a cpm-goms-model of lane changes on highways cpm-goms-model of lane changes on highways.pdf · a...
TRANSCRIPT

A CPM-GOMS-model of lane changes on highways
David KäthnerKlas IhmeMeike Jipp
Drive-GOMS > David Käthner > 23.03.2016DLR.de • Slide 1

1. Modelling of driver behaviour and distraction
2. A modelling workflow
3. Drive-GOMS
4. Empirical study
5. Motor operators
6. Outlook
Drive-GOMS > David Käthner > 23.03.2016
Agenda
DLR.de • Slide 2
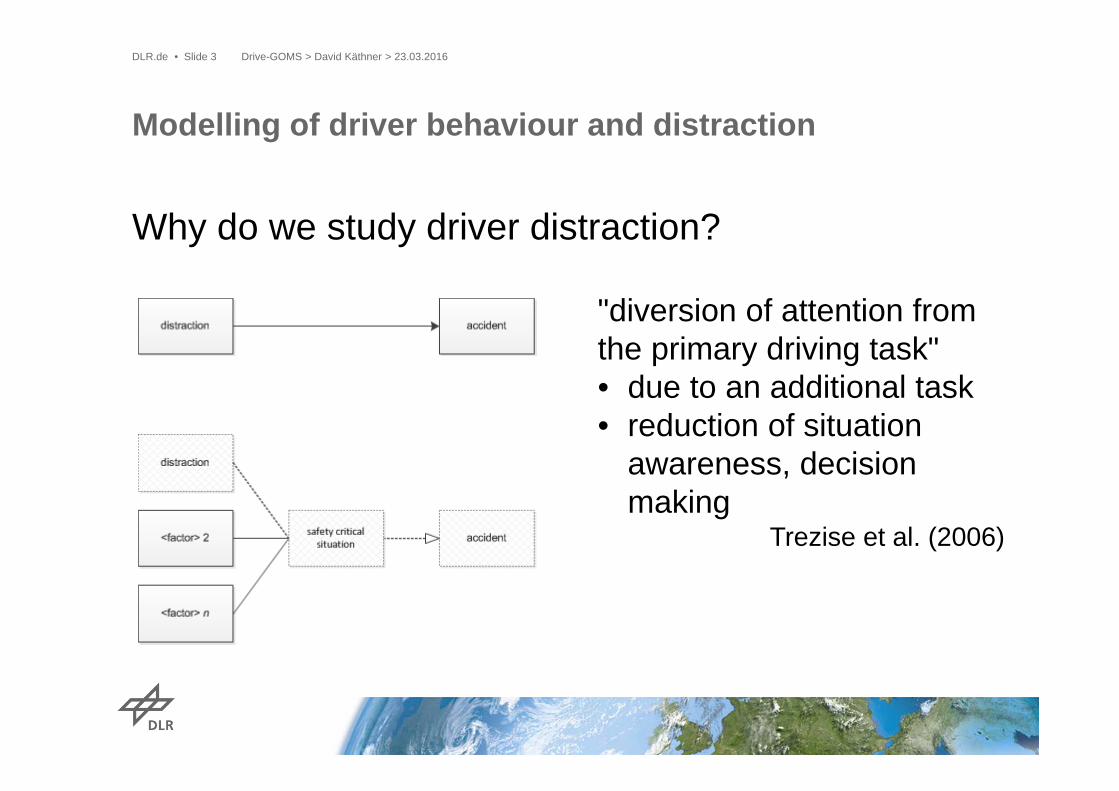
Why do we study driver distraction?
Drive-GOMS > David Käthner > 23.03.2016
Modelling of driver behaviour and distraction
"diversion of attention from the primary driving task"• due to an additional task• reduction of situation
awareness, decision making
Trezise et al. (2006)
DLR.de • Slide 3

Drive-GOMS > David Käthner > 23.03.2016
Modelling of driver behaviour and distraction
"Continental’s concept vehicle recognizes driver distraction and is able to direct the driver’s attention towards a dangerous situation."Quelle
Mitigating distraction
Ambient Light, Projekt "AdaptIVe", DLR 2016
DLR.de • Slide 4

Modelling of driver behaviour and distraction
Requirements The appropriate level of abstraction
quantitative predictions• computational• functional
usability• effective• efficient• you can learn it on your own
specific support for design of• driver information systems• vehicle automation• infrastructure
Drive-GOMS > David Käthner > 23.03.2016DLR.de • Slide 5
"Find the way from the main station to the TEAP."
There are no right or wrong models. Only useful / usable ones.

Drive-GOMS > David Käthner > 23.03.2016
Modelling workflow
framework: driving task and traffic system
task analysis
explorative study explorative task model
validated task modeltargeted study
cognitive + computational models
explorative study explorative task model
DLR.de • Slide 6

An example task
Drive-GOMS > David Käthner > 23.03.2016DLR.de • Slide 7

resource channelsystem latency-to-sound
Cognition prepare prepare validate
Perception aural listen
Motor left hand move press_down
time
Basic approach: CPM-GOMS
Drive-GOMS > David Käthner > 23.03.2016
CPM-GOMS
Card, Moran & Newell, 1983 / John & Kieras, 1996
DLR.de • Slide 8

Drive-GOMS > David Käthner > 23.03.2016
Empirical study
DLR.de • Slide 9
measuring vehicle "ViewCar"• recording of all vehicle data• 8 video cameras• eye- and headtracking with
Smart Eye Pro 6.1

Drive-GOMS > David Käthner > 23.03.2016
Empirical study
DLR.de • Slide 10
convenience sample:• me, my colleague, and a
student• 33 / 31 / 22 years• all sufficiently experienced
drivers
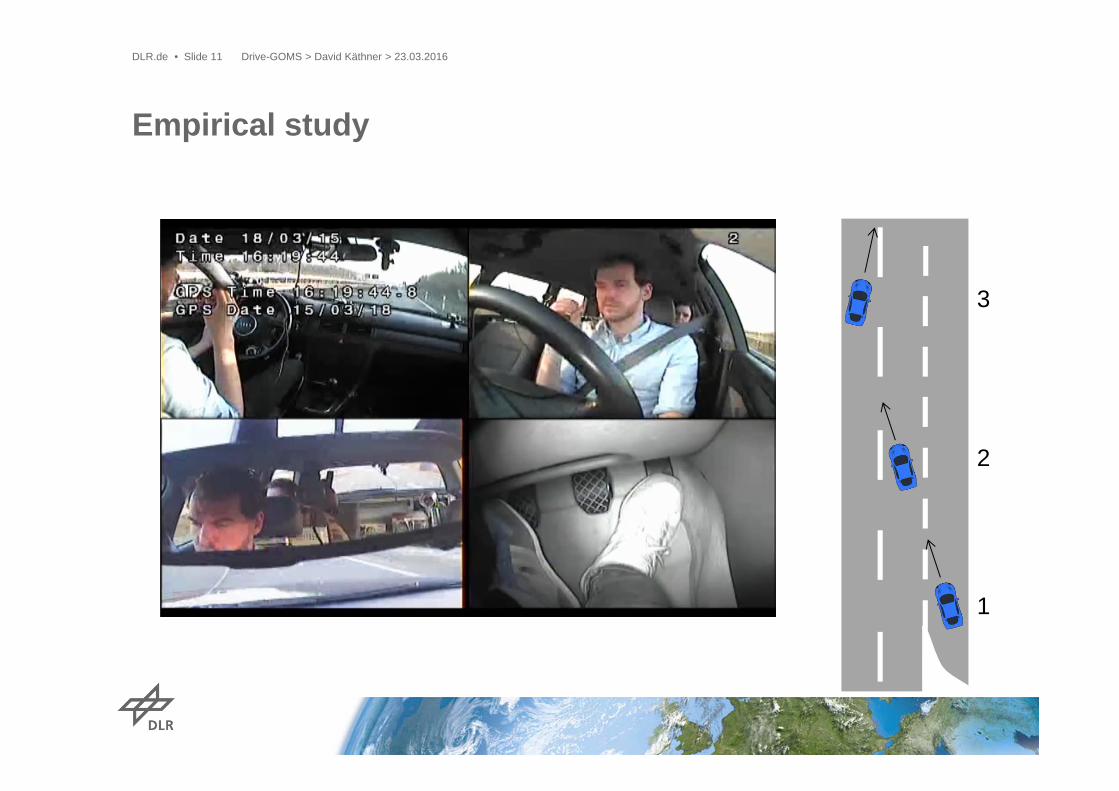
Empirical study
Drive-GOMS > David Käthner > 23.03.2016DLR.de • Slide 11
3
2
1

Drive-GOMS > David Käthner > 23.03.2016
Motor operators: Template
DLR.de • Slide 12
resource system unit operatorright_foot throttle rest
holdpress_downrelease
brake restholdpress_downrelease
floor rest<from>:<to> move
left_hand non_functional_unit reststeering_wheel turn_left
turn_righthold
indicator_lever prepare / be readyliftpress tap_uptap_down
<from>:<to> move

automation and extension• simulator study with fixed situations• automated motor operator coding
Outlook: Drive-GOMS
Drive-GOMS > David Käthner > 23.03.2016DLR.de • Slide 13
goals cognitive operators
perceptive operators
validation
1
2
scene representation
What if you could seewhat your model does?
"[To do] predictive human perfomance modeling (...), the real bottleneck is in the task analysis process. (...) What is missing, and badly needed, is a demonstration that one can start with a conventional task analysis (...) and then proceed systematically to a usefully accurate computational cognitive model, with no 'hand-waving' in between."
Drive-GOMS > David Käthner > 23.03.2016
Will it work? We have to try!
DLR.de • Slide 14
David Kieras & David Meyerauthors of the EPIC cognitive architecture

Drive-GOMS > David Käthner > 23.03.2016DLR.de • Slide 15
Thank you for your attention!

Requirements
domain specific GOMS• measurements for operators• systematic relation to system elements• integration of goals • methods and selection rulesusability• documented procedure for modelling of goals, cognitive and perceptual
operators• suitable statistical procedures to identify operator sequencesvalidation• procedures for validation• metrics for validation
Drive-GOMS > David Käthner > 23.03.2016
Drive-GOMS
DLR.de • Slide 16