d. chablat - centrale nanteschablat/cao_catia/13_mannequin.pdfoutline • objects – insert a...
TRANSCRIPT
Human Simulation
D. Chablat
Outline
• Objects– Insert a mannequin– Insert a table– Insert a floor– Insert a glass– Insert a chair
• Simulation– Place the mannequin
on the chair– Move the glass– Add the vision
parameter
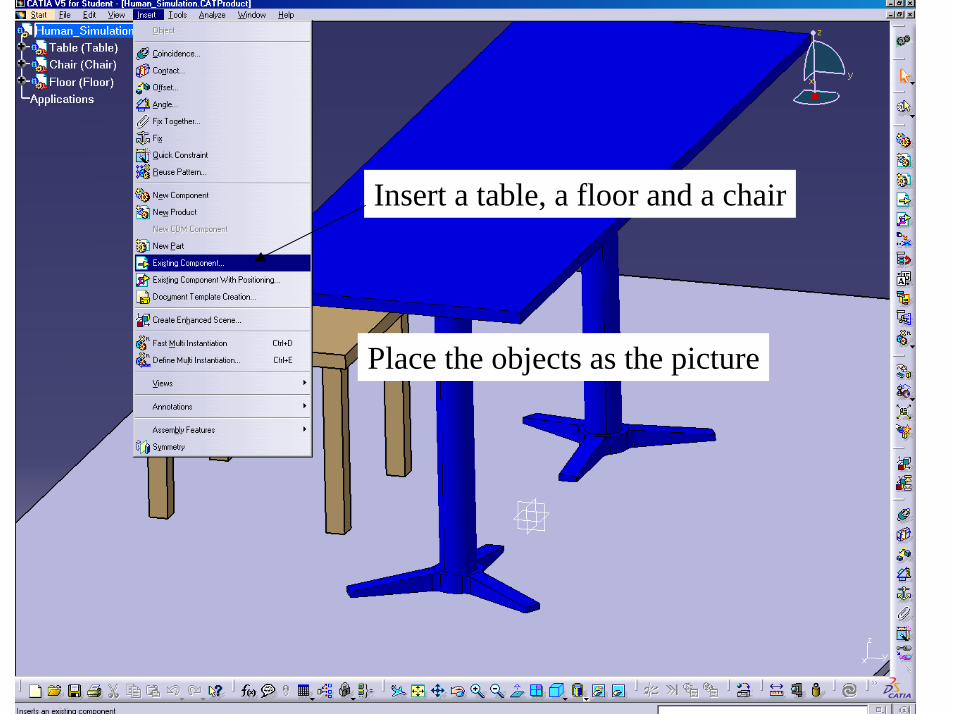
Insert a table, a floor and a chair
Place the objects as the picture
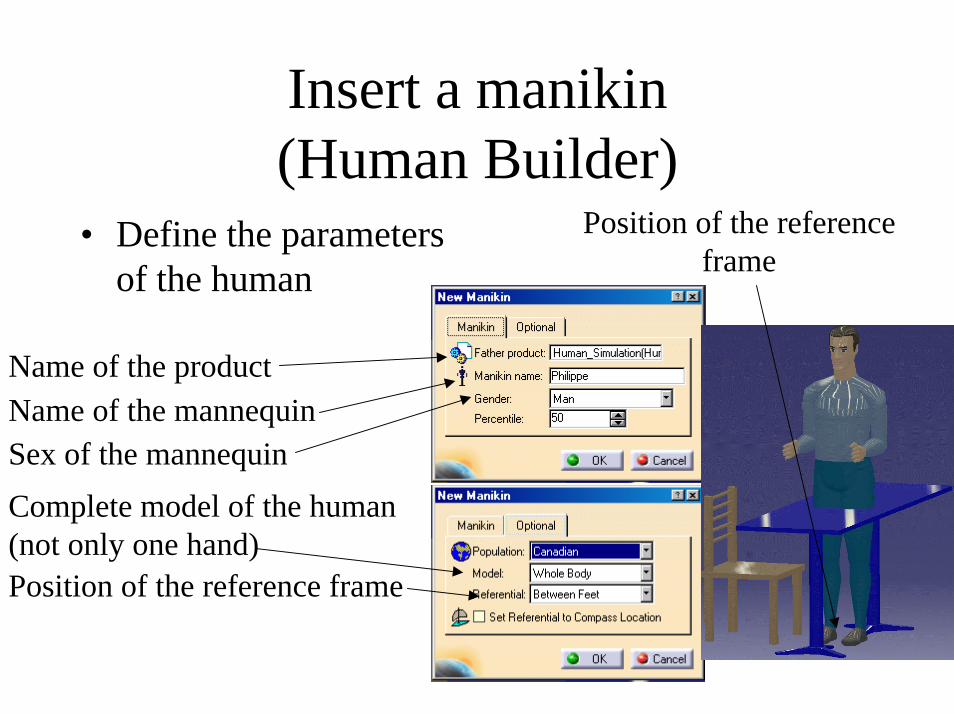
Insert a manikin (Human Builder)
• Define the parameters of the human
Name of the productName of the mannequinSex of the mannequin Complete model of the human(not only one hand)Position of the reference frame
Position of the referenceframe
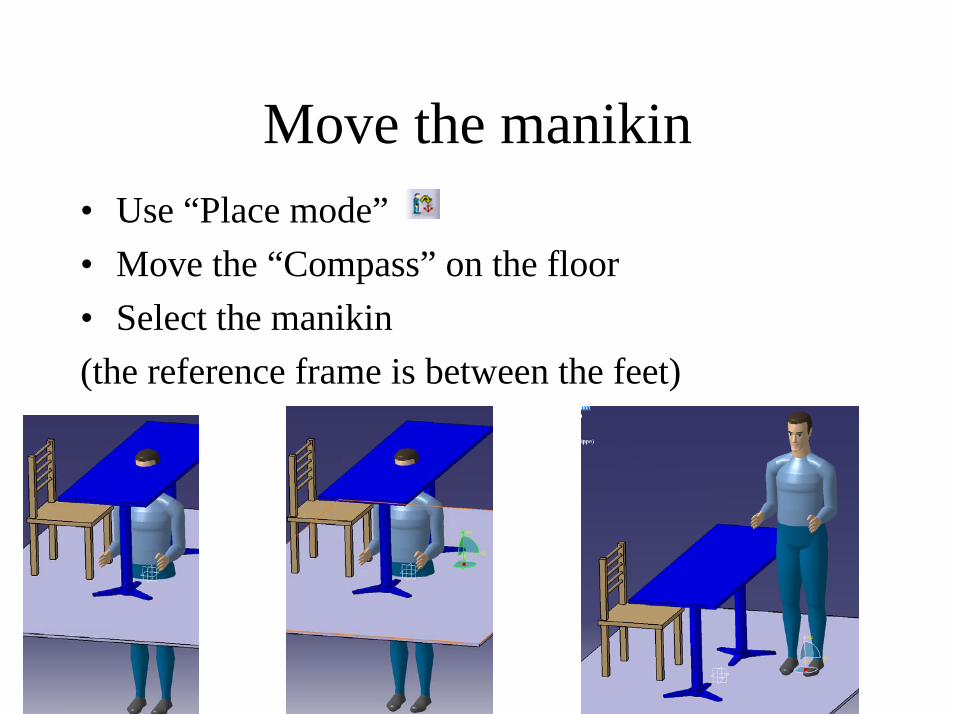
Move the manikin• Use “Place mode”• Move the “Compass” on the floor• Select the manikin(the reference frame is between the feet)
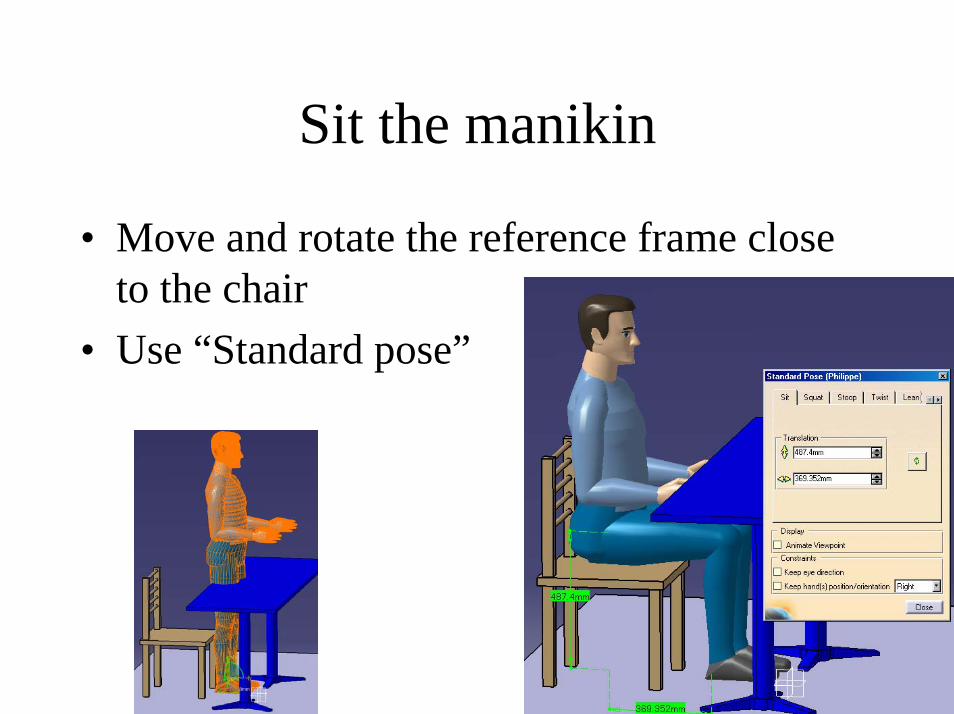
Sit the manikin
• Move and rotate the reference frame close to the chair
• Use “Standard pose”

Adjust its posture
• Check if the manikin is well seated• Translate is needed
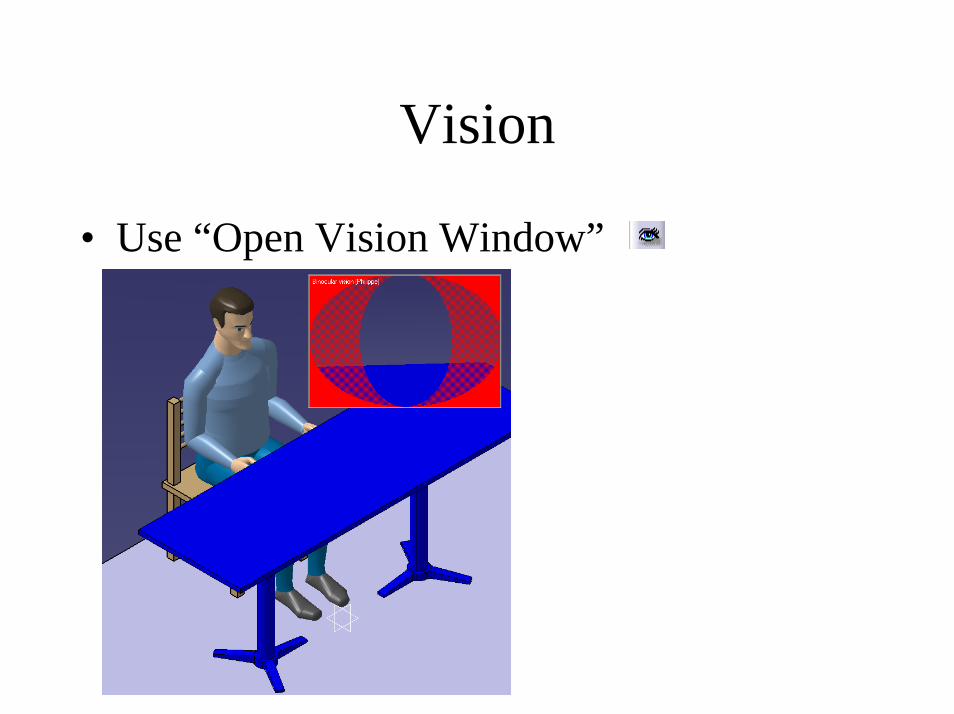
Vision
• Use “Open Vision Window”
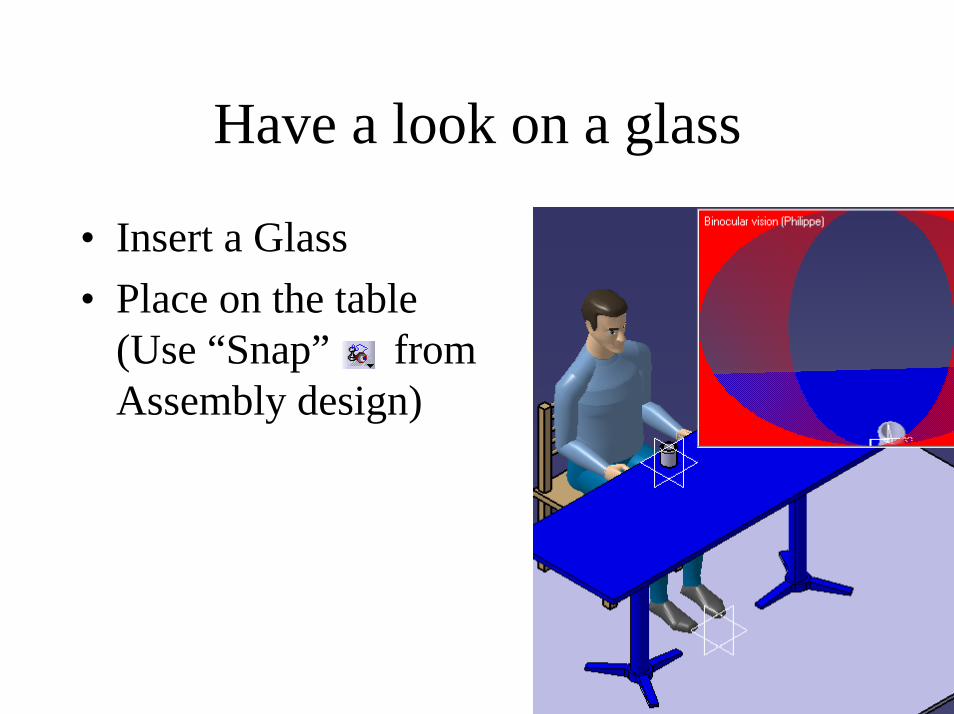
Have a look on a glass
• Insert a Glass• Place on the table
(Use “Snap” from Assembly design)
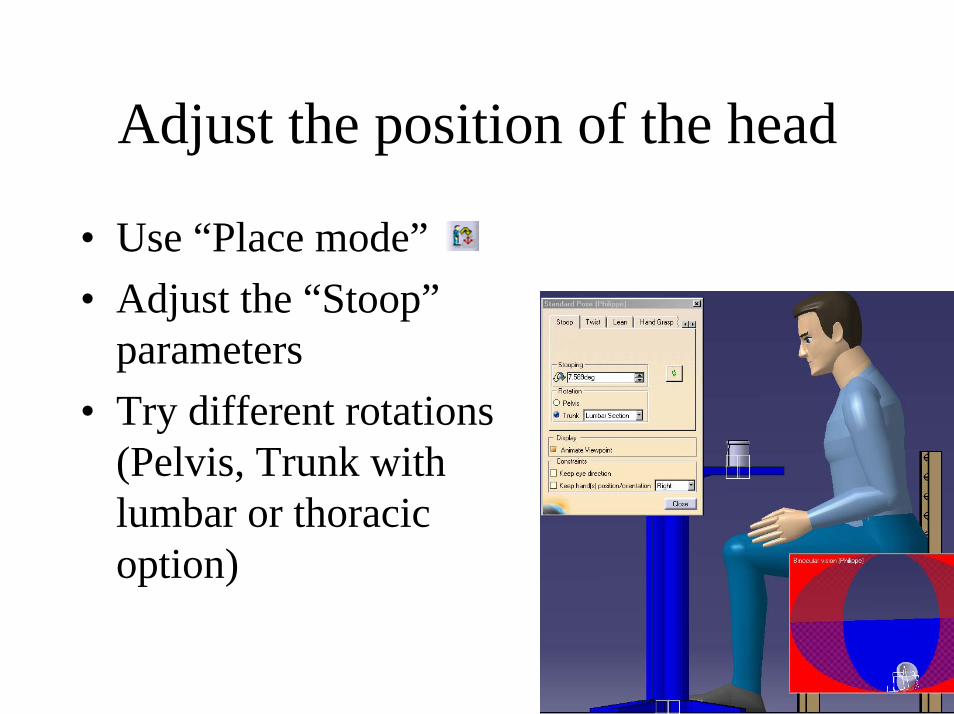
Adjust the position of the head
• Use “Place mode”• Adjust the “Stoop”
parameters• Try different rotations
(Pelvis, Trunk with lumbar or thoracic option)
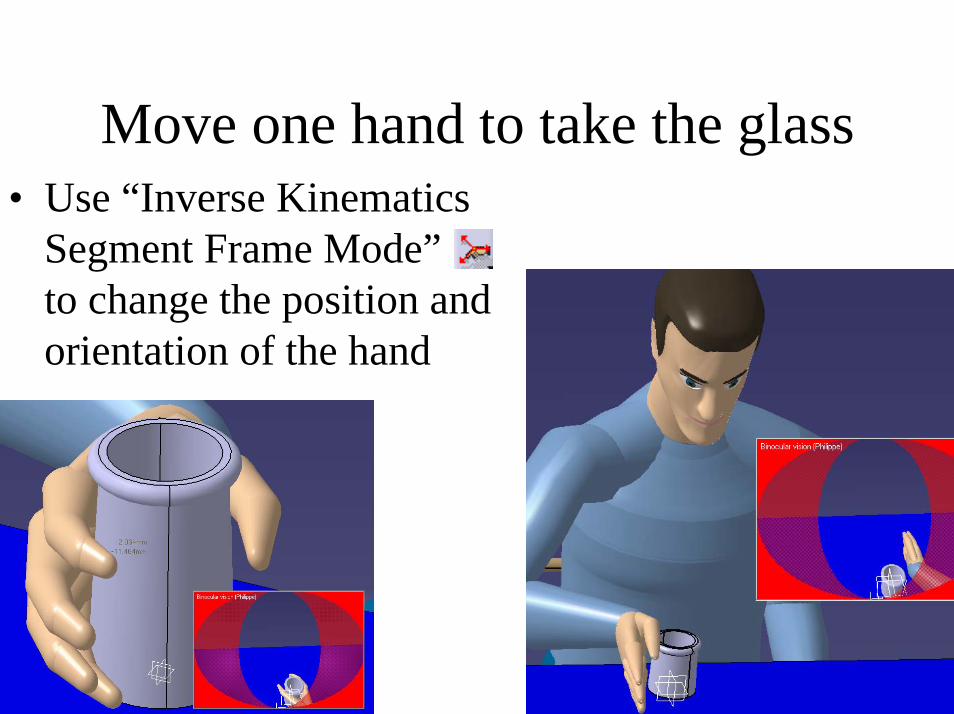
Move one hand to take the glass• Use “Inverse Kinematics
Segment Frame Mode” to change the position and orientation of the hand
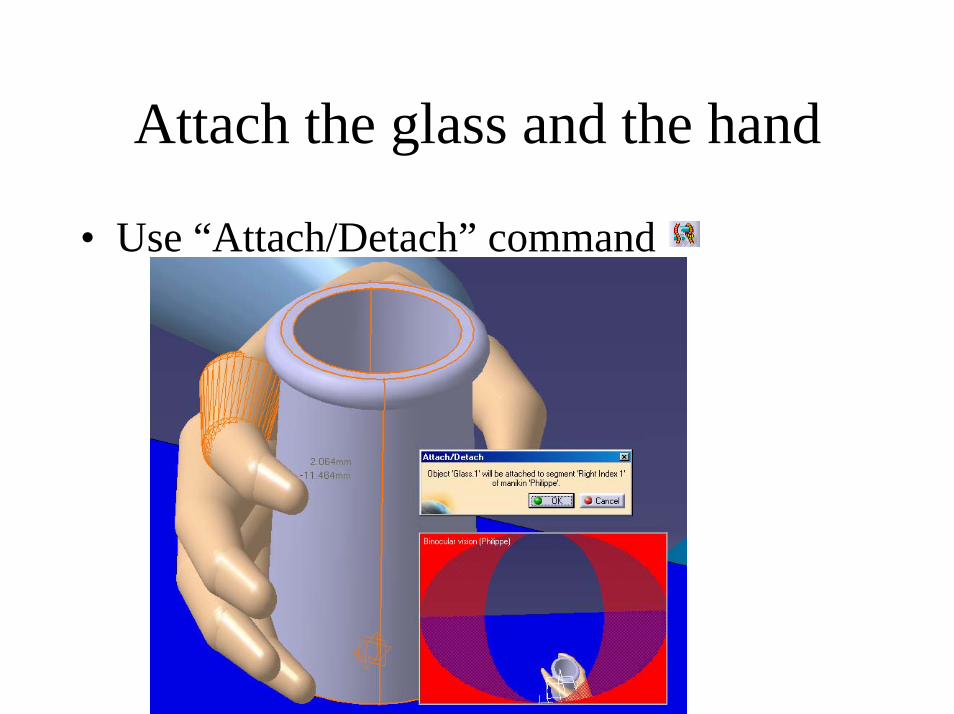
Attach the glass and the hand
• Use “Attach/Detach” command
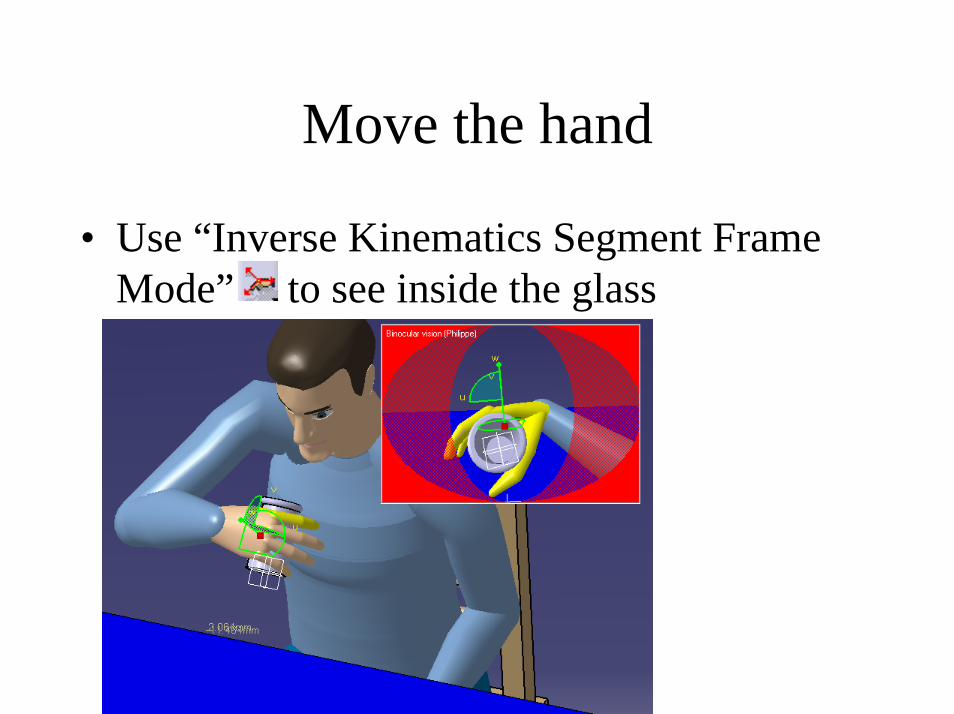
Move the hand
• Use “Inverse Kinematics Segment Frame Mode” to see inside the glass
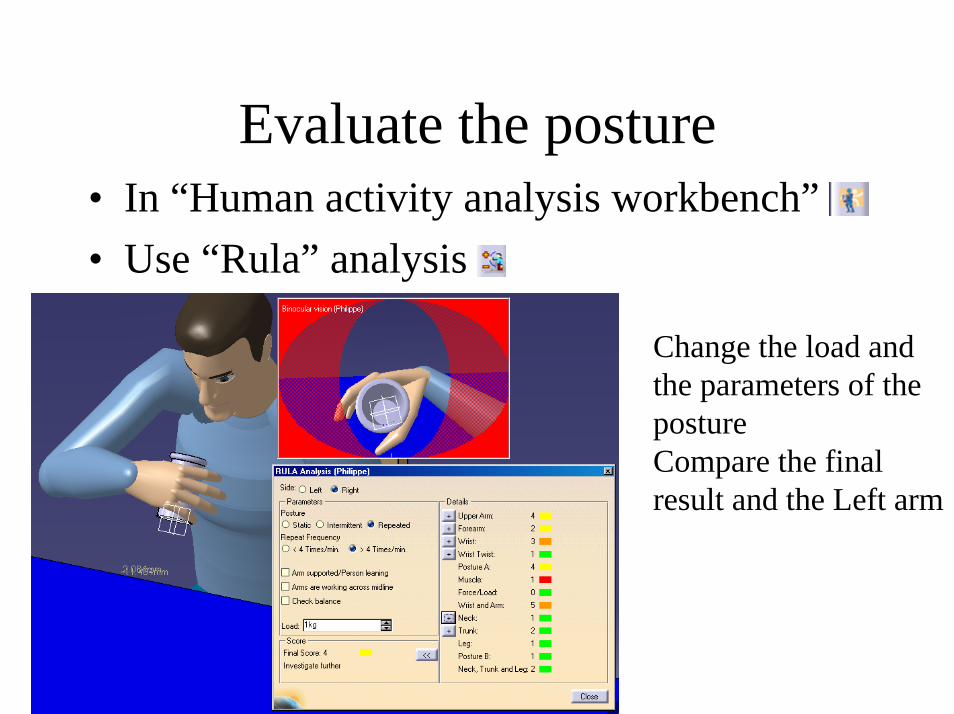
Evaluate the posture• In “Human activity analysis workbench”• Use “Rula” analysis
Change the load andthe parameters of thepostureCompare the final result and the Left arm