a novel method for quantifying value in spaceborne soil ... · a novel method for quantifying value...
TRANSCRIPT

A Novel Method for Quantifying Value in Spaceborne Soil Moisture Retrievals
WADE T. CROW
Hydrology and Remote Sensing Laboratory, USDA Agricultural Research Service, Beltsville, Maryland
(Manuscript received 3 February 2006, in final form 19 May 2006)
ABSTRACT
A novel methodology is introduced for quantifying the added value of remotely sensed soil moistureproducts for global land surface modeling applications. The approach is based on the assimilation of soilmoisture retrievals into a simple surface water balance model driven by satellite-based precipitation prod-ucts. Filter increments (i.e., discrete additions or subtractions of water suggested by the filter) are thencompared to antecedent precipitation errors determined using higher-quality rain gauge observations. Asynthetic twin experiment demonstrates that the correlation coefficient between antecedent precipitationerrors and filter increments provides an effective proxy for the accuracy of the soil moisture retrievalsthemselves. Given the inherent difficulty of directly validating remotely sensed soil moisture products usingground-based observations, this assimilation-based proxy provides a valuable tool for efforts to improve soilmoisture retrieval strategies and quantify the novel information content of remotely sensed soil moistureretrievals for land surface modeling applications. Using real spaceborne data, the approach is demonstratedfor four different remotely sensed soil moisture datasets along two separate transects in the southern UnitedStates. Results suggest that the relative superiority of various retrieval strategies varies geographically.
1. Introduction
Despite significant advances in the development ofremote sensing techniques for surface soil moisture, ob-jective quantification of value for soil moisture retriev-als remains an elusive goal. Traditional remote sensingproduct validation is based on the direct intercompari-son of retrieved quantities with, presumably higher-accuracy, ground-based measurements. Significantprogress has been made in the design of field experi-ments and operational networks that facilitate the up-scaling of point-scale soil moisture ground observationsto a spatial support comparable to the resolution ofspaceborne microwave radiometers (Jackson et al.1999; Famiglietti et al. 1999; Jacobs et al. 2004; Cosh etal. 2004). However, these approaches are still generallylimited in space (by the extent of the network) and/ortime (by the length of the field experiment).
A broader view of assigning value to remote sensingretrievals also requires that some consideration be
given to the manner in which data will be utilized inhigher-order applications. A key application for re-motely sensed soil moisture retrievals is their assimila-tion into land surface models at the core of atmosphericand hydrologic prediction systems (Leese et al. 2001).A robust determination of value for remote sensingobservations in modeling applications should reflectour ability to obtain comparable information fromother observational resources. For global soil moistureproducts, the fundamental issue is how much marginalvalue retrievals add to model-based soil moisture esti-mates above and beyond what is obtainable from waterbalance modeling using globally available precipitationproducts (Crow et al. 2005a). Past work has demon-strated the potential for enhancing soil moisture pre-dictions from global land surface models using space-borne soil moisture products (Reichle and Koster2005), but such efforts are generally hampered by limi-tations in the availability and accuracy of ground-basedsoil moisture observations.
Here we propose an alternative methodology forquantifying the value of soil moisture remote sensingretrievals for global land surface modeling applications.The approach is based on the assimilation of remotelysensed soil moisture retrievals into a simple linear wa-
Corresponding author address: W. T. Crow, Hydrology and Re-mote Sensing Laboratory, USDA Agricultural Research Service,Rm. 104, Bldg. 007, BARC-W, Beltsville, MD 20705.E-mail: [email protected]
56 J O U R N A L O F H Y D R O M E T E O R O L O G Y VOLUME 8
DOI: 10.1175/JHM553.1
JHM553

ter balance model (driven by satellite-based global pre-cipitation products) using a standard Kalman filteringmethodology. The novelty of the approach originatesnot from its simple data assimilation and modelingmethodology, rather the manner in which filtering re-sults are subsequently interpreted. Specifically, filter in-crements (discrete additions or subtractions of watersuggested by the filter in response to soil moisture re-trievals) are compared to antecedent rainfall errors—calculated as the difference between currently availableglobal precipitation products and higher-quality gauge-based products available only in precipitation data–richareas of the globe. The correlation between past rain-fall errors and current filter increments reflects the abil-ity of the soil moisture retrievals to add value to model-based soil moisture estimates obtained using currentlyavailable global precipitation products. Our central hy-pothesis is that the strength of this correlation can beinterpreted as a robust proxy for the added value ofspaceborne soil moisture in global modeling applica-tions and therefore provides valuable feedback infor-mation for developers of spaceborne soil moistureproducts.
If verified, the advantage of this approach over tra-ditional validation techniques would be twofold. First,it would provide a framework for quantifying the value-added information content in remote sensing obser-vations. That is, its utility above and beyond soil mois-ture information that is currently available from analy-sis of global precipitation products. In addition, itwould allow any precipitation data–rich area of theglobe (e.g., the contiguous United States) to be treatedas a continental-scale test bed site for quantifyingthe value of spaceborne soil moisture retrievals overthe larger fraction of the globe that is precipitationdata–poor. Currently such test beds are limited to rela-tively sparse space and time periods in which suffi-ciently dense ground-based soil moisture observationsare available.
Section 2 describes the datasets and study sites em-ployed in the analysis. The development of the dataassimilation–based approach is described in section 3.Section 4 tests the proposed approach using syntheti-cally generated remote sensing observations, andsection 5 uses the approach to establish a large-scaletest bed in the southern United States in which fourseparate spaceborne soil moisture datasets are evalu-ated.
2. Data and study sites
Two separate daily precipitation datasets are used inthe analysis. Satellite-based precipitation products are
taken from the one latitude–longitude degree daily(1DD) Global Precipitation Climatology Project (GPCP)rainfall product based on infrared retrievals from theTelevision Infrared Observation Satellite (TIROS) Op-erational Vertical Sounder (TOVS) and the Geosta-tionary Operational Environmental Satellite (GOES)and passive microwave measurements from the SpecialSensor Microwave Imager (SSM/I) (Huffman et al.2001). Over some continental areas, GPCP-1DDmonthly rainfall totals are corrected to match sparseground-based observations (Huffman et al. 2001).However, at finer time scales the product relies exclu-sively on satellite-based precipitation estimates. Formany areas of the world, such satellite-based productsrepresent the best available source of precipitationdata. Nevertheless they are prone to error, especiallyover land (McPhee and Margulis 2005). The secondprecipitation dataset is the National Centers for Envi-ronmental Prediction’s (NCEP’s) Climate PredictionCenter (CPC) retrospective rainfall product over thecontiguous United States. The product is based on com-bining CPC real-time rain gauge observations withthose from available non-real-time networks to yieldapproximately 13 000 rain gauge observations of dailyrainfall. Following the approach of McPhee and Mar-gulis (2005), CPC data processed as part of the NorthAmerican Land Data Assimilation System (NLDAS)project (see Cosgrove et al. 2003) is aggregated into adaily (0000–0000 UTC ) 1° latitude–longitude productto match the temporal and spatial attributes of theGPCP-1DD dataset. As noted by McPhee and Margulis(2005), CPC-based daily rainfall products derived inthis manner likely represent the best currently availableestimate of daily rainfall accumulations within the con-tiguous United States.
Four separate remotely sensed soil moisture datasetsare also considered in the analysis. The first two arebased on X-band (10.6 GHz) brightness temperature(TB) observations from the Tropical Rainfall Measur-ing Mission (TRMM) Microwave Imager (TMI) andthe soil moisture datasets described in Bindlish et al.(2003) (TMIUSDA) and Gao et al. (2006) (TMILSMEM).The TMILSMEM product is based on application of theLand Surface Microwave Emission Model (LSMEM)described in Drusch et al. (2001) and Gao et al. (2004).TMI X-band TB observations are available on a roughlydaily basis since late 1997 and have a ground-basedspatial resolution of approximately 382 km2. Because ofTRMM orbital characteristics, observations are avail-able only for the latitude band between 40° north andsouth. The second two soil moisture products are basedon the application of the LSMEM (AMSR-ELSMEM)and Njoku et al. (2003) retrieval approaches to X-band
FEBRUARY 2007 C R O W 57

observations obtained from the Advanced MicrowaveScanning Radiometer (AMSR-E) aboard the NationalAeronautics and Space Administration (NASA) Aquasatellite. The Njoku et al. (2003) algorithm provides thebasis of the official NASA level 3 AMSR-E soil mois-ture product (AMSR-ENASA). The algorithm has beenmodified from its original form to eliminate reliance onC-band observations corrupted by large amounts of ra-dio frequency interference over the United States (E.Njoku 2006, personal communication). AMSR-E X-band T� observations have been globally availablesince mid-2002 with a global repeat time of 2 to 3 daysand spatial resolution of approximately 402 km2. Allsoil moisture products were aggregated in time andspace to form a daily 1° latitude–longitude soil moistureproduct consistent with the GPCP-1DD rainfall prod-uct.
The analysis will focus on the eight 1° latitude–longitude boxes shown in Fig. 1. The first four boxesstretch from the panhandle area of Texas (TX) intocentral Oklahoma (OK) and will be referred to as the“TX/OK transect.” This transect samples across astrong precipitation and vegetation gradient with semi-arid shrublands prevailing in the west (box 1) and morehumid, and densely vegetated, cropland and forestcover emerging along its eastern edge (box 4). Theother four boxes span an area of the southeasternUnited States from northern Alabama (AL) to south-western Georgia (GA) and will be referred to as the“AL/GA transect.” Relative to the TX/OK transect,denser vegetation and more pronounced topographywithin the AL/GA transect present a greater challengefor soil moisture remote sensing. Land cover is gener-ally a mixture of forested upland areas, crops (corn,soybean, peanuts, and cotton), and pasture.
3. Methodology
The methodology is based on a simple antecedentprecipitation index (API) approach to water balancemodeling. Here, API for day i is defined as
APIi � �APIi�1 � Pi, �1�
where Pi is satellite-based GPCP-1DD precipitationand � is the API loss coefficient. The API model isapplied separately to each of the 1° latitude–longitudeboxes shown in Fig. 1. For simplicity, � is set equal to0.85 for all boxes. The impact of error in the specifica-tion of � is addressed in section 4a.
a. Kalman filtering
For linear forecasting models with Gaussian errors, aKalman filter provides the optimal method of updatingthe expectation and error covariance of a model stateforecast (e.g., API) with noisy observations (e.g., re-motely sensed soil moisture retrievals �RS). The firststep in this process is defining a measurement operatorcapable of converting �RS retrievals into API values.Here the operator is defined by calculating a leastsquares regression line (with slope b and intercept a)for the observed long-term relationship between APIand �RS. Separate regression relationships are calcu-lated for each of the 1° latitude–longitude boxes shownin Fig. 1. However, data within each box are temporallylumped and potential seasonal variability is neglected.Unlike (1), API values used to define this relationshipare derived from the gauge-based CPC rainfall product.
Using a and b defined by these regression relation-ships, the Kalman filters predicts that the optimal up-dating of expected API at time i—based on the simul-taneous observation of �RS—is given by
FIG. 1. Location of 1° lat–lon study boxes. Boxes 1–4 are referred to as the Texas/Oklahoma(TX/OK) transect. Boxes 5–8 are referred to as the Alabama/Georgia (AL/GA) transect.
58 J O U R N A L O F H Y D R O M E T E O R O L O G Y VOLUME 8

APIi� � APIi
� � Ki��RSi� a � bAPIi
��, �2�
where K is the Kalman gain
Ki � bTi���b2Ti
� � S�, �3�
T is the dynamic error in model-predicted API, and S isthe error in �RS retrievals. The “�” and “�” symbols in(2) and (3) reflect quantities before and after updating,respectively. The update equation in (2) relates themagnitude of changes in API soil moisture budgetingwarranted by consideration of �RS observations. Theseupdates, Ki (�RSi
� a � b API�i ), are commonly re-
ferred to as “analysis increments.” The Kalman gain Kdescribes how optimal choices for increments dependon the magnitude of b, T, and S. Note how either largeobservation error (S) or a lack of sensitivity betweenobservations and model states (low b) are associatedwith small analysis increments (low K). Conversely,larger model forecast uncertainty T or lower observa-tion error S increases K and leads to larger adjustmentsto API via (2). Since the availability of observationsreduces uncertainty in API forecasts, model forecasterror T is also adjusted at measurement times via
Ti� � �1 � bKi�Ti
� . �4�
Between soil moisture observations, and the adjust-ment of API and T via (2) and (3), the model state APIis temporally updated using observed P and (1). In par-allel, model forecast error T is updated in time follow-ing
Ti� � �2Ti�1
� � Q, �5�
where Q relates the uncertainty added to an API fore-cast as it is propagated from time i � 1 to i.
Selecting appropriate values for the observation vari-ance S in (3) and the forecast noise parameter Q in (5)is often a challenging aspect of Kalman filtering. Animportant diagnostic tool for addressing this problem isthe statistical analysis of filter innovations, �RSi
� (a �bAPI�
i ), encountered when applying (2) (Reichle et al.2002). For fully linear systems where Q and S are cor-rectly specified, implementation of the Kalman filterwill lead to a temporal sequence of normalized filterinnovations
�i � �RSi� �a � bAPIi
� �2��b2Ti� � S� �6�
that are mean one (Dee 1995).The overall Kalman filter analysis stream goes as fol-
lows. Magnitudes of API and T are initialized at somedefault value and are propagated to the first observa-tion time using (1) and (5). At this time, API and T areupdated for the impact of observed �RS using (2) and
(4). Updated T and API values are then temporallyrepropagated using (1) and (5) until the next observa-tion time and the cycle is repeated. For calibration ofsynthetic filtering results presented in section 4, S isassumed known and the magnitude of Q is adjusteduntil filtering leads to a normalized innovation (�) se-quence with a mean of one. Both Q and S are consid-ered constant in time. Additional calibration details forreal-data cases presented in section 5 are discussed insection 4b.
While the execution of the filter via (1)–(5) can ap-pear somewhat involved, its role in this analysis is verystraightforward. The Kalman filter simply presents anoptimal methodology whereby water can be added orsubtracted from API predictions in response to theavailability of surface soil moisture observations. Byconsidering relative errors in both model forecasts (T)and the remotely sensed observations (S), the filtermakes these updates in such a way that the error in APIforecasts is minimized.
b. Definition of Rvalue
Kalman filter analysis increments, defined via (2) asKi(�RSi
� a � bAPI�i ), describe the depth of water
added or subtracted from the API model in the courseof assimilating �RS. If �RS retrievals are minimallyaccurate and the filter properly constructed, these in-crements should correlate in some manner with ante-cedent rainfall forcing errors. Specifically, positive(negative) rainfall errors should lead to the removal(addition) of water in the near future. The availabilityof high-quality rain gauge observations for precipita-tion data–rich areas like the contiguous United Statesprovides a means by which the quality of updates madeto an API model (driven by poor-quality GPCP-1DDdaily rainfall) via the assimilation of remotely sensedobservations can be evaluated. This, in turn, opens upthe possibility of using precipitation data–rich areas asa large-scale test beds for remotely sensed surface soilmoisture products.
Figure 2 demonstrates basic aspects of the approachusing the TMILSMEM soil moisture product. For a pe-riod of time in spring 2003, Fig. 2a displays total dailyGPCP-1DD and CPC rainfall estimates (see section 2)for the 1° latitude–longitude box centered at 35.5°N,�102.5°W (box 1 in Fig. 1). Note how, relative to themore accurate CPC product, the satellite-based GPCP-1DD rainfall retrieval underestimates the magnitude ofa rainfall event on 19–20 March and subsequently over-estimates rainfall for a 27–29 March event. Forcing anAPI model with GPCP-1DD precipitation (Fig. 2b)produces an API prediction (Fig. 2b) at odds with theTMILSMEM �RS retrieval (Fig. 2c), which echoes the
FEBRUARY 2007 C R O W 59

CPC rainfall data in suggesting that the 19–20 Marchstorm was the larger of the two events. Consequently,the assimilation of �RS into the API model (Fig. 2b)leads to the Kalman filter analysis increments plotted inFig. 2d. Note the inverse relationship between 5-dayrainfall errors (during periods A and B in Fig. 2) andsubsequent 5-day sums of analysis increments (duringperiods  and B̂ in Fig. 2d, which lag A and B in Fig. 2aby a single day). Underestimation (overestimation) ofprecipitation accumulations during period A (B) is fol-lowed by the addition (subtraction) of water by thefilter during period  (B̂). This inverse relationshipbetween precipitation accumulation errors and subse-quent increment depths suggests that the assimilationof �RS is adequately compensating API predictions fordeficiencies in the GPCP-1DD precipitation product.Over longer periods of time, this relationship manifestsitself as a negative correlation between 5-day sums ofrainfall errors and filter innovations. For box 1 in Fig. 1,Fig. 3 shows a scatterplot of 5-day (pentad) sums ofrainfall errors and filter increments (lagged by 1 day)
for the TMILSMEM dataset during the calendar yearsfrom 1998 to 2004. Here and throughout the analysis,only pentads in which either CPC or GPCP-1DD rain-fall products estimate nonzero rainfall accumulationsare considered. The negative of the standard Pearsoncorrelation coefficient (R) calculated for the relation-ship in Fig. 3 will subsequently be referred to as theRvalue coefficient for a particular remotely sensed soilmoisture product:
Rvalue � �R. �7�
Simply stated, this Rvalue metric reflects the degree towhich temporal API adjustments, made by the Kalmanfilter in response to uncertain �RS observations, are cor-related with antecedent errors in precipitation productsused to calculate API.
4. Synthetic twin experiment analysis
The magnitude of the negative correlation seen inFig. 3 reflects the ability of a remotely sensed soil mois-ture product (and the Kalman filter) to detect (andcorrect) soil moisture modeling errors arising from theuse of noisy precipitation inputs. Our central hypoth-esis is that the strength of this correlation can be used asa robust proxy for the overall information content ofremotely sensed surface soil moisture in global landsurface modeling applications. To test this assumption,we utilize a synthetic twin methodology where a bench-
FIG. 2. Times series of daily (a) rainfall, (b) GPCP-1DD API,(c) remotely sensed soil moisture (TMILSMEM), and (d) Kalmanfilter increments during 2003 for box 1 in Fig. 1.
FIG. 3. For box 1 in Fig. 1 between 1998 and 2004, scatterplot ofrainfall errors (5-day sums) vs Kalman filter analysis incre-ments (5-day sums lagged by 1 day) associated with assimilatingTMILSMEM soil moisture retrievals into an API model; Rvalue isdefined to be the opposite (i.e., negative) of the Pearson correla-tion coefficient for the plot 2.
60 J O U R N A L O F H Y D R O M E T E O R O L O G Y VOLUME 8
mark “truth” simulation of surface soil moisture valuesis synthetically generated using an API modeling ap-proach. These benchmark soil moisture values are thenartificially perturbed with random noise to simulate re-mote sensing observations and reassimilated back intothe API model following section 3. Such experimentsare referred to “synthetic twin experiments” in the dataassimilation literature where they are commonly usedto test assumptions underlying the application of dataassimilation procedures (e.g., Reichle et al. 2002). Un-like real-data cases, the availability of “truth” soil mois-ture in a synthetic twin experiment allows for the ex-plicit calculation of the Pearson correlation coefficientbetween the benchmark soil moisture and the remotelysensed soil moisture retrieval (Rtruth).
Seven years of CPC and GPCP-1DD rainfall datafrom the TX/OK transect are used to force a series ofsynthetic experiments. Using the Kalman filter ap-proach outlined in section 3 and the synthetically de-rived soil moisture observations, Rvalue magnitudes arecalculated following Fig. 3 and (7) for a large number ofcases in which the magnitude of artificial noise addedonto “truth” soil moisture to obtain synthetic observa-tions is systematically varied. In addition, various levelsof rainfall accuracy are obtained by subtracting theGPCP-1DD (satellite based) precipitation time seriesfor a particular 1° latitude–longitude box from theequivalent CPC (gauge based) time series, multiplyingthe difference by a constant ranging between 0.5 and2.0 (see legend in Fig. 4), and then adding the scaleddifference time series back to the CPC daily rainfalltime series.
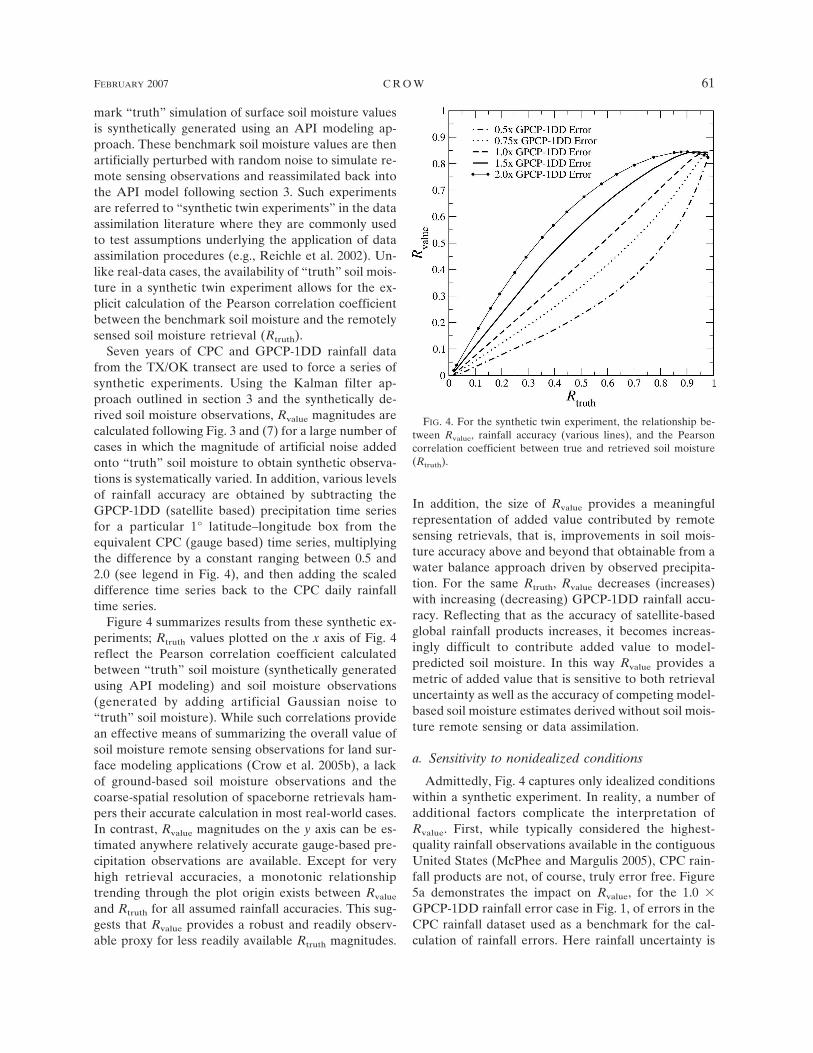
Figure 4 summarizes results from these synthetic ex-periments; Rtruth values plotted on the x axis of Fig. 4reflect the Pearson correlation coefficient calculatedbetween “truth” soil moisture (synthetically generatedusing API modeling) and soil moisture observations(generated by adding artificial Gaussian noise to“truth” soil moisture). While such correlations providean effective means of summarizing the overall value ofsoil moisture remote sensing observations for land sur-face modeling applications (Crow et al. 2005b), a lackof ground-based soil moisture observations and thecoarse-spatial resolution of spaceborne retrievals ham-pers their accurate calculation in most real-world cases.In contrast, Rvalue magnitudes on the y axis can be es-timated anywhere relatively accurate gauge-based pre-cipitation observations are available. Except for veryhigh retrieval accuracies, a monotonic relationshiptrending through the plot origin exists between Rvalue
and Rtruth for all assumed rainfall accuracies. This sug-gests that Rvalue provides a robust and readily observ-able proxy for less readily available Rtruth magnitudes.
In addition, the size of Rvalue provides a meaningfulrepresentation of added value contributed by remotesensing retrievals, that is, improvements in soil mois-ture accuracy above and beyond that obtainable from awater balance approach driven by observed precipita-tion. For the same Rtruth, Rvalue decreases (increases)with increasing (decreasing) GPCP-1DD rainfall accu-racy. Reflecting that as the accuracy of satellite-basedglobal rainfall products increases, it becomes increas-ingly difficult to contribute added value to model-predicted soil moisture. In this way Rvalue provides ametric of added value that is sensitive to both retrievaluncertainty as well as the accuracy of competing model-based soil moisture estimates derived without soil mois-ture remote sensing or data assimilation.
a. Sensitivity to nonidealized conditions
Admittedly, Fig. 4 captures only idealized conditionswithin a synthetic experiment. In reality, a number ofadditional factors complicate the interpretation ofRvalue. First, while typically considered the highest-quality rainfall observations available in the contiguousUnited States (McPhee and Margulis 2005), CPC rain-fall products are not, of course, truly error free. Figure5a demonstrates the impact on Rvalue, for the 1.0 �GPCP-1DD rainfall error case in Fig. 1, of errors in theCPC rainfall dataset used as a benchmark for the cal-culation of rainfall errors. Here rainfall uncertainty is
FIG. 4. For the synthetic twin experiment, the relationship be-tween Rvalue, rainfall accuracy (various lines), and the Pearsoncorrelation coefficient between true and retrieved soil moisture(Rtruth).
FEBRUARY 2007 C R O W 61
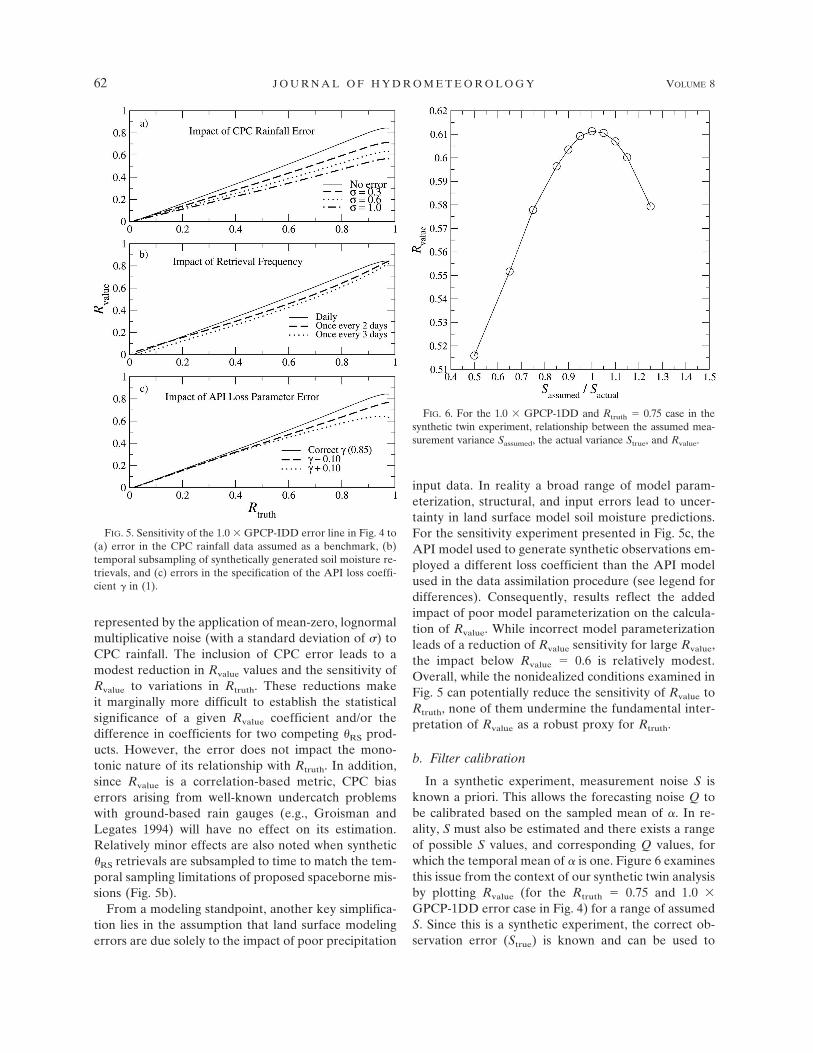
represented by the application of mean-zero, lognormalmultiplicative noise (with a standard deviation of ) toCPC rainfall. The inclusion of CPC error leads to amodest reduction in Rvalue values and the sensitivity ofRvalue to variations in Rtruth. These reductions makeit marginally more difficult to establish the statisticalsignificance of a given Rvalue coefficient and/or thedifference in coefficients for two competing �RS prod-ucts. However, the error does not impact the mono-tonic nature of its relationship with Rtruth. In addition,since Rvalue is a correlation-based metric, CPC biaserrors arising from well-known undercatch problemswith ground-based rain gauges (e.g., Groisman andLegates 1994) will have no effect on its estimation.Relatively minor effects are also noted when synthetic�RS retrievals are subsampled to time to match the tem-poral sampling limitations of proposed spaceborne mis-sions (Fig. 5b).
From a modeling standpoint, another key simplifica-tion lies in the assumption that land surface modelingerrors are due solely to the impact of poor precipitation
input data. In reality a broad range of model param-eterization, structural, and input errors lead to uncer-tainty in land surface model soil moisture predictions.For the sensitivity experiment presented in Fig. 5c, theAPI model used to generate synthetic observations em-ployed a different loss coefficient than the API modelused in the data assimilation procedure (see legend fordifferences). Consequently, results reflect the addedimpact of poor model parameterization on the calcula-tion of Rvalue. While incorrect model parameterizationleads of a reduction of Rvalue sensitivity for large Rvalue,the impact below Rvalue � 0.6 is relatively modest.Overall, while the nonidealized conditions examined inFig. 5 can potentially reduce the sensitivity of Rvalue toRtruth, none of them undermine the fundamental inter-pretation of Rvalue as a robust proxy for Rtruth.
b. Filter calibration
In a synthetic experiment, measurement noise S isknown a priori. This allows the forecasting noise Q tobe calibrated based on the sampled mean of �. In re-ality, S must also be estimated and there exists a rangeof possible S values, and corresponding Q values, forwhich the temporal mean of � is one. Figure 6 examinesthis issue from the context of our synthetic twin analysisby plotting Rvalue (for the Rtruth � 0.75 and 1.0 �GPCP-1DD error case in Fig. 4) for a range of assumedS. Since this is a synthetic experiment, the correct ob-servation error (Strue) is known and can be used to
FIG. 5. Sensitivity of the 1.0 � GPCP-IDD error line in Fig. 4 to(a) error in the CPC rainfall data assumed as a benchmark, (b)temporal subsampling of synthetically generated soil moisture re-trievals, and (c) errors in the specification of the API loss coeffi-cient � in (1).
FIG. 6. For the 1.0 � GPCP-1DD and Rtruth � 0.75 case in thesynthetic twin experiment, relationship between the assumed mea-surement variance Sassumed, the actual variance Strue, and Rvalue.
62 J O U R N A L O F H Y D R O M E T E O R O L O G Y VOLUME 8

normalize assumed S values (Sassumed). For each choiceof Sassumed, forecast error Q is individually calibrated sothat the � time series is mean one. Synthetic resultsplotted in Fig. 6 demonstrate that while Rvalue exhibitssome sensitivity to Sassumed, the largest Rvalue is associ-ated with Sassumed � Strue. Consequently, when consid-ering a range of potential S and Q combinations, eachproducing a mean-unity � time series, the correctchoice will be the S value that also maximizes Rvalue.This additional constraint allows S and Q to beuniquely defined and is used to calibrate the approachfor real-data cases examined in section 5.
5. Real-data analysis
The relationship plotted in Fig. 4 suggests two pri-mary applications for Rvalue estimates. First, if Rvalue isstatistically greater than zero within a test bed location,it demonstrates that remotely sensed soil moisture re-trievals are adding value to soil moisture estimates de-rived from water balance modeling and global rainfallproducts. The use of precipitation data–rich areas astest bed sites can improve our ability to predict theglobal extent of land cover types over which remotelysensed soil moisture contributes value to land surfacemodeling. Second, for a given test bed site, statisticallysignificant differences in Rvalue magnitudes for two (ormore) competing soil moisture products demonstratesthat a particular retrieval algorithm is providing a morevaluable representation of soil moisture dynamics.Based on Fig. 4, larger Rvalue coefficients can be inter-preted as reflecting higher accuracy in soil moistureretrievals and greater value for land surface modelingapplications. This feedback can, in turn, can be ex-ploited to optimize soil moisture retrieval algorithms.
Figure 7 shows Rvalue results for AMSR-E soil mois-ture datasets described in section 2 over the eight 1°latitude–longitude boxes shown in Fig. 1. SinceAMSR-E observations are available once every 2–3days, only 5-day periods containing at least threeAMSR-E observations are used to calculate Rvalue.Plotted results are based on pooling AMSR-E soilmoisture estimates during the calendar years 2003 and2004. Over the TX/OK portion of the transect (boxes1 to 4 in Fig. 1), all Rvalue coefficients are signifi-cantly greater than zero (at a 95% uncertainty thresh-old) for both products in every transect box. How-ever, AMSR-ELSMEM retrievals demonstrate consis-tently larger Rvalue coefficients than comparableAMSR-ENASA retrievals. This difference implies thatAMSR-ELSMEM retrievals correlate better with actualsoil moisture conditions and are of relatively greatervalue for land surface modeling applications within
these sites (Fig. 4). Because of the relatively short his-torical record of AMSR-E observations, Rvalue differ-ences between AMSR-E products are statistically sig-nificant for only one of the four boxes (Fig. 7b). Betterstatistical power is obtained by assuming spatially inde-pendent errors and lumping correlation results from allfour TX/OK transect boxes. After such spatial lumping,Rvalue differences between the two AMSR-E productsare statistically significant at a 95% threshold level(Table 1).
Because of heavier vegetation amounts and morepronounced topography, spaceborne soil moisture re-trieval is relatively more difficult for the AL/GAtransect (boxes 5 to 8 in Fig. 1). This difficulty is re-flected in smaller Rvalue coefficients for the AL/GAtransect relative to the TX/OK transect (Fig. 7a). Nev-ertheless, Rvalue magnitudes (for both products) are sig-nificantly greater than zero for three of the four AL/GA transect boxes (Fig. 7a). In addition, the relativesuperiority of the products is reversed relative to theTX/OK transect. Along the AL/GA transect, theAMSR-ENASA product generally produces larger Rvalue
FIG. 7. (a) Rvalue coefficients and (b) the statistical significanceof coefficient differences for both AMSR-E-based soil moistureproducts along the two transects defined in Fig. 1. The numbers in(a) represent the number of independent pentads used to calcu-late Rvalue.
FEBRUARY 2007 C R O W 63

coefficients than the AMSR-ELSMEM retrievals. How-ever, the statistical significance of these differences islow (Fig. 7b)—even when AL/GA transect boxes arelumped (Table 1).
Figure 8 is identical to Fig. 7, except that it displaysresults for soil moisture products derived from the TMIsensor (rather than AMSR-E). These results have thebenefit of a longer historical period (7 yr versus only 2for AMSR-E) and slightly better temporal frequency.Over the TX/OK transect, assimilation of TMILSMEM
soil moisture retrievals results in a stronger correlationof filter increments with antecedent rainfall errors (i.e.,higher Rvalue coefficients) than the assimilation ofTMIUSDA retrievals (Fig. 8a). The Rvalue coefficient dif-ferences are significant at a 95% threshold level for twoboxes and an 80% threshold level for the other two(Fig. 8b). When transect boxes are spatially lumped, thesignificance of the pooled differences rises to the 99.5%confidence level (Table 1).
As with the AMSR-E soil moisture products, therelative ranking of the TMI soil moisture products re-verses when moving from the TX/OK to the AL/GAtransect. Larger Rvalue coefficients are associated withTMIUSDA soil moisture retrievals than comparableTMILSMEM retrievals over the length of the AL/GAtransect. When transect boxes are spatially lumped,pooled differences are significant at a 93% confidencelevel (Table 1). In addition, the longer TMI heritagemakes it possible to identify statistically significantvalue (i.e., Rvalue significantly larger than zero at the95% confidence level) in both products for all four AL/GA transect boxes.
6. Discussion
Results in Figs. 7 and 8 can be partially explained bymethodological differences among the various retrievalapproaches. For instance, the largest difference be-
tween the AMSR-ELSMEM and AMSR-ENASA ap-proaches examined in Fig. 7 is that the LSMEM ap-proach utilizes only horizontally polarized brightnesstemperatures (TB,H) while the Njoku/NASA algorithmis based on multipolarization TB,H and TB,V observa-tions. The use of TB,V measurements allows the Njoku/NASA approach to simultaneously solve for both veg-etation water content (W) and soil moisture. In con-trast, the single-polarization LSMEM approach relieson ancillary visible remote sensing products to indepen-dently estimate W magnitudes required for soil mois-ture retrieval. Consequently, the ancillary data needs ofthe AMSR-ENASA product are less than those of theAMSR-ELSMEM product. Nevertheless, Fig. 7 demon-strates that, at least over the more lightly vegetatedTX/OK transect, it is preferable to rely on these ancil-lary W estimates rather than incorporate TB,V observa-tions and attempt to solve for W (and soil moisture)using a multipolarization approach. The relative ad-vantage of the single-polarization approach, however,disappears over the more heavily vegetated AL/GAtransect. One potential explanation for this reversal is
TABLE 1. Lumped Rvalue estimates, number of pentads used tocalculate lumped Rvalue estimates (N ), and the two-tailed statisti-cal significance of Rvalue differences (i.e., LSMEM vs NASA orUSDA vs NASA) for the case of pooling all four transect boxes.
Product Transect Rvalue N Significance
AMSR-ENASA TX/OK 0.37 532 95%AMSR-ELSMEM TX/OK 0.51AMSR-ENASA AL/GA 0.27 548 �50%AMSR-ELSMEM AL/GA 0.22TMIUSDA TX/OK 0.30 1889 99.5%TMILSMEM TX/OK 0.42TMIUSDA AL/GA 0.32 1922 93%TMILSMEM AL/GA 0.24
FIG. 8. (a) Rvalue coefficients and (b) the statistical significanceof coefficient differences for both TMI-based soil moisture prod-ucts along the two transects defined in Fig. 1. The numbers in(a) represent the number of independent pentads used to calcu-late Rvalue.
64 J O U R N A L O F H Y D R O M E T E O R O L O G Y VOLUME 8

that the constitutive relationships used to estimate Wfrom ancillary visible-based observations are more ac-curate for crop and grassland environments (e.g., theTX/OK transect) and tend to break down over areaswith more complex canopy structures and/or densewoody vegetation.
The largest difference between the TMILSMEM andTMIUSDA approaches examined in Fig. 8 lies in thesource of land surface temperature (TS) fields used toretrieve surface soil moisture. The Gao/LSMEM ap-proach is based on incorporating independent land sur-face TS estimates from a land surface model running aspart of the NLDAS project while the Bindlish/U.S. De-partment of Agriculture (USDA) approach attempts toretrieve TS using TB,V observations. Both approachesestimate W using visible remote sensing products. Overthe TX/OK transect, the use of the NLDAS TS modelproduct appears to provide the TMILSMEM productwith a significant edge over the TMIUSDA product.However, this tendency reverses itself over the AL/GAtransect. Particularly striking is the lack of a reductionin Rvalue between transects for the TMIUSDA approach(Table 1). Unlike the other three products, TMIUSDA
Rvalue coefficients do not reflect relatively more difficultconditions for soil moisture remote sensing within theAL/GA transect.
Despite the general unsuitability of conditions alongthe AL/GA transect for soil moisture remote sensing,added value (i.e., statistically significant Rvalue) is foundalong its length for all four products. It should be notedthat this added skill is calculated relative to the use oflower-quality GPCP-1DD rainfall data (higher-qualityCPC rainfall data are intentionally withheld to serve asan independent source of evaluation data). The use ofGPCP-1DD rainfall makes results indicative of addedvalue obtainable in precipitation data–poor areas out-side the United States. Consequently, absolute valueresults presented in Figs. 7 and 8 are best interpreted astest bed results that exploit the data-rich environmentof the contiguous United States to reflect the addedvalue of remote sensing observations for precipitationdata–poor regions of the globe.
7. Summary and conclusions
Validation of global remote sensing products is typi-cally based on the use of test bed sites in data-rich areasto characterize retrieval accuracy and value in higher-order application. Unfortunately, our ability to directlyvalidate spaceborne soil moisture products againstground-based observations is currently limited by diffi-culties in maintaining soil moisture instrumentationnetworks and upscaling sparse point-scale observations
of highly variable soil moisture fields to spacebornefootprint scales (10–30 km). In this study we proposeand apply a Kalman filter–based evaluation strategythat does not require the availability of ground-basedsoil moisture measurements and can be applied any-where relatively high quality rain gauge observationsare available (e.g., the contiguous United States). As aresult, the approach greatly expands the geographicand temporal extent of potential ground test bed siteswithin which the value of remotely sensed soil moistureestimates can be assessed. In addition, the approachprovides a quantitative measure of added value that isrelative to the datum established by the accuracy ofcurrently available global rainfall products and simplewater balance modeling. This datum represents a criti-cal benchmark that remotely sensed soil moisture prod-ucts must improve upon in order to contribute value toglobal land surface modeling applications (Crow et al.2005a).
A synthetic twin experiment establishes that the ap-proach yields a metric (Rvalue), which is a well-definedfunction of both the underlying accuracy of the soilmoisture retrievals, as well as the quality of rainfallobservations used to calculate competing model-basedsoil moisture estimates (Fig. 4). This interpretation isnot undermined by benchmark rainfall errors, temporalgaps in soil moisture retrievals, or the misspecificationof model parameters (Fig. 5). Application to realdatasets (Figs. 7 and 8) allows for hypothesis testingconcerning the added value of various remote sensingsoil moisture products for land surface modeling appli-cations. Results indicate that even retrievals from non-optimal, X-band frequency sensors over heavily veg-etated areas (i.e., the AL/GA transect) significantly en-hance the quality of soil moisture predictions derivedfrom a simple water balance model and the spaceborneGPCC-1DD precipitation dataset. Over a large fractionof the earth’s surface, such satellite-based precipitationdatasets provide the only available source of rainfalldata. Consequently, this result offers strong support forthe added utility of spaceborne soil moisture observa-tions for soil moisture monitoring in precipitation data–poor regions of the world. In particular, the presence ofdetectable skill at X band along the AL/GA transectbodes well for future spaceborne missions based onlower-frequency L-band measurements [e.g., the Euro-pean Space Agency Soil Moisture and Ocean Salinity(SMOS) mission (Kerr et al. 2001)]. Any skill present atX band within the AL/GA transect should be enhancedby longer-wavelength observations better suited for thepenetration of dense vegetation canopies.
Results also provide valuable feedback for the designof spaceborne soil moisture retrieval strategies. Figures
FEBRUARY 2007 C R O W 65

7 and 8 suggest that single-polarization approaches thatutilize ancillary W and TS data from outside sources aresuperior over the lightly vegetated TX/OK transect.However, a multipolarization approach that incorpo-rates both TB,H and TB,V measurements in an effort toreduce dependence on ancillary W or TS observations isgenerally advantageous for the more heavily vegetatedGA/AL transect. This lack of geographic consistencysuggests that considerable merit exists in future satellitemissions carrying multiple types of soil moisture re-trieval algorithms forward in their data stream. Morecareful analysis will be required to confirm these re-sults. Nevertheless, they provide an example of the typeof retrieval algorithm design feedback afforded by theapproach. For this preliminary analysis, our test bed islimited to two transects in the southern United States.However, no practical barriers exist for expanding theapproach over broader precipitation data–rich areas ofNorth America, Europe, and Asia.
In closing, two caveats are worth noting. First, Rvalue
results presented here are based on a very simple APIland surface model. The approach could potentially bemodified such that (1) is replaced by a more physicallyrealistic land surface model. Such a modification wouldallow for consideration of a wider range of land surfacemodeling error and not simply the impact of precipita-tion uncertainty. However, with increased modelingcomplexity also comes greater ambiguity concerningthe interpretation of data assimilation results, a needfor a more complex data assimilation approach, and,ultimately, more technical and practical barriers for theadoption of the methodology by remote sensing datasetdevelopers and users. Future work will address the im-pact of more complex land surface modeling method-ologies and potential trade-offs between model com-plexity and the tractability of the approach.
Finally, it is important to note that this approach isintended to complement, not replace, traditional vali-dation techniques for remotely sensed soil moisture.The approach is somewhat application dependent in itsemphasis on land surface modeling and, consequently,would not likely fully satisfy current NASA or Euro-pean Space Agency programmatic requirements for re-mote sensing product validation. However, by usingmore easily acquired ground-based rainfall measure-ments as an effective proxy for less widely available soilmoisture measurements, it expands our ability to ob-jectively assess—and ultimately improve—the qualityof spaceborne soil moisture products.
Acknowledgments. The author would like to thankthe creators of the soil moisture products examined inthis article: Eric Wood (Princeton University), Huilin
Gao (Princeton University/Georgia Institute of Tech-nology), Matthias Drusch (ECMWF), Thomas Jackson(USDA ARS), Rajat Bindlish (USDA ARS/SSAI),and Eni Njoku (CIT-JPL) for providing access to theirdatasets. Additional data support from Xiwu Zhan(USDA ARS), Brian Cosgrove (NASA GSFC), StevenMargulis (UCLA), the NLDAS project, and NCEP isgratefully acknowledged.
REFERENCES
Bindlish, R., T. J. Jackson, E. F. Wood, H. Gao, P. Starks, D.Bosch, and V. Lakshmi, 2003: Soil moisture estimates fromTRMM Microwave Imager observations over the southernUnited States. Remote Sens. Environ., 85, 507–515.
Cosgrove, B. A., and Coauthors, 2003: Real-time and retrospec-tive forcing in the North American Land Data AssimilationSystem (NLDAS) project. J. Geophys. Res., 108, 8842,doi:10.1029/2002JD003118.
Cosh, M. H., T. J. Jackson, R. Bindlish, and J. H. Prueger, 2004:Watershed scale temporal persistence of soil moisture and itsrole in validating satellite estimates. Remote Sens. Environ.,92, 427–435.
Crow, W. T., R. Bindlish, and T. J. Jackson, 2005a: The addedvalue of spaceborne passive microwave soil moisture retriev-als for forecasting rainfall-runoff partitioning. Geophys. Res.Lett., 32, L18401, doi:10.1029/2005GL023543.
——, R. D. Koster, R. H. Reichle, and H. O. Sharif, 2005b: Rel-evance of time-varying and time-invariant retrieval errorsources on the utility of spaceborne soil moisture products.Geophys. Res. Lett., 32, L24405, doi:10.1029/2005GL024889.
Dee, D. P., 1995: On-line estimation of error covariance param-eters for atmospheric data assimilation. Mon. Wea. Rev., 123,1128–1145.
Drusch, M., E. F. Wood, and T. J. Jackson, 2001: Vegetation andatmospheric corrections for the soil moisture retrieval frompassive microwave remote sensing data: Results from the1997 Southern Great Plains Hydrology Experiment. J. Hy-drometeor., 2, 181–192.
Famiglietti, J. S., and Coauthors, 1999: Ground-based investiga-tion of soil moisture variability within remote sensing foot-prints during the Southern Great Plains (SGP97) HydrologyExperiment. Water Resour. Res., 35, 1839–1851.
Gao, H., E. F. Wood, M. Drusch, W. T. Crow, and T. J. Jackson,2004: Using a microwave emission model to estimate soilmoisture from ESTAR observations during SGP99. J. Hy-drometeor., 5, 49–63.
——, ——, ——, T. Jackson, and R. Bindlish, 2006: Using TRMM/TMI to retrieve soil moisture over the southern United Statesfrom 1998 to 2002. J. Hydrometeor., 7, 23–38.
Groisman, P. Y., and D. R. Legates, 1994: The accuracy of UnitedStates precipitation data. Bull. Amer. Meteor. Soc., 75, 215–227.
Huffman, G. J., R. F. Adler, M. M. Morrissey, D. T. Bolvin, S.Curtis, R. Joyce, B. McGavock, and J. Susskind, 2001: Globalprecipitation at one-degree daily resolution from mulitisatel-lite observations. J. Hydrometeor., 2, 36–50.
Jackson, T. J., D. M. Le Vine, A. Y. Hsu, A. Oldak, P. J. Starks,C. T. Swift, J. Isham, and M. Haken, 1999: Soil moisture map-ping at regional scales using microwave radiometry: The
66 J O U R N A L O F H Y D R O M E T E O R O L O G Y VOLUME 8

Southern Great Plains Hydrology Experiment. IEEE Trans.Geosci. Remote Sens., 37, 2136–2151.
Jacobs, J. M., B. P. Mohanty, E. C. Hsu, and D. Miller, 2004: Fieldscale variability and similarity of soil moisture. Remote Sens.Environ., 92, 436–446.
Kerr, Y. H., P. Waldteufel, J.-P. Wigneron, J.-M. Martinuzzi, J.Font, and M. Berger, 2001: Soil moisture retrieval fromspace: The soil moisture and ocean salinity mission (SMOS).IEEE Trans. Geosci. Remote Sens., 39, 1729–1735.
Leese, J., T. J. Jackson, A. Pitman, and P. Dirmeyer, 2001:GEWEX/BAHC international workshop on soil moisturemonitoring, analysis and prediction for hydrometeorologicaland hydroclimatological applications. Bull. Amer. Meteor.Soc., 82, 1423–1430.
McPhee, J., and S. Margulis, 2005: Validation and error charac-terization of GPCP-1DD precipitation product over the con-tiguous United States. J. Hydrometeor., 6, 441–459.
Njoku, E. G., T. J. Jackson, V. Lakshmi, T. Chan, and S. V.Nghiem, 2003: Soil moisture retrieval from AMSR-E. IEEETrans. Geosci. Remote Sens., 41, 215–229.
Reichle, R. H., and R. D. Koster, 2005: Global assimilation ofsatellite surface soil moisture retrievals into the NASACatchment land surface model. Geophys. Res. Lett., 32,L02404, doi:10.1029/2004GL021700.
——, D. B. McLaughlin, and D. Entekhabi, 2002: Hydrologic dataassimilation with the ensemble Kalman filter. Mon. Wea.Rev., 130, 103–114.
FEBRUARY 2007 C R O W 67