dynamic circuits: frequency domain analysis
TRANSCRIPT

1
Electronic Circuits 1
Dynamic circuits:Frequency domain analysis
Prof. C.K. Tse: Dynamic circuits:Frequency domain analysis
Contents• Free oscillation and natural frequency• Transfer functions• Frequency response• Bode plots

2Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
System behaviour: overview

3Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
System behaviour : review
♦ solution = transient + steady state
♦ Mathematically,♦ Transient = complementary function (solution of the system
when the sources are zero♦ Steady state = particular solution when the sources are applied
natural response(system characteristic, c.f.personality of a person)
forced response(system altered by external force,
c.f. personality changes due topeer influence)

4Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Natural response (free oscillation)
♦ The natural response is important because it gives thecharacteristic of the circuit.
♦ The characteristic (like stability, transient speed, etc.) ofthe system can be studied by looking at its naturalresponse.
♦ Natural response has nothing to do with the external forces. Hence,we can just look at the circuit with ALL SOURCES reduced to zero.♦ Short circuit all voltage sources♦ Open circuit all current sources
The resulting circuit is called the FREE OSCILLATING circuit.

5Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Free oscillating version of a circuit
Free oscillating circuit
Natural response:
6Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
StabilityDefinition from my book:
p. 147

7Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Stability test
Inspect the free oscillating circuitFind its solution (i.e., natural response)Check if the solution goes to zero as time tends to ∞.
Test procedure:
Suppose the system is:
The solution is:
Here, λi are eigenvalues (natural frequencies) which can be real or complex.
Clearly, stability requires that ALL λi are negative or having negative realparts.

8Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Example: first-order response
The free-oscillating response is:
The system is stable if λ < 0; otherwise it is unstable.
stable unstable

9Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Example: second-order responseThe free-oscillating response is:
Case 1: eigenvalues are realStable if λ1 and λ2 are both negative.
Case 2: eigenvalues are complex, i.e.,Solution is
Stable if α is negative
x t A e A et t( ) = +1 21 2λ λ
λ α ω1 2, = ± j
x t e A t B tt( ) ( sin cos )= +α ω ωstableunstable
10Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Stability and characteristic equation
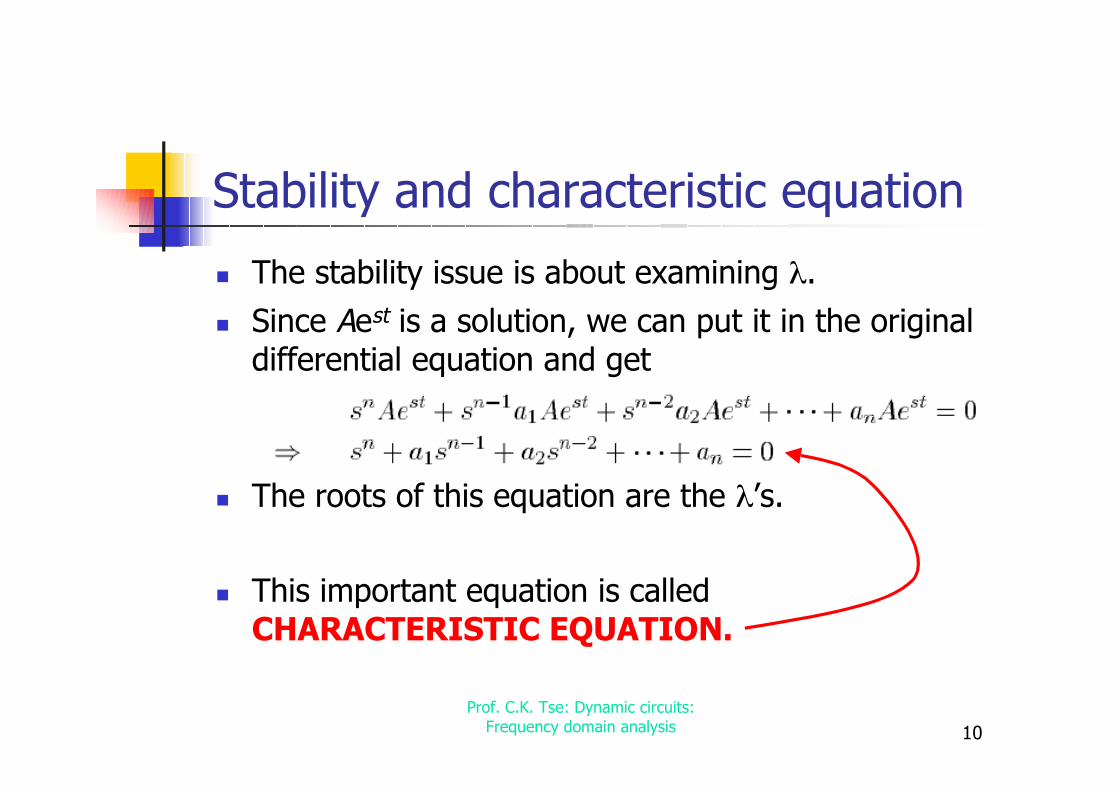
The stability issue is about examining λ.
Since Aest is a solution, we can put it in the originaldifferential equation and get
The roots of this equation are the λ’s.
This important equation is calledCHARACTERISTIC EQUATION.

11Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
ExampleSuppose we wish to study the stability of this circuit.We look at the free-oscillating circuit:
State equation is:
or
The characteristic equation is

12Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Example
Solving the characteristic equation gives
Clearly, if R, L and C are positive, then all λ’s are negative.

13Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Natural frequenciesNatural frequencies = eigenvalues, λk
Roots of characteristic equation
For an nth order system, there are n natural frequencies.
The system solution is
complex
Exponential decayExponential growth (unstable)
OscillatoryOscillatory with decaying amp
Oscillatory with growing amp (unstable)
dynamical modes

14Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
The complex frequency planejω
σ
t
Exponential decay
t
Exponential growth
x
x sine wave
s-plane
x
x
x
x

15Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
SourcesSuppose a voltage has a complex frequency s.
v(t) = Vo est
If s = ±jω, then it is pure sinusoidal since
Sine waves have pure imaginary frequencies, ±jω rad/sec.
cosω
ω ωt
e ej t j t=
+ −
2

16Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
ImpedancesWe can also extend the concept of complex frequency to impedance.
Recall: in last lecture, we said that• the impedance of an inductor is jωL when it is driven by a sinesource.• the impedance of a capacitor is 1/jωC when it is driven by asine source.
Now, we imagine the driving frequency is s. Thus, we have
ZL = sLZc = 1/sC
VL = sL ILIC = sC VC

17Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
ExampleConsider the impedance:
Thus, we can write:
The free-oscillating circuit will have
The characteristic equation is
The natural frequency (eigenvalue) is λ = 1/CR which is 1/τ.

18Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Transfer functionsTransfer function — ratio of two quantities1. Voltage gain: v2/v12. Current gain: i2/i1 3. Trans-admittance: i2/v14. Trans-impedance: v2/i1
+–V1
driven at s
I2F(s) = I2(s)/V1(s)
in the s domain
all voltages and currents are set to frequency s
linear circuit

19Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
ExampleSuppose the circuit is driven by V1 at frequency s.
So, the inductor impedance = sL the capacitor impedance = 1/sC
We can redraw the circuit as
The transfer function from V1 to V2 is

20Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Getting characteristic equation from transfer function
The transfer function from V1 to V2 is
Clearly, the free-oscillating circuit can be formed by setting V1=0.
Thus, the characteristic equation is just
= 0
In general,
F(s) =
Char. Eqn. is
D(s) = 0
21Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Transfer function on complex plane
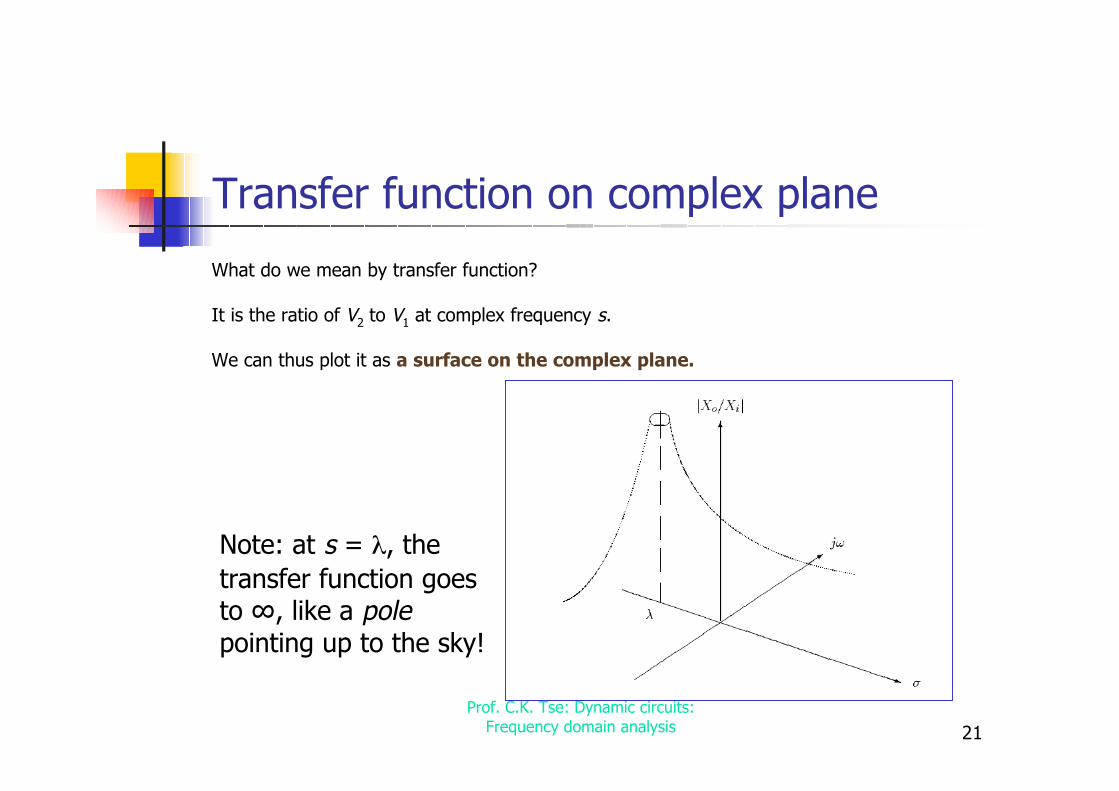
What do we mean by transfer function?
It is the ratio of V2 to V1 at complex frequency s.
We can thus plot it as a surface on the complex plane.
Note: at s = λ, thetransfer function goesto ∞, like a polepointing up to the sky!
22Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Meaning of transfer function
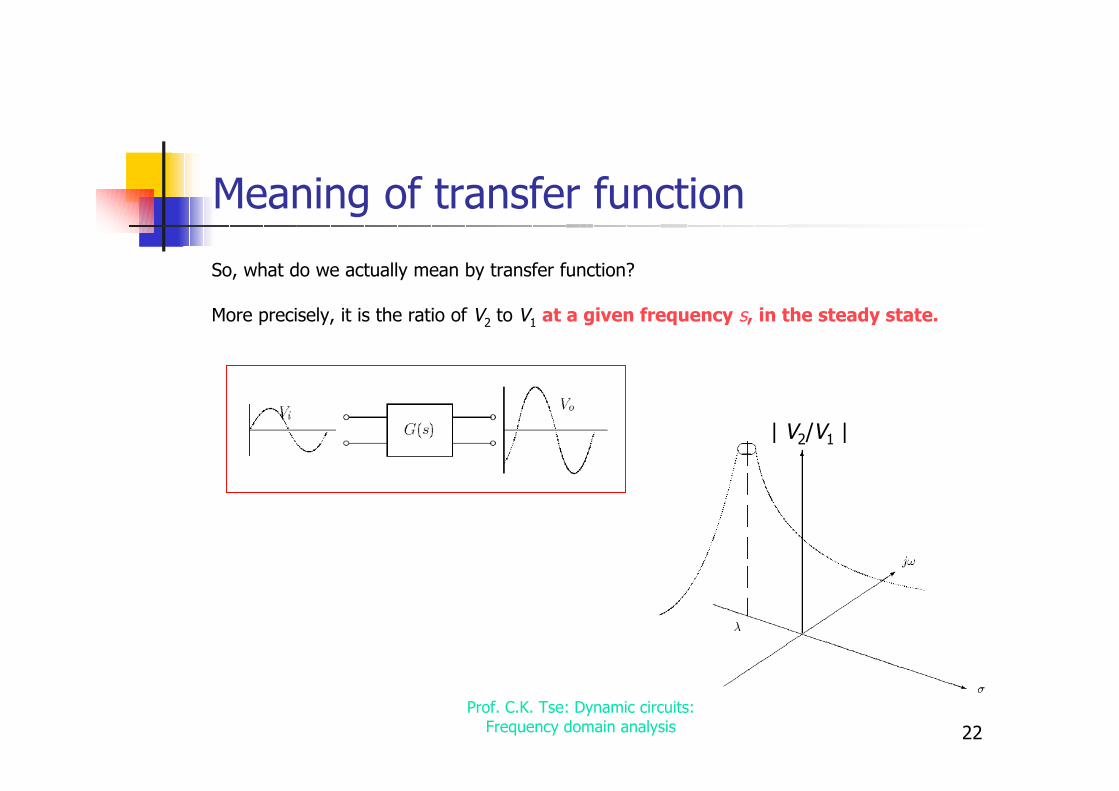
So, what do we actually mean by transfer function?
More precisely, it is the ratio of V2 to V1 at a given frequency s, in the steady state.
| V2/V1 |

23Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Frequency responseIn particular, if we put s = jω, the input is a sinusoidal driving source.In other words, we are looking at the cross section of the surface when it iscut along the imaginary axis (y-axis).
| V2/V1 |

24Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Frequency response vs. transientConsider a simple first-order system.
The frequency response has a pole at s = λ.The transient is A exp (λt).
So, there is correspondence between frequency response and transient.
| V2/V1 |
v2(t) = Aeλt1s + λ
t

25Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
More examples
time domain frequency domain
Recall: Laplace transform pairs

26Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
First-order low-pass frequency response
The transfer function of a first-order low-passRC filter is
G sV sV s
sCR sC sCR
( )( )( )
//
= =+
=+
2
1
11
11
Hence, 1. this transfer function has a pole at
p
CR= −
1
2. for large magnitudes of s (i.e., |s\ → ∞), G(s) goes to 0.
(At this frequency, G(s) goes to ∞.)
From this, we can roughly sketch G(s) on the complex plane.

27Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Rubber sheet analogy
Pole: –1/CRmagnitude goes to ∞.
All surroundings go to 0,for large |s|.

28Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
First-order low-pass frequency response

29Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Rubber sheet analogy
Bandwidth depends on –1/CR

30Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Frequency response close-up
Observations:
If the pole is further away from theorigin, then the frequency responsestarts to drop off at a higherfrequency.
At ω = 1/CR rad/s, the response dropsto 0.7071 of the dc value, which isexactly 3 dB below the dc value.3dB corner frequency
=1/CR
G jj CR C R
( )ωω ω
=+
=+
11
1
1 2 2 2
Exact formula:

31Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Example
Consider a first order circuit having thefollowing transfer function:
The eigenvalue is –10000.
The time domain response of the free-oscillatingsystem is: y(t) = A e–10000t
In the frequency domain, the ratio |Y/X| is 10 at dc,and starts to drop at around 10000 rad/s (or 1.59kHz) which is the 3dB corner frequency.
Y sX s s
( )( )
=
+
10
110000
10000 rad/sor1.59 kHz
10
7.0712.929
|Y/X|

32Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
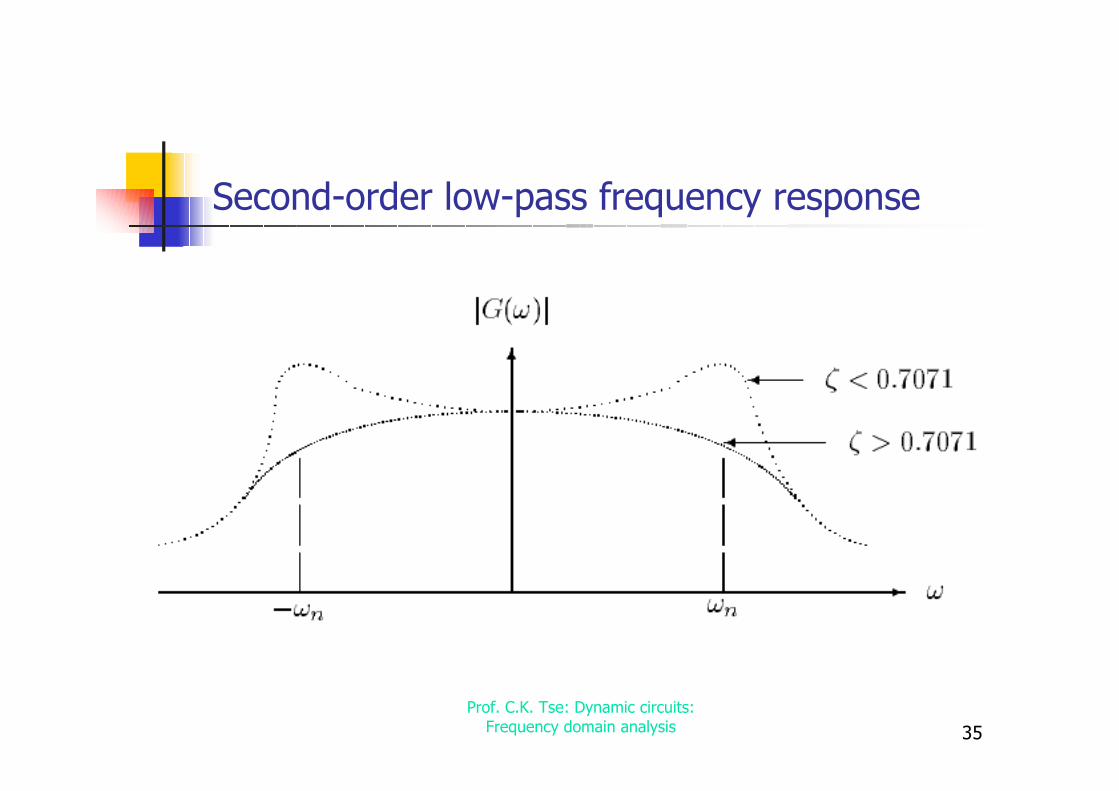
Second-order low-pass frequency response withcomplex pole pair
Consider a second order circuit having thefollowing transfer function:
Suppose the eigenvalues are complex.
The response depends on ζ.
G ss s
n n
( ) =
+ +
1
12 2
2
ς
ω ω
s jn n= − ± −ςω ω ς1 2
Here,ζ is the damping factorωn is the resonant frequency
complex poles
ζ < 0.7071 : light damping — freq response shows a peakingζ > 0.7071 : heavy damping — freq response shows no peakingωn is roughly where the corner frequency is.

33Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Complex pole pair seen on the s-plane
The complex frequency plane is often called the s-plane.

34Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Second-order low-pass frequency response:Rubber sheet analogy
35Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Second-order low-pass frequency response

36Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Resonance: a special case where ζ is small
“Exact” resonance: when drivingfrequency is exactly the naturalfrequency (eigenvalue), the response isinfinitely large!
But, if you can only have sine waves asdriving sources, then you can’t haveexact resonance for systems withcomplex poles.
Near resonance: for systems with ζ <0.7071, the response has a peak aroundω = ω n (actually to be moreaccurate).
For small ζ, we can say that the systemnearly resonates at ω n.
ω ςn 1 2− ω ≈ ω n
small ζ
|G|
ω

37Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
LC resonant circuits (theoretical cases: ζ = 0)
ω = ωn
ζ = 0
|Y| or |Z|
ω
L
C
+V(s)
–
I(s) Y s
I sV s
sC
s LC( )
( )( )
= =+1 2
L C+
V(s)–
I(s) Z s
V sI s
sL
s LC( )
( )( )
= =+1 2
In these cases, we see exact resonance because the natural frequencies fall on the imaginary axisand we can find sine wave driving sources. But, the question is “do we have perfect inductor andcapacitor, without resistance?”
Poles are ±jωn
Short-circuit at ω = ωn.
Poles are ±jωn
Open-circuit at ω = ωn.

38Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
More example on frequency response
In the steady-state, we can applyconventional analysis (like nodal) to get
G GsL
G
G G G sC
V
V
G Vin1 2 2
2 2 3
1
2
11
0
+ + −
− + +
=
Thus, the input to output transfer function is
For s=0, |V2/Vin| → 0
For s→j∞, |V2/Vin| → 0
So, it’s a bandpass

39Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Poles and zeros: review
In general the transfer function is
Poles — roots of D(s) = 0points on s-plane where |G| goes to ∞.
Zeros — roots of N(s) = 0points on s-plane where |G| goes to 0.
For real systems, the degree of N(s) is always less than or equal tothat of D(s), so that there cannot be more zeros than poles!WHY? Think about what happens when s → ∞.

40Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Example
Poles : –2±j3 and –10points on s-plane where |G1| goes to ∞.
Zeros : 0 and ±j10points on s-plane where |G1| goes to 0.
Also,
Consider
lim | ( ) |s
G s→∞
=1 1

41Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Rubber sheet analogy
bandpass

42Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Story half told! How about phase?
Frequency response should characterized by- Magnitude- Phase shift
For sinusoidal driving signals, we consider G(jω).
Consider the simple RC circuit.The transfer function is
The phase shift is given by
G jV jV j j CR
( )( )( )
ωω
ω ω= =
+2
1
11
φ ω( )j = −phase shift due to nominator phase shift due to denominator
φ ω ω( ) arctan( )j CR= −0

43Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Full frequency response of RC circuit
φ ω ω( ) arctan( )j CR= −0
G jV jV j j CR
( )( )( )
ωω
ω ω= =
+2
1
11
G jj CR C R
( )ωω ω
=+
=+
11
1
1 2 2 2Mag:
Phase:

44Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Phase response of second-order systemwith a complex pole pair
φ ω
ςω
ω
ω
ω
ςω
ω ω
( ) arctan
arctan
= −
−
−−
0
2
1
2
2
2
2 2
n
n
n
=
Phase:
G jj j
n n n n
( )ωως
ω
ω
ω
ω
ω
ως
ω
=
+ −
=
−
+
1
12
1
122
2
2
2
G ss s
n n
( ) =
+ +
1
12 2
2
ς
ω ω
⇒

45Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Phase response of second-order systemwith real poles
φ ω
ω ω( ) arctan arctan= −
−
1 1000
Phase:
G j
jj
( )
( )
ω
ωω
=
+ +
1
1 11000
G s
ss
( )
( )
=
+ +
1
1 11000
⇒
–90

46Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Plotting frequency response
Direct method:direct substitution of s = jω in the transfer function, and plot themagnitude and phase as a function of frequency.
e.g.,
Magnitude and phase are functions of ω:
Then, we can plot them by any means,e.g., Matlab, mathematica, etc.
G jj CR
( )ωω
=+
11
| ( ) |G jC R
ωω
=+
1
1 2 2 2
θ ω ω( ) arctan= ( )CR

47Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Plotting it with linear scale
| ( ) |G jC R
ωω
=+
1
1 2 2 2
θ ω ω( ) arctan= ( )CR

48Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Plotting frequency response
Problem with scaling
As seen before, the plots are usually nonlinear— some square withina square root, etc. and some arctan function!
The most difficult problem with linear scale is the limited range.
10 20 30 40 50 60 70 … where is 1000?
LINEAR SCALE:

49Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Log scale
If the x-axis is plotted in log scale, then the range can be widened.
1 10 100 103 104 105 106 107 …
LOG SCALE:

50Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode technique : asymptotic approximation
Consider the same first-order transfer function
The square of the magnitude is:
Take the log of both sides and multiply by 20:
Define
20 10 1 2 2 2log ( ) log( )G C Rω ω= − +
G jj CR
( )ωω
=+
11
GC R
( )ωω
2
2 2 2
1
1=
+
y Gx
=
=
20log| ( ) |log
ω
ω
The unit of y is the decibel (dB)
51Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode technique for plotting frequency response
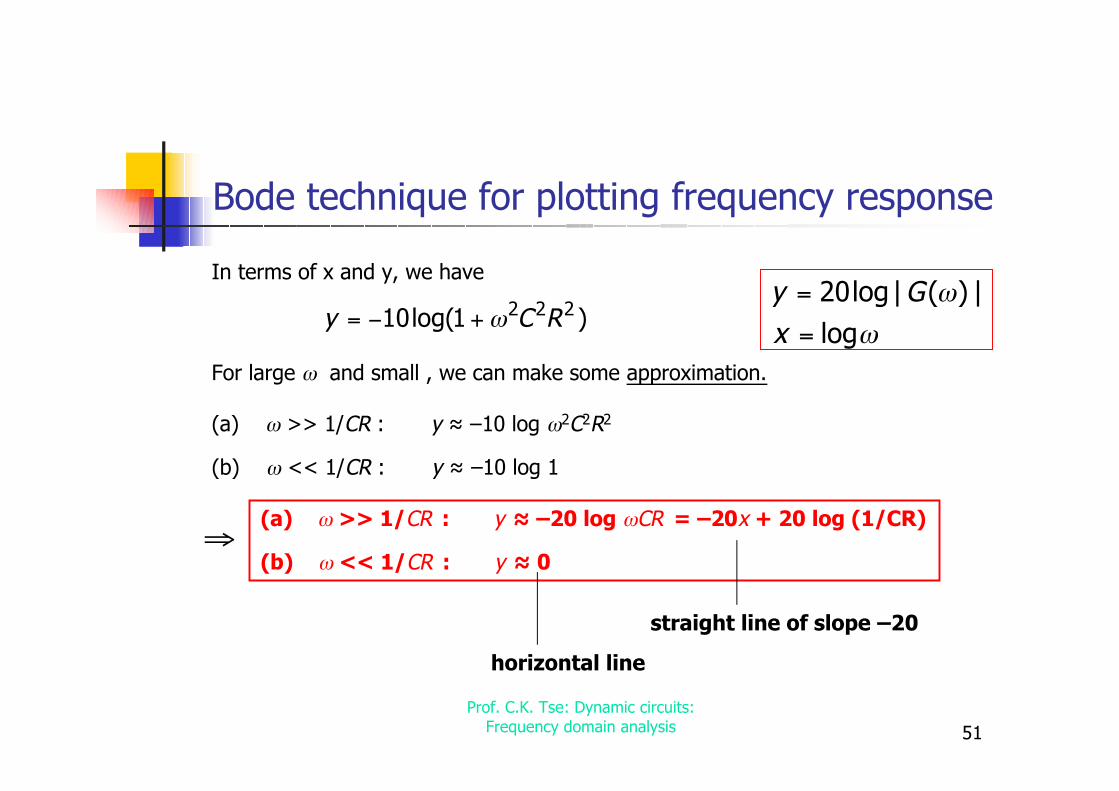
In terms of x and y, we have
For large ω and small , we can make some approximation.
(a) ω >> 1/CR : y ≈ –10 log ω2C2R2
(b) ω << 1/CR : y ≈ –10 log 1
y C R= − +10 1 2 2 2log( )ω
(a) ω >> 1/CR : y ≈ –20 log ωCR = –20x + 20 log (1/CR)
(b) ω << 1/CR : y ≈ 0⇒
y Gx
=
=
20log| ( ) |log
ω
ω
straight line of slope –20
horizontal line

52Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode approximation (magnitude)(a) ω >> 1/CR : y ≈ –20x + 20 log (1/CR)
(b) ω << 1/CR : y ≈ 0
The trick is:
If we plot y versus x,then we get straightlines as asymptotesfor large and small ω.
Note:The approximation ispoor for ω near 1/CR.

53Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode approximation (phase)
The approximation is
θ ω ω( ) arctan= ( )CRSame example:
θ ω
ω
ω
ω
( )
≈ <<
= − =
≈ − >>
01
451
901
for
for
for
CR
CR
CR
one decade below 1/CR
one decade above 1/CR

54Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode plots: general technique
Since Bode plots are log-scale plots, we may plot any transferfunction by adding together simpler transfer functions which makeup the whole transfer function.
G s
s s
s s s( ) =
+×
+
+
+
×
+
12 10
1100
15000
14 10
110
4
6 8
Plot A Plot B
Plot C Plot D Plot E

55Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode plots: standard forms
1. Simple pole
2. Simple zero
3. Integrating pole
4. Differentiating zero
5. Constant
6. Complex pole pair
G s
s p( ) =
+
11
G s s z( ) = +1
G s
s p( )
/=
1
G ssz
( ) =
G s A( ) =
G ss s
n n
( ) =
+ +
1
12 2
2
ς
ω ω

56Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode plots: standard forms
Simple pole:
(logscale)
(logscale)

57Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode plots: standard forms
Simple zero:
(logscale)
(logscale)

58Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode plots: standard forms
Integrating pole:(logscale)
(logscale)

59Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode plots: standard forms
Differentiating zero:(logscale)
(logscale)

60Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode plots: standard forms
Constant:
(logscale)
(logscale)

61Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Bode plots: standard forms
Complex pole pair
(logscale)
(logscale)

62Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Example
simple zero
simple pole
constant
differentiating pole
Note: ω = 2πf
If ω = 200π rad/s,f = 100 Hz.

63Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Example

64Prof. C.K. Tse: Dynamic circuits:
Frequency domain analysis
Semi-log graph paper allows compressed x-axis
1 10 100 103 104 105 106
Effectively, the x-axisis being log’ed0 1 2 3 4 5 6usual label forpractical convenience