1 dr. peter avitabile, assistant professor mechanical engineering department shock isolation...
Post on 19-Dec-2015
224 views
TRANSCRIPT
1 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
Shock Isolation of Equipmentusing
Acceleration/Displacement Sensors
2 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
Problem
Mechanical equipment is subjected to a variety of different loading that must be considered in the design process
DROP LOADS
MISC LOADS
OPERATING LOADS
TRANSPORTATION LOADS
3 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
Problem
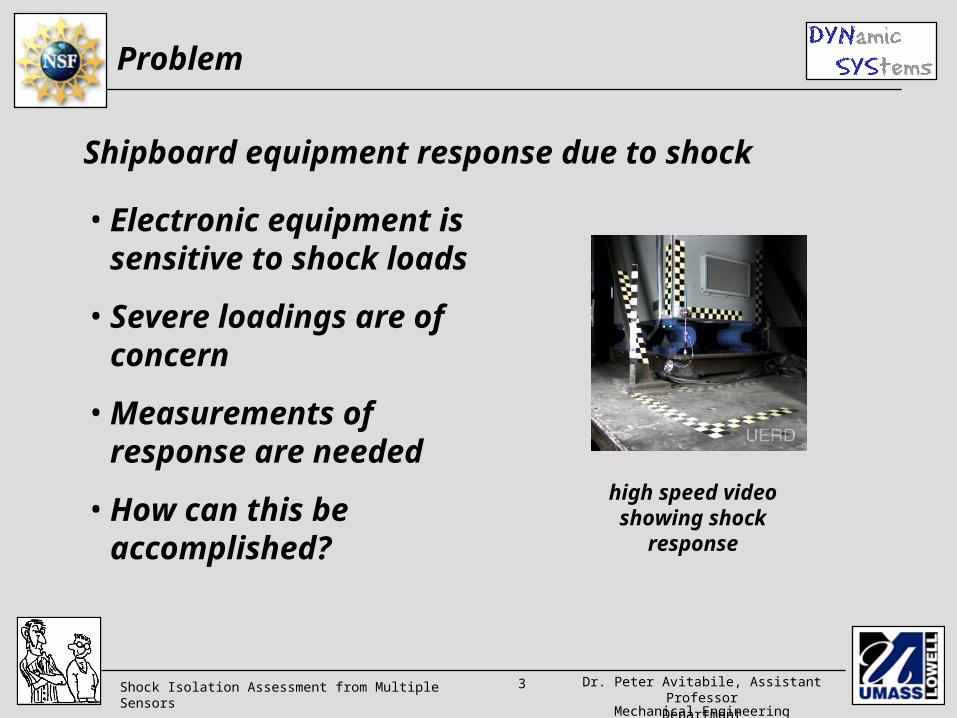
•Electronic equipment is sensitive to shock loads
•Severe loadings are of concern
•Measurements of response are needed
•How can this be accomplished?
Shipboard equipment response due to shock
high speed video
showing shock response
4 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
Dynamic Response Considerations
•Measurements of both acceleration and displacement need to be obtained
•Various transducers are available for measurement of response
•Numerical evaluation of data required
Assessing Shock Response from Multiple Sensors
5 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
Measurement Considerations
•Response due to shock needs to be determined
•Measurements of displacement and acceleration using accelerometers and LVDTs are options for transducer selections
Assessing Shock Response from Multiple Sensors
6 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
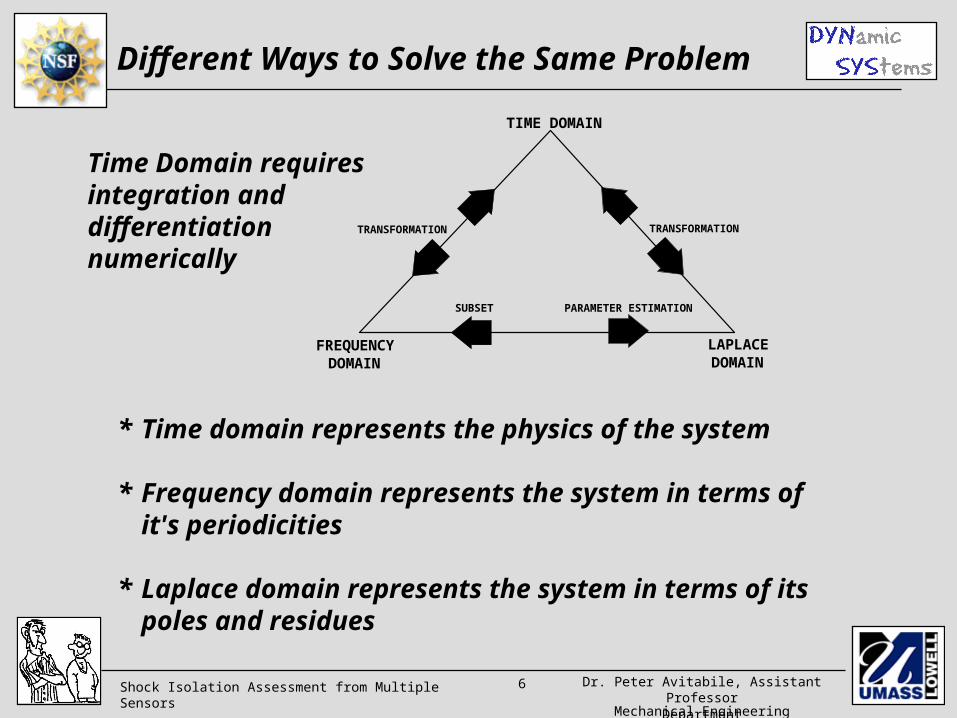
Different Ways to Solve the Same Problem
TIME DOMAIN
FREQUENCYDOMAIN
LAPLACEDOMAIN
TRANSFORMATION TRANSFORMATION
PARAMETER ESTIMATIONSUBSET
* Time domain represents the physics of the system
* Frequency domain represents the system in terms of it's periodicities
* Laplace domain represents the system in terms of its poles and residues
Time Domain requires integration and differentiation numerically
7 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
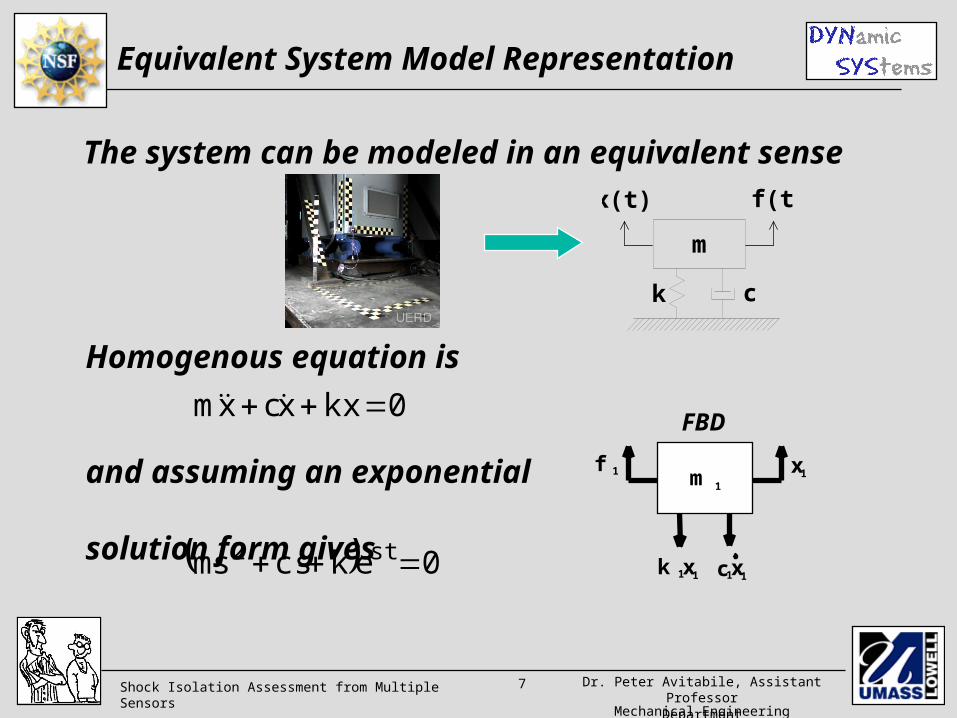
Equivalent System Model Representation
The system can be modeled in an equivalent sense
m
k c
x(t) f(t)
f 1 x1
k 1x1 c1x1
m 1
Homogenous equation is
and assuming an exponential solution form gives
0kxxcxm
0ekcsms st2
FBD
8 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
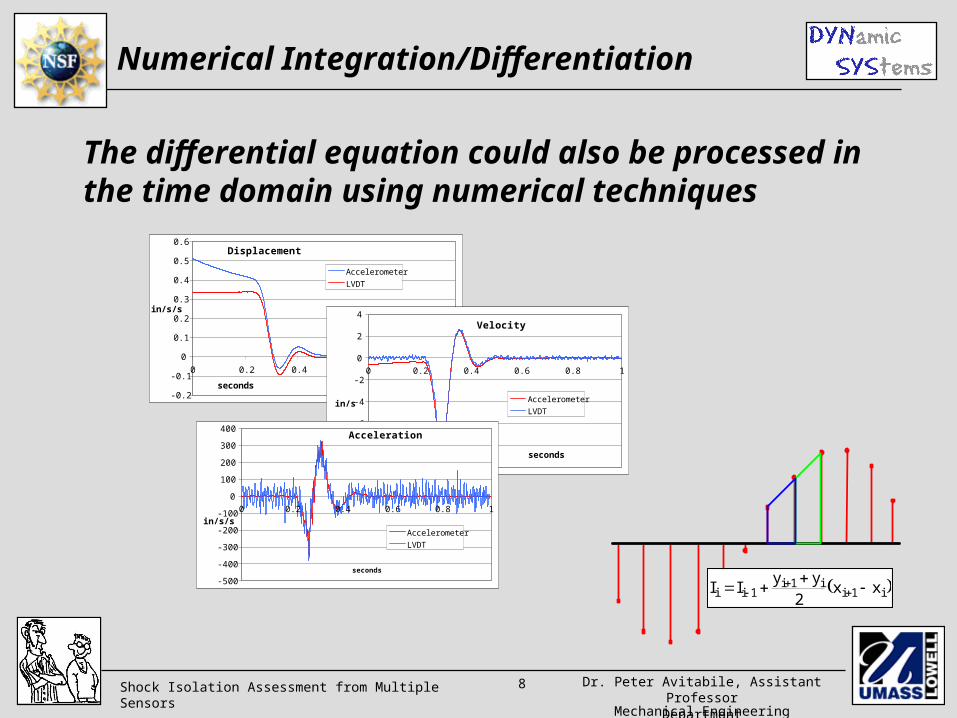
Numerical Integration/Differentiation
The differential equation could also be processed in the time domain using numerical techniques
i1ii1i
1ii xx2
yyII
Displacement
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0 0.2 0.4 0.6 0.8 1
seconds
in/s/s
Accelerometer
LVDT
Velocity
-10
-8
-6
-4
-2
0
2
4
0 0.2 0.4 0.6 0.8 1
seconds
in/s Accelerometer
LVDT
Acceleration
-500
-400
-300
-200
-100
0
100
200
300
400
0 0.2 0.4 0.6 0.8 1
seconds
in/s/sAccelerometer
LVDT
9 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
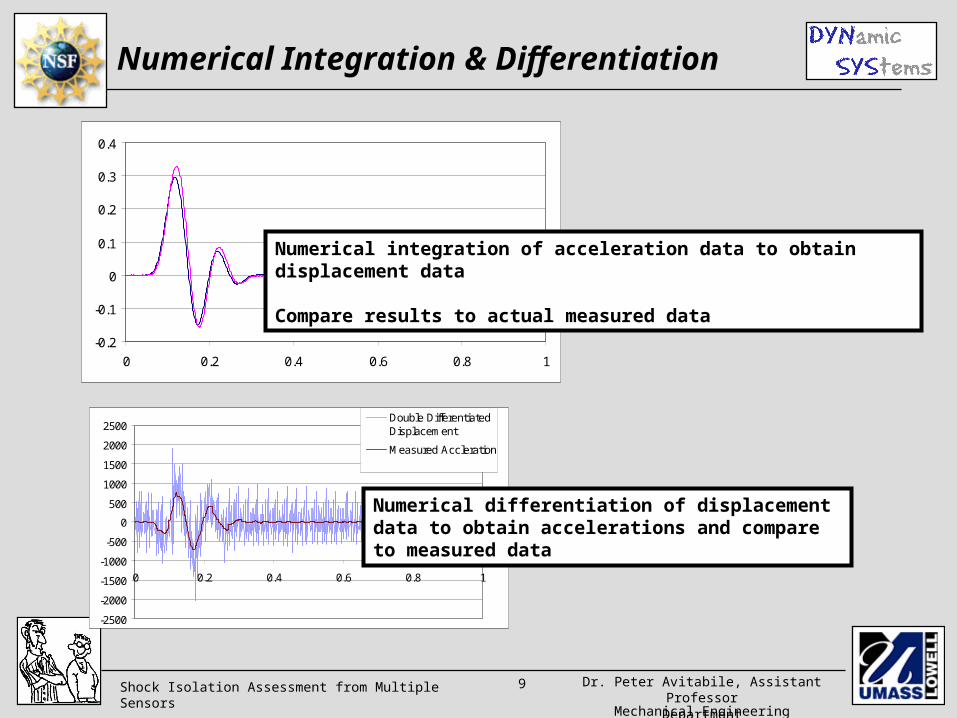
Numerical Integration & Differentiation
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0 0.2 0.4 0.6 0.8 1
Numerical integration of acceleration data to obtain displacement data
Compare results to actual measured data
-2500
-2000
-1500
-1000
-500
0
500
1000
1500
2000
2500
0 0.2 0.4 0.6 0.8 1
Double DifferentiatedDisplacement
Measured Accleration
Numerical differentiation of displacement data to obtain accelerations and compare to measured data
10 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
Evaluation of Measurement Locations
•Strength of Materials (structural characteristics)
•Dynamics (mass, inertia properties)
•ME Lab (digital data acquisition)
•Numerical Methods (integration, differentiation)
•Math (ODE, Laplace, Fourier Series)
Need to know ………
11 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
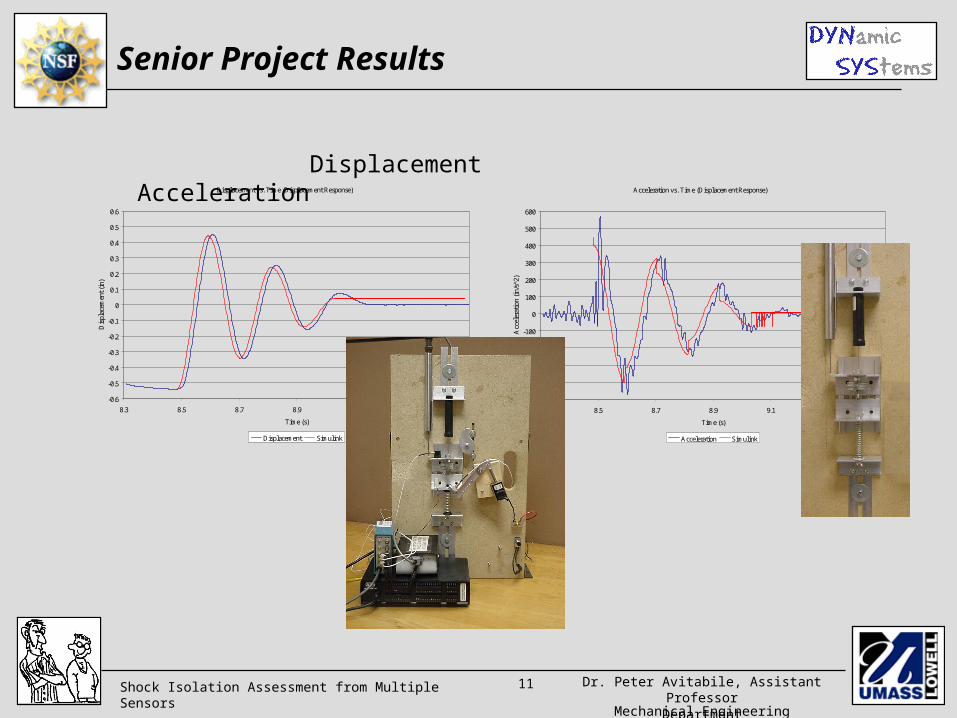
Senior Project Results
Displacement vs. Time (Displacement Response)
-0.6
-0.5
-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
8.3 8.5 8.7 8.9 9.1 9.3 9.5
Time (s)
Dis
plac
emen
t (in
)
Displacement Simulink
Acceleration vs. Time (Displacement Response)
-500
-400
-300
-200
-100
0
100
200
300
400
500
600
8.3 8.5 8.7 8.9 9.1 9.3 9.5
Time (s)
Acc
eler
atio
n (i
n/s^
2)
Acceleration Simulink
Displacement Acceleration
12 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
Skill Sets Needed
•Must have a firm understanding of underlying math related to problem
•Computer software helps provide solution to underlying mathematical formulation
•Upper level students are expected to have a firm understanding of basics to solve the problem
•Engineers utilizing tools to solve critical problems clearly must understand the basic underlying mathematical principles involved
Numerical methods used in problem evaluation
13 Dr. Peter Avitabile, Assistant Professor
Mechanical Engineering Department
Shock Isolation Assessment from Multiple Sensors
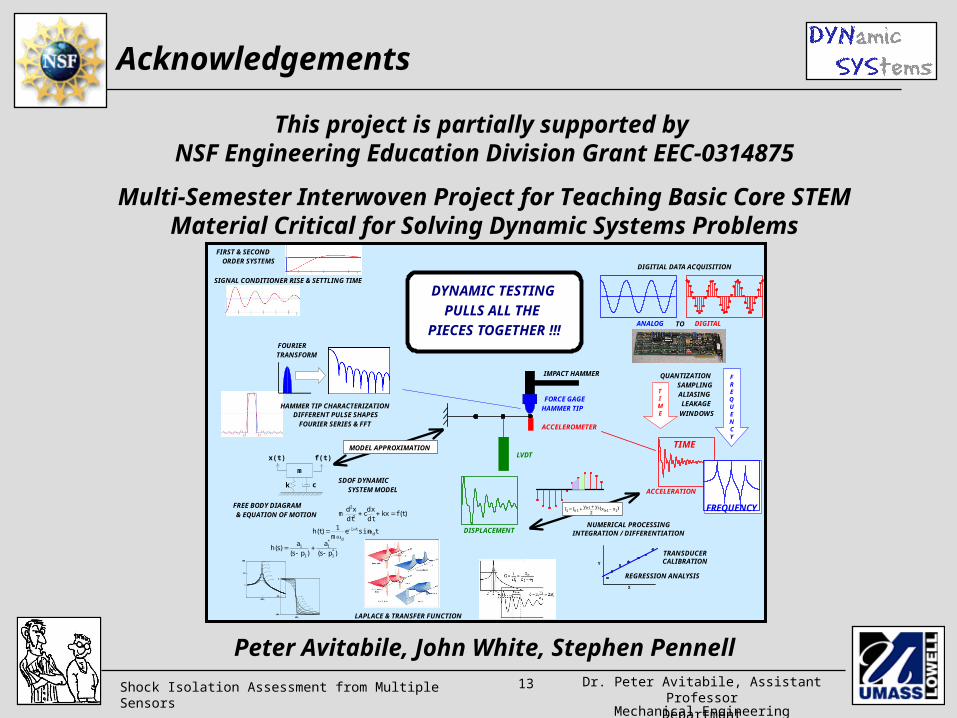
This project is partially supported by NSF Engineering Education Division Grant EEC-0314875
Multi-Semester Interwoven Project for Teaching Basic Core STEM Material Critical for Solving Dynamic Systems
Problems
Peter Avitabile, John White, Stephen Pennell
Acknowledgements
TIME
FREQUENCY
ACCELEROMETER
IMPACT HAMMER
FORCE GAGEHAMMER TIP
FOURIERTRANSFORM
LVDT
DISPLACEMENT
ACCELERATION
DIGITALANALOG TO
DIGITIAL DATA ACQUISITION
NUMERICAL PROCESSINGINTEGRATION / DIFFERENTIATION
i1ii1i
1ii xx2
yyII
QUANTIZATIONSAMPLINGALIASINGLEAKAGE
WINDOWS
DYNAMIC TESTINGPULLS ALL THE
PIECES TOGETHER !!!
TIME
FREQUENCY
X
Y
TRANSDUCERCALIBRATION
REGRESSION ANALYSIS
HAMMER TIP CHARACTERIZATION
FOURIER SERIES & FFT
m
k c
x(t) f(t)
SDOF DYNAMIC
MODEL APPROXIMATION
SYSTEM MODEL
100
10
1
n
0
-90
-180n
)t(fxkdt
dxc
dt
xdm 2
2
DIFFERENT PULSE SHAPES
)ps(
a
)ps(
a)s(h *
1
*1
1
1
FREE BODY DIAGRAM& EQUATION OF MOTION
LAPLACE & TRANSFER FUNCTION
tsinem
1)t(h dt
d
FIRST & SECOND ORDER SYSTEMS
SIGNAL CONDITIONER RISE & SETTLING TIME