functional link artificial neural network applied to active noise control of a mixture of tonal and...
TRANSCRIPT

Fc
Sa
b
a
ARRAA
KANCHF(
I
cEantlpwn
IT
((
h1
Applied Soft Computing 23 (2014) 51–60
Contents lists available at ScienceDirect
Applied Soft Computing
j ourna l h o mepage: www.elsev ier .com/ locate /asoc
unctional link artificial neural network applied to active noiseontrol of a mixture of tonal and chaotic noise
antosh Kumar Beheraa,b,∗, Debi Prasad Dasa, Bidyadhar Subudhib
Process Engineering and Instrumentation Cell, CSIR-Institute of Minerals and Materials Technology, Bhubaneswar 751013, IndiaDepartment of Electrical Engineering, National Institute of Technology, Rourkela, India
r t i c l e i n f o
rticle history:eceived 8 February 2013eceived in revised form 13 January 2014ccepted 6 June 2014vailable online 13 June 2014
eywords:ctive noise control (ANC)arrowband ANChaotic noiseybrid ANCunctional link artificial neural networkFLANN)
a b s t r a c t
Many practical noises emanating from rotating machines with blades generate a mixture of tonal andthe chaotic noise. The tonal component is related to the rotational speed of the machine and the chaoticcomponent is related to the interaction of the blades with air. An active noise controller (ANC) with eitherlinear algorithm like filtered-X least mean square (FXLMS) or nonlinear control algorithm like functionallink artificial neural network (FLANN) or Volterra filtered-X LMS (VFXLMS) algorithm shows sub-optimalperformance when the complete noise is used as reference signal to a single controller. However, ifthe tonal and the chaotic noise components are separated and separately sent to individual controllerwith tonal to a linear controller and chaotic to a nonlinear controller, the noise canceling performanceis improved. This type of controller is termed as hybrid controller. In this paper, the separation of tonaland the chaotic signal is done by an adaptive waveform synthesis method and the antinoise of tonalcomponent is produced by another waveform synthesizer. The adaptively separated chaotic signal is fedto a nonlinear controller using FLANN or Volterra filter to generate the antinoise of the chaotic part of thenoise. Since chaotic noise is a nonlinear deterministic noise, the proposed hybrid algorithm with FLANN
based controller shows better performance compared to the recently proposed linear hybrid controller.A number of computer simulation results with single and multitone frequencies and different types ofchaotic noise such as logistic and Henon map are presented in the paper. The proposed FLANN basedhybrid algorithm was shown to be performing the best among many previously proposed algorithms forall these noise cases including recorded noise signal.ntroduction
In the modern day society, noise pollution is an importantoncern due to increased usage of noise polluting machineries.xcessive noise issue in industry, public places, transportation,nd medical devices has motivated researchers for developingoise control devices. Passive enclosures and barriers are not effec-ive for low frequency noises. Continuous exposure to high dBow frequency noise can lead to hearing loss, headache and other
hysiological diseases. Active noise control (ANC) is a techniquehich uses the principle of destructive interference to control theoise [1,2]. The ANC device is an electro-acoustic system which∗ Corresponding author at: Process Engineering and Instrumentation Cell, CSIR-nstitute of Minerals and Materials Technology, Bhubaneswar 751013, India.el.: +91 9438182457.
E-mail addresses: [email protected], santosh behera [email protected]. Behera), debi das [email protected] (D.P. Das), [email protected]. Subudhi).
ttp://dx.doi.org/10.1016/j.asoc.2014.06.007568-4946/© 2014 Elsevier B.V. All rights reserved.
© 2014 Elsevier B.V. All rights reserved.
can generate antinoise by a loudspeaker which is of same ampli-tude and opposite phase of the offending noise. This principle ofnoise control has been a topic of research for quite sometimeswhere novel algorithms are being developed to combat variousimplementational issues and also to improve the noise controllingperformance.
The ANC system generates the antinoise by a controller whichdrives an electro-acoustic device to control the noise. The controllercan be adaptive or fixed. The adaptive controllers are effectivefor dynamic environment and noise characteristics. The ANC isexpected to be used as a tool to control noise pollution in indus-try and residential areas due to rapid urbanization and growingdemand of manufacturing. Noise is generally produced by motors,compressors, blowers, machines, transformers, etc. Based on thefrequency content, the noise is classified as tonal, narrowband orbroadband. Noise is also classified as uniform or Gaussian based
on its statistical property. Another type of noise which has gainedresearch interest these days is the chaotic noise [3]. The chaoticnoise is a nonlinear deterministic noise, whereas, the tonal isa linearly predictable one. The chaotic noise can be nonlinearly
5 Soft Co
pcm
totHbanaacnttfeAgempfmowhVp(ptbqRe[icovatc
plstawRahhcaTtcfiFnc
2 S.K. Behera et al. / Applied
redictable. The chaotic noise is neither tonal nor random. Thehaotic noise is generated from a dynamic systems like rotatingachines, fans and airfoils [3–5].The ANC algorithms are applied to varieties of noises such as
onal, broadband and chaotic type. The tonal noise, which consistsf discrete frequency components are easier to control using adap-ive technique and shows greater degradation of noise intensity.owever, a practical noise consists of tonal components and broad-and components. For example, a water pump, fan or grinder has
motor rotating at a particular speed generates the tonal compo-ents and the interaction of the rotating part with the axis andir generates broadband noise. Therefore, the noise generated is
mixture of tonal and broadband noises. The broadband noisean be either random or chaotic. As discussed earlier, the chaoticoise is a nonlinearly deterministic noise and a nonlinear predic-ive controller is essential for this. The linear controller such ashe filtered-X last mean square (FXLMS) algorithm is sufficientor the random broadband noise and is not effective for nonlin-ar noise such as chaotic noise [1]. The FXLMS algorithm basedNC for controlling stochastic broadband noise does not showreat performance due to band limited hardware systems. How-ver, due to deterministic property of chaotic broadband noise,any nonlinear ANC algorithms have been proposed in recent
ast which show better performance over the FXLMS algorithmor chaotic noises [5–11]. Nonlinear active noise controllers are
ostly based on the soft-computing tools like different versionsf neural network for noise and vibration control. Neural net-ork [12–17] and radial basis function based neural network [5]ave been used for active control of nonlinear noise/vibration.olterra series expansion based ANC algorithms [6,8,11] are alsoopular due to its low complexity. Functional link neural networkFLANN) [18] based filtered-s LMS algorithm (FSLMS) was initiallyroposed in Ref. [7]. This was shown to be very simple and compu-ationally and performance wise efficient. Extension of this FLANNased FSLMS algorithm can be seen for multichannel ANC [9], fre-uency domain implementation [19], virtual ANC in [3,20–22].ecently, works have been carried out to develop better nonlin-ar ANC algorithms using the Volterra filter and FSLMS algorithm23–25]. Combination of both Volterra filter and FLANN is proposedn [25] for effective cancelation of nonlinear noise processes. Otherompetitive nonlinear control algorithms are based on the usagef polynomial Nonlinear AutoRegressive models with eXogenousariables (NARX) models [26], adaptive bilinear filter [27] etc. Inddition to these algorithms, other nonlinear prediction and con-rol algorithms using softcomputing tools [28–31] can be used forontrolling chaotic noise.
All these papers attempted to control only the nonlinear noiserocesses with primary path nonlinearity, secondary path non-
inearity or the chaotic noise input with non-minimum phaseecondary path. They have not tried their algorithms for a mix-ure of tonal and chaotic noises. The previously proposed nonlineardaptive ANC controllers show degraded convergence performancehen a mixture of tonal and chaotic noise is to be controlled.ecently, a feedforward hybrid ANC algorithm is proposed where
mixture of tonal and broadband noise is considered [32]. Thisas been the basis of our present study. In this paper, the authorsave proposed a new feedforward hybrid ANC algorithm whichonsists of several subsystems such as a sinusoidal noise cancellernd two separate ANC controllers (for broadband and narrowband).his new ANC system has been shown to be effectively cancelinghe mixture of narrowband and broadband noise. The broadbandontroller used in this paper uses a finite impulse response (FIR)
lter as the controller. The FIR controller is adapted using theXLMS algorithm. This controller is a linear controller and doesot have capability to model and predict the nonlinear noise pro-ess such as chaotic noise and hence its control performance ismputing 23 (2014) 51–60
degraded when it is applied to control a mixture of chaotic andtonal noise.
Therefore, the present paper proposes a nonlinear hybrid ANCalgorithm which provides superior noise canceling performance fora mixture of tonal and chaotic noise compared to either the singlenonlinear controller [7] or the hybrid controller [32].
The organization of the rest of the paper is as follows. Section“Chaotic noise” details about the characteristics of various noiseswith emphasis on chaotic noise. The proposed nonlinear hybridalgorithm is presented in Section “Proposed nonlinear hybrid ANCalgorithm”. The computational complexity analysis is presentedin Section “Computational complexity analysis”. The simulationresults are presented in Section “Simulation study”. Section “Con-clusions” concludes the paper.
Chaotic noise
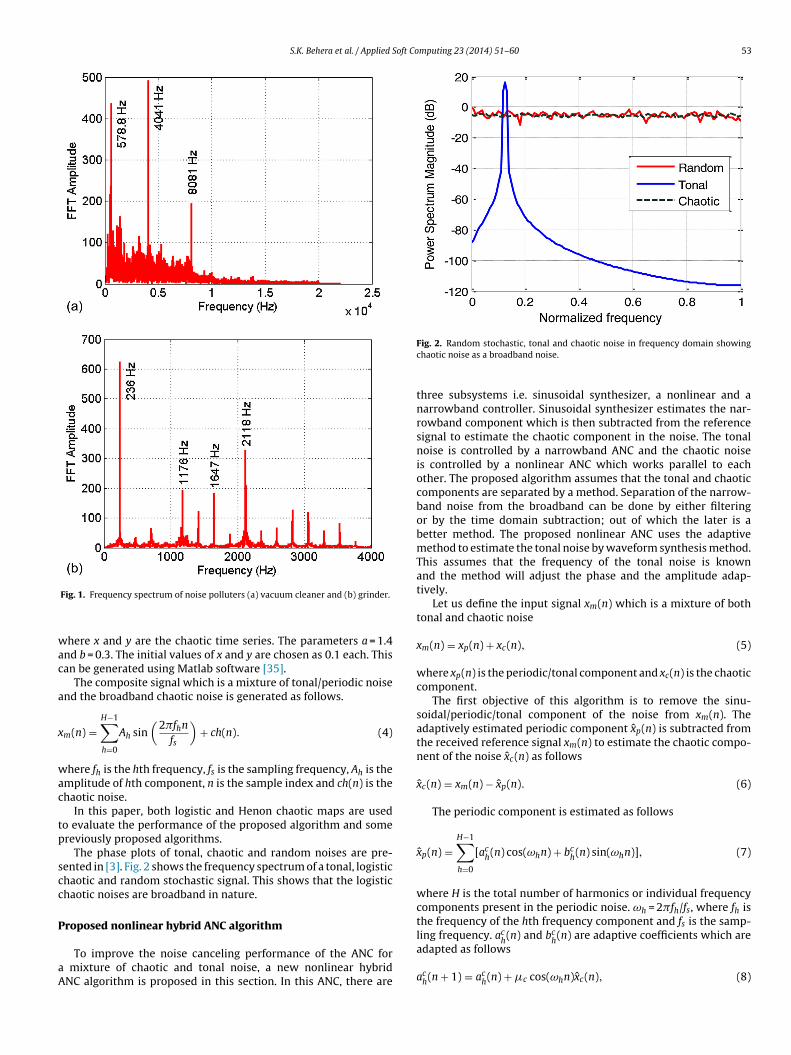
The noise generated from different noise polluters is not simplesinusoidal waves and they belong to nonlinear acoustics [33]. Thenonlinear acoustic waves may not show a simple combination ofdiscrete frequencies but have a complicated dynamic characteris-tic resembling the stochastic behavior. This type of acoustic noiseis also called deterministic chaos or acoustic chaos as defined in[33]. In this paper, we call these types of noise as the chaotic noisewhich is different from both tonal and random noises. The chaoticnoise is mostly broadband and nonlinearly deterministic. There aremany methods to know whether a noise is chaotic or not from dis-crete samples [34]. To get an initial idea about chaotic nature of thenoise, a set of noise samples are plotted with respect to its delayedsamples [3]. The chaotic noise shows dense periodic orbits in sucha plot. The density of periodic orbits means that every point in thespace is approached arbitrarily closely by periodic orbits. There aremany types of chaotic noises such as logistic, Lorenz, Duffing andquadratic [35]. The noise generating from motors and fans has bothtonal and chaotic components. The tonal component is related tothe rotating speed of the fans or motors and the chaotic componentsmay be due to the airfoil noise. The frequency spectrum of noisepolluters such as a vacuum cleaner and a grinder used in house-hold work is shown in Fig. 1. Both the spectrum clearly shows thatthese noises consist of discrete tonal components and other broad-band noises. These broad band noises are assumed to be chaotic innature.
Many synthetic chaotic time series can be generated to simulatethe proposed algorithm. The logistic chaotic noise can be generatedby the following
c(n) = �c(n − 1)[1 − c(n − 1)] (1)
where � = 4 and c(0) = 0.9, n is the time/sample index.The Lorentz chaotic map can be generated by solving the fol-
lowing equations
dx
dt= s(y − x)
dy
dt= rx − y − xz
dz
dt= xy − bz
⎫⎪⎪⎪⎪⎪⎬⎪⎪⎪⎪⎪⎭
(2)
where x, y and z are the chaotic time series with s = 16, r = 45.92 andb = 4; The initial values of x, y and z are chosen as 0.1 each. This canbe generated using Matlab software [35].
The Henon map is simulated by solving⎫
dxdt= 1 − ax2 + y
dy
dt= bx
⎪⎬⎪⎭
(3)
S.K. Behera et al. / Applied Soft Computing 23 (2014) 51–60 53
wac
a
x
wac
tp
scc
P
aA
where H is the total number of harmonics or individual frequencycomponents present in the periodic noise. ωh = 2�fh/fs, where fh isthe frequency of the hth frequency component and fs is the samp-
c c
Fig. 1. Frequency spectrum of noise polluters (a) vacuum cleaner and (b) grinder.
here x and y are the chaotic time series. The parameters a = 1.4nd b = 0.3. The initial values of x and y are chosen as 0.1 each. Thisan be generated using Matlab software [35].
The composite signal which is a mixture of tonal/periodic noisend the broadband chaotic noise is generated as follows.
m(n) =H−1∑h=0
Ah sin(
2�fhn
fs
)+ ch(n). (4)
here fh is the hth frequency, fs is the sampling frequency, Ah is themplitude of hth component, n is the sample index and ch(n) is thehaotic noise.
In this paper, both logistic and Henon chaotic maps are usedo evaluate the performance of the proposed algorithm and somereviously proposed algorithms.
The phase plots of tonal, chaotic and random noises are pre-ented in [3]. Fig. 2 shows the frequency spectrum of a tonal, logistichaotic and random stochastic signal. This shows that the logistichaotic noises are broadband in nature.
roposed nonlinear hybrid ANC algorithm
To improve the noise canceling performance of the ANC for mixture of chaotic and tonal noise, a new nonlinear hybridNC algorithm is proposed in this section. In this ANC, there are
Fig. 2. Random stochastic, tonal and chaotic noise in frequency domain showingchaotic noise as a broadband noise.
three subsystems i.e. sinusoidal synthesizer, a nonlinear and anarrowband controller. Sinusoidal synthesizer estimates the nar-rowband component which is then subtracted from the referencesignal to estimate the chaotic component in the noise. The tonalnoise is controlled by a narrowband ANC and the chaotic noiseis controlled by a nonlinear ANC which works parallel to eachother. The proposed algorithm assumes that the tonal and chaoticcomponents are separated by a method. Separation of the narrow-band noise from the broadband can be done by either filteringor by the time domain subtraction; out of which the later is abetter method. The proposed nonlinear ANC uses the adaptivemethod to estimate the tonal noise by waveform synthesis method.This assumes that the frequency of the tonal noise is knownand the method will adjust the phase and the amplitude adap-tively.
Let us define the input signal xm(n) which is a mixture of bothtonal and chaotic noise
xm(n) = xp(n) + xc(n), (5)
where xp(n) is the periodic/tonal component and xc(n) is the chaoticcomponent.
The first objective of this algorithm is to remove the sinu-soidal/periodic/tonal component of the noise from xm(n). Theadaptively estimated periodic component xp(n) is subtracted fromthe received reference signal xm(n) to estimate the chaotic compo-nent of the noise xc(n) as follows
xc(n) = xm(n) − xp(n). (6)
The periodic component is estimated as follows
xp(n) =H−1∑h=0
[ach(n) cos(ωhn) + bc
h(n) sin(ωhn)], (7)
ling frequency. ah(n) and b
h(n) are adaptive coefficients which are
adapted as follows
ach(n + 1) = ac
h(n) + �c cos(ωhn)xc(n), (8)

5 Soft Co
b
wsfx
cr
y
bb[r
a
y
w
y
aprsa
s
we
s
ue
w
wst
sf
s
lrbf
y
a
b
signals is filtered by the secondary path estimate. If the lengthof the secondary path estimate is L, then the total multiplicationrequirement for filtering through secondary path estimate is ML. If
4 S.K. Behera et al. / Applied
ch(n + 1) = bc
h(n) + �c sin(ωhn)xc(n), (9)
here �c is the step-size of the adaptive sinusoidal cancelationubsystem which adaptively subtract the sinusoidal componentsrom the mixture xm(n) to get broadband chaotic signal estimate
ˆc(n).The ANC control output y(n) is a combination of two separate
ontrollers: broadband and narrowband ANC controllers and areepresented as follows
(n) = yc(n) + yp(n). (10)
The estimated chaotic signal xc(n), is passed through a filter-ank structure of FLANN based ANC [9,11] to generate theroadband control signal yc(n) and the frequency synthesis method32] using the synchronization signal is used to generate the nar-owband control signal yp(n).
The broadband control signal, yc(n), is the sum of the output ofll the adaptive sub-filters, which is computed as
c(n) =2P+1∑i=1
yc,i(n), (11)
here the output of ith adaptive sub-filter of FLANN filter bank is
c,i(n) = sTi (n)wi(n), (12)
nd wi(n) = [wi,0(n) wi,1(n). . .wi,N−1(n)]T , i = 1, . . ., 2P + 1, is an N-oint coefficient vector of the ith controller at time n. Here, Nepresents the memory size, P is the order of the functional expan-ion. The input signal vector of the adaptive filter is representeds
i(n) = [si(n)si(n − 1). . .si(n − N + 1)]T , (13)
hich contains N recent samples of the functionally expanded ref-rence input xc(n). Here for 1 ≤ l ≤ P,
i(n) =
⎧⎪⎨⎪⎩
xc(n), if i = 1
sin[l�xc(n)], if i is even
cos[l�xc(n)], if i is odd
. (14)
The weight parameters of the nonlinear controller, wi(n), arepdated using the error microphone signal e(n). The weight updatequation is as follows:
i(n + 1) = wi(n) − �ie(n)s′i(n), (15)
here �i denotes the step-size which controls the convergencepeed of the FSLMS algorithm. The filtered reference signal vec-or, s′
i(n) = [s′
i(n)s′
i(n − 1), . . ., s′
i(n − N + 1)]T , is formed by filtering
i(n) through the secondary path estimate transfer function S(z) asollows
′i(n) = S(z)si(n). (16)
The narrowband/tonal control signal yp(n) is generated as fol-ows, where it is assumed that the frequencies ωh’s are known. Hepresents total number of sinusoidal components in the narrow-and signal. The narrowband signal sample are online computed asollows
p(n) =H−1∑h=0
[ah(n) cos(ωhn) + bh(n) sin(ωhn)]. (17)
The adaptive coefficients, a (n) and b (n) are adapted as follows
h hh(n + 1) = ah(n) + �pxc′h (n)e(n), (18)
h(n + 1) = bh(n) + �pxs′h (n)e(n), (19)
mputing 23 (2014) 51–60
where �p is the step-size of the adaptive narrowband controller.xc′
h(n) and xs′
h(n) are the filtered cosine and sine components of each
harmonics, h and are computed as follows
xc′h (n) = S(z)Xc
h(z), (20)
xs′h (n) = S(z)Xs
h(z), (21)
where Xch(z) and Xs
h(z) are the Z transform of xc
h(n) and
xsh(n) with xc
h(n) = cos(ωhn) and xs
h(n) = sin(ωhn). The right hand
side of (20) and (21) represent the filtering of xch
= cos(ωhn)and xc
h= sin(ωhn) respectively through secondary path estimate
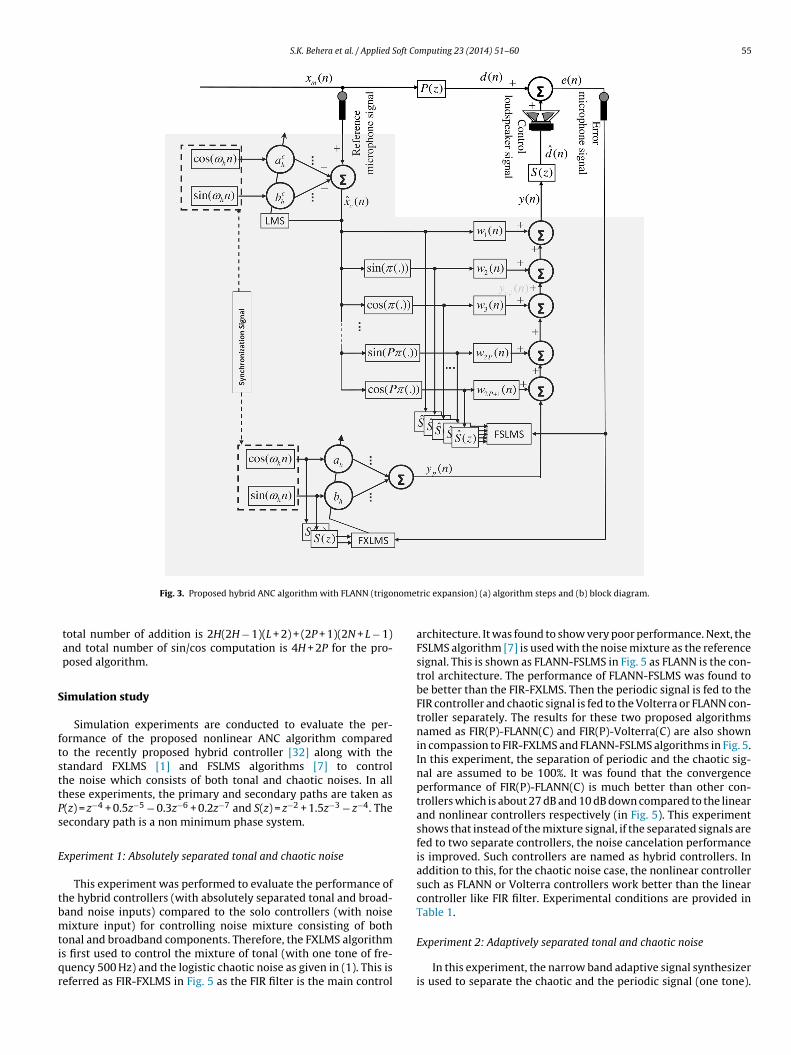
S(z).The complete algorithm is shown in Fig. 3(a). The block dia-
gram of the complete system is presented in Fig. 3(b) with theproposed algorithm in the shaded portion. The algorithm takesthe reference and error microphone signals as input and gener-ates antinoise through control loudspeaker. In comparison to thework published in Ref. [32] the present algorithm has an extrastep (Step-5) where the reference chaotic signal is functionallyexpanded and Step 6 is an FIR filter operation with xc(n) as itsinput. Similarly, in conventional FLANN [7] operations in Steps-2, 3, 4, 7, 8 and the tonal part of algorithm in Step-10 was notinvolved. The reference signal xm(n) is directly used in Step-5 inplace of xc(n).
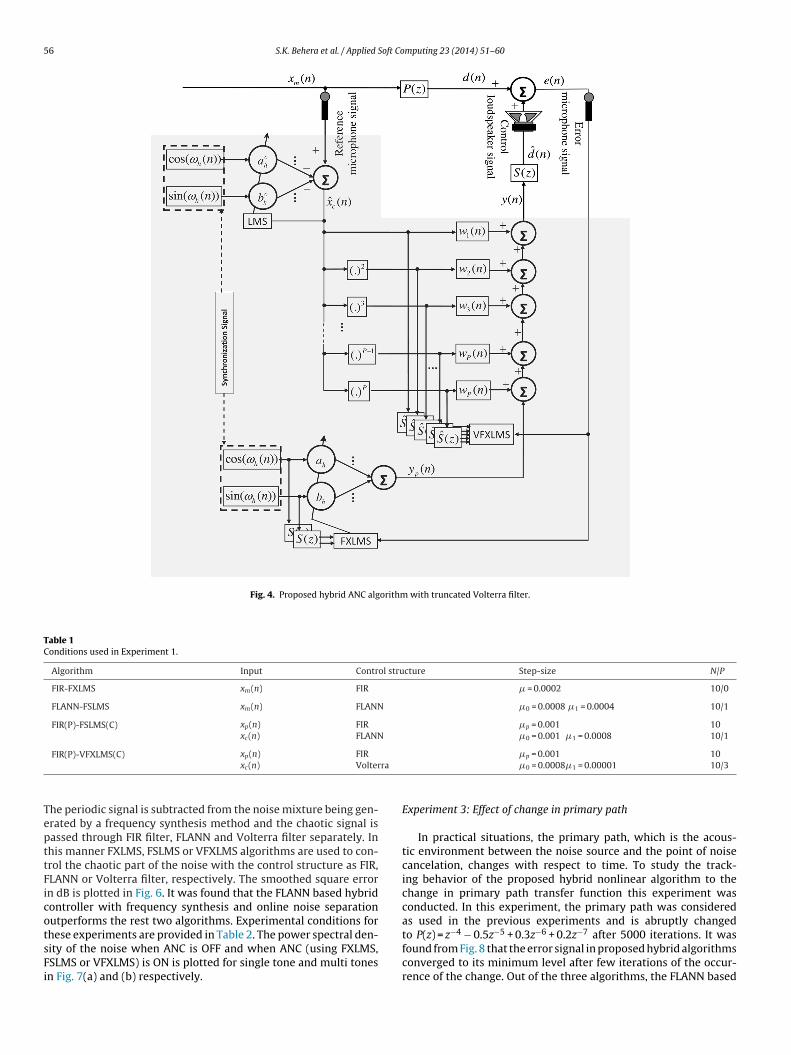
Power series expansion or truncated Volterra series expansion
In Volterra series expansion [11], the input signal is expandedas power series and product of present and delayed inputs. To usethe Volterra series expansion in the above proposed algorithm, onecan choose truncated version where the cross-terms (product ofdissimilar delayed inputs) are removed from the Volterra seriesmaking it a power series expansion. The power series expansion ofthe estimated broadband chaotic reference signal xc(n) replaces thesin–cos blocks of Fig. 3(b) and is shown in Fig. 4. In this algorithmEq. (14) is replaced by
si = (xc)i, (22)
where the power i = 0, 1, 2, . . ., P. si(n) is nothing but the ithpower of the xc(n). P is the order of the truncated Volterra filtercontroller.
Computational complexity analysis
The computational complexity of the proposed algorithm isslightly more than the hybrid ANC algorithm proposed in Ref. [4].The complexity of the sinusoidal synthesizer and the narrowbandcontroller are same in both these algorithms but the computationalcomplexity of the broadband controller using FLANN is propor-tional to the total number of expansion. In Pth order FLANN withtrigonometric expansion, there are M = 2P + 1 number of functionalexpansions of the broadband reference signal xc(n). If N is the num-ber of the filter coefficients in each filters of the filter bank, thenthere are NM multiplications to generate the broadband outputcomponent. In addition to this, each of these functionally expanded
there are H sinusoidal components present in the noise then therequirement of
total number of multiplication is 2H(L + 4)(2P + 1)(2N + L),
S.K. Behera et al. / Applied Soft Computing 23 (2014) 51–60 55
nome
S
ftsttPs
E
tbmtiqr
Fig. 3. Proposed hybrid ANC algorithm with FLANN (trigo
total number of addition is 2H(2H − 1)(L + 2) + (2P + 1)(2N + L − 1)and total number of sin/cos computation is 4H + 2P for the pro-posed algorithm.
imulation study
Simulation experiments are conducted to evaluate the per-ormance of the proposed nonlinear ANC algorithm comparedo the recently proposed hybrid controller [32] along with thetandard FXLMS [1] and FSLMS algorithms [7] to controlhe noise which consists of both tonal and chaotic noises. In allhese experiments, the primary and secondary paths are taken as(z) = z−4 + 0.5z−5 − 0.3z−6 + 0.2z−7 and S(z) = z−2 + 1.5z−3 − z−4. Theecondary path is a non minimum phase system.
xperiment 1: Absolutely separated tonal and chaotic noise
This experiment was performed to evaluate the performance ofhe hybrid controllers (with absolutely separated tonal and broad-and noise inputs) compared to the solo controllers (with noiseixture input) for controlling noise mixture consisting of both
onal and broadband components. Therefore, the FXLMS algorithms first used to control the mixture of tonal (with one tone of fre-uency 500 Hz) and the logistic chaotic noise as given in (1). This iseferred as FIR-FXLMS in Fig. 5 as the FIR filter is the main control
tric expansion) (a) algorithm steps and (b) block diagram.
architecture. It was found to show very poor performance. Next, theFSLMS algorithm [7] is used with the noise mixture as the referencesignal. This is shown as FLANN-FSLMS in Fig. 5 as FLANN is the con-trol architecture. The performance of FLANN-FSLMS was found tobe better than the FIR-FXLMS. Then the periodic signal is fed to theFIR controller and chaotic signal is fed to the Volterra or FLANN con-troller separately. The results for these two proposed algorithmsnamed as FIR(P)-FLANN(C) and FIR(P)-Volterra(C) are also shownin compassion to FIR-FXLMS and FLANN-FSLMS algorithms in Fig. 5.In this experiment, the separation of periodic and the chaotic sig-nal are assumed to be 100%. It was found that the convergenceperformance of FIR(P)-FLANN(C) is much better than other con-trollers which is about 27 dB and 10 dB down compared to the linearand nonlinear controllers respectively (in Fig. 5). This experimentshows that instead of the mixture signal, if the separated signals arefed to two separate controllers, the noise cancelation performanceis improved. Such controllers are named as hybrid controllers. Inaddition to this, for the chaotic noise case, the nonlinear controllersuch as FLANN or Volterra controllers work better than the linearcontroller like FIR filter. Experimental conditions are provided inTable 1.
Experiment 2: Adaptively separated tonal and chaotic noise
In this experiment, the narrow band adaptive signal synthesizeris used to separate the chaotic and the periodic signal (one tone).
56 S.K. Behera et al. / Applied Soft Computing 23 (2014) 51–60
Fig. 4. Proposed hybrid ANC algorithm with truncated Volterra filter.
Table 1Conditions used in Experiment 1.
Algorithm Input Control structure Step-size N/P
FIR-FXLMS xm(n) FIR � = 0.0002 10/0
FLANN-FSLMS xm(n) FLANN �0 = 0.0008 �1 = 0.0004 10/1
FIR(P)-FSLMS(C) xp(n) FIR �p = 0.001 10xc(n) FLANN �0 = 0.001 �1 = 0.0008 10/1
ra
TepttFicotsFi
FIR(P)-VFXLMS(C) xp(n) FIR
xc(n) Volter
he periodic signal is subtracted from the noise mixture being gen-rated by a frequency synthesis method and the chaotic signal isassed through FIR filter, FLANN and Volterra filter separately. Inhis manner FXLMS, FSLMS or VFXLMS algorithms are used to con-rol the chaotic part of the noise with the control structure as FIR,LANN or Volterra filter, respectively. The smoothed square errorn dB is plotted in Fig. 6. It was found that the FLANN based hybridontroller with frequency synthesis and online noise separationutperforms the rest two algorithms. Experimental conditions for
hese experiments are provided in Table 2. The power spectral den-ity of the noise when ANC is OFF and when ANC (using FXLMS,SLMS or VFXLMS) is ON is plotted for single tone and multi tonesn Fig. 7(a) and (b) respectively.�p = 0.001 10�0 = 0.0008�1 = 0.00001 10/3
Experiment 3: Effect of change in primary path
In practical situations, the primary path, which is the acous-tic environment between the noise source and the point of noisecancelation, changes with respect to time. To study the track-ing behavior of the proposed hybrid nonlinear algorithm to thechange in primary path transfer function this experiment wasconducted. In this experiment, the primary path was consideredas used in the previous experiments and is abruptly changed
to P(z) = z−4 − 0.5z−5 + 0.3z−6 + 0.2z−7 after 5000 iterations. It wasfound from Fig. 8 that the error signal in proposed hybrid algorithmsconverged to its minimum level after few iterations of the occur-rence of the change. Out of the three algorithms, the FLANN based
S.K. Behera et al. / Applied Soft Computing 23 (2014) 51–60 57
Table 2Conditions used in Experiment 2.
Algorithm Purpose Input Control structure Step-size N/P
FXLMS Sinusoidal noise cancellersin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �c = 0.01 –
Broadband ANC xc(n) FIR �0 = 0.001 10
Narrowband ANCsin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �p = 0.0008 –
VFXLMS Sinusoidal noise cancellersin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �c = 0.01 –
Broadband ANC xc(n) Volterra �0 = 0.001�1 = 0.00001 10/3
Narrowband ANCsin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �p = 0.0008 –
FLANN Sinusoidal noise cancellersin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �c = 0.01 –
Broadband ANC xc(n) FLANN �0 = 0.001 �1 = 0.0008 10/1
Narrowband ANCsin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �p = 0.01 –
Fig. 5. Convergence performance comparison of conventional and hybrid algo-rithms assuming separate periodic and chaotic noise sources are available.
Fig. 6. Convergence performance comparison of three hybrid algorithms where thechaotic signal is controlled by FXLMS, Volterra and FLANN algorithms. The periodicand chaotic noise are separated online.
Fig. 7. PSD of the noise with and without ANC (a) single tone and (b) multi-tone.

58 S.K. Behera et al. / Applied Soft Computing 23 (2014) 51–60
F
aa
Ec
oectwagFpm
Ef
nomsir
Fi
Fig. 10. (a) Comparative plot of mean square error of the chaotic separation from
ig. 8. Convergence performance with primary path change at 5000 iterations.
lgorithm outperforms both FXLMS and the Volterra filter basedlgorithms.
xperiment 4: Effect of change in the relative amplitude of tonalomponents
In certain practical situations, the tonal components of the peri-dic noise vary with respect to their relative amplitudes. It isxpected that the adaptive algorithm should be able to adapt itsoefficients to cope with such change in relative amplitudes. Inhis experiment the amplitude of 500 Hz, 1000 Hz and 1500 Hzas initially taken same and equal to 1 till 5000 iterations and
fter that the amplitude ratio was chosen as 1:2:3. The conver-ence of the smoothed mean square error in dB is plotted inig. 9 for all the three algorithms. Out of the three algorithms, theroposed FLANN based hybrid algorithm showed the best perfor-ance.
xperiment 5: Effect of error in separation of tonal componentrom noise mixture
To study the effect of the error in separation of tonal compo-ent from the noise mixture to get the chaotic component on theverall performance of the ANC mean square error, this experi-
ent is conducted. The adaptive waveform synthesis method ashown in Fig. 3(b) is used for separation. The step size �c usedn Eqs. (8) and (9) controls the speed of convergence. Two sepa-ate simulations were performed with �c = 0.01 (fast separation)
ig. 9. Convergence performance with change in amplitude of harmonics at 5000terations.
the mixture of noise and the overall ANC performance for two different step size ofadaptive separation. (b) Time domain plots of samples of noise mixture before andafter separation.
and �c = 0.001 (slow separation). The fast separation convergencesfaster with a higher steady state mean square error. Where as theslow separation has a lower steady state mean square error withrelatively slower convergence. The comparative plots of separationerror and the overall ANC error are shown in Fig. 10(a). Fig 10(b)shows the time domain signal samples for different acoustic noisessuch as mixture of chaotic and tonal noise, only chaotic noise, esti-mated chaotic noise (adaptively separated chaotic noise) and theerror in separation. This shows that the adaptive tonal componentseparation based on a waveform synthesis method is capable ofseparating the tonal component from the mixture of chaotic andtonal noise. This experiment also shows that the slower conver-gence in separation leads to better ANC performance.
Experiment 6: Recorded noise
This experiment was conducted by taking a recorded noise froma home grinder. The sampling frequency was 8 kHz. First the fre-quency spectrum was plotted using fast Fourier transform (FFT)to know the discrete frequency content. As seen in Fig. 1(b), thereare many discrete frequencies such as 236 Hz and 2118 Hz. Thesetwo frequencies are removed from the composite signal and theproposed algorithm is applied. The whole signal is used while sim-ulating FLANN (Das and Panda [7]). However, the separated signalsare used in hybrid algorithms of [32] and the proposed one. It isfound in Fig. 11 that the proposed FLANN based hybrid controller
out perform the other two algorithm in term of faster convergenceand minimum mean square error. In addition to this, the frequencyspectra of the noise before and after cancelation at different fre-quency ranges are shown in Fig. 12. In this study, either single
S.K. Behera et al. / Applied Soft Computing 23 (2014) 51–60 59
Table 3Conditions used in Experiment 7.
Algorithm Purpose Input Control Structure Step-size N/P
FIR-FXLMS ANC xm(n) FIR � = 0.006 10/0
FLANN-FSLMS ANC xm(n) FLANN �0 = 0.006�1 = 0.002 10/1
Hybrid FIR Sinusoidal noise cancellersin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �C = 0.003 –
Broadband ANC xc(n) FIR �0 = 0.006 10
Narrowband ANCsin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �p = 0.001 –
Hybrid VFXLMS Sinusoidal noise cancellersin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �c = 0.003 –
Broadband ANC xc(n) Volterra Filter �0 = 0.006�1 = 0.004 10/3
Narrowband ANCsin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �p = 0.001 –
Hybrid FLANN Sinusoidal noise cancellersin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �c = 0.003 –
Broadband ANC xc(n) FLANN �0 = 0.006�1 = 0.002 10/1
Narrowband ANCsin[ωh(n)]cos[ωh(n)]
Multiplication coefficients �p = 0.001 –
fsquctt
Fig. 11. Mean square error with recorded noise.
requency 236 Hz or double frequency 236 Hz and 2118 Hz wereeparated and the responses are plotted in Fig. 12 as single fre-uency separator (FS) and double FS. In addition, the residual noisesing conventional FLANN and making ANC off was also plotted for
omparison. It was seen that the proposed nonlinear hybrid con-roller with either single or double FS shows superior performanceo the conventional FLANN controller.Fig. 12. Frequency spectrum of noise before and after cancelat
Fig. 13. Mean square error with Henon chaotic noise mixture.
Experiment 7
In this experiment the Henon type chaotic map as shown in Eq.(3) is used to generate the chaotic noise. The tonal signal of fre-quency 200 Hz, amplitude 0.5 sampled at 1000 Hz and the chaotic
noise with power 0.04 were mixed for generating the mixture noisefor this simulation. The FXLMS [1], FSLMS [7] the hybrid FIR [32] andthe two proposed nonlinear hybrid structures were simulated. Theion (a) 150–500 Hz, (b) 900–1500 Hz, (c) 1550–1800 Hz.

6 Soft Co
iiTnb
C
sttTcsTtccnacnwua
A
ucmi
R
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[
[34] J.S. Armand Eyebe Fouda, J. Yves Effa, M. Kom, M. Ali, The three-state test for
0 S.K. Behera et al. / Applied
nput signal, corresponding control structure and step sizes usedn different algorithms used in this experiment are presented inable 3. It is shown in Fig. 13 that the for Henon type of chaoticoise also, the proposed FLANN based hybrid structure shows theest performance among all the algorithms.
onclusions
In this paper, it has been shown that many practical noiseources are a mixture of tonal and chaotic noise. Many conven-ional ANC algorithms use this noise mixture as the reference signalo generate the antinoise, which have suboptimal performance.he present paper proposes an algorithm which first separates thehaotic signal from the noise mixture and the estimated chaoticignal was used in a FLANN/Voterra based nonlinear controller.he tonal component uses a frequency synthesis method to con-rol the tonal part. Therefore, this algorithm uses a narrow bandontroller and a broadband controller. Hence it is called as hybridontroller. The proposed hybrid nonlinear controller shows greateroise reduction capability compared to many previously publishedlgorithms such as FXLMS, FSLMS and hybrid ANC. Exhaustiveomputer simulation experiments with single and multitone sig-al mixed with synthetic chaotic signal (logistic and Henon map)ere performed. In addition to this, a recorded grinder noise wassed in the simulation study to show the efficacy of the proposedlgorithm.
cknowledgements
Authors acknowledge CSIR-IMMT for funding this research worknder OLP-49 project and CSIR for funding YSP-3/2013 project toarry out part of this work. Authors also acknowledge the anony-ous reviewers for their valuable suggestions which helped in
mproving the quality of the paper.
eferences
[1] S.M. Kuo, D.R. Morgan, Active noise control: a tutorial review, Proc. IEEE 87 (6)(1999) 943–973.
[2] C.H. Hansen, S. Snyder, Q. Xiaojun, L. Brooks, D. Moreau, Active Control of Noiseand Vibration, 2nd ed., CRC Press, Florida, 2013.
[3] D.P. Das, D.J. Moreau, B.S. Cazzolato, A nonlinear active noise control algorithmfor virtual microphones controlling chaotic noise, J. Acoust. Soc. Am. 132 (2)(2012) 779–788.
[4] S.B. Behera, D.P. Das, N.K. Rout, Nonlinear feedback active noise control forbroadband chaotic noise, Appl. Soft Comput. 15 (2014) 80–87.
[5] P. Strauch, B. Mulgrew, Active control of non linear noise processes in a linearduct, IEEE Trans. Signal Process. 46 (1998) 2404–2412.
[6] L. Tan, J. Jiang, Adaptive Volterra filters for active control of nonlinear noiseprocesses, IEEE Trans. Signal Process. 49 (8) (2001) 667–1676.
[7] D.P. Das, G. Panda, Active mitigation of nonlinear noise processes using a
novel filtered-s LMS algorithm, IEEE Trans. Speech Audio Process. 12 (3) (2004)313–322.[8] G.L. Sicuranza, A.C. Carini, Filtered-X affine projection algorithm for multichan-nel active noise control using second-order Volterra filters, IEEE Signal Process.Lett. 11 (11) (2004) 853–857.
[
mputing 23 (2014) 51–60
[9] D.P. Das, S.R. Mohapatra, A. Routray, T.K. Basu, Filtered-s LMS algorithm for mul-tichannel active noise control of nonlinear noise processes, IEEE Trans. AudioSpeech Lang. Process. 14 (5) (2006) 1875–1880.
10] D. Zhou, V. DeBrunner, Efficient adaptive nonlinear filters for nonlinear activenoise control, IEEE Trans. Circuits Syst. I, Reg. Papers 54 (3) (2007) 669–681.
11] E.P. Reddy, D.P. Das, K.M.M. Prabhu, Fast adaptive algorithms for active con-trol of nonlinear noise processes, IEEE Trans. Signal Process. 56 (9) (2008)4530–4536.
12] S.D. Snyder, Active control of vibration using a neural network, IEEE Trans.Neural Netw. 6 (1995) 819–828.
13] M. Bouchard, B. Paillard, C.T.L. Dinh, Improved training of neural networks forthe nonlinear active noise control of sound and vibration, IEEE Trans. NeuralNetw. 10 (1999) 391–401.
14] R.T. Bambang, Adjoint EKF learning in recurrent neural networks for nonlinearactive noise control, Appl. Soft Comput. 8 (4) (2008) 1498–1504.
15] Q.Z. Zhang, W.S. Gan, Active noise control using a simplified fuzzy neural net-work, J. Sound Vib. 272 (2004) 437–449.
16] C.Y. Chang, F.B. Luoh, Enhancement of active noise control using neural-basedfiltered-X algorithm, J. Sound Vib. 305 (1–2) (2007) 348–356.
17] N.V. George, G. Panda, Advances in active noise control: a survey, with emphasison recent nonlinear technique, Signal Process. 93 (2) (2013) 363–377.
18] J.C. Patra, R.N. Pal, B.N. Chatterji, G. Panda, Identification of nonlinear dynamicsystem using functional link artificial neural networks, IEEE Trans. Syst. ManCybern. B 29 (1999) 254–262.
19] D.P. Das, G. Panda, D.K. Nayak, Development of frequency domain blockfiltered-s LMS (FBFSLMS) algorithm for active noise control system, in: Proc.IEEE Int. Conf. Acoust., Speech, Signal Process. ICASSP-2006, France, 2006, pp.289–292.
20] D.P. Das, D.J. Moreau, B. Cazzolato, Nonlinear active noise control with vir-tual sensing technique, in: Proc. ISSNIP-2010, Brisbane, Australia, 2010, pp.321–326.
21] D.P. Das, D.J. Moreau, B.S. Cazzolato, Adjoint nonlinear active noise con-trol algorithm for virtual microphone, Mech. Syst. Signal Process. 27 (2012)743–754.
22] D.P. Das, D.J. Moreau, B.S. Cazzolato, Nonlinear active noise control for head-rest using virtual microphone control, Control Eng. Pract. 21 (4) (2013)544–555.
23] G.L. Sicuranza, A.C. Carini, On the BIBO stability condition of adaptive recursiveFLANN filters with application to nonlinear active noise control, IEEE Trans.Audio Speech Lang. Process. 20 (1) (2011) 234–245.
24] H. Zhao, X. Zeng, J. Zhang, Adaptive reduced feedback FLNN nonlinear filter foractive control of nonlinear noise processes, Signal Process. 90 (2010) 834–847.
25] G.L. Sicuranza, A.C. Carini, A generalized FLANN filter for nonlinear active noisecontrol, IEEE Trans. Audio Speech Lang. Process. 19 (8) (2011) 2412–2417.
26] R. Napoli, L. Piroddi, Nonlinear active noise control with NARX models, IEEETrans. Audio Speech Lang. Process. 18 (2) (2010) 286–295.
27] S.M. Kuo, H.T. Wu, Nonlinear adaptive bilinear filters for active noise controlsystems, IEEE Trans. Circuits Syst.—I 52 (3) (2005) 617–624.
28] S. Purwar, I.N. Kar, A.N. Jha, On-line system identification of complex systemsusing Chebyshev neural networks, Appl. Soft Comput. 7 (1) (2007) 364–372.
29] M.A. Denaï, F. Palis, A. Zeghbib, Modeling and control of non-linear systemsusing soft computing techniques, Appl. Soft Comput. 7 (3) (2007) 728–738.
30] C.F. Hsu, A self-evolving functional-linked wavelet neural network for controlapplications, Appl. Soft Comput. 13 (11) (2013) 4392–4402.
31] C.F. Hsu, C.M. Lin, R.G. Yeh, Supervisory adaptive dynamic RBF-based neural-fuzzy control system design for unknown nonlinear systems, Appl. SoftComput. 13 (4) (2013) 1620–1626.
32] Y. Xiao, J. Wang, A new feedforward hybrid active noise control system, IEEESignal Process. Lett. 18 (10) (2011) 591–594.
33] W. Lauterborn, Nonlinear acoustics and acoustic chaos, sound-flow interac-tions, Lect. Notes Phys. 586 (2002) 265–284.
chaos detection in discrete maps, Appl. Soft Comput. 13 (12) (2013) 4731–4737.35] Mtalab Chaotic Systems Toolbox available in http://www.mathworks.
in/matlabcentral/fileexchange/1597-chaotic-systems-toolbox (accessed on04.01.13).