cuarta calificada de modelos lineales.pdf
TRANSCRIPT

UNIVERSIDAD NACIONAL DE INGENIERIA
CURSO: Modelos Lineales
TEMA: Modelos de Rango Incompleto
PROFESOR: Luis Huamanchumo de la Cuba
INTEGRANTES:
Nombre: Simon Miranda Richard Max
Código: 20072149E
Nombre: Galdo Siccha Daniel
Código: 20101354G

INDICE:
1. teoremas introductorios (pág. 3)
1.1. Teorema 1 (pág. 3)
1.2. Teorema 2 (pág. 3)
1.3. Teorema 3 (pág. 4)
2. Propiedad 2 de la matriz de Helmert (pág. 5)
2.1. Prueba de 𝑷𝟏𝑷𝟏′ =
𝑱𝒏𝒏⁄ (pág. 6)
2.2. Prueba de 𝑷𝟏′ 𝑷𝟏 = 𝟏 (pág. 6)
2.3. Prueba de 𝑷𝟏′ 𝑷𝒏 = 𝟎𝟏𝐱(𝐧−𝟏). (pág. 6)
2.4. Prueba de 𝑷𝒏′ 𝑷𝒏 = 𝑰𝒏−𝟏. (pág. 7)
2.5. Prueba de 𝑷𝒏𝑷𝒏′ = (𝑰𝒏 −
𝑱𝒏
𝒏). (pág. 9)
3. Lemma de Bath (pág. 10)
4. Teorema de la diapositiva 14 (pág. 11)
5. La tabla ANVA del modelo de dos factores con interaccion y efectos
aleatorios (pág. 12)
5.1. Formas cuadráticas (pág. 13)
5.2. Cuadrados medios (pág. 18)
5.3. Distribución de las fuentes de variación utilizando matriz de
Helmert. (pág. 21)
1. Teoremas introductorios

1.1. Teorema 1
Dada A una matriz mxm con valores característicos α1, α2. . , αm y dado B una matriz nxn con
valores característicos β1, β2. . , βn . Los valores característicos de 𝐀 ⊗ 𝐁 (o 𝐁 ⊗ 𝐀 ) son los mn
valores característicos αiβj para i = 1,….., m y j = 1,…., n.
Prueba.- )
Si A es una matriz mxm con valores característicos 𝛂𝟏, 𝛂𝟐. . , 𝛂𝐦 y B una matriz nxn con
valores característicos 𝛃𝟏, 𝛃𝟐. . , 𝛃𝐧 . Entonces podemos definir las matrices no singulares S y T
de tal manera que:
𝐒−𝟏 ∗ 𝐀 ∗ 𝐒 = 𝐋
𝐓−𝟏 ∗ 𝐁 ∗ 𝐓 = 𝐌
Donde L y M son matrices triangulares superiores cuyos elementos de las diagonales son los
valores característicos de A y B, respectivamente. Por lo tanto,
(𝐒−𝟏 ⊗ 𝐓−𝟏)(𝐀 ⊗ 𝐁)(𝐒 ⊗ 𝐓) = 𝐋 ⊗ 𝐌
Dado que 𝐒−𝟏 ⊗ 𝐓−𝟏 es la inversa de de 𝐒 ⊗ 𝐓, por propiedad de producto Kronecker,
entonces se deduce que 𝐀 ⊗ 𝐁 y (𝐒−𝟏 ⊗ 𝐓−𝟏)(𝐀 ⊗ 𝐁)(𝐒 ⊗ 𝐓) tienen el mismo conjunto de
valores característicos, por tanto 𝐀 ⊗ 𝐁 y 𝐋 ⊗ 𝐌 tienen el mismo conjunto de valores
característicos. Pero 𝐋 ⊗ 𝐌 es una matriz triangular superior, debido al hecho de que L y M
son matrices triangular superior; sus valores característicos son por lo tanto, sus elementos de
la diagonal αi ∗ βj . Esto concluye la prueba.
1.2. Teorema2
Dado A una matriz mxn de rango r y B una matriz pxq de rango s, 𝐀 ⊗ 𝐁 tiene rango rs.
Prueba.- )
Si A una matriz mxn de rango r y B una matriz pxq de rango s, entonces podemos
descomponer las matrices convenientemente (usando factorización QR):
𝐀 = 𝐐𝐀 ∗ 𝐑𝐀 y 𝐁 = 𝐐𝐁 ∗ 𝐑𝐁 usando Factorizacion QR
Donde 𝐐𝐀 y 𝐐𝐁 son matrices ortogonales de orden mxn y pxq respectivamente, 𝐑𝐀 y 𝐑𝐁 son
matrices triangular superior.
Entonces podemos afirmar que, 𝐫𝐚𝐧𝐤(𝐀 ⊗ 𝐁) = 𝐫𝐚𝐦𝐤(𝐐𝐀 ∗ 𝐑𝐀 ⊗ 𝐐𝐁 ∗ 𝐑𝐁)
𝐫𝐚𝐧𝐤(𝐀 ⊗ 𝐁) = 𝐫𝐚𝐦𝐤((𝐐𝐀 ⊗ 𝐐𝐁)(𝐑𝐀 ⊗ 𝐑𝐁)
𝐫𝐚𝐧𝐤(𝐀 ⊗ 𝐁) = 𝐫𝐚𝐦𝐤(𝐑𝐀 ⊗ 𝐑𝐁)

Dado que 𝐑𝐀 y 𝐑𝐁 ambas son matrices triangular superior, entonces 𝐑𝐀 ⊗ 𝐑𝐁 es triangular
superior con bloques triangular superior. Sea ramk(𝐑𝐀) = 𝐫𝐀 y ramk(𝐑𝐁) = 𝐫𝐁. Cada fila
de los bloques de tamaño 𝐑𝐁 tiene 𝐫𝐁 flias no nulas. Hay 𝐫𝐀 filas no nulas de dichos bloques.
Usando esto y la estructura de la matriz triangular superior de 𝐑𝐀 ⊗ 𝐑𝐁, se concluye que
𝐫𝐚𝐦𝐤(𝐑𝐀 ⊗ 𝐑𝐁) = 𝐫𝐀 ∗ 𝐫𝐁 = 𝐫𝐚𝐧𝐤(𝐑𝐀) ∗ 𝐫𝐚𝐧𝐤(𝐑𝐁) = 𝐫𝐚𝐧𝐤(𝐀) ∗ 𝐫𝐚𝐧𝐤(𝐁) , por tanto esto
concluye la prueba.
1.3. Teorema 3
Dado A una matriz simétrica e idempotente mxm de rango r y B una matriz simétrica e
idempotente nxn de rango s. Entonces 𝐀⨂𝐁 es una matriz simétrica e idempotente de rango
rs.
Prueba.- )
Si A es una matriz simétrica e idempotente de rango r, entonces por definición podemos
deducir lo siguiente:
𝐫𝐚𝐧𝐤(𝐀) = 𝐓𝐫𝐚𝐳𝐚(𝐀) = 𝐫
De igual forma para B, 𝐫𝐚𝐧𝐤(𝐁) = 𝐓𝐫𝐚𝐳𝐚(𝐁) = 𝐬
Además se sabe que: 𝐫𝐚𝐧𝐤(𝐀 ⊗ 𝐁) = 𝐫𝐚𝐧𝐤(𝐀) ∗ 𝐫𝐚𝐧𝐤(𝐁) = 𝐫 ∗ 𝐬
(𝐀 ⊗ 𝐁)′ = 𝐀′ ⊗ 𝐁′
𝐀′ ⊗ 𝐁′ = 𝐀 ⊗ 𝐁, es simétrica
(𝐀 ⊗ 𝐁)𝟐 = 𝐀𝟐 ⊗ 𝐁𝟐
𝐀𝟐 ⊗ 𝐁𝟐 = 𝐀 ⊗ 𝐁, Es idempotente
Por tanto se concluye que 𝐀 ⊗ 𝐁 es una matriz idempotente y simétrica de rango rs, esto
concluye la prueba.

2. Propiedad 2 de la matriz de helmert
MATRIZ DE HELMERT n-dimensional
𝑃𝑛𝑥𝑛 =
[ 1
√𝑛⁄ 1
√2⁄ 1
√6⁄ … 1
√𝑛(𝑛 − 1)⁄
1√𝑛
⁄ −1√2
⁄ 1√6
⁄ … 1√𝑛(𝑛 − 1)⁄
1√𝑛
⁄ 0 −2√6
⁄ … 1√𝑛(𝑛 − 1)⁄
1√𝑛
⁄ 0 0 … 1√𝑛(𝑛 − 1)⁄
⋮ ⋮ ⋮ ⋱ ⋮1
√𝑛⁄ 0 0 … −√(𝑛 − 1)/𝑛
]
Se particiona la matriz de helmert 𝑃𝑛𝑥𝑛 en n columnas siendo 𝑃 = (𝑝1 𝑝2 𝑝3 ⋯ 𝑝𝑛),
donde 𝑝𝑖 son las columnas de la matriz 𝑃𝑛𝑥𝑛 para cada i=1,…, n.
𝑝1 = (1 √12 + 12 + ⋯+ 12⁄ ) (1 1 1 ⋯ 1)′ = (1 √𝑛⁄ )1𝑛
𝑝2 = (1 √12 + (−1)2⁄ ) (1 −1 0 ⋯ 0)′
𝑝3 = (1 √12 + 12 + (−2)2⁄ ) (1 1 −2 0 ⋯ 0)′
⁞
𝑝𝑛 = (1 √12 + 12 + ⋯+ (−(𝑛 − 1))2⁄ ) (1 1 ⋯ 1 −(𝑛 − 1))′
La matriz de helmert es una matriz ortogonal nxn por ello presenta las siguientes propiedades:
1. 𝑃𝑃’ = 𝑃’𝑃 = 𝐼𝑛
2. Las columnas de la matriz verifican lo siguiente:
𝑝𝑖′𝑝𝑖 = 1, para todo i=1,2,…,n
𝑝𝑖′𝑝𝑗 = 0, para todo i ≠ j
Partición de la matriz de helmert
Se particiona la matriz de helmert en 𝑃𝑛𝑥𝑛 = [𝑃1⋮𝑃𝑛]

𝑃1 =
[ 1
√𝑛⁄
1√𝑛
⁄
1√𝑛
⁄
1√𝑛
⁄
⋮1
√𝑛⁄ ]
𝑃𝑛 =
[
1√2
⁄ 1√6
⁄ … 1√𝑛(𝑛 − 1)⁄
−1√2
⁄ 1√6
⁄ … 1√𝑛(𝑛 − 1)⁄
0 −2√6
⁄ … 1√𝑛(𝑛 − 1)⁄
0 0 … 1√𝑛(𝑛 − 1)⁄
⋮ ⋮ ⋱ ⋮0 0 … −√(𝑛 − 1)/𝑛]
Propiedades de la matriz helmert:
2.1. 𝑷𝟏𝑷𝟏′ =
𝑱𝒏𝒏⁄
Prueba:
𝑃1𝑃1′ = (
1𝑛
√𝑛) (
1𝑛
√𝑛)′
=1𝑛
√𝑛
1𝑛
√𝑛
′
∴ 𝑃1𝑃1′ =
𝐽𝑛𝑛
2.2. 𝑷𝟏′ 𝑷𝟏 = 𝟏
Prueba:
𝑃1′𝑃1 = (
1𝑛
√𝑛)′
(1𝑛
√𝑛) =
1𝑛
√𝑛
′ 1𝑛
√𝑛
∴ 𝑃1′𝑃1 = 1
2.3. 𝑷𝟏′ 𝑷𝒏 = 𝟎𝟏𝐱(𝐧−𝟏)
Prueba:

𝑃1′𝑃𝑛 = (
1
√𝑛
1
√𝑛
1
√𝑛⋯
1
√𝑛)
[
1√2
⁄ 1√6
⁄ … 1√𝑛(𝑛 − 1)⁄
−1√2
⁄ 1√6
⁄ … 1√𝑛(𝑛 − 1)⁄
0 −2√6
⁄ … 1√𝑛(𝑛 − 1)⁄
0 0 … 1√𝑛(𝑛 − 1)⁄
⋮ ⋮ ⋱ ⋮0 0 … −√(𝑛 − 1)/𝑛]
𝑷𝟏′ 𝑷𝒏 = (
𝟏
√𝟐𝒏−
𝟏
√𝟐𝒏
𝟏
√𝟔𝒏+
𝟏
√𝟔𝒏−
𝟏
√𝟔𝒏⋯ (
𝟏
√𝒏(𝒏 − 𝟏)+
𝟏
√𝒏(𝒏 − 𝟏)+ ⋯+
𝟏 − 𝒏
√𝒏(𝒏 − 𝟏))
𝟏
√𝒏)
𝑷𝟏′ 𝑷𝒏 = (𝟎 𝟎 𝟎 ⋯ 𝟎)𝟏𝒙(𝒏−𝟏)
∴ 𝑷𝟏′ 𝑷𝒏 = 𝟎𝟏𝒙(𝒏−𝟏)
Otra forma seria mediante las propiedades que tiene por ser 𝑷𝒏𝒙𝒏 ortogonal
Tenemos la matriz helmert particionada 𝑃 = (𝑝1 𝑝2 𝑝3 ⋯ 𝑝𝑛), donde:
𝑃1 = 𝑝1
𝑃𝑛 = (𝑝2 𝑝3 𝑝4 ⋯ 𝑝𝑛)
Ahora tenemos
𝑃1′𝑃𝑛 = 𝑝1
′ (𝑝2 𝑝3 𝑝4 ⋯ 𝑝𝑛)
𝑃1′𝑃𝑛 = (𝑝1
′𝑝2 𝑝1′𝑝3 𝑝1
′𝑝4 ⋯ 𝑝1′𝑝𝑛)
Como 𝑝𝑖′𝑝𝑗 = 0, para todo i ≠ j
𝑃1′𝑃𝑛 = (0 0 0 ⋯ 0) = 𝟎𝟏𝐱(𝐧−𝟏)
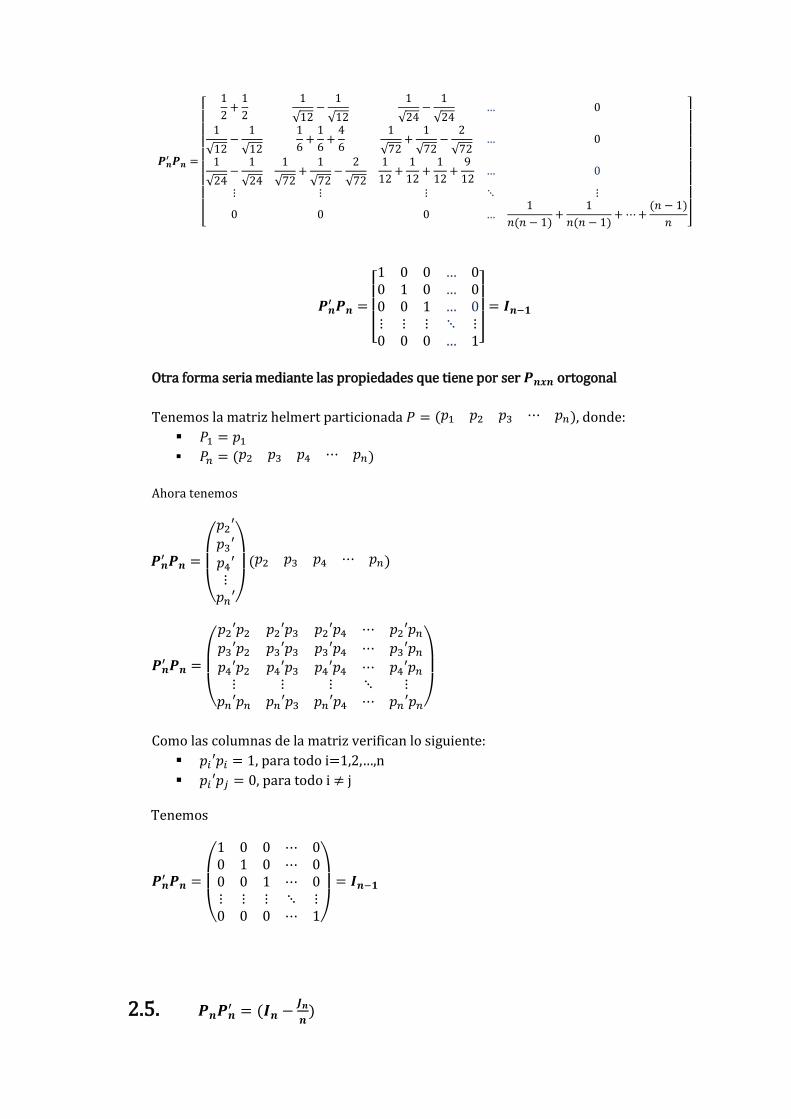
2.4. 𝑷𝒏′ 𝑷𝒏 = 𝑰𝒏−𝟏
𝑷𝒏′ 𝑷𝒏 =
[
1
√2
−1
√20 0 … 0
1
√6
1
√6
−2
√60 … 0
1
√12
1
√12
1
√12
−3
√12… 0
⋮ ⋮ ⋮ ⋮ ⋱ ⋮
1
√𝑛(𝑛 − 1)
1
√𝑛(𝑛 − 1)
1
√𝑛(𝑛 − 1)
1
√𝑛(𝑛 − 1)… −√
(𝑛 − 1)
𝑛 ]
[
1
√2
1
√6
1
√12…
1
√𝑛(𝑛 − 1)
−1
√2
1
√6
1
√12…
1
√𝑛(𝑛 − 1)
0−2
√6
1
√12…
1
√𝑛(𝑛 − 1)
0 0−3
√12…
1
√𝑛(𝑛 − 1)
⋮ ⋮ ⋮ ⋱ ⋮
0 0 0 … −√(𝑛 − 1)
𝑛 ]
𝑷𝒏′ 𝑷𝒏 =
[
1
2+
1
2
1
√12−
1
√12
1
√24−
1
√24… 0
1
√12−
1
√12
1
6+
1
6+
4
6
1
√72+
1
√72−
2
√72… 0
1
√24−
1
√24
1
√72+
1
√72−
2
√72
1
12+
1
12+
1
12+
9
12… 0
⋮ ⋮ ⋮ ⋱ ⋮
0 0 0 …1
𝑛(𝑛 − 1)+
1
𝑛(𝑛 − 1)+ ⋯+
(𝑛 − 1)
𝑛 ]
𝑷𝒏′ 𝑷𝒏 =
[ 1 0 0 … 00 1 0 … 00 0 1 … 0⋮ ⋮ ⋮ ⋱ ⋮0 0 0 … 1]
= 𝑰𝒏−𝟏
Otra forma seria mediante las propiedades que tiene por ser 𝑷𝒏𝒙𝒏 ortogonal
Tenemos la matriz helmert particionada 𝑃 = (𝑝1 𝑝2 𝑝3 ⋯ 𝑝𝑛), donde:
𝑃1 = 𝑝1
𝑃𝑛 = (𝑝2 𝑝3 𝑝4 ⋯ 𝑝𝑛)
Ahora tenemos
𝑷𝒏′ 𝑷𝒏 =
(
𝑝2′
𝑝3′
𝑝4′⋮
𝑝𝑛′)
(𝑝2 𝑝3 𝑝4 ⋯ 𝑝𝑛)
𝑷𝒏′ 𝑷𝒏 =
(
𝑝2′𝑝2 𝑝2′𝑝3 𝑝2′𝑝4 ⋯ 𝑝2′𝑝𝑛
𝑝3′𝑝2 𝑝3′𝑝3 𝑝3′𝑝4 ⋯ 𝑝3′𝑝𝑛
𝑝4′𝑝2 𝑝4′𝑝3 𝑝4′𝑝4 ⋯ 𝑝4′𝑝𝑛
⋮ ⋮ ⋮ ⋱ ⋮𝑝𝑛′𝑝𝑛 𝑝𝑛′𝑝3 𝑝𝑛′𝑝4 ⋯ 𝑝𝑛′𝑝𝑛)
Como las columnas de la matriz verifican lo siguiente:
𝑝𝑖′𝑝𝑖 = 1, para todo i=1,2,…,n
𝑝𝑖′𝑝𝑗 = 0, para todo i ≠ j
Tenemos
𝑷𝒏′ 𝑷𝒏 =
(
1 0 0 ⋯ 00 1 0 ⋯ 00 0 1 ⋯ 0⋮ ⋮ ⋮ ⋱ ⋮0 0 0 ⋯ 1)
= 𝑰𝒏−𝟏
2.5. 𝑷𝒏𝑷𝒏′ = (𝑰𝒏 −
𝑱𝒏
𝒏)

Prueba
𝑷𝒏𝑷𝒏′ =
[
1
√2
1
√6
1
√12…
1
√𝑛(𝑛 − 1)
−1
√2
1
√6
1
√12…
1
√𝑛(𝑛 − 1)
0−2
√6
1
√12…
1
√𝑛(𝑛 − 1)
0 0−3
√12…
1
√𝑛(𝑛 − 1)
⋮ ⋮ ⋮ ⋱ ⋮
0 0 0 … −√(𝑛 − 1)
𝑛 ]
[
1
√2
−1
√20 0 … 0
1
√6
1
√6
−2
√60 … 0
1
√12
1
√12
1
√12
−3
√12… 0
⋮ ⋮ ⋮ ⋮ ⋱ ⋮
1
√𝑛(𝑛 − 1)
1
√𝑛(𝑛 − 1)
1
√𝑛(𝑛 − 1)
1
√𝑛(𝑛 − 1)… −√
(𝑛 − 1)
𝑛 ]
𝑷𝒏𝑷𝒏′ =
[ 1 −
1
𝑛−1 + 1 −
1
𝑛−1 + 1 −
1
𝑛… −1 + 1 −
1
𝑛
−1 + 1 −1
𝑛1 −
1
𝑛−1 + 1 −
1
𝑛… −1 + 1 −
1
𝑛
−1 + 1 −1
𝑛−1 + 1 −
1
𝑛1 −
1
𝑛… −1 + 1 −
1
𝑛⋮ ⋮ ⋮ ⋱ ⋮
−1 + 1 −1
𝑛−1 + 1 −
1
𝑛−1 + 1 −
1
𝑛… 1 −
1
𝑛 ]
𝑷𝒏𝑷𝒏′ =
[ 1 −
1
𝑛−
1
𝑛−
1
𝑛… −
1
𝑛
−1
𝑛1 −
1
𝑛−
1
𝑛… −
1
𝑛
−1
𝑛−
1
𝑛1 −
1
𝑛… −
1
𝑛⋮ ⋮ ⋮ ⋱ ⋮
−1
𝑛−
1
𝑛−
1
𝑛… 1 −
1
𝑛]
𝑷𝒏𝑷𝒏′ =
[ 1 0 0 … 00 1 0 … 00 0 1 … 0⋮ ⋮ ⋮ ⋱ ⋮0 0 0 … 1]
−
[ −
1
𝑛−
1
𝑛−
1
𝑛… −
1
𝑛
−1
𝑛−
1
𝑛−
1
𝑛… −
1
𝑛
−1
𝑛−
1
𝑛−
1
𝑛… −
1
𝑛⋮ ⋮ ⋮ ⋱ ⋮
−1
𝑛−
1
𝑛−
1
𝑛… −
1
𝑛]
∴ 𝑷𝒏𝑷𝒏′ = (𝑰𝒏 −
𝑱𝒏
𝒏)
3. Lema de BHAT (1962)

Sea k y n enteros fijos positivos tal que 𝟏 ≤ 𝐤 ≤ 𝐧. Suponga que 𝐈𝐧 = ∑𝐀𝐢, donde cada 𝐀𝐢 es
una matriz simétrica nxn de rango 𝐧𝐢 con ∑𝐧𝐢 = 𝐧. Si la variable aleatoria 𝐲𝐧𝐱𝟏 se distribuye
como 𝐍(𝛍,∑) y la suma de cuadrados 𝐒𝐢𝟐 = 𝐲′𝐀𝐢𝐲 para toda 𝐢 = 𝟏,… . , 𝐤, entonces:
a) 𝐒𝐢𝟐 ~ 𝐜𝐢𝐱𝐧𝐢
𝟐 (𝛌𝐢 =𝛍′𝐀𝐢𝛍
𝟐𝐜𝐢 ) ; y
b) { 𝐒𝐢𝟐, 𝐢 = 𝟏,… . , 𝐤} son mutuamente independientes.
Si y solo si ∑ = ∑ 𝐜𝐢𝐤𝐢=𝟏 𝐀𝐢 donde 𝐜𝐢 > 𝟎 .
Prueba.- )
Si asumimos que la forma cuadrática 𝐒𝐢𝟐 satisface (a) y (b) dado por el Lema. Y definimos los
siguientes teoremas, que nos servirán para el desarrollo de la prueba:
Teorema (1)
Sea el vector aleatorio 𝐲𝐧𝐱𝟏 ∼ 𝐍𝐧(𝛍, ∑), donde ∑ es una matriz definida positiva nxn de rango
n. Entonces 𝐲′𝐀𝐲 ~ 𝐱𝐩𝟐(𝛌 =
𝛍′𝐀𝛍
𝟐 ) si y solo si alguna de las condiciones es satisfecha: (1) 𝐀∑ (o
∑𝐀) es una matriz idempotente de rango p o (2) 𝐀∑𝐀 = 𝐀 y A tiene rango p.
Teorema (2)
Sea A y B matrices constantes de orden nxn. Además sea el vector aleatorio 𝐲𝐧𝐱𝟏 ∼ 𝐍𝐧(𝛍, ∑),
Las formas cuadráticas 𝐲′𝐀𝐲 y 𝐲′𝐁𝐲 son independientes si y solo si 𝐀∑𝐁 = 𝟎 (o 𝐀∑𝐁 = 𝟎).
Teorema (3)
Sea 𝐀𝟏, … . , 𝐀𝐦 matrices simétricas nxn, donde 𝐑𝐚𝐧𝐤(𝐀) = 𝐧𝐬 para 𝐬 = 𝟏,… . ,𝐦 y ∑ 𝐀𝐢𝐦𝐢=𝟏 =
𝐈𝐧 . Si ∑ 𝐧𝐬𝐦𝐢=𝟏 = 𝐧, entonces (i) 𝐀𝐫𝐀𝐬 = 𝟎𝐧𝐱𝐧 para 𝐫 ≠ 𝐬, 𝐫, 𝐬 = 𝟏,… . ,𝐦 (ii) 𝐀𝐬 = 𝐀𝐬
𝟐 para
𝐬 = 𝟏,… . ,𝐦,
Entonces por el teorema (1) y (2), (i) las matrices (𝟏/𝐜𝐢) 𝐀𝐢∑ son idempotentes para 𝐢 =
𝟏,… . , 𝐤 y (ii) 𝐀𝐢∑𝐀𝐣 = 𝟎𝐧𝐱𝐧 para 𝐢 ≠ 𝐣, 𝐢, 𝐣 = 𝟏, … . , 𝐤
Sin embargo por el teorema (3), 𝐀𝐢 = 𝐀𝐢𝟐 y 𝐀𝐢𝐀𝐣 = 𝟎𝐧𝐱𝐧 para 𝐢 ≠ 𝐣, 𝐢, 𝐣 = 𝟏,… . , 𝐤, Pero (i) y
(ii) implica que ∑ (𝟏/𝐜𝐢)𝐤𝐢=𝟏 𝐀𝐢∑ es idempotente de rango n y esta es igual a 𝐈𝐧 .
Por ello, ∑ = (∑ (𝟏/𝐜𝐢)𝐤𝐢=𝟏 𝐀𝐢∑) −𝟏 = ∑ 𝐜𝐢
𝐤𝐢=𝟏 𝐀𝐢 , Contrariamente, asumimos ∑ = ∑ 𝐜𝐢
𝐤𝐢=𝟏 𝐀𝐢 .
Pero 𝐀𝐢 = 𝐀𝐢𝟐 y 𝐀𝐢𝐀𝐣 = 𝟎𝐧𝐱𝐧 así que (i) y (ii) están sustentados. Por lo tanto, por los teoremas
definidos anteriormente, (a) y (b) están sustentados. Esto concluye la prueba.
4. Teorema diapositiva 14
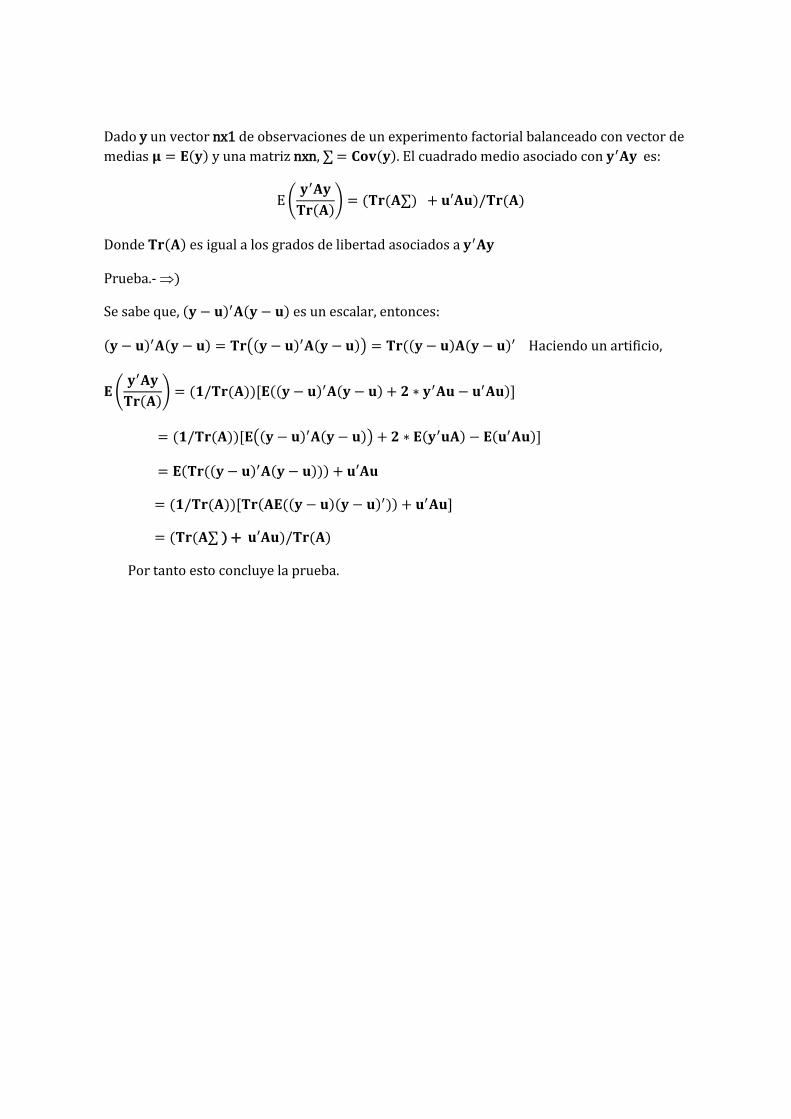
Dado y un vector nx1 de observaciones de un experimento factorial balanceado con vector de
medias 𝛍 = 𝐄(𝐲) y una matriz nxn, ∑ = 𝐂𝐨𝐯(𝐲). El cuadrado medio asociado con 𝐲′𝐀𝐲 es:
E(𝐲′𝐀𝐲
𝐓𝐫(𝐀)) = (𝐓𝐫(𝐀∑) + 𝐮′𝐀𝐮)/𝐓𝐫(𝐀)
Donde 𝐓𝐫(𝐀) es igual a los grados de libertad asociados a 𝐲′𝐀𝐲
Prueba.- )
Se sabe que, (𝐲 − 𝐮)′𝐀(𝐲 − 𝐮) es un escalar, entonces:
(𝐲 − 𝐮)′𝐀(𝐲 − 𝐮) = 𝐓𝐫((𝐲 − 𝐮)′𝐀(𝐲 − 𝐮)) = 𝐓𝐫((𝐲 − 𝐮)𝐀(𝐲 − 𝐮)′ Haciendo un artificio,
𝐄(𝐲′𝐀𝐲
𝐓𝐫(𝐀)) = (𝟏/𝐓𝐫(𝐀))[𝐄((𝐲 − 𝐮)′𝐀(𝐲 − 𝐮) + 𝟐 ∗ 𝐲′𝐀𝐮 − 𝐮′𝐀𝐮)]
= (𝟏/𝐓𝐫(𝐀))[𝐄((𝐲 − 𝐮)′𝐀(𝐲 − 𝐮)) + 𝟐 ∗ 𝐄(𝐲′𝐮𝐀) − 𝐄(𝐮′𝐀𝐮)]
= 𝐄(𝐓𝐫((𝐲 − 𝐮)′𝐀(𝐲 − 𝐮))) + 𝐮′𝐀𝐮
= (𝟏/𝐓𝐫(𝐀))[𝐓𝐫(𝐀𝐄((𝐲 − 𝐮)(𝐲 − 𝐮)′)) + 𝐮′𝐀𝐮]
= (𝐓𝐫(𝐀∑ ) + 𝐮′𝐀𝐮)/𝐓𝐫(𝐀)
Por tanto esto concluye la prueba.

5. La tabla ANVA del modelo de dos factores con interaccion y efectos aleatorios
MODELO DE DOS FACTORES CON ITERACIÓN Y EFECTOS ALEATORIOS
𝐹𝑢𝑒𝑛𝑡𝑒 𝑑𝑒 𝑣𝑎𝑟𝑖𝑎𝑐𝑖𝑜𝑛 𝐺𝑟𝑎𝑑𝑜𝑠 𝑑𝑒 𝑙𝑖𝑏𝑒𝑟𝑡𝑎𝑑 𝑆𝑢𝑚𝑎 𝑑𝑒 𝑐𝑢𝑎𝑑𝑟𝑎𝑑𝑜𝑠 𝐹𝑜𝑟𝑚𝑎 𝑚𝑎𝑡𝑟𝑖𝑐𝑖𝑎𝑙
𝑀𝑒𝑑𝑖𝑎 1 ∑∑ 𝑌••
2𝑡
𝑗=1
𝑠
𝑖=1
𝑌′𝐴1𝑌
𝐹𝑎𝑐𝑡𝑜𝑟 𝑆 𝑠 − 1 ∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
𝑌′𝐴2𝑌
𝐹𝑎𝑐𝑡𝑜𝑟 𝑇 𝑡 − 1 ∑∑(𝑌•𝑗 − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
𝑌′𝐴3𝑌
𝐼𝑛𝑡𝑒𝑟𝑎𝑐𝑐𝑖𝑜𝑛 𝑆𝑇 (𝑠 − 1)(𝑡 − 1) ∑∑(𝑌𝑖𝑗 − 𝑌𝑖• − 𝑌•𝑗 + 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
𝑌′𝐴4𝑌
𝑇𝑜𝑡𝑎𝑙 𝑠𝑡 ∑∑𝑌𝑖𝑗2
𝑡
𝑗=1
𝑠
𝑖=1
𝑌′𝐴5𝑌
𝒚𝒊𝒋 = 𝜶 + 𝝉𝒊 + 𝜷𝒋 + (𝝉𝜷)𝒊𝒋 + 𝜺𝒊𝒋
Donde: 𝛼: Efecto medio general 𝜏𝑖: 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑎 𝑐𝑜𝑛 𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑐𝑖𝑜𝑛 𝑁(0, 𝜎2
𝜏) 𝛽𝑗: 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑎 𝑐𝑜𝑛 𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑐𝑖𝑜𝑛 𝑁(0, 𝜎2
𝛽)
(𝜏𝛽)𝑖𝑗: 𝑉𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑎 𝑐𝑜𝑛 𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑐𝑖𝑜𝑛 𝑁(0, 𝜎2𝜏𝛽)
𝜀𝑖𝑗𝑘: 𝐸𝑟𝑟𝑜𝑟 𝑎𝑙𝑒𝑎𝑡𝑜𝑟𝑖𝑜 𝑐𝑜𝑛 𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑐𝑖𝑜𝑛 𝑁(0, 𝜎2)
Al vectorizar las observaciones de la matriz de datos obtenemos el siguiente vector tr x 1:
𝑌𝑠𝑡 𝑥 1 =
[ 𝑦
11
𝑦12
⋮
𝑦1𝑡
⋯ ⋯
𝑦21
𝑦22
⋮
𝑦2𝑡
⋯ ⋯
⋮
⋮
⋮
⋯ ⋯
𝑦𝑠1
𝑦𝑠2
⋮
𝑦𝑠𝑡 ]
𝑠𝑡 𝑥 1
i= 1,2,…,s j= 1,2,…,t
De modo que:
𝑌~𝑁𝑠𝑡(𝜇, Σ)
Dónde:
𝜇 = 𝛼 (1𝑠⨂1𝑡)
Σ = 𝜎2𝑠 (𝐼𝑡 ⊗ 𝐽𝑡) + 𝜎2
𝑡 ( 𝐽𝑠 ⊗ 𝐼𝑡) + 𝜎2𝑠𝑡 ( 𝐼𝑠 ⊗ 𝐼𝑡)

5.1. Formas cuadráticas
Estudio de los componentes:
a. Estudio del componente 𝑌••
𝑌•• =1
𝑠𝑡(1 1 1 ⋯ 1)1 𝑥 𝑠𝑡
[ 𝑦
11
𝑦12
⋮
𝑦1𝑡
⋯ ⋯
⋮
⋮
⋮
⋯ ⋯
𝑦𝑠1
𝑦𝑠2
⋮
𝑦𝑠𝑡 ]
𝑠𝑡 𝑥 1
𝑌•• =1
𝑠𝑡 1′𝑠𝑡 𝑥 1 𝑌𝑡𝑟 𝑥 1 =
1
𝑠𝑡(1𝑠⨂1𝑡)
′ 𝑌
b. Estudio del componente 𝑌𝑖•
𝑌𝑖• =1
𝑠
[ (1 ⋯ 1)1𝑥𝑡 (0 ⋯ 0)1𝑥𝑡 (0 ⋯ 0)1𝑥𝑡 … (0 ⋯ 0)1𝑥 𝑡
(0 ⋯ 0)1𝑥𝑡 (1 ⋯ 1)1𝑥𝑡 (0 ⋯ 0)1𝑥𝑡 … (0 ⋯ 0)1𝑥 𝑡
(0 ⋯ 0)1𝑥𝑡 (0 ⋯ 0)1𝑥𝑡 (1 ⋯ 1)1𝑥𝑡 … (0 ⋯ 0)1𝑥 𝑡
⋮ ⋮ ⋮ ⋱ ⋮
(0 ⋯ 0)1𝑥𝑡 (0 ⋯ 0)1𝑥𝑡 (0 ⋯ 0)1𝑥𝑡 … (1 ⋯ 1)1𝑥 𝑡 ]
𝑡 𝑥 𝑠𝑡
[ 𝑦11
𝑦12
⋮𝑦1𝑡
⋯⋯𝑦21
𝑦22
⋮𝑦2𝑡
⋯⋯⋮⋮⋮
⋯⋯𝑦𝑠1
𝑦𝑠2
⋮𝑦𝑠𝑡 ]
𝑠𝑡 𝑥 1
𝑌𝑖• =1
𝑡(𝐼𝑠⨂1′
𝑡) 𝑌𝑠𝑡 𝑥 1 =
[ 𝑌1•
𝑌2•
𝑌3•
𝑌4•
⋮𝑌𝑠•]

c. Estudio del componente 𝑌•𝑗
𝑌•𝑗 =1
𝑠[ (
1 0 … 00 1 … 0⋮ ⋮ ⋱ ⋮0 0 … 1
)
𝑡 𝑥 𝑡
(
1 0 … 00 1 … 0⋮ ⋮ ⋱ ⋮0 0 … 1
)
𝑡 𝑥 𝑡
… (
1 0 … 00 1 … 0⋮ ⋮ ⋱ ⋮0 0 … 1
)
𝑡 𝑥 𝑡
]
𝑡 𝑥 𝑠𝑡
[ 𝑦11
𝑦12
⋮𝑦1𝑡
⋯ ⋯𝑦21
𝑦22
⋮𝑦2𝑡
⋯ ⋯⋮⋮⋮
⋯ ⋯𝑦𝑠1
𝑦𝑠2
⋮𝑦𝑠𝑡 ]
𝑠𝑡 𝑥 1
𝑌•𝑗 =1
𝑠(1′𝑠⨂𝐼𝑡) 𝑌𝑠𝑡 𝑥 1 =
[ 𝑌•1
𝑌•2
𝑌•3
𝑌•4
⋮𝑌•5]
d. Estudio del componente 𝑌𝑖𝑗2
𝑌𝑖𝑗2 = [𝑦11 𝑦12 ⋯ 𝑦1𝑡 ⁞ ⋯ ⋯ ⋯ ⁞ 𝑦𝑠1 𝑦𝑠2 ⋯ 𝑦𝑠𝑡]1 𝑥 𝑠𝑡
[ 𝑦11
𝑦12
⋮𝑦1𝑡
⋯⋯𝑦21
𝑦22
⋮𝑦2𝑡
⋯⋯⋮⋮⋮
⋯⋯𝑦𝑠1
𝑦𝑠2
⋮𝑦𝑠𝑡 ]
𝑠𝑡 𝑥 1
𝑌𝑖𝑗2 = 𝑌′𝑌

Suma de cuadrados
5.1.1. Evaluación de la suma de cuadrados de la media, ∑ ∑ 𝒀••
𝟐𝒓𝒋=𝟏
𝒕𝒊=𝟏 = 𝒀′𝑨𝟏𝒀
∑∑ 𝑌••
2𝑟
𝑗=1
𝑡
𝑖=1
= 𝑠𝑡 𝑌••
2= 𝑠𝑡 𝑌
′
•• 𝑌••
∑∑ 𝑌••
2𝑟
𝑗=1
𝑡
𝑖=1
= 𝑠𝑡 [𝑌′1
𝑠𝑡(1𝑠⨂1𝑡)
1
𝑠𝑡(1𝑠⨂1𝑡)
′ 𝑌]
∑∑ 𝑌••
2𝑟
𝑗=1
𝑡
𝑖=1
=1
𝑠𝑡 [𝑌′(1𝑠⨂1𝑡) (1
′𝑠⨂1′
𝑡) 𝑌] =1
𝑠𝑡 [𝑌′ (1𝑠1
′𝑠⨂1𝑡 1
′𝑡)𝑌]
∑∑ 𝑌••
2𝑟
𝑗=1
𝑡
𝑖=1
=1
𝑠𝑡 [𝑌′(𝐽𝑠⨂ 𝐽𝑡 ) 𝑌] = 𝑌′(
𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 )𝑌
∴ ∑∑ 𝑌••
2𝑟
𝑗=1
𝑡
𝑖=1
= 𝑌′(𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 )𝑌 = 𝑌′𝐴1𝑌
5.1.2. Evaluación de la suma de cuadrados del FACTOR S, ∑ ∑ (𝒀𝒊• − 𝒀••)𝟐𝒓
𝒋=𝟏 = 𝑌′𝐴2𝑌𝒕𝒊=𝟏
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= ∑ ∑(𝑌𝑖•
2+ 𝑌••
2− 2 𝑌𝑖• 𝑌••)
𝑡
𝑗=1
𝑠
𝑖=1
= ∑∑𝑌𝑖•
2𝑡
𝑗=1
𝑠
𝑖=1
+ ∑∑ 𝑌••
2𝑡
𝑗=1
𝑠
𝑖=1
− 2∑ ∑ 𝑌𝑖• 𝑌••
𝑡
𝑗=1
𝑠
𝑖=1
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= ∑ 𝑡 𝑌𝑖•
2𝑠
𝑖=1
+ ∑𝑡 𝑌••
2𝑠
𝑖=1
− 2∑𝑡 𝑌𝑖• 𝑌••
𝑠
𝑖=1
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑡 ∑ 𝑌𝑖•
2𝑠
𝑖=1
+ 𝑠𝑡𝑌••
2− 2𝑡𝑌•• ∑ 𝑌𝑖•
𝑠
𝑖=1
= 𝑡 ∑𝑌𝑖•
2𝑠
𝑖=1
+ 𝑠𝑡𝑌••
2− 2𝑠𝑡𝑌••
1
𝑠∑ 𝑌𝑖•
𝑠
𝑖=1
𝐸𝑙 𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜 𝑑𝑒 𝑡𝑜𝑑𝑜𝑠 𝑙𝑜𝑠 𝑌𝑖• 𝑒𝑠 𝑒𝑞𝑢𝑖𝑣𝑎𝑙𝑒𝑛𝑡𝑒 𝑎: 1
𝑠∑ 𝑌𝑖•
𝑠
𝑖=1
= 𝑌••
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑡 ∑ 𝑌𝑖•
2𝑠
𝑖=1
+ 𝑠𝑡𝑌••
2− 2𝑠𝑡𝑌•• 𝑌•• = 𝑡 ∑ 𝑌𝑖•
2𝑠
𝑖=1
+ 𝑠𝑡𝑌••
2− 2𝑠𝑡 𝑌••
2
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑡 ∑ 𝑌𝑖•
2𝑠
𝑖=1
− 𝑠𝑡𝑌••
2= 𝑡
1
𝑡𝑌′ (𝐼𝑠⨂1′
𝑡)′ 1
𝑡(𝐼𝑠⨂1′
𝑡)𝑌 − 𝑌′(𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) 𝑌

∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
=1
𝑡 𝑌′(𝐼′𝑠⨂1𝑡) (𝐼𝑠⨂1′
𝑡)𝑌 − 𝑌′(𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) 𝑌
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
=1
𝑡 𝑌′(𝐼𝑠⨂1𝑡 1
′𝑡)𝑌 − 𝑌′ (
𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) 𝑌
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑌′ (𝐼𝑠⨂ 𝐽𝑡𝑡) 𝑌 − 𝑌′ (
𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) 𝑌 = 𝑌′ [(𝐼𝑠 −
𝐽𝑠𝑠)⨂
𝐽𝑡𝑡] 𝑌
∴ ∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑌′ [(𝐼𝑠 −𝐽𝑠𝑠)⨂
𝐽𝑡𝑡] 𝑌
5.1.3. Evaluación de la suma de cuadrados del FACTOR T, ∑ ∑ (𝒀•𝒋 − 𝒀••)𝟐𝒕
𝒋=𝟏𝒔𝒊=𝟏 = 𝒀′𝑨𝟑𝒀
∑∑(𝑌•𝑗 − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= ∑ ∑(𝑌•𝑗
2+ 𝑌••
2− 2 𝑌•𝑗 𝑌••)
𝑡
𝑗=1
𝑠
𝑖=1
= ∑ ∑𝑌•𝑗
2𝑡
𝑗=1
𝑠
𝑖=1
+ ∑ ∑𝑌••
2𝑡
𝑗=1
𝑠
𝑖=1
− 2∑ ∑ 𝑌•𝑗 𝑌••
𝑡
𝑗=1
𝑠
𝑖=1
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= ∑ 𝑠 𝑌•𝑗
2𝑡
𝑗=1
+ ∑𝑡 𝑌••
2𝑡
𝑗=1
− 2∑ 𝑠 𝑌•𝑗 𝑌••
𝑡
𝑗=1
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑠 ∑𝑌•𝑗
2𝑡
𝑗=1
+ 𝑠𝑡𝑌••
2− 2𝑠𝑌•• ∑ 𝑌•𝑗
𝑡
𝑗=1
= 𝑠 ∑𝑌•𝑗
2𝑡
𝑗=1
+ 𝑠𝑡𝑌••
2− 2𝑠𝑡𝑌••
1
𝑡∑ 𝑌•𝑗
𝑡
𝑖=1
𝐸𝑙 𝑝𝑟𝑜𝑚𝑒𝑑𝑖𝑜 𝑑𝑒 𝑡𝑜𝑑𝑜𝑠 𝑙𝑜𝑠 𝑌𝑖• 𝑒𝑠 𝑒𝑞𝑢𝑖𝑣𝑎𝑙𝑒𝑛𝑡𝑒 𝑎: 1
𝑡∑ 𝑌•𝑗
𝑡
𝑗=1
= 𝑌••
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑠 ∑𝑌•𝑗
2𝑡
𝑗=1
+ 𝑠𝑡𝑌••
2− 2𝑠𝑡𝑌•• 𝑌•• = 𝑠 ∑𝑌•𝑗
2𝑡
𝑗=1
+ 𝑠𝑡𝑌••
2− 2𝑠𝑡 𝑌••
2
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑠 ∑𝑌•𝑗
2𝑡
𝑗=1
− 𝑠𝑡𝑌••
2= 𝑠
1
𝑠𝑌′(1𝑠⨂𝐼𝑡)
1
𝑠(1′𝑠⨂𝐼𝑡)𝑌 − 𝑌′ (
𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) 𝑌
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
=1
𝑠𝑌′(1𝑠⨂𝐼𝑡)(1′𝑠⨂𝐼𝑡)𝑌 − 𝑌′ (
𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) 𝑌
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
=1
𝑠𝑌′(1𝑠1′𝑠⨂𝐼𝑡)𝑌 − 𝑌′ (
𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) 𝑌
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑌′ (𝐽𝑠𝑠
⨂ 𝐼𝑡)𝑌 − 𝑌′ (𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) 𝑌 = 𝑌′ [
𝐽𝑠𝑠
⨂(𝐼𝑡 −𝐽𝑡𝑡)] 𝑌

∴ ∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑌′ [𝐽𝑠𝑠
⨂(𝐼𝑡 −𝐽𝑡𝑡)] 𝑌
5.1.4. Evaluación de la suma de cuadrados del total, ∑ ∑ 𝒀𝒊𝒋𝟐𝒕
𝒋=𝟏𝒔𝒊=𝟏 = 𝒀′𝑨𝟓𝒀
∑∑ 𝑌𝑖𝑗2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑌′𝑌 = 𝑌′𝐼𝑠𝑡 𝑥 𝑠𝑡 𝑌 = 𝑌′(𝐼𝑠⨂𝐼𝑡)𝑌
∴ ∑∑𝑌𝑖𝑗2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑌′(𝐼𝑠⨂𝐼𝑡)𝑌
5.1.5. Evaluación de la INTERACCION ST, ∑ ∑ (𝒀𝒊𝒋 − 𝒀𝒊• − 𝒀•𝒋 + 𝒀••)𝟐𝒕
𝒋=𝟏𝒔𝒊=𝟏 = 𝒀′𝑨𝟒𝒀
La suma de particiones es igual al total: 𝐴5 = 𝐴1 + 𝐴2 + 𝐴3 + 𝐴4
Entonces:
(𝐼𝑠⨂𝐼𝑡) = (𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) + [(𝐼𝑠 −
𝐽𝑠𝑠)⨂
𝐽𝑡𝑡] + [
𝐽𝑠𝑠
⨂(𝐼𝑡 −𝐽𝑡𝑡)] + 𝐴4
𝐴4 = (𝐼𝑠⨂𝐼𝑡) − (𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 ) − [(𝐼𝑠 −
𝐽𝑠𝑠)⨂
𝐽𝑡𝑡] − [
𝐽𝑠𝑠
⨂(𝐼𝑡 −𝐽𝑡𝑡)]
𝐴4 = (𝐼𝑠⨂𝐼𝑡) − (𝐼𝑠⨂ 𝐽𝑡𝑡) − [
𝐽𝑠𝑠
⨂(𝐼𝑡 −𝐽𝑡𝑡)] = [𝐼𝑠⨂(𝐼𝑡 −
𝐽𝑡𝑡)] − [
𝐽𝑠𝑠
⨂(𝐼𝑡 −𝐽𝑡𝑡)]
∴ 𝐴4 = [(𝐼𝑠 −𝐽𝑠𝑠)⨂(𝐼𝑡 −
𝐽𝑡𝑡)]
Por tanto la suma de cuadrados de la interacción es:
∑∑(𝑌𝑖𝑗 − 𝑌𝑖• − 𝑌•𝑗 + 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑌′[(𝐼𝑠 −
𝐽𝑠𝑠)⨂(𝐼𝑡 −
𝐽𝑡𝑡
)]𝑌

5.2. CUADRADOS MEDIOS
5.3.1. Cuadrado medio de la media ∑ ∑ 𝒀••
𝟐𝒓𝒋=𝟏
𝒕𝒊=𝟏 = 𝑌′𝐴1𝑌
∑∑ 𝑌••
2𝑟
𝑗=1
𝑡
𝑖=1
= 𝑌′(𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 )𝑌 = 𝑌′𝐴1𝑌
𝑬(𝑌′𝐴1𝑌) = 𝐸 [𝑌′(𝐽𝑠𝑠
⨂ 𝐽𝑡𝑡 )𝑌]
𝑬(𝑌′𝐴1𝑌) =𝑇𝑟[𝐴1Σ] + 𝜇𝐴1𝜇
𝑇𝑟(𝐴1)=
=
𝑇𝑟 [(𝐽𝑠𝑠 ⨂
𝐽𝑡𝑡 ) (𝜎2
𝑠 (𝐼𝑠 ⊗ 𝐽𝑡) + 𝜎2𝑡 ( 𝐽𝑠 ⊗ 𝐼𝑡) + 𝜎2
𝑠𝑡 ( 𝐼𝑠 ⊗ 𝐼𝑡))] + 𝛼 (1𝑠⨂1𝑡)′ (
𝐽𝑠𝑠 ⨂
𝐽𝑡𝑡 )𝛼 (1𝑠⨂1𝑡)
𝑇𝑟 (𝐽𝑠𝑠 ⨂
𝐽𝑡𝑡 )
=
𝜎2𝑠 𝑇𝑟 (
𝐽𝑠𝑠 ⊗ 𝐽𝑡) + 𝜎2
𝑡 𝑇𝑟 ( 𝐽𝑠 ⊗ 𝐽𝑡𝑡 ) + 𝜎2
𝑠𝑡 𝑇𝑟 ( 𝐽𝑠𝑠 ⨂
𝐽𝑡𝑡 ) + 𝛼 (𝑠⨂𝑡 )𝛼
𝑇𝑟 (𝐽𝑠𝑠 )𝑇𝑟 (
𝐽𝑡𝑡 )
=
𝜎2𝑠 𝑇𝑟 (
𝐽𝑠𝑠)𝑇𝑟(𝐽𝑡) + 𝜎2
𝑡 𝑇𝑟( 𝐽𝑠)𝑇𝑟 ( 𝐽𝑡𝑡 ) + 𝜎2
𝑠𝑡 𝑇𝑟 ( 𝐽𝑠𝑠)𝑇𝑟 (
𝐽𝑡𝑡 ) + 𝛼2𝑠𝑡
1
Por lo tanto el cuadrado medio de la MEDIA es:
𝑬(𝑌′𝐴1𝑌) = 𝜎2𝑠 𝑡 + 𝜎2
𝑡 𝑠 + 𝜎2𝑠𝑡 + 𝛼2𝑠𝑡
5.3.2. Cuadrado medio del FACTOR S, ∑ ∑ (𝒀𝒊• − 𝒀••)𝟐𝒓
𝒋=𝟏 = 𝑌′𝐴2𝑌𝒕𝒊=𝟏
∑∑(𝒀𝒊• − 𝒀••)𝟐
𝒓
𝒋=𝟏
𝒕
𝒊=𝟏
= 𝑌′ [(𝐼𝑠 −𝐽𝑠𝑠)⨂
𝐽𝑡𝑡]𝑌 = 𝑌′𝐴2𝑌
𝑬(𝑌′𝐴2𝑌) = 𝐸 (𝑌′[(𝐼𝑠 −
𝐽𝑠𝑠)⨂
𝐽𝑡𝑡
]𝑌)
𝑬(𝑌′𝐴2𝑌) =𝑇𝑟[𝐴2Σ] + 𝜇𝐴2𝜇
𝑇𝑟(𝐴2)=

=
𝑇𝑟 [((𝐼𝑠 −𝐽𝑠𝑠)⨂
𝐽𝑡𝑡 ) (𝜎2
𝑠 (𝐼𝑠 ⊗ 𝐽𝑡) + 𝜎2𝑡 ( 𝐽𝑠 ⊗ 𝐼𝑡) + 𝜎2
𝑠𝑡 ( 𝐼𝑠 ⊗ 𝐼𝑡))] + 𝛼 (1𝑠⨂1𝑡)′ ((𝐼𝑠 −
𝐽𝑠𝑠)⨂
𝐽𝑡𝑡 )𝛼 (1𝑠⨂1𝑡)
𝑇𝑟 ((𝐼𝑠 −𝐽𝑠𝑠 )⨂
𝐽𝑡𝑡 )
=
𝜎2𝑠 𝑇𝑟 ((𝐼𝑠 −
𝐽𝑠𝑠) ⊗ 𝐽𝑡) + 𝜎2
𝑡 𝑇𝑟 (0 ⊗ 𝐽𝑡𝑡 ) + 𝜎2
𝑠𝑡 𝑇𝑟 ((𝐼𝑠 −𝐽𝑠𝑠)⨂
𝐽𝑡𝑡 ) + 𝛼 (0⨂𝑡 )𝛼
𝑇𝑟 (𝐼𝑠 −𝐽𝑠𝑠)𝑇𝑟 (
𝐽𝑡𝑡 )
=
𝜎2𝑠 𝑇𝑟 (𝐼𝑠 −
𝐽𝑠𝑠)𝑇𝑟(𝐽𝑡) + 𝜎2
𝑠𝑡 𝑇𝑟 (𝐼𝑠 −𝐽𝑠𝑠 )𝑇𝑟 (
𝐽𝑡𝑡 )
(𝑠 − 1)
𝑬(𝑌′𝐴2𝑌) =𝜎2
𝑠 (𝑠 − 1) 𝑡 + 𝜎2𝑠𝑡 (𝑠 − 1)
(𝑠 − 1)= 𝜎2
𝑠 𝑡 + 𝜎2𝑠𝑡
Por lo tanto el cuadrado medio del FACTOR “S” es:
∴ 𝑬(𝑌′𝐴2𝑌) = 𝜎2𝑠 𝑡 + 𝜎2
𝑠𝑡
5.3.3. Cuadrado medio del FACTOR T, ∑ ∑ (𝑌•𝑗 − 𝑌••)2𝑡
𝑗=1𝑠𝑖=1 = 𝑌′𝐴3𝑌
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑌′ [𝐽𝑠𝑠
⨂(𝐼𝑡 −𝐽𝑡𝑡)] 𝑌 = 𝑌′𝐴3𝑌
𝑬(𝑌′𝐴3𝑌) = 𝐸 (𝑌′[𝐽𝑠𝑠
⨂(𝐼𝑡 −𝐽𝑡𝑡)]𝑌)
𝑬(𝑌′𝐴3𝑌) =𝑇𝑟[𝐴3Σ] + 𝜇𝐴3𝜇
𝑇𝑟(𝐴3)=
=
𝑇𝑟 [(𝐽𝑠𝑠 ⨂(𝐼𝑡 −
𝐽𝑡𝑡 ))(𝜎2
𝑠 (𝐼𝑠 ⊗ 𝐽𝑡) + 𝜎2𝑡 ( 𝐽𝑠 ⊗ 𝐼𝑡) + 𝜎2
𝑠𝑡 ( 𝐼𝑠 ⊗ 𝐼𝑡))] + 𝛼 (1𝑠⨂1𝑡)′ (
𝐽𝑠𝑠 ⨂(𝐼𝑡 −
𝐽𝑡𝑡 ))𝛼 (1𝑠⨂1𝑡)
𝑇𝑟 (𝐽𝑠𝑠 ⨂(𝐼𝑡 −
𝐽𝑡𝑡 ))
=
𝜎2𝑠 𝑇𝑟 (
𝐽𝑠𝑠 ⊗ 0) + 𝜎2
𝑡 𝑇𝑟 (𝐽𝑠 ⊗ (𝐼𝑡 −𝐽𝑡𝑡 )) + 𝜎2
𝑠𝑡 𝑇𝑟 (𝐽𝑠𝑠 ⨂(𝐼𝑡 −
𝐽𝑡𝑡 )) + 𝛼 (𝑠⨂0 )𝛼
𝑇𝑟 (𝐽𝑠𝑠 )𝑇𝑟 (𝐼𝑡 −
𝐽𝑡𝑡 )
=
𝜎2𝑡 𝑇𝑟(𝐽𝑠)𝑇𝑟 (𝐼𝑡 −
𝐽𝑡𝑡 ) + 𝜎2
𝑠𝑡 𝑇𝑟 (𝐽𝑠𝑠) 𝑇𝑟 (𝐼𝑡 −
𝐽𝑡𝑡 )
(𝑡 − 1)

𝑬(𝑌′𝐴3𝑌) =𝜎2
𝑡 𝑠 (𝑡 − 1) + 𝜎2𝑠𝑡 (𝑡 − 1)
(𝑡 − 1)= 𝜎2
𝑡 𝑠 + 𝜎2𝑠𝑡
Por lo tanto el cuadrado medio del FACTOR “T” es:
∴ 𝑬(𝑌′𝐴3𝑌) = 𝜎2𝑡 𝑠 + 𝜎2
𝑠𝑡
5.3.4. Cuadrado medio de la INTERACCION ST, ∑ ∑ (𝑌𝑖𝑗 − 𝑌𝑖• − 𝑌•𝑗 + 𝑌••)2𝑡
𝑗=1𝑠𝑖=1 = 𝑌′𝐴4𝑌
∑∑(𝑌𝑖• − 𝑌••)2
𝑡
𝑗=1
𝑠
𝑖=1
= 𝑌′ [(𝐼𝑠 −𝐽𝑠𝑠)⨂(𝐼𝑡 −
𝐽𝑡𝑡)] 𝑌 = 𝑌′𝐴4𝑌
𝑬(𝑌′𝐴4𝑌) = 𝐸 (𝑌′[(𝐼𝑠 −
𝐽𝑠𝑠)⨂(𝐼𝑡 −
𝐽𝑡𝑡
)]𝑌)
𝑬(𝑌′𝐴4𝑌) =𝑇𝑟[𝐴4Σ] + 𝜇𝐴4𝜇
𝑇𝑟(𝐴4)=
=1
𝑇𝑟 ((𝐼𝑠 −𝐽𝑠𝑠)⨂ (𝐼𝑡 −
𝐽𝑡𝑡))
{𝑇𝑟 [((𝐼𝑠 −𝐽𝑠𝑠)⨂ (𝐼𝑡 −
𝐽𝑡𝑡)) (𝜎2
𝑠 (𝐼𝑠 ⊗ 𝐽𝑡) + 𝜎2𝑡 ( 𝐽𝑠 ⊗ 𝐼𝑡)
+ 𝜎2𝑠𝑡 ( 𝐼𝑠 ⊗ 𝐼𝑡))] + 𝛼 (1𝑠⨂1𝑡)
′ ((𝐼𝑠 −𝐽𝑠𝑠)⨂(𝐼𝑡 −
𝐽𝑡𝑡)) 𝛼 (1𝑠⨂1𝑡)}
=1
𝑇𝑟 (𝐼𝑠 −𝐽𝑠𝑠) 𝑇𝑟 (𝐼𝑡 −
𝐽𝑡𝑡) {𝜎2
𝑠 𝑇𝑟 ((𝐼𝑠 −𝐽𝑠𝑠) ⊗ 0) + 𝜎2
𝑡 𝑇𝑟 (0 ⊗ (𝐼𝑡 − 𝐽𝑡𝑡))
+ 𝜎2𝑠𝑡 𝑇𝑟 ((𝐼𝑠 −
𝐽𝑠𝑠)⨂(𝐼𝑡 −
𝐽𝑡𝑡)) + 𝛼 ((𝑠 − 𝑠)⨂(𝑡 − 𝑡))𝛼 }
=1
(𝑠 − 1)(𝑡 − 1) {𝜎2
𝑠𝑡 𝑇𝑟 (𝐼𝑠 −𝐽𝑠𝑠) 𝑇𝑟 (𝐼𝑡 −
𝐽𝑡𝑡) + 0}
𝑬(𝑌′𝐴4𝑌) =1
(𝑠 − 1)(𝑡 − 1) {𝜎2
𝑠𝑡 (𝑠 − 1)(𝑡 − 1)}
Por lo tanto el cuadrado medio de la INTERACCION “ST” es:
∴ 𝑬(𝑌′𝐴4𝑌) = 𝜎2𝑠𝑡

5.3. DISTRIBUCIÓN DE LAS FUENTES DE VARIACION UTILIZANDO MATRIZ DE HELMERT
5.3.1. Prueba de la partición A2.
Sea:
𝑋 = ((𝐼𝑠 −𝐽𝑠𝑠)⨂
1𝑡
√𝑡)
′
𝑌 = (𝑃𝑠⨂1𝑡
√𝑡)′
𝑌
Calculamos la distribución de X:
Media:
Ε(𝑋) = (𝑃𝑠⨂1𝑡
√𝑡)′
Ε(𝑌) = (𝑃′𝑠⨂1′𝑡
√𝑡) 𝛼(1𝑠⨂1𝑡)
Ε(𝑋) = 𝛼 (𝑃′𝑠 1𝑠⨂1′𝑡1𝑡
√𝑡) = 𝛼 (0 ⨂
1′𝑡1𝑡
√𝑡)
∴ Ε(𝑋) = 0
Varianza:
𝑉𝑎𝑟(𝑋) = (𝑃𝑠⨂1𝑡
√𝑡)′
(𝜎2𝑠 (𝐼𝑡 ⊗ 𝐽𝑡) + 𝜎2
𝑡 ( 𝐽𝑠 ⊗ 𝐼𝑡) + 𝜎2𝑠𝑡 ( 𝐼𝑠 ⊗ 𝐼𝑡)) (𝑃𝑠⨂
1𝑡
√𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (𝑃𝑠⨂
1𝑡
√𝑡)′
(𝐼𝑡 ⊗ 𝐽𝑡) (𝑃𝑠⨂1𝑡
√𝑡) + 𝜎2
𝑡 (𝑃𝑠⨂1𝑡
√𝑡)′
( 𝐽𝑠 ⊗ 𝐼𝑡) (𝑃𝑠⨂1𝑡
√𝑡)
+ 𝜎2𝑠𝑡 (𝑃𝑠⨂
1𝑡
√𝑡)′
( 𝐼𝑠 ⊗ 𝐼𝑡) (𝑃𝑠⨂1𝑡
√𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (𝑃′𝑠 𝐼𝑡 𝑃𝑠 ⊗
1′𝑡 𝐽𝑡 1𝑡
𝑡) + 𝜎2
𝑡 (𝑃′𝑠 𝐽𝑠 𝑃𝑠 ⊗1′𝑡 𝐼𝑡 1𝑡
𝑡) + 𝜎2
𝑠𝑡 (𝑃′𝑠 𝐼𝑠 𝑃𝑠 ⊗1′𝑡 𝐼𝑡1𝑡
𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (𝑃′𝑠 𝑃𝑠 ⊗
1′𝑡1𝑡1′𝑡1𝑡
𝑡) + 𝜎2
𝑡 (𝑃′𝑠 1𝑠1′𝑠 𝑃𝑠 ⊗1′𝑡1𝑡1′𝑡 1𝑡
𝑡)
+ 𝜎2𝑠𝑡 (𝑃′𝑠 𝑃𝑠 ⊗
1′𝑡 1𝑡
𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (𝑃′𝑠 𝑃𝑠 ⊗ 𝑡) + 𝜎2
𝑡(0 ⊗ 𝑡) + 𝜎2𝑠𝑡 (𝑃′𝑠 𝑃𝑠 ⊗ 1)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 ( 𝐼𝑠−1 ⊗ 𝑡) + 𝜎2
𝑠𝑡 (𝐼𝑠−1 ⊗ 𝑡) = 𝑡𝜎2𝑠 𝐼𝑠−1 + 𝜎2
𝑠𝑡 𝐼𝑠−1
𝑉𝑎𝑟(𝑋) = (𝑡𝜎2𝑠 + 𝜎2
𝑠𝑡) 𝐼𝑠−1
Distribución de X:

𝑋 = (𝑃𝑠⨂1𝑡
√𝑡)′
𝑌 ~ 𝑁(0, (𝑡𝜎2𝑠 + 𝜎2
𝑠𝑡) 𝐼𝑠−1)
Sea
𝑍 =𝑋
√𝑡𝜎2𝑠 + 𝜎2
𝑠𝑡
~ 𝑁(0 , 𝐼𝑠−1)
𝑍′𝑍 ~ 𝜒(𝑠−1)
5.3.2. Prueba de la partición A3.
Sea:
𝑋 = (1𝑠
√𝑠⨂(𝐼𝑡 −
𝐽𝑡𝑡))
′
𝑌 = (1𝑠
√𝑠⨂𝑃𝑡)
′
𝑌
Media:
Ε(𝑋) = (1′𝑠
√𝑠⨂𝑃′𝑡)Ε(𝑌) = (
1′𝑠
√𝑠⨂𝑃′𝑡) 𝛼(1𝑠⨂1𝑡)
Ε(𝑋) = 𝛼 (1′𝑠 1𝑠
√𝑠 ⨂ 𝑃′𝑡1𝑡) = 𝛼 (
1′𝑠 1𝑠
√𝑠 ⨂ 0)
∴ Ε(𝑋) = 0
Varianza:
𝑉𝑎𝑟(𝑋) = (1𝑠
√𝑠⨂𝑃𝑡)
′
(𝜎2𝑠 (𝐼𝑠 ⊗ 𝐽𝑡) + 𝜎2
𝑡 ( 𝐽𝑠 ⊗ 𝐼𝑡) + 𝜎2𝑠𝑡 ( 𝐼𝑠 ⊗ 𝐼𝑡)) (
1𝑠
√𝑠⨂𝑃𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (
1′𝑠
√𝑠⨂𝑃′𝑡) (𝐼𝑠 ⊗ 𝐽𝑡) (
1𝑠
√𝑠⨂𝑃𝑡) + 𝜎2
𝑡 (1′𝑠
√𝑠⨂𝑃′𝑡)( 𝐽𝑠 ⊗ 𝐼𝑡) (
1𝑠
√𝑠⨂𝑃𝑡)
+ 𝜎2𝑠𝑡 (
1′𝑠
√𝑠⨂𝑃′𝑡) ( 𝐼𝑠 ⊗ 𝐼𝑡) (
1𝑠
√𝑠⨂𝑃𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (
1′𝑠 𝐼𝑠 1𝑠
𝑠 ⊗ 𝑃′𝑡 𝐽𝑡 𝑃𝑡) + 𝜎2
𝑡 ( 1′𝑠 𝐽𝑠 1𝑠
𝑠⊗ 𝑃′𝑡 𝐼𝑡 𝑃𝑡)
+ 𝜎2𝑠𝑡 (
1′𝑠 𝐼𝑠 1𝑠
𝑠⊗ 𝑃′𝑡 𝐼𝑡 𝑃𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (
1′𝑠1𝑠
𝑠 ⊗ 𝑃′
𝑡 1𝑡 1′𝑡 𝑃𝑡) + 𝜎2
𝑡 (1′𝑠 1𝑠1
′𝑠1𝑠
𝑠⊗ 𝑃′𝑡𝑃𝑡) + 𝜎2
𝑠𝑡 (1′𝑠 1𝑠
𝑠⊗ 𝑃′
𝑡 𝑃𝑡)

𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (1 ⊗ 0) + 𝜎2
𝑡(𝑠 ⊗ 𝐼𝑡−1) + 𝜎2𝑠𝑡 (1 ⊗ 𝐼𝑡−1)
𝑉𝑎𝑟(𝑋) = 0 + 𝜎2𝑡(𝑠 ⊗ 𝐼𝑡−1) + 𝜎2
𝑠𝑡 (1 ⊗ 𝐼𝑡−1) = 𝑠 𝜎2𝑡 𝐼𝑡−1 + 𝜎2
𝑠𝑡 𝐼𝑡−1
𝑉𝑎𝑟(𝑋) = (𝑠 𝜎2𝑡 + 𝜎2
𝑠𝑡) 𝐼𝑡−1
Distribución de X:
𝑋 = (1𝑠
√𝑠⨂𝑃𝑡)
′
𝑌 ~ 𝑁(0, (𝑠 𝜎2𝑡 + 𝜎2
𝑠𝑡) 𝐼𝑡−1)
Sea
𝑍 =𝑋
√𝑠 𝜎2𝑡 + 𝜎2
𝑠𝑡
~ 𝑁(0 , 𝐼𝑡−1)
𝑍′𝑍 ~ 𝜒(𝑠−1)
5.3.3. Prueba de la partición A4.
Sea:
𝑋 = ((𝐼𝑠 −𝐽𝑠𝑠)⨂(𝐼𝑡 −
𝐽𝑡𝑡))𝑌 = (𝑃𝑠⨂𝑃𝑡)
′𝑌
Media:
Ε(𝑋) = (𝑃′𝑠⨂𝑃′𝑡) Ε(𝑌) = (𝑃′𝑠⨂𝑃′𝑡) 𝛼 (1𝑠⨂1𝑡)
Ε(𝑋) = 𝛼(𝑃′𝑠 1𝑠 ⨂ 𝑃′𝑡1𝑡) = 𝛼(0 ⨂ 0)
∴ Ε(𝑋) = 0
Varianza:
𝑉𝑎𝑟(𝑋) = (𝑃𝑠⨂𝑃𝑡)′(𝜎2
𝑠 (𝐼𝑠 ⊗ 𝐽𝑡) + 𝜎2𝑡 ( 𝐽𝑠 ⊗ 𝐼𝑡) + 𝜎2
𝑠𝑡 ( 𝐼𝑠 ⊗ 𝐼𝑡))(𝑃𝑠⨂𝑃𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (𝑃′𝑠⨂𝑃′𝑡)(𝐼𝑠 ⊗ 𝐽𝑡)(𝑃𝑠⨂𝑃𝑡) + 𝜎2
𝑡(𝑃′𝑠⨂𝑃′𝑡)( 𝐽𝑠 ⊗ 𝐼𝑡)(𝑃𝑠⨂𝑃𝑡)
+ 𝜎2𝑠𝑡(𝑃′𝑠⨂𝑃′𝑡)( 𝐼𝑠 ⊗ 𝐼𝑡)(𝑃𝑠⨂𝑃𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (𝑃′𝑠 𝐼𝑠 𝑃𝑠 ⊗ 𝑃′𝑡 𝐽𝑡 𝑃𝑡) + 𝜎2
𝑡(𝑃′𝑠 𝐽𝑠 𝑃𝑠 ⊗ 𝑃′𝑡 𝐼𝑡 𝑃𝑡) + 𝜎2𝑠𝑡 (𝑃′𝑠 𝐼𝑠 𝑃𝑠 ⊗ 𝑃′𝑡 𝐼𝑡 𝑃𝑡)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (𝑃′𝑠 𝑃𝑠 ⊗ 𝑃′
𝑡 1𝑡 1′𝑡 𝑃𝑡) + 𝜎2
𝑡(𝑃′𝑠 1𝑠1′𝑠 𝑃𝑠 ⊗ 𝑃′𝑡𝑃𝑡) + 𝜎2
𝑠𝑡 (𝑃′𝑠 𝑃𝑠 ⊗ 𝑃′𝑡 𝑃𝑡)

𝑉𝑎𝑟(𝑋) = 𝜎2𝑠 (𝑃′𝑠 𝑃𝑠 ⊗ 0) + 𝜎2
𝑡(0 ⊗ 𝑃′𝑡𝑃𝑡) + 𝜎2𝑠𝑡 (𝐼𝑠−1 ⊗ 𝐼𝑡−1)
𝑉𝑎𝑟(𝑋) = 0 + 0 + 𝜎2𝑠𝑡 (𝐼𝑠−1 ⊗ 𝐼𝑡−1) = 𝜎2
𝑠𝑡 𝐼(𝑠−1)(𝑡−1)
𝑉𝑎𝑟(𝑋) = 𝜎2𝑠𝑡 𝐼(𝑠−1)(𝑡−1)
Distribución de X:
𝑋 = (1𝑠
√𝑠⨂𝑃𝑡)
′
𝑌 ~ 𝑁(0, 𝜎2𝑠𝑡 𝐼(𝑠−1)(𝑡−1))
Sea
𝑍 =𝑋
√𝜎2𝑠𝑡
~ 𝑁(0 , 𝐼(𝑠−1)(𝑡−1))
𝑍′𝑍 ~ 𝜒((𝑠−1)(𝑡−1))