availability and formal methods for dependable - …bo akademi
TRANSCRIPT

Lecture 4: Various Formal Methods Luigia Petre
Åbo Akademi University, Turku, Finland Faculty of Technology
Department of Information Technologies
Availability and Formal Methods for Dependable Systems
Remainder from the plan 26.4: Availability Classical (measurable) availability Constructive availability Service availability
27.4: Formal methods and availability Several classical formal methods Action systems Network availability with action systems Exercises..

Starting point
Software-based systems Embedded in multiple fields Financial, commercial, medical, nuclear, etc
More and more complex We are software dependent We need systematic methods of construction We need dedicated verification methods

Formal Methods Fault-avoidance (prevention) techniques for constructing
trustworthy systems Consist of a specification language and a construction
and/or verification method Mathematical basis Specification language Based on logics and mathematics (has SEMANTICS!!) Allows the devising of models for the system to be built by
using a specific syntax Construction/verification method can allow The specification of the required properties for verifying that
A model correctly captures a set of requirements A more detailed model correctly develops a less detailed model of the
same system Various analysis types based on the devised models
Some formal methods CSP (Communicating Sequential Processes) CCS (Calculus of Communicating Systems) π-calculus
Ambient calculus UNITY Z B Action systems
CSP For modeling concurrent systems formal language for describing patterns of
interaction in concurrent systems CSP system = a set of processes Each process has its own interface of events and
typed channels Events: for process synchronization Channels: for data communication among channels
Operational semantics Transition rules for each process type
Denotational semantics Traces (special sequences of events)
Constructing CSP systems CSP specifications Describe the allowed behavior of the processes
CSP implementations Describe the actual behavior of the processes
Trace-based refinement Ensure that every trace of an implementation is also
a trace of the corresponding specification
CSP Extensions For hybrid systems and for time-dependent
systems Timed CSP: continuous model of time Tock – regularly marks the passing of time Tools
Software tools Model checker FDR Animator ProBE

Original CSP In Hoare's original 1978 paper: essentially a concurrent
programming language Substantially different syntax than later versions of CSP Did not have mathematically defined semantics Unable to represent unbounded nondeterminism Programs in the original CSP:
a parallel composition of a fixed number of sequential processes
communicating with each other strictly through synchronous message-passing
each process was assigned an explicit name the source or destination of a message was defined by
specifying the name of the intended sending or receiving process
Original CSP example
COPY = *[c:character; west?c → east!c]
[west::DISASSEMBLE || X::COPY || east::ASSEMBLE]
Process algebraic CSP CAR Hoare, Stephen Brookes, A. W. Roscoe
developed and refined the theory of CSP into its modern, process algebraic form
Influenced by Milner’s work on CCS and vice versa 1984: paper on the theory of CSP, 1985: book Third most cited computer science reference in 2006
(source citeseer) changes to the theory motivated by the advent of
automated tools for CSP process analysis and verification Theory and practice of CSP (1997)

CSP Primitives Events communications or interactions indivisible and instantaneous atomic names (e.g. on, off), compound names (e.g.
valve.open, valve.close), or input/output events (e.g. mouse?xy, screen!bitmap)
Primitive processes: fundamental behaviours STOP (the process that communicates nothing, also called
deadlock) SKIP (successful termination).
The CSP formalism
The evolution of processes is based on a sequence of events or actions Visible actions Σ
Interaction with other processes, communication
Invisible action τ Internal computation steps
The CSP language: Syntax Inaction: Stop
Termination, deadlock, incapability of performing any action, either internal or external
Input: in ? x : A P(x) Execute an input action on channel in, get message x of type A,
then continue as P(x) Output: out ! m P(x)
Execute an output action on channel out, send message m, then continue as P(x)
Recursion: P(y1,…,yn) = Body(y1,…,yn) Process definition. P is a process name, y1,…,yn are the
parameters, Body(y1,…,yn) is a process expression
Example: Copy = in ? x out ! m Copy
The CSP Syntax
External (aka guarded, deterministic) choice: P [] Q Execute a choice between P and Q. Do not choose a process
which cannot proceed
Example: (a ? x P(x)) [] (b ? x Q(x)) Execute one and only one input action. If only one is available
then choose that one. If both are available than choose arbitrarily. If none are available then block. The unchosen branch is discarded (commitment)
Internal choice (non-deterministic): P + Q Execute an arbitrary choice between P and Q. It is possible to
choose a process which cannot proceed

The CSP Syntax Parallel operator w/synchronization: P || Q
P and Q proceed in parallel and are obliged to synchronize on all the common actions
Example: (c ? x P(x)) || (c ! m Q) Synchronization: the two processes can proceed only if their
actions correspond Handshaking: sending and receiving is simultaneous (clearly an
abstraction. Buffered communication can anyway be modeled by implementing a buffer process)
Communication: m is transmitted to the first process, which continues as P(m).
Broadcasting: c ! m is available for other parallel processes P ||AQ
P and Q are obliged to synchronize only on the common actions in A They interleave on all the actions not in A
The CSP Syntax Interleaving P ||| Q
completely independent concurrent activity behaves as both P and Q simultaneously the events from both processes are arbitrarily interleaved in time
Hiding: P \ A P \A behaves as P except that all the actions in A are
turned into invisible actions. So they cannot be used anymore to synchronize with other processes.
One possible use of this mechanism is to avoid that external processes interfere with the communication channels in P. (Internalization of communication in P.)
Renaming: P[y/x] P[x/y] behaves as P except that all the occurrences of x
are renamed by y. Typically this serves to create different instances of the
same process scheme
Communicating Systems ? Two related questions: What is a function? Sequential machines Models for computation: lambda-calculus
What is a process? Coffee Machines, Xboxes, distributed systems. Models for interaction: CCS/CSP [80s], Pi [90s]
How to model concurrent behaviours? How to describe processes in a compositional manner? When are two processes equivalent?
Divergence is not necessarily bad. Operational, rather than denotational.

Why Using a Calculus ? A calculus, rather than a purely descriptive model “Calculate” = reason on processes
in a systematic manner using equations. State and prove correctness properties. Reuse basic tools, such as observational
equivalences and proof techniques.
.
CCS Also for modeling concurrent systems CCS system: parallel composition of processes They can synchronize and communicate by using
pre-established links π-calculus CCS extension Links can communicate values AND links First technique for modeling mobility
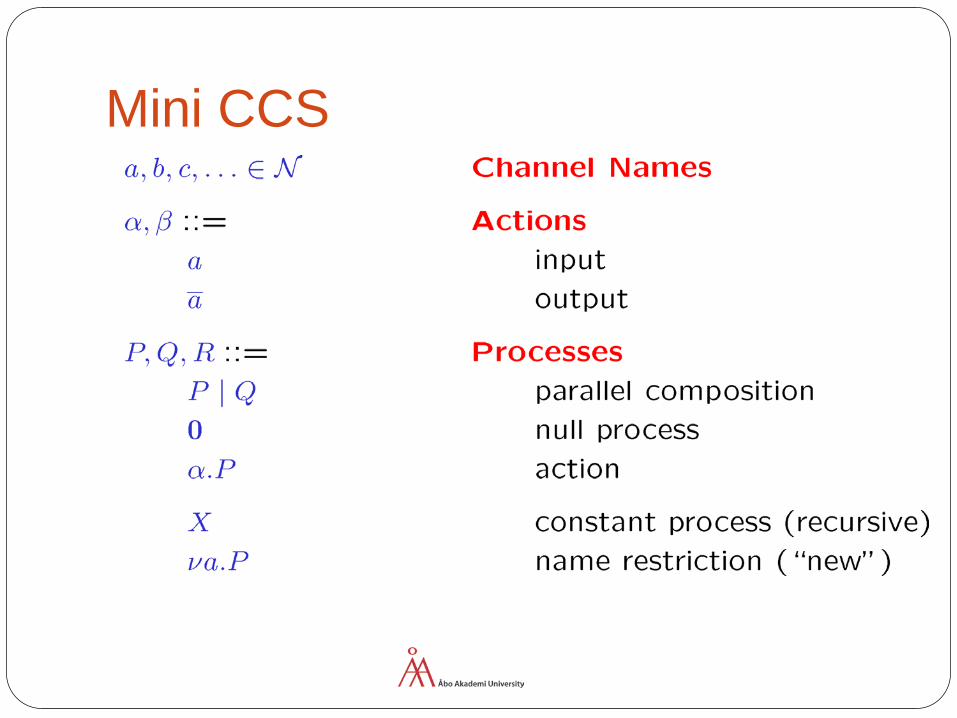
Mini CCS
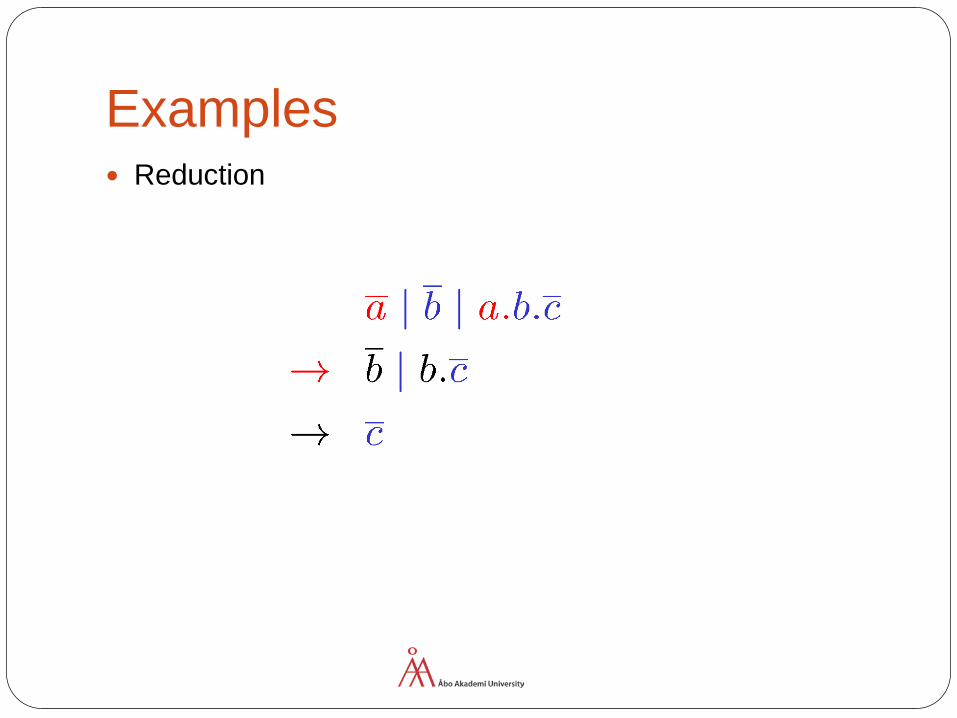
Examples Reduction

Value-Passing CCS
Interaction on free channels, as before Convenient, but not essential: could use more channels
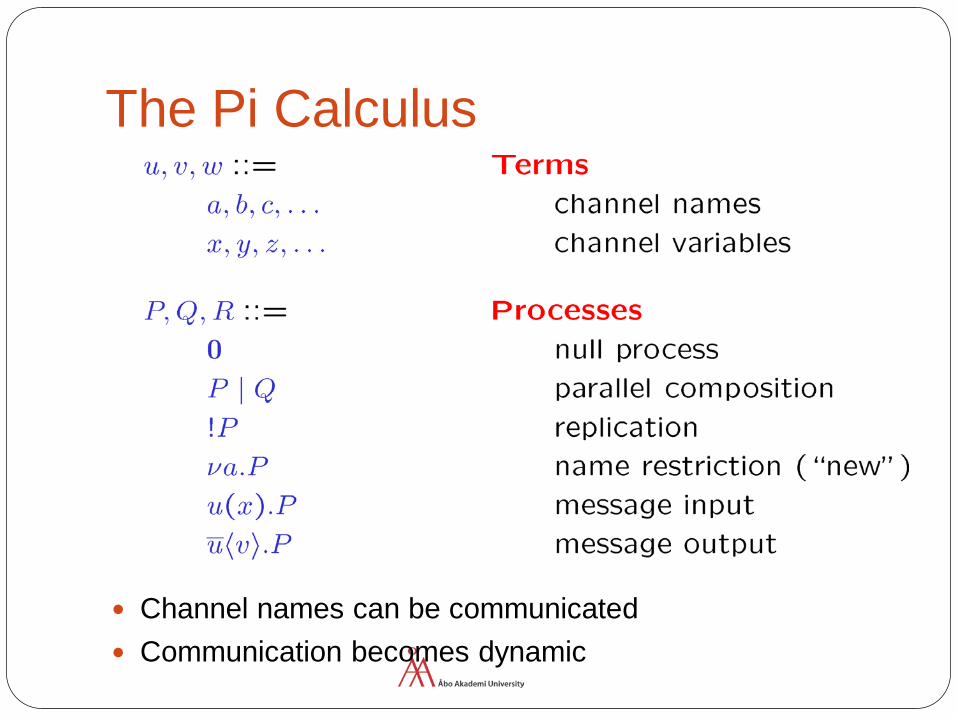
The Pi Calculus
Channel names can be communicated Communication becomes dynamic
Name Mobility “The dynamic creation of new links between active
processes” [Milner]
At a suitable level of abstraction, the location of a process is determined by its links to other processes.
CCS and π-calculus: semantics and constructing systems Operational semantics Labeled transition systems Many variants
Constructing systems We can develop abstract and concrete models Bisimilarity (weak and strong) Behavioral equivalence Ensures that 2 models correspond to each other

Extensions and software for π-calculus Many extensions Exp: OO based on a type system in terms of sorts
Software tools Model checker Mobility WorkBench Verifies also bisimilarity properties
Programming languages based on π-calculus Pict, Nomadic Pict, Piccola
Semantic model for concurrent calculus
Ambient calculus For modeling computations over Internet Ambient Administrative domain in Internet Place where various computations take place Can contain sub-ambients or be contained in a
parent-ambient Sibling ambients can communicate locally Mobility – most important feature Need to cross barriers Stepwise
Mobility postulates Separate locations exist. They may be difficult to
reach. Since different locations have different properties,
both people and programs (and sub-locations!) will want to move between them.
Barriers to mobility will be erected to preserve certain properties of certain locations.
Some people and some programs will still need to cross those barriers.
This is the situation Wide-Area Languages have to cope with

The web

Mobile Computing Mobile devices also move computations. In this
sense, we cannot avoid the issues raised by mobile computation.
Modeling mobility It’s all about barriers: Locality = barrier topology. Process mobility = barrier crossing. Security = (In)ability to cross barriers. Interaction by shared position within a barrier, with
no action at a distance.
Formalisms for concurrency/distribution CSP/CCS. (Static/immutable connectivity.) π-calculus. (Channel mobility.) N.B. "mobility" in this context is not process mobility. Process mobility is reduced to channel mobility.
Ambient Calculus: Process mobility = Barrier crossing.

In π In the π-calculus (our starting point): processes exist in a single contiguous location interaction is by shared names, used as I/O
channels there is no direct account of access control
In ambient calculus: processes exist in multiple disjoint locations interaction is by shared position, with no action at a
distance capabilities, derived from ambient names, regulate
access

Ambients Capture in an abstract way: notions of locality, of
mobility, and of ability to cross barriers. An ambient is a place, delimited by a boundary,
where computation happens. Ambients have a name, a collection of local
processes, and a collection of subambients. Ambients can move in an out of other ambients,
subject to capabilities that are associated with ambient names.
Ambient names are unforgeable (as in π).
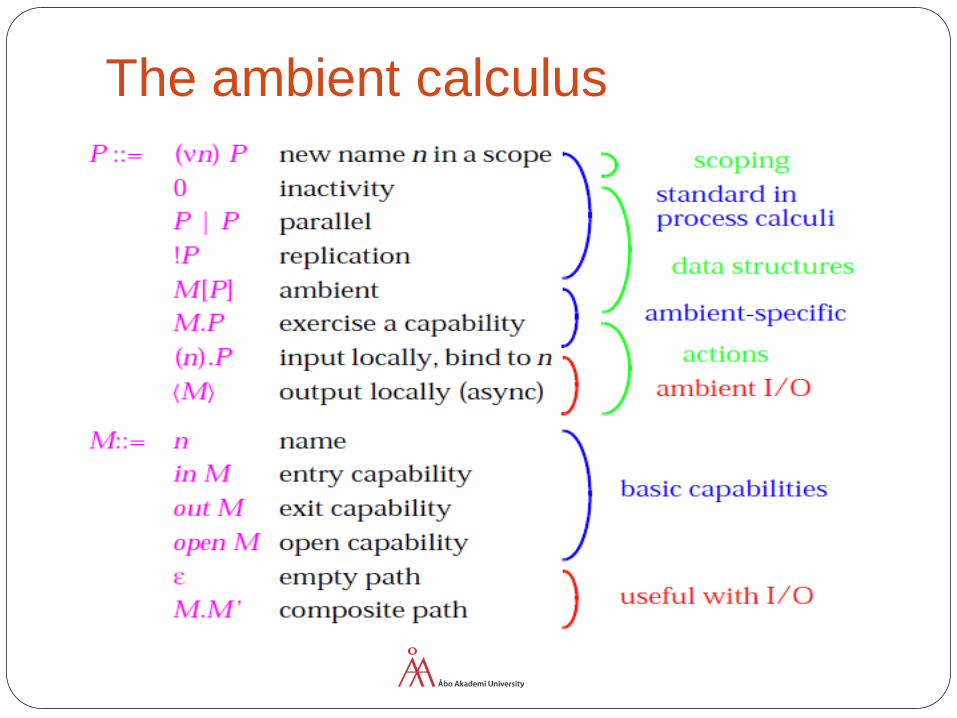
The ambient calculus

An entry capability
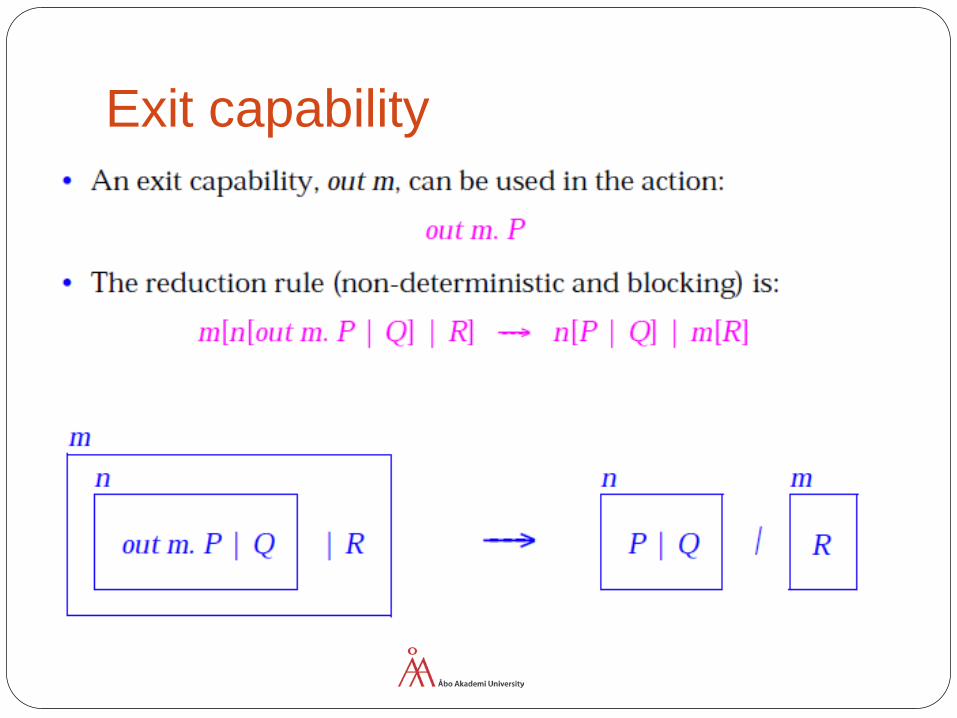
Exit capability
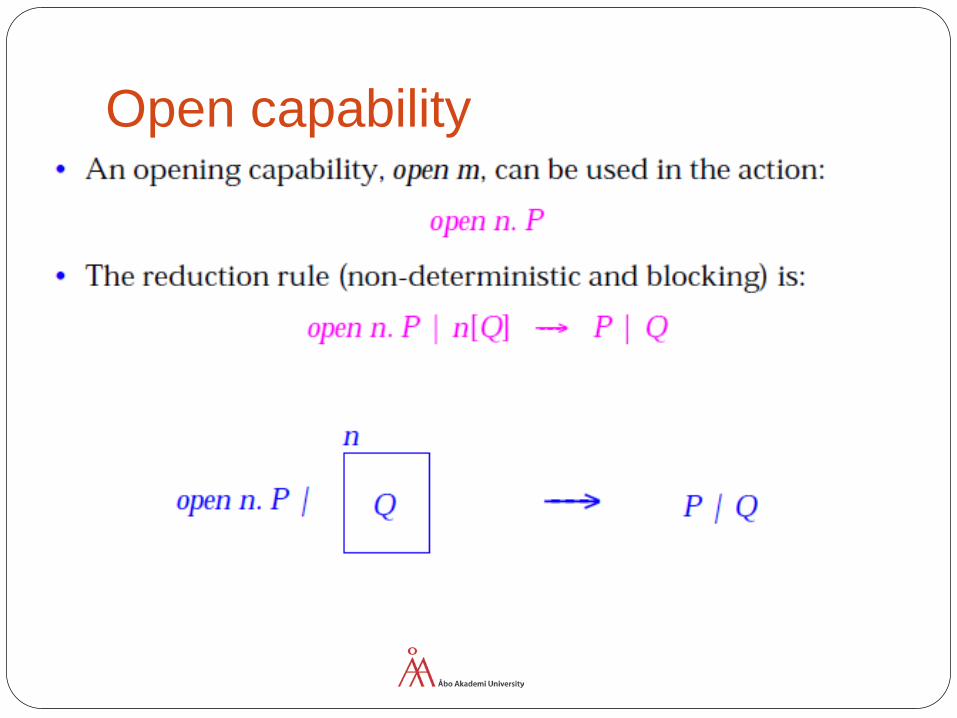
Open capability

Enter reduction
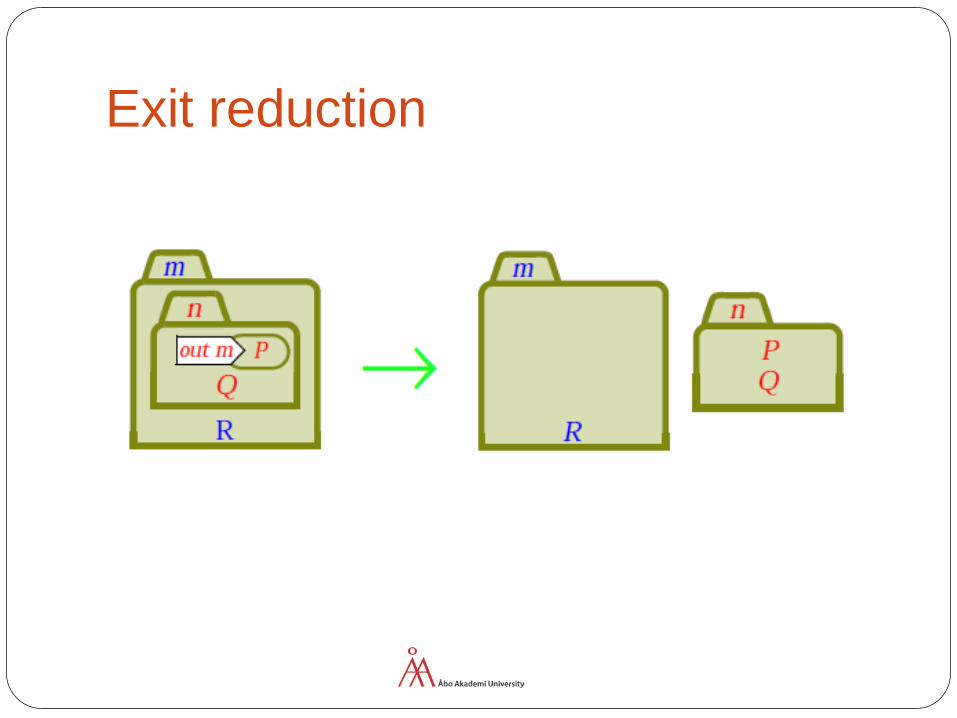
Exit reduction

Open reduction

Ambient calculus: semantics and analysis methods Operational semantics Can express both π-calculus as well as λ-
calculus Expressing properties Communication and mobility types Ensure that communication is correct (well-typed) Mobility can be restricted if desired
Decidable modal logic Model checking for various process properties
(More complex) modal logic for mobility Can express time and space Mobility: change of spatial configurations over time
UNITY State-based formalism for modeling distributed
systems System state
Described by variables Modified by conditional assignments An assignment can be chosen for execution only when its
guarding condition holds Choosing between several executable assignments is weakly
fair UNITY system: more programs
Homonym variables are shared Assignments can execute synchronously or asynchronously

UNITY: semantics and constructing systems Denotational semantics Transition systems
Reasoning about programs Temporal logic: safety and liveness properties can
be expressed and proved wrt the UNITY models Structuring techniques Union and superposition refinement
Mobility in UNITY Mobility Mobile UNITY: specialization of UNITY Programs have “location” variables Specialized conditional assignments execute as
long as their conditions hold centralized “Interactions” section coordinates the
programs The section contains the sharing and synchronization
conditions Dynamic style of computing
Context in UNITY Context-UNITY Specialized version of Mobile UNITY Models environment-sensitive applications “Interactions” section replaced by several “Context”
sections One per program Contain coordination rules
Very flexible systems can be modeled

Z Oldest state-based formalism Modeling systems based on abstract data
types Z-System: variables and operations Variables have types, invariants and initializations Operations are expressed as predicates describing
the system state before and after the operation Z-Schemas (syntactical structures)

Semantics and analysis in Z Semantics based on values Schema S corresponds to θS θS – characteristic binding of S Each declared component is associated with its current
value
Proofs and refinements Based on set theory and logics
Extensions of Z Timed refinement calculus
Z extended with total continuous functions of time Object-Z
Enhances the structuring of Z specifications Class-schema contains all the schemas concerning an
abstract data type Refinement of classes with simulation techniques Reference-based semantics
Variables refer values instead of directly representing them Extra semantics in terms of transition systems
Combinations Timed refinement calculus and Object-Z Object-Z and CSP (and their timed extensions)
B State-based formalism for Modeling, refinement, validation, and
implementation of software systems B specification unit: abstract machine Variables and operations that can evaluate and
modify variables Invariants: Constrain variables Must be preserved by the operations
Modularity, validation and refinement in B Fundamental features of B Modularity System: a collection of machines that are
independently developed Refinement Algorithmic or data refinement
Validation Discharging the proof “obligations” generated in the
refinement process
B supported by software tools Validation Highly automated due existing associated tools
(theorem provers) Atelier-B and B Toolkit
Many proof obligations are discharged automatically by the software
The remaining obligations can be interactively proved
When all the proof obligations are discharged code can be generated in C or ADA

Semantics and extensions in B Semantics Based on an extension of the weakest-precondition
calculus, set theory, logics Extensions Distributed and reactive systems (Event-B) Complex systems (software and hardware)
Event-B A formalism with its roots in the B Method and the
Action Systems framework Development is stepwise from abstract
specification to concrete implementation Models contain static parts, contexts, and
dynamic parts, machines Machines contain variables, invariants, and
events that evaluate and modify variables
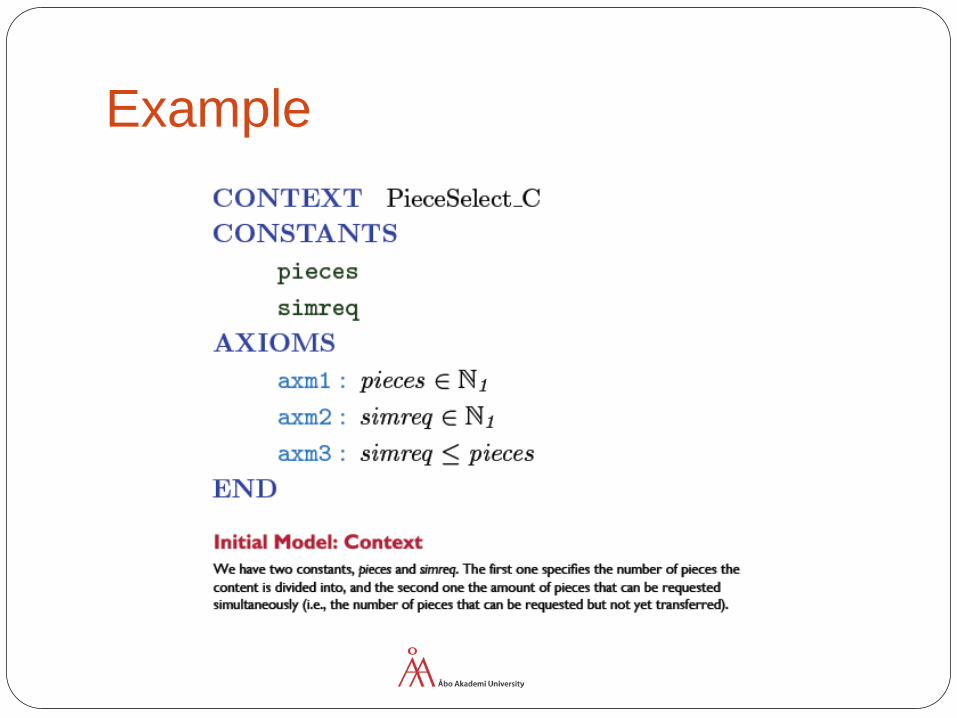
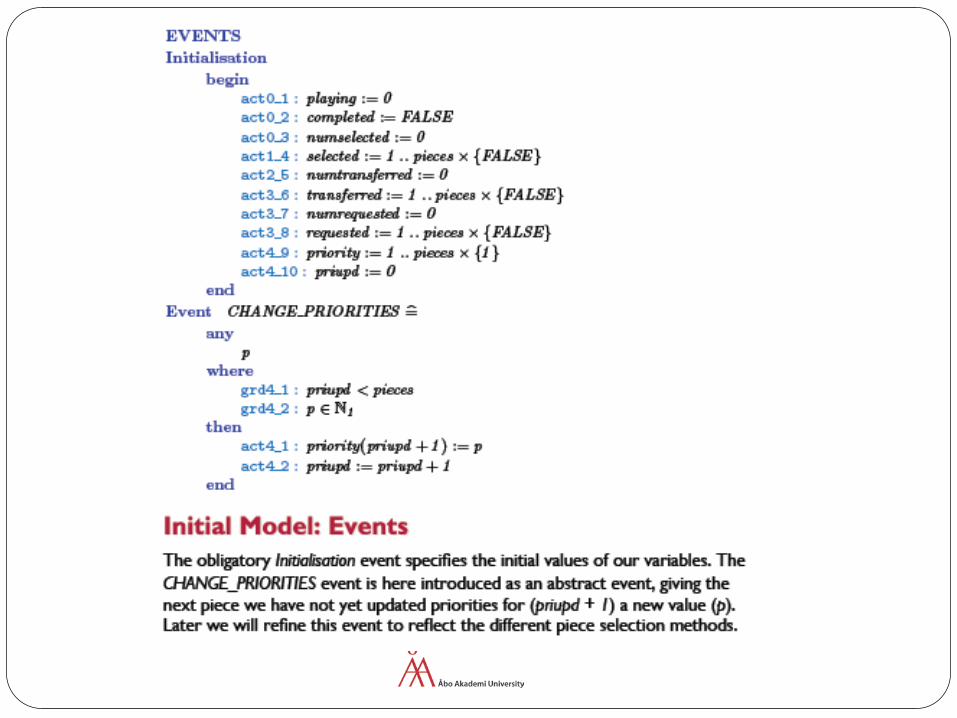
Example

Event-B To achieve a reliable system we use
superposition refinement We add new variables and functionality without
disturbing the previous functioning Each step of the refinement process is proven
mathematically The Rodin Platform provides integrated support
for modelling and proving

Conclusions We have plenty of formal tools to choose from They can model “anything” How to choose? Integrate formal methods? (UML?)
Do they scale? Do they have associated tools?

The motto
The sciences do not try to explain, they hardly even try to interpret, they mainly make models.
John von Neumann
Assignments 1. Describe the fundamental concepts behind
availability and discuss the relationships between the various availability approaches (1-2 pages)
2. What do the components of the service availability measure X=(X1, X2) stand for? Elaborate in 0.5 pages.
3. Write a short essay with the following topic: “Formal methods for dependable system development” (1-2 pages)