algunos aspectos de estabilidad
TRANSCRIPT

Algunos conceptos de estabilidad aplicable
al control basado en modelo

Representación en el espacio de estados
Fuentes de inestabilidad

Ejemplo: Sistema masa-resorte
Ley de Newton de movimiento
fuerza = masa*aceleración
Ecuación de segundo orden, un grado de libertad, diferencial lineal
con coeficientes constantes:
donde:m: Masa del bloqueb: Coeficiente de fricciónk: Rigidez del resorte

Ejemplo: Sistema masa-resorte (I)
Representación en el espacio de estados
Se definen los estados:
Resulta:
En forma matricial:

Ejemplo: Linealización por realimentación
Ecuación de orden n, un grado de libertad
Vector de estados:
Se redefine el vector de estados:
Vector de estados:

Ejemplo: Ecuación de error
Ecuación de error
Representación en el espacio de estados
Se definen los estados:
Resulta:
En forma matricial:

Ejemplo: Ecuación de error (I)
Representación en el espacio de estados
Matriz Jacobiana

Ejemplo: Modelo de referencia
Linealización por realimentación
Ley de control
vdt
xdn
n
=)(
ekekekdt
xdv n
nn
nd
011
1 ...)( ++++= −
− 0... 011
1 =++++ −− ekekeke nn
n
Modelo de referencia yde −=
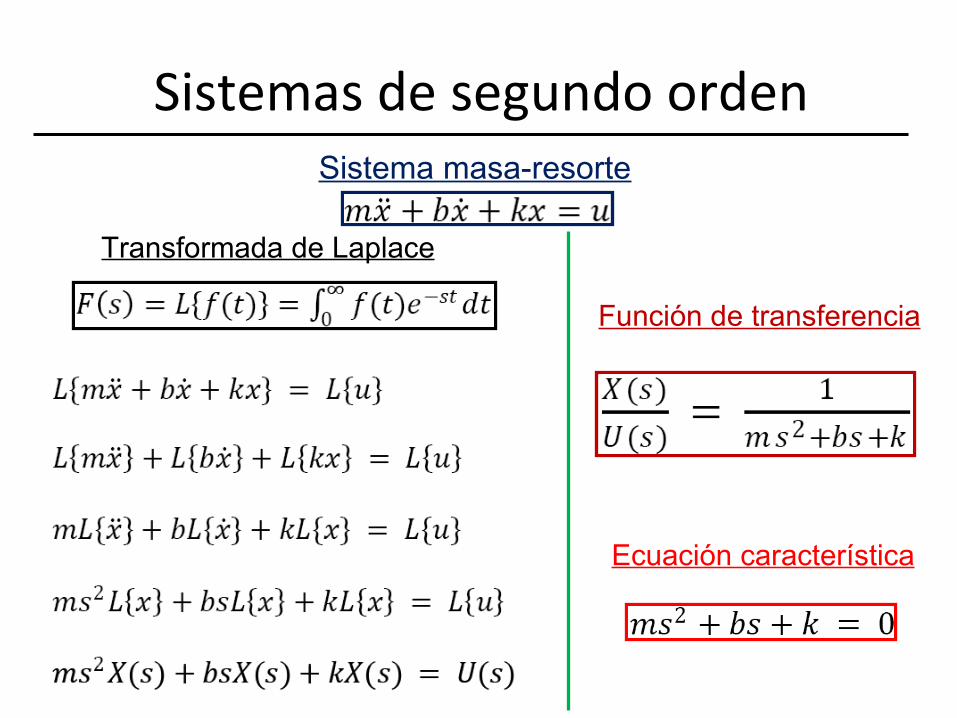
Sistemas de segundo ordenSistema masa-resorte
Función de transferencia
Ecuación característica
Transformada de Laplace

Sistemas de segundo orden (I)Solución de la Ecuación característica

Sistemas de segundo orden (II)Respuesta del sistema en lazo abierto
u=0
function xt = bloque_resp(t,x)m=2; % masak=2.5; % resorte%b=10*sqrt(4*m*k); % Respuesta sobreamortiguada%b=0.1*sqrt(4*m*k); % respuesta subamortiguadab=sqrt(4*m*k); % Respuesta críticamente amortiguada xt = [x(2); (-b/m)*x(2) - k/m*x(1)]; % Resuelve la ecuación diferencial>>[t,x] = ode45('bloque_resp',[0 50],[1; 0]);>>plot(t,x(:,1))

Sistemas de segundo orden (III)Respuesta sobreamortiguada

Sistemas de segundo orden (IV)Respuesta subamortiguada

Sistemas de segundo orden (V)Respuesta críticamente amortiguada
Generalmentemás deseadaen sistemas
de control

Sistemas de segundo orden (VI)
Sistema masa-resorteError de seguimiento de
modelo de referencia
001 =++ ekeke
Ecuación característica:
0012 =++ ksks
Ecuación característica:
Solución: Solución:
2
4
20
211
2,1
kkks
−±−=
Respuesta críticamente amortiguada 4
21
0
kk = 61 =k 096 =++ eee

Sistemas de segundo orden (VII)
096 =++ eee
Representación en el espacio de estados
Error de seguimiento
function et = bloque_resp(t,e)k1=6;k2=9; et = [e(2); -6*e(2) - 9*e(1)];% Resuelve la ecuación diferencial>>[t,e] = ode45('bloque_resp',[0 50],[1; 0]);>>plot(t,e(:,1))

Estabilidad basada en Lyapunov
El sistema es global y asintóticamente estable en el punto de equilibrio
Sistema dinámico no lineal invariante en tiempo

8)()(
)( xxfx
xVxV −=
∂∂=
Estabilidad basada en Lyapunov (I)Ejemplo
5xx −=
Función candidata 425.0)( xxV =
El sistema es estable en el punto de equilibrio5xx −= 0=x

Estabilidad basada en Lyapunov (II)Sistemas lineales
Si para una matriz definida positiva:
Existe una matriz definida positiva:
Que es solución a la siguiente ecuación:
Entonces para una función candidata de Lyapunov:
Su diferencial cumple:

Estabilidad basada en Lyapunov (III)Demostración
Función candidata de Lyapunov:

Teorema de KrasovskiiSistema no lineal
Puede representarse por:
Jacobiano:
La función candidata de Lyapunov se define en términos de f(x) y no de x
Si resulta definida negativa:
Una función candidata de Lypunov es:
Si, adicionalmente, se cumple:
El sistema es global y asintóticamente estable en el punto de equilibrio

Estabilidad basada en Lyapunov (IV)Ecuación de error
Se define la matriz Q (definida positiva):
Por ejemplo:
Debe encontrarse la matriz P definida positiva solución de:
>> P=lyap([0 1;-9 -6]',[1 0;0 1])P = 1.1667 0.0556 0.0556 0.0926>> eig(P) 0.0897 1.1695
Como existe la matriz P definida positiva, el sistema es global y asintóticamente estable en el punto cero de equilibrio

Estabilidad basada en Lyapunov (V)Sistema masa-resorte
Se desea diseñar un controlador estable de la forma:
Sistema equivalente en lazo cerrado:
Se supone la matriz A:
Respuesta críticamente amortiguada 4
21
0
kk =¿Otra opción?

Estabilidad basada en Lyapunov (VI)Sistema masa-resorte
Se define la matriz Q (definida positiva):
>> P=lyap([0 1;-4 -5]',[1 0;0 1])P = 1.1250 0.1250 0.1250 0.1250>> eig(P) 0.1096 1.1404
Solución de matriz P definida positiva:
Coeficientes del controlador solución de:

Estructuras de Control
¿ ?

Estructuras de Control (I)Sistema dinámico
en lazo cerrado
Modelo de referencia
Ley de control: Depende de estados y el modelo de referencia
Salida de la planta: Depende de estados y
la ley de control