effective use of magnetometer feedback for smart ... · effective use of magnetometer feedback for...
TRANSCRIPT
Effective Use of Magnetometer Feedback forSmart Projectile Applications
JONATHAN ROGERS and MARK COSTELLOGeorgia Institute of Technology, Atlanta, GA, 30332
THOMAS HARKINSUS Army Research Laboratory, Aberdeen, MD, 21001
MOSHE HAMAOUIData Matrix Solutions, Inc., Aberdeen, MD, 21001
Received September 2010; Revised March 2011
ABSTRACT: The use of magnetometers for orientation estimation on rapidly-spinning flight bodies is analyzed.Specifically, the effect of spin-induced magnetic field distortion is discussed, with particular attention to its impli-cations for magnetometer-based orientation estimation. First, the nature of spin-induced field distortion isdescribed and it is shown that, if not properly accounted for, distortion can lead to significant estimation errorsin artillery projectiles. Then, an orientation estimator is constructed driven by magnetometer, gyroscope, andGPS feedback. A novel feature of this algorithm is its compensation for spin-induced distortion of the Earth’sfield. The algorithm also incorporates in-flight magnetometer calibration performed simultaneously with projec-tile orientation estimation. The comprehensive algorithm is built as a coupled set of Extended Kalman filters.Observability of the estimation problem is discussed and unobservable modes are identified. Finally, exampleresults and Monte Carlo simulations compare estimation performance to algorithms which neglect spin-induceddistortion effects or do not perform in-flight calibration. These results demonstrate that magnetometer-based sys-tems on-board spinning projectiles should incorporate corrections for field distortion, and that overall accuracy isgreatly enhanced by performing in-flight calibration.
INTRODUCTION
The availability of low-cost, lightweight sensorsand digital microprocessors has enabled weaponsdesigners to equip artillery projectiles with fullguidance and control capability. However, in com-parison to electronics packages on-board missiles,projectile sensor suites and guidance units must beable to withstand large acceleration loads at launchand high spin rates while maintaining low cost.One challenge routinely faced by designers hasbeen the development of attitude estimators forthese vehicles. While accurate attitude informationis critical to control system performance, it isoften impossible to obtain by integrating outputsfrom low-cost rate sensors. One common solutionis to use magnetometer measurements to provideperiodic updates to integrated rate sensor data.Magnetometers are attractive due to their lowpower requirements, rugged construction, and lowcost.
The use of magnetometers to obtain orientationinformation is not a new idea and has been used formany types of flight vehicles, from satellites toUAVs. Typically, an algorithm is employed to deter-mine a solution for the direction cosines matrix(DCM), Euler angles, or quaternions of the vehiclebased on a set of magnetometer measurements.Wahba [1, 2] initially proposed a batch least squarestechnique for determining the DCM of a satellitebased on vector measurements. Other researchersproposed purely deterministic methods [3] and re-cursive algorithms [4] for computing the DCM. Bar-Itzhak and Oshman [5] extended this work by devel-oping a method for recursively estimating quatern-ions from a set of vector measurements. Similaralgorithms [6] were developed for Euler angle deter-mination. Most recently, Mortari [7] has shown thatwhen using more than two vector measurements,the optimal Euler axis and the principle Euler anglecan be obtained separately without iterative proce-dures. Psiaki [8] developed a magnetometer-onlyattitude and angular rate estimator for low-costspacecraft and showed reasonable performanceusing flight data.
NAVIGATION: Journal of The Institute of NavigationVol. 58, No. 3, Fall 2011Printed in the U.S.A.
203

While much of the above research has beendirected toward spacecraft applications, several in-vestigators in the projectile community have re-cently developed algorithms specifically tailored tosmart projectiles. Ohlmeyer, Fraysse, and Pepitone[9] incorporated magnetometers in a low-cost INSalong with accelerometers and GPS. Magnetometerbias was estimated in-flight to improve perform-ance. Wilson [10] also proposed the use of magneto-meters as the primary attitude sensor on-boardsmart projectiles. He showed that complete attitudesolutions could be obtained only by combining mag-netometers with additional sensors such as acceler-ometers or solar sensors. Most recently, Lee et al.[11] developed a roll attitude estimator for smartmunitions using magnetometers based on anunscented Kalman filter.
Two recurring problems have consistently hin-dered efforts to implement magnetometer-basedestimators on-board guided artillery shells. The firstis that distortion and attenuation of the Earth’s mag-netic field can be significant inside the body of a spin-ning projectile due to the formation of eddy currentswithin the conducting metallic body. Harkins [12]has explored this phenomenon experimentally, con-cluding that these effects can lead to significanterror in magnetometer-based estimators if propercompensation is not used. The second, and perhapsless application-specific, is that bias, scale factor,and misalignment errors can often have significantdetrimental impact on overall attitude estimationperformance. Calibration values, especially bias, canchange during launch or in flight. Several techni-ques have previously been developed to mitigate thisproblem by performing on-line estimation of thesenuisance parameters (autocalibration). Lerner andShuster [13] first developed a method to estimatemagnetometer nuisance parameters on-board space-craft given a priori knowledge of attitude. Alonsoand Shuster [14–16] have proposed so-called‘‘attitude independent’’ autocalibration methods forspacecraft that rely on changes in the Earth’s mag-netic field magnitude over one orbit cycle. Crassidiset al. [17] expanded on this work, developing threealgorithms to perform real-time magnetometer cali-bration based on observed differences in field magni-tude. Most recently, Gebre-Egziabher [18] developedan autocalibration algorithm for UAVs by fitting anellipsoid to measured magnetic field data. Magne-tometer data used to define this ellipsoid is gener-ated by rotating the vehicle through prescribedturns during the calibration process.
Previously-developed autocalibration algorithmsare for the most part unsuitable for projectile appli-cations for several reasons. First, the Earth’s mag-netic field does not change enough throughoutflight to employ attitude-independent solutions.Second, prescribed calibration maneuvers such as
those outlined in [18] are typically not an optionduring projectile flight. Standard pre-flight sensorcalibration procedures using reference sensors aretoo expensive given the low-cost nature of gun-launched munitions, and cannot account for cali-bration changes after launch due to large shocks.Although it may be possible to develop sensors thatmaintain calibration through launch and do notrequire extensive calibration, cost considerationsfor projectile applications make this solution lessattractive. Thus, new techniques are required toperform in-flight estimation of as many nuisanceparameters as possible.
The contributions of this article are twofold.First, an in-depth analysis of the problem of mag-netic field distortion inside projectile bodies is pre-sented. An analytical model for this field distortionis built and compared to experimental results.A new magnetometer model is built which incorpo-rates this distortion, and is used to generate anExtended Kalman filter that estimates field distor-tion parameters. The second main contribution isthe development of a coupled set of Extended Kal-man filters that estimate projectile orientation, nui-sance parameters, and distortion effects simultane-ously. Using this filter, a direct analysis of the bene-fits of in-flight nuisance parameter and fielddistortion estimation is performed. This is accom-plished through example and Monte Carlo simula-tions in which performance of estimators with andwithout the capability to perform in-flight nuisanceand distortion parameter identification is directlycompared. Results show a significant benefit to in-corporating distortion effects and performing nui-sance parameter estimation in flight. The articlebegins by describing magnetic field distortion withinrapidly-spinning projectile bodies. Then, algorithmsare developed to estimate distortion effects, magne-tometer nuisance parameters, and projectile orien-tation simultaneously. An observability analysis ofthe entire estimation problem is then performed andunobservable parameters are identified. Finally,simulation results show that attitude estimationperformance is almost always improved when dis-tortion effects are incorporated and nuisance param-eter estimation is performed.
SPIN-INDUCED MAGNETIC FIELD DISTORTION
When a conductive body is subjected to a chang-ing magnetic field, eddy current effects occur insidethe body. Equivalently, a spinning cylinder im7-mersed in a transverse uniform magnetic field isessentially subject to two radial oscillating fieldswhich are 90 degrees apart in space and time. ByFaraday’s law, these oscillating magnetic fields willinduce electric fields according to
204 Navigation Fall 2011
r 3 ~E ¼ 2@~B
@t(1)
If the cylinder is conductive, eddy currents willbe induced to flow along the length of the cylinder.These currents in turn give rise to a secondarymagnetic field which, in superposition with theexternal field, creates a distorted magnetic field inand around the cylinder [19]. Because on-boardelectronics packages used for smart weapon guid-ance and control are located within a rapidly spin-ning projectile body, magnetometer-based orienta-tion estimators must compensate for this field dis-tortion to avoid significant error.
Modeling Spin-Induced Distortion:Infinite Cylinder
Maxwell’s equations lead to a diffusion equationfor the magnetic vector potential describing thetime evolution of the magnetic field, given by
r2~A ¼ lr@~A
@t(2)
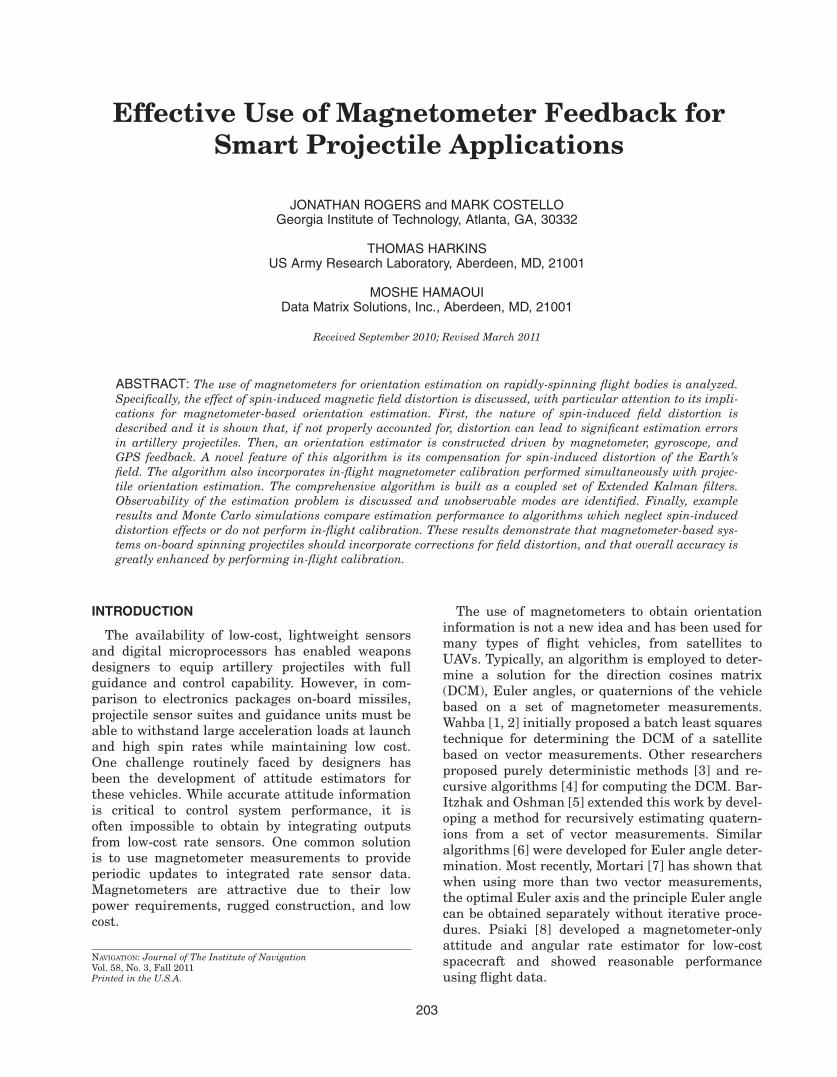
where ~A is the magnetic vector potential, l is themagnetic permeability, and r is the electrical con-ductivity. Note that in the above equation the sim-plifying assumption that the displacement currentin Maxwell’s equations is negligible is made, sinceprojectile spin rates correspond to wavelengths thatare orders of magnitude larger than typical projec-tile body dimensions. Recently, Ziolkowski and Gra-bowski [20] imposed appropriate boundary condi-tions on Equation (2) to obtain an analytic solutionfor the case of an infinite, hollow cylinder spinningin a uniform, transverse magnetic field. Figure 1shows magnetic field lines for an infinite, non-magnetic, conducting cylinder of inner radius 50mm and outer radius 75 mm rotating counterclock-wise at a rate of 20 rad/s placed in a constant trans-verse external field (computed using the expressionsfrom reference [20]). Note that, for an infinitely-longconducting cylinder, the field inside the body is uni-form (i.e., constant distortion angle throughout) andattenuated with respect to the external transversefield. Any axial component of the external field isunaffected for cylinders of infinite length.
Modeling Spin-Induced Distortion: Finite Cylinder
For cylinders of finite length, no closed-form solu-tion for the magnetic field is possible. Thus, finiteelement methods must be employed to model mag-netic field distortion inside rotating bodies of finitelength. To analyze distortion effects for finitebodies, a finite element (FE) model was constructedusing ANSYS software. First, for validation pur-poses, the FE model was used to generate the spin-
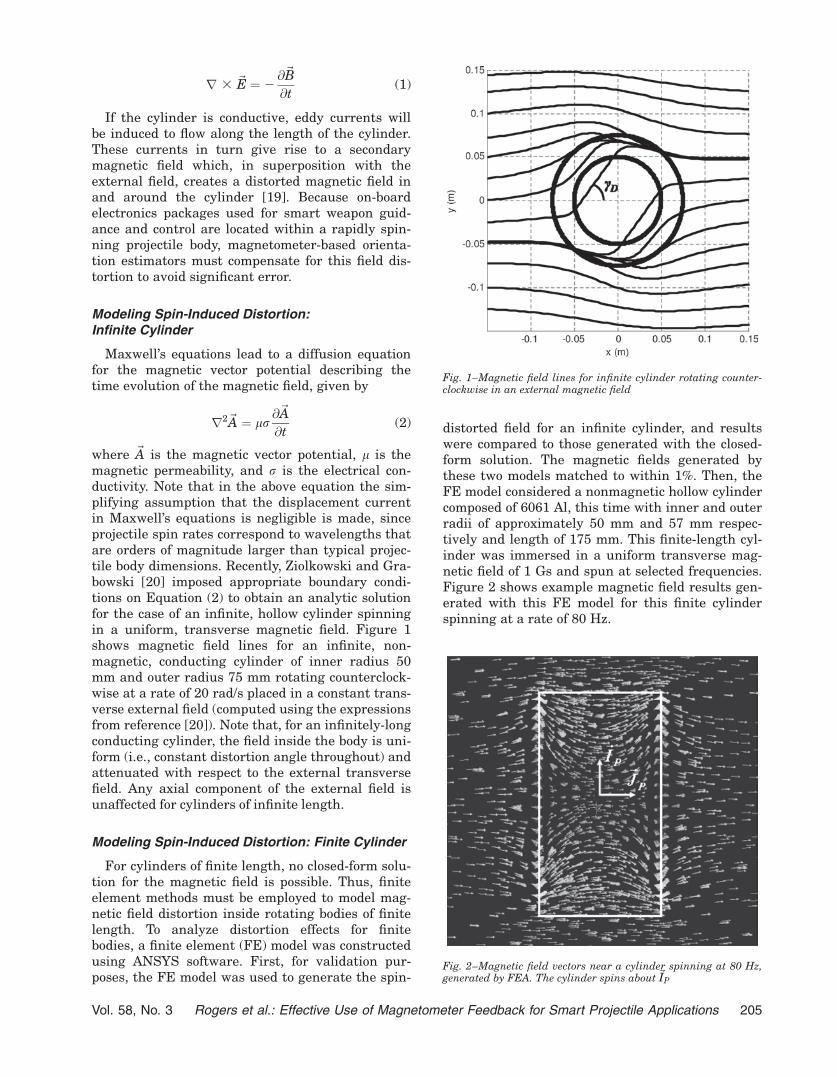
distorted field for an infinite cylinder, and resultswere compared to those generated with the closed-form solution. The magnetic fields generated bythese two models matched to within 1%. Then, theFE model considered a nonmagnetic hollow cylindercomposed of 6061 Al, this time with inner and outerradii of approximately 50 mm and 57 mm respec-tively and length of 175 mm. This finite-length cyl-inder was immersed in a uniform transverse mag-netic field of 1 Gs and spun at selected frequencies.Figure 2 shows example magnetic field results gen-erated with this FE model for this finite cylinderspinning at a rate of 80 Hz.
Fig. 1–Magnetic field lines for infinite cylinder rotating counter-clockwise in an external magnetic field
Fig. 2–Magnetic field vectors near a cylinder spinning at 80 Hz,generated by FEA. The cylinder spins about~IP
Vol. 58, No. 3 Rogers et al.: Effective Use of Magnetometer Feedback for Smart Projectile Applications 205
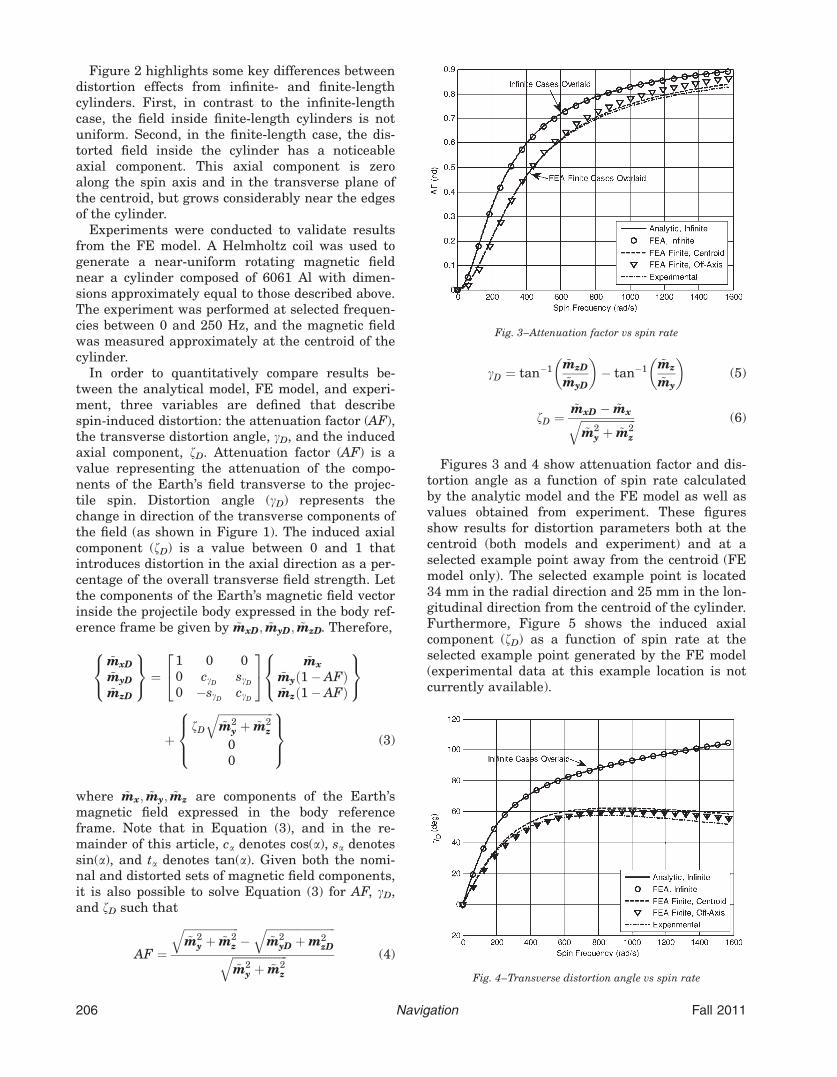
Figure 2 highlights some key differences betweendistortion effects from infinite- and finite-lengthcylinders. First, in contrast to the infinite-lengthcase, the field inside finite-length cylinders is notuniform. Second, in the finite-length case, the dis-torted field inside the cylinder has a noticeableaxial component. This axial component is zeroalong the spin axis and in the transverse plane ofthe centroid, but grows considerably near the edgesof the cylinder.
Experiments were conducted to validate resultsfrom the FE model. A Helmholtz coil was used togenerate a near-uniform rotating magnetic fieldnear a cylinder composed of 6061 Al with dimen-sions approximately equal to those described above.The experiment was performed at selected frequen-cies between 0 and 250 Hz, and the magnetic fieldwas measured approximately at the centroid of thecylinder.
In order to quantitatively compare results be-tween the analytical model, FE model, and experi-ment, three variables are defined that describespin-induced distortion: the attenuation factor (AF),the transverse distortion angle, cD, and the inducedaxial component, fD. Attenuation factor (AF) is avalue representing the attenuation of the compo-nents of the Earth’s field transverse to the projec-tile spin. Distortion angle (cD) represents thechange in direction of the transverse components ofthe field (as shown in Figure 1). The induced axialcomponent (fD) is a value between 0 and 1 thatintroduces distortion in the axial direction as a per-centage of the overall transverse field strength. Letthe components of the Earth’s magnetic field vectorinside the projectile body expressed in the body ref-erence frame be given by ~mxD; ~myD; ~mzD. Therefore,
~mxD
~myD
~mzD
8<:
9=; ¼
1 0 00 ccD
scD
0 �scDccD
24
35 ~mx
~my 1� AFð Þ~mz 1� AFð Þ
8<:
9=;
þfD
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi~m2
y þ ~m2z
q00
8><>:
9>=>; (3)
where ~mx; ~my; ~mz are components of the Earth’smagnetic field expressed in the body referenceframe. Note that in Equation (3), and in the re-mainder of this article, ca denotes cos(a), sa denotessin(a), and ta denotes tan(a). Given both the nomi-nal and distorted sets of magnetic field components,it is also possible to solve Equation (3) for AF, cD,and fD such that
AF ¼
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi~m2
y þ ~m2z
q�
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi~m2
yD þm2zD
qffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi~m2
y þ ~m2z
q (4)
cD ¼ tan�1 ~mzD
~myD
� �� tan�1 ~mz
~my
� �(5)
fD ¼~mxD � ~mxffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi
~m2y þ ~m2
z
q (6)
Figures 3 and 4 show attenuation factor and dis-tortion angle as a function of spin rate calculatedby the analytic model and the FE model as well asvalues obtained from experiment. These figuresshow results for distortion parameters both at thecentroid (both models and experiment) and at aselected example point away from the centroid (FEmodel only). The selected example point is located34 mm in the radial direction and 25 mm in the lon-gitudinal direction from the centroid of the cylinder.Furthermore, Figure 5 shows the induced axialcomponent (fD) as a function of spin rate at theselected example point generated by the FE model(experimental data at this example location is notcurrently available).
Fig. 3–Attenuation factor vs spin rate
Fig. 4–Transverse distortion angle vs spin rate
206 Navigation Fall 2011
The results shown in Figures 3–5 demonstratethat all distortion parameters vary smoothly as afunction of spin rate. Furthermore, even for projec-tiles exhibiting relatively low spin rates, theseeffects can be considerable. For spin rates between40 rad/s and 120 rad/s (the range of roll rates forthe example projectiles considered here), polyno-mial curve fits were performed to fit FEA data atthe selected example point, and were found to pro-duce reasonably accurate approximations. Notethat a cubic fit proved adequate to describe AF as afunction of roll rate while a quadratic fit provedadequate to describe both cD and fD as a function ofroll rate. Therefore,
AF � a3p3 þ a2p2 þ a1pþ a0 (7)
cD � w2p2 þw1pþw0 (8)
fD ¼ z2p2 þ z1pþ z0 (9)
The coefficients in Equations (7)–(9) can be easilydetermined for a specific projectile configurationthrough a calibration process in which the projec-
tile is rotated at various spin rates in the presenceof a known external field, and the magnetic fieldwithin the projectile carefully measured at themagnetometer location.
With valid approximations for distortion parame-ters at the location of the magnetometer sensor, itis possible to compensate for and even estimatethese distortion parameters in flight. The remain-der of this article focuses on how magnetometerscan be used effectively for real-time orientationestimation in spinning projectiles, and comparesestimation performance to algorithms that neglectspin-induced distortion.
ESTIMATOR DESIGN
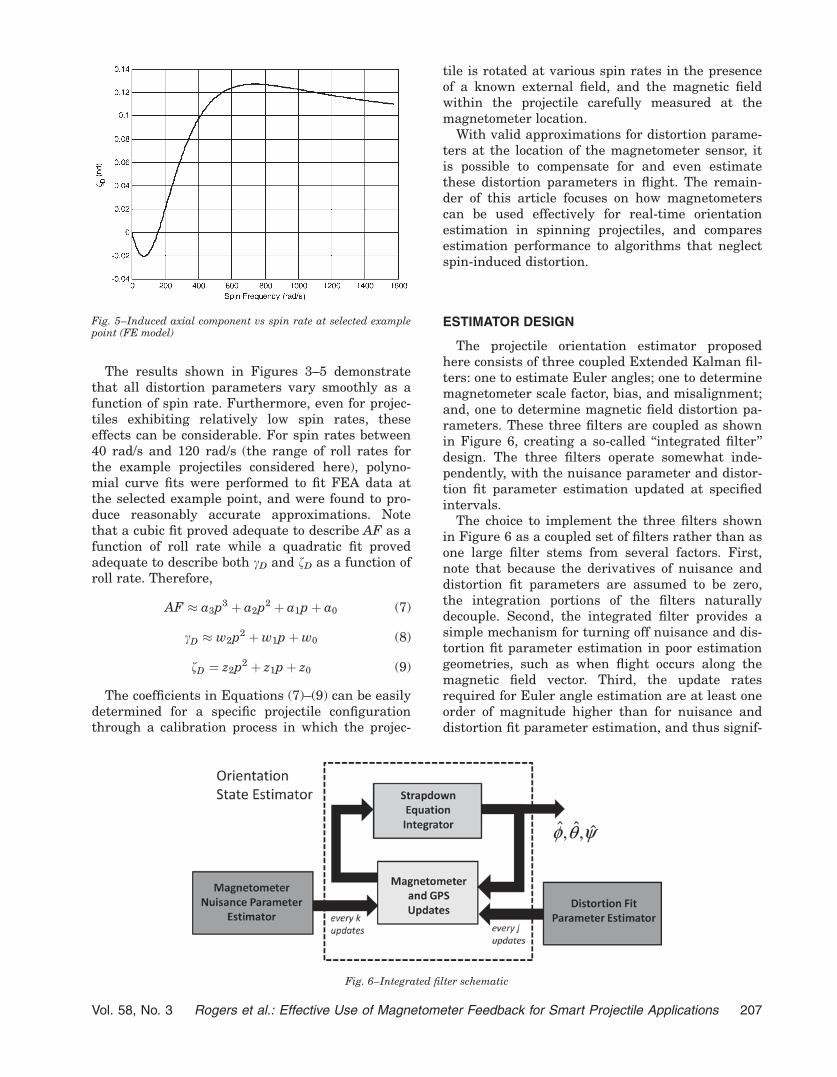
The projectile orientation estimator proposedhere consists of three coupled Extended Kalman fil-ters: one to estimate Euler angles; one to determinemagnetometer scale factor, bias, and misalignment;and, one to determine magnetic field distortion pa-rameters. These three filters are coupled as shownin Figure 6, creating a so-called ‘‘integrated filter’’design. The three filters operate somewhat inde-pendently, with the nuisance parameter and distor-tion fit parameter estimation updated at specifiedintervals.
The choice to implement the three filters shownin Figure 6 as a coupled set of filters rather than asone large filter stems from several factors. First,note that because the derivatives of nuisance anddistortion fit parameters are assumed to be zero,the integration portions of the filters naturallydecouple. Second, the integrated filter provides asimple mechanism for turning off nuisance and dis-tortion fit parameter estimation in poor estimationgeometries, such as when flight occurs along themagnetic field vector. Third, the update ratesrequired for Euler angle estimation are at least oneorder of magnitude higher than for nuisance anddistortion fit parameter estimation, and thus signif-
Fig. 5–Induced axial component vs spin rate at selected examplepoint (FE model)
Fig. 6–Integrated filter schematic
Vol. 58, No. 3 Rogers et al.: Effective Use of Magnetometer Feedback for Smart Projectile Applications 207
icant computation time can be saved by avoidinghigh-frequency updates to these parameters.
This section describes the design of each of thethree coupled Extended Kalman filters (EKFs). Kal-man filters generally use a process model to propa-gate state estimates and a measurement model toupdate state estimates whenever measurementsare available. Note that the sensor suite consideredhere consists of a three-axis magnetometer, a three-axis rate gyroscope, and GPS-derived inertial veloc-ity feedback. Signals from the rate gyroscope areused directly to drive Euler angle dynamics, andthus scale factor errors, biases, and misalignmentsof the gyroscopes are not estimated.
The first section describes sensor and projectilegeometry, while subsequent sections discuss thedistortion fit, magnetometer nuisance parameter,and orientation state estimators, respectively. Inthe final section, an observability analysis of theentire problem is performed and unobservablestates are removed.
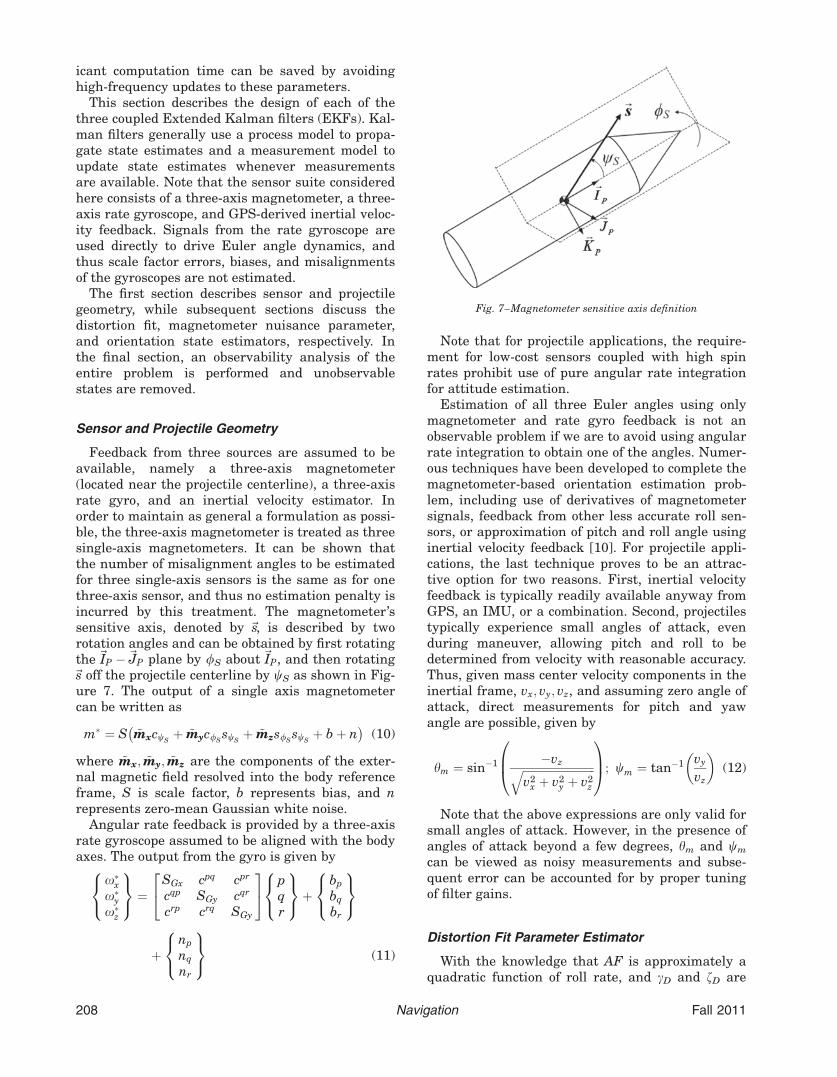
Sensor and Projectile Geometry
Feedback from three sources are assumed to beavailable, namely a three-axis magnetometer(located near the projectile centerline), a three-axisrate gyro, and an inertial velocity estimator. Inorder to maintain as general a formulation as possi-ble, the three-axis magnetometer is treated as threesingle-axis magnetometers. It can be shown thatthe number of misalignment angles to be estimatedfor three single-axis sensors is the same as for onethree-axis sensor, and thus no estimation penalty isincurred by this treatment. The magnetometer’ssensitive axis, denoted by ~s, is described by tworotation angles and can be obtained by first rotatingthe~IP �~JP plane by /S about~IP, and then rotating~s off the projectile centerline by wS as shown in Fig-ure 7. The output of a single axis magnetometercan be written as
m� ¼ S ~mxcwSþ ~myc/S
swSþ ~mzs/S
swSþ bþ n
� �(10)
where ~mx; ~my; ~mz are the components of the exter-nal magnetic field resolved into the body referenceframe, S is scale factor, b represents bias, and nrepresents zero-mean Gaussian white noise.
Angular rate feedback is provided by a three-axisrate gyroscope assumed to be aligned with the bodyaxes. The output from the gyro is given by
x�xx�yx�z
8<:
9=; ¼
SGx cpq cpr
cqp SGy cqr
crp crq SGy
24
35 p
qr
8<:
9=;þ
bp
bq
br
8<:
9=;
þnp
nq
nr
8<:
9=; (11)
Note that for projectile applications, the require-ment for low-cost sensors coupled with high spinrates prohibit use of pure angular rate integrationfor attitude estimation.
Estimation of all three Euler angles using onlymagnetometer and rate gyro feedback is not anobservable problem if we are to avoid using angularrate integration to obtain one of the angles. Numer-ous techniques have been developed to complete themagnetometer-based orientation estimation prob-lem, including use of derivatives of magnetometersignals, feedback from other less accurate roll sen-sors, or approximation of pitch and roll angle usinginertial velocity feedback [10]. For projectile appli-cations, the last technique proves to be an attrac-tive option for two reasons. First, inertial velocityfeedback is typically readily available anyway fromGPS, an IMU, or a combination. Second, projectilestypically experience small angles of attack, evenduring maneuver, allowing pitch and roll to bedetermined from velocity with reasonable accuracy.Thus, given mass center velocity components in theinertial frame, vx; vy; vz, and assuming zero angle ofattack, direct measurements for pitch and yawangle are possible, given by
hm ¼ sin�1 �vzffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiv2
x þ v2y þ v2
z
q0B@
1CA; wm ¼ tan�1 vy
vz
� �(12)
Note that the above expressions are only valid forsmall angles of attack. However, in the presence ofangles of attack beyond a few degrees, hm and wm
can be viewed as noisy measurements and subse-quent error can be accounted for by proper tuningof filter gains.
Distortion Fit Parameter Estimator
With the knowledge that AF is approximately aquadratic function of roll rate, and cD and fD are
Fig. 7–Magnetometer sensitive axis definition
208 Navigation Fall 2011

approximately cubic functions of roll rate, anExtended Kalman filter (EKF) is designed to esti-mate polynomial fit parameters in real time. First,note that the magnetometer equation now changesfrom the expression shown in Equation (10) to
m� ¼ S ~mxcwSþ fDcwS
ffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffiffi~m2
y þ ~m2z
qþ bþ n
� �
þ S 1� AFð ÞccDc/S
swS~my þ s/S
swS~mz
� �þ S 1� AFð ÞscD
s/SswS
~my � c/SswS
~mz
� � (13)
Equation (13) serves as the measurement modelfor this filter and those described in subsequent sec-tions. The state vector estimated by this filter isgiven by
~xD ¼
a0
a1
a2
a3
w0
w1
w2
z0
z1
z2
8>>>>>>>>>>>>>><>>>>>>>>>>>>>>:
9>>>>>>>>>>>>>>=>>>>>>>>>>>>>>;
(14)
It is assumed that all fit parameters do not varywith time, and thus the state and covariance propa-gation equations are given by
_~xD ¼ 0 (15)
_PD ¼ QD (16)
where PD is the state covariance matrix and QD isa gain matrix corresponding to the estimated pro-cess model error covariance. The measurementsused by the filter are the three magnetometer out-puts corresponding to Equation (13), and thus thestate update is given by
a0new
a1new
a2new
a3new
w0new
w1new
w2new
z0new
z1new
z2new
8>>>>>>>>>>>>>><>>>>>>>>>>>>>>:
9>>>>>>>>>>>>>>=>>>>>>>>>>>>>>;
¼
a0
a1
a2
a3
w0
w1
w2
z0
z1
z2
8>>>>>>>>>>>>>><>>>>>>>>>>>>>>:
9>>>>>>>>>>>>>>=>>>>>>>>>>>>>>;
þKD ~m� � ~mpred� �
(17)
where ~m� and ~mpred are the actual and predictedmagnetometer outputs respectively, and KD is theKalman gain matrix given by
KD ¼ PD I �CTD RD þCDPDCT
D
� ��1CDPD
� �CT
DR�1D
(18)
Note that in Equation (18), CD is the linearizedoutput matrix given by
CD ¼ @~m�
@a0
@~m�
@a1
@~m�
@a2
@~m�
@a3
@~m�
@w0
@~m�
@w1
@~m�
@w2
@~m�
@z0
@~m�
@z1
@~m�
@z2
h i(19)
and RD is a user-specified gain matrix correspond-ing to the estimated measurement covariance.Finally, state covariance updates are computedaccording to
PDNew ¼ P�1D þCT
DR�1D CD
� ��1(20)
Magnetometer Nuisance Parameter Estimator
A separate Extended Kalman filter is used toestimate nuisance parameters for each single-axismagnetometer. The state vector estimated by thisfilter is given by
~xM ¼
Sb/S
wS
8>><>>:
9>>=>>; (21)
It is assumed that all nuisance parameters areconstant, and thus the state and covariance propa-gation equations are given by
_~xM ¼ 0 (22)
_PM ¼ QM (23)
where PM is the state covariance matrix and QM isa gain matrix corresponding to the estimated pro-cess model error covariance. The sole measurementused by this filter is the magnetometer output m*,and thus the state update is given by
Snew
bnew
/Snew
wSnew
8>><>>:
9>>=>>; ¼
Sb/S
wS
8>><>>:
9>>=>>;þKM m� �mpred
� �(24)
In Equation (24), KM is the Kalman gain matrixgiven by
KM ¼PM I�CTM RMþCMPMCT
M
� ��1CMPM
� �CT
MR�1M
(25)
Vol. 58, No. 3 Rogers et al.: Effective Use of Magnetometer Feedback for Smart Projectile Applications 209

where
CM ¼@m�
@S
@m�
@b
@m�
@/S
@m�
@wS
(26)
and RM is a user-specified gain matrix correspond-ing to the estimated measurement covariance.Finally, state covariance updates are computedaccording to
PMNew ¼ P�1M þCT
MR�1M CM
� ��1(27)
Note that three separate instances of this filter(one for each single-axis sensor) actually comprisethe nuisance parameter estimator.
Orientation State Estimator
The orientation estimator uses an EKF frame-work to combine feedback signals from rate gyros,magnetometers, and the velocity estimator. Theprocess model used by this filter is given by thenonlinear strapdown equations,
_/_h_w
264375 ¼
1 s/th c/th0 c/ �s/
0 s/=ch c/=ch
24
35 x�x
x�yx�z
8<:
9=; ¼ D½ �
x�xx�yx�z
8<:
9=;(28)
Note that in the above equations, /; h; w are theestimated Euler angles and x�x;x
�y;x
�z are gyro
measurements. As mentioned before, signals fromthe rate gyroscope are used directly to drive Eulerangle dynamics and thus are not used for measure-ment updates. The Jacobian of [D], omitted here forbrevity, is used to propagate the state covariancematrix PE according to
_PE ¼ AEPE þ PEATE þQE (29)
where AE is the Jacobian of [D] and QE a user-specified gain matrix. The measurement vector,given by
ME ¼
m�1m�2m�3hm
wm
8>>>><>>>>:
9>>>>=>>>>;
(30)
is used to update the estimated state vector at arate of 100 Hz. State and covariance updates areperformed by first computing the Kalman gain ma-trix KE according to
KE ¼ PE I �CTE RE þCEPECT
E
� ��1CEPE
� �CT
ER�1E
(31)
where CE is the linearized output matrix of the sys-tem computed from Equations (11) and (12) and RE
is a user-specified gain matrix. Then, the state vec-tor is updated according to
/�new
h�new
w�new
8<:
9=; ¼
/�
h�
w�
8<:
9=;þKE
m�1 �mpred1
m�2 �mpred2
m�3 �mpred3
hm � h�
wm � w�
8>>>>><>>>>>:
9>>>>>=>>>>>;
(32)
where the superscript (pred) indicates predictedmeasurements. The state covariance matrix isupdated according to
PENew ¼ P�1E þCT
ER�1E CE
� ��1(33)
Observability Analysis
The distinguishability of each parameter in theestimation problem can be analyzed by consideringa state vector consisting of /, h, w, S, b, /S, wS, AF,cD, and fD. Three of these states can be identifiedimmediately as indistinguishable due to the identi-cal way in which they affect sensor outputs: /, /S,and cD. As the projectile rolls, the magnetometersensor cannot distinguish between a change in rollangle, a change in magnetometer roll angle align-ment, and a change in magnetic field distortionangle. This is because the magnetic field is the soletruth source of the estimator, and other sources ofroll angle feedback would be required to distinguishbetween these factors. Therefore, since a primarygoal of the system is to provide an estimate of rollangle, /S and cD are eliminated from the estimationproblem and magnetometer roll alignment anglesand the model for distortion angle must be heldconstant throughout flight.
The distinguishable nature of each variable inthe estimation problem can be verified mathemati-cally by examining the magnetometer measure-ment equation shown in Equation (13). Considerthe observability map of the nonlinear system [21]which can be used to determine distinguishabilityof one parameter with respect to another. Forinstance, to compute whether / is distinguishablewith respect to /S, the observability map would becomputed according to
H ¼
@m�
@/@m�
@/S@ _m�
@/@ _m�
@/S
2664
3775 (34)
If H is always singular, then / is indistinguish-able from /S everywhere in the state space. Bycomputing H for each pair, indistinguishable combi-nations of the state vector can be identified.
210 Navigation Fall 2011
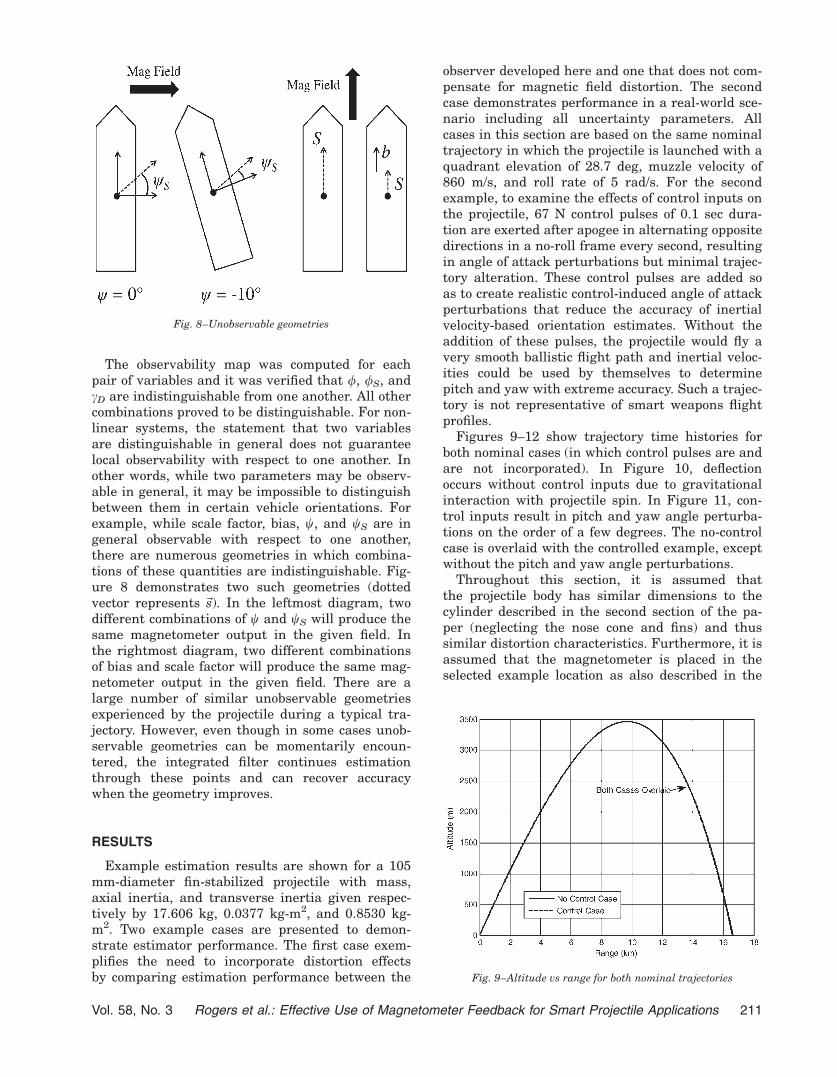
The observability map was computed for eachpair of variables and it was verified that /, /S, andcD are indistinguishable from one another. All othercombinations proved to be distinguishable. For non-linear systems, the statement that two variablesare distinguishable in general does not guaranteelocal observability with respect to one another. Inother words, while two parameters may be observ-able in general, it may be impossible to distinguishbetween them in certain vehicle orientations. Forexample, while scale factor, bias, w, and wS are ingeneral observable with respect to one another,there are numerous geometries in which combina-tions of these quantities are indistinguishable. Fig-ure 8 demonstrates two such geometries (dottedvector represents ~s). In the leftmost diagram, twodifferent combinations of w and wS will produce thesame magnetometer output in the given field. Inthe rightmost diagram, two different combinationsof bias and scale factor will produce the same mag-netometer output in the given field. There are alarge number of similar unobservable geometriesexperienced by the projectile during a typical tra-jectory. However, even though in some cases unob-servable geometries can be momentarily encoun-tered, the integrated filter continues estimationthrough these points and can recover accuracywhen the geometry improves.
RESULTS
Example estimation results are shown for a 105mm-diameter fin-stabilized projectile with mass,axial inertia, and transverse inertia given respec-tively by 17.606 kg, 0.0377 kg-m2, and 0.8530 kg-m2. Two example cases are presented to demon-strate estimator performance. The first case exem-plifies the need to incorporate distortion effectsby comparing estimation performance between the
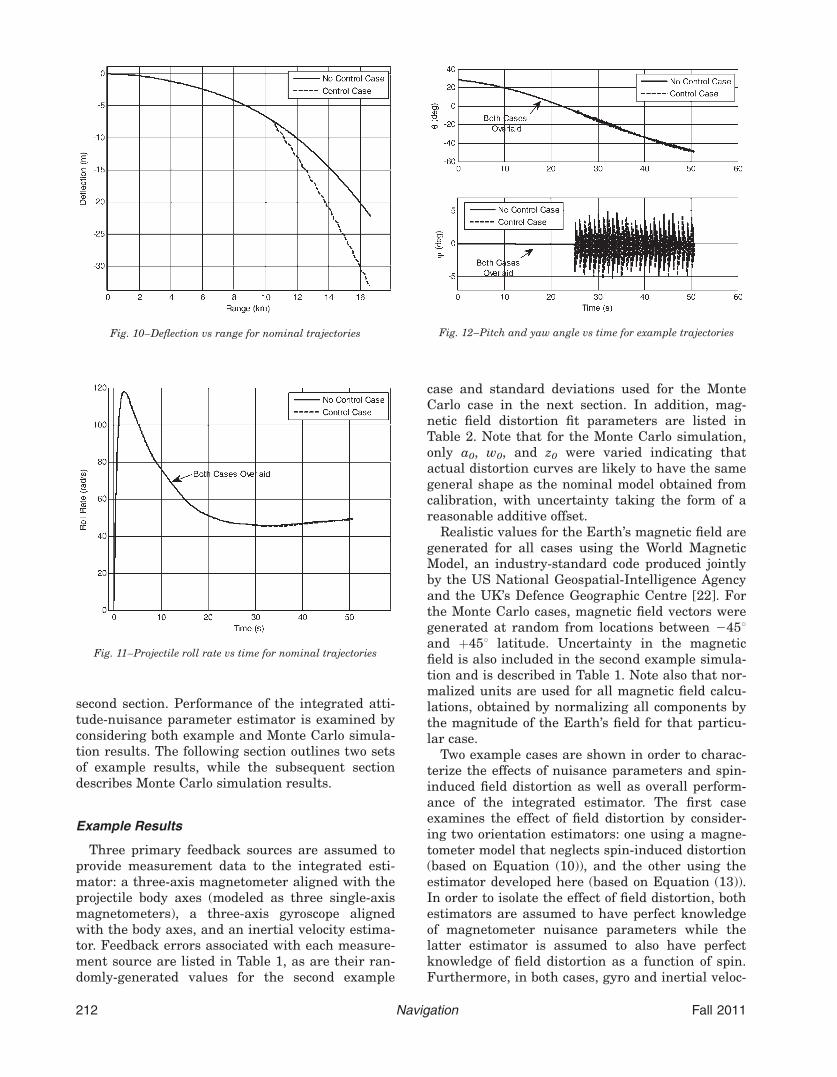
observer developed here and one that does not com-pensate for magnetic field distortion. The secondcase demonstrates performance in a real-world sce-nario including all uncertainty parameters. Allcases in this section are based on the same nominaltrajectory in which the projectile is launched with aquadrant elevation of 28.7 deg, muzzle velocity of860 m/s, and roll rate of 5 rad/s. For the secondexample, to examine the effects of control inputs onthe projectile, 67 N control pulses of 0.1 sec dura-tion are exerted after apogee in alternating oppositedirections in a no-roll frame every second, resultingin angle of attack perturbations but minimal trajec-tory alteration. These control pulses are added soas to create realistic control-induced angle of attackperturbations that reduce the accuracy of inertialvelocity-based orientation estimates. Without theaddition of these pulses, the projectile would fly avery smooth ballistic flight path and inertial veloc-ities could be used by themselves to determinepitch and yaw with extreme accuracy. Such a trajec-tory is not representative of smart weapons flightprofiles.
Figures 9–12 show trajectory time histories forboth nominal cases (in which control pulses are andare not incorporated). In Figure 10, deflectionoccurs without control inputs due to gravitationalinteraction with projectile spin. In Figure 11, con-trol inputs result in pitch and yaw angle perturba-tions on the order of a few degrees. The no-controlcase is overlaid with the controlled example, exceptwithout the pitch and yaw angle perturbations.
Throughout this section, it is assumed thatthe projectile body has similar dimensions to thecylinder described in the second section of the pa-per (neglecting the nose cone and fins) and thussimilar distortion characteristics. Furthermore, it isassumed that the magnetometer is placed in theselected example location as also described in the
Fig. 8–Unobservable geometries
Fig. 9–Altitude vs range for both nominal trajectories
Vol. 58, No. 3 Rogers et al.: Effective Use of Magnetometer Feedback for Smart Projectile Applications 211
second section. Performance of the integrated atti-tude-nuisance parameter estimator is examined byconsidering both example and Monte Carlo simula-tion results. The following section outlines two setsof example results, while the subsequent sectiondescribes Monte Carlo simulation results.
Example Results
Three primary feedback sources are assumed toprovide measurement data to the integrated esti-mator: a three-axis magnetometer aligned with theprojectile body axes (modeled as three single-axismagnetometers), a three-axis gyroscope alignedwith the body axes, and an inertial velocity estima-tor. Feedback errors associated with each measure-ment source are listed in Table 1, as are their ran-domly-generated values for the second example
case and standard deviations used for the MonteCarlo case in the next section. In addition, mag-netic field distortion fit parameters are listed inTable 2. Note that for the Monte Carlo simulation,only a0, w0, and z0 were varied indicating thatactual distortion curves are likely to have the samegeneral shape as the nominal model obtained fromcalibration, with uncertainty taking the form of areasonable additive offset.
Realistic values for the Earth’s magnetic field aregenerated for all cases using the World MagneticModel, an industry-standard code produced jointlyby the US National Geospatial-Intelligence Agencyand the UK’s Defence Geographic Centre [22]. Forthe Monte Carlo cases, magnetic field vectors weregenerated at random from locations between 2458and þ458 latitude. Uncertainty in the magneticfield is also included in the second example simula-tion and is described in Table 1. Note also that nor-malized units are used for all magnetic field calcu-lations, obtained by normalizing all components bythe magnitude of the Earth’s field for that particu-lar case.
Two example cases are shown in order to charac-terize the effects of nuisance parameters and spin-induced field distortion as well as overall perform-ance of the integrated estimator. The first caseexamines the effect of field distortion by consider-ing two orientation estimators: one using a magne-tometer model that neglects spin-induced distortion(based on Equation (10)), and the other using theestimator developed here (based on Equation (13)).In order to isolate the effect of field distortion, bothestimators are assumed to have perfect knowledgeof magnetometer nuisance parameters while thelatter estimator is assumed to also have perfectknowledge of field distortion as a function of spin.Furthermore, in both cases, gyro and inertial veloc-
Fig. 10–Deflection vs range for nominal trajectories
Fig. 11–Projectile roll rate vs time for nominal trajectories
Fig. 12–Pitch and yaw angle vs time for example trajectories
212 Navigation Fall 2011
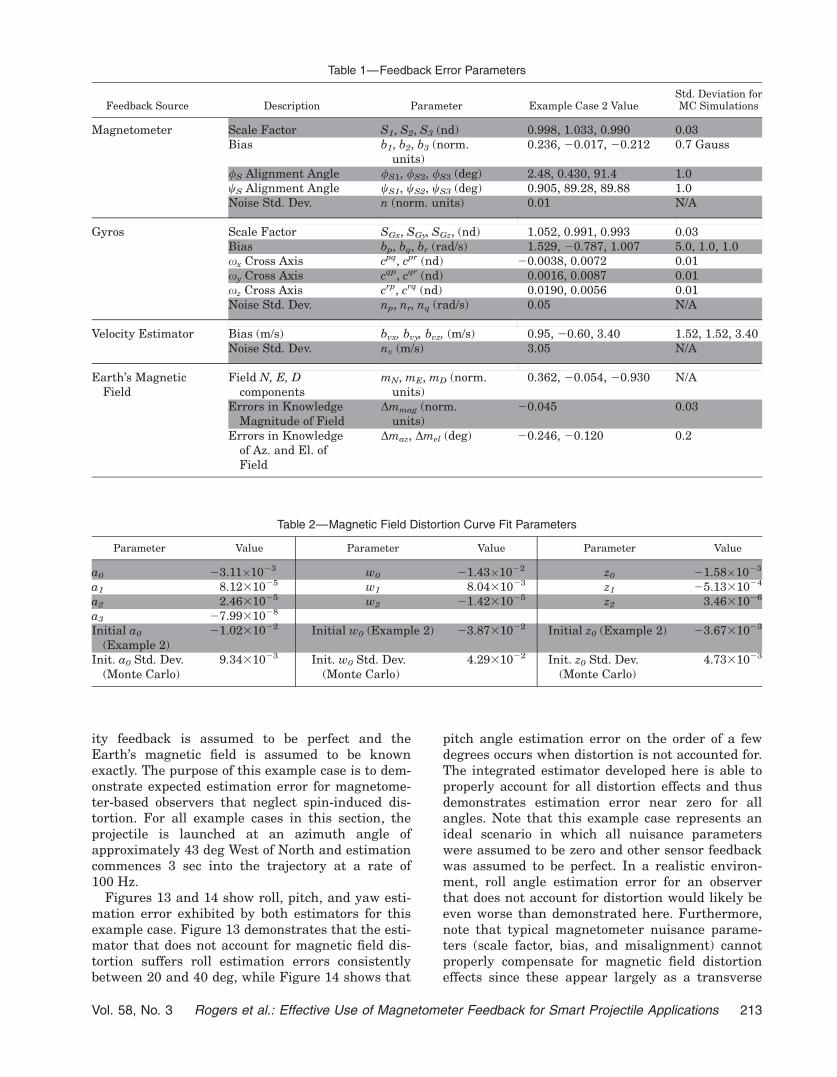
ity feedback is assumed to be perfect and theEarth’s magnetic field is assumed to be knownexactly. The purpose of this example case is to dem-onstrate expected estimation error for magnetome-ter-based observers that neglect spin-induced dis-tortion. For all example cases in this section, theprojectile is launched at an azimuth angle ofapproximately 43 deg West of North and estimationcommences 3 sec into the trajectory at a rate of100 Hz.
Figures 13 and 14 show roll, pitch, and yaw esti-mation error exhibited by both estimators for thisexample case. Figure 13 demonstrates that the esti-mator that does not account for magnetic field dis-tortion suffers roll estimation errors consistentlybetween 20 and 40 deg, while Figure 14 shows that
pitch angle estimation error on the order of a fewdegrees occurs when distortion is not accounted for.The integrated estimator developed here is able toproperly account for all distortion effects and thusdemonstrates estimation error near zero for allangles. Note that this example case represents anideal scenario in which all nuisance parameterswere assumed to be zero and other sensor feedbackwas assumed to be perfect. In a realistic environ-ment, roll angle estimation error for an observerthat does not account for distortion would likely beeven worse than demonstrated here. Furthermore,note that typical magnetometer nuisance parame-ters (scale factor, bias, and misalignment) cannotproperly compensate for magnetic field distortioneffects since these appear largely as a transverse
Table 1—Feedback Error Parameters
Feedback Source Description Parameter Example Case 2 ValueStd. Deviation forMC Simulations
Magnetometer Scale Factor S1, S2, S3 (nd) 0.998, 1.033, 0.990 0.03Bias b1, b2, b3 (norm.
units)0.236, 20.017, 20.212 0.7 Gauss
/S Alignment Angle /S1, /S2, /S3 (deg) 2.48, 0.430, 91.4 1.0wS Alignment Angle wS1, wS2, wS3 (deg) 0.905, 89.28, 89.88 1.0Noise Std. Dev. n (norm. units) 0.01 N/A
Gyros Scale Factor SGx, SGy, SGz, (nd) 1.052, 0.991, 0.993 0.03Bias bp, bq, br (rad/s) 1.529, 20.787, 1.007 5.0, 1.0, 1.0xx Cross Axis cpq, cpr (nd) 20.0038, 0.0072 0.01xy Cross Axis cqp, cqr (nd) 0.0016, 0.0087 0.01xz Cross Axis crp, crq (nd) 0.0190, 0.0056 0.01Noise Std. Dev. np, nr, nq (rad/s) 0.05 N/A
Velocity Estimator Bias (m/s) bvx, bvy, bvz, (m/s) 0.95, 20.60, 3.40 1.52, 1.52, 3.40Noise Std. Dev. nv (m/s) 3.05 N/A
Earth’s MagneticField
Field N, E, Dcomponents
mN, mE, mD (norm.units)
0.362, 20.054, 20.930 N/A
Errors in KnowledgeMagnitude of Field
Dmmag (norm.units)
20.045 0.03
Errors in Knowledgeof Az. and El. ofField
Dmaz, Dmel (deg) 20.246, 20.120 0.2
Table 2—Magnetic Field Distortion Curve Fit Parameters
Parameter Value Parameter Value Parameter Value
a0 23.11�1023 w0 21.43�1022 z0 21.58�1023
a1 8.1231025 w1 8.0431023 z1 25.1331024
a2 2.4631025 w2 21.4231025 z2 3.4631026
a3 27.9931028
Initial a0
(Example 2)21.0231022 Initial w0 (Example 2) 23.8731022 Initial z0 (Example 2) 23.6731023
Init. a0 Std. Dev.(Monte Carlo)
9.3431023 Init. w0 Std. Dev.(Monte Carlo)
4.2931022 Init. z0 Std. Dev.(Monte Carlo)
4.7331023
Vol. 58, No. 3 Rogers et al.: Effective Use of Magnetometer Feedback for Smart Projectile Applications 213
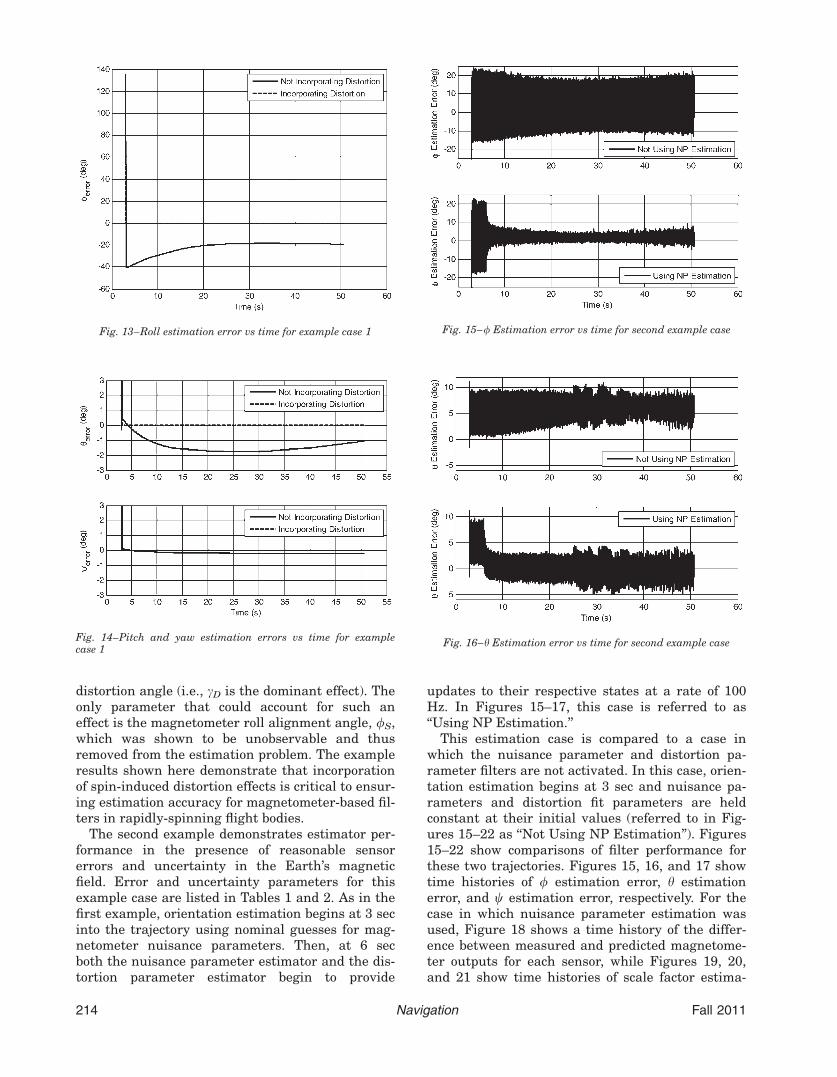
distortion angle (i.e., cD is the dominant effect). Theonly parameter that could account for such aneffect is the magnetometer roll alignment angle, /S,which was shown to be unobservable and thusremoved from the estimation problem. The exampleresults shown here demonstrate that incorporationof spin-induced distortion effects is critical to ensur-ing estimation accuracy for magnetometer-based fil-ters in rapidly-spinning flight bodies.
The second example demonstrates estimator per-formance in the presence of reasonable sensorerrors and uncertainty in the Earth’s magneticfield. Error and uncertainty parameters for thisexample case are listed in Tables 1 and 2. As in thefirst example, orientation estimation begins at 3 secinto the trajectory using nominal guesses for mag-netometer nuisance parameters. Then, at 6 secboth the nuisance parameter estimator and the dis-tortion parameter estimator begin to provide
updates to their respective states at a rate of 100Hz. In Figures 15–17, this case is referred to as‘‘Using NP Estimation.’’
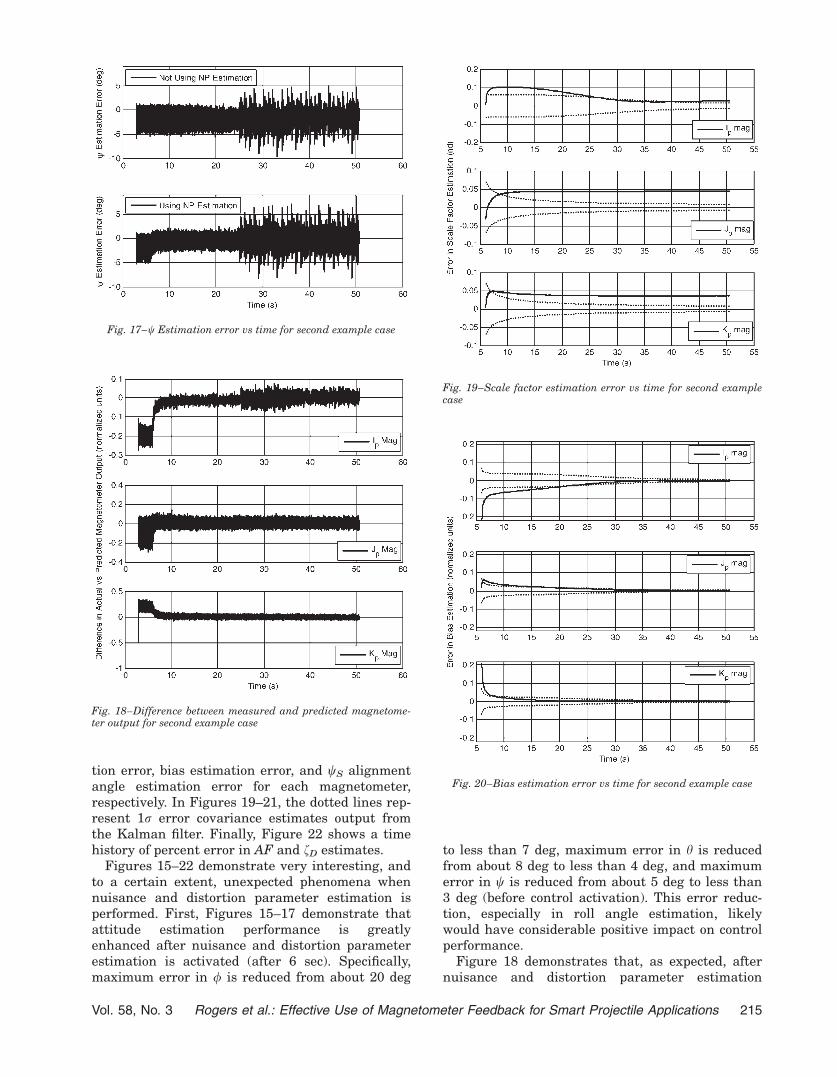
This estimation case is compared to a case inwhich the nuisance parameter and distortion pa-rameter filters are not activated. In this case, orien-tation estimation begins at 3 sec and nuisance pa-rameters and distortion fit parameters are heldconstant at their initial values (referred to in Fig-ures 15–22 as ‘‘Not Using NP Estimation’’). Figures15–22 show comparisons of filter performance forthese two trajectories. Figures 15, 16, and 17 showtime histories of / estimation error, h estimationerror, and w estimation error, respectively. For thecase in which nuisance parameter estimation wasused, Figure 18 shows a time history of the differ-ence between measured and predicted magnetome-ter outputs for each sensor, while Figures 19, 20,and 21 show time histories of scale factor estima-
Fig. 13–Roll estimation error vs time for example case 1
Fig. 16–h Estimation error vs time for second example caseFig. 14–Pitch and yaw estimation errors vs time for examplecase 1
Fig. 15–/ Estimation error vs time for second example case
214 Navigation Fall 2011
tion error, bias estimation error, and wS alignmentangle estimation error for each magnetometer,respectively. In Figures 19–21, the dotted lines rep-resent 1r error covariance estimates output fromthe Kalman filter. Finally, Figure 22 shows a timehistory of percent error in AF and fD estimates.
Figures 15–22 demonstrate very interesting, andto a certain extent, unexpected phenomena whennuisance and distortion parameter estimation isperformed. First, Figures 15–17 demonstrate thatattitude estimation performance is greatlyenhanced after nuisance and distortion parameterestimation is activated (after 6 sec). Specifically,maximum error in / is reduced from about 20 deg
to less than 7 deg, maximum error in h is reducedfrom about 8 deg to less than 4 deg, and maximumerror in w is reduced from about 5 deg to less than3 deg (before control activation). This error reduc-tion, especially in roll angle estimation, likelywould have considerable positive impact on controlperformance.
Figure 18 demonstrates that, as expected, afternuisance and distortion parameter estimation
Fig. 17–w Estimation error vs time for second example case
Fig. 18–Difference between measured and predicted magnetome-ter output for second example case
Fig. 19–Scale factor estimation error vs time for second examplecase
Fig. 20–Bias estimation error vs time for second example case
Vol. 58, No. 3 Rogers et al.: Effective Use of Magnetometer Feedback for Smart Projectile Applications 215
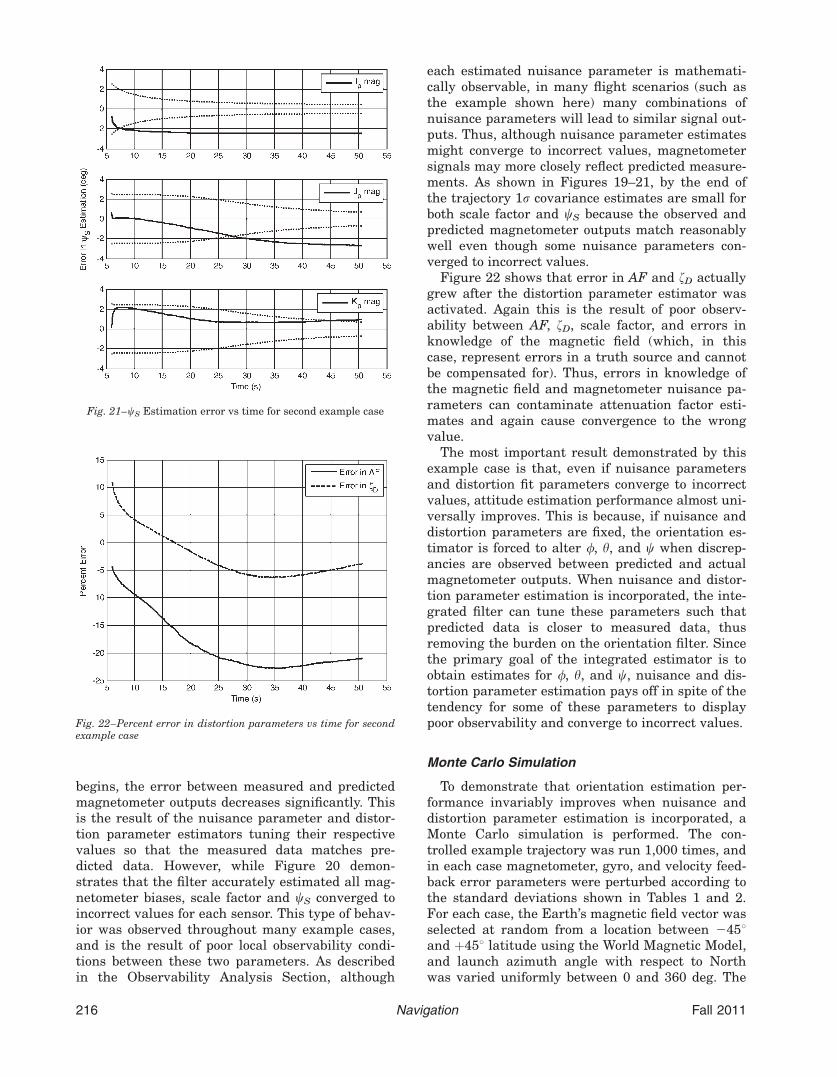
begins, the error between measured and predictedmagnetometer outputs decreases significantly. Thisis the result of the nuisance parameter and distor-tion parameter estimators tuning their respectivevalues so that the measured data matches pre-dicted data. However, while Figure 20 demon-strates that the filter accurately estimated all mag-netometer biases, scale factor and wS converged toincorrect values for each sensor. This type of behav-ior was observed throughout many example cases,and is the result of poor local observability condi-tions between these two parameters. As describedin the Observability Analysis Section, although
each estimated nuisance parameter is mathemati-cally observable, in many flight scenarios (such asthe example shown here) many combinations ofnuisance parameters will lead to similar signal out-puts. Thus, although nuisance parameter estimatesmight converge to incorrect values, magnetometersignals may more closely reflect predicted measure-ments. As shown in Figures 19–21, by the end ofthe trajectory 1r covariance estimates are small forboth scale factor and wS because the observed andpredicted magnetometer outputs match reasonablywell even though some nuisance parameters con-verged to incorrect values.
Figure 22 shows that error in AF and fD actuallygrew after the distortion parameter estimator wasactivated. Again this is the result of poor observ-ability between AF, fD, scale factor, and errors inknowledge of the magnetic field (which, in thiscase, represent errors in a truth source and cannotbe compensated for). Thus, errors in knowledge ofthe magnetic field and magnetometer nuisance pa-rameters can contaminate attenuation factor esti-mates and again cause convergence to the wrongvalue.
The most important result demonstrated by thisexample case is that, even if nuisance parametersand distortion fit parameters converge to incorrectvalues, attitude estimation performance almost uni-versally improves. This is because, if nuisance anddistortion parameters are fixed, the orientation es-timator is forced to alter /, h, and w when discrep-ancies are observed between predicted and actualmagnetometer outputs. When nuisance and distor-tion parameter estimation is incorporated, the inte-grated filter can tune these parameters such thatpredicted data is closer to measured data, thusremoving the burden on the orientation filter. Sincethe primary goal of the integrated estimator is toobtain estimates for /, h, and w, nuisance and dis-tortion parameter estimation pays off in spite of thetendency for some of these parameters to displaypoor observability and converge to incorrect values.
Monte Carlo Simulation
To demonstrate that orientation estimation per-formance invariably improves when nuisance anddistortion parameter estimation is incorporated, aMonte Carlo simulation is performed. The con-trolled example trajectory was run 1,000 times, andin each case magnetometer, gyro, and velocity feed-back error parameters were perturbed according tothe standard deviations shown in Tables 1 and 2.For each case, the Earth’s magnetic field vector wasselected at random from a location between 2458and þ458 latitude using the World Magnetic Model,and launch azimuth angle with respect to Northwas varied uniformly between 0 and 360 deg. The
Fig. 22–Percent error in distortion parameters vs time for secondexample case
Fig. 21–wS Estimation error vs time for second example case
216 Navigation Fall 2011
initial guess for pitch angle was 0.46 rad in eachcase, while the initial guess for roll angle was var-ied uniformly between 0 and 2p rad. Two caseswere run for each set of initial conditions: one casein which nuisance and distortion parameter estima-tion was performed, and one case in which nuisanceand distortion parameter estimation was not. Foreach trajectory, RMS errors were calculated for /,h, and w estimation.
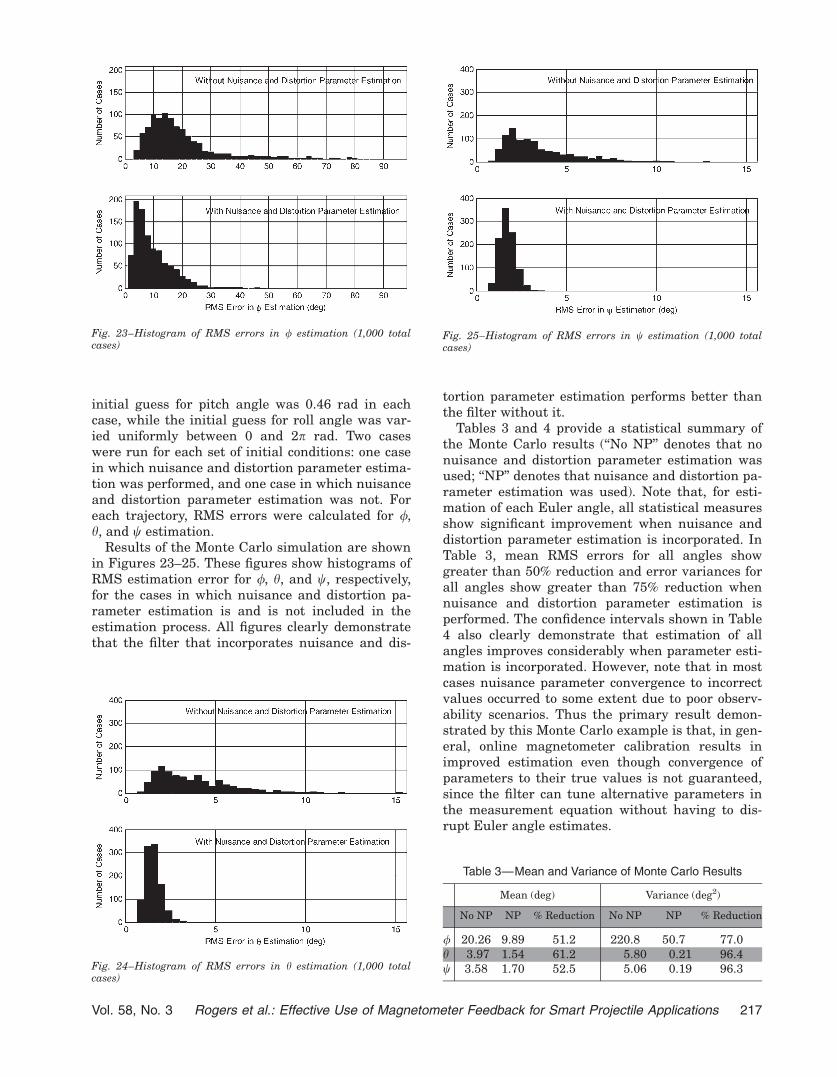
Results of the Monte Carlo simulation are shownin Figures 23–25. These figures show histograms ofRMS estimation error for /, h, and w, respectively,for the cases in which nuisance and distortion pa-rameter estimation is and is not included in theestimation process. All figures clearly demonstratethat the filter that incorporates nuisance and dis-
tortion parameter estimation performs better thanthe filter without it.
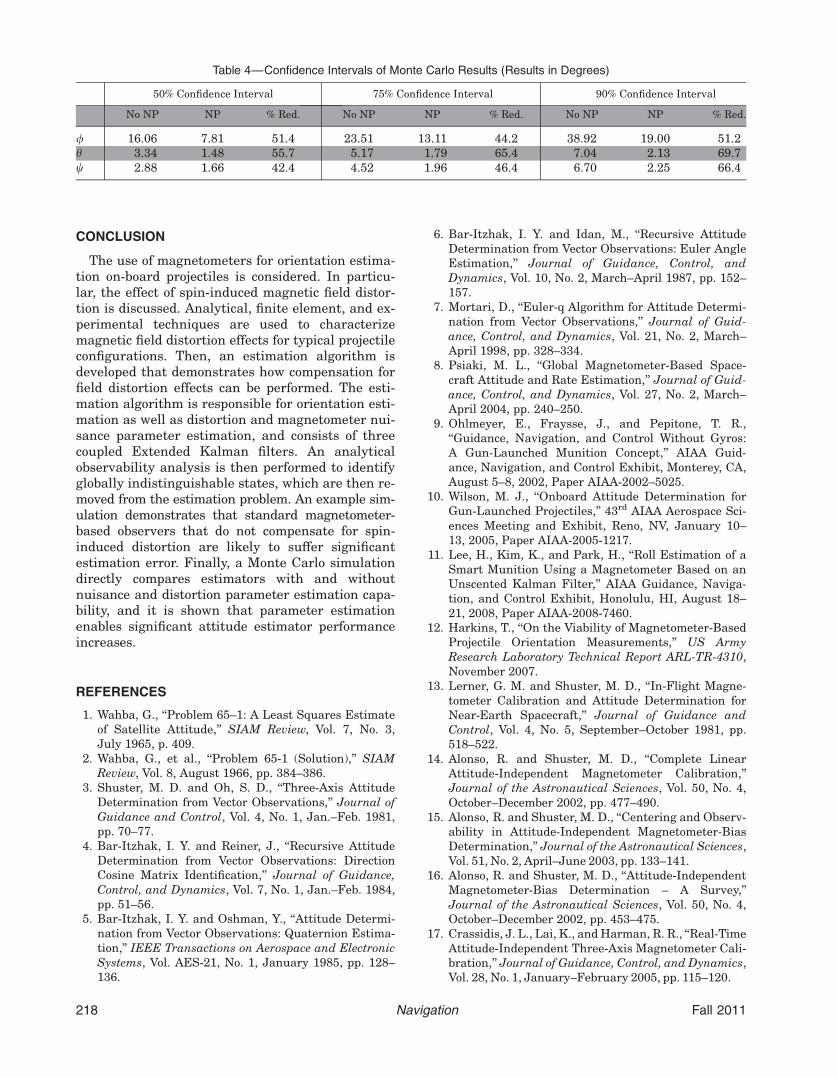
Tables 3 and 4 provide a statistical summary ofthe Monte Carlo results (‘‘No NP’’ denotes that nonuisance and distortion parameter estimation wasused; ‘‘NP’’ denotes that nuisance and distortion pa-rameter estimation was used). Note that, for esti-mation of each Euler angle, all statistical measuresshow significant improvement when nuisance anddistortion parameter estimation is incorporated. InTable 3, mean RMS errors for all angles showgreater than 50% reduction and error variances forall angles show greater than 75% reduction whennuisance and distortion parameter estimation isperformed. The confidence intervals shown in Table4 also clearly demonstrate that estimation of allangles improves considerably when parameter esti-mation is incorporated. However, note that in mostcases nuisance parameter convergence to incorrectvalues occurred to some extent due to poor observ-ability scenarios. Thus the primary result demon-strated by this Monte Carlo example is that, in gen-eral, online magnetometer calibration results inimproved estimation even though convergence ofparameters to their true values is not guaranteed,since the filter can tune alternative parameters inthe measurement equation without having to dis-rupt Euler angle estimates.
Fig. 23–Histogram of RMS errors in / estimation (1,000 totalcases)
Fig. 24–Histogram of RMS errors in h estimation (1,000 totalcases)
Fig. 25–Histogram of RMS errors in w estimation (1,000 totalcases)
Table 3—Mean and Variance of Monte Carlo Results
Mean (deg) Variance (deg2)
No NP NP % Reduction No NP NP % Reduction
/ 20.26 9.89 51.2 220.8 50.7 77.0h 3.97 1.54 61.2 5.80 0.21 96.4w 3.58 1.70 52.5 5.06 0.19 96.3
Vol. 58, No. 3 Rogers et al.: Effective Use of Magnetometer Feedback for Smart Projectile Applications 217
CONCLUSION
The use of magnetometers for orientation estima-tion on-board projectiles is considered. In particu-lar, the effect of spin-induced magnetic field distor-tion is discussed. Analytical, finite element, and ex-perimental techniques are used to characterizemagnetic field distortion effects for typical projectileconfigurations. Then, an estimation algorithm isdeveloped that demonstrates how compensation forfield distortion effects can be performed. The esti-mation algorithm is responsible for orientation esti-mation as well as distortion and magnetometer nui-sance parameter estimation, and consists of threecoupled Extended Kalman filters. An analyticalobservability analysis is then performed to identifyglobally indistinguishable states, which are then re-moved from the estimation problem. An example sim-ulation demonstrates that standard magnetometer-based observers that do not compensate for spin-induced distortion are likely to suffer significantestimation error. Finally, a Monte Carlo simulationdirectly compares estimators with and withoutnuisance and distortion parameter estimation capa-bility, and it is shown that parameter estimationenables significant attitude estimator performanceincreases.
REFERENCES
1. Wahba, G., ‘‘Problem 65–1: A Least Squares Estimateof Satellite Attitude,’’ SIAM Review, Vol. 7, No. 3,July 1965, p. 409.
2. Wahba, G., et al., ‘‘Problem 65-1 (Solution),’’ SIAMReview, Vol. 8, August 1966, pp. 384–386.
3. Shuster, M. D. and Oh, S. D., ‘‘Three-Axis AttitudeDetermination from Vector Observations,’’ Journal ofGuidance and Control, Vol. 4, No. 1, Jan.–Feb. 1981,pp. 70–77.
4. Bar-Itzhak, I. Y. and Reiner, J., ‘‘Recursive AttitudeDetermination from Vector Observations: DirectionCosine Matrix Identification,’’ Journal of Guidance,Control, and Dynamics, Vol. 7, No. 1, Jan.–Feb. 1984,pp. 51–56.
5. Bar-Itzhak, I. Y. and Oshman, Y., ‘‘Attitude Determi-nation from Vector Observations: Quaternion Estima-tion,’’ IEEE Transactions on Aerospace and ElectronicSystems, Vol. AES-21, No. 1, January 1985, pp. 128–136.
6. Bar-Itzhak, I. Y. and Idan, M., ‘‘Recursive AttitudeDetermination from Vector Observations: Euler AngleEstimation,’’ Journal of Guidance, Control, andDynamics, Vol. 10, No. 2, March–April 1987, pp. 152–157.
7. Mortari, D., ‘‘Euler-q Algorithm for Attitude Determi-nation from Vector Observations,’’ Journal of Guid-ance, Control, and Dynamics, Vol. 21, No. 2, March–April 1998, pp. 328–334.
8. Psiaki, M. L., ‘‘Global Magnetometer-Based Space-craft Attitude and Rate Estimation,’’ Journal of Guid-ance, Control, and Dynamics, Vol. 27, No. 2, March–April 2004, pp. 240–250.
9. Ohlmeyer, E., Fraysse, J., and Pepitone, T. R.,‘‘Guidance, Navigation, and Control Without Gyros:A Gun-Launched Munition Concept,’’ AIAA Guid-ance, Navigation, and Control Exhibit, Monterey, CA,August 5–8, 2002, Paper AIAA-2002–5025.
10. Wilson, M. J., ‘‘Onboard Attitude Determination forGun-Launched Projectiles,’’ 43rd AIAA Aerospace Sci-ences Meeting and Exhibit, Reno, NV, January 10–13, 2005, Paper AIAA-2005-1217.
11. Lee, H., Kim, K., and Park, H., ‘‘Roll Estimation of aSmart Munition Using a Magnetometer Based on anUnscented Kalman Filter,’’ AIAA Guidance, Naviga-tion, and Control Exhibit, Honolulu, HI, August 18–21, 2008, Paper AIAA-2008-7460.
12. Harkins, T., ‘‘On the Viability of Magnetometer-BasedProjectile Orientation Measurements,’’ US ArmyResearch Laboratory Technical Report ARL-TR-4310,November 2007.
13. Lerner, G. M. and Shuster, M. D., ‘‘In-Flight Magne-tometer Calibration and Attitude Determination forNear-Earth Spacecraft,’’ Journal of Guidance andControl, Vol. 4, No. 5, September–October 1981, pp.518–522.
14. Alonso, R. and Shuster, M. D., ‘‘Complete LinearAttitude-Independent Magnetometer Calibration,’’Journal of the Astronautical Sciences, Vol. 50, No. 4,October–December 2002, pp. 477–490.
15. Alonso, R. and Shuster, M. D., ‘‘Centering and Observ-ability in Attitude-Independent Magnetometer-BiasDetermination,’’ Journal of the Astronautical Sciences,Vol. 51, No. 2, April–June 2003, pp. 133–141.
16. Alonso, R. and Shuster, M. D., ‘‘Attitude-IndependentMagnetometer-Bias Determination – A Survey,’’Journal of the Astronautical Sciences, Vol. 50, No. 4,October–December 2002, pp. 453–475.
17. Crassidis, J. L., Lai, K., and Harman, R. R., ‘‘Real-TimeAttitude-Independent Three-Axis Magnetometer Cali-bration,’’ Journal of Guidance, Control, and Dynamics,Vol. 28, No. 1, January–February 2005, pp. 115–120.
Table 4—Confidence Intervals of Monte Carlo Results (Results in Degrees)
50% Confidence Interval 75% Confidence Interval 90% Confidence Interval
No NP NP % Red. No NP NP % Red. No NP NP % Red.
/ 16.06 7.81 51.4 23.51 13.11 44.2 38.92 19.00 51.2h 3.34 1.48 55.7 5.17 1.79 65.4 7.04 2.13 69.7w 2.88 1.66 42.4 4.52 1.96 46.4 6.70 2.25 66.4
218 Navigation Fall 2011

18. Gebre-Egziabher, D., ‘‘Magnetometer AutocalibrationLeveraging Measurement Locus Constraints,’’ Journal ofAircraft, Vol. 44, No. 4, July–August 2007, pp. 1361–1368.
19. Perry, M. P. and Jones, T. B., ‘‘Eddy Current Induc-tion in a Solid Conducting Cylinder with a Trans-verse Magnetic Field,’’ IEEE Transactions on Mag-netics, Vol. MAG-14, No. 4, July 1978, pp. 227–232.
20. Ziolkowski, M. and Gratkowski, S. R., ‘‘Shieldingfrom External Magnetic Fields by Rotating Nonmag-
netic Conducting Cylindrical Shells,’’ IEEE Transac-tions on Electromagnetic Compatability, Vol. 51, No.3, August 2009, pp. 720–724.
21. Nijmeijer, H. and van der Schaft, A. J., NonlinearDynamical Control Systems, Springer-Verlag, NewYork, 1990, pp. 95–96.
22. US National Geospatial-Intelligence Agency, Techni-cal Document for the World Magnetic Model (WMM),Released February 3, 2010.
Vol. 58, No. 3 Rogers et al.: Effective Use of Magnetometer Feedback for Smart Projectile Applications 219