algorithms for gps operation indoors and downtownjnt/papers/j090-02-enuv-gps.pdf · gps must...
TRANSCRIPT

Algorithms for GPS operationindoors and downtownNainesh Agarwal Æ Julien Basch Æ Paul Beckmann Æ Piyush Bharti Æ Scott Bloebaum
Stefano Casadei Æ Andrew Chou Æ Per Enge Æ Wungkum Fong Æ Neesha Hathi
Wallace Mann Æ Anant Sahai Æ Jesse Stone Æ John Tsitsiklis Æ Benjamin Van Roy
Abstract The proliferation of mobile devices andthe emergence of wireless location-based serviceshas generated consumer demand for availability ofGPS in urban and indoor environments. This de-mand calls for enhanced GPS algorithms that ac-commodate high degrees of signal attenuation andmultipath effects unique to the ‘‘urban channel.’’This paper overviews the market for location-basedservices and discusses algorithmic innovations thataddress challenges posed by urban environments.
Introduction
The proliferation of mobile devices has generated con-sumer demand for location-based services. With thisemerging market comes new performance requirementsfor GPS. Unlike the military and vehicle navigation ap-plications of the past, to support location-based services,GPS must perform robustly in urban settings – indoorsand outdoors. Receivers must be small and inexpensiveand must compute location in seconds. Conventional GPSreceivers fall short because they are not equipped to dealwith the degree of attenuation and multipath present in
urban environments and take too much time to generate alocation fix.Two advances in GPS technology are required to meetthese new challenges:
1. Assistance data. This is information useful to receptionand analysis of a GPS signal. Examples include a timestamp, the location of a nearby base station, ephemerisinformation, and navigation data. In a transcendentdiscovery of the 1980s, NASA engineers Ralph E. Taylorand James W. Sennott observed that use of such datacan enhance receiver sensitivity and dramaticallyreduce time-to-first-fix. These engineers designed theAssisted GPS (A-GPS) architecture (Taylor and Sennott1984), in which assistance data is transmitted from awireless base station to a GPS receiver in order toenhance performance. Unfortunately, during the 1980sand early 1990s, it was not practical to transmit data tomobile consumer devices. The recent widespreadadoption of wireless networks has made transmissionof assistance data a reality.
2. Advances in GPS signal processing algorithms. Oneapproach to A-GPS involves porting conventional GPSalgorithms to an architecture that supports thetransmission of assistance data. While the perfor-mance of conventional algorithms will benefit fromthe availability of assistance data, this performancestill falls far short of consumer expectations, espe-cially in urban environments. In order to effectivelysupport location-based services, GPS signal processingalgorithms need to be redesigned from the ground up,specifically to address challenges posed by urbanenvironments.
This paper discusses some key algorithmic ideas requiredto achieve the sensitivity, time-to-first-fix, and accuracydemands of location-based services. We review relevantliterature and also discuss a number of innovations thathave grown out of the development of UrbanGPS – a newgeneration of GPS algorithms designed at Enuvis. Ourdiscussion of algorithms will focus on the followingthrusts:
1. Coherent processing. Conventional GPS algorithmsprocess blocks of one or several milliseconds of signalcoherently and combine the results non-coherently.Receiver sensitivity can be amplified if longer durationsof signal – e.g., one or more seconds – are processed
Received: 26 June 2002 / Accepted: 31 July 2002Published online: 13 November 2002ª Springer-Verlag 2002
N. Agarwal Æ J. Basch Æ P. Beckmann Æ P. BhartiS. Bloebaum Æ S. Casadei Æ A. Chou Æ P. Enge Æ W. FongN. Hathi Æ W. Mann Æ J. Stone Æ J. Tsitsiklis Æ B. Van Roy (&)Enuvis Inc., 395 Oyster Point Boulevard,Suite 505, South San Francisco, CA 94080, USAE-mail: [email protected].: +1-650-7250544Fax: +1-650-7231614
P. Enge Æ B. Van RoyStanford University, California 94305, USA
A. SahaiUniversity of California, Berkeley, California, USA
J. TsitsiklisMassachusetts Institute of Technology,Massachusetts, USA
Original article
DOI 10.1007/s10291-002-0028-0 GPS Solutions (2002) 6:149–160 149

coherently. However, coherent processing over longdurations introduces new technical challenges that callfor significant algorithmic innovations.
2. Information fusion. Conventional GPS algorithmsacquire signals from different satellites in a decoupledmanner. This treatment ignores the fact that acquisitionof one or more satellite signals can assist in the ac-quisition of additional signals. Fusion of informationfrom multiple satellites can enhance receiver sensitivity.
3. Anti-multipath triangulation. We use the term triangu-lation loosely. Though the correct term in this contextwould be trilateration, use of the term triangulation hasbecome the norm in the GPS industry. Multipath is thedominant source of error in urban environments.Conventional methods of multipath mitigation, designedprimarily for open-sky applications, do not effectivelyaccommodate the urban setting. Anti-multipath trian-gulation leverages statistical models based on datacollected in urban environments to reduce errors.
4. Time stamp recovery. A critical piece of informationavailable to algorithms operating in an A-GPS archi-tecture is the time stamp. In a CDMA cellular network,base stations are typically able to provide time stampsthat are accurate to within tens of microseconds, andthis simplifies the design of A-GPS algorithms. In someother networks, time stamps can err by a second ormore. Novel algorithms are required to accommodatesuch large time stamp errors.
This paper is organized as follows. In the next section, wediscuss market requirements for location-based servicesand the challenges they pose to GPS. The section Basics ofA-GPS algorithms describes the role of A-GPS algorithms.Subsequent sections discuss various innovations requiredto overcome technical challenges introduced by the newmarket.
Market demand and challenges
Performance demands on GPS are being driven by themarket for location-based services (LBS). In the nextsubsection, we discuss the LBS market, representativeapplications, and the requirements they impose on loca-tion technology. Most of the high-value LBS applicationscall for the high levels of accuracy that can be offered byGPS. In the section The urban challenge we discuss thechallenges that the LBS market poses to GPS.
The market for location-based servicesThe LBS market is projected to grow dramatically over thenext several years. Analysts predict annual revenue to beanywhere from $18 billion (Taylor 2001) to $20 billion(Green and Betti 2000) to $33 billion (Saunders et al. 2000)by 2006. To date, over 50 wireless carriers in Europe andAsia have deployed LBS, generally using low accuracytechnology (e.g., cell ID technology, with a locationuncertainty of 300 m to 2 km). Due to the low level ofprecision available, carriers can only support a limited
number of applications at this time. LBS applications ofhigher value to consumers tend to require better accuracy.There are five categories of location-based services:
1. Information services. This category includes enhanceddirectory assistance, traffic information, and navigationservices. Although some information service applica-tions can function with low accuracy location technol-ogy, much of the value to the consumer will come withincreased accuracy.
2. Trigger services. Location sensitive billing and event-based advertising and promotions are applications thatare classified as trigger services. Location-sensitivebilling allows wireless carriers to compete with landlineconnectivity providers. Event-based advertising can helpa stores to attract potential customers in the vicinity.
3. Entertainment. A large portion of entertainment-relatedLBS consists of gaming applications. Location-enabledgames are anticipated to be multi-player, involvingsmall groups and/or a mass market.
4. Safety. In the US, safety is the primary market driver forlocation technology deployment. While the E-911 man-date in the US and similar anticipated regulation in theEuropean and East Asian markets is the most recogniz-able portion of the safety application segment, it is notexpected to derive substantial revenues for wirelessoperators. Revenues will more likely come from appli-cations such as roadside assistance and personal security.
5. Third party tracking. This consists of enterprise appli-cations, such as fleet management and the tracking ofassets, and consumer applications, primarily of thepeople-finder type. Services to track children and theelderly have already been launched in some regions.People-finder applications are also gaining popularity,particularly among younger consumers.
Table 1 summarizes requirements associated with variousapplications mentioned above. There is clearly strongdemand for the high levels of accuracy that can be offeredby GPS.
The urban challengeKey GPS algorithm performance metrics relevant to LBSapplications include:
• Sensitivity. The level of C/N0 in dB-Hz required for re-liable acquisition of a satellite signal. We take C/N0 todenote the signal power divided by noise power spectraldensity, measured at the input to an A/D converter.1
• Time-to-first-fix (TTFF). The time in seconds requiredto compute a position fix assuming cold-start condi-tions (i.e., no information from previous fixes).
• Accuracy. The root-mean-squared error in metersamong location fixes that are not false alarms.
1Engineers sometimes alternatively define sensitivity in terms ofsignal power requirements at an antenna. Given antenna and RF frontend characteristics and assumptions on noise present in the envi-ronment, this signal power can be mapped to C/N0. In order tofocus inthis paper on algorithm performance, as opposed to receiver perfor-mance, we define sensitivity in terms of C/N0.
Original article
150 GPS Solutions (2002) 6:149–160

Applications discussed in the previous subsection call for alocation technology that offers robust coverage in rural andurban environments – indoors and outdoors – and thisdrives sensitivity requirements. Many of the applicationsrequire 50 m or better accuracy, and there is utility associ-ated with improved accuracy down to the meter level. Fur-thermore, this coverage and accuracy should be deliveredwith a TTFF of less than 10 s. In this section, we presentsome of the challenges that had to be addressed in devel-oping a technology to meet these demands. In particular, wediscuss the levels of sensitivity required to operate in urbanenvironments and the degree of multipath that must bemitigated to offer desired accuracy.There has been some work in the GPS literature to assessand find ways of dealing with attenuation caused by foliage(Spilker 1996c), but virtually none on the effects of urbanenvironments. Figure 1 speaks to the degradation in C/N0
that arises in urban environments. Each plot was producedbased on GPS signals acquired at a particular location.Each presents three histograms – one of C/N0 for thestrongest satellite signal acquired in each signal capture,one for C/N0 of the second strongest signal acquired, andone for C/N0 of the remaining acquired signals. The firstplot is based on data collected under open-sky conditions.Note that the strongest acquired signal is almost always ator above 50 dB-Hz.The second and third plots were generated using datacollected at an outdoor urban location and inside an urbanmall, respectively, both in downtown Tokyo. Observe thatthe C/N0 values are substantially lower than in an open skyenvironment. In an outdoor urban environment, signalsare typically attenuated by 10 to 25 dB, while indoors inthe city, signals are typically attenuated by 25 to 35 dB.These degrees of attenuation are well beyond whatconventional GPS algorithms can accommodate.Urban multipath presents another major hurdle. Figure 2displays two bar graphs. The first represents a signal capturein an open-sky environment, and the second a signalcapture in an outdoor location in Tokyo from which thephotograph in the figure was taken. Each bar graph plotspseudorange errors associated with signals from overheadsatellites. As seen in the first bar graph, in a clear sky envi-ronment, pseudorange errors are typically less than a fewmeters. The second bar graph shows how pseudorangeerrors can be erratic and large in an urban setting. Note thatthree of the pseudoranges err by more than 300 m. Such
large errors translate to poor accuracy if conventional GPSalgorithms are employed.
Basics of A-GPS algorithms
We will discuss later in this paper advances that enableeffective GPS operation despite the aforementionedchallenges. But first, let us present in this section somebackground on A-GPS and the general make up of anA-GPS algorithm.In the A-GPS architecture, in addition to a digitized GPSsignal, several pieces of assistance data are made availableto the GPS algorithm, including:
1. Time stamp. This can be supplied through a cellularnetwork and represents an estimate of the time at whichthe GPS signal capture was initiated. In a CDMAnetwork, time stamps are typically accurate to within100 ls or better. In a GSM network, time stamps can beoff by several seconds.
2. Approximate location. Typically taken to be the loca-tion of the base station from which the mobile devicereceives assistance data, the approximate locationserves as a coarse estimate of the receiver’s location. Inurban areas, the closest base station is typically within afew kilometers of the receiver. In rural areas, the closestbase station can be tens of kilometers from the receiver.
3. Ephemeris information. This is easily obtained througha network, and can be used to compute satellitelocations, velocity, and acceleration.
4. Satellite clock corrections. Satellite clocks drift overtime. At any given time, clock error estimates can beobtained through the network.
5. Differential corrections. As with conventional differen-tial GPS systems, this data is obtained from a referencereceiver network and enhances system accuracy.
6. Navigation data. Navigation data is required for co-herent processing of long durations of signal. With theright algorithms, transmission of navigation data fromthe base station to the mobile device can greatlyenhance sensitivity.
Current standards defined for CDMA and GSM networkssupport transmission of the assistance data enumeratedabove or equivalents.
Table 1Requirements associated withvarious applications of GPS
Application Coverage Accuracy (m) Time-to-first-fix (s)
Enhanced directoryassistance
Indoor, urban, rural 25–100 5–15
Navigation Urban, rural 1–25 1–5Traffic information Urban, rural 300 5–15Location sensitive billing Indoor urban, rural 5–100 1–5Event-based advertising Indoor, urban, rural 50–125 5–15Gaming Indoor, urban, rural 5–250 1–15Emergency services Indoor, urban, rural 50–100 5–30Roadside assistance Urban, rural 75–125 5–30Personal security Indoor, urban, rural 1–50 5–45Person/asset tracking Indoor, urban, rural 30–200 1–30People finder Indoor, urban 1–100 5–15
Original article
GPS Solutions (2002) 6:149–160 151

The job of an A-GPS algorithm is to estimate receiverlocation based on assistance data and the received GPSsignal. An important aspect of A-GPS is that there is noneed for decoding navigation data. This is importantbecause:
1. Conventional GPS receivers acquire signals, then mustgather and decode navigation data for at least 18 s (theduration of the first three subframes) and generallyover 30 s prior to generating a location fix. BecauseA-GPS algorithms do not need to decode navigation
data, it is possible to reduce the time-to-first-fixdramatically.
2. The bit-error-rate associated with decoding navigationdata increases quickly as signals are attenuated by 10 to20 dB. This precludes the high degrees of sensitivity.
Conventional receivers decode navigation data to obtainseveral important pieces of information, including thesignal transmission time, ephemeris information, satelliteclock corrections, and ionospheric delay corrections. Werefer the reader to (Misra and Enge 2001) for a more
Fig. 1Histograms of C/N0 for signals acquired in open sky, in an outdoorurban environment in Tokyo, and in a Tokyo mall
Fig. 2Pseudorange errors in open sky and in downtown Tokyo
Original article
152 GPS Solutions (2002) 6:149–160

detailed account of navigation data and how it is decodedand used in conventional receivers. In A-GPS, the lastthree items do not need to be derived from navigation data– ephemeris information and satellite clock corrections areprovided as assistance data whereas the ionospheric delaycorrections are superseded by differential corrections. Inconventional GPS algorithms, signal transmission timesare critical to pseudorange calculations. However, given atime stamp and approximate location, A-GPS algorithmscan determine pseudoranges without access to signaltransmission times.For concreteness, let us describe at a high-level steps of anA-GPS algorithm. These steps are based on ideas that haveappeared in the A-GPS literature (e.g., Taylor and Sennott1984), which build on more traditional GPS algorithms(see, e.g., Misra and Enge 2001).We begin by introducing notation and simplifying as-sumptions that will keep the exposition brief. Let ‘ denotethe receiver’s location and ~‘‘ the approximate (i.e., basestation) location in Earth-centered Earth-fixed (ECEF)coordinates. Assume that ‘� ~‘‘
��
��
2� 10 km, where �k k2
denotes distance. Assume that there is no rotation un-dergone by the Earth during the time period of interest.Let t be the time at the start of signal capture and the timestamp. We will assume that the time stamp error t � ~ttj j isless than 100 ls (we discuss in the section Time stamprecovery, methods of dealing with a less accurate timestamp). Let us index satellites visible to the receiver by1,...,N. We assume that N ‡4 and that the set of satellitesvisible from the receiver’s location is the same as thatvisible from the approximate location.Let si be the position in ECEF coordinates of the ithsatellite at the time of transmitting the signal captured attime t. The range ri for satellite i is defined byri ¼ si � ‘k k2. Let us assume that there are no significantatmospheric delays, so that the range satisfies ri=(t–ti)c,where ti is the time at which the signal received at time twas transmitted and c is the speed of light. We willmeasure code phase in units of time in the range[0,1] ms. Without loss of generality, assume that the codephase at time 0 is 0. Let si be the code phase received attime t. The time ti that the signal received at time t wastransmitted is then given by ti=Ki10–3+si, for some in-teger Ki. Solving for Ki in terms of t and ri, we get Ki=(t–ri/c–si)103. Let ~rri denote the range of the ith satellite,given by ~rri ¼ si � ~‘‘
��
��
2. Note that Ki ¼ ~tt � ~rri=c� ssið Þ103½ �,
where the brackets denote rounding to the nearest integerand i denotes an estimate of si, if ~tt � ~rri=c� ssið Þ103j� t � ri=c� sið Þ103j < 0:5. This is easily satisfied, forexample, if time stamp error is less than 100 ls andapproximate location error is less than 10 km, asassumed, and the error on the code phase estimate ss isless than 1 km.The main steps of the algorithm are summarized asfollows:
1. Compute satellite positions and identify visible satel-lites. Based on the ephemeris information and the timestamp ~tt, compute positions of all satellites. Identify thecollection of satellites 1,...,N visible from ~‘‘.
2. Acquire signals. For each satellite 1,..., N acquire thesignal to estimate the code phase. Denote estimatedcode phases by ss1; :::; ssN .
3. Compute pseudoranges. For each i, computerKi ¼ ~tt � ~rri=c� ssið Þ103½ �. Then, let tti ¼ Ki10�3 þ ssi, andcompute pseudoranges qi ¼ ~tt � ttið Þc.
4. Triangulate. Note that there are two sources of errorin qi. First, there is the error ssi � si in the code phaseestimate. This error is well modeled as a zero-meanGaussian random variable with some variance r2
i thatcan be estimated in the code phase acquisitionprocess. Second, there is the time stamp error ~tt � t,which is satellite-independent. This term can becorrected during least-squares triangulation. Inparticular, to compute location and the time stamperror d ¼ ~tt � t, we solve the nonlinear least-squaresproblem
min‘‘2<3;d2<
XN
i¼1
1
r2i
qi � dd� ‘‘� si���
���
2
� �2
:
This problem can be addressed by any of a number ofcomputational methods (see, e.g., Bancroft 1985; Misraand Enge 2001).
The simple algorithm described above benefits greatlyfrom the availability of assistance data. In particular, itdoes not need to decode navigation data. This significantlyimproves time-to-first-fix and sensitivity. In particular,even in conventional GPS receivers, signal acquisition isreliable at lower levels of C/N0 than is navigation datadecoding.Despite the advantages afforded by assistance data, use ofconventional algorithms for signal acquisition and trian-gulation (steps 2 and 4 above) in the A-GPS architecturedoes not adequately address the urban challenge. Sub-stantial further improvements in sensitivity are required.Furthermore, least-squares triangulation methods – even ifused in conjunction with conventional multipath mitiga-tion algorithms – yield very poor accuracy in urban en-vironments. The following sections discuss technologicaladvances that enable A-GPS to accommodate require-ments of the LBS market.
Coherent processing
Conventional GPS algorithms coherently processblocks of GPS signal spanning anywhere from 1 to20 ms in duration. The results are then combined non-coherently – that is, the squares or magnitudes of blockcorrelation functions are summed. This non-coherentcombination incurs ‘‘squaring loss,’’ reducing sensitivity(Misra and Enge 2001). Squaring loss is avoided if thereceiver coherently processes over the entire durationof signal captured (e.g., 1–3 s). However, severalobstacles prevent coherent processing in conventionalreceivers:
Original article
GPS Solutions (2002) 6:149–160 153

1. Coherent integration of more than 20 ms of GPS signalrequires knowledge of the satellite’s navigation message.
2. Conventional algorithms for coherent processingimpose onerous computational requirements.
3. Coherent integration over long durations requires so-phisticated signal models to take into account a numberof phenomena that are typically ignored.
The first obstacle is lifted by presence navigation messagesin assistance data. Advances in algorithms and modelingtechniques enable coherent integration over multipleseconds.In the following subsection, we discuss coherent and non-coherent processing and performance benefits afforded bythe former. The section Computational methods intro-duces computational challenges and methods associatedwith coherent processing. The need for sophisticatedmodels and further computational challenges associatedwith such models are discussed in the section Modelingand further computational challenges.
Coherent and non-coherent processingLet us consider the problem of acquiring a GPS signalfrom a single satellite. We begin with a received signal,which we will assume has been preprocessed by down-conversion to in-phase and quadrature base-band com-ponents (the down-conversion is based on the GPS carrierfrequency plus satellite Doppler estimated from assistancedata). We will also assume for simplicity that there is nonavigation data. Hence, the signal can be modeled as
x tð Þ ¼ ay t � sð Þe�2pj ftþ/ð Þ þ x tð Þ; ð1Þ
where a2 is the C/N0, y is the repeated PRN sequence ofperiod 1 ms, s is the code phase, f is the residual Dopplercaused by receiver clock instabilities, user velocity, anddifferences between the approximate and actual receiverlocation, / is the carrier phase, and w is complex whiteGaussian noise with unit power.Assistance information provides intervals s; �ss½ �and f ; �ff
� �
that are known to contain the code phase and Doppler.The problem of acquiring a GPS signal is generally for-mulated in terms of maximum likelihood estimation overs 2 s; �ss½ �; f 2 f ; �ff
� �
, and ae�2pj/ 2 C(the complex ampli-tude). Given a signal captured from time 0 to T, estimatesof s and f are given by:
arg maxs2 s;�ssj j; ff2 f ;�ff½ �
AT ss; ff� �
where the coherent ambiguity function AT is defined by
AT ss; fð Þ ¼Z T
t¼0
x tð Þy t � ssð Þe2pjff tdt
����
����
2
: ð2Þ
Coherent processing simply refers to solution of the aboveproblem. As we will discuss in the next section, simpleapproaches to solving this problem become computa-tionally prohibitive as the duration T of signal capturegrows. Non-coherent processing is an approximation
method that reduces the computational burden. Non-coherent processing involves partitioning the receivedsignal into K blocks of size b=T/K, and estimating codephase and Doppler by maximizing a non-coherentambiguity function given by either
AT ss; ff� �
¼XK
k¼1
Z kb
t¼ k�1ð Þbx tð Þy t � ssð Þe2pjff tdt
�����
�����
!2
; ð3Þ
or
AT ss; ff� �
¼XK
k¼1
Z kb
t¼ k�1ð Þbx tð Þy t � ssð Þe2pjff tdt
�����
�����
2
; ð4Þ
The first Equation (Eq. 3) corresponds to solving a max-imum likelihood problem in which a is assumed to remainconstant over the entire duration, while / is allowed todepend on the block index k, changing from block toblock. The second equation (Eq. 4) corresponds to solvinga maximum likelihood problem in which both a and / areallowed to depend on k. Equation (3) leads to slightlybetter sensitivity than Equation (4), assuming that a isindeed constant.The primary objective of signal acquisition is to obtain agood estimate of the code phase. An acquisition is said tobe false if the resulting code phase estimate ss differs bymore than 1 ls (i.e., one PRN chip) from the true codephase s. There is high cost associated with reporting a falseacquisition rather than acknowledging a failure to acquire.Because of this, it is a standard practice to define athreshold hT, and to report an acquisition only if
AT ss; ff� �
exceeds hT. The value of hT is determined by a
specified probability of false alarm, which we define to be
the probability that AT ss; ff� �
exceeds hT for at least one
pair ss; ff� �
for which ss differs from s by more than 1 ls.
Given a threshold hT and a value a2 of C/N0, we define a
probability of detection to be the probability that AT ss; ff� �
exceeds h for some value of within 1 ls of s. We refer thereader to (Ward 1996a, 1996b) for a more detailed accounton probabilities of false alarm and detection and compu-tation of acquisition thresholds.Let us now discuss how the sensitivity of the first form ofnon-coherent processing [Eq. (3)] compares with that ofcoherent processing [Eq. (2)]. We measure sensitivity herein terms of the lowest C/N0, given any particular signalcapture duration T, at which there is a threshold hT suchthat the probability of false alarm is 10–3 and the proba-bility of detection is 0.5. Let us assume a Doppler range of±500 Hz, a code phase range of [0,50] ls.Figure 3 plots the performance attained for variousdurations of signal capture, for coherent processing andnon-coherent processing with coherent durations T/K of 9and 20 ms. Observe that the sensitivity afforded by half asecond of coherent processing is equal to that offered by2 s of non-coherent combination of 9-ms coherent blocks.Likewise, one second of coherent processing offers the
Original article
154 GPS Solutions (2002) 6:149–160

same level of sensitivity as 12 s of non-coherent combi-nation of 9-ms coherent blocks.Clearly, Fig. 3 points towards enormous sensitivity gains.But the performance advantages of coherent processing donot stop there – there are additional benefits to sensitivityand accuracy not captured by the simple model of signalacquisition defined above:
• In many urban environments, signals from satellites inone region of the sky are much stronger than others thatare obstructed and, therefore, are highly attenuated. Ifonly the strong signals are acquired, the resulting ill-conditioned satellite geometry will lead to high dilutionof precision (DOP) and degraded accuracy. In suchsituations, the sensitivity benefits of coherent process-ing result in a greater number of acquisitions and,therefore, improved DOP and accuracy.
• When received signal power levels vary significantly – asis the norm in urban environments – cross correlationsamong satellite signals can lead to undesired peaks ordistort a desired peak in the ambiguity function. Thishurts sensitivity and accuracy of the code phase esti-mate.2 However, the effect diminishes with the lengthof coherent integration, becoming negligible when theduration of coherent integration exceeds a few hundredmilliseconds. Hence, while cross correlations detractfrom the performance of non-coherent processing,algorithms that process coherently can ignore them.
Computational methodsWe consider methods of coherent processing implementedon a digital processor. As such, we must work with a dis-cretely sampled signal. We consider the model of a received
signal introduced in Eq. (1), except that we take y and w tobe band-pass filtered at ±1.024 MHz, so that the signal canbe represented by samples taken at the Nyquist rate:
x Dkð Þ ¼ ay Dk� sð Þe�2pj f Dkþ/ð Þ þ x Dkð Þ;
where D=0.512 ls and k=0,1,2,....The coherent ambiguity function is very closely approxi-mated by
AT rr; ff� �
¼XT=D½ ��1
k¼0
x kDð Þy kD� ssð Þe2pjff kDD
�����
�����
2
:
Signal acquisition algorithms typically compute and searchover ambiguity values on a finite grid in the space of codephase and Doppler. To define a grid, let T � s; �ssð Þand F � ð f ; �ff Þ be subsets consisting of code phases andDoppler frequencies that are multiples of ‘‘bin sizes’’ Ds
and Df, respectively. We compute the coherent ambiguityvalue ATðrr; ff Þfor each ss 2T and ff 2F. An acquisition isassociated with one of the ambiguity values on this finitegrid exceeding a given threshold hT.There is a loss in sensitivity associated with discretizationof the search – as Ds and Df increase, sensitivity degrades.A reasonable choice of Ds and Df are 0.512 ls and (1/4T)Hz, respectively, which lead to a sensitivity loss of less than1.4 dB. [In the absence of noise, the ratio between thecoherent ambiguity function at its peak and its value0.256 ls and (1/8T) Hz away in the code phase andDoppler dimensions is approximately 1.4 dB.] Note that,to maintain a reasonable degree of loss, Df must be in-versely proportional to T and, therefore, the total numberof grid points grows proportionately with T.In the next subsection, we present some simple approachesto coherent processing and discuss why their computa-tional requirements are prohibitive. There has beensignificant recent work geared towards reducing thecomputational requirements. We describe in the sectionMore advanced algorithms one algorithm representingsome ideas explored over the past few years.
Simple algorithmsCoherent processing algorithms have been studied for a longtime in the GPS and broader spread-spectrum communi-cations literature (see, e.g., Van Dierendonck et al. 1992;Simon et al. 1994; Van Dierendonck 1996). The simplestapproach to coherent processing involves use of time-domain correlation to compute ambiguity values. Inparticular, for each pair ss 2T and ff 2F, this approachcomputes
XT=D½ ��1
k¼0
x kDð Þy kD� ssð Þe2pjff kD;
and then squares. The compute time for this sum growsproportionally with T, and the number of such sums thatneed to be computed grows with F�Tj j, which isproportional to T Tj j. Hence, the total compute time isproportional to T2 Tj j.
Fig. 3Sensitivity of coherent processing and non-coherent processing with20- and 9-ms coherently processed blocks
2Conventional receivers track signals for tens of seconds and, oversuch long durations, differences in Doppler wash out the effect ofcross correlations on accuracy. This is not possible in A-GPS due toTTFF requirements.
Original article
GPS Solutions (2002) 6:149–160 155
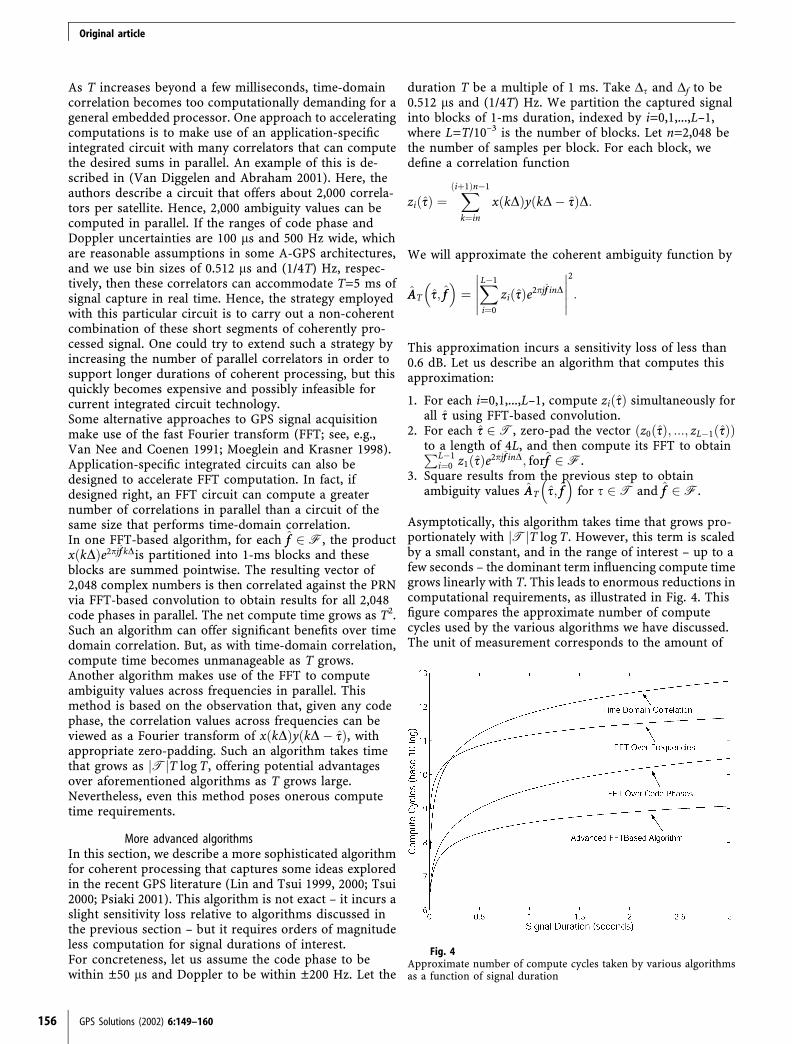
As T increases beyond a few milliseconds, time-domaincorrelation becomes too computationally demanding for ageneral embedded processor. One approach to acceleratingcomputations is to make use of an application-specificintegrated circuit with many correlators that can computethe desired sums in parallel. An example of this is de-scribed in (Van Diggelen and Abraham 2001). Here, theauthors describe a circuit that offers about 2,000 correla-tors per satellite. Hence, 2,000 ambiguity values can becomputed in parallel. If the ranges of code phase andDoppler uncertainties are 100 ls and 500 Hz wide, whichare reasonable assumptions in some A-GPS architectures,and we use bin sizes of 0.512 ls and (1/4T) Hz, respec-tively, then these correlators can accommodate T=5 ms ofsignal capture in real time. Hence, the strategy employedwith this particular circuit is to carry out a non-coherentcombination of these short segments of coherently pro-cessed signal. One could try to extend such a strategy byincreasing the number of parallel correlators in order tosupport longer durations of coherent processing, but thisquickly becomes expensive and possibly infeasible forcurrent integrated circuit technology.Some alternative approaches to GPS signal acquisitionmake use of the fast Fourier transform (FFT; see, e.g.,Van Nee and Coenen 1991; Moeglein and Krasner 1998).Application-specific integrated circuits can also bedesigned to accelerate FFT computation. In fact, ifdesigned right, an FFT circuit can compute a greaternumber of correlations in parallel than a circuit of thesame size that performs time-domain correlation.In one FFT-based algorithm, for each ff 2F, the productx kDð Þe2pjff kDis partitioned into 1-ms blocks and theseblocks are summed pointwise. The resulting vector of2,048 complex numbers is then correlated against the PRNvia FFT-based convolution to obtain results for all 2,048code phases in parallel. The net compute time grows as T2.Such an algorithm can offer significant benefits over timedomain correlation. But, as with time-domain correlation,compute time becomes unmanageable as T grows.Another algorithm makes use of the FFT to computeambiguity values across frequencies in parallel. Thismethod is based on the observation that, given any codephase, the correlation values across frequencies can beviewed as a Fourier transform of x kDð Þy kD� ssð Þ, withappropriate zero-padding. Such an algorithm takes timethat grows as Tj jT log T, offering potential advantagesover aforementioned algorithms as T grows large.Nevertheless, even this method poses onerous computetime requirements.
More advanced algorithmsIn this section, we describe a more sophisticated algorithmfor coherent processing that captures some ideas exploredin the recent GPS literature (Lin and Tsui 1999, 2000; Tsui2000; Psiaki 2001). This algorithm is not exact – it incurs aslight sensitivity loss relative to algorithms discussed inthe previous section – but it requires orders of magnitudeless computation for signal durations of interest.For concreteness, let us assume the code phase to bewithin ±50 ls and Doppler to be within ±200 Hz. Let the
duration T be a multiple of 1 ms. Take Ds and Df to be0.512 ls and (1/4T) Hz. We partition the captured signalinto blocks of 1-ms duration, indexed by i=0,1,...,L–1,where L=T/10–3 is the number of blocks. Let n=2,048 bethe number of samples per block. For each block, wedefine a correlation function
zi ssð Þ ¼Xiþ1ð Þn�1
k¼in
x kDð Þy kD� ssð ÞD:
We will approximate the coherent ambiguity function by
AAT ss; ff� �
¼XL�1
i¼0
zi ssð Þe2pjff inD
�����
�����
2
:
This approximation incurs a sensitivity loss of less than0.6 dB. Let us describe an algorithm that computes thisapproximation:
1. For each i=0,1,...,L–1, compute zi ssð Þ simultaneously forall ss using FFT-based convolution.
2. For each ss 2T, zero-pad the vector z0 ssð Þ; :::; zL�1 ssð Þð Þto a length of 4L, and then compute its FFT to obtainPL�1
i¼0 z1 ssð Þe2pjff inD; forff 2F.3. Square results from the previous step to obtain
ambiguity values AAT ss; ff� �
for s 2T and ff 2F.
Asymptotically, this algorithm takes time that grows pro-portionately with Tj jT log T. However, this term is scaledby a small constant, and in the range of interest – up to afew seconds – the dominant term influencing compute timegrows linearly with T. This leads to enormous reductions incomputational requirements, as illustrated in Fig. 4. Thisfigure compares the approximate number of computecycles used by the various algorithms we have discussed.The unit of measurement corresponds to the amount of
Fig. 4Approximate number of compute cycles taken by various algorithmsas a function of signal duration
Original article
156 GPS Solutions (2002) 6:149–160

time it takes to execute one complex-valued multiplicationand one complex-valued addition. It is assumed that a K-point complex-valued FFT takes 4K log K compute cycles.In each case, the compute time estimate is associated solelywith acquisition of a single satellite signal.It is interesting that – despite having been a long-standingproblem – the state-of-the-art for coherent processing ofGPS signals left much room for innovation. The advanceswe have discussed in this section represent significantstrides in technology for coherent processing. However,they still do not measure up to contemporary challenges,which call for acquisition of possibly ten or more satellitesignals through coherent processing over durations ofmore than a second, all within seconds of compute time.Proprietary research conducted during the development ofUrbanGPS has lead to further advances that address thesedemands.
Modeling and further computational challengesThe signal model we have presented is a simplificationof reality. Real GPS signals are distorted by variousphenomena, including satellite and Earth acceleration,receiver dynamics, receiver oscillator instabilities, andmultipath and fading effects. Many of the complexitiesarising from such phenomena need not be taken into ac-count when designing algorithms that coherently processshort durations of signal and combine results non-coher-ently. However, as the duration of coherent processingincreases, algorithms become sensitive to these effects andbreak down. Novel signal models are required to accom-modate coherent processing over seconds of GPS signal.Such models give rise to a number of additional compu-tational challenges beyond those posed by coherentprocessing with a simple signal model, and efficientalgorithms are required to accommodate the complexitiesof these models. Much research effort has been gearedtowards design of appropriate signal models andcompanion algorithms.
Information fusion
In A-GPS, information from multiple sources can be usedto enhance satellite signal acquisition. The receiver startswith constraints that limit the uncertainty about variablesof interest, including time, receiver location, velocity, andacceleration, and oscillator characteristics. Furthermore,as satellite signals are acquired, each acquisition providesadditional information about these variables. In thissection, we discuss a computational approach for fusingavailable information to enhance sensitivity.
Non-linear filteringAs information is gathered and processed, it can beoptimally fused to aid further acquisition through nonlin-ear filtering. The idea is to maintain and update aprobability distribution over eight variables of interest:three-dimensional receiver location, time, three-dimen-sional receiver velocity, and receiver time velocity, by
which we mean the rate of change of receiver time withrespect to a standard time source. We will refer to thiseight-dimensional space as the geometric search space. Theprobability distribution represents our beliefs at any stageduring signal processing. As more information is pro-cessed, the probability distribution is adapted according toBayes’ rule. This approach to information fusion has beenexplored extensively in the engineering literature (see, e.g.,Elliott et al. 1994) and has also been proposed in thecontext of GPS signal acquisition (Spilker 1996b, p. 298).However, implementation has been impractical due toonerous computational requirements. In the next section,we describe geometric search – an efficient approach toinformation fusion that approximates the performance ofnon-linear filtering.
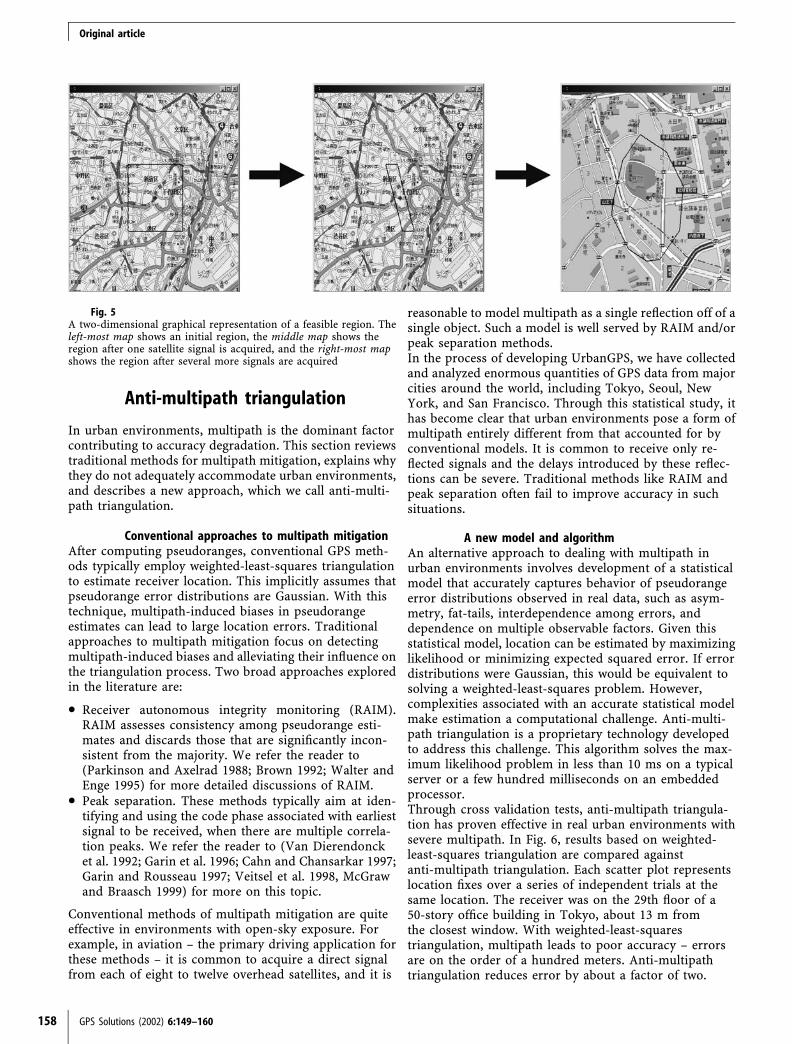
Geometric searchGeometric search operates on the geometric search spacedefined in the previous section. At any time in the pro-cessing, geometric search represents uncertainty in terms ofpolyhedron in this space. This polyhedron defines a regionof feasible points – points outside this region have beenruled out by information gathered up to the current time.Initially, the polyhedron is generated by linear constraintsdeduced from assistance data. For example, upper andlower bounds on time offered by the time stamp lead tolinear constraints. The base station coverage area can alsobe approximated in terms of linear constraints. Bounds onDoppler can be linearized to form additional linearconstraints.As signal processing ensues, whenever a satellite signal isacquired, additional constraints are introduced. In par-ticular, an acquisition constrains the intervals of feasiblecode phases and Dopplers for a satellite, and this translatesinto linear constraints on the geometric search space.Furthermore, as more data are processed, the Doppleruncertainty associated with an acquired satellite signalshrinks, tightening the associated constraints on thepolyhedron.Figure 5 illustrates feasible sets maintained by geometricsearch. The map on the far left depicts a two-dimensionalprojection of an initial feasible region. Upon the acqui-sition of a first satellite signal, new information is in-corporated and the feasible region shrinks, as portrayedby the middle map. As more satellites are acquired, theregion continues to shrink, ultimately leading to a smallfeasible region, as shown in the map to the far right.(Note that the map on the far right is magnified relativeto the others.)At intervals of time during processing, the polyhedron isused to generate constraints on code phase and Doppler.Each constraint is efficiently generated by solving a linearprogram (see, e.g., Bertsimas and Tsitsiklis 1997). Forexample, an upper bound on code phase is produced bymaximizing the code phase – which is a linear function ofthe geometric search space – subject to the polyhedralconstraints on the geometric search space. Such con-straints enhance sensitivity since the acquisition thresholdassociated with a given probability of false alarm decreaseswith the uncertainty in code phase and Doppler.
Original article
GPS Solutions (2002) 6:149–160 157
Anti-multipath triangulation
In urban environments, multipath is the dominant factorcontributing to accuracy degradation. This section reviewstraditional methods for multipath mitigation, explains whythey do not adequately accommodate urban environments,and describes a new approach, which we call anti-multi-path triangulation.
Conventional approaches to multipath mitigationAfter computing pseudoranges, conventional GPS meth-ods typically employ weighted-least-squares triangulationto estimate receiver location. This implicitly assumes thatpseudorange error distributions are Gaussian. With thistechnique, multipath-induced biases in pseudorangeestimates can lead to large location errors. Traditionalapproaches to multipath mitigation focus on detectingmultipath-induced biases and alleviating their influence onthe triangulation process. Two broad approaches exploredin the literature are:
• Receiver autonomous integrity monitoring (RAIM).RAIM assesses consistency among pseudorange esti-mates and discards those that are significantly incon-sistent from the majority. We refer the reader to(Parkinson and Axelrad 1988; Brown 1992; Walter andEnge 1995) for more detailed discussions of RAIM.
• Peak separation. These methods typically aim at iden-tifying and using the code phase associated with earliestsignal to be received, when there are multiple correla-tion peaks. We refer the reader to (Van Dierendoncket al. 1992; Garin et al. 1996; Cahn and Chansarkar 1997;Garin and Rousseau 1997; Veitsel et al. 1998, McGrawand Braasch 1999) for more on this topic.
Conventional methods of multipath mitigation are quiteeffective in environments with open-sky exposure. Forexample, in aviation – the primary driving application forthese methods – it is common to acquire a direct signalfrom each of eight to twelve overhead satellites, and it is
reasonable to model multipath as a single reflection off of asingle object. Such a model is well served by RAIM and/orpeak separation methods.In the process of developing UrbanGPS, we have collectedand analyzed enormous quantities of GPS data from majorcities around the world, including Tokyo, Seoul, NewYork, and San Francisco. Through this statistical study, ithas become clear that urban environments pose a form ofmultipath entirely different from that accounted for byconventional models. It is common to receive only re-flected signals and the delays introduced by these reflec-tions can be severe. Traditional methods like RAIM andpeak separation often fail to improve accuracy in suchsituations.
A new model and algorithmAn alternative approach to dealing with multipath inurban environments involves development of a statisticalmodel that accurately captures behavior of pseudorangeerror distributions observed in real data, such as asym-metry, fat-tails, interdependence among errors, anddependence on multiple observable factors. Given thisstatistical model, location can be estimated by maximizinglikelihood or minimizing expected squared error. If errordistributions were Gaussian, this would be equivalent tosolving a weighted-least-squares problem. However,complexities associated with an accurate statistical modelmake estimation a computational challenge. Anti-multi-path triangulation is a proprietary technology developedto address this challenge. This algorithm solves the max-imum likelihood problem in less than 10 ms on a typicalserver or a few hundred milliseconds on an embeddedprocessor.Through cross validation tests, anti-multipath triangula-tion has proven effective in real urban environments withsevere multipath. In Fig. 6, results based on weighted-least-squares triangulation are compared againstanti-multipath triangulation. Each scatter plot representslocation fixes over a series of independent trials at thesame location. The receiver was on the 29th floor of a50-story office building in Tokyo, about 13 m fromthe closest window. With weighted-least-squarestriangulation, multipath leads to poor accuracy – errorsare on the order of a hundred meters. Anti-multipathtriangulation reduces error by about a factor of two.
Fig. 5A two-dimensional graphical representation of a feasible region. Theleft-most map shows an initial region, the middle map shows theregion after one satellite signal is acquired, and the right-most mapshows the region after several more signals are acquired
Original article
158 GPS Solutions (2002) 6:149–160

Time stamp recovery
Our discussion of A-GPS has revolved around methodsthat make use of a time stamp within hundreds of mi-croseconds of the true time. When such an accurate timestamp is not available, time stamp recovery algorithms arerequired. Syrjarinne (2000) provides a nice overview ofapproaches to time stamp recovery, which he partitionsinto three classes:
1. Base station synchronization. A network operator cansynchronize base stations with GPS time by incorporat-ing location measurement units (LMUs), which areessentially GPS receivers that interface with base stations.
2. Navigation data alignment. In A-GPS, navigation data isreceived as assistance information. By aligning this datawith the signal received from a satellite, transmissiontime can be determined, and an accurate time stampcan be deduced from this.
3. Enhanced triangulation. It is easy to formulate aproblem of generating location and a time correctionfrom a coarse initial time stamp and either code phasesor navigation bit transition times. Such a problemcan be solved by more sophisticated versions oftriangulation, which we refer to as enhancedtriangulation.
Syrjarinne (2000) points towards enhanced triangulation asthe approach of choice. Significant work has been directedtowards development of associated computational methods(Camp 1997; Syrjarinne 2000, 2001; Akopian and Syrjarinne2002; Sirola and Syrjarinne 2002). Although this workrepresents important progress, there are some drawbacks tothe general approach of enhanced triangulation:
1. Enhanced triangulation methods that have appeared inthe literature require acquisition of five satellite signalsfor robust operation (Camp 1997; Syrjarinne 2000,2001; Akopian and Syrjarinne 2002; Sirola andSyrjarinne 2002).
2. Coherent processing algorithms require an accuratetime stamp to operate efficiently. In the enhanced tri-angulation approach, acquisition is carried out prior totime stamp recovery. This precludes coherent process-ing over long durations.
3. When pseudorange errors are large (e.g., a hundredmeters are more), as is common in urban environ-ments, enhanced triangulation methods can lead toerroneous estimates of satellite positions. This amplifiesthe error introduced by urban multipath.
Despite shortcomings, Syrjarinne (2000) finds enhancedtriangulation to be preferable because of obstacles pre-sented by alternative approaches. Base station synchroni-zation is impractical because deployment of LMUsrequires a prohibitively large investment. As fornavigation data alignment, Syrjarinne (2000) identifies thefollowing as obstacles:
1. Alignment of navigation data requires a correlationprocess that can lead to false acquisitions and,therefore, erroneous time estimates.
2. Navigation data alignment presents computationalchallenges.
3. Such an approach requires an initial time stamp withina few seconds of the true time, because only a fewseconds of navigation data are available to the receiver.
4. Navigation data alignment is not reliable when C/N0 islow.
We argue that these obstacles can be overcome and thatnavigation data alignment is a very effective approach totime stamp recovery. The first obstacle disappears if onesets the correlation threshold to appropriately bound theprobability of a false alarm. There are sophisticated algo-rithms that can address the second issue. The third hurdlecan be overcome by making greater amounts of navigationdata available to the receiver and using the fact that muchof the navigation message repeats each 30 s. In the eventthat sufficient navigation data can not be made available,one might employ enhanced triangulation to recover abetter time stamp, and then follow up by applying navi-gation data alignment to compute a more accurate timestamp and estimates of satellite and receiver locations.As indicated by the fourth item, sensitivity suffers whenthe time stamp is inaccurate. More specifically, efficientnavigation data alignment calls for C/N0 to be at a levelthat enables reliable acquisition with non-coherent sum-ming of coherent blocks of about 10 ms in duration. Given
Fig. 6Anti-multipath triangulationreduces errors by about a factorof two relative to conventionalweighted-least-squares triangula-tion. The 68.3 percentile erroris 104 m with conventionaltriangulation and 55 m withanti-multipath triangulation
Original article
GPS Solutions (2002) 6:149–160 159

2 s of signal capture, the C/N0 required is about 6 dBhigher than that which would be required for signal ac-quisition with coherent processing and an accurate timestamp. Fortunately, this bears little noticeable impact onreceiver sensitivity as observed by the end user, forreasons that we will now explain.It is important to note that the C/N0 requirement fornavigation data alignment is satisfied if any one of thereceived satellite signals is sufficiently strong. This is be-cause time stamp recovery can be accomplished using asingle satellite signal. Once this time stamp is recovered,the remaining satellite signals can be processed coherently.As illustrated by the histograms of Fig. 1, in challengingurban and indoor environments there is typically signifi-cant variance among C/N0 offered by different satellitesignals. A location fix generally requires that four satellitesignals offer C/N0 sufficient for acquisition by coherentprocessing algorithms. It turns out that in most real-worldscenarios where this happens, the strongest satellite signalis at least 6 dB stronger than the weakest one acquired.Hence, the use of navigation data alignment to recover aCDMA-grade time stamp does not significantly affect theability of the receiver to acquire a location fix.
References
Akopian D, Syrjarinne J (2002) A network aided iterated LSmethod for GPS positioning and time recovery without navi-gation message decoding. Proceedings of Institute of Electricaland Electronics Engineers PLANS 2002, Palms Springs
Bancroft S (1985) An algebraic solution of the GPS equations.IEEE Trans Aerospace Electr Syst AES-21(7)
Bertsimas D, Tsitsiklis JN (1997) Introduction to linear optimi-zation. Athena Scientific, Bellmont
Brown RG (1992) A baseline GPS RAIM scheme and a note on theequivalence of three RAIM methods. Navigation 39(3):301–316
Cahn CR, Chansarkar MM (1997) Multipath corrections for a GPSreceiver. Proceedings of Institute of Navigation GPS 1997, SaltLake City
Camp W (1997) Method for determining the location of a GPSreceiver using an estimated reference time. US Patent 6,084,544,filed December 1997, issued July 2000
Elliott RG, Aggoun L, Moore JB (1994) Hidden Markov models:estimation and control. Series on applications of mathematics,vol 29. Springer, Berlin Heidelberg New York
Garin L, Rousseau J (1997) Enhanced strobe correlator multipathrejection for code and carrier. Proceedings of Institute of Nav-igation GPS-97, Salt Lake City, pp 559–568
Garin L, Van Diggelen F, Rousseau J (1996) Strobe and edgecorrelator multipath mitigation for code. Proceedings of Insti-tute of Navigation GPS-96, Salt Lake City, pp 657–664
Green J, Betti D (2000) Mobile location services. Short report 23,Ovum Ltd., London, December
Lin DM, Tsui JBY (1999) Direct P(Y)-code acquisition algorithmfor software GPS receivers. Proceedings of Institute of Naviga-tion GPS 99, part 1, Salt Lake City, pp 363–368
Lin DM, Tsui JBY (2001) A software receiver for weak signals.Institute of Electrical and Electronics Engineers InternationalMicrowave Symposium, Phoenix, 20–25 May
McGraw GA, Braasch MS (1999) GNSS multipath mitigation usinggated and high resolution correlator concepts. Proceedings ofthe Institute of Navigation National Technical Meeting, SanDiego, pp 333–342
Misra P, Enge P (2001) Global positioning system: signals, mea-surements, performance. Ganga-Jumana Press, Lincoln, MA
Moeglein M, Krasner N (1998) An introduction to SnapTrackserver-aided GPS technology. Proceedings of Institute ofNavigation GPS, Salt Lake City
Parkinson BW, Axelrad P (1988) Autonomous GPS integritymonitoring using the pseudorange residual. Navigation35(2):255–274
Psiaki ML (2001) Block acquisition of weak GPS signals in asoftware receiver. Proceedings of Institute of Navigation GPS2001, Salt Lake City
Saunders J, Moss J, Beckert S (2000) European wireless locationservices. Strategis Group, March 2001
Simon MK, Omura JK, Scholtz RA, Levitt BK (1994) Spreadspectrum communications handbook, revised edn. McGraw-Hill, New York, pp 751–900
Sirola N, Syrjarinne P (2002) Solving GPS time and positionwithout navigation data. Proceedings of Institute of Electricaland Electronics Engineers PLANS 2002, Palm Springs
Spilker JJ Jr (1996b) Fundamentals of signal tracking theory. In:Parkinson BW, Spilker JJ Jr (eds) Global positioning system:theory and applications, vol I. American Institute of Aeronau-tics and Astronautics, Washington, DC, pp 245–328
Spilker JJ Jr (1996c) Foliage attenuation for land mobile users. In:Parkinson BW, Spilker JJ Jr (eds) Global positioning system:theory and applications, vol I. American Institute of Aeronau-tics and Astronautics, Washington, DC, pp 569–582
Syrjarinne J (2000) Possibilities for GPS time recovery with GSMnetwork assistance. Proceedings of ION GPS 2000, pp 955–966
Syrjarinne J (2001) Keeping time with mobiles. GPS World,January 2001
Taylor P (2001) Location-based services: positioning the mobileInternet for success in Europe?’ Yankee Group Rep 5(4) April2001
Taylor RE, Sennott JW (1984) Navigation system and method. USPatent 4,445,118, filed May 1981, issued April 1984
Tsui JB (2000) Fundamentals of global positioning systemreceivers: a software approach. Wiley, New York
Van Dierendonck AJ (1996) GPS receivers. In: Parkinson BW,Spilker JJ Jr (eds) Global positioning system: theory andapplications, vol I. American Institute of Aeronautics andAstronautics, Washington, DC, pp 329–407
Van Dierendonck AJ, Fenton P, Ford T (1992) Theory andperformance of narrow correlator spacing in a GPS receiver.Navigation 39(3):265–283
Van Diggelen F, Abraham C (2001) Indoor GPS technology.Global Locate White Paper, San Jose
Van Nee DJR, Coenen AJRM (1991) New fast GPS acquisitiontechnique using FFT. Electron Lett 27(2):158–160
Veitsel VA, Zhdanov AV, Zhodzishsky MI (1998) The mitigationof multipath errors by strobe correlators in GPS/GLONASSreceivers. GPS Solutions 2(2):38–45
Walter T, Enge P (1995) Weighted RAIM for precision approach.Proceedings of Institute of Navigation GPS, Salt Lake City
Ward PW (1996a) Satellite signal acquisition and tracking. In:Kaplan ED (ed) Understanding GPS: principles and applica-tions. Artech House Publishers, Norwood, MA
Ward PW (1996b) GPS receiver search techniques. Proceedings ofthe IEEE 1996 Position, Location, and Navigation Symposium,22–26 April, Atlanta, GA, pp 604–611
Original article
160 GPS Solutions (2002) 6:149–160