiene multiplicidad algebraica y geométrica 2, mientras que 27 tienemultiplicidad algebraica y geométrica 1.y
72JOM - Transformaciones Lineales

4-2. Autovalores y Autovectores Capítulo 4. Autovalores y Autovectores
Ha sido otro caso donde la multiplicidad geométrica es igual a la multipli-cidad algebraica en cada caso. Lo mismo ocurre en el ejemplo siguiente
Ejemplo 4.12. Para la matriz nula de 2×2, hallar los autovalores y autovectoresasociadospEn este caso —lo mismo que la matriz identidad— podemos ver que hayun autovalor con multiplicidad dos, λ1 = λ2 = 0, pero como[
0 0
0 0
] [x
y
]=
[0
0
]= 0
[x
y
]lo cual significa que no importa cuál dirección tome, siempre se dará que(x, y) será un autovector.Pero también estamos poniendo en evidencia lo que en la definición de au-tovector: {Av, v } es linealmente dependiente, y aunque v no pueda ser elvector nulo, Av sí lo puede ser. Este punto no es tan obvio, los estudiantestropiezarán aquí al principio .Es el mismo caso que el ejemplo 4.11 anterior también, donde el subespa-cio asociado a −9 fue
G = {(x, y, 2x− 2y)}
Este tema está desarrollado con más detalle en un apéndice, en la secciónE-2, donde tratamos los espacios invariantes.En definitiva, podemos presentar dos autovectores linealmente indepen-dientes en este caso
A : {(0 , (1, 0)) , (0 , (0, 1))}
pero no nos olvidemos de que cualquier combinación de autovectores aso-ciados al mismo autovalor, es también autovector asociado a ese autovalor.y
Lo cual confirma que. . .
La cantidad de autovectores linealmente independien-tes asociados a un autovalor (multiplicidad geométrica)puede ser igual o menor que su multiplicidad algebrai-ca.
JOM - Transformaciones Lineales
73

Capítulo 4. Autovalores y Autovectores 4-2. Autovalores y Autovectores
Que contesta la pregunta inicial.
Cuando se pide un cálculo de autovectores, se estila en general propor-cionar una base de autovectores. Para los casos que hemos visto; el númerode autovectores en esa base puede ser igual o menor al grado de multiplici-dad del autovalor repetido. En el caso de un autovalor no repetido –simple–:el autovector que damos como asociado es en realidad una base de todos losautovectores asociados del mismo subespacio de dimensión 1.
4-2.4. Matrices simétricas
Si la matriz es simétrica —si,j = sj,i—, de n × n, podremos encontrar lamisma cantidad de autovectores LI, no importa si los autovalores se repiten.
Proposición 4.3. Toda matriz simétrica —de entradas reales— tiene todossus autovalores también reales (condición suficiente)
. . . pero no necesaria, ya que hay matrices no simétricas con autovaloresreales (no es necesario que sea simétrica para tener autovalores reales). Vea-mos unos ejercicios para ver si podemos evitar la prueba formal.
Ejercicio 4.2. Halla los autovalores de A =
[0 1
−2 3
]y de B =
[1.5 0.5
0.5 1.5
]a- Son A y B simétricas? Son reales sus autovalores?b- A cuál matriz se aplica la proposición 4.3 anterior?
No probaremos la proposición 4.3, para un caso genérico de n, pero loharemos para n = 2
Prueba
Tomemos una matriz genérica y simétrica
S2 =
[a b
b c
]y calculemos su polinomio característico
πS2(x) = x2 − (a+ c)x+ ac− b2
la resolvente es
xi =a+ c±
√(a+ c)2 − 4(ac) + 4b2
2
lo que está dentro de la raíz cuadrada puede escribirse
a2 + c2 + 2ac− 4ac+ 4b2 = (a− c)2 + 4b2 ≥ 0
con lo cual la raíz es real cqd.
74JOM - Transformaciones Lineales

4-2. Autovalores y Autovectores Capítulo 4. Autovalores y Autovectores
El proceso de prueba establece que para la matriz
[a b
b a
]arroja autovalo-
res a± |b| y para la matriz
[a b
b a
]= a
[1 1
1 1
]arroja autovalores 0 y 2a.
Ejercicio 4.3. Prueba que la matriz antisimétrica
[a b
−b c
]sólo presenta au-
tovalores complejos.
Otras proposiciones útiles que damos sin prueba son:
Proposición 4.4. Todo par de autovalores distintos entre sí; de matriz simé-trica, están asociados a autovectores normales entre sí.
Proposición 4.5. Autovalores distintos —de una matriz de entradas realescualquiera— están asociados a autovectores linealmente independientes entresí (generalización de la proposición 4.4).
Ejercicio 4.4. Verifica la aseveración 4.5 en el ejemplo 4.6, en donde A =[1 2
2 1
]
4-2.4.1. Autovectores mutuamente normales
Según la proposición 4.5 autovalores distintos llevan a autovectores lineal-mente independientes, la pregunta ahora es ¿Podría ser que una matriz den× n —aunque tuviera autovalores repetidos— que tuviera n autovectores LI,pudiera tener todos los autovectores normales entre sí ?
La buena noticia es que sí, se puede —siempre que la matriz real(11) seasimétrica—.
Ejemplo 4.13. Halla los autovalores y autovectores normales de la matriz A = 7 −16 −8
−16 7 8
−8 8 −5
, si es posible.
pLos autovalores ya los tenemos del ejemplo 4.11.También nos quedaremos con el autovector v2 = (1, 0, 2) que satisface la−2v12 + 2v22 + 1v32 = 0,proponemos entonces un autovector v3 = (v1 , v2 , v3) tal que cumpla conla ecuación anterior −2v13 + 2v23 + 1v33 = 0 y que además sea normal a v2,
11Si la matriz es de entradas complejas y hermítica, también. A es hermítica si sus entradassimétricas son conjugados aji = aij .
JOM - Transformaciones Lineales
75

Capítulo 4. Autovalores y Autovectores 4-2. Autovalores y Autovectores
es decir que su producto escalar v2 · v3 sea nulo,
v3 = (v13 , v23 , 2v13 − 2v23)
v2 · v3 =[
1 0 2] v13
v232 (v13 − v23)
= v13 + 2 (2v13 − 2v23)
= 5v13 − 4v23
= 0
de donde si a v13 le diéramos el valor 4, a v23 le deberíamos dar 5 y v3quedaría
v3 = (4 , 5 , 2 · 4− 2 · 5)
= (4, 5,−2)
El autovalor −9 está asociado con v2 = (1, 0, 2) y con v3 = (4, 5,−2).
Para encontrar otro autovector v1 normal a estos dos, podrás hacer v1 =
v2 × v3?; en ese caso
∣∣∣∣∣∣ ı k
1 0 2
4 5 −2
∣∣∣∣∣∣ = (−10, 10, 5)
↓v1 = (−10, 10, 5) ≡ (−2, 2, 1)
lo que hay que comprobar ahora es que éste realmente sea autovectorasociado a λ = 27, y es así (no hay más que ver el ejemplo citado)Entonces, ya está, los tres autovectores conseguidos son normales entresí.y
Ejemplo 4.14. Implementa otro método para hallar lo mismo que el ejemplo4.13pAlgo más elaborado y que funciona bastante bien cuando hay pocas com-ponentes puede ser:Asumamos que v2 = (1, 0, 2) ya lo hemos adoptamos como un autovector,si hacemos v3 = (−2 , v23 , 1) ya es perpendicular al anterior, lo único quetienes que hacer es encontrar la segunda componente, que debe cumplir
76JOM - Transformaciones Lineales

4-2. Autovalores y Autovectores Capítulo 4. Autovalores y Autovectores
con −2v13 + 2v23 + 1v33 = 0, 12o sea
0 = −2 · (−2) + 2v23 + 1 (1)
= 5 + 2v23
⇓
v23 = −5
2
y
v3 =
(−2 ,−5
2, 1
)que si lo multiplicamos por −2 tenemos13
v3 = (4 , 5 ,−2)
escencialmente el mismo resultado que el anterior, como puedes ver.Podemos verificarlo 7 −16 −8
−16 7 8
−8 8 −5
1 4
0 5
2 −2
=
−9 −36
0 −45
−18 18
= −9
1 4
0 5
2 −2
y
4-2.5. Resultados a tener en cuenta
Un par autovalor(λ)-autovector(v) para una matriz A esaquel en que el conjunto {Av, v } es linealmente depen-diente, y satisface la relación A · v = λ · v.v 6= θ, pero Av puede ser el vector nulo.
En esta última definición ya no importa que las entradas de A sean reales ono, como tampoco el escalar λ.
1. los autovalores de una matriz de entradas reales:
a) Pueden ser valores reales o complejos
b ) pueden haber dos o más con el mismo valor —multiplicidad—
12No te olvides de la condición para los autovectores asociados al autovalor de multiplicidad2 λ = −9.
13Esto puede hacerse sin problemas porque los autovectores definen una dirección, e infini-tos autovectores pueden estar definiendo una única dirección. Por otro lado sería interesanteencontrar autoversores, y de hecho lo haremos en alguna oportunidad.
JOM - Transformaciones Lineales
77

Capítulo 4. Autovalores y Autovectores 4-3. Matrices similares
c) pueden tener el valor cero —múltiples o no—
2. Los autovectores de una matriz de entradas reales:
a) Nunca serán el vector nulo. (por definición)
b ) Asociados a autovalores distintos, son LI
c) Asociados a un autovalor de multiplicidad m, puede ser un subespa-cio de dimensión ≤ m. Del cual pude extraerse una base, represen-tativa de todos los autovectores asociados con ese autovalor.
3. Para matrices simétricas, además...
a) Los autovalores son reales
b ) Pueden darse tantos autovectores LI como dimensión tiene la matriz
c) Siempre puede obtenerse un conjunto de todos los autovectores nor-males entre sí
Definición 1 (Espectro). De una matriz es el conjunto de autovalores de lamisma.
Definición 2 (Autoespacio). Espacio vectorial asociado a un autovalor, me-diante la relación Av = λv donde no se excluye al vector nulo.
Ejemplo: para la matriz A =
−1 −6 −2
1 4 1
0 0 1
– el espectro es σ(A) = { 1, 2 }– Eλ=2 =
{(x,−1
2x, 0)
}y Eλ=1 = { (x, y,−x+ 3y) }
son los auto-espacios asociados a los respectivos autovalo-res.
4-3. Matrices similares
Dos matrices cuadradas A y B son similares si existe una matriz C inverti-ble, tal que
B = C−1 A C (4.7)
NotaremosB ∼ A
el signo ∼ significa «similaridad» y no que las entradas de A sean aproxima-damente iguales a las entradas de B.
Claramente, puedes escribir también
B = D A D−1
con tal de hacer en este caso D = C−1. Veamos un ejemplo
78JOM - Transformaciones Lineales

4-3. Matrices similares Capítulo 4. Autovalores y Autovectores
Ejemplo 4.15. Encuentra una matriz similar a
[0 1
−2 3
].
pNada más debemos aplicar la 4.7 proponiendo una matriz C no singular,de dimensiones apropiadas, por ejemplo
C =
[1 2
2 1
]de modo que
B =
[1 2
2 1
]−1 [0 1
−2 3
] [1 2
2 1
]
=
[2 −1
0 1
]Que es una de las infinitas posibles.y
4-3.1. Propiedad de las matrices similares
Proposición 4.6. Las matrices similares comparten los valores característi-cos.
Ejemplo 4.16. Verifica el teorema a partir del ejemplo anterior(4.15)p
Sólo tenemos que calcular los autovalores de
[0 1
−2 3
]y de
[2 −1
0 1
]y
verificar que sean iguales
πA (λ) =
∣∣∣∣[ λ −1
2 λ− 3
]∣∣∣∣= λ2 − 3λ+ 2
= (λ− 2) (λ− 1)
πB (λ) =
∣∣∣∣[ λ− 2 1
0 λ− 1
]∣∣∣∣ = (λ− 2) (λ− 1)
con lo que hemos verificado el teorema, diciendo que efectivamente B yA comparten los mismos autovalores.y
Ahora lo probaremos.
JOM - Transformaciones Lineales
79
Capítulo 4. Autovalores y Autovectores 4-3. Matrices similares
Prueba
Tomemos dos matrices similares A y B, por tanto podemos escribir B =
C−1 A C, calculemos el polinomio característico de B
πB (λ) = |[λI −B]| (4.8)
=∣∣[λI − C−1 A C
]∣∣=
∣∣[λC−1 I C − C−1 A C]∣∣
podemos extraer factor común a la derecha . . .
πB (λ) =∣∣[λC−1 I − C−1 A ] C∣∣
y también a la izquierda . . .
πB (λ) =∣∣C−1 [λ I − A ] C
∣∣ (4.9)
que por propiedad de los determinantes
πB (λ) =∣∣C−1∣∣ |[λ I − A ]| |C|
y también por propiedad de los determinantes, los de |C−1| y |C| sonrecíprocos, por lo que finalmente
πB (λ) = |[λ I − A ]|= πA (λ) (4.10)
Como los polinomios característicos de dos matrices similares son igua-les, como predice la (4.10), entonces las matrices similares compartiránautovalores. Y con esto queda demostrado el teorema.
Proposición 4.7. Las matrices similares tienen autovectores ligados por lamatriz C de la definición 4.7
Prueba
Tomemos dos matrices similares A y B, donde A : (λ, v) es un parautovalor-autovector; por tanto podemos escribir B = C−1 A C y deahí que
A = CBC−1
pos-multiplicando por v asociado a λ, tenemos
Av = CBC−1v = λv
Efectuemos ahora la sustitución
w = C−1v ⇔ v = Cw
80JOM - Transformaciones Lineales

4-3. Matrices similares Capítulo 4. Autovalores y Autovectores
en la ecuación anterior. Tenemos que
Av = CBw = λv = λCw
que por ser λ un escalar puede escribirse
CBw = Cλw
y como C−1 existe,Bw = λw = λC−1v
finalmente nos dice que efectivamente, el autovector asociado al autova-lor λ de A y B, para la matriz B = C−1 A C no es v, sino C−1ven otras palabras
A : { (λ0, v0) } ⇔ C−1 A C = B :{ (λ0, C
−1v0) }
(4.11)
y ya está.
Proposición 4.8. El polinomio caraterístico, el espectro, la traza —suma delos elementos de la diagonal—, y el determinante permanecen invariantes en-tre dos matrices similares. Es decir: B = A−1CA, entonces πB(λ) = πC(λ),σ(B) = σ(C),
∑bi,i =
∑ci,i, det(B) = det(C).
Consecuencia 4.8.1. Como corolario de la proposición anterior, si A tieneautovalores λi.– A es invertible si 0 /∈ σ(A)
– Tra(A) =∑λi (también las repetidas)
JOM - Transformaciones Lineales
81

Capítulo 4. Autovalores y Autovectores 4-3. Matrices similares
82JOM - Transformaciones Lineales
Capítulo 5
Diagonalización de matrices yAplicación al cambio de bases
Resumen:
En esta unidad vamos encontrar una matriz si-
milar diagonal, mediante el cálculo de los autova-
lores y autovectores de la matriz. Las condiciones
de existencia y el cálculo son el tema de la primera
parte.
Las matrices diagonales similares a una matriz
original son útiles en diversos campos de la inge-
niería, como ser: desacoplamientos de sistemas di-
námicos lineales y cambios de coordenadas en ge-
neral.
Luego hemos de trabajar con matrices asocia-das a transformaciones lineales, donde ocurrencambios de base. En ese momento descubriremosque las matrices asociadas —que hasta ahora eranúnicas— dependen de las bases elegidas —que has-ta ahora eran solamente las bases canónicas—.Es interesante cuando los dos espacios coinciden.-
83

Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases 5-1. Diagonalización de Matrices
5-1.Diagonalización de Matrices . . . . . . . . . . . . . . . . . . . . . . 84
5-1.1. No unicidad de la matriz diagonal similar . . . . . . . . . 86
5-1.2. Existencia de diagonal similar . . . . . . . . . . . . . . . . 86
5-1.3. Cuándo es diagonalizable una matriz? . . . . . . . . . . . 87
5-1.4. Para tener en cuenta . . . . . . . . . . . . . . . . . . . . . 89
5-2.Matrices simétricas . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5-2.1. Autovectores de una matriz simétrica . . . . . . . . . . . . 90
5-2.2. Prueba de ortogonalidad . . . . . . . . . . . . . . . . . . . 90
5-3.Cambios de base en TL . . . . . . . . . . . . . . . . . . . . . . . . . 92
5-3.1. Diagonalización: Forma desacoplada . . . . . . . . . . . . 97
5-1. Diagonalización de Matrices
Olvidémonos por un momento de la relación entre una matriz asociada auna transformación lineal y centrémonos en las matrices cuadradas en sí.
La idea es encontrar, si existiera, una matriz similar diagonal. En ese casolos autovalores de la matriz estarían todas en la diagonal —de acuerdo con losostenido en la proposición 4.6—.Supongamos —para hacerlo más sencillo— una matriz cuadrada A ∈ R2×2 conautovalores {λ1, λ2 } asociados a los autovectores { v1, v2 } respectivamente.Pudiéramos escribir DA = C−1AC donde DA tiene la forma
DA =
[λ1 0
0 λ2
]
Por las relaciones Av1 = λ1v1 y Av2 = λ2v2 donde
A =
[a11 a12
a21 a22
], v1 =
[v11
v21
], v2 =
[v12
v22
]es decir
[a11 a12
a21 a22
] [v11
v21
]=
[λ1v11
λ1v21
],
[a11 a12
a21 a22
] [v12
v22
]=
[λ2v12
λ2v22
]o en masa
[a11 a12
a21 a22
]︸ ︷︷ ︸
A
[v11 v12
v21 v22
]︸ ︷︷ ︸
V
=
[λ1v11 λ2v12
λ1v21 λ2v22
]
84JOM - Transformaciones Lineales

5-1. Diagonalización de Matrices Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases
Puedes escribir la matriz de la derecha(1) como[λ1v11 λ2v12
λ1v21 λ2v22
]=
[v11 v12
v21 v22
]︸ ︷︷ ︸
V
[λ1 0
0 λ2
]︸ ︷︷ ︸
DA
En definitiva V DA = AV de donde
DA = V −1AV (5.1)
La cual existe siempre que exista la inversa de V . Y la inversa de V existirásiempre y cuando hayan tantos autovectores linealmente independientes co-mo para formar una matriz de n × n. V la llamaremos en ese caso «matrizdiagonalizante» .
Definición 2. La matriz C que hace que la matriz similar DA = C−1 A C seadiagonal, se llama matriz diagonalizante. El proceso para pasar de A a DA
se llama diagonalización de la matriz A
Ejemplo 5.1. Diagonaliza A =
[1 2
2 1
]si es posible.
pEsta es la misma matriz que hemos trabajado en muchas ocasiones, comoen los ejemplos 4.4 y 4.6, de donde
πA (λ) = (λ+ 1) (λ− 3)⇒ λ1 = 3, λ2 = −1
y v1 =
[1
1
], v2 =
[−1
1
]Armemos con ellos la matriz de los autovectores V =
[[v1] [v2]
]V =
[1 −1
1 1
]⇒ V −1 =
1
2
[1 1
−1 1
]la matriz diagonal Λ = V −1 A V será...
Λ =1
2
[1 1
−1 1
] [1 2
2 1
] [1 −1
1 1
]=
1
2
[1 1
−1 1
] [3 1
3 −1
]=
[3 0
0 −1
]hemos llamado Λ = DA a la matriz diagonal similar a Ay
1Recuerda que en el producto de matrices EC el resultado es la combinación lineal de lascolumnas de E con los escalares en las columnas de C.
JOM - Transformaciones Lineales
85

Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases 5-1. Diagonalización de Matrices
diagonalizar es encontrar una matriz similar diagonal.La matriz diagonalizante está formada por autovecto-res.
5-1.1. No unicidad de la matriz diagonal similar
Proposición 5.1. Una matriz no tiene en general una sola matriz diagonalsimilar.
Ejercicio 5.1. Para el ejemplo 5.1. Arma ahora la matriz V1 =[
[v2] [v1]]
y encuentra la nueva matriz diagonal. ¿Es la misma? ¿Puedesencontrar la relación que vincula el orden de la diagonal prin-cipal y el orden de los autovectores?
Ejercicio 5.2. Para el ejemplo 5.1. Arma ahora la matriz V2 =[[k v1] [h v2]
]donde k, h ∈ R0
¿Qué puedes afirmar respecto de la pregunta anterior?
Proposición 5.2. La matriz diagonal DA similar a una dada matriz A, tiene ensu diagonal los autovalores de A ordenados de tal manera que se correspondacon sus autovectores asociados
La matriz diagonal2 no es única, menos aún la matrizdiagonalizante será única.
5-1.2. Existencia de diagonal similar
La pregunta es ahora¿Todas las matrices cuadradas son diagonalizables ?
La respuesta la trataremos de sacar con un contraejemplo
2Excepto cuando tiene un sólo autovalor y está asociado a n autovectores, claro está
86JOM - Transformaciones Lineales

5-1. Diagonalización de Matrices Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases
Ejemplo 5.2. Diagonaliza la matriz A =
[1 1
0 1
], de ser posible.
p
Evidentemente
∣∣∣∣[ λ− 1 −1
0 λ− 1
]∣∣∣∣ = (λ− 1)2
y λ1 = λ2 = 1
por lo que los autovectores saldrán de[0 −1
0 0
] [v11v21
]=
[0
0
]de donde v21 =cualquier número y v11 = 0, por lo que
v1 =
[1
0
]De modo que cuando se quiera encontrar v2, éste sería colineal con v1, yno podríamos armar la matriz C ya que al ser C un conjunto LD, no existela inversa de C.Por tanto esta matriz no es diagonalizable.y
Y la respuesta a la luz del ejemplo 5.2 es que no todas, porque se ha en-contrado una que no es diagonalizable. Entonces la siguiente pregunta es...
5-1.3. Cuándo es diagonalizable una matriz?
Como el caso anterior se dió que la matriz no pudo diagonalizarse por tenerautovalores repetidos, la pregunta es ahora
¿Si hay autovalores repetidos NO existirá similar diagonal?La respuesta la trataremos de sacar con otro contraejemplo
Ejemplo 5.3. Diagonaliza la matriz A =
59 2 5
2 56 −10
5 −10 35
de ser posible
pEl polinomio característico. . .
πA(λ) = λ3 − 150λ2 + 7200λ− 108000 = (λ− 30) (λ− 60)2
. . . tiene un autovalor con multiplicidad 2, por tanto nos interesará hallardos autovectores asociados a λ = 60 1 −2 −5
−2 4 10
−5 10 25
x
y
z
=
0
0
0
⇒ 2t1 + 5t2
t1t2
JOM - Transformaciones Lineales
87

Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases 5-1. Diagonalización de Matrices
de donde podremos exhibir dos autovectores linealmente independientes,de la misma manera que producíamos una base para un subespacio
v1 =
2
1
0
, v2 =
5
0
1
Puedes constatar que el autovector asociado a λ = 30 es
v3 =
−1
2
5
con lo cual podemos formar V , y puedes comprobar que
1
30
2 26 −10
5 −10 5
−1 2 5
59 2 5
2 56 −10
5 −10 35
2 5 −1
1 0 2
0 1 5
=
60 0 0
0 60 0
0 0 30
Con lo que hemos mostrado que a pesar de la multiplicidad, A tiene matrizsimilar diagonal.ypEn el proceso de encontrar autovectores para λ = 60 pudimos hacer másaún: exhibir autovectores normales:
tomamos v1 =
2
1
0
y v2 =
2t1 + 5t2t1t2
y por producto escalar
v1 · v2 = 5t1 + 10t2 = 0 (5.2)
por lo que si t2 asumiera el valor 1, t1 deberá asumir el valor −2, y quedan
v1 =
2
1
0
, v2 =
1
−2
1
(5.3)
La matriz V ahora tiene una mejor condición para invertirse.y
Claramente la respuesta es que autovalores repetidos no garantizan lainexistencia de la matriz diagonal similar.Podemos decir que la matriz de dimensiones n×n será diagonalizable cuandola matriz de los autovectores pueda invertirse, y eso se dará únicamente cuan-do la matriz tenga los n autovectores linealmente independientes. En otraspalabras:
Los autovectores de una matriz diagonalizable formanuna base para los espacios que relaciona la transfor-mación lineal a la que esta matriz está asociada.
88JOM - Transformaciones Lineales

5-2. Matrices simétricas Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases
Ejercicio 5.3. Diagonaliza, si es posible A =
8 9 9
3 2 3
−9 −9 −10
.
Proposición 5.3. Las matrices reales de n × n diagonalizables son las quetienen su conjunto de n autovectores Linealmente independiente
5-1.4. Para tener en cuenta
1. Dada una matriz An×n, existen infinitas matrices similares a ella, y ha-brán a lo sumo n! matrices diagonales similares o ninguna.
2. Para que una matriz An×n sea diagonalizable, sus n autovectores debenser LI
5-2. Matrices simétricas
Recordemos que una matriz simétrica es aquella que es igual a su tras-puesta
S = S> (5.4)
Para nuestra fortuna el resto del libro aprovecharemos las ventajas de tra-bajar con matrices simétricas y ellas son diagonalizables, ya que como hemosdicho, tienen todos sus autovectores reales y linealmente independientes porlo que
Proposición 5.4. Toda matriz simétrica es diagonalizable
Proposición 5.5. Para toda matriz simétrica, los autovectores asociados aautovalores distintos son ortogonales.
Esta proposición no la hemos probado, pero lo haremos para un caso gené-rico particular en 5-2.2(pág.90).
Proposición 5.6. Toda S simétrica de entradas reales tiene matriz diagonali-zante ortogonal Q
Las columnas de una matriz ortogonal son versores colectivamente ortogo-nales y tiene la propiedad de que Q−1 = Q>, con lo que
Q−1 A Q = Q> A Q = DA (5.5)
Observación: Todos estos conceptos los aplicaremos en unidades posterio-res, ya sea considerados en las transformaciones, actuando sobre la matrizasociada a la transformación [L ] mediante cambios de base; como actuandosobre una matriz que representa una cónica o cuádrica de posición general,para canonizarla.
JOM - Transformaciones Lineales
89

Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases 5-2. Matrices simétricas
Consecuentemente, insiste en ellos hasta tenerlos en claro. Es recomenda-ble que trabajes ahora con los ejercicios propuestos
Para continuar, trabajaremos con una matriz simétrica para el caso 2x2genérica, de modo que las proposiciones que probemos, conclusiones que ex-traigamos, etcétera, se aplicarán a esta dimensión. . . pero puedes estar seguroque son extensibles a cualquiera otra matriz simétrica de diferente dimensión.
5-2.1. Autovectores de una matriz simétrica
Tomemos la matriz S2 =
[a b
b c
], su polinomio característico es. . .
πS2(x) =
∣∣∣∣[ x− a −b−b x− c
]∣∣∣∣= x2 − (c+ a)x+ ac− b2 = (x− a)(x− c)− b2 = 0
donde si aplicáramos la resolvente tendríamos
x1 =1
2(c+ a) +
1
2
√(c− a)2 + 4b2
x2 =1
2(c+ a)− 1
2
√(c− a)2 + 4b2
para el cálculo de los autovectores resolvemos[xi − a −b−b xi − c
] [v1iv2i
]=
[0
0
]es decir[
xi − a −b 0
−b xi − c 0
]R2=(xi−a)R2+bR1−−−−−−−−−−−→
[xi − a −b 0
0 0 0
]de donde (xi − a)v1i − bv2i = 0
porque (xi − a)(xi − c)− b2 = πS2(xi) = 0
si v1i = b, debe ser
vi =
[b
xi − a
]autovector de S2 (5.6)
son los autovectores de una matriz simétrica.
Para el caso particular a = c los autovalores serían
x1 = a+ b x2 = a− b
y si calcularas los autovectores asociados, llegarías a
S2 :
{(a+ b,
[1
1
]),
(a− b,
[−1
1
])}(5.7)
5-2.2. Prueba de ortogonalidad
Usaremos lo que hemos visto en la sección anterior. . .
90JOM - Transformaciones Lineales

5-2. Matrices simétricas Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases
Prueba
Para S2 =
[a b
b c
]el polinomio característico es πS2(λ) = λ2 − (c+ a)λ+ a c− b2,sus autovalores son
λ1 =1
2
(c+ a+
√(a− b)2 + 4b2
)y λ2 =
1
2
(c+ a−
√(a− b)2 + 4b2
),
por tanto sus autovectores son v1 = (b, λ1 − a) y v2 = (b, λ2 − a)
el producto y la suma de los autovalores son:
λ1λ2 =1
4
(c+ a+
√(c− a)2 + 4b2
)(c+ a−
√(c− a)2 + 4b2
)=
1
4
((c+ a)2 − (c− a)2 − 4b2
)=(a c− b2
)y
λ1 + λ2 = (c+ a)
El producto escalar de los autovectores. . .
v1 · v2 = (b, λ1 − a)(b, λ2 − a) = b2 + (λ1 − a)(λ2 − a)
= b2 + λ1λ2 − aλ1 − aλ2 + a2
= b2 + λ1λ2 − a(λ1 + λ2) + a2
reemplazando λ1λ2 y λ1 + λ2, que convenientemente hemos calculadoarriba. . .
v1 · v2 = b2 + a c− b2 − a(c+ a) + a2 = 0
. . . efectivamente el producto es cero, por lo que los autovectores de lamatriz simétrica de 2 × 2 son normales entre sí, y ya está para el casoa 6= c.Naturalmente, para el caso a = c, está también probado, y ya ves que(1, 1) y (−1, 1) son normales entre sí.
Esta prueba hace que las proposiciones 5.4 y 5.6 se comprueben automáti-camente, ya que por un lado hemos conseguido dos autovectores linealmenteindependientes (normales); y por otro estamos en condiciones de armar lamatriz diagonalizante simplemente escalando los autovectores normales ante-riores de manera que sean versores.
Puedes pasarte el repaso que tenemos antes de abordar la próxima sección:
Repaso de cambio de base
Recordemos la notación para cambios de base que hemos implementado:Sea V un espacio vectorial de dimensión finita n, y v un elemento de ese espacio;luego [ v ] es la matriz de coordenadas de ese vector v sobre una base canónicade V .
Si el conjunto B1 ={b11 , b
12 , · · · , b1n
}⊂ V fuera linealmente independiente y ge-
JOM - Transformaciones Lineales
91

Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases 5-3. Cambios de base en TL
nerador de V , entonces sería una base de V , y supongamos que es distinta a lacanónica.
Para hallar las coordenadas de v sobre la base B1, tenemos la relación
[ v ] = [B1 ] [ v ]1 (5.8)
donde [B1 ] representa la matriz de transición de la base B1 a la canónica y estáformado por los vectores de la base B1 sobre base canónica, es decir
[B1 ] =[ [
b11] [
b12]· · ·
[b1n] ]
(5.9)
Un ejemplo lo aclara todo
Ejemplo Sea el espacio V = R2, el vector v = (1, 2), y la baseB1 =
{(3, 1) , (−2, 4)
}, escribe las coordenadas de v sobre base canónica y sobre
base B1.
pPrimero verifiquemos que B1 sea base de R2
[B1 ] =
∣∣∣∣[ 3 −2
1 4
]∣∣∣∣ = 14 6= 0
y lo es, porque son dos vectores de R2 y el determinante de la matriz de transiciónno es cero, luego v sobre base canónica es simplemente
[ v ] =
[1
2
]de modo que el vector v sobre base B1 es:
[ v ]1 = [B1 ]−1
[ v ]
=
[3 −2
1 4
]−1 [1
2
]=
1
14
[8
5
]1
comprobémoslo. . .
8
14(3, 1) +
5
14(−2, 4) = (1, 2) = v
Como era de esperarse.y
5-3. Cambios de base en TL
Sea una transformación lineal L entre dos espacios V y V ′.
La matriz asociada a la transformación lineal será [L ] y se cumplirá que. . .
[ v′ ] = [L ] [ v ] (5.10)
donde que v′ ∈ V ′ y v ∈ V .
La (5.10) liga el mapeo del vector v en base canónica —B1— al vector v′ en laotra base canónica —B2—.
92JOM - Transformaciones Lineales
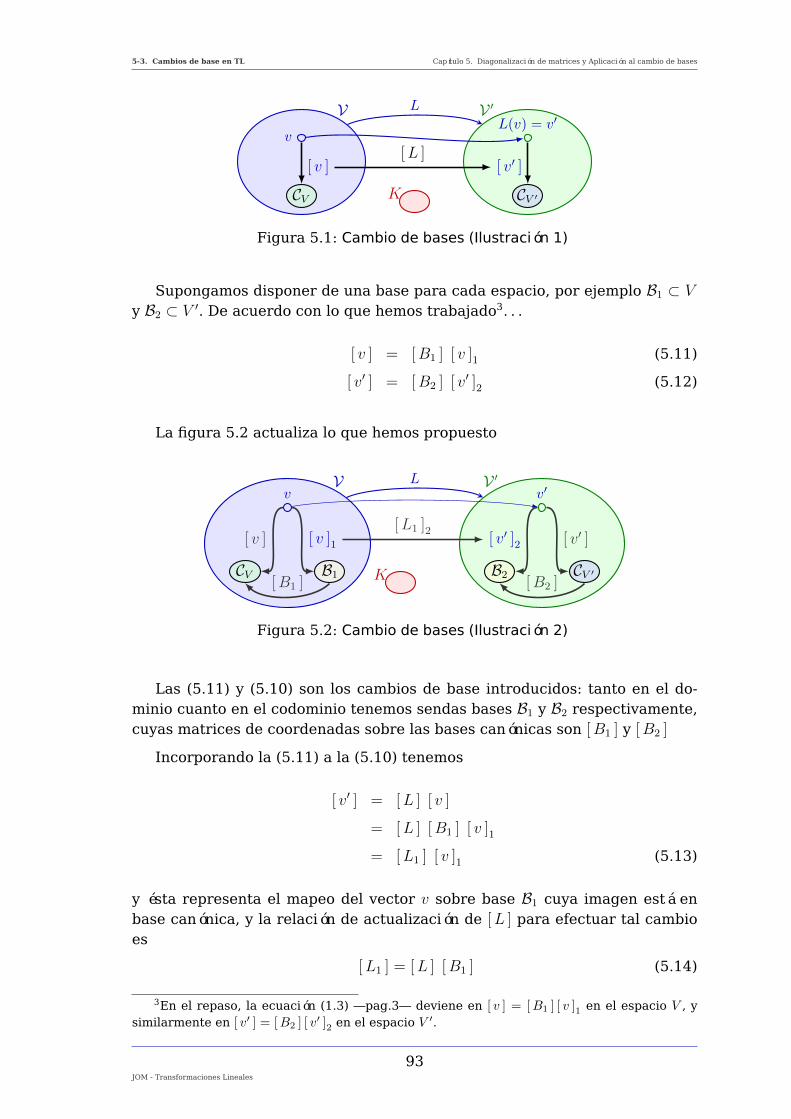
5-3. Cambios de base en TL Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases
V V ′
KCV CV ′
vL(v) = v′
L
[ v ] [ v′ ][L ]
Figura 5.1: Cambio de bases (Ilustración 1)
Supongamos disponer de una base para cada espacio, por ejemplo B1 ⊂ V
y B2 ⊂ V ′. De acuerdo con lo que hemos trabajado3. . .
[ v ] = [B1 ] [ v ]1 (5.11)
[ v′ ] = [B2 ] [ v′ ]2 (5.12)
La figura 5.2 actualiza lo que hemos propuesto
v v′V V ′
KCV CV ′B1 B2
L
[ v ]1[ v ]
[B1 ]
[ v′ ]2 [ v′ ]
[B2 ]
[L1 ]2
Figura 5.2: Cambio de bases (Ilustración 2)
Las (5.11) y (5.10) son los cambios de base introducidos: tanto en el do-minio cuanto en el codominio tenemos sendas bases B1 y B2 respectivamente,cuyas matrices de coordenadas sobre las bases canónicas son [B1 ] y [B2 ]
Incorporando la (5.11) a la (5.10) tenemos
[ v′ ] = [L ] [ v ]
= [L ] [B1 ] [ v ]1
= [L1 ] [ v ]1 (5.13)
y ésta representa el mapeo del vector v sobre base B1 cuya imagen está enbase canónica, y la relación de actualización de [L ] para efectuar tal cambioes
[L1 ] = [L ] [B1 ] (5.14)
3En el repaso, la ecuación (1.3) —pag.3— deviene en [ v ] = [B1 ] [ v ]1 en el espacio V , ysimilarmente en [ v′ ] = [B2 ] [ v′ ]2 en el espacio V ′.
JOM - Transformaciones Lineales
93

Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases 5-3. Cambios de base en TL
Por otro lado, incorporando la (5.12) a la (5.10) tenemos
[L ] [ v ] = [ v′ ]
= [B2 ] [ v′ ]2⇓
[ v′ ]2 = [B2 ]−1 [L ] [v]
= [L ]2 [ v ] (5.15)
y ésta representa el mapeo del vector v sobre base canónica de V , cuya imagenestá escrita como coordenadas en base B2 de V ′; y la relación de actualizaciónde [L ] para efectuar tal cambio es
[L ]2 = [B2 ]−1 [L ] (5.16)
Por último, incorporando la (5.12) y la (5.11) al mismo tiempo a la (5.10)tenemos
[ v′ ] = [L ] [ v ]
m[B2 ] [ v′ ]2 = [L ] [B1 ] [ v ]1
m[ v′ ]2 = [B2 ]−1 [L ] [B1 ] [ v ]1
= [L1 ]2 [ v ]1 (5.17)
y ésta representa el mapeo del vector v sobre la base B1 cuya imagen está enbase B2, y la relación de actualización de [L ] para efectuar tal cambio es
[L1 ]2 = [B2 ]−1 [L ] [B1 ] (5.18)
La figura 5.3 es un pictograma que brinda toda la escena que hemos traba-jado y actualiza lo que hemos propuesto. Luego de los ejemplos hacemos unadescripción de la misma.
Nota 2. Importante: Conviene recordar que la transformación lineal L es lamisma. No ha cambiado. Lo único que ha pasado es que ahora tenemos másposibilidades de expresarla matricialmente.
Ejemplo 5.4. Para la Transformación Lineal L, halla la matriz asociada respecto
a) de ambas bases canónicas b) de B1 y canónica
Donde L : R2 → P2 | L((v1 , v2)
)= v2 + v1 x+ (v1 − v2)x2
y la base B1 ⊂ R2 = { (2, 3), (1, 3) }.pConsiderando que la base canónica de P2 es CP2 =
{1 , x , x2
}, tenemos
que la matriz asociada será a)
[L ] =
0 1
1 0
1 −1
94
JOM - Transformaciones Lineales
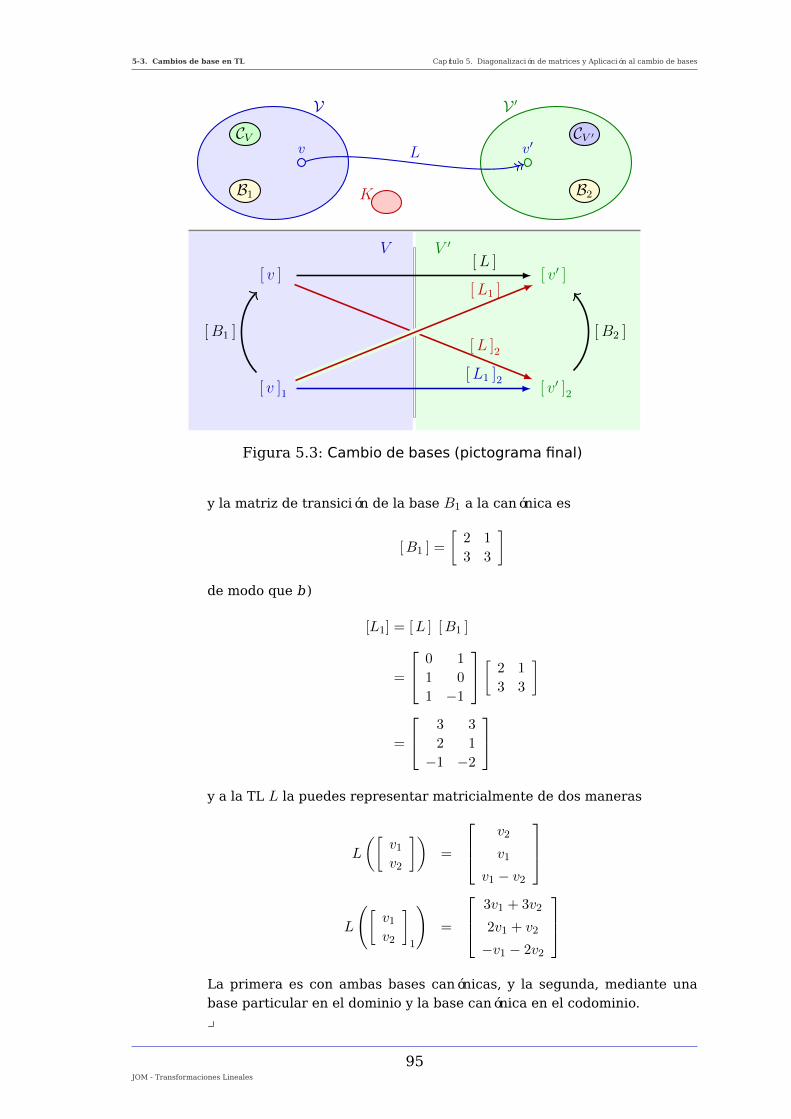
5-3. Cambios de base en TL Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases
v v′L
V V ′
K
CV CV ′
B1 B2
V V ′
[ v ]
[ v ]1
[ v′ ]
[ v′ ]2
[B1 ] [B2 ]
[L ]
[L1 ]2
[L ]2
[L1 ]
Figura 5.3: Cambio de bases (pictograma final)
y la matriz de transición de la base B1 a la canónica es
[B1 ] =
[2 1
3 3
]de modo que b )
[L1] = [L ] [B1 ]
=
0 1
1 0
1 −1
[ 2 1
3 3
]
=
3 3
2 1
−1 −2
y a la TL L la puedes representar matricialmente de dos maneras
L
([v1v2
])=
v2
v1
v1 − v2
L
([v1v2
]1
)=
3v1 + 3v2
2v1 + v2
−v1 − 2v2
La primera es con ambas bases canónicas, y la segunda, mediante unabase particular en el dominio y la base canónica en el codominio.y
JOM - Transformaciones Lineales
95

Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases 5-3. Cambios de base en TL
Ejemplo 5.5. Para el ejemplo 5.4 considera que la base B2 ⊂ P2 esB2 =
{x2 , 1 + x2 , 1 + x+ x2
}Halla la matriz asociada a la transformación que mapea vectores (escritossobre base canónica) en polinomios (escritos sobre base B2) .pTenemos la matriz de transición
[B2 ] =
0 1 1
0 0 1
1 1 1
y lo que queremos averiguar es [L]2
[L]2 = [B2 ]−1 [L ]
=
−1 0 1
1 −1 0
0 1 0
· 0 1
1 0
1 −1
=
1 −2
−1 1
1 0
y la misma transformación de siempre, también puede escribirse
L
([v1v2
])=
v1 − 2v2−v1 + v2
v1
2
(5.19)
y
Ejemplo 5.6. Referido a los ejemplos anteriores, halla la matriz asociada quemapea vectores de R2 (escritos sobre base B1) en polinomios de P2 (escri-tos sobre base B2).pEs casi inmediato que
[L1 ]2 = [B2 ]−1 [L ] [B1]
=
−1 0 1
1 −1 0
0 1 0
0 1
1 0
1 −1
[ 2 1
3 3
]
=
−4 −5
1 2
2 1
2
96JOM - Transformaciones Lineales

5-3. Cambios de base en TL Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases
Lo cual da a entender que la TL originalL : R2 → P2 | L
((v1, v2)
)= v2 + v1 x+ (v1 − v2)x2 puede escribirse como
L
([v1v2
]1
)=
−4v1 − 5v2v1 + 2v22v1 + v2
2
(5.20)
L (v) = v′, cuando v está en la base B1 ⊂ R2 y v′ está escrito en la baseB2 ⊂ P2.
y
Las situaciones de los tres últimos ejemplos pueden reflejarse en la figura5.3 y, pueden asociarse a su vez a composiciones de TL. Ten en cuenta que a laizquierda aparece UN vector v de V nada más que escrito sobre base canónica—[ v ]— o escrito sobre base B1 —[ v ]1— y otro tanto sucede a la derecha en elcodominio: aparece UN vector v′ de V ′ tal que L (v) = v′, nada más que escritosobre base canónica —[ v′ ]— o escrito sobre base B2 —[ v′ ]2—, las flechas conpuntas abiertas representan las matrices de transición, y las otras representanmatrices asociadas.
Una TL puede escribirse matricialmente de infinitasmaneras, la matriz asociada dependerá de las basesque se tomen en el dominio y en el codominio.
Ejercicio 5.4. Dada una TL L : R2 → R2 | L((v1, v2)
)= (3v1 + v2 , v1 − 2v2),
la base B1 = {(1, 1) , (−1, 1) }, y el vector u = (2,−2),a) Analiza los cuatro casos planteados y represéntalo como enla figura 5.3.b) Representa el vector u y su transformado de las diferentesformas posibles.
5-3.1. Diagonalización: Forma desacoplada
Pensemos ahora en la posibilidad de que V ′ = V y que estemos usandoun sólo cambio de base, por tanto B2 = B1, de este modo la (5.18) se ha detransformar en
[L1 ]2 = [B1 ]−1 [L ] [B1 ] (5.21)
La pregunta obligada es:
¿qué hubiese sucedido si en lugar de una base cualquiera B1, usáramos unabase que tuviera los autovectores de [L ]?, o mejor
¿los autoversores normales de [L ]?
JOM - Transformaciones Lineales
97

Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases 5-3. Cambios de base en TL
Sencillamente [L1 ]2 hubiese sido diagonal
[L1 ]2 = DL = Q−1 [L ] Q (5.22)
y lo que hemos logrado es ver a la transformación lineal cuya matriz asociada[L ] en forma desacoplada4. ¿Qué significa esto? Un ejemplo lo aclara mejor.
Ejemplo 5.7. Desacopla la TL L : R2 → R2 | L((x, y)
)= (x+ y, x− y).
pPuedes probar que se trata de una TL y que su matriz asociada es
[L ] =
[1 1
1 −1
]y sus autovalores y autovectores(
λ1 =√
2, v1 =
[1 +√
2
1
]) (λ2 = −
√2, v2 =
[1−√
2
1
])por tanto sus autoversores ortogonales
q1 =1√(
4 + 2√
2) [ 1 +
√2
1
]
q2 =1√(
4− 2√
2) [ 1−
√2
1
]
de manera que la matriz Q es
Q =
1+√2√
4+2√2
1−√2√
4−2√2
1√4+2√2
1√4−2√2
y la nueva matriz asociada a la misma transformación lineal L es
[LQ]Q =
[ √2 0
0 −√
2
]Q
de modo que bajo la nueva base
Q =
1√(4 + 2
√2) (1 +
√2 , 1
),
1√(4− 2
√2) (1−
√2 , 1
)≈{
(0. 92388 , 0. 38268) , (−0. 38268 , 0. 92388)
}4Nota que en este caso particular no escribimos [Q]: Sucede que ésta no es una matriz
asociada a una transformación lineal como [L], tampoco es la colección de vectores de unabase expresada en términos de otra como [B1 ] : es simplemente Q porque es una matriz deautoversores normales de [L ] .
98JOM - Transformaciones Lineales

5-3. Cambios de base en TL Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases
la transformación L se define matricialmente como
[v′]Q
=
[ √2 0
0 −√
2
][ v ]Q (5.23)
o lo que es lo mismo
L
([v1v2
]Q
)=
[ √2v1
−√
2v2
]Q
(5.24)
nota la diferencia con la forma original
L
([v1v2
])=
[v1 + v2v1 − v2
](5.25)
Esta forma desacoplada —mediante el uso de la base de autoversores nor-males Q— claramente es más simple que la original —donde hemos usadola base canónica CR2 = {(1 , 0) , (0 , 1)}—.y
Tratemos de mejorar la explicación de alguna manera más sencilla:
Supongamos que A : V → V es tal que su matriz asociada
[A] =
[1 2
2 1
]. Como hemos visto —en los ejemplos 4.4 y 4.6—
, esta matriz tiene los pares autovalor-autovector{ (3 , (1, 1)
),(− 1 , (−1, 1)
) }de modo que si tomamos como nueva base a B1 =
{ (1, 1), (−1, 1) }, será
[B1 ]−1 [A] [B1 ] =
[3 0
0 −1
]1
= [DA]
de modo que si antes habíamo hecho[1 2
2 1
] [v1v2
]=
[v1 + 2v22v1 + v2
]para calcular la imagen de v en la base canónica
L (v) = v′
[A] [ v ] = [ v′ ]
JOM - Transformaciones Lineales
99
Capítulo 5. Diagonalización de matrices y Aplicación al cambio de bases 5-3. Cambios de base en TL
ahora haremos
L (v) = v′
[DA] [ v ]1 = [ v′ ]1
y esto es [3 0
0 −1
] [x1x2
]=
[3x1−x2
]1
Comparando
[v1 + 2v22v1 + v2
]y
[3x1−x2
]1
vemos que en el se-
gundo caso,
la primera componente del vector transformado depende só-lo de la primera componente del vector original, mientras queen el primer caso
la primera componente del vector transformado depende dela primera Y de la segunda componente del vector original.Este es el valor de un cambio de base: hacer que las cosas sevean más simples; sin cambiarlas.
Con todo, no podemos garantizar que exista la representación desacoplada,ya que la matriz asociada a una transformación lineal que transforma elemen-tos de un espacio de dimensión n en elementos de otro espacio de la mismadimensión, podría tener menos que n autovectores linealmente independien-tes.
Ejercicio 5.5. Para la transformación del ejercicio 5.4, trata de encontraruna base B1 tal que la transformación pueda verse desacopla-da.
100JOM - Transformaciones Lineales
Capítulo 6
Aplicaciones
Resumen:
Finalmente veremos unas aplicaciones para los
temas de esta parte del libro.
La primera es la canonización de ecuaciones de
segundo grado: una aplicación geométrica que con-
siste en encontrar la ubicación de los ejes princi-
pales de cónicas o cuádricas en posiciones genera-
les respecto de un sistema de coordenadas. Inter-
vienen los cambios de base rotación —elección de
un nuevo sistema de coordenadas, rotado respec-
to del canónico—; y una posterior transformación
no lineal de traslación. La ecuación referida a los
nuevos ejes son canónicas —del tipo más sencillo
posible; como los que se estudian en la parte 2—.
La segunda es la presentación de un método pararesolver en forma matricial ecuaciones diferencia-les ordinarias con coeficientes constantes, de cual-quier orden; procedimiento que descansa en unadiagonalización.
101

Capítulo 6. Aplicaciones 6-1. Vector mediante su matriz de Coordenadas
6-1.Vector mediante su matriz de Coordenadas . . . . . . . . . . . . . 102
6-2.Secciones Cónicas y superficies cuádricas . . . . . . . . . . . . . 103
6-3.Canonización de Cónicas . . . . . . . . . . . . . . . . . . . . . . . . 104
6-3.1. Rotación de los ejes en el plano . . . . . . . . . . . . . . . 108
6-3.2. Ubicación del sistema rotado . . . . . . . . . . . . . . . . . 111
6-3.3. Traslación de los ejes (Plano) . . . . . . . . . . . . . . . . 112
6-3.4. Ubicación del sistema trasladado . . . . . . . . . . . . . . 114
6-4.Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 118
6-4.1. Análisis de algunas posibilidades . . . . . . . . . . . . . . 119
6-5.Canonización de cuádricas . . . . . . . . . . . . . . . . . . . . . . . 119
6-5.1. Rotación de los ejes en el espacio . . . . . . . . . . . . . . 122
6-5.2. Traslación de los ejes en el espacio . . . . . . . . . . . . . 125
Propuesta
La razón por la que incluimos muchos ejercicios en el cuerpo deeste texto es para que una vez terminado de resolverlo puedas pre-guntarte qué y cómo los has hecho, y fundamentalmente: ¿hay algogenérico que pueda aprovechar a partir del mismo? Analizar el re-sultado es más importante que resolver bien un ejercicio.
A lo largo de la carrera verás que hay otras aplicaciones inclusomás interesante que ésta, pero es pertinente por estar auto-referidadentro de la misma asignatura con el libro 2.
6-1. Vector mediante su matriz de Coordenadas
Pensemos en un vector del plano v = (x , y) dado por sus coordenadassobre una base, supongamos la canónica
[ v ] =
[x
y
](6.1)
La traspuesta de [ v ] será la matriz fila
[ v ]> =[x y
](6.2)
y el producto matricial será
[ v ]> [ v ] =[x y
] [ xy
]= x2 + y2 (6.3)
un escalar !! —o una matriz de 1× 1—.
102JOM - Transformaciones Lineales
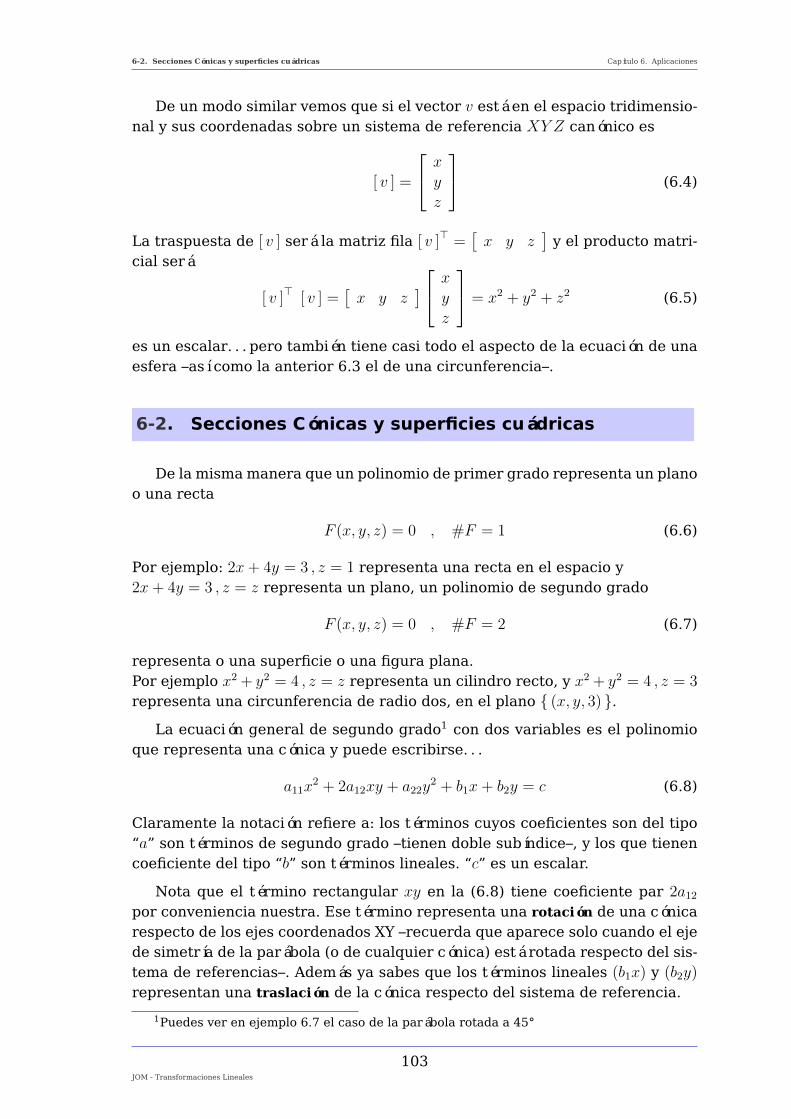
6-2. Secciones Cónicas y superficies cuádricas Capítulo 6. Aplicaciones
De un modo similar vemos que si el vector v está en el espacio tridimensio-nal y sus coordenadas sobre un sistema de referencia XY Z canónico es
[ v ] =
x
y
z
(6.4)
La traspuesta de [ v ] será la matriz fila [ v ]> =[x y z
]y el producto matri-
cial será
[ v ]> [ v ] =[x y z
] x
y
z
= x2 + y2 + z2 (6.5)
es un escalar. . . pero también tiene casi todo el aspecto de la ecuación de unaesfera –así como la anterior 6.3 el de una circunferencia–.
6-2. Secciones Cónicas y superficies cuádricas
De la misma manera que un polinomio de primer grado representa un planoo una recta
F (x, y, z) = 0 , #F = 1 (6.6)
Por ejemplo: 2x+ 4y = 3 , z = 1 representa una recta en el espacio y2x+ 4y = 3 , z = z representa un plano, un polinomio de segundo grado
F (x, y, z) = 0 , #F = 2 (6.7)
representa o una superficie o una figura plana.Por ejemplo x2 + y2 = 4 , z = z representa un cilindro recto, y x2 + y2 = 4 , z = 3
representa una circunferencia de radio dos, en el plano { (x, y, 3) }.
La ecuación general de segundo grado1 con dos variables es el polinomioque representa una cónica y puede escribirse. . .
a11x2 + 2a12xy + a22y
2 + b1x+ b2y = c (6.8)
Claramente la notación refiere a: los términos cuyos coeficientes son del tipo“a” son términos de segundo grado –tienen doble subíndice–, y los que tienencoeficiente del tipo “b” son términos lineales. “c” es un escalar.
Nota que el término rectangular xy en la (6.8) tiene coeficiente par 2a12por conveniencia nuestra. Ese término representa una rotación de una cónicarespecto de los ejes coordenados XY –recuerda que aparece solo cuando el ejede simetría de la parábola (o de cualquier cónica) está rotada respecto del sis-tema de referencias–. Además ya sabes que los términos lineales (b1x) y (b2y)
representan una traslación de la cónica respecto del sistema de referencia.
1Puedes ver en ejemplo 6.7 el caso de la parábola rotada a 45°
JOM - Transformaciones Lineales
103
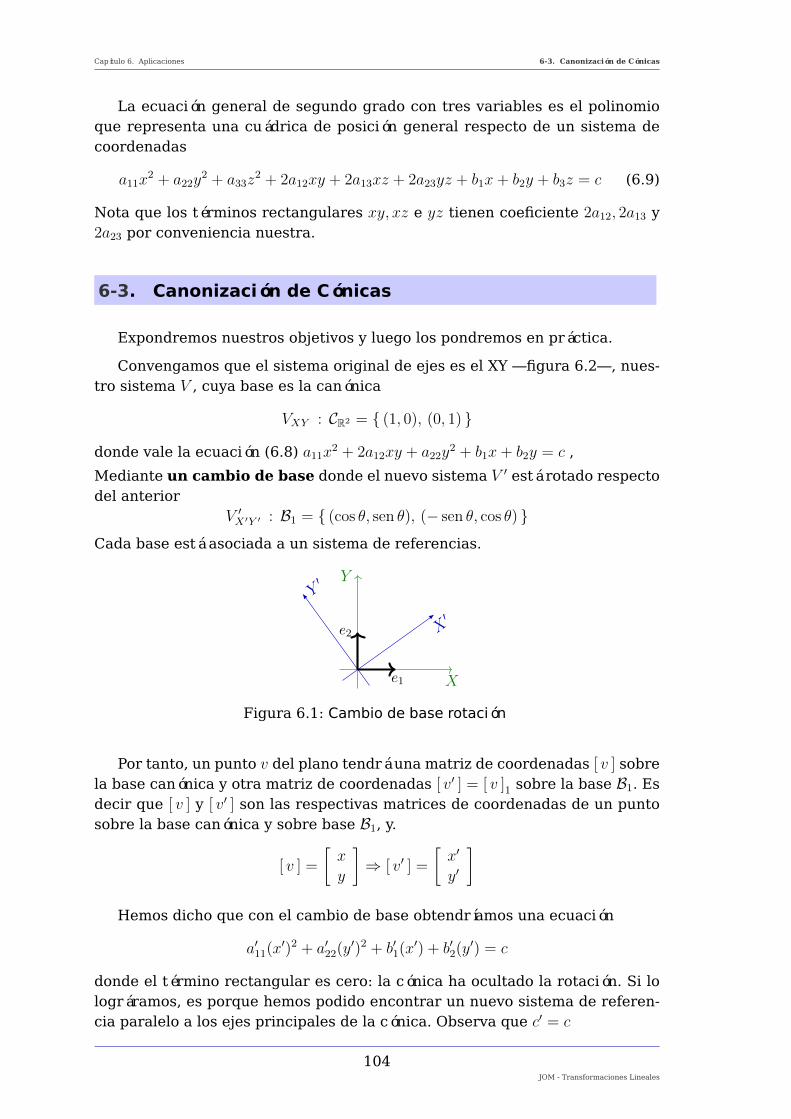
Capítulo 6. Aplicaciones 6-3. Canonización de Cónicas
La ecuación general de segundo grado con tres variables es el polinomioque representa una cuádrica de posición general respecto de un sistema decoordenadas
a11x2 + a22y
2 + a33z2 + 2a12xy + 2a13xz + 2a23yz + b1x+ b2y + b3z = c (6.9)
Nota que los términos rectangulares xy, xz e yz tienen coeficiente 2a12, 2a13 y2a23 por conveniencia nuestra.
6-3. Canonización de Cónicas
Expondremos nuestros objetivos y luego los pondremos en práctica.
Convengamos que el sistema original de ejes es el XY —figura 6.2—, nues-tro sistema V , cuya base es la canónica
VXY : CR2 = { (1, 0), (0, 1) }
donde vale la ecuación (6.8) a11x2 + 2a12xy + a22y2 + b1x+ b2y = c ,
Mediante un cambio de base donde el nuevo sistema V ′ está rotado respectodel anterior
V ′X′Y ′ : B1 = { (cos θ, sen θ), (− sen θ, cos θ) }
Cada base está asociada a un sistema de referencias.
X
YY′
X′
e1
e2
Figura 6.1: Cambio de base rotación
Por tanto, un punto v del plano tendrá una matriz de coordenadas [ v ] sobrela base canónica y otra matriz de coordenadas [ v′ ] = [ v ]1 sobre la base B1. Esdecir que [ v ] y [ v′ ] son las respectivas matrices de coordenadas de un puntosobre la base canónica y sobre base B1, y.
[ v ] =
[x
y
]⇒ [ v′ ] =
[x′
y′
]Hemos dicho que con el cambio de base obtendríamos una ecuación
a′11(x′)2 + a′22(y
′)2 + b′1(x′) + b′2(y
′) = c
donde el término rectangular es cero: la cónica ha ocultado la rotación. Si lolográramos, es porque hemos podido encontrar un nuevo sistema de referen-cia paralelo a los ejes principales de la cónica. Observa que c′ = c
104JOM - Transformaciones Lineales

6-3. Canonización de Cónicas Capítulo 6. Aplicaciones
X
Y
y′
E
x
vy X′′
y′0
Y′′
Y′
θ
X′
x′0
x′
Figura 6.2: Canonización de cónicas
Luego, mediante la técnica de completar cuadrados sería sencillo encon-trar un sistema V ′′ donde tenga validez la ecuación
a′′11(x′′)2 + a′′22(x
′′)2 = c′′
que significará una traslación del sistema V ′′ respecto del sistema V ′ –ahorasí el coeficiente c en general habrá cambiado a c′′ por la acción de completarcuadrados–. Entonces habríamos podido encontrar un sistema de referenciacoincidente con los ejes principales de la cónica.
En esta última instancia decimos que la ecuación de la cónica está cano-nizada. Es decir: obtenemos un sistema de referencias respecto de la cual lacónica está en la posición canónica —con centro en el origen para el caso dela elipse, circunferencia e hipérbola, y vértice en el origen, para el caso de laparábola—, y por tanto la ecuación «está bien comportada» .
Un concepto importante es que el lugar geométrico de la cónica noha cambiado, lo que hemos cambiado nada más es la ecuación de la cónicaporque la estamos refiriendo en general a un sistema que ha rotado y se hadesplazado convenientemente .
JOM - Transformaciones Lineales
105

Capítulo 6. Aplicaciones 6-3. Canonización de Cónicas
a11x2 + 2a12xy + a22y
2 + b1x+ b2y = c
⇓ Rotación de Sistema de referen-cia
a′11(x′)2 + a′22(y
′)2 + b′1(x′) + b′2(y
′) = c
⇓ Traslación de Sistema de refe-rencia
a′′1(x′′)2 + a′′2(y′′)2 = c′′
Hasta acá nuestro objetivo, no sabemos aún cómo lo lograremos.
Volvamos a la (6.3), pag.102 ¿Cómo haríamos para que la parte
a11x2 + 2a12xy + a22y
2
deviniera en
a′11x′2 + a′22y
′2
mediante un cambio de base?
Es evidente que ha de intervenir una matriz de cambio de base. Repitamos loque tenemos
[v]> [v] =[x y
] [ xy
]= x2 + y2
Si intercaláramos la matriz identidad obtendríamos . . .
[v]> I [v] =[x y
] [ 1 0
0 1
] [x
y
]= x2 + y2
. . . la idea que le sigue es inmediata
[v]> A [v] =[x y
] [ a11 0
0 a22
] [x
y
]= a11x
2 + a22y2 (6.10)
ahora sólo nos falta el término rectangular . . . podemos lograrlo con la matrizA tal que por ejemplo
[x y
] [ a11 2a120 a22
] [x
y
]= a11x
2 + a12xy + a22y2
Recuerda que hemos propuesto hacer un cambio de base rotación, de maneraque el nuevo sistema de referencias sólo esté rotado respecto del original. En-tonces los vectores de la nueva base2 deben ser normales entre sí,. . . es decir:
2Que dan la dirección de los ejes del nuevo sistema de referencia.
106JOM - Transformaciones Lineales

6-3. Canonización de Cónicas Capítulo 6. Aplicaciones
esa matriz A que hemos de usar, debe admitir autovectores normales entre sí.Una forma de asegurarnos autovectores normales –y matrices diagonalizantescon columnas ortogonales entre sí– es usar una matriz simétrica. La matrizsimétrica apropiada para escribir esa cuenta en forma matricial es
A =
[a11 a12a12 a22
](6.11)
de modo que
[v]>A [ v ] =[x y
] [ a11 a12a12 a22
] [x
y
]
=[x y
] [ a11x+ a12y
a12x+ a22y
]= a11x
2 + 2a12xy + a22y2
o sea que la primera parte de la ecuación general de la cónica 6.8 ya estádesarrollada3.
Para trabajar en forma matricial la otra parte de (6.8), propongamos unamatriz B tal que
B =[b1 b2
](6.12)
entonces podremos escribir
B [v] =[b1 b2
] [ xy
]= b1x+ b2y
por lo que
c = a11x2 + 2a12xy + a22y
2 + b1x+ b2y (6.13)
= [v]>A [v] +B [v] (6.14)
éstas dos formas de describir la ecuación general de la cónica son las formasescalar y matricial respectivamente.
Ejemplo 6.1. Escribe en forma matricial la ecuación de la cónica
7x2 − 6√
3xy + 12√
3x+ 13y2 + 12y + 292− 64√
3y + 64x = 16
p
3Y se conoce también como «forma cuadrática» , como particular forma bilineal. Estasformas son operadores entre un espacio vectorial y un espacio vectorial real.
JOM - Transformaciones Lineales
107

Capítulo 6. Aplicaciones 6-3. Canonización de Cónicas
Lo que corresponde que hagamos es ordenar y elegir —por inspección—las variables
7x2 − 6√
3xy + 13y2 +(
12√
3 + 64)x+
(12− 64
√3)y = 16− 292 = −276
en donde, y de acuerdo con lo que hemos discutido
[v] =
[x
y
]
A =
7 −3√
3
−3√
3 13
; B =[
12√
3 + 64 2− 64√
3
]y para comprobarlo,
[x y
] [ 7 −3√
3
−3√
3 13
][x
y
]+[
12√
3 + 64 12− 64√
3
] [ xy
]= 7x2 − 6
√3xy + 13y2 + 12
√3x+ 64x+ 12y − 64
√3y
consecuentemente con
[v]>A [v] +B [v] = −276
quedaría respondida la consigna.y
6-3.1. Rotación de los ejes en el plano
El cambio de base que hemos de proponer es el cambio de base4 de modoque
[v] = Rθ [v′] (6.15)
donde [v] y [v′] son el mismo punto referido al sistema original y al sistemarotado respectivamente. Esta expresión puesta en la (6.14) ecuación generalmatricial de la cónica . . .
c = [ v ]>A [ v ] +B [ v ] (6.16a)
= (Rθ [ v′ ])>A (Rθ [ v′ ]) +B (Rθ [ v′ ])
= [ v′ ]>R>θ ARθ [ v′ ] +BRθ [ v′ ]
= [ v′ ]>
DA [ v′ ] +B′ [ v′ ] (6.16b)
4Recordemos la (1.3), en la pág.3. [v] = [B2] [v]2 donde [B2] es la matriz de coordenadasde la nueva base (Rθ) respecto de la base canónica (sistema V ) ; y [v]2 es un vector cualquiera([v′]) referido al sistema de referencia o base B2 (sistema V ′).. Finalmente [v] es el mismovector escrito sobre la base canónica.
108JOM - Transformaciones Lineales

6-3. Canonización de Cónicas Capítulo 6. Aplicaciones
donde es evidente que quisiéramos el cumplimiento de
DA = R>θ A Rθ
porque de esa manera la cónica referida al nuevo sistema de ejes —la nuevabase— se vería sin rotación, es decir con la misma estructura que la (6.10). Esdecir que el objetivo es un cambio de bases adecuado como para que DA seadiagonal.
¿Cómo encontraremos la matriz Rθ que diagonalice A?.
Lo que diagonaliza A es su propia matriz de autoversores ortogonales...Y como A la hemos elegido simétrica, esto está asegurado.
De acuerdo con la (5.1) –DA = V −1AV – que vale para las diagonalizaciones,¿Cómo haremos para que R>θ = R−1θ ?.
Hay que considerar que Rθ es una matriz ortogonal.
Debes hacer que los ejes roten solamente5, vale decir que det (Rθ) sea iguala 1 y no a −1.
Todo se aclara con el ejemplo
Ejemplo 6.2. Realiza un cambio de base rotación para el ejemplo 6.1 anterior.pLa ecuación anterior . . .
7x2 − 6√
3xy + 13y2 +(
12√
3 + 64)x+
(12− 64
√3)y = −276
la puedes introducir en una calculadora adecuada y obtener su grafo. . .
X
Y
-7 -6 -5 -4 -3 -2 -1
1
2
3
4
y la acabamos de escribir matricialmente haciendo
A =
[7 −3
√3
−3√
3 13
]; B =
[12√
3 + 64 12− 64√
3]
5Hemos optado por conservar que cualquier sistema de ejes (base) sea «a derechas» ,por eso exiges que la nueva base esté solamente rotada; de lo contrario se incorporaría unareflexión adicional, que cambiaría el sentido de algún eje, lo cual te interesa evitar. Esa es larazón por la que mantenemos que |Rθ| = 1.
JOM - Transformaciones Lineales
109

Capítulo 6. Aplicaciones 6-3. Canonización de Cónicas
−276 = [ v ]>[
7 −3√
3
−3√
3 13
][ v ] +
[12√
3 + 64 12− 64√
3]
[ v ]
# diagonalicemos A =
7 −3√
3
−3√
3 13
,
el polinomio característico es
πA (λ) = λ2 − 20λ+ 64
= (λ− 4) (λ− 16) = 0
y los autovalores son
λ1 = 16 , λ2 = 4
por tanto los autovectores son,
v1 =
[1
−√
3
]↔ 16 , v2 =
[ √3
1
]↔ 4
y la matriz de rotación
Rθ =
12
√32
−√3
212
como el determinante de esta matriz es 1, no intercambiemos v1 y v2, deese modo
Rθ =1
2
1√
3
−√
3 1
de6 manera que
DA = 2
[1√
3
−√
3 1
]−1 [7 −3
√3
−3√
3 13
]1
2
[1√
3
−√
3 1
]
=
[16 0
0 4
]cuenta innecesaria, ya que los autovalores de A estarán enDA en el mismoorden en que hemos formado Rθ, y en este caso no hemos intercambiadoel orden de los autoversores.La matriz B′ quedará
B′ = B Rθ
=1
2
[12√
3 + 64 12− 64√
3
] [ 1√
3
−√
3 1
]
=[
128 24]
=[b′1 b′2
]6El inexperto se sorprenderá al calcular 1
2
∣∣∣∣[ 1√3
−√3 1
]∣∣∣∣ = 2 en lugar de 1, olvidándose que
|k [A]| = kn · |[A]| donde n es la dimensión de A.
110JOM - Transformaciones Lineales

6-3. Canonización de Cónicas Capítulo 6. Aplicaciones
De esta manera el sistema cambiado de coordenadas es
16(x′)2 + 4(y′)2 + 128x′ + 24 y′ = −276
y ya está.y
Con ello hemos eliminado el término rectangular. En términos de nuestroproblema, hemos calculado todo lo necesario para caracterizar el sistema dereferencias rotado V ′. El paso siguiente es explicitarlo.
6-3.2. Ubicación del sistema rotado
Necesitamos explicitar el sistema de referencia V ′ —dado por los ejes X ′−Y ′— que han rotado respecto del sistema original V dado por los ejes X − Y .Y continuaremos haciéndolo desarrollando el mismo ejemplo.
Ejemplo 6.3. La discusión ahora se centrará en los nuevos ejes X ′Y ′
pDescribiremos dos formas de encontrarlos:
una forma consiste en conocer —aproximadamente en el caso general,pero exacto en este caso— el ángulo definido por Rθ
Rθ =1
2
[1
√3
−√
3 1
]=
[cos (θ) − sin (θ)
sin (θ) cos (θ)
](6.17)
de ahí que el ángulo de rotación es
θ = tan−1(−√
3)≈ −60◦ (6.18)
o sea que el nuevo sistema V ′ estará rotado −60◦ respecto del sistema7
original V . Sin embargo este método no funcionará en el espacio (con lascuádricas), por lo que es mejor...
La otra forma. Consiste directamente en aprovechar la relación cambiode base (revisa la primera nota al pié en la sección 6-3.1)
v
C B1Rθ
[ v ] [ v ]1 = [ v′ ]
[ v ] = Rθ[v′]
= Rθ [ v ]1
7Un error frecuente en los principiantes es atribuir el giro en sentido contrario al quemarca la relación v = Rθ v
′
JOM - Transformaciones Lineales
111

Capítulo 6. Aplicaciones 6-3. Canonización de Cónicas
que habíamos impuesto y razonar así: el versor I ′ correspondiente al ejeX ′ de la base B1, se escribe –v es en particular I ′ en este momento–
[I ′]1
=
[1
0
]1
respecto de la base de V ′; pero se escribirá respecto de la base —canónica— del sistema V original como
[I ′]
= Rθ[I ′]1
= Rθ
[1
0
]1
=1
2
[1
−√
3
]≈
[0. 50000
−0. 86603
]
y ahí ubicamos el eje X ′ respecto del sistema XY (8).El eje Y ′ estará correctamente ubicado a 90◦ a la derecha de X ′, ya que elcambio de base elegido fue una rotación pura, sin reflexión.En otras palabras: la matriz Rθ es la matriz de las coordenadas de los vec-tores de la nueva base, escritos sobre la base canónica, que es el sistemade referencias original !!.y
Como conclusión diremos que la matriz de rotación Rθ tiene toda la infor-mación para trazar los nuevos ejes del sistema de referencia V ′ respecto delsistema de referencia original V . Para que este nuevo sistema sea dextrógiro,—I ′ × J ′ = K ′. . . — el determinante de Rθ debe ser 1 . Cuando uses la matrizcon los autovectores en lugar de los autoversores, la restricción se convierteen |Rθ| > 0, que de no cumplirse debes intercambiar un par de autovectores—y correspondientemente los autovalores asociados—, o multiplicar un auto-vector por −1. Esto es válido para matrices cuadradas de cualquier dimensión.
Los ejes del sistema de referencias rotado tienen lasdirecciones respecto del sistema original, en las colum-nas de Rθ, y ésta es ortogonal: sus columnas son verso-res normales entre sí.
6-3.3. Traslación de los ejes (Plano)
Una vez que tenemos rotado la ecuación general, la ecuación respecto delsistema V ′ queda a′11(x
′)2 + a′22(y′)2 + b′1(x
′) + b′2(y′) = c, en la que agrupando y
8Lógicamente Rθ tiene en sus columnas los versores de los nuevos ejes rotados escritossobre la base original, así que esta cuenta es superflua, la mostramos con fines didácticos.
112JOM - Transformaciones Lineales

6-3. Canonización de Cónicas Capítulo 6. Aplicaciones
extrayendo factor común tenemos
c = a′11((x′)2 + 2b1(x
′))
+ a′22((y′)2 + 2b2(y
′))
donde bi =b′i
2a′i
= a′11
((x′)2 + 2b1(x
′) + b2
1
)− a′11b
2
1+
+ a′22
((y′)2 + 2b2(y
′) + b2
2
)− a′22b
2
2
de donde
a′11(x′ + b1
)2+ a′22
(x′ + b2
)2= c+ a′11b
2
1 + a′22b2
2 = c′′
efectuando el cambio de coordenadasx′′ = x′ +
b′12a′11
y′′ = y′ +b′2
2a′22
(6.19)
o lo que es lo mismo
v′′ = v′ + v0
tenemos la ecuación de la cónica está canonizada
a′11(x′′)2 + a′22 (y′′)
2= c′′(
x′′
a′′1
)2
+
(y′′
a′′2
)2
= 1 donde a′′i =√c′′/a′ii (6.20)
El ejemplo siguiente puede servir para clarificarlo.
Ejemplo 6.4. Continua con la canonización de la ecuación del ejemplo 6.3 ante-rior.pteníamos
16(x′)2 + 4(y′)2 + 128x′ + 24 y′ = −276
o
−276 = 16(x′)2 + 128x′ + 4(y′)2 + 24 y′
= 16((x′)2 + 2 · 4x′ + 16
)− 162
+ 4((y′)2 + 2 · 3y′ + 9
)− 36
= 16(x′ + 4
)2+ 4
(y′ + 3
)2 − 292
entonces
16(x′ + 4
)2+ 4
(y′ + 3
)2= 16
y finalmente, haciendo v′′ = v′ + (4, 3)(x′′)2
+1
4
(y′′)2
= 1
es una elipse de semiejes de longitud 1 y 2 respecto de los ejes X ′′ e Y ′′
y
JOM - Transformaciones Lineales
113

Capítulo 6. Aplicaciones 6-3. Canonización de Cónicas
6-3.4. Ubicación del sistema trasladado
Seguimos desarrollando la teoría con el mismo ejemplo...
Ejemplo 6.5. Haz un bosquejo de la ubicación del sistema V ′′ respecto delsistema V ′
pPara encontrar el sistema V ′′ trasladado en función del sistema V ′ loúnico que debemos hacer es ver dónde está el origen del sistema V ′′
respecto del sistema V ′, ya que solo hay una traslación
X ′′
Y ′′
X ′
Y ′
θ′′
θ′
4
3
x′′ = x′ + 4
y′′ = y′ + 3
nota el sentido de v0. De ese modo el centro de la elipse θ′′ o el origen deV ′′ ≡ X ′′Y ′′ está en el punto (−4,−3) del sistema X ′Y ′.
Podemos reunir entonces las dos ubicaciones de los cambios de sistemade referencia que hemos realizado:La rotación Rθ
X
Y
X ′
Y ′
θ′ ≡ θRθ =
1
2
[1√
3
−√
3 1
]
La traslación v0
X
Y
X ′
Y ′
X ′′
Y ′′
θ′
θ′′
x′′ = x′ + 4
y′′ = y′ + 3
y finalmente el grafo de la cónica canonizada
114JOM - Transformaciones Lineales

6-3. Canonización de Cónicas Capítulo 6. Aplicaciones
X
Y
X ′′
Y ′′
θ′
θ′′
y
Ejercicio 6.1. Verifica que si hubieses intercalado los autovalores, la ecua-ción hubiera sido
1
22(x′′)2 + (y′′)2 = 1
pero los ejes también se hubieran intercambiado, y el grafohubiese sido el mismo.
Ejercicio 6.2. Canoniza 4x2 +√
3xy + 5y2 + 4x = 8. Grafica
Ejercicio 6.3. ¿Qué representan los autoversores de la matriz de los coefi-cientes A ?
Ejemplo 6.6. Canoniza la ecuación 2x · y = 1.p
En este caso tenemos que A =
[0 1
1 0
]y B = [ 0 0 ], los pares autovalor-
autovector de A son{ (
1, (x, x)),(− 1, (−x, x)
) }, de donde la matriz de
cambio de base rotación es R = 1√2
[1 −1
1 1
]Por tanto DA =
[1 0
0 −1
]con lo que
x′2 − y′2 = 1
que no es más que la hipérbola y = 12x .
Para identificar los ejes rotados, nada más tienes que verificar que el au-tovalor 1 —cuyo autovector asociado es (1, 1) está marcando la direccióndel eje X ′— ha quedado ligado a la variable x′.
JOM - Transformaciones Lineales
115
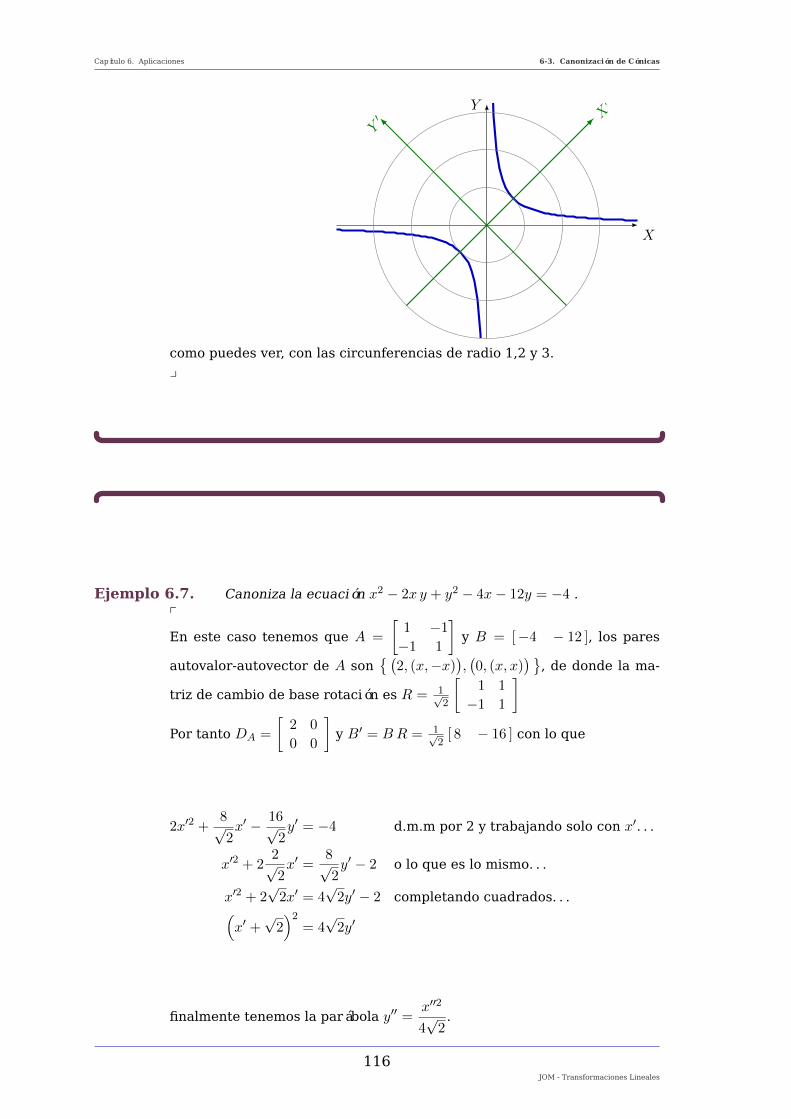
Capítulo 6. Aplicaciones 6-3. Canonización de Cónicas
X
YX′
Y′
como puedes ver, con las circunferencias de radio 1,2 y 3.y
Ejemplo 6.7. Canoniza la ecuación x2 − 2x y + y2 − 4x− 12y = −4 .p
En este caso tenemos que A =
[1 −1
−1 1
]y B = [−4 − 12 ], los pares
autovalor-autovector de A son{ (
2, (x,−x)),(0, (x, x)
) }, de donde la ma-
triz de cambio de base rotación es R = 1√2
[1 1
−1 1
]Por tanto DA =
[2 0
0 0
]y B′ = BR = 1√
2[ 8 − 16 ] con lo que
2x′2 +8√2x′ − 16√
2y′ = −4 d.m.m por 2 y trabajando solo con x′. . .
x′2 + 22√2x′ =
8√2y′ − 2 o lo que es lo mismo. . .
x′2 + 2√
2x′ = 4√
2y′ − 2 completando cuadrados. . .(x′ +
√2)2
= 4√
2y′
finalmente tenemos la parábola y′′ =x′′2
4√
2.
116JOM - Transformaciones Lineales

6-3. Canonización de Cónicas Capítulo 6. Aplicaciones
X
YY′
Y ′′
X ′′
{ (2, (x,−x)
),(0, (x, x)
) }R = 1√
2
[1 1
−1 1
]como puedes ver, con las circunferencias de radio 1,2 y 3.Tenemos aún una palabra para verificar el vértice de la parábola:Respecto del sistema de referencias X ′Y ′ el vértice es [Ve]1 =[−√
2
0
]X′Y ′
, se escribirá en la base canónica como [Ve] = R[Ve]1, en este
caso
[Ve]0 =1√2
[1 1
−1 1
] [−√
2
0
]=
[−1
1
]XY
Como puedes observar en la figura.Intercambio de ejesVeamos qué sucede cuando tomamos la matriz R con otro orden: en estecaso los pares autovalor-autovector de A son
{ (0, (x, x)
),(2, (−x, x)
) }, de
donde la matriz de cambio de base rotación es R1 = 1√2
[1 −1
1 1
]Por tanto DA1 =
[0 0
0 2
]y B′1 = BR1 = 1√
2[−16 − 8 ] con lo que
2y′2 − 16√2y′ − 8√
2x′ = −4 d.m.m por 2 y trabajando solo con x′. . .
y′2 − 2 ·√
2y′ = 4√
2x′ − 2 completando cuadrados. . .(y′ −
√2)2
= 4√
2x′
finalmente tenemos la parábola x′′ =y′′2
4√
2, aparentemente distinto al re-
sultado al que habíamos arribado anteriormente. Sin embargo falta bos-quejar el nuevo sistema de referencias donde el autovalor 2, está conecta-do con la dirección Y ′, (−1, 1), con lo cual, tenemos la figura;
JOM - Transformaciones Lineales
117
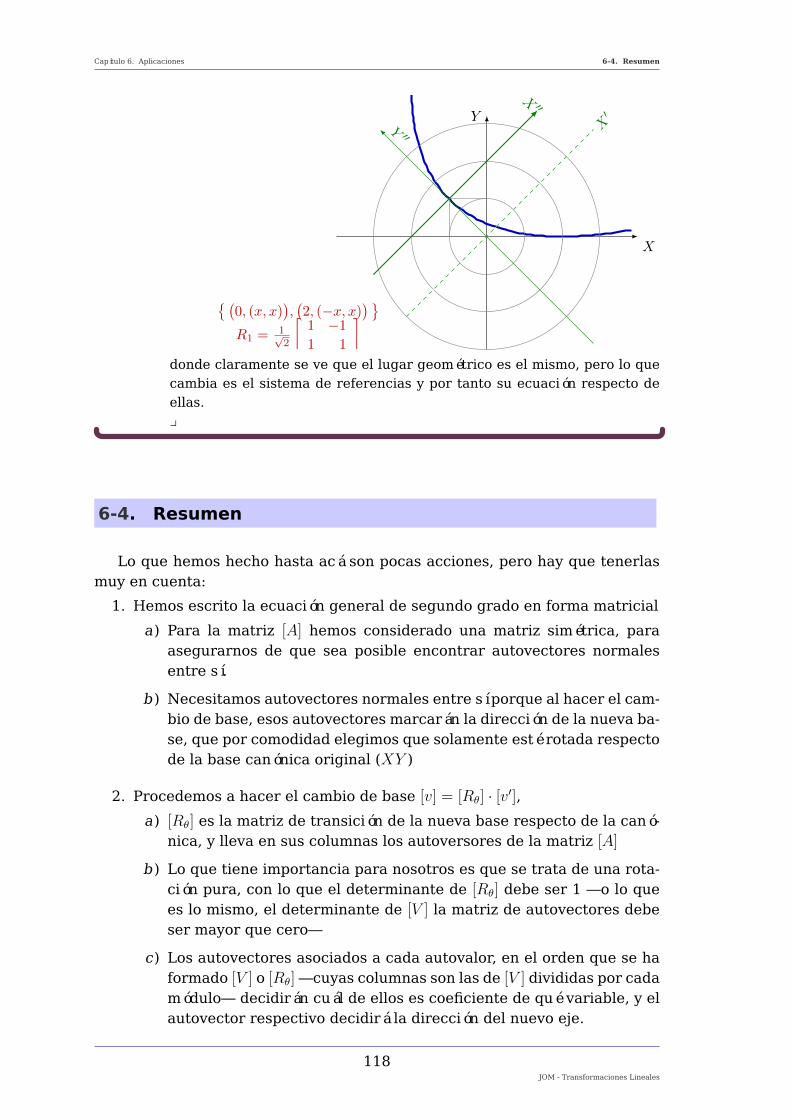
Capítulo 6. Aplicaciones 6-4. Resumen
X
YX′
X ′′
Y ′′
{ (0, (x, x)
),(2, (−x, x)
) }R1 = 1√
2
[1 −1
1 1
]donde claramente se ve que el lugar geométrico es el mismo, pero lo quecambia es el sistema de referencias y por tanto su ecuación respecto deellas.y
6-4. Resumen
Lo que hemos hecho hasta acá son pocas acciones, pero hay que tenerlasmuy en cuenta:
1. Hemos escrito la ecuación general de segundo grado en forma matricial
a) Para la matriz [A] hemos considerado una matriz simétrica, paraasegurarnos de que sea posible encontrar autovectores normalesentre sí.
b ) Necesitamos autovectores normales entre sí porque al hacer el cam-bio de base, esos autovectores marcarán la dirección de la nueva ba-se, que por comodidad elegimos que solamente esté rotada respectode la base canónica original (XY )
2. Procedemos a hacer el cambio de base [v] = [Rθ] · [v′],a) [Rθ] es la matriz de transición de la nueva base respecto de la canó-
nica, y lleva en sus columnas los autoversores de la matriz [A]
b ) Lo que tiene importancia para nosotros es que se trata de una rota-ción pura, con lo que el determinante de [Rθ] debe ser 1 —o lo quees lo mismo, el determinante de [V ] la matriz de autovectores debeser mayor que cero—
c) Los autovectores asociados a cada autovalor, en el orden que se haformado [V ] o [Rθ] —cuyas columnas son las de [V ] divididas por cadamódulo— decidirán cuál de ellos es coeficiente de qué variable, y elautovector respectivo decidirá la dirección del nuevo eje.
118JOM - Transformaciones Lineales

6-5. Canonización de cuádricas Capítulo 6. Aplicaciones
3. Luego del cambio de base nos resta hacer una traslación de los nue-vos ejes, lo cual logramos simplemente completando cuadrados. —ten encuenta las «buenas costumbres» de dejar primero polinomios mónicos,y luego balancear correctamente la ecuación—
4. Finalmente tendremos la ecuación general referida a un sistema de refe-rencia —X ′′Y ′′— de tal manera que su origen coincida con el centro —dela elipse o de la hipérbola—, o con el vértice —de la parábola—.
6-4.1. Análisis de algunas posibilidades
Hemos visto que el cambio de base adecuado nos lleva a una matriz DA
donde se ven los autovalores de [A]. Supongamos que ellos fueran λ1 y λ2.Analicemos los casos posibles. Supondremos que c′′ es el término indepen-diente que queda luego de realizada la traslación—es decir λ1(x′ − x0)2 + λ2(y
′ − y0)2 = c′′—
• λ1 > λ2 > 0 y c′′ > 0 Tendremos entonces una elipse con eje focal Y ′′
—si λ2 > λ1 > 0, el eje focal sería X ′′—.
• λ1 > λ2 > 0 y c′′ < 0 No tendríamos lugar geométrico.
• λ2 < λ1 < 0 y c′′ < 0 De nuevo tendremos una elipse,podemos dividir todo por −1.
• λ1 > 0 > λ2 y c′′ > 0 Tendremos una hipérbola con eje focal X ′′
• λ1 > 0 > λ2 y c′′ < 0 Tendremos una hipérbola con eje focal Y ′′
• λ1 > 0 > λ2 y c′′ = 0 Tendremos un par de rectas.
|λ1|(x′ − x0)2 − |λ2|(y′ − y0)2 = 0 ⇒ (y′ − y0) = ±
√|λ1||λ2|
(x′ − x0)
• λ1 > λ2 > 0 y c′′ = 0 Tendremos solamente el punto (x0, y0)
• λ1 > λ2 = 0 y c′′ = 0 Tendremos una recta { (x0, y) }
• λ1 > λ2 = 0 y c′′ > 0 Tendremos dos rectas: y = x0 ±√
c′′
λ1
¿Porqué no hemos considerado λ1 = λ2?
6-5. Canonización de cuádricas
Repetiremos los mismos conceptos y tomaremos las misma decisiones quelas que hemos transitado en la sección anterior. La ecuación general de se-gundo grado con tres variables es el polinomio (6.5) que repetimos:
a11x2 + a22y
2 + a33z2 + 2a12xy + 2a13xz + 2a23yz + b1x+ b2y + b3z = c (6.21)
JOM - Transformaciones Lineales
119

Capítulo 6. Aplicaciones 6-5. Canonización de cuádricas
donde los términos rectangulares xy, xz e yz tienen coeficientes par por con-veniencia nuestra. Ellos representarán un cambio de base rotación pura, eneste caso dada por una composición de tres rotaciones alrededor de los ejesen el espacio.
Sea el sistema V original de ejes XYZ donde vale la ecuación (6.9), me-diante un cambio de base rotación obtendremos el sistema V ′ donde vale laecuación
a′11(x′)2 + a′22(y
′)2 + a′33(z′)2 + b′1x
′ + b′2y′ + b′3z
′ = c (6.22)
Solamente nos resta completar cuadrados para encontrar un sistema V ′′ dondetenga validez la ecuación
a′11(x′′)2 + a′22(y
′′)2 + a′33 (z′′)2
= c′ (6.23)
Así, la ecuación de la cuádrica está canonizada, y probablemente ya puedasescribir
± (x′′)2
(a′′)2± (y′′)2
(b′′)2± (z′′)2
(c′′)2= 1 (6.24)
con los signos que correspondan.
El lugar geométrico de la cuádrica no ha cambiado, las variables la refierena un sistema que ha rotado y se ha desplazado convenientemente .
La primera parte de la (6.21),
a11x2 + a22y
2 + a33z2 + 2a12xy + 2a13xz + 2a23yz
la expresaremos en forma matricial, y propondremos un cambio de bases conlos autovectores de la matriz en cuestión, que como la formaremos simétricasiempre serán tres linealmente independientes y normales entre sí.
La matriz simétrica apropiada para escribir esa cuenta en forma matricialla podemos armar mnemotécnicamente
x y z
x a11 a12y a12 a22z a33
completando... A =
a11 a12 a13a12 a22 a23a13 a23 a33
(6.25)
de modo que
[ v ]>A [ v ] =[x y z
] a11 a12 a13a12 a22 a23a13 a23 a33
x
y
z
=[x y z
] a11x+ a12y + a13z
a12x+ a22y + a23z
a13x+ a23y + a33z
= a11x
2 + a22y2 + a33z
2 + 2a12xy + 2a13xz + 2a23yz
120JOM - Transformaciones Lineales

6-5. Canonización de cuádricas Capítulo 6. Aplicaciones
o sea que la primera parte de la ecuación general de la cuádrica (6.9) ya estádesarrollada con A.
La otra parte es muy simple, si empleáramos una matriz B tal que
B =[b1 b2 b3
](6.26)
podríamos hacer9
B [ v ] =[b1 b2 b3
] x
y
z
= b1x+ b2y + b3z
por lo que
c = a11x2 + a22y
2 + a33z2 + 2a12xy + (6.27)
+2a13xz + 2a23yz + b1x+ b2y + b3z
= [ v ]>A [ v ] +B [ v ] (6.28)
ambas dos representan la misma cuádrica. La versión matricial se adapta anuestros propósitos.
Ejemplo 6.8. Escribe en forma matricial la ecuación de segundo grado. . .
−784 = 1943x2 + 861y2 + 2972z2 − 58√
3xy + 1628xz−
− 884√
3 yz −(
1800√
3 + 3568√
2)x+
+(
1800− 2096√
2√
3)y +
(736√
2− 3600√
3)z
pLa ecuación ya se encuentra correctamente ordenada, entonces las matri-ces son
[ v ] =[x y z
]>A =
1943 −29√
3 814
−29√
3 861 −442√
3
814 −442√
3 2972
B =
−1800√
3− 3568√
2
1800− 2096√
2√
3
736√
2− 3600√
3
>
9Hemos podido haber propuesto B =
b1b2b3
, de modo que [ v ]>B = b1x+ b2y+ b3z, pero
no nos ha interesado.
JOM - Transformaciones Lineales
121

Capítulo 6. Aplicaciones 6-5. Canonización de cuádricas
lo cual puedes comprobarPara responder la consigna establecemos que
[ v ]>A [ v ] +B [ v ] = −784 (6.29)
y
6-5.1. Rotación de los ejes en el espacio
El cambio de base que venimos proponiendo es
[ v ] = Rθ [v′] (6.30)
que en este caso puede ser cualquier combinación Rθ = RX RY RZ ,o RZ RY RX ,o · · · hay 3! = 6 combinaciones posibles; que puesta en la ecua-ción general vectorial y trabajando como en las (6.16a) y (6.16b)
c = [ v ]>A [ v ] +B [ v ]
= [v′]>DA [v′] +B′ [v′]
donde DA = R>θ A Rθ , B′ = B Rθ
Desde aquí todo es similar al procedimiento que hemos contemplado para lascónicas, en particular el hecho de que la nueva base B1 son los vectores dadospor las columnas de Rθ.
Recordemos que hay que hacer que los ejes roten solamente, vale decir quedet (Rθ) sea igual a 1 y no a −1. Si |Rθ| = −1 hemos de intercambiar dos auto-versores —y consecuentemente sus autovalores en la matriz diagonalizada—,o hemos de multiplicar un autoversor por −1 –dejando los autovalores en lamatriz diagonalizada intactos—. Todo se aclara con el ejemplo siguiente.
Ejemplo 6.9. Realiza el cambio de base rotación para el ejemplo 6.8.pLa ecuación anterior ha sido
−784 = 1943x2 + 861y2 + 2972z2 − 58√
3xy + 1628xz−
− 884√
3 yz −(
1800√
3 + 3568√
2)x+
+(
1800− 2096√
2√
3)y +
(736√
2− 3600√
3)z
122JOM - Transformaciones Lineales

6-5. Canonización de cuádricas Capítulo 6. Aplicaciones
y sus matrices
A =
1943 −29√
3 814
−29√
3 861 −442√
3
814 −442√
3 2972
B =
−1800√
3− 3568√
2
1800− 2096√
2√
3
736√
2− 3600√
3
>
# diagonalicemos Ael polinomio característico es
πA(λ) = λ3 − 5776λ2 + 8755200λ− 3317760000 = 0
y los autovalores son
λ1 = 3600 λ2 = 1600 λ3 = 576
por tanto los autovectores son,
v1 =
−√
3
1
−2√
3
v2 =
53
√3
1
−23
√3
v3 =
1
−3√
3
−2
y la matriz de rotación Rθ será
Rθ =1
8
−2√
3 5√
2√
2
2√
6 −3√
6
−4√
3 −2√
2 −2√
2
como el determinante de esta matriz es 1, no intercambiemos v1 y v2, ni v2con v3, de manera que, si las cuentas están bien, no tendremos problemasen llegar a que
DA =
3600 0 0
0 1600 0
0 0 576
(6.31)
porque no hemos intercambiado los autoversores.
# Encontremos B′
La matriz B′ quedará
B′ = B Rθ
=[
7200 −6400 3456]
# Reemplacemos la ecuación originalla ecuación bajo el sistema de coordenadas rotado es
3600(x′)2 + 1600(y′)2 + 576(z′)2 + 7200x′ − 6400 y′ + 3456z′ = −784
Hemos eliminado el término rectangular
JOM - Transformaciones Lineales
123

Capítulo 6. Aplicaciones 6-5. Canonización de cuádricas
# Ubiquemos el sistema V ′ respecto del sistema V
Aprovechemos la relación
[ v ] = Rθ[v′]
m[ v ]V = Rθ [ v ]V ′ ≡ [ v ] = Rθ [ v ]1
que habíamos propuesto y razonemos así:10 el versor I ′ correspondienteal eje X ′ de la base V ′ se escribe
I ′ =
1
0
0
1
= [I]1
respecto de la base V ′; pero se escribirá en la base V original como
[I] = Rθ [I]1 = Rθ
1
0
0
1
=1
8
−2√
3
2
−4√
3
≈ −0.43301
0.25
−0.86603
es la primera columna de la matriz de cambio de base rotación; y ahíubicas el eje X ′ respecto del sistema XY Z(11). El eje Y ′ estará ubicadohaciendo el mismo trabajo para J ′ —la segunda columna de Rθ—, y si-milarmente ubicas el tercer eje. La terna será dextrógira si has tenido laprecaución de que el determinante de Rθ fuera 1 y no −1.
X
Y
Z
X ′Y ′
Z ′
La figura ilustra cómo quedan los ejes del sistema de referencias rotado.y
Ejemplo 6.10. Discute la posibilidad de encontrar autovectores normales en elespacio R3.
10Recordemos que es un cambio de base, no una transformación.11lógicamente Rθ tiene en sus columnas los versores de los nuevos ejes rotados escritos
sobre la base original, así que esta cuenta es superflua.
124JOM - Transformaciones Lineales

6-5. Canonización de cuádricas Capítulo 6. Aplicaciones
pUna alternativa es encontrar dos autovectores y calcular el restante me-diante producto cruz. Esto está asegurado, porque trabajamos con matri-ces simétricas.
v1 × v2 =
∣∣∣∣∣∣∣∣∣
I −
√3
4
53
√3
43
√6
J 14
143
√6
K −2√3
4
− 23
√3
43
√6
∣∣∣∣∣∣∣∣∣
=
18
√2
−38
√6
−14
√2
=1
8
√2
−3√
6
−4√
2
= v3
y ya está.y
6-5.2. Traslación de los ejes en el espacio
La ecuación general para el sistema de referencias rotado X ′Y ′, será
a′11(x′)2 + a′22(y
′)2 + a′33(z′)2 + b′1x
′ + b′2y′ + b′3z
′ = c
en la que agrupando y sacando factor común puedes escribir
a′11 (x′ + x0)2
+ a′22 (y′ + y0)2
+ a′33 (z′ + z0)2
= c′′ donde
x0 =b′1
2a′11, y0 =
b′22a′22
, z0 =b′3
2a′33
c′′ = c+ a′11 x20 + a′22 y
20 + a′33 z
20
y efectuando el cambio de coordenadasx′′ = x′ + x0
y′′ = y′ + y0
z′′ = z′ + z0
(6.32a)
o lo que es lo mismo
v′′ = v′ + v0 (6.32b)
tenemos que la cónica está «casi» canonizada
a′′1(x′′)2 + a′′2(y′′)2 + a′′3(y′′)2 = c′′ (6.33a)
JOM - Transformaciones Lineales
125

Capítulo 6. Aplicaciones 6-5. Canonización de cuádricas
y luego dividiendo por c′′ 6= 0 —puede no darse, y habrá que estudiarlo— yacomodando, en general podrás escribir. . .
1 = ±(x′′)2
(a1)2± (y′′)2
(a2)2± (z′′)2
(a3)2(6.33b)
donde respectivamente
a1 =
√∣∣∣ c′′a′′1 ∣∣∣, a2 =
√∣∣∣ c′′a′′2 ∣∣∣, a3 =
√∣∣∣ c′′a′′3 ∣∣∣Que no siempre habrá de representar una cuádrica con centro, porque
de existir uno o más autovalores iguales a cero, no hubiésemos tenido algúntérmino cuadrático y con ello aparecerían los paraboloides. Además, si en la(6.33a) se diera que c′′ = 0, tendríamos un cono –dos signos iguales para a′′i – oun punto en el espacio –los tres signos iguales–
El ejemplo lo pone más claro todo en el caso c′′ 6= 0.
Ejemplo 6.11. Continúa con la canonización del ejercicio 6.9 anteriorp# Completemos cuadrados perfectos
−784 = 3600(x′)2 + 7200x′ + 1600(y′)2 − 6400 y′ + 576(z′)2 + 3456z′
= 3600((x′)2 + 2x′ 1 + 1− 1
)+
+ 1600((y′)2 − 2 y′ 2 + 4− 4
)+
+ 576((z′)2 + 2z′ 3 + 9− 9
)= 3600
(x′ + 1
)2+ 1600
(y′ − 2
)2+ 576
(z′ + 3
)2 − 15184
es decir:
3600(x′ + 1
)2+ 1600
(y′ − 2
)2+ 576
(z′ + 3
)2= 14400
3600(x′′)2 + 1600(y′′)2
+ 576(z′′)2 = 14400
y finalmente
(x′ + 1)2
22+
(y′ − 2)2
32+
(z′ + 3)2
52= 1
# CanonicemosEntonces, el problema está resuelto en parte si escribiéramos
x′′2
22+y′′2
32+z′′2
52= 1 (6.34)
# Ubiquemos el sistema V ′′ respecto del sistema V ′
126JOM - Transformaciones Lineales

6-5. Canonización de cuádricas Capítulo 6. Aplicaciones
debemos ver dónde está el origen del sistema V ′′ respecto del sistema V ′,ya que solo hay una traslación
x′′ = x′ + 1
y′′ = y′ − 2
z′′ = z′ + 3
(6.35)
de ese modo el
0
0
0
V ′′
=
0
0
0
V ′
+
1
−2
3
V ′
de modo que el origen de
X ′′Y ′′Z ′′ está en el punto
−1
2
−3
V ′
del sistema X ′Y ′Z ′ .
# Repasola secuencia de cambios de coordenadas sigue este patrón1- Dibuja el sistema de coordenadas V —XY Z dextrógiro—
2- Representa los ejes del Sistema V ′ —X ′Y ′Z ′— con los ejes dados porlas columnas de Rθ respecto del sistema V
3- Representa los ejes del sistema V ′′ que es la traslación −v0 del sistemaV ′ respecto del sistema V ′′
4- Dibuja el grafo de la cuádrica canonizada.
X
Y
Z
X ′Y ′
Z ′
X ′′
Y ′′Z ′′
En la figura de arriba, hemos trabajado hasta el paso 3, con la esperanzaen que te sea sencillo representar en él el elipsoide.y
Ejercicio 6.4. Vuelve a trabajar con el ejemplo 6.8, tomando los autovaloresen un orden diferente. Ayuda: Por esta vez, y como el ejercicioestá numéricamente mal condicionado, parte de la ecuaciónaproximada
−78400 = 194300x2 + 86100y2 + 297200z2 +
−100 46xy + 162800xz − 153110yz −−816360x− 333410y − 519450z
y trabaja con decimales en la calculadora
Ejercicio 6.5. Canoniza(a)- 5x2 + 5y2 + 8xy + 4xz + 4yz + 2z2 = 1
JOM - Transformaciones Lineales
127

Capítulo 6. Aplicaciones 6-5. Canonización de cuádricas
(b)- dada por A =
−1 2 0 −2
2 3 0 0
0 0 5 −1
−2 0 −1 6
y B =[
2 1 −4 0]
(Ayuda: la forma cuadrática puede tener más variables, en estecaso puede hacerv> =
[x y z q
]o mejor v> =
[x1 x2 x3 x4
]Ejercicio 6.6. En el ejercicio 6.5, ítem (a), ¿Qué hubiese sucedido en caso
que dos términos cuadráticos fueran iguales y el otro fuera ce-ro?(Ayuda: analízalo teniendo en cuenta las posibilidades respec-to de los autovalores que puedas encontrar en la matriz A)
Hasta ahora hemos trabajado con matrices de dimensión 2× 2 y 3× 3, por-que el tipo de aplicación lo requería, asimismo esas matrices eran simétricas.Sin embargo, ¿qué pasaría si nos interesara individualizar las raíces de lospolinomios característicos de una matriz de dimensiones superiores? Y en lacarrera de ingeniería —sobretodo las que están orientadas al control de siste-mas dinámicos—, aparecerán con seguridad.
La pregunta es:¿Cómo se encuentran los autovalores para matrices de cualquier orden?
En el apéndice —D-3.0.2— hemos desarrollado un algoritmo basado en el mé-todo de Newton para encontrar las raíces del polinomio característico de unamatriz simétrica de 3× 3, pero también encuentras —sección D-3— el métodoaludido para hacerlo en forma genérica.
128JOM - Transformaciones Lineales
Apéndice A
Mapeos de trayectorias en elplano
A-1.Circunferencia y cuadrado unitarios . . . . . . . . . . . . . . . . . 129
A-1.1. Ejemplos con transformaciones lineales . . . . . . . . . . 130
A-1.2. Con transformaciones no lineales . . . . . . . . . . . . . . 133
Cuando se trata de transformaciones en el plano —funciones entre conjun-tos subyacentes de espacios vectoriales T : R2 → R2 que comparten el mismocuerpo de escalares R—, quisiéramos no solamente conocer los transformadosde un vector, sino que de trayectorias. En este apéndice ahondamos en estedetalle, aplicando transformaciones lineales y no lineales
Las trayectorias más comunes que incluso se utilizan para reconocer elefecto de la ley de transformación sobre los vectores del plano son el cua-drado unitario y la circunferencia unitaria, y será cuestión de revisar cómomodelizamos esas trayectorias, para poder someterlas a las transformacionesy luego identificar las trayectorias mapeadas.
A-1. Circunferencia y cuadrado unitarios
Como hemos visto en la sección de modelización de caminos en R2, en la(1-4), el cuadrado unitario lo puedes escribir . . .
en forma desparametrizada
cu =
(k, 0) , k : 0 1
(1, k) , k : 0 1
(k, 1) , k : 1 0
(0, k) , k : 1 0
(A.1)
o en forma paramétrica
cu =
(k, 0) , k ∈ [0, 1]
(1, k − 1) , k ∈ [1, 2]
(3− k, 1) , k ∈ [2, 3]
(0, 4− k) , k ∈ [3, 4]
(A.2)
129

Apéndice A. Mapeos de trayectorias en el plano A-1. Circunferencia y cuadrado unitarios
y para la circunferencia unitaria
ou = (cos k, sen k) , k ∈ [0, 2π] (A.3)
=
{(x,√
1− x2) , x : 1 −1
(x,−√
1− x2) , x : −1 1(A.4)
=
{(1− 2k, 2
√k − k2) , k ∈ [0, 1]
(2k − 3,−2√−2 + 3k − k2) , k ∈ [1, 2]
(A.5)
Analizando las cinco ecuaciones anteriores, las más simples —desde el puntode vista de las cuentas para realizar la transformación— son claramente laec.(A.1) y la ec.(A.3) respectivamente.
En general el proceso de mapeado —hallar el transformado de unatrayectoria— y el proceso de parametrización son antagónicos: cuando unose facilita, el otro se complica. En general a pesar de su posible complica-ción inicial, vale la pena hacerlo todo en la forma paramétrica. Con las trans-formaciones no lineales es particularmente difícil hacerlo, ya sea de una uotra manera; así que en ese caso mejor es conseguirse un software —comoGeogebra— y trabajar en forma parametrizada.
A continuación nos abocaremos a mapear ambas trayectorias mediantetransformaciones lineales y no lineales.
A-1.1. Ejemplos con transformaciones lineales
Recuerda que hallar el transformado de (1, 1) según la transformación conley L1 ((a, b)) = (a+ b, a− b), sería
L1 ((1, 1)) = (1 + 1, 1− 1) = (2, 0)
pero nos interesa calcular no con solamente un punto sino que con una tra-yectoria de puntos como el cuadrado unitario. Para eso necesitamos escribirla trayectoria a transformar como si fuera un vector. . .
Forma desparametrizada
A partir de la ec.(A.1)
L1(cu) =
(k, k) , 0 1
(1 + k, 1− k) , 0 1
(k + 1, k − 1) , 1 0
(k,−k) , 1 0
(A.6)
Forma parametrizada
A partir de la ec.(A.2)
=
(k, k) , k ∈ [0, 1]
(k, 2− k) , k ∈ [1, 2]
(4− k, 2− k) , k ∈ [2, 3]
(4− k, k − 4) , k ∈ [3, 4]
= c′u
(A.7)
Nota que puedes llegar a la (A.7) parametrizando la (A.6).
Nos falta la desparametrización total, escribiendo una coordenada en fun-ción de la otra.
130JOM - Transformaciones Lineales
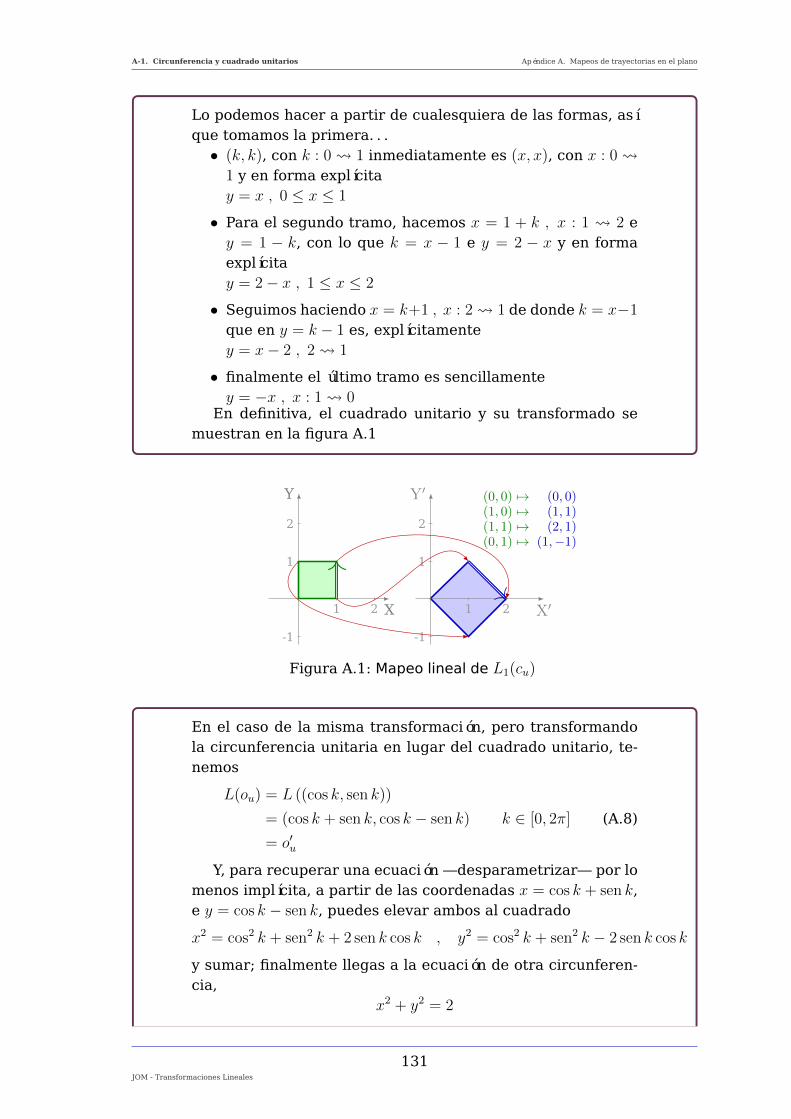
A-1. Circunferencia y cuadrado unitarios Apéndice A. Mapeos de trayectorias en el plano
Lo podemos hacer a partir de cualesquiera de las formas, asíque tomamos la primera. . .• (k, k), con k : 0 1 inmediatamente es (x, x), con x : 0
1 y en forma explícitay = x , 0 ≤ x ≤ 1
• Para el segundo tramo, hacemos x = 1 + k , x : 1 2 ey = 1 − k, con lo que k = x − 1 e y = 2 − x y en formaexplícitay = 2− x , 1 ≤ x ≤ 2
• Seguimos haciendo x = k+1 , x : 2 1 de donde k = x−1
que en y = k − 1 es, explícitamentey = x− 2 , 2 1
• finalmente el último tramo es sencillamentey = −x , x : 1 0
En definitiva, el cuadrado unitario y su transformado semuestran en la figura A.1
1 2
-1
1
2
Y
X 1 2
-1
1
2
Y′
X′
(0, 0) 7→ (0, 0)(1, 0) 7→ (1, 1)(1, 1) 7→ (2, 1)(0, 1) 7→ (1,−1)
Figura A.1: Mapeo lineal de L1(cu)
En el caso de la misma transformación, pero transformandola circunferencia unitaria en lugar del cuadrado unitario, te-nemos
L(ou) = L ((cos k, sen k))
= (cos k + sen k, cos k − sen k) k ∈ [0, 2π] (A.8)
= o′u
Y, para recuperar una ecuación —desparametrizar— por lomenos implícita, a partir de las coordenadas x = cos k + sen k,e y = cos k − sen k, puedes elevar ambos al cuadrado
x2 = cos2 k + sen2 k + 2 sen k cos k , y2 = cos2 k + sen2 k − 2 sen k cos k
y sumar; finalmente llegas a la ecuación de otra circunferen-cia,
x2 + y2 = 2
JOM - Transformaciones Lineales
131

Apéndice A. Mapeos de trayectorias en el plano A-1. Circunferencia y cuadrado unitarios
de radio√
2 (a).
aEn general un mapeo lineal de la circunferencia unitaria nos dará elipses. Pruébalocon la transformación lineal L2((a, b)) = (a + b, 2a − 2b), obtendrás una elipse con ejes1 y 2.
0.5 1.5-0.5
0.5
1.5
Y
X-1 1 2
-1
1
Y′
X′
( 1√2, 1√
2) 7→ (
√2, 0)
Figura A.2: El mismo mapeo lineal de L1(ou)
Ejemplo A.1. Para la TL L2 ( (x, y) ) = (x+y, x−2y), mapea el cuadradito unitario.pel cuadradito unitario se mapea en
L2(Cu) =
(k, k) , 0 1
(k + 1, 1− 2k) , 0 1
(k + 1, k + 2) , 1 0
(k,−2k) , 1 0
≡
(k, k) , [0, 1]
(k, 3− 2k) , [1, 2]
(4− k, 1− k) , [2, 3]
(4− k, 8− 2k) , [3, 4]
≡
y = x , x : 0 1
y = 3− 2x , x : 1 2
y = x− 3 , x : 2 1
y = −2x , x : 1 0
Veamos el mapeo de la c. unitaria y su «desparametrización» :
(cos(k), sen(k)) 7→(
cos(k) + sen(k) , cos(k)− 2 sen(k))
{x = cos(k) + sen(k)
y = cos(k)− 2 sen(k)o sea
x− y = 3 sen(k) y 2x+ y = 3 cos(k) de donde
(x− y)2 + (2x+ y)2 = 9(sen2(k) + cos2(k)) = 9
de donde
5x2 + 2y2 + 2xy = 9 (A.9)
Volveremos a trabajar la elipse rotada (A.9) en el último capítulo. La figuraA.3 concentra los mapeos del cuadradito y de la circunferencia para latransformación L2((a, b)) = (a+ b, a− 2b)
y
132JOM - Transformaciones Lineales

A-1. Circunferencia y cuadrado unitarios Apéndice A. Mapeos de trayectorias en el plano
O A
BC
L2
O′
A′
B′
C ′
X
Y
X
Y
X
Y
Figura A.3: Transformación L2 sobre cu y ou
A-1.2. Con transformaciones no lineales
Usemos el mapeo N : R2 → R2|N((a, b)
)=(a + b, 2a − b2
), ambos espacios
vectoriales reales y estándares —(R2,+,R, ·)—.
Cuadrado unitario. En el cuadro siguiente están las cuentas ya hechas,de modo que no tienes más que verificar.
Forma desparametrizada - explícita
original-mapeado , k mapeado , x
(k, 0) 7→ (k, 2k) , 0 1 y = 2x , 0 1
(1, k) 7→ (k + 1, 2− k2) , 0 1 y = 1 + 2x− x2 , 1 2
(k, 1) 7→ (k + 1, 2k − 1) , 1 0 y = 2x− 3 , 2 1
(0, k) 7→ (k,−k2) , 1 0 y = −x2 , 1 0
Forma Parametrizada
original 7→ mapeado rango k
(k, 0) 7→ (k, 2k) k ∈ [0, 1]
(1, k − 1) 7→ (k, 1 + 2k − k2) k ∈ [1, 2]
(3− k, 1) 7→ (4− k, 5− 2k) k ∈ [2, 3]
(0, 4− k) 7→ (4−k, 16−8k+k2) k ∈ [3, 4]
Cuadro A.1: Mapeo no lineal de N(cu)
Asimismo el mapeo luce como en la figura A.4.
En ella hemos hecho los dos mapeos: el del cuadrado y el de la circunfe-rencia unitarios. El de la última, en este caso, es complicado encontrar unaversión no parametrizada de las ecuaciones que modelizan el transformado
La versión parametrizada es claramente (cos k + sen k, 2 cos k − sen2 k) conk ∈ [0, 2π]. Puedes solicitarme que te envíe por correo electrónico unas versio-nes dinámicas con Geogebra para que puedas experimentar e incluso cambiarlos mapeos, llevan el nombre G_mep-05.ggb y MapeosPlano.ggb.
JOM - Transformaciones Lineales
133
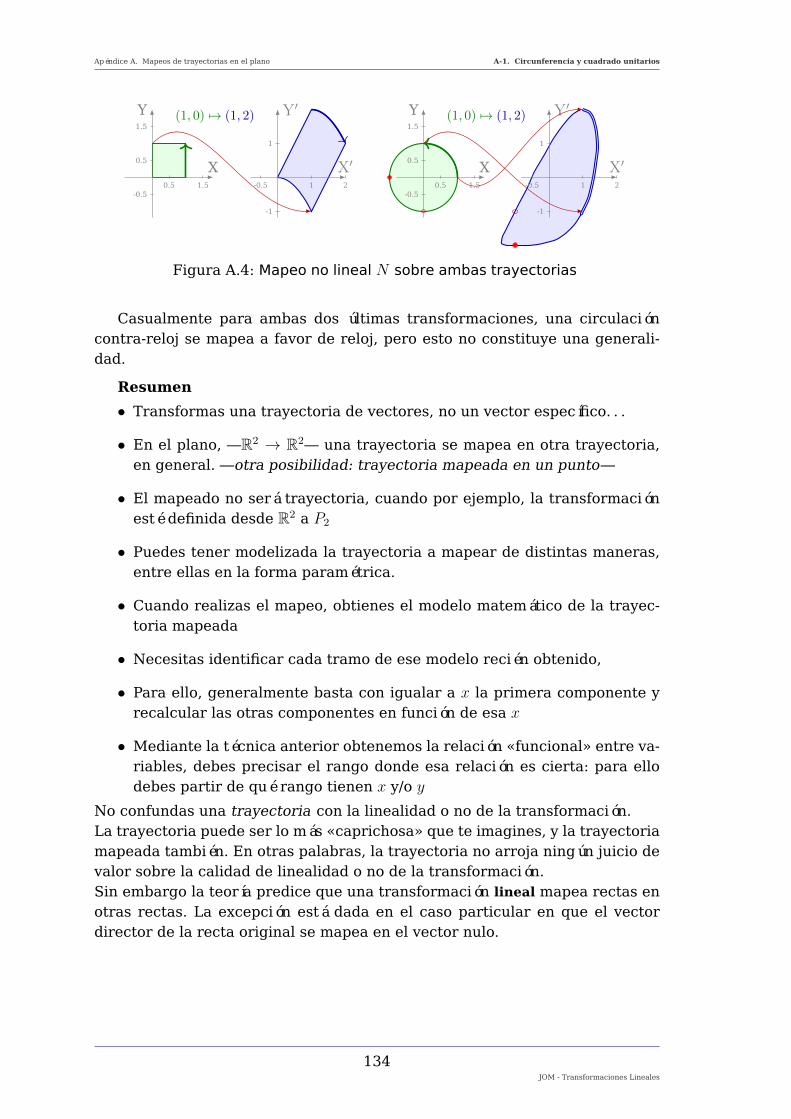
Apéndice A. Mapeos de trayectorias en el plano A-1. Circunferencia y cuadrado unitarios
0.5 1.5-0.5
0.5
1.5
Y
X-0.5 1 2
-1
1
Y′
X′
(1, 0) 7→ (1, 2)
0.5 1.5-0.5
0.5
1.5
Y
X
-1
1
-0.5 1 2
Y′
X′
(1, 0) 7→ (1, 2)
Figura A.4: Mapeo no lineal N sobre ambas trayectorias
Casualmente para ambas dos últimas transformaciones, una circulacióncontra-reloj se mapea a favor de reloj, pero esto no constituye una generali-dad.
Resumen
• Transformas una trayectoria de vectores, no un vector específico. . .
• En el plano, —R2 → R2— una trayectoria se mapea en otra trayectoria,en general. —otra posibilidad: trayectoria mapeada en un punto—
• El mapeado no será trayectoria, cuando por ejemplo, la transformaciónesté definida desde R2 a P2
• Puedes tener modelizada la trayectoria a mapear de distintas maneras,entre ellas en la forma paramétrica.
• Cuando realizas el mapeo, obtienes el modelo matemático de la trayec-toria mapeada
• Necesitas identificar cada tramo de ese modelo recién obtenido,
• Para ello, generalmente basta con igualar a x la primera componente yrecalcular las otras componentes en función de esa x
• Mediante la técnica anterior obtenemos la relación «funcional» entre va-riables, debes precisar el rango donde esa relación es cierta: para ellodebes partir de qué rango tienen x y/o y
No confundas una trayectoria con la linealidad o no de la transformación.La trayectoria puede ser lo más «caprichosa» que te imagines, y la trayectoriamapeada también. En otras palabras, la trayectoria no arroja ningún juicio devalor sobre la calidad de linealidad o no de la transformación.Sin embargo la teoría predice que una transformación lineal mapea rectas enotras rectas. La excepción está dada en el caso particular en que el vectordirector de la recta original se mapea en el vector nulo.
134JOM - Transformaciones Lineales
Apéndice B
Más sobre mapeos lineales
B-1.Ley dada mediante del mapeo de una base . . . . . . . . . . . . . 135
B-2.Núcleo e imagen de una TL . . . . . . . . . . . . . . . . . . . . . . 138
B-2.1. Imagen de una transformación lineal . . . . . . . . . . . . 139
B-2.2. Núcleo de una transformación lineal . . . . . . . . . . . . 140
B-3.Relaciones entre los sistemas lineales y las transformacioneslineales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 143
B-4.Traslaciones «matricializadas» . . . . . . . . . . . . . . . . . . . . 143
B-5.Guión de figura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 144
En este apéndice discutiremos contenidos que ayudarán a profundizar enlos mapeos lineales, y a que accedas a la idea de qué es lo que se conecta conestos temas, posteriormente en la carrera.
B-1. Ley dada mediante del mapeo de una base
Veamos si es posible caracterizar una transformación lineal a partir delconocimiento de los mapeados de una base cualquiera del dominio. Primeromediante un ejemplo y luego formalmente.
Ejemplo B.1. Una transformación lineal mapea los vectores (3, 2) 7→ (−2, 0) y(4, 1) 7→ (−1, 5). Halla la ley de transformación.pClaramente todo sucede en el plano: L : R2 7→ R2. Observa que los vecto-res B = { v1 = (3, 2), v2 = (4, 1) } forman una base para el dominio.La matriz asociada sería
[L ] = [L(e1) L(e2) ] =[e′1 e′2
]=
[e′11 e′12
e′21 e′22
]
donde e′i = (e′1i , e′2i) es el mapeo del vector ei de la base canónica.
135

Apéndice B. Más sobre mapeos lineales B-1. Ley dada mediante del mapeo de una base
No sabemos cómo afecta la transformación lineal L a la base canónica —eso es justamente lo que tenemos que averiguar— pero sí lo que L le hacea B.
Nuestra estrategia es tratar de escribir cada vector como combinaciónlineal de la base canónica y suponer un mapeo lineal, aplicando sus pro-piedades:
L((3, 2)
)= L
(3(1, 0) + 2(0, 1)
)= L
(3e1 + 2e2
)= 3e′1 + 2e′2 = (−2, 0) por linealidad
= 3(
(e′11, e′21))
+ 2(
(e′12, e′22))
= (−2, 0) (∗)
L((4, 1)
)= 4e′1 + 1e′2 = (2, 0) similarmente
= 4(
(e′11, e′21))
+ 1(
(e′12, e′22))
= (−1, 5) (∗)
Las ecuaciones marcadas (*) las puedes escribir. . .
3e′11 + 2e′12 = −2
3e′21 + 2e′22 = 0
4e′11 + 1e′12 = −1
4e′21 + 1e′22 = 5
Es un sistema de cuatro incógnitas, pero está desacoplado, de manera que
A)
3e′11 + 2e′12 = −2
4e′11 + 1e′12 = −1B)
3e′21 + 2e′22 = 0
4e′21 + 1e′22 = 5
Y como la matriz de los coeficientes es la misma para ambos casos, tam-bién podemos escribir[
3 2
4 1
] [e′11 e′21
e′12 e′22
]=
[−2 0
−1 5
]trasponiendo1
[e′11 e′12
e′21 e′22
] [3 4
2 1
]=
[−2 −1
0 5
]lo cual es[
L] [B]
=[B′]
desde lo cual es sencillo arribar a que la ley es L((x, y)
)=(− y , 2x− 3y
).
Nota que no hay ningún cambio de base involucrado.y
En la figura B.1 verás un pictograma de la situación.
Proposición B.1. Mediante los transformados de cualquier base conocida deun EV, puedes encontrar la única TL que cumpla con la ley de transformación.
1Ten en cuenta que (A ·B)> = B> ·A>
136JOM - Transformaciones Lineales
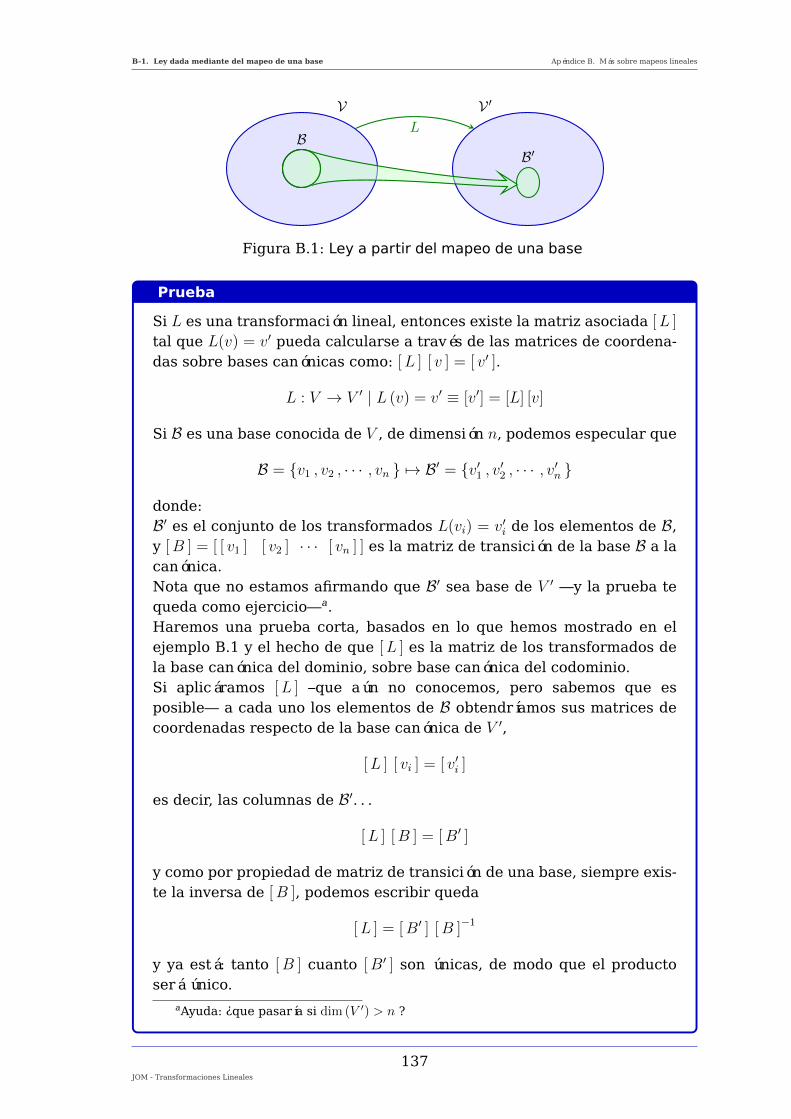
B-1. Ley dada mediante del mapeo de una base Apéndice B. Más sobre mapeos lineales
V V ′
BB′
L
Figura B.1: Ley a partir del mapeo de una base
Prueba
Si L es una transformación lineal, entonces existe la matriz asociada [L ]
tal que L(v) = v′ pueda calcularse a través de las matrices de coordena-das sobre bases canónicas como: [L ] [ v ] = [ v′ ].
L : V → V ′ | L (v) = v′ ≡ [v′] = [L] [v]
Si B es una base conocida de V , de dimensión n, podemos especular que
B = {v1 , v2 , · · · , vn } 7→ B′ = {v′1 , v′2 , · · · , v′n }
donde:B′ es el conjunto de los transformados L(vi) = v′i de los elementos de B,y [B ] = [ [ v1 ] [ v2 ] · · · [ vn ] ] es la matriz de transición de la base B a lacanónica.Nota que no estamos afirmando que B′ sea base de V ′ —y la prueba tequeda como ejercicio—a.Haremos una prueba corta, basados en lo que hemos mostrado en elejemplo B.1 y el hecho de que [L ] es la matriz de los transformados dela base canónica del dominio, sobre base canónica del codominio.Si aplicáramos [L ] –que aún no conocemos, pero sabemos que esposible— a cada uno los elementos de B obtendríamos sus matrices decoordenadas respecto de la base canónica de V ′,
[L ] [ vi ] = [ v′i ]
es decir, las columnas de B′. . .
[L ] [B ] = [B′ ]
y como por propiedad de matriz de transición de una base, siempre exis-te la inversa de [B ], podemos escribir queda
[L ] = [B′ ] [B ]−1
y ya está: tanto [B ] cuanto [B′ ] son únicas, de modo que el productoserá único.
aAyuda: ¿que pasaría si dim (V ′) > n ?
JOM - Transformaciones Lineales
137

Apéndice B. Más sobre mapeos lineales B-2. Núcleo e imagen de una TL
Podemos afirmar entonces que:
La matriz asociada a una TL dada mediante una baseB ⊂ V y sus transformados B′ ⊂ W se calcula como[B′] [B]−1.donde [B ] es la matriz de transición de la base B a la canónica
CV .
Ejemplo B.2. A través de una cierta transformación lineal U , la imagen de (2, 1)
es 2 + 3x− x2, y la imagen de (−5, 3) es x+ 2x2. Halla la ley de U .pDe acuerdo con el resultado de la proposición B.1, y teniendo en cuentaque las matrices involucradas son
[B ] =
[2 −5
1 3
][B ]′ =
2 0
3 1
−1 2
entonces la matriz asociada es [U ] = 111
6 10
8 17
−5 −1
, de donde la ley
U : R2 ⇒ P2 | U((a, b)
)=
6a+ 10b
11+
8a+ 17b
11λ− 5a+ b
11λ2
que es la ley solicitada.y
Nota que cuando tienes el resultado de la proposición, el cálculo es elegan-te y sencillo, sin embargo: evita quedarte con «la fórmula» ; ésta la calculamoscomo ejemplo de aplicación de conceptos con la esperanza de mostrarte un ca-mino que te servirá cuando debas encontrar relaciones en otro contexto.
B-2. Núcleo e imagen de una TL
Como habíamos definido que la Transformación –entre ellas la transformalineal— es una función entre espacios vectoriales V ⇒ V ′, podremos definiren el codominio, la imagen I como un subconjunto de V ′. En otras palabras:
138JOM - Transformaciones Lineales

B-2. Núcleo e imagen de una TL Apéndice B. Más sobre mapeos lineales
la imagen es el conjunto incluido en el espacio V ′ tal que sus elementos estánrelacionados con algún elemento de V , formalmente
I (L) = {v′ ∈ V ′ | ∃v ∈ V ∧ v′ = L (v)}
Y el núcleo de la TL como el conjunto del dominio que se mapea en el vectornulo
N (L) = {u ∈ V | L (u) = θV ′}
La figura B.2 muestra el pictograma de lo que estamos hablando
θ
V V ′
N
L
I
V V ′L
θ
Figura B.2: Núcleo (izquierda) e imagen (derecha) de una TL
B-2.1. Imagen de una transformación lineal
Veamos cómo calcular el conjunto imagen mediante algunos ejemplos sen-cillos:
Ejemplo B.3. Para la TL en el plano, dada por [T ] =
[1 0
2 0
], halla su imagen
p
la imagen del vector genérico es
[1 0
2 0
] [x
y
]=
[x
2x
], . . . que es el
subespacioI(T ) = {(x, 2x)} = {(x, y) | y = 2x}
o sea la recta y = 2x. Es decir que todo punto del plano se «proyecta» ver-ticalmente sobre y = 2x, sin importar su ordenada.y
Ejemplo B.4. Para la TL en el plano, dada por [M ] =
[1 3
2 4
], halla su imagen
pEstamos tratando de ver dónde se mapean todos los vectores del planodebido a la TL M . En este caso[
1 3
2 4
] [x
y
]=
[x+ 3y
2x+ 4y
]
JOM - Transformaciones Lineales
139
Apéndice B. Más sobre mapeos lineales B-2. Núcleo e imagen de una TL
si tomas x + 3y = u, como primera componente de v′, su segunda compo-nente será 2x+ 4y = x+ x+ 3y + y = x+ y + u,y como vemos, esta componente no está restringida, por tanto la imagenen este caso es I(M) = R2, es decir, todo el plano.y
El ejemplo B.4 nos permite concluir que en los casos [L] ∈ Rn×n, sidet ([L]) = 0, la imagen de L es todo el espacio codominio, y aún más: la trans-formación inversa quedará representada por la matriz asociada inversa.
La pregunta es ¿Cuándo sucede que la transformación lineal tiene comoimagen todo el codominio? Estamos preguntando si la TL es sobreyectiva.
En este caso la dimensión del dominio —dim(V) = n— no debería ser menorque la del codominio —dim(V ′) = m— En términos de las dimensiones de lamatriz asociada, [L ] ∈ Rm×n tendrá al menos la misma cantidad de columnasque de filas. La condición es necesaria, pero no suficiente.
Claramente puedes ver que el conjunto imagen de una transformación li-neal es un subespacio del espacio vectorial que actúa como codominio de laTL.
Para probar formalmente que el conjunto imagen de una transformaciónlineal es subespacio del codominio, puedes proceder de la manera que sigue:
Transforma un elemento genérico del dominio escrito como combinación linealde una base. Obtendrás una combinación lineal genérica de los transformadosde la base. . . que es la definición del conjunto generado por el conjunto de lostransformados de la base (en V ′), y por tanto un subespacio de V ′.
¿Qué pasaría si se diera que el transformado de cualquier base del dominiofuera base del codominio? —La pregunta apunta a la sobreyectividad o no dela TL—
B-2.2. Núcleo de una transformación lineal
Hemos dicho que el núcleo de la TL se define como todos los vectores de Vque tienen como imagen al vector nulo de V ′,
N (L) = {u ∈ V | θV ′ = L (u)}
en los ejemplos anteriores:
Ejemplo B.5. Para la TL en el plano, dada por [T ] =
[1 0
2 0
], halla su núcleo.
p
La imagen del vector genérico es
[1 0
2 0
] [x
y
]=
[x
2x
], . . . que si se la
140JOM - Transformaciones Lineales
B-2. Núcleo e imagen de una TL Apéndice B. Más sobre mapeos lineales
iguala al vector nulo es
[x
2x
]=
[0
0
], que se satisface sólo con x = 0. La
otra variable (y) puede ser cualquiera, por tanto
N (T ) = {(0, y)}
Lo puedes comprobar. . .
[1 0
2 0
] [0
y
]=
[0
0
]y
Nota que el núcleo de la transformación lineal es el espacio nulo de lamatriz asociada, ya que se obtiene del sistema [L ] [x ] = [ θ ]
Ejemplo B.6. Dada la TL en el plano, dada por [M ] =
[1 3
2 4
], halla su núcleo.
p
En este caso
[1 3
2 4
] [x
y
]=
[0
0
],
como la matriz asociada tiene inversa:[x
y
]=
[1 3
2 4
]−1 [0
0
]existe única solución x = y = 0, y por tanto
N (M) = {(0, 0)}
Donde el núcleo es el espacio trivial del vector nulo.En este caso, puedes hallar la matriz asociada a la transformación inversasimplemente invirtiendo M .y
Nota que siempre que se hable de núcleo e imagen, la notación es de con-juntos.
Nota asimismo que el núcleo abarca a todos los vectores normales al espa-cio generado por las filas de la matriz asociada —espacio fila—. Recuerda quela normalidad de los vectores la hemos definido mediante el producto escalarigual a cero.
Nota además que el núcleo nunca está vacío; [L ] [ v ] = [ θV ′ ] tiene al menosal vector nulo del dominio como solución: [L ] [ θV ] = [ θV ′ ] ya que θV ∈ V nece-sariamente, puesto que V es un espacio vectorial, asimismo, por propiedad detransformaciones lineales la imagen del vector nulo del dominio es el vectornulo del codominio. Como en el codominio también existe θV ′ ∈ V ′ por ser ésteun espacio vectorial, concluyes que tampoco el conjunto imagen es vacío.
Tanto el núcleo —«kernel» en inglés— cuanto el conjunto imagen son asu vez espacios vectoriales2 —y si sus dimensiones o permiten puedes definirbases para ellos—.
2Ya hemos probado que no son vacíos (condición de partida para los subespacios); portanto falta probar que la suma de dos elementos del núcleo también está en el núcleo, y queel escalado de un elemento del núcleo vive en el núcleo. Lo mismo para la imagen.
JOM - Transformaciones Lineales
141

Apéndice B. Más sobre mapeos lineales B-2. Núcleo e imagen de una TL
Desde el punto de vista de los sistemas lineales el término correspondientepara núcleo es el espacio nulo, —«null space» en inglés—
Podemos definir las dimensiones de la imagen y el núcleo
dim (I (L)) y dim (N (L))
como el rango y la nulidad de L respectivamente3
En transformaciones lineales entre espacios de dimensión finita, digamosL : V → V ′ donde dim (V ) = n < ∞ y dim (V ′) = m < ∞ —ergo [L] es dem × n—, el rango4 de [L] es numéricamente el rango de la transformaciónlineal L.
Otra particularidad es que
dim (I (L)) + dim (N (L)) = dim(V ) (B.1)
rango (L) + nulidad (L) = n
Y entonces es sencillo calcular primero el núcleo. Su dimensión será el rango,que con la anterior calcularás la nulidad. Si la nulidad no es cero, ya podemostener idea del conjunto imagen, que siempre es más complicado de calcular,aunque sabes que es el espacio columna de la matriz asociada.
Estos conceptos son importantes porque pueden establecer claramentecuándo una TL admite inversa, es decir, dada una L | L (u) = v, es impor-tante saber si existe una U | U (v) = u, y U se conoce normalmente comoL−1. La importancia está –por ejemplo– en lo que en ingeniería se llama esti-mación de estados: la habilidad para establecer con pocas mediciones de u ysu trasformado v, la transformación L. Si la estructura del problema denotaque la nulidad no es cero, entonces no hay unicidad entre v y su original sintransformar, porque la inversa no existe.
Básicamente una transformación lineal con nulidad cero es invertible, yeso quiere decir que si usamos esa transformación para codificar o encriptaralgo, podemos tener la transformación inversa y desencriptarlo.
Ejercicio B.1. sea la TL T : R4 → R3dada por [T ] =
4 1 −2 −3
2 1 1 −4
6 0 −9 9
a) decide si los vectores v1 = (0, 0, 6), v2 = (1, 3, 0), yv3 = (2, 4, 1), están en la imagen de T
b) decide si los vectores w1 = (3,−8, 2, 0), w2 = (0, 0, 0, 1), yw3 = (0,−4, 1, 0), están en el núcleo de T
c) halla el rango y la nulidad de T
3Rango: en inglés rank significa rango, como el de la matriz. En inglés range significaconjunto imagen y en oportunidades, codominio. Ambos vocablos se traducen ambiguamente,como rango. En este libro no usamos la palabra rango para nombrar conjuntos.
4Recuerda que el rango de una matriz es el número de columnas (o filas) linealmenteindependientes de la matriz, y este rango es la dimensión del conjunto imagen de la transfor-mación.
142JOM - Transformaciones Lineales
B-3. Relaciones entre los sistemas lineales y las transformaciones lineales Apéndice B. Más sobre mapeos lineales
Ejercicio B.2. Describe el núcleo de la transformación derivada entre espa-cios, por ejemplo P4 → P3 : D(p) = dp
dx= p′, p ∈ P4, p
′ ∈ P3
B-3. Relaciones entre los sistemas lineales y las trans-
formaciones lineales
Desde que hemos probado que una transformación lineal tiene la propie-dad de que puede proponerse [L ] · [ v ] = [ v′ ], y esta no es más que un sistemade ecuaciones lineales, podemos hacer comparaciones interesantes con el sis-tema A · x = b:
Por ejemplo: el núcleo de la transformación lineal es lo mismo que el nú-cleo, “kernel” o espacio nulo de la matriz asociada.
La imagen de una transformación lineal es el espaciocolumna de su matriz asociada, y el rango es su dimen-sión. Tanto el núcleo cuanto el conjunto imagen de unaTL son espacios. El núcleo es ortogonal al espacio filade la matriz asociada
B-4. Traslaciones «matricializadas»
Es claro que una transformación de traslación —por ejemploT((x, y)
)= (x + 1, y + 2) en R2— es no lineal y por tanto no podrás
hallar una matriz asociada. De todas maneras esta transformación es muyusada, así que vale la pena desarrollar una técnica para «matricializarla» .
En otras palabras, para la transformación no lineal (afín)
T : R2 → R2 | T ((x, y)) = (x+ x0 , y + y0)
puedes encontrar una matriz «asociada», y en ese aspecto parecería que pue-des verla como una entre dos «espacios» —que ya no serán R2— desde loscuales la transformación «se ve lineal» .
La idea es: hagamos que la transformada del vector v sea el vector v′ y quela relación sea
v′ = mv + v0
donde v0 es una constante y m es la matriz asociada a la parte lineal de la rela-ción. Parece hasta natural que hagamos un cambio de variables y escribamos
JOM - Transformaciones Lineales
143
Apéndice B. Más sobre mapeos lineales B-5. Guión de figura
la relación como [v′
1
]=
[m v0
θ 1
][v
1
]
v′ = m v
donde la relación se ve como si fuera lineal —nota (importante) que ya esta-mos fuera de la formalidad de los espacios vectoriales, solamente queremosaprovechar lo que sabemos del álgebra matricial—
Ejemplo B.7. Escribe la TNL T : R2 → R2 | T ((x, y)) = (x+ 1 , y + 2) en formamatricial.pPodemos proponer una matriz como 1 0 1
0 1 2
0 0 1
x
y
1
=
x+ 1
y + 2
1
Como si fuera una función que va del plano z = 1 a sí mismo. La expresiónde arriba tiene todo el aspecto de[
T ′]
[u] = [v]
donde la relación se ve lineal aunque no lo sea.y
En una entrada de apéndice posterior —Apéndice C-1—, hemos de comple-tar este abordaje, refiriéndonos a una roto-traslación.
B-5. Guión de figura
En algún momento de tu carrera trabajarás con software matemático comoMatlab —o sus contrapartes libres como Freemat, Octave, Maxima, Xcas—. Lafigura 3.4, en página 54, ha sido creada en el entorno Matlab, he aquí el guiónque la produce:
%rotaX muestra cómo dibujar una rotacionN = 30; %facetas (puedes cambiar)v = [1.2;1.2;0]; a = pi/N/2; s = sin(a); c = cos(a);z = [0;0;0]; R = [1 0 0;0 c -s;0 s c];fig=figure; V = zeros(3,N+1); V(:,1) = v;
for k=2:N+1 %genera vectores rotados
144JOM - Transformaciones Lineales
B-5. Guión de figura Apéndice B. Más sobre mapeos lineales
V(:,k) = R*V(:,k-1); E = [z V(:,k-1:k)];x = abs(1-0.5*(2*(k-2)/(N-1)-1)^2);
patch(E(1,:),E(2,:),E(3,:),[0 x 0],’FaceAlpha’,0.8, %’EdgeAlpha’,0);
end
gr = .9*[1 1 1]; mr = [128 64 64]/256;set(fig,’color’,gr,’Name’,’Utilice ícono ’’Rotate3D’’’);set(gca,’Zcolor’,gr,’Ycolor’,gr,’Xcolor’,gr,’XDir’,%
’reverse’,’YDir’,’reverse’)text(0,0,2.1,’{\it{\bfZ}}’); %Nombres de ejestext(0,2.1,0,’{\it{\bfY}}’); text(2.1,0,0,’{\it{\bfX}}’);
mo = [0 0 0 0 0]; mm = [0 1 1 0 0]; md = [0 0 1 1 0];patch(2*mm,2*mo,2*md,.7*[1 1 1],’FaceAlpha’,0.5,’EdgeAlpha’,0);patch(2*md,2*mm,2*mo,[.9 .9 .8],’FaceAlpha’,0.5,’EdgeAlpha’,0);patch(2*mo,2*md,2*mm,.6*[1 1 1],’FaceAlpha’,0.5,’EdgeAlpha’,0);
v = [zeros(3,1) V(:,ceil(N/3))];line(v(1,:),v(2,:),v(3,:),’color’,[.2 .2 1],’LineWidth’,2);line(V(1,:),V(2,:),V(3,:),’color’,[0 .8 0]);view(3); axis image
a = v(4); b = v(5); c = v(6); h = 1.8; p = 0.05;line(a*(mo+1),md*b,mm*c,’Color’,mr)line(a*(mo),md*b,mm*c,’Color’,mr)line([0 a NaN 0 a NaN 0 a NaN],[b b NaN b b NaN 0 0 NaN],%
[0 0 NaN c c NaN c c NaN],’Color’,mr)
H = [h h 2 h]; P = [0 p 0 0];M = [0 0 0 0];patch(H,P,M,’k’,’FaceAlpha’,1,’EdgeAlpha’,0)patch(H,M,P,’k’,’FaceAlpha’,1,’EdgeAlpha’,0)patch(P,H,M,’k’,’FaceAlpha’,1,’EdgeAlpha’,0)patch(M,H,P,’k’,’FaceAlpha’,1,’EdgeAlpha’,0)patch(M,P,H,’k’,’FaceAlpha’,1,’EdgeAlpha’,0)patch(P,M,H,’k’,’FaceAlpha’,1,’EdgeAlpha’,0)%FIN rotax.m
JOM - Transformaciones Lineales
145

Apéndice B. Más sobre mapeos lineales B-5. Guión de figura
146JOM - Transformaciones Lineales
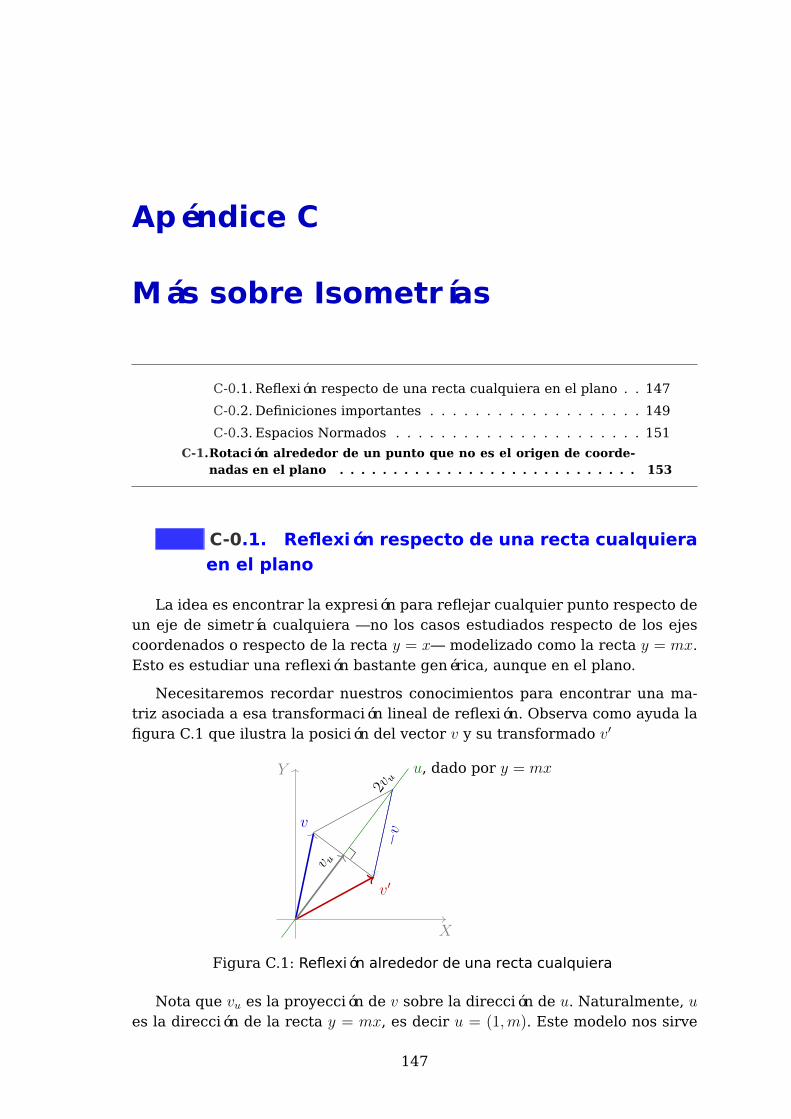
Apéndice C
Más sobre Isometrías
C-0.1. Reflexión respecto de una recta cualquiera en el plano . . 147
C-0.2. Definiciones importantes . . . . . . . . . . . . . . . . . . . 149
C-0.3. Espacios Normados . . . . . . . . . . . . . . . . . . . . . . 151
C-1.Rotación alrededor de un punto que no es el origen de coorde-nadas en el plano . . . . . . . . . . . . . . . . . . . . . . . . . . . . 153
C-0.1. Reflexión respecto de una recta cualquiera
en el plano
La idea es encontrar la expresión para reflejar cualquier punto respecto deun eje de simetría cualquiera —no los casos estudiados respecto de los ejescoordenados o respecto de la recta y = x— modelizado como la recta y = mx.Esto es estudiar una reflexión bastante genérica, aunque en el plano.
Necesitaremos recordar nuestros conocimientos para encontrar una ma-triz asociada a esa transformación lineal de reflexión. Observa como ayuda lafigura C.1 que ilustra la posición del vector v y su transformado v′
X
Y u, dado por y = mx
v
v′
v u
2vu
−v
Figura C.1: Reflexión alrededor de una recta cualquiera
Nota que vu es la proyección de v sobre la dirección de u. Naturalmente, ues la dirección de la recta y = mx, es decir u = (1,m). Este modelo nos sirve
147

Apéndice C. Más sobre Isometrías
excepto cuando la recta se transforma en el eje Y, donde lo cambiaríamos poru = (0, 1).
Llamemos Ru a la TL que mapea un vector v en su reflexión a lo largo de ladirección u, y [Ru] a la matriz asociada. Matricialmente
[v′] = [Ru] [v]
claramente se ve en la figura C.1 la relación
v′ = 2vu − v
Podemos pensar que hay dos transformaciones lineales:
– la primera, Pu, que mapea v en 2vu, dos proyecciones sobre el eje u, y
– la segunda,Op, que mapea v en su opuesto −v, simbólicamente. . .
Pu : R2 → R2 | Pu(v) = 2vu
⇓[v′′] = [P ] [v]
y. . .Op : R2 → R2 | Op(v) = −v
⇓[v′′′] = [Q] [v]
Por lo que la matriz asociada [Ru] debe ser1
[Ru] = [P ] + [Q]
La matriz Q es simplemente −I =
[−1 0
0 −1
].
El problema es entonces encontrar la matriz asociada [P ] a la transforma-ción Pu. Como siempre, mapearemos la base canónica proyectando sobre u.
El vector proyección de v sobre u es colineal con u, y el módulo es simplementeel producto escalar de v contra un versor de u
vu =v · u|u|
u
|u|=v · uu · u
u
y aplicado al primer vector v = e1 = (1, 0)
Pu (e1) = 2(1, 0) · (1,m)
1 +m2(1,m) =
(2
1 +m2,
2m
1 +m2
)con lo que, y del mismo modo tenemos que
[Pu (e1)] =
2
1 +m2
2m
1 +m2
y [Pu (e2)] =
2m
1 +m2
2m2
1 +m2
1Recuerda —en las secciones 2-4.1 y 2-4.2— que la transformación suma de dos transfor-
maciones lineales, o la de una TL escalada, es también lineal.
148JOM - Transformaciones Lineales

Apéndice C. Más sobre Isometrías
por lo que la matriz [P ] será
[P ] =2
1 +m2
[1 m
m m2
]
Y la matriz buscada es
[Ru] =2
1 +m2
[1 m
m m2
]+
[−1 0
0 −1
]
=1
1 +m2
[1−m2 2m
2m m2 − 1
]Ejercicio C.1. encuentra la matriz asociada a la reflexión sobre la direc-
ción dada por y = x. (Comprueba el resultado con un ejerciciosimilar ya hecho)
Ejercicio C.2. encuentra la matriz asociada a la reflexión sobre la direccióndada por y = 2x
C-0.2. Definiciones importantes
Un isomorfismo es una transformación biyectiva entre espacios de la mis-ma dimensión. Dos conjuntos son isomorfos si se puede definir entre ellos unatransformación uno a uno, es decir: cada elemento de un conjunto está rela-cionado con uno y solo un elemento del otro conjunto y viceversa.
Como lo que sucede en una transformación inversa: si L : V → V ′ | L (v) = v′),su transformación inversa, tal que
S : V ′ → V | S (L (v)) = v
Hagamos S = L−1.
v v′
V V ′
L(v) = v′
L−1(v′) = v
L−1 (L(v)) = v
L
L
L−1
Figura C.2: Función inversa
En forma general, un morfismo f es una transformación de (V ,+,K, ·) en(V ′,⊕,K,�) tal que
f (u+ v) = f (u)⊕ f (v) (C.1)
f (k · v) = k � f (v)
JOM - Transformaciones Lineales
149
Apéndice C. Más sobre Isometrías
para todos u, v ∈ V y para todo k ∈ K
Si f , además de la (C.1) fuera inyectiva2 se llamará monomorfismo.
Si f además de la C.1 es sobreyectiva3 se llamará epimorfismo.
Si f además de la C.1 es biyectiva4 se llamará isomorfismo.
Si f es un isomorfismo en el mismo espacio (f : V → V ) se llama auto-morfismo —y esos son los casos que estudiamos en este libro, es decir queestudiamos los automorfismos isométricos—.
Los isomorfismos no pueden darse entre espacios de diferente dimensión fi-nita: supón que dim(V ) < dim(V ′), no podrá ser sobreyectiva, porque cadaelemento de V estará —lineal— apareado a lo sumo con uno distinto de V ′,es decir: la dimensión de la imagen será como máximo la de V, luego no serásobreyectiva. . . por tanto tampoco biyectiva, y por ello no tendrá inversa, y fi-nalmente no será un isomorfismo. Si supones la posibilidad dim(V ) > dim(V ′)
no hay forma de que sea inyectiva. En otras palabras, en alguno de ellos «vana sobrar elementos» .
Por eso puedes hablar de complejos y vectores posición en el plano comosi fueran la misma cosa, porque son isomorfos: para cada complejo existe unsolo vector posición; y viceversa, para cada vector posición en el plano existeun único complejo. Has de notar que los números complejos son escalares(5) y los vectores del plano son vectores —puede formar el espacio (R2,+,R, ·)de dimensión 2—.
Los elementos vector posición o punto del espacio 2-dimensional, y los números complejos vienen de es-tructuras diferentes; sólo comparten el hecho de serisomorfos.
2Inyectiva: un elemento de la imagen tiene una sola pre-imagen, o: distintos elementos deldominio tienen distintas imágenes.
3Sobreyectiva : todos los elementos del codominio tienen preimagen, o : el conjunto de lasimágenes es igual al conjunto del codominio
4Biyectiva : si es a la vez inyectiva y sobreyectiva, o sea hay una relación uno a uno entrelos elementos del dominio y el codominio, y por lo tanto «visto desde arriba» ambos conjuntosson intercambiables
5Aunque, —como en el caso de los reales pueden pensarse como vectores haciendo(R,+,R, ·) de dimensión 1— pueden ser vectores de un espacio vectorial al formar por ejemploel espacio (C,+,R, ·) de dimensión 2, así como el espacio (C,+,C, ·) de dimensión 1
150JOM - Transformaciones Lineales

Apéndice C. Más sobre Isometrías
C-0.3. Espacios Normados
Las isometrías se refieren a espacios normados, es decir espacios vectoria-les donde se puede definir una —al menos una— norma (concepto muy asocia-do a distancia). La norma α de un vector v se nota ‖v‖α. Las normas las puedespensar como funciones que tienen condiciones adicionales que cumplir.
N1 : ‖v‖α ≥ 0 es no negativa
N2 : ‖v‖α = 0⇔ v = θ nula, solo el vector nulo
N3 : ‖k · v‖α = |k| · ‖v‖α escalamiento
N4 : ‖u+ v‖α ≤ ‖u‖α + ‖v‖α desigualdad triangular
(C.2)
Muchas veces las normas están asociadas a los productos escalares definidosen un espacio vectorial.
Prueba
en {Rn,+,R, · } el producto escalar más común es: u · v =∑ni=1 ui · vi, exactamente el que conoces.
El resultado es un número real (ley de composición externa).
Prueba
en {Cn,+,C, · } el producto escalar más común es: u · v =∑ni=1 ui · v∗i , donde v∗ es el conjugado de v, en este caso no se
cumple la conmutatividad, sino que (u · v) = (v · u)∗.El resultado es un número complejo (ley de composición in-terna).
La norma más conocida para espacios tipo Rn, es la norma 2 . . .
‖v‖2 =√v · v producto escalar (C.3a)
=√〈v, v〉 producto interno (C.3b)
=√v21 + v22 + · · ·+ v2n distancia (componentes) (C.3c)
=
√[v]> · [v] matriz de coordenadas (C.3d)
. . . que en el caso Rn es el módulo al que estamos acostumbrados
‖v‖2 = |v| en Rn módulo (C.4)
Como ejemplo se puede tomar esta otra norma para Rn
‖v‖∞ = maxi
(|vi|) (C.5)
donde vi es la i-ésima componente de v. Y el vector (1,−3, 2) tiene norma infi-nito al número 3.
JOM - Transformaciones Lineales
151

Apéndice C. Más sobre Isometrías
Ejercicio C.3. Prueba que ‖v‖∞ = maxi (|vi|) es realmente una norma. Estoes pedir que se verifiquen las ( (C.2)).
Para espacios de matrices, se suele usar las mismas normas anteriores,pero inducidas.
Por ejemplo: ‖[M ]‖2 es la norma dos inducida —en el espacio Rm×n—, y sela calcula mediante el máximo bajo la misma norma que «le produce» a unvector compatible de norma dos unitaria —del espacio Rn— .
[M ] [x ] = y ⇒ ‖[M ]‖2 = max‖x‖2=1
{ ‖y‖2 }
En otras palabras: —para el caso de la norma 2 y el espacio de las matricesde 2 × 2— se hallan los vectores mapeados de la circunferencia unitaria, y seescoge como medida, la del mapeado de mayor norma dos.
Ejercicio C.4. Prueba que la norma 2 inducida para la matriz A =
[1 2
2 1
]es ‖A‖2 = 3.
Ayuda: v =
[cosα
senα
]es de norma 2 unitaria,
luego v′ = Av, y |v′| =√
5 + 4 sen 2α
la derivada d|v′|dα
es nula en α1 = π/4 y α2 = 3π/4 (debes tomarel máximo, no el mínimo)
Ejercicio C.5. Comprueba que la norma infinito inducida para la matriz
A =
[1 2
2 1
]es ‖A‖∞ = 3.
Ayuda: como todas las entradas de la matriz son positivas, el
vector «más grande» es el v =
[1
1
]. . .
Es más: puedes probar que para cualquier matriz, la normainfinito es la mayor de las sumas de los valores absolutos delas columnas
El boceto norma-inducida.ggb ilustra los dos últimos problemas para di-ferentes matrices, si te interesa puedes pedírmelo por correo.
Para el espacio de las funciones reales y continuas en el intervalo [0, 1] lanorma más popular es ∫ 1
0
|f(t)| dt
Hemos visto que a cualquier espacio vectorial se lo puede dotar de una norma.
Todas las normas definibles para un espacio vectorial son equivalentes:
‖v‖X = k0 ‖v‖Y donde k0 es una constante fija
152JOM - Transformaciones Lineales
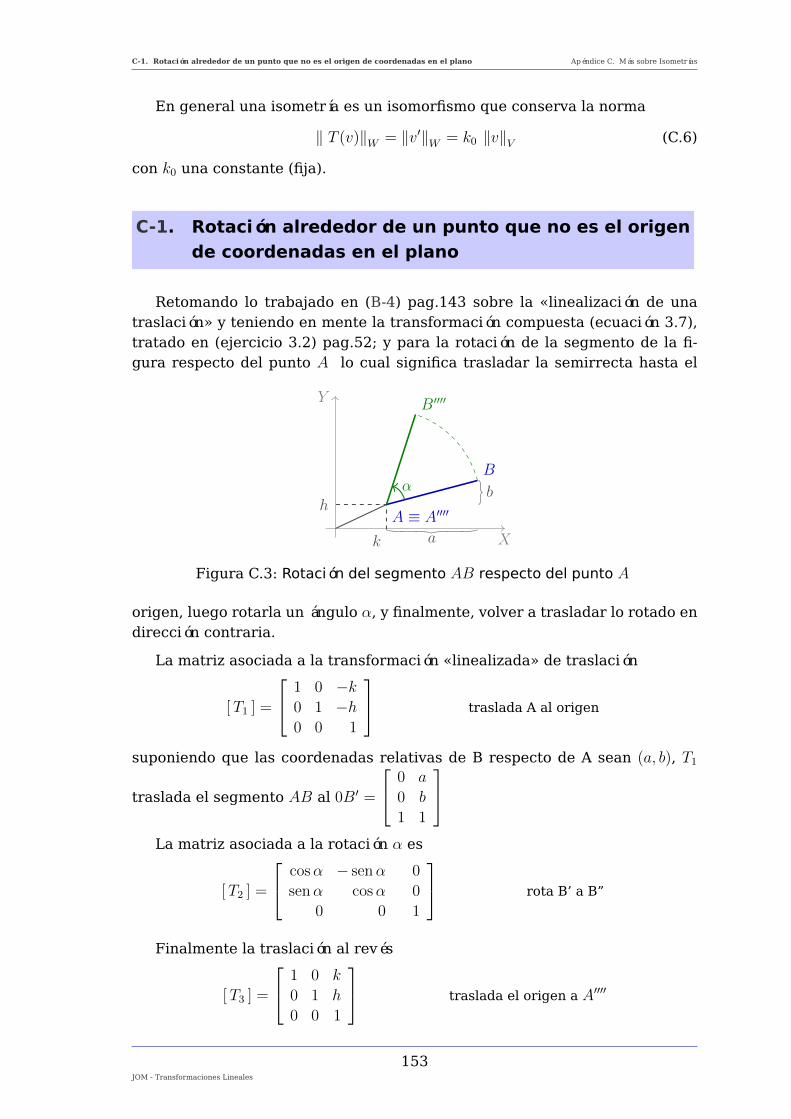
C-1. Rotación alrededor de un punto que no es el origen de coordenadas en el plano Apéndice C. Más sobre Isometrías
En general una isometría es un isomorfismo que conserva la norma
‖ T (v)‖W = ‖v′‖W = k0 ‖v‖V (C.6)
con k0 una constante (fija).
C-1. Rotación alrededor de un punto que no es el origen
de coordenadas en el plano
Retomando lo trabajado en (B-4) pag.143 sobre la «linealización de unatraslación» y teniendo en mente la transformación compuesta (ecuación 3.7),tratado en (ejercicio 3.2) pag.52; y para la rotación de la segmento de la fi-gura respecto del punto A lo cual significa trasladar la semirrecta hasta el
X
Y
a
b
k
hA ≡ A′′′′
B
B′′′′
α
Figura C.3: Rotación del segmento AB respecto del punto A
origen, luego rotarla un ángulo α, y finalmente, volver a trasladar lo rotado endirección contraria.
La matriz asociada a la transformación «linealizada» de traslación
[T1 ] =
1 0 −k0 1 −h0 0 1
traslada A al origen
suponiendo que las coordenadas relativas de B respecto de A sean (a, b), T1
traslada el segmento AB al 0B′ =
0 a
0 b
1 1
La matriz asociada a la rotación α es
[T2 ] =
cosα − senα 0
senα cosα 0
0 0 1
rota B’ a B”
Finalmente la traslación al revés
[T3 ] =
1 0 k
0 1 h
0 0 1
traslada el origen a A′′′′
JOM - Transformaciones Lineales
153

Apéndice C. Más sobre Isometrías C-1. Rotación alrededor de un punto que no es el origen de coordenadas en el plano
Entonces la transformación «linealizada» que logra nuestro cometido es
[T ] = [T3] [T2] [T1]
=
1 0 k
0 1 h
0 0 1
cosα − senα 0
senα cosα 0
0 0 1
1 0 −k0 1 −h0 0 1
=
cosα − senα k (1− cosα) + h senα
senα cosα h (1− cosα)− k senα
0 0 1
. . . aplicado [T ] al segmento AB. . .
=
cosα − senα k (1− cosα) + h senα
senα cosα h (1− cosα)− k senα
0 0 1
k k + a
h h+ b
1 1
=
k a cosα− b senα + k
h a senα + b cosα + h
1 1
o aplicando [T ] a las diferencias
[T ]
a
b
0
=
a cosα− b senα
a senα + b cosα
0
= AB′′′′
naturalmente, T (AB) y AB tienen el mismo módulo. Concretando, la transfor-mación T que hace girar todas las cosas un ángulo α, a partir del punto A
es
T : R2 → R2 |
T(
(x, y))
=(k + (x− k) cosα + (h− y) senα ,
h+ (x− h) senα + (y − h) cosα)
. . . como puede comprobarse luego de hacer [T ]
xy1
, y eliminar la tercera
—ficticia— componente.
154JOM - Transformaciones Lineales
Apéndice D
Mas sobre autovalores yautovectores
D-1.Teorema de Cayley-Hamilton . . . . . . . . . . . . . . . . . . . . . 155
D-1.1.Polinomio Mínimo . . . . . . . . . . . . . . . . . . . . . . . 156
D-1.2.Prueba del teorema de Cayley-Hamilton . . . . . . . . . . 157
D-2.Matrices relacionadas y sus pares autovalor-autovector . . . . . 158
D-2.1.Escaladas . . . . . . . . . . . . . . . . . . . . . . . . . . . . 158
D-2.2. Inversas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 159
D-2.3.Producto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 160
D-2.4.Polinomio característico de matrices de 2× 2 y 3× 3 . . . 161
D-2.4.1.Uso de otras variables . . . . . . . . . . . . . . . . 162
D-3.Método de Newton-Raphson (Raíces) . . . . . . . . . . . . . . . . 163
D-3.0.2.Aplicación a matrices simétricas de 3x3 . . . . . . 166
D-3.0.3.Aplicación a matrices NO simétricas de 3x3 . . . 168
Tratamos algunas demostraciones interesantes, y el teorema de Cayley-Hamilton, muy usado en la teoría de control de sistemas dinámicos.
D-1. Teorema de Cayley-Hamilton
El TCH es fundamental, y dice que
una matriz satisface su propio polinomio característico.
155

Apéndice D. Mas sobre autovalores y autovectores D-1. Teorema de Cayley-Hamilton
Podemos comprobarlo con los ejemplos que hemos desarrollado, en particular
cuando A =
[1 2
2 1
], cuyo polinomio característico es πA(λ) = |λI − A| =
λ2 − 2λ− 3, entonces el teorema se aplica a A en la forma:
πA (A) = A2 − 2A− 3I
=
[1 2
2 1
]2− 2
[1 2
2 1
]−[
3 0
0 3
]=
[5 4
4 5
]−[
2 4
4 2
]−[
3 0
0 3
]=
[0 0
0 0
]= θ
la matriz nula. Lo que hemos hecho ha sido reemplazar el escalar λ por lamatriz A, y recordando que A0 = I es la matriz identidad.
Este resultado tiene diferentes aplicaciones en la ingeniería.
El polinomio característico se dice que es anulador —ya que el resultadoes la matriz nula—. Pero en ocasiones no es el único anulador. Un polinomioanulador es el que cumple con la condición PA (A) = θ.
D-1.1. Polinomio Mínimo
El polinomio anulador de menor grado se llama polinomio mínimo y sedenota
pA (λ) = θ
Este es otro resultado que también se usa en ingeniería. Cobrará sentido comoapéndice del próximo capítulo, cuando no puedas diagonalizar una matriz, yte conformas con dejarla «casi» diagonal, lo que se llama la forma canónicade Jordan.
Ejemplo D.1. Para la matriz A =
7 −16 −8
−16 7 8
−8 8 −5
del ejemplo 4.11, hemos
calculado que. . .p. . . el polinomio característico es πA(λ) = (λ+9)2(λ−27), y el TCH asegura
156JOM - Transformaciones Lineales

D-1. Teorema de Cayley-Hamilton Apéndice D. Mas sobre autovalores y autovectores
que
πA(A) = (A+ 9I)2(A− 27I)
=
16 −16 −8
−16 16 8
−8 8 4
2
·
−20 −16 −8
−16 −20 8
−8 8 −32
=1
144
4 −4 −2
−4 4 2
−2 2 1
· −20 −16 −8
−16 −20 8
−8 8 −32
=
0 0 0
0 0 0
0 0 0
mientras que el polinomio mínimo es
pA(A) = (A+ 9I)(A− 27I) = θ
como lo puedes comprobar.Aclaración: Este es un caso donde la matriz —como verás más adelante—es diagonalizable, estamos ejemplificando únicamente la existencia del po-linomio mínimo distinto al polinomio característico.y
¿Cuándo puedes asegurar que el pA(λ) = πA(λ) polinomio mínimo es tam-bién el característico.
D-1.2. Prueba del teorema de Cayley-Hamilton
Lo haremos para una matriz de n = 4, pero el resultado puede generalizar-se para cualquier n.
Recuerda que
πA(x) = x4 + a3x3 + a2x
2 + a1x+ a0
para una raíz cualquiera x = λ tenemos que
πA(λ) = 0
A · v = λv
A2 · v = A · A · v = Aλv = λA · v = λ2v
A3 · v = A · A2 · v = Aλ2v = λ3v
A4 · v = A · A3 · v = Aλ3v = λ4v
Luego...
πA(A) · v = (A4 + a3A3 + a2A
2 + a1A+ a0I) · v= A4 · v + a3A
3 · v + a2A2 · v + a1A · v + a0I · v
JOM - Transformaciones Lineales
157
Apéndice D. Mas sobre autovalores y autovectores D-2. Matrices relacionadas y sus pares autovalor-autovector
por lo visto arriba...
= λ4 · v + a3λ3 · v + a2λ
2 · v + a1λ · v + a0I · v= (λ4 + a3λ
3 + a2λ2 + a1λ+ a0I) · v
= πA(λ) · v= 0 · v= θ
Entonces, en general
Si πA(x) =∑n
k=0 ak xk, an = 1 es el polinomio caracte-
rístico de una matriz A de n× n, y λ es un autovalor deA, entoncesπA(λ) =
∑nk=0 ak λ
k = 0 y ademásπA(A) =
∑nk=0 ak A
k = θ
D-2. Matrices relacionadas y sus pares autovalor-
autovector
D-2.1. Escaladas
Hemos de probar en forma genérica y completa la relación entre los paresautovalor-autovector de una matriz A y de su matriz escalada B = kA, k 6= 0.
Lema D.1. Sea A una matriz con un par autovalor- autovector(λ, v); el co-
rrespondiente de B = kA será(kλ, v
), provisto que k 6= 0.
Prueba
Supongamos por ahora que el par a-a para B = kA fuera (µ,w), entoncesdebe darse que
Bw = µw
158JOM - Transformaciones Lineales

D-2. Matrices relacionadas y sus pares autovalor-autovector Apéndice D. Mas sobre autovalores y autovectores
, es decir —y teniendo en cuenta que k 6= 0—
θ = (µI−B)w =(kµ
kI− kA
)w
= k(µk
I− A)w = θ
pero como para A se cumple (λ, v), la última es
k (λI− A) v = θ
recogemos naturalmente que —ten en cuenta que k no es cero, ni w ni vson el vector nulo— debe ser w = v y µ = kλ, y ya está.
D-2.2. Inversas
Lema D.2. Una matriz invertible no puede tener autovalor cero.
Prueba
Supongamos que una matriz tiene un autovalor cero, asociado a un au-tovector v, por propiedad de espacio vectorial el producto 0v es el vectornulo
Av = λv = 0v = θ
en definitiva para ese par se cumple queda
Av = θ
, admitamos ahora que existe la inversa de A
A−1Av = A−1θ propiedad producto matricial
= θ = v absurdo
el sostener que A en esas condiciones admite inversa, requiere el impo-sible de que el autovector asociado sea nulo, con lo cual A no admiteinversa, y ya está.
Lema D.3. Sea A una matriz invertible, si un par autovalor- autovector de Aes(λ, v), el correspondiente de A−1 será
(λ−1, v
).
Prueba
Supongamos A invertible. El contra-recíproco del lema anterior nos per-mite afirmar que λ 6= 0 —en la lógica, p ⇒ q es equivalente a su contra-
JOM - Transformaciones Lineales
159

Apéndice D. Mas sobre autovalores y autovectores D-2. Matrices relacionadas y sus pares autovalor-autovector
recíproco ¬q ⇒ ¬p— entonces
λ−1v = λ−1A−1Av matriz identidad
= λ−1A−1λv asociatividad y Av = λv
= A−1v propiedad de las matrices
la primera y la última escritas en el «modo normal» hacen
A−1v = λ−1v
recogemos naturalmente que el par a-a de la inversa es (λ−1, v) y ya está.
D-2.3. Producto
Hemos visto que la composición de dos transformaciones lineales es otratransformación lineal, y su matriz asociada es el producto de las matricesasociadas. Para la composición U1 = A
(B(v)
)es [U1 ] = [A ] [B ]; mientras que
para la composición U2 = B(A(v)
)resulta [U2 ] = [B ] [A ].
Lema D.4. AB y BA comparten los autovalores.
Prueba
Supongamos que existen AB y BA, lo cual significa que ambas son cua-dradas y de la misma dimensión. Supongamos que una de ellas —A— esinvertible. De esta manera el polinomio
|λI − AB| = |λI − A−1(AB)A| por similaridad, A es invertible
= |λI −BA| asociatividad producto matrices
Como ambas tienen el mismo polinomio, comparten los autovectores, yya está.
Cuando ambas matrices son singulares —no son invertibles— también seda que los autovalores de AB son los mismos que los de BA, pero la pruebarequiere alguna habilidad que escapa a nuestros objetivos.
En cuanto a los autovectores, si supusiéramos que el producto AB poseeel par a-a
(λ, v), entonces BA posee el par a-a
(λ,A−1v
). Veamos porqué:
por similaridad, —suponiendo que existe A−1— AB y BA comparten el au-tovalor λ; y además, como hemos visto en la ec.(4.11), si Mv = λv entoncesC−1MC(C−1v) = λC−1v, que en este caso M hace el rol de AB y C el rol de A:
AB :(λ, v)⇒ A−1ABA = BA :
(λ,A−1v
)160
JOM - Transformaciones Lineales

D-2. Matrices relacionadas y sus pares autovalor-autovector Apéndice D. Mas sobre autovalores y autovectores
D-2.4. Polinomio característico de matrices de 2×2 y 3× 3
Necesitaremos una definición preliminar: la traza de A es la suma de loselementos de la diagonal, si A = (aij),
Tr (A) =n∑i=1
aii , por ejemplo Tr
([1 9
2 5
])= 1 + 5 = 6
demás está decir que |A| = det (A)
Matrices de 2× 2 πA (λ) = λ2 − Tr (A) λ+ |A|
Prueba
Sea a matriz A =
[a11 a12a21 a22
], sabiendo que el determinante y la traza de
A se calculan como
|A| = a11a22 − a12a21 (D.1)
Tr(A) = a11 + a22 (D.2)
formemos el polinomio característico:
πA(λ) =
∣∣∣∣[ λ− a11 −a12−a21 λ− a22
]∣∣∣∣= (λ− a11)(λ− a22)− a12a21= λ2 − (a22 + a11)λ+ a11a22 − a12a21= λ2 − Tr (A) + |A|
y ya está.
Matrices de 3× 3 πA (λ) = λ3 − Tr (A) λ2 +3∑i=1
|Aii| λ− |A|
Prueba
Recordemos que |Aij| es el determinante del menor que queda despuésde retirar la fila i y la columna j de la matriz A.
Sea a matriz A =
a11 a12 a13a21 a22 a23a31 a32 a33
, sabiendo que el determinante y la traza
JOM - Transformaciones Lineales
161

Apéndice D. Mas sobre autovalores y autovectores D-2. Matrices relacionadas y sus pares autovalor-autovector
de A se calculan como
|A| = a31|A31| − a32|A32|+ a33|A33| (D.3)
Tr(A) = a11 + a22 + a33 (D.4)
|A11| = a22a33 − a23a32|A22| = a11a33 − a13a31|A33| = a11a22 − a12a21
formemos el polinomio característico:
πA(λ) =
∣∣∣∣∣∣ λ− a11 −a12 −a13
−a21 λ− a22 −a23−a31 −a32 λ− a33
∣∣∣∣∣∣= −a31
∣∣∣∣[ −a12 −a13λ− a22 −a23
]∣∣∣∣+ a32
∣∣∣∣[ λ− a11 −a13−a21 −a23
]∣∣∣∣+ (λ− a33)
∣∣∣∣[ λ− a11 −a12−a21 λ− a22
]∣∣∣∣= −a31 (|A|31 + a13λ) + a32 (|A|32 − a23λ) +
+ (λ− a33)(|A33| − (a11 + a22)λ+ λ2
)= −a31|A|31 − a13a31λ+ a32|A|32 − a23a32λ+
+ |A33|λ− (a11 + a22)λ2 + λ3 − a33|A33|+ a33(a11 + a22)λ− a33λ2
= λ3 − Tr(A)λ2 +3∑i=1
|Aii|λ− |A|
y ya está.
D-2.4.1. Uso de otras variables
En la carrera de ingeniería, se usa a menudo el polinomio característico deuna matriz cuadrada, con una notación diferente, por ejemplo
πA (s) = s2 − 4s+ 4 Transformada de Laplace o de Fourier L|FπA (z) = z2 − 4z + 4 Transformada Zeta Z
donde s = σ + jω y z = R(z) + jI(z) son variables complejas. Las definiciones:
L (f(t)) =
∫ ∞0−
e−s tf(t)dt T. Laplace unilateral
L (f(t)) =
∫ ∞−∞
e−s tf(t)dt T. Laplace bilateral
162JOM - Transformaciones Lineales

D-3. Método de Newton-Raphson (Raíces) Apéndice D. Mas sobre autovalores y autovectores
La transformada de Fourier es más estricta:
F (f(t)) =
∫ ∞−∞
e−jω tf(t)dt T. Fourier
Ambas anteriores son para funciones de tiempo continuo. Finalmente las Zeta,que son para funciones de tiempo discreto.
Z (f(t)) =∞∑0
f(nT )z−n T. Zeta unilateral
Z (f(t)) =∞∑−∞
f(nT )z−n T. Zeta bilateral
Las transformadas te ayudan a efectuar cálculos complejos con funcionesen el tiempo mediante cálculos equivalentes más simples en la frecuencia. Esuna operación de ida —f(t o kT ) 7→ F (s o z)—, cálculo —F G—, y vuelta—G(s o z) 7→ g(t o kT )—. Donde T es el tiempo de muestreo, kT es el tiempodiscreto y t el tiempo analógico o continuo.
D-3. Método de Newton-Raphson (Raíces)
Pensemos en una función real (dominio), real valuada (codominio) —π :
R 7→ R—, cuya ley π(λ) es conocida, y supongamos que quisiéramos encontrarsus raíces, es decir los valores de la variable independiente λ que anulan laimagen π(λ). Éste es un problema con el que nos podemos encontrar fácil-mente. . . solo piensa que estás interesado en la obtención de los autovaloresde una matriz de 3 × 3 o de mayor dimensión. . . tienes un polinomio de grado3 o mayor ¿cómo calculas los autovalores?
En la figura D.1 aparece el fundamento del método:
1. Calculamos el valor de la función en un punto que sospechamos estácerca de una raíz. Llamamos a ese punto λ0 la semilla del algoritmo
2. Calculamos la recta tangente a la función en ese punto. Nos interesa laraíz de esa tangente, llamémosla λ1. Bajo ciertas condiciones este valorde la variable está más cerca de la raíz buscada, de modo que
3. Iterando varias veces nos acercaremos tanto como queramos a una raíz.En este caso diremos que el algoritmo converge a la solución
Deduzcamos una expresión para el método:
Escogemos una semilla λ0 y calculamos la recta tangente: su pendiente m0
no es más que la derivada de la función π en ese punto, m0 = π′(λ0), y debeser igual a
π′(λ0) =π(λ0)
λ0 − λ1
JOM - Transformaciones Lineales
163

Apéndice D. Mas sobre autovalores y autovectores D-3. Método de Newton-Raphson (Raíces)
λ
π(λ)
π
m0
m1m2
λ0
π(λ0)
λ1
π(λ1)
λ2
λ3
Figura D.1: Ilustración método de Newton-Raphson
de donde
λ1 = λ0 −π(λ0)
π′(λ0)
En la próxima, el valor siguiente de λ tendrá una expresión equivalente, demodo que en un paso genérico k + 1, la expresión será
λk+1 = λk −π(λk)
π′(λk)(D.5)
Ilustremos el caso con un ejemplo
Ejemplo D.2. Para el polinomio π(λ) = λ3 − 5λ2 − 4λ + 20, cuyas raíces son lasmismas que el representado en la figura D.1 –nada más que el polinomioestá dividido por 10–, calcula las raíces mediante el método de Newton-Raphson.pLa derivada de la función es dπ
dλ = π′(λ) = 3λ2 − 10λ − 4, cuyos ceros —π′(λc) = 0— se dan en λc = 1
3(5 ±√
37), es decir que entre dos puntoscríticos en el intervalo [−0.4283, 3.7616], debe haber una raíz; utilicemos la
164JOM - Transformaciones Lineales
D-3. Método de Newton-Raphson (Raíces) Apéndice D. Mas sobre autovalores y autovectores
semilla λ0 = 0.3 y efectuemos los cálculos iterativos que indica la ec. (D.5):
λ1 = 0.3− π(0.3)
π′(0.3)= 3.03060921248
λ1 = 3.03060921248− π(3.03060921248)
π′(3.03060921248)= 1.51846303533
λ1 = 1.51846303533− π(1.51846303533)
π′(1.51846303533)= 1.99930202736
λ1 = 1.99930202736− π(1.99930202736)
π′(1.99930202736)= 1.99999995946
λ1 = 1.99999995946− π(1.99999995946)
π′(1.99999995946)= 2
λ1 = 2− π(2)
π′(2)= 2
La raíz buscada es 2.y
Detalles• Cuando sucede como en este caso que la raíz
es entera no hay dudas que la sucesión Λ :
{ 0.3, 3.0306092124, 1.5184630353, 1.9993020273, 1.9999999594, 2. }converge y tenemos una respuesta. Si la raíz no fueraentera o la convergencia no se diese muy rápidamente—en pocas iteraciones—
La forma de salir exitosamente del algoritmo es fijarde antemano una diferencia entre sucesivos valores dela variable, por ejemplo |λk+1 − λk| < 0.001 y si ésto seda —estaríamos cometiendo errores no mayores a unmilésimo—, aceptar el valor λk+1 obtenido como la raízbuscada, en forma aproximada.
• Puede que la sucesión Λ no converja —los valores de λ seseparan cada vez más, u oscilan alrededor de un valor—.La forma de abandonar es habilitar un contador que seincremente cada vez que |λk+1 − λk| ≥ |λk − λk−1|.En ese caso puedes proceder a cambiar de semilla. Esprobable que hayas «caído» cerca de un máximo o unmínimo de la función π, con lo que su derivada en esepunto sea muy pequeña, y con ello el término restado dela ec.(D.5), muy grande, con lo que te alejas de la raíz,de modo que el algoritmo no puede regresar. . . o que pa-ra una semilla, la tangente te lleve a un valor donde se
JOM - Transformaciones Lineales
165
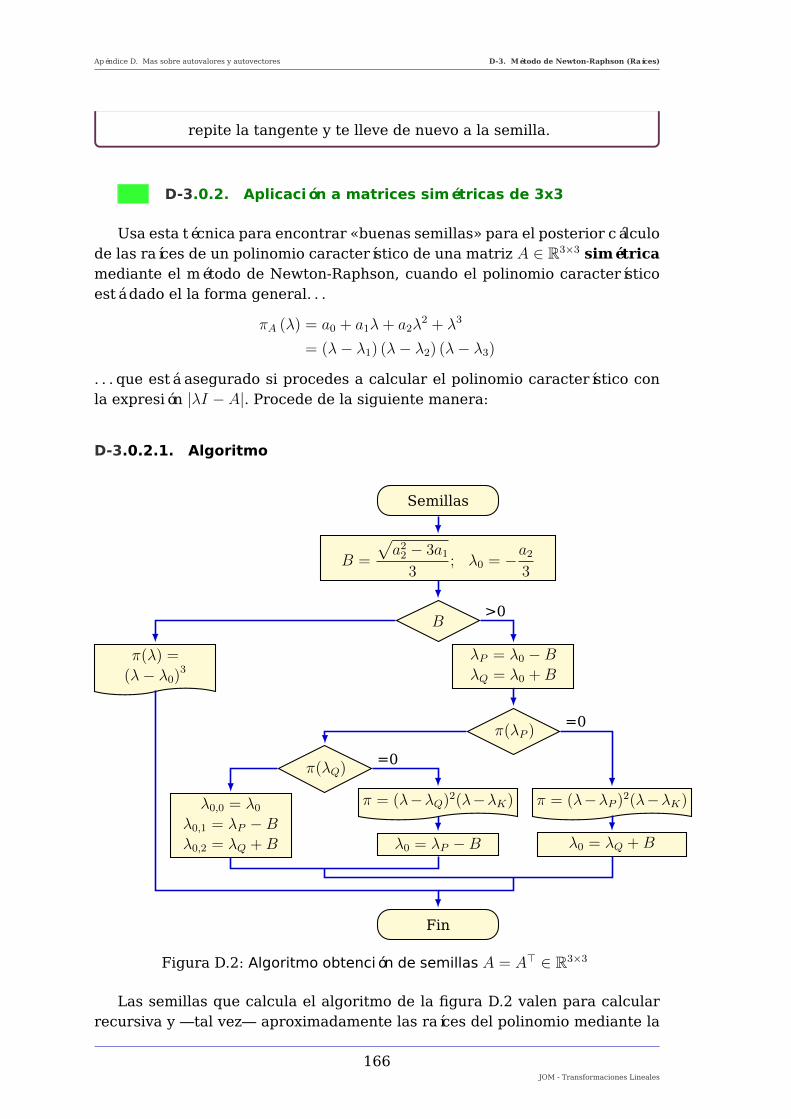
Apéndice D. Mas sobre autovalores y autovectores D-3. Método de Newton-Raphson (Raíces)
repite la tangente y te lleve de nuevo a la semilla.
D-3.0.2. Aplicación a matrices simétricas de 3x3
Usa esta técnica para encontrar «buenas semillas» para el posterior cálculode las raíces de un polinomio característico de una matriz A ∈ R3×3 simétricamediante el método de Newton-Raphson, cuando el polinomio característicoestá dado el la forma general. . .
πA (λ) = a0 + a1λ+ a2λ2 + λ3
= (λ− λ1) (λ− λ2) (λ− λ3)
. . . que está asegurado si procedes a calcular el polinomio característico conla expresión |λI − A|. Procede de la siguiente manera:
D-3.0.2.1. Algoritmo
Semillas
B =
√a22 − 3a1
3; λ0 = −a2
3
B
λP = λ0 −BλQ = λ0 +B
π(λP )
π(λQ)
λ0 = λP −B
π = (λ−λQ)2(λ−λK)λ0,0 = λ0λ0,1 = λP −Bλ0,2 = λQ +B λ0 = λQ +B
π = (λ−λP )2(λ−λK)
Fin
π(λ) =
(λ− λ0)3
=0
=0
>0
Figura D.2: Algoritmo obtención de semillas A = A> ∈ R3×3
Las semillas que calcula el algoritmo de la figura D.2 valen para calcularrecursiva y —tal vez— aproximadamente las raíces del polinomio mediante la
166JOM - Transformaciones Lineales

D-3. Método de Newton-Raphson (Raíces) Apéndice D. Mas sobre autovalores y autovectores
fórmula de Newton-Raphson adecuado a este caso:
λk+1 = λk −πA (λk)
π′A (λk)
= λk −λ3k + a2λ
2k + a1λk + a0
3λ2k + 2a2λk + a1
=2λ3k + a2λ
2k − a0
3λ2k + 2a2λk + a1(D.6)
el algoritmo comienza en k = 0 con la semilla λ0.
Sin embargo cuando A simétrica es rala, podrás calcular a las raíces antesde llegar al polinomio característico en forma general,
Por ejemplo
A =
1 2 0
2 2 0
0 0 3
por fila 3 . . . |λI − A| =
∣∣∣∣∣∣ λ− 1 −2 0
−2 λ− 2 0
0 0 λ− 3
∣∣∣∣∣∣desarrollando por la tercera fila tienes
πA (λ) = (λ− 3) [(λ− 1) (λ− 2)− 4]
= (λ− 3)[λ2 − 3λ− 2
]resolviendo sólo la parte de segundo grado, tienes
πA (λ) = (λ− 3)(λ− 3+
√17
2
)(λ− 3−
√17
2
)
Este procedimiento lo podrás hacer también cuando la matriz A de la forma
A =
a d e
d b f
e f c
cumpla con cualquier expresión
b− a =
(f
e− e
f
)d ; c− b =
(e
d− d
e
)f ; c− a =
(f
d− d
f
)e
Por ejemplo la matriz A =
a d e
d a e
e e c
cumple con la primera
JOM - Transformaciones Lineales
167

Apéndice D. Mas sobre autovalores y autovectores D-3. Método de Newton-Raphson (Raíces)
de las condiciones de arriba, el polinomio característico será∣∣∣∣∣∣ x− a −d −e
−d x− a −e−e −e x− c
∣∣∣∣∣∣ Línea 1 -Línea 2 arroja
∣∣∣∣∣∣ x− a+ d −(x− a+ d) 0
−d x− a −e−e −e x− c
∣∣∣∣∣∣ ya tienes un factor
(x− a+ d)
∣∣∣∣∣∣ 1 −1 0
−d x− a −e−e −e x− c
∣∣∣∣∣∣ eliminando e, d(∗)
(x− a+ d)
∣∣∣∣∣∣ 1 −1 0
0 x− a− d −e0 −2e x− c
∣∣∣∣∣∣Ese nuevo determinante, por más complicado que se vea, se-rá un polinomio de grado 2, de cual calcularás los otros dosvalores característicos.
D-3.0.3. Aplicación a matrices NO simétricas de 3x3
Cuando la matriz no es simétrica, no estará garantizado que
πA(λ) = a0 + a1λ+ a2λ2 + λ3
tenga tres raíces reales, por lo que la técnica anterior no ha de funcionarsiempre. Lo que puedes hacer en este caso es
1. Halla un intervalo simétrico [−r , r], donde seguro están todas las raícesreales:
r = 1 + max {|a0| , |a1| , |a2|}
2. Aplica el método dado por la ecuación (D.6) con la semilla λ0 = −r, tenen cuenta que si en alguna iteración λk+1 «cae fuera de» [−r , r], u oscilaentre dos valores, has que abandonar el algoritmo y has de empezar conuna semilla distinta, dentro del mismo intervalo.
168JOM - Transformaciones Lineales
Apéndice E
Más aún sobre autovalores yautovectores
E-1.Aplicación de una transformación más de una vez . . . . . . . . 169
E-1.1. Matriz asociada diagonal . . . . . . . . . . . . . . . . . . . 169
E-1.2. “Movimiento” de un autovector . . . . . . . . . . . . . . . 170
E-2.Espacios invariantes . . . . . . . . . . . . . . . . . . . . . . . . . . . 171
E-3.Base ortonormal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
E-3.1. Método de Grahm-Schmidt . . . . . . . . . . . . . . . . . . 174
E-3.2. Método del espacio generado . . . . . . . . . . . . . . . . 175
E-3.3. Guión Matlab/Freemat para ortonormalización de bases . 176
E-1. Aplicación de una transformación más de una vez
La idea es volver aplicar una misma TL L : V → V a un vector v de V .Tomemos por ejemplo [L ], la matriz asociada a L
[v′] = [L] [v] y luego [v′′] = [L] [v′]
Si lo hacemos todo de una vez, la nueva TL L2 estará asociada a la matriz
[v′′] = [L]2 [v]
hasta acá no hay nada nuevo, se trata de hallar la composición L2 = L ◦ L
E-1.1. Matriz asociada diagonal
La pregunta es:
¿Cómo sería la matriz asociada final si se tomara la base de autovectores de
169

Apéndice E. Más aún sobre autovalores y autovectores E-1. Aplicación de una transformación más de una vez
[L ]?La respuesta viene luego del análisis. . . estamos proponiendo que
L : V → V | v′ = L (v)
y entonces
[v′]1 = [L1]1 [v]1
= Q−1 [L]Q [v]1 = DL [v]1
=
λ1 0 · · · 0
0 λ2 · · · 0...
.... . .
...0 0 · · · λn
·v1v2...vn
1
Claramente
[L2 ] = Q−1LQ ·Q−1LQ = Q−1L2Q
= DL ·DL = D2L
= (di,j) donde
{di,i = λi
di,i = 0
Es una matriz diagonal con los autovalores al cuadrado en la diagonal.
E-1.2. “Movimiento” de un autovector
Si (λ, v) fuera un par autovalor-autovector de [L ] con el cuerpo de losreales, entonces
Lv = λv y L2v = Lλv = λ2v y Lnv = λnv
La interpretación en el campo de los reales, es que si el autovalor fuera ceroo uno, los sucesivos mapeos lo dejan invariante. Si λ fuera de valor absolutomenor a 1, las sucesivas transformaciones lo acercarían al vector nulo, y el«rastro» yacería en la línea generada por { v }.
De la misma manera, si el autovalor fuera de valor absoluto mayor que 1, su-cesivas transformaciones lo alejarían del origen, sobre la misma recta. Demásestá decir que cuando el autovalor es negativo, las sucesivas transformacioneslo harán oscilar acercándose —|λ| < 1— o alejándose —|λ| > 1— del centro.
Esta podría usarse como una prueba gráfica aproximada para en-contrar un autovector. Lo ponemos en práctica en el archivo geogebramapeo15veces.ggb, el cual está disponible por correo electrónico.
Puedes generar algo parecido valiéndote de la capacidad de planilla de cálculode Geogebra: En A1 .. B2 define la matriz asociada, luego selecciona los cuatro
170JOM - Transformaciones Lineales

E-2. Espacios invariantes Apéndice E. Más aún sobre autovalores y autovectores
números, haz clic derecho y elige Crea Matriz. Renombra la matriz creada aL. Define un nuevo punto en la vista gráfica, llámalo v. Vuelve a la planilla, enC1 escribe =L*v, en C2 escribe =L*C1. Selecciona C2. Copia esto hasta C20,para tener 21 puntos.
Por otro lado, si se utilizara un vector NO Autovector para hacer el experi-mento, el resultado no será una línea recta: cada vez que se mapee sucesiva-mente ese vector, no conservará la dirección. ¿Puedes encontrar una transfor-mación lineal que bajo este experimento describa una espiral?, es decir, algo
como la figura Me puedes pedir el archivo espiral.ggb.
E-2. Espacios invariantes
Dada una TL L : V → V , con dim (V ) = n finita, un conjunto de autovecto-res Ei = { v1, v2, · · · , vk } todos asociados a un mismo autovalor λi, es generadorde un subespacio.Si el conjunto contiene el máximo número de autovectores linealmente inde-pendientes asociados al mismo autovalor, el espacio generado se denota Ei deV . . .Ei = {u | L (u) = λi u}, tales espacios se denominan subespacios invariantes yson muy utilizados en la teoría de control —de sistemas físicos dinámicos quepueden describirse por ecuaciones diferenciales ordinarias—, con nombres yconceptos específicos.
Prueba
Sea A la matriz asociada a la transformación lineal L. Y sean cada unode los autovectores v1, v2, · · · , vk asociados a un autovalor λi . Todos losvj cumplen con la relación
A vj = λi vj , j = 1, 2, · · · , k ≤ n
Considera además el conjunto Ei de las combinaciones lineales de Ei =
{ v1, v2, · · · , vk }, lo podemos escribir
Ei =
{u | u =
k∑j=1
αj vj
}
Este es justamente el subespacio generado por Ei, es decir Ei = gen(Ei),veamos si este conjunto es cerrado, es decir si cualquier vector de ese
JOM - Transformaciones Lineales
171
Apéndice E. Más aún sobre autovalores y autovectores E-3. Base ortonormal
conjunto cumple A u = λi u
A u = A
k∑j=1
αj vj la definición de u
=k∑j=1
A (αj vj) A es cte., propiedad sumatorio
=k∑j=1
αj (A vj) escalamiento en matrices
=k∑j=1
αj λi vj par autovalor-autovector
= λi
k∑j=1
αj vj λi es constante en sumatorio
= λi u
donde hemos probado que cualquier combinación lineal de los autovec-tores de un mismo autovalor también es autovector del mismo autovalor,y todos ellos forman un subespacio Ei de dim (Ei) ≤ k —nada hemosdicho acerca de la dependencia o independencia de los autovectoresv1, v2, · · · , vk—, entonces esta prueba vale también para el caso de unabase de autovectores asociados a un solo autovalor.
Formalmente un subespacio invariante se da en las transformaciones linea-les de un espacio en sí mismo T : V → V donde la imagen de un subespacio esotro subespacio.
E-3. Base ortonormal
Ya habíamos dicho que si todos los autovectores en las columnas de unamatriz de n×n son linealmente independientes (LI), éstos pueden considerarseuna base de un espacio de dimensión n.
Aún cuando no se trate de matrices asociadas sino simplemente de bases,el problema es el mismo: encontrar una base del mismo espacio en la quetodos los vectores son unitarios y normales entre sí.
Formalmente : B = { v1, v2, · · · , vn }
∃BN = { u1 , u2, · · · , un } | gen(BN) = gen(B) ; ui · uj = 0∀i 6= j
En otras palabras, estamos tratando de encontrar una matriz de diagonaliza-ción ortogonal.
Este concepto no está solamente ligado a los espacios euclidianos, peronosotros nos limitamos a ellos.
172JOM - Transformaciones Lineales
E-3. Base ortonormal Apéndice E. Más aún sobre autovalores y autovectores
Ejemplo E.1. Encuentra una base ortonormal para el espacio generado porB1 = { v1, v2 }, siendo los vectores v1 = (2, 1, 0, 0) y v2 = (1, 1, 0, 0).pEs evidente que B1 no es ortonormal, ya que |v2| > 1, y además v1 · v2 6= 0.
Este es un caso para poner en práctica la idea, porque puedes resolverlosin necesidad de teoría alguna: construye el subespacio generado por B1,el cual es S = {(x, y, 0, 0)} de donde obtienes BN1 = {(1, 0, 0, 0) , (0, 1, 0, 0)}por inspección.Para desarrollar la idea, daremos dos métodos para encontrar una baseBN = {u1 , u2} que sea ortonormal.
1- Método uno1- a. Construyamos el espacio generado por B11- b. Tomemos un vector con la mayor cantidad de ceros1- c. Propongamos otro vector del espacio, que además sea normal a todoslos anteriores1- d. Repitamos 1-c hasta agotar la cantidad de vectores normales necesa-rios1- e. Dividamos cada vector encontrado por su módulo y presentemos labase
No es necesario decir que este método en este caso lleva a la base encon-trada en primer término.
2 - Método dos. Tomamos directamente el primer vector u1 = v1 y for-mamos u2 = v2 − k1u1, de manera que como u1 y u2 deben ser normales elproducto escalar(1)
u1 · u2 = u1 · v2 − k1u1 · u1 = 0⇒ k1 =u1 · v2u1 · u1
en este caso k1 =(2, 1, 0, 0)(1, 1, 0, 0)
(2, 1, 0, 0)(2, 1, 0, 0)=
5
3de donde
u2 =5
5(1, 1, 0, 0)− 3
5(2, 1, 0, 0)
= (−1, 2, 0, 0)
de modo que la base ortonormal es
BN1 = { (0.4, 0.2, 0, 0), (−0.2, 0.4, 0, 0) }
después de cambiar cada vector ui por su versor correspondiente.y
Esto parece tedioso, pero es el método más directo que garantiza la obten-ción de la base ortonormal.
1recuerda la distributividad del producto escalar en la suma: a · (b+ c) = a · b+ a · c.
JOM - Transformaciones Lineales
173
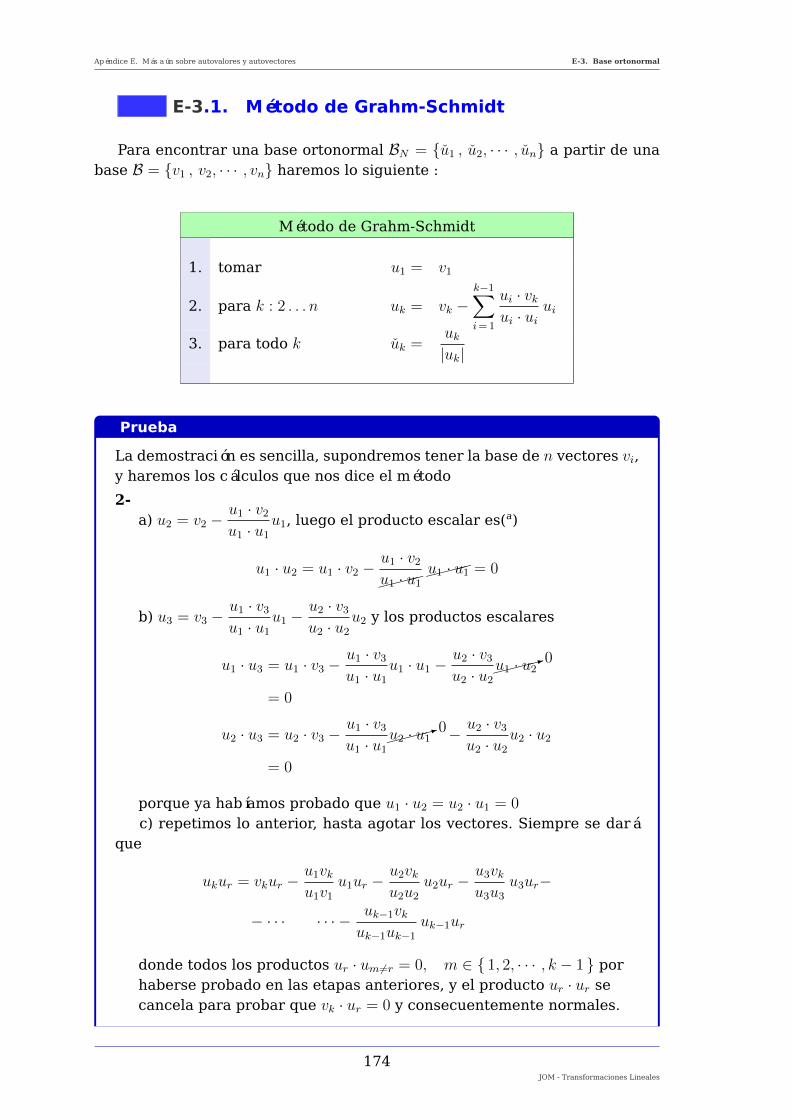
Apéndice E. Más aún sobre autovalores y autovectores E-3. Base ortonormal
E-3.1. Método de Grahm-Schmidt
Para encontrar una base ortonormal BN = {u1 , u2, · · · , un} a partir de unabase B = {v1 , v2, · · · , vn} haremos lo siguiente :
Método de Grahm-Schmidt
1. tomar u1 = v1
2. para k : 2 . . . n uk = vk −k−1∑i=1
ui · vkui · ui
ui
3. para todo k uk =uk|uk|
Prueba
La demostración es sencilla, supondremos tener la base de n vectores vi,y haremos los cálculos que nos dice el método
2-a) u2 = v2 −
u1 · v2u1 · u1
u1, luego el producto escalar es(a)
u1 · u2 = u1 · v2 −u1 · v2���
�u1 · u1 ����u1 · u1 = 0
b) u3 = v3 −u1 · v3u1 · u1
u1 −u2 · v3u2 · u2
u2 y los productos escalares
u1 · u3 = u1 · v3 −u1 · v3u1 · u1
u1 · u1 −u2 · v3u2 · u2�
���:0u1 · u2
= 0
u2 · u3 = u2 · v3 −u1 · v3u1 · u1�
���:0u2 · u1 − u2 · v3
u2 · u2u2 · u2
= 0
porque ya habíamos probado que u1 · u2 = u2 · u1 = 0
c) repetimos lo anterior, hasta agotar los vectores. Siempre se daráque
ukur = vkur −u1vku1v1
u1ur −u2vku2u2
u2ur −u3vku3u3
u3ur−
− · · · · · · − uk−1vkuk−1uk−1
uk−1ur
donde todos los productos ur · um6=r = 0, m ∈ { 1, 2, · · · , k − 1 } porhaberse probado en las etapas anteriores, y el producto ur · ur secancela para probar que vk · ur = 0 y consecuentemente normales.
174JOM - Transformaciones Lineales

E-3. Base ortonormal Apéndice E. Más aún sobre autovalores y autovectores
3-Después de esta cuenta, todos los vectores u tornan versores
y ya está.
aTen en cuenta que u1·v2u1·u1
es un escalar
Si ordenas de otro modo la base de partida, posiblemente obtendrás una baseortonormal distinta.
E-3.2. Método del espacio generado
Este método es intuitivo, pero descansa mucho en la forma de expresar lossubespacios que hemos visto en el libro anterior. La aplicación la entenderásmejor a partir de la comparativa, en el ejemplo siguiente.
Ejemplo E.2. Ortonormaliza la base B = {(1, 0, 0, 1) , (1, 1, 0, 1) , (2, 3,−1, 1)}pUsando el método GS:
u1 = (1, 0, 0, 1)
u2 = (1, 1, 0, 1)− 2
2(1.0, 0, 1) = (0, 1, 0, 0)
u3 =2
2(2, 3,−1, 1)− 3
2(1, 0, 0, 1)− 6
2(0, 1, 0, 0)
= (1, 0,−2,−1)
con lo que la base pedida es
BN =
{(1√2, 0, 0,
1√2
), (0, 1, 0, 0) ,
(− 1√
6, 0,
2√6,
1√6
)}ypno descartemos el método del espacio generado
S = {(x, y, z, z + x)}
de donde podemos extraer dos vectores ralos normales entre sí (la dimen-sión es tres), como si se tratara de la base canónica y actuemos sobre untercero.
v1 = (0, 1, 0, 0) v2 = (1, 0, 0, 1) v3 = (x, y, z, z + x)
(ya que v1 · v2 = 0), busquemos u3 tal que
u1 · v3 = 0 ⇒ y = 0
v2 · v3 = 0 ⇒ z + 2x = 0
JOM - Transformaciones Lineales
175

Apéndice E. Más aún sobre autovalores y autovectores E-3. Base ortonormal
por lo que
u3 = (−1, 0, 2, 1)
con lo que
BN =
{(0, 1, 0, 0) ,
(1√2, 0, 0,
1√2
),
(− 1√
6, 0,
2√6,
1√6
)}las bases halladas no serán en general las mismas, como en este caso; quefueron obtenidas de esa manera sólo con fines didácticosy
Para que veas lo sencillo que es programar el método de las combinacioneslineales (Grahm - Schmidt, GS) y el esencialmente intuitivo del espacio gene-rado, puedes ver los guiones –“scripts”– Matlab/Octave gram y su subordinadabaseort.
E-3.3. Guión Matlab/Freemat para ortonormaliza-
ción de bases
function B = gram(A)% GRAM Ortonormalización de bases.% uso: BaseNormalizada = gram(Base)% Base: matriz cuyas columnas son% los vectores de la base
A = baseort(A); %llama a la función de abajo...B=A;for k=1:size(A,2) %... y calcula autoversores
B(:,k) = A(:,k)/norm(A(:,k));end%FIN de gram.m
function B = baseort(A)% BASEORT Ortogonalización de bases.% uso: BaseOrtogonal = baseort(Base)% Base: matriz cuyas columnas son% los vectores de la base
m = cell(3,1);m{1}= sprintf(’\t argumento: matriz Base a Nomalizar’);m{3}= sprintf(’\t A No es linealmente independiente’);
if nargin~=1,error(m{1});end
[f,c]= size(A);G = A.’*A;g=det(G);
176JOM - Transformaciones Lineales
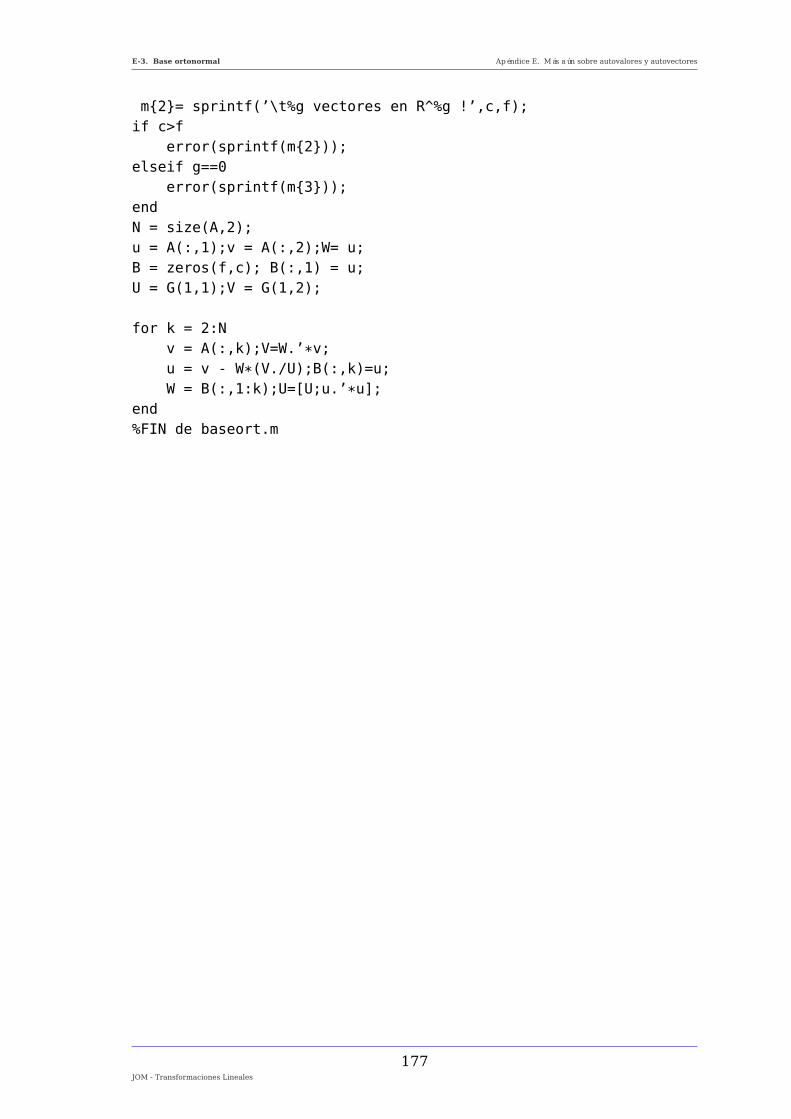
E-3. Base ortonormal Apéndice E. Más aún sobre autovalores y autovectores
m{2}= sprintf(’\t%g vectores en R^%g !’,c,f);if c>f
error(sprintf(m{2}));elseif g==0
error(sprintf(m{3}));endN = size(A,2);u = A(:,1);v = A(:,2);W= u;B = zeros(f,c); B(:,1) = u;U = G(1,1);V = G(1,2);
for k = 2:Nv = A(:,k);V=W.’*v;u = v - W*(V./U);B(:,k)=u;W = B(:,1:k);U=[U;u.’*u];
end%FIN de baseort.m
JOM - Transformaciones Lineales
177

Apéndice E. Más aún sobre autovalores y autovectores E-3. Base ortonormal
178JOM - Transformaciones Lineales
Apéndice F
Extras sobre aplicaciones
F-1. «Afinización» de cuádricas y cónicas . . . . . . . . . . . . . . . . . 179
F-2. Formas cuadráticas . . . . . . . . . . . . . . . . . . . . . . . . . . . 180
F-3. Forma canónica de Jordan . . . . . . . . . . . . . . . . . . . . . . . 181
F-3.1. Cálculo de la forma canónica de Jordan . . . . . . . . . . . 182
F-3.2. Potencia de una matriz con forma canónica de Jordan . . 186
F-3.2.1. Potencia de un bloque de Jordan cuando el auto-valor es cero . . . . . . . . . . . . . . . . . . . . . 187
F-1. «Afinización» de cuádricas y cónicas
La ecuación matricial de la cuádrica, por ser más general, es
v>Av +Bv = c
pero la pudes escribir
v>Av + 2Kv = c, 2K = B
de modo que con el «cambio de variables»
w =
[1
v
]puedes escibir
w>
−c K
K> A
w = 0
w> A w = 0
la cual puedes comprobar sencillamente efectuando los cálculos. En otras pa-labras: hemos descripto un cuádrica o cónica poniendo toda la información enuna sola matriz.
179

Apéndice F. Extras sobre aplicaciones F-2. Formas cuadráticas
Ejemplo F.1. Procede a encontrar la forma afinizada para la ecuación de lacónica de posición general, que aparece en el ejemplo 6.1, de pág.107.pEn ese caso
[v] =
[x
y
], A =
[7 −3
√3
−3√
3 13
]
B =[
12√
3 + 64 12− 64√
3]
c = −276
escribiríamos la matriz central y las variables como
A =
276 6
√3 + 32 6− 32
√3
6√
3 + 32 7 −3√
3
6− 32√
3 −3√
3 13
w =
1
x
y
. . . que tiene la ventaja de ser simétrica.La respuesta solicitado es
[1 x y
] 276 6
√3 + 32 6− 32
√3
6√
3 + 32 7 −3√
3
6− 32√
3 −3√
3 13
1
x
y
= 0
es equivalente de7x2 − 6
√3xy + 13y2 + (12
√3 + 64)x+ (12− 64
√3)y + 276 = 0.
y
F-2. Formas cuadráticas
Toda función vectorial F (v) = F (x1, x2, · · · , xn) que pueda expresarse co-mo F (v) = v>Av —matricialmente— o F (v) = Av · v —matricial y producto
escalar—, es una forma cuadrática de orden n, donde v =
x1x2...xn
. Las que
hemos visto anteriormente fueron los casos de segundo y tercer orden, o sea
v =
[x
y
]en el caso de las cónicas, y v =
x
y
z
en el caso de las cuádricas.
Todos los monomios con coeficiente no cero de una forma cuadrática tienenel mismo grado total —polinomio homogéneo—.
180JOM - Transformaciones Lineales

F-3. Forma canónica de Jordan Apéndice F. Extras sobre aplicaciones
Por ejemplo: a1x2 + a2y2 + a12xy lo es,
pero la función polinomial a0 + a1x+ a2x2 no lo es, porque los
monomios tienen grado total 0, 1 y 2 respectivamente.
Una forma cuadrática F (v) es positiva definida si F (v) > 0 para toda v 6= θ,y F (v) = 0 para v = θ. Y se puede demostrar que la matriz asociada a la formacuadrática tiene todos sus autovalores mayores que cero, esto es λi > 0, i =
1, 2, · · ·n. Aplicado a nuestros problemas: expresan circunferencias, elipses,esferas y elipsoides, de acuerdo con el orden.
Una forma cuadrática F (v) es positiva semidefinida si F (v) ≥ 0 para todav 6= θ, y F (v) = 0 para v = θ. Y se puede demostrar que la matriz asociada ala forma cuadrática tiene todos sus autovalores no menores que cero, esto esλi ≥ 0, i = 1, 2, · · ·n.
Una forma cuadrática F (v) es negativa definida si F (v) < 0 para todav 6= θ, y F (v) = 0 para v = θ. Y se puede demostrar que la matriz asociadaa la forma cuadrática tiene todos sus autovalores menores que cero, esto esλi < 0, i = 1, 2, · · ·n
Una forma cuadrática F (v) es negativa semidefinida si F (v) ≤ 0 para todav 6= θ, y F (v) = 0 para v = θ. Y se puede demostrar que los autovalores de lamatriz asociada son todos no mayores que cero, esto es λi ≤ 0, i = 1, 2, · · ·n
Y por último, una forma cuadrática F (v) es no definida si no es alguna delas anteriores
Las formas cuadráticas no definidas expresan por ejemplo parábolas o pa-raboliodes, o degeneraciones. Las formas no definidas expresan hipérbolas.Nuevamente, estos conceptos aparecen en el estudio de sistemas dinámicosde ingeniería, para estimar la estabilidad de los mismos.
F-3. Forma canónica de Jordan
¿Qué sucedía cuando no podías diagonalizar una matriz?
simplemente la dejábamos allí.Sin embargo esas matrices aún pueden llevarse a una forma —la foma deJordan— casi diagonal, donde todavía es fácil calcular el cuadrado, el cubo,etc. de la matriz, y además tiene otras propiedades.
En uno de los ejemplos hemos visto que la matriz
A =
[2 1
0 2
]no se pudo diagonalizar porque hay un solo autovector linealmente indepen-diente ligado al autovalor 2 de multiplicidad 2. Pues bien, A está justamenteexpresada en la forma de Jordan.
JOM - Transformaciones Lineales
181

Apéndice F. Extras sobre aplicaciones F-3. Forma canónica de Jordan
La forma de Jordan está compuesta de bloques diagonales como el anterior,en los que los autovalores repetidos tienen un sólo autovector LI,
Por ejemplo
A =
2 1 0
0 2 0
0 0 3
tiene un bloque elemental de Jordan de 2do orden —
[2 1
0 2
]—
y un bloque diagonalizable de Jordan de 1er orden —[3]—.
La matriz
A =
2 1 0 0
0 2 0 0
0 0 3 0
0 0 0 3
tiene tres bloques de Jordan, uno de segundo orden con auto-valor 2 y dos de primer orden, con autovalor repetido 3.
En cambio la
A =
2 1 0 0
0 2 0 0
0 0 3 1
0 0 0 3
tiene dos bloques de Jordan de segundo orden.
Un ejemplo final :
A =
2 1 0 0
0 2 1 0
0 0 2 0
0 0 0 3
tiene dos bloques de Jordan, uno de tercer orden y otro deprimer orden
Recuerda lo que es el polinomio característico —πA (λ)— y el polinomiomínimo —pA (λ)—. El orden del polinomio mínimo es el orden del mayor bloquede Jordan asociado a los autovalores.
F-3.1. Cálculo de la forma canónica de Jordan
Para hallar la matriz que «diagonalice a la forma de Jordan» puedes proce-der de la manera siguiente:
Para cada autovalor λi, con multiplicidad m:
1. Hallas la estructura de la matriz de Jordan equivalente. Es decir, cuántosbloques y de qué grado.
a) Halla rk = rango((λi I − A)k
)para k ∈ { 0, 1, · · · ,m }
182JOM - Transformaciones Lineales

F-3. Forma canónica de Jordan Apéndice F. Extras sobre aplicaciones
b ) Halla dp = rp+1 − 2rp + rp−1 para p ∈ { 1, 2, · · · ,m }Habrán dp bloques de Jordan con grado p. Con ello produces una matrizJi con los bloques de Jordan.
2. Calculas los autovectores asociados. (λi I − A)vi,0 = λivi,0
3. Calculas los «autovectores generalizados» asociados(λi I − A)vi,k+1 = −vi,k con k ∈ { 0, 1, · · · ,m− 1 }
Los ejemplo lo aclaran un poco:
Ejemplo F.2. Si no puedes diagonalizar la matriz A =
[3 1
−1 1
], trata de pa-
sarla a la forma de JordanpEl polinomio característico —y mínimo— de esta matriz es πA(λ) = (λ−2)2,con lo que su valor propio es λ = 2, de multiplicidad algebraica m = 2. Elproceso del cálculo de los autovectores arroja solamente un representante—multiplicidad geométrica g = 1— de v = (a,−a), o v1,0 = (1,−1), por loque no admite diagonalización.
Como la matriz es de 2 × 2, habrá un bloque de Jordan de orden 2, con elautovalor 2.
Lo podríamos haber calculado mediante
r0 = rango((λi I −A)0
)= 2 d1 = r2 − 2r1 + r0 = 0
r1 = rango((λi I −A)1
)= 1 d2 = r3 − 2r2 + r1 = 1
r2 = rango((λi I −A)2
)= 0
r>2 = 0
Un bloque de orden 2, es decir J =
[2 1
0 2
].
. . . pero ¿cómo lo calculamos?En otras palabras
¿Cómo construimos una matriz «diagonalizante» ?
Sabemos que Av1,0 = λ1v1,0 tenemos un solo autovector linealmente inde-pendiente y para formar la matriz similar
J = V −1AV
necesitamos dos.
En un caso más general en esta dimensión, puedes escribir
V J = A V
⇓
[ v1,0 v1,1 ]
[λ1 1
0 λ1
]= A [ v1,0 v1,1 ]
⇓[λ1v1,0 v1,0 + λ1v1,1 ] = [Av1,0 Av1,1 ]
JOM - Transformaciones Lineales
183

Apéndice F. Extras sobre aplicaciones F-3. Forma canónica de Jordan
Las entradas de estas matrices deben ser iguales, Av1,0 = λ1v1,0, la cualrepresenta el par autovalor-autovector (λ1, v1,0), —en el caso del ejemplo:(2, (x, 0)), usamos (1, 0)— y
Av1,1 = v1,0 + λ1v1,1
que representará el cálculo del autovector generalizado. v1,1 lo puedesescribir:
(λ1I −A)v1,1 = −v1,0
En ese caso, v1,1 = (x, 1 − x), utilizamos v1,1 = (1, 0) el «autovector» asícalculado recibe el nombre de autovector generalizado asociado al au-tovalor 2. Con lo cual la diagonalizante —o mejor: matriz de paso— es
V =
[1 1
−1 0
]Y las cuentas dan[
0 −1
1 1
] [3 1
−1 1
] [1 1
−1 0
]=
[2 1
0 2
]como podrás comprobar.y
Ejemplo F.3. Repite para el caso donde B =
4 1 1
−2 1 −1
−2 −1 1
.
pEl único autovalor es x = 2, con multiplicidad 3: πB(x) = (x − 2)3 y elpolinomio mínimo es pB(x) = (x− 2)2, anticipando que hay dos bloques deJordan, como la matriz es de 3 × 3, no puede ser sino un bloque de ordendos y otro de orden 1.
r0 = rango((λi I −B)0
)= 3 d1 = r2 − 2r1 + r0 = 1
r1 = rango((λi I −B)1
)= 1 d2 = r3 − 2r2 + r1 = 1
r≥2 = rango((λi I −B)2
)= 0
Calculemos entonces los autovectores y los autovectores generalizados:
(2I −B)v = θ ⇒ v = (a, b,−2a− b)
de donde podemos extraer dos autovectores linealmente independientes.Sin embargo no lo hagamos aún, sino hasta:
(2IB)v1,1 = −v ⇒
−2 −1 −1 −a2 1 1 −b2 1 1 2a+ b
184
JOM - Transformaciones Lineales

F-3. Forma canónica de Jordan Apéndice F. Extras sobre aplicaciones
Si para reducir, nos quedáramos con la segunda fila, los valores de a
y de b deben ser opuestos, de lo contrario el sistema sería incompa-tible, por ello tomamos el primer vector v1,0 = (−1, 1, 1) con lo quev1,1 = (x, y,−1 − 2x − y), podemos extraerlo de tal manera que no per-tenezca a { (a, b,−2a− b) }. . . puede ser v1,1 = (0, 0,−1), el tercero es unautovector no colineal con el primero: v2,0 = (1, 0,−2)
Entonces la matriz de paso será
−1 0 1
1 0 0
1 −1 −2
y así:
−1 0 1
1 0 0
1 −1 −2
−1 4 1 1
−2 1 −1
−2 −1 1
−1 0 1
1 0 0
1 −1 −2
=
2 1 0
0 2 0
0 0 2
como puedes comprobar.y
Ejemplo F.4. Repite para el caso donde F =
3 0 −1
−1 4 7
0 −1 −1
.
pOtra vez, tenemos que πF (x) = (x − 2)3 = pF (x) de modo que habrá unsolo bloque de Jordan.El autovector asociado es v1 = (x,−3x, x), es decir, si tomáramos v1 =
(1,−3, 1), necesitaríamos dos autovectores generalizados:
(2I − F )w1 = v1 ⇒
−1 0 1
1 −2 −7
0 1 3
a′b′c′
=
−1
3
−1
arroja w1 = (a′, 2− 3a′, a′ − 1), que con a′ = 1 formamos w1 = (1,−1, 0), y
(2I − F )w2 = w1 ⇒
−1 0 1
1 −2 −7
0 1 3
a′′b′′c′′
=
−1
1
0
arroja w1 = (a′′, 3− 3a′′, a′′ − 1), que con a′′ = 1 formamos w2 = (1, 0, 0)
por tanto la matriz de paso será V =
1 1 1
−3 −1 0
1 0 0
, y la matriz de Jordan
equivalente a F será J =
2 1 0
0 2 1
0 0 2
y
Esto también lo usarás en la búsqueda de soluciones para sistemas diná-micos lineales en función de una matriz fácil de multiplicarse por si misma.
JOM - Transformaciones Lineales
185
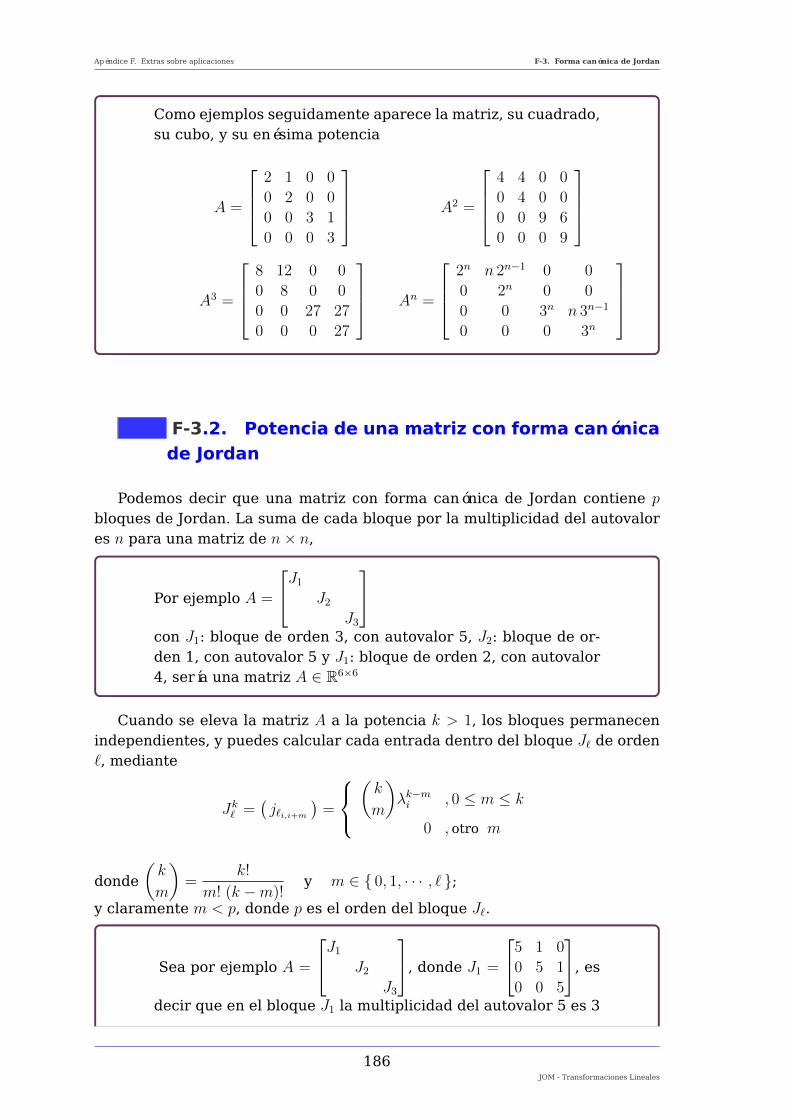
Apéndice F. Extras sobre aplicaciones F-3. Forma canónica de Jordan
Como ejemplos seguidamente aparece la matriz, su cuadrado,su cubo, y su enésima potencia
A =
2 1 0 0
0 2 0 0
0 0 3 1
0 0 0 3
A2 =
4 4 0 0
0 4 0 0
0 0 9 6
0 0 0 9
A3 =
8 12 0 0
0 8 0 0
0 0 27 27
0 0 0 27
An =
2n n 2n−1 0 0
0 2n 0 0
0 0 3n n 3n−1
0 0 0 3n
F-3.2. Potencia de una matriz con forma canónica
de Jordan
Podemos decir que una matriz con forma canónica de Jordan contiene p
bloques de Jordan. La suma de cada bloque por la multiplicidad del autovalores n para una matriz de n× n,
Por ejemplo A =
J1 J2J3
con J1: bloque de orden 3, con autovalor 5, J2: bloque de or-den 1, con autovalor 5 y J1: bloque de orden 2, con autovalor4, sería una matriz A ∈ R6×6
Cuando se eleva la matriz A a la potencia k > 1, los bloques permanecenindependientes, y puedes calcular cada entrada dentro del bloque J` de orden`, mediante
Jk` =(j`i,i+m
)=
(k
m
)λk−mi , 0 ≤ m ≤ k
0 , otro m
donde
(k
m
)=
k!
m! (k −m)!y m ∈ { 0, 1, · · · , ` };
y claramente m < p, donde p es el orden del bloque J`.
Sea por ejemplo A =
J1 J2J3
, donde J1 =
5 1 0
0 5 1
0 0 5
, es
decir que en el bloque J1 la multiplicidad del autovalor 5 es 3
186JOM - Transformaciones Lineales

F-3. Forma canónica de Jordan Apéndice F. Extras sobre aplicaciones
—y su multiplicidad geométrica es 1—
J21 =
5 1 0
0 5 1
0 0 5
2
=
(20
)52−0 (
21
)52−1 (
22
)52−2
0(20
)52−0 (
21
)52−1
0 0(20
)52−0
=
1 · 52 2 · 51 1 · 50
0 1 · 52 2 · 51
0 0 1 · 52
=
25 10 1
0 25 10
0 0 25
F-3.2.1. Potencia de un bloque de Jordan cuando el autovalores cero
Un bloque de Jordan de orden p es p-nilpotente cuando su autovalor escero.
Como concecuencia de lo anterior, Jp0 es tal que
j0i,i+m=
(k
m
)0k−m , 0 ≤ m ≤ k
0 , otro m
=
{1 ,m = k
0 , otro m
Cuando k = p, el 1 aparece recién para m = p, pero m debe ser menor que p.
Sea por ejemplo A = J0,4 =
0 1 0 0
0 0 1 0
0 0 0 1
0 0 0 0
, expondremos abajo
las potencias crecientes del cuadrado, el cubo y la cuartapotencia
A2 =
0 0 1 0
0 0 0 1
0 0 0 0
0 0 0 0
, A3 =
0 0 0 1
0 0 0 0
0 0 0 0
0 0 0 0
, A4 =
0 0 0 0
0 0 0 0
0 0 0 0
0 0 0 0
JOM - Transformaciones Lineales
187
Apéndice F. Extras sobre aplicaciones F-3. Forma canónica de Jordan
188JOM - Transformaciones Lineales

Apéndice G
Transformaciones de lacircunferencia
G-1.Mapeos lineales de la circunferencia unitaria . . . . . . . . . . . 190
G-1.1.Caso 1: det(L) 6= 0, Elipse . . . . . . . . . . . . . . . . . . . 192
G-1.1.1.Matriz asociada con autovalores complejos . . . . 192
G-1.1.2.Matriz asociada con autovalores reales . . . . . . 193
G-1.2.Caso 2: det(L) = 0, Segmentos . . . . . . . . . . . . . . . . 195
G-1.2.1.Proyecciones (escaladas) . . . . . . . . . . . . . . 195
G-1.2.2.ejemplo . . . . . . . . . . . . . . . . . . . . . . . . 201
Supongamos la transformación lineal L((x, y)
)= (x, x + y)
y que quisiéramos estudiar cómo se mapea la circunferenciaunitaria mediante la TL L
La circunferencia unitaria la puedes parametrizar como[cosα
senα
], α ∈ [0; 2π), y desparametrizada es x2 + y2 = 1.
El mapeado entonces queda:[1 0
1 1
] [cosα
senα
]=
[cosα
senα + cosα
]es decir que x′ = cosα y además y′ = senα + cosα, de donde
x′2 = cos2 α
y′2 = (senα + cosα)2 = 1 + 2 senα cosα
x′y′ = cos2 α + senα cosα
de donde obtenemos la ecuación desparametrizada de la ima-gen de x2 + y2 = 1 a través de L
2x′2 − 2x′y′ + y′2 = 1 (G.1)
189
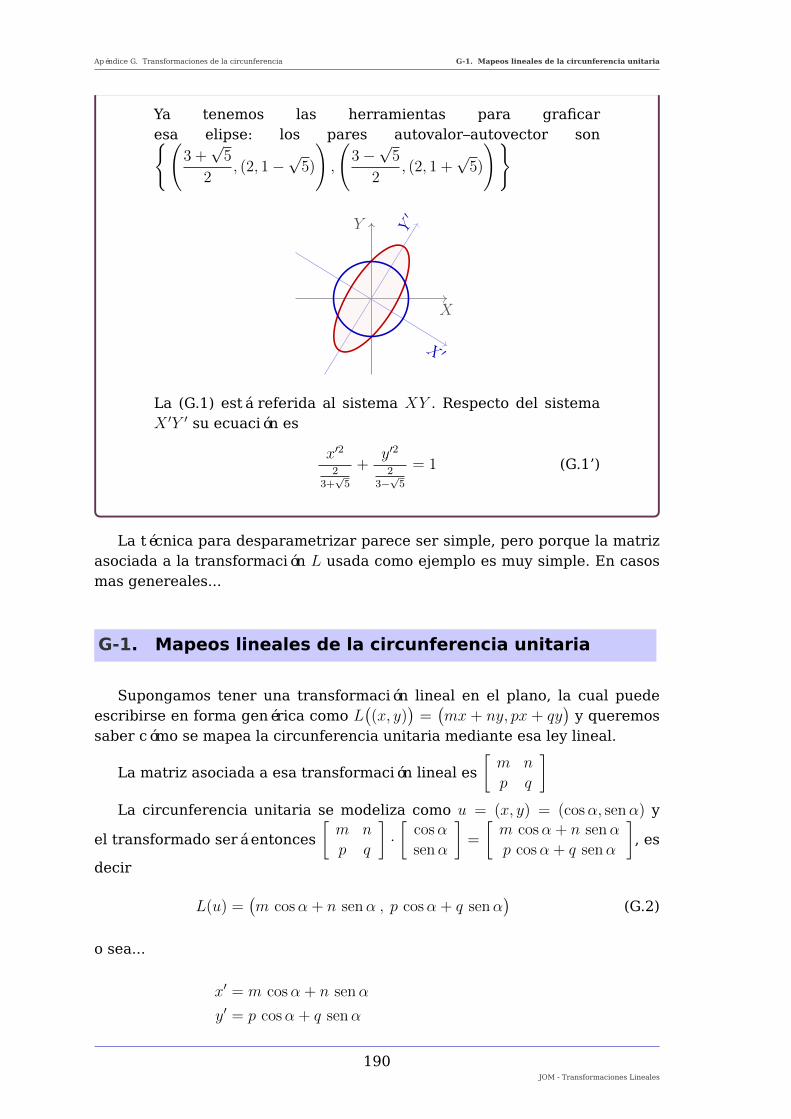
Apéndice G. Transformaciones de la circunferencia G-1. Mapeos lineales de la circunferencia unitaria
Ya tenemos las herramientas para graficaresa elipse: los pares autovalor–autovector son{(
3 +√
5
2, (2, 1−
√5)
),
(3−√
5
2, (2, 1 +
√5)
)}
X
Y
X ′
Y′
La (G.1) está referida al sistema XY . Respecto del sistemaX ′Y ′ su ecuación es
x′2
23+√5
+y′2
23−√5
= 1 (G.1’)
La técnica para desparametrizar parece ser simple, pero porque la matrizasociada a la transformación L usada como ejemplo es muy simple. En casosmas genereales...
G-1. Mapeos lineales de la circunferencia unitaria
Supongamos tener una transformación lineal en el plano, la cual puedeescribirse en forma genérica como L
((x, y)
)=(mx + ny, px + qy
)y queremos
saber cómo se mapea la circunferencia unitaria mediante esa ley lineal.
La matriz asociada a esa transformación lineal es
[m n
p q
]La circunferencia unitaria se modeliza como u = (x, y) = (cosα, senα) y
el transformado será entonces
[m n
p q
]·[
cosα
senα
]=
[m cosα + n senα
p cosα + q senα
], es
decir
L(u) =(m cosα + n senα , p cosα + q senα
)(G.2)
o sea...
x′ = m cosα + n senα
y′ = p cosα + q senα
190JOM - Transformaciones Lineales

G-1. Mapeos lineales de la circunferencia unitaria Apéndice G. Transformaciones de la circunferencia
de donde —excluyendo las transformaciones de proyecciones y otras—
x′2 = m2 cos2 α + n2 sen2 α + 2mn senα cosα (G.3)
y′2 = p2 cos2 α + q2 sen2 α + 2pq senα cosα (G.4)
x′y′ = mp cos2 α + nq sen2 α + (mq + np) senα cosα (G.5)
Desparametrizar la ec.(G.2) es muy complicado cuando uno no tiene lasherramientas adecuadas. Nosotros, después de canonizar una ecuación de se-gundo grado sí tenemos las herramientas adecuadas:
a11x′2 + a22y
′2 + 2a12x′y′ = c (G.6)
permite el tratamiento convencional con autovectores para llegar a una ecua-ción sobre ejes rotados, del tipo canónico.
Podemos re-escribir las ecuaciones (G.3)...(G.5) con una notación de vecto-res...
x′2 = (m2 , n2 , 2mn)
y′2 = (p2 , q2 , 2pq)
x′y′ = (mp , nq , mq + np)
donde la primera componente está multiplicada por un coseno cuadrado dealfa, la segunda componente se multiplica por un seno cuadrado de alfa, y latercera componente por el producto seno-coseno de alfa.
Aprovechando que c cos2 α+c sen2 α = c, podemos formar una «combinaciónlineal» de modo que se elimine la tercera componente.
Entonces la ec.(G.6) queda
a11(m2 , n2 , 2mn) + a22(p
2 , q2 , 2pq) + 2a12(mp , nq , mq + np) = (c, c, 0) (G.7)
Y esto arroja el sistema lineal m2 p2 2mp
n2 q2 2nq
2mn 2pq 2mq + 2np
· a11a22a12
=
c
c
0
(G.8)
M · S = C
Y si (G.8) tuviera solución, ya podríamos caracterizar la (G.6), y por tantoproceder a la identificación de la cónica resultante mediante el procedimientode canonización donde no existe la traslación del sistema de referencias.
wᵀAw = c⇒[x y
] [a11 a12a12 a22
] [x
y
]= c
JOM - Transformaciones Lineales
191

Apéndice G. Transformaciones de la circunferencia G-1. Mapeos lineales de la circunferencia unitaria
G-1.1. Caso 1: det(L) 6= 0, Elipse
Supongamos que los autovalores y autovectores que arroja la (G.6) conla solución de (G.8) son [λ1(v1) , λ2(v2) ] donde los autovectores son lineal-mente independientes; y que la matriz diagonalizante —de A— a usar es[V ] = [ v1 v2 ]. En ese caso la (G.6) deviene en
[x′′ y′′
] [λ1 0
0 λ2
] [x′′
y′′
]= c = λ1x
′′2 + λ2y′′2
canonizando queda
x′′2
cλ1
+y′′2
cλ2
= 1 (G.9)
En el caso que los signos de los autovalores y el de c sean iguales(1), la (G.9)quedará como
x′′2
a21+y′′2
a22= 1 (G.10)
donde ai =√
cλi
y la ecuación (G.10) será una elipse. Si además λ1 = λ2,
tendremos una circunferencia.
Vamos a dar dos ejemplos donde se utilice esta herramienta. El prime-ro con una transformación de rotación y escalamiento, y el segundo con unatransformación un poco más compleja.
G-1.1.1. Matriz asociada con autovalores complejos
Ejemplo G.1. Sea la transformación lineal de R2 → R2 |L1
((x, y)
)= (2x− y , x+
2y), encuentra la transformada (el mapeo) de la circunferencia unitaria.p
En este caso la matriz asociada es [L ] =
[2 −1
1 2
]=
[m n
p q
]. En la
ec.(G.8) tenemos que 4 1 4
1 4 −4
−4 4 6
· a11a22a12
=
c
c
0
(G.8”)
al resolverla tenemos que a11 = c/5, a22 = c/5, a12 = 0, con lo que haciendoc = 5 tenemos
L1(u) : x′2 + y′2 = 5
1Si existen y no son cero, serán del mismo signo
192JOM - Transformaciones Lineales

G-1. Mapeos lineales de la circunferencia unitaria Apéndice G. Transformaciones de la circunferencia
es decir, una circunferencia de radio√
5.
Y
X
P
P ′
y
G-1.1.2. Matriz asociada con autovalores reales
Ejemplo G.2. Sea la transformación lineal de R2 → R2 |L2
((x, y)
)= (2x+ y , x−
3y), encuentra la transformada (el mapeo) de la circunferencia unitaria.p
En este caso la matriz asociada es [L ] =
[2 1
1 −3
]=
[m n
p q
]. En la
ec.(G.8) tenemos que 4 1 4
1 9 −6
4 −6 −10
· a11a22a12
=
c
c
0
(G.8”’)
al resolverla tenemos que a11 = 2c/49, a22 = −3c/133, a12 = c/49, con loque haciendo c = 49 tenemos
L2(u) : 10x′2 + 5y′2 + 2x′y′ = 49
la cual tenemos que canonizar:
la matriz de coeficientes es [A ] =
[10 1
1 5
], cuyos autovalores y autovec-
tores son[15−√29
2 :(
2,−5−√
29), 15+
√29
2 :(
5 +√
29, 2) ]
es decir,
15−√
29
2x′′2 +
15 +√
29
2y′′2 = 49
aproximadamente
x′′2
3.19262+
y′′2
2.19262= 1
una elipse de semieje focal aproximadamente 3.19 sobre el eje dado por ladirección aproximada (1,−5.19), por aproximadamente 2.19 en la dirección
JOM - Transformaciones Lineales
193

Apéndice G. Transformaciones de la circunferencia G-1. Mapeos lineales de la circunferencia unitaria
normal (5.19, 1).
Y
X
P
P ′
y
Este es un caso donde los autovectores de la matriz asociada a la trans-formación lineal [L ] y los autovectores de la matriz de coeficientes [A ] sonnuméricamente iguales2, y no será normalmente así...
Ejemplo G.3. Sea la transformación lineal de R2 → R2 |L3
((x, y)
)= (2x , x−3y),
encuentra la transformada (el mapeo) de la circunferencia unitaria.p
En este caso la matriz asociada es [L ] =
[2 0
1 −3
]=
[m 0
p q
]. En la
ec.(G.8) tenemos que 4 1 4
0 9 0
0 −6 −12
· a11a22a12
=
c
c
0
(G.8””)
al resolverla tenemos que a11 = 5c/18, a22 = 2c/18, a12 = −c/18, con lo quehaciendo c = 18 tenemos
L3(u) : 5x′2 + 2y′2 − 2x′y′ = 18
la cual tenemos que canonizar:
la matriz de coeficientes es [A ] =
[5 −1
−1 2
], cuyos autovalores y auto-
vectores son
2Recordemos que los ejes principales son los autovectores de la matriz de los coeficientes.
194JOM - Transformaciones Lineales
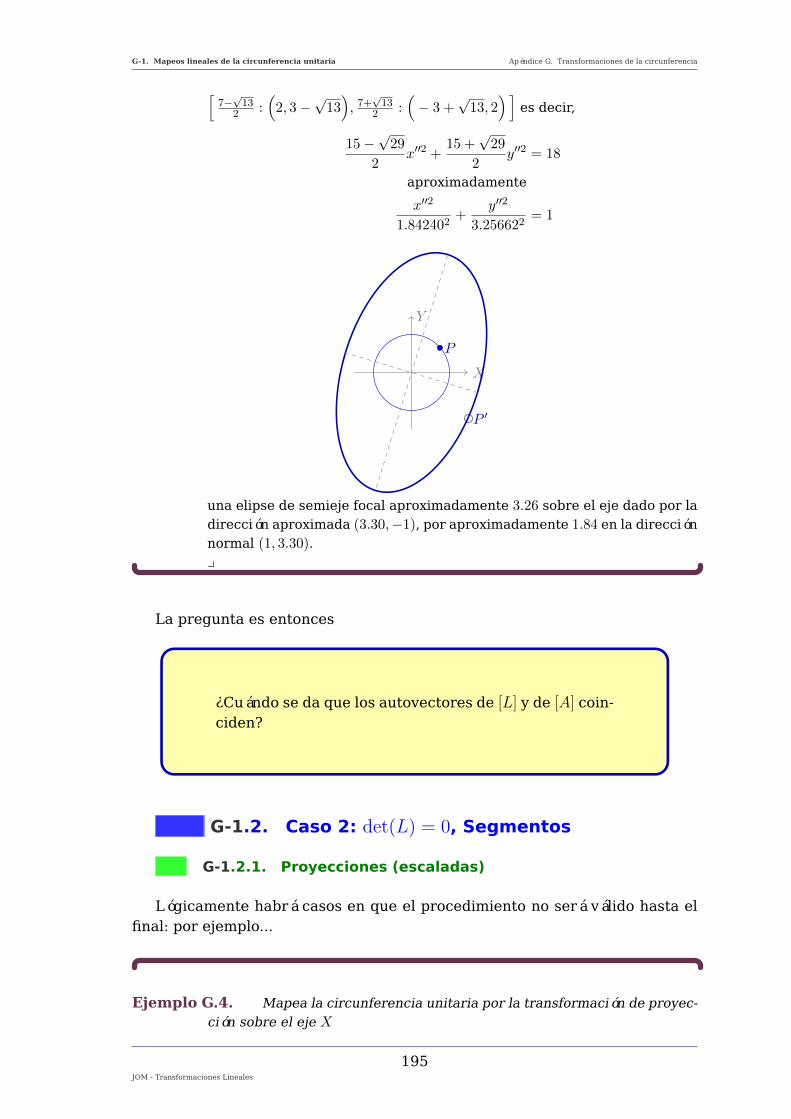
G-1. Mapeos lineales de la circunferencia unitaria Apéndice G. Transformaciones de la circunferencia
[7−√13
2 :(
2, 3−√
13), 7+√13
2 :(− 3 +
√13, 2
) ]es decir,
15−√
29
2x′′2 +
15 +√
29
2y′′2 = 18
aproximadamente
x′′2
1.842402+
y′′2
3.256622= 1
X
Y
P
P ′
una elipse de semieje focal aproximadamente 3.26 sobre el eje dado por ladirección aproximada (3.30,−1), por aproximadamente 1.84 en la direcciónnormal (1, 3.30).y
La pregunta es entonces
¿Cuándo se da que los autovectores de [L] y de [A] coin-ciden?
G-1.2. Caso 2: det(L) = 0, Segmentos
G-1.2.1. Proyecciones (escaladas)
Lógicamente habrá casos en que el procedimiento no será válido hasta elfinal: por ejemplo...
Ejemplo G.4. Mapea la circunferencia unitaria por la transformación de proyec-ción sobre el eje X
JOM - Transformaciones Lineales
195
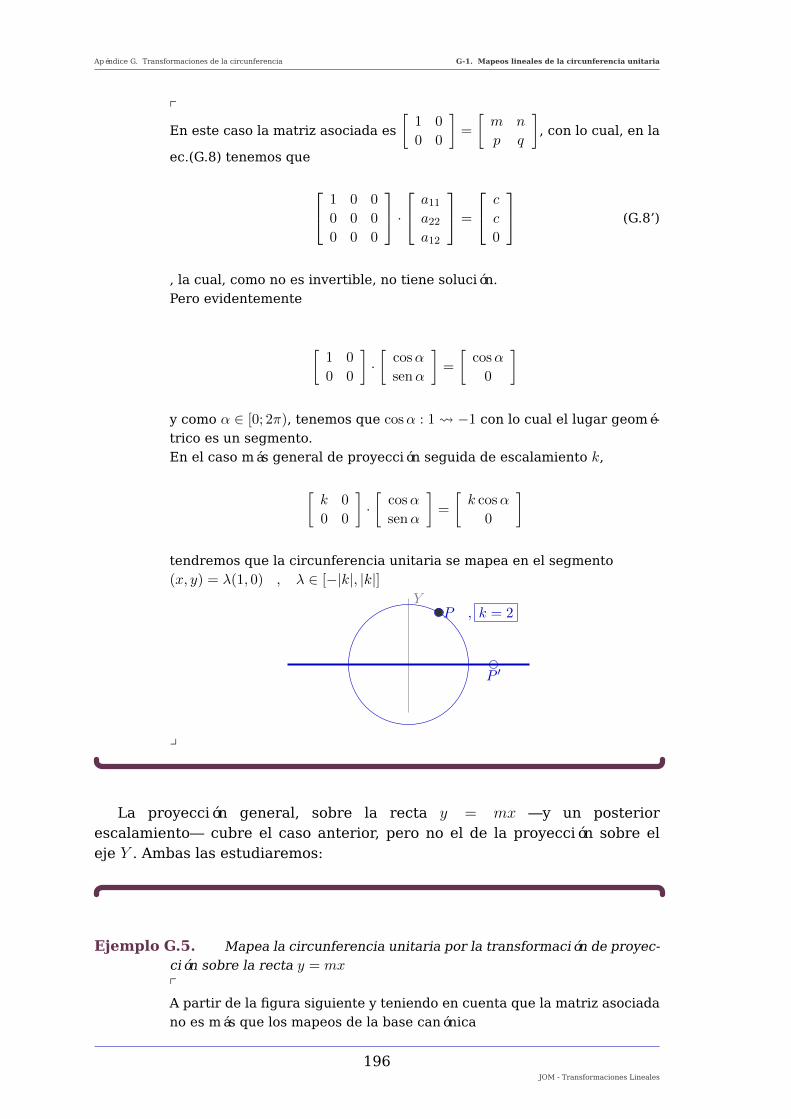
Apéndice G. Transformaciones de la circunferencia G-1. Mapeos lineales de la circunferencia unitaria
p
En este caso la matriz asociada es
[1 0
0 0
]=
[m n
p q
], con lo cual, en la
ec.(G.8) tenemos que
1 0 0
0 0 0
0 0 0
· a11a22a12
=
c
c
0
(G.8’)
, la cual, como no es invertible, no tiene solución.Pero evidentemente
[1 0
0 0
]·[
cosα
senα
]=
[cosα
0
]
y como α ∈ [0; 2π), tenemos que cosα : 1 −1 con lo cual el lugar geomé-trico es un segmento.En el caso más general de proyección seguida de escalamiento k,
[k 0
0 0
]·[
cosα
senα
]=
[k cosα
0
]
tendremos que la circunferencia unitaria se mapea en el segmento(x, y) = λ(1, 0) , λ ∈ [−|k|, |k|]
YP , k = 2
P ′
y
La proyección general, sobre la recta y = mx —y un posteriorescalamiento— cubre el caso anterior, pero no el de la proyección sobre eleje Y . Ambas las estudiaremos:
Ejemplo G.5. Mapea la circunferencia unitaria por la transformación de proyec-ción sobre la recta y = mx
pA partir de la figura siguiente y teniendo en cuenta que la matriz asociadano es más que los mapeos de la base canónica
196JOM - Transformaciones Lineales
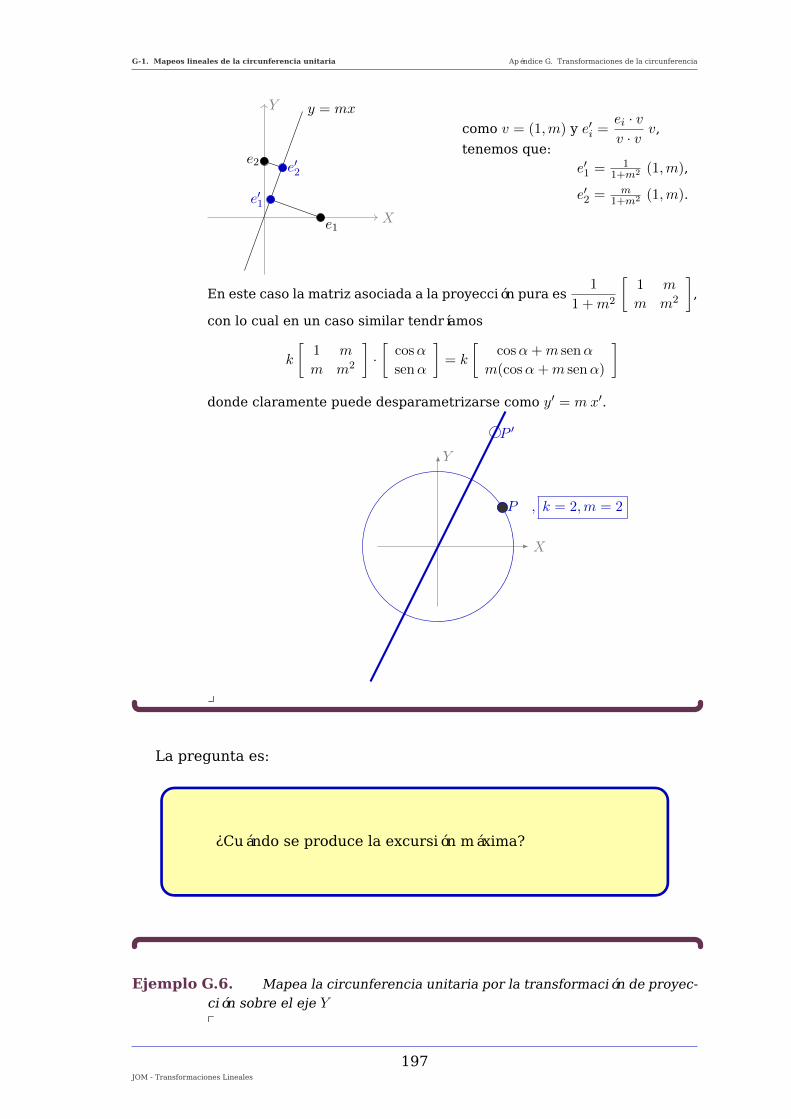
G-1. Mapeos lineales de la circunferencia unitaria Apéndice G. Transformaciones de la circunferencia
X
Y y = mx
e1
e2
e′1
e′2
como v = (1,m) y e′i =ei · vv · v
v,
tenemos que:e′1 = 1
1+m2 (1,m),
e′2 = m1+m2 (1,m).
En este caso la matriz asociada a la proyección pura es1
1 +m2
[1 m
m m2
],
con lo cual en un caso similar tendríamos
k
[1 m
m m2
]·[
cosα
senα
]= k
[cosα+m senα
m(cosα+m senα)
]donde claramente puede desparametrizarse como y′ = m x′.
Y
X
P , k = 2,m = 2
P ′
y
La pregunta es:
¿Cuándo se produce la excursión máxima?
Ejemplo G.6. Mapea la circunferencia unitaria por la transformación de proyec-ción sobre el eje Yp
JOM - Transformaciones Lineales
197
Apéndice G. Transformaciones de la circunferencia G-1. Mapeos lineales de la circunferencia unitaria
En este caso la matriz asociada a la proyección pura es1
1 +m2
[0 0
0 1
],
con lo cual en un caso similar tendríamos[0 0
0 k
]·[
cosα
senα
]= k
[0
k senα
]que arroja el segmento (x, y) = k(0, 1) , k ∈ [−1, 1]
y
La pregunta es ahora:
¿Las proyecciones y posterior expansión o compresiónson las únicas transformaciones que mapean una cir-cunferencia en un segmento?
¿Puedes averiguar en qué condiciones de [L] no es po-sible resolver la (G.8)?
Anexo al apéndice
En forma genérica...
La solución depende del determinante
Respecto de los determinantes de L y M puede verificarse3 que
det(M) = 2 · det(L)3 = 2 · (m q − n p)3
de donde es inmediato que det(L) = 0 ⇔ det(M) = 0 y como consecuencia(G.8) tendrá una solución solamente cuando det(L) 6= 0.
3Está demás decir que det3 [L ] = det(L)3
198JOM - Transformaciones Lineales

G-1. Mapeos lineales de la circunferencia unitaria Apéndice G. Transformaciones de la circunferencia
Y con ello de la inversa de M
La solución de la (G.8) es S = M−1 · C, después de algunas cuentas esa11a22a12
=c
det2(L)
q2 + p2
n2 +m2
−n q −mp
Tenemos la ecuación de la elipse
Por tanto si hacemos c = (mq − n p)2 podemos escribir directamente
(q2 + p2)x′2 − 2(n q +mp)x′y′ + (n2 +m2)y′2 = 1
como la ecuación de la elipse a canonizar.
Y con el cambio de base
La matriz
[A ] =
[q2 + p2 −n q −mp
−n q −mp n2 +m2
]=
[a11 a12a12 a22
]es la que contiene los autovectores y autovalores que definen los parámetrosde la elipse.
Podemos probar que
det ([A ]) = det2 ([L ])
y si
k =√
(a22 − a11)2 + 4a212
entonces:
λ1 =a22 + a11 − k
2, λ2 =
a22 + a11 + k
2
v1 = (2a12 , a22 − a11 − k) , v2 = (2a12 , a22 − a11 + k)
de donde puede probarse claramente que v1 ⊥ v2 ya que el producto escalares nulo.
Obtenemos los semiejes y sus direcciones
En la ecuación de la elipse girada tenemos:
λ1x2 + λ2y
2 = 1, x : v1 , y : v2
JOM - Transformaciones Lineales
199
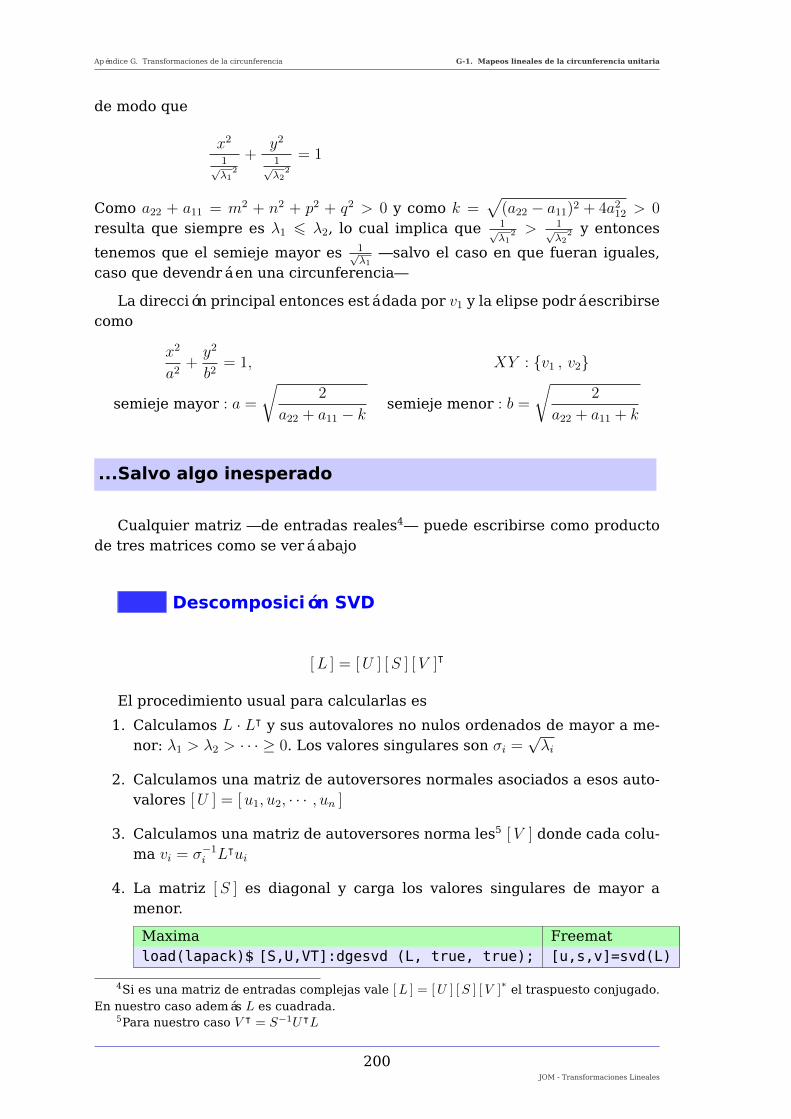
Apéndice G. Transformaciones de la circunferencia G-1. Mapeos lineales de la circunferencia unitaria
de modo que
x2
1√λ1
2
+y2
1√λ2
2
= 1
Como a22 + a11 = m2 + n2 + p2 + q2 > 0 y como k =√
(a22 − a11)2 + 4a212 > 0
resulta que siempre es λ1 6 λ2, lo cual implica que 1√λ1
2 > 1√λ2
2 y entonces
tenemos que el semieje mayor es 1√λ1
—salvo el caso en que fueran iguales,caso que devendrá en una circunferencia—
La dirección principal entonces está dada por v1 y la elipse podrá escribirsecomo
x2
a2+y2
b2= 1, XY : {v1 , v2}
semieje mayor : a =
√2
a22 + a11 − ksemieje menor : b =
√2
a22 + a11 + k
...Salvo algo inesperado
Cualquier matriz —de entradas reales4— puede escribirse como productode tres matrices como se verá abajo
Descomposición SVD
[L ] = [U ] [S ] [V ]ᵀ
El procedimiento usual para calcularlas es
1. Calculamos L · Lᵀ y sus autovalores no nulos ordenados de mayor a me-nor: λ1 > λ2 > · · · ≥ 0. Los valores singulares son σi =
√λi
2. Calculamos una matriz de autoversores normales asociados a esos auto-valores [U ] = [u1, u2, · · · , un ]
3. Calculamos una matriz de autoversores norma les5 [V ] donde cada colu-ma vi = σ−1i Lᵀui
4. La matriz [S ] es diagonal y carga los valores singulares de mayor amenor.
Maxima Freematload(lapack)$ [S,U,VT]:dgesvd (L, true, true); [u,s,v]=svd(L)
4Si es una matriz de entradas complejas vale [L ] = [U ] [S ] [V ]∗ el traspuesto conjugado.
En nuestro caso además L es cuadrada.5Para nuestro caso V ᵀ = S−1UᵀL
200JOM - Transformaciones Lineales

G-1. Mapeos lineales de la circunferencia unitaria Apéndice G. Transformaciones de la circunferencia
El orden de todas las columnas lo definen los autovalores de [LᵀL ], queentran en [S ] de mayor a menor.
Comoquiera que sea, [S ]u puede verse como [U ] [S ] ([V ]ᵀ XY ) donde yase ve que si XY carga con los vectores normales que definen la circunferenciaunitaria, ([V ]ᵀ XY ) puede verse como una rotación —y posible reflexión— deesos ejes mientras que la circunferencia sigue inmutable.
Luego [S ] ([V ]ᵀ XY ) puede verse como una segunda transformación quedistorsiona los ejes de la circunferencia y la vuelve una elipse.
Finalmente [U ] [S ] ([V ]ᵀ XY ) puede verse como otra transformación querota —y posiblemente haga una reflexión de— esa elipse anterior
G-1.2.2. ejemplo
Repetimos el ejemplo G.3
Ejemplo G.7. Sea la transformación lineal de R2 → R2 |L3
((x, y)
)= (2x , x−3y),
encuentra la transformada (el mapeo) de la circunferencia unitaria.p
En este caso la matriz asociada es [L ] =
[2 0
1 −3
]=
[m 0
p q
]. En este
caso
[LLᵀ ] =
[4 2
2 10
],{
(7−√
13, (−3, 2−√
13)), (7 +√
13, (−3, 2 +√
13))}
De donde
[S ] =
[ √7 +√
13 0
0√
7−√
13
]≈[
3.25662 0
0 1.84240
]
[U ] =
2√
4+(3+√13)2
2√4+(3−
√13)2
3+√13√
4+(3+√13)2
3−√13√
4+(3−√13)2
≈[
0.28978 0.95709
0.95709 −0.28978
]
Ésta es una matriz de reflexión alrededor del eje X seguida de una rota-ción —73.15°—, con lo que sería mejor que la transforme en rotación puracambiando el sentido del segundo vector6 de esa manera
[U ] =
2√
4+(3+√13)2
−2√4+(3−
√13)2
3+√13√
4+(3+√13)2
−3+√13√
4+(3−√13)2
≈[
0.28978 −0.95709
0.95709 0.28978
]
[U ] será una reflexión alrededor del eje X seguidauna rotación pura de73.15°. Entonces
[V ᵀ ] ≈[
0.47186 −0.88167
−0.88167 −0.47186
](G.11)
6 ya que
[a bb −a
] [1 00 −1
]=
[a −bb a
]unClase.tex calls ../libros/algebra/M8/mapeo-circunit
JOM - Transformaciones Lineales
201
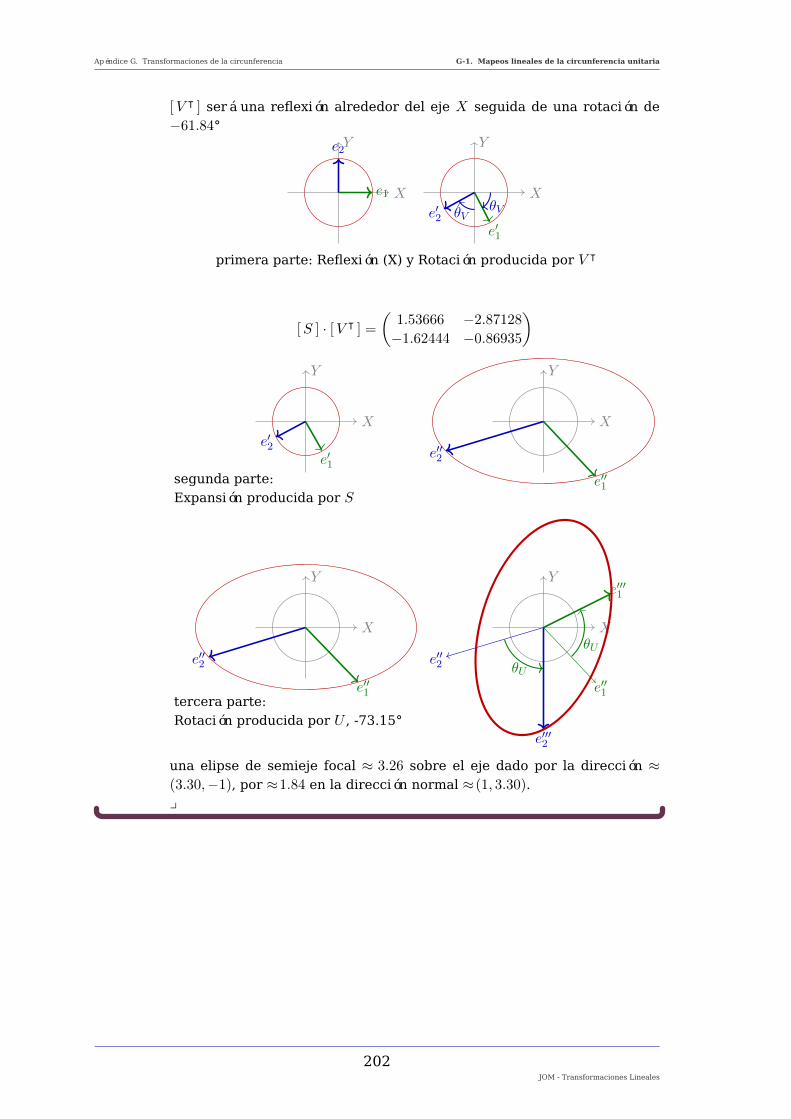
Apéndice G. Transformaciones de la circunferencia G-1. Mapeos lineales de la circunferencia unitaria
[V ᵀ ] será una reflexión alrededor del eje X seguida de una rotación de−61.84°
X
Y
e1
e2
X
Y
e′1
e′2 θVθV
primera parte: Reflexión (X) y Rotación producida por V ᵀ
[S ] · [V ᵀ ] =
(1.53666 −2.87128
−1.62444 −0.86935
)
X
Y
e′1
e′2
segunda parte:Expansión producida por S
X
Y
e′′2
e′′1
tercera parte:Rotación producida por U , -73.15°
X
Y
e′′2
e′′1
X
Y
e′′2
e′′1
θU
θU
e′′′2
e′′′1
una elipse de semieje focal ≈ 3.26 sobre el eje dado por la dirección ≈(3.30,−1), por ≈1.84 en la dirección normal ≈(1, 3.30).y
202JOM - Transformaciones Lineales

Apéndice H
Ejercitaciones
Resumen:
La estructura de cada uno de los Trabajos Prác-ticos incluye los Objetivos y Recomendaciones. Me-jor es que los resuelvas a todos. En un principiopodrías trabajar de la manera siguiente: asegúra-te de calcular todos los ejercicios numéricos, y lue-go intenta con los ejercicios conceptuales. Como unrepaso trata de resolver nuevamente los ejerciciosnuméricos tratando de aplicar los conceptos. Estaes una técnica que garantiza resultados de excelen-cia en la comprensión de los temas. Para laborato-rios disponibles, solicítalos a la dirección de correo-e, mailto:[email protected].
203

Apéndice H. Ejercitaciones H-1. Rectas, Planos y Espacios Lineales
H-1.Rectas, Planos y Espacios Lineales . . . . . . . . . . . . . . . . . . 204
H-2.Transformaciones Lineales. Matriz asociada vs Ley . . . . . . . . 206
H-3.Isometrías en el Plano y el espacio . . . . . . . . . . . . . . . . . . 211
H-4.Valores y Vectores Propios de Matrices n× n . . . . . . . . . . . . 215
H-5.Cambios de Base y Transformaciones Lineales . . . . . . . . . . . 218
H-6.Canonización de Cónicas y Cuádricas . . . . . . . . . . . . . . . . 221
H-7.Ejemplo de examen . . . . . . . . . . . . . . . . . . . . . . . . . . . 223
H-8.Una palabra para compartir con profesores . . . . . . . . . . . . 225
H-1. Rectas, Planos y Espacios Lineales
Objetivo:Este es un práctico que combina elementos que a estaaltura del curso, se deben conocer. Sin embargo hayalgunos ejercicios que piden una demostración, en estoscasos lo que se espera es que se piense detenidamenteen el mismo, se plantee una propuesta para resolverlo yque se haga la consulta pertinente. Estos temas ya estánfuera de evaluación; se ponen aquí simplemente como unaayuda de modo que el alumno sepa en qué momento re-leeralgunos temas de los módulos anteriores para aprovecharmejor los contenidos actuales.-
1. Modifica la ecuación vectorial paramétrica de una recta en el plano paraque puedas representar la ecuación cartesiana paramétrica de una rectaen el plano.
2. Expresa la ecuación de la recta anterior en la forma compacta (formamatricial) —mediante un vector genérico donde la/s variable/s libres apa-recen en primer lugar—.
3. La expresión|d||n|
= δ —pág.12—, ¿describe también la distancia de una
recta al origen en el plano?¿Cómo, o debes modificarla?
4. Referido al ejercicio anterior, demuestra que en el caso de una recta enel plano puede usarse para la distancia al origen, la expresión
N =P · uu2
u
donde si u =
[u1u2
]⇒ u =
[−u2u1
].
Ayuda : Bosqueja todo en un gráfico, analiza que u ⊥ u seguramentedeberás lidiar con un SEL de 2x2
204JOM - Transformaciones Lineales

H-1. Rectas, Planos y Espacios Lineales Apéndice H. Ejercitaciones
5. Especifica si las expresiones son Verdaderas o Falsas
a) Para A = {λu | u ∈ R2 }, A es1) el Espacio vectorial generado por u
2) una recta en el espacio
3) una recta en el plano
b ) Si u ∈ R3, entonces dim ({λu}) = 2
c) r = P + λr u y s = Q+ λs v son coincidentes si u = k1v = k2PQ
d ) r = P + λ PQ , λ ∈ [0, 1] implica que r es :1) el segmento PQ
2) la recta dada por P y Q
6. Escribe la recta en forma matricial
a-
[1
2
]+ λ
[−3
1
]b-
x− 1
2= y − 2; z = 0
c- y = 5x− 4 d-
1
2
−1
+ λ
−3
1
2
7. Escribe el plano en forma matricial
a-
1
2
5
+ λ
−3
1
0
− µ 3
1
2
b- 2x+ 3y− z = 6 c- y = 5x− 4
d- dado por 3 puntos : e- z = 2
(1, 2, 3) , (4,−3, 0) , (0, 0, 1)
JOM - Transformaciones Lineales
205

Apéndice H. Ejercitaciones H-2. Transformaciones Lineales. Matriz asociada vs Ley
H-2. Transformaciones Lineales. Matriz asociada vs Ley
Objetivo:Este es un práctico que en donde se fijan la habilidadpara detectar cuáles transformaciones entre espaciosson lineales y cuales no, para hallar la ligaduraentre las matrices asociadas a las transformacioneslineales y éstas, y la habilidad para aplicar las pocaspropiedades para describir una transformación linealde diferentes maneras cuando se la define ya sea por ladefinición de la ley, por su matriz asociada o por unconjunto de vectores de los cuales se conoce lo que latransformación lineal les hace.-
1. Dada la transformación T1 ((x, y)) = (2x− y , x+ y )
a- Identifica V y W
b- Halla los vectores transformados de v1 = (2, 3) , [v2] =
[−1
1
]c- Representa gráficamente los vectores v1, v2 y sus transformados w1 yw2 (o v′1, v
′2) respectivamente
2. A- Repite el ejercicio anterior para las transformaciones y los vectoresque figuran abajo. Representa sólo en casos del plano
Transformación v1 = [v2] =
a-T2 ((x, y)) =
= (2x− y , x+ y , y − x).
(2, 3)
[−1
1
]
b- T3 ((x, y)) = (2x− y )
.
(2, 3)
[−1
1
]
c- T4
([a c
b d
])= (2a− b, c+ d )
[1 3
2 4
] −1
1
3
4
e- T5 (x) = x2 + 1
.1 [−1]
f- T6 ((x, y)) = (2x+ 1 , y)
.
(2, 3)
[−1
1
]B- Prueba la linealidad o nó de T1...T6
3. Prueba que para cualquier transformación lineal L (v) = w
a- L (0 · v) = 0 · w b- L (−v) = −wc- L (av + bu) = aw + bL (u)
206JOM - Transformaciones Lineales

H-2. Transformaciones Lineales. Matriz asociada vs Ley Apéndice H. Ejercitaciones
4. Prueba que
L (αu+ βv) = αL (u) + βL (v)
reemplaza a L (u+ v) = L (u) + L (v)
L (k v) = k L (v)
sólo para las transformaciones lineales
5. Probar la linealidad de T : F → R | T (f) =1∫0
f (x) dx
(Se necesita haber cursado el módulo M71)
6. Prueba la no linealidad de todas las transformaciones del ejercicio 2, denuevo pero con contraejemplos
7. Para T6 , T7 ((x, y)) = (1− x+ y, x2 − x− y) y T1, mapea el cuadrado uni-tario.Para el caso no lineal, toma una aproximación de diez puntos intermediospara cada lado del cuadrado.
8. Para ambos casos, caracteriza el cuadrado unitario como una funciónparamétrica por trozos, y su transformado de la misma manera y con elmismo parámetro.
9. Respecto del ejercicio anterior, suponiendo que las transformaciones sonR2 → R2, establece si una trasformación donde se sufra una traslaciónes lineal o no.¿Y una rotación ?
10. Analiza el significado geométrico que se le puede atribuir a las siguientestransformaciones en el plano.Ayuda: Puedes mapear el cuadrado unitario o varios vectores, la idea esque hagas varias transformaciones para que te des cuenta qué es lo quela ley hace. Si puedes analizarlo sin hacer los dibujitos, has logrado unpaso muy importante: la abstracción.a- b-
Ta
([x
y
])=
[0
0
]Tb
([x
y
])=
[y
x
]e- f-
Te
([x
y
])=
[2x
y
]Tf
([x
y
])=
[0
y
]1Que F = C(0 ,1) sea el conjunto de las funciones continuas en el intervalo (0, 1) , de lo
contrario puede que deba referirse a otro tipo de integral distinta a la de Riemman que semaneja en M7.
JOM - Transformaciones Lineales
207

Apéndice H. Ejercitaciones H-2. Transformaciones Lineales. Matriz asociada vs Ley
c- d-
Tc
([x
y
])=
[x
0
]Td
([x
y
])=
[−xy
]g- h-
Tg
([x
y
])=
[x
2y
]Th
([x
y
])=
[2x
2y
]11. Cómo escribirías una transformación que a un vector del plano le corres-
ponda un polinomio de grado hasta 3 en la que el término independientese corresponde con la segunda componente del vector, el coeficiente deltérmino lineal es la suma de las componentes, el término cuadrático escero, y el coeficiente del término cúbico es la primera componente delvector. Llama a esta transformación T8.Por favor, no continúes sin resolver este ejercicio
12. Respecto de los ejercicios anteriores, ¿Son T7 y T8 lineales ?
13. Demuestra que una TL de R3 → R3 mapea planos en planos. Discutealgún caso en particular donde esto no se diera.
14. Halla las matrices asociadas a todas las transformaciones lineales defini-das hasta ahora, interésate especialmente por las Ta a la Th
15. ¿De qué dimensión debe ser la matriz asociada a una TL que mapeaelementos de un espacio de dimensión 10 a un espacio de dimensión 12?
16. En cada casoA- determina [T ], la matriz asociada a la TL T yB- verifica con el elemento cuyas coordenadas sobre base canónica es
[v] =
1
1
1
T
x
y
z
= casos a-b-c-d-
a- b- c- d- x
2y
3z
x+ y
6y − z3x+ 2y + 4z
[x+ y
6y − z
][x+ y]
17. Grafica el transformado del cubo unitario en los siguientes casos
T
x
y
z
= casos a-b-c-d-
a- b- c- d- x
2y
3z
x+ y
6y − z3x+ 2y + 4z
x
x+ y
0
x+ y
0
y + z
208
JOM - Transformaciones Lineales

H-2. Transformaciones Lineales. Matriz asociada vs Ley Apéndice H. Ejercitaciones
para el cubo unitario utiluza la matriz
0 1 1 0 0 0 1 1
0 0 1 1 1 0 0 1
0 0 0 0 1 1 1 1
18. Aplica la transformación Tc definida abajo a las siguientes rectas y grafi-
ca la recta y su respectivo transformado
Tc
([x
y
])=
[−xy
]a- b- c- d-[x
2x
] [2 + λ
1 + λ
] [2 + 3λ
−2λ
]y = 3− 2x
19. Aplica la transformación T definida abajo a los siguientes planos y graficael plano y su respectivo transformado
T
x
y
z
=
−2x
y
y + z
a- b- c- x
y
0.5− x− y
3 + 2λ− µ−1− 3λ+ 2µ
2 + λ− µ
x+ 2y − z = 4
20. Halla una TL que mapee(a) la recta y = x− 1 en la recta y = 2x+ 1 y luego
(b) la misma recta
[x
2x+ 1
]en la recta
[x
3− x
](c) Halla las matrices asociadas T1 y T2 respectivamente(d) Verifica que la transformación dada por la matriz T3 = T2 T1 mapea larecta y = x− 1 directamente en la recta y = 3− x
21. Halla las leyes de las TL que se dan mediante sus matrices asociadasa- b- c-
[Ti] =
[1 −4
−4 3
] 0 1 −1
2 4 0
0 0 3
[0 1 −1
0 0 3
]sabiendo que todas son transformaciones de Rn → Rm
22. Halla las leyes de las TL que se dan mediante el mapeo de un conjuntode vectores Ti ({A}) = {B}
a- b-A = {(1, 2) , (−3, 1)}
B = {(2, 1) , (1,−3)}
A = {(0, 2, 0) , (1, 4, 0) , (−1, 0, 3)}
B = {(2, 1) , (1,−3) , (1, 2)}sabiendo que ambas son transformaciones de Rn → Rm
23. Si se sabe que Ui es una TL, halla la imagen de los vectores que faltan
JOM - Transformaciones Lineales
209
Apéndice H. Ejercitaciones H-2. Transformaciones Lineales. Matriz asociada vs Ley
a-
U1 ((1, 2)) = (−1, 0, 2)
U1 ((2, 1)) = (0, 2, 1)
b-
U2 ((1, 2)) = 1
U2 ((2, 1)) = −3
Ui ((−3, 1)) = Ui ((3, 3)) =
Ui ((0, 4)) = Ui ((6, 6)) =
,El cuadrado
unitario
24. Halla, si existe, la TL que verifique...a- f ((1, 0, 0)) = 0 , f ((1,−1, 0)) = 0 , f ((0, 1, 2)) = 1
b- f ((1, 0)) = (2, 1) , f ((1, 1)) = (1, 4) , f ((3, 1)) = (0,−2)
... o cambia una —sólo una por caso— imagen para que sí se verifique.
25. Demuestra que el mapeo lineal de un subespacio es otro subespacio.(muy importante)
26. Muestra que el mapeo de una base en un espacio, no es en general unabase en el otro espacio
27. ¿Cuáles serían las condiciones para que lo anterior, sí se cumpla?
210JOM - Transformaciones Lineales

H-3. Isometrías en el Plano y el espacio Apéndice H. Ejercitaciones
H-3. Isometrías en el Plano y el espacio
Objetivo:Este es un práctico que en donde se fijan la habilidadpara detectar cuáles transformaciones entre espaciosson isométricas y cuales no; para distinguir que susmatrices asociadas son ortogonales, con aplicacionesa la geometría plana, donde se incorporan relacionestrigonométricas conocidas en la parte A.2.-Una vez terminado el ejercicio debes preguntarte quéhas hecho, cómo lo has hecho y porqué. Pregúntatetambién si había otras maneras alternativas de hacerloy cuál hubiese sido el procedimiento más sencillo ycuál hubiera sido el que involucra menos cuentas y másrazonamiento; y fundamentalmente: ¿Hay algo genérico oparticular que puedas aprovechar a partir del ejercicioque acabas de resolver?Analizar el resultado es más importante que resolverbién el ejercicio.
1. Verifica si las TL Ti : R2 → R2 dadas de la forma
Ti
([x
y
])=
[?
??
]son o no isométricas
a- c- 0
0
15
x+ 2y
2x+ 4y
b- d- −y
x
x cos 30− y sin 30
y cos 30 + x sin 30
2. Verifica que si las anteriores transformaciones lineales son isométricas,
sus respectivas matrices asociadas son ortogonales
3. Demuestra que si la matriz asociada [G] a una una TL G : V → V esortogonal, si dos elementos del dominio son perpendiculares entre sí,también sus imágenes serán perpendiculares entre sí.
4. Referido al ejercicio anterior: Demuestra también que la imagen de unabase ortonormal, es otra base ortonormal.
5. Halla, a partir del ejercicio 1, tres composiciones de transformacioneslineales posibles, y comprueba la relación existente entre las matrices
JOM - Transformaciones Lineales
211

Apéndice H. Ejercitaciones H-3. Isometrías en el Plano y el espacio
asociadas. ¿Es esto una constante para las transformaciones lineales osólo para las isométricas?. Justifica.
6. Demuestra que la rotación
[cosα − sinα
sinα cosα
]es una isometría tomando
los módulos del vector v y de su transformado v′ , y verificando que seaniguales.
Qué puedes decir de
[cosα − cosα
sinα sinα
]?
7. Halla el ángulo de la rotación en grados dada por[ √22−√22√
22
√22
]por inspección.
Grafica el vector (4, 3) y su transformado
8. Halla el ángulo de la rotación en grados dada por[0. 8 0. 6
−0. 6 0. 8
]hallando por ejemplo el ángulo entre (4, 3) y su transfor-
mado, o directamente por inspección y uso de las relaciones trigonomé-tricas inversas.Ayuda : recuerda el producto escalar (4, 3) · T ((4, 3)) y luego grafica paraencontrar el signo del ángulo.
9. Rota el punto de coordenadas (3, 4), un ángulo de 45°. Verifica gráfica-mente. Verifica que es una isometría mediante la inspección de su matrizasociada.
10. Determina la matriz asociada a la rotación que lleve el punto (3, 4) hastasu simétrico respecto de la recta y = x. Verifícalo gráficamente.
11. Determina la matriz asociada a la reflexión que lleve el punto (3, 4) hastasu simétrico respecto de la recta y = x. Verifícalo gráficamente.
12. Compara y discute los dos resultados anteriores; particularmente en loque se refiere a qué cosa hace cada una de ellas y porqué son distintas.(sólo coincidirán al mapear un vector colineal con (3, 4) )Verifica la afirmación anterior transformando el vector (4, 3)
13. Determina las matrices asociadas a las rotaciones que llevan un puntodel plano hasta su simétrico respecto de la recta y = x. Verfica gráfica-mente.Nota: Para cada punto del plano, hay una matriz de rotación.
14. Rota la recta y = 2x un ángulo de 60◦ contrareloj mediante una TL. Veri-fícalo gráficamente.Compruébalo también analíticamente que usando
tan (α + 60◦) =tan (α) + tan (60◦)
1− tan (α) tan (60◦)
212JOM - Transformaciones Lineales
H-3. Isometrías en el Plano y el espacio Apéndice H. Ejercitaciones
y haciendo tan (α) = m = 2 la pendiente de la recta rotada 60◦ contrare-loj, será
m′ = tan (α + 60◦) =2 +√
3
1− 2√
3≈ −1. 5146
15. Repite el ejercicio anterior con la recta y = −3x + 3 un ángulo de 30◦ areloj.
16. Rota la recta y =1
2x+ 1 un ángulo tal que quede paralela
a) al eje de abscisas.
b ) al eje de ordenadas.
c) a la recta y = −3x+ 1
17. Rota el vector (3, 4) un ángulo de−30o y luego al transformado, un ángulode 45◦. Comprueba que la matriz asociada es igual a una trasnformaciónde rotación de 15◦. Es decir que el producto de las matrices asociadas.R−30+45 = R15
18. Verifica si es importante el orden de las matrices anteriores. Ten en cuen-ta que se está rotando siempre respecto de un mismo eje normal al planoque contiene al origen.
19. Prueba que la matriz de rotación Rα+β = Rα ·Rβ (donde ambas son ro-taciones en el plano o rotaciones en el espacio alrededor de un mismoeje)
20. Rota el vector (3, 4) un ángulo de −30o y luego aplícale la transformaciónT ((x, y)) = (x− y , 2x+ y)
a) Calcula la matriz asociada a la transformación que hace esas doscosas a la vez.
b ) Comprueba que es igual al producto ordenado de las matrices aso-ciadas.
c) Verifica si es importante el orden de las matrices anteriores.
21. Respecto de los ejercicios anteriores (desde 17). Estás en condiciones dearticular verbalmente lo que ocurre en el plano y dos rotaciones; y en elplano y dos transformaciones que no son ambas rotaciones.
22. Rota el plano x+y+z = 1 un ángulo de 30◦ alrededor del eje X y luego unangulo de −60◦ alrededor del eje Z. Halla la ecuación general del planoresultante.
23. Repite el ejercicio anterior pero para el planox
3+y
4+z
5= 1.
24. Rota el mismo plano anterior de tal manera que quede paralelo
JOM - Transformaciones Lineales
213
Apéndice H. Ejercitaciones H-3. Isometrías en el Plano y el espacio
a) al eje X. b ) a uno de los planos coordenados.
Analiza gráficamente los resultados.
25. Analiza si en el espacio R3 la matriz asociada a la composición de dosrotaciones puede expresarse por el producto de las matrices asociadasa cada rotación sin importar el orden. Verbalizarlo como en el caso delplano. —Ten en cuenta el resultado del ej.21—.
214JOM - Transformaciones Lineales

H-4. Valores y Vectores Propios de Matrices n× n Apéndice H. Ejercitaciones
H-4. Valores y Vectores Propios de Matrices n× n
Objetivo:Este es un práctico que en donde se enfatiza sobre lascaracterísticas de una matriz cuadrada, que van a tenersuma importancia en la descripción de transformacioneslineales o afines. Se calculan los autovalores yautovectores de las matrices cuadradas.Una vez terminado el ejercicio debes preguntarte --yresponderte lo más detalladamanete posible-- qué hashecho, y cómo, y fundamentalmente: ¿hay algo genérico oparticular que pueda aprovechar a partir del ejercicioque acabo de resolver? Analizar el resultado es másimportante que resolver bien el ejercicio.
1. Cuántos autovalores tendrá una matriz cuadrada An×n? Discútelo a laluz del polinomio característico y el teorema fundamental del álgebraque establece cuántas raíces tiene un polinomio según fuere su orden.
2. Prueba que las matrices simétricas tienen autovalores reales. Hazlo paraun caso particular: un caso general de matriz de 2 × 2 simétrica como
S =
[a b
b a
]
3. Comprueba que las matrices del tipo, ai,i = k, aj,i = −ai,j
como S =
[a −bb a
]o S2 =
b 0 0
0 a c
0 −c a
tienen autovalores complejos.
4. Prueba que si una matriz es triangular, sus autovalores están en la dia-gonal principal. Para tener un método puedes empezar con una matriztriangular genérica de 2× 2,
luego una de 3× 3, y luego anímate a por ejemplo
U =
a11 a12 · · · a1(n−1) a1n0 a22 · · · a2(n−1) a2n0 0 · · · a3(n−1) a3n...
.... . .
......
0 0 · · · 0 ann
5. Calcula la familia de autovectores asociados a cada autovalor, de las si-
guientes matrices
JOM - Transformaciones Lineales
215
Apéndice H. Ejercitaciones H-4. Valores y Vectores Propios de Matrices n× n
A = [1 −4
−4 1
] [1 −4
−4 2
] [1 0
−4 2
]A = 2 1 0
0 2 0
0 0 3
2 1 0
1 2 0
0 0 3
2 1 0
1 2 −1
0 −1 3
6. Calcula los autovalores y autovectores de las siguientes matrices
A = [a −4
−4 a
] [a −4
−4 b
] [β + 1 1− β1− β β + 1
]A = a a 0
a a 0
0 0 a
a −a 0
−a a 0
0 0 b
a 0 0
1 b 0
d −1 c
7. Repite para
A = −4 −5 −2
2 3 0
10 10 7
0 1 0
0 0 1
2 −5 4
1 0 0
−8 −7 −4
20 20 11
A = −4 2 10
−5 3 10
−2 0 7
0 0 2
1 0 −5
0 1 4
1 −8 20
0 −7 20
0 −4 11
8. ¿Puedes establecer una propiedad acerca de los autovalores y autovec-
tores para las matrices traspuestas?Comprueba que puede sacarse tres, dos, y sólo un autovector de las si-guientes respectivas matricesA = 1 0 0
0 1 0
0 0 1
1 1 0
0 1 0
0 0 1
1 1 0
0 1 1
0 0 1
9. Escoge una matriz ortogonal G ∈ R3×3 ; halla sus autovalores y autovec-
tores. Luego efectúa el producto escalar de los autovectores asociadosa autovalores diferentes. Informa lo que observas. Forma la matriz delos autoversores y verifica si es ortogonal o no. Trata de explicárteloconectando el tema de Autovalores y Autovectores con el tema de Trans-formaciones lineales Isométricas.
10. Obtiene dos matrices similares distintas, para la la matriz A =
[1 0
−4 2
]11. Respecto del ejercicio anterior, halla los autovalores y autovectores de
las tres matrices similares
12. Discute el resultado anterior
216JOM - Transformaciones Lineales

H-4. Valores y Vectores Propios de Matrices n× n Apéndice H. Ejercitaciones
13. Obtiene los autovalores y autovectores de A =
[1 0
−4 2
]y de B = 4A, y de C = kA donde k 6= 0, k ∈ R
14. Discute los resultados anteriores.
15. Si la matriz [T ] tiene un par (λ , v) discute cómo encontrar el par (µ , w)
asociados a
a) la matriz inversa de [T ] . Discute la validez del resultado.
b ) la matriz traspuesta de [T ] . Este par se asocia al autovector porizquierda de [T ]
c) sobre la base anterior, la matriz [B] = [T ]>[T ]
d ) asociado a la matriz similar [B] = [M ] [T ] [M ]−1 si [M ] es de la mismadimensión de [T ] y además invertible
16. Establece el valor de verdad de las proposiciones y justifica, para dosmatrices de n× n, una diagonal y otra triangular superior
a) si tienen la misma diagonal , son similares.
b ) si los elementos de la diagonal de una pueden encontrarse tambiénen la diagonal de la otra, pero en orden diferente, son similares.
c) Sobre esa base; verifícalo con las siguientes matrices, y en caso deque no puedas verificar algo, establece claramente porqué.
A1 =
1 0 0 0 0
0 2 0 0 0
0 0 3 0 0
0 0 0 3 0
0 0 0 0 0
A2 =
1 0 1 2 0
0 2 1 −1 1
0 0 3 2 1
0 0 0 3 0
0 0 0 0 0
A3 =
3 0 0 0 0
0 1 2 1 1
0 0 1 0 0
0 0 0 0 0
0 0 0 0 2
A4 =
3 0 0 0 0
0 1 0 0 0
1 0 0 0 0
4 2 1 3 0
0 0 0 0 2
JOM - Transformaciones Lineales
217

Apéndice H. Ejercitaciones H-5. Cambios de Base y Transformaciones Lineales
H-5. Cambios de Base y Transformaciones Lineales
Objetivo:Este es un práctico que combina cambios de baseaplicados a las diversas formas de escribir una TL através de una matriz asociada. Descubrimos que la matrizasociada que vimos en la sección H-2 no eran únicas ydependen de las bases adotadas en cada espacio. Existemucho interés en «desacoplar» una TL, que quiere decir» verla« desde un punto de vista tal que sea muy simpleentenderla, porque las componentes del transformado solodependen del correspondiente original.-
1. Dada la matriz A =
7 −16 −8
−16 7 8
−8 8 −5
Halla [Λ] de modo que [Λ] tenga
su diagonala- ordenada de mayor a menor.b- ordenada de esta manera {−9 , 27 , −9} .
2. Si los autovectores de una matriz de 2 × 2 son v1 y v2 , Prueba que lamatriz
[v3 v4
], formada por los vectores
v3 = k1v1 , v4 = k2v2
donde k1, k2 ambos son distintos de cero, también es diagonalizante.
3. Prueba que si se intercambian los autovectores en una matriz diagonali-zante, la matriz obtenida sigue siendo diagonalizante.
4. Con los dos últimos ejercicios en mente establece cuántas matrices dia-gonales podrá tener una matriz de n×n y cuántas matrices diagonalizan-tes podrá tener. —No te olvides que no todas las matrices son similaresa una matriz diagonal—
5. Diagonaliza la matriz de 2× 2 simétrica genérica como S =
[a b
b a
]6. Diagonaliza si es posible las siguientes matrices
a)
[1 −4
−4 1
]b )
2 1 0
0 2 0
0 0 3
c)
[1 −4
−4 2
]d )
2 1 0
1 2 0
0 0 3
e)
[1 0
−4 2
]f )
2 1 0
1 2 −1
0 −1 3
Haz las comparaciones del caso
218JOM - Transformaciones Lineales

H-5. Cambios de Base y Transformaciones Lineales Apéndice H. Ejercitaciones
7. Dada una TLT : R2 → R2 | T ((v1, v2)) = (3v1 + v2 , v1 − 2v2)
la base B1 = {(1, 1) , (−1, 1) } , y el vector u = (2,−2)
a) Calcula las matrices asociadas a la TL T, en los cuatro casos([T ] , [T1] , [T ]1 , [T1]1)y representa esas relaciones en un pictograma.
b ) Representa el vector u y su transformado de las diferentes formasposibles.
c) Agrega una base más y determina todas las nuevas matrices posi-bles.
d ) Atribuye un valor de verdad a la expresión : “la cantidad de matricesasociadas a una sola transformación lineal es infinita, porque lasposibles bases en uno y otro espacio son infinitas.”
8. Para la transformación anterior, trata de encontrar una base B3 tal quela transformación pueda verse desacoplada. Calcula la matriz asociadasobre esa base en los dos espacios......¿Era posible prever con certeza la respuesta anterior con la informa-ción de cualquiera de las matrices asociadas calculadas en el punto (a)del ejercicio anterior? Justificar.
9. Para la transformación lineal dada por
[T ]
[a
b
]=
2a
2b
a+ b
que mapea
un espacio vectorial de polinomios en grado hasta 1 a vectores en R3,
y dada una base B1 = {2 , 4x}y el polinomio u (x) = 1 + 2x
Determina matricialmente. . .
a) La matriz [T ] asociada a la TL T
b ) el polinomio u (x) transformado —comprueba mediante la ley—
c) el polinomio en la base B1.
d ) la matriz [T1] asociada a la TL T
e) comprueba el cálculo anterior, verificando que [T (u)] = [T1] [u]1 ,
[T (u)] lo has obtenido en el punto 9b
f ) ¿se podrá calcular [T ]1 ? ¿porqué?
g) prueba que en realidad T : P1 → S , siendo S el subespacio{x, y,
x+ y
2
}10. Prueba que para la TL U : P1 → Q ∈ R3 , con
[U ]
[a
b
]=
a+ b
a− b2a
, la matriz asociada [UA]B es la identidad ,
JOM - Transformaciones Lineales
219

Apéndice H. Ejercitaciones H-5. Cambios de Base y Transformaciones Lineales
siempre que las bases sean las estándares, en este caso
A = {1, x} , B = {(1, 1, 2) , (1,−1, 0)}
11. Para el ejercicio anterior —Ej.9— , toma una baseB2 = {(1, 1, 1) , (−1, 1, 1) , (0, 1,−1) } . Determina1- La matriz [T ]2 asociada a la TL T
2-La matriz [T1]2 asociada a la TL T
12. Para los ejercicios anteriores —11 y 9—:1- mapea los vectores de la base canónica de P1 expresadas en base ca-nónica de R3 y ponlos en orden en la matriz [G1]
2- expresa las imágenes halladas en el ítem anterior sobre la base B2 deR3 y ponlos en orden en la matriz [G2]
3- Compara [G1] con la matriz asociada a la TL original, Compara [G2]
con la matriz [T ]24- Mapea los vectores de la base B1 de P1, y escríbelos sobre la base ca-nónica de R3. Arma con ellos la matriz [G]
5- expresa las imágenes halladas en el ítem anterior sobre la base B2 deR3 y ponlos en orden en la matriz G4
6- Compara G3 con la matriz [T1], Compara G4 con la matriz [T1]2Extrae conclusiones sobre definiciones alternativas de las matrices aso-ciadas.
13. Considerando la matriz [T ] asociada a una TL T : R3 → R3 ,
[T ] =
a b 0
b a 0
0 0 a
donde b 6= a 6= 0 .
a) Diagonaliza la matriz asociada haciendo un cambio de base ade-cuado y verifica los resultados mapeando el vector dado por [u] = 1
1
1
. (debes encontrar una base nueva)
b ) ¿Cambia la transformación lineal debido al cambio de base o es lamisma transformación lineal «vista» desde otra perspectiva ?
c) ¿En qué te parece que se mejora con una forma respecto de la otra?
14. Sea T : R2 → R2 la reflexión de v sobre la dirección u dada por y = −x .1- Encuentra la matriz asociada [T ] a la TL T
2- Encuentra una representación diagonal para [T ]
15. Sea U : R3 → R3 la proyección de vsobre el plano π : x+ 2y − z = 0
1- Encuentra la matriz asociada [U ] a la TL U
2- Encuentra una representación diagonal para [U ]
220JOM - Transformaciones Lineales

H-6. Canonización de Cónicas y Cuádricas Apéndice H. Ejercitaciones
H-6. Canonización de Cónicas y Cuádricas
Objetivo:Este es un práctico en donde se aplican los conceptosadquiridos a la gemometría de las ecuaciones de lasfiguras cónicas y las superficies cuádricas.Se aprovecha las características de las matricessimétricas para resolver elegantemente el problema dela rotación de la cónica o cuádrica respecto de los ejescuando la ecuación admite el término rectangular xy --olos términos xy, xz, yz para las cuádricas--Se completa esto con una traslación, que no es unatransformación lineal, pero en este contexto puedeaplicarse conjuntamente.-
1. Escribe en forma matricial(a)- 4x2 + 3y2 + 8xy + 2x = 4
(b)- 6y2 + 5xy − 3y + 2x = 1
(c)- y2 + x2 = 4
2. En el ejemplo 6.1 teníamos que para la ecuación
7x2 − 6√
3xy + 13y2 + 12√
3x+ 64x+ 12y − 64√
3y = −276
se podía escribir
276 =[x y
] [ 7 −3√
3
−3√
3 13
] [x
y
]+
+[
12√
3 + 64 12− 64√
3] [ x
y
]y los autovalores eran
λ1 = 16 , λ2 = 4
Verifica que si se toman al revés los autovalores la ecuación canonizadahubiese quedado de otra manera, pero los ejes se hubieran cambiadotambién y la figura hubiese sido la misma.
3. Canoniza y Grafica(a)- 4x2 + 3y2 + 8xy + 2x = 4
(b)- 6y2 + 5xy − 3y + 2x = 1
(c)- y2 + x2 = 4
(d)- x2 + y2 + xy + x+ y = 1
(e)- 4x2 − 2y2 + 4xy + 2 = 0
(f)- 2x2 + 8y2 + 8xy − 4x+ 2y = 0
(g)- dada por A =
[−1 2
2 3
]y B =
[2 1
]
JOM - Transformaciones Lineales
221

Apéndice H. Ejercitaciones H-6. Canonización de Cónicas y Cuádricas
4. Canoniza1- 5x2 + 5y2 + 8xy + 4xz + 4yz + 2z2 = 1
2- x2 − 2xy + y2 − 2xz − 2yz + z2 + 2 = 0
3- x2 − 2xy + y2 − 2xz − 2yz + z2 + 2− z − x+ y = 0
4- dada por A =
−1 2 0
2 3 0
0 0 5
y B =[
2 1 −4]
5- dada por A =
−1 2 0 −2
2 3 0 0
0 0 5 −1
−2 0 −1 6
y B =[
2 1 −4 0]
Ayuda: la forma cuadrática puede tener más variables, en este caso pue-de hacer v> =
[x y z q
], o mejor v> =
[x1 x2 x3 x4
]5. ¿Qué representan los autoversores de la matriz de los coeficientes A?
6. ¿Qué pasa con la cuádrica si dos autovalores coinciden?
7. ¿Qué pasa con la cuádrica si los tres autovalores coinciden?
8. ¿Qué problemas se generarán en esos casos para encontrar autoversoresortogonales?
9. ¿Qué pasa si dos términos rectangulares son iguales a cero y el otro noes cero?
10. ¿Qué pasa si dos términos cuadráticos son iguales y el otro es cero?
222JOM - Transformaciones Lineales

H-7. Ejemplo de examen Apéndice H. Ejercitaciones
H-7. Ejemplo de examen
1. Para el sistema lineal homogéneneo escrito en forma matricial A ·X = θ,donde (importante) A ∈ Rp×q y el conjunto S = {x |A · x = θ } ⊂ Rq.Completa los espacios en blanco
a) x ∈ R 0 , y θ ∈ R 0 , lo cual define:
X ⊂ V; V =
(R 0 ,+, R, ·
); θ ∈ V ′; V ′ =
(R 0 ,+, R, ·
)b ) Completa, justifica o comenta lo que se hace en cada paso
u, v ∈ S, a ∈ R⇓
A · u = θ ∧A · v = θ toma dos soluciones y un escalar
A · (u+ v) = A · u+A · v propiedad distributivavava de las matrices
= θ + θ por ser u y v dos solucionesnesnes
= θ axioma 3 en EVRE: © Rn © Rp © Rq
∴ u+ v ∈ S ©verdadero © falso
A · (a u) = A · (aI u) = A · (Dau) convierte todo en matriz, Da es diagonal
= (ADa) u = (DaA) u A y Da conmutan
= Da (A u) de nuevo asociatividad
= (aIA)u = aAu = a (Au) reconvierte para volver el escalar
= a θ porque resulta que por 1, u es solución
= θ propiedad de espacio en © Rn © Rp © Rq
∴ a u ∈ S ©verdadero © falso
como conclusión:
2. Para el conjunto { (3,−3, 2, 6), (1,−1,−1,−3) }, encuentra: el espacio ge-nerado y la base canónica del mismo.
3. Halla las matrices asociadas a las transformaciones lineales dadas me-diante su acción sobre el cuadrado unitario
X
Y
O A
BC
a) X
Y
O′ C ′
B′A′
b ) X
Y
O′ A′
B′C ′
2 3
1
JOM - Transformaciones Lineales
223

Apéndice H. Ejercitaciones H-7. Ejemplo de examen
4. Sean las transformaciones linealesL3 : R3 7→ R2 |L3(x, y, z) = (x+ z,−2x− 3y) y
L4 : R2 7→ R3 |L4(x, y) = (x, y, y − x)
a) Halla la matriz asociada [L ] de la composición entre L3 y L4, si esL : R2 7→ R2.
b ) Transforma el cuadrado unitario mediante L, y grafica.
c) Halla los espacios asociados a los autovalores de [L]
d ) Halla la base B1 de R2 para que [L1 ]1 se vea desacoplada.
224JOM - Transformaciones Lineales
H-8. Una palabra para compartir con profesores Apéndice H. Ejercitaciones
H-8. Una palabra para compartir con profesores
Si el tema de que el EV es una estructura algebraica no es sencillo de in-corporar en primer año de nuestras facultades de ingeniería y el estudian-te tiende a pensar en el EV como un conjunto nada más; el peligro es quelas transformaciones lineales entre espacios vectoriales ingresen a su modelomental como una simple extensión de las funciones entre conjuntos. En otraspalabras: la consideración de las propiedades de esos conjuntos y el hechode que estén conectados dentro de estructuras que comparten el cuerpo deescalares quedaría excluida o al menos muy debilitada.
La interpretación de cualquier algoritmo que usen los estudiantes para re-solver sistemas lineales es crucial. Prácticamente ningún concepto puede que-dar claro —me refiero a que se incluya la parte «saber cómo— sin este requi-sito, así que resulta primordial asegurarse al principio de que este tema estámuy bien aprehendido.
La excesiva mecanización de procedimientos es un rasgo propio de estostemas, —pensemos en espacios generados, en la determinación de que unconjunto de vectores es o no linealmente dependiente, en el cálculo de auto-vectores y así hasta las canonizaciones de cónica y cuádrica son sencillas deresolver con dos o tres técnicas o procedimientos— y el docente debe estarmuy atento para evitar caer en ellas, y para evitar que los estudiantes —aúnmás propensos justamente por estar expuestos a temas bastante abstractos yen el proceso del aprendizaje, a tomar este atajo— lo hagan.
Hay una cuestión no menor: la naturaleza se rige es general por leyes nolineales. Lo lineal es una abstracción que nos permite teorizar bajo supues-tos que a estas alturas de la carrera los alumnos no advierten. Por eso essumamente conveniente aunque más no sea tratar tangencialmente las trans-formaciones no lineales.
Resumir que un si un vector es colineal con su transformado es un auto-vector es quedarse con el concepto de que los espacios vectoriales solamentese dan bajo los cuerpos reales, amén de que tampoco es correcto cuando estáasociado a un valor propio cero. Los autovectores de interés en la ingeniería—por ejemplo en el control de sistemas, los sistemas se controlan para quetengan autovectores complejos en cierta parte del semiplano izquierdo delplano complejo (si se trata de sistemas dinámicos de tiempo continuo) o quequeden confinados a una región de diseño dentro del círculo unitario (en elcaso de sistemas de tiempo discreto, digitales o modelos de tiempo continuodiscretizados).
Existen excelentes oportunidades para combinar lo que el alumno estáaprendiendo de los cursos de cálculo y aventurarse a mostrar aplicacionesen otras asignaturas posteriores —ecuaciones versus funciones, funciones devarias variables, esfuerzos en vigas, etcétera.
Hay ciertos inconvenientes a la hora de entender que la transformación de
JOM - Transformaciones Lineales
225

Apéndice H. Ejercitaciones H-8. Una palabra para compartir con profesores
rotación no tiene nada que ver con la rotación de coordenadas (cambio debase) con la que se juega para encontrar los ejes principales de cónicas ycuádricas.
Asimismo hay una idea generalizada de que las matrices que admiten dia-gonalización deben ser regulares, y una gran dificultad para encontrar paresautovalor–autovector a partir de matrices genéricas —por ejemplo, los de latraspuesta, los de la escalada, etcétera—
226JOM - Transformaciones Lineales
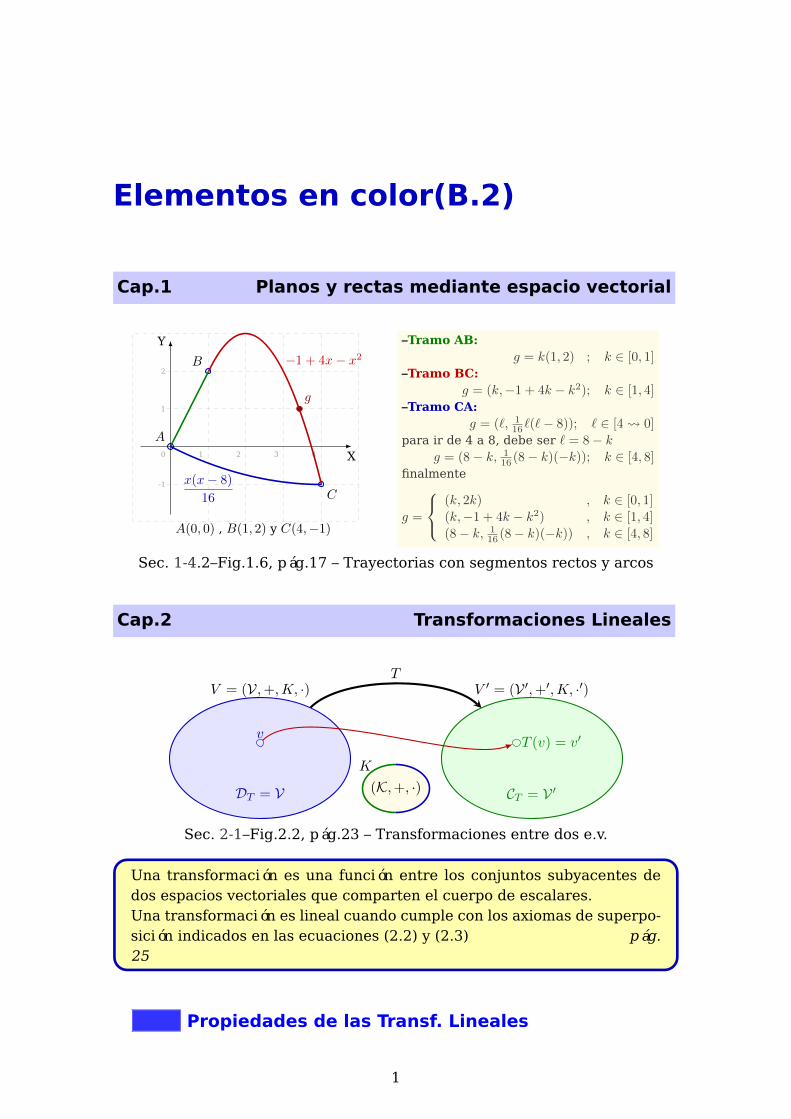
Elementos en color(B.2)
Cap.1 Planos y rectas mediante espacio vectorial
A
B
C
g
Y
X0 1 2 3 4
-1
1
2−1 + 4x− x2
x(x− 8)
16
A(0, 0) , B(1, 2) y C(4,−1)
–Tramo AB:g = k(1, 2) ; k ∈ [0, 1]
–Tramo BC:g = (k,−1 + 4k − k2); k ∈ [1, 4]
–Tramo CA:g = (`, 1
16`(`− 8)); ` ∈ [4 0]
para ir de 4 a 8, debe ser ` = 8− kg = (8− k, 1
16 (8− k)(−k)); k ∈ [4, 8]
finalmente
g =
(k, 2k) , k ∈ [0, 1]
(k,−1 + 4k − k2) , k ∈ [1, 4]
(8− k, 116 (8− k)(−k)) , k ∈ [4, 8]
Sec. 1-4.2–Fig.1.6, pág.17 – Trayectorias con segmentos rectos y arcos
Cap.2 Transformaciones Lineales
vT (v) = v′
T
DT = V CT = V ′
V = (V,+,K, ·) V ′ = (V ′,+′,K, ·′)
(K,+, ·)K
Sec. 2-1–Fig.2.2, pág.23 – Transformaciones entre dos e.v.
Una transformación es una función entre los conjuntos subyacentes dedos espacios vectoriales que comparten el cuerpo de escalares.Una transformación es lineal cuando cumple con los axiomas de superpo-sición indicados en las ecuaciones (2.2) y (2.3) pág.25
Propiedades de las Transf. Lineales
1
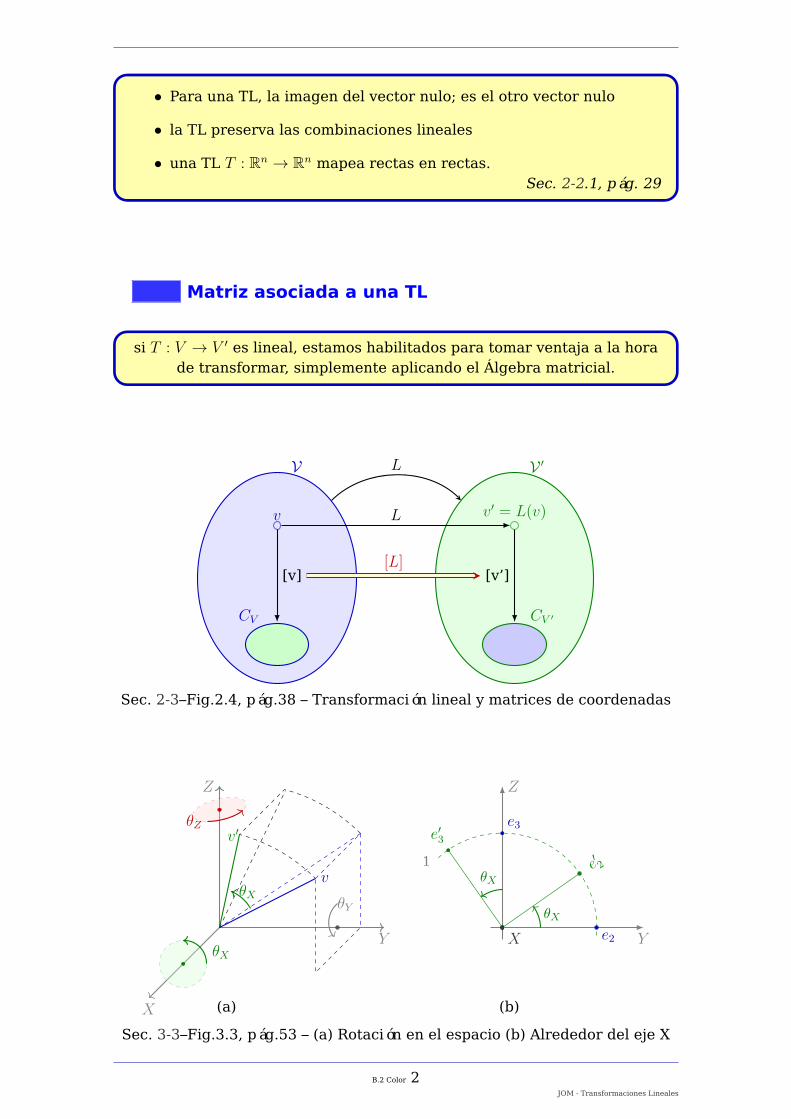
• Para una TL, la imagen del vector nulo; es el otro vector nulo
• la TL preserva las combinaciones lineales
• una TL T : Rn → Rn mapea rectas en rectas.Sec. 2-2.1, pág. 29
Matriz asociada a una TL
si T : V → V ′ es lineal, estamos habilitados para tomar ventaja a la horade transformar, simplemente aplicando el Álgebra matricial.
v v′ = L(v)L
CV CV ′
[v] [v’][L]
LV V ′
Sec. 2-3–Fig.2.4, pág.38 – Transformación lineal y matrices de coordenadas
X
Y
Z
θX
v
v′
θX
θZ
θY
(a) (b)
Y
Z
1
θX
θX
e2
e3
e′2
e′3
X
Sec. 3-3–Fig.3.3, pág.53 – (a) Rotación en el espacio (b) Alrededor del eje X
B.2 Color 2JOM - Transformaciones Lineales
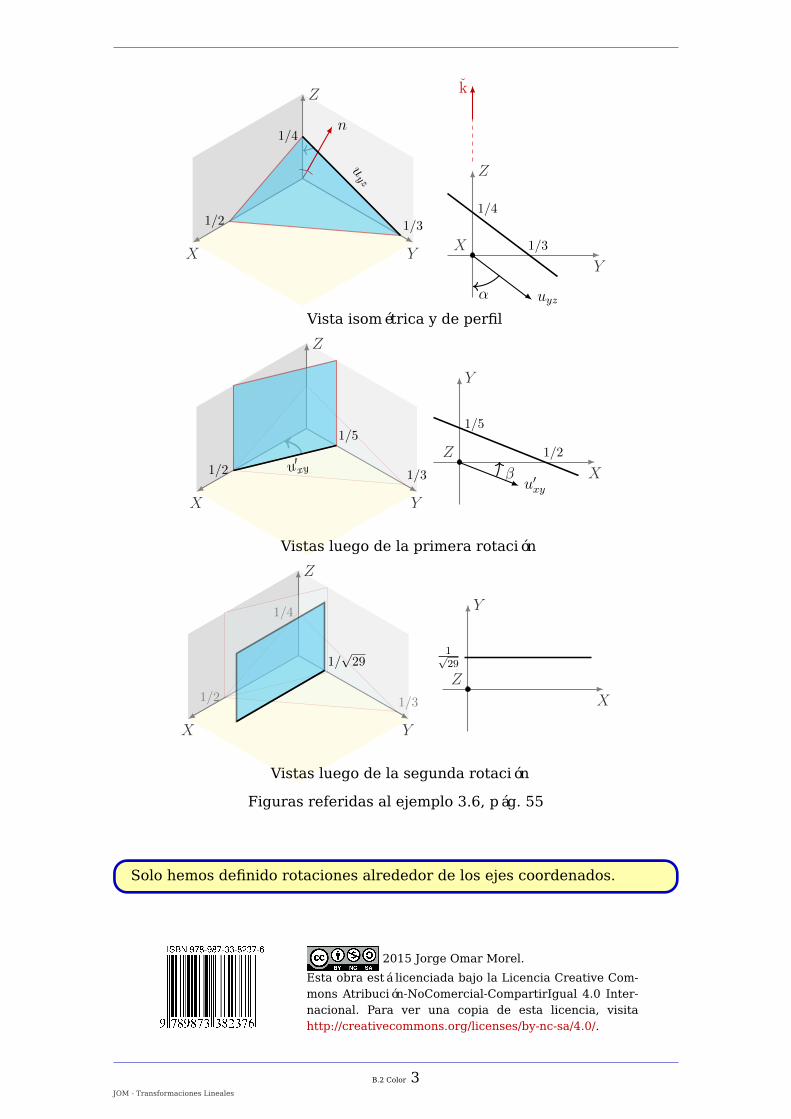
X Y
Z
n
uyz
1/2
1/4
1/3
Y
Z
X
k
uyzα
1/3
1/4
Vista isométrica y de perfil
X Y
Z
u′xy1/2
1/5
1/3 X
Y
Z
u′xyβ
1/2
1/5
Vistas luego de la primera rotación
X Y
Z
1/2
1/4
1/√
29
1/3 X
Y
Z
1√29
Vistas luego de la segunda rotación
Figuras referidas al ejemplo 3.6, pág. 55
Solo hemos definido rotaciones alrededor de los ejes coordenados.
2015 Jorge Omar Morel.
Esta obra está licenciada bajo la Licencia Creative Com-mons Atribución-NoComercial-CompartirIgual 4.0 Inter-nacional. Para ver una copia de esta licencia, visitahttp://creativecommons.org/licenses/by-nc-sa/4.0/.
JOM - Transformaciones Lineales
B.2 Color 3
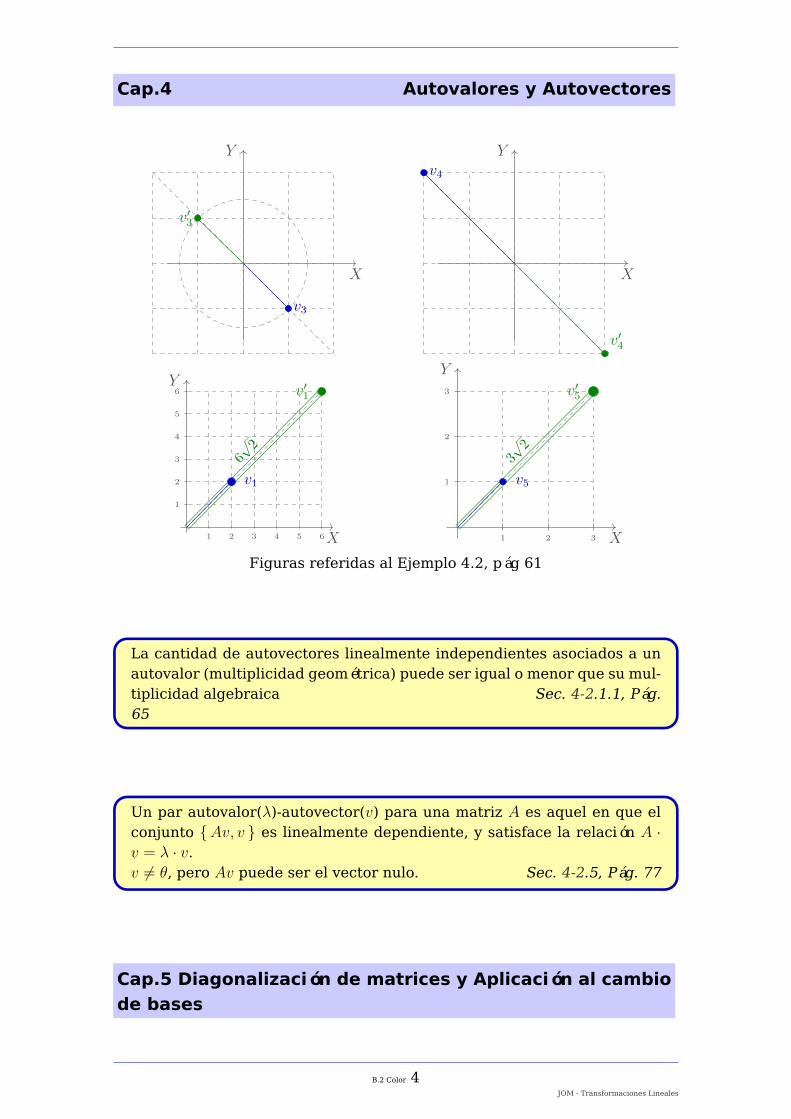
Cap.4 Autovalores y Autovectores
X
Y
v3
v′3
X
Yv4
v′4
6√ 2
X
Yv′1
v1
1
1
2
2
3
3
4
4
5
5
6
6
3√ 2
X
Y
v′5
v5
1
1
2
2
3
3
Figuras referidas al Ejemplo 4.2, pág 61
La cantidad de autovectores linealmente independientes asociados a unautovalor (multiplicidad geométrica) puede ser igual o menor que su mul-tiplicidad algebraica Sec. 4-2.1.1, Pág.65
Un par autovalor(λ)-autovector(v) para una matriz A es aquel en que elconjunto {Av, v } es linealmente dependiente, y satisface la relación A ·v = λ · v.v 6= θ, pero Av puede ser el vector nulo. Sec. 4-2.5, Pág. 77
Cap.5 Diagonalización de matrices y Aplicación al cambio
de bases
B.2 Color 4JOM - Transformaciones Lineales

• diagonalizar es encontrar una matriz similar diagonal. La matriz dia-gonalizante está formada por autovectores.
• La matriz diagonal no es única, menos aún la matriz diagonalizanteserá única.
• Los autovectores de una matriz diagonalizable forman una base pa-ra los espacios que relaciona la transformación lineal a la que estamatriz está asociada.
V V ′
KCV CV ′
vL(v) = v′
L
[ v ] [ v′ ][L ]
Sec. 5-3–Fig.5.1, pág.93 – Cambio de bases (Ilustración 1)
v v′V V ′
KCV CV ′B1 B2
L
[ v ]1[ v ]
[B1 ]
[ v′ ]2 [ v′ ]
[B2 ]
[L1 ]2
Sec. 5-3–Fig.5.2, pág.93 – Cambio de bases (Ilustración 2)
v v′L
V V ′
K
CV CV ′
B1 B2
V V ′
[ v ]
[ v ]1
[ v′ ]
[ v′ ]2
[B1 ] [B2 ]
[L ]
[L1 ]2
[L ]2
[L1 ]
Sec. 5-3–Fig.5.3, pág.95 – Cambio de bases (pictograma final)
JOM - Transformaciones Lineales
B.2 Color 5
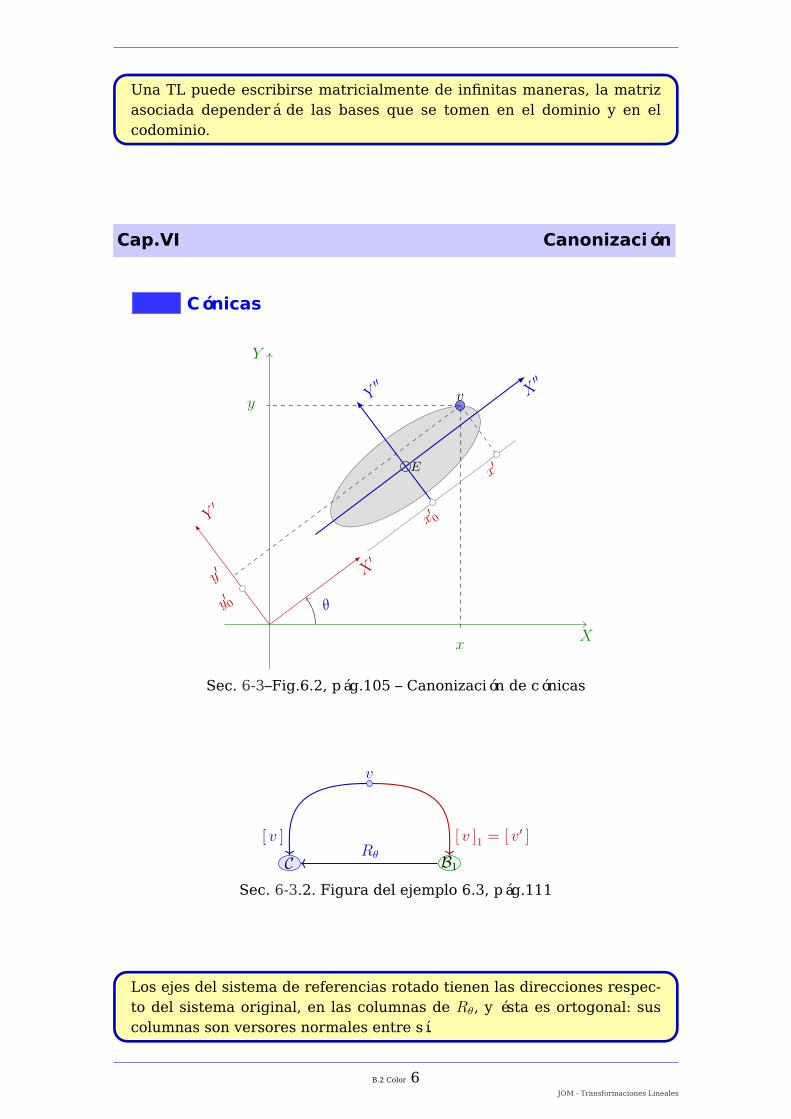
Una TL puede escribirse matricialmente de infinitas maneras, la matrizasociada dependerá de las bases que se tomen en el dominio y en elcodominio.
Cap.VI Canonización
Cónicas
X
Y
y′
E
x
vyX′′
y′0
Y′′
Y′
θ
X′
x′0
x′
Sec. 6-3–Fig.6.2, pág.105 – Canonización de cónicas
v
C B1Rθ
[ v ] [ v ]1 = [ v′ ]
Sec. 6-3.2. Figura del ejemplo 6.3, pág.111
Los ejes del sistema de referencias rotado tienen las direcciones respec-to del sistema original, en las columnas de Rθ, y ésta es ortogonal: suscolumnas son versores normales entre sí.
B.2 Color 6JOM - Transformaciones Lineales

X
Y
X ′′
Y ′′
θ′
θ′′
Figuras del ejemplo 6.5, pág.114 (3 y 4 de 4)
X
Y
X ′
Y ′
X ′′
Y ′′
θ′
θ′′ x′′ = x′ + 4
y′′ = y′ + 3
Apx.A Mapeos de trayectorias en el plano
A-1.2 Con transformaciones no lineales (Ejemplo)
0.5 1.5
-0.5
0.5
1.5
Y
X-0.5 1 2
-1
1
Y′
X′
(1, 0) 7→(1, 2)
0.5 1.5
-0.5
0.5
1.5
Y
X
-1
1
-0.5 1 2
Y′
X′
(1, 0) 7→(1, 2)
Sec. A-1.2–Fig.A.4, pág.134 – Mapeo no lineal N sobre ambas trayectorias
JOM - Transformaciones Lineales
B.2 Color 7
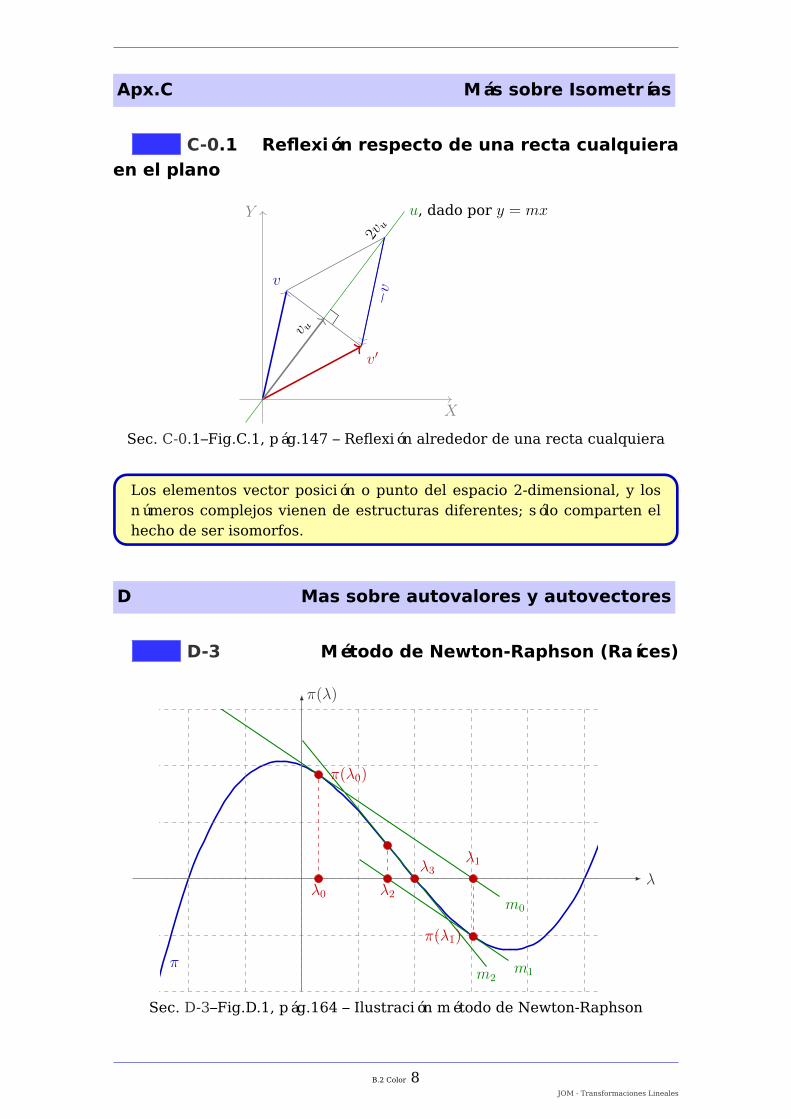
Apx.C Más sobre Isometrías
C-0.1 Reflexión respecto de una recta cualquiera
en el plano
X
Y u, dado por y = mx
v
v′
v u
2vu
−v
Sec. C-0.1–Fig.C.1, pág.147 – Reflexión alrededor de una recta cualquiera
Los elementos vector posición o punto del espacio 2-dimensional, y losnúmeros complejos vienen de estructuras diferentes; sólo comparten elhecho de ser isomorfos.
D Mas sobre autovalores y autovectores
D-3 Método de Newton-Raphson (Raíces)
λ
π(λ)
π
m0
m1m2
λ0
π(λ0)
λ1
π(λ1)
λ2
λ3
Sec. D-3–Fig.D.1, pág.164 – Ilustración método de Newton-Raphson
B.2 Color 8JOM - Transformaciones Lineales

nada

nada