herbert shea institute of microengineering epfl switzerland
TRANSCRIPT

Miniaturized Dielectric Elastomer Actuators for Smart Machines
Herbert Shea
Institute of Microengineering
EPFL
Switzerland
http://lmts.epfl.ch/DEA

Nadine Besse
Alexis Marette Sam Schlatter
Samuel Rosset
Alexandre Poulin
Matthias Imboden
Herbert Shea Francesca Sorba
Seun Araromi David Mccoul
Xioabin Ji
Many thanks to my team
J. Shintake


What does it take to make a smart soft machine?
Need Flexible or even stretchable:
– Electronics (control, react)
– Actuation
– Sensing
– Energy Harvesting
4
Scuola Superiore Sant'Anna in Pisa, Italy R. F. Shepherd, PNAS 2011, 20400–20403,
doi: 10.1073/pnas.1116564108

Monolithic actuator + sensor +
structure consisting of:
– soft dielectric (elastomer) and
– compliant electrodes
When kV voltage is applied, the elastomer is
squeezed by the electrostatic force
5
Dielectric Elastomer Actuators
Dielectric Elastomer Actuators (DEA) are awesome
6
• Large strain:
• over 1600% area strain demonstrated,
• 30% to 80% for long-term operation
• Soft: Young’s modulus ≈ 1 MPa
• Performance comparable to human
muscles
Soft robotics
Interaction with soft tissue
Tunable optics…
• Can add intelligence through
self-sensing and self-switching
S. Ashley, Scientific American 289, p.52 2003
EMPA’s (Zurich) 7m long blimp: “swims”
through the air using 4 artificial muscles SRI, circa 2006 http://goo.gl/14KR0

Miniaturized reliable DEAs at EPFL-LMTS. Some examples
7 Details & movies: http://lmts.epfl.ch/DEA
100 µm
Biological cell stretcher Foldable actuators Grippers for soft robotics
Stretchable soft sensors 30 GHz phase shifter
Stack of 128 layers
5 mW in 1 cm3
Soft Energy harvester

© 2013 DreamWorks Animation
CAN SOFT MACHINES BE FAST?
• Electrical time constant ≈ RC
• Mechanical resonance ≈
• Viscoelasticity
m
k
Need conductive soft electrodes
Need good elastomer with low
mechanical loss
Need good design

9
U. Auckland, New Zealand, Biomimetics Lab
Acrylic-based DEAs are slow (but easy to make)

Using silicones allows for kHz operation (and long lifetime)
10
High-speed rotary motor (rotates at 25 Hz, 1500 rpm),
driven at 760 Hz by 25 µm thick silicone DEA
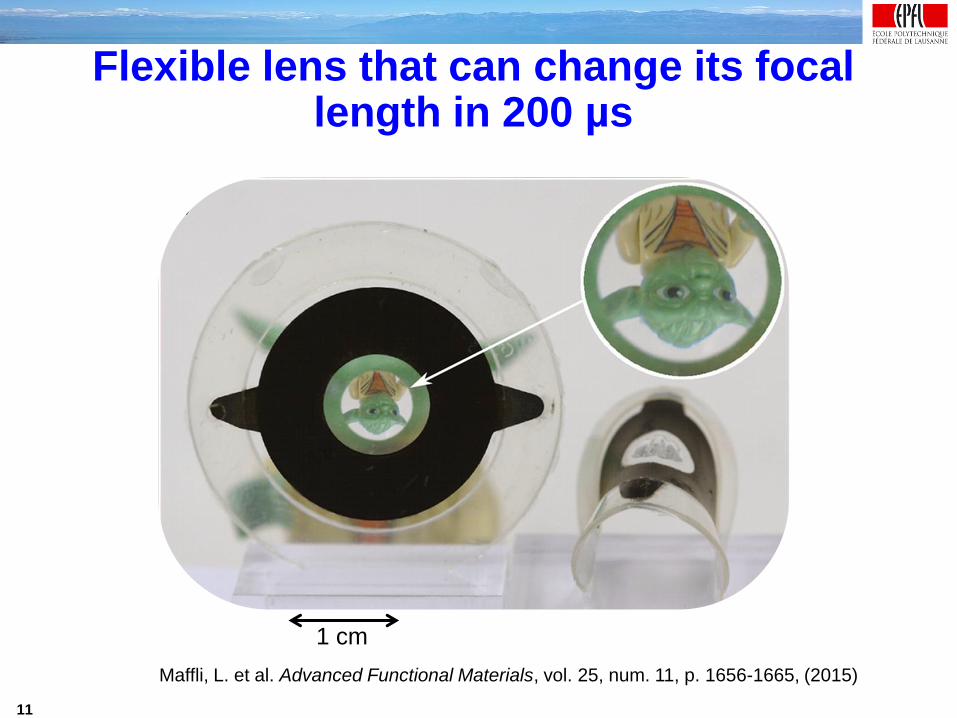
Flexible lens that can change its focal length in 200 µs
1 cm
11
Maffli, L. et al. Advanced Functional Materials, vol. 25, num. 11, p. 1656-1665, (2015)

Lens is driven by DEAs which expand to change lens curvature
12
O2 plasma bonding of two silicone membranes
encapsulating an optical liquid
Focal length is reduced when DEA is activated
For speed: silicone used as: • Dielectric membrane
• Optical membrane
• Optical liquid
• Electrode
This lens concept was first reported
with acrylic materials by Carpi, F. et al.
Advanced Functional Materials, 2011,
21, 4152-4158
Stable operation for
over 400 million
cycles

13

Soft can be fast if the right materials are chosen Silicone lens: 1000x larger bandwidth than acrylic
Optical response to a periodic signal for a silicone and VHB (acrylic) lens
14
Silicone lens: nearly flat response up
to 1 kHz. Clear resonance peak
VHB lens: decrease in amplitude
even at low frequency. No
resonance.
3 orders of magnitudes

MULTI SEGMENT SOFT GRIPPER (DIELECTRIC ELASTOMER MINIMUM ENERGY
STRUCTURES)
15
A. Araromi et al, “Roll-able multisegment dielectric elastomer minimum energy structures for a deployable
microsatellite gripper ”, IEEE Transactions on Mechatronics vol. 20, num. 1, p. 438, (2015).

Space Debris
Is this really a problem??
16

Need an End-effector (grabber) for the Active Debris Remover
17
DEA Advantages:
• Compact
• Light weight
• No complicated
mechanical parts
• Adaptable to the
shape of the debris
• Radiation tolerant
Robotic Arms
Dielectric Elastomer Minimum Energy
Structures (DEMES)
Ion Beam Shepard Harpoon or Nets
G. Kofod et al., Applied
Physics letters, 2007

CleanSpace One – a small Swiss satellite to remove space debris (which it needs to grab)!
18

19

High Conformity to many shapes Simple control
20

DEMES Actuation principle
Holding force limited by stiffness of substrate (PET or PDMS)
Routes to increasing holding force:
- Phase change material: SMP or low-melting point metal
- Electro-adhesion
Flexible substrate

DEMES Actuation principle
Flexible substrate

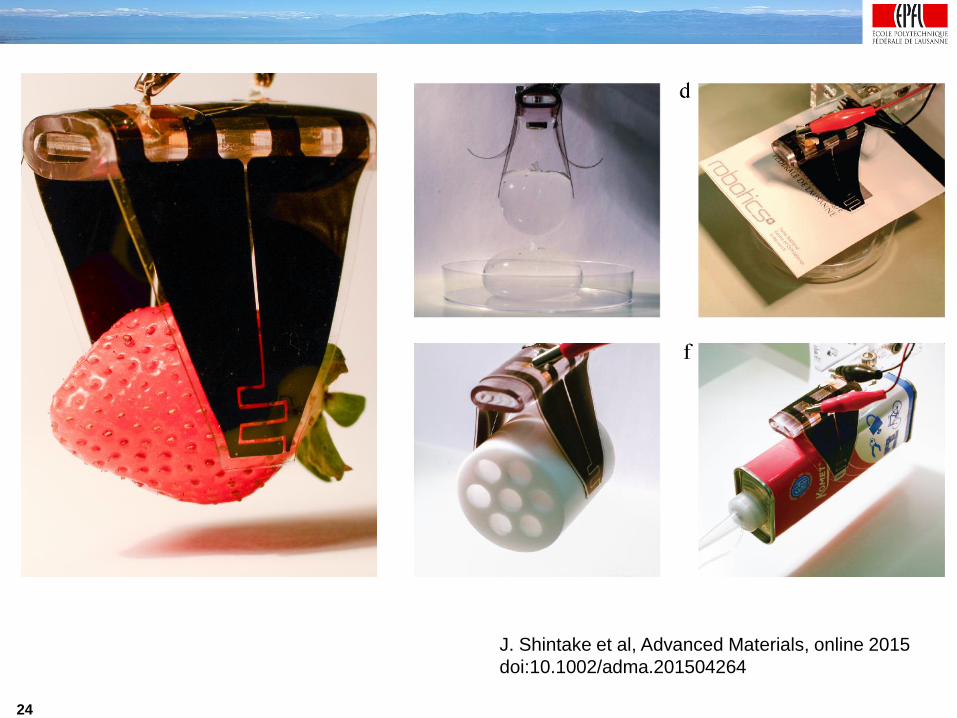
DEA+Electro-adhesion for soft robotics: 1-gram actuator picks up a 60-gram egg
2
3
Collaboration with lab of prof. Floreano, EPFL
J. Shintake et al, Advanced Materials, online 2015 (front cover 2-2016) doi:10.1002/adma.201504264
24
J. Shintake et al, Advanced Materials, online 2015
doi:10.1002/adma.201504264

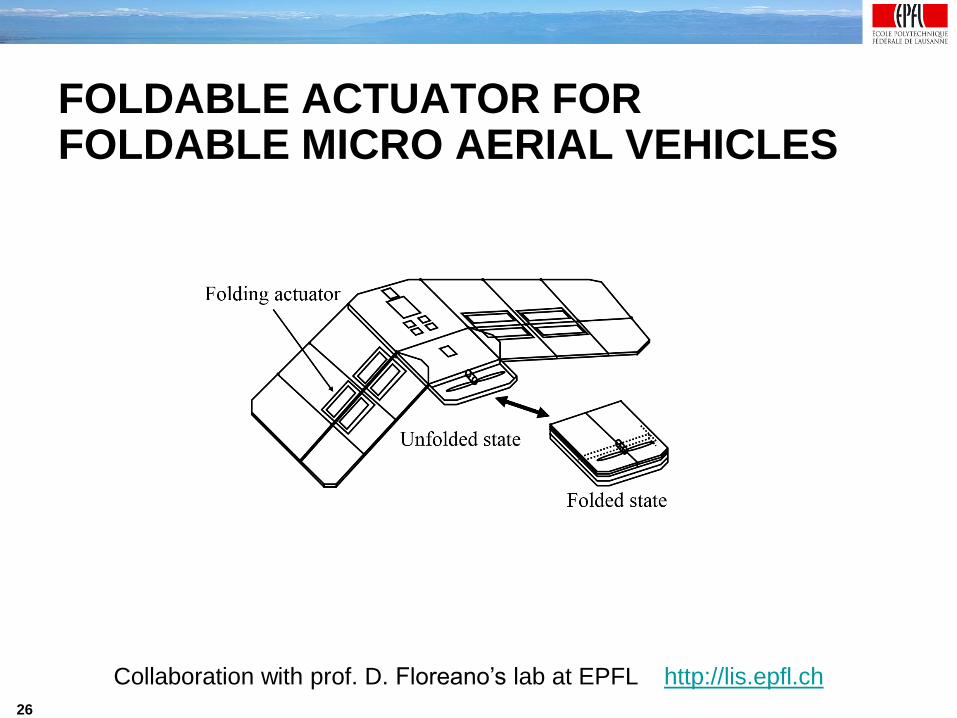
FOLDABLE ACTUATOR FOR FOLDABLE MICRO AERIAL VEHICLES
26
Collaboration with prof. D. Floreano’s lab at EPFL http://lis.epfl.ch

First step: fixed wings, foldable actuators (elevons)
Wing span: 40 cm
Mass: 127 g
Airframe material: Styrofoam
Flight speed: 7.2 m/s
27
J. Shintake et al, IEEE Transactions on Mechatronics (2015)
doi:10.1109/TMECH.2014.2359337

Foldable DEA Elevon
Dimension: 130 mm * 70 mm
Weight: 14.4 g
Measured performance:
– Stroke angle: ±28°
– Torque: 2 N*mm
28

29

TOWARDS TRULY SMART SOFT MACHINES
30
1. Adding intelligence to the DEAs (making the “smart”
material actually smart)
a. Incorporating strain/position/proximity sensors
b. Printing TFTs on elastomer (500V)
this will enable devices with intelligence built-in
2. Lower DEA voltage to sub 100V
3. Increasing holding force by combining with Shape
Memory Polymers for tactile display and variable stiffness
robotics
31

• Fast! (with right materials & electrodes)
• Manufacturable: batch-produced, repeatable
• Soft: good interface to biological tissues
• Reliable: long lifetime
• enabling for very wide range of applications
With dielectric elastomer transducers one
can combine:
– energy harvesting,
– Self-sensing
– distributed actuation
Add flexible electronics to create:
intelligent artificial soft machines
32
Dielectric Elastomer Actuators

33
Contact Info:
Herb Shea ([email protected])
EPFL-LMTS
Rue de la Maladière 71b, CP 526
CH-2002 Neuchâtel
Switzerland
Details & movies: http://lmts.epfl.ch/DEA

34
Financial Support from:
• Swiss National Science Foundation
• European Space Agency
• EPFL
• ESNAM
• FP7 Blindpad
•NCCR robotics