web sections, web chapters and solution appendix
DESCRIPTION
algebraTRANSCRIPT

H. E. Rose
A COURSE ON
FINITE GROUPS
Web Sections, Web Chapters and
Solution Appendix
Springer

322
TABLE OF Web Sections
The material presented in this Web Site is additional to that given in themain text – A Course on Finite Groups. It consists of extra sections tosome of the chapters with in most cases a set of supplementary problems,two extra chapters providing an introduction to group representation theory,and a long Appendix giving solutions, ranging from brief hints to completeanswers, to all of the problems listed in the main text. Chapter, section,definition, theorem, problem and equation numbers all follow on from thosegiven in the main text. In fact these Web Sections could be printed, andthen slotted into the main text at the appropriate places allowing for thenon-consecutive page numbers. Again it is a pleasure to thank Ben Fairbairnfor commenting on and improving the text.
Web Section 3.6 Representations of A5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325
3.7 Problems 3W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
Web Section 4.6 The Transfer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 331
4.7 Group Presentation, Part 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335
4.8 Problems 4W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 347
Web Section 5.4 Transitive and Primitive Permutation Groups, Iwasawa’sLemma . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .351
5.5 Problems 5W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 358
Web Section 6.5 Further Applications. Burnside’s Normal ComplementTheorem, Groups with Cyclic Sylow Subgroups . . . . . . . . . . . . . . . . . . . . . . . . 361
6.6 Problems 6W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 369
Web Section 7.5 Infinite Abelian Groups. A Brief Introduction . . . . . . 371
Web Section 9.4 Schur-Zassenhaus Theorem . . . . . . . . . . . . . . . . . . . . . . . . 377
9.5 Problems 9W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384

324
Web Section 12.6 Simple Groups of Order less than 1000000, a secondproof of the Simplicity of the Groups Ln(q), and a method for generatingSteiner Systems for some Mathieu Groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 387
12.7 Problem 12W . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
Web Chapter 13 Representation and Character Theory . . . . . . . . 401
13.1 Representations and Modules . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 402
13.2 Theorems of Schur and Maschke . . . . . . . . . . . . . . . . . . . . . . . . . . 408
13.3 Characters and Orthogonality Relations . . . . . . . . . . . . . . . . . . .412
13.4 Lifts and Normal Subgroups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 422
13.5 Problems 13 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 427
Web Chapter 14 Character Tables and Theorems of Burnside andFrobenius . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 433
14.1 Character Tables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 434
14.2 Burnside’s prqs-theorem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 440
14.3 Frobenius Groups . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 444
14.4 Problems 14 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 455
14.5 Appendix on Algebraic Integers . . . . . . . . . . . . . . . . . . . . . . . . . . . 459
Web Solution Appendix Answers and Solutions, Problems 2 . . . . . . . . 461
Problems 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 472
Problems 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 481
Problems 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 489
Problems 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 497
Problems 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 508
Problems 8 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 515
Problems 9 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 521
Problems 10 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 524
Problems 11 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 532
Problems 12 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 538
Problems A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 544
Problems B . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 545
Subgroup lattice diagrams for Groups of Order 8, 12 or 16 . . . . . . . . . 547
Addendum . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559

3.6 Representations of A5 325
3.6 Representations of A5
At the beginning of this chapter we noted that most groups have severaldistinct representations; to illustrate this fact we discuss here some repre-sentations of A5. In Section 3.2 we introduced A5 as the group of all evenpermutations on a five element set. It can also be (indirectly) specified as theonly non-Abelian simple group up to isomorphism of order less than 100,1
see Problem 6.15.
The group A5 has a number of presentations, three are as follows:
P1 : 〈a, b | a3 = b5 = (ab)2 = e〉,P2 : 〈a, b | a5 = b5 = (ab)2 = (a4b)3 = e〉,P3 : 〈a, b, c | a3 = b3 = c3 = (ab)2 = (bc)2 = (ca)2 = e〉.
To show that each of these presentations do in fact define A5 we can argue asfollows. Consider P1. We associate permutations in A5 (treating A5 as a per-mutation group) with each generator and then show that the correspondingrelations hold. This shows that a copy of A5 is a factor of P1. Secondly, weshow that P1 has 60 elements and this will be done in Problem 3.26. Similararguments are required for P2 and P3. For P1 set
a 7→ (1, 4, 2) and b 7→ (1, 2, 3, 4, 5), then ab = (1, 5)(3, 4).
It is immediately clear that the relations of P1 are satisfied. For P2 we set
a 7→ (2, 1, 3, 4, 5) and b 7→ (1, 2, 3, 4, 5), then
ab = (1, 4)(3, 5) and a4b = (1, 3, 2),
and for P3 we set
a 7→ (1, 2, 3), b 7→ (1, 2, 4) and c 7→ (1, 2, 5),
note that (1, 2, j)(1, 2, k) = (1, k)(2, j) if j, k > 2 and j 6= k.
The group A5 also has a number of matrix representations, we give twohere and one more in Problem 3.27, further representation examples can befound in the Atlas (1985). First we show that SL2(4) is one such represen-tation. This group is defined as the set of all 2× 2 matrices A with detA = 1defined over the 4-element field F4, see Section 3.3. Let the elements of F4 be
0, 1, c and c+ 1, where 1 + c+ c2 = 0,
and we work ‘modulo 2’, that is 1 + 1 = c+ c = 0 and c2 = c+ 1; see Section12.2. Using the presentation P3, we set
a 7→(
1 11 0
), b 7→
(1 c+ 1c 0
)and c 7→
(1 c
c+ 1 0
),
1 In fact, it is the only non-Abelian simple group of order less than 168, see Chapter 12.

326 3 Group Constructions and Representations
then
ab =
(c+ 1 c+ 1
1 c+ 1
), bc =
(c+ 1 cc c+ 1
)and ca =
(c+ 1 1c+ 1 c+ 1
).
We leave it as an exercise for the reader to show that these matrices satisfythe relations in P3, and that this system contains 60 matrices.
Our second matrix representation is L2(5) which is defined as follows.Working over the 5-element field (that is working ‘modulo 5’), we take SL2(5)and factor out its centre. The process of forming a factor group is definedChapter 4. The centre of SL2(5) is {
(1 00 1
),(−1 00 −1
)}, see Problem 3.19; hence
we work in SL2(5) and treat(a bc d
)and
(−a −b−c −d
)as the ‘same’ matrix. Formally,
the elements of L2(5) are the cosets of Z(SL2(5)) in the group SL2(5). Notethat −1 ≡ 4(mod 5) et cetera. Using the presentation P2 above, we set
a 7→(
1 03 1
)and b 7→
(4 11 3
),
then
ab 7→(
4 13 1
)and a4b 7→
(4 14 0
),
and it is a simple matter to show that the relations of P2 are satisfied. Thechoice of matrices and permutations above do satisfy the required conditionsbut are definitely not unique; as an exercise the reader should find some otherexamples.
Another representation of A5 is as the rotational symmetry group ofa dodecahedron. A dodecahedron is a regular solid structure with twelveregular equal-sized plane pentagonal faces with edges of equal length. Thisstructure has three types of rotational symmetry: (i) rotation about a linedrawn through the centres of opposite faces, this has order 5 as the facesare regular and have five edges; (ii) rotation about opposite vertices, in thisstructure three pentagonal faces meet at a vertex, and so this symmetry hasorder 3; and (iii) rotation about the centres of opposite edges, this has order2. Now using the presentation P1 above, if we associate a symmetry of type(ii) with a and a symmetry of type (i) with b, then a symmetry of type (iii)is associated with ab. To see this the reader should obtain a model of andodecahedron and try it! It is now easily seen that the relations of P1 aresatisfied, and (with some patience) that there are 60 symmetries in all. Anexcellent film, made by the Open University for their second year course inpure mathematics, illustrates this isomorphism clearly.
The group A5 can also be treated as the rotational symmetry group of aicosahedron. An icosahedron I is a regular solid with 20 identical equilateraltriangular faces and it can be inscribed in a dodecahedron D by taking thevertices of I as the centres of the faces of D. This process is self-inverse forwe can also inscribe a dodecahedron inside an icosahedron using the samemethod. This latter representation of A5 is the one that has been used by

3.7 Problems 3W 327
some chemists to describe the structure of the carbon molecule Carbon60,see page 24.
The Atlas (1985) gives some more representations of A5, for exampleas unitary groups defined over the fields F16 or F25. Also this group occursas maximal subgroups of a number of simple groups, for example A6, L2(k)where k = 11, 16, 19, 29 and 31, and the Janko group J2 (sometimes calledthe Hall-Janko group). Further details are given in Chapter 12, the Atlas(1985), and the ‘online’ Atlas.
3.7 Problems 3W
Problem 3.25 (An Example of a Free Group) A linear fractional trans-formation f of the complex plane C to itself is a map of the form
fa,b,c,d(z) =az + b
cz + dwhere ad− bc 6= 0 for a, b, c, d ∈ C.
(i) Show that the mapping(a bc d
)7→ fa,b,c,d
is a homomorphism (see Section 4.1) from GL2(C) to the group of all linearfractional transformations.
(ii) Show that the matrices A =(1 02 1
)and B =
(1 20 1
)generate a free
subgroup in the group of all linear fractional transformations. (Hint. Considerthe effect on points inside and outside the unit circle in the complex plane.)
Problem 3.26? Let G = 〈a, b | a3 = b5 = (ab)2 = e〉; see page 325. Showthat G has at most 60 elements using the following method, see Passman(1968, page 120). Clearly if H = 〈b〉, then o(H) = 5 and H ≤ G. Considerthe following set of twelve cosets of H in G (we are not assuming that theyare distinct, but in fact they are).
H Ha2 Ha2ba Ha2b2 Ha2b2a2 Ha2b2a2baHa Ha2b Ha2ba2 Ha2b2a Ha2b2a2b Ha2b2a2ba2
.
Further, let H? denote the union of these twelve cosets. Now if H1 ∈ H?,then H1a ∈ H? as a3 = e. By considering each coset in turn, show that ifH1 ∈ H? then H1b ∈ H?. Deduce H?G = H?, and so prove the result.
Problem 3.27 Working over the complex field C, let z be a primitivefifth-root of unity, that is z5 = 1 and z 6= 1. Note that
2(z + z4) = −1 +√
5 and 2(z2 + z3) = −1−√
5.

328 3 Group Construction and Representation
Further let
A =
(1 0 00 z 00 0 z4
), B =
1
2√
5
2 4 42 −1−
√5 −1 +
√5
2 −1 +√
5 −1−√
5
.
(i) Show that A5 = B2 = (AB)3 = I3, and so using Problem 3.26 showthat 〈A,B〉 ' A5. Note that the presentation suggested here is closely relatedto the presentation P1 given on page 325.
(ii) Give representatives of the conjugacy classes.
We shall return to this example in Web Section 14.1.
Problem 3.28 (Properties of A6) (i) Our first representation of A6 isas the group of even permutations on the set X = {1, 2, 3, 4, 5, 6}. It also hasthe following two presentations:
〈a, b | a5 = b5 = (ab)2 = (a4b)4 = e〉,
and〈c, d | c5 = d3 = (cd)4 = [c, d] = e〉,
where the square brackets denotes the commutator. Note the similarity ofthe first of these presentations with the presentation P2 for A5 given on page325. Show that each of these presentations is valid for A6 using the followingmethod. Begin by showing that if we set
a 7→ (1, 2, 3, 4, 5) and b 7→ (1, 4, 6, 3, 2)
then a and b satisfy the first set of relations, and if we set
c 7→ (1, 2, 3, 4, 5) and d 7→ (4, 5, 6)
then c and d satisfy the second set. Now show that b can be expressed interms of c and d, and also d can be expressed in terms of a and b, and usethese facts to establish these presentations.
(ii) Show that the group G = 〈(1, 2)(3, 4), (1, 2, 3)(4, 5, 6)〉 is a subgroupof A6 using one of the presentations of A5 given in this section.
(iii) By trial show that the group G given in (ii) is doubly transitiveon {1, 2, 3, 4, 5, 6}, that is for every pair of two-element subsets of X: Xi ={xi1, xi2} ⊆ X, there exists σ ∈ G with the properties x11σ = x21 andx12σ = x22.
(iv) How many copies of A5 occur as subgroups in A6?
See also Problems 4.20 and 12.4(ii).
Problem 3.29 (i) Show that if n > 2, then every index n subgroup in Anis isomorphic to An−1. (Hint. Use Theorem 5.15 and the example on page192.)

3.7 Problems 3W 329
(ii) Use (i) to show that if G is a non-Abelian simple group with order 60,then G ' A5. The method is as follows. Using Theorem 5.15 and the Sylowtheory (for the prime 5) to show that G can be embedded in S6, then use (i)and Problem 3.7(ii).
Problem 3.30 Suppose σ ∈ Sn has the cyclic decomposition
σ = (a1, . . . , ai1)(b1, . . . , bi2) . . . (c1, . . . , cin).
Let ξσ, a product of 2-cycles, be defined by
ξσ = (a2, ai1)(a3, ai1−1) . . . (aj1 , ak1)(b2, bi2)(b3, bi2−1) . . . (cjn , ckn),
where no 2-cycle is present if ir = 2 (that is if the rth cycle in σ is a 2-cycle),and
jr = [ir/2] and kr = jr + 2 if ir is even
jr = [ir/2] + 1 and kr = jr + 1 if ir is odd,
where the square brackets denote integer part. The term ξσ is called thestandard conjugator for σ.
(i) Show that ξ−1σ σξσ = σ−1.
(ii) A group G is called ambivalent if each element of G is a conjugate ofits inverse. Prove that
(a) Sn is ambivalent for all n,
(b) An is ambivalent if, and only if, n = 1, 2, 5, 6, 10 or 14.
(Hint. See Theorem 3.12 and Problems 3.3 and 5.25, and for (b) consider thefollowing cases where τ ∈ Sn
if n = 4r, then τ is a (4r − 1)-cycle × 1-cycle;
if n = 4r + 1 and r > 1, then τ is a (4r − 3)-cycle × 3-cycle;
if n = 4r + 2 and r > 3, then τ is a (4r − 7)-cycle × 5-cycle × 3-cycle× 1-cycle;
if n = 4r + 3, then τ is an n-cycle.)
One application of ambivalence is related to the character theory of the groupin question, for if G is ambivalent then all of the irreducible characters of Gare entirely real-valued; a stronger result holds for symmetric groups, see WebChapter 13.
Problem 3.31 (An Infinite Simple Group) Let SN denote the group ofall permutations of the positive integers N. If σ ∈ SN let
z(σ) = {n ∈ N : nσ 6= n},
so z(σ) equals the set of integers moved by σ, note that this set may be finiteor infinite.
330 3 Group Construction and Representation
(i) For σ, τ ∈ SN show that (a) z(σ−1) = z(σ), (b) z(στ) ⊆ z(σ)∪z(τ),(c) z(σ−1τσ) = {nσ : n ∈ z(τ)}, and (d) if z(σ) ∩ z(τ) = ∅ then σ and τcommute.
Now defineS(N) = {σ ∈ SN : o(z(σ)) <∞},
it is called the restricted symmetric group on N, and it contains those per-mutations that move only a finite number of elements of N.
(ii) Show that (a) S(N) / SN, (b) every element of S(N) has finite order,and (c) S(N) has infinitely many cosets in SN. In the notation of Chapter 4,the factor group SN/S(N) is infinite.
Further, for k = 1, 2, . . . , define
Sk(N) = {σ ∈ S(N) : nσ = n for all n > k}.
(iii) Show that, for all k, (a) Sk(N) < S(N), (b) Sk(N) ' Sk, (c) S1(N) < S2
(N) <
· · · < S(N), and (d)⋃∞k=1 S
k(N) = S(N).
Lastly define A1(N) = A2
(N) = 〈e〉, for k > 1 let Ak(N) denote the unique
subgroup of index 2 in Sk(N) (note we need to prove uniqueness), and let
A(N) =⋃∞
k=1Ak(N).
(iv) Prove that Ak(N) ' Ak, A1(N) < A2
(N) < · · · < A(N), and so deduce,
using Problem 2.30, A(N) is simple.
(v) As a corollary show that A(N) contains a subgroup isomorphic to theinfinite cyclic group Z.

4.6 The Transfer 331
4.6 The Transfer
In this section we define a new homomorphism called the transfer first intro-duced by Issai Schur to prove the result quoted in Problem 4.29. It providesan example of the construction of an actual homomorphism, and we shalluse it in Web Section 6.5 to prove Burnside’s Normal Complement Theorem(Theorem 6.23). We shall only consider the Abelian subgroup case; in thegeneral non-Abelian case, the subgroup H in the definition below is replacedby H/H ′; see for example Rose (1978) or Rotman (1994). Either case providesa useful exercise in the methods discussed in this chapter.
We begin with
Definition 4.24 For a group G and a subgroup H of finite index n, aset T containing exactly one representative from each left coset of H in G iscalled a transversal of H in G.
Notes. (a) If T = {a1, . . . , an} and T is a transversal of H in G, then
G =⋃n
i=1aiH,
where the dot denotes disjoint union. The transversal given by this definitionis, strictly speaking, a left transversal. Right transversals can also be definedbut we shall not need them, see Problem 4.24.
(b) By Lemma 2.22 an element ai ∈ T cannot belong to two distinct cosetsof G.
(c) In Chapter 9 we define a similar entity called the section which is a typeof transversal with an extra condition concerning the neutral element.
Before defining the transfer we need to establish some basic facts abouttransversals. See also Problem 4.23.
Lemma 4.25 Suppose H ≤ G, H is Abelian, [G : H] = n, g ∈ G, andT = {a1, . . . , an} is a transversal of H in G.
(i) There exists hr ∈ H and σ ∈ Sn that depend on g and satisfy
gar = arσhr for r = 1, . . . , n.
(ii) If {b1, . . . , bn} is another transversal of H in G, and so by (i) gbr = brνkrfor some kr ∈ H and ν ∈ Sn, then∏n
r=1hr =
∏n
r=1kr.
Proof. (i) As gar belongs to some left coset of H in G, we can findhr ∈ H and an integer sr to satisfy
gar = asrhr where 1 ≤ sr ≤ n and 1 ≤ r ≤ n.

332 4 Homomorphisms
To prove (i) we need to show that sr defines a permutation in Sn. It issufficient to show that sr is injective because an injection of a finite setto itself is also surjective (Problem A5 in Appendix A).
Suppose gar′ = asr′hr′ , for hr′ ∈ H, and sr = sr′ . Then we have
a−1r ar′ = (gar)−1(gar′) = (asrhr)
−1(asr′hr′) = h−1r hr′ ∈ H,
by assumption. Hence by Lemma 2.22, arH = ar′H which shows thatr = r′ because T is a transversal. Therefore the function s is injective,and so it is a bijection on {1, . . . , n}, that is a permutation belongingto Sn.
(ii) Set s = σ ∈ Sn. By (i) with g = e, there exist jr ∈ H and ϕ ∈ Snsatisfying br = arϕjr, for 1 ≤ r ≤ n. So using (i) again, and the identityarϕσ = arϕσϕ−1ϕ, we have
gbr = g(arϕjr) = (arϕσhrϕ)jr = brϕσϕ−1(jrϕσϕ−1)−1hrϕjr.
As ϕσϕ−1 ∈ Sn and (jrϕσϕ−1)−1hrϕjr ∈ H, we can set ν = ϕσϕ−1 and
kr = (jrϕσϕ−1)−1hrϕjr,
which gives gbr = brνkr as required. Hence, as H is Abelian, we obtain∏rkr =
∏r(jrϕσϕ−1)−1hrϕjr =
∏rj−1r
∏rhr∏
rjr =
∏rhr,
as ϕ, σ ∈ Sn, where the parameter r ranges from 1 to n in each product.The result follows. 2
Now using Lemma 4.25(ii) we can define the transfer which we shall seeis a homomorphism from G to H.
Definition 4.26 Let H be an Abelian subgroup of G with index n. Usingthe notation set up in Lemma 4.25, the function ξ : G→ H given by
gξ =∏n
r=1hr for all g ∈ G,
is called the transfer of H in G.
By Lemma 4.25(ii), this expression is independent of the coset representativeshr, and so it is a well-defined function.
Theorem 4.27 The transfer ξ : G→ H is a homomorphism.
Proof. Suppose g, h ∈ G, gar = arσjr and har = arνkr where{a1, . . . , an} is a transversal and σ, ν ∈ Sn; see above. Then
ghar = garνkr = arνσjrνkr,
and so, as H is Abelian,

4.6 The Transfer 333
ghξ =∏
rjrνkr =
∏rjr ·∏
rkr = gξ · hξ,
which proves the theorem. 2
Example. Let G = D4 = 〈a, b | a4 = b2 = e, bab = a3〉 and let H = 〈ab〉 ≤G. The cosets of H in G are {e, ab}, {a, a2b}, {a2, a3b} and {a3, b}, and wecan take T = {e, a, a2, a3} as a transversal. Putting g = b in Lemma 4.25 weobtain
b · e = a4b = a3 · (ab)b · a = a3b = a2 · (ab)b · a2 = a2b = a · (ab)b · a3 = ab = e · (ab),
where on each side of these equations the elements of T are underlined. Thepermutation σ, see (i) of Lemma 4.25, in this case has the form σ = (1, 4)(2, 3)as e and a3, and a and a2 are interchanged, and bξ = (ab)4 = e. A similarcalculation shows that aξ = e, and so the transfer in this example is the trivialhomomorphism. We obtain the same result if we take a different transversal.For example let T ′ = {ab, a, a2, b} be a second transversal, then repeatingthe above calculations we obtain
b · ab = b · (ab)b · a = a3b = a2 · (ab)b · a2 = a2b = a · (ab)b · b = e = ab · (ab),
and again we have bξ = (ab)4 = e.
The following corollaries are useful in the evaluation of the transfer.
Corollary 4.28 Using the notation set out above where T = {a1, . . . , an}is a transversal of H in G and g ∈ G, we can write T as a disjoint union ofsubsets
T = {a1,1, . . . , a1,m1} ∪ · · · ∪ {at,1, . . . , at,mt
}where
(i) gξ =∏tr=1 a
−1r,1g
mrar,1,
(ii)∑tr=1mr = [G : H], and
(iii) mr is the smallest positive s such that a−1r,1gsar,1 ∈ H.
Proof. As above we have σ ∈ Sn and, for r = 1, . . . , n, gar = arσhrwhere hr ∈ H. Let (r1, . . . , rm1) be a cycle of length m1 in σ, seeDefinition 3.3, and let ar1 = a1,1, . . . , arm1
= a1,m1, then
ga1,1 = a1,2hr1 , ga1,2 = a1,3hr2 , . . . , ga1,m1 = a1,1hrm1,

334 4 Homomorphisms
and combining these we obtain
a−11,1gm1a1,1 = hrm1
· · · hr1 ∈ H.
Also if s < m,
a−11,1gsa1,1 = a−11,1ars+1hrs · · · hr1 6∈ H
because the set T is a transversal. This shows that m1 is mini-mal, and a similar argument can be applied to the remaining cycles(a2,1, . . . , a2,m2), . . . . The main part of the result now follows using thedefinition of ξ. 2
We return to the example on page 333. The permutation σ equals(1, 4)(2, 3), and so in this case m1 = m2 = 2, a1,1 = e, a1,2 = a3, a2,1 = aand a2,2 = a2. Now using the corollary above we have
bξ =∏2
r=1a−1r,1b
2ar,1 = (eb2e)(a3b2a) = e
as in the example on page 333.
Corollary 4.29 Again using the notation set out above, if H ≤ Z(G) then,for all g ∈ G, gξ = gn where n = [G : H].
Proof. As H ≤ Z(G), we have H / G, see Problem 2.14. So if g ∈ Gand a−1gmra ∈ H, then gmr = a(a−1gmra)a−1 ∈ H. But H ≤ Z(G),and so a−1gmra = gmr . The result now follows by Corollary 4.28(i) and(ii). 2
Returning again to the example on page 333, we have Z(G) = Z(D4) =〈a2〉, and a transversal is {e, a, b, ab}. The reader should now check that gξ = efor all g ∈ G, and also g4 = e, again for all g ∈ G, confirming the corollaryin this case.
As noted above an important application of the transfer is in the proof ofBurnside’s Normal Complement Theorem given in Web Section 6.5. Anotheris the following
Theorem 4.30 For a group G, if p | o(G′∩Z(G)), then a Sylow p-subgroupof G is not Abelian.
A proof of this result is given in Problem 4.30. The result itself has connec-tions with the so-called Schur multiplier of a group, see Web Section 12.6 andIssacs [2008], page 151.
Some more problems relating to the work of this section are given at theend of the next section.

4.7 Group Presentation, Part 2 335
4.7 Group Presentation, Part 2
The main purpose of this section is to show that the group presentation con-struction described on page 58 is valid. We claimed that given a set (alphabet)A and a set of relations R on A (words on A ∪A′), then the system
H = 〈A |R〉
always forms a group. We do this by first constructing the ‘free’ group Gon A, and then showing that H can be treated as a factor group of G, theimplied normal subgroup being defined in terms of the words in R. Althoughwe know that H forms a group, it can be quite difficult (and in some casesimpossible) to determine its properties. In the second part of this section wedescribe a method mainly due to Todd and Coxeter which in many cases willhelp with this determination; it gives a description of the coset product oncea suitable subgroup is known.
First we need to give a new definition of the term ‘free’.
Definition 4.31 Given a set A, the group G is called free on A if theconditions (i) and (ii) given below are satisfied.
(i) There exists a map α from A to G.
(ii) Given a group H and a map β from A to H there exists a uniquehomomorphism θ : G→ H which satisfies αθ = β.
The diagram below illustrates the maps given by this definition. In manyapplications the set A is an alphabet (page 55), G is defined by a presentationon A, and the map α is the inclusion map of A into G.
A
H
G
?
������3
QQQQQQs
θ
β
α
If G was not free, then there would exist at least one group H for which nohomomorphism from G to H was possible because some relation would holdin G but not in H. So in this sense the ‘free’ group G is the most ‘general’possible on the set (alphabet) A. This definition of ‘free’ is an extension ofthe notion of a ‘free Abelian group’. A free Abelian group G is defined as adirect product (Web page 371) of copies of the infinite cyclic group Z; thatis if I = {. . . , i, . . . } is an index set, and ai is a generator of the ith copy ofZ, then a free Abelian group G has the form

336 4 Homomorphisms
G =∏
IZ =
∏i∈I〈ai〉,
with a typical element of the form
. . . asii . . .
where si is some integer. In this case the group is Abelian, and so the orderof the elements is immaterial. Let α : I → G be given by iα = ai, and let βbe a map from I into some group H, then it is easy to see that there existsa unique homomorphism θ from the free Abelian group G to H given by
( . . . asii . . . )θ = ( . . . (iβ)si . . . ).
The definition of the term ‘free’ given in the main text for a generalgroup was an informal one, so secondly we give a formal version of our origialdefinition. We shall then show that the two definitions agree.
Definition 4.32 Let G be a group.
(i) A subset C of G\{e} freely generates G if, and only if, each g ∈ G\{e}can be uniquely expressed in the form
g = cr11 . . . crjj , (4.5)
where ci ∈ C, ci+1 6= ci for all i, and ri is a nonzero integer.
(ii) G is called free if, and only if, it is freely generated by some subset Cof G\{e}.Notes. (a) The elements ci are not necessarily distinct, only adjacent onesare. For example c1c2c1c2c1 ∈ G. (b) The most important word in the defi-nition is ‘uniquely’: if cr11 . . . c
rjj = ds11 . . . dskk where ci, di ∈ C, and ri and si
are nonzero integers, then j = k, ci = di and ri = si for i = 1, . . . , j — thereare no relations amongst the elements of G apart from those that make Ginto a group.
We show now that our two definitions of free agree.
Theorem 4.33 If G is freely generated by C (Definition 4.32), H is agroup, and α is a map from C into H, then there exists a unique homomor-phism θ : G→ H with the property θ|C = α.
Proof. We establish uniqueness first. Suppose θ exists and g is givenby (4.5), then
eGθ = eH and
gθ = (c1θ)r1 . . . (cjθ)
rj
= (ciα)r1 . . . (cjα)rj (4.6)
This shows that θ is unique. Also ciθ = ciα, and so θ|C = α. For themain homomorphism equation we proceed as follows. First we have, ifg 6= e,

4.7 Group Presentation, Part 2 337
(eg)θ = gθ = eθgθ,
(ge)θ = gθeθ and
(ee)θ = eθ = eθeθ.
Secondly, suppose h = bs where b ∈ C and s is a non-zero integer. Thereare three cases to consider.
Case 1. b 6= cj . We have
gh = cr11 . . . crjj b
s and
(gh)θ = (c1α)r1 . . . (cjα)rj (bα)s = gθhθ.
Case 2. b = cj and rj + s 6= 0. We have
gh = crj1 . . . c
rj+sj and
(gh)θ = (c1α)r1 . . . (cjα)rj+s = gθhθ.
Case 3. b = cj and rj + s = 0. We have
gh = cr11 . . . crj−1
j−1 and
(gh)θ = (c1α)r1 . . . (cj−1α)rj−1(cjα)rj+s
= (c1α)r1 . . . (cjα)rj (bα)s = gθhθ.
Hence we have ghθ = gθhθ for all g and h of the form bs. Lastly weproceed by induction (on k). Suppose h = h1h2 where h1 = bs11 . . . b
sk−1
k−1and h2 = bskk . Then using the inductive hypothesis we have
(gh)θ = (gh1h2)θ = (gh1)θh2θ = gθh1θh2θ
= gθ(h1h2)θ = gθhθ.
This completes the proof of Theorem 4.33. 2
For the converse of the theorem see Problem 4.32.
Next we consider the formation a free group on a set, first we need toestablish the uniqueness property of reduced words. On page 57 we describedthe process of forming the reduced word w[∗] of a word w. This process alwaysgives a unique result as the next theorem shows.
Theorem 4.34 For each word w on an alphebet A the reduction processdescribed on page 57 gives a unique reduced word w[∗].
Proof. First note that every word w does reduce to a reduced word.Reduction proceeds by deleting pairs of letters from w step by step toform a reduced word and, as w only has a finite number of letters, thisprocedure must stop after a finite number of steps.
We prove the result by induction on n, the length (number of symbols)of w, that is on the number of letters from A ∪ A′ that make up w. Ifn = 0 there is nothing to prove as w is then the empty word which is

338 4 Homomorphisms
clearly reduced. Note that words of length 1 are also reduced. Supposethe result holds for all words of length less than or equal to n wheren > 1. Let w is a word of length n + 1, and suppose we have tworeductions (deletions) labelled (a) and (b). In (a), suppose the deletionremoves the consecutive pair of letters aiai+1, and in (b), suppose thedeletion removes the consecutive pair ajaj+1. There are a number ofcases to consider.
Case 1. j = i In this case the two reductions each give the sameword w′, say, of length n − 1. By the inductive hypothesis, w′ reducesto a unique reduced word, and so this is also true for w.
We may now assume that j > i.
Case 2. j = i+ 1 In this case we may suppose the ith, (i+ 1)st and(i+ 2)nd letters take the form
aa′a or a′aa′,
for some letter a ∈ A. This follows because we have consecutive deletionsin this case. Consider aa′a. Deletion (a) will reduce this term to a (bythe removal of aa′ as ai = a, ai+1 = a′ and ai+2 = a in this case), anddeletion (b) will again reduce this term to a (this time by the removalof a′a where aj = a′ and aj+1 = a). In each case the deletions give thesame result, a word of length n−1 with a in the ith place, and as in Case1 we can apply the inductive hypothesis. An exactly similar argumentapplies to subword a′aa′ which reduces to a′. Hence the induction stepis complete in this case.
Case 3. j > i + 1. In this case we suppose aiai+1 is removed byDeletion (a), and ajaj+1 is removed by Deletion (b); note there is nooverlap. Let w′ denote the result of Deletion (a) on w, and let w′′ theresult of Deletion (b) on w. Further, we can remove ajaj+1 from w′
to form a new word x (of length n − 3). We can also remove aiai+1
from w′′, and then we obtain the same word x (as j > i + 1). Bythe inductive hypothesis w′, w′′ and x all reduce to the same reducedword. This follows because x has a unique reduction x[∗] (by the iductivehypothesis), w′ and w′′ both reduce to x, and so both (w′)[∗] and (w′′)[∗]
equal x[∗]. But Deletion (a) (of w) gives w′, and Deletion (b) (also ofw) gives w′′. Hence the induction step is complete in this final case andthe theorem follows. 2
We can now prove our main existence theorem.
Theorem 4.35 For all sets of letters A there exists a free group on A.
Proof. An element of the group that we are about to construct is areduced word on the set A. Suppose w1 and w2 are reduced words onA. (Note that by definition we have a second disjoint set A′ having thesame cardinality as A, and a bijective map ′ between A and A′. Also thesymbols that make up w1 and w2 belong to A ∪ A′.) Using Definition3.17 we can form the reduced product
(w1w2)∗

4.7 Group Presentation, Part 2 339
of w1 and w2; that is we can form the concatenation w1w2 and thenwe apply the reduction process to form (w1w2)∗. By Theorem 4.34 thisgives a well-defined product on A∪A′. This product is associative, for ifw1, w2 and w3 are words on A, then both ((w1w2)∗w3)∗ and (w∗1(w2w3)∗
are equal to the unique reduction of w1w2w3 given by Theorem 4.34.The neutral element is the empty word which we denote by e (Note thate does not belong to A ∪ A′; see page 57). The inverse of the reducedword
c1c2 . . . cn is the word cncn−1 . . . c1,
where each ci ∈ A∪A′. As the first of these words is reduced, it followsimmediately that the second word is also reduced. (Note that the re-duction process is symmetrical as there is a bijection ′ between A andA′.) Hence we see that the set of reduced words on A forms a groupwhich we denote by 〈G〉. We need to show that it is free.
Let α be the inclusion map from A into G, clearly aα = a for alla ∈ A. This gives the first part of Definition 4.31. For the second partsuppose H is a group and β : A→ H. First we extend the domain of βto A ∪A′ by defining
a′β = (aβ)−1 for a ∈ A. (4.7)
This is valid because we are using the inverse operation in the group H.Further, if w = a1a2 . . . an where each ai ∈ A ∪ A′, we define the mapψ from the set of words on A into H by
wψ = a1β · · · · · anβ.
Note that by (4.7) if we reduce the word w by deleting aia′i or a′iai the
value of ψ is unaltered. Let θ be ψ with its domain restricted to G, andso θ : G → H. We claim that θ is a homomorphism. If w1 and w2 arereduced words on A (that is elements of G), then
w1θw2θ = w1w2θ by definition
= ((w1w2)∗)θ by note above,
so θ is the homomorphism required by Definition 4.31. Also clearly wehave αθ = β by definition. This completes the proof. 2
An immediate consequence of this result is the following characterisationof all groups.
Theorem 4.36 Every group is a homomorphic image of a free group.
Proof. Let H be a group and let B be a generating set for H (page25). Further, let α be the inclusion map from B into H. By Theorem4.35 there exists a free group G on the set B. Applying Condition (ii)in Definition 4.31 there exists a homomorphism θ from G to H with theproperty
(aα)θ = a for a ∈ B.
But 〈B〉 = H by definition of B, and so θ is surjective. Hence

340 4 Homomorphisms
H = {gθ : g ∈ G} = Gθ
which gives the result. 2
A famous theorem due Nielsen and Schreier states that every subgroupof a free group is also free; see the references quoted at the end of this subsec-tion. Our next corollary shows how normal subgroups come into the picture.Remember that a relation of an alphabet A is an equation of the form x = ewhere x is a word on A ∪A′ (page 58).
Corollary 4.37 Using the notation set out above where G is the free groupon A, θ is a homomorphism from G to H, and α is the inclusion map fromA to G, then x = e is a relation in H if, and only if, xα belongs to the kernelof the homomorphism θ.
Proof. Let
x = c1 . . . cr where ci ∈ A ∩A′ for i = 1, . . . , r.
The map α has domain A, we can extend its domain to A ∪ A′ bydefining
(a′)α = (aα)−1 for a ∈ A.This is valid as we are working in the group G. We have (aα)θ = a andusing this definition we also have (a′α)θ = a−1. As θ is a homomorphismthis further gives
(xα)θ = (c1α)θ . . . (crα)θ = c1 . . . cr = x = e,
and so x ∈ ker θ.
Conversely, suppose y ∈ ker θ and y = d1α . . . dsα. As we are workinginside G we may assume that d1 . . . ds is a reduced word on the alphabetA. Now yθ = e by supposition, and
yθ = d1 . . . ds = e.
By Theorem 4.34 the di are unique, hence d1 . . . ds = e is a valid relationin H. 2
We can now prove our main result: Theorem 3.19. We begin by restatingthis result. We have alphabets A = {a1, . . . , an} and A′ = {a′1, . . . , a′n}, abijection ′ mapping A onto A′, and a collection of words R = {x1, . . . , xm}where each xi is a concatenation of letters from A ∪ A′. The system 〈A |R〉is a subset of the free group on A with the added relations
x1 = · · · = xm = e.
Theorem 3.19 claims that this system forms a group, we prove this by showingthat it can be defined as the factor group G/K where G is the free group onA, and K is the smallest normal subgroup given by Corollary 4.37 using therelations in R. We let α be the inclusion map of A into G which as before weextend to A′ by letting a′α = (aα)−1 and, if x = c1 . . . cr is a word on A∪A′,then we let

4.7 Group Presentation, Part 2 341
xα = c1α . . . crα.
Further, let β : A→ G/K be given by
aβ = (aα)K for a ∈ A.
As above we extend the domain of the function β to A ∪ A′ by defininga′β = (aβ)−1 for a′ ∈ A′, and if x = c1 . . . cr where ci ∈ A ∪ A′, i = 1, . . . , r,we let xβ = c1β . . . crβ. Lastly we define
Aβ = {aβ : a ∈ A},(Aβ)−1 = {a′β : a′ ∈ A′}, and
Rβ = {xiβ : i = i, . . . ,m}.
Theorem 4.38 (3.19) Using the notation set out above, the set Rβ is acollection of relations on the generating set Aβ, and
G/K = 〈Aβ |Rβ〉.
Proof. In this proof α, β and γ are maps from sets of letters to groups,and θ and φ are homomorphisms. As G = 〈Aα〉 by definition, we seethat G/K = 〈Aβ〉. Also if xi ∈ R, then (xiα)K = K, and so xiβ = ein G/K; that is xiβ = e is a relation of G/K for all i. This shows that
G/K ⊇ 〈Aβ |Rβ〉.
Let J be a group and let γ be a map from Aβ to J which preservesthe relations in Rβ. We now apply the definition of a free group tothe map βγ from A to J . Hence there exists a unique homomorphismθ : G→ J with the property
(aα)θ = (aβ)γ for a ∈ A.
The map θ is a homomorphism, hence ((aα)−1)θ = ((aα)θ)−1. Also wecan extend the domain of γ to A ∪A′ by defining
(a′β)γ = ((aβ)γ)−1,
which gives
(a′α)θ = ((aβ)γ)−1 = (a′β)γ and (xiα)θ = (xiβ)γ
for all i. But by definition γ preserves the relations in Rβ, and so
(xiβ)γ = e which shows that xiβ ∈ ker θ,
and as K is minimal this further shows that
K ≤ ker θ.

342 4 Homomorphisms
Therefore θ induces a homomorphism φ from H(= G/K) to J whichsatisfies
(aβ)φ = (aα)θ = (aβ)γ.
Now using Problem 4.13(iv) [see Addendum] φ can be extended to ahomomorphism from H to J . This shows that G = 〈Aβ |Rβ〉. We usingthe same idea here at that given in Definition 4.31, see the note belowthe diagram on page 335. 2
Corollary 4.39 If A is a set of generators for a group G, then there existsa set R of relations defined on the elements of A ∪ A′ with the propertyG = 〈A |R〉.
Proof. The First Isomorphism Theorem applied to the homomorphismθ defined in the above proof gives an isomorphism from G/ ker θ onto Hwhich maps (aα) ker θ to a. Now suppose R = {xiα : i = 1, . . . , s} is aset of generators for ker θ, then ker θ is identical to the smallest normalsubgroup K containing all elements of the form xiα for i = 1, . . . , s,and so by Theorem 4.38 we have G = 〈A |R〉 because aθ is mapped toa and xiθ is mapped to xi by this isomorphism. 2
We have now completed our stated aim which was to prove Theorem3.18, that is to justify the use of presentations in the theory. Further devel-opments have been considered many of which relate infinite groups. One ofthese involves the extension of free group theory to so-called free productsand free products with amalgamated subgroups; for details the reader shouldconsult Scott [1964], Suzuki [1982], or Robinson [1982] amongst other texts.Another development concerns the Word Problem for Groups, an importantresult proved independently by P. S. Novikov, W. W. Boone, and J. L. Brit-ten which extends a similar result for semigroups proved by A. A. Markovand E. L. Post, and which makes extensive use of ideas from mathematicallogic. A group with a presentation G = 〈A |R〉 is said to have a solvable wordproblem if there exists a computer algorithm which will determine in a finitetime whether the equation x = e holds in G where x is an arbitrary wordon the alphabet A. Novikov, Boone and Britten showed that there exists afinitely presented group (that is one with a finite alphabet and a finite num-ber of relations) for which the word problem is unsolvable — there is at leastone word in this group for which we cannot determine whether, or not, itequals the neutral element. A good account of this topic is given in Rotman[1994].
Coset Enumeration
As we have noted before, given a presentation of a group it can be difficult,and in some cases impossible, to determine the group’s properties includingits order or even if it is finite. Todd and Coxeter developed a method whichwill give some of these properties provided we know in advance that thegroup is finite. It is ‘mechanical’ and so is easily computerised; the computerprogram GAP makes extensive use of this procedure in several contexts. Weshall describe the basic method by giving a series of examples.

4.7 Group Presentation, Part 2 343
Suppose we have a group with a presentation G and a subgroup H, themethod of Todd and Coxeter will determine the coset product. We label thecosets with the numerals 1, 2, . . . , where the subgroup H has the label 1. If ais a generator of the group G then, given a numeral (coset) m, the method willsolve the equation ma = n, that is it will determine the coset ma; rememberthroughout that the numerals m and n are labels for cosets. We do this byconstructing a table of coset multiplications; once this is complete we candescribe the basic structure of the group in question.
Example 1. Dihedral Group D3 with a Subgroup of Order 2
For our first example we consider the group
D3 = 〈a, b | a2 = b3 = (ab)2 = e〉,
and take H = 〈a〉. (We often take H cyclic but this is not essential.) The firstrow of the table lists the letters which make up the relations with asterisksbetween the relation words, and so has the form:
∗ a a ∗ b b b ∗ a b a b ∗
We begin the second row by placing ‘1’ below each asterisk (this correspondsto the fact that each relation word equals the neutral element) and betweeneach pair of relation letters a (as Ha = H (or 1a = 1) for all a ∈ H (= 1))
* a a * b b b * a b a b *1 1 1 1 1
This reads as 1a = 1 et cetera; in general if m and n are consecutive numeralsin a row and c is the group letter at the head of the columns containing m andn, then mc = n is the coset product. At each stage we use the informationto hand to try to complete the row, if we cannot do this we introduce a newcoset (numeral). In our example we can put ‘1’ in the seventh place copyingthe first two entries (that is, 1a = 1). As we have no information on b yet weplace ‘2’ and ‘3’ in the fourth and fifth columns, respectively, as shown below(so 1b = 2 and 2b = 3). This gives our first ‘new fact’: 3b = 1 (note b is anelement of order 3) and enables us to complete the row. We can place ‘2’ inthe eighth column and ‘3’ in the ninth (as 1b = 2, and 3b = 1). This providesa new fact: 2a = 3 which we will use later.
* a a * b b b * a b a b *1 1 1 2 3 1 1 2 3 1
We have introduced two new cosets (numerals) 2 and 3, and so we need atleast two new rows in the table. In some cases a few of these rows will notbe necessary because we can find one or more identities between the cosetsunder consideration and those already introduced, but this is not so here. Webegin by placing ‘2’ below each asterisk in Row 3 and ‘3’ below each asteriskin Row 4, and then we try to complete these rows using the informationtabulated so far. So we can place ‘3’ in the second entry of the third rowusing the fact noted above (2a = 3). This gives a new fact: 3a = 2 (note that

344 4 Homomorphisms
a is an element of order 2). We now have sufficient information to completethe table as shown below.
* a a * b b b * a b a b *1 1 1 2 3 1 1 2 3 12 3 2 3 1 2 3 1 1 23 2 3 1 2 3 2 3 2 3
By definition the table is finished because we have the same number of com-pleted rows as numerals (cosets). It gives the following description of thecoset product:
1a = 1, 2a = 3, 3a = 2, 1b = 2, 2b = 3, 3b = 1. (4.8)
This incidentally reproves the fact that o(D3) = 6, that is the order of H(o(〈a〉)) times the number of coset rows in the table (which also equals thenumber of numerals used). The reader should check that the data given in(4.8) is exactly mirrored in the table above.
Example 2. Symmetric Group S4 with a Subgroup of Order 4
For our second example we consider the symmetric group S4, using thepresentation
S4 = 〈a, b | a4 = b3 = (ab)2 = e〉,and the subgroup H = 〈a〉. We introduce two extra symbols. Each time anew numeral (coset) is defined (reading the tables from left to right, and thenby columns) we place a bar over it, and each time a new fact is discovered (ofthe form mc = n) we place the symbol � between m and n. So, following thesame procedure as above, the first two rows of our coset enumeration tablefor S4 and H are as follows:
* a a a a * b b b * a b a b *1 1 1 1 1 2 3 � 1 1 2 � 3 1
We have 3b = 1 (as b3 = e) and 2a = 3 (as 1b = 2), but we do not have avalue for 3a which we set as 4, or for 4a which we set as 5. On the other handwe do have 5a = 2 applying the relation a4 = e. Using this information wecan write down the next two rows of the coset table as follows:
* a a a a * b b b * a b a b *1 1 1 1 1 2 3 � 1 1 2 � 3 1
2 3 4 5 � 2 3 1 2 3 1 1 2
3 4 5 2 3 1 2 3 4 � 5 2 3
At this stage the table is not complete because we have more numerals(cosets) than numeral rows. So we need to start again placing ‘4’ below eachasterisk in Row 5 and ‘5’ below each asterisk in Row 6. During this processwe will need to introduce the sixth coset (numeral) ‘6’ by defining 5b = 6.Constructing this row (Row 5) shows that 6a = 6 and 6b = 4. Hence we cancomplete the table now.

4.7 Group Presentation, Part 2 345
* a a a a * b b b * a b a b *1 1 1 1 1 2 3 � 1 1 2 � 3 1
2 3 4 5 � 2 3 1 2 3 1 1 2
3 4 5 2 3 1 2 3 4 � 5 2 3
4 5 2 3 4 5 6 4 5 6 � 6 � 4
5 2 3 4 5 6 4 5 2 3 4 5
6 6 6 6 6 4 5 6 6 4 5 6
The table is now finished, we have six cosets 1, 2, . . . , 6 and six rows; and sothe coset product is given by
1a = 1, 2a = 3, 3a = 4, 4a = 5, 5a = 2, 6a = 6,
1b = 2, 2b = 3, 3b = 1, 4b = 5, 5b = 6, 6b = 4.
This can be used to give a permutation representation for S4 with a →(2, 3, 4, 5) and b → (1, 2, 3)(4, 5, 6). Note also that each column in this tableis a permutation of the set {1, 2, . . . , 6}, similar properties hold for all cosetenumeration tables (use Lemma 2.22) and this can be used as a check on thecalculations.
Example 3. Special Linear Group SL2(3) with a Cyclic Subgroupof Order 3
Our remaining two examples will again use groups from Chapter 8, andthey will illustrate some further simple adaptions of the method. Let SL2(3)be presented by
SL2(3) = 〈a, b | a3 = abab−1a−1b−1 = e〉,
with subgroupH = 〈a〉; see page 176. We fill in the first three lines of the cosetenumeration table using similar arguments to those applied in the exampleabove by letting 1b = 2, 3b−1 = 2, 2a = 4, 4a = 5 and 5b−1 = 6. Usinginverses these also show that 2b−1 = 1, 2b = 3, 5a−1 = 4 and 6a−1 = 3 (as5b−1 = 6 and 3b−1 = 2). Secondly we can deduce the identities: 4b−1 = 4(and so 4b = 4) and 5a = 2 (as a3 = e). Hence the first three rows of thetable are:
* a a a * a b a b−1 a−1 b−1 *1 1 1 1 1 2 4 � 4 2 1
2 4 5 � 2 4 � 4 5 6 � 3 2
We can now proceed much as before. We let 6a = 7 and 5b = 8, this gives7a = 3 and 8a = 8. Hence the next three lines of the table are:
3 6 7 � 3 6 5 2 1 1 3
4 5 2 4 5 8 � 8 5 4 4
5 2 4 5 2 3 6 8 8 5

346 4 Homomorphisms
We have used eight cosets (numerals) and so we need at least three furtherrows in the table. This is sufficient because we do not need to introduce anymore cosets; hence the complete table is as follows:
* a a a * a b a b−1 a−1 b−1 *1 1 1 1 1 2 4 � 4 2 1
2 4 5 � 2 4 � 4 5 6 � 3 2
3 6 7 � 3 6 5 2 1 1 3
4 5 2 4 5 8 � 8 5 4 4
5 2 4 5 2 3 6 8 8 5
6 7 3 6 7 � 7 3 2 5 6
7 3 6 7 3 1 1 3 7 7
8 8 8 8 8 6 7 7 6 8
The information in this table can be summarised as follows:
1a = 1, 2a = 4, 3a = 6, 4a = 5, 5a = 2, 6a = 7, 7a = 3, 8a = 8,
1b = 2, 2b = 3, 3b = 1, 4b = 4, 5b = 8, 6b = 5, 7b = 7, 8b = 6.
This reproves the fact that o(SL2(3)) = o(A) · 8 = 24.
Example 4. Group E with its Subgroup of Order 3
For our last example we consider the group E with its presentation (page182)
E = 〈a, b | a4 = d 6 = (ad)2 = (a3d)2 = e〉,and its unique subgroup of order 3 given byH = 〈d2〉. HereH is not generatedby one of the group generators a or d, so we proceed as follows. We define
1a = 2, 2a = 3, 3a = 4, and 1d = 5.
As we are considering cosets of H we have 5d = 1 (d 2, d 4 and d 6 = e all liein H). Also as a4 = e, we have 4a = 1. This gives the first half of Row 2 inthe table on the next page. To complete this row we define
2d = 6, and 4d = 7.
As 5d = 1 these equations give
6a = 5, and 7a−1 = 5 or 5a = 7,
see the completed row in the table below. The information in this row alsogives 2a−1 = 1 and 5a−1 = 6. Applying this to the latter part of Row 3 weobtain 6d = 2 as this row ends in ‘2’ (that is (ad)2 = e). If we set 3d = 8 weobtain 8a = 6 (check between the third and fourth asterisks in Row 3). Thiscompletes the third row and we can construct the fourth row using similarmethods which gives the facts: 7a = 8 and 8d = 3. No new cosets are neededfor we can complete the remaining rows using the information to hand.

4.8 Problems 4W 347
* a a a a * d d d d d d * a d a d *a−1 d a−1 d *
1 2 3 4 � 1 5 1 5 1 5 1 2 6 � 5 1 4 7 � 5 1
2 3 4 1 2 6 2 6 2 6 2 3 8 � 6 2 1 5 6 � 2
3 4 1 2 3 8 3 8 3 8 3 4 7 � 8 3 2 6 8 � 3
4 1 2 3 4 7 4 7 4 7 4 1 5 7 4 3 8 7 4
5 7 8 6 5 1 5 1 5 1 5 7 4 1 5 6 2 1 5
6 5 7 8 6 2 6 2 6 2 6 5 1 2 6 8 3 2 6
7 8 6 5 7 4 7 4 7 4 7 8 3 4 7 5 1 4 7
8 6 5 7 8 3 8 3 8 3 8 6 2 3 8 7 4 3 8
This construction shows that [G : H] = 8 and the coset product can besummarised as
1a = 2, 2a = 3, 3a = 4, 4a = 1, 5a = 7, 6a = 5, 7a = 8, 8a = 6,
1d = 5, 2d = 6, 3d = 8, 4d = 7, 5d = 1, 6d = 2, 7d = 4, 8d = 3.
We have given a few examples to illustrate the basic ideas. Many im-provements and simplifications have been suggested, and some remarkablefacts have been established using variants of this basic method. For exam-ple a permutation representation for the Lyons sporadic group Ly (with or-der 51765,179004,000000) was constructed by Sims using a subgroup with8835156 cosets; see Sims, C. C., The existence and uniqueness of Lyons’group. Finite Groups ’72, edited by Gagen, Hale and Shult, North HollandPub. Co., 1973, pages 138 to 141. The reader wishing to go further with thismethod should first look at Coxeter and Moser [1984], pages 12 to 18, and143 to 148, and Suzuki [1982], pages 174 to 180 where a formal definition dueto Higman is given.
4.8 Problems 4W
Problem 4.23 (i) Suppose H/ G and T ⊆ G. Show that T is a transversalof H in G if, and only if, G = HT and, for all t1, t2 ∈ T with t1 6= t2, wehave t−11 t2 6∈ H.
(ii) Using (i), if H,J ≤ G, G = HJ and H ∩ K = 〈e〉, deduce J is atransversal of H in G.
(iii) If J ≤ H ≤ G, {j1, . . . , jm} is a transversal of J in H, and{h1, . . . , hn} is a transversal of H in G, show that {hrjs}1≤r≤n,1≤s≤m isa transversal of J in G.
(iv) If K / G and T is a transversal of K in G, show that the set T−1 ={t−1 : t ∈ T} is also a transversal of K in G.
Problem 4.24 For this problem we use the term left transversal for thetransversal given in Definition 4.24. First you are asked to define a righttransversal.

348 4 Homomorphisms
Now suppose H ≤ G.
(i) Show that if H / G, then every left transversal is a right transversal,and vice versa.
(ii) Prove that if every left transversal of H in G is also a right transversal,then H / G.
(iii) Give an example using one of the groups discussed in Chapter 8.
Problem 4.25 Suppose K / J ≤ G, [G : J ] = n < ∞, o(J/K) = m < ∞and J/K is Abelian. Prove that if (m,n) = 1, then
J ∩G′ ∩ Z(G) ≤ K.
Problem 4.26 Suppose G is a finite group.
(i) Show that if G has a Abelian Sylow p-subgroup, then p - o(G′∩Z(G)).Hence deduce G′∩Z(G) = 〈e〉 if all of the Sylow subgroups of G are Abelian.Theorem 10.18 is also relevant here.
(ii) Prove that if G/Z(G) is a p-group, then G′ is also a p-group.
(iii) Give an example to show that the converse of (ii) is false.
(iv) Lastly, suppose G is a non-Abelian p-group, show that
G′ ∩ Z(G) > 〈e〉.
Problem 4.27 Suppose n > 2 and G = Sn. Using the natural action(Chapter 5) of G on the set {1, 2, . . . , n}, let H = stabG(1) and J = An ∩H.Show that the transfer of G into H/J is non-trivial if, and only if, n is odd.(Hint. Note that {e, (1, 2), . . . , (1, n)} is a transversal of H in G.)
For the next two problems suppose the groups G are infinite.
Problem 4.28 Show that if G has a finite generating set and H is asubgroup of G with the property [G : H] < ∞, then H also has a finitegenerating set. Note that this result can fail if the index [G : H] is infinite.
Problem 4.29 Prove the following important result which is due to Schur:
If [G : Z(G)] <∞ then G′ is finite.
(Hint. Begin by showing that G′ has a finite generating set, then use theprevious problem to deduce G′ ∩ Z(G) also has a finite generating set. Nowconsider the transfer of G into Z(G), and use Corollary 4.29.) We notedearlier that an Abelian group with a finite generating set and finite exponentis finite; this is not true in general, see page 26.
Problem 4.30 Prove Theorem 4.30. (Hint. Assume the contrary, choosea ∈ P ∩G′∩Z(G) and, using the transfer ξ of G to P , show that aξ = a[G:P ].Then, noting that ξ is a homomorphism, obtain a contradition. For the secondpart see Chapter 8.)
4.8 Problems 4W 349
Problem 4.31 Suppose G is a free group. Prove the following statements.
(i) G is torsion-free (except for e it has no elements of finite order).
(ii) If G has at least two generators (its rank is larger than 1), then it iscentreless.
(iii) G is Abelian if, and only if, it is cyclic.
Problem 4.32 Prove the converse of Theorem 4.33, and so complete theresult relating our two definitions of ‘free’. (Hint. Consider the homomor-phism property given in Definition 4.31.)
Problem 4.33 Suppose 〈A |R〉 is a presentation of a group G. Show thatif S is another set of relations on A, then the group H = 〈A |R ∪ S〉 is ahomomorphic image of G. Hence if we add more relations to the presentationof G we obtain a presentation of some factor group of G.
Problem 4.34 Let a, b, c and d be elements of a finite group which satisfy:
a−1ba = b2, b−1cb = c2, c−1dc = d2, d−1ad = a2.
Using the following method show that a = b = c = d = e. Suppose o(a) = rand o(b) = s with r, s > 1. Show that
2r ≡ 1 (mod s).
Deduce the least prime divisor of r is smaller than the least prime divisorof s. Further, if q is a prime divisor of s, then there exists divisors t and p(prime) of r which satisfy
2t 6≡ 1 (mod q) and 2tp ≡ 1 (mod q).
Now use Fermat’s Theorem to obtain a contradiction.
In 1951 Higman2 showed that if we remove the requirement that G isfinite, then G is not the neutral group, and it has a maximal normal subgroupK with the property that G/K is a finitely generated infinite simple group— one of the first known examples of such a group.
Problem 4.35 Investigate the proposition: Suppose G is a group with ngenerators and m relations where m < n, then G is infinite.
Problem 4.36 Write out the coset enumeration tables for the group A5
and subgroups isomorphic to (a) C5, (b) C3, and (c) C2 × C2.
Problem 4.37 Explain why the coset enumeration method fails for thegroup
H = 〈a, b | a3 = b3 = (ab)3 = e〉and the subgroup 〈a〉. (Hint. Try to construct the coset enumeration table.)Note that the method will succeed if the exponents 3, 3, 3 are replaced by
2 A finitely generated infinite simple group. J. London Math. Soc., 26, pp. 61-64.

350 4 Homomorphisms
either (a) 2, 2,m where m ≥ 2 (Problem 3.22), or (b) 2, 3, n where 3 ≤ n ≤ 5;see Coxeter and Moser [1984].
Problem 4.38 Consider the group J with presentation
J = 〈a, b | a5 = b3 = (ab)4 = e, R〉
where R stands for the relation: (ab)2 ∈ Z(J). First construct the cosetenumeration table for this group and the subgroup generated by a and (ab)2.Secondly, try to simplify this table by introducing a new ‘variable’ c = ab(for more details see Suzuki [1982], page 176). Incidently J is isomorphic tothe special linear group SL2(5) (page 451).

5.4 Transitive and Primitive Permutation Groups 351
5.4W Transitive and PrimitivePermutation Groups
Here we return to the study of permutation groups begun in Chapter 3 andintroduce tramsitivity and primitivity. This work is more ‘specialised’ thanthat given in the earlier sections of the chapter; some applications will begiven in Chapter 12 and Web Section 12.6. The development is based inpart on Robinson [1982], Chapter 7.
Transitivity
We begin with
Definition 5.28 (i) Given a set X, a group of permutations G on X, thatis a subgroup of SX , is called a permutation group on X.
(ii) The degree of G is o(X).
(iii) G is called transitive on X if, for each pair x, y ∈ X, there exists anelement σ ∈ G with the property
y = xσ.
If this property fails then G is called intransitive on X.
(iv) If G acts on X and ν : G 7→ SX is the permutation representationgiven in Definition 5.9, then the action of G on X is called faithful if thehomomorphism ν is injective.
By Theorem 5.11, we see that if ν is injective, then the intersection of thestabilisers stabG(x) for x ∈ X is the neutral subgroup.
In Example (d) on page 93 we defined a permutation action. For each permu-tation group G on X we see that G acts on X using this permutation action,and G is transitive if, and only if, the corresponding action is transitive.
Examples. Clearly both the groups An and Sn are transitive on theirunderlying sets {1, . . . , n}, but note there are both intransitive on the set{1, . . . , n+ 1}. Some further examples are given in Chapter 12.
A stronger transitivity property holds for the group Sn (Problem 5.29gives a similar property for An): if we take two subsets of X = {1, . . . , n},each with k elements where k ≤ n, there is an element of Sn which providesa bijection of the first set onto the second; we say Sn is k-transitive, seedefinition below. For large k not many k-transitive groups exist3, but thosethat do have a number of special properties.
3 The following result holds (see the reference quoted above)(i) The only 4-transitive groups are Sn (n > 3), An (n > 5), M11 and M23,(ii) The only 5-transitive groups are Sn (n > 4), An (n > 6), M12 and M24, and(iii) If n > 5, then the only n-transitive groups are Sn and An+2.
The current proof of this theorem relies on CFSG, but it is generally believed that aCFSG-free proof is possible — a hard open problem!

352 5 Actions and the Orbit-Stabiliser Theorem
Given a finite set X and positive integer k which is not greater than o(X)we let {X; k} denote the set of all ordered k-element subsets of X with norepetition. If o(X) = n and k ≤ n, then clearly
o({X; k}) = n(n− 1) . . . (n− (k − 1)). (5.10)
If G is a permutation group on X, we define a new action of G on {X; k}by
(a1, . . . , ak)\σ = (a1σ, . . . , akσ), (5.11)
where (a1, . . . , ak) ∈ {X; k}, σ ∈ G, and k ≤ n, the reader should check thatthe action axioms hold.
Definition 5.29 (i) Using the notation set out above, we say that G isk-transitive if the action of G on {X; k} is transitive.
(ii) G is called sharply k-transitive if it is k-transitive, and for every pairof k-tuples in {X; k} there is a unique σ ∈ G which provides a bijection ofthe first member of the pair to the second.
Note that 1-transitivity is the same as transitivity. Once we have provedthe following two results we shall give some examples of sharply 2- and 3-transitive groups, and in Chapter 12 we shall discuss some sharply 4- and5-transitive examples – the Mathieu groups M11 and M12.
The following straightforward theorem is basic.
Theorem 5.30 If G is a transitive permutation group on a finite set X,x ∈ X, and k > 1, then G is k-transitive on X if, and only if, stabG(x) is(k − 1)-transitive on X\{x}.
Proof. First suppose G is k-transitive on X. If
(x1, . . . , xk−1), (y1, . . . , yk−1) ∈ {X\{x}; k − 1},
then xi 6= x 6= yi for i = 1, . . . , k−1, and by hypothesis (k-transitivity),there exists σ ∈ G which maps
(x1, . . . , xk−1, x) to (y1, . . . , yk−1, x).
But then σ maps x to x, and (x1, . . . , xk−1) to (y1, . . . , yk−1), and as thisapplies to all pairs of distinct (k− 1)-tuples of elements of G, the resultfollows in this case by the definitions of stability and (k−1)-transitivity.
Conversely, suppose stabG(x) is (k−1)-transitive on {X\{x}; k−1},and let (x1, . . . , xk), (y1, . . . , yk) ∈ {X; k}. The group G is transitive byhypothesis, and so there exists τ1, τ2 ∈ G to satisfy
xkτ1 = x and xτ2 = yk.
By hypothesis we can find σ ∈ stabG(x) which maps (x1τ1, . . . , xk−1τ1)to (y1τ
−12 , . . . , yk−1τ
−12 ). That is

5.4 Transitive and Primitive Permutation Groups 353
xiτ1σ = yiτ−12 or xiτ1στ2 = yi,
for i = 1, . . . , k−1. Further, as σ ∈ stabG(x) we have xkτ1στ2 = xστ2 =xτ2 = yk. Combining these two statements we see that τ1στ2 belongsto G and maps (x1, . . . , xk) to (y1, . . . , yk). As above this applies to allsubsets of G with k elements, and so the result follows. 2
Note that by treating each x in turn this result shows that if a group G is(k + 1)-transitive, then it is also k-transitive as stabG(x) ≤ G.
Corollary 5.31 Suppose o(X) = n, k ≤ n, and G is k-transitive on X.
(i) o(G) is divisible by n(n− 1) . . . (n− (k − 1)).
(ii) G is sharply k-transitive if, and only if, o(G) = n(n−1) . . . (n−(k−1)).
Proof. (i) This is an immediate consequence of (5.10) and the Orbit-stabiliser Theorem (Theorem 5.7).
(ii) This also follows from (5.10) and Theorem 5.7, for in this casethe stabiliser has order 1. 2
We give some examples of sharply 2- and 3-transitive groups.
Example. LetX = Fp ∪ {∞}.
Reader: think of X as a ‘line’ in a ‘geometry’ defined over the finite field Fpwith p + 1 elements where {∞} is the ‘point at infinity’ on this line.4 Wework with the symbol ∞ in the usual naive way, that is: 1/0 =∞, a+∞ =∞ = a−∞,∞/∞ = 1 et cetera. Further, let LF (p) denote the set of linearfractional transformations on P; that is the set of functions α : P → P where,for x ∈ P\{∞},
xα =ax+ b
cx+ dand ∞α =
a
c,
a, b, c, d ∈ Fp, and ad− bc 6= 0 (that is ad− bc 6≡ 0 (mod p)). It can be shownthat LF (p) is a group with the operation of composition of functions, and itis isomorphic to GL2(p) factored by its centre (PGL2(p); page 170). Usingthe natural action of LF (p) on P, where x\α = xα, we define
LP (p) = stabLF (p)(∞),
and we obtain the group of all linear polynomial functions, that is maps ofthe type x→ ax+ b where x ∈ P and a 6= 0. We have
Theorem 5.32 (i) The group LP (p) is sharply 2-transitive on Fp, and ithas order p(p− 1).
(ii) The group LF (p) is sharply 3-transitive on Fp ∪ {∞}, and it has orderp(p2 − 1).
4 We can use any finite field as the base field in this example. Also P is called the projectiveline, see Chapter 12 for a further discussion of this type of geometry.

354 5 Actions and the Orbit-Stabiliser Theorem
Proof. We show first that LP (p) is 2-transitive on Fp. As Fp is a field,given x1, y1, x2, y2 ∈ Fp where xi 6= yi, i = 1, 2, we can find a, b ∈ Fp tosatisfy:
x2 = ax1 + b, y2 = ay1 + b where a 6= 0.
Hence there exists an element of LP (p) which maps (x1, y1) to (x2, y2),and so LP (p) is 2-transitive. This further shows that LF (p) is transitiveon X = Fp ∪ {∞} because LP (p) is transitive on Fp, and the linearfractional function which maps x to 1/x also maps ∞ = 1/0 to 0, andvice versa. Using Theorem 5.30 this shows that LF (p) is 3-transitive onthe set X.
Further, the order of LP (p) is p(p−1). In the definition above, a andb are arbitrary elements of Fp except that a 6= 0. Hence by Corollary5.31(ii), LP (p) is sharply 2-transitive on Fp. Also o(LF (p)) = (p +1)p(p − 1) because [LF (p) : LP (p)] = o(X) = p + 1, and so LF (p) issharply 3-transitive, again by Corollary 5.31(ii); the theorem follows. 2
Zassenhaus has shown that every sharply 2-transitive group is either of thesame general type as LP (p), or has one of the following orders: 52, 72, 112, 232,292 or 592; see Passman [1968], and Huppert and Blackburn III (1982b). Weshall return to this topic in Web Section 14.3 where we discuss Frobeniusgroups.
Primitive Permutation Groups
We come now to primitive permutation groups, they have a somewhat tech-nical definition but as we shall see below they are a useful tool in the furtherdevelopment of the theory of transitive groups.
Definition 5.33 Let G be a transitive permutation group on a set X. Aproper subset Y of X is called an imprimitive subset, or sometimes a block,for G if
(i) o(Y ) ≥ 2, and
(ii) for each σ in G, the sets Y and Y σ are either identical or disjoint.
The group G is called imprimitive if it possesses an imprimitive subset, andit is called primitive if no such subset exists. To be more precise it is theaction that is (im)primitive: A permutation group is (im)primitive if thecorresponding action has this property.
It is easy to see that the symmetric group Sn is primitive providedn > 2. The group D4 is an example of an imprimitive group. This grouphas the presentation 〈a, b | a4 = b2 = (ab)2 = e〉, and we can treat itas a permutation group on a 4-element set if, for example, we let a 7→(1, 2, 3, 4) and b 7→ (1, 3). It is a straightforward exercise to show thatY = {a, ab} = {(1, 2, 3, 4), (1, 2)(3, 4)} is an imprimitive subset for D4. Forinstance Y (1, 3) = Y , and Y (13)(24) = {(1, 4, 3, 2), (1, 3)} which has no ele-ment in common with Y .

5.4 Transitive and Primitive Permutation Groups 355
The imprimitive subsets of an imprimitive group behave rather like cosetsfor we have5 imprimitive subsets
Theorem 5.34 Suppose G is a transitive permutation group on X, Y isan imprimitive subset for G, and H = {σ ∈ G : Y σ = Y }.(i) H ≤ G.
(ii) If Z is a transversal of H in G (Web Section 4.6), then the collection ofsubsets
Y σ = {yσ : y ∈ Y },one for each σ ∈ Z, forms a partition of X.
(iii) o(X) = o(Y ) · o(Z).
(iv) In the natural action, defined by right multiplication, the subsets Y σ arepermuted by the elements of G.
Proof. (i) This is a straightforward exercise for the reader.
(ii) and (iii) Suppose x ∈ X and y ∈ Y . We can find τ ∈ G tosatisfy x = yτ because G is transitive. Also, as Z is a transversal of Hin G, we can find α ∈ H and ν ∈ Z to satisfy τ = αν. Combining theseequations we have, for x ∈ X,
x = yτ = (yα)ν ∈ Y ν,
hence X equals the union of Y ν for ν ∈ Z. Further, if Y ν ∩ Y ν′ 6= ∅,then Y ∩ Y ν′ν−1 6= ∅, and so Y = Y ν′ν−1 and ν′ν−1 ∈ H as Y is animprimitive subset. But ν and ν′ are members of the same transversal,therefore ν = ν′. This proves (ii), and (iii) follows immediately becauseo(Y ν) = o(Y ).
(iv) If ν ∈ Z and σ ∈ G, then Hνσ = Hν1, say, is a permutation ofthe set of right cosets of H in G. Therefore (Y ν)σ = Y ν1, that is (iv)follows. 2
Corollary 5.35 If G is a transitive permutation group on X and o(X) isprime, then G is primitive.
Proof. This follows immediately from Theorem 5.34(iii). 2
For example this shows that S3 acts primitively on {1, 2, 3}. The reader shouldcheck that the argument we used for D4 in the example on page 354 does notwork in this case.
Theorem 5.36 If G is a transitive permutation group on X, then G isprimitive if, and only if, stabG(x) is a maximal subgroup of G, and thisapplies for all x ∈ X.
Proof. Suppose we have stabG(x) < H < G, that is the stabiliser of xin G is not maximal. Let
5 Note that the imprimitive subsets, the blocks, are subsets of the underlying set X andnot of the group G.

356 5 Actions and the Orbit-Stabiliser Theorem
Y = {xσ : σ ∈ H}.
Now o(Y ) ≥ 2 because stabG(x) is a proper subgroup ofH. Also Y 6= X.For if Y = X and σ ∈ G, we can find τ ∈ H to satisfy xσ = xτ , thatis στ−1 ∈ stabG(x) which in turn shows that σ ∈ H and, as this holdsfor all σ ∈ G, we have H = G contradicting our hypothesis. Is Y animprimitive subset? Yes, for if Y ∩ Y σ 6= ∅ we can find τ1, τ2 ∈ H withthe property xτ1 = xτ2σ. This gives in turn τ2στ
−11 ∈ stabG(x), σ ∈ H,
and Y = Y σ. By definition it follows that G is imprimitive.
For the converse, suppose Y is an imprimitive subset of X. By thetransitivity of G we may suppose x ∈ Y . Let
J = {σ ∈ G : Y = Y σ} so J ≤ G,
as the reader can easily check. Now let y, z ∈ Y . As G is transitive, wecan find σ ∈ G to satisfy yσ = z, then z ∈ Y ∩ Y σ and σ ∈ J . By theOrbit-stabiliser Theorem (Theorem 5.7) this shows that
o(Y ) = [J : stabJ(x)].
If σ ∈ stabG(x), then x = xσ ∈ Y ∩ Y σ which shows that Y = Y σ asY is imprimitive, and σ ∈ J (by definition of J). Hence stabG(x) ≤ Jand stabG(x) = stabJ(x). Combining these we have
o(X) = [G : stabG(x)] and o(Y ) = [J : stabJ(x)] = [J : stabG(x)].
Therefore stabG(x) < J as o(Y ) > 1, and J < G as o(Y ) < o(X), thatis stabG(x) is not maximal in G. 2
The following corollary gives a number of examples of primitive groups,remember that a k-transitive group is 2-transitive if k ≥ 2.
Corollary 5.37 A 2-transitive permutation group is primitive.
Proof. Suppose G is 2-transitive on X, and Y ⊆ X is an imprimitiveset for G, then we can find x, y ∈ Y, x 6= y and z ∈ X\Y (set difference).By the 2-transitivity of G, there is an element σ ∈ G satisfying xσ = xand yσ = z. Hence x ∈ Y ∩Y σ which in turn shows that Y = Y σ. Thisis a contradiction because it also implies that z = yσ ∈ Y . 2
The last basic result in this section provides a connection between prim-itive groups and transitivity.
Theorem 5.38 If K is a non-neutral normal subgroup of a primitive per-mutation group G on X, then K is transitive on X.
Proof. Let x ∈ X and let Y = {xσ : σ ∈ K}, so Y is an orbit ofthe natural action of K on X which contains x. If α ∈ G and σ ∈ K,then (xσ)α = xαα−1σα where α−1σα ∈ K by hypothesis. This showsthat Y α is another orbit of K on X, one which contains xα. As orbitsare either disjoint or identical, see Lemma 5.2, we have Y = Y α or

5.4 Transitive and Primitive Permutation Groups 357
Y ∩Y α = ∅, that is Y is an imprimitive set if it contains more than oneelement. But by hypothesis no such set exists, and so either Y = X, andthen K is transitive, or every orbit has order 1 in which case K = 〈e〉— the kernel of the action of a permutation group is 〈e〉 by definition.
2
We shall illustrate these results with three applications, more are givenin Chapter 12. First we give another proof of the simplicity of A5. This proofuses Cauchy’s Theorem (Theorem 6.2) whose proof only requires some basicaction properties, and so is independent of the work presented in this section.
Theorem 5.39 The group A5 is simple.
Proof. Suppose K / A5 and K 6= 〈e〉. By Problem 5.29(ii), A5 is3-transitive, and so 2-transitive; see comment on page 356. Hence byCorollary 5.37 it is primitive, and by Theorem 5.38 the normal sub-group K is transitive on {1, 2, 3, 4, 5}. Further by Corollary 5.31 wehave 5 | o(K), and so by Cauchy’s Theorem (Theorem 6.2), it followsthat K contains a 5-cycle which we can take to be (1, 2, 3, 4, 5). ButK / A5, and so K contains the twelve 5-cycles which are conjugate to(1, 2, 3, 4, 5), see Problem 3.3. The subgroup K also contains e, that isK contains at least 13 elements, but we have seen (page 101) that A5
has no proper subgroup of order greater than 12. Therefore K = A5,and the result follows. 2
Using some further permutation group properties which we have not devel-oped (they involve so-called regular normal subgroups), the above proof canbe extended to show that An is simple for all n ≥ 5; see Robinson [1982],page 195.
For our second illustration the reader will need to read Section 11.1 first,it deals with the notion of solubility. It can be shown that if G is a solubleprimitive permutation group then it has prime-power degree. This in turncan be used to show that G can be interpreted as a affine group (that is alinear group which includes translations) over a field of prime-power degree.As with most of the material in this section further details can be found inChapter 7 of Robinson [1982].
Lastly we use this work to give a group simplicity criterion which haswide applicability. It can be used to establish the simplicity several classes ofclassical groups including the linear groups Ln(q), and some Mathieu groups;see Chapter 12.
Theorem 5.40 (Iwasawa’s Lemma) Suppose
(a) G is a perfect group (that is G′ = G), and
(b) G acts faithfully (Definition 5.28) and primitively on a set X.
If there exists an Abelian subgroup J of G, which is normal in stabG(x) wherex ∈ X, whose normal closure J∗ in G is G itself, then G is simple.
The normal closure of a group was introduced in Problem 2.25, this problemgives

358 5 Actions and the Orbit-stabiliser Theorem
J∗ = 〈g−1Jg : g ∈ G〉.
Proof. Suppose the subgroup K satisfies 〈e〉 < K / G, we prove thetheorem by showing that K = G. By Problem 5.27, K acts transitivelyon X, and so by Problem 5.28
G = K stabG(x). (5.12)
Also by Supposition (b), if g ∈ G, then for all i there exist gi ∈ G andji ∈ J with
g =∏
ig−1i jigi. (5.13)
By (5.12) we can write gi = kiai where ki ∈ K and ai ∈ stabG(x).Hence as J / stabG(x), equation (5.13) gives
g =∏
ik−1i a−1i jiaiki ∈ KJK ≤ KJ
as K ≤ JK. This holds for all g ∈ G hence
G = KJ. (5.14)
Applying the Second Isomorphism Theorem (Theorem 4.15) to (5.14)we obtain
J/(J ∩K) ' KJ/K = G/K.
Now J is Abelian by supposition and, as a factor group of an Abeliangroup is itself Abelian, we also have G/K is Abelian. By Problem 4.6this shows that G′ ≤ K. But by (a) G′ = G, so K = G as required. 2
This result can be strengthened by replacing the condition ‘J is Abelian’ bythe condition ‘J is soluble’; see Issacs (2008), page 252. In Web Section 12.6we shall use this lemma to reprove the simplicity of the linear groups Ln(q)in all cases except n = 2 and q < 4.
5.5 Problems 5W
Problem 5.27 Suppose G acts on the set X which has more than oneelement, and H ≤ G. For x ∈ X, let x\H = {x\h : h ∈ H}.
(i) If x, y ∈ X and x\H ∩ y\H 6= ∅, show that x\H = y\H.
(ii) If H / G show that x\H is a block in X for each x ∈ X. For thedefinition of a block see Definition 5.33.
(iii) Now suppose 〈e〉 < H / G. Show that the action of H on X istransitive if the action of G on X is both faithful and primitive. Secondly,show that o(X) | o(H). (Hint. Use (ii) to show that, for x ∈ X, x\H equalseither ∅, {x} or X, and use the given conditions to show that the first twocases are impossible.)

5.5 Problems 5W 359
Problem 5.28 (i) Suppose K / G, G acts on the set X, and K actstransitively on X, show that for all x ∈ X
G = KstabG(x).
(Hint. Note that as K acts transitively on X, given x ∈ X and g ∈ G, thereexists k ∈ K with the property x\g = x\k.)
(ii) Use (i) to reprove Lemma 6.14 – the Frattini Argument.
Problem 5.29 (i) Show that Sn is sharply n-transitive and (n − 1)-transitive on the set {1, . . . , n}. Is this second transtivity property sharp?The symmetric groups are in fact the only groups with this property.
(ii) Secondly, show that An is sharply (n− 2)-transitive, provided n > 2.
(iii) Prove that Sn is primitive.
Problem 5.30 (i) Suppose G acts on X, K / G and O is the set of orbitsof K on X (that is we can naturally extend the action of G on X to an actionof G onto the set of all subsets X). Show that G acts transitively on O.
(ii) Suppose the permutation group G acts primitively on X and it con-tains a 2-cycle. Show that G ' SX .
Problem 5.31 (i) Using Theorem 5.22, prove that if G is a primitivepermutation group of degree m where 2 |m and m > 2, then 4 | o(G).
(ii) Suppose G is a permutation group, K is a minimum normal subgroupof G (page 235), and K is both transitive and Abelian, prove that G isprimitive.
Problem 5.32? Suppose G is a sharply 2-transitive group on X. Showthat its degree, that is o(X), is a power of some prime p using the followingmethod. Let o(X) = n. Apart from the neutral permutation, elements of Geither have no fixed points, or have exactly one fixed point. Let G(0) denotethe first of these sets and G(1) the second, so by hypothesis
G = {e} ∪G(0) ∪G(1).
Finally let p |n where p is prime.
(i) Show that if α is an element of order p in G, then α ∈ G(0).
(ii) By considering G(1) and the stabilisers of the elements of G, deduceo(G(0)) = n− 1.
(iii) Using Theorem 5.19, prove the result.
Problem 5.33 (i) Show that if the group G acts faithfully and primitivelyon a set X, then Φ(G) = 〈e〉. For details concerning the Frattini subgroupΦ(G) see Section 10.2.
(ii) Suppose G is a p-group which is not elementary Abelian. Show thatit cannot act both faithfully and primitively on a set X.

360 5 Actions and the Orbit-stabiliser Theorem
Problem 5.34 Suppose G is a nilpotent permutation group of order largerthan 1. (For a definition of nilpotency see Chapter 10.) Prove that G isprimitive if, and only if, the order of the set on which G is acting equals o(G)and this integer is prime.
Problem 5.35 Let G act on the set X where o(X) > 1. If this action isboth faithful and primitive, and if 〈e〉 < H/ G, show that H acts transitivelyin X, and deduce
o(X) | o(H).
(Hint. See Problem 5.27.)

6.5 Further Applications 361
6.5 Further Applications
Three further aspects of Sylow theory will be discussed in this section: (a)Intersections of Sylow subgroups, the radical, and Brodkey’s Theorem; (b)Burnside’s Normal Complement Theorem with some applications; and (c) atheorem of Holder, Burnside and Zassenhaus which classifies amongst othersall groups of square-free order.
Intersections of Sylow Subgroups, the Radical and
Brodkey’s Theorem
For a fixed prime p, the p-radical Op(G) of a finite group G is defined as theintersection of all Sylow p-subgroups Pi of G, it is an important example ofa normal subgroup of G; see pages 87, 133 and 222. The question arises: Inthis definition do we need to use all of the subgroups Pi to obtain the p-radical, or is a subset sufficient? Brodkey6 showed that if Pi is Abelian, thenthe intersection of just two is sufficient to define the p-radical provided the‘right’ two are chosen. The Abelianness condition is essential, see Problem6.24, also there are a number of applications.
We shall prove Brodkey’s result now. It is a corollary of the followinglemma which applies to all Sylow subgroups of a finite group.
Lemma 6.19 Suppose Q and R are Sylow p-subgroups of G with the fol-lowing property: If T = Q ∩R, then o(T ) is minimal as Q and R range overall pairs of Sylow p-subgroups Pi of G. The p-radical Op(G) is the uniquelargest subgroup of T which is normal in both Q and R.
Proof. Suppose K ≤ T, K / Q and K / R. If we can show that
K ≤ Pi for all Sylow p-subgroups Pi of G, (6.8)
then K ≤ Op(G) and the result follows.
By definition of the normaliser we have Q ≤ NG(K). Also Pi∩NG(K)is a p-subgroup of NG(K), and so it is contained in some Sylow p-subgroup of NG(K). Combining these propositions and using Sylow 2(Theorem 6.9) we can find a ∈ NG(K) to satisfy
Pi ∩NG(K) ≤ a−1Qa.
We also have R ≤ NG(K), and so a−1Ra ≤ NG(K). Hence
Pi ∩ a−1Ra = Pi ∩NG(K) ∩ a−1Ra ≤ a−1Qa ∩ a−1Ra = a−1Ta.
This gives
6 Brodkey, J. S. (1963), A note on finite groups with an Abelian Sylow subgroup. Proc.Amer. Math. Soc., 14, 132-3.

362 6 p-groups and Sylow Theory
T = a(a−1Ta)a−1 ≥ a(Pi ∩ a−1Ra)a−1 = aPia−1 ∩R. (6.9)
Now both aPia−1 and R are Sylow p-subgroups of G, and by (6.9) their
intersection is contained in T . But by definition, T is minimal for thisproperty, hence
aPia−1 ∩R = T, and so K ≤ T ≤ aPia−1.
This shows that a−1Ka ≤ Pi, but by assumption g−1Kg = K for allg ∈ G, hence (6.8) follows and the proof is complete. 2
We can now derive
Theorem 6.20 (Brodkey’s Theorem) If G has Abelian Sylow p-subgroupsPi, then i and j can be chosen so that
Pi ∩ Pj = Op(G).
Proof. If in Lemma 6.19 the Sylow p-subgroups Q and R are Abelian,then automatically the intersection T chosen there is normal in both ofthem, and so the result follows. 2
Corollary 6.21 Suppose P is an Abelian Sylow p-subgroup of G.
(i) o(Op(G)) ≥ o(P )2/o(G).
(ii) If o(P ) > [G : P ], then G is not simple provided o(G) 6= p.
Proof. (i) By Brodkey’s Theorem there exist Abelian Sylow p-subgroups Q and R of G satisfying Q∩R = Op(G). Hence by Theorem5.8 we have
o(G) ≥ o(QR) =o(Q)o(R)
o(Q ∩R)=
o(P )2
o(Op(G)),
and (i) follows.
(ii) By Problem 6.19(vi) and (i), Op(G) is a proper non-neutral nor-mal subgroup of G. Hence G is not simple. 2
For example if o(G) = 4p and p > 3, then G is not simple as p2 > 4p in thiscase. Some further examples are given in Problem 6.25.
In the printed text we also considered intersections of Sylow subgroupsin part of the proof of Theorem 6.13, and in Problems 6.8 and 6.17.
Burnside’s Normal Complement Theorem
We begin with
Definition 6.22 (i) Let H,J ≤ G, HJ = G and H∩J = 〈e〉. The subgroupJ is called a complement of H in G, and H is a complement of J in G.
(ii) If K / G, then G is called an extension of K by H if G/K ' H.
6.5 Further Applications 363
Notes. In (i), if H / G, then G/H ' J by the Second Isomorphism Theorem(Theorem 4.15), and so G is an extension of H by J ; and in (ii), K doesnot necessarily have a complement. One possible reason is that G may notcontain a subgroup isomorphic to H.
Some of the most important results in the theory concern the existence ofcomplements. These include the Schur-Zassenhaus Theorem to be proved inWeb Section 9.4, results about semi-direct products given in Chapter 7, andBurnside’s theorem to be proved now. This result gives a condition underwhich a Sylow subgroup has a (normal) complement, it has a number ofuseful applications, an example is given after the proof.
Theorem 6.23(17) (Burnside’s Normal Complement Theorem) If G isa finite group and P is a Sylow subgroup of G which satisfies the condition
P ≤ Z(NG(P )), (6.10)
then P has a normal complement in G.
The condition (6.10) is equivalent to the statement: CG(P ) = NG(P ); seeProblem 5.17(ii). The proof below uses the transfer, before proceeding thereader should review Web Section 4.6 which introduces this entity.
Proof. Note first that as P is a subgroup of a centre, it is Abelian. Let[G : P ] = m and let ξ denote the transfer of G to P , see Definition 4.26in Web Section 4.6. The map ξ is a homomorphism and we shall provethe theorem by showing that its kernel is a (normal) complement of P .Let a ∈ P . By Corollary 4.28, the value of aξ is given by
aξ =∏
rh−1r amrhr,
where {h1, . . . , hn} is a subset of a transversal, and 1 ≤ mr ≤ m. Foreach r both amr and h−1r amrhr belong to P by definition and Corollary4.28, and they are conjugate in CG(P ), for as P is Abelian it is a sub-group of CG(P ). Using Problem 6.10(ii) we see that, as these elementsbelong to CG(P ) and are conjugate in G, they are also conjugate inNG(P ), and so there exist jr ∈ NG(P ) with the property
h−1r amrhr = j−1r amrjr = amr .
This last equality follows by (6.10). Hence by Corollary 4.29
aξ = am for all a ∈ P where m =∑
rmr = [G : P ].
Suppose o(P ) = pt, then (m, pt) = 1 as P is a Sylow p-subgroup.Using the Euclidean Algorithm (Theorem B2), integers r and s can befound to satisfy rm+ spt = 1, and so as a ∈ P
a = armaspt
= (am)r.

364 6 p-groups and Sylow Theory
Rewriting this we have arξ = arm = a; that is ξ is surjective. LetK = ker ξ, then the First Isomorphism Theorem (Theorem 4.11) showsthat G/K ' P . So G = KP , and K ∩ P = 〈e〉, because we haveo(K) = [G : P ] = m and (m, pt) = 1. The theorem follows because akernel of a homomorphism, ξ in this case, is always normal. 2
Example. Let G be a non-Abelian group of order pq with p < q, and letP1, P2 ≤ G with o(Pi) = p, i = 1, 2, that is G has distinct Sylow p-subgroups.We have P1 = NG(P1) as P1 is non-normal, and so P1 = Z(NG(P1)) as P1
is Abelian. Hence the condition of Burnside’s theorem applies, and thereforeP1 has a normal complement of order q. This provides a second derivation ofTheorem 6.11.
Some consequences of Burnside’s theorem are given now, more will followin the problem section. The first is concerned with the smallest prime dividingthe order of a group.
Theorem 6.24 Suppose G is a group, p0 is the smallest prime dividingo(G), and P is a cyclic Sylow p0-subgroup of G, then P has a normal com-plement in G.
Proof. We have
(a) by the N/C-theorem (Theorem 5.26), NG(P )/CG(P ) is iso-morphic to a subgroup of AutP ;
(b) by Theorem 4.23 and later comments, o(AutP ) = pn−10 (p0−1)as P is cyclic; and
(c) CG(P ) ≥ P as P is Abelian (cyclic).
Now as P is a Sylow p0-subgroup, (c) implies
p0 - o(NG(P )/CG(P )), and so o(NG(P )/CG(P )) | p0 − 1
by (b). But p0 is the smallest prime dividing o(G), hence
o(NG(P )/CG(P )) = 1.
Therefore NG(P ) = CG(P ), and by Problem 5.17, this shows that thecondition for Burnside’s theorem (Theorem 6.23) applies, hence P hasa normal complement. 2
In Problem 2.19 we showed that if G has a subgroup H with index 2,then H / G. The theorem above shows that H always exists if its order isodd. Reader: What happens if o(H) is even?
Corollary 6.25 If o(G) = 2m where m is odd, then G has a normalsubgroup K with o(K) = m.
Proof. This follows immediately from Theorem 6.24, as the Sylow2-subgroup of G is necessarily cyclic. 2

6.5 Further Applications 365
This result can be extended to show that if G is simple and non-Abelian,then either 8 or 12 divides o(G) as we show now.
Theorem 6.26 If G is a non-Abelian simple group and p0 is the smallestprime dividing o(G), then either p30 | o(G), or 12 | o(G).
Proof. Let P be a Sylow p0-subgroup of G. By Theorem 6.24, it is notcyclic, and so
(a) either p30 | o(G), or
(b) P is a non-cyclic group of order p20, that is P ' Cp0 ×Cp0 , seeSection 7.2.
If (a) holds the result follows, and if (b) holds P is an elementaryAbelian p0-group (Problem 4.18(i)). In this case, by Problem 4.18(iii)we have
o(AutP ) = p0(p0 + 1)(p0 − 1)2 = t,
say. By the N/C-theorem (Theorem 5.26), o(NG(P )/CG(P )) is a divisorof t which is larger than 1 (by Burnside’s theorem and the hypothesis).Also p0 - o(NG(P )/CG(P )) as P ≤ CG(P ) and P is a Sylow subgroup.Hence, as p0 is the smallest prime divisor of o(G), it follows that p0+1 | t.If p0 is odd this gives a contradiction because the smallest prime divisorof t is at least p0+2. Hence p0 = 2, then t = o(AutP ) = 6, which showsfinally that 12 | o(G) as required. 2
The Feit-Thompson Odd Order Theorem states that every group of com-posite odd order contains a proper non-neutral normal subgroup. This to-gether with Theorem 6.26 shows that the order of every non-Abelian simplegroup is divisible by 8 or 12. In fact, this can be improved to: The order ofevery such group is divisible by 12, 16 or 56. There exists one class of simplegroups, the so-called Suzuki groups Sz(22n+1) with n > 0 (Web Chapter 14),whose orders are divisible by 8 but not by 3.
Our next application provides another method for proving that groupsof certain orders cannot be simple.
Theorem 6.27 If G is simple, o(G) = pm > p, p - m, and P is a Sylowp-subgroup of G, then CG(P ) < NG(P ) < G and [NG(P ) : CG(P )] | p− 1.
Proof. By Burnside’s and the N/C theorems (Theorems 6.23 and 5.26)we have CG(P ) < NG(P ) and, by Sylow 3, NG(P ) < G, both as G issimple. Further P ≤ CG(P ) because P is Abelian, and o(AutP ) = p−1as o(P ) = p. Hence the N/C-theorem gives the second result. 2
Example. There are no simple groups of order 396.
We have 396 = 22 · 32 · 11, and so a group of order 396 will have a Sylow11-subgroup P1, say. If G is simple, then n11 = 12 and o(NG(P1)) = 33 bySylow 3 and 4. But by Theorem 6.27, o(CG(P1)) = 11, as o(CG(P1)) is atleast 11 because P1 ≤ CG(P1), and so [NG(P1) : CG(P1)] = 3 which clearlydoes not divide 10. This contradiction shows that a group of order 396 musthave a normal subgroup of order 11, and therefore cannot be simple. Somefurther examples are given in Problem 6.28.

366 6 p-groups and Sylow Theory
Groups with Cyclic Sylow Subgroups
As a further application of Burnside’s theorem (Theorem 6.23) we prove thefollowing Classification Theorem. Classification theorems are important inthe quest to describe all groups, amongst other consequences this particularresult will determine (that is, give representations of) all groups with square-free order. There is a unique Abelian group for each fixed square-free order,that is the cyclic group with this order; see Section 7.2. This uniqueness doesnot carry over to the non-Abelian case as will be seen in the example atthe end of this section. Although this classification result is a consequenceof Burnside’s theorem, it also relies on results proved in Chapter 11; there isno circularity here because these (solubility) results follow directly from thework presented in Chapters 2 and 4.
We begin with
Definition 6.28 A group is called metacyclic, or sometimes Frobenius(Web section 14.3), if it can be represented as an extension (Definition 6.19)of one cyclic group by another cyclic group.
The cyclic and dihedral groups are examples of metacyclic groups. Reader:Give the cyclic subgroups in the dihedral case.
Let G be a finite group all of whose Sylow subgroups are cyclic; notethat all subgroups and all factor groups of finite cyclic groups are themselvesfinite and cyclic by Theorem 4.20. We also have in this case:
(a) If G is Abelian, then G is cyclic, this follows from the Sylow theoryand Problem 4.15(ii), this also follows from the direct product theory.
(b) All Sylow subgroups of subgroups of G are cyclic; by Sylow 5, everyp-subgroup of G is contained in a Sylow p-subgroup of G.
(c) All Sylow subgroups of factor groups of G are cyclic. For if K / G,a Sylow subgroup of G/K has the form PK/K where P is a Sylowsubgroup of G (Problem 6.10(iii)), and by the Second IsomorphismTheorem (Theorem 4.15), PK/K ' P/(P ∩K), but P is cyclic and soPK/K is also cyclic.
The last preliminary fact we need is
Lemma 6.29 If G is finite and all of its Sylow subgroups are cyclic, thenboth G′ and G/G′ are cyclic, where G′ denotes the derived subgroup of G.
This result, which is due to Zassenhaus, implies that G is metacyclic if itsatisfies the conditions of the lemma. The proof relies on Theorem 6.23 andsome basic work given in Problems 11.12 and 11.13. For a different proof seeIssacs [2008], page 160. As noted above there is no circularity here becauseall of the facts concerning solubility used in these proofs are elementary con-sequences of the isomorphism theorems given in Chapter 4. But it should benoted that the main result used in the proof of Lemma 6.29 is Burnside’sNormal Complement Theorem (Theorem 6.23).

6.5 Further Applications 367
Using these preliminary facts we can now show that a finite group withcyclic Sylow subgroups is metacyclic. In fact we have the following strongerresult due to Holder, Burnside and Zassenhaus which involves four number-theoretic conditions.
Theorem 6.30(18) If G is a finite group all of whose Sylow subgroups arecyclic, then G has the presentation
G ' 〈a, b | am = bn = e, b−1ab = ar〉,
where
(i) (m,n(r − 1)) = 1, (ii) rn ≡ 1 (mod m),
(iii) 0 ≤ r < m, (iv) m is odd.
If G is a p-group, or if it is Abelian, then m = r = 1 and a = e in therepresentation above, andG is cyclic. Also the converse of this theorem clearlyfollows from the preliminary results (b) and (c) given on the previous page.The condition is necessary. For example the order of A5, that is 22 · 3 · 5,satisfies the conditions (i) to (iv) above with m = 5 , but the theorem doesnot apply because A5 has a non-cyclic Sylow subgroup.
Proof. By Lemma 6.29 we may suppose
G′ = 〈a〉 / G and G/G′ = 〈bG′〉, (6.11)
for suitably chosen a, b ∈ G. Let o(G′) = m and o(G/G′) = n, and soby Lagrange’s Theorem (Theorem 2.27), o(G) = mn and o(a) = m. Wewill show below that (m,n) = 1. By (6.11) we have
G = 〈a, b〉 and b−1ab = ar, (6.12)
for some r satisfying 0 ≤ r < m as o(a) = m. The second equation in(6.12) gives [a, b] = a−1b−1ab = ar−1. Let
J = 〈ar−1〉.
We show next that J = G′. By Problem 4.22(v), J char G′, and so asG′ / G (Problem 2.16) we have J / G by Problem 4.22(iv). By (6.12)this shows that G/J = 〈aJ, bJ〉, and
[aJ, bJ ] = (aJ)−1(bJ)−1(aJ)(bJ) = [a, b]J = J,
as [a, b] ∈ J . This proves that G/J is generated by two elements whichcommute, hence it is Abelian. Therefore, by Problem 4.6(ii), we haveG′ ≤ J and so J = G′ because J ≤ G′ by definition. Therefore aso(a) = m we have
〈ar−1〉 = J = G′ = 〈a〉 which gives (r − 1,m) = 1. (6.13)

368 6 p-groups and Sylow Theory
Next we show that 〈b〉 is a complement of G′ in G. As o(G/G′) = nwe have bn ∈ G′ and so bn = as for some integer s. Therefore, asb−1ab = ar,
as = bn = b−1(bn)b = b−1(as)b = ars which gives a(r−1)s = e.
Now o(a) = m, and so m | (r − 1)s; applying (6.13) this gives m | s and
bn = e with o(b) = n,
as G/G′ = 〈bG′〉 and o(G/G′) = n. Further, as G = 〈b〉G′ we haveusing the Second Isomorphism Theorem (Theorem 4.15)
G/G′ = 〈b〉G′/G′ ' 〈b〉/(〈b〉 ∩G′)
and, as o(G/G′) = o(〈b〉), this shows that
〈b〉 ∩G′ = 〈e〉.
Therefore 〈b〉 is a complement of G′ in G.
Lastly we prove that (m,n) = 1. Suppose not, so there exists a primeq dividing both m and n, and
o(am/q) = q = o(bn/q).
Now 〈am/q〉 / G because J = 〈a〉 / G, so if we let
L = 〈am/q〉〈bn/q〉, then L ≤ G and o(L) = q2.
By Sylow 5, L ≤ Q where Q is a Sylow q-subgroup of G. By hypothesisQ is cyclic, and so it has a unique subgroup of order q by Theorem 4.20.This is impossible because both 〈am/q〉 and 〈bn/q〉 are subgroups of Qof order q. Hence (m,n) = 1. The reader should now check that theconditions (i) to (iv) are satisfied. 2
As noted above an important special case of this result is:
Every group with square-free order is metacyclic,
for in this case all Sylow subgroups are necessarily cyclic. But note thatseveral non-isomorphic groups may be involved; that is there may be severaldistinct solutions to the number-theoretic conditions (i) to (iv) in Theorem6.30 for a group of given order. Let
Fm,n,r = 〈a, b | am = bn = e, b−1ab = ar〉.
We usually drop the suffix ‘r’ when there is only one value, so we have F1,n,1 =F1,n ' Cn and Fm,2,m−1 = Fm,2 ' Dm. Consider for example groups of order42 = 2·3·7, and let m,n and r satisfy conditions (i) to (iv) in Theorem 6.30. Inthis case m = 1, 3, 7 or 21; so as just noted we only need to consider the cases
6.6 Problems 6W 369
m = 3 or 7. If m = 3, then n = 14, and 2 is the only possible value for r; hencewe obtain the group F3,14. If m = 7, then n = 6 and by Fermat’s Theorem(Theorem B10) r = (1), 2, 3, 4, 5 or 6, suggesting possibly five new groups.But only three are non-isomorphic, they are F7,6,2 ' F7,6,4, F7,6,3 ' F7,6,5
and F7,6,6; the reader should check these facts by looking at their centres.Therefore there are six non-isomorphic groups of order 42, they are C42, D21
and the four Frobenius groups listed above, all of which are metacyclic. Somefurther examples are given in Problem 6.31.
6.6 Problems 6W
Problem 6.24 The Abelianness condition in Brodkey’s Theorem (Theo-rem 6.20) is essential, prove this using the following example. Let J = C3×C3.The automorphism group Aut J of J is isomorphic to GL3(2) with order 48,and this group has a Sylow 2-subgroup A, say, of order 16. Form the semi-direct product of J by A, show that its 2-radical is neutral, and so completethe proof.
Problem 6.25 (i) Use Corollary 6.22 to prove that the following groupsare not simple.
(a) A group of order 12p where p > 12.
(b) A group of order p2q2 where q > p.
(c) All groups of order 1764, 2205 and 2352.
(ii) Prove that if Op(G) = 〈e〉, then Sylow p-subgroups P1 and P2 of Gexist satisfying Z(P1) ∩ Z(P2) = 〈e〉.
Problem 6.26 (i) Suppose p is odd and it is the smallest prime dividingo(G). Show that if p3 - o(G), then G has a normal p-complement.
(ii) Suppose G is simple and it has an Abelian Sylow 2-subgroup of order8, prove that 7 | o(G). The groups L2(8) and J1 are examples (Chapter 12including its Web section).
Problem 6.27 (i) Show that the normal complement of the Sylow p-subgroup P given by Burnside’s Theorem can be taken as Op′(G) where p′
denotes the set of primes dividing o(G) except p itself.
(ii) Prove that a Sylow 2-subgroup of a finite simple group cannot becyclic.
Problem 6.28 Show that there are no simple groups with orders 264, 945or 3864.
Problem 6.29 Prove that a group of order p3q is not simple using thefollowing method. First show that p < q, then use the Sylow theory andBurnside’s Theorem (Theorem 6.23) to obtain nq = p2, and lastly deducep = 2 and q = 3. Note that np need not equal 1, give an example.

370 6 p-groups and Sylow Theory
Problem 6.30 Suppose o(G) = p2qr where p, q and r are distinct primes.Show that if G is simple, then G ' A5. One method is as follows.
First show we may assume that p < q < r;
If P is a Sylow p-subgroup, show that P ' Cp × Cp, and[NG(P ) : CG(P )] equals q or r;
Deduce p = 2 and q = 3, and so prove that G ' A5.
Problem 6.31 Find all groups of order 105, 210 and 474, see the table onpage 294.
Problem 6.32 Prove that no group of composite square-free order canbe simple. Use this to show that if o(G) is square-free, and p? is the largestprime factor of this order, then G has a normal Sylow p?-subgroup.
Problem 6.33 (i) Let p be the smallest prime dividing o(G). Suppose Pis a cyclic Sylow p-subgroup of G, show that G has a normal complement.
(ii) Use (i) to prove that if all of the Sylow p-subgroups of G are cyclic,then G is soluble (Chapter 11). Further show that if n | o(G), then G has asubgroup of order n, and any two such subgroups are conjugate in G.
Problem 6.34 Suppose G is a finite group with the property that for allof its Abelian subgroups J we have NG(J) = CG(J). Show that G is Abelian.
Problem 6.35 Suppose G is simple, 2r | o(G) and 2r+1 - o(G). Show that ifr = 1 or 2, then 3 | o(G). Note that for the only simple groups where 3 - o(G),the Suzuki groups Sz(22n+1), we have r ≥ 6.
Problem 6.36 Let p be a prime. If p2 | o(G), show that p | o(AutG). (Hint.Use Corollary 5.27, Burnside’s Theorem, and Theorems 7.12, 4.23 and 3.15.)
Problem 6.37 Classify all groups of order pqr where p, q and r are primesand p < q < r. (Hint. Use Problem 6.32.)
Problem 6.38 Suppose H be a Hall subgroup of G (Chapter 11) with theproperty
H ≤ Z(NG(H)).
Prove that G has normal p-complements for all primes p dividing o(H). (Hint.Use induction. Prove first that if P is a Sylow subgroup of H and NG(P ) < G,then P ≤ Z(NG(P )). Secondly prove that if P / G and Q is a Sylow subgroupof H which satisfies NG(Q) < G, then P ≤ Z(NG(Q)).

7.5 Infinite Abelian Groups 371
7.5 — Infinite Abelian Groups
The printed text is mainly concerned with finite groups. Infinite groups likethe rational numbers Q have many important properties, and so some men-tion of them is needed. This Web Section lists the basic facts in the Abeliancase, no proofs will be given; the reader who wishes to discover more shouldconsult Kaplansky (1969), Fuchs (1970, 1973), Chapter 8 of Rose (1978), orChapter 10 of Rotman (1994).
We begin by extending the notion of direct product to the case where aninfinite number of factors is involved. There are two types which we call thecartesian product and the direct product. Suppose I = {. . . , i0, i1, . . . } is anindex set and for each in ∈ I we are given a group Gin . As in the finite casewe first form the set-theoretic cartesian product of the underlying sets of thegroups Gin :
G = · · · ×Gi0 ×Gi1 × . . . ,we call the elements of G ‘vectors’. Secondly we introduce an operation � onG using the same procedure as in Definition 7.1.
Definition 7.19 (i) If a = ( . . . , ai0 , ai1 , . . . ) and b = ( . . . , bi0 , bi1 , . . . ) arevectors in G, then we define
a� b = ( . . . , ai0bi0 , ai1bi1 , . . . ), (7.13)
where ain , bin ∈ Gin for all n. The collection of all vectors of G with thisoperation � forms a group called the cartesian product which is denoted by⊗
in∈IGin .
(ii) Let H be the subset of G of those vectors that have only a finitenumber of non-neutral entries. The set H with the operation (7.13) forms agroup called the direct product which is denoted by∏
in∈IGin .
Note that ∏in∈I
Gin /⊗
in∈IGin ,
as the reader can easily check. The properties listed in Lemma 7.5 for finitedirect products also apply to both the cartesian and the (infinite) directproduct.
From now on all groups discussed in this section are Abelian.
Our first result concerns the extension of the Fundamental Theorem ofAbelian Groups (Theorem 7.12) to the infinite case. A group is said to befinitely generated if it has a presentation (Section 3.4 and Web Section 4.7)with a finite number of generating elements. The Fundamental Theorem ex-tends to this case for we have

372 Chapter 7 – Products and Abelian Groups
Theorem 7.20 A finitely generated Abelian group can be expressed as adirect product of cyclic groups of prime power and/or infinite order.
The proof of this result is similar to the second proof of the finite case givenin Section 7.2.
Divisibility
Many infinite Abelian groups are not finitely generated, for instance the ra-tional numbers Q (Problem 3.17). But this group has another importantproperty – it is divisible; that is for each positive integer m and each rationalnumber a/b ∈ Q, there exists another rational number c/d ∈ Q with the prop-erty m(c/d) = a/b (put c = a and d = mb). In the standard ‘multiplicative’notation:
For all positive integers m, every element in Q has an ‘m-th(additive) root’ in Q.
With torsion to be defined below, divisibility plays a major role in the Abeliantheory.
Definition 7.21 An Abelian groupG, with as usual its operation expressedmultiplicatively using concatenation, is called divisible if for all g ∈ G and allpositive integers m, there exists another element h ∈ G satisfying
hm = g.
Examples. The following are divisible groups: 〈e〉, Q (as above), R, C (inthese two cases it is the additive group that is divisible), the multiplicativegroup of the non-zero complex numbers,7 and Cp∞ (Problem 6.7). A factorgroup of a divisible group is divisible, and if Gn, n = . . . , 0, 1, . . . is a collec-tion of divisible groups, then both the cartesian and the direct products ofthe Gn are divisible. A subgroup of a divisible group need not be divisible;for example Z ≤ Q, and Z is not divisible.
Further we set
Definition 7.22 (i) Given a group G, the subgroup generated by all ele-ments of all divisible subgroups of G is denoted by dG, it is called the divisiblesubgroup of G.
(ii) A group G is called reduced if, and only if, dG = 〈e〉.Clearly G is divisible if, and only if, dG = G. It is not difficult to prove that
Theorem 7.23 Every Abelian group G has the direct product decomposi-tion
G = dG×Rwhere R is reduced.
7 This follows because C is an algebraically closed field.

7.5 Infinite Abelian Groups 373
Corollary 7.24 Every group is isomorphic to a subgroup of a divisiblegroup.
It is possible to give a characterisation of divisible groups as follows.
Theorem 7.25 Every divisible group can be expressed as a direct productof copies of Q, and copies of Cp∞ for suitably chosen primes p.
The groups Cp∞ for p = 2, 3, . . . were defined in Problem 6.7. One conse-quence of this theorem implies that the real numbers R can be expressed asa direct product of copies of Q, but uncountably many copies are needed.This is related to a topic in real analysis called the Hamel Basis; see forexample Introductory Real Analysis by Kolmogorov and Fomin (Dover, NewYork, 1970). No similar characterisation of reduced groups exists, some aredirect products of cyclic groups but many others are not. The next topic willprovide some more information on this question.
Torsion
The second major distinction in the Abelian theory is between torsion andtorsion-free or; in our previous terminology, between finite and infinite order.
Definition 7.26 (i) The torsion subgroup tG of a group G (with operationexpressed multiplicatively using concatenation) is given by
tG = {g ∈ G : gm = e for some positive integer m}.
(ii) A group G is called torsion if tG = G, and torsion-free if tG = 〈e〉.It is easy to prove that tG ≤ G for all G. Every finite group is torsion,Q is an example of a torsion-free group, whilst R∗, the non-zero reals withmultiplication, is neither torsion nor torsion-free; reader, why?
The following result is easily proved.
Theorem 7.27 For all Abelian groups G, the factor group G/tG is torsion-free.
To put this another way: Every Abelian group is an extension of a torsiongroup by a torsion-free group. But this is not as strong as Theorem 7.23 forthere exist groups whose torsion subgroups are not direct factors. One suchexample is the cartesian product over all primes p of the cyclic groups Cp.
Properties of both torsion and torsion-free groups have been investigated,a fairly clear characterisation of torsion groups has been given, but onlylimited information is available on the structure of torsion-free groups. In1945 the Russian mathematician Kulikov proved
Theorem 7.28 Every Abelian torsion group G can be expressed as anextension of a direct product of cyclic groups by a divisible group.
This result is derived using so called basic subgroups, we shall define thesenow. First we need (remember that Gn = {gn : g ∈ G})

374 Chapter 7 – Products and Abelian Groups
Definition 7.29 A subgroup J of a group G is called pure in G if
J ∩Gn = Jn for all n ∈ Z.
We always have J ∩Gn ≥ Jn, so it is the reverse inequality that is importanthere. The following facts are not difficult to prove.
(a) In a direct product G = H × J , both H and J are pure in G.
(b) If J ≤ G and G/J is torsion-free, then J is pure in G. Hence thetorsion subgroup tG of G is pure in G.
(c) If J is pure in G and J ≤ H ≤ G, then H/J is pure in G/J if, andonly if, H is pure in G.
(d) A non-divisible p-group contains a pure non-neutral cyclic subgroup.
(e) Suppose G is a p-group, X is an independent subset of G (Problem7.14), 〈X〉 is pure in G, and no proper superset of X has these proper-ties (so X is a maximal pure-independent subset of G), then G/〈X〉 isdivisible.
We can now define ‘basic’ by
Definition 7.30 A subgroup J of an Abelian torsion group G is calledbasic if the following three conditions hold.
(i) J is a pure subgroup of G,
(ii) J is a direct product of cyclic groups,
(iii) the factor group G/J is divisible.
Using Problem 7.14 and the properties (a) to (e) above it is relatively easyto prove that all torsion groups possess basic subgroups and, using this,Kulikov’s Theorem (Theorem 7.28) follows directly.
There are two important corollaries.
Corollary 7.31 (i) If G has finite exponent (Definition 2.19), then G isisomorphic to a direct product of cyclic groups.
(ii) If G is indecomposable, that is it cannot be expressed as a direct productwith non-neutral factors, then G is either torsion or torsion-free.
The first of these corollaries shows that an elementary Abelian p-group (Prob-lem 4.18) can be represented as a direct product of copies of Cp and, byCorollary 2.12, all groups with exponent 2 have this property. The rationalgroup Q is an example of an indecomposable group, it is torsion-free. ButR∗ is an example of a group which is neither torsion nor torsion-free, so bythe second corollary it can be expressed as a direct product, in this case thefactors are isomorphic to R+ and C2.
Lastly in this brief survey we shall consider one aspect of the theory oftorsion-free groups. Every torsion-free group can be treated as a subgroup ofthe multiplicative group of a vector space over Q, see Corollary 7.24. Hencewe make the following

7.5 Infinite Abelian Groups 375
Definition 7.32 For a torsion-free group G, the rank is the number ofelements in a maximal independent subset (Problem 7.14) of the vector spaceover Q of which G is a subgroup.
There are many unanswered questions about rank n groups for large n,but the case n = 1 is well known. In this case it is the subgroups of Q thatare being investigated. We noted in Problem 2.11(ii) that the following aresubgroups of Q:
(i) Z,
(ii) the set of all rational numbers of the form a/2n where a, n ∈ Z,a is odd and n ≥ 0, the so-called dyadic rationals,
(iii) the set of all rational numbers with square-free denominators.
Many variations on these examples exist hence we make the following
Definition 7.33 If a/b ∈ Q\{0} with (a, b) = 1, p is a prime, a = pra′, b =psb′ and (a′, p) = (b′, p) = 1, then the p-height hp(a/b) of a/b equals s − r;and we set hp(0) = 0.
So the p-height of an integer is less than or equal to zero, the 2-height of thedyadic rational a/2n is n, and the p-height of a rational with a square-freedenominator is at most 1.
We also make
Definition 7.34 (i) A sequence (a0, a1, . . . ) where each ai denotes a non-negative integer or the symbol ∞ is called a characteristic.
(ii) Two characteristics are said to be equivalent if
(a) the symbol ∞ occurs in the same position in each characteristic,and
(b) the finite entries differ (that is they are replaced by other finiteentries) at only finite many positions.
It is clear that Definition 7.34 defines an equivalence relation on the setof characteristics. We can attach a characteristic to each subgroup of Q asfollows. If H ≤ Q, let hp(H) denote the least upper bound (which may be∞) of hp(a/b) for a/b ∈ H, then the characteristic of H is defined as
(h2(H), h3(H), . . . , hpi(H), . . . ).
For the group Q itself the characteristic is (∞,∞, . . . ) because the num-bers 1/pn belong to Q for all primes p and all positive integers n. Also thecharacteristic of Z is (0, 0, 0, . . . ), the characteristic of the dyadic rationalsis (∞, 0, 0, . . . ), and the characteristic of the rationals with square-free de-nominators is (1, 1, 1, . . . ); the reader should check these statements. It iseasily shown that the characteristic of two elements of a subgroup H of Qare equivalent. For instance in Z the characteristic of 0 is (0, 0, 0, . . . ) whilstthe characteristic of 432, say, is (−4,−3, 0, 0, . . . ).
For the rank 1 case we have

376 Chapter 7 – Products and Abelian Groups
Theorem 7.35 (i) Two subgroups of Q are isomorphic if, and only if, theyhave equivalent characteristics.
(ii) For each equivalence class of characteristics there exists a subgroup of Qwith a characteristic in this class.
It follows from this result that the group Q has uncountably many subgroupsas there are uncountably many inequivalent characteristics. As an exercisewrite down as many subgroups of Q as you can.
For further developments, proofs of the theorems given above, examples,and problems the reader should read one or more of the references given atthe beginning of this section.

Schur-Zassenhaus Theorem 377
9.4W Schur-Zassenhaus Theorem
In this Web Section we establish one of the most important theorems offinite group theory — the Schur-Zassenhaus Theorem which gives a conditionunder which complements of Hall subgroups exist. A Hall subgroup H of afinite group G, is one whose order has no common factor (except 1) with itsindex, that is
(o(H), [G : H]) = 1.
Sylow subgroups are examples of Hall subgroups, also S4 is isomorphic toa Hall subgroup of S5 for we have o(S4) = 24 and [S5 : S4] = 5. We shallconsider these subgroups in more detail in Chapter 11. The Schur-ZassenhausTheorem says that if H is a normal Hall subgroup of G, then H always hasat least one complement in G, see Definition 6.19, and secondly, all suchsubgroups are conjugate. For example, it shows that if P is a normal Sylowsubgroup of G, then P has a complement J and G = PJ . The normalitycondition is essential as the following example shows. Let G = A5 and J =〈(1, 2, 3)〉 ' C3, then o(J) = 3, [G : J ] = 20 and (20, 3) = 1, but A5 does notcontain a subgroup of order 20, and so no complement of J can exist.
The main point to note here is that if G has a normal Hall subgroup K,then G is isomorphic to a semi-direct product of K by a subgroup isomorphicto G/K; we sometimes say that G is split over K. In this case the extensionwhich passes from K to G is of a fairly straightforward and well-understoodtype; the situation can become much more complicated if o(K) and o(G/K)have common factors. The theorem was proved by Schur about a century agoin the case when G/K is cyclic, and the full result was proved by Zassenhausin 1937 using some ideas from cohomology theory for the Abelian case whichwe shall introduce in the latter part of the proof. We also give a second proofof this case using so-called crossed homomorphisms.
Theorem 9.19 (Schur-Zassenhaus Theorem) Suppose G is a finite group,o(G) = mn, (m,n) = 1,K / G and o(K) = m, then K has a complement Hin G with G = KH and o(H) = n.
The derivation of this result is quite long and introduces some new notions,it has been split into a number of manageable stages and relies on many ofthe results proved earlier. As noted above we give two proofs for the mainAbelian case.
Proof. Stage 1 – It is sufficient to show G has a subgroup H that hasorder n.
We have K / G and o(K) = m. If H exists with o(H) = n then, byLagrange’s Theorem (Theorem 2.27) K ∩H = 〈e〉 (no non-neutral ele-ment in K has an order dividing n, and vice versa), and so by Theorem5.8, o(KH) = o(H)o(K) = o(G) which shows that KH = G.
The main proof is by induction on o(G), so if o(G1) < o(G) and G1 has anormal Hall subgroup K1, then K1 has a complement in G1.

378 Chapter 9 Jordan-Holder Theorem and the Extension Problem
Stage 2 – We may assume that K has a normal Sylow subgroup P .
Suppose P is a Sylow subgroup of K (Theorem 6.7). As K / G, theFrattini Argument (Lemma 6.14) shows that G = NG(P )K. Also byProblem 5.13(iii) and the normality of K we have
NK(P ) = NG(P ) ∩K / NG(P ),
and so by the Second Isomorphism Theorem (Theorem 4.15),
G/K = NG(P )K/K ' NG(P )/(NG(P ) ∩K) = NG(P )/NK(P ).
By hypothesis this shows that [NG(P ) : NK(P )] = n. Further, asNK(P ) ≤ K we have o(NK(P )) | o(K). These two statements imply thatNK(P ) is a normal Hall subgroup of NG(P ). Now if NG(P ) < G, theinductive hypothesis provides a subgroup J of NG(P ) with o(J) = n,and by subgroup transitivity, J is also a subgroup of G of order n. Theresult follows in this case, and so we may assume that NG(P ) = G, thatis P / G.
Stage 3 – We may assume that K is a Sylow subgroup P .
By Stage 2 we may suppose P / G. As K / G, the CorrespondenceTheorem (Theorem 4.16) gives K/P / G/P , and so [G/P : K/P ] = [G :K] = n. Now o(K/P ) | o(K) by Lagrange’s Theorem (Theorem 2.27),and o(G/P ) < o(G), hence the inductive hypothesis again provides asubgroup of the form L/P with order n and where P / L ≤ G (note weare assuming that P / G). Now L ∩K is a subgroup of both L and K,and so o(L ∩K) divides both o(L) and o(K). But
o(L) = n · o(P ) and (n, o(K)) = 1, hence o(L ∩K) ≤ o(P ).
On the other hand, P ≤ L and P ≤ K, and so P ≤ L ∩K. Togetherthese show that L ∩K = P which in turn gives L < G. Hence as o(P )and o(L/P ) are coprime and o(L/P ) = n, the inductive hypothesisprovides a subgroup of L with order n which is also a subgroup of G.Therefore we may assume that K = P .
Stage 4 – The case when K is a non-Abelian p-group.
By Lemma 5.21, 〈e〉 6= Z(K) / K, and by Problem 4.16, Z(K) / G.Further by the Correspondence Theorem (Theorem 4.16), K/Z(K) isa normal subgroup of G/Z(K) with order n. Therefore the inductivehypothesis provides a subgroup of the form
M/Z(K) of G/Z(K) with order n, and where Z(K) / M ≤ G.
As in Stage 3, we have M ∩ K = Z(K), the reader should checkthis, and so M < G. Also o(Z(K)) and o(M/Z(K)) are coprime, ando(M/Z(K)) = n, hence using the inductive hypothesis again we seethat M has a subgroup of order n, and so this is also true for G.
Therefore we may assume that K is Abelian.

Schur-Zassenhaus Theorem 379
Stage 5 – The case when K is Abelian
For this main part of the derivation we shall give two proofs. In some waysthey are fairly similar, but they introduce distinct new ideas – the cocycleidentity and the crossed homomorphism – and so it seems worthwhile to giveboth. In some ways the second is more ‘in line’ with the rest of the work inthe book and this web section.
First proof in the Abelian case
The group K is a p-group but this fact will play no role in what follows. Toaid clarity we have reintroduced the dot notation “ · ” when referring to thegroup operation in the Abelian subgroup K.
Stage 5.1 – Cocycle identity.
In this stage we define a new action and derive one of its propertiescalled the cocycle identity, for a similar identity see Lemma 9.12. LetC = G/K and let c ∈ C, so c is a coset of K in G. (Note that herewe are not following our usual convention where we use upper caseletters for sets.) If g, g′ ∈ c, then by Lemma 2.22, g−1g′ ∈ K, and sogkg−1 = g′k(g′)−1 for all k ∈ K as K is Abelian in this Stage. Hencewe can define an action of C on K by
k\c = gkg−1 for k ∈ K, c ∈ C = G/K, and g ∈ c. (9.16)
This action has two further properties which the reader should check:
(kk′)\c = k\c · k′\c and (k−1)\c = (k\c)−1. (9.17)
Choose a transversal T = {tc : c ∈ C} for C, see Web Section 4.6.So o(T ) = n and tc is a representative in G of the coset c in C. Usingbasic coset and transversal properties we have
t−1c1c2K = (tc1c2
K)−1 = (c1c2)−1 = c−12 c−11 = (tc1tc2
)−1K,
where c1 and c2 are cosets of C = G/K. By Lemma 2.22 this gives
tc1tc2t−1c1c2∈ K.
Hence we can define a function θ : C × C → K by
tc1tc2
= (c1, c2)θ tc1c2. (9.18)
Now using (9.16) and (9.18) we obtain
tc1(tc2tc3) = tc1(c2, c3)θ tc2c3 = tc1(c2, c3)θ t−1c1tc1tc2c3
=((c2, c3)θ\c1
)· (c1, c2c3)θ · tc1c2c3
,
and
(tc1tc2)tc3 = (c1, c2)θ tc1c2tc3 = (c1, c2)θ · (c1c2, c3)θ · tc1c2c3 .

380 Chapter 9 Jordan-Holder Theorem and the Extension Problem
Combining these equations and using associativity we obtain the so-called cocycle identity
(c2, c3)θ\c1 · (c1, c2c3)θ = (c1, c2)θ · (c1c2, c3)θ, (9.19)
which holds for all c1, c2, c3 ∈ C.
Stage 5.2 – An extension of the cocycle identity, see (9.21) below.
First we define a map ψ : C → K by
dψ =∏
c∈C(d, c)θ,
for d ∈ C. Working in the Abelian group K we have, where n = o(C),
((c1, c2)θ)n · c1c2ψ =∏
c3∈C
((c1, c2)θ · (c1c2, c3)θ
)=∏
c3∈C
(((c2, c3)θ)\c1 · (c1, c2c3)θ
)using the cocycle identity (9.19)
=(∏
c∈C(c2, c)θ
)\c1 ·
∏c∈C
(c1, c)θ
=(c2ψ
)\c1 · c1ψ (9.20)
using (9.17) and Theorem 2.8 in the penultimate line, and the definitionof ψ in the last line.
As K is Abelian and (n, o(K)) = 1, the n-th power map: k → kn
for k ∈ K is an automorphism of K (Use the fact that if 0 ≤ r < n,then there exists, by the Euclidean Algorithm and GCD condition, aninteger s with the property sn ≡ r (mod o(K)).). Hence as the inverseof an automorphism is also an automorphism, the n-th root map onK: k → k1/n is again an automorphism of K as also is the map on Ksending k to k−1/n. Therefore, if we define ξ : C → K by
cξ = (cψ)−1/n for c ∈ C,
we have, by (9.20) and as K is Abelian,
(c1c2)ξ = c1ξ · (c2ξ)\c1 · (c1, c2)θ (9.21)
our extension of the cocycle identity.
Stage 5.3 – Completion of the argument.
First, using (9.21) we define an injective homomorphism from C toG, its image will be the required subgroup of G. By (9.21) we have
(c1c2)ξ tc1c2= c1ξ · (c2ξ)\c1 · (c1, c2)θ tc1c2
= c1ξ · tc1c2ξ t
−1c1· tc1
tc2
by (9.16) and (9.18)
= c1ξ tc1· c2ξ tc2
.

Schur-Zassenhaus Theorem 381
Therefore if we define ν : C → G by
cν = cξ tc for c ∈ C and tc ∈ T,
the calculation above shows that ν is a homomorphism from C to G.This homomorphism is injective by definition of the transversal, for ifc ∈ C and c 6= e, then tc 6∈ K, and so cξ tc 6= e which shows thatker ν = 〈e〉. Finally as o(C) = o(G/K) = n, we see that im ν is asubgroup of G of order n as required. 2
Second proof in the Abelian case
We begin by introducing crossed homomorphisms.
Definition 9.20 (i) Let K / G. A mapping θ : G→ K is called a crossedhomomorphism G to K if
(ab)θ = b−1(aθ)b(bθ) for all a, b ∈ G. (9.22)
(ii) The kernel of θ, ker θ, equals {a ∈ G : aθ = e}.By definition, aθ ∈ K for all a ∈ G, so in examples this fact needs to bechecked. Clearly if G is Abelian then a crossed homomorphism is just ahomomorphism. A more informative example is as follows. Choose a fixedb ∈ K and define θb by
aθb = [a, b] for all a ∈ G.
Clearly aθb ∈ K as K is normal in G, and it is easily checked that [aa′, b] =a′−1[a, b]a′[a′, b], and so θb is an example of a crossed homomorphism; itskernel equals CG(b), a subgroup of G. In the next lemma we show that thekernel of a general crossed homomorphism is always a subgroup of G, it isusually not normal.
Lemma 9.21 Suppose K / G and θ is a crossed homomorphism G to K.
(i) eθ = e.
(ii) ker θ ≤ G.
(iii) For a, b ∈ G, we have aθ = bθ if, and only if, Ka = Kb.
(iv) o(Gθ) = [G : K] where as usual Gθ = {gθ : g ∈ G}.
Proof. We shall derive (ii) and leave the remaining parts as an exercisefor the reader, see Problem 9.16. By (i) ker θ is not empty. Secondly ifj ∈ ker θ, then by (i)
e = eθ = (jj−1)θ = j(jθ)j−1(j−1θ) = j−1θ,
and so we also have j−1 ∈ ker θ. (Note, by definition jθ ∈ K and K/ G.)Similarly by (9.22) we have (ab)θ ∈ ker θ provided aθ, bθ ∈ ker θ, and(ii) follows by Theorem 2.13. 2

382 Chapter 9 Jordan-Holder Theorem and the Extension Problem
We shall now construct a new crossed homomorphism using transversals;see Definition 4.24 on Web page 331. Note that we also used transversalsin the first proof of the Schur-Zassenhaus Theorem. Suppose K is a normalAbelian subgroup of the finite group G. Let T denote the collection of alltransversals of K in G, as K is Abelian left and right transversals are iden-tical. For a, b ∈ G we write a ≈ b if, and only if, a and b belong to the samecoset of K in G. So as K is both normal and Abelian
a ≈ b if and only if Ka = Kb if and only if aK = bK.
If T1, T2 ∈ T , then the relation ≈ defined above is a bijection between T1 andT2. We define a mapping χ : G→ K by
(T1, T2)χ =∏∗
a−1b
where the product∏∗
is taken over all pairs of elements {a, b} in G such thata ∈ T1, b ∈ T2 and a ≈ b. As K is Abelian, the mapping χ is well-definedbecause in this case the order of the terms in the product is immaterial.
Example. Let G = D4 = 〈g, h | g4 = h2 = (gh)2 = e〉 and H = 〈g2〉 / G.The cosets are {e, g2}, {g, g3}, {h, g2h}, {gh, g3h}, and two of the possible 16transversals are
T1 = {e, g, h, gh} and T2 = {g2, g3, g2h, gh}.
Here we have e ≈ g2, g ≈ g3, h ≈ g2h and gh ≈ gh, and so
(T1, T2)χ = g2 · g2 · hg2h · e = g2.
We also have T2h = {g2h, g3h, g2, g}, and (T2, T2h)χ = e · g2 · e · g2 = e = h4;see the lemma below.
Lemma 9.22 Suppose G is finite, K is a normal Abelian subgroup of G,and T, Ti, i = 1, 2, 3, are transversals of K in G.
(i) (T1, T2)χ(T2, T3)χ = (T1, T3)χ.
(ii) If a ∈ G, then (T1a, T2a)χ = a−1(T1, T2)χa.
(iii) For a ∈ K we have (T, Ta)χ = a[G:K].
Proof. Straightforward using Lemma 9.21. For example in (i) note that(a−1b)(b−1c) = a−1c. And for (iii) if k ∈ K then aK = akK, and soa ≈ ak. The reader should fill in the details. 2
We can now give the second proof of the Abelian case of the Schur-Zassenhaus Theorem.
Second proof of the Abelian case. Let T be some transversal of K inG. Define a map θ : G→ K by
aθ = (T, Ta)χ for a ∈ G. (9.23)

Schur-Zassenhaus Theorem 383
By Lemma 9.22(iii), θ is a map from G into K. It is also a crossedhomomorphism, for by Lemma 9.22 again
(ab)θ = (T, Tab)χ = (T, Tb)χ(Tb, Tab)χ
= (T, Tb)χb−1(T, Ta)b = b−1(aθ)b(bθ),
as K is Abelian. Further by Lemma 9.22(iii), if c ∈ K, then
cθ = (T, Tc)χ = c[G:K].
But by hypothesis, [G : K] and o(K) are coprime, and so there existsan integer r satisfying r[G : K] ≡ 1 (mod o(K)). This implies that themap defined by
c→ cr
is the inverse of θ. Hence θ is surjective, and so Gθ = K. Now let J =ker θ, by Lemma 9.21(ii) J ≤ G. We also have o(K) = o(Gθ) = [G : K]by Lemma 9.21(iv). This gives
o(J)o(K) = o(G) and o(J) = [G : K].
Therefore J is the required complement subgroup and the theorem isproved. 2
The reader should note the similarities and differences between these twoproofs of the Abelian case.
As we commented above this result can be extended as follows.
Theorem 9.23 If K is a Hall normal subgroup of G and if at least one ofK and G/K is soluble, then all conjugates of K in G, that is all subgroupsproved to exist by Theorem 9.19, are conjugate in G.
Notes. (a) Note the comparison with the Sylow theory, Theorem 6.9.
(b) The solubility condition can be removed using the Feit-Thompson OddOrder Theorem. This result states that all groups of odd order are soluble,and we cannot have both o(K) and o(G/K) divisible by 2 when K is a Hallsubgroup.
(c) A proof in the Abelian case of Theorem 9.23 is given in Problem 9.19, anda proof in the general case can be found in Issacs [2008], page 82, or Scott[1964], Chapter 9.
Gaschutz proved the following related result.
Theorem 9.24 If K is a Abelian normal subgroup of a finite group G, thethe following statements are equivalent.
(a) K has a complement in G,
(b) If P is a Sylow subgroup of G, then K ∩P has a complement in P .
A proof is given in Problem 9.26. This result may be false if K is not Abelian,see page 225 in the third reference below.

384 Chapter 9 Jordan-Holder Theorem and the Extension Problem
More details concerning these results can be found in Scott [1964] Chap-ter 9, Rose [1978] Chapter 10, Rotman [1994] Chapter 7, and Issacs [2008]Chapter 3.
9.5 Problems 9W
Problem 9.16 Give proofs of the remaining parts of Lemma 9.21 and ofthe three parts of Lemma 9.22.
Problem 9.17 (i) Let F be a finite field whose characteristic is not equalto 2, and let G be the group of 3× 3 matrices of the form(
A Ov 1
)= M
where A ∈ GL2(F ), v is a element of the 2-dimensional vector space over F ,and O is the 2-dimensional zero column vector. Further let J be the subgroupof G consisting of those matrices whose submatrix A in the definition abovehas the form
(1 0c 1
), and let H be the subgroup of J of those matrices with
c = 0.
(i) Show that H / G.
(ii) Prove that G is isomorphic to a semi-direct product of H by GL2(F ).
(iii) Further prove that J possesses a complement of H which is notcontained in any complement of H in G. This result is false if o(F ) = 2.(Hint. Show that if L ≤ J, J = HL, H ∩ L = 〈e〉 and L is contained in acomplement of H in G, then CG(L) contains an element of order 2.)
Problem 9.18 Suppose p > q. Show that every group of order p2q has anormal Sylow p-subgroup, and classify all such groups.
Problem 9.19 Prove Theorem 9.23 in the Abelian case using the followingmethod based on the second proof of the Abelian case of the Schur-ZassenhausTheorem (Theorem 9.19).
Method. Let H be a complement of K in G, then H is a transversal for K,and let c = (H,T )χ ∈ K. By Theorem 9.22(iii) and as θ is surjective, findd ∈ K to satisfy: dθ = c. Now show that d−1Hd is the required complement.To do this we will need to show that (d−1hd)θ = h−1ch · hθ · c which gives(d−1hd)θ = e.
Problem 9.20 Suppose K / G, (o(K), [G;K]) = 1, J ≤ G, o(J) | [G : K]and either J or K is soluble. Prove that J is contained in a complement ofK in G.
Problem 9.21 Let P be a Sylow p-subgroup of G which is contained inZ(G), and let the set of elements of G whose orders are not divisible by p bedenoted by C. Show that C is a subgroup of G, and G ' C × P .
Schur-Zassenhaus Theorem 385
Problem 9.22 SupposeK/G, [G : K] = m,K is Abelian, and all elementsof K can be uniquely expressed as m-powers. Prove that K has a complementin G.
Problem 9.23 Suppose K1 and K2 are normal subgroups of G. Show thatif, for i = 1, 2, Ki has a complement Hi in G, and K2 ≤ H1, then K1K2 alsohas a complement in G.
Problem 9.24 Give an example of a group G with a normal subgroup Kwith the following properties. (a) G can be expressed as a semi-direct productover K and (b) the conjugates of K do not form a single conjugacy class.
Problem 9.25 Suppose G is a soluble group, K / G, and H is a Hallsubgroup of K. Show that G ' KNG(H).
Problem 9.26 (i) Suppose K/ G and H is a Sylow p-subgroup of G. Showthat H ∩K is a Sylow p-subgroup of K.
(ii) Give a proof of Gaschutz’s result Theorem 9.24 using the followingmethod.
(a) implies (b). By (i) P ∩K is a Sylow p-subgroup of K, also as K is Abelian,there exists L ≤ K with the property: K = (K∩P )L, and by (a) there existsJ ≤ G with the properties: G = JK and J ∩K = 〈e〉. Now use Problem 2.18to show that JL is the required complement in P .
(b) implies (a). As usual let Gp denote the subgroup of the p-elements of G.If p | o(G), then Kp/ G and Kp ≤ Pp. By (b) Kp has a complement in Pp, andby the Schur-Zassenhaus Theorem (Theorem 9.19) Kp has a complement Mp
in G. Let M =⋂pMp. Now use Problem 2.15 and Theorem 5.8 to complete
the proof.
Problem 9.27 Let G be a soluble group, and let H be a proper subgroupof G with smallest possible index. Prove that H/G, a result due to Berkovich.

12.6 Further Topics on Simple groups 387
12.6 Further Topics on Simple Groups
This Web Section has three parts (a), (b) and (c). Part (a) gives a briefdescriptions of the 56 (isomorphism classes of) simple groups of order lessthan 106, part (b) provides a second proof of the simplicity of the lineargroups Ln(q), and part (c) discusses an ingenious method for constructinga version of the Steiner system S(5, 6, 12) from which several versions ofS(4, 5, 11), the system for M11, can be computed.
12.6(a) Simple Groups of Order less than 106
The table below and the notes on the following five pages lists the basic factsconcerning the non-Abelian simple groups of order less than 106. Furtherdetails are given in the Atlas (1985), note that some of the most interestingand important groups, for example the Mathieu group M24, have orders inexcess of 108 and in many cases considerably more.
Simple Order Prime Schur Outer Min Simple Order Prime Schur Outer Mingroup factor multi. auto. simple or group factor multi. auto. simple or
count group group N-group count group group N-group
A?5 60 4 C2 C2 m-s L2(73) 194472 7 C2 C2 m-s
A?6 360 6 C6 C2
2 N-g L2(79) 246480 8 C2 C2 N-gA7 2520 7 C6 C2 N-g L2(64) 262080 11 〈e〉 C6 N-gA?
8 20160 10 C2 C2 - L2(81) 265680 10 C2 C2 × C4 N-gA9 181440 12 C2 C2 - L2(83) 285852 6 C2 C2 m-sL2(4)? 60 4 C2 C2 m-s L2(89) 352440 8 C2 C2 N-gL2(5)? 60 4 C2 C2 m-s L2(97) 456288 9 C2 C2 m-sL2(7)? 168 5 C2 C2 m-s L2(101) 515100 7 C2 C2 N-gL2(9)? 360 6 C6 C2
2 N-g L2(103) 546312 7 C2 C2 m-sL2(8) 504 6 C2 C3 m-s L2(107) 612468 7 C2 C2 m-sL2(11) 660 5 C2 C2 N-g L2(109) 647460 8 C2 C2 N-gL2(13) 1092 5 C2 C2 m-s L2(113) 721392 8 C2 C2 m-sL2(17) 2448 7 C2 C2 m-s L2(121) 885720 8 C2 C2 × C2 N-gL2(19) 3420 6 C2 C2 N-g L2(125) 976500 9 C2 C6 N-gL2(16) 4080 7 〈e〉 C4 N-g L3(2)? 168 5 C2 C2 m-sL2(23) 6072 6 C2 C2 m-s L3(3) 5616 8 〈e〉 C2 m-sL2(25) 7800 7 C2 C2
2 N-g L3(4) 20160 10 C3×C24 D6 -
L2(27) 9828 7 C2 C6 m-s L3(5) 372000 10 〈e〉 C2 -L2(29) 12180 6 C2 C2 N-g L4(2)? 20160 10 C2 C2 -L2(31) 14480 8 C2 C2 N-g U3(3) 6048 9 〈e〉 C2 N-gL2(37) 25308 6 C2 C2 m-s U3(4) 62400 10 〈e〉 C4 -L2(32) 32736 8 〈e〉 C5 m-s U3(5) 126000 10 C3 D3 -L2(41) 34440 7 C2 C2 N-g U4(2)? 25920 11 C2 C2 -L2(43) 39732 6 C2 C2 m-s S4(3)? 25920 11 C2 C2 -L2(47) 51888 7 C2 C2 m-s S4(4) 979200 13 〈e〉 C4 -L2(49) 58800 9 C2 C2
2 N-g Sz(8) 29120 9 C2 × C2 C3 m-sL2(53) 74412 7 C2 C2 m-s M11 7920 8 〈e〉 〈e〉 N-gL2(59) 102660 6 C2 C2 N-g M12 95040 11 C2 C2 -L2(61) 113460 6 C2 C2 N-g M22 443520 12 C12 C2 -L2(67) 150348 6 C2 C2 m-s J1 175560 8 〈e〉 〈e〉 -L2(71) 178920 8 C2 C2 N-g J2 604800 13 C2 C2 -
Table 1 – Non-Abelian Simple Groups with Order less than 106

388 Chapter 12 Simple Groups of Order less than 106
Notes. (a) The outer automorphism and Schur multiplier groups (Columns4 and 5 above) are considered at the end of this subsection. Thompson (1968)defined an N-group, N-g, to be a group in which the normalisers of all of itsnon-neutral soluble subgroups are themselves soluble, and a group is calledminimum simple, m-s, if all of its proper subgroups are soluble. As a devel-opment of his, and Feit’s, work on the odd order problem published in 1963,he was able to determine those simple groups that have the properties m-sand/or N-g. His Main Theorem is as follows:
Each non-soluble N -group is isomorphic to a group G which satisfies:InnH ≤ G ≤ AutH where H is one of the following N -groups
L2(q) (q > 3), Sz(22n+1) (n ≥ 1), A7, L3(3), U3(3) and M11,
see Sections 12.3 and 12.4, and (c) below (for the Suzuki groups Sz). As acorollary to this theorem, Thompson was also able to list the minimal simplegroups: If p denotes an odd prime they are
L2(2p), L2(3p), L2(p), Sz(2p), and L3(3),
where in the third case p > 3 and p ≡ 3 or 7 (mod 10). Column 6 of thetable on the previous page lists this data for the groups under discussion. Asan exercise the reader should consider why the second list above is smallerthan the first, see Problem 12.16W. Note that both A5 and A6 occur in thesecond list, see (b) below.
(b) The stars (?) in Table 1 overleaf indicate that the isomorphism classof the group listed contains more than one group in the table; we have
A5 ' L2(4) ' L2(5)
A6 ' L2(9)
A8 ' L4(2)
L2(7) ' L3(2)
U4(2) ' S4(3),
see Problems 6.16, 12.4, 12.6, 12.7 and 12.17, and the Atlas. The group A8
is not isomorphic to L3(4) even though these groups have the same order. Forinstance the group A8 contains elements of order 15 whilst L3(4) contains noelement of order larger than 7, a number of other distinctions have been found;see Problem 12.13. Infinitely many pairs of non-isomorphic simple groupswith the same order exist, but there are no triples. This is a consequence ofthe classification given by CFGS.
(c) The Suzuki groups Sz(22n+1), n = 1, 2, . . . were discovered by MuchioSuzuki in 1959. Later it was realised that they can also be treated as the(twisted) Chevalley groups 2B2(22n+1). One definition is as a set of 4 × 4matrices over F22n+1 which ‘preserve’ a collection of vectors whose coordinatessatisfy a special quadratic condition; we shall consider these groups in WebSection 14.3. They are the only non-Abelian simple groups whose orders arenot divisible by 3, another result due to Thompson.

12.6 Further Topics on Simple groups 389
(d) Below we give brief descriptions of the groups in the table notso far mentioned in the text, or discussed in Web Chapter 14; they areS4(4),M22, J1 and J2. The unitary groups U3(4) to U4(2) have similar defi-nitions to that given for U3(3) on pages 265 to 267. The following data givesa partial list of their maximal subgroups, full details can be found in theAtlas. U3(4) : A5×C5, S3 oC2
5 and F13,3; U3(5) : A7, C2S5 and M10 whichis isomorphic to the group D defined on page 268; and U4(2) : A5 o C4
2 , S6
and S4 o C33 .
One definition of the Mathieu group M12 was given on page 268 and itsconnection with the Steiner system S(5, 6, 12) will be considered on page 395.With M24 it is the only group that is 5-transitive if we exclude the symmetricand alternating cases. Several definitions are given in the Atlas includingthe following presentation
M12 ' 〈a, b, c | a11 = b2 = c2 = (ab)3 = (ac)3 = (bc)10 = a2(bc)2a(bc)8 = e〉.
The maximal subgroups are isomorphic copies of M11, an extension of T2 byA6, C2S4 o C2
3 , C2 × S5, an extension of an Extra Special group of order 32by S3, D6 o C2
4 , and A4 × S3.
S4(4) – The symplectic group of order 4 defined over F4 The def-inition of the group Sn(q) is similar to that for the unitary group Un(q). Asbefore we work over the field Fq2 , the dimension n must now be even. Thehermitian form fixed by matrices in Un(q) is replaced by an ‘alternating form’of the type
x1ym+1 + x2ym+2 + · · ·+ xmy2m − xm+1y1 − xm+2y2 − · · · − x2mym
and matrices in S2m(q) where n = 2m fix a form of this type. If we have(A BC D
)∈ S2m(q) where A,B,C and D are m×m, then
A>C = C>A, B>D = D>B, A>D − C>B = I2m,
where > denotes the transpose. All matrices have determinant 1, and S2m(q)is obtained by factoring out the scalar matrices as in the linear and unitarycases, the centre has order (q−1, 2) in this case. We have S2(q) ' L2(q) for allprime powers q, S4(2) ' S6, and as noted on page 388 we have S4(3) ' U4(2).Also
o(S2m(q)) = qm2
(q2m − 1)(q2m−2 − 1) . . . (q2 − 1)/(q − 1, 2).
The group S4(4)× C2 has a presentation as follows:
〈a1, . . . , a5 | a21 = a22 = a23 = a24 = a25 = (a1a2)5 = (a1a3)2 = (a1a4)2 = (a1a5)2
=(a2a3)5 =(a2a4)2 =(a2a5)2 =(a3a4)3 =(a3a5)2 =(a4a5)3 =(a1a2a3)4 = e〉
The order of S4(4) is 28 ·32 ·52 ·17, and its maximal subgroups are isomorphiccopies of (A5×C3)oC6
2 , C2oL2(16) and S6. See the Atlas for further details.

390 Chapter 12 Simple Groups of Order less than 106
M22 – The third Mathieu group J. A. Todd gave the following defini-tion. Let
α1 = (4, 15)(6, 18)(7, 8)(9, 13)(10, 16)(11, 21)(12, 19)(20, 22),
α2 = (4, 10)(6, 11)(7, 12)(8, 19)(9, 22)(13, 20)(15, 16)(18, 21),
α3 = (4, 20)(6, 8)(7, 18)(9, 16)(10, 13)(11, 19)(12, 21)(15, 22),
α4 = (4, 8)(6, 20)(7, 15)(9, 21)(10, 19)(11, 13)(12, 16)(18, 22),
β = (3, 4)(5, 22)(6, 18)(7, 12)(8, 21)(11, 19)(13, 14)(16, 17),
γ = (2, 3)(6, 18)(9, 21)(10, 12)(11, 13)(14, 17)(16, 19)(20, 22),
δ = (1, 2)(6, 15)(7, 10)(8, 11)(9, 19)(14, 17)(16, 22)(20, 21).
The permutations α1, . . . , α4 generate an isomorphic copy of C42 (an ele-
mentary Abelian 2-group of maximal order in the group). If we add β toα1, . . . , α4 we obtain a group H1 of order 960 isomorphic to a semi-directproduct A5 o C4
2 , then if we add γ to H1 we obtain a group H2, of order20160, isomorphic to L4(3), and finally if we add δ to H2 we obtain the groupM22, with order 443520 = 48 · 20 · 21 · 22, and defined as a subgroup of A22.8
Secondly, let θ = α2α3, σ = βα1α2β and τ = γβα1α3βδγ, and let
H3 = 〈α1, . . . , α4, δ, σ, τ〉.
Then o(H3) = 384, H3 ' S4oC42 ' CM22(θ). Janko has shown that M22 can
be defined as the unique group containing a so-called 2-central involution asuch that CM22
(a) ' H3. A number of presentations have been given, thefollowing can be found in the Atlas (1985)
M22 ' 〈a1 . . . , a5 | a21 = a22 = a23 = a24 = a25 = (aiaj)2[∗]
= (a1a2)3 = (a2a3)5 = (a3a4)3 = (a1a5)4 = (a3a5)3
= (a1a2a5)3 = (a1a2a3)5 [= (a2a3a5)5]
= (a1a5a3a4)4 = (a1a2a3a5)8 = e〉.
The first square brackets [∗] indicates that i and j range from 1 to 5 when thisrelation does not contradict one given in the following line (for instance i = 1and j = 2), and the second square brackets imply that this condition is notstrictly necessary. The group M22 is also closely related to the Steiner systemS(3, 6, 22), that is the automorphism group of this system is isomorphic to anextension of M22 by C2 – note not M22 itself. Maximal subgroups of M22 areisomorphic copies of L4(3) (the group H2 mentioned above), A6 o C4
2 , A7,S5oC4
2 (one of these subgroups and H1, defined above, give a generating setfor the whole group), L3(2) o C3
2 , and L2(11).
J1 – The first Janko Group Z. Janko (1965) defined J1 as the uniquegroup with the properties: (i) its Sylow 2-subgroups are (elementary) Abelian,
8 If we define µ = (1, 23)(5, 17)(6, 8)(7, 12)(9, 15)(11, 19)(16, 22)(18, 21) and ν =(23, 24)(6, 10)(7, 15)(9, 21)(12, 18)(14, 17)(16, 22)(19, 20), then we have 〈α1, . . . , δ, µ〉 'M23 and 〈α1, . . . , δ, µ, ν〉 ' M24; so M23 is isomorphic to a subgroup of A23 and M24
is isomorphic to a subgroup of A24. Also o(M23) = o(M22) · 23 and o(M24) = o(M23) · 24.

12.6 Further Topics on Simple groups 391
(ii) it has no subgroup of index 2, and (iii) it contains an involution a suchthat CJ1(a) ' A5×C2; see page 103. It can also be generated by two matricesdefined over GL7(11), and as a subgroup of A266. One of its presentations is
〈a1, . . . , a5 | a21 = a22 = a23 = a24 = a25 = (a1a2)3 = (a2a3)5 = (a3a4)3
= (a4a5)5 = (aiaj)2[∗] = (a1a2a3)5 = e, a1 = (a3a4a5)5〉,
(for [∗] see the presentation for M22). It has order 23 ·3·5·7·11·19 and, in 1965,it was the first sporadic group discovered in nearly 100 years, that is afterMathieu discovered his groups in the 1860s and 1870s. See Janko’s remarkable1965 paper and the Atlas for further details. The maximal subgroups of J1are isomorphic copies of L2(11), A5 × C2, F19,6, F11,10 and F7,6.
J2 – The second Janko Group, sometimes also known as the Hall-Janko Group or the Hall-Janko-Wales Group This group can bedefined as a subgroup of A100 generated by three elements, of orders 7, 8 and2, respectively; see Hall and Wales (1968). Janko defined it as the uniquegroup satisfying the following conditions: (i) it is simple, (ii) it has order604800, (iii) it has exactly two conjugacy classes of involutions, and (iv) itcontains an involution a such that CJ2(a) is isomorphic to an extension of Nby A5 where N is a so-called central extension (of total order 32) of Q2 andD4. One presentation of J2 is
〈a, b | a2 = b3 = y15 = (y(y3z2)2z)2 = (y3z(y2z2)2)2 = e〉,
where y = ab and z = ab2. See the paper quoted above for further details.The maximal subgroups of J2 are isomorphic copies of the following groups
U3(3) (page 265), an extension of PGL2(9) by C3, A5 oN,
A5 ×A4, A5 ×D5, C2 o L3(2) and A5.
(PGLn(p) is defined in a similar manner to Ln(p), that is as GLn(p) factoredby its centre, see page 170.)
Outer Automorphism and Schur Multiplier Groups
The outer automorphism and Schur multiplier groups are important in thecharacter theory of simple groups, and they have connections with certainwell-behaved extensions which we consider now. The outer automorphismgroup out(G) = H of a group G was defined on page 82. If the order of His larger than one, then the theory discussed in Section 9.2 guarantees theexistence of an extension group J of G by H. Also there is a close relationshipbetween the character tables of G and J , once the character table for G hasbeen constructed, there is a fairly automatic procedure for the constructionof the table for J when H is relatively small. For example if G = A5, thenout(G) ' C2 and there exists an extension of A5 by C2 which, of course, isisomorphic to S5. Secondly, if G = U3(3), where again out(G) ' C2, we gavea presentation of the semi-direct product of U3(3) by C2 on page 266.

392 Chapter 12 Simple Groups of Order less than 106
The Schur multiplier deals with the reverse situation, that is when thegroup G is isomorphic to a factor group of the extension. And again there isa close connection between the character tables of the groups involved. Themultiplier can be defined as follows. An extension J of H by G is called centralif H ≤ Z(J) and G ' J/H.9 One example is given by taking H to be anarbitrary Abelian group and J = G×H. To avoid this rather straightforwardcase we also require H to belong to the derived subgroup of J . Hence givenG we are looking for H and J satisfying
H ≤ Z(J) ∩ J ′ and G ' J/H,
see Theorem 10.18; note this implies that H is Abelian. It can be shown thatthere always exists a unique maximal solution H. This subgroup H is calledthe Schur multiplier of G and it is usually denoted by M(G), some examplesare given in the table on page 387. It can also be shown that if G is simple(in fact we only need G to be perfect) and H = M(G), then J is unique (upto isomorphism). It is called the cover or the Schur representation group ofthe group G.
Two further definitions have been given. First M(G) can be defined asthe cohomology group H2(G,C∗), see the references quoted below. Secondly,if G is given by the presentation
G = 〈a1, . . . , ak |x1 = · · · = xl = e〉, (12.12)
where each xj is a word using the letters a1, . . . , ak, then the extension J canbe given a presentation in the following form. Using a1, . . . , ak, c1, . . . , cl andx1, . . . , xl given in (12.12), the relations of J are
xj = cj and aicj = cjai for all 1 ≤ i ≤ k and i ≤ j ≤ l,
and the Schur multiplier M(G) equals 〈c1, . . . , cl〉 ∩ J ′. As with the outerautomorphism group case there is a close connection between the charactertables of G and J .
These two constructions can sometimes be combined to form ‘doubleextensions’ H by G by J , but in this case we lose uniqueness. For an exampleconsider the group SL2(5). Its centre is isomorphic to C2 which also equalsits derived subgroup, and as we have seen previously
A5 ' SL2(5)/C2,
that is M(A5) ' C2. (To be more precise this only shows that M(A5) ≥ C2,further arguments are needed to establish the isomorphism.) Also two distinctgroups arise which are extensions of the type C2 by A5 by C2. A similar resultholds for An if n > 7, but the situation is more complicated for A6 and A7:see Sections 4 and 6 of the Atlas (1985), and Chapter 2, Section 7, in Suzuki(1982).
9 Refer to Definition 9.11. In a central extension the maps ϑa in the factor set satisfyϑa = e for all a ∈ A. Hence the cocycle identity has a simplified form.

12.6 Further Topics on Simple groups 393
12.6(b) A New Proof of the Simplicity of Ln(q)
In this section we give a second proof of the simplicity of the groups Ln(q)(when q > 3 if n = 2) using Iwasawa’s Lemma which was proved in WebSection 5.4, page 357. This proof has the advantage that it deals with allcases in one ‘go’ and shows clearly where the conditions are needed but, com-pared with the first proof, it requires more preliminary material. Iwasawa’sLemma only applies to permutation groups which are both perfect and prim-itive but this is sufficient for a good proportion of the classical groups. Webegin the proof by showing that the groups SLn(q) have these properties(with two exceptions).
In Section 12.2 we defined a transvection Eij(r) as the identity matrix Inwith the additional entry r in the (i, j)th place where r 6= 0 and i 6= j. Weshowed there that
Eij(r)−1 = Eij(−r). (12.13)
Lemma 12.15 The group SLn(q) is generated by its transvections.
Proof. See Lemmas 12.8 and 12.11. The proof is straightforward usingthe elementary operations, and the fact that an elementary operationcan be performed by pre- or post-multiplying the given matrix by atransvection. As the determinant of a transvection is 1, this can all becarried out in SLn(q). 2
Lemma 12.16 The group SLn(q) is perfect provided q > 3 when n = 2.
Note that neither SL2(2) (' D3) nor SL2(3) is perfect, see Section 8.2.
Proof. By Lemmas 12.8 and 12.11 it is sufficient to show that eachtransvection can be written as a commutator. Suppose first n > 2 and1 ≤ i, j, k ≤ n where i, j and k are distinct (and so we need n to be atleast 3). Using (12.13) it is easy to check that
[Eik(1), Ekj(r)] = Eij(r),
and this proves the result in this case.
For the case n = 2 we argue as in the last part of the proof of Theorem12.10. Let a, b ∈ Fq\{0}, and let
A =
(a−1 00 a
)and B =
(1 b0 1
).
Then we have[A,B] = E12(b(1− a2)).
Now as q = o(Fq) > 3 we can choose a to satisfy 1 − a2 6= 0. Hencefor an arbitrary c ∈ Fq we can choose a and b to satisfy c = b(1 − a2)which gives the result in this case. For the remaining case note thatE21(c) = [(B−1)>, (A−1)>]. 2

394 Chapter 12 Simple Groups of Order less than 106
Next we introduce some further linear algebra properties. If V is ann-dimensional vector space defined over the field Fq, then the elements ofGLn(q), or SLn(q), transform V to itself, and so we can say that GLn(q) orSLn(q) act on V – the ‘natural action’; note that this action obeys the basicaction axioms (5.1) given in Section 5.1. (They do, of course, also depend onthe basis chosen for V .)
Lemma 12.17 Suppose V is an n-dimensional vector space defined overFq, and n ≥ 2. The natural action of SLn(q) on the set of 1-dimensionalsubspaces of V defined above is doubly transitive.
Proof. A matrix in SLn(q) maps the set of 1-dimensional sub-spaces to itself. As n ≥ 2 we can ask if this action is doubly tran-sitive. Let u1, u2, w1, w2 ∈ V where u1 6= u2 and w1 6= w2, and letthe 1-dimensional subspaces containing these vectors be denoted byU1, U2, V1, V2, respectively. (So for instance U1 = {cu1 : c ∈ Fq}.) Asu1 6= u2 and w1 6= w2 we can find u3, . . . , wn so that both {u1, . . . , un}and {w1, . . . , wn} are bases for V , and there exists a matrix A in GLn(q)which transforms the first of these bases to the second. Is A in SLn(q)?If not, suppose its determinant detA equals a. Now w1/a, w2, . . . , wn isalso a basis for V , and if we repeat the above procedure with this newbasis, then the corresponding matrix A will have determinant 1, and soit will belong to SLn(q). This shows that the group SLn(q) is doublytransitive. 2
We come now to Ln(q), that is SLn(q) factored by its centre Z, the setof scalar matrices. As Z acts neutrally on the set of 1-dimensional subspacesof V , the natural action on SLn(q) is also an action of Ln(q).
Lemma 12.18 (i) If n ≥ 2, then Ln(q) is a doubly transitive permutationgroup.
(ii) The degree of the group, that is the order of the set upon which Ln(q)acts, equals (qn − 1)/(q − 1).
Proof. (i) This follows from the discussion above. (ii) We leave this asan exercise for the reader, note that (qn − 1)/(q − 1) is the number of1-dimensional subspaces in the underlying vector space. 2
We are now ready to prove our main result.
Theorem 12.19 The group Ln(q) is simple provided q > 3 when n = 2.
Proof. We shall use Iwasawa’a Lemma (Theorem 5.40) given in WebSection 5.4. The first condition is that Ln(q) should be a primitivepermutation group, this follows from Lemma 12.17 and Corollary 5.37in Web Section 5.4. The second condition is that the group should beperfect, and this follows from Lemma 12.16 using the CorrespondenceTheorem (Theorem 4.16). This is the only point where the exceptionsin the theorem apply.
Let vi be an element of a basis for the underlying n-dimensional vectorspace V (1 ≤ i ≤ n), see Lemma 12.17, and let Ui be the 1-dimensionalsubspace containing vi (so Ui = {cvi : c ∈ Fq}). Further let

12.6 Further Topics on Simple groups 395
Hi = stabSLn(q)(Ui).
Now Hi acts on the vector space V/Ui, and induces a group homomor-phism from Hi to the group of invertible linear maps on V/Ui. Let Ki
be the kernel of this map, so Ki is the group of all matrices that sta-bilise Ui in SLn(q), and act neutrally on V/Ui. Hence if A ∈ Ki, thendetA = 1. Further, the linear map induced on V/Ui by A is the identitymap, and it has determinant 1. Hence we can take the matrix of thismap in the form
A =
1. . .
1ci . . . ci−1 1 ci+1 . . . cn
1. . .
1
for cj ∈ Fq,
with zeros at all other entries. The collection of all matrices of type Aforms an Abelian subgroup of SLn(q) (reader, check), and this subgroupis normal as it is the kernel of a homomorphism.
Further, as SLn(q) acts on the set of 1-dimensional subspaces of Vand Ki is determined by the vector vi, we see that the collection ofgroups Ki are conjugate in SLn(q). But each transvection Ejk(r) be-longs to one of the Ki (1 ≤ i ≤ n), and so, by Lemma 12.15, the normalclosure of K1 is SLn(q). (Note that we could have taken any one of thegroups Ki in place of K1.)
Lastly we use the Correspondence Theorem (Theorem 4.16). Thefactor group H1/Z(H1) is a point stabiliser of the permutation groupLn(q), and K1/Z(K1) is an Abelian normal subgroup of H1/Z(H1).Also the normal closure of K1/Z(K1) is Ln(q). Hence we have satisfiedall of the conditions in Iwasawa’a Lemma, and so the result follows. 2
This method can also be applied to establish the simplicity of a numberof other classes of groups including the Unitary, Sympletic and OrthogonalGroups, and some other individual groups.
12.6(c) Constructing S(5, 6, 12) and S(4, 5, 11)
The following procedure constructs a version of the Steiner system S(5, 6, 12).Versions of S(4, 5, 11) can be read off directly; in fact it gives several versionsof two types, see below. For further details on this construction see Curtis(1984); the author called it “a pocket calculator for M12”. Chapter 11 inConway and Sloane (1993) is also of revelance here. We work on the projectiveline modulo 11, which we take as
P = {∞, 0, 1, . . . , 9, 10},

396 Chapter 12 Simple Groups of Order less than 106
and we consider 3× 3 arrays of elements in P of the form
a1 a2 a3b1 b2 b3c1 c2 c3
We need to define three types of subsets of these arrays. First, a line (ortriple) is one of the twelve 3-element subsets listed below. Think of an arrayas a “torus”, that is identify the top and bottom edges, and then the left andright edges. The first diagram below illustrates these lines. So for example{a1, b3, c2} is a line, one of the three ‘anti-diagonals’, see the second entry inthe second column of the diagram below. The lines are
{a1, a2, a3}, {b1, b2, b3}, {c1, c2, c3}, {a3, b2, c1}, {a1, b3, c2}, {a2, b1, c3},{a1, b2, c3}, {a3, b1, c2}, {a2, b3, c1}, {ai, bi, ci} for i = 1, 2, 3.
s s s
s s s
s s s
sss
sss
sss
s s ssss
s ss
ss s
s ss
ss s
The Twelve Lines in an Array
Secondly, a cross is a union of two perpendicular lines (horizontal and verticallines are perpendicular, as are diagonal and anti-diagonal lines), there are 18as follows.
{a1, a2, a3, b1, c1}∗ {a1, a2, a3, b3, c3} {a3, b3, c1, c2, c3}{a1, b1, c1, c2, c3} {a1, a2, a3, b2, c2} {a3, b1, b2, b3, c3}{a2, b2, c1, c2, c3} {a1, b1, b2, b3, c1} {a2, b1, b2, b3, c2}{a1, a3, b2, c1, c3}∗ {a1, a2, b1, b2, c3}∗ {a2, a3, b2, b3, c1}{a3, b1, b2, c1, c2} {a2, a3, b2, b3, c1} {a2, b1, b3, c1, c3}∗{a1, a2, b3, c1, c2} {a1, a3, b1, b3, c2} {a2, a3, b1, c2, c3}.
Four of these crosses, marked with an asterisk above, are illustrated in thesecond diagram below.
ee e ee
eee e e ee ee e ee
e ee

12.6 Further Topics on Simple groups 397
The third collection contains the squares which are the complements of thecrosses in the array on page 396, so again there are 18 and each have fourelements. For example the first is {b2, b3, c2, c3}.
The algorithm is constructed using the following three arrays. These ar-rays were produced using the fact that if we select from the system S(5, 6, 12)those hexads that contain a fixed triple then we obtain a version of the Steinersystem S(2, 3, 9). We take {0, 1,∞} as the fixed triple, see Rows 19 and 20 inTable 3 on page 398; but note that we could have taken an arbitrary triplefrom P as the fixed triple – reader, try one. Each line in these arrays belongsto this smaller system defined on the set {2, 3, . . . , 10}. The arrays are
6 10 3
2 7 4
5 9 8
2 6 5
10 9 7
8 4 3
10 2 8
6 4 9
3 7 5
∞-array 0-array 1-array
These three arrays can be combined into one triangular array called the‘kitten’. A similar device called MOG (Miracle Octad Generator) has beenconstructed for M24, hence the name! In fact the kitten can be embedded inMOG, see the paper quoted above and the Atlas (1985) for further details.Each of the three arrays above form part of this triangular array. For examplethe ∞-array can be obtained from the diagram below by simply ignoring thetwo lower outer triangles and rotating.
∞
0 1
8
7
6
2 10 2 10
6
5
2
3
10
69 4
Calculator for M12 – the ‘Kitten’
The elements of the Steiner system S(5, 6, 12) (‘hexads’ of six elementsin P) consist of the following sets:
(a) ∞ and a cross from the ∞-array; 0 and a cross from the 0-array;and 1 and a cross from the 1-array; there are 54 in total, see Columns1 to 3 in Table 3.

398 Chapter 12 Simple Groups of Order less than 106
(b) ∞, 0 and a square from the 1-array; ∞, 1 and a square from the0-array; and 0, 1 and a square from the ∞-array; there are again 54 intotal, see Columns 4 to 6 in Table 3.
(c) The union of {∞, 0, 1} and a line, and the union of two parallel lines;24 in total, the last four rows in Table 3. ‘Parallel’ is defined in a similarmanner to perpendicular, for instance: {a3, b1, c2} and {a2, b3, c1} areparallel, see the third column of the first diagram on page 396.
These hexads are listed in the table below, the bold entries will be explainedon page 399.
∞,2,3,4,6,9 0,2,3,4,7,9 1,2,3,4,5,7 ∞,0,2,3,4,5 ∞,1,2,3,4,10 0,1,2,3,4,6∞,2,3,4,7,8 0,2,3,4,8,10 1,2,3,4,8,9 ∞,0,2,3,6,8 ∞,1,2,3,5,8 0,1,2,3,5,10∞,2,3,5,6,10 0,2,3,5,6,7 1,2,3,5,6,9 ∞,0,2,3,7,10 ∞,1,2,3,6,7 0,1,2,3,7,8∞,2,3,5,7,9 0,2,3,5,8,9 1,2,3,6,8,10 ∞,0,2,4,6,10 ∞,1,2,4,5,9 0,1,2,4,5,8∞,2,3,8,9,10 0,2,3,6,9,10 1,2,3,7,9,10 ∞,0,2,4,8,9 ∞,1,2,4,6,8 0,1,2,4,9,10∞,2,4,5,6,7 0,2,4,5,6,9 1,2,4,5,6,10 ∞,0,2,5,7,8 ∞,1,2,5,7,10 0,1,2,5,7,9∞,2,4,5,8,10 0,2,4,5,7,10 1,2,4,6,7,9 ∞,0,2,5,9,10 ∞,1,2,6,9,10 0,1,2,6,7,10∞,2,4,7,9,10 0,2,4,6,7,8 1,2,4,7,8,10 ∞,0,2,6,7,9 ∞,1,2,7,8,9 0,1,2,6,8,9∞,2,5,6,8,9 0,2,5,6,8,10 1,2,5,6,7,8 ∞,0,3,4,6,7 ∞,1,3,4,5,6 0,1,3,4,5,9?
∞,2,6,7,8,10 0,2,7,8,9,10 1,2,5,8,9,10 ∞,0,3,4,9,10 ∞,1,3,4,7,9 0,1,3,4,7,10∞,3,4,5,7,10 0,3,4,5,6,10 1,3,4,5,8,10 ∞,0,3,5,6,9 ∞,1,3,5,9,10 0,1,3,5,6,8∞,3,4,5,8,9 0,3,4,5,7,8 1,3,4,6,7,8 ∞,0,3,5,8,10 ∞,1,3,6,8,9 0,1,3,6,7,9∞,3,4,6,8,10 0,3,4,6,8,9 1,3,4,6,9,10 ∞,0,3,7,8,9 ∞,1,3,7,8,10 0,1,3,8,9,10∞,3,5,6,7,8 0,3,5,7,9,10 1,3,5,6,7,10 ∞,0,4,5,6,8 ∞,1,4,5,7,8 0,1,4,5,6,7∞,3,6,7,9,10 0,3,6,7,8,10 1,3,5,7,8,9 ∞,0,4,5,7,9 ∞,1,4,6,7,10 0,1,4,6,8,10∞,4,5,6,9,10 0,4,5,8,9,10 1,4,5,6,8,9 ∞,0,4,7,8,10 ∞,1,4,8,9,10 0,1,4,7,8,9∞,4,6,7,8,9 0,4,6,7,9,10 1,4,5,7,9,10 ∞,0,5,6,7,10 ∞,1,5,6,7,9 0,1,5,6,9,10∞,5,7,8,9,10 0,5,6,7,8,9 1,6,7,8,9,10 ∞,0,6,8,9,10 ∞,1,5,6,8,10 0,1,5,7,8,10
∞,0,1,2,3,9 ∞,0,1,2,4,7 ∞, 0, 1, 2, 5, 6 ∞,0,1,2,8,10 ∞,0,1,3,4,8 ∞,0,1,3,5,7∞,0,1,3,6,10 ∞,0,1,4,5,10 ∞,0,1,4,6,9 ∞,0,1,5,8,9 ∞,0,1,6,7,8 ∞,0,1,7,9,10
2,3,4,5,6,8 2,3,4,5,9,10 2,3,4,6,7,10 2,3,5,7,8,10 2,3,6,7,8,9 2,4,5,7,8,92,4,6,8,9,10 2,5,6,7,9,10 3,4,5,6,7,9 3,4,7,8,9,10 3,5,6,8,9,10 4,5,6,7,8,10
Table 3 – A Version of the Steiner System S(5, 6, 12)
The reader should choose an arbitrary pentad (5-tuple) in P and check thatit occurs in exactly one hexad in the table above. As noted in Section 12.4,several versions of the Steiner system S(4, 5, 11) can now be read off thistable. For example, take the 66 entries above which include 0 (columns 2,4 and 6, and rows 19 and 20), delete the entry 0 from each hexad, and theresulting set is a version of S(4, 5, 11) defined on {∞, 1, 2, . . . , 10}; again thereader should choose a 4-tuple and check that it occurs in only one pentad.There is nothing special about 0, for example we could take the 66 entrieswhich include 3, say, delete 3 in each case and then we have a version ofS(4, 5, 11) on {∞, 0, 1, 2, 4, . . . , 10}.
Table 3 can also be constructed by starting with 0 and the five quadraticresidues modulo 11, that is the hexad {0, 1, 3, 4, 5, 9} marked with a star inTable 3 above, and applying the following two procedures:

12.7 Problems 12W 399
θ : {a1, . . . , a6}θ = {a1 + 1, . . . , a6 + 1} modulo 11; and
ψ : interchange 0 and 1, 2 and 10, 3 and 5, 4 and 9, and leave 6, 7, 8 and∞ fixed (the mirror reflection about the line through the point ∞ andthe mid-point of the line (0, 1) in the ‘kitten’ diagram on page 397),
then we obtain a version of the Steiner system for M11 defined on the set{0, 1, . . . , 10} (and so leaving ∞ fixed); that is θ and ψ generate M11 as asubgroup of M12. Also if we apply θ and σ where
σ : interchange 1 and ∞, 4 and 7, 5 and 8, 6 and 10, and leave 0, 2,3 and 9 fixed (the mirror reflection about the line through the lowerleft-hand point 0 and the mid-point of the line (1,∞));
then we obtain the 22 hexads set bold in Table 3 on page 398. This providesanother way to obtain M11, this time 3-transitive on a 12-element set; seethe note at the end of Section 12.4. This system has 22 members and eachtriple of integers in the chosen range occurs in exactly two members of thesystem.
It is also of interest that if we apply θ and the procedure τ where
τ : cyclically permute 0, 1 and ∞; 2, 10 and 6; 3, 5 and 8; and 4, 7and 9 (this corresponds to the map x→ (1− x)−1 modulo 11),
then we obtain a copy of L2(11) as a subgroup of M12. The permutationτ can be formed by rotating anticlockwise all of the triangles in the kittendiagram on page 397.
New Book At about the time the main text of this book appeared in print,another was published (also by Springer) which provides an introduction tothe theory of finite simple groups:
Wilson, R. A. [2009], The Finite Simple Groups.
This book gives detailed descriptions of all finite non-Abelian simple groups— alternating, classical (linear, symplectic, unitary and orthogonal), excep-tional (Suzuki, and both small and large Ree), and sporadic (partitioned asthe Suzuki chain including J2, the Fischer groups, the Monster and its sub-groups, and the Pariahs (!) including the remaining Janko groups). It con-centrates on the code-theoretical and more purely-algebraic aspects of thetheory (for example by introducing the octonians and Jordan algebras whendiscussing the Ree groups). It also gives a detailed account of the maximalsubgroups of all finite simple groups. Read in conjunction with the Atlas[1985], this new work provides the reader with a good introduction to thewhole area covered by CFGS.
12.7 Problems 12W
Problem 12.16 Explain why the list of minimal simple groups given onpage 388 is smaller than the list of N-groups.

400 12 Simple Groups of order less than 106
Problem 12.17 Show that A8 ' L4(2). This can be done directly byfinding six matrices in L4(2) which satisfy the relations in the presentationfor A8 given on page 249. Or one can argue as follows. Note that L4(2) ('GL4(2)) is isomorphic to the automorphism group of the elementary Abeliangroup C4
2 , then work in a group which has a subgroup of this type, for exampleL3(4). See also Conway and Sloane (1993), page 270.
Problem 12.18 (i) Show that the normaliser of a Sylow 13-subgroup of thegroup L3(3) has order 39, and it is a maximal subgroup of the group. Use thework in Section 12.2, the Sylow theory, and Burnside’s Normal ComplementTheorem (Theorem 6.17(20)). You can take for granted that the centraliserof the Sylow 13-subgroup has odd order.
(ii) Using Burnside’s prqs-theorem, deduce L3(3) is minimal simple.
Problem 12.19 Derive the simplicity of M11 using the following method.Let K be a proper non-neutral normal subgroup of M11 of minimal order.Use Theorem 5.38 in Web Section 5.4. to show that K is transitive, and soprove that its order is divisible by 11. Now note that K contains a Sylow11-subgroup P which is cyclic and transitive. Next show that P = CM11(P ).Further note that [NM11
(P ) : P ] = 1 or 5. To do this you will first need toshow that o(NM11
(P )) is odd, then use the N/C-theorem (Theorem 5.26).Next show that P is self-normalising in K. Finally apply the Burnside NormalComplement Theorem (Theorem 6.17) to obtain a contradiction.
Problem 12.20 This problem refers to the work discussed at the end ofthis section (Subsection (c)). On P let
ν : interchange 0 and ∞, 2 and 6, 3 and 8, 7 and 9,
and leave 1, 4, 5 and 10 fixed.
What group do you obtain using θ (as defined on page 399) and ν?
Problem 12.21 For each of the Mathieu groups we have: if G is a sim-ple group with order o(Mj) where j = 11, 12, 22, 23 or 24, then G ' Mj .Investigate what is needed to prove this in the case when j = 11.

Chapter 13
Representation and Character Theory
Representation theory has formed an integral part of the theory of finitegroups since Frobenius, Schur and others did their pioneering work over acentury ago. The solution of CFSG would not have been possible without it.In this theory the ideas, methods and theorems of linear algebra are appliedto establish essential group properties, one of which is the famous result ofFeit and Thompson which states that all groups of odd order are soluble –a major first step in the solution of the simple group problem. Charactertheory is an important part of representation theory where the representingmatrices are ‘replaced’ by complex numbers which are easier to work with.We shall see that every finite group G has a ‘character table’ which is a squarearray of complex numbers and, using this table, a number of properties of Gcan be ‘read off’; for instance we can use the table for G to list the normalsubgroups of G.
This chapter and the next should be treated as a single piece of work,together they provide an introduction to some aspects of representation andcharacter theory. Unlike others in the book, this chapter is mostly theoreti-cal developing enough basic material for the applications to be discussed inChapter 14. These applications include
The construction of character tables for some small groups includingall those with order not more than 12, A5, the Chapter 8 groups, andsome others;
A proof of Burnside’s prqs-theorem first discussed in Chapter 11; and
Some development of the theory of ‘Frobenius Groups’; a non-Abeliangroup of order pq being an example (Theorem 6.11). This work will in-troduce a number of new groups including the Suzuki Groups discussedbriefly in Section 12.4.
A summary of the main character properties is given at the end of the chapter,this is sufficient for the reader who only needs to study the applications. Fora more extensive review of character theory the reader is recommended toconsult the following texts as the author has done on many occasions:
Huppert, B. (1991) Character theory of finite groups. de Gruyner.
Issacs, I. M. (1976, reprinted 2006) Character theory of finite groups.AMS Chelsea
401

402 13 Representation and Character Theory
James, G. and Liebeck, M. (1993) Representations and charactersof groups. Cambridge University Press.
Here and in Chapter 14 we shall assume that the reader has a working knowl-edge of basic linear algebra including
(a) vector spaces, subspaces, bases, and dimension;
(b) linear maps and their representation by matrices. Also both Jordanand rational canonical forms will be used in the examples;
(c) direct sums of vector spaces,1 the notions here are of course closelyrelated to those presented in Section 7.2 relating to direct products ofAbelian groups;
(d) the basic facts about inner and Hermitian products.
The books by Halmos (1974a), Finkbeiner, D. (1966, Introduction to ma-trices and linear transformations. Freeman, San Francisco), or Rose (2002),amongst many others, will provide all that is needed.
All vector spaces and matrices discussed are defined over the complexnumber field C. We use this field because at some essential points in the theorywe require our ground field to have characteristic zero, and be algebraicallyclosed. Hence all polynomial equations with rational coefficients have at leastone real or complex root.
13.1 Representations and Modules
In this chapter and the next G always denotes a finite group, and we writeGLn for GLn(C) the group of all non-singular n × n matrices defined overthe complex field C; this is our ‘representing group’. We begin by giving thebasic
Definition 13.1 (i) A representation of G is a homomorphism θ : G →GLn. The degree of θ is n.
(ii) The kernel of the representation θ is ker θ, the kernel of the homo-morphism θ.
(iii) A representation θ is called trivial if, and only if, the homomorphism θis trivial (see Definition 4.2), and it is called faithful if, and only if, ker θ = 〈e〉.
(iv) Two representations θ1 and θ2 of the same group G are called equiv-alent if there exists a non-singular matrix A ∈ GLn with the property
gθ2 = A−1(gθ1)A for all g ∈ G. (13.1)
The relation defined by (13.1) is an equivalence relation (see Definition A1in Appendix A), the reader should check this.
1 In vector space theory the term ‘direct sum’ is normally used instead of ‘direct product’,see Chapter 7.

13.1 Representations and Modules 403
Example. We give below four representations of the dihedral group D3 =〈a, b | a3 = b2 = e, bab = a2〉.
(a) The homomorphism which maps every element of D3 to I4, the 4× 4identity matrix, is the trivial representation of D3 of degree 4.
(b) If we map a 7→ (1) and b 7→ (−1), then the corresponding represen-tation is non-faithful (reader, why?) and it has degree 1.
(c) Let ω = e2πi/3 (so ω ∈ C and ω3 = 1), and let the representation θ1be given by
aθ1 =
(ω 00 ω2
)and bθ1 =
(0 1−1 0
),
with an extension to all of D3 using the homomorphism equation. It is faithfuland has degree 2.
(d) The mapping θ2 from D3 to GL2 given by
e 7→(
1 00 1
)a 7→
(ω 2ω(1− ω)0 ω2
)a2 7→
(ω2 2ω(ω − 1)0 ω
)b 7→
(2 5−1 −2
)ab 7→
(2ω ω(4 + ω)−ω −2ω
)a2b 7→
(2ω2 ω(4ω + 1)−ω2 −2ω2
),
provides another faithful degree 2 representation of D3 which is equivalent tothe representation θ1 defined in (c) above. In fact, if we let A =
(1 20 1
), then
gθ2 = A−1gθ1A for all g ∈ D3 as the reader can check.
Introduction to G-modules
We usually discuss representations of a group G via G-modules. A G-moduleV is a ‘hybrid’ system in which G acts on the vector space V , and theseactions are also linear maps on V . In the theorems in this section we showthat a representation of G can be interpreted as a G-module and vice versa,and equivalent representations are associated with the ‘same’ G-module.
Definition 13.2 A vector space V defined over C is called a G-module2 if a‘product’ of the form vg is defined which satisfies the following five conditionsfor all u, v ∈ V, c ∈ C and g, h ∈ G:
(i) vg ∈ V,(ii) (u+ v)g = ug + vg, (iii) (cv)g = c(vg),
(iv) ve = v, and (v) v(gh) = (vg)h.
By (i), (ii) and (iii) the map v 7→ vg is a linear map on the vector space V ,and (iv) and (v) give an action of G on the ‘set’ V .
Examples. (a) The vector space 〈v〉 generated by v with vg = v for g ∈ Gand v ∈ V is clearly a G-module, it is called a trivial G-module.
2 Technically this is a right G-module.

404 13 Representation and Character Theory
(b) The 0-dimensional vector space 〈0〉, with 0g = 0 for all g ∈ G alsoclearly forms a G-module which we call the zero G-module.
(c) The standard example Let V = Cn with a representation θ : G →GLn. Define the product vg by
vg = v(gθ).
The properties (i) to (v) above follow immediately as V is a vector space andθ is a homomorphism.
(d) Permutation module Let G = S3 and let V be a 3-dimensionalvector space with basis {v1, v2, v3}. For g ∈ S3 (g is a permutation of {1, 2, 3})define
vig = vig, for i = 1, 2, 3.
Clearly vie = vi, and for g, h ∈ S3
vigh = vi(gh) = v(ig)h = (vig)h.
By linearity this can be extended to give a S3-module. Similar examples canbe constructed for Sn, n = 4, 5, . . . , and their subgroups.
(e) The regular G-module CG Construct the vector space W with basis{g1 = e, . . . , gn} where gi ∈ G and o(G) = n, the elements of W have the formv = ci1gi1 + · · ·+ cikgik where cij ∈ C, gij ∈ G, and {i1, . . . , ik} ⊆ {1, . . . , n}.(Think of v as the vector (ci1 , . . . , cij ) where the elements of G determine theposition of its entries.) Using Theorem 2.8, the module product is given by
vh = ci1gi1h+ · · ·+ cikgikh where h ∈ G.
Check that the module axioms (Definition 13.2) hold, see Problem 13.1.
Different matrices can represent the same linear map on V, this is relatedto the choice of bases for V . Hence we need to bring these bases into ourtheory. Using G-modules avoids this, but in some cases we need to considerthe underlying spaces, see Definition 13.1(iv) and Theorem 13.4. Given a G-module V , the map v 7→ vg is a linear map by definition, and so if V has abasis B, this map is represented by a matrix depending on B. We denote thisn× n matrix (where n = dimV ) by
(g;B).
Theorem 13.3 (i) Suppose θ : G → GLn is a representation of G. LetV = Cn be a copy of the n-dimensional vector space over C. The space Vbecomes a G-module if we define the module product vg by
vg = v(gθ) for v ∈ V and g ∈ G. (13.2)
Also there is a basis B for V which satisfies
gθ = (g;B) for all g ∈ G. (13.3)

13.1 Representations and Modules 405
(ii) Conversely, if V is a G-module with basis B, then the map
g 7→ (g;B) where g ∈ G
defines a representation of G.
Proof. (i) We need to verify the five conditions in Definition 13.2. Thefirst follows by definition, the second and third follow using matrix addi-tion and scalar multiplication, and the last two follow because the repre-sentation θ is a group homomorphism. Hence V is a G-module with theproduct given by (13.2). If we take B = {(1, 0, . . . , 0), . . . , (0, . . . , 0, 1)}as the basis for V , then (13.3) also follows.
(ii) As V is a G-module with basis B, we have v(gh) = (vg)h forg, h ∈ G and v ∈ B. Hence by linearity
(gh;B) = (g;B)(h;B) and so (e;B) = (g;B)(g−1;B)
for g ∈ G. But ve = v for v ∈ V , and so (e;B) = In, the n× n identitymatrix. This shows that (g;B) is invertible, and so it belongs to GLn;that is the map g 7→ (g;B) gives a representation of G. 2
We now consider equivalent representations, see Definition 13.1(iv), andExamples (c) and (d) on page 403.
Theorem 13.4 Suppose V is a G-module with basis B and θ : G → GLnis a representation of G.
(i) If B1 is another basis for V , then the representation θ1 of G given by
gθ1 = (g;B1) for all g ∈ G
is equivalent to θ.
(ii) If θ2 is a representation of G which is equivalent to θ, then there exists abasis B2 of V which satisfies
gθ2 = (g;B2) for all g ∈ G.
Proof. (i) Let C be the non-singular matrix which transforms thebasis B (of V ) to the basis B1. Then we have
(g;B) = C−1(g;B1)C
for all g ∈ G (see (13.3)) which shows immediately that θ and θ1 areequivalent.
(ii) As θ and θ2 are equivalent, we can find a non-singular matrix C ′
to satisfygθ = (C ′)−1(gθ2)C ′
for all g ∈ G. Now let B2 be the basis of V formed by applying C ′ to thebasis B. Then the equation in (i) gives (g;B) = (C ′)−1(g;B2)C ′, fromwhich we obtain gθ2 = (g;B2) for all g ∈ G. 2

406 13 Representation and Character Theory
See Example (d) on page 403, here if we take B = {(1, 0), (0, 1)} and C =(1 −20 1
), then B2 = {(1, 2), (0, 1)}.
Subsystems of G-modules are given by the following
Definition 13.5 A subset U of a G-module V is called a G-submodule ofV if (a) U is a (vector) subspace of V , and (b) ug ∈ U for u ∈ U and g ∈ G.
We shall see below that G-submodules of a G-module behave much like nor-mal subgroups in a group. Some examples are given after the next definition.
We look now at the natural maps between modules.
Definition 13.6 (i) A map φ : V1 → V2, where V1 and V2 are G-modules, iscalled a G-homomorphism if it is a linear map between V1 and V2 (consideredas vector spaces), and for all v ∈ V1 and g ∈ G we have
(vg)φ = (vφ)g.
The kernel and image are defined as for group homomorphisms, that is kerφ ={v ∈ V1 : vφ = 0} and imφ = {vφ : v ∈ V1}.
(ii) A G-homomorphism φ is called a G-isomorphism if φ is an invertiblelinear map; in this case we write V1 ∼= V2.
Examples. (a) Let V be a G-module and c ∈ C. The map θ1 given byvθ1 = cv, for v ∈ V , is a G-homomorphism. The reader should check this andfind the kernel and image; see Problem 13.1.
(b) Let V be the permutation module given in Example (d) on page 404and let U = 〈u〉 be a trivial G-module; see Example (a) given at the bottomof page 403. Define θ2 by
(c1v1 + c2v2 + c3v3)θ2 = (c1 + c2 + c3)u, where ci ∈ C.
So viθ2 = u for i = 1, 2 and 3. Clearly θ2 is linear, and if v =∑3i=1 civi and
g ∈ S3, then
(vg)θ2 = (c1v1g + c2v2g + c3v3g)θ2 = (c1 + c2 + c3)u, and
(vθ2)g = (c1 + c2 + c3)ug = (c1 + c2 + c3)u.
In the first line above (1g, 2g, 3g) is a permutation of (1, 2, 3) as the group isS3 in this example. Hence θ2 is a S3-homomorphism, the kernel is {c1v1 +c2v2 + c3v3 : c1 + c2 + c3 = 0}, and the image is U . We shall return to thisuseful example later.
The following result is important, note that unlike normal subgroups inthe group case, both the kernel and the image of φ are G-submodules.
Theorem 13.7 Suppose V1 and V2 are G-modules and φ : V1 → V2 is aG-homomorphism.
(i) kerφ is a G-submodule of V1, and imφ is a G-submodule of V2.
(ii) If φ is a G-isomorphism, then the map φ−1 : V2 → V1 is also a G-isomorphism.

13.1 Representations and Modules 407
Proof. (i) Both kerφ and imφ are (vector) subspaces as φ is a linearmap. Secondly, if v ∈ kerφ and g ∈ G, then using Definition 13.6 wehave
(vg)φ = (vφ)g = 0g = 0 and so vg ∈ kerφ,
that is kerφ is a G-submodule of V1. Further if v′ ∈ imφ, then we canfind u ∈ V1 to satisfy v′ = uφ, and
v′g = (uφ)g = (ug)φ ∈ imφ,
that is imφ is a G-submodule of V2.
(ii) φ−1 is a non-singular linear map by definition (see Appendix A).Also for v ∈ V2 and g ∈ G we have, as φ is a G-homomorphism,
((vφ−1)g)φ = ((vφ−1)φ)g = vg = ((vg)φ−1)φ.
But φ is a G-isomorphism, and so the result follows. 2
For an example see (b) on page 406.
The following will be useful later, it shows that representations are equiv-alent if, and only if, the corresponding modules are isomorphic.
Theorem 13.8 Suppose V1 and V2 are G-modules.
(i) V1 ∼= V2 if, and only if, there are bases Bi for Vi, i = 1, 2, which satisfy,for all g ∈ G,
(g;B1) = (g;B2). (13.4)
(ii) If V1 has basis B and V2 has basis B′, then the representations
θ1 : g 7→ (g;B) and θ2 : g 7→ (g;B′)
are equivalent if, and only if, V1 ∼= V2.
Proof. (i) Suppose φ : V1 → V2 is a G-isomorphism, and {v1, . . . , vn}is the basis B1. For g ∈ G and i = 1, . . . , n we have
vig = ci1v1 + · · ·+ cinvn.
Let wi = viφ where cij ∈ C and wi ∈ V2. Then
wig = (viφ)g = (vig)φ = (ci1v1 + · · ·+ cinvn)φ
= ci1v1φ+ · · ·+ cinvnφ = ci1w1 + · · ·+ cinwn.
As this holds for each i the result follows by linearity.
Conversely, suppose B1 = {v1, . . . , vn} is a basis for V1 and B2 ={w1, . . . , wn} is a basis for V2 both of which satisfy (13.4) for all g ∈ G.Further, suppose ψ is the non-singular linear map given by viψ = wifor i = 1, . . . , n. Now using (13.4) we have (vig)ψ = (viψ)g for eachi = 1, . . . , n and g ∈ G. Hence ψ is a G-isomorphism, and (i) follows.
(ii) This follows by (i) and Theorem 13.4. 2

408 13 Representation and Character Theory
13.2 Theorems of Schur and Maschke
We begin with
Definition 13.9 A non-zeroG-module V is called irreducible, or sometimessimple, if it contains no G-submodules apart from 〈0〉 and V , otherwise it iscalled reducible.
A vector space V (with dimV = n) defined over a field F is isomorphicto Fn, the direct sum of n copies of the field F – it is isomorphic to a directsum of n subspaces each with dimension 1. A similar result holds for G-modules except that the summands often have dimension larger than onebecause the summands in question are irreducible (Definition 13.9), and sothey have no proper non-zero submodules. There is an analogy here withinteger unique factorisation. The module result follows from the theorems ofI. Schur and H. Maschke to be proved in this section. We begin with Schur’sLemma which characterises irreducible modules. We use the symbol ιV todenote the identity (linear) map on V (vιV = v for all v ∈ V ).
Theorem 13.10 (Schur’s Lemma) Suppose V1 and V2 are irreducibleG-modules.
(i) A G-homomorphism φ : V1 → V2 is either a G-isomorphism or the trivialhomomorphism: vφ = 0, for all v ∈ V1.
(ii) A G-isomorphism ψ : V1 → V1 is a scalar multiple of the identity mapιV1 .
Proof. (i) Suppose φ is not the trivial homomorphism. So there existsv ∈ V satisfying vφ 6= 0 which implies imφ 6= 〈0〉. Hence by Theorem13.7, and as V2 is irreducible, we have imφ = V2. Using Theorem 13.7again, this shows that kerφ 6= V1, and so kerφ = 〈0〉 as V1 is irreducible;that is φ is a G-isomorphism, see Definition 13.6.
(ii) A non-singular linear map on V1 has at least one eigenvalue c inthe complex field C. This follows because C is algebraically closed, andas a consequence a non-zero eigenvector also exists. This shows thatker(ψ − c ιv1) 6= 〈0〉. The module V1 is irreducible, and so by Theorem13.7, ker(ψ − c ιV1
) = V1 which gives the result. 2
Both the the matrix version and the converse of this result are given inProblem 13.4.
Example. We apply the matrix version of Schur’s result given in Problem13.4. Let C4 = 〈a : a4 = e〉, and define a representation σ : C4 → GL2 by
aσ =
(i 00 −1
).
Now the matrix(i 00 −i
)commutes with gσ for all g ∈ C4, and so by the matrix
version of Schur’s Lemma it follows that the C4-module associated with σ isreducible. This also follows from the theorem below or by direct calculationusing the subspaces 〈(1, 0)〉 and 〈(0, 1)〉.
13.2 Theorems of Schur and Maschke 409
An almost immediate consequence of Schur’s result shows that all irre-ducible representations of a finite Abelian group have degree 1 as we provenow.
Theorem 13.11 If G is Abelian, then every irreducible G-module has di-mension 1.
Proof. If V is an irreducible G-module and a ∈ G, then
(vg)a = (va)g for all g ∈ G
as G is Abelian. Hence the non-singular linear map v 7→ va is a G-homomorphism (Definition 13.6), and so by Schur’s Lemma
va = c∗v for some suitably chosen c∗ ∈ C depending on a.
But V is irreducible, and so dimV = 1; for if not V would contain a1-dimensional submodule. 2
Using this result we can list the irreducible representations of a cyclicgroup as follows: LetG = Cn = 〈a〉, let ω = e2πi/n, and let r satisfy 1 ≤ r < n,then the r-th irreducible representation θr of G is given by
asθr = ωrs for 0 ≤ s < n.
These equations do indeed give the irreducible representations of G as eachhave degree 1. Using this and the Fundamental Theorem of Abelian Groups(Theorem 7.12) all irreducible representations of a finite Abelian group canbe given. Theorem 13.11 is sufficient for our purposes, more details can befound in the references quoted at the beginning of this chapter.
Maschke’s Theorem
If V is a G-module and U1 is a submodule, we can always find anothersubmodule U2 so that V = U1 ⊕ U2, the direct sum of U1 and U2. We givethis remarkable result now, it was first proved by Maschke in 1898. The proofis constructive providing a method for building U2 given U1 and V .
Theorem 13.12 (Maschke’s Theorem) If U1 is a G-submodule of theG-module V , then we can find another G-submodule U2 of V to satisfy
V = U1 ⊕ U2.
Note that Maschke’s result is invalid if the group G is infinite, or if o(G) isfinite AND we work over a field of positive characteristic p where p | o(G).
Proof. Note first that U1 is a subspace (of V ), let {u1, . . . , ur} bea basis. By a standard property of vector spaces we can find vectorsur+1, . . . , un ∈ V \U1 so that {u1, . . . , ur, ur+1, . . . , un} is a basis for V .Let W be the subspace of V generated by the set {ur+1, . . . , un}. Then

410 13 Representation and Character Theory
V = U1 ⊕W, (13.5)
that is the vector space V is isomorphic to the direct sum of the sub-spaces U1 and W . To prove the theorem we ‘adjust’ W so that it formsa submodule whilst insuring that (13.5) still holds.
If v ∈ V , then v can be expressed in the form v = u + w whereu ∈ U1, w ∈W , and both u and w are unique; this follows because thesum in (13.5) is direct. Hence the map ψ : V → V given by vψ = uwhere v ∈ V is well-defined and linear, it has kernel W and image U1.The ‘adjustment’ mentioned above is constructed using the map φ onV which is defined as follows. If g ∈ G and v ∈ V , let
vφ =1
o(G)
∑g∈G
vgψg−1. (13.6)
Note that (a) by our convention, vgψg−1 = ((vg)ψ)g−1 using the prod-uct in V , and (b) if ψ is a G-homomorphism then φ = ψ. In generalψ is not a G-homomorphism, but it is a linear map on V whose imageis contained in U1. On the other hand φ is a G-homomorphism as weshow now.
If j ∈ G, we have (vj)gψg−1 = v(jg)ψg−1j−1j = (vhψh−1)j pro-vided h = jg by (v) in Definition 13.2. Hence
(vj)φ =1
o(G)
∑g∈G
(vj)gψg−1 =1
o(G)
∑h∈G
(vhψh−1)j = (vφ)j
by Theorem 2.8, that is φ is a G-homomorphism. The map φ is alsoidempotent, that is it satisfies
φ2 = φ. (13.7)
For if u ∈ U1 and g ∈ G, then ug ∈ U1 (as U1 is a G-module), and so(ug)ψ = ug and ((ug)ψ)g−1 = u. Hence
uφ =1
o(G)
∑g∈G
ugψg−1 =1
o(G)
∑g∈G
u = u. (13.8)
Now if v ∈ V , vφ ∈ U1 (by definition of U1 and (13.6)), and so (vφ)φ =vφ by (13.8). This holds for all v ∈ V , hence (13.7) follows. By ProblemA4(iii) in Appendix A, this shows that φ is a projection of V onto U1.As it is also a G-homomorphism, we can now define U2 = kerφ, thenU2 is a G-submodule by Theorem 13.3, and so finally V = U1 ⊕ U2, adirect sum of two G-submodules. 2
Example. We extend Examples (d) on page 404 and (b) on page 406 con-cerning the permutation module V for S3. We showed in the second ofthese examples that U1 = 〈v1 + v2 + v3〉 is a G-submodule of V , so byMaschke’s Theorem above, there exists another G-submodule U2 with theproperty V = U1 ⊕U2. Following the procedure given in the proof above, let

13.2 Theorems of Schur and Maschke 411
W = 〈v2, v3〉. As subspaces V = U1 ⊕W , but W is not a G-submodule. Theprojection map ψ from V to U1 given by
v1ψ = v1 + v2 + v3, v2ψ = 0, v3ψ = 0
is a G-homomorphism, see Problem 13.1. Again following the proof ofMaschke’s Theorem above let φ be defined by
viφ =1
3(v1 + v2 + v3) for i = 1, 2, 3.
This is a G-homomorphism, and its kernel is a G-submodule of V (by Theo-rem 13.3) which we can take to be U2. In fact we can set
U2 = kerφ = 〈v2 − v1, v3 − v1〉.
Our first application gives the following important theorem, to state itwe need
Definition 13.13 A G-module is called completely reducible, or sometimessemi-simple, if it can be expressed as a direct sum V = U1 ⊕ · · · ⊕ Un whereeach Ui is irreducible and n ≥ 1.
Theorem 13.14 Every non-zero G-module is completely reducible.
As with Maschke’s Theorem this result fails if we change our underlying fieldC to one with positive characteristic p where p | o(G), even if it is algebraicallyclosed.
Proof. If V is irreducible, there is nothing to prove. Hence we maysuppose V contains a proper non-zero G-submodule U1. By Maschke’sTheorem (Theorem 13.12) we can find another G-submodule U2 to sat-isfy V = U1 ⊕ U2. If both U1 and U2 are irreducible then we are done,if not we can use induction on the dimension of V as both U1 and U2
have smaller dimension than dimV . 2
Our second application of Maschke’s Theorem shows we can sometimesassume that the matrices (g;B) used in Theorem 13.3 are diagonal providedwe choose the ‘right’ basis B. But note this result only applies to individualelements g in G.
Theorem 13.15 Suppose V is a non-zero G-module and g ∈ G.
(i) We can find a basis B for V so that (g;B) is diagonal.
(ii) The diagonal entries of the matrix given in (i) are m-th roots of unitywhere g has order m in G.
Proof. Let J be the cyclic subgroup of G generated by g with orderm, and let W be a non-zero J-module. By Theorem 13.14 we can writeW as
W = U1 ⊕ · · · ⊕ Ut,

412 13 Representation and Character Theory
where each Ui is irreducible. As J is Abelian we have by Theorem 13.11,dimUi = 1 for i = 1, . . . , t; and so each Ui has a single generatingvector ui, say. Hence as Ui is a G-module of dimension 1 (and so isautomatically irreducible). Further, by Schur’s Lemma (Theorem 13.10)we can find integers rj to satisfy
ujg = ωrjuj (13.9)
for each i where ω = e2πi/m. Note ri ∈ Z, this follows from the commentbelow the proof of Theorem 13.11. Therefore if we take {u1, . . . , ut} asthe basis B for W , then (13.9) gives
(g;B) =
ωr1 0 . . . 00 ωr2 . . . 0· · . . . ·0 0 . . . ωrt
.
Both parts of the theorem now follow. 2
13.3 Characters and Orthogonality Relations
Characters will be introduced now and their basic orthogonality propertieswill be established. The work is of a similar level to that of the previoussections, but some proofs are quite long and involved, so time will be neededto assimilate them; writing them out in detail in the 2×2 case can sometimeshelp. The trace of a matrix A, tr(A) is defined as the sum of the main diagonalelements of A: If A = (aij), then tr(A) =
∑ni=1 aii. We have, for square
matrices A and B, see Problem 13.7,
(a) tr(A+B) = tr(A) + tr(B), (b) tr(cA) = c tr(A) for c ∈ C,(c) tr(AB) = tr(BA), (d) tr(B−1AB) = tr(A).
These properties are used widely in the sequel. In both linear algebra and ourrepresentation theory it is surprising how much information about a matrixis retained by the trace. Below we define the character of a representation asthe trace of the corresponding matrix, and we call a character irreducible ifits corresponding G-module is irreducible. Each group G has attached to ita collection of irreducible characters, and many of the properties of G can beobtained by studying this collection.
Definition 13.16 Let G be a finite group.
(i) A class function ψ on G is a function mapping the elements of G intoC which takes the same value for each element of a conjugacy class of G:If j = h−1gh and g, h, j ∈ G, then ψ(j) = ψ(g). The collection of all classfunctions on G is denoted by CF (G).

13.3 Characters and Orthogonality Relations 413
(ii) If V is a non-zero G-module and θ is a corresponding representation(Theorem 13.3), then the function χ mapping elements of G to C defined by
χ(g) = tr(gθ) for g ∈ G
is called the character of the G-module V , and of the representation θ (Theo-rem 13.17(ii)). The degree of the character χ is the degree of the correspondingrepresentation, if gθ is an n× n matrix then the degree of χ is n.
(iii) The character of the trivial representation of G, 1G, is called theprincipal character,3 and 1G = 1 for all g ∈ G. In character tables 1G isusually written as χ1.
Example. Consider the representation given in Example (c) on page 403.The character χ of this representation of D3(' S3) is calculated as follows.We have χ(e) = tr(I2) = 2, and
χ(a) = tr((
ω 00 ω2
))= ω + ω2 = −1, χ(b) = tr
((0 1−1 0
))= 0.
Similar calculations which the reader should check show that χ(a2) = −1and χ(ab) = χ(a2b) = 0. Note that (a) χ is constant on the conjugacy classesof D3, and (b) we obtain the same values for χ if we use the equivalentrepresentation for D3 given in Example (d) on page 404; reader check. Thischaracter for D3 is called the minor permutation character (Problem 13.16).
We shall see later that CF (G) can be treated as a vector space over C,and the irreducible characters to be defined below act as a basis for this space.The simplest character properties are as follows, note particularly (ii) below,it shows that equivalent representations have the same character.
Theorem 13.17 (i) A character χ for G is a class function for G.
(ii) If V1 and V2 are isomorphic G-modules, then their characters are equal.
(iii) If Vi are G-modules with characters χi, where 1 ≤ i ≤ m, and V =V1 ⊕ · · · ⊕ Vm, then the character χ of V is given by
χ =∑m
i=1χi.
Proof. (i) Let θ be a representation ofG corresponding to theG-moduleV , and suppose gθ = (g;B), see Theorem 13.4, then for a, g ∈ G wehave using properties of the trace function given opposite and the factthat θ is a homomorphism,
χ(a−1ga) = tr(a−1gaθ) = tr((aθ)−1gθaθ)
= tr((a;B)−1(g;B)(a;B)) = tr(g;B) = tr(gθ) = χ(g).
3 Some authors use the term trivial character but this gives the wrong impression for it isthe only character which is attached to every group, and so it plays a more important rolein character theory than the trivial homomorphism does in group theory as a whole.

414 13 Representation and Character Theory
(ii) By Theorem 13.8 we can find bases B1 for V1 and B2 for V2 withthe property (g;B1) = (g;B2) for all g ∈ G. Now if we take the trace ofeach of these matrices we obtain the result.
(iii) We can choose a basis for V so that the matrix of the represen-tation associated with the G-module V is in diagonal block form wherethe i-th block is the matrix corresponding to the G-module Vi. It is nowclear that the trace of the matrix for V is the sum of the traces of theindividual blocks. 2
Orthogonality Relations
The orthogonality relations are amongst the most important tools in charac-ter theory, we shall develop them now. We use the following standard con-ventions: (a) the notation (aij) stands for the matrix whose (i, j)th entry isaij , a complex number, and (b) the delta function δij stands for the functionwhich takes the value 1 if i = j, and 0 if i 6= j.
The first orthogonality relation is given by the following
Theorem 13.18 Suppose θ1 and θ2 are irreducible representations of Gwith corresponding G-modules V1 and V2, and degrees n1 and n2, respectively.Further suppose their representing matrices are given by
gθ1 = (aij(g)) and gθ2 = (bij(g)) for g ∈ G.
If θ1 and θ2 are not equivalent, and so V1 6' V2, then for all i, j, k and l
(i)∑
g∈Gaij(g)bkl(g
−1) = 0,
(ii)∑
g∈Gaij(g)akl(g
−1) = δjkδilo(G)/n1.
Proof. Let C = (cjk) be an arbitrary n1 × n2 matrix, and let
D(C) =∑
g∈G(aij(g))C(bkl(g
−1)).
This is also an n1 × n2 matrix. We show first that D(C) represents aG-homomorphism, a consequence of the following calculation. We have,for all h ∈ G,
(aij(h))D(C) =∑
g∈G(aij(h))(aij(g))C(bkl(g
−1))(bkl(h−1))(bkl(h))
=∑
g∈G(aij(hg))C(bkl((hg)−1))(bkl(h))
as θ1 and θ2 are homomorphisms
= D(C)(bkl(h)) (13.10)
by Theorem 2.8 as (bkl(h))−1 = (bkl(h−1)) by Theorem 13.3. Hence
D(C) defines a G-homomorphism.

13.3 Characters and Orthogonality Relations 415
(i) By Schur’s Lemma (Theorem 13.10), as both V1 and V2 are irre-ducible and inequivalent, and as D(C) : V1 → V2 is a G-homomorphism,we have D(C) = O (the zero matrix) for all choices of the coefficientscij of C. Hence if we set crs = δrjδsk (and so crs depends on j and k),then the (i, l)th entry of D(C) gives
0 =∑
g∈G
∑r,sair(g)δrjδskbsl(g
−1) =∑
g∈Gaij(g)bkl(g
−1),
and (i) follows. Note that the inner sum of the middle expression aboveis the (i, l)th term of the triple matrix product (air(g))(crs)(bsl(g
−1)).
(ii) Using Schur’s Lemma again, if V1 = V2 (and so n1 = n2), then
D(C) = tCIn1(13.11)
for some complex constant tC depending on C. This gives
tCn1 = tr(D(C)) = tr(∑
g∈G(aij(g))C(akl(g
−1)))
= o(G)tr(C)
applying the trace properties (a) and (d) on page 412 to establish thelast equation. Now using the same values of crs as in (i), and writingC = Cjk, we see that tr(Cjk) = δjk, and so tCjk
n1 = o(G)δjk. (Noteδ1jδ1k + · · · + δnjδnk = δjk.) Combining this with equation (13.11) weobtain ∑
g∈G(aij(g))Cjk(akl(g
−1)) = (δjko(G)/n1)In1.
Taking corresponding individual entries of these matrices we have finally∑aij(g)akl(g
−1) = δjkδilo(G)/n1. 2
The following ‘character version’ of this theorem is due to Frobenius.
Theorem 13.19 Using the notation given in Theorem 13.18, let χi be thecharacter of the G-module Vi and so also of the representation θi, for i = 1, 2.If V1 6' V2, then ∑
g∈Gχ1(g)χ2(g−1) = 0, and∑
g∈Gχ1(g)χ1(g−1) = o(G).
Proof. As χ1(g) = tr((aij(g))) and χ2(g−1) = tr((bij(g−1))) we have
∑g∈G
χ1(g)χ2(g−1) =∑
g∈G
∑i,jaii(g)bjj(g
−1)
=∑
i,j
∑g∈G
aii(g)bjj(g−1) = 0.

416 13 Representation and Character Theory
using Theorem 13.18. A similar argument gives the second equation, inthis case matrices are n1 × n1. 2
The next lemma collects together some further basic character properties.
Lemma 13.20 Suppose χ is a character of a G-module V with degree n,and suppose θ is a corresponding representation.
(i) χ(e) = dimV .
(ii) If g ∈ G and o(g) = r, then χ(g) is a sum of r-th roots of unity.
(iii) χ(g−1) = χ(g) for all g ∈ G.
(iv) For all g ∈ G|χ(g)| ≤ χ(e),
and equality occurs if, and only if, gθ = cIn for some c ∈ C.
(v) ker θ = {g ∈ G : χ(g) = χ(e)}.(vi)
∑g∈G χ(g)χ(g−1) > 0.
Proof. (i) Suppose dimV = n, and B is a basis for V . Then (e;B) = In,see the proof of Theorem 13.3, and so χ(e) = tr(e;B) = trIn = n.
(ii) By Theorem 13.15 we can find a basis B for V so that the matrix(g;B) is diagonal. Then (gθ)r = grθ = eθ = In. Each diagonal elementof (g;B) is an r-th root of unity, and the result follows as χ(g) equalsthe sum of these diagonal elements.
(iii) Following on from (ii) suppose the diagonal elements of (g;B)are ω1, . . . , ωn. The diagonal elements of (g−1;B) are ω−11 , . . . , ω−1n , andω−1i = ωi (as the ω are roots of unity). The result follows using someelementary complex number properties.
(iv) By (ii), χ(g) is a sum of the form ω1+· · ·+ωn, say, where |ωi| = 1for all i. Hence
|χ(g)| = |ω1 + · · ·+ ωn| ≤ |ω1|+ · · ·+ |ωn| = n = χ(e).
Now note that equality can only occur if ω1 = · · · = ωn in which case(g;B) = ω1In. Conversely, if gθ = cIn for some c ∈ C, then c is an r-throot of unity and χ(g) = nc. Hence by (i) |χ(g)| = n = χ(e).
(v) If g ∈ ker θ then gθ = In, and so χ(g) = n = χ(e). Converselyif χ(g) = χ(e), then by (iv) gθ = cIn for some c ∈ C and all g ∈ Gincluding g = e. Hence c = 1 and g ∈ kerχ.
(vi) This follows immediately from (ii) as χ(g)χ(g−1) = χ(g)χ(g) =|χ(g)|2 ≥ 0, and χ(g) 6= 0 for at least one element g in G. 2
In Example (e) on page 404 we introduced the regular module of G de-noted by CG. We can now use this module to obtain some more characterproperties for G. By Theorem 13.14 we can express this module as a directsum of the form
13.3 Characters and Orthogonality Relations 417
CG = r1V1 ⊕ · · · ⊕ rtVt, (13.12)
where t, r1, . . . , rt are positive integers, and V1, . . . , Vt are irreducible G-modules non-isomorphic in pairs.

418 13 Representation and Character Theory
Theorem 13.21 Suppose CG is expressed as in (13.12) and has characterρ, and for i = 1, . . . , t suppose Vi has character χi.
(i) χi(e) = ri = dimVi for i = 1, . . . , t.
(ii)∑ti=1 χi(e)χi(g) = ρ(g) =
{o(G) if g = e,
0 if g 6= e.
(iii)∑ti=1 r
2i = o(G).
(iv) Every irreducible G-module V occurs in the sum (13.12).
Proof. By definition the elements of G form a basis for the regularG-module CG. Hence by (13.12), and Theorems 2.8 and 13.17(iii)
∑t
i=1riχi(g) = ρ(g) =
{o(G) if g = e
0 if g 6= e(13.13)
Now suppose χ is a character of an irreducible G-module. If we multiplyequation (13.13) throughout by χ(g−1), and sum over all g ∈ G, weobtain
o(G)χ(e) =∑
g∈Gρ(g)χ(g−1) =
∑t
i=1ri∑
g∈Gχi(g)χ(g−1).
(Note that as there is only one non-zero term on the right-hand side of(13.13) the equation above starts with a single term.) If we set χ = χjin this equation (i) follows by Theorem 13.19 and Lemma 13.20(i).
(ii) This follows using the same theorem, and (iii) follows from (i)and (ii).
(iv) If we assume that the irreducible character χ does not equal χifor all i in the range 1 ≤ i ≤ t, then χ(e) = 0 which is impossible byLemma 13.20(i); hence (iv) follows. 2
We now bring conjugacy classes into our theory and, as we shall see, theyplay an important role. Let C`1 = {e}, . . . , C`h(G) be a list of the conjugacy
classes of G; where as usual h(G) denotes the class number. We set C`−1i ={g−1 : g ∈ C`i}; it is another conjugacy class of G (Problem 5.7). For eachi in the range 1, . . . , h(G), let i∗ be given by: C`i∗ = C`−1i . Further, for theregular module CG we define bi, i = 1, . . . , h(G), and Z(CG) by
bi =∑
g∈C`ig,
andZ(CG) = {a : a ∈ CG and ac = ca for all c ∈ CG};
see Problem 13.6. Note the similarity with the centre of a group.
Lemma 13.22 Using the notation set out above we have
(i) The set B = {b1, . . . , bh(G)} forms a basis for Z(CG) over C.

13.3 Characters and Orthogonality Relations 419
(ii) Non-negative integers sijk can be found to satisfy
bibj =∑h(G)
k=1sijkbk for 1 ≤ i, j, k ≤ h(G). (13.14)
(iii)sij1 =
{0 if j 6= i∗
o(C`i) if j = i∗
where i∗ was defined on the previous page.
Proof. (i) Suppose a ∈ Z(CG). As a ∈ CG we can write a =∑agg
for suitably chosen integers ag depending on a. Now a ∈ Z(CG) if, andonly if, a = h−1ah for all h ∈ G. Hence the integers ag are constant asg ranges over the conjugacy classes C`i. Therefore we can write
a =∑h(G)
i=1ribi where ri ∈ Z+.
The integers ri are positive and depend on the terms of ag, and thebi were defined on page 417. So Z(CG) is generated by B. Further, asconjugacy classes are pair-wise disjoint, this equation shows that theelements of the set B is linearly independent over C, and so form abasis for Z(CG).
(ii) By (i) each element of Z(CG) can be expressed as a linear com-bination of basis elements, hence sijk ∈ Z and (13.14) holds. Theseintegers are non-negative, for by (13.14) the integer sijk counts thenumber of pairs (c1, c2) where c1 ∈ C`i, c2 ∈ C`j and c1c2 ∈ C`k, andso being a counting function it must be non-negative.
(iii) Note first C`1 = {e}. Using the notation in (ii), if j 6= i∗ thenc1c2 6= e for all c1 ∈ C`i and c2 ∈ C`j ; hence sij1 = 0. But if j = i∗,then for every c1 ∈ C`i there is a unique c2 ∈ C`j with the property:c1c2 = e; so in this case sijk = o(C`i). 2
The following rather technical lemma will be used to establish our secondset of orthogonality relations (Theorem 13.24). Part (ii) will also be used inthe proof of Lemma 14.1.
Lemma 13.23 (i) Suppose χ is a character of an irreducible G-module,and ti = o(C`i) for 1 ≤ i ≤ h(G).
tiχ(gi)/χ(e) · tjχ(gj)/χ(e) =∑h(G)
k=1sijktkχ(gk)/χ(e).
(ii) The complex number tiχ(gi)/χ(e) is an eigenvalue of the matrix whose(j, k)th entry is sijk as given in Lemma 13.22.
Proof. Let θ be a representation associated with χ, that is a homo-morphism from G to GLn. We can extend θ to a homomorphism fromCG to GLn by setting
(a1g1 + · · ·+ amgm)θ = a1(g1θ) + · · ·+ am(gmθ)

420 13 Representation and Character Theory
where m = o(G). By Lemma 13.22, the elements bi belong to the centreof CG, and so commute with all g ∈ G. Therefore if ci ∈ Z(CG) thenciθgθ = gθciθ for all g ∈ G. By Problem 13.6 we have
ciθ = qiIn for some qi ∈ C, (13.15)
where n equals the degree of θ. Now taking traces we obtain
qiχ(e) = tr(qiIn) = tr(∑
g∈C`igθ)
= tiχ(gi),
or qi = tiχ(gi)/χ(e) where ti = o(C`i). But by Lemma 13.22 and as θis a homomorphism we obtain
ciθ · cjθ =∑h(G)
k=1sijkckθ.
(i) now follows using (13.15).
(ii) If Si = (sijk) is the matrix whose (j, k)th entry is sijk, andv = (r1, . . . , rh(G)), then we have vSi = qiv. Hence v is an eigenvectorfor Si; note that r1 = 1, and so v is not the zero vector. 2
Using this result we can now derive the second set of orthogonal relations,now summed over characters rather than elements. As usual we let C`{g}denote the conjugacy class of G that contains g.
Theorem 13.24 (Column Orthogonality Relations) Suppose χ1, . . . , χlare the characters of the irreducible G-modules, then∑l
r=1χr(g)χr(h
−1) =
{0 if h 6∈ C`{g}o(CG(g)) if h ∈ C`{g} (13.16)
Proof. By Lemma 13.23 applied to χr and using the notation set upthere we have
tiχr(gi) · tjχr(gj) =∑h(G)
k=1sijktkχr(gk)χr(e).
Summing over r = 1, . . . , l and using Theorem 13.21(ii) this gives
titj∑l
r=1χr(gi)χr(gj) =
∑h(G)
k=1sijktk
∑l
r=1χr(gk)χr(e)
= sij1t1o(G) = sij1o(G)
as t1 = o(C`{e}) = 1. Now by Lemma 13.22(iii) and Problem 5.7,sij1 = 0 if g−1j 6∈ C`{gi}, and sij1 = o(C`{gi}) = ti, if g−1j ∈ C`{gi}.Therefore
tj∑l
r=1χk(gi)χk(g−1i ) = δijo(G).
The first part of the theorem follows. The second part also follows usingTheorem 5.19. 2

13.3 Characters and Orthogonality Relations 421
The set of all class functions CF (G) of a group G can be given thestructure of an Hermitian vector space. It is a space of dimension h(G) overC with an Hermitian product 〈 , 〉G defined as follows.
Definition 13.25 For f1, f2 ∈ CF (G) the function 〈 , 〉G : CF (G) ×CF (G)→ C is given by
〈f1, f2〉G =1
o(G)
∑g∈G
f1(g)f2(g).
Example. Suppose G = C4 ' 〈a〉 where a4 = e. Let class functions αand β be given by αe = 3, αa = i, αa2 = 1, αa3 = −i and βe = 2, βa =1 + i, βa2 = 0, βa3 = 1, then
〈α, α〉C4= (1/4)(32 + i(−i) + 12 + (−i)i) = 3
〈α, β〉C4= (1/4)(3 · 2 + i(1− i) + 1 · 0 + (−i) · 1) = 7/4
〈β, β〉C4 = (1/4)(22 + (1 + i)(1− i) + 0 + 12) = 7/4.
Reader, repeat this calculation by replacing the last equation by βa3 = 1− i.
The following useful Hermitian and related properties follow easily fromthe orthogonality relations proved above.
Theorem 13.26 (i) There are exactly h(G) irreducible G-modules (up toisomorphism).
(ii) For i = 1, . . . , h(G), if χi is the character of the i-th irreducible G-modulegiven by (i) then {χ1, . . . , χh(G)} is an orthonormal basis for CF (G).
(iii) 〈χi, χj〉G = δij for 1 ≤ i, j ≤ h(G).
(iv)∑h(G)i=1 χi(e)
2 = o(G).
Proof. (i) Let χ1, . . . , χl be a list of the characters of the irreducibleG-modules. By Definition 13.25, Lemma 13.20(iii) and Theorem 13.19we have
o(G)〈χi, χj〉G =∑
g∈Gχi(g)χj(g) =
∑g∈G
χi(g)χj(g−1) = δijo(G).
(13.17)This shows that the set {χ1, . . . , χh(G)} is linearly independent inCF (G), and so
l ≤ dimCF (G) = h(G).
Suppose now l < dimCF (G), and let A denote the l × h(G) matrixwhose (i, j)th entry is χi(gj) where gj ∈ C`{j}, the j-th conjugacy classof G. By assumption
rank of A ≤ l < h(G),
that is the h(G) rows of A are linearly dependent; hence we can findcomplex numbers r1, . . . , rh(G) at least one of which is non-zero to satisfy

422 13 Representation and Character Theory∑h(G)
j=1rjχi(gj) = 0 for i = 1, . . . l.
Using these equations and Theorem 13.24 we obtain
0 =∑l
i=1
(∑h(G)
j=1rjχi(gj)
)χi(g
−1k )
=∑h(G)
j=1rj∑l
i=1χi(gj)χi(g
−1k )
=∑h(G)
j=1rjδjko(G)/o(C`{gk}) = rko(G)/o(C`{gk}).
Hence as o(G)/o(C`{gk}) 6= 0, we have rk = 0 for k = 1, . . . , h(G) whichcontradicts our assumption above. Therefore l = h(G), and (i) follows.
(ii) and (iii) follow directly from (i), and (iv) follows from the lastequation in (13.17) by putting g = e and i = j. 2
This result enables to make the following
Definition 13.27 (i) A character for G is called irreducible if, and only if,it is the character of an irreducible G-module.
(ii) The kernel ker θ of a representation θ of a group G with character χis called the kernel of χ, and it is denoted by kerχ.
(iii) The character table of G is the h(G) × h(G) matrix whose (i, j)thentry is χi(gj) where χi is the i-th irreducible character of G, and gj is arepresentative of the j-th conjugacy class of G where 1 ≤ i, j ≤ h(G).
Two points. (a) By Theorem 13.26 a group G has exactly h(G) irreduciblecharacters.
(b) The wording in (iii) suggests that there exists some kind of canonicalordering of the irreducible characters, but this is not so – they form an un-ordered set. The ordering of the rows of a character table is more or lessrandom, although it is usual to place the principal character at the top, andorder them by the size of their values for the neutral element.
Example. We shall construct the character table for S3, more examples aregiven in Section 14.1. The conjugacy classes of S3 are
{e}, {(1, 2), (1, 3), (2, 3)} and {(1, 2, 3), (1, 3, 2)}.
Hence as h(S3) = 3, the character table is 3× 3 and S3 has three irreduciblecharacters χi, i = 1, 2, 3 (by Theorem 13.20(i)). The first χ1 is the principalcharacter where χ1(g) = 1 for all g ∈ S3, and for the second we can take thecharacter we constructed in the Example on page 413. If we let the values ofχ3 be given by:
χ3(e) = r, χ3((1, 2)) = s, and χ3((1, 2, 3)) = t
where r, s, t ∈ C, then the character table can be written as follows.

13.4 Lifts and Normal Subgroups 423
g e 2-cycle 3-cycle
χ1(g) 1 1 1χ2(g) 2 0 −1χ3(g) r s t
Character Table for S3
To complete the table we need to calculate r, s and t. By Theorem 13.26(iv)we have, working on the first column, 12 + 22 + r2 = o(S3) = 6, hencer = ±1, but by Theorem 13.21(i) r > 0, and so r = 1. Now using the ColumnOrthogonality Relations (Theorem 13.24), working on the first and secondcolumns we obtain 1 · 1 + 2 · 0 + r · s = 1 + s = 0, and so s = −1, and workingon the first and third columns we obtain 1 · 1 + 2 · −1 + r · t = −1 + t, andso t = 1. The second character χ2 is called the minor permutation character,see Problem 13.16, and for the third character see Problem 13.18.
Finally in this section we give a useful condition for irreducibility:
Theorem 13.28 A character χ is irreducible if, and only if, 〈χ, χ〉G = 1.
Proof. By Theorem 13.26, if χ = n1χ1 + · · ·+nh(G)χh(G) where ni is anon-negative integer, and χi is a character of an irreducible G-module,for each i = 1, . . . , h(G), then by Theorem 13.21(iv)
〈χ, χ〉G =∑h(G)
i=1n2i .
So χ is irreducible, that is we have χ = χi for some i if, and only if,〈χ, χ〉G = 1. 2
Example. Using this condition we can see that the three characters givenin the example above are irreducible. By Theorems 3.6 and 5.19 the ordersof the centralisers of S3 are 6, 2 and 3, respectively. Hence for χ1 we have
12/6 + 12/2 + 12/3 = 1,
similarly for χ2 and χ3 we have
22/6 + 02/2 + (−1)2/3 = 1 and 12/6 + (−1)2/2 + 12/3 = 1,
that is these three characters are irreducible.
13.4 Lifts and Normal Subgroups
In this, the last of the theoretical sections, we give some further easilydeveloped character properties. Each of the main elementary group construc-tions – subgroups and extensions, factor groups and direct products – provideimportant developments in character theory. We shall mainly be concernedwith properties associated with factor groups, the so-called lifts, and someproducts as these are sufficient for the material to be presented in Chapter

424 13 Representation and Character Theory
14. We shall see that given a character of a factor group G/K, we can almostimmediately write down a character for G, and irreducibility is preserved. Weshall also be able to determine the linear characters of a group, that is thosewith degree 1. For further properties the reader should consult the referencesquoted in the introduction to this chapter.
We begin with the basic facts about lifts. First we have
Lemma 13.29 Suppose K is a normal subgroup of G, and χ is a characterof G/K. Let the class function χ on G be defined by
χ(g) = χ(gK) for g ∈ G.
Then χ is a character for G, and it has the same degree as χ.
Proof. Let σ : G/K → GLn be a representation (homomorphism)of G/K with character χ. Also let θ be the natural homomorphism(Definition 4.13) mapping G into G/K. The composition θσ : G →G/K → GLn is a homomorphism, and so it is also a representation ofG. Its character χ∗ satisfies
χ∗(g) = tr(gθσ) = tr((gK)σ) = χ(gK) = χ(g) for all g ∈ G,
and so χ∗ = χ. Further χ(K) = χ(e), hence χ and χ have the samedegree by Lemma 13.20. 2
Definition 13.30 The character χ of G given in Lemma 13.29 is calledthe lift to G of the character χ of G/K.
The next result shows the close relationship between a character χ andits lift χ.
Theorem 13.31 Suppose K / G.
(i) There is a one-to-one correspondence between the characters of G/K andthe characters χ of G which satisfy K ≤ ker χ.
(ii) In the correspondence given in (i) an irreducible character of G/K cor-responds to an irreducible character of G which contains K in its kernel.
Proof. (i) Let χ be a character of G/K and let χ be its lift to G. Wehave χ(K) = χ(e) and, if k ∈ K, and so kK = K, then
χ(k) = χ(kK) = χ(K) = χ(e).
Hence K ≤ ker χ. Conversely, let χ be a character of G with K ≤ ker χ.Further, let σ be the representation of G corresponding to χ whereχ(e) = n. If g1, g2 ∈ K and g1K = g2K, then g−12 g1 ∈ K and so(g−12 g1)σ = In which gives g1σ = g2σ. Hence if we define σ by
(gK)σ = gσ for g ∈ G,
it is well-defined. Further

13.4 Lifts and Normal Subgroups 425
((gK)(hK))σ = (ghK)σ = ghσ = gσhσ = (gK)σ(hK)σ
for g, h ∈ G. Now if χ is the character of σ, a representation of G/K,we have χ(gK) = χ(g) for all g ∈ G, hence χ is the lift of χ to G. Thisestablishes the one-to-one correspondence.
(ii) Irreducibility. If W is a subspace of the vector space Cn, we have
w(gχ) ∈W for w ∈W if and only if w(gK)σ ∈W for w ∈W.
This shows that W is a G-submodule of Cn if, and only if, W is a G/K-submodule of Cn. Hence σ is irreducible if, and only if, σ is irreducible,and so the same holds for the characters. 2
Example. The group E was described on pages 177 to 183. It has a normalsubgroup J = 〈a2〉/ E, and o(J) = 2. The character χ2 of J satisfies χ2(e) =1, χ2(a2) = −1. This character lifts to E as follows: Those conjugacy classeswhich involve even powers of a lift to 1, and those involving odd powers liftto −1; see the character table (second row) on page 457.
Normal Subgroups
As we have commented several times before, given a group G it is importantto be able to construct its normal subgroups. We show now that we can usethe character table for G to do this easily. For a character χ of G we have
kerχ = {g ∈ G : χ(g) = χ(e)} / G,
see Definition 13.27. Also the intersection of several character kernels of Gforms a normal subgroup of G (Theorem 2.30). A vital fact in the theory isthe fact that the converse is also true as we show in the next result.
Theorem 13.32 Suppose K/G. There exist irreducible characters χ1, . . . , χrof G with the property
K =⋂r
i=1kerχi.
Proof. We note first that if g ∈ kerχ for all irreducible characters χ,then χ(g) = χ(e) for all χ, and so g = e by Problem 13.17. Now supposeρ1, . . . , ρs is a list of the irreducible characters of G/K, then⋂s
i=1ker ρi = {K}
the neutral element of G/K. For 1 ≤ j ≤ s let χij be the lift to G ofthe character ρj . If g ∈ kerχij then
ρj(K) = χij (e) = χij (g) = ρj(gK),
and so gK ∈ ker ρj . Hence if g ∈⋂sj=1 kerχij , then gK ∈
⋂sj=1 kerχij =
{K} which implies that g ∈ K. This gives the result. 2

426 13 Representation and Character Theory
The reader should check that in the case G/ G the corresponding intersectiononly contains the principal character.
Corollary 13.33 A group G is simple if, and only if,
χ(g) 6= χ(e)
for all g ∈ G where g 6= e, and all non-principal irreducible characters χ.
Proof. If χ is irreducible and χ(g) = χ(e) for some g 6= e, then g ∈ kerχby definition and kerχ 6= 〈e〉. Also if σ is the representation associatedwith χ, then kerσ = kerχ and kerσ 6= G as χ is non-principal andirreducible. Hence G is not simple. Conversely if K/ G and K is properand non-neutral, then by Theorem 13.32, K is the intersection of somecharacter kernels, the result follows. 2
For an example see the character table for A5 on page 439.
Linear Characters
We begin with
Definition 13.34 A character is called linear if it has degree 1.
Two facts follow immediately if χ is a linear character for G.
(a) χ is a representation (homomorphism) of G by definition.
(b) χ(e) = 1 by Theorem 13.21(i).
When constructing a character table for a group G it is best to find thelinear characters first, and usually this is straightforward as the followingresult shows.
Theorem 13.35 (i) If χ is a linear character, then G′ ≤ kerχ.
(ii) Each linear character of G is the lift of an irreducible character of G/G′.
(iii) If G has t linear characters, then t | o(G).
Proof. (i) By (a) above we have, for g, h ∈ G,
χ(g−1h−1gh) = χ(g−1)χ(h−1)χ(g)χ(h) = 1,
as χ is a homomorphism in this case, and so G′ ≤ kerχ.
(ii) Let t = o(G/G′). As G/G′ is Abelian (Problem 4.6), its irre-ducible characters all have degree 1 (Theorem 13.11). Suppose they areχ1, . . . , χt, and their lifts to G are χ1, . . . , χt. By Lemma 13.20 they arealso linear, and G′ ≤ kerχi for i = 1, . . . , t. This gives the result.
(iii) This follows from (ii) by Lagrange’s Theorem (Theorem 2.27). 2
Example. Again we consider the group E (as in the example opposite). HereE/E′ ' C2×C2, and so by Theorem 13.35, E has four linear characters, thelifts of the four (linear) characters of C2 × C2; see pages 177ff, 435 and 457

13.4 Lifts and Normal Subgroups 427
As noted earlier we shall not discuss general character products (theyare defined using so-called ‘tensor products’, see the references quoted at thebeginning of this chapter), but products where one factor is linear can bedealt with easily and are useful.
Theorem 13.36 Suppose χ and ψ are characters of a group G and ψ islinear. If we define χψ by
χψ(g) = χ(g)ψ(g) for g ∈ G,
then χψ is a character of G, and χ is irreducible if, and only if, χψ is alsoirreducible.
Proof. Let σ be a representation of G with character χ, and define σψby
g(σψ) = ψ(g)(gσ) for g ∈ G,that is g(σψ) is the square matrix gσ multiplied by the complex numberψ(g). Both σ and ψ are homomorphisms, and so σψ is also a homomor-phism, and the trace of the matrix g(σψ) is given by
tr(g(σψ)) = ψ(g) · tr (gσ) = ψ(g)χ(g).
Therefore σψ is a representation of G with character χψ.
For the second part note that ψ(g) is a root of unity, and so
ψ(g)ψ(g) = 1, and hence
〈χψ, χψ〉G = (1/o(G))∑
g∈Gχ(g)ψ(g)χ(g)ψ(g)
= (1/o(G))∑
g∈Gχ(g)χ(g) = 〈χ, χ〉G.
Therefore 〈χψ, χψ〉G = 1 if, and only if, 〈χ, χ〉G = 1, and the theoremfollows by Theorem 13.28. 2
Example. Let G = S4 with conjugacy classes: {e}, 2-cycles, 3-cycles, 2-cycles× 2-cycles, and 4-cycles. By Problem 13.16 the minor permutation characterfor this group has values {3, 1, 0,−1,−1}, and by Problem 13.18 a linearcharacter (using even and odd permutations) has values {1,−1, 1, 1,−1}. SoTheorem 13.36 provides another character with values {3,−1, 0,−1, 1} whichcan easily be checked to be irreducible using Theorem 13.28.
Summary of Character Properties
We end this chapter with a resume of the basic character properties. Supposewe are given a group G with class number h(G). We always work over thecomplex field C.
(a) There are h(G) irreducible representations θ1, . . . , θh(G) of G.
(b) To each representation θ we associate a character χ, its values arethe traces of the corresponding matrices used in this representation.

428 13 Representation and Character Theory
(c) By (a) there are h(G) irreducible characters χ1, . . . , χh(G), theirvalues are sums of roots of unity.
(d) A character is a class function, and so is constant on a conjugacyclass of G.
(e) An Abelian group of order n has n irreducible characters all of whichhave degree 1.
(f) Column Orthogonal Relations: The sum∑h(G)r=1 χr(g)χr(h
−1) equalszero if h 6∈ C`{g}, and equals o(CG(g)) if h ∈ C`{g}.(g) We associate with G a square h(G) × h(G) array, or matrix, itscharacter table. The (i, j)th entry is χi(gj) where gj is a representativeof the j-th conjugacy class of G, and χi is the ith irreducible charac-ter. (Note that the order in which the characters and/or the conjugacyclasses are presented is more or less arbitrary.)
(h) Irreducible characters of a factor group G/K can be lifted to irre-ducible characters of G.
(i) The linear characters of G are the lifts of the characters of G/G′.
(j) The normal subgroups of G are determined by its character table.
Note that different groups can have identical character tables, for examplewith D4 and Q2, see page 436 and Problem 14.4.
13.5 Problems 13
Problem 13.1 (i) Fill in the details in Example (a) on page 406.
(ii) Show that projections are G-homomorphisms.
(iii) Let C2 = 〈a : a2 = e〉. Show that the map ψ of the regular moduleCC2 to itself defined by
(c1e+ c2a)ψ = (c1 − c2)(e− a) for c1, c2 ∈ C,
is a C2-homomorphism, and deduce ψ2 = 2ψ.
Problem 13.2 (i) Let C3 = 〈a : a3 = e〉 and B =(−1 −1
1 0
), and define
θ : C3 → GL2 by: arθ = Br for r = 0, 1, 2. Show that this defines a represen-tation of the group C3.
(ii) Let V be the 2-dimensional C3-module with basis {v1, v2} where
v1a = −v1 − v2 and v2a = v1.
Use (i) to show that this defines a C3-module. Is it irreducible?
Problem 13.3 Continuing the previous problem, let B denote the V -basis{v1, v2}, and let B′ denote the basis {u1, u2} where u1 = v1 and u2 = 2v1−v2.Show that

13.5 Problems 13 429
(e;B′) = I2, (a;B′) =
(1 −13 −2
), (a2;B′) =
(−2 1−3 1
),
and find a 2× 2 matrix C to satisfy (g;B) = C−1(g;B′)C for all g ∈ C3.
Problem 13.4 � (i) Suppose V is a non-zero G-module, and every G-homomorphism mapping V to itself is a scalar multiple of the map 1V . Showthat V is irreducible. This is of course the converse of Schur’s Lemma (The-orem 13.10), and it can be derived using Maschke’s Theorem.
(ii) Suppose φ : G → GLn is a representation of G. Show that φ isirreducible if, and only if, all matrices C which satisfy
(gφ)C = C(gφ) for all g ∈ G
have the form C = cIn for some c ∈ C.
(iii) Give an example of a groupG, aG-module V , and aG-homomorphismϕ : V → V with the property V 6= kerϕ⊕ im ϕ.
Problem 13.5 Suppose Dn = 〈a, b | an = b2 = (ab)2 = e〉 is the nthdihedral group.
(i) Let θ1 be given by θ1(a) = 1, θ1(b) = −1. Show that θ1 is a represen-tation of Dn of degree 1.
(ii) Give an example of a faithful representation of D4 with degree 3.
(iii) Define the 2× 2 matrices A,B,C and D by
A =
(eiπ/3 0
0 e−iπ/3
), B =
(0 11 0
),
C =
(1/2
√3/2
−√
3/2 1/2
), D =
(1 00 −1
).
Secondly, define the functions φi : D6 → GL2, i = 1, . . . , 4, by
φ1 : arbs 7→ ArBs, φ2 : arbs 7→ A3r(−B)s,
φ3 ; arbs 7→ (−A)rBs, φ4 : arbs 7→ CrDs,
where 0 ≤ r < 6 and 0 ≤ s < 2. Show that each φi is a representation of D6,and determine which are faithful and which are equivalent.
(iv) Show that there is a representation σ of D4 with the properties
aσ =
(−7 10−5 7
), bσ =
(−5 6−4 5
).
Calculate all matrices A which satisfy A(gσ) = (gσ)A for all g ∈ D4, anddetermine whether σ is irreducible; see Problem 13.4(ii). Secondly do thesame calculation for the representation τ where aτ =
(5 −64 −5
)and bτ =
(−5 6−4 5
).
430 13 Representation and Character Theory
Problem 13.6 � This problem concerns the entity Z(CG) which wasdefined on page 417.
(i) Show that if K / G, then∑k∈K k ∈ Z(CG).
(ii) Suppose V is an irreducible G-module, and h ∈ Z(CG). Using Schur’sLemma (Theorem 13.10) prove that there exists c ∈ C with the property
vh = cv for all v ∈ V.
(iii) If there exists a faithful irreducible G-module, deduce Z(G) is cyclic.
(iv) Use (iii) to give an example of a group G with no faithful irreducibleG-module. (Hint. One example has order 4.)
(v) SupposeG is finite and all of its irreducibleG-modules have dimension1. Show that G is Abelian. (Hint. Use Theorem 13.14.)
Problem 13.7 � Prove the trace properties (a) to (d) given on page 412,and give an example to show that trAB need not equal trA trB.
Problem 13.8 � (i) Show that if χ is a faithful irreducible character ofa group G, then
Z(G) = {g ∈ G : |χ(G)| = χ(e)}where the vertical bars denote the complex absolute value function.
(ii) Prove that if a ∈ G and a 6= e, then χ(a) 6= χ(e) for at least oneirreducible character of G.
(iii) If χ1, . . . , χr is a list of the irreducible characters of a group G, showthat
Z(G) = {g ∈ G :∑r
i=1χi(g)χi(g) = o(G)}.
Problem 13.9 Suppose G is finite and σ : G → GL2 is a 2-dimensionalrepresentation. Suppose further there exist g, h ∈ G with the property: gσand hσ do not commute. Use a consequence of Maschke’s Theorem (Theorem13.12) to show that σ is irreducible.
Problem 13.10 Show that 〈ξ, χ〉G = χ(e) where ξ is the regular characterfor G and χ is an arbitrary character for G.
Problem 13.11 In this problem you should use the character table forS3 given on page 422. This group has three conjugacy classes, they are{e}, {(1, 2), (1, 3), (2, 3)} and {(1, 2, 3), (1, 3, 2)}. Define the following classfunctions on S3 with the values given as follows: τ1 : {1, 0, 0}, τ2 : {0, 1, 0}, τ3 :{0, 0, 1}, τ4 : {15,−5, 9} and τ5 : {15,−5,−6}. Express each of these classfunctions as linear combinations of the irreducible characters of S3, and de-termine which form characters of the group S3.
Problem 13.12 Suppose CG is the matrix formed by the entries of thecharacter table for G.

13.5 Problems 13 431
(i) Show that detCG is nonzero, and it takes either a real, or a pureimaginary, value.
(ii) If ci is a representative of the ith conjugacy class of G, prove that
(detCG)2 =∏r
i=1o(CG(ci)).
(iii) Find det(CG) when G is (a) C3, (b) C2 × C2, and (c) A5. In eachcase what determines the sign?
Problem 13.13 Using Problem 3.6 find the character table for the groupF7,3. (Hint. This group has a cyclic subgroup of order 7 and a cyclic factorgroup of order 3.)
Problem 13.14 A group of order 12 has six conjugacy classes with classrepresentatives e, g2, . . . , g6, and irreducible characters χ1, χ2 which take thevalues 1,−1, i, 1,−1,−i and 2, 2, 0,−1,−1, 0, respectively. Using Theorem13.36 complete the character table for the group in question.
Problem 13.15 A groupG of order 8 has five conjugacy classes with orders1, 1, 2, 2, 2 and class representatives R = {e, g2, . . . , g5}, respectively. Three ofthe irreducible characters of G take the following values on R: 1, 1, 1,−1,−1;1, 1,−1, 1,−1: and 1, 1,−1,−1, 1. Find the remaining two irreducible charac-ters.
Problem 13.16 � (i) Let G ≤ Sn, let V be an n-dimensional vector spacedefined over C with basis {v1, . . . , vn}, and for g ∈ G define
vig = vig for g ∈ G.
Using linearity show that this procedure defines a G-module. You should referto Example (d) on page 404.
(ii) Let ρ be the character of the G-module defined in (i). Show that, ifg ∈ G,
ρ(g) = o({i : 1 ≤ i ≤ n and ig = i}).The character ρ is called the permutation charcater of G
(iii) Define ξ : G→ Z by
ξ(g) = ρ(g)− 1 for g ∈ G.
Show that ξ is a character of G which we call the minor permutation characterof G. (Hint. See Example (c) on page 403.)
(iv) Calculate the minor permutation characters for the groups A4 andS5, and determine if either is irreducible?
Problem 13.17 (i) Show that the irreducible characters of a group Gform a basis of the vector space of all class functions CF (G) of G. (Hint. UseTheorem 13.26.)

432 13 Representation and Character Theory
(ii) Suppose τ is a class function on G. Using (i) prove that
τ =∑h(G)
i=1ciχi
where ci is a complex number given by ci = 〈τ, χi〉G for i = 1, . . . , h(G).
(iii) Let g, h ∈ G. Show that h is conjugate to g in G if, and only if,χ(h) = χ(g) for all characters χ of G. (Hint. Use (ii).)
(iv) Deduce g−1 is conjugate to g in G if, and only if, χ(g) is real for allcharacters χ of G.
Problem 13.18 � (i) For the group Sn define ξ by: ξ(σ) = 1 if σ is even,and ξ(σ) = −1 if σ is odd, where in each case σ ∈ Sn. Show that ξ is anirreducible character of Sn.
(ii) Show that if n > 1 then Sn has exactly two linear characters, and listthem.
(iii) For n > 2 how many linear characters does An have?
(iv) If a non-Abelian group G has only one linear character, does it nec-essarily follow that G is simple?
Problem 13.19 (Restriction to a subgroup) Suppose H ≤ G and χ is acharacter of G.
(i) Let χ ↓ H be the function χ with its domain restricted to H. Showthat χ ↓ H is a character of H, it is called a restricted character.
(ii) Using the character table for S4 given on page 455 construct fivecharacters for S3 using restriction, and determine which are irreducible.
(iii) Suppose χ is irreducible, and φ1, . . . , φr is a list of the irreduciblecharacters for H. Show that
χ ↓ H = s1φ1 + · · ·+ srφr
where each si is a non-negative integer. Further show that∑r
i=1s2i ≤ [G : H].
(Hint. Use Theorem 13.26.)
(iv) Using (iii), express each restricted character constructed in (ii) as asum of irreducible characters for S3, and so obtain again the character tablefor S3.
(v) Do the same calculations as in (ii) and (iv) for the alternating groupsA5 (see page 439 for its character table) and A4. Do you obtain the completecharacter table for A4 in this way?
Details concerning the last three problems given below which are of amore challenging nature can be found in Huppert (1998).

13.5 Problems 13 433
Problem 13.20? Suppose o(G) is odd, and 1G, χ2, . . . , χr is a list of theirreducible characters of the group G where h(G) is the class number of G.
(i) Prove that χi 6= χi for i = 2, . . . , r. (Hint. Use orthogonality and thefact that 1/2 is not an algebraic integer.)
(ii) Show that h(G) ≡ o(G) (mod 16), a result due to Burnside. (Hint.Pair off the non-principal characters and use orthogonality again.) What doesthis imply for groups of odd order less than 16?
Problem 13.21? A famous result of Frobenius and Schur states: If χ isan irreducible character of G, then
χ(e) | [G : Z(G)],
see Huppert (1998), page 68. Use this to show that if G is a non-Abeliansimple group, then χ(e) 6= 2 for all irreducible characters χ of G. (Hint.Assume the contrary, and so G has a faithful representation of degree 2, andnote that G = G′ in this case.) The result of Frobenius and Schur is notstrictly necessary here, but this problem has given us the opportunity tointroduce this important result to you, the reader.
Problem 13.22? One of Burnside’s many results states that if χ is anirreducible character of a finite group G and χ(e) > 1, then χ(G) = 0 forsome g ∈ G. Investigate what is needed to prove this result. Also check thatit is correct for the character tables given in this chapter and the next.

Chapter 14
Character Tables, and Theorems of
Burnside and Frobenius
Representation and character theory has proved to be extremely useful in an-swering questions about finite groups. It is also widely used of other branchesof mathematics and beyond, see for example James and Liebeck (1993), Chap-ter 30. The solution of a number of the most important theorems in the sub-ject would not exist without it, for example it played a vital role in the proofof the Feit-Thompson Theorem and in CFSG. In this chapter we give threeapplications. First, using the theory developed in Chapter 13 we construct anumber of character tables, these include the tables for most groups of order12 or less, S4 (in the problem section), and A5. A number of properties of agroup can be ‘read off’ its character table once it has been constructed, forexample its normal subgroup structure; see Theorem 13.32. Also these tablescan be used to determine nilpotency and/or solubility, but note there existpairs of groups with identical character tables and distinct second derivedsubgroups (Hubbert (1998), page 44). It is a convenient fact that many ofthe more ‘interesting’ larger groups have relatively small character tables (be-cause their element conjugacy classes are large), so for example the charactertable for M11 (with order 7920) is only 10× 10.
Secondly, we give a proof of Burnside’s prqs-theorem using charactertheory. This was probably the first major success of the theory publishedin 1903. It enables us to deduce that if only two distinct primes divide theorder of a group, then it is soluble. Non-character-theoretic proofs have beenfound recently by H. Bender but they are much longer, see for example Issacs(2008), Chapter 7.
Our final application is to the so-called Frobenius theory. We noted sev-eral times in the book that a result which asserts the existence of a normalsubgroup is important and, under certain conditions, this is exactly whatFrobenius’s result does. It was first developed in terms of permutation groups,nowadays a more direct approach is used and we shall follow this here. Wegive four applications, the last allows us to define the Suzuki groups firstdiscussed in Chapter 12.
433

434 14 Character Tables, and Theorems of Burnside and Frobenius
14.1 Character Tables
As noted on the previous page in this section we construct the charactertables for a number of familiar groups of small order, and we shall begin withthe cyclic groups.
Character Tables for Cyclic Groups
In Theorem 13.11 we showed that all irreducible representations of cyclicgroups have degree 1, and so all irreducible characters of cyclic groups havedegree 1. Also in an Abelian group each conjugacy class has order one. Hencea cyclic group of order n has n irreducible characters. Suppose Cn ' 〈a〉 andan = e. Let ω be a primitive n-th root of unity, so ωn = 1, and no smallerpositive power satisfies this equation. Define a series of characters χr by
χr(ak) = ωrk for k = 0, 1, . . . , n− 1,
where r is some fixed integer in the range 0 ≤ r < n. Hence we obtainn irreducible characters for Cn, that is one for each r in the given range.As an example we write down the character table for C3 as follows, hereω = (−1 +
√−3)/2.
g e a a2
χ1 1 1 1χ2 1 ω ω2
χ3 1 ω2 ω
Table 1 Character Table for C3
If we take ω = (−1−√
3)/2, then we obtain the same table except that thesecond and third rows are interchanged. Similar tables can be constructed forall cyclic groups, the reader should write down the tables for C2 and C4, seeProblem 14.1. We shall not give the tables for the remaining Abelian groupsin our chosen range. Roughly speaking the character table for Cn × Cm canbe constructed by ‘multiplying together’ the tables for Cn and Cm.1 As anexample we shall construct the table for C2×C2. The method we use is non-standard, that is we do not obtain the table by ‘multiplying together’ twocopies of the table for C2.
Let C2 × C2 ' 〈a, b | a2 = b2 = e, ab = ba〉 = G. This group is Abelianand so all of its irreducible characters have degree 1, and there are four ofthem. Also 〈a〉 / G, so the two irreducible characters for C2 can be lifted,see Theorem 13.31, to characters of G. Hence this character table for G hasthe following form where we still need to justify the entries in the third and
1 This procedure involves the use of the ‘tensor product’, see the references quoted in theIntroduction to Chapter 13.

14.1 Character Tables 435
fourth rows. (Note that this table contains three copies of the array(1 11 −1
)‘multiplied’ by 1, and one copy ‘multiplied’ by −1 corresponding to the entriesin the table for C2.)
g e a b ab
χ1 1 1 1 1χ2 1 −1 1 −1χ3 1 1 −1 −1χ4 1 −1 −1 1
Table 2 Character Table for C2 × C2
The first column is correct as each character has degree 1 (see Lemma13.20(i)), that is χi(e) = 1 for i = 1, . . . , 4. To justify the remaining entriesin the third and fourth rows we first rewrite them as
χ3 : 1, r1, r2, r3 and χ4 : 1, s1, s2, s3.
Then using the Column Orthogonality Relations (Theorem 13.24) on thesecond column, and then on the first and second columns, we obtain
12 + (−1)2 + r21 + s21 = 4 = o(C2×C2) and 1 · 1 + 1 ·−1 + 1 · r1 + 1 · s1 = 0,
so r21 + s21 = 2 and r1 = −s1, which in turn give r1 = ±1 and s1 = ∓1. Atthis stage in the calculation there is a choice of sign, so we choose r1 = 1 ands1 = −1. If we make the other choice then rows 3 and 4 in the table wouldbe interchanged. Exactly similar calculations using Theorem 13.24 again willgive the remaining entries; see Problem 14.2.
Character Tables for Dihedral Groups
We shall construct the character tables for the groups Dm. In Problem 14.3we give the case when m is odd, and here we treat the case when m is even.Let n = m/2 throughout, so m = 2n. The dihedral group D2n (of order 4n)has a presentation
D2n ' 〈a, b | a2n = b2 = e, bab = a2n−1〉.
Our first step is to list the conjugacy classes, there are n+ 3 of them:
{e}, {an}, {a, a2n−1}, {a2, a2n−2}, . . . , {an−1, an+1},
{b, a2b, . . . , a2n−2b}, {ab, a3b, . . . , a2n−1b}. (14.1)
In each case we take the first entry of the sets in (14.1) as the conjugacyclass representatives. The orders of these classes are 1, 1, 2, 2, . . . , 2, n, n, re-spectively, with n− 1 of order two.

436 14 Character Tables, and Theorems of Burnside and Frobenius
We can construct several degree 2 representations (over C) of this groupas follows. Let σn = eπi/n, and let Ar and B be given by
Ar =
(σrn 00 σ2n−r
n
)and B =
(0 11 0
).
Then for each fixed r = 1, 2, . . . , n− 1 we have
A2nr = B2 = I2 and BArB = A2n−1
r ,
that is 〈Ar, B〉 is a matrix representation the group D2n over C for r in therange 1, . . . , n− 1. The question arises: Are these representations irreducible(Definition 13.9)? The answer is yes provided r is in the given range, and thisfollows from Problem 13.5. Hence by taking traces we obtain n−1 irreduciblecharacters for our group, and they all have degree 2; see the table below. Weneed to find the remaining four. We have 〈a2〉 / D2n, and
D2n/〈a2〉 = {〈a2〉, a〈a2〉, b〈a2〉, ab〈a2〉}.
This factor group is isomorphic to C2 × C2 whose character table was givenin Table 2 above. Hence the four remaining irreducible characters can beconstructed as lifts to D2n of the characters in Table 2; see Theorem 13.31.If a conjugacy class in (14.1) involves even powers of a, that is a member ofthe collection
e, {a2, a2n−2}, {a4, a2n−4}, . . . ,then we lift the first column of Table 2 to the columns for the conjugacyclasses in this collection. Similarly if a conjugacy class involves odd powersof a, we lift the second column of Table 2 to the columns for the odd powerconjugacy classes. Note that the second class in (14.1) will lift to the firstcolumn if n is even, and to the second if n is odd. Further for the penultimateclass in (14.1) we lift the third column in Table 2 to the last but one columnin Table 3, and for the last class we lift the last column in Table 2 to the lastcolumn of Table 3. These procedures provide n + 3 irreducible characters,and so we obtain the character table for D2n when n > 1 as given below.
g e an a . . . an−1 b abo(CD2n
(g)) 4n 4n 2n . . . 2n 4 4
χ1 1 1 1 . . . 1 1 1χ2 1 (−1)n −1 . . . (−1)n−1 1 −1χ3 1 1 1 . . . 1 −1 −1χ4 1 (−1)n −1 . . . (−1)n−1 −1 1χ5 2 −2 σn + σ2n−1
n . . . σn−1n + σn+1n 0 0
χ6 2 2 σ2n + σ2n−2
n . . . σn−2n + σn+2n 0 0
· · · · · · · · · · · · · · · · · · · · · · · ·χn+3 2 (−2)n σn−1n + σn+1
n . . . σn + σ2n−1n 0 0
Table 3 Character Table for D2n with order 4n

14.1 Character Tables 437
For non-Abelian groups it is usual to include the second row in Table 3giving the orders of the centralisers of the corresponding elements so that theColumn Orthogonality Relations can be readily applied. Note also that the(r + 4, s + 2)th entry in this table, for 1 ≤ r ≤ n − 1 and 1 ≤ s ≤ n − 1,is σrsn + σ−rsn where σ2n
n = 1. Reader: how many normal subgroups does thegroup have?
Character Table for A4
In Problem 3.3 we showed that A4, treated as a permutation group, has fourconjugacy classes with class representatives
e, (1, 2)(3, 4), (1, 2, 3), (1, 3, 2),
and orders 1, 3, 4, 4; respectively. Now A′4 ' C2 × C2, see Problem 3.10,and so the factor group A4/A
′4 ' C3. Hence A4 has three linear irreducible
characters, the lifts of the three irreducible characters of C3; see Table 1above and Theorem 13.31. Also the minor permutation character ξ for A4,see Problem 13.16, is irreducible. This follows from Theorem 13.28 and thesimple calculation
〈ξ, ξ〉A4= 32/12 + (−1)2/4 + 0/3 + 0/3 = 1.
Hence we can write down directly the character table for this group as
g e (1, 2)(3, 4) (1, 2, 3) (1, 3, 2)o(CA4
(g)) 12 4 3 3
χ1 1 1 1 1χ2 1 1 ω ω2
χ3 1 1 ω2 ωχ4 3 −1 0 0
Table 4 Character Table for A4
Here χ4 = ξ. As an exercise check that the Column Orthogonality Relationsapply in this example.
Character Table for Dicyclic Group Q3
The dicyclic group Q3 has the presentation 〈a, b | a3 = b2 = (ab)2〉; it has sixconjugacy classes with class representatives:
e, a3, a, a2, b, ab.
Their orders are 1, 1, 2, 2, 3, 3, respectively; see page 159. Hence Q3 has sixirreducible characters. Referring again to page 159 we see that 〈a2〉 / Q3 and

438 14 Character Tables, and Theorems of Burnside and Frobenius
o(〈a2〉) = 3, hence Q3/〈a2〉 ' C4 where this factor group has the elements〈a2〉, b〈a2〉, a〈a2〉 = b2〈a2〉 and ab〈a2〉 = b3〈a2〉.
By Theorem 13.31, as Q3/〈a2〉 is cyclic of order 4 we can immediatelywrite down four irreducible linear characters for Q3 as lifts of the correspond-ing characters for C4 given in Problem 14.1. Further, as 12 = 4 · 1 + 22 + 22
is the only solution in integers larger than one of an equation of the type12 = 4 + x2 + y2 · · · , by Theorem 13.26(iv) we see that the two remainingirreducible characters both have degree 2. Hence the character table for Q3
can be taken in the following form
g e a3 a a2 b abo(CQ3
(g)) 12 12 6 6 4 4
χ1 1 1 1 1 1 1χ2 1 −1 −1 1 i −iχ3 1 1 1 1 −1 −1χ4 1 −1 −1 1 −i iχ5 2 2 −1 −1 0 0χ6 2 −2 1 −1 0 0
Table 5 Character Table for Q3
where we need to justify the entries in the last two rows. The first four entriesof the first and fourth columns are lifts of the first column of the table forC4, the second and third are lifts of the third column for C4, the fifth is a liftof the second column for C4, and the sixth is a lift from the fourth columnfor C4. To establish rows 5 and 6 we first rewrite them as
χ5 : 2, r1, r2, r3, r4, r5 and χ6 : 2, s1, s2, s3, s4, s5.
Then using the Column Orthogonality Relations (Theorem 13.24) first onrow two, and then on rows one and two, we obtain
4 + r21 + s21 = 12 and 0 + 2r1 + 2s1 = 0
which imply that r1 = ±2 and s1 = ∓2. As these characters have the samedegree we can choose the signs so that r1 = 2 and s1 = −2. Using theorthogonality relations (Theorem 13.24) again now applied to the relevantcolumns we obtain the equations
2r2 + 2s2 = 0, 4 + 2r2 − 2s2 = 0,
2r3 − 2s3 = 0, 4 + 2r3 + 2s3 = 0,
2r4 + 2s4 = 0, 2r4 − 2s4 = 0,
2r5 + 2s5 = 0, 2r5 − 2s5 = 0,
and the values given in the table above follow easily. We can deduce from thetable that Q3 has three proper non-neutral normal subgroups, see pages 424and 425; reader list them.

14.1 Character Tables 439
Character Table for A5
As a final example we construct the character table for A5. Different con-structions of this table can be found in, for example, James and Liebeck(1993) and Huppert (1998). In some ways these are more natural comparedwith the construction given below, but they both use aspects of the theorythat we have not covered in Chapter 13. In Problem 3.3 we showed that A5,treated as a permutation group, has five conjugacy classes, and we can takethe following as class representatives:
e, (1, 2)(3, 4), (2, 4, 5), (1, 2, 3, 4, 5), (1, 3, 5, 2, 4).
Note that (1, 2, 3, 4, 5)(1, 2)(3, 4) = (2, 4, 5), all 3-cycles are conjugate in A5
(see the proof of Lemma 3.13), and (1, 2, 3, 4, 5)2 = (1, 3, 5, 2, 4). By Theo-rem 13.26 this shows that A5 has five irreducible characters χi, i = 1, . . . , 5.We can write two down immediately: the principal character χ1, and theminor permutation character χ2, see the table below, and Problem 13.16.Reader: you need to check that this second character is irreducible. Furtherby Theorem 13.21, and as χ1(e) = 1 and χ2(e) = 4, we have
60 = o(A5) =∑5
i=1χ2i (e) = 17 +
∑5
i=3χ2i .
The only solution in integers ri larger than one of the equation 43 = r21 +r22 +r23 is r1 = r2 = 3 and r3 = 5 where some rearrangement of the suffixes may benecessary. This shows that two of the remaining three irreducible charactershave degree 3 and the last has degree 5, that is χ3(e) = χ4(e) = 3 andχ5(e) = 5. In Problem 3.27W we gave a 3-dimensional representation of A5
over C. By taking traces (see (ii) in the quoted problem) we can immediatelywrite down the two degree 3 irreducible characters. We obtain two irreduciblecharacters because there are two distinct primitive fifth roots of unity. Hencethe character table for A5 is given by
g e (1, 2)(3, 4) (2, 4, 5) (1, 2, 3, 4, 5) (1, 3, 5, 2, 4)o(CA5
(g)) 60 4 3 5 5
χ1 1 1 1 1 1χ2 4 0 1 −1 −1χ3 3 −1 0 (1 +
√5)/2 (1−
√5)/2
χ4 3 −1 0 (1−√
5)/2 (1 +√
5)/2χ5 5 1 −1 0 0
Table 6 Character Table for A5
To see that the last row of this table is correct we argue as follows. Rewritethis row as 5, r, s, t, u. Using Column Orthogonality (Theorem 13.24) we have3 + r2 = 4 (using column 2) and 5r − 5 = 0 (using columns 1 and 2), hencer = 1. Similarly we have 2 + s2 = 3 and 5 + 5s = 0, hence s = −1. We leavethe remaining two cases for the reader to evaluate. Note that, by Corollary13.33, this construction provides a new proof of the simplicity of A5 for using

440 14 Character Tables, and Theorems of Burnside and Frobenius
the table above we see immediately that the only proper normal subgroup ofA5 is 〈e〉, in each of the remaining rows the first entry is not repeated.
Further examples are given in the problem section, these include thecharacter tables for the three groups discussed in Chapter 8.
14.2 Burnside’s prqs-Theorem
We come now to one of the early successes of representation theory: Burn-side’s prqs-theorem first proved in 1903. In Theorem 6.5 we showed that,amongst other facts, all p-groups are soluble. Burnside’s result extends thisto show that every group whose order has at most two distinct prime factors issoluble. Note that p-groups satisfy the stronger condition of being nilpotent,but this does not hold in the prqs case; an example is S3. Also Burnside’sresult does not extend to three primes; the group A5 is an example.
The proof uses some of the character theory results that were provedin Chapter 13. It also uses some properties of the algebraic integers in anessential way as is shown in the next lemma, the basic facts are discussed inthe appendix to this chapter.
Lemma 14.1 (i) If χ is a character of G and g ∈ G, then χ(g) is analgebraic integer.
(ii) If χ is an irreducible character of G, g ∈ G and C`{g} is the conjugacyclass of G which contains g, then
o(C`{g})χ(g)/χ(e) is an algebraic integer.
Proof. (i) By Lemma 13.20, χ(g) is a sum of roots of unity. Clearly aroot of unity is an algebraic integer, and so (i) follows by Theorem B19(Appendix to this chapter).
(ii) By Lemma 13.23(ii), o(C`{g})χ(g)/χ(e) is an eigenvalue of a non-singular n× n matrix C with integer entries, and so it is a root of theequation
det(C − xIn) = 0.
But this is a monic polynomial equation in the variable x with integercoefficients. By definition its roots are algebraic integers, and so theresult follows. 2
The next lemma, which uses Lemma 13.20(iv), is essential for both ofBurnside’s results below.
Lemma 14.2 Suppose θ is an irreducible representation of G with char-acter χ, g ∈ G, and C`{g} is the corresponding conjugacy class of G. If(χ(e), o(C`{g})) = 1 then either
(i) |χ(g)| = χ(e), or (ii) χ(g) = 0.

14.2 Burnside’s prqs-Theorem 441
Proof. As (χ(e), o(C`{g})) = 1, using the Euclidean Algorithm (Theo-rem B2) we can find integers r and s to satisfy rχ(e) + s o(C`{g}) = 1,this gives, multiplying by χ(g)/χ(e),
rχ(g) + s o(C`{g})χ(g)/χ(e) = χ(g)/χ(e).
By Lemma 14.1, both χ(g) and o(C`{g})χ(g)/χ(e) are algebraic inte-gers, hence
χ(g)/χ(e) is an algebraic integer. (14.2)
By Lemmas 13.20(i), (ii) and (iv), χ(g) is a sum of roots of unity of theform:
χ(g) = w1 + · · ·+ wt and |χ(g)| ≤ χ(e), (14.3)
where t = χ(e). So either |χ(g)| = χ(e), that is (i) holds, or |χ(g)| <χ(e). This second possibility implies χ(g) = 0 as we show now. Using(14.2) let
f(x) = xn + r1xn−1 + · · ·+ rn where ri ∈ Z for i = 1, . . . , n
be the (unique) monic polynomial of minimal degree with root χ(g)/χ(e).As the conjugate of a root of unity is another root of unity, we have by(14.2), each conjugate of χ(g)/χ(e), that is each root of f(x) = 0, canbe written in the form
(w′1 + · · ·+ w′t)/t
where w′i is a root of unity for i = 1, . . . , t. Using the same procedureas in the proof of (14.3), it follows that the modulus of each of theseexpressions is less than or equal to 1. Hence if y denotes the product ofall of these moduli, then we have
0 ≤ y < 1 and y = ±rn ∈ Z,
using standard monic polynomial properties. The only possible conclu-sion from these facts is: y = 0, and then f(x) = x with a single root 0.The result follows. 2
The first of Burnside’s theorems is as follows. Conjugacy classes were de-fined in Chapter 5 where we proved that the order of a conjugacy class alwaysdivides the order of the corresponding group (Theorem 5.19). Burnside’s re-sult shows that if the order of a conjugacy class is a power of a prime, thenthe group cannot be simple provided it is not cyclic. The proof uses charac-ter theory and some properties of algebraic integers. Also, the prqs-theoremfollows directly from it.
Theorem 14.3 Suppose C` is a conjugacy class of G not equal to {e}. Iffor some prime p and non-negative integer n we have o(C`) = pn, then Gcannot be a non-Abelian simple group.
Proof. Suppose G is a non-Abelian simple group. Let C` = C`{g} ={a−1ga : a ∈ G} where g 6= e. If o(C`) = 1 then g ∈ Z(G), and so

442 14 Character Tables, and Theorems of Burnside and Frobenius
Z(G) 6= 〈e〉. If Z(G) = G then G is Abelian, otherwise Z(G) is a non-neutral proper normal subgroup of G, and so G is not simple. Both ofthese cases are ruled out by our supposition, and so we may assumethat o(C`) = pn > 1.
Let χ1, . . . , χh(G) be a list of the irreducible characters of G withχ1(g) = 1 for all g ∈ G. We make the following hypothesis:
For some i > 1 and g ∈ G, χi(g) 6= 0 and p - χi(e). (14.4)
The theorem’s conditions give (o(C`), χi(e)) = 1 and so, by Lemma 14.2,|χ(g)| = χ(e). If θi is the representation of degree ni of G correspondingto the character χi, and r ∈ C, then by Schur’s Lemma (Theorem 13.10)
gθi = rIni.
There are two possibilities:
(a) 〈e〉 < kerχi / G and kerχi 6= G,
(b) θi is faithful.
If (a) holds then G is not simple, and if (b) holds then g ∈ Z(G) whereg 6= e, and again G is not simple as we argued above. Therefore (14.4)is false and so we may assume that χi(g) = 0 for all i > 1 subject tothe condition p - χi(e). But by Theorem 13.24 we have
0 = 1 +∑h(G)
i=2χi(e)χi(g) = 1 + p ·
∑h(G)
i=2
(χi(e)/p
)χi(g).
Each term in the second sum is either 0 (when χi(g) = 0), or is aninteger multiple of χi(g) (by the above argument p |χi(e) when χi(g) 6=0). Rewriting we have∑h(G)
i=2
(χi(e)/p
)χi(g) = −1/p.
But this is impossible because the left-hand side is a sum of integer mul-tiples of algebraic integers, and so is itself an algebraic integer, whereas−1/p is not an algebraic integer. Hence our original supposition (G issimple) is false and so the result follows. 2
Using this we can now deduce Burnside’s famous 2-prime result.
Theorem 14.4 (Burnside’s prqs-Theorem) If o(G) = prqs where p andq are primes, and r and s are non-negative integers, then G is soluble.
Proof. If G is Abelian, or p = q, or either r or s equals 0, then the resultfollows from Theorem 11.6 (in each of these cases the group is nilpotent).Also, by Problem 11.6, it is sufficient to show that G is not simple andnon-Abelian. Let P be a Sylow p-subgroup of G, and let g ∈ Z(P ). ByLemma 5.21 we may assume that g 6= e. This gives CG(g) ≥ P , as gcommutes with every element of P . So by Theorem 5.19

14.2 Burnside’s prqs-Theorem 443
o(C`{g}) = [G : CG(g)] = qt
for some integer t with 0 ≤ t ≤ r. If t = 0 then g ∈ Z(G), and so G isnot simple, and if t > 0 then Theorem 14.3 applies, and again G is notsimple. 2
Some comments and extensions of Burnside’s results
(a) Although Burnside’s theorems are important applications of characterand representation theory, attempts have been made to give purely group-theoretic derivations. Bender has given a proof of the prqs-theorem whichdoes not use character theory, it is long and quite difficult; versions are givenin Huppert and Blackburn III (1982b) and Issacs (2008). No non-charactertheory proof of the first Burnside Theorem (Theorem 14.3) is known.
(b) Burnside’s first theorem has been extended by Kazarin to:
If g ∈ G, g 6= e and o(C`{g}) = pr where p is prime and r > 0, then theset C`{g} generates a soluble normal subgroup of G.
For a proof see Huppert (1998).
(c) Burnside’s prqs-theorem is best possible in the sense that there exist(infinitely many) non-soluble groups whose orders have three distinct primefactors. There are eight simple groups (up to isomorphism) in this class, seeChapter 12 and the Atlas (1985). Further SL2(5), S5 and S6 are examples ofnon-soluble non-simple groups whose orders have three distinct prime factors(that is 2, 3 and 5), and so also a direct (or semi-direct) product of anyof these groups with a 2-, 3- or 5-group (or with themselves!) would formanother non-soluble non-simple group with order having three distinct primefactors.
(d) With the completion of the proofs of Burnside’s theorems we have alsocompleted the proof of Hall’s Second Theorem (Theorem 11.14), the two-prime case of Hall’s theorem follows directly from the Sylow theory (Theorem11.4).
(e) As in (b) attempts have been made to establish some properties of thenormal subgroup(s) postulated by the prqs-theorem. An important one is asfollows. Suppose o(G) = prqs and pr > qs, then G has Sylow p-subgroup(s)Pi. If there is more than one then we can define the p-radical Op(G) by
Op(G) = ∩i Pi,
where the intersection runs over all Sylow p-subgroups of G, and it forms anormal subgroup of G; see Problem 6.9(vi). The question arises:
When is Op(G) 6= 〈e〉?
Burnside, with some later corrections, showed that this holds in most cases.The exceptions make use of some primes which arise in elementary number

444 14 Character Tables, and Theorems of Burnside and Frobenius
theory and are somewhat surprising. (We need to consider cases when the
integer o(P ) (= pr) divides o(GLs(q)) (=∏s−1i=0 (qs − qi)).) It can be shown
that Op(G) > 〈e〉 if pr > qs except possibly in one of the following threecases:
(i) p = 2 and q = 2n + 1 where this number is a ‘Fermat’ prime (andso n is a power of 2), only five of which are known at the present time;they are 3, 5, 17, 257 and 65537.
(ii) p = 2m − 1 and q = 2. Here p must be a ‘Mersenne’ prime (and som is also prime), at the present time 40 are known.
(iii) p = 2 and q = 7. In this case an example has been given for a groupwith order 223 · 78.
Further details can be found in Burnside (1904), Rose (1978), Huppert (1998),and Problem 14.13.
14.3 Frobenius Groups
Frobenius’s theorem gives a method for constructing certain groups withdesignated normal subgroups and, as we have seen previously, a result thatpostulates the existence of normal subgroups is always of importance in thetheory. We begin by considering an easy example. Let G = S3 and H =〈(1, 2)〉 ≤ S3. We have (1, 3)(1, 2)(1, 3) = (2, 3) = (1, 3, 2)(1, 2)(1, 2, 3) and(2, 3)(1, 2)(2, 3) = (1, 2) = (1, 2, 3)(1, 2)(1, 3, 2) et cetera. These show that
H ∩ g−1Hg = 〈e〉 for all g ∈ G\H. (14.5)
Frobenius now defines a set (in fact a normal subgroup) K by
K = G \⋃
g∈Gg−1(H\〈e〉)g = S3 \ {(1, 2), (1, 3), (2, 3)}.
Clearly in this case
K = {e, (1, 2, 3), (1, 3, 2)} / S3,
and we do not need any deep theory to prove this. Frobenius’s theorem statesthat a similar construction can always be undertaken provided a conditionsimilar to (14.5) holds. We prove this result now making extensive use of thecharacter theory developed in Chapter 13. A ‘non-character’ theory proofexists (see Huppert 1998), but it only works if we assume that the Feit-Thompson Theorem (all odd order groups are soluble) has been established,but the proof (which is very difficult) of this result uses representation theoryin an essential way. Frobenius originally derived his theorem using permu-tation groups, we shall discuss this approach once we have proved the maintheorem. We begin with the following
Lemma 14.5 Suppose H ≤ G, H satisfies condition (14.5), h ∈ H andh 6= e. If g ∈ G and g−1hg ∈ H, then g ∈ H.

14.3 Frobenius Groups 445
Proof. As g−1hg ∈ H, we have g−1hg ∈ H ∩ g−1Hg. So if g 6∈ H, thenby (14.6) we have H ∩ g−1Hg = 〈e〉. This implies that g−1hg = e, andso also h = e. But h 6= e, hence our assumption is false and g ∈ H. 2
We now state and prove our main theorem.
Theorem 14.6 (Frobenius’s Theorem) Suppose H is a proper non-neutral subgroup of G and (14.5) holds, that is
H ∩ g−1Hg = 〈e〉 for all g ∈ G\H. (14.6)
Let K be defined by
K = G \⋃
g∈Gg−1(H\〈e〉)g. (14.7)
Then K / G, G = KH and H ∩K = 〈e〉.
The proof of this result given below is due to Weilandt. It is quite long, andso we have split it up into a number of more manageable parts. In the mainpart, Sublemmas 2 to 5, we show that K can be treated as the kernel of acharacter, and so its normality will follow.
Sublemma 1 The set K is closed under inner automorphisms.
Proof. Suppose not, that is suppose for some g, h ∈ G we have g ∈ Kand h−1gh 6∈ K. Using (14.6) this gives h−1gh ∈ j−1(H\〈e〉)j for somej ∈ G. But then g ∈ (jh−1)−1(H\〈e〉)(jh−1), and g 6∈ K. This is acontradiction, and so Sublemma 1 follows. 2
Clearly e ∈ K and K is closed under inverses (Problem 14.15). Hence weneed to show that K is closed under its operation which is the main part ofthe proof. We proceed as follows. Let φ be an arbitrary irreducible characterfor H which is not the principal character 1H , and define ψ by
ψ(g) =
{φ(e) if g ∈ Kφ(a−1ga) if a−1ga ∈ H\〈e〉 where a ∈ G.
Sublemma 2 The function ψ given above is well-defined.
Proof. Suppose a−1ga, b−1gb ∈ H\〈e〉. Then b−1gb ∈ (a−1b)−1H(a−1b)and so
e 6= b−1gb ∈ H ∩ (a−1b)−1H(a−1b).
But by our main assumption (14.6) this implies that a−1b ∈ H and soφ(b−1gb) = φ(b−1aa−1gaa−1b) = φ(a−1ga) as φ is a class function; thatis ψ is well-defined. 2
Our next task is to show that
Sublemma 3 The function ψ is a class function for G (Definition 13.16).

446 14 Character Tables, and Theorems of Burnside and Frobenius
Proof. There are two cases to consider corresponding to the two linesin the definition of ψ above. First suppose g ∈ K, then by (i) a−1ga ∈ Kfor a ∈ G, and so
ψ(a−1ga) = φ(e) = ψ(g).
Secondly suppose g ∈ G\K, so g 6= e and g = c−1hc for some h ∈ Hand c ∈ G. Now if b ∈ G
b−1gb = b−1c−1hcb ∈ (cb)−1H(cb) and so ψ(b−1gb) = φ(h) = ψ(g).
This proves Sublemma 3. 2
Now suppose χ1 = 1G, . . . , χh(G) is a list of the irreducible characters ofthe group G. Set
ρ = ψ − φ(e)χ1. (14.8)
In the next sublemma we provide an evaluation of this function.
Sublemma 4 The function ρ defined above can be expressed by
ρ =∑h(G)
i=1riχi
where ri ∈ Z, i = 1, . . . , h(G), and r1 = −φ(e).
Later we show that ri ≥ 0, and rj = 0 for all but one value of j. Beforereading this proof the reader should refer to Problem 13.19.
Proof. First note that ρ(k) = 0 for k ∈ K by definition and as χ1(e) =1, so we can argue as follows.
ri = 〈ρ, χi〉G see Theorem 13.28
= 1/o(G)∑
g∈G\Kρ(g)χi(g
−1) by Definition 13.25 and
as ρ is zero on K
=1
o(G)
o(G)
o(H)
∑h∈H\{e}
ρ(h)χi(h−1).
This last equation follows from Lemma 14.5 as class functions are con-stant on conjugacy classes. Hence as ρ(e) = 0
ri = 1/o(H)∑
h∈Hρ(h)χi(h
−1)
= 〈ρ, χi〉H by Definition 13.25
= 〈ψ − φ(e)χ1, χi〉H by definition of ρ.
Now note that the restriction (Problem 13.19) of χi to H can be ex-pressed as a linear combination, with coefficients in Z of the irreduciblecharacters of H, hence ri ∈ Z for i = 1, . . . , h(G). Also repeating theabove argument we have
r1 = 〈ρ, 1G〉G = 〈φ− φ(e) 1H , 1H〉H = −φ(e). 2

14.3 Frobenius Groups 447
Next we show, using Sublemma 4, that
Sublemma 5 The function ρ is an irreducible character of G.
Proof. Using an argument similar to that above we have∑h(G)
i=1r2i = 〈ρ, ρ〉G by Theorem 13.28
=1
o(G)
o(G)
o(H)
∑h∈H\{e}
|ρ(h)|2 as above
= 〈ρ, ρ〉H as ρ(e) = 0
= 〈φ− φ(e) 1H , φ− φ(e) 1H〉H by definition
= 1 + φ(e)2 = 1 + r21 by Theorem 13.21.
By Sublemma 4 each ri is an integer, and so each r2i is a non-negativeinteger. Hence the only possibility is that rj = ±1 for some j, and rl = 0if l 6= j. Therefore
ρ = ψ − φ(e)χ1 = ±χj − φ(e)χ1
where χj is irreducible. But by definition ψ(e) = φ(e) > 0, hence ρ =χj − φ(e)χ1. 2
For the final part of the proof let φi, for i = 1, . . . , h(H), be a list of theirreducible characters of H where φ1 = 1H , and let θ be the regular characterof H (see page 404), that is
θ =∑h(H)
i=1φi(e)φi.
Sublemmas 2 to 5 can now be applied to each φi in turn. So for i = 1, . . . , h(H)we have ψi(k) = φi(e), if k ∈ K, and ψi(g) = φi(a
−1ga) where a−1ga ∈H\{e} for some a ∈ G. Define ξ by
ξ = χ1 +∑h(H)
i=2φi(e)ψi,
this gives
ξ(e) = 1 +∑h(H)
i=2φ(e)2 = o(H) by Theorem 13.21(iii)
We also have using the equation above
ker ξ = {g ∈ G : ξ(g) = ξ(e) = o(H)}.
We can now prove our main subresult which is given overleaf.

448 14 Character Tables, and Theorems of Burnside and Frobenius
Sublemma 6 K = ker ξ.
Proof. We show first that
K ⊆ ker ξ (14.9)
as follows. If k ∈ K we have
ξ(k) = 1 +∑h(H)
i=2φi(e)ψi(k) = 1 +
∑φi(e)
2 = o(H) = ξ(e)
which proves the inclusion (14.9). For the reverse inclusion supposeh ∈ H, then
ξ(h) = 1 +∑h(H)
i=2φi(e)ψi(h) =
∑h(H)
i=1φi(e)φi = θ(h)
where θ is the regular character; see above. This gives
H ∩ ker ξ = 〈e〉 (14.10)
as ker θ = 〈e〉 and θ is faithful. We also have using (14.7) and Lagrange’sTheorem (Theorem 2.27)
o(K) = o(G)− [G : H](o(H)− 1) = [G : H]. (14.11)
Now using Theorem 5.8 we obtain
o(H ker ξ) =o(H)o(ker ξ)
o(H ∩ ker ξ)= o(H)o(ker ξ) by (14.10)
≥ o(H)o(K) by (14.9)
= o(G)
by (14.11). This gives o(ker ξ) = o(K), and so by (14.9) K = ker ξ / G.2
Proof of Theorem 14.10 Sublemma 6 shows that K is a normal sub-group of G. Also (14.10) shows that
G = KH and K ∩H = 〈e〉,
and so the proof of Frobenius’s theorem is complete. 2
Bender has given an elementary non-character theoretic proof of the result,but it only applies in the case when o(H) is even; see for example Kurzweiland Stallmacher (2004), page 83.
Definition 14.7 A group G with subgroup H satisfying the conditions ofTheorem 14.6 is called a Frobenius group with respect to H, and the normalsubgroup K given by the theorem is called the Frobenius kernel of G. Thesubgroup H is called a Frobenius complement.

14.3 Frobenius Groups 449
In the exampleG = S3 with respect toH = 〈(1, 2)〉 given at the beginningof this section, the Frobenius kernel is the normal subgroup 〈(1, 2, 3)〉, andwe have the same kernel with respect to each of the three subgroups of S3
with order 2, so each can act as a Frobenius complement in this case.
Fixed-point-free automorphisms
A Frobenius group G with respect to H having Frobenius kernel K is clearlya semi-direct product of K by H; see the last line in the proof above andChapter 7. It has another property related to the notion of fixed-point-freeautomorphisms which we discuss now. We begin with
Definition 14.8 Suppose σ is an automorphism of a group G which is notthe identity map. The map σ is called fixed-point-free on G if, and only if,gσ 6= g for all g ∈ G where g 6= e.
For an example we return to the group S3 discussed above. We can define anautomorphism σh of K by
gσh = h−1gh for h ∈ H\{e} = {(1, 2)} and g ∈ K\{e}.
This is fixed-point-free on K for we have (1, 2)(1, 2, 3)(1, 2) = (1, 3, 2) 6=(1, 2, 3) and (1, 2)(1, 3, 2)(1, 2) = (1, 2, 3) 6= (1, 3, 2).
The relationship between Frobenius’s Theorem and fixed-point-free au-tomorphisms is given by the following
Theorem 14.9 For a group G the following two statements are equivalent.
(i) The group G is Frobenius with Frobenius complement H and Frobeniuskernel K.
(ii) If H < G, K / G, H 6= 〈e〉, G = KH and h ∈ H\〈e〉, then the automor-phism τh defined by
τh(k) = h−1kh
is fixed-point-free on K.
Proof. (i) implies (ii). We only need to show that the automorphismis fixed-point-free. Suppose not, that is suppose τh(k) = h−1kh = k forsome k ∈ K\{e} and h ∈ H\{e}. This gives h−1k−1h = k−1, and so
k−1hk = hh−1k−1hk = hk−1k = h ∈ H.
Hence h ∈ H ∩ k−1Hk, and so, as h 6= e, Frobenius’s Theorem impliesthat k = e is the only fixed-point of τh.
(ii) implies (i). For the converse we first need to show that K∩H =〈e〉. Suppose k ∈ K ∩H and k 6= e. The equation k−1kk = k providesa fixed-point for τk, and so, as k ∈ H, the hypothesis gives k = e,and K ∩H = 〈e〉 follows. Secondly, suppose h1 ∈ H ∩ g−1Hg for someg ∈ G\H; we need to show that h1 = e. As G = KH (given) we canfind k ∈ K and h ∈ H to satisfy: g = kh and k 6= e. We also have

450 14 Character Tables, and Theorems of Burnside and Frobenius
h1 ∈ g−1Hg, and so combining these we can find h2 ∈ H to satisfy:
h1 = k−1h2k ∈ H ∩ k−1Hk.
Also h1h−12 ∈ H and, as K / G by hypothesis,
h1h−12 = k−1h2kh
−12 ∈ K.
These give h1h−12 ∈ K∩H = 〈e〉, and so h2 = h1 = k−1h2k, or rewriting
k = h−12 kh2 and k 6= e.
This is only possible if h2 = e, then also h1 = e, and H ∩ g−1Hg = 〈e〉follows. 2
Below we give some examples, but first we list some of the more importantauxiliary properties of Frobenius groups.
Main Properties of Frobenius Groups
Suppose G is a Frobenius group with Frobenius complement H and Frobeniuskernel K. The following facts have been established.
(a) o(H)|o(K) − 1. This gives ([G : K], o(K)) = 1, and so K is acharacteristic subgroup of G; see Problem 4.24.
(b) All complements of K in G are conjugate to H.
(c) The Frobenius kernel K is nilpotent; this important fact is due toThompson, indeed he proved it in his Ph.D. thesis!
(d) The Sylow subgroups of H are either cyclic or have the form Q2n ,a dicyclic group. This second case only arises for 2-subgroups. Hence if2 - o(H), then all Sylow subgroups of H are cyclic which implies thatH is soluble (Section 11.1 and Theorem 6.18).
(e) If 2 | o(H), then H has only one involution, j say, and j−1kj = k−1
for all k ∈ K which in turn implies that K is Abelian. If H is not soluble,see (d), and H(r) is the last non-neutral term in the derived series forH (so H(r) = H(r+1) 6= 〈e〉, see page 234), then H(r) ' SL2(5); aremarkable result which is due to Zassenhaus.
Derivations of most of these properties can be found in Huppert (1998).
Finally we give four examples to illustrate the important results discussedin this section.
Example 1. Groups of order pq
In Problem 6.14 we showed that a non-Abelian group G with o(G) = pqwhere p and q are prime and p | q − 1, has a presentation of the form

14.3 Frobenius Groups 451
G ' 〈a, b | aq = bp = e, b−1ab = ar〉
where rp ≡ 1(mod q) and rt 6≡ 1(mod q) for 0 < t < p. We show now that ifK = 〈a〉 / G and H = 〈b〉 ≤ G, then G is Frobenius with respect to H, andhas Frobenius kernel K. We have G = KH by Lagrange’s Theorem, and sowe need to show that H ∩ g−1Hg = 〈e〉 provided g 6∈ H, that is g = btau forsome t and u with u 6= 0. Let bm = h ∈ H, then
g−1hg = (btau)−1bm(btau) = a−ubmau = bmau(1−rm) 6∈ H
because u 6= 0 and rm 6≡ 1(mod q) if 0 < m < p. This gives the requiredcondition, and so G is Frobenius with respect to H and it has kernel K. Notethat in this case both the Frobenius complement and kernel are cyclic. It islikely that it was this example, or similar, which led Frobenius to develophis theory. See Problem 3.6 where a permutation version is given; as notedabove Frobenius first presented his theorem in terms of permutation groups.
Example 2. Frobenius groups with kernels of large nilpotency class
In (c) on page 450 we stated that the kernel of a Frobenius group isalways nilpotent, we give here an example whose Frobenius kernel has alarge nilpotency class. We work over the field F11, and let K = IT3(11), seeProblem 3.15, and A be the 3× 3 diagonal matrix with diagonal entries 1, 3and 4. Note that 15 = 35 = 45 = 1 in F11, and neither 3m nor 4m equal 1,if 0 < m < 5. (There is nothing special about 1, 3 or 4, we could use anythree distinct members of the set {1, 3, 4, 5, 9}, quadratic residues modulo11.) Lastly let H = 〈A〉; we have A5 = I3 and H is a cyclic group of order 5.Now H acts fixed-point-freely on K, for if(
1 t u0 1 v0 0 1
)=
(1 0 00 3 00 0 4
)−m( 1 t u0 1 v0 0 1
)(1 0 00 3 00 0 4
)m=
(1 3mt 4mu0 1 5mv0 0 1
),
and 0 < m < 5, then t = u = v = 0. Hence by Theorem 14.9, the groupKH, a subgroup of GL3(11) with order 5 · 113 = 6655, is Frobenius, and byProblem 3.15 the kernel K is nilpotent with class 2.
Similar examples exist using the groups ITn(p), provided the prime 5 inthe above calculation is replaced by another prime q with q > n, and we workover Fp where p is again prime and q | p − 1. The Frobenius group then hasa kernel with nilpotency class n− 1.
Example 3. A Frobenius group whose complement is not soluble
As noted above Zassenhaus has shown that a non-soluble Frobenius com-plement will always ‘involve’ the group SL2(5), see (e) on page 450, and Pass-man (1968), page 202. Here we give an example of a Frobenius group whosecomplement is this group. It can be shown that 2
2 We have shown that SL2(5)/Z(SL2(5)) ' A5 (see Problem 3.19), and so the presentationon page 452 can be constructed using Problem 3.26W which gives a presentation of A5;see Passman (1968), page 202 for details.

452 14 Character Tables, and Theorems of Burnside and Frobenius
SL2(5) ' 〈a, b, c | a3 = b5 = c2, cac = a, cbc = b, (ab)2 = c〉. (14.12)
We work over F29; we choose 29 because it is larger than 5, both −1 and5 are quadratic residues modulo 29, and it is the smallest prime satisfyingthese conditions. Define the following three matrices in GL2(29)
A =
(28 128 0
), B =
(0 1717 23
), C =
(28 00 28
).
A straightforward series of matrix calculations using the relations in (14.12)shows that if we set a 7→ A, b 7→ B and c 7→ C, then the group 〈A,B,C〉 'SL2(5). Now
if (r, s)D = (r, s) then r = s = 0 for all D ∈ 〈A,B,C〉. (14.13)
If we let K = C29 × C29, and we treat K as the 2-dimensional vector spaceover F29, then (14.13) gives a fixed-point-free automorphism of K. Hence(C29 × C29)SL2(5) is Frobenius with a non-soluble complement.
Suzuki Groups
For our last example we consider some Frobenius groups which are subgroupsof GL4(22m+1) for m = 1, 2, . . . , some extensions will give an important classof simple groups – Suzuki groups. For the first of these we work over the fieldF8 (so m = 1), and begin by defining the matrices
A(a, b) =
1 a b a6 + ab+ b4
0 1 a4 a5 + b0 0 1 a0 0 0 1
,
and
B(c) =
c−3 0 0 00 c−2 0 00 0 c2 00 0 0 c3
,
where a, b, c ∈ F8 and c 6= 0. The following three properties are easily proved:
(i) A(a′, b′)A(a, b) = A(a′ + a, a′a4 + b′ + b),
(ii) B(c)B(d) = B(cd) provided c, d 6= 0,
(iii) B(c)−1A(a, b)B(c) = A(ac, bc5).
(Use the facts that in F8 we have (a + c)6 = a6 + a4c2 + a2c4 + c6 and(b4c)4 = b2c4 as the multiplicative group of this field has order 7.) Let
K = 〈A(a, b) | a, b ∈ F8〉 and H = 〈B(c) | c ∈ F8\{0}〉.
14.3 Frobenius Groups 453
First we note that K is a non-Abelian 2-group with exponent 4 and order64, and
K ′ = Z(K) = {A(0, b) | b ∈ F8},as the reader can easily check, note that K has nilpotency class 2. Now KH isFrobenius with order 64 · 7 = 448. This follows because K / KH by (iii), andH acts fixed-point-freely on K because, by (iii) again, A(a, b) = A(ac, bc5) isonly possible if c = 1.
We use this group to construct the first Suzuki group Sz(8). Let
C =
0 0 0 10 0 1 00 1 0 01 0 0 0
,
and define
Sz(8) = 〈A(a, b), B(c), C | a, b ∈ F8, c ∈ F8\{0}〉.
It can be shown that this group is simple and has order 65 · 448 = 29120;see Huppert and Blackburn III (1982b). Also it is possible to give a (finite)geometrical description as follows. We work in the 3-dimensional projectivespace over F8, which we label P3. (The space P3 has coordinates of the form(a : b : c : d) where at least one of a, b, c and d is non-zero, and if t 6= 0 then(a : b : c : d) = (ta : tb : tc : td). Also points with coordinates (0 : b : c : d) aresaid to lie on the ‘plane at infinity’.) Let O denote the set of points
P (r, s) = (1 : r : s : r6 +rs+s4) for r, s ∈ F8, and P (∞) = (0 : 0 : 0 : 1).
The objectO is called an ovoid which means that it is ‘sphere-like’ or ‘convex’.To be more precise, no line in P3 meets O in more than two points. Forexample the points on the line through P (0, 0) and P (∞) have coordinatesa(1 : 0 : 0 : 0) + b(0 : 0 : 0 : 1) = (a : 0 : 0 : b), and this point only lies on Oif a = 0 or if b = 0, so is either P (0, 0) or P (∞); the reader should check theremaining cases. The relationship with Sz(8) is given by
Theorem 14.10 (i) The group of collineations (this is the name given to alinear map in projective space) which map O to itself is isomorphic to Sz(8).
(ii) The order of Sz(8) equals 65 times the order of the Frobenius group KH,that is 65 · 448 = 29120 = 26 · 5 · 7 · 13.
(iii) The group Sz(8) is simple.
(iv) If p is odd, then all Sylow p-subgroups of Sz(8) are cyclic.
For a proof see Huppert and Blackburn III (1982b), pages 182 to 194, andfor (iv) see Theorem 6.18. Note that
(a) the factor 65 in (ii) arises because o(O) = 65,
(b) The simplicity result in (iii) is a consequence of (i),
(c) The prime 3 does not divide o(Sz(8)), and

454 14 Character Tables, and Theorems of Burnside and Frobenius
(d) the Sylow 2-subgroups of Sz(8) are isomorphic to K, and so arenot cyclic. (It has been shown that the only non-Abelian simple groupswith this property are L2(2n), L2(p), Sz(22n+1), and the Janko groupJ1 (web page 390) where n > 1 and p > 3.)
The construction given above is only the first of an infinite family. In thegeneral case we work over the field F22n+1 , n = 1, 2 . . . . The matrix A(a, b) isreplaced by
An(a, b) =
1 a b aξa2 + ab+ bξ0 1 aξ aξa+ b0 0 1 a0 0 0 1
, for a, b ∈ F22n+1 ,
where ξ is the automorphism of the multiplicative group of F22n+1 defined by
aξ = a2n+1
(so aξ2 = a2), and the matrix B(c) is replaced by Bn(c) whichis again diagonal with diagonal entries c−1−2
n
, c−2n
, c2n
and c1+2n . Now wedefine
Sz(22n+1) = 〈An(a, b), Bn(c), C | a, b, c ∈ F22n+1 and c 6= 0〉.
The main properties of these groups are as follows.
(i) Sz(22n+1) is simple for n = 1, 2, . . . . This is proved as before by firstshowing that an ovoid similar to that defined above is invariant undercollineations associated with the group.
(ii) The order of Sz(22n+1) is q2(q − 1)(q2 + 1) where q = 22n+1. It iseasily seen that this order is not divisible by 3. Note that both q andq2 + 1 are congruent to 2 modulo 3. Thompson has shown that theorder of every non-Abelian simple group is divisible by 3 or 5, and it isknown that the order must be even (the Feit-Thompson Theorem). Itcan be also be shown that the only simple groups whose orders are notdivisible by 3 are the Suzuki groups. There is a whole range of groupswhose orders are not divisible by 5, see Problem 14.23 and the Atlas.
(iii) For odd primes p, all Sylow p-subgroups of all Suzuki groups arecyclic.
(iv) If g ∈ Sz(q) and g 6= e, then the centraliser CSz(q)(g) is nilpo-tent. The only other non-Abelian simple groups with this property areL3(4), L2(2n), L2(9) and L2(p) where p is a Fermat or Mersenne prime;see page 444.
(v) The only outer automorphisms of Sz(q) are those generated by fieldautomorphisms of Fq.(vi) When first discovered in 1960, these groups were thought to be new.But it was soon realised that they had been studied in another guisesome years previously by Chevalley, for the Suzuki group Sz(22n+1) isin fact isomorphic to the so-called Twisted Chevalley Group 2B2(22n+1).For further details see the Atlas (1985) page xv.
(vii) Amongst the Suzuki groups Sz(8) has a number of individual prop-erties; for instance (a) it is the only one ‘involved’ (is a factor group of

14.4 Problems 14 455
a subgroup of the group in question) in a sporadic group – the Rudalisgroup Ru (and possibly the friendly giant M , an open problem); and(b) it is the only Suzuki group with a non-neutral Schur multiplier –C2
2 ; see web page 391.
Some proofs and more details can be found in the reference quoted above.
But finally we ask: How did these groups arise in the first place? In the1930’s Zassenhaus and others were studying permutation representations ofthe groups L2(p); see Chapter 12. He noted that they have three particularproperties:
(a) they are doubly transitive,
(b) each non-neutral element has at most two fixed points, and
(c) they do not possess a regular normal subgroup.
For a definition of ‘regular’ see Problem 3.8. Note that if G is a permutationgroup on X, and H is a regular normal subgroup of G, then o(H) = o(X),also in Forbenius’s Theorem (Theorem 14.6), the Frobenius kernel is a reg-ular normal subgroup. Nowadays groups whose permutation representationssatisfy properties (a), (b) and (c) are called Zassenhaus groups. Zassenhaustried to show that the only groups satisfying (a) to (c) are the linear groupsL2(p), but he did not succeed because it is not true. In 1960 Suzuki discov-ered his class of groups Sz(q), and he was able to show that each Sz(q) isin fact Zassenhaus, and he and several other group-theorists proved finallythat there are no other examples. And this illustrates one of the main ‘meth-ods’ in the theory – the classification method which can be stated as follows:Introduce a collection of properties, like (a), (b) and (c) above, find somegroups with these properties, and then show that – and this is usually thehardest part to establish – no other groups satisfy these properties. CFSGwas solved using this and similar strategies on several sets of properties, andshowing finally that these sets cover all possibilities!
14.4 Problems 14
Problem 14.1 Write out the character tables for the groups C2 and C4.
Problem 14.2 (i) Complete the character table calculations for the groupC2 × C2 started on page 435.
(ii) Confirm directly that the Column Orthogonality Relations hold forthe group A4 using Table 4 on page 437.
Problem 14.3 � Construct the character tables for the groups Dn whenn is odd.
Problem 14.4 Construct the character table for the quaternion group Q2.What do you notice about this table and the one given for a group of order8 (D4) in Section 14.1.

456 14 Character tables, and Theorems of Burnside and Frobenius
Problem 14.5 � (i) You are given the result: If ω is an n-th root of unitythen ∑
1≤i≤n, (i,n)=1ωi is an integer.
Using Theorem 13.15 and Corollary B20 on page 460, show that if g ∈G, o(g) = n and g is conjugate to gi for all i in the range 1 ≤ i ≤ n with(i, n) = 1, then χ(g) is an integer for all characters χ of G.
(ii) Use (i) to show that all character values of all symmetric groups Snare rational integers.
Problem 14.6 Using the previous problem show that the character tablegiven for the permutation group S4 below is correct.
g e (1, 2) (1, 2, 3) (1, 2, 3, 4) (1, 2)(3, 4)o(CS4
(g)) 24 4 3 4 8
χ1 1 1 1 1 1χ2 1 −1 1 −1 1χ3 2 0 −1 0 2χ4 3 1 0 −1 −1χ5 3 −1 0 1 −1
Table 7. Character Table for S4
Problem 14.7 � Using the theory of tensor products (see for exampleJames and Liebeck (1994), Chapter 19) it can be shown that if χ is a characterof a group G, then so are χS and χA where, for g ∈ G,
χS(g) = (χ2(g) + χ(g2))/2 and χA(g) = (χ2(g)− χ(g2))/2.
Neither of these new characters need be irreducible even if χ is irreducible.Use these, and the fix (Problem 13.16) and linear characters to construct thecharacter table for S5. (Hint. The character table is 7× 7.)
Problem 14.8 The character table for the group SL2(3) is given belowwhere ω = e2πi/3. Show that this table is correct using Section 8.2, and oneof the tables given in Section 14.1.
g e a3 a2 b2 ab a bo(CSL2
(3)) 24 24 6 6 4 6 6
χ1 1 1 1 1 1 1 1χ2 1 1 ω ω2 1 ω2 ωχ3 1 1 ω2 ω 1 ω ω2
χ4 3 3 0 0 −1 0 0χ5 2 −2 −1 −1 0 1 1χ6 2 −2 −ω −ω2 0 ω2 ωχ7 2 −2 −ω2 −ω 0 ω ω2
Table 8. Character Table for SL2(3)

14.4 Problems 14 457
Problem 14.9 (i) Let ω be a cube root of unity. Show that the mapping
a 7→(ω 00 −ω−1
)and d 7→
(0 1−1 0
)gives a 2-dimensional representation of the group E discussed in Section 8.3;use the presentation (8.8) of E given on page 182. Apply this to calculate allof the irreducible representations of E.
(ii) Use (i) to justify the character table for E given below.
g e a2 b c a2c bc bc2 a abo(CE(g)) 24 24 12 12 12 12 12 4 4
χ1 1 1 1 1 1 1 1 1 1χ2 1 1 1 1 1 1 1 −1 −1χ3 1 1 −1 1 1 −1 −1 1 −1χ4 1 1 −1 1 1 −1 −1 −1 1χ5 2 −2 0 2 −2 0 0 0 0χ6 2 2 −2 −1 −1 1 1 0 0χ7 2 2 2 −1 −1 −1 −1 0 0χ8 2 −2 0 −1 1 −i
√3 i
√3 0 0
χ9 2 −2 0 −1 1 i√
3 −i√
3 0 0
Table 9. Character Table for E
Problem 14.10 Use Burnside’s first theorem (Theorem 14.3) to show thatno group of order 1200 can be simple.
Problem 14.11 � Prove that if H is an Abelian subgroup of a non-Abelian simple group G, then [G : H] has at least two prime factors. (Hint.Consider a centraliser of an element of H and use Theorem 14.3.)
Problem 14.12 Prove the following result due to P. Hall (Section 11.2):
If G is finite and every maximal subgroup has prime or prime-squaredindex, then G is soluble.
Method. Let G0 be a counter-example with smallest possible order and letp0 be the largest prime factor of o(G0). Consider P0, a Sylow p0-subgroup ofG0, and treat the cases P0 normal, and P0 not normal, separately, choose amaximal subgroup H of G0 which contains NG0
(P0), and use Problem 6.10(i)and Burnside’s Theorem.
Problem 14.13 The problem refers to Note (e) on page 443.
(i) Suppose o(G) = prqs where p and q are primes. Let P1, . . . , Pm bea list of the Sylow p-subgroups of G, and suppose m > 1. Show that ifPi ∩ Pj = 〈e〉 if i 6= j, then each Pi is cyclic.
(ii) It was stated in Note (e) that the situation described in (i) can onlyarise in three particular cases. Give examples for the first two.

458 14 Character tables, and Theorems of Burnside and Frobenius
Problem 14.14 Show that a groupG with a subgroupH which is nilpotentand has prime power index is soluble.
Problem 14.15 Show that in the statement of Frobenius’s Theorem (The-orem 14.6) the setK is closed under inverses and contains the neutral element.(Hint. See the proof of Sublemma 1 on page 445.)
Problem 14.16 Prove that the centre of a Frobenius group is isomorphicto the neutral subgroup.
Problem 14.17 Let n > 1. Show that the dihedral group Dn is Frobeniusif, and only if, n is odd.
Problem 14.18 Show that Q2 can act fixed-point-freely on C3×C3. (Hint.Think of this latter group as a vector space of dimension 2 over F3). Henceshow how to construct a Frobenius group of order 72.
Problem 14.19 Let H = ES2(7), see Problem 6.5.
(i) Show that the mapping given by a 7→ a2c, b 7→ b2, c 7→ c4 defines anautomorphism of H of order 3.
(ii) Show that the semi-direct product C3 oH provides an example of aFrobenius group with a non-Abelian Frobenius kernel.
Problem 14.20 Let σ be a fixed-point-free automorphism of G of order n.
(i) Show that if (m,n) = 1 then σm is also fixed-point-free.
(ii) Let ν be given by gν = g−1(gσ). Show that ν is an isomorphism.
(iii) Show that if g and gσ are conjugate in G, then g = e.
(iv) Further show that if g ∈ G, then g · gσ · · · · gσn−1 = e.
(v) If n = 2, prove that g−1 = gσ for g ∈ G, and deduce G is Abelian.
Problem 14.21 Suppose H ≤ GLm(F ) and o(H) = pq where p and q areprimes which can be equal. Prove that H is cyclic.
Problem 14.22 Let G = GL2(7). Show that G has a subgroup of order 12which has no fixed points when it is applied to the vector space of dimension2 defined over the field F7.
Problem 14.23 Give examples to show that there are infinitely manysimple groups whose orders are not divisible by 5, see (ii) on page 454.
Problem 14.24 (i) Suppose G is a Frobenius group with Frobenius kernelK and complement H. Show that if J / G, then J ≤ K or K ≤ J .
(ii) Prove that o(H) | o(K)− 1, and so deduce (o(K), [G : K]) = 1. Thisshows that K is a characteristic subgroup of G, see Problem 4.22.
(iii) Using Thompson’s Theorem (see (c) on page 450) show that K =F(G), the Fitting subgroup of G.

B2 Algebraic Integers 459
Appendix B2 Algebraic Integers
A character of a group G is a function from G into the ring of algebraicintegers A. Here we describe the basic properties of the elements of A. Forfurther details see, for example, Stewart, I. N. and Tall, D. O. Algebraic Num-ber Theory, Chapman and Hall, London, 1979. This subsection is intendedas an addition to Appendix B.
Definition B17 An algebraic integer is a complex number which satisfies amonic (that is the leading coefficient is 1) polynomial equation with rationalinteger coefficients.
For example 7, 1+i,√
3 and (1+√−3)/2 are all algebraic integers. The reader
should check this.
For our purposes the main facts we need to know about the set of algebraicintegers A is that it is closed under addition, subtraction and multiplication.Addition and multiplication are clearly associative and there exists a multi-plicative identity 1, hence A forms an integral domain. We need to prove onelemma before we can derive our main result.
Lemma B18 Let z1, . . . , zm be a set of complex numbers, and let Z denotethe collection of all sums of the form∑m
i=1rizi where ri ∈ Z.
If y ∈ C and yz ∈ Z for all z ∈ Z, then y is an algebraic integer.
Proof. The set Z is clearly closed under addition and scalar multipli-cation by elements of Z. As yzi ∈ Z for 1 ≤ i ≤ m by hypothesis, wecan find rational integers rij to satisfy
yzi =∑m
j=1rijzj for i = 1, . . . ,m.
Rewriting this equation we have∑m
j=1(rij − δijy)zj = 0 for i = 1, . . . ,m,
where δij = 0 if i 6= j, and δii = 1. Hence this set of m homogeneousequations in m variables has a nonzero solution (by hypothesis andbecause the result clearly holds if y = 0), and so
det(rij − δijy) = 0.
The result follows because this equation can be rewritten as a poly-nomial equation in y with integer coefficients (as rij ∈ Z) and lead-ing coefficient 1. The only term in the sum defining the determinantabove which involves yn is the product of its diagonal elements, viz:∏mi=1(rii − y), and the coefficient of y in this product is ±1. 2

460 Appendix B Number Theory
Theorem B19 The set of algebraic integers is closed under addition andmultiplication, and so forms an integral domain.
Proof. Let y1 and y2 be algebraic integers satisfying monic polynomialequations (with integer coefficients) of degrees n1 and n2, respectively.Further, define
zij = yi1yj2 for 0 ≤ i < n1 and 0 ≤ j < n2,
and let Z1 denote the set of sums of the form∑n1−1
i=0
∑n2−1
j=0rijzij ,
where rij ∈ Z. The elements of Z1 are clearly complex numbers, andset Z1 is closed under addition and scalar multiplication by elements ofZ, and so that it satisfies the conditions set out in Lemma B18. It isnow a simple matter to check that
ykzij , (y1 + y2)zij and y1y2zij
all belong to Z1 for 0 ≤ i < n1, 0 ≤ j < n2 and k = 1, 2. Note thatif ynk
k occurs in a calculation, then it can be replaced by a polynomialexpression in lower powers of yk using its defining equation. Hence byLemma B18, both y1 + y2 and y1y2 are algebraic integers. The resultnow follows as the remaining properties are inherited from the complexnumbers. 2
Note that the two proofs above work in a module over Z. A module is similarto a vector space except that the underlying field is replaced by an integraldomain which in this case is Z.
The following corollary is used in both Chapters 13 and 14.
Corollary B20 If a complex number y is both an algebraic integer and arational number, then it belongs to Z.
Proof. By hypothesis y satisfies a polynomial equation of the form
yn + r1yn−1 + · · ·+ rn = 0 where ri ∈ Z for i = 1, . . . , n.
Suppose n > 1. Now y is also a rational number, and so y = a/b forsome a, b ∈ Z where b 6= 0 and (a, b) = 1. Substituting this value of yin the equation above and multiplying by bn we obtain
0 = an + r1an−1b+ · · ·+ rnb
n = an + b(r1an−1 + · · ·+ rnb
n−1).
This is impossible if n > 1 because (an, b) = 1 by definition. 2

Solution Appendix
Answers and Solutions to Problems
Answers, hints and/or sketch solutions to most of the problems are givenbelow. If a problem has wide applicability then a fuller solution is provided.Note that in some cases other methods will exist; you may find better, clearerand/or shorter solutions compared with those given below. It is important tonote that a number of these ‘solutions’ are incomplete, there are often detailsfor you to fill in. Please notify the author about any errors or omissions.
Solutions 2
Problem 2.1 (i) Let X = {g : g ∈ G} and, for a ∈ G, let Ya = {ag :g ∈ G}. By closure Ya ⊆ X, and for each g ∈ G, g = a(a−1g) and soX = {a(a−1g) : g ∈ G} ⊆ Ya; hence X = Ya. Secondly, if Z = {g−1 : g ∈ G},then Z ⊆ X as G is closed under inverses, but g = (g−1)−1 and so X ={(g−1)−1 : g ∈ G} ⊆ Z, hence Z = X.
(ii) Use induction on n for the term g = g1� g2�· · ·� gn when n > 2. Forn = 3 the associativity axiom applies. Secondly, assume that the result holdsfor all bracketings of expressions with m elements where m < n. Considertwo bracketings of g:
(g1�· · ·�gj)� (gj+1�· · ·�gn) and (g1�· · ·�gk)� (gk+1�· · ·�gn) (2.1)
where j ≤ k. If j = k use the inductive hypothesis on the terms in the roundbrackets, and if j < k, use the inductive hypothesis again to rewrite (2.1) as
(g1 � · · · � gj)�((gj+1 � · · · � gk)� (gk+1 � · · · � gn)
)and(
(g1 � · · · � gj)� (gj+1 � · · · � gk))� (gk+1 � · · · � gn).
Now use associativity. A similar argument applies if j > k. A further inductiveargument is needed if more pairs of brackets are involved.

462 Solution Appendix Answers and Solutions to Problems
Problem 2.2 (i) The operation is closed by definition, it is associative asZ has this property, the neutral element is 0, and the inverse of a is 7 − a,for 0 ≤ a ≤ 6. Abelian.
(ii) The operation is closed and associative as in (i), the neutral elementis 1, and the inverses are given by: 1 · 1 ≡ 2 · 4 ≡ 3 · 5 ≡ 6 · 6 ≡ 1(mod 7).Abelian.
(iii) The operation is closed and associative as in Q, the neutral elementis −3, and the inverse of a is −a− 6. Abelian.
(iv) Matrix multiplication is closed and associative, the neutral element is
I2 =(1 00 1
), and if A =
(a bc d
), then A−1 =
(d −b−c a
)/ detA. Not Abelian.
(v) We have A2 = B2 =(−1 0
0 −1)∈ Q, and so A4 = B4 = I2. Also BA =(−i 0
0 i
)= A3B, and so BA2 = (BA)A = (A3B)A = A6B = A2B; similarly
BA3 = AB =(i 00 −i
). As A2 = B2, these equations show that the group has
eight elements: I2, A,A2, A3, B,AB,A2B and A3B. The group axioms follow
using (AB)−1 = BA = A3B et cetera. Not Abelian, for example AB 6= BA.This is a representation of the quaternion group Q2; see page 118.
(vi) f1 acts as the neutral element. To establish closure all cases have tobe checked separately, for instance, if x ∈ R,
f3(f4(x)) = 1− f4(x) = 1− (1/(1− x)) = −x/(1− x) = f5(x), and
f3(f4(∞)) = 1− f4(∞) = 1− (1/∞) = 1 = f5(∞).
We have f1, f2, f3 and f5 are self inverse, f−14 = f6 and f−16 = f4. The groupis isomorphic to the dihedral group D3; for example map f4 to α and f2 toβ in the definition on page 3. Not Abelian.
(vii) If θ and φ are isometries, then
d(x, y) = d(θ(x), θ(y)) = d(φ(θ(x)), φ(θ(y))),
and so the set is closed under composition because composition of two bijec-tions is a bijection. Composition is also associative, and the neutral elementis the identity function ι(x) = x for all x. Lastly, if θ is an isometry (and sois a bijection), then θ−1 is a bijection (see page 281), and
d(θ−1(x), θ−1(y)) = d(θ(θ−1(x), θ(θ−1(y))) = d(x, y),
hence θ−1 is also an isometry. Not Abelian, for example try rotation by π/3and reflection in the x-axis..
Problem 2.3 (i) Associativity fails because (a − b) − c 6= a − (b − c) ingeneral.
(ii) There is no neutral element and closure fails.
(iii) Not closed, for instance(1 10 1
)(1 01 1
)=(2 11 1
).
(iv) 0 ∈ Q but it has no inverse.

Solutions 2 463
Problem 2.4 (i) Let a ∈ S, so there exist c and c′ satisfying ac = aand c′a = a. Show first c = c′. For if b ∈ S, there exist d and d ′ satisfyingad = b = d ′a, so
bc = (d ′a)c = d ′(ac) = d ′a = b,
that is, c is a right neutral element. This holds for all b ∈ S, and so for b = c′,hence c′c = c′. Similarly using ad = b we have c′c = c, and so c = c′.
Uniqueness follows because we have shown that all solutions x of bx = bequal c, a solution of xb = b. Therefore the neutral element properties hold,so let c = c′ = e. Using the given conditions again, for a ∈ S, there exist a′
and a′′ satisfying aa′ = e = a′′a, and then a′′ = a′′e = a′′(aa′) = ea′ = a′.Lastly uniqueness can be proved as above.
(ii) First note that aa∗ and a∗a are idempotents because the given equationshows that
aa∗aa∗ = aa∗ and a∗aa∗a = a∗a. (2.2)
Now the given equation (twice) shows that (aa∗a)(a∗a∗∗a∗) = aa∗, hence by(2.2) we have
(aa∗)a∗∗a∗aa∗ = (aa∗aa∗)a∗∗a∗aa∗ = (aa∗a)(a∗a∗∗a∗)aa∗ = (aa∗)aa∗ = aa∗,
which by the given uniqueness property proves
a∗∗a∗ = (aa∗)∗. (2.3)
By (2.2) we also have aa∗aa∗aa∗ = aa∗, and so applying the uniquenessproperty again we obtain (aa∗)∗ = aa∗. Combining this with (2.3) givesa∗∗a∗ = aa∗, and using the given equation again we obtain a∗ = a∗(a∗∗a∗) =a∗(aa∗), hence by the uniqueness property
a∗∗ = a and aa∗ = (aa∗)∗
by (2.3). Now continue, you need to show that aa∗ = bb∗ so that you cantake aa∗ as the unique neutral element.
Problem � 2.5 (i) Apply Theorem 2.13; note that H ≤ G, and so H isnot empty.
(ii) H ∩ J = H is equivalent to H ⊆ J , so apply (i).
(iii) By Theorem 2.34, both H and J are cyclic. Suppose H = 〈a〉 andJ = 〈b〉. IfH∩J 6= 〈e〉, then there exists integers k and l satisfying 1 ≤ k, l < pand ak = bl. As (k, p) = 1 we can find an integer m to satisfy km ≡ 1(mod p).Then a = akm = blm and so H ⊆ J ; reversing this argument gives H = J .
Problem 2.6 SS = {s1s2 : s1, s2 ∈ S}, so SS ⊆ S by group closure, alsoS ⊆ SS because se ∈ SS for s ∈ S. Secondly suppose TT = T , so T isclosed under the group operation (for if t1, t2 ∈ T , then t1t2 ∈ TT = T ) andit is non-empty by definition. Since T is not empty, we use Theorem 2.7(iii)for inverses and the neutral element; hence T ≤ G. False if G is infinite, anexample is G = Z and T is the non-negative integers.

464 Solution Appendix Answers and Solutions to Problems
Problem � 2.7 (i) If (gh)n = e, then e = h(gh)nh−1 = (hg)n. If o(gh) isfinite, this shows that o(hg) | o(gh); now reverse argument to obtain equality.This also shows that if o(gh) is finite, so is o(hg); hence take contrapositivein the infinite case.
(ii) Suppose m > 0. We have
mn
(m,n)= n
m
(m,n)and
m
(m,n),
n
(n,m)∈ Z,
so (gm)n/(m,n) = e which gives o(gm) |n/(m,n). If not equal reverse argumentto obtain a contradiction as in (iv) below. If m = 0, then (m,n) = n andg0 = e, and if m < 0 use g−n = e.
(iii) Use (ii) and the Euclidean algorithm.
(iv) Suppose first (m,n) = 1, then LCM(m,n) = mn. We have (gh)mn =(gm)n(hn)m = e, and so o(gh) = m1n1 where m1 |m and n1 |n. If m1 < m.We have
(gm1n1hm1n1)n/n1 = e, so gm1nhm1n = e,
and so gm1n = e as o(h) = n. There exist integers r and s with rm+ sn = 1or snm1 = m1 − rmm1, hence e = gsnm1 = gm1 as gm1n = e which impliesthat o(g) ≤ m1 < m, a contradiction. If m and n have a common factor,remove it first and repeat this argument.
(v) By Lagrange’s Theorem (Theorem 2.27), the order of each elementof G divides o(G), hence go(G) = e for all g ∈ G. Second part follows bydefinition.
(vi) By (iv) we have gmn = e. Also by the Euclidean Algorithm (TheoremB2), as (m,n) = 1, there exist r, s ∈ Z satisfying rm + sn = 1. Put a = gsn
and b = grm, then ab = g = ba and am = e = bn. Suppose also a′b′ = g = b′a′
and (a′)m = e = (b′)n, then (a′)m(b′)m = (a′b′)m = (ab)m = ambm whichgives (b′)rm = brm. But rm = 1−sn, and so b = b′. Using a similar argumentwe have a = a′.
(vii) For example let A =(0 −11 0
)and B =
(0 1−1 −1
). Then A4 = B3 = I2,
but AB =(1 10 1
)which has infinite order in GL2(Q) as (AB)r =
(1 r0 1
).
Problem 2.8 (i) As o(G) < ∞ we can pair off elements ai of order largerthan 2 (so ai 6= a−1i ) by {(a1, a−11 ), (a2, a
−12 ), . . . }. Hence if o(G) is even, there
are an even number of elements of order 1 or 2 in G, but there is exactly oneelement e of order 1.
(ii) We have o((Z/pZ)∗) = p − 1 (every positive integer less than p iscoprime to p), so by Problem 2.7(v), if g ∈ (Z/pZ)∗ then o(gp−1) = e.
(iii) Use (i) as p − 1 is the only element of order 2 in (Z/pZ)∗, hence(p− 2)! ≡ 1(mod p) as inverses are unique.
Problem 2.9 We have g1 = e, and so the table has the following form,where the operation is defined by elements in the top row times elements inthe left-hand column,

Solutions 2 465
e g2 . . . gne e g2 . . . gng2 g2 ∗ . . . ∗· · · . . . ·· · · . . . ·gn gn ∗ . . . ∗
and each row and each column inside the box is a permutation of {g1, . . . , gn}with determined first entry, see Theorem 2.8. The converse does not holdas the example T below shows. The operation given by T is closed and ithas a neutral element and inverses. But it is not associative, and left andright inverses are not always equal. For instance (g3g4)g2 = g5g2 = g3 andg3(g4g2) = g3g5 = g4, also g2g4 = e and g3g2 = e.
T e g2 g3 g4 g5e e g2 g3 g4 g5g2 g2 g4 e g5 g3g3 g3 g5 g2 e g4g4 g4 e g5 g3 g2g5 g5 g3 g4 g2 e
Problem 2.10 (i) Use (−1)2 = 1, normal as R∗ is Abelian.
(ii) Clearly e ∈ X as e fixes all elements. If σ and τ are perms. which fix 3,so do στ and σ−1, see page 43. Not normal, eg: (2, 3, 4)(2, 4)(2, 4, 3) = (3, 4)which moves 3; for cyclic notation see page 44.
(iiia) A normal subgroup. For det I2 = 1, if detA = detB = 1 thendetA−1B = 1, and detC−1AC = 1, for all C ∈ GL2(Q).
(iiib) A subgroup. For In is upper triangular, and if A and B are uppertriangular, so are AB and A−1 (Lemma 3.16). Not normal. For example theconjugate of
(1 10 1
)by(2 11 1
)has lower left entry −1.
(iv) |1| = 1, and if |x|, |y| = 1 then |xy| = |x−1| = 1; normal as group isAbelian.
(v) The set Z is not empty as the identity function ι, where ι(x) = x for allx, is differentiable. If f and g are differentiable, so is f◦g as (d/dx)(f(g(x))) =f ′(g(x))g′(x) where the primes denote differentiation, also as f−1(f(x)) = xwe have (d/dx)(f−1(x)) = 1/(f ′(f−1(x)). Normal.
Problem 2.11 (i) Suppose H ≤ C∗ and o(H) = n, then if h ∈ H wehave hn = 1, the neutral element of C∗, by Problem 2.7(v). Hence h is ann-th root of unity, and so must belong to the set of all n-th roots of unity{e2πir/n : r = 0, 1, . . . , n− 1} which has n members. But H also has n mem-bers, and so H = 〈e2πi/n〉, the cyclic group generated by e2πi/n.
(ii) The group Q has infinitely many subgroups, examples are: 〈e〉; Z;set of rational numbers with square-free denominators; {a/pn : a, n ∈Z, p a prime, n ≥ 0}; and set of rationals with a finite decimal expansion.For further details see Web Section 7.5 where we show that Q has uncount-ably many subgroups which can be characterised in detail.

466 Solution Appendix Answers and Solutions to Problems
Problem 2.12 (i) {a,−a}, one for each a ∈ R+.
(ii) Left cosets are (3, n)S(3)5 , and right cosets are S
(3)5 (3, n), for n =
1, . . . , 6, where S(3)5 is the subgroup (' S5) of the group of all permuta-
tions on {1, . . . , 6} which fix 3; see Chapter 3.
(iiia) {A : detA = t}, one coset for each t ∈ Q∗.(iiib) The left coset of
(x yz w
)is set of matrices of the form
(ax ∗az ∗
)where
a 6= 0, similar for right cosets.
(iv) {seiθ : θ ∈ R}, one for each positive real number s; they form concen-tric circles in the complex plane with centre the origin and radius s.
(v) Cosets relate to the cardinality of the set of points where the func-tions are continuous but not differentiable, so one coset for each finite integerand many infinite cases. This is hard and requires a knowledge of transfiniteordinals!!
Problem 2.13 (i) No, see Lemma 2.22. If H,J ≤ G and sH = tJ , thent ∈ sH, and so sH = tH which gives tH = tJ and t−1H = t−1J . HenceH = t−1HtH = t−1JtJ = J .
(ii) Suppose a ∈ G\H. We claim 〈a〉 = G. For if not, there exists a maximalsubgroup J satisfying 〈a〉 ≤ J < G, with possibly J = 〈a〉. But there is onlyone maximal subgroup by hypothesis, and so J = H and 〈a〉 ≤ H whichcontradicts our assumption that a 6∈ H. Note that the converse is false.
Problem � 2.14 (i) We have K ≤ H and g−1kg ∈ K for all g ∈ G andk ∈ K, so h−1kh ∈ K for h ∈ H and k ∈ K (as H ⊆ G), hence K / H.
(ii) If J ≤ Z(G) / G, then J ≤ G by Corollary 2.14. Also as J ⊆ Z(G),for g ∈ G and j ∈ J , we have gj = jg or g−1jg = j ∈ J . Hence J / G.
(iii)⋂Ki ≤ G by Theorem 2.15. Suppose g ∈ G and k ∈
⋂Ki. Then
k ∈ Ki for all i, and as Ki / G, we have g−1kg ∈ Ki, again for all i, henceg−1kg ∈
⋂Ki.
(iv) Note first e ∈ K∩H andK∩H ⊆ J∩H asK ⊆ J . HenceK∩H ≤ J∩Hby Corollary 2.14. For normality we have j−1kj ∈ K, for j ∈ J and k ∈ K(by hypothesis), so this also holds for j ∈ J ∩ H and k ∈ K ∩ H. Further,under the same conditions j, k ∈ H, and so j−1kj ∈ H (as H ≤ G). Hencej−1kj ∈ K ∩H and K ∩H / J ∩H.
Problem � 2.15 (i) By Lagrange’s Theorem (Theorem 2.27), o(G) =o(J)[G : J ] = o(H)[G : H] and o(J) = o(H)[J : H], so use substitution.
(ii) As H ∩ J ≤ H ≤ G we have by (i) [G : H ∩ J ] = [G : H][H : H ∩ J ],and similarly [G : H ∩ J ] = [G : J ][J : H ∩ J ]. These show that the LCM of[G : H] and [G : J ] divides [G : H∩J ]. Now if [G : H] and [G : J ] are coprime,then these equations give [G : H] = [J : H ∩ J ] and [G : J ] = [H : H ∩ J ].
Problem � 2.16 (i) We have [e, e] = e ∈ G′ and [a, b]−1 = [b, a], soG′ ≤ G as closure is given by definition. Also
g−1[a, b]g = g−1a−1gg−1b−1gg−1agg−1bg = [g−1ag, g−1bg]

Solutions 2 467
which gives normality.
(iia) Z′ = 〈e〉, the derived subgroup of an Abelian group is 〈e〉.(iib) If D3 = 〈a, b | a3 = b2 = e, bab = a2〉, then a−1b−1ab = a and
b−1a−1ba = a2 et cetera; hence D′3 = 〈a | a3 = e〉.(iic) We have [A,B] = [B,A] =
(−1 00 −1
)= C; so derived subgroup is 〈C〉.
(iii) For a, b ∈ G, we have a−1b−1ab ∈ J (as G′ ⊆ J), and so if a ∈ G andb−1 ∈ J then a−1bab−1 = j ∈ J , hence a−1ba = jb ∈ J , that is J / G.
(iv) If K 6≤ Z(G), then there exist g ∈ G and k, k′ ∈ K with g−1kg = k′
and k 6= k′. But then [g, k−1] = k′k−1 6= e, so K ∩G′ 6= 〈e〉.(v) As K / G, g−1kg ∈ K for g ∈ G and k ∈ K. Now if k−1g−1kg ∈ J and
g1 ∈ G, then g−11 (k−1g−1kg)g1 = (g−11 k−1g1)(g−11 g−1g1)(g−11 kg1)(g−11 gg1) ∈[K,G] = J . Hence J / G as J ≤ G by definition, and J ≤ K follows simi-larly. This property also be established by using the Correspondence Theorem(Theorem 4.16).
Problem 2.17 (i) [a, b]−1 = (a−1b−1ab)−1 = b−1a−1ba = [b, a].
(iia) Use induction several times. We have if r > 0, [ar+1, b]
= a−1a−rb−1ar(bb−1)ab = a−1[ar, b]b−1ab = a−1[a, b]rb−1ab = [a, b]r+1,
by Theorem 2.7(iv) and the hypothesis. Similarly for s > 0 we have[a, bs] = [a, b]s. For negative powers use [a−1, b] = [a, b]−1 et cetera, because[a−1, b][a, b] = a[a, b]b−1a−1b = e using given conditions.
(iib) Use induction, there is nothing to prove if t = 1. Main step:
(ab)t+1 = ab(ab)t = abatbt[b, a]t(t−1)/2
= at+1a−tbatb−1bt+1[b, a]t(t−1)/2
= at+1[at, b−1]bt+1[b, a]t(t−1)/2
= at+1bt+1[b, a]t(t+1)/2.
Note that by (i) and (iia) [b, a]t = [at, b−1], and we use the given conditionsfor the last equation.
(iii) (b−1[a, c]b)[b, c] = b−1a−1c−1acbb−1c−1bc = b−1a−1c−1abc = [ab, c].Second part similar.
(iv) Expand out and cancel terms as in (iii).
(v) Use induction. First let m = 1. Clear if n = 1, so suppose true forn > 1. We have, using (g−1[h, j]g)−1 = g−1[j, h]g et cetera,
[a1, b1 · · · bn+1] = [a1, bn+1](b−1n+1[a1, b1 · · · bn]bn+1),
and by the inductive hypothesis this is a product of conjugates of commuta-tors (note bn+1 ∈ H). The general case follows similarly.
(vi) Let hi ∈ H, ji ∈ J . By the results above we have

468 Solution Appendix Answers and Solutions to Problems
h−12 [h1, j1]h2 = [h1h2, j1][h2, j1]−1 ∈ [H,J ],
j−12 [h1j1]j2 = [h1, j2]−1[h1, j1j2] ∈ [H,J ].
If g ∈ [H,J ], then g = c1 . . . cn where ci = [ai, bi]s for s = ±1, ai ∈ H
and bi ∈ J . The equations above show that d−1cd ∈ [H,J ] if d ∈ H ord ∈ J . Hence as G = 〈H,J〉, we see that g−1cg ∈ [H,J ] for all g ∈ G givingnormality.
Problem � 2.18 (i) Show first A(B∩C) ⊆ B∩(AC). For if gh ∈ A(B∩C)where g ∈ A and h ∈ B ∩ C, then gh ∈ AB = B as A ≤ B and gh ∈ AC,and so gh ∈ B ∩ (AC). Conversely, if j ∈ B ∩ (AC), then j = ac ∈ AC wherea ∈ A and c ∈ C. This gives a−1j = c ∈ B ∩ C (as A ≤ B and j ∈ B).Hence j ∈ A(B ∩ C) because a−1 ∈ A. Result follows as this holds for allj ∈ B ∩ (AC).
(ii) Use (i).
(iii) We have B = B∩(BC) [as B ⊆ BC] = B∩(AC) = A(B∩C) [by (i)] =A(A ∩C) = A [as A ∩C ⊆ A]. Note that if G is finite this result can also beproved using Problem 2.27 or Theorem 5.8.
(iv) This follows from (i), for using the given conditions we haveAB∩CD =A(B ∩ CD) = AC(B ∩D).
Problem � 2.19 (i) If [G : H] = 2, there are two cosets, one of which isH. So G = H ∪ aH = H ∪Hb with disjoint unions, for all a, b ∈ G\H, henceaH = G\H = Hb for all a, b 6∈ H; that is H / G.
Second part. Choose a 6∈ H, so a ∈ bH for some b 6∈ H. If a2 6∈ Hthen a2 ∈ bH, hence ab−1 = h1 and a2b−1 = h2 where hi ∈ H. These givea = h2h
−11 ∈ H, a contradiction, see Lemma 2.22.
(ii) By Lagrange’s Theorem (Theorem 2.27), o(H) | o(G), hence o(G)/o(H)≥ 2 if H 6= G. For second part use (i).
(iii) Let G = D4 = 〈a, b | a4 = b2 = e, bab = a3〉. By (i) H = 〈a2, b〉 / Gand J = 〈b〉 / H. But J is not normal in G because a−1ba = a2b 6∈ J .
(iv) The result is obvious if H ⊆ J or J ⊆ H. Suppose all elementsof G belong to H or J . Let h ∈ H\J and j ∈ J\H. Now hj ∈ G, sohj ∈ H or hj ∈ J by supposition. If the former case holds, hj = h′ ∈ H soj = h′h−1 ∈ H, impossible; argue similarly in the second case. If G is finite,then a second proof is: o(H), o(J) ≤ o(G)/2 by (ii). As e ∈ H and e ∈ J , wehave o(H ∪ J) < o(G), hence there is an element in G not in H ∪ J .
(v) As HJ = JH, every term hj, h ∈ H and j ∈ J can be written in theform j′h′ where j′ ∈ J and h′ ∈ H. Now use Theorem 2.13.
Problem 2.20 (i) o(G) = 4. By Lagrange’s Theorem (Theorem 2.27), ife 6= a ∈ G, then o(a) = 2 or 4. If o(a) = 4 then the elements of G area, a2, a3 and a4 = e, and the group is cyclic with generator a. Otherwise allnon-neutral elements have order 2, and so the group is Abelian by Corollary2.20. Hence if a and b are two of these elements, the third is ab where ba = ab,and the group is isomorphic to T2, a product of two cyclic groups of order 2.

Solutions 2 469
(ii) o(G) = 6. As above the non-neutral elements have orders 2, 3 or 6.Also, by Problem 2.8(i), G contains at least one element of order 2, a say. Ifall non-neutral elements have order 2, then as in the second part of (i), G isAbelian and there exist order two elements b, c ∈ G. But then ab, ac, bc andabc all belong to G, and are distinct, which gives at least eight elements inG which is impossible.
Hence G contains an element of order 3 or 6, but if o(b) = 6 then o(b2) = 3;therefore G contains an element c, say, of order 3. If G does contain anelement of order 6, then G is cyclic (see (i)). Hence we may suppose, if G isnot cyclic, then G contains e, a (of order 2), and c, c2 (both of order 3). ByProblem 2.19(i), 〈c〉 / G, and so
a−1ca = aca ∈ 〈c〉 which gives aca = e, c or c2.
If aca = e then c = a2 = e which is impossible. If aca = c then ac = ca,o(ac) = 6 (note acac = c2, (ac)3 = a, et cetera), and G is cyclic as above.Hence we may assume that aca = c2, or equivalently ca = ac2. This furthershows that c2a = cac2 = ac4 = ac. Therefore G contains the 6 elementse, a, c, c2, ac = c2a and ac2 = ca, and G is isomorphic to the dihedral groupD3.
Problem 2.21 Suppose first n = 2. Define a map θ from the set of leftcosets of H1 ∩H2 in G to the set of pairs whose first entry is a left coset ofH1, and second entry is a left coset of H2 by
(x(H1 ∩H2))θ = (xH1, xH2).
This is well-defined by Lemma 2.22, and if (xH1, xH2) = (yH1, yH2) thenxH1 = yH1, xH2 = yH2, so x−1y ∈ H1 and x−1y ∈ H2, and hence x−1y ∈H1 ∩ H2 and x(H1 ∩ H2) = y(H1 ∩ H2) by Lemma 2.22 again. Therefore θis injective which gives result as [G : H1 ∩H2] is the number of left cosets ofH1 ∩H2 in G. The general result follows from this by induction. Note thatby Problem 2.15 we have equality in this expression if [G : H1] and [G : H2]are coprime integers.
Problem 2.22 Use Theorem 2.15, Problem 2.21.
Problem � 2.23 (i) e = g−1eg ∈ g−1Hg, so the set is not empty. Alsoif a, b ∈ g−1Hg, then a = g−1hg, b = g−1jg for h, j ∈ H, and a−1b =g−1h−1jg ∈ g−1Hg, so the subgroup conditions are satisfied.
(ii) Define a map θ : H → g−1Hg by hθ = g−1hg for h ∈ H, this is abijection which gives result.
(iii) If j ∈ g−1Hg, then j = g−1hg for some h ∈ H and so gjg−1 = h ∈ H.This shows that
g−1Hg ⊆ {j ∈ G : gjg−1 ∈ H}.
For the converse, if k belongs to the RHS then gkg−1 = h ∈ H whichgives k = g−1hg, and so the opposite inclusion also follows.

470 Solution Appendix Answers and Solutions to Problems
Problem � 2.24 (i) By (i) in Problem 2.23 and Theorem 2.15,
core (H) =⋂
g∈Gg−1Hg ≤ G.
Normality. Suppose x ∈ G and a ∈ core(H), so a ∈ g−1Hg for all g ∈ G.We have x−1ax = (gx)−1h(gx) for h ∈ H, that is x−1ax equals a conjugateof h by an element (gx) in G. This holds for all g ∈ G, and so x−1ax ∈⋂g∈G g−1Hg, and hence core(H) / G.
(ii) Note core(H) ⊆ H by definition. If J ≤ H and J / G then g−1Jg ⊆g−1Hg, for all g ∈ G, hence J ≤ core(H).
(iii) This follows from (ii) for if there were two distinct maximal normalsubgroups we could form their join which would contain both of them; seeTheorem 2.30.
Problem 2.25 (i) This follows from Problem 2.14(iii).
(ii) Let K = 〈g−1Hg | g ∈ G〉. As H ≤ H∗ and H∗ / G, if g ∈ G andh ∈ H, then g−1hg ∈ H∗, hence K ≤ H∗ by closure in H∗. Conversely notefirst that K / G. For K ≤ G by definition, and if j ∈ G, then for i = 1, 2, . . . ,g−1i higi ∈ K, and so j−1(g−1i higi)j = (gij)
−1hi(gij) ∈ K as gij ∈ G; thisgives normality. But H∗ is the intersection of all normal subgroups containingH, hence H∗ ≤ K and equality follows.
(iii) Use the same method as in the proof of Theorem 2.17.
Problem 2.26 (i) Z(Z) = Z, the centre of an Abelian group is the groupitself.
(ii) Suppose D4 = 〈a, b | a4 = b2 = (ab)2 = e〉. Neither a nor a3 commutewith b, so a, a3, b 6∈ Z(D4), but a2 commutes with a and b. Hence Z(D4) ={e, a2}, a cyclic group of order 2.
(iii) Z(D5) = 〈e〉, no power of a commutes with b.
(iv) If A =(a bc d
)∈ Z(GL2(Q)), X =
(x yz t
)∈ GL2(Q), then
AX =
(ax+ bz ay + btcx+ dz cy + dt
)=
(xa+ yc xb+ ydza+ tc zb+ td
)= XA,
and so ax+ bz = xa+ yc or bz = cy, for all y, z ∈ Q, which gives b = c = 0.We also have ay+ bt = xb+yd, or y(a−d) = b(x− t) = 0, which gives a = d.Hence Z(GL2(Q)) is the set of scalar matrices
(a 00 a
)where a ∈ Q and a 6= 0.
(v) Z(S3) = 〈e〉, no non-neutral element commutes both with two andwith three cycles.
Problem 2.27 Let Y = {(ha, a−1j) : a ∈ H ∩ J}. As haa−1j = hj = g,we have gθ−1 ⊆ Y . Now if (hi, ji) ∈ gθ−1, i = 1, 2 and h1j1 = g = h2j2,then h−11 h2 = j1j
−12 = a, say, where a ∈ H ∩ J . This gives h2 = h1a and
j2 = a−1j1, and so gθ−1 ⊇ Y . Also (ha, a−1j) = (hb, b−1j) implies a = b bycancellation. Therefore o(gθ−1) = o(H ∩ J), that is o(gθ−1) is independentof g. The result follows.

Solutions 2 471
Problem � 2.28 Let J be the subgroup of G generated by all involutionsin G, we have o(J) > 1 by the quoted problem. If g ∈ G and o(J) = 2, then(g−1jg)2 = g−1j2g = e, and so g−1jg has order 2 and therefore belongs to J .Secondly if o(j1) = o(j2) = 2, then g−1j1j2g = (g−1j1g)(g−1j2g), a productof elements of order 2. Hence J / G, but G is simple, and so J = G. Notethat the result also applies for infinite groups.
Problem 2.29 (i) and (ii) Clearly a ∈ HaJ , and if b ∈ HaJ , then b = haj(h ∈ H, j ∈ J) and HbJ = HhajJ = HaJ .
(iii) Use: If Haj1 = Haj2, then h ∈ H exists satisfying aj1 = haj2 (ji ∈ J)or j1j
−12 = a−1ha ∈ a−1Ha as j1j
−12 ∈ J clearly holds.
(iv) Use (ii) and (iii).
(v) Two double cosets: 〈(1, 2, 3)〉(1, 2)〈(1, 2, 3, 4)〉 ={(1, 2), (1, 3), (2, 3), (1, 2, 4), (1, 3, 4), (1, 4)(2, 3), (1, 3, 2, 4), (1, 4, 2, 3), (2, 4),
(1, 4, 3), (2, 4, 3), (1, 2)(3, 4)},and
〈(1, 2, 3)〉(1, 2)〈(1, 4)(2, 3)〉 = {(1, 2), (1, 3), (2, 3), (1, 4), (1, 2, 3, 4), (1, 3, 2, 4)}.
Problem 2.30 (i) e ∈ J1 so e ∈ J ; if j ∈ J , then for some i we havej ∈ Ji, so j−1 ∈ Ji ≤ J ; and if j, k ∈ J , then j ∈ Ji1 and k ∈ Ji2 , so ifi = max(i1, i2), then j, k ∈ Ji ≤ J .
(ii) Suppose K/ J and Ji is simple. By Problem 2.14(iv) we have K∩Ji/ Ji,so either K ∩ Ji = 〈e〉 which can only happen if K = 〈e〉, or Ji ≤ K. But asJi is simple for infinitely many i, this gives J ≤ K.

472 Solution Appendix Answers and Solutions to Problems
Solutions 3
Problem � 3.1 (i) We have (1, k)(1, j)(1, k) = (j, k) if j 6= k and j, k ≥ 2,now use Lemma 3.5.
(ii) For j > 1, use (1, j)(j, j + 1)(1, j) = (1, j + 1), induction, and (i); seeProblem 3.21.
(iii) For j > 1 we have (1, 2, . . . , n)−1(1, j)(1, 2, . . . , n) = (2, j + 1) and(2, j + 1)(1, 2)(2, j + 1) = (1, j + 1), now use (i) and induction.
(iv) If i, j, k and l are distinct, use (i, j)(k, l)(i, j)(k,m) = (k, l,m) andTheorem 3.12.
Problem 3.2 If σ = (1, 2, 3)(4, 5, 6) and α = (1, 2, 3, 4, 5, 6) then
α−1σα = (1, 5, 6)(2, 3, 4) = τ.
There are 17 further solutions α to σα = ατ , they are:
(1,4), (2,5)(3,6), (1,2,3,4), (1,3,2,4), (1,4,5,6), (1,4,6,5), (1,5,2,6,3),(1,6,3,5,2), (2,5,3,6,4), (2,5,4,3,6), (2,6)(1,5,4,3), (3,5)(1,6,4,2),(1,5,3)(2,6,4), (1,6,2)(3,5,4), (1,2,3,4,5,6), (1,3,2,4,5,6),(1,2,3,4,6,5), and (1,3,2,4,6,5).
Problem � 3.3 Use Theorem 3.6. (i) We have S3(' D3) has three classes:{e}, {(1, 2), (1, 3), (2, 3)} and {(1, 2, 3), (1, 3, 2)}.
(ii) S4 has five classes: {e}, six 2-cycles, eight 3-cycles, six 4-cycles, andthree 2-cycle by 2-cycles.
(iii) S5 has seven classes: {e}, ten 2-cycles, twenty 3-cycles, thirty 4-cycles,twenty-four 5-cycles, fifteen 2-cycle by 2-cycles, and twenty 2-cycles by 3-cycles making 120 elements in all.
For the alternating groups we argue as follows. We have, for example,
(1, 2, 3)(1, 2)(3, 4)(1, 3, 2) = (1, 3)(2, 4)
and (3, 4, 5)(1, 2)(3, 4)(3, 5, 4) = (1, 2)(3, 5); these and similar identities showthat products of two distinct 2-cycles are conjugate in alternating groups Anfor n ≥ 4. Hence we have:
(iv) As A3 is Abelian, it has three singleton conjugacy classes: {(1, 2, 3)},{(1, 3, 2)} and {e}.
(v) A4 has four conjugacy classes: {e}, two, each containing four 3-cycles, and one containing three 2-cycle by 2-cycles (see above). Theo-rem 5.19 shows that the number of conjugates of an element in G di-vides o(G), and so the eight 3-cycles cannot form a single conjugacy class.By direct calculation the classes are: {(1, 2, 3), (1, 4, 3), (1, 2, 4), (2, 4, 3)} and{(1, 3, 2), (1, 3, 4), (1, 4, 2), (2, 3, 4)} (note 4 | 12).
(vi) A5 has five classes: {e}, twenty 3-cycles, fifteen 2-cycle by 2-cycles,and two classes each containing twelve 5-cycles. All 3-cycles are conjugate byTheorem 3.12 (n > 4 in this result). The third claim follows as above, and
Solutions 3 473
the last statement is best proved using results from Section 5.2. But by directcalculation we see that the first class contains
(1,2,3,4,5), (1,2,4,5,3), (1,2,5,3,4),(1,3,4,2,5), (1,4,2,3,5) and (1,4,5,2,3),
and their inverses (so 12 in all), and the second class contains the remainingtwelve 5-cycles. Note that for each pair of conjugate 5-cycles there are fiveconjugating elements, so for example the conjugating elements for the pair(1, 2, 3, 4, 5) and (1, 2, 4, 5, 3) (that is σ : σ−1(1, 2, 3, 4, 5)σ = (1, 2, 4, 5, 3)) are(1, 3, 2), (3, 4, 5), (1, 4)(3, 5), (1, 2, 4, 3, 5) and (1, 5, 4, 2, 3).
(vii) A normal subgroup is a union of conjugacy classes one of which mustbe {e} (Theorem 2.29(ii)), also the order of a subgroup divides the order ofthe group by Lagrange’s Theorem. By (ii) possible orders for proper non-neutral normal subgroups are 1+3 (the neutral element and three 2-cycle by2-cycles) and 1+3+8 (the even permutations). Both of these form subgroupsof S4 because they are closed under products and inverses, and therefore arenormal.
(viii) Similarly the conjugacy classes of A4 have orders 1, 3 and 4 (twice),and o(A4) = 12, hence A4 has a normal subgroup of order 4 as in S4 above, itis often denoted by V . This is the only non-neutral proper normal subgroupof any alternating group.
Problem 3.4 (i) As σ and τ are disjoint, they apply to disjoint subsets ofthe underlying set N = {1, . . . , n} upon which Sn is acting. But τ−1 = σ andso if the cycle (a, b, . . . ) occurs in σ, the cycle (. . . , b, a) occurs in τ whichcontradicts the hypothesis.
(ii) No. For example let σ = (1, 2)(3, 4), τ = (5, 6) and ν = (1, 3); hereσν = (1, 2, 3, 4) and νσ = (4, 3, 2, 1).
(iii) σ has the form (i, iσ, iσ2, . . . ) and τ has the form (i, iτ, iτ2, . . . ). Socorresponding entries are equal, but do they have the same length? Yes, forif the length of σ is k and of τ is l, and k < l. Then iσk = i whilst iτk 6= i, acontradiction.
(iv) By Theorem 3.4 suppose σ = τ1 . . . τr where the τi are disjoint cycleswhich commute in pairs. So ι = σp = τp1 . . . τ
pr , and hence τps = ι for 1 ≤ s ≤ r.
If o(τs) = m < p, then we can find integers t, u to satisfy tp + um = 1(Euclidean Algorithm (Theorem B2)), and τs = τ tp+ums = ι. In this probleme and ι are synonymous.
Problem 3.5 If σ ∈ Sn, then σ = τ1τ2 . . . τr where each τi is a cycle oflength ti, say, and t1 + · · · + tr = n; note, some may be 1-cycles. Now theorder of a k-cycle is k, the order of a k-cycle by l-cycle is LCM(k, l) providedk + l ≤ n, et cetera. So the order of σ is LCM(t1, . . . , tr). For S7, the ordersare 1, 2, . . . , 7 (cycles and others, for example a 2-cycle × 2-cycle × 3-cyclehas order 6), 10 (2-cycle × 5-cycle), and 12 (3-cycle × 4-cycle).
For An we need the extra condition: 2 | ((t1−1)+ · · ·+(tr−1)). For A7 theorders are 1, 3, 5, 7 (cycles), 2 (2-cycle × 2-cycle), 3 again (3-cycle × 3-cycle),4 (2-cycle × 4-cycle), and 6 (2-cycle × 2-cycle × 3-cycle).

474 Solution Appendix Answers and Solutions to Problems
Problem 3.6 As q is prime it has a primitive root,m say. Let r = m(q−1)/p,then rp ≡ 1 (mod q) and rt 6≡ 1 (mod q) for 0 < t < p. With this choice ofr we have
1τ tr ≡ rt (mod q),
so the first p-cycle in τr is (1, r, r2, . . . , rp−1). Now suppose c is the smallestinteger not in this cycle, then (c, cr, cr2, . . . , crp−1) is the second p-cycle dis-joint from the first. Continue. Note that τr maps q to q. Now σq = τpr = e.Also τ−1r στr maps kr → k → k+ 1→ (k+ 1)r, so it maps q → 1, 1→ r+ 1,
et cetera, that is τ−1r στr = σr, which in turn gives σtτur = τur σrtu. So every
element of the group can be expressed as a power of τr followed by a powerof σ. Therefore, changing symbols, the group has the presentation
〈a, b | aq = bp = e, b−1ab = ar〉.
There are a number of choices for r but they all give rise to isomorphic groups.For example if we replace r by ru (modulo q), then we should also replace bby bu. Groups of this type are called Frobenius or metacyclic, see page 130.
Problem � 3.7 (i) In An+2 the set of permutations X which leave n+ 1and n + 2 fixed forms a copy of An (and so ‘half’ of Sn) in An+2. Secondly,if τ is an odd permutation in Sn then τ(n+ 1, n+ 2) is an even in An+2. LetY = {τ(n + 1, n + 2) : τ ∈ Sn, τ odd}, then X ∪ Y ≤ An+2. Show this bynoting that disjoint cycles commute (Theorem 3.4), and (n+ 1, n+ 2)2 = e.
(ii) Use the quoted facts and Problem 2.14(iv); note that the only subgroupof Sn with index 2 is isomorphic to An.
Problem 3.8 (i) We have θn/r = (a1, . . . , ar) . . . (d1, . . . , dr) = σ. Also, ifφ = (c1, . . . , cn) and k |n, φn/k = (c1, ck+1, . . . c(n−k)+1) . . . (ck, c2k, . . . , cn).This only works for divisors k of n.
(ii) This follows from (i), if n = p the only divisors are 1 or p.
Problem 3.9 (i) The problem is badly worded, it should ask for an esti-mate of the number of copies of Sk that occur in Sn. Let Y be a k-elementsubset of X = {1, . . . , n}, k ≤ n. The set of permutations which fix all ele-ments in X\Y clearly forms an isomorphic copy of Sk in Sn. There are
(nk
)choices for Y and so at least
(nk
)copies of Sk in Sn.
(ii) By (i) SY and SZ are subgroups of Sn (isomorphic to Sk and Sn−k,respectively). If σ1 and σ2 are perms. of Y , and τ1 and τ2 are perms. ofZ, then by Theorem 3.4 (σ1τ1)−1(σ2τ2) = σ−11 σ2τ
−11 τ2 ∈ SY × SZ . As
SY × SZ is not empty, it forms a subgroup of Sn. [By Theorem 7.3, it isalso a direct product. For SY ∩ SZ = e, and if θ, σ ∈ SY and τ ∈ SZ , then(στ)−1θ(στ) = τ−1(σ−1θσ)τ = σ−1θσ ∈ SY by Theorem 3.4 again. Thisshows that SY / SY × SZ et cetera.] For maximality show that the set gen-erated by SY , SZ and a suitably chosen 2-cycle in fact contains all 2-cycles,and then use Theorem 3.4 (note k 6= n− k).
(iii) By (ii), Sn × Sn is isomorphic to a subgroup of S2n of products ofperms. στ where σ is a perm. on Y = {1, . . . , n}, and τ is a perm. onZ = {n+ 1, . . . , 2n}. Let ξ = (1, n+ 1)(2, n+ 2) · · · (n, 2n) ∈ S2n.

Solutions 3 475
Now for example
ξστ =
(1 · · · n n+ 1 · · · 2n
(n+ 1)τ · · · (2n)τ 1σ · · · nσ
).
This shows that the group generated by ξ and the elements of Sn × Sn is asubgroup of the group of all perms. on Y ∪ Z, that is S2n. It is proper asthis subgroup has order 2(n!)2 < (2n)! when n > 1; note also this subgrouppreserves the partition of Y and Z whilst S2n does not. For example seeSection 8.1 where S4 is discussed, the subgroup generated by the order 2elements (1, 2), (3, 4) and (1, 3)(2, 4) has order 8, and is isomorphic to D4 inthis case; see page 156.
Problem � 3.10 (i) First consider the permutation representation. Ithas three elements of order 2: (1, 2)(3, 4), (1, 3)(2, 4), (1, 4)(2, 3), and eight el-ements of order 3: (1, 2, 3), (1, 3, 2), (1, 3, 4), (1, 4, 3), (2, 3, 4), (2, 4, 3), (1, 4, 2),(1, 2, 4) (written as inverse pairs). By direct calculation we see that any setcontaining an element of order 2 and an element of order 3 generates thewhole group, see Theorem 3.3.
Secondly we have, again by direct calculation, the elements of 〈a, b | a2 =b3 = (ab)3 = e〉 are
e; a, bab2, b2ab; b, b2, ab, b2a, ab2, ba, aba, bab,
the second, third and fourth have order 2, and the last eight have order 3.(For this use babab = a and ababa = b2 to show that abab = ab2 = b2a....)Hence both groups have order 12, and if we map a 7→ (1, 2)(3, 4) and b 7→(1, 2, 3), then we obtain an isomorphism. In this correspondence the two listsabove ‘agree’, so for example bab 7→ (1, 2, 4), and the isomorphism gives(ab2)(bab) = b and (2, 3, 4)(1, 2, 4) = (1, 2, 3) et cetera.
Note that in this problem by symmetry group we mean the rotationalsymmetry group; see Web Section 2.6. For the third group if we map arotation by π about the centres of opposite edges to a, and rotation by 2π/3about a line through a vertex and the centre of its opposite face to b, weobtain a one-to-one correspondence between groups (b) and (c). The readershould try this with a model of a tetrahedron.
(ii) By Lagrange’s Theorem (Theorem 2.27), non-neutral proper subgroupsof A4 can only have orders 2, 3, 4 or 6. It cannot have a subgroup of order6 as this would be normal, see Problems 3.3 and 2.19(i). It also cannot havea cyclic subgroup of order 4 as it contains no element of order 4. So thepossibilities are C2, C3 and T2. As A4 contains exactly three elements of order2, it has three subgroups of type C2, one for each element of order 2, and oneof type T2. This last subgroup is normal by Theorem 3.6. By Problem 3.3,A4 has four subgroups of type C3. None is normal, use Theorem 3.6 again,and see the Sylow theory in Chapter 6.
Problem 3.11 (i) In H we have a5 = b4 = e and ba2 = ab. So ba4 =ba2a2 = aba2 = a2b, ba = ba6 = ba4a2 = a2ba2 = a3b, and ba3 = ba8 =a3ba2 = a4b; hence bar = a3rb. Similarly b2a = bba = ba3b = a4b2 et cetera.

476 Solution Appendix Answers and Solutions to Problems
Hence bsar = a3srbs which shows that the group has 20 elements because
each expression in a and b can be replaced by one of the form arbs where0 ≤ r < 5 and 0 ≤ s < 4, and arbs = e implies r = s = 0. Construct a copywhich is a subgroup of S5 as follows. Let a 7→ σ = (1, 2, 3, 4, 5), so σ5 = e.Now look for a 4-cycle τ to satisfy στ = τσ2. We have a2 7→ (1, 3, 5, 2, 4), andso if we let b 7→
(2 3 4 5r s t u
), then
στ =
(1 2 3 4 52 3 4 5 1r s t u 1
)=
(1 2 3 4 51 r s t u3 · · · ·
)= τσ2,
This gives 1σ2 = 3, so r = 3 (bottom left-hand entries in the matrices above).As 3σ2 = 5 we have s = 5, and continuing we obtain t = 2 and u = 4. Henceτ : b 7→ (2, 3, 5, 4), and the representation is complete. Similar constructionsgive maximal subgroups of order 2n(2n + 1) in S2n+1. There is a maximalsubgroup of order 42 in S7 with presentation 〈σ, τ |σ7 = τ6 = e, στ = τσ3〉where
σ 7→ (1, 2, 3, 4, 5, 6, 7), τ 7→ (2, 4, 3, 7, 5, 6).
The reader should also refer to the last part of Web Section 6.5.
(ii) A5 has fifteen cyclic subgroups of order 2 (〈(1, 2)(3, 4)〉, . . . ), ten oforder 3 (〈(1, 2, 3〉, . . . ), and six of order 5 (〈(1, 2, 3, 4, 5)〉, . . . ); also five oftype T2 ' C2 × C2. By Problem 3.7, S3 ≤ A5, for instance the subgroupgenerated by (1, 2, 3) and (4, 5); there are ten copies of S3 in all; C6 is not asubgroup because A5 contains no elements of order 6. There are no subgroupsof order 7, 8 or 9 as these integers do not divide o(A5).
Problem 3.12 (i) Each row has one ‘1’ and n−1 zeros by definition, samefor columns as σ is a bijection on {1, 2, . . . , n}.
(ii) By definition det((ai,j)) is a sum of terms of form ±a1,1τa2,2τ . . . an,nτ ,one for each τ ∈ Sn. Each term is zero except when τ = σ, and this termequals ±1, and so the determinant equals ±1.
(iii) The inverse of a matrix in Pn is its transpose; In corresponds to theidentity permutation; and Pn is closed under matrix multiplication. HencePn ≤ GLn(F ). Not normal, for instance
(1 20 1
) (0 11 0
) (1 −20 1
)=(2 −31 −2
)6∈ P2.
(iv) A matrix corresponding to a 2-cycle is In with one pair of rows in-terchanged, so it has determinant −1. Hence, if σ is a product of an evennumber of 2-cycles (that is, it is even), then the determinant of the matrixcorresponding to σ is an even power of −1, that is 1.
Problem 3.13 (i)(−1 00 −1
), I2 and
(η5 00 η
).
(ii) D =(0 ii 0
).
(iii) The elements of the group are CtDu for 0 ≤ t ≤ 5 and 0 ≤ u ≤ 1,twelve in all. The group has the presentation 〈c, d | c6 = e, c3 = d2, d−1cd =c5〉 and this can be rewritten as 〈c, d | c3 = d2 = (cd)2〉; a presentation ofdicyclic group Q3, see pages 59 and 159.

Solutions 3 477
Problem 3.14 Suppose the 4-element field consists of {0, 1, c, c+1} wherec2 = c + 1 and we work modulo 2 (so 1 = −1). Let A =
(0 11 1
), then A2 =(
1 11 0
)and A3 = I2 giving an order 3 cyclic subgroup in GL2(2). Secondly,
for each 2× 2 matrix C ∈ GL2(4) we define a 4× 4 matrix C∗ ∈ GL4(2) asfollows: if 0 occurs in C replace it by the 2× 2 zero matrix
(0 00 0
), if 1 occurs
in C replace it by I2, if c occurs in C replace it by the 2×2 matrix A definedabove, and if c + 1 = c2 occurs in C replace it by A2. This defines a mapfrom GL2(4) to GL4(2), you need to check that all matrices C∗ constructedin this way have determinant 1.
Using the methods given in Chapter 4 we can show that this map is aninjective homomorphism, or the subgroup condition (Theorem 2.13) can beapplied. Note that we have o(GL4(2)) = 20160 and o(GL2(4)) = 180; seeChapter 12, especially Problem 12.13.
Problem � 3.15 If A = (aij), B = (bij) ∈ UTn(F ), then aij = bij = 0 ifi > j, and the (i, j)th term of AB is
aiibij + · · ·+ aijbjj , (3.1)
if i ≤ j. Also the subdiagonals of A−1 consist entirely of zeros, and thediagonal is
(a−111 , . . . , a−1nn); (3.2)
note that as A is non-singular, aii 6= 0, for i = 1, . . . , n. The first superdiag-onal of A−1 is
(−a12/a11a22, . . . ,−an−1,n/an−1,n−1ann), (3.3)
the second superdiagonal is((a12a23 − a13a22)/a11a22a33, . . . , (3.4)
(an−2,n−1an−1,n − an−2,nan−1,n−1)/an−2,n−2an−1,n−1ann
),
(note det((a bc d
)) = ad− bc) with similar expressions for the remaining super-
diagonals.
(i) By (3.1) above the diagonal of AB is (a11b11, . . . , annbnn), so use (3.2),and Theorems 2.13 and 2.29.
(ii) By (3.3), (3.4), . . . above, if the first r superdiagonals of A consistentirely of zeros, this also holds for A−1, so use again Theorems 2.13 and2.29.
(iii) If A ∈ ITn(F ) and a is an entry in A above the main diagonal, then itcan equal an arbitrary element in F . So in this case there are p choices, andas there are n(n − 1)/2 such entries, the order of ITn(F ) is pn(n−1)/2. Nowuse Theorem 3.15(iii) with q = p.
(iv) If the (r+ 1)st superdiagonal of IZTn,r(F ) (that is the first with non-zero elements) is a1,r+1, a2,r+2, . . . , an−r,n, then the (r+1)st superdiagonal of

478 Solution Appendix Answers and Solutions to Problems
IZTn,r(F )−1 is −a1,r+1, . . . ,−an−r,n. Use this to show by direct calculationthat the (r+1)st superdiagonal of the commutator mentioned in the problemconsists entirely of zeros.
Problem 3.16 The conjugacy classes of A5 have orders 1 (e), 12 (5-cycles,two classes), 15 (2-cycles × 2-cycles) and 20 (3-cycles). Including 1 the onlydivisors of 60 we can make using these integers are 1 and 60.
Problem 3.17 Suppose T = {a1/b1, . . . , ak/bk} is a generating set for Q(with addition). As this set is finite there exists a prime p which does notdivide b1, . . . , bk−1 or bk, and it easily follows that 1/p cannot be expressedas a sum of integer multiples of the elements of T .
Problem 3.18 One representation is as follows. Map a 7→ (1, 2, 3, 4) andb 7→ (1, 4, 2), then ab = (2, 3) and a4 = b3 = (ab)2 = e and so the given groupis a homomorphic image of S4 because we can construct all 2-cycles in S4
using (1, 2, 3, 4) and (1, 4, 2). Now the given group is a copy of S4 as it onlyhas 24 elements.
Using the relations a4 = b3 = e, a3 = bab and b2 = aba we see that theelements are
e (neutral element);
ab, ba, b2ab2, ab2a2b, a2ba3, a3ba2 (2-cycles);
a2, ba2b2, b2a2b (2-cycle by 2-cycles);
b, b2, a2b, a2b2, ba2, b2a2, aba, ab2a (3-cycles); and
a, a3, ab2, a3b, ba3, b2a (4-cycles).
For the second part we have, for example, if a = (1, 2, 3, 4) and b = (1, 2)then ab = (2, 3, 4), if a = (1, 2, 3) and b = (3, 4) then ab = (1, 2, 4, 3), ifa = (1, 2, 3) and b = (1, 3, 2, 4) then ab = (1, 4), if a = (1, 2) and b = (2, 3, 4)then ab = (1, 3, 2, 4), and if a = (1, 2) and b = (1, 4, 3, 2) then ab = (2, 4, 3).Hence all six permutations of the powers are possible.
Problem 3.19 (i) Let A =(a bc d
)∈ SL2(p) and A2 = I2. Then
a2 + bc = bc+ d2 = ad− bc = 1
and so a(a+ d) = 2, that is a+ d 6= 0. But also
b(a+ d) = c(a+ d) = 0,
hence b = c = 0 and a2 = d2 = 1. Now also a = d, and the equation a2 = 1has exactly two solutions a = 1 and a = p− 1 (see Theorem B10) which givethe scalar matrices in SL2(p). Note all equations are modulo p > 2.
(ii) Nine classes. We give a class representative followed in brackets by theorder of elements in the class and the size of the class: I2 (1,1),
(4 00 4
)(1,1),(
0 14 4
)(3,20),
(0 14 0
)(4,30),
(0 14 2
)(5,12),
(0 22 2
)(5,12),
(0 14 1
)(6,20),
(0 14 3
)(10,12),
and(0 22 3
)(10,12). Note two classes of order 5 and two of order 10, each with
twelve elements.

Solutions 3 479
(iii) Use the same method as in the solution of Problem 3.16.
(iv) If A =(0 14 1
), B =
(1 22 0
), C =
(2 11 1
)and D =
(0 14 0
), then 〈A,B〉 '
SL2(3), 〈C,D〉 ' Q5 and 〈B,D〉 ' Q3.
Problem � 3.20 (i) As c2 = d2 = e, the elements of D have the form
cdc . . . c = (cd)r1c, cdc . . . d = (cd)r2 ,
dcd . . . c = c2dcd . . . c = c(cd)r3c or dcd . . . d = c2dcd . . . c = c(cd)r4
for suitable choices of the ri. The first and fourth are self-inverse, whilstthe inverse of the second is c(cd)r2c, and the inverse of the third is (cd)r3 .Hence D is generated by c and cd. Clearly A,K ≤ D, and K / D becausec−1(cd)rc = (dc)r = (cd)−r et cetera. Also A ∩K = 〈e〉 for if c = (cd)r, thend(cd)r−1 = e which gives d = e and D = 〈c〉, a group of order 2.
(ii) Suppose o(cd) = n. If n = 1 then D = 〈c〉 ' C2, if n = 2 then D isAbelian and so is isomorphic to T2, if 3 ≤ n <∞ then D is a new presentationof the dihedral group Dn, and if n is infinite we obtain a new infinite groupD∞ called the infinite dihedral group.
Problem 3.21 (ia) Using Pj ,Pk and Qjk we have e = ajakajak and soajak = a2jakaja
2k = akaj for k < j − 1.
(ib) Also, using Rl,Pl and Pl+1, we have alal+1alal+1alal+1 = e and soal+1alal+1 = alal+1al.
(ii) Consider Hy. If y = e, then Hai = H if i < n (by definition of H),and Han ∈ Z. Secondly consider (Han . . . ar)ai, where 1 ≤ r ≤ n, there arefour cases.
(a) i < r − 1. By (ia) ai commutes with aj if j > i− 1, and so
(Han . . . ar)ai = Haian . . . ar = Han . . . ar
as ai ∈ H.
(b) i = r − 1. Here (Han . . . ar)ar−1 = Han . . . ar−1.
(c) i = r. By Pr we have (Han . . . ar)ar = Han . . . ar+1.
(d) i > r. By (ia) and (ib) and moving ai to lie between ai−1 and ai−2,
(Han . . . ar)ai = Han . . . ai+1(aiai−1ai)ai−2 . . . ar= Han . . . ai+1(ai−1aiai−1)ai−2 . . . ar = Hai−1an . . . ar= Han . . . ar.
Now count up to check that a permutation of Z has been constructed.
(iii) Using Pi,Qjk, (ia) and (ib) it follows that every element of G belongsto one of the cosets in Z, and so [G : H] ≤ n + 1 as Z has n + 1 elements.By the inductive hypothesis if we assume that o(H) ≤ (n)!, it follows byLagrange’s Theorem (Theorem 2.27) that o(G) ≤ (n+ 1)!.
(iv) Finally let ai 7→ (i, i + 1), for 1 ≤ i ≤ n. By Problem 3.1, the set

480 Solution Appendix Answers and Solutions to Problems
of perms. {a1, . . . , an} generates Sn+1. Now a2i = e as ai is a 2-cycle; ifk < j−1, (akaj)
2 = (k, k+1)(j, j+1)(k, k+1)(j, j+1) = e as disjoint cyclescommute; and if l < n, (alal+1)3 = (l, l+ 1, l+ 2)3 = e. This shows that G isa homomorphic image of Sn+1. But by (iii) o(G) ≤ o(Sn+1), hence we haveequality.
Problem 3.22 (i) The matrices satisfy Am = B2 = (AB)2 =(−1 00 −1
).
(ii) In Qm we have o(arb) = 4 for all r, so look at the powers of a.
(iii) Use the fact that the relations of Dm are am = b2 = (ab)2 = e.
Problem 3.23 The non-neutral elements are a, b, c, aba = cbc, bab =cac, aca = bcb, abab = bcbc = caca = (1, 2)(3, 4)(5, 6)(7, 8) (order 2),and ab, bc, ca, ba, cb, ac, abc = bca = cab = (1, 8, 2, 7)(3, 6, 4, 5), acb =(1, 7, 2, 8)(3, 5, 4, 6) = bac = cba (order 4), so o(F ) = 16. There are 23 sub-groups, 17 normal. The proper non-neutral subgroups are 〈abab〉 = F ′ ' C2;six further subgroups isomorphic to C2 not normal 〈a〉, . . . ; four isomor-phic to C4, 〈ab〉, . . . including 〈abc〉 = Z(F ); three isomorphic to C2 × C2,〈a, abab〉, . . . ; three isomorphic to C4 × C2, 〈ab, c〉, . . . ; three isomorphic toD4, 〈ab, a〉, . . . ; and one isomorphic to Q2 consisting e, abab and the six ele-ments of order 4. All are normal except those indicated. A presentation is asfollows, it is not unique,
〈a, b, c : a2 = b2 = c2 = e, abc = bca = cab〉.
See Problem 8.12.
Problem 3.24 The following matrices generate GL2(3) and have orders8, 2 and 3, respectively.(
0 11 1
),
(2 02 1
),
(1 01 1
).
Also in S8 we can set a 7→ (1, 2, 3, 4, 5, 6, 7, 8), b 7→ (2, 4)(3, 7)(6, 8) and c 7→(2, 7, 8)(3, 4, 6). As noted in the statement of the problem, these solutions arein no way unique. For the presentation you need to show that each of itselements can be written in the form arbsct for 0 ≤ r < 8, 0 ≤ s < 2, and0 ≤ t < 3, and if arbsct = e then r = s = t = 0.

Solutions 4 481
Solutions 4
Problem 4.1 (ia) We have aθ = cos a+i sin a = eia, so (a+b)θ = ei(a+b) =eiaeib = aθbθ. (ib) Same as (ia), isomorphism as (ln2 a)φ2 = 2ln2 a = a, forall a ∈ R+. (ic) (a+ b)φ3 = −a− b = aφ3 + bφ3, an automorphism.
(ii) As aφ = e for all a ∈ G, (a+ b)φ = e = ee = aφbφ.
(iii) Use Lemma 3.8.
(iv) This follows as det(AB) = detA detB for A,B ∈ GL2(F ).
(v) The map f : R2 → R given by f(x, y) = x satisfies f(x1+x2, y1+y2) =x1 + x2 = f(x1, y1) + f(x2, y2).
Problem 4.2 (i) GL2(2) = {I2 =(1 00 1
), A1 =
(0 11 0
), A2 =
(1 10 1
), A3 =(
1 01 1
), B1 =
(0 11 1
), B2 =
(1 11 0
)} with matrix multiplication modulo 2. We
have A21 = A2
2 = A23 = B3
1 = B32 = I2. Define θ1 : GL2(2)→ S3 by
(0 11 1
)θ1 =
(1, 2, 3) and(0 11 0
)θ1 = (1, 2), and check by cases that (AB)θ1 = Aθ1Bθ1 for
the map is clearly bijective.
(ii) We have F1 = F\{1} with operation a ∗ b = a+ b− ab. It is closed, forif a+ b− ab = 1 then (1− a)(1− b) = 0 but 1 6∈ F1; the neutral element is 0;the inverse of a is a/(a− 1); and it is associative because
(a+ b− ab) + c− (a+ b− ab)c = a+ b+ c− ab− ac− bc+ abc
= a+ (b+ c− bc)− a(b+ c− bc).
Define θ2 : F ∗ → F1 by aθ2 = 1− a. This is clearly bijective and (a ∗ b)θ2 =1− (a+ b− ab) = (1− a)(1− b) = aθ2bθ2.
(iii) A polynomial f(x) has the form a0 + a1x+ · · ·+ akxk where ai ∈ Z,
and an element m ∈ Q+ has the prime factorisation pa00 pa11 . . . pakk again with
ai ∈ Z, and where pi is the i-th prime number with p0 = 2. So we candefine a map θ3 from polynomials f(x) to rational numbers m by: The zeropolynomial is mapped to 1, and (a0 + a1x+ · · ·+ akx
k)θ3 = pa00 pa11 . . . pakk . If
f1(x) = a′0 + · · · , then
(f(x) + f1(x))θ3 = ((a0 + a′0) + . . . )θ3
= pa0+a
′0
0 · · · = pa00 . . . pa′00 . . .
= f(x)θ3f1(x)θ3.
Problem 4.3 (i) If g, h ∈ G, (g ◦ h)(φψ) = ((gh)φ)ψ = (gφhφ)ψ [φ is ahomomorphism] = (gφ)ψ(hφ)ψ [ψ is a homomorphism] = (g(φψ))(h(φψ)).
(ii) As eφ = e, e ∈ im(φ), and if a, b ∈ im(φ) there exist a1, b1 satisfyinga1φ = a and b1φ = b. This gives a−11 φ = a−1 and a−1b = a−11 φb1φ = a−11 b1φ,that is a−1b ∈ im(φ).
(iii) We have abφ = aφbφ when a, b ∈ H, and so ab ∈ H, that is φ′ iswell-defined, and it is a homomorphism because φ is a homomorphism.

482 Solution Appendix Answers and Solutions to Problems
(iv) The map φ is an isomorphism, and so it is a bijection, henceφ−1 is also a bijection, see Appendix A. If aφ = a1 and bφ = b1 thena1φ−1 = a, b1φ
−1 = b and ab = a1φ−1b1φ
−1. But abφ = aφbφ = a1b1 soab = (a1b1)φ−1.
(v) Each element x ∈ X can be written in the form x = gθ for someg ∈ G, and different g give rise to different x. Define an operation on X by: Ifx1 = g1θ and x2 = g2θ, then x1x2 = g1θg2θ = g1g2θ. This gives the set X agroup structure, and the four basic axioms for this new group follow directlyfrom those for G.
Problem 4.4 (i) If C =(a bc d
), X =
(x yz w
)and CX = XC for all matrices
X, then b = c = 0 and a = d = 1 or 2; hence o(Z(G)) = 2.
(ii) A transversal (that is a list of coset representatives) is I2 and {Ci}, fori = 2, . . . , 12, where C2 =
(0 12 0
), C3 =
(0 12 1
), C4 =
(0 12 2
), C5 =
(1 01 1
), C6 =(
1 02 1
), C7 =
(1 10 1
), C8 =
(1 11 2
), C9 =
(1 12 0
), C10 =
(1 20 1
), C11 =
(1 21 0
), and
C12 =(1 22 2
).
(iii) If C1 =(2 00 2
), then C2
2 = C28 = C2
12 = C1, C34 = C3
5 = C36 = C3
7 =
C310 = I2, and C3
3 = C39 = C3
11 = C1. Three elements of order 2 and eight oforder 3.
(iv) If C is the coset containing C2 and D contains C5, then using cosetproduct we have: C3 = D2 = (CD)3 = I2 where CD is the coset containingC9, now use Problem 3.10(b) and see Section 7.3.
Problem � 4.5 (i) If φ is a homomorphism, gφ = g−1 and hφ = h−1, theng−1h−1 = gφhφ = (gh)φ = (gh)−1 = h−1g−1. This holds for all g, h ∈ G, soG is Abelian; now reverse argument.
(ii) Let X = {a−1(aθ) : a ∈ G}. Suppose a−1(aθ) = b−1(bθ). This givesba−1 = bθ(aθ)−1 = bθ(a−1θ) = (ba−1)θ, as θ is a homomorphism. By condi-tions (a) and (b) this shows that ba−1 = e, that is a = b. Hence o(X) = o(G),so X = G, as G is finite, and each element of G can be written in the formof the product a−1(aθ) for some a ∈ G.
Let g ∈ G, so by above there exists a ∈ G such that g = a−1(aθ).Now gθ = (a−1(aθ))θ = (a−1)θaθ2 = (a−1θ)a (by hypothesis), and g−1 =(a−1(aθ))−1 = (aθ)−1(a−1)−1 = (a−1θ)a (as θ is a homomorphism). Hencegθ = g−1 for all g ∈ G, and so by (i) G is Abelian.
Problem � 4.6 (i) As G is Abelian, if a, b ∈ G then aHbH = abH =baH = bHaH. This also follows from the Third Isomorphism Theorem (The-orem 4.17).
(ii) See Problem 2.16. G/K exists as K/G. If G/K is Abelian and a, b ∈ G,then abK = aKbK = bKaK = baK and [a, b] = a−1b−1ab ∈ K. This givesG′ ≤ K. Now reverse the argument for the converse using K / G.
(iii) As Sn/An is Abelian, S′n ⊆ An by (ii), and for the converse note thateach 3-cycle can be written as a commutator: (i, j, k) = [(i, k), (i, k, j, l)]. Aseparate adhoc argument is needed when n < 4.

Solutions 4 483
(iv) We haveJ / G and H2 / H1. (4.1)
For j, j′ ∈ J and h, h′ ∈ H2 we have (jh)−1(j′h′) = h−1(j−1j′)h′, by (4.1) andthere exists h′′ ∈ H2 satisfying h−1(j−1j′) = (j−1j′)h′′. Now use Theorem2.13. So JH2 ≤ JH1 ≤ G.
For normality we need to show that a = (jh1)−1j′h2(jh1) ∈ JH2 whereh1 ∈ H1, h2 ∈ H2 and j, j′ ∈ J . By (4.1) if g ∈ G and j ∈ J we can findj1 ∈ J to satisfy gj = j1g, and so applying this twice, first with g = h−11 ,then with g = h−11 h2, we have
a = (h−11 j−1j′h2)jh1 = j1(h−11 h2)jh1 = j1j2h−11 h2h1,
for suitably chosen j1 and j2 in J . Hence JH2 / JH1 follows by (4.1). NowJH1/JH2 = JH2H1/JH2 [as H2 ≤ H1] = H1/(H1 ∩ JH2) [by the SecondIsomorphism Theorem (Theorem 4.15)] = (H1/H2)/((H1∩JH2)/H2), by theThird Isomorphism Theorem (Theorem 4.17). Now use (i).
Problem 4.7 (i) We have gnK = (gK)n = K, so gn ∈ K.
(ii) Integers r and s exist satisfying rm + sn = 1, so g = grmgsn butgn ∈ K by (i) and gm ∈ K by hypothesis, hence g ∈ K.
Problem 4.8 (i) Use Problem 4.6(ii).
(ii) Use the definition.
Problem � 4.9 (i) For n > 0 use induction as an+1θ = anθaθ, and forn < 0 use Lemma 4.4.
(ii) First show θ′ is well-defined using: If aK = bK then a−1bθ = e,so aθ = bθ. The factor group G/K exists by definition, and (aKbK)θ′ =(abK)θ′ = abθ = aθbθ = (aK)θ′(bK)θ′.
(iii) Use [j1, j2]θ = (j−11 j−12 j1j2)θ = [j1θ, j2θ] for j1, j2 ∈ J , and Lemma4.3(ii).
Problem 4.10 (i) Define θ : G → G by gθ = gn, g ∈ G, this is a homo-morphism by given condition. The kernel is Gn = {g ∈ G : gn = e} / G, andthe image is Gn = {gn : g ∈ G} ≤ G, see Lemma 4.3 and Theorem 4.2(ii).Also
g−1ang = g−1agg−1ag . . . g−1ag = (g−1ag)n
for all a, g ∈ G, so Gn / G. By the First Isomorphism Theorem (Theorem4.11), we have G/Gn ' Gn, hence o(Gn) = o(G/Gn) = [G : Gn] by Theorem2.27.
(ii) If n = 2 then abab = a2b2, or ba = ab. If n = 3 then ababab = a3b3,and so (ba)2 = a2b2. This gives
a3b2 = a(a2b2) = ababa = (ab)2a = b2a3.
But o(a) is not divisible by 3, as 3 - o(G), and so we can choose c ∈ G tosatisfy c2 = a3. Now use first part as this applies for all a, b ∈ G.

484 Solution Appendix Answers and Solutions to Problems
Problem � 4.11 Suppose K,K1 / G, o(K)(= o(K1)), and K 6= K1. Sothere is k ∈ K1\K. Using the natural map G → G/K, the CorrespondenceTheorem (Theorem 4.16) gives G/K ≥ KK1/K > 〈e〉. But the Second Iso-morphism Theorem (Theorem 4.15) gives
KK1/K ' K1/(K ∩K1), hence o(K1/(K ∩K1)) | [G : K].
If K 6= K1, then o(K1/(K ∩K1)) is a proper divisor of o(K1) = o(K), that iso(K) and [G : K] have a common factor larger than 1 contrary to assumption.
Problem 4.12 For g, h ∈ G, using the coset and direct products we have
ghθ = (ghK1, . . . , ghKn)
= (gK1hK1, . . . , gKnhKn) = (gK1, . . . , gKn)(hK1, . . . , hKn)
= gθhθ.
The kernel is the set of g which satisfy gKi = Ki for all i, that is g ∈⋂ni=1Ki,
and so the result follows by Corollary 4.12.
Problem � 4.13 (i) – Theorem 4.16(ii). We have Hθ ≤ G2 by (i) ofTheorem 4.16. As K / G1, if g ∈ G1 and k ∈ K, we have g−1kg = k1 ∈ Kand g−1kgθ = (gθ)−1kθgθ = k1θ. But θ is surjective, so every element of G2
has the form gθ for some g ∈ G1, hence Hθ / G2.
Secondly, define a map ψ : G1 → G1/Hθ by gψ = (gθ)Hθ for g ∈ G1.The map ψ is surjective because θ is surjective, and it is a homomorphismbecause
ghψ = (ghθ)Hθ = (gθ)(hθ)Hθ = (gθ)Hθ(hθ)Hθ = gψhψ.
The kernel is H, for if h ∈ H then hθ ∈ Hθ. Hence by the First IsomorphismTheorem (Theorem 4.11)
G1/ kerψ = G1/H ' G2/Hθ.
(i) – Theorem 4.16(iii). If a, b ∈ Jθ−1, there exist x, y ∈ J satisfyingx = aθ and y = bθ. Now J ≤ G2 so x−1y ∈ J, (aθ)−1bθ ∈ J, (a−1b)θ ∈ J ,and so finally a−1b ∈ Jθ−1. Hence Jθ−1 ≤ G1 as e ∈ Jθ−1. Clearly K ⊆ Jθ−1therefore K ≤ Jθ−1 by Corollary 2.14.
(ii) Let θ be the natural homomorphism G → G/K, it is surjective withkernel K; so the Correspondence Theorem applies. Now G/K is simple, so Ghas no normal non-neutral subgroup J satisfying K < J < G. Conversely, ifno such J exists, then G/K has no non-neutral proper normal subgroup.
(iii) By (ii) G/H is simple. Suppose it is not cyclic of prime order, sothere exists J/H such that 〈e〉 < J/H < G/H, and by the CorrespondenceTheorem H < J < G which is impossible as H is maximal. For the requiredexample let G = S5 and H = 〈(1, 2, 3, 4, 5), (2, 3, 5, 4)〉; see Problem 3.11. NowH is maximal (use a computer check, or see Problem 3.9) and [G : H] = 6,but H is not normal; for example (1, 2)(1, 2, 3, 4, 5)(1, 2) = (1, 3, 4, 5, 2) 6∈ G,and also 6 is not prime!

Solutions 4 485
(iv) If homomorphism ξ exists with φ = θ ◦ ξ, then Kφ = e and so K ⊆kerφ. Conversely ξ is well-defined by Lemma 2.22, and it is a homomorphism(use coset product and the fact that φ is a homomorphism). This gives ker ξ =G/K. Now using the First Homomorphism Theorem we have
G/ kerφ = Gφ ' (G/K)ξ ' (G/K)/(kerφ/K).
Problem 4.14 (i) The map ξ is well-defined, for if aJ = bJ then a ∈ bJ ⊆bK, and so aK = bK by Lemma 2.22. Now ξ is surjective by definition, andit is a homomorphism because
(aJbJ)ξ = (abJ)ξ = abK = aKbK = (aJξ)(bJξ)
using coset product. Also ker ξ = {aJ : (aJ)ξ = aK = K}, that is aJ ∈ ker ξif, and only if, a ∈ K. Hence as J ⊆ K we have ker ξ = K/J .
(ii) Use (i) and the First Isomorphism Theorem (Theorem 4.11).
Problem 4.15 (i) o(G) = pn. If n = 1 the result follows by Lagrange’sTheorem (Theorem 2.27), so suppose it holds for Abelian groups of order pmwhere m < n. Let a ∈ G with o(a) = t. If p | t, then o(at/p) = p, so we maysuppose p - t.
Now 〈a〉 / G and G/〈a〉 is an Abelian group of order pn/t. As p - t, wehave t |n, so n = tn1 for some integer n1 < n, and o(G/〈a〉) = pn1. By theinductive hypothesisG/〈a〉 contains an element c of order p. This shows, usingthe Correspondence Theorem, that G contains an element b whose order is amultiple of p. Now apply the first case again.
(ii) If H = 〈a〉 and J = 〈b〉, we have o(ab) = mn and so G ' 〈ab〉.(iii) Example. Let G = D3 = 〈a, b | a3 = b2 = (ab)2 = e〉, H = 〈a〉 and
J = 〈b〉. The subgroups H and J are prime order cyclic, and G is not cyclic.But of course J is not normal.
Problem � 4.16 (i) Example. Let G = S5, H ' S3 defined on the set{1, 2, 3} and J be the group generated by H and the 2-cycle (4, 5), so J 'S3 × C2 see Chapter 7. Here Z(H) = Z(G) = 〈e〉 but Z(J) = 〈(4, 5)〉 ' C2;see Problem 7.4(i).
(ii) Suppose G/Z(G) is cyclic, so left cosets have the form atZ(G) for t ∈ Zand some fixed a ∈ G. Hence every element g ∈ G has the form g = atc forsome t ∈ Z and c ∈ Z(G). Now if gi = atici, i = 1, 2, then
g1g2 = at1c1at2c2 = at2+t1c2c1 [as c1 ∈ Z(G)] = at2c2a
t1c1 = g2g1,
as c2 ∈ Z(G). This shows that G is Abelian, now take the contra-positive.
(iii) Suppose K = {e, k} with k2 = e. If g ∈ G then by normality g−1kg ∈K, so g−1kg = e or k. If the former, k = e, and if the latter, kg = gk for allg ∈ G; hence K ≤ Z(G).
(iv) This is another extension of the Correspondence Theorem (Theorem4.16). We have J = Gθ and hg = gh for all g ∈ G and h ∈ H, hencehθgθ = gθhθ; that is Hθ ≤ Z(Gθ).
486 Solution Appendix Answers and Solutions to Problems
(v) HZ(G) ≤ G by Lemma 4.14, and if hi ∈ H and zi ∈ Z(G), thenh1z1h2z2 = h1(h2z2)z1 [as z1 ∈ Z(G)] = h2h1z2z1 [as H is Abelian] =h2z2h1z1 [as z2 ∈ Z(G)].
(vi) Use Problem 4.22. Second part: No – For example, let G = S3 andK = 〈(1, 2, 3)〉 ' C3. K / G (as the index is 2) and Z(K) = K (as K isAbelian), but Z(G) = 〈e〉, see Problem 2.26(iv).
(vii) We have [J,G] ≤ K gives j−1g−1jg ∈ K for j ∈ J and g ∈ G, orjg = gjk for g ∈ G, j ∈ J and some k ∈ K. Hence jKgK = jgK = gjkK =gKjK, that is J/K ≤ Z(G/K). Now reverse argument.
(viii) Using the Second Isomorphism Theorem (Theorem 4.15) we obtainZ(G)/(Z(G) ∩K) ' Z(G)K/K. Further Z(G)K/K ⊆ Z(G/K) if and onlyif zkKz′k′K = z′k′KzkK, or zkz′k′K = z′k′zkK, for all z, z′ ∈ Z(G) andk, k′ ∈ K. But both z and z′ commute with all elements of G, and kk′K =k′kK for all k, k′ ∈ K.
Problem 4.17 If x =∑g∈Gmgg and y =
∑g∈G ngg, then x + y =∑
g∈G(mg + ng)g and rx =∑g∈G rmgg for mg, ng, r ∈ F . Also (x+ y)θh =
xθh+yθh, (rx)θh = r(xθh), θhj = θhθj and θe is the identity map on U . Nowif h ∈ ker θ, then xθ = x for all x ∈ U , so gh = g giving h = e.
Problem � 4.18 (i) Check the vector space axioms. The new addition+ forms an Abelian group (as G is Abelian), G is closed under the newscalar multiplication, the vector space zero is e (as x1 = x), and (xa)b = xab,c(x+ y) = (xy)c = xcyc = cx+ cy and (c+ d)x = xc+d = xcxd = cx+ cy.
(ii) The rules for subgroups exactly follow those for vector subspaces.
(iii) An endomorphism θ of G corresponds to a linear map in G and viceversa. For in G we have xθyθ = xyθ, and so in G we have (x+ y)θ = xθ+ yθand (cx)θ = (xc)θ = (xθ)c = c(xθ). This argument reverses. A linear mapcan be represented by a non-singular matrix, that is by a member of GLm(p),and a non-singular linear map is an automorphism of G.
Problem 4.19 (ia) Z is cyclic. An automorphism maps generators to gen-erators, and so as this group has only two generators, 1 and −1, there canonly be two automorphisms; the first is the identity map and the second maps1 7→ −1 and so maps n 7→ −n for all n ∈ Z. Hence Aut (Z) ' C2.
(ib) AutT2 ' S3. If L = T2\{e} then as o(L) = 3 all permutations of Lare automorphisms φ of T2 provided we set eφ = e because all elements of Lhave order 2. See problem 4.18(iii).
(ic) AutS3 ' S3. As in (ib) all permutations of the elements of order 2 inS3 generate automorphisms as the elements of order 3 can be expressed asproducts of elements of order 2.
(id) AutC4 ' C2. There is only one element of order 2, so all automor-phisms map this element to itself. Hence there are two automorphisms, thefirst is the identity map, and the second interchanges the two elements oforder 4.
(ie) By Theorems 4.23 and B16, Aut (Cpn) ' Cpn−1(p−1).

Solutions 4 487
(ii) No. Suppose D8 = 〈a, b | a8 = b2 = e, bab = a7〉, then as in theexample on page 83 there is an automorphism φ : a 7→ a, b 7→ ab whichsatisfies φ8 = ι. But for this group there are four elements of order 8, that isa, a3, a5 and a7, and so there are four automorphisms
ψi : a 7→ a2i+1, b 7→ b for i = 0, 1, 2, 3.
Hence using the methods in the example quoted above, there are 32 automor-phisms and the automorphism group is isomorphic to an extension of D8 byC2; the copy of D8 is obtained if we only consider the automorphisms ψ0, ψ2
and φ and there powers and products.
(iii) If o(G) = 1 or 2, the only automorphism is the identity map as au-tomorphisms map e to e. Conversely suppose AutG = 〈e〉. So consequentlyall inner automorphisms equal the identity map, that is a−1ga = g for alla, g ∈ G, and hence G is Abelian. Now the map ψ defined by aψ = a−1 is anautomorphism (for (ab)ψ = b−1a−1 = a−1b−1 = aψbψ), and so all elementsof G have order at most 2, that is G is an elementary Abelian 2-group, seeProblem 4.18 above. But by (iii) in this problem if G has order larger than 2,then there exists a non-identity automorphism (that is a non-singular linearmap) which is a contradiction.
Problem 4.20 (i) Use Problem 3.1 and check that (1, j)ψ2 = (1, j) forj = 2, . . . , 6. Begin with
(1, 2)ψ2 = (1, 5)(2, 3)(4, 6)ψ
= (1, 5)ψ(1, 2)ψ(1, 3)ψ(1, 2)ψ(1, 4)ψ(1, 6)ψ(1, 4)ψ
= (1, 2)(3, 6)(4, 5) . . . (1, 3)(2, 4)(5, 6) = (1, 2).
(ii) The symmetric group S6 has six subgroups isomorphic to S5, each ofwhich contains the set of permutations that fix a particular element of theset {1, 2, 3, 4, 5, 6}. This is typical of all symmetric groups. But because ofthe facts given in (i) S6 has a further set of six subgroups isomorphic to S5
obtained by looking at collections of products of four 2-cycles. For instancethe elements
(1, 4)(2, 6)(3, 5), (1, 2)(3, 4)(5, 6), (1, 4)(2, 5)(3, 6) and (1, 5)(2, 6)(3, 4)
generate a copy of S5. To see this we note that these four elements in S6 sat-isfy the relations in the presentation of S6 given in Problem 3.21 with n = 4.For example if we label these four permutations a, b, c, d respectively, thenab, bc, cd have order 3, and ac, ad, bd have order 2. The remaining five sub-groups can be obtained by permuting the entries 4, 5 and 6. Note that eachsubgroup contains ten of the fifteen products of three 2-cycles, but four aresufficient to generate the subgroup. Two notable facts about these new sub-groups are: They contain no 2-cycles, and unlike the first set of six subgroupsthey are transitive on the six-element set {1, 2, 3, 4, 5, 6}.
Problem 4.21 Conjugations by even elements define inner automorphismsin A5, but by Theorem 3.3, conjugation by odd elements (that is members

488 Solution Appendix Answers and Solutions to Problems
of S5\A5) also define automorphisms of A5. This can be extended to showthat the automorphism group of A5 is isomorphic to S5. And in fact this alsoapplies if ‘5’ is replaced by an integer larger than 6.
Problem � 4.22 (i) If φ is an automorphism, so is φ−1, that is Hφ−1 ⊆ Has H is characteristic. So H = (Hφ−1)φ ⊆ Hφ, but Hφ ⊆ H and equalityfollows.
(ii) If H / G, then g−1Hg ⊆ H for all g ∈ G, but if ν is an inner auto-morphism then for some g ∈ G we have hν = g−1hg, that is Hν ⊆ H; thisargument reverses.
(iii) If K char G and φ is an automorphism of G, then Kφ = K by (i).Hence if we restrict the domain of φ to K, the resulting map φ|K is an auto-morphism of K. But H char K and so Hφ = H(φ|K) = H, that is we haveH char G.
(iv) If a ∈ G and ψ is the inner automorphism given by gψ = a−1ga, thenas K / G we have ψ|K is an automorphism of K. But J char K, and soJψ|K ≤ J ; that is, if j ∈ J then a−1ja = jψ ∈ J . For a counter exampleto the last part let G = A4, H = V = 〈(1, 2)(3, 4), (1, 3)(2, 4)〉 (with order4), and J = 〈(1, 2)(3, 4)〉 (with order 2). We have H char G as H containsall of the elements of order 2 and automorphisms map elements of order 2to elements of order 2, and J / H as the index is 2, but J is not a normalsubgroup of G.
(v) If G = 〈a〉, o(a) = n and φ is an automorphism, then aφ = am forsome m satisfying (m,n) = 1; see the proof of Theorem 4.23. Also if H ≤ G,then H = 〈at〉 for some t |n by Theorem 4.20. Hence (t,m) = 1, and so φmaps H to itself, that is H is a characteristic subgroup of G.
(vi) Let φ be an automorphism of G and a ∈ Z(G), then for all g ∈ G wehave aφgφ = gφaφ. If we set h = gφ−1 (note φ−1 is also an automorphism),then this equation gives aφh = haφ for all h ∈ G, that is Z(G)φ ⊆ Z(G).
(vii) We have, for a, b ∈ G,
[a, b]φ = (a−1b−1ab)φ = (aφ)−1(bφ)−1(aφ)(bφ) = [aφ, bφ] ∈ G′.
Therefore G′φ ⊆ G′.(viii) Let G = 〈a, b : a2 = b2 = e, ab = ba〉 be the 4-group T2, and let
the automorphism φ be given by eφ = e, aφ = b, bφ = a and abφ = ab. Now〈a〉 / G, but it is not characteristic because 〈a〉φ = 〈b〉 6⊆ 〈a〉.

Solutions 5 489
Solutions 5
Problem 5.1 (i) Two orbits: {1, 2, 3}, {4}; stab(x) = 〈e〉 if x = 1, 2, 3, andis G if x = 4.
(ii) and (iii) One orbit, and all stabilisers equal 〈e〉.(iv) Two orbits: {1, 2}, {3, 4}; stab(1) = stab(2) = {e, (3, 4)} and stab(3) =
stab(4) = {e, (1, 2)}.(v) One orbit. Given x and y there is an even permutation mapping
x to y; stab(j) equals set of elements of A4 which fix j. For instancestab(1) = {e, (2, 3, 4), (2, 4, 3)} ' A3 ' C3.
(vi) If v ∈ V , orbit of v is {w : w = v\a for a ∈ F ∗} = {va : a ∈ F ∗}. Alsostab(v) = {1} if v 6= 0, and stab(v) = F ∗ if v = 0.
(vii) Note first f(x1, . . . , xn)\σ = f(x1σ, . . . , xnσ) is a polynomial inx1, . . . , xn; so σ maps Q [x1, . . . , xn] into itself. If ι is the identity permu-tation then f\ι = f , and for σ, τ ∈ Sn using associativity of composition wehave
f(x1, . . . , xn)\στ = f(x1(στ), . . . , xn(στ))
= f(x(1σ)τ , . . . , x(nσ)τ )
= f(x1σ, . . . , xnσ)\τ= (f(x1, . . . , xn)\σ)\τ ;
this gives an action. Hence the orbit of f is the set of all polynomials obtainedby replacing some of the variables with others. For example, if f = x1+c thenthe orbit of f is the set {xi + c : i = 1, . . . , n}, and if f = x21 + · · ·+ x2n thenthe orbit of f is f itself. The stabiliser of f is the subgroup of all elements σof Sn such that f\σ = f ; for example, the stabiliser of x1 + c is 〈e〉, and thestabiliser of x21 + · · ·+ x2n is Sn.
By the Orbit-stabiliser Theorem (Theorem 5.7) we have o(Of ) = [Sn :stab(f)], also o(Sn) = n!, hence o(Of ) is a divisor of n! by Lagrange’s Theo-rem (Theorem 2.27).
Problem 5.2 Suppose o(G) = prqs, o(H) = ptqu, o(J) = pvqw, wheret, v ≤ r and u,w ≤ s. The hypothesis implies either (a) t = r and w = s, or(b) v = r and u = s. Suppose (a), the proof is the same for (b) and can beextended if more primes are involved. Now H ∩ J ≤ H, so o(H ∩ J) | ptqu,and H ∩ J ≤ J , so o(H ∩ J) | pvqw. Hence
o(H ∩ J) | pvqu which gives o(H ∩ J) ≤ pvqu.
By hypothesis and Theorem 5.8 we have
o(HJ)o(H ∩ J) = o(H)o(J) = pt+vqu+w = o(G)pvqu.
Combining these statements shows that o(HJ) ≥ o(G), therefore HJ = G.For the second part use Theorem 5.8 again. See also Problem 2.18.

490 Solution Appendix Answers and Solutions to Problems
� Problem 5.3 (i) Suppose the orbits are X1, . . . , Xk. Now o(G) = pt,and the Orbit-stabiliser Theorem (Theorem 5.8) gives o(Xi) | o(G), hencefor each i, we have o(Xi) = pui for some ui = 0, 1, 2, . . . If o(Xi) = 1 fori = 1, . . . , r, and o(Xi) = psi > 1 for i = r + 1, . . . , k relabelling if necessary,then as o(X) = o(X1)+ · · ·+o(Xk), we have o(X) = r+ps1 + · · · . The resultfollows as r = o(fix(G,X)).
(ii) By Lemma 5.21, Z(G) 6= 〈e〉. Also as J is a disjoint union of itsconjugacy classes (it is normal) C1 = {e}, C2, . . . . If J ∩ Z(G) = 〈e〉, theno(Ci) > 1 for i = 2, 3, . . . , this follows from the Class Equation (Theorem5.20). Therefore o(J) = 1 + o(C2) + · · · ≡ 1(mod p) which is impossible asp | o(J) by hypothesis.
Problem 5.4 (i) Use: g ∈ stabG(x\h) iff (x\h)\g = x\h iff x\hgh−1 = xiff hgh−1 ∈ stabG(x) iff g ∈ h−1stabG(x)h; and apply Problem 2.23(ii). Orwe can argue as follows: If y ∈ O{x} then O{y} = O{x}, and therefore byTheorem 5.7 [G : stab(x)] = [G : stab(y)] which gives the result.
(ii) The sum∑
(o(fix(g,X)) counts each x ∈ X a total of stabG(x) timesby definition of the stabiliser. Also if y ∈ O{x}, we have by (i) o(stabG(x)) =o(stabG(y)). Now use Theorem 5.7 to show that each orbit contributes o(G)to the sum, and so counts the number of orbits. This is sometimes called‘Burnside’s Counting Lemma’.
(iii) By transitivity m = 1, also o(fix(e,X)) = o(X) > 1, so o(fix(g,X))cannot be positive for all g ∈ G.
Problem 5.5 (i) If o(G) = n, then the two given conjugacy classes haveorder 1 (for the class {e}) and n− 1 (for the rest), and both of these integersdivide n by Theorem 5.19.
(ii) Suppose G is simple and [G : H] = 2, 3 or 4, then by Theorem 5.15core(H) = 〈e〉, and G is isomorphic to a (transitive) subgroup of S2, S3 orS4, respectively.
(iii) Fix a ∈ G. The set of b such that ab = ba is the centraliser CG(a),and we have o(CG(a)) = o(G)/o(C`{a}). If c ∈ C`{a} then C`{c} = C`{a},and so o(CG(c)) = o(CG(a)). Hence the number of pairs {a, b} with ab = baas a ranges over its conjugacy class is o(C`{a}) · o(CG(a)) = o(G). We cannow sum over the h(G) conjugacy classes of G.
Problem � 5.6 Use Theorem 5.15 and Problem 2.24 to show that K =core(K); note that o(G) has no prime factor smaller than p0.
Problem 5.7 (i) Use: If h = a−1ga then h−1 = a−1g−1a.
(ii) If D4 = 〈a, b : a4 = b2 = e, bab = a3〉, the conjugacy classes are{e},{a2}, {a, a3}, {b, a2b} and {ab, a3b}; all self-inverse. The conjugacy classesfor A4 are {e}, {(1, 2)(3, 4), (1, 3)(2, 4), (1, 4)(2, 3)}, {(1, 2, 3), (1, 4, 2), (1, 3, 4),(2, 4, 3)} and {(1, 3, 2), (1, 2, 4), (1, 4, 3), (2, 3, 4)}. The first two are self-inverse,the inverse of third is the fourth and vice versa. For SL2(3), see Section 8.2.In the table on page 172 (here rows correspond to conjugacy classes) the first,second and fifth rows give self-inverse classes, the inverse of row three is rowfour, and the inverse of row six is row seven.

Solutions 5 491
Problem 5.8 (i) Use Theorem 2.13. If gx = xg, for x ∈ X and g ∈ CG(x),then xg−1 = g−1x et cetera.
(ii) Use Definition 2.32.
(iii) If h ∈ H, then CG(H) ⊆ CG(h) by definition, now use the fact thatthis holds for all h ∈ H.
(iv) We have H ≤ CG(J), so hj = jh for all h ∈ H and j ∈ J . As H ≤ Jthis shows that j ∈ Z(H) for all j ∈ J ; the result follows.
(v) For first part use the definition and for second part we have a ∈g−1CG(H)g, iff gag−1 ∈ CG(H), iff gag−1 commutes with h for all h ∈ H, iffgag−1h = hgag−1 for all h ∈ H, iff ag−1hg = g−1hga for all h ∈ H, and soiff a ∈ CG(g−1Hg).
(vi) g ∈ CG(H) iff ghg−1 = h for all h ∈ H, and g ∈ NG(H) iff ghg−1 ∈ Hfor all h ∈ H.
(vii) If CG(H) = 〈e〉, there is h ∈ H such that ah 6= ha for all a ∈ G\〈e〉which implies Z(J) = 〈e〉 for all J in the given range. If CG(H) 6= 〈e〉, thereexists b ∈ G satisfying b 6= e and bh = hb for all h ∈ H. This shows that〈b〉H ≤ G and b ∈ Z(〈b〉H), impossible by hypothesis.
Problem 5.9 (i) If D6 = 〈a, b | a6 = b2 = (ab)2 = e〉, then C(e) = C(a3) =D6, C(at) = 〈a〉 if 3 - t, and C(bat) = 〈bat, a3〉, so the centraliser of eachelement of order 2 has order 4.
For S4 see Problem 5.26. Similarly for (ii).
(iii) We have A5 is the disjoint union of five conjugacy classes, they are{e}, twenty 3-cycles, twelve 5-cycles, twelve 5-cycles, and fifteen 2-cycles × 2-cycles; see Problem 3.3. So the numerical Class Equation (Theorem 5.20(ii))for A5 gives
60 = 1 + 20 + 12 + 12 + 15.
The centralisers of the 3- and 5-cycles are the cyclic groups they generate (oforders 3 and 5, respectively), and
CA5((1, 2)(3, 4)) = {e, (1, 2)(3, 4), (1, 3)(2, 4), (1, 4)(2, 3)}.
Problem 5.10 Note that a permutation on the set {m + 1, . . . , n} com-mutes with τ , also any power of τ commutes with τ . Now check that there isnothing else in CSn
(τ).
Problem 5.11 (i) As Z(G) / G, we have 〈a〉Z(G) ≤ G if a ∈ G (Lemma4.14(ii)), and if h ∈ Z(G) then ah = ha. Now note that a 6∈ Z(G).
(ii) As H is Abelian, H ≤ CG(H). Use (i) to show that if a ∈ CG(H)\Hthen H is not maximal Abelian.
Problem 5.12 (i) Use definition.
(ii) If a ∈ CG(CG(A)) then ay = ya for all y ∈ CG(A), that is for all ysuch that yc = cy for all c ∈ A. This is true for all a ∈ A.

492 Solution Appendix Answers and Solutions to Problems
(iii) By (i) and (ii) we have CG(A) ⊇ CG(CG(CG(A))), and for the reverseinclusion substitute CG(A) for A in (ii).
Problem � 5.13 (i) Suppose H / K and NG(H) < K. There existsk ∈ K\NG(H), and for h ∈ H, k−1hk ∈ H. But k 6∈ NG(H) = {g ∈ G :g−1Hg = H} which is a contradiction.
(ii) We have, where h, h′ ∈ H,
g−1NG(H)g = {x : x = g−1ag and for all h there exists h′ with a−1ha = h′}= {x : x = g−1ag and for all h there exists h′
with gg−1a−1gg−1hgg−1agg−1 = h′}= {x : for all h there exists h′ with gx−1g−1hgxg−1 = h′}= {x : for all h there exists h′ with x−1g−1hgx = g−1h′g}= NG(g−1Hg).
(iii) NJ(H) = {g ∈ J : g−1Hg = H}, so NJ(H) ⊆ J , and NJ(H) ⊆NG(H) as J ≤ G; hence NJ(H) ⊆ NG(H) ∩ J . But if k ∈ NG(H) ∩ J thenk ∈ J and k−1Hk = H. This gives k ∈ NJ(H) and equality follows.
(iv) If [H,K] ≤ H, then for h ∈ H and k ∈ K we have [h, k] = h−1k−1hk ∈H, and so k−1hk ∈ H and k−1Hk ≤ H. We can interchange k and k−1, andso kHk−1 ≤ H, that is k−1Hk = H and k ∈ NG(H). For the converse, ifk ∈ NG(H) and h ∈ H, then [h, k] = h−1(k−1hk) ∈ H.
(v) Use the coset action, so the set X equals the collection of right cosetsof J in G, and o(X) ≡ 0 (mod p) by hypothesis. By Problem 5.3 this showsthat o(fix(J,G)) ≡ 0 (mod p). But J is fixed by this action, hence at leasttwo elements of X are fixed (as p ≥ 2). Suppose the second is Jg whereJg 6= J . So g 6∈ J and g−1Jg = J , but this implies that g ∈ NG(J) givingthe result. Easier arguments exist using the Sylow theory.
Problem 5.14 (i) Let A =(a11 a12a21 a22
)∈ GL2(Q), then dA−1 =
(a22 −a12−a21 a11
)where d = detA 6= 0. Now if A ∈ NG(D), then C = A−1
(x 00 y
)A ∈ D, for all
non-zero x, y ∈ Q. The off-diagonal entries of C are
a11a21(y − x) and a12a22(x− y).
As these are zero we obtain either a11 = a22 = 0, or a12 = a21 = 0 (wecannot have a11 = a12 = 0 because A is non-singular). Hence A is diagonalor anti-diagonal, and NG(D) is the subgroup of diagonal and anti-diagonalmatrices in GL2(Q).
(ii) In the 3 × 3 case NG(D) is the subgroup of all matrices with onenon-zero entry in every row and column; see Problems 3.12 and 3.15.
Problem 5.15 (i) We have H ≤ NG(H) ≤ G. Let o(H) = r, o(NG(H)) =rs and o(G) = rst [by Lagrange’s Theorem (Theorem 2.27)]. By Lemma5.25(iii) the number of conjugates of H in G is t, so by Problem 2.23(ii) thetotal number of elements of G in a conjugacy class of H is less than rt, that

Solutions 5 493
is less than rst the order of G even if s = 1.
(ii) Let H be a maximal subgroup of G. By (i) we can find a ∈ G suchthat it does not belong to H or any of its conjugates.
Now either 〈a〉 = G or 〈a〉 < G. If the latter, there exists a maximal J < Gwith 〈a〉 ≤ J < G, but J is conjugate to H, and so a 6∈ J , a contradiction.
Problem 5.16 (i) We have NG(K) = G and AutK is Abelian (Theorem4.23), so by Problem 5.8(vi) we have G = CG(K), that is each element of Kcommutes with each element of G.
(ii) This is similar using Theorem 4.23 again.
(iii) We have G/CG(K) is isomorphic to a subgroup of a finite group, thatis AutK, now argue as in (i).
Problem 5.17 (i) By (i) in Problem 5.13 H ≤ NG(K) and by (ii) of thisproblem NG(K) ≤ NG(CG(K)), (a) follows. (b) Now CG(K) = NG(K), soH ≤ CG(K) which gives K ≤ Z(H) by definition of the centraliser.
(ii) We have H ≤ Z(NG(H)) if and only if hk = kh for all h ∈ H andk ∈ NG(H). But CG(H) = {g ∈ G : gh = hg for all h ∈ H} and NG(H) ={g ∈ G : for all h ∈ H there exists h′ ∈ H such that gh = h′g}. So if hk = khfor all h ∈ H and k ∈ NG(H), the h′ in the definition of NG(H) equals h inall cases, that is NG(H) = CG(H). This argument reverses.
Problem 5.18 If o(Z(G)) = 3, 5 or 15, then G is Abelian by Problem4.16(ii) (as 3 and 5 are both prime). In this group conjugacy classes of orderlarger than 1 have orders 3 or 5. The Class Equation (Theorem 5.20) nowshows that the only possibility is that G has three classes of order 3 andone of order 5. The class with order 5 contains all of the elements of G withorder 3, but elements of order 3 occur in pairs: {c, c2} with c3 = e which is acontradiction as 5 is odd.
Problem 5.19 (i) Z(G) is the set of scalar matrices (Problem 2.26), andso o(Z(G)) = 2.
(ii) The matrix(a b0 c
)is non-singular provided a 6= 0 6= c, so there are two
choices for both a and c, and three for b; therefore o(H) = 12, and so by (i)Z(G) ≤ H.
(iii) Let h−1gh ∈ H where h =(a bc d
)and g =
(r s0 u
). The lower left-hand
entry of h−1gh is 0 when ac(r− u) + c2s = 0. This holds for all non-singular
matrices h =(a bc d
)when s = 0 and r = u, or by (i) when g ∈ Z(G). Therefore
core(H) = Z(G).
(iv) By Theorem 5.15, G/core(H) = G/Z(G) is isomorphic to a subgroupof S4 as [G : H] = 4, see (ii). But o(G/Z(G)) = 24, and so G/Z(G) ' S4.
Problem 5.20 Let H be the normal closure of 〈a〉 in G, see Problem 2.25.As CG(a) / G, H ≤ CG(a); see quoted problem. This problem also showsthat H can be expressed as
H = 〈g−1aug : g ∈ G, u ∈ Z〉.

494 Solution Appendix Answers and Solutions to Problems
We have H / G but is it Abelian? We need
(g−1atg)(g−11 aug1) = (g−11 aug1)(g−1atg) for g, g1 ∈ G, t, u ∈ Z,
or rearranging the terms in this expression
(g1g−1atgg−11 )au = au(g1g
−1atgg−11 ).
But this follows as H is contained in the centraliser of a in G. For a counterexample see page 103. In this example CD3
(b) is a non-normal subgroup ofD3 but 〈b〉 is Abelian.
Problem 5.21 (i) Let h−1ah = b, then the set {g ∈ G : g−1ag = b} ={g ∈ G : g−1ag = h−1ah} = {g ∈ G : (gh−1)−1a(gh−1) = a} = CG(a) for asg ranges over G so does gh−1 (Theorem 2.8).
(ii) By Theorems 2.27 and 5.19, o(CG(a))o(C`(a)) = o(G). Hence
o(CG(a)) ≥ o(G/G′) if and only if o(G)/o(C`(a) ≥ o(G)/o(G′)
if and only if o(G′) ≥ o(C`(a)).
Let θ : C`(a) → G′ be given by g−1agθ = [a, g] = a−1g−1ag where g ∈ G.Now g−1ag = h−1ah if and only if a−1g−1ag = a−1h−1ah, and so θ is aninjective map. Hence as o(G) is finite, the number of conjugates of a in G isless than or equal to the order of G′.
(iii) As K / G and [G : K] = p, G/K ' Cp and there exists a ∈ G suchthat if g ∈ G then g = atk for 0 ≤ t < p and k ∈ K. Hence if b = g−1cgthen b = h−1a−tcath. But CK(c) < CG(c), and so a and c commute givingb = h−1ch.
Problem � 5.22 (i) Suppose Z(G) = 〈e〉 and r is the class number. So Ghas one class of order 1 and r − 1 classes of order at least p0 where p0 is thesmallest prime dividing o(G). Hence by the Class Equation (Theorem 5.20)1 + (r− 1)p0 ≤ o(G). But p0 | o(G), and so rp0 | o(G) giving rp0 ≤ o(G). Nowtake contra-positive.
(ii) As G is not Abelian Z(G) < G, and so o(Z(G)) ≤ o(G)/2. If we haveequality, then G/Z(G) has order 2 and so is cyclic, but then by Problem4.16(ii) G is Abelian. Hence r − o(Z(G)) ≥ 1, if we have equality then thereis only one conjugacy class C of order larger than 1 and so its order is in factlarger than o(G)/2. But by the Class Equation this would imply that thecorresponding centraliser had an order strictly between 1 and 2.
(iii) o(Z(G)) 6= 1 by Lemma 5.21, o(Z(G)) 6= p2 by Problem 4.16(ii),and o(Z(G)) 6= p3 as G is not Abelian; hence o(Z(G)) = p. Further, asZ(G) / G (Lemma 2.20), G/Z(G) is Abelian with order p2 (Theorem 5.22),hence G′ ⊆ Z(G) by Problem 4.6. But G′ 6= 〈e〉 because G is not Abelian,therefore G′ = Z(G). Next we ask: Could G have a conjugacy class of orderp2? No, for if o(C`(y)) = p2, then by Theorem 5.19 [G : CG(y)] = p2, and soo(CG(y)) = p. But by Problem 5.21(ii), p = o(CG(y)) ≥ o(G/Z(G)) = p2; acontradiction. Hence G has p conjugacy classes of order 1 (the centre) and s,say, conjugacy classes of order p, so c = p+ s and the Class Equation gives

Solutions 5 495
p3 = o(G) = o(Z(G)) +∑r
i=1o(C`(yi)) = p+ sp,
hence s = p2 − 1 and r = p2 + p− 1.
Problem 5.23 (i) Suppose j−1aj = b. Then C(b) = {g : gb = bg} ={g : gj−1aj = j−1ajg} = {g : jgj−1a = ajgj−1} = {j−1hj : ha = ah} =j−1C(a)j.
(ii) As each element of G lies in exactly one conjugacy class, o(G) =∑o(C`(xi)) where xi is a representative of the i-th conjugacy class (1 ≤ i ≤
r), and the sum is taken over these classes. By Theorem 5.19, this gives
o(G) =∑
[G : CG(xi)] =∑
o(G)/ci where ci = o(CG(xi)),
and so 1 = 1/c1 + · · ·+ 1/cr.
(iii) For fixed r the above equation only has finitely many solutions, seeProblem B4. Hence there can only be finitely many groups with r conjugacyclasses.
(iv) For r ≤ 3, the solutions are 1 = 1/1 = 1/2 + 1/2 = 1/2 + 1/3 + 1/6 =1/2 + 1/4 + 1/4 = 1/3 + 1/3 + 1/3. The solution 1/2 + 1/2 corresponds to thegroup C2; 1/3 + 1/3 + 1/3 corresponds to C3; 1/2 + 1/3 + 1/6 correspondsto S3; whilst 1/2 + 1/4 + 1/4 does not correspond to a group.
Problem 5.24 By Lemma 5.25 the number of conjugate subgroups g−1Hgis bounded by [G : H], and the minimum overlap between two of them is 〈e〉.So
o(⋃
g∈Gg−1Hg
)≤ 1 + (o(H)− 1)[G : H],
now use Lagrange’s Theorem (Theorem 2.27). If H satisfies the given condi-tion, then ⋃
g∈Gg−1Hg = G
and so [G : H] = 1. See also Problem 5.15(i).
Problem 5.25 (a) If we take σ = (1, 2, 3), then (4, 5) commutes with(1, 2, 3), and so (4, 5) ∈ CSn
(σ).
(b) This follows from the definition of the centraliser.
(c) We have [CSn(σ) : CAn
(σ)] = [CSn(σ) : CSn
(σ) ∩ An] = [AnCSn(σ) :
An] [by Theorem 5.8] = [Sn : An] = 2, as An contains all even perms. andCSn
(σ) contains at least one odd perm.
(d) By Theorem 5.19 we have [An, CAn(σ)] = o(C`An
(σ)). As C`An(σ) ⊆
C`Sn(σ), with (iii) this shows that o(C`Sn
(σ)) = o(C`An(σ)).
Problem 5.26 For G1 = S4 the element centralisers are: C(e) = G1,C((1, 2)) = 〈(1, 2), (3, 4)〉 ' T2, C((1, 2)(3, 4)) = 〈(1, 2), (1, 3, 2, 4)〉 ' D4,C((1, 2, 3)) = 〈(1, 2, 3)〉 ' C3, and C((1, 2, 3, 4)) = 〈(1, 2, 3, 4)〉 ' C4.
The subgroup centralisers and normalisers are:

496 Solution Appendix Answers and Solutions to Problems
(i) C(〈e〉) = N(〈e〉) = G1;(ii) C(〈(1, 2)〉) = N(〈(1, 2)〉) = 〈(1, 2), (3, 4)〉 ' T2;(iii) C(〈(1, 2)(3, 4)〉) = N(〈(1, 2)(3, 4)〉) = 〈(1, 3, 2, 4), (1, 2)〉 ' D4;(iv) C(〈(1, 2, 3)〉) = 〈(1, 2, 3)〉, N(〈(1, 2, 3)〉) = 〈(1, 2, 3), (1, 2)〉 ' S3,N/C ' C2 ' Aut (C3);(v) C(〈(1, 2, 3, 4)〉) = 〈(1, 2, 3, 4)〉, N(〈(1, 2, 3, 4)〉) = 〈(1, 2, 3, 4), (1, 3)〉,
' D4, N/C ' C2 ' Aut (C4);(vi) C(〈(1, 2)(3, 4), (1, 3(2, 4)〉) = 〈(1, 2)(3, 4), (1, 3)(2, 4)〉,
N(〈(1, 2)(3, 4), (1, 3(2, 4)〉) = G1, N/C ' S3 ' Aut (T2);(vii) C(〈(1, 2), (3, 4)〉) = 〈(1, 2), (3, 4)〉, N(〈(1, 2), (3, 4)〉)
= 〈(1, 3, 2, 4), (1, 2)〉, N/C ' C2 � Aut (T2) ' S3;(viii) C(〈(1, 2, 3), (1, 2)〉) = 〈e〉, N(〈(1, 2, 3), (1, 2)〉) = 〈(1, 2, 3), (1, 2)〉,
N/C ' S3 ' Aut (S3);(ix) C(〈(1, 2, 3, 4), (1, 3)〉) = 〈(1, 3)(2, 4)〉, N(〈(1, 2, 3, 4), (1, 3)〉)
= 〈(1, 2, 3, 4), (1, 3)〉, N/C ' T2 � Aut (D4) ' D4;(x) C(A4) = 〈e〉, N(A4) = G1, N/C ' S4 ' Aut (A4);(xi) C(G1) = 〈e〉, N(G1) = G1, N/C ' S4 ' Aut (S4).
For G2 = SL2(3) the element centralisers are: C(e) = G2, C((2 00 2
)) = G2,
the centraliser of an order 3 element g is the subgroup of order 6 generatedby g and
(2 00 2
), and the centralisers of the order 4 and 6 elements are the
cyclic groups they generate.
The subgroup centralisers and normalisers of SL2(3) are:
(i) C(〈e〉) = N(〈e〉) = G2;(ii) C(
(2 00 2
)) = N(
(2 00 2
)) = G2;
(iii) C((1 10 1
)) = N(
(1 10 1
)) = 〈
(1 10 1
),(2 00 2
)〉,
a matrix of order 3 has centraliser and normaliser of order 6;(iv) Centraliser of an order 4 subgroup is itself, normaliser of an order4 subgroup is the normal subgroup isomorphic to Q2, N/C ' C2 'Aut (C4);(v) Centraliser and normaliser of a subgroup of order 6 are both them-selves;(vi) and (vii) Centraliser of both Q2 and G2 are 〈
(2 00 2
)〉, isomorphic to
C2, normaliser of both Q2 and G2 are G2. In each case N/C ' A4, andAut (Q2) and Aut (SL2(3)) are both isomorphic to S4, see Problem 5.19and Section 8.2.
Finally note that Burnside’s Normal Complement Theorem (Theorem 6.17)only applies in case (iii) for the second groupG2, and in this case the subgroupin question has the normal complement 〈
(2 22 1
),(1 22 2
)〉 ' Q2. In the other cases
where o(N/C) = 1 the corresponding subgroup is not Sylow.

Solutions 6 497
Solutions 6
Problem � 6.1 (i) We have K is maximal and K / G. Now as G/K is ap-group, by Cauchy’s Theorem (Theorem 6.2) it contains an element of orderp, and so a subgroup of order p with the form J/K for some J satisfyingK / J ≤ G; this follows using the Correspondence Theorem (Theorem 4.16).But K is maximal, hence J = G and [G : K] = p.
(ii) Suppose the cyclic group G has generator a. By Theorem 4.20, G hasa unique subgroup H generated by ap which has index p in G. If h ∈ H thenh is a power of ap, that is h = (ap)r = (ar)p for some r ∈ Z, and so everyelement in H is a p-power. Now use Problem 2.13(ii) and see Theorem 6.6.See also Section 10.2.
(iii) As G is a p-group, the conjugacy classes have orders 1, p, p2, . . . . AlsoK / G, so K is a union of conjugacy classes. But o(K) = p and {e} isa conjugacy class in K. Therefore K consists entirely of elements whoseconjugacy classes have order 1, that is they belong to Z(G).
Problem 6.2 (i) Note automorphisms map p-elements to p-elements.
(ii) Let a, b ∈ G with ap = bp = e. By Problem 4.6, G′ ≤ Z(G), and so[a, b] ∈ Z(G). Now e = ap = b−1apb = (b−1ab)p = (a[a, b])p = ap[a, b]p [byProblem 2.17(ii) with t = p] = [a, b]p. This shows that (ab)p = apbp whichgives closure.
Problem 6.3 There are five group types, three of which are Abelian withall of their subgroups normal and Z(G) = G. Subgroup lattice diagrams aregiven on pages 547 to 551.
(i) G is cyclic, so G ' 〈a | a8 = e〉. By Theorem 4.20, the proper non-neutral subgroups are 〈a2〉 ' C4, 〈a4〉 ' C2.
(ii) G is Abelian and all elements have order 2, that is G is elementaryAbelian (Problem 4.18). We can write G as 〈a, b, c | a2 = b2 = c2 = e, ab =ba, bc = cb, ca = ac〉. It has 7 elements of order 2, and so 7 subgroups of order2: 〈a〉, . . . , 〈abc〉. By trial we see that it also has 7 subgroups of order 4 eachisomorphic to T2: 〈a, b〉, 〈a, c〉, 〈b, c〉, 〈ab, bc〉, 〈a, bc〉, 〈b, ac〉 and 〈c, ab〉. Thereare 21 (unordered) subsets of a 7-element set, and each subgroup isomorphicto T2 contains three of them; hence seven in all.
(iii) The third Abelian possibility is that G not cyclic and it has an elementof order 4, so we can write G as 〈a, b | a4 = b2 = e, ab = ba〉 with elementse (order 1), a2, b, a2b (order 2) and a, a3, ab, a3b (order 4). Hence there arethree subgroups of order 2. There are also 3 subgroups of order 4: 〈a〉, 〈ab〉(isomorphic to C4) and 〈a2, b〉 ' T2.
(iv) G = 〈a, b | a4 = b2 = e, ba = a3b〉 ' D4. The non-neutral elements area2, b, ab, a2b, a3b (order 2) and a, a3 (order 4). Hence G has five subgroupsisomorphic to C2 and one isomorphic to C4. By trial we see that it alsohas two isomorphic to T2: 〈a2, b〉, 〈a2, ab〉. (A subgroup of order 4 is normaland so contains the “central” involution a2, hence adding another involutiongenerates a copy of T2.) As the only non-neutral element that commutes withboth a and b is a2 we have Z(G) = 〈a2〉 ' C2, and so checking cosets we
498 Solution Appendix Answers and Solutions to Problems
deduce G/Z(G) = 〈aZ, bZ〉 ' T2. The centre Z(G) and the three subgroupsof order 4 are normal (see Problem 2.19). By trial the others are not, theydo not commute with a.
(v) G = 〈a, b | a4 = e, b2 = a2, ba = a3b〉 ' Q2. The non-neutral elementsare a2 (order 2) and a, a3 = ab2 = b2a, b, ab, a2b = b3 = ba2, a3b = ab3 (order4). Hence G has only one subgroup of order 2: 〈a2〉, and three of order 4:〈a〉, 〈b〉 and 〈ab〉 which are all cyclic. As above only e and a2 commute withall elements and so Z(G) = 〈a2〉, and checking cosets we have G/Z(G) =〈aZ, bZ〉 ' T2. Subgroups have index 2 or equal Z(G), and so are ALLnormal – a very unusual feature – that is the group is called Hamiltonian,see Problem 7.13.
Problem 6.4 (i) In G1 we have barb = a−3r for r ∈ Z, hence a = b2ab2 =b(bab)b = ba−3b = a9 which gives a8 = e. Similarly in G2. Now in G1,arb = ba−3r, and so all elements of G1 have the form arbs for 0 ≤ r < 8and 0 ≤ b < 2. Again the same is true for G2. Check that if arbs = e, thenr = s = 0.
(ii) Subgroups of G1 are 〈e〉; 〈a4〉, 〈b〉, 〈a4b〉 (Order 2); 〈a4, b〉(' T2);〈a2〉, 〈a2b〉 (cyclic, order 4); 〈a〉, 〈ab〉 (cyclic, order 8); 〈a2, b〉 (' C4 × C2);and G1 – all normal except 〈b〉 and 〈a4b〉 which are conjugate.
Subgroups of G2 are 〈e〉∗; 〈a4〉∗, 〈b〉, 〈a2b〉, 〈a4b〉, 〈a6b〉 (Order 2); 〈a4, b〉,〈a4, a2b〉 (' T2); 〈a2〉, 〈ab〉, 〈a3b〉 (' C4); 〈a〉∗ (' C8); 〈a2, b〉∗(' D4);〈a2, ab〉∗ (' Q2); and G2
∗ – those marked ∗ are normal. Note that thisgroup has three non-isomorphic subgroups of order 8 only one of which isAbelian.
(iii) Both groups have three maximal subgroups of order 8, normal sub-groups of all powers of 2 dividing 16, and a five-term normal series (seeChapter 9).
(iv) In G1 we have 〈a4〉 = (G1)′ < Z(G1) = 〈a2〉, and in G2 we have〈a4〉 = Z(G2) < (G2)′ = 〈a2〉.
(v) The subgroup lattices of G1 and C8 × C2 are identical except for the‘top’ group. But note that their ‘normal’ subgroup lattices are not identicalbecause one group is Abelian whilst the other is not. The reader should drawdiagrams of these lattices; see pages 557 and 558.
Problem 6.5 (i) Let φ be the natural homomorphism G → G/Z(G). AsG/Z(G) is Abelian and has order p2, see Problems 5.3 and 4.16(ii), it hasa normal subgroup H/Z(G), say, of order p. The Correspondence Theorem(Theorem 4.16) now shows that G has a normal subgroup H of order p2.There are two possibilities (a) H contains an element of order p2 (and so iscyclic), and (b) all non-neutral elements of H have order p (and so H is anelementary Abelian p-group).
Case (a) – H = 〈a〉 where ap2
= e and ap 6= e. Let b ∈ G \〈a〉. As H / G,
b−1ab = ar for some integer r. Now b−1asb = ars and b−tabt = art
. Hence asbp ∈ H, we have rp ≡ 1(mod p2) which gives r = 1 + up for some integer u.If we replace b by aub, we obtain the first group.

Solutions 6 499
Case (b) – H = 〈a〉 × 〈b〉 where a and b have order p; see Chapter 7.If c = [a, b], then by Problem 4.6, c ∈ Z(G), that is ca = ac and cb = bc.If p = 2 then G is Abelian (see Corollary 2.11, in fact it is an elementaryAbelian 2-group), but it is not Abelian if p > 2.
(ii) Working over a p-element field we can take, for example,
a =
(1 1 00 1 00 0 1
), b =
(1 0 00 1 10 0 1
), c =
(1 0 10 1 00 0 1
).
(iii) ES1(3). The proper subgroups are 〈a〉, 〈ab〉, 〈ab2〉 (' C9); 〈a3, b〉 ('C3×C3); 〈a3〉, 〈b〉, 〈a3b〉, 〈a6b〉 (' C3) and 〈e〉, all are normal except 〈b〉, 〈a3b〉and 〈a6b〉, and second to fifth are maximal. The centre is 〈a3〉.ES2(3). The proper subgroups are 〈c, a〉, 〈c, b〉, 〈c, ab〉, 〈c, ab2〉 (' C3 ×
C3); 〈c〉, 〈a〉, 〈b〉, 〈ac〉, 〈ac2〉, 〈bc〉, 〈bc2〉, 〈ab〉, 〈ab2〉, 〈a2b〉, 〈a2b2〉, 〈abc〉, 〈a2bc2〉(' C3) and 〈e〉. Second to fifth are maximal, and first to sixth and 〈e〉 arenormal, and the centre is 〈c〉.
Problem 6.6 If o(G) = p2 use Theorem 5.22 and the fact that Cp × Cpcontains p subgroups of order p. If o(G) = p3 then, apart from Cp3 , each ofthe groups involved (Cp2 ×Cp, C3
p , ES1(p) and ES2(p)) have more than onesubgroup of order p; see the previous problem and Section 7.2. This fact canalso be proved directly using Theorem 10.21 and Problem 2.17(ii); see Doerkand Hawkes [1992], page 204. Note that the result is false for p = 2, Q2 hasa unique subgroup of order 2 and it is clearly not cyclic (or Abelian).
If o(G) = pn where n > 3 then, by Theorem 6.5, we can find K to satisfy:K / G and o(K) = p. Suppose G/K has two subgroups, H/K and J/K, oforder p. We may assume that H/K ≤ Z(G/K) (see Chapter 10). It followsthat HJ ≤ G and o(HJ) = p3 (use Theorem 5.8). Now by the case above,this group has a unique subgroup of order p2, and so H = J , G/K has aunique subgroup of order p, and so is cyclic. Let G = 〈K, a〉 and A = 〈a〉. IfG ∩A = 〈e〉, then G has two subgroups of order p, they are {c ∈ A : cp = e}and K, which is impossible. Therefore K ≤ A and G = KA = A.
Problem 6.7 (i) The group is Abelian by definition. Using the relations
we have ap0 = e and apn+1
n = apn
n−1 = · · · = ap0 = e, and so the order of everygenerator is a power of p, hence all elements are p-elements as the group isAbelian.
(ii) Use the equations above.
(iii) If H ≤ Cp∞ and H contains infinitely many of the an, then H = Cp∞by (ii). But if H only contains ai1 , . . . , aik , where i1 < · · · < ik, then by (ii)again H = 〈aik〉.
Problem 6.8 (ia) As 32 is the largest power of 3 dividing o(S6), by The-orem 4.22 a Sylow 3-subgroup of S6 is isomorphic to either C9 or C3 × C3.Using the quoted problem we see that S6 contains no element of order 9. Wecan also note directly that C3×C3 ' l(1, 2, 3), (4, 5, 6)〉 is a Sylow 3-subgroupof S6.

500 Solution Appendix Answers and Solutions to Problems
(ib) By Problem 3.7, S4 is isomorphic to a subgroup of A6, and the Sylow2-subgroups of S4 are isomorphic to D4 so the same is true for A6.
(ic) o(SL2(5)) = 120, so a Sylow 2-subgroup has order 8. Using the quotedproblem the only order 8 group with a single element of order 2 is Q2, so thisis the isomorphism type of the Sylow 2-subgroups in this case.
(ii) Let Dn = 〈a, b | an = b2 = e, ba = an−1b〉. The elements of this groupare: e, a, . . . an−1, b, ab, . . . , an−1b where o(abt) = 2 for t = 0, . . . , n − 1, andthe n Sylow 2-subgroups are 〈abt〉, all of order 2; n in all. Note that by theSylow theory n2 is odd and divides n. The rest are subgroups of the cyclicsubgroup 〈a〉 which has odd order. Now use Theorem 4.20.
If n = 2k the result is clearly not true, also D6 has a Sylow 2-subgroupisomorphic to T2, et cetera.
(iii) We have H ' S3 × S3 with o(H) = 36, and so H has Sylow 2-subgroups of order 4 (nine in all). Let P1 = 〈(1, 2), (4, 5)〉, P2 = 〈(2, 3), (5, 6)〉and P3 = 〈(1, 2), (5, 6)〉 for example.
Problem � 6.9 (i) P is contained in both Q and H and so P ≤ Q ∩H.But Q ∩ H is a p-subgroup of H, and P is a p-subgroup of H of highestpossible power, hence we have equality.
(ii) We use Sylow 2 and 5. If P is a Sylow p-subgroup of G, then KP ≤ Gby Theorem 2.30. Also P ≤ KP , and KP is a p-group. But P is a p-subgroupof G of maximum p-order, hence P = KP which in turn implies K ≤ P .
(iii) See Problem 5.13(v).
(iv) Let G act by conjugation on K (so k\g = g−1kg for g ∈ G and k ∈ K),and restrict this action to P (page 98), that is P acts by conjugation on K.
fix(K,P ) = {k ∈ K : j−1kj = k for all j ∈ P} = K ∩ CG(P ) = 〈e〉.
This last equation holds because o(CG(P )) is a power of p and by hypoth-esis (o(K), p) = 1. By Problem 5.3(i), o(fix(K,P )) ≡ o(K) (mod p), henceo(K) ≡ 1 (mod p).
(v) Automorphisms map Sylow p-subgroups to Sylow p-subgroups, soOp(G) is a characteristic subgroup of G (Problem 4.22), the second partfollows directly from (i).
(vi) Let Pi be a Sylow p-subgroup of G. If a ∈ Pi for all i, theng−1ag ∈ g−1Pig for all i and all g ∈ G. But by Sylow 2 the set of conju-gates of the set of Sylow p-subgroups is just the set of Sylow p-subgroupsitself. Hence if a ∈
⋂Pi then g−1ag ∈
⋂Pi for all g ∈ G. Now use Theorem
2.15.
Problem � 6.10 (i) By Sylow 4, np(G) ≡ np(H) ≡ 1 (mod p), so byTheorem 6.8(ii) we have
[G : NG(P )] ≡ [H : NH(P )] ≡ 1 (mod p).
But NH(P ) ≤ H ≤ G hence [G : NG(P )] = [G : H][H : NH(P )] and theresult follows.

Solutions 6 501
(ii) There exists a ∈ G with h = a−1ga, and so h ∈ a−1CG(P )a =CG(a−1Pa). Also P, a−1Pa ≤ CG(h) and they are Sylow subgroups of CG(h).Hence by Sylow 2 there exists b ∈ CG(h) satisfying P = b−1(a−1Pa)b, whichgives ab ∈ NG(P ) and b−1a−1gab = b−1hb = h.
(iii) P is a Sylow p-subgroup of G, o(P ) = pr and o(G) = . . . pr . . . . Theno(KP ) = . . . ps . . . for some s ≤ r, and if o(K) = . . . pt . . . then o(K∩P ) = pu
for some u ≤ t. By Theorem 5.8 we have
o(K)o(P ) = o(KP )o(K ∩ P ), and so prpt = pspu,
which gives s = r and u = t. Hence K ∩ P is a Sylow p-subgroup of K, aspowers of p agree, and o(KP ) = . . . pr . . . .
SecondlyK/G, soK/KP , and by the Correspondence Theorem (Theorem4.16) as the p-powers of o(G) and o(KP ) are equal (to pr), we see that thep-powers of o(G/K) and o(KP/K) are also equal (to pr−t in this case). Nowthe Second Isomorphism Theorem (Theorem 4.15) gives KP/K ' P/(K∩P ),the right-hand side is a factor group of a p-group, and so is itself a p-group,therefore the left-hand side is also a p-group and this proves that KP/K isa Sylow p-subgroup of G/K.
(iv) One example is as follows. Let G = A6. Note S4 ≤ A6 (see Problem3.7) and the powers of 2 in the prime factorisation of both o(A6) and o(S4)are equal (to 23). Now P = 〈(1, 2, 3, 4), (1, 3)〉 ' D4 is a Sylow 2-subgroup ofS4 (Chapter 8), so it is also isomorphic to a Sylow 2-subgroup of A6 by theSylow theory, and we can take it as 〈(1, 2, 3, 4)(5, 6), (1, 3)(5, 6)〉. Let J be thegroup of all even permutations of the set {1, 2, 3, 5, 6}, then A5 ' J ≤ A6,o(J) = 60 and o(P ) = 8. Now P ∩ J = 〈(1, 3)(5, 6)〉 and o(P ∩ J) = 2, soP ∩ J is not a Sylow 2-subgroup of J as such a group would have order 4.Note that you could also use Problem 6.8(iii).
(v) This follows from (iii) as KP/K is just some Sylow subgroup of G.
Problem 6.11 (i) If H = 〈P1, . . . , Pr〉, then H ≤ G and o(Pi) | o(H) fori = 1, . . . , r. This shows that o(H) = o(G) and so H = G. Use Theorem 5.8when r = 2.
(ii) First we have
(K1 ∩ P )(K2 ∩ P ) ≤ K1K2 ∩ P.
Suppose P is a p-group, o(Ki) = . . . pri . . . and o(K1K2) = . . . ps . . . . ByProblem 6.10(iii) o(Ki ∩P ) = pri and o(K1K2 ∩P ) = ps. So if o(K1 ∩K2) =. . . pt . . . , then by Theorem 5.8
o(Ki ∩ P )(K2 ∩ P ) = pr1+r2/pt = ps = o(K1K2 ∩ P ),
and the result follows. For the second part use Problem 2.18 (Dedekind’sIdentity).
(iii) By (i), P = P1 ∩H and Q = Q1 ∩H, and P and Q are distinct. As Pis a Sylow p-subgroup of H, by Sylow 5 there exists a Sylow p-subgroup P1

502 Solution Appendix Answers and Solutions to Problems
of G with P1 ≥ P . Result follows by (ii).
(iv) Use (iii) and Sylow 5, if P is a Sylow p-subgroup of H then P is ap-subgroup of G, and so it is contained in a Sylow p-subgroup of G.
(v) By the quoted problem we have [G : H] =∑c∈C [J : J ∩ c−1Hc] where
C is a set of double coset representatives. Now as H is Sylow, p - [G : H], sothere is a c ∈ C such that p - [J : J ∩ c−1Hc]. Also J ∩ c−1Hc is a p-group,and hence it is a Sylow p-subgroup of J , now put a = c.
Problem 6.12 (i) We have o(Sp) = p!, so a Sylow p-subgroup P has orderp and is isomorphic to Cp. But Sp contains (p−1)! permutations which are p-cycles, and so (p−2)! Sylow p-subgroups (see Problem 2.5(iii)). Therefore [Sp :NSp
(P )] = np = (p−2)! which gives o(NSp(P )) = p(p−1). Also P / NSp
(P ),so NSp
(P ) is a subgroup of Sp of order p(p−1) with a normal cyclic subgroupP of order p. Further development will depend on the factorisation of p− 1,for an example see Problem 3.11.
(ii) Suppose np > 1 and P = NG(P ) for all Sylow p-subgroups P of G.As G is a transitive subgroup of Sp, P ' Cp. By the Sylow theory, G has(p − 1)np = o(G) − np elements of order p. None of these elements is fixedby G (as it is transitive), so G has at most np fixed elements. Each stabiliserstabG(i) (1 ≤ i ≤ p) has np elements which possess one fixed point. It followsthat all stabilisers have order 1, and so are equal. Now refer to the first proofof Sylow’s main theorem. Hence the group has a unique Sylow p-subgroupcontrary to our assumption. Now see Problem 12.15.
Problem 6.13 (i) If n3 = 4, then G has eight elements of order 3, and soonly four elements of order 1, 2 or 4. But a Sylow 2-subgroup has order 4,and so it must be unique.
(ii) The possible orders for G are 5, 10, 15, 20 and 30. Now n5 = 1 followsdirectly from the Sylow theory in the first four cases. If n5 6= 1 in the fifthcase, then n5 = 6 and the group contains 24 elements of order 5. Further ifa is an involution in G, P is a Sylow 5-subgroup of G (and so P = NG(P )),then conjugation of a by the elements of P gives five distinct involutions in G.Hence G has no element of order 3 which is impossible by Cauchy’s Theorem(Theorem 6.2).
(iii) Ten subgroups isomorphic to C3 generated by (1, 2, 3), (1, 2, 4), (1, 2, 5),(1, 3, 4), (1, 3, 5), (1, 4, 5), (2, 3, 4), (2, 3, 5), (2, 4, 5) and (3, 4, 5); five subgroupsisomorphic to T2, the first is generated by (1, 2)(3, 4) and (1, 3)(2, 4) and theremainder are similar noting that there are five ways of choosing four elementsout of five; and six subgroups isomorphic to C5 generated by (1, 2, 3, 4, 5),(1, 2, 3, 5, 4), (1, 2, 4, 3, 5), (1, 2, 4, 5, 3), (1, 2, 5, 3, 4), and (1, 2, 5, 4, 3).
Problem 6.14 By Theorems 6.2 and 6.11 the group G contains elementsa and b with o(a) = q, o(b) = p, where K = 〈a〉 / G and H = 〈b〉 ≤ G.
Also by the normality of K, b−1ab = ar for some r 6= 1. So b−tabt = art
and
asbt = btarts. Hence G has the presentation
G ' 〈a, b | aq = bp = e, b−1ab = ar〉.

Solutions 6 503
Further this gives a = b−pabp = arp
, so rp ≡ 1 (mod q). The integer r existsby the theory of primitive roots; see Appendix B. In fact there are p − 1possibilities modulo p for r which can be written as r, r2, . . . , rp−1. Thesepossibilities do not give rise to distinct groups, for if we replace r by rk, say,then we obtain the original group if we also replace the generator b by bk, andH is cyclic of prime order so every non-neutral element can act as a generatorof the group. This is an example of a Frobenius group, see Web Section 14.3.
Problem � 6.15 Groups of order less than 60. By theorems proved in thischapter, groups whose orders are prime powers, or have three or fewer (notnecessarily distinct) prime factors, possess normal subgroups. The remainingcases are (a) 24, (b) 36, (c) 40, (d) 48, (e) 54, and (f) 56; we treat each ofthese in turn.
(a) o(G) = 24 = 23 · 3. Always look at the larger primes first! We haven3 ≡ 1 (mod 8) and n3 | 8 so n3 = 1 or 4. If n3 = 4, G is simple, and H is aSylow 3-subgroup of G, then core(H) = 〈e〉 giving an injection of G into S4
(Theorem 5.15). Comparing orders implies that G ' S4, but A4 / S4 whichgives a contradiction.
(b) o(G) = 36 = 22 · 32. The group G has a Sylow 3-subgroup H (of order9) with index [G : H] = 4. As in (a), if G is simple then Theorem 5.15provides an injection of G into S4 which is impossible because o(G) = 36 ando(S4) = 24.
(c) o(G) = 40 = 23 · 5. By Sylow 4 we have n5 ≡ 1 (mod 5) and n5 | 8,which gives n5 = 1 and G has a normal cyclic subgroup of order 5.
(d) o(G) = 48 = 24 · 3. The method given in (a) also applies here. Notethat if n3 = 16, then the group has 32 elements of order 3 which implies thatthe Sylow 2-subgroup is unique. See also Problem 6.17(iii).
(e) o(G) = 54 = 2 · 33. A Sylow 3-subgroup has index 2 and so is normalby Problem 2.19.
(f) o(G) = 56 = 23 · 7. By Sylow 4 we see that n2 ≡ 1 (mod 2), n2 | 7,n7 ≡ 1 (mod 7) and n7 | 8, so n2 = 1 or 7, and n7 = 1 or 8. If n7 = 8,then G has 48 elements of order 7, the neutral element, and only seven otherelements, that is there would be only one Sylow 2-subgroup. Hence eithern2 = 1 or n7 = 1 or both.
Problem 6.16 (i) The group G has order 60 and six Sylow 5-subgroups.Suppose K / G where 1 < o(K) < 60. If 5 | o(K), then by Problem 6.13(ii) Kcontains a normal Sylow 5-subgroup P . Now P is characteristic in K and sonormal in G; see Problem 4.22. If 5 - o(K), then 5 | o(G/K), and by Problem6.13(ii) again we have
〈e〉 < PK/K / G/K and so PK / G.
This shows that PK = G (as 5 | o(PK)), and so every proper non-neutralnormal subgroup K of G has order 12. But by Problem 6.13(i) we see thatK contains a normal, and so characteristic, Sylow subgroup which is normalin G but not of order 12 which is a contradiction.

504 Solution Appendix Answers and Solutions to Problems
(ii) Suppose G is a simple group of order 60. It has no subgroups of index2, 3 or 4; use the same proof as for A5 on page 101. Next we show that Gdoes have a subgroup of index 5. Suppose not. By Sylow 4, G has 15 Sylow2-subgroups. By Sylow 4, n2 = [G : NG(P )] where P is a Sylow 2-subgroup,and o(NG(P )) < 12 by supposition.
Next we show that G has 45 elements of order a power of 2. Let P1 and P2
be distinct Sylow 2-subgroups of G, and let a ∈ P1 ∩ P2 where a 6= e. SinceP1 and P2 are Abelian, we see that
o(CG(a)) > 4; but 4 | o(CG(a)) as P1 < CG(a).
Hence [G : CG(a)] ≤ 5 which by the first statement implies that G = CG(a).But in turn this implies that a ∈ Z(G), so Z(G) 6= 〈e〉, and hence G has aproper non-neutral normal subgroup which is contrary to assumption thatG is simple. Therefore P1 ∩ P2 = 〈e〉, and so G has 45 elements of order 2or 4. But if G is simple it also has six Sylow 5-subgroups, and so it has 24elements of order 5. But 24 + 45 > 60, therefore our supposition is false andG does indeed have a subgroup of index 5.
Now by Theorem 5.15, and as G is simple, there is an injective homo-morphism of G into S5. Hence we can treat G as a subgroup of S5. Sup-pose G 6= A5, so GA5 = S5 by Problem 2.19(ii). Further by Theorem 5.8,o(G∩A5) = o(G)o(A5)/o(GA5) = 30. Hence G∩A5 ≤ G with order o(G)/2,and so G∩A5 is normal (by Problem 2.19 again) which is impossible as G issimple. Therefore G ' A5.
Problem 6.17 (i) 90 = 2 · 32 · 5, so if G is simple, n5 = 6 and n3 = 10. Ifeach pair of Sylow 3-subgroups has neutral intersection, then the group has24 elements of order 5 and 80 of order 3 or 9 which is impossible. So supposeP and Q are distinct Sylow 3-subgroups and o(R) = 3, then P,Q < S and9 | o(S), so o(S) = 18, 45 or 90. If o(S) = 18, Theorem 5.15 gives an injectivehomomorphism of G into S5, but 90 - 120; if o(S) = 45, then S / G (Problem2.19(i)); and if o(S) = 90, then R / G by Theorem 5.16.
(ii) 108 = 33(3+1), we give proof for pr(p+1) where r > 1. If G is simple,then np = p+ 1, so by Theorem 5.15, there is an injective homomorphism ofG into Sp+1. This is not possible as o(Sp+1) is not divisible by pr(p+ 1), theorder of G; note r > 1.
(iii) 112 = 24 · 7, we give the proof for pn · q. Note first that the Sylowtheory implies that np = q if G is simple. If each pair of Sylow p-subgroupshas neutral intersection, then G possesses q(pn−1) elements of order a powerof p, and so only q others. These elements will form a single subgroup of orderq which must be normal by Sylow 3.
Now if S has a unique Sylow p-subgroup T contained in U , a Sylow p-subgroup of G, it would also contain NP (R), and so by the given inequality,R is a proper subgroup of P ∩U . By the maximal property of R, this impliesthat P = U . A similar argument shows that Q = U , but P and Q aredistinct. Now the Sylow theory implies that S has q Sylow p-subgroups, andall of these contain R (use Problem 6.9(iii)).

Solutions 6 505
Using Problem 6.9(vii) this shows that every Sylow p-subgroup of Gcontains R, and by Sylow 2 this further shows that R / G. Hence by thesupposed simplicity of G we have R = 〈e〉.
(iv) 132 = 22 · 3 · 11. By Sylow 4 we have n2 = 1, 3, 11 or 33, n3 = 1, 4or 22, and n11 = 1 or 12. If the group G simple, then n2 ≥ 3, n3 ≥ 4 andn11 = 12. So G has at least six elements of order 2 or 4, eight of order 3, and120 of order 11, totalling 134 which is impossible as o(G) = 132.
(v) 144 = 24·32 and n3 = 1, 4 or 16. If n3 = 4 use Theorem 5.15 and 36 - 24.If n3 = 16 and all pairs of Sylow 3-subgroups have neutral intersection, thenthe group has 128 elements of order 3 or 9, and so only 16 others which showsthat n2 cannot be larger than 1. If P and Q are distinct Sylow 3-subgroupsof G, R = P ∩Q and S = NG(R), then as in (ii) o(S) = 18, 36, 72 or 144. Ifo(S) = 18, use the fact that a group of order 18 has a normal subgroup oforder 9. (If P is a normal p-subgroup of S, then S ≤ NG(P ), and so n3 ≤ 8;Problem 2.19); if o(S) = 36, use Theorem 5.15; if o(S) = 72, then S / G; andif o(S) = 144, then R / G.
As a further exercise you could now check that the only non-Abelian simplegroups of order less than 360 are of order 60 or 168. For example if o(G) = 120begin by constructing a map into S6 using a suitable normaliser property.
Problem 6.18 Let Q2 = 〈a, b | a2 = b2 = (ab)2〉. The maximal subgroupsare 〈a〉, 〈b〉 and 〈ab〉, note that b−1ab = a3, a−1ba = b3 and a−1(ab)a = (ab)3
et cetera, and so there is an action of Aut (Q2) on the maximal subgroupsof Q2 defined by conjugation, and by Theorem 5.12 there exists a homomor-phism φ : Aut (Q2) → S3 (S3 because there are three maximal subgroups).This is surjective by the equations above, for example one automorphism in-terchanges a and b throughout, another interchanges a and ab throughout.
Now by Corollary 5.27, Inn (Q2) ' Q2/Z(Q2) ' C2×C2; see Problem 6.3.Also kerφ ≤ Inn (Q2). One inner automorphism maps a 7→ a3 and b 7→ b.Hence o(kerφ) = 4, and so o(Aut (Q2)) = 24. Which group of order 24 is it?There are a number of ways to answer this, see page 171, for instance showdirectly that Z(Aut (Q2)) = 〈e〉 or show that all subgroups of Aut (Q2) oforder 2 or 3 are not normal.
Problem 6.19 In S5 we have n5 ≡ 1(mod 5) and n5 | 24, so n5 = 1 or 6, bySylow 4. But S5 contains 24 elements of order 5, so n5 = 6, and using Sylow4 again this gives [NS5
(P ) : P ] = 6 or o(NS5(P )) = 20 where P is a Sylow
5-subgroup. If we take P = 〈(1, 2, 3, 4, 5)〉, then as τ−1στ = (1, 3, 5, 2, 4) =σ2, we have τ ∈ NS5
(P ). Hence both σ and τ belong to NS5(P ), and so
J = 〈σ, τ〉 ≤ NS5(P ). But o(σ) = 5 and o(τ) = 4, hence o(J) ≥ 20 and soJ = NS5
(P ).
Problem � 6.20 (i) We have P is a Sylow subgroup of G, H / G, andP / H. The Frattini argument (Theorem 6.14) gives G = NG(P )H. But ifP / H then H ≤ NG(P ), hence G = NG(P )H = NG(P ) and so P / G.
(ii) Suppose the number of prime factors of o(G) is t and p∗ is the largest.The result holds when t = 2 by Theorem 6.11. Using induction suppose theresult holds for all groups G1 where o(G1) is square-free and the number ofits prime factors is less than t. By the given fact there exists H/ G; and o(H)

506 Solution Appendix Answers and Solutions to Problems
has fewer than t prime factors, as o(G) is square-free. There are two cases.
(a) If p∗ is the largest prime factor of o(H), then the inductive hypothesisgives P , a Sylow p∗-subgroup of H normal in H. By the first part P / G.
(b) Secondly, suppose p∗ - o(H); but p∗ | o(G), and so p∗ | o(G/H). Bythe inductive hypothesis, G/H has a normal Sylow p∗-subgroup P1, say. Letθ be the natural homomorphism G → G/H (see Definition 4.13), and letJ = P1θ
−1. Using the Correspondence Theorem (Theorem 4.16) we have
[G : J ] = [G/H : P1], and p∗ - [G : J ] as p∗ - [G/H : P1];
this shows that p∗ | o(J). Let P ∗ be a Sylow p∗-subgroup of J , and so P ∗ isalso a Sylow p∗-subgroup of G. Now by Problem 6.10(iii), P ∗H/H is a Sylowp∗-subgroup of G/H, and P ∗H/H = P ∗θ ⊆ Jθ = P1. Hence P1 = P ∗H/H,and the Second Isomorphism Theorem gives P ∗H/H ' P ∗/(P ∗ ∩H) ' P ∗
as P ∗ is cyclic.
Therefore P ∗ = P1 and the result follows because these facts show thatthere is a unique Sylow p∗-subgroup of G which is normal by Sylow 3.
Problem 6.21 (i) Using Dedekind’s Law (Problem 2.18) we have, as H ∩K1 ≤ H,
(H ∩K1)(H ∩K2) = H ∩ (H ∩K1)K2 = H,
because H ≤ (H ∩K1)K2 and K1K2 = G.
(ii) Let G = S4, K1 = V (' T2), K2 = 〈(1, 2, 3), (1, 2)〉 ' S3 and H =〈(1, 2, 3, 4), (1, 3)〉 ' D4; see Section 8.1. Now H ∩K1 = V , H ∩K2 = 〈e〉 andso the RHS equals V and V < H.
(iii) Using the factor group definition we have
NG/K(KP/K) = KNG(KP )/K.
Now P is a Sylow p-subgroup of KP , as (o(K), p) = 1, and KP / NG(KP ).Hence the Frattini Argument (Theorem 6.14) gives
NG(KP ) = KPNNG(KP )(P ) = KPNG(P ) = KNG(P );
Use a conjugation argument for the second inequality, and P ≤ NG(P ) forthe third. Now combine identities.
(iv) Put K1 = K ∩H. By (iii)
NH/K1(K1P/K1) = K1NH(P )/K1.
Using the Second Isomorphism Theorem (Theorem 4.15) this gives
K1NG(P )/K1 = NG/K1(K1P/K1) = K1NH(P )/K1,
which shows thatNH(P ) ≤ NG(P ) ≤ K1NH(P ).
The result now follows by Problem 2.18(ii).
Solutions 6 507
Problem 6.22 (i) Note that g−1Pig is a Sylow p-subgroup by Sylow 2,and if g−1Pig = g−1Pjg then Pi = Pj . Also ghθ = gθhθ as g−1(h−1Pih)g =(hg)−1Pi(hg), and so θ is a homomorphism. Now g ∈ ker θ if and only if gθis the identity perm. So g−1Pig = Pi for all i, that is g ∈ NG(Pi) for all i.Therefore ker θ =
⋂iNG(Pi).
(ii) Dn has n Sylow 2-subgroups (see Problem 6.8(ii)), each isomorphic toC2. So n2 = n, which gives NG(Pi) = Pi, and the intersection is 〈e〉, that isθ is injective and there is a copy of Dn in Sn.
Problem 6.23 (a) The group GL2(3) has one element of order 1, thirteenof order 2, eight of order 3, six of order 4, eight of order 6, and twelve of order8.
(b) To show that H is a subgroup either use direct calculation, or notethat if we put (for example) a =
(0 12 0
)and b =
(1 11 2
), then a2 = b2 = (ab)2
which are the defining equations of the quaternion group Q2. It is normalbecause the order of a conjugate of an element of order 2 or 4 is itself anelement of order 2 or 4.
(c) GL2(3) has 32 elements whose orders are a power of 2, so by the Sylowtheory, this group has three Sylow 2-subgroups and, by Problem 6.8(i), H isa subgroup of each of them. Choose an element of order 8 and its powers,add to H, and by direct calculation show that a subgroup of order 16 results.This can be done twice more.
(d) Now show that the group has three Sylow 2-subgroups each of whichhas a presentation of the form
〈a, b | a8 = b2 = e, bab = a3〉,
these subgroups are called semi-dihedral. The three values of a can be takenas(1 12 1
),(1 11 0
)and
(0 11 1
), and the three values of b are then
(1 00 2
),(1 20 2
)and(
2 02 1
), respectively.
(e) Three pairs of order 4 elements of K with suitably chosen elementsof order 2 give three copies of D4, with similar calculations for copies of D3
and D6 (Problem 5.19). Hence the 55 subgroups are: 〈e〉, thirteen copies ofC2, four of C3, three of C4, three of C6, three of C8, six of C2 × C2, eight ofD3, three of D4, four of D6, one of Q2, one of SL2(3) (see Section 8.2), thethree semi-dihedral subgroups mentioned above, and the group itself. Theonly non-neutral proper normal subgroups are the centre (isomorphic to C2),H and SL2(3) (Problem 2.19).

508 Solution Appendix Answers and Solutions to Problems
Solutions 7
Problem 7.1 (i) – Lemma 7.5. (i) and (ii) follow from the definitions;if h and j do not commute in H1, say, then (h, e, . . . , e) and (j, e, . . . , e) donot commute in the product, and vice versa. For (iii) use the isomorphismgiven by the map (j, (k, l)) 7→ ((j, k), l) for j ∈ J, k ∈ K and l ∈ L; a similarargument applies in (iv). For (v) let φi be defined by (h1, . . . , hn)φi = hi andproceed as in the proof of Lemma 7.2.
(i) – Theorem 7.6. Follow the proof of Theorem 7.4 by showing that ifg ∈ G, then g has the unique representation: g = h1 . . . hn where hi ∈ Hi,and also the order of the terms in this product is unimportant (consider eachpair {Hi, Hj} in turn). Now as in the proof of Theorem 7.4, define ψ bygψ = h1 . . . hn and proceed as before.
(ii) You only need to check condition (iii) and this follows by Lagrange’sTheorem (Theorem 2.27).
Problem � 7.2 (i) Expand [(a, b), (c, d)] = (a, b)−1(c, d)−1(a, b)(c, d) =(a−1c−1ac, b−1d−1bd) = ([a, c], [b, d]), and use this to define an isomorphism.
(ii) (e, e) ∈ H×J , and if (h1, j1), (h2, j2) ∈ H×J , then (h1, j1)−1(h2, j2) =(h−11 h2, j
−11 j2) ∈ H × J , as H ≤ G and J ≤ K. Also (g, k)−1(h, j)(g, k) =
(g−1hg, k−1jk) ∈ H × J as H / G and J / K.
Secondly, define a map θ : G ×K → G/H ×K/J by (g, k)θ = (gH, kJ).It is clearly surjective and
(g1, k1)(g2, k2)θ = (g1g2, k1k2)θ = (g1g2H, k1k2J) = (g1Hg2H, k1Jk2J)
= (g1H, k1J)(g2H, k2J) = (g1, k1)θ(g2, k2)θ
using coset multiplication and properties of the direct product. Hence θ is ahomomorphism, and its kernel is {(g, k) : (g, k)θ = (H,J)} = H × J . TheFirst Isomorphism Theorem gives (G×K)/(H × J) ' G/H ×K/J .
(iii) We have J∩K/G, so by the Correspondence Theorem (Theorem 4.16)we obtain J/(J∩K), K/(J∩K)/ G/(J∩K). Also J/(J∩K)∩K/(J∩K) = 〈e〉(check elements). If g ∈ G, then g = jk for j ∈ J, k ∈ K, so
g(J ∩K) = jk(J ∩K) = j(J ∩K)k(J ∩K) ∈ (J/(J ∩K))(K/(J ∩K)),
and(J/(J ∩K))(K/(J ∩K)) ' J/(J ∩K)×K/(J ∩K).
Problem 7.3 (i) If H ' J , identify H with J and let D = {(h, h) : h ∈ H},note that (h−1, e)(h, h) = (e, h). For the converse use the Second IsomorphismTheorem (Theorem 4.15).
(ii) Use the same method as in the proof of Lemma 7.8 to show thatH × (J ∩L) is isomorphic to a subgroup of L. Then note that L = H(J ∩L),for if l ∈ L then l ∈ G, and so l = hj where h ∈ H and j ∈ J . But h ∈ L,hence h−1l = j ∈ L, and so j ∈ J ∩ L and hj ∈ H(J ∩ L).

Solutions 7 509
Problem 7.4 (i) If n = 2 and hi, h′i ∈ Z(Hi), i = 1, 2, then (h1, h2)(h′1, h
′2)
= (h1h′1, h2h
′2) = (h′1h1, h
′2h2) = (h′1, h
′2)(h1, h2). Now use induction.
(ii) Again suppose first n = 2, and let jr ∈ H1 and kr ∈ H2, all r. As wehave a direct product, each jr commutes with every ks and vice versa, so
[j1k1, j2k2] = k−11 j−11 k−12 j−12 j1k1j2k2
= j−11 j−12 j1j2k−11 k−12 k1k2 = [j1, j2][k1, k2],
now use this identity.
(iii) We have Hi,K / G, so [Hi,K] ≤ Hi ∩K / G. Also as in (ii) [G,K] =[H1,K] . . . [Hn,K], and so this is a subgroup of (Hi ∩K) . . . (Hn ∩K) = G?,say. So [K,K] ≤ G?, but K = K ′ = [K,K] which gives the result.
Problem 7.5 (i) If ex(G) has prime factorisation∏i psii , then for each
i there exists hi ∈ G with o(hi) = psii ti for some ti with (pi, ti) = 1. Let
gi = htii then o(gi) = psii , so let g =∏i gi, then o(g) = ex(G).
(ii) By Problem 2.7, the element g constructed in (i) will act as a generatorof G as its order equals o(G).
(iii) If F is the given field, let r = ex(F ∗) where F ∗ is the multiplicativegroup of F . By (i) the polynomial xr − 1 has at least r non-zero roots in thefield, but it cannot have more by assumption.
Problem 7.6 (i) Note first that there is a mistake in the statement ofthe problem: The subgroup J must be normal for the result to hold asthe following example shows. Let G = 〈(1, 2, 3, 4), (1, 2)〉 ' S4 and H =〈(5, 6, 7), (5, 6)〉 ' S3, so G×H ' S4×S3. If J = 〈(3, 4)(6, 7), (2, 3, 4)(5, 6, 7)〉,then J ' S3 and so it is not Abelian, J ≤ G × H but not normal, andJ ∩G = J ∩H = 〈e〉.
Now suppose L = G×H and J / L, then [J,G] ≤ J∩G and [J,H] ≤ J∩H,and using Problem 2.17(iii) we obtain
[J, L] = [J,G][J,H] ≤ (J ∩G)(J ∩H).
If either J∩G or J∩H is non-neutral then we are done, otherwise [J, L] = 〈e〉which implies that J is Abelian.
(ii) Let G = 〈a1〉× · · · × 〈a5〉, a direct product of five copies of Cp, and letH1 = 〈a1, a2a3〉, H2 = 〈a2, a3〉 and H3 = 〈a4, a5〉. The direct product of theHi has order p6, and so not isomorphic to G.
Problem � 7.7 (a) Given r and s with r ≤ s, the group Cps = 〈x〉 has
a subgroup of order pr which is cyclic, and generated by xps−r
(by Theorem4.20); and (b) if Hi ≤ Gi, i = 1, . . . , k, with each Gi Abelian of order psii ,then
H1 × · · · ×Hk ≤ G1 × · · · ×Gk.So, if n = ps11 . . . pskk ,m = pr11 . . . prkk , and ri ≤ si for i = 1, . . . , k, we obtain asubgroup of order m by (b) and the Basis Theorem of Finite Abelian Groups(Theorem 7.12) provided for each i we can find a subgroup Ji of order prii in

510 Solution Appendix Answers and Solutions to Problems
an Abelian group Ki of order psii .
Fix pi = p, and suppose G is an Abelian group of order ps. By Theorem7.12 G ' C1×· · ·×Cv where Ci is cyclic, o(Ci) = pui , and u1 + · · ·+uv = s.We need to find H to satisfy: H ≤ G and o(H) = pr for some r ≤ s. Choosex1, . . . , xv such that for all i, 0 ≤ xi ≤ ui and x1 + · · · + xv = r, there maybe many such solutions, and so many different H.
By (a) if Ci is cyclic with order pui , then it has a cyclic subgroup C ′i oforder pxi , and (by (b)) C ′1×· · ·×C ′v ≤ C1×· · ·×Cv, with o(C ′1×· · ·×C ′v) = pr
and o(C1 × · · · × Cv) = ps.
Problem 7.8 (i) First 385 = 5·7·11, and so there is only one Abelian group:C385. Secondly 432 = 24·33. As 4 = 3+1 = 2+2 = 2+1+1 = 1+1+1+1, thereare five Abelian groups of order 16: C24 , C23×C2, C22×C22 , C22×C2×C2 andC2×C2×C2×C2. Similarly as 3 = 2 + 1 = 1 + 1 + 1, there are three Abeliangroups of order 27: C27, C9×C3, and C3×C3×C3. Hence there are 15 Abeliangroups of order 432: C16 ×C27, . . . . For example C72 ×C6 occurs in this listas C72 ' C8 ×C9 and C6 ' C2 ×C3, hence C72 ×C6 ' C8 ×C2 ×C9 ×C3.
(iia) As 891 = 34 · 11, the Sylow theory gives
n3 ≡ 1 (mod 3), n3 | 11, and n11 ≡ 1 (mod 11), n11 | 81,
which in turn give n3 = n11 = 1. Hence a group G with order 891 hasnormal subgroups J of order 81 and K of order 11. Clearly J ∩K = 〈e〉 for Jonly contains elements which have order a power of 3, and K only containselements of order 11. Also JK = G, for by Theorem 5.8, o(J ∩K)o(JK) =o(J)o(K) which shows that o(JK) = o(G). Now apply Theorem 7.4.
(iib) Here 405 = 34 ·5, and as above n3 = 1, but n5 = 1 or 81. If n5 = 1, weobtain 14 direct product groups as in (i); and if n5 = 81 there is one possiblefurther group isomorphic to: C5 o C4
3 . If C5 is generated by a, then the 320elements of order 5 are arb where r = 1, 2, 3 or 4, and b is an element of C4
3(all b have order 3 and there are 80 of them). Note that the Sylow theoryimplies that n3 = 1 in this group. You need to show that if G ' C5 o H,where H is a normal subgroup of G with order 81, then H is Abelian and allelements have order 3. One way to do this is to use Theorem 11.11, in factthis group only has one non-neutral proper normal subgroup.
Problem 7.9 If there is a unique maximal subgroup use Problem 2.13(ii).If not, by Theorem 7.8 G is a direct product of its Sylow subgroups, therecannot be more than two factors because the maximal subgroups are simple.Now use the fact that the only simple p-groups are the cyclic p-groups.
Problem 7.10 Suppose φ ∈ AutG and ψ ∈ AutH. For (g, h) ∈ G × Hdefine θφ,ψ by
(g, h)θφ,ψ = (gφ, hψ) for g ∈ G, h ∈ H.
This is an automorphism of G×H, for it is bijective as φ and ψ are bijective,and

Solutions 7 511
((g, h)(g′, h′))θφ,ψ = (gg′φ, hh′ψ) = (gφ, hψ)(g′φ, h′ψ)
= (g, h)θφ,ψ(g′, h′)θφ,ψ.
Now define ξ : AutG × AutH → Aut (G ×H) by (φ, ψ)ξ = θφ,ψ. This is ahomomorphism for we have
(g, h)θφφ′,ψψ′ = (gφφ′, hψψ′) = ((gφ)φ′, (hψ)ψ′) = (gφ, hψ)θφ′,ψ′
= [(g, h)θφ,ψ]θφ′,ψ′ = (g, h)[θφ,ψ ◦ θφ′,ψ′ ],
for all g ∈ G and h ∈ H. Also ξ is easily seen to be injective as φ and ψ havethis property, and for surjectivity we argue as follows. For χ ∈ Aut (G×H)we need φ1 ∈ AutG and ψ1 ∈ AutH to satisfy (g, h)χ = (gφ1, hψ1) for allg ∈ G and h ∈ H. Now (g, h)χo(H) = (gφo(H), hψo(H)) and hψo(H) = e forall h ∈ H. But (o(G), o(H)) = 1 and so φo(H) is an automorphism of G andwe can define φ1 by gφ1 = (g, e)χo(H). The automorphism ψ1 can be definedsimilarly which gives the required surjectivity property.
Problem 7.11 (i) Suppose c ∈ G, o(c) = m and m - n. Show that o(gc) =LCM(m,n) > n, and so obtain a contradiction.
(ii) For example in S3 the largest order is 3, but this group also containselements of order 2; S4 is another example.
(iii) If g 6∈ J , then 〈J, g〉 intersects non-neutrally with H giving the requiredh, j and r.
(iv) The second statement follows from the first by Theorem 7.4. For theconverse, suppose H × J < G, choose an element of order p in G/(H ∩K)and apply (iii).
(v) Let H = 〈g〉 and J be as in (iii).
Problem 7.12 Suppose G is CS and let H = {g ∈ G : gp = e} ≤ G wherep | o(G). If θ ∈ AutG and h ∈ H, then (hθ)p = (hp)θ = e and H char G. ByCauchy’s Theorem (Theorem 6.2), there exists g ∈ H with o(g) = p and sog ∈ H and H 6= 〈e〉. But G is CS and so G = H. For the converse suppose nowG is elementary. By Problem 4.18 we can treat G as a vector space over thefield Fp for some prime p. In fact G has the representation G ' Cp×· · ·×Cpwith a finite number of factors. If J is a non-neutral subgroup of G, j ∈ Jand l ∈ G where j, l 6= e, then there exists an invertible linear map φ on thevector space G with l = jφ. But φ ∈ AutG and J char G. Hence we have Ghas the property CS.
Problem 7.13 We are given G = Q2 × T × O, so if H ≤ G, Lemma 7.8implies
H = ((Q2 × T ) ∩H)× (O ∩H).
Now O / G (by properties of the direct product), so we may suppose G =Q2×T , a 2-group. If Q2 ∩H = 〈e〉, then all elements of H have order 2, andhence H / G by Problem 4.18(iii). If Q2 ∩H > 〈e〉, then H ≥ Q′2 = G′ (asthe derived subgroup of Q2 equals its centre and has order 2) which impliesthat H / G by Problem 2.16(iii).

512 Solution Appendix Answers and Solutions to Problems
Problem � 7.14 (i) Clearly 〈a1, . . . , ak〉 = 〈a1〉 · · · 〈ak〉, and the sub-groups are normal because the group is Abelian. The condition
〈ai〉 ∩ 〈a1, . . . , ai−1, ai+1, . . . , ak〉
is equivalent to the given condition.
(ii) All a ∈ G where a 6= e satisfy o(a) = p, so o(〈a〉) = p, also if ai, aj ∈ G,〈ai〉 ∩ 〈aj〉 equals 〈e〉 or 〈ai〉, now use (i) and Problem 4.18.
Problem 7.15 (i) Note that as G and H are elementary they can betreated as vector spaces over Z/pZ, see Problem 4.18.
(ii) Let Dk be the direct product of all of the cyclic factors Ci of order pk
where Dk = 〈e〉 if there are no such factors. So G ' D1 × · · · ×Dt for someinteger t, and further pkG = pkDk+1 × · · · × pkDt. This gives pkG/pk+1G 'pkDk+1 × pkDk+2/p
k+1Dk+2 × · · · , and now we can use (i).
(iii) Use (ii).
(iv) If φ : G → H is an isomorphism, then (pkG)φ = pkH, and we canapply the Correspondence Theorem (Theorem 4.16). Reverse argument forconverse.
(v) We have (a) if θ : G → H is a homomorphism then, for all p, Gpθ isa subgroup of Hp; and (b) G ' H if and only if Gp ' Hp for all primes p.These facts give the result; the condition is:
Up(k,G) = Up(k,H) for all p and k.
For more details see Rotman [1994], pages 131 to 133.
Problem � 7.16 We have K/ J as K/G, A∩J ≤ J and (A∩J)∩K = 〈e〉,as A ∩K = 〈e〉, so (A ∩ J) oK exists and is isomorphic to a subgroup of J .Suppose j ∈ J\(A ∩ J) oK, then j = ak, a ∈ A and k ∈ K as J ∈ A oK.Hence a = jk−1, but a ∈ A so a ∈ A ∩ J . Therefore as k ∈ K we havej = ak ∈ (A ∩ J) oK; a contradiction.
Problem 7.17 (i) We have C15 ' C5 × C3, a direct product so a fortioria semi-direct product.
(ii) A4 / S4, C2 ' 〈(1, 2)〉 ≤ S4, A4〈(1, 2)〉 = S4 as o(A4〈(1, 2)〉) > o(A4)(Problem 2.19), and A4 ∩ 〈(1, 2)〉 = 〈e〉; hence S4 ' C2 oA4.
(iii) Q2 is not a semi-direct product. Each pair of non-neutral subgroupshas non-neutral intersection, because every non-neutral subgroup of Q2 con-tains the unique element of order 2 in Q2; see page 119.
(iv) Let A = 〈(a 00 1
)| a ∈ Q∗〉 and K = SL2(Q). Then we have A ≤
GL2(Q), K / GL2(Q) by Theorem 3.15, A∩K = 〈e〉 and also AK = GL2(Q)
for if X =(a bc d
)∈ GL2(Q) and detX = t, then Y =
(a/t b/tc d
)∈ SL2(Q) and(
t 00 1
)Y = X. Hence GL2(Q) ' AoK.
(v) We gave a representation of S4 as a semi-direct product in (ii), anotheris as follows. Let V = {e, (1, 2)(3, 4), (1, 3)(2, 4), (1, 4)(2, 3)} then V / S4; seeProblem 3.3. Also the set S of perms. on the set {1, 2, 3} forms a subgroup

Solutions 7 513
of S4 isomorphic to S3, that is S ≤ S4, and clearly S ∩ V = 〈e〉. HenceS4 ' S o V . For further examples see Chapter 8, but C15 ×C2 ' C5 ×C6 isanother, perhaps slightly trivial, example.
Problem 7.18 LetH = 〈a〉. As Hφ = Hψ, aφ and aψ are generators of thesame (cyclic) subgroup of Aut J . So there exist r, s ∈ Z satisfying (aφ)r = aψand (aψ)s = aφ. As H is cyclic and φ and ψ are homomorphisms, these give(ha)φ = hψ and (hb)ψ = hφ for all h ∈ H. Define θ : H oψ J → H oφ J by(h, j)θ = (ha, j). Using the semi-direct product operation we have
((h1, j1)(h2, j2))θ = (h1h2, (j1(h2ψ))j2)θ = ((h1h2)a, (j1(h2ψ))j2)
= (ha1ha2 , (j1(ha2φ))j2) = (ha1 , j1)(ha2 , j2)
= (h1, j1)θ(h2, j2)θ.
We also have θ′ : H oφ J → H oψ J , defined by (h, j)θ′ = (hb, j), is ahomomorphism. Now θ ◦ θ′ : (h, j) 7→ (hab, j), and aφ = aψs = (ars)φ, so asφ is injective, ars = a and hence hrs = h for all h ∈ H. This shows that θ ◦ θ′is the identity map on H oφ J , and similarly we have θ′ ◦ θ is the identitymap on H oψ J , and the result follows.
Problem 7.19 (i) Use the hint to show that G∗/ Hol(G) from which wealso obtain Hol(G) = G∗AutG. Now ξa ∈ AutG if, and only if, a = e (noteξa is an isomorphism only if a = e). So G∗ ∩ AutG = 〈e〉, and we have asemidirect product.
(ii) Hol(Cn) = Cn if n = 1, 2, Hol(Cn) ' Dn if n = 3, 4 or 6, and Hol(C5)is isomorphic to the group of order 20 given in the quoted problem.
Problem 7.20 The group C4 has two automorphisms: the identity map,and the map x 7→ x3 which interchanges the two elements of order 4. So weobtain two semi-direct products. The first is C4 × C4 with three elements oforder 2 and twelve of order 4, and 14 proper subgroups: 〈e〉, three of order 2,seven of order 4 (six of which are cyclic), three isomorphic to C4 × C2.
For the second group H if we take a, b as the generators, we have usingthe semi-direct product construction a4 = b4 = e, arbs = bsar if 2 | rs, andarbs = b3sar if 2 - rs. The non-neutral elements of H are:
a2, b2, ab, ab3, a3b, a2b2, a3b3 [order 2], and
a, b, a3, b3, ab2, a2b, a2b3, a3b2 [order 4].
There are 23 subgroups (〈e〉, seven of order 2, four cyclic of order 4, sevenof type T2, three of order 8, and H), all are Abelian except H itself, elevenare normal, the centre is 〈a2, b2〉, with order 4, and the three of order 8 are:〈a, b2〉, 〈a2, b〉 (' C4 ×C2) and 〈a2, b2, ab〉 which is elementary Abelian. Onepresentations of H is
〈a, b | a4 = b4 = e, b3a = ab〉,
see Problem 8.12.

514 Solution Appendix Answers and Solutions to Problems
Problem 7.21 By the Sylow theory and Theorem 6.9, G has a uniquenormal cyclic subgroup P of order q, either 1 or q cyclic subgroups of orderp each of which have intersection 〈e〉 with Q. If J is a subgroup of order p,by Lagrange’s Theorem (Theorem 2.27), G = PJ , and so G ' J o P . Ifthere is only one subgroup J , it is normal (by the Sylow theory), and so Gis the direct product of J and P and, as both of these are cyclic, G ' Cpqby Theorem 7.6. Also by the Sylow theory, G can only have q subgroups Jif p | q − 1. So you have to show that if this condition is satisfied, then therecan only be one non-Abelian group (up to isomorphism) of order pq.
Using the semi-direct product theory you need to consider the possiblehomomorphisms ξ from J ' Cp to AutP ' Cq−1. If the condition above wasnot satisfied the only possible homomorphism would be the trivial one, andthe product would be direct. As AutP is cyclic, the image of J under ξ isthe unique cyclic subgroup of order p. For uniqueness use Problem 7.18.
Problem 7.22 G ' C12 : 〈e〉, C2, C3, C4, C6, and G; all unique.
G ' C6 × C2 : 〈e〉, C2 – 3 copies, C3, T2, C6 – 3 copies, and G.
G ' D6 : 〈e〉, C2 – 7 copies, C3, T2 – 3 copies, C6, D3 – 2 copies and G.The centre is 〈a3〉, the derived subgroup is 〈a2〉, and the Fitting subgroup is〈a〉 (note that D3 is not nilpotent),
G ' Q3 : 〈e〉, C2, C3, C4 – 3 copies, C6, and G. The centre is 〈a3〉, thederived subgroup is 〈a2〉, and the Fitting subgroup is 〈a〉.
See Problem 3.10 for A4; the centre is 〈e〉, and the derived and Fittingsubgroups are both isomorphic to the unique subgroup of order 4.
Subgroup lattice diagrams for these groups are given on pages 552 to 556.
Problem 7.23 (a) In this case 〈a〉 ∩ 〈b〉 = 〈e〉, and as 〈b〉 is maximal, it isnormal (Theorem 6.5). Hence G ' 〈a〉o 〈b〉.
(b) We have (aZ(G))p = Z(G), ap ∈ Z(G) with ap 6= e; and so ap = btp.
(c) Replacement gives ap = b−p and we still have a 6∈ 〈b〉. By Problem 6.5,G′ = Z(G), and by Problem 2.17 we have (ab)p = apbp[b, a]p(p−1)/2 = e.
(d) Use (c).
(e) By the Sylow theory AutCp2 has a unique Sylow p-subgroup of orderp. So there is a injective homomorphism from Cp → AutCp2 , and any twosuch have the same image. Now use the quoted problem.
Problem 7.24 Follow the method given. We have 84 = 4 · 3 · 7, n3 ≡ 1(mod 3) and n | 28 by the Sylow theory. Hence by hypothesis we have n3 = 28.But then [G : NG(P )] = 28 if P is a Sylow 3-subgroup, hence NG(P ) =P = CG(P ) as P is Abelian. Therefore the main condition for Burnside’sNormal Complement Theorem (Theorem 6.17) applies, and P has a normalcomplement J of order 28. Note also G has 56 elements of order 3, so only28 of order different from 3. Further n7 ≡ 1 (mod 7) and n7 | 12 which showsthat n7 = 1 and G has a unique (normal) subgroup K of order 7.

Solutions 8 515
Solutions 8
Problem 8.1 (a) The largest factor groups are as follows: D3 for S4(the smallest non-neutral normal subgroup is V with order 4); A4 for SL2(3)(Problem 3.4); and D6 for E, note that 〈a2〉 / E.
(b) Centralisers. For S4 we have C((1, 2)) = 〈(1, 2), (3, 4)〉, C((1, 2, 3)) =〈(1, 2, 3)〉, C((1, 2, 3, 4)) = 〈(1, 2, 3, 4)〉 and C((1, 2)(3, 4)) = 〈(1, 4, 2, 3), (1, 2)〉' D4; for SL2(3) we have C(a3) = SL2(3) [the centre], C(a2) = 〈a〉 [order6], C(ab) = 〈ab〉, and C(a) = 〈a〉; and for E we have C(a2) = E [the centre],C(a) = C(b) = C(c) = C(bc) = 〈a2, bc〉 ' C6 × C2, C(ac) = 〈ac〉 andC(abc) = 〈abca2〉 [order 4].
(c) Normalisers. In S4 we have
N(〈(1, 2)〉) = 〈(1, 2), (3, 4)〉,N(〈(1, 2, 3)〉) = 〈(1, 2, 3), (2, 3)〉 ' D3,
N(〈(1, 2, 3, 4)〉) = N(〈(1, 2), (3, 4)〉) = N(〈(1, 2)(3, 4)〉)= 〈(1, 2, 3, 4), (2, 4)〉 ' D4,
also 〈(1, 2, 3), (2, 3)〉 andD4 are self-normalising, and the normalisers of V andA4 are both equal to S4. For SL2(3) we have N(〈a2〉) = 〈a〉, N(〈ab〉) = Q2,〈a〉 is self-normalising, and the normalisers of 〈a3〉 and Q2 are both equal toSL2(3). For E we have: all subgroups with a ‘1’ in the diagram on page 180have E as their normaliser,N(〈b〉) = 〈a2, bc〉,N(〈abc〉) = 〈abc, a2〉,N(〈ac〉) =N(〈a2, abc〉) = 〈ac, b〉, N(〈c, ab〉) = 〈a2c, ab〉 [order 12], N(〈bc〉) = 〈a2, bc〉,and 〈ac, b〉 is self-normalising.
Problem � 8.2 By Sylow 4, n2 ≡ 1 (mod 2) and n2 | 3, and so n2 = 1 or3. If it equals 1 the result follows, so suppose it is 3 and let P1, P2 and P3 bethe three Sylow 2-subgroups. By Theorem 5.8, if J = P1 ∩ P2,
o(P1P2)o(J) = o(P1)o(P2), (8.1)
and as P1P2 ⊆ G, we have 24o(J) ≥ 64, or o(J) ≥ 4. But o(J) < 8 asP1 6= P2, and so o(J) = 4. Now as the indices are 2, we have J / P1 andJ / P2 (Problem 2.19). Also NG(J) is the largest subgroup of G in which Jis normal (Problem 5.13(i)), hence
P1, P2 ≤ NG(J), so 〈P1, P2〉 ≤ NG(J).
Further P1P2 ⊆ 〈P1, P2〉 (note P1P2 is not a subgroup), and so by (8.1)o(〈P1, P2〉) ≥ 16. But the largest proper subgroup of G has order at most 12,and so both 〈P1, P2〉 and NG(J) equal G, and J/ G. In the examples discussedin this chapter V / S4 where o(V ) = 4, Q2 / SL2(3) where o(Q2) = 8, and〈a2, b〉 / E where o(〈a2, b〉) = 4.
Problem 8.3 (i) As ab = ba2 we have ab2 = ba2b = baba2 = b2a4 = b2a,and a2b = aba2 = ba which gives a2b2 = bab = b2a2. Hence b2 commutes witha, and the elements of the group are

516 Solution Appendix Answers and Solutions to Problems
e; b4 [2]; a, a2 [3]; b2, b6 [4]; ab4, a2b4 [6];
b, b3, b5, b7, ab, ab3, ab5, ab7, a2b, a2b3, a2b5, a2b7 [8]; ab2, ab6, a2b2, a2b6 [12],
where the figures in square brackets denote the orders of the elements orsubgroups (see below).
(ii) Subgroups The cyclic subgroups are
〈e〉, 〈b4〉 [2], 〈a〉 [3], 〈b2〉 [4], 〈ab4〉 [6], 〈b〉, 〈ab〉, 〈a2b〉 [8] and 〈ab2〉 [12].
There are no other proper non-neutral subgroups because the group has onlyone element of order 2, and three of order 4, and C2 ×C2, D3, C4 ×C2, C2 ×C2×C2, D4, C6×C2, A4, Q3 and D6 all have more than one element of order2. Also Q2, which has exactly one element of order 2, has six elements oforder 4.
Sylow subgroups They are 〈a〉 of order three, unique so normal; and〈b〉, 〈ab〉, 〈a2b〉 cyclic of order eight, so not normal. Note all other subgroupsare normal because b2 commutes with a.
(iii) Centre 〈b2〉 with order four, and b2 commutes with a, but b does notcommute with a.
Derived subgroup [a, b] = a2b7ab = a and [b, a] = a, so F ′3,8 = 〈a〉.(iv) Semi-direct product Let A = 〈b〉 and K = 〈a〉, then F3,8 = AK,A ∩
K = 〈e〉, A ≤ F3,8 and K / F3,8. Also AutK ' C2 = 〈t〉, say, so there aretwo homomorphisms. The first (trivial) associates the identity automorphismwith all elements of A (giving the direct product C8×C3), and the second γ,say, maps b2k to e and b2k+1 to t, and so brasbuav = br+u(as(buγ))av whichagrees with the product in F3,8.
(v) Frattini subgroup The maximal subgroups are 〈b〉, 〈ab〉, 〈a2b〉 and〈ab2〉, hence Φ(G) = 〈b2〉 with order 4.
Fitting subgroup The maximal normal cyclic (so nilpotent) subgroup is〈ab2〉 with order 12.
Problem 8.4 (i) We have c = dcdcd and d = cdcdc, and so
d(cd)12 = (dcdcd)(cdcdc)(dcdcd)(cdcdc)(dcdcd) = cdcdc = d
which gives (cd)12 = e and so c8 = d8 = e.
(ii) We have (c3d)3 = (c2cd)3 = (cd)12 = e, c(c3d)c−1 = (cd)8 = (c3d)2.These show that the elements of G are:
e; c4; c3d, d3c; c2, c6; c7d (= d6cd), d7c (= c6dc)
c, d, c3, d3, c5, d5, c7, d7, cdc, c3dc, c5dc, c7dc; cd, dc, c5d, d5c.
Note that c7d = (cd)10 (use c = dcdcd three times) so (c7d)6 = (cd)60 = e,and (cdc)8 = cdc2 · · · c2dc = cd22c = cd6c = c(cd)9c = c8 = e et cetera. Theorders of the elements in this list and that given in Problem 8.3 agree.

Solutions 8 517
(iii) Map G→ F3,8 by setting a 7→ c3d and b 7→ c, the calculations abovegive the relations of F3,8, and as the orders agree we see that G ' F3,8. Thereverse map F3,8 → G is given by c 7→ b and d 7→ b5a.
Further F3,8 ≤ S11 which follows if we set a 7→ (9, 10, 11) and b 7→(1, 2, 3, 4, 5, 6, 7, 8)(9, 10), or c = b and d 7→ (1, 6, 3, 8, 5, 2, 7, 4)(9, 11). Wealso have F3,8 ≤ U3(3), see Chapter 12.
Problem 8.5 (i) Consider involutions, S4 has two types: 2-cycles with sixin all, and 2-cycles × 2-cycles with a total of three. An automorphism mapsinvolutions to involutions, but also as the classes are different sizes (6 and3) an automorphism must map 2-cycles to 2-cycles. Note further by Lemma3.5 that S4 is generated by its 2-cycles. If the automorphism θ maps (1, 2) to(i, j), then this is given by the conjugation (1, i)(2, j)(1, 2)(1, i)(2, j) = (i, j)where if, for example, i = 1 we treat (1, i) as the identity perm. This givesthe result. For the general Sn case see Rotman [1994] page 158.
(ii) Using the given substitutions and the relations of the second presen-tation we have a2 = (c1a1)2 = e, b3 = a61 = e and ab = c1a
31 = c1 which gives
(ab)4 = e. Conversely again using the given substitutions and the relationsof the first presentation we have a31 = b6 = e, c41 = (ab)4 = e, c1a1 = ab3 = aso (c1a1)2 = e,
(b1c1)2 = abab2ababab2ab = abab(bababab)bab = (ab)4 = e
as bababab = a,
(a1b1)2 = b2abab2b2abab2 = b2(ab)4b = b3 = e,
and lastly
b31 = abab(babab)(babab)b = abab(ab2a)(ab2a)b = (ab)4 = e,
as a2 = b3 = e and babab = ab2a.
Problem 8.6 (i) We have as above a31 = a6 = e, b1a1b1 = b4a2b4 =ba2b and a1b1a1 = a2b4a2 = bab6ab = ba2b using a2 = bab. Now usingthe permutation representation we see that a1 7→ (3, 7, 6)(4, 8, 5) and b1 7→(1, 4, 6)(2, 3, 5) which after some checking gives a = b21a1b
21 and b = a1b
21a1.
(ii) Clearly SL2(3) 6≤ S4 (as Z(S4) = 〈e〉). Suppose SL2(3) ≤ S5. A Sylow2-subgroup of SL2(3) is isomorphic to Q2, and is a subgroup of a Sylow 2-subgroup, P , say, of S5 by Sylow 5. But P ' D4 6' Q2. A similar argumentapplies for both S6 and S7 because in each case its Sylow 2-subgroups areisomorphic to D4×C2, and Q2 would form a normal subgroup of one of these.Remember that Q2 only has one element of order 2.
Problem 8.7 We have seen that E ≤ A7 and clearly A7 ≤ A8. We alsohave A8 ' L4(2), see Problem 12.13, hence E is isomorphic to a subgroupof L4(2). The three matrices at the top of the next page clearly belong toGL4(2) ' L4(2) and the satisfy the relations in the definition of the group Egiven by (8.6) on page 177.

518 Solution Appendix Answers and Solutions to Problems
A =
0 1 0 11 0 0 10 0 0 11 1 1 0
, B =
0 1 0 01 0 0 00 0 0 10 0 1 0
, C =
0 0 0 10 0 1 00 1 1 01 0 0 1
.
Problem 8.8 (i) We have a5 = bab and b = aba, so the elements arear and arb for 0 ≤ r < 12 where bar = a12−rb. This gives one element oforder 1, one of order 2, two of order 3, 14 of order 4, two of order 6 and fourof order 12. There are 18 subgroups including: 〈as〉 for s = 1, 2, 3, 4 and 6,〈asb〉 for 0 ≤ s ≤ 5 all of which are cyclic, 〈a3, atb〉 ' Q2 for t = 0, 1, 2, and〈a2, aub〉 ' Q3 for u = 0 or 3. So all subgroups are either cyclic or dicyclic.The centre is 〈a6〉, of order 2, and the derived subgroup is 〈a2〉 of order 6.
(ii) Follow the method given in the question.
Problem 8.9 One way to study this group is by its representation
A4 × C2 ' 〈(1, 2, 3), (1, 2)(3, 4)(5, 6)〉,
a subgroup of S6. It also has the presentation: 〈a, b | a3 = b2 = [a, b]2 = e〉, tosee this map a 7→ (1, 2, 3) and b 7→ (1, 2)(3, 4)(5, 6), then [a, b] 7→ (1, 3)(2, 4).The elements are:
e – order 1;
b, aba2, a2ba, a2bab, aba2b, ababa, (ab)3 – order 2;
a, a2, bab, ba2b, (ab)2, (ba2)2, (ba)2, (a2b)2 – order 3; and
ab, ba, a2b, ba2, aba, a2ba2, babab, ba2ba2b – order 6;
so the group has elements of order 1, 2, 3 and 6 only. The element ababab =bababa maps to (5, 6), and the set {e, aba2b, a2bab, ababa} forms a normalsubgroup corresponding to V in A4. The other normal (proper, non-neutral)subgroups are U = 〈(5, 6)〉, 〈V, (5, 6)〉 and A4. The maximal subgroups areA4, 〈V, (5, 6)〉 and four of order six: 〈(5, 6), C〉 where C is a 3-cycle in A4.There are 26 subgroups in all in twelve conjugacy classes. The centre is 〈(ab)3〉with order 2, and the derived subgroup is V . Further note that
(a) the group can be represented as: C3 o C32 , see Problem 8.10;
(b) it has a second permutation representation: 〈(1, 2, 3, 4, 5, 6), (1, 4)〉which is transitive a subgroup of S6, and so it has a very different naturecompared with one fixing one element of the underlying set; and
(c) it is the only non-Abelian group of order 24 with no elements oforder 4.
Problem 8.10 Let K be the unique Sylow 3-subgroup, it is normal bySylow 3. The Sylow theory also implies that G has at least one subgroup Hof order 8. Clearly H ∩K = 〈e〉 and G = HK (consider the orders). Hence Gcan be represented as a semi-direct product of H by K. There are five choicesfor H (see Section 6.1), and Aut (K) ' C2 (Theorem 4.23). Hence we canlist all groups of order 24 with a unique Sylow 3-subgroup by listing all non-isomorphic semi-direct products of H by C3(' K) where o(H) = 8. That is

Solutions 8 519
we need to find all homomorphisms mapping H → C2 = 〈t〉 where o(H) = 8.This further implies that we need to consider the (normal) subgroups of order4 in the subgroups H. We consider each of these in turn, see Section 6.1. Itwill also help to refer to Lemma 7.15 and Theorem 7.17.
H = C8 = 〈a〉. Two homomorphisms: trivial (giving C24 ' C8×C3),and γ1 where a2rγ1 = e and a2r+1γ1 = t (giving F3,8, Problem 8.3).
H = C4 × C2 = 〈a〉 × 〈b〉. Three homomorphisms: trivial (givingC12 × C2), second mapping elements of the cyclic subgroup of order4 (of H) to the identity automorphism (giving D3 × C4), and thirdmapping elements of the subgroup isomorphic to T2 to the identity au-tomorphism (giving Q3 × C2).
H = C2 × C2 × C2 = 〈a〉 × 〈b〉 × 〈c〉. Four homomorphisms: trivial(giving C6 ×C2 ×C2), second mapping elements of a copy of T2 to theidentity automorphism (giving D6 × C2); as H in this case has threesubgroups all isomorphic to T2, the third and fourth homomorphismsare similar and give rise to the same group D6 × C2.
H = D4 = 〈a, b | a4 = b2 = e, ba = a3b〉. Four homomorphisms: triv-ial (giving D4 × C3), second mapping elements of the cyclic subgroupof order 4 (of H) to the identity automorphism (giving D12), third andfourth both mapping a copy of T2 (note D4 has two such subgroups) tothe identity automorphism (both giving E).
H = Q2 = 〈a, b | a2 = b2 = (ab)2〉. Four homomorphisms: trivial (giv-ing Q2×C3). Also in this case the subgroup H has three distinct cyclicsubgroups of order 4 so we have three distinct automorphisms eachmapping one of these cyclic subgroups to the identity automorphism,and also each give rise to the group Q6.
Problem 8.11 As the group G has four Sylow 3-subgroups, n3 = 4, soby the Sylow theory if P is a Sylow 3-subgroup, o(NG(P )) = 6. A group oforder 6 has a unique normal subgroup of order 3, so the intersection of thenormalisers of two Sylow p-subgroups has order 1 or 2. Hence by Theorem5.15, G/core(NG(P )) is isomorphic to a subgroup of S4, as [G : NG(P )] = 4.If the core has order 1, then G is isomorphic to a subgroup of S4. But it hasorder 24 and so is isomorphic to S4.
If the core (Problem 1.24) of NG(P ) has order 2, then for a similar reasonto that above G/core(NG(P )) ' A4 because A4 is the only subgroup of S4
with order 12. Now A4 has a normal subgroup V of order 4, hence by theCorrespondence Theorem (Theorem 4.16) G has a normal subgroup K oforder 8. Therefore we can express G as a semi-direct product G ' P o Kas P has order 3 and so has no non-neutral element in common with K. Bythe given fact K can only be isomorphic to two of the five possible groups oforder 8, that is C3
2 or Q2. Therefore finally we obtain two further groups oforder 24, they are C3 o C3
2 ' A4 × C2 and C3 oQ2 ' SL2(3). For the firstof these isomorphisms note that A4 can itself be expressed as a semi-directproduct, for we have A4 ' C3 o C2
2 (Section 7.3 and Problem 8.9), and forthe second we can use the results derived in Section 8.2.
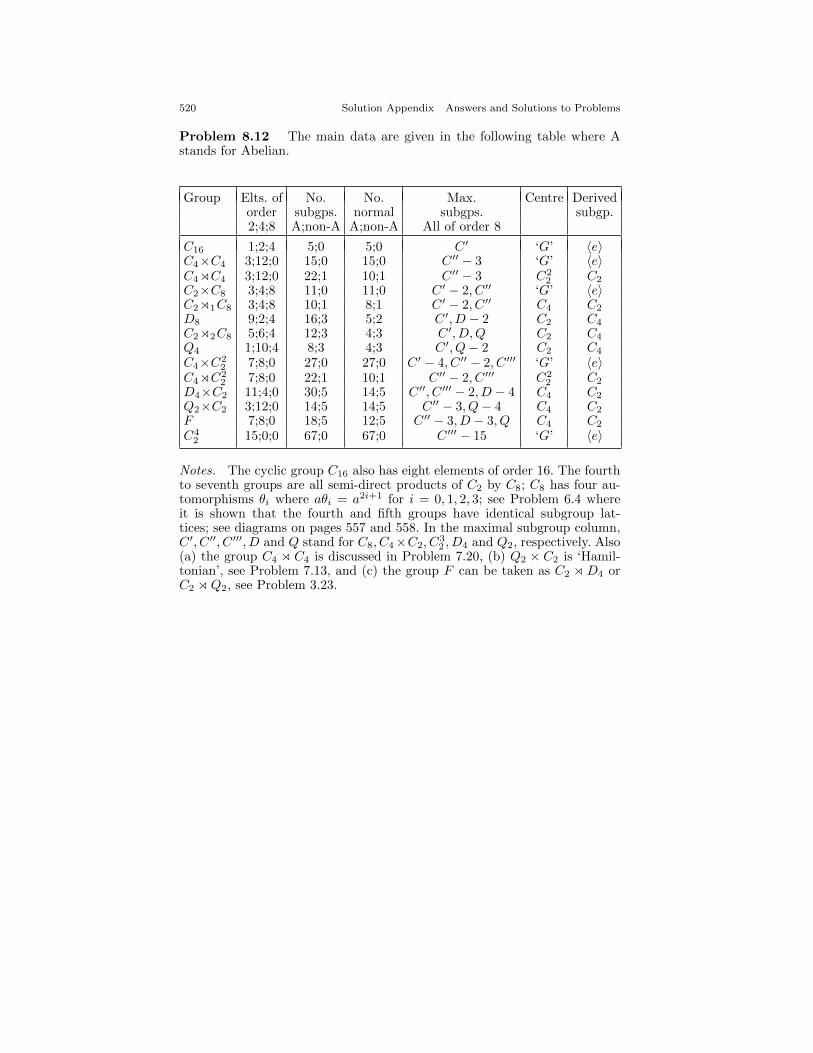
520 Solution Appendix Answers and Solutions to Problems
Problem 8.12 The main data are given in the following table where Astands for Abelian.
Group Elts. of No. No. Max. Centre Derivedorder subgps. normal subgps. subgp.2;4;8 A;non-A A;non-A All of order 8
C16 1;2;4 5;0 5;0 C ′ ‘G’ 〈e〉C4×C4 3;12;0 15;0 15;0 C ′′ − 3 ‘G’ 〈e〉C4oC4 3;12;0 22;1 10;1 C ′′ − 3 C2
2 C2
C2×C8 3;4;8 11;0 11;0 C ′ − 2, C ′′ ‘G’ 〈e〉C2o1C8 3;4;8 10;1 8;1 C ′ − 2, C ′′ C4 C2
D8 9;2;4 16;3 5;2 C ′, D − 2 C2 C4
C2o2C8 5;6;4 12;3 4;3 C ′, D,Q C2 C4
Q4 1;10;4 8;3 4;3 C ′, Q− 2 C2 C4
C4×C22 7;8;0 27;0 27;0 C ′ − 4, C ′′ − 2, C ′′′ ‘G’ 〈e〉
C4oC22 7;8;0 22;1 10;1 C ′′ − 2, C ′′′ C2
2 C2
D4×C2 11;4;0 30;5 14;5 C ′′, C ′′′ − 2, D − 4 C4 C2
Q2×C2 3;12;0 14;5 14;5 C ′′ − 3, Q− 4 C4 C2
F 7;8;0 18;5 12;5 C ′′ − 3, D − 3, Q C4 C2
C42 15;0;0 67;0 67;0 C ′′′ − 15 ‘G’ 〈e〉
Notes. The cyclic group C16 also has eight elements of order 16. The fourthto seventh groups are all semi-direct products of C2 by C8; C8 has four au-tomorphisms θi where aθi = a2i+1 for i = 0, 1, 2, 3; see Problem 6.4 whereit is shown that the fourth and fifth groups have identical subgroup lat-tices; see diagrams on pages 557 and 558. In the maximal subgroup column,C ′, C ′′, C ′′′, D and Q stand for C8, C4×C2, C
32 , D4 and Q2, respectively. Also
(a) the group C4 o C4 is discussed in Problem 7.20, (b) Q2 × C2 is ‘Hamil-tonian’, see Problem 7.13, and (c) the group F can be taken as C2 oD4 orC2 oQ2, see Problem 3.23.

Solutions 9 521
Solutions 9
Problem 9.1 Use the facts that under the equivalence relation (a) the setsof factors are unordered and (b) two equivalent series have the same numberof factors.
Problem 9.2 (ia) 〈e〉 / C2 / V / A4 / S4, there are three different seriesas there are three possibilities for the second factor; see Section 8.1. (ib)〈e〉 / C2 / C2×C2 / A4, again there are three possibilities; see Problem 3.10,(ic) 〈e〉/ C2 / C4 / Q2 / SL2(3), again three possibilities; see Section 8.2. (id)〈e〉 / C3 / C6 / D6 / E, there are six others, see the diagram on page 180.Note that none of these series are normal series, see Problem 9.15.
(ii) C6 and S3 with factors C2 and C3, is the smallest example, there aremany others.
Problem 9.3 Suppose the given composition series for G is 〈e〉/ H1 / · · ·/Hm = G. By Problem 2.14, the series 〈e〉 ∩K / H1 ∩K / · · · / Hm ∩K = Kis a subnormal series which, after the removal of redundant terms forms acomposition series for K; use Lemma 9.2 to check this. Also 〈e〉 = 〈e〉K/K /H1K/K / · · · / HmK/K = G/K can similarly be made into a compositionseries for G/K. Now using the Correspondence Theorem (Theorem 4.16) onG with normal subgroup K we can construct a subnormal series from K toG, and combining these two series gives the result.
Problem 9.4 (i) If G is finite, use Theorem 9.3. If not, refer to the WebAppendix to Chapter 7. If G contains infinite order elements, it cannot havea composition series because Z does not have one (if K / Z then Z/K ' Z;see Theorem 4.19). If the group is countable and all elements have finiteorder, then infinite direct products are involved. So for example, the groupCp × Cp × . . . with infinitely many factors Cp clearly does not have a com-position series (which must have finite length).
A full proof of this result needs more facts about infinite Abelian groupsthan are given in the book; see for example Kaplansky [1969] for more infor-mation.
(ii) If Cpn = 〈a〉, then the only composition series is
〈e〉 / 〈apn−1
〉 / 〈apn−2
〉 / · · · / 〈ap〉 / 〈a〉
with all factors isomorphic to Cp, see Problem 4.20.
(iii) If F is finite use Theorem 9.3(i), and if F is infinite then the argumentused to show that Z does not have a composition series can be applied.
(iv) Use Web Problem 3.31, the group A(N) is simple, and so has a twoterm composition series, and Z is a subgroup with no composition series.
Problem � 9.5 (i) If a composition series has the form · · ·/ Gi/ Gi+1/ · · ·where o(Gi+1/Gi) = pq . . . then, as the group is finite Abelian, we can inserta new term between Gi and Gi+1 with a factor of order p contradicting the

522 Solution Appendix Answers and solutions to problems
definition of a composition series.
(ii) This is similar to (i) using Theorem 6.5.
Problem 9.6 (i) Suppose G has two composition series:
〈e〉 / H / G and 〈e〉 / J / G, (9.2)
where H 6= J . Now H and J are simple by Theorem 9.3. By Lemma 9.2we have 〈e〉 / H ∩ J / H, but both series in (9.2) are composition series, soH ∩J = 〈e〉, also by Problem 2.19 we have H / HJ / G, hence HJ = G. Nowuse Theorem 7.4. In fact this shows that G ' H × J .
(ii) See for example Problem 9.4(ii) with n large.
Problem 9.7 Refinements are 〈e〉 / pqZ / pZ / Z, and 〈e〉 / pqZ / qZ / Z,with factors isomorphic to pqZ, Cp and Cq.
Problem � 9.8 (i) If H / H1 / · · · / G is a subnormal series from H toG, then by Lemma 4.14(i) H ∩ J / H1 ∩ J / · · · / G ∩ J = J is the requiredseries.
(ii) Use (i).
(iii) Use the Correspondence Theorem (Theorem 4.16).
Problem 9.9 (i) Use Definition 9.9 and Lagrange’s Theorem (Theorem2.27).
(ii) Use (i) and induction.
Problem 9.10 (i) There are two cases: the direct product C3×C2×C2, andD6 = 〈a, b | a6 = b2 = e, bab = a5〉. In this second case 〈a2〉 ' C3 / D6 and〈a3, b〉 ' C2 × C2. Note that C3 has only two automorphisms, and Theorem9.17 applied in this case gives k0 = e, (a, b)ξ = e for all a, b, and so allextensions are semidirect.
Problem 9.11 (i) This follows immediately from the Basis Theorem forFinite Abelian Groups (Theorem 7.12).
(ii) The group Z has just two automorphisms: the identity map, and the‘minus map’ where a 7→ −a. Also in Theorem 9.17, k0 = e and so all ex-tensions are semidirect. Hence we obtain two extensions: the direct productZ × C2, and the infinite dihedral group; see Problem 3.20. In this secondcase if we take {0, 1} with addition modulo 2 as a representation of C2, theoperation is given by:
(0, x)(0, y) = (0, x+ y), (1, x)(0, y) = (1, x+ y),
(0, x)(1, y) = (1,−x+ y), (1, x)(1, y) = (0,−x+ y)
for all x, y ∈ Z.
Problem 9.12 Note that Q2 has three normal subgroups isomorphic toC4 and one isomorphic to C2, so four possible definitions by extensions. Ineach case the intersection property for a semidirect product fails.

Solutions 9 523
Problem 9.13 (a) We have (e, e)(a, k) = (ea, (e, a)ξ � eϑa � k) = (a, k).
(b) Using the definitions we have
(a, k)(a, k)−1 =(aa−1, (a, a−1)ξ�kϑa−1�
(((a−1, a)ξ)−1�k−1
)ϑ−1a
)= (e, z),
say. Now as ϑa is an automorphism, if zϑa = e then z = e. Applying ϑa to zwe obtain using (iii) in Definition 9.14 in the second line
zϑa = ((a, a−1)ξ)ϑa � kϑa−1ϑa � ((a−1, a)ξ)−1 � k−1
= ((a, a−1)ξ)ϑa �(
((a−1, a)ξ)−1 � k � (a−1, a)ξ)� ((a−1, a)ξ)−1 � k−1
= ((a, a−1)ξ)ϑa � ((a−1, a)ξ)−1 = e,
using (ii) in Definition 9.14 with a1 = a3 = a and a2 = a−1.
Problem 9.14 Suppose o(G) = pq where p < q, so G has a normalSylow q-subgroup P , say, and 1 or q Sylow p-subgroups. In the first caseG ' Cp × Cq(' Cpq). In the second case G is a cyclic extension of P by asubgroup of G with order p. But as (p, q) = 1, applying Theorem 9.17 wehave k0 = e, and so all extensions are semidirect. The theory will provideseveral but they are all isomorphic. Note that as o(Aut (P )) = q − 1, thecondition p | q − 1 is necessary for the map ψ in Theorem 9.17 to exist.
Problem 9.15 (i) Use the fact that if G has a chief series, H and K arenormal subgroups of G, and H < K, then K/H is a chief factor for G if andonly if it is a minimal normal subgroup of G/K.
(ii) Use induction and the Correspondence Theorem (Theorem 4.16), thereis little to prove if the group is simple.
(iii) Again use the Correspondence Theorem and a property of minimalnormality.
(iv) Let K be a minimal normal subgroup of G, and H1 be a maximalnormal subgroup of K, note K/H1 is simple. Further, let H1, . . . ,Hj be theconjugates of H1 in G; each Hi is maximal normal in K as K / G. Show thatK/Hi are mutually isomorphic and, using a conjugation argument, show that
H1 ∩ · · · ∩Hj = 〈e〉.
Now using induction on i prove that K/(H1 ∩ · · · ∩ Hi) is isomorphic to adirect product of copies of K/H1. The result follows by putting i = r.
(va) 〈e〉 / V / A4 / S4, this has one less term than the correspondingcomposition series;
(vb) 〈e〉 / V / A4;
(vc) 〈e〉 / C22 / C
32 / A4 × C2;
(vd) 〈e〉 / 〈a3〉 / 〈ab, ba〉 / SL2(3);
(ve) 〈e〉 / 〈c〉 / 〈a2c〉 / 〈a, c〉 / E.

524 Solution Appendix Answers and Solutions to Problems
Solutions 10
Problem � 10.1 We have if g ∈ Zn+1, then gZn ∈ Z(G/Zn) whichimplies that gZn commutes with aZn for all a ∈ G, that is [a, g] ∈ Zn. Thisargument reverses.
Problem 10.2 (i) S4 is centreless so its hypercentre is 〈e〉. The hypercentrefor SL2(3) is its centre, and for E it is 〈a2, b〉 ' C2 × C2 (and so not thecentre); to prove these facts use Problem 10.1.
(ii) Suppose Dn = 〈a, b | an = b2 = e, bab = an−1〉. If n = 2k then o(Dn) =2k+1, so Dn is a 2-group, and hence nilpotent (Theorem 10.6). If n = 2kr
where r > 1 is odd, then o(a2k
) = r, o(b) = 2, and ba2k
= a2k(u−1)b. Now
apply Theorem 10.9(ix). This second part can also be established by showingthat the Sylow 2-subgroups are not normal and using Theorem 10.9(vii)
(iii) Use Problem 3.15(iv) and Definition 10.1, or see Robinson (1982),page 123.
(iv) By Definitions 10.1 and 10.5 we have Dn+1(G) = [. . . [[G,G], G] . . . , G]= 〈e〉, (n+ 1 copies of G) if, and only if, G is nilpotent with class n.
Problem 10.3 Elements of the group G can be treated as infinite se-quences z = (g1, . . . , gi, . . . ) where gi ∈ Hi for all i, and gi = e for all butfinitely many positive integers i. The product is component-wise as in thefinite direct case. As each gi has order a power of p, each z also has an orderwhich is a power of p because it only has finitely many non-neutral entries.Hence G is a p-group, and Hn is isomorphic to a subgroup of G. Now considersequences with an element of Hn at the n-entry and e in all other entries.
Suppose G is nilpotent with class m and n > m. So we have a group ofnilpotency class m with a subgroup of larger nilpotency class, that is n. Butthis is impossible for an easy extension of of Theorem 10.6(iii) shows that thenilpotency class of a subgroup cannot be larger than the nilpotency class ofthe group itself.
Problem � 10.4 (i) If the nilpotency class number r is 1, then G′ = 〈e〉.If r > 1, then by the inductive hypothesis H/Z(H) = G/Z(G) which givesG = HZ(G). Now using Problem 2.17 we have
G′ = [HZ(G), HZ(G)] = H ′ and so G = HG′ = HH ′ = H.
(ii) If the nilpotency class number is r, then
H ≤ HZ1(G) ≤ HZ2(G) ≤ · · · ≤ HZr(G) = HG = G
is a subnormal series. Also H normalises HZi(G) and Zi+1(G) normalisesHZi(G) because
[Zi+1, HZi(G)] ≤ [Zi+1(G), G] ≤ Zi(G) ≤ HZi(G).
Now use Theorem 10.9.

Solutions 10 525
Problem � 10.5 (i) For fixed g ∈ G we have aθ = [g, a] for a ∈ G.Now abθ = g−1b−1a−1gab and aθbθ = g−1a−1gag−1b−1gb. These are equal ifb−1a−1ga = a−1gag−1b−1g or
(a−1gag−1)b−1(ga−1g−1a)b = [a, g−1]b−1[g−1, a]b = e.
But G has nilpotency class 2, and so G′ ≤ Z(G) which implies that thisequation is indeed true by Problem 2.17(i). Hence θ is an endomorphismof G. Now clearly ker θ = CG(g), and therefore this centraliser is a normalsubgroup of G.
(ii) Use the definitions and the proof methods applied in the derivation ofTheorem 10.6.
(iii) If D2n = 〈a, b : a2n
= b2 = (ab)2 = e〉, then the lower central seriesfor D2n is
D2n , 〈a2〉, 〈a4〉, . . . , 〈a2n−1
〉, 〈e〉hence the nilpotency class is n.
Problem 10.6 This can be done by repeating the proof of Theorem 10.4.In the first part replace Dr+1 by Hr+1 and show that Hr+1 ≤ Zs−r, and inthe second part replace Zt by Ht and show that D(s+1)−t ≤ Ht.
Problem � 10.7 If G is nilpotent, then G/J is also nilpotent by Theorem10.6(iv). Conversely if G/J is nilpotent, and H ≤ G, then by Theorem 10.9(v)we have HJ/J / / G/J , and so HJ / / G by the Correspondence Theorem(Theorem 4.16). But as J ≤ Z(G), we also have H/ HJ which gives H/ / G.The result now follows by using Theorem 10.9(v) again.
Problem � 10.8 As G is nilpotent, it is isomorphic to a direct product ofp-groups, its Sylow p-subgroups, where p |n (Theorem 10.9). Also a p-groupof order pr has subgroups of all orders ps where s ≤ r. Using the primefactorisation of m and these results we can construct a direct product oforder m via Lemma 7.5 which will form a subgroup of order m in G.
Problem 10.9 (xii) This was given by Problem 10.7.
(xiii) and (xiv) We show that Theorem 10.9(iv) implies (xiii) implies (xiv)implies (xii). The first implication follows from Lemma 5.21 using Problem7.4.
For the second implication we argue as follows. Suppose (xiii) holds andassume that G 6= 〈e〉, then Z(G) 6= 〈e〉. A factor group of G also satisfies(xiii). So using induction on o(G) we have if K / G, either K/Z(K) ' 〈e〉 or[K/Z(K), G/Z(G)] < K/Z(K) by (xiii). In the first case we have K ≤ Z(G)and [K,G] ' 〈e〉 < K, and in the second case [K,G] < K follows becausethe derived subgroup of a group is a characteristic subgroup of that group(Problem 4.22). So in both cases we have (xiv).
Now suppose (xiv) holds. Let G > 〈e〉 and let L be a minimal normalsubgroup of G; see page 235. As [L,G] / G (see Theorem 2.30) we obtain[L,G] = 〈e〉 and so
L ≤ Z(G).
526 Solution Appendix Answers and Solutions to Problems
Now suppose L < K/G and [K/L,G/L] = K/L. This givesK = [K,G]L. (Tosee this use: if θ is an endomorphism of G and a, b ∈ G, then [a, b]θ = [aθ, bθ].)This implies
[K,G] = [[K,G], G].
Applying (xiv) this property shows that [K,G] = 〈e〉, and so K = L whichcontradicts our supposition. We can also use this argument to show that G/Ksatisfies (xiv). Therefore by applying induction on o(G) we may suppose G/Kis nilpotent. But then using by Problem 10.7, we see finally that the originalgroup G is nilpotent.
Problem 10.10 (i) Let a ∈ H1, b ∈ H2 and c ∈ H3, then by hypothesis
c−1[b, c−1, a]c ∈ K and a−1[c, a−1, b]a ∈ K.
Using the Hall-Witt Identity (Problem 2.17) these show that
b−1[a, b−1, c]b ∈ K and so [a, b−1, c] ∈ K
as K / G. Hence for all a, b, c ∈ K we have [a, b, c] ∈ K. But [H2, H3, H1] =[H3, H2, H1] and [H3, H1, H2] = [H1, H3, H2], and so [[a, b−1], c] = [b, a, c] ∈K. Now note that in general if ai, bj ∈ G and J = 〈. . . , ai, . . . , bj , . . .〉 then[a1, . . . , am, b1, . . . , bn] can be expressed as a product of terms of the formj−1r,s [ar, bs]jr,s where 1 ≤ r ≤ m, 1 ≤ s ≤ n and jr,s ∈ J . These j elementsdepend on the order of the terms in the product. Therefore we have
[H1, H2, H3] = [[H1, H2], H3] ∈ K.
(ii) This follows directly from (i) with K = 〈e〉.(iii) Using the fact: z−1[x, y]z = [z−1xz, z−1yz] when x, y, z ∈ G and
Lemma 3.14(iii), as Hi / G we have [H2, H3, H1][H3, H1, H2] is also normal,and so the result follows from (i).
(iv) Use the method suggested.
(v) Use induction on i. First we have [D1(G),Zj(G)] = [G,Zj(G)] ≤Zj−1(G) for all j, see page 211. For the inductive step applying the ThreeSubgroup Lemma we obtain (where we write Di for Di(G) et cetera.)
[Di+1,Zj ] = [[Di, G],Zj ] ≤ [[G,Zj ],Di][[Zj ,Di], G]
≤ [Zj−1,Di][Zj−i, G] ≤ Zj−(i+1).
Problem 10.11 (i) Note that by Problem 10.10(v) [Di(G),Zi(G)] = 〈e〉.But
D(j+1)−i(G) ≤ Zi(G)
(see the proof of Theorem 10.4), and so [Di(G),D(j+1)−i(G)] = 〈e〉 whichgives the result.
(ii) We have where all products run from 0 to n (note that some carefulconsideration using Problem 2.17 is needed for the first equality)

Solutions 10 527
[Ln, G] =∏
[[Kn−i,Ki], G] ≤∏
[Kn−i, [Ki, G]] [[Kn−i, G],Ki]
≤∏
[Kn−i,Ki+1][Ki,Kn−(i+1)] ≤ Ln+1.
(iii) By assumption we have Dl+1(G) ≤ L0 = K ′, and so
Kl+2i+1 ≤ Dl+2i ≤ L2i−1 ≤ [K,Ki].
Hence if
Ki ≤ Di+1(G) ≤ Dj+1(K) then Kl+2i+1 ≤ Dl+2i(G) ≤ Dj+2(K).
But Kl ≤ Dl+1(G) ≤ K1, and so by induction on j we obtain
Ki ≤ Di+1(G) ≤ Dj(K) when i = (2j − 1)l − 2j−1 + 1.
Finally use the given hypothesis that K has nilpotency class j.
Problem 10.12 (i) As Z0(G) = 〈e〉 and Zr(G) = G for some integer r,there exists minimal s ≤ r such that K∩Zs(G) 6= 〈e〉. As K/ G we have [K∩Zs(G), G] ≤K∩[Zs(G), G] ≤ K∩Zs−1(G) = 〈e〉, that is [K∩Zs(G), G] = 〈e〉and so K ∩Zs(G) ≤ Z(G), the result follows as this group clearly belongs toK. This can also be derived using the methods of Chapter 5.
(ii) Use (i) and the fact that H ∩ Z(G) / H since subgroups of Z(G) arenormal in G (Problem 2.14(ii)) and H ≤ G.
(iii) The subgroup J is Abelian, so J ≤ CG(J). For converse, supposeCG(J)\J is not empty. As J / G, we have by Problem 5.8, g−1CG(J)g =CG(J) for all g ∈ G, so CG(J) / G. Hence by the Correspondence Theorem(Theorem 4.16) CG(J)/J is a non-neutral normal subgroup of G/J . Applying(i) we can find a coset hJ ∈ (CG(J)/J) ∩ Z(G/J), and using Theorem 4.16again we have 〈J, h〉 is a normal Abelian subgroup of G strictly containing Jcontradicting the maximality of J .
Problem 10.13 For A5: 〈e〉 and 〈e〉; for C32: C16 (cyclic groups haveunique maximal subgroups) and C32; for D12 = 〈a, b | a12 = b2 = (ab)2 = e〉:〈a6〉 ' C2 and 〈a〉 ' C12, and for Sn: 〈e〉 (Problem 3.9), and C2 × C2 ifn = 4 (Section 8.1) and 〈e〉 if n > 4 (in which case there are no non-neutralnormal nilpotent subgroups – the only subnormal subgroups are symmetricor alternating).
Problem � 10.14 Suppose K ≤ Φ(G) and H < G. There is a maximal Lsuch that H ≤ L < G, and K ≤ L. Therefore HK ≤ L < G, a contradiction.Conversely suppose K 6≤ Φ(G). So G 6= 〈e〉, and by definition there is amaximal subgroup M of G with the property K 6≤M . Hence M < MK ≤ Gby Lemma 4.14. Now the maximality of M implies that MK = G as requiredin the problem.
Problem 10.15 (i) Use the fact that if H,J ≤ G and θ is a endomorphismof G (a map G→ G), then (H ∩ J)θ ≤ Hθ ∩ Jθ.

528 Solution Appendix Answers and Solutions to Problems
(ii) This example was suggested by Ben Fairbairn. Let G be the groupof all 2 × 2 upper-triangular matrices with determinant 1 defined over F9
(Problems 3.15 and 12.1). The subgroup H = {(1 x0 1
): x ∈ F9} is normal
in G. It has order 9 and it is the unique Sylow 3-subgroup in G. Also thesubgroup J of diagonal matrices in G is cyclic and has order 8. (It forms aSylow 2-subgroup, there are nine in all with generators
(c x0 c7
)one for each
x ∈ F9 where c is a multiplicative generator of F9.) It follows easily that G isisomorphic to the semi-direct product J oH. Two other normal subgroupsare given as follows: H ′ = {
(a x0 a
): x ∈ F9, a = 1 or 2} with order 18, and
H ′′ = {(y x0 z
): x ∈ F9, {y, z} = {1, 1}, {2, 2}, {c2, c6} or {c6, c2} } with order
36.
The maximal subgroups of G are H ′′ and the nine Sylow 2-subgroups,and so Φ(G) =
(2 00 2
)' C2. Incidentally this subgroup is also isomorphic to
Z(G). Now as H ′ / G, we can define an endomorphism ϑ : G → C4 in theusual way. (The four cosets of H ′ in G are generated by
(c 00 c7
)H ′ and its
second, third and fourth powers. As Φ(G) ≤ H ′, we have Φ(G)ϑ ' 〈e〉, butΦ(Gϑ) ' Φ(C4) ' C2.
Problem � 10.16 Let P be a Sylow p-subgroup of J . This gives KP/K isa Sylow p-subgroup of J/K (see Problem 6.10). Now as J/K is nilpotent, wehave KP/K is a characteristic subgroup of J/K, and so KP / G. Also P is aSylow p-subgroup of KP , and hence using the Frattini Argument (Theorem6.14) we have G = NG(P )K ≤ NGΦ(G). By Lemma 10.14 this shows thatG = NG(P ) and P / G. As this argument holds for all Sylow subgroups of Gthe result follows by Theorem 10.9(vii).
Problem 10.17 IfG = H×J and L is a maximal subgroup ofH, then L×Jis a maximal subgroup of G, see Problem 7.3(ii). Therefore Φ(G) ≤ L × J ,and so Φ(G) ≤ Φ(H)× J . This gives the result.
Problem 10.18 (i) If G = S4 then Φ(G) = 〈e〉. We also have H =〈(1, 2, 3, 4), (1, 3)〉 < G and H is isomorphic to D4. Therefore Φ(H) = 〈a2〉 6≤〈e〉 = Φ(G).
(ii) Note first that the question needs to be amended so that K is a propersubgroup of Φ(H). Suppose K 6≤ Φ(G), so there exists a maximal subgroupL of G with K 6≤ L and G = KL (as L is maximal). Hence H = H ∩KL =(H ∩ L)K (by Problem 2.18(i)), so H = H ∩ L (by Theorem 10.12) that isH ≤ L. This gives K ≤ Φ(H) ≤ H ≤ L ≤ G contradicting our hypothesis.
(iii) Use (ii).
Problem 10.19 (i) Let J be minimal subject to the condition: G = JK.We have J ∩ K / J as K is normal, and J ∩ K / K as K is Abelian, soJ ∩ K / JK = G. If we assume that J ∩ K ≤ Φ(H), then by Problem10.18(ii) J ∩K ≤ Φ(G) ∩K = 〈e〉 by hypothesis, and we have the requiredsubgroup. Hence suppose J∩K 6≤ H for some H which is a maximal subgroupof J . But in this case J = H(J ∩K) and G = JK = HK which contradictsthe minimality of J . Therefore our assumption is valid.
(ii) One example from Chapter 8 is as follows. Using the notation of Section8.3 let G = E, then Φ(G) = 〈a2〉, so let K = 〈c〉. In this case we can take
Solutions 10 529
J = 〈a, b〉. Note that this phenomenon can also occur if Φ(G) = 〈e〉, forexample if G = S4. Let K = V , the subgroup generated by the 2-cycles ×2-cycles, and then we can take J = 〈(1, 2, 3), (1, 2)〉; there are four choices forthe subgroup J .
Problem 10.20 (i) If g ∈ G then by conjugation g induces an automor-phism, θg say, of K, that is θg is a homomorphism G→ Aut (K). We have
Kθg = Inn (K) ≤ (Φ(G))θg ≤ Φ(Gθg)
using Problem 10.15. But Inn (K)/ Aut (K) (Theorem 5.26), and so by Prob-lem 10.18(ii) we have Inn (K) ≤ Φ(Aut (K)).
(ii) Put K = Φ(G) in (i).
(iii) If D4 = 〈a, b : a4 = b2 = (ab)2 = e〉, then Φ(D4) = 〈a2〉 ' C2, andInn (D4) ' C2 × C2 (see page 84). Now apply (ii) with G = D4.
Problem 10.21 (i) Let H be a maximal subgroup of G, then by Theorem6.6 we have H / G and [G : H] = p. This shows that G/H is Abelian,and so G′ ≤ H (Problem 4.6). Also G′ has exponent p, and so ap ∈ H for alla ∈ G. Hence G′Gp ≤ Φ(G). Conversely, note first that G/G′Gp is an Abeliangroup with exponent p and so can be treated as a vector space over Fp, andΦ(G/G′Gp) = 〈e〉 (Lemma 10.19). Also if J / G and J ≤ Φ(G), then Φ(G)is the inverse image (using the natural map) of Φ(G/J) because, via theCorrespondence Theorem (Theorem 4.16), maximal subgroups correspond.Now the reverse inclusion Φ(G) ≤ G′Gp follows.
(ii) As G′Gp = Φ(G), the factor group G/Φ(G) is an Abelian group withexponent p which can be treated as as vector space over Fp.
Problem 10.22 (i) If a, g ∈ G, then [a, gp] = [a, g]p = e and so gp ∈ Z(G).Consequently every element of G/Z(G) has order p and as G is a finite p-group we see that G/Z(G) is an elementary Abelian p-group.
(ii) We have o(Z(G)) 6= 1 by Lemma 5.14, it is not p2 by Problem 4.15 (forotherwise G/Z(G) would be cyclic), and it is not p3 as G is not Abelian. SoZ(G) is cyclic with order p. Also by Theorem 10.1, G′ ≤ Z(G), and G′ 6= 〈e〉as G is not Abelian, hence G′ = Z(G). Now use Problem 10.21 to show thatΦ(G) = G′.
Problem 10.23 (i) One method uses Problem 10.21(i). If p = 2 we showthat all commutators belong to G2. Suppose o(a) = 2k and o(b) = 2l. Now
[a, b] = a2k−1b2
l−1ab = a2k−2ab2
l−1ab2l−1b2 = (a2
k−1−1)2(ab2l−1)2b2,
a product of squares. This shows that Φ(G) ≤ G2, now apply Problem 10.21for the reverse inequality.
(ii) Let p = 3 in the second group given in Problem 6.5, that is ES2(3)generated by a, b and c. Here all elements x satisfy x3 = e, so 〈x3 |x ∈ G〉 =〈e〉 whilst Φ(G) = 〈c〉; see Problem 10.22. The first group in Problem 6.5,ES1(3), does satisfy the condition given in (i).
530 Solution Appendix Answers and Solutions to Problems
Problem 10.24 (i) Use Problem 9.16 withK = Φ(G) and J/K = F(G/K).As J/K is nilpotent (Theorem 10.22 and Definition 10.23), the quoted prob-lem shows that J is nilpotent, which implies F(G/Φ(G)) ≤ F(G)/Φ(G). Forthe converse, as F(G) is nilpotent, we see that F(G)/Φ(G)) is a nilpotent sub-group of G/Φ(G). Hence F(G)/Φ(G) ≤ F(G/Φ(G)) which gives the result.
(ii) For S4 we have Φ(S4) = 〈e〉, and so the result is trivial in thiscase. For SL2(3) we have Φ(SL2(3)) ' C2 (which also equals the cen-tre) and F(SL2(3)) ' Q2. Now Q2/C2 ' C2 × C2, and SL2(3)/C2 ' A4
(Problem 4.4). Now note that F(A4) is the largest nilpotent normal sub-group of A4 that is C2 × C2 generated by the 2-cycles × 2-cycles. For Ewe have Φ(E) ' C2 and F(E) ' C6 × C2. Now clearly F(E)/Φ(E) ' C6.We also have E/Φ(E) ' D6, and the largest nilpotent normal subgroup ofD6 = 〈a, b : a6 = b2 = (ab)2 = e〉 is 〈a〉 ' C6. For the details on theseconstructions see Chapter 8.
Problem 10.25 (i) Let i be the largest integer satisfying K ∩G(i) 6= 〈e〉;see page 234. So (K ∩G(i))′ ≤ K ∩G(i+1) = 〈e〉, and it follows that K ∩G(i)
is Abelian and is normal in G.
(ii) Suppose first CG(F(G)) 6≤ F(G). By (i) we can find J so that J/F(G) /G/F(G), F(G) < J ≤ CG(F(G))F(G), and J/F(G) is Abelian. Now J =J ∩ (CG(F(G)) = (J ∩ CG(F(G)))F(G) by Problem 2.18. This shows that
D3(J ∩ CG(F(G))) ≤ [J ′, CG(F(G))] ≤ [F(G), CG(F(G))] = 〈e〉,
which in turn shows that J ∩ CG(F(G)) ≤ F(G) and J = F(G). This con-tradiction now shows that CG(F(G)) ≤ F(G) which in turn implies thatCG(F(G)) = Z(F(G)).
(iii) As G is soluble it contains a non-neutral normal subgroup, this followsfrom (i).
(iv) Use Problem 10.24(i) and (iii).
Problem 10.26 (i) 〈e〉 / C3 / S3 is a supersoluble series for S3. But S4 isnot supersoluble, its normal series 〈e〉 / V / A4 / S4 has a non-cyclic factorV ' T2.
(ii) Assume S = (H0, . . . ,Hm) is a supersoluble series for G. Its factorsare cyclic, so suppose Hi+1/Hi ' Ck. Now S can be refined by insertingnew terms between Hi and Hi+1 so that the new factors have prime orderscorresponding the the prime factors of k. This can be done for all factors inS.
(iii) See the proofs of Theorems 11.2 and 11.3. Now see (i). The group Vis finite Abelian so supersoluble, and S4/V ' S3 is also supersoluble, but S4
is not supersoluble.
(iv) If J0, . . . Jm and K0, . . . ,Kn are supersoluble series for G and H,respectively, then
J0 ×K0, . . . Jm ×K0, Jm ×K1, . . . , Jm ×Kn
is a supersoluble series for G×H.

Solutions 10 531
(v) Finite p-groups are supersoluble by Theorem 6.4. So the result holdsby this, (iv), and Theorem 10.9(viii). Now note that S3 is not nilpotent, andS4 is not supersoluble.
(vi) Let H0, . . . ,Hm be a supersoluble series for G, and let Ji = Hi ∩G′.Now J0, . . . , Jm is a supersoluble series for G′. Also if g ∈ G then g inducesan automorphism of Ji+1/Ji (by conjugation), so
G/L � Aut (Ji+1/Ji) where L/Ji = CG/Ji(Ji+1/Ji).
But Ji+1/Ji is cyclic (by definition), so by Theorem 4.23 it follows that G/Lis Abelian. Therefore L ≥ G′ (Problem 4.6), and hence
Ji+1/Ji ≤ Z(G′/Ji),
that is J0, . . . , Jm is an upper central series for G′.
(vii) Suppose H0, . . . ,Hm is a supersoluble series for G/K, and θ is thenatural homomorphism G to G/K, then
〈e〉 / H0θ−1 = K / H1θ
−1 / · · · / Hmθ−1 = G
is a supersoluble series for G.
(viii) Zappa has shown that the terms of a supersoluble series can berearranged so that the all of the factors of odd order come first followed bythose of even order. This can now be used to prove the result, see the quotedreference.
(ix) This is a substantial problem, try to establish each of the followingpropositions in turn. (a) IfG is supersoluble, then all of its maximal subgroupshave prime index in G. (b) Using induction on o(G) and Problem 11.9(ii),show that all subgroups of G are reverse Lagrange. (c) For the converse,again use induction on o(G). Note first that G has at least one normal Sylowp-subgroup P where p | o(G). (d) Use the inductive hypothesis and Hall’sTheorems (Chapter 10) to show that G/P is supersoluble. (e) By hypothesis,there exists a subgroup L of G with [G : L] = p. Prove that L ∩ P / G andG/(L ∩ P ) is supersoluble. (f) Suppose we can choose a subgroup K of GsatisfyingK/G, K ≤ L∩P and o(K) is as small as possible. NowK = 〈e〉 andwe can complete the argument. But if K 6= 〈e〉, then [K,P ] < K, so considerthe chief factor (see Problem 9.15) K/M of L with [K,P ] ≤M < K, and usethis to show that K = 〈e〉. For further details see Rose [1978], page 292.
(x) The real numbers R form an example of a non-supersoluble Abeliangroup. This group does not have a finite series with cyclic (finite or infinite)factors, in any such series at least one factor must be uncountable. Of courseall finite Abelian groups are supersoluble.

532 Solution Appendix Answers and Solutions to Problems
Solutions 11
Problem 11.1 (ia) Coefficients are rational, so we may assume that theleading coefficient is 1, hence the cubic has the form f(y) = y3 + ry2 + sy+ twhere r, s, t ∈ Q. Put y = x− r/3.
(ib) Use0 = (u+ v)3 + a(u+ v) + b
= u3 + 3u2v + 3uv2 + v3 + au+ av + b
= u3 + v3 + (u+ v)(3uv + a) + b.
(ic) Set v = −a/3u, then 2u3 = −b+√
(b2 + 4a3/27).
(iia and b) For (iia) proceed as above and for (iib) we have
x4 + ax2 + bx+ c = (x2 + rx+ s)(x2 + ux+ t)
= x4 + (r + u)x3 + (s+ t+ ru)x2 + (rt+ su)x+ st,
so put r + u = 0, s + t − r2 = a, r(t − s) = b and st = c. Second and thirdequations give 2t = r2 + a + b/r and 2s = r2 + a − b/r. So fourth gives4c = 4st = (r2 + a+ b/r)(r2 + a− b/r) = r4 + 2ar2 + a2 − b2/r2.
Problem 11.2 (ia) Suppose Dn = 〈a, b | an = b2 = e, bab = an−1〉. Wehave 〈a〉 / Dn and Dn/〈a〉 ' C2. Now use Theorems 11.4 and 11.6.
(ib) This is similar to (ia).
(ic) We have 〈e〉 / V / A4 / S4 is a soluble series for S4; see Section 8.1.
(ii) By Lemma 7.3 and Theorem 7.4, G / G × H and (G × H)/G ' H.This can also be done by combining the soluble series for G and H and usingproperties of the direct product.
Problem 11.3 (i) By Problem 3.19, the only subnormal series for SL2(5)with more than two terms is: 〈e〉 / C2 / SL2(5), and so this series is a com-position series for SL2(5) (use the Jordan-Holder Theorem (Theorem 9.5)).Hence SL2(5)/C2 is simple (in fact it is isomorphic to A5, see Problem 6.16).Therefore SL2(5) is not soluble.
(ii) If o(G) = p < 200, then G ' Cp which is soluble. If o(G) < 60 oro(G) = 60 and G 6' A5, then use Problems 6.15 and 6.16, and Theorem 11.4.This can be extended to groups satisfying o(G) < 120. At least three non-soluble groups of order 120 exist, they include S5, SL2(5), A5 × C2. Thereis a (unique) simple (and so non-soluble) group of order 168, see Problem12.7, and at least one of order 180, that is A5 × C3. In fact these six groupscomplete the list of non-soluble groups of order less than 200, a fair amountof checking is needed to establish this; see the GAP program and Section 6.7in the Atlas.
Problem 11.4 Suppose G is the smallest non-soluble group of order p2q2
or pnq. IfG is not simple, it has a normal subgroupK where 1 < o(K) < o(G),and by minimality it is soluble; as is G/K for the same reason. We can nowuse Theorem 11.4.

Solutions 11 533
Case 1 – o(G) = pnq. Using the first part and the Sylow theory we havenp = q, so let P1 and P2 be distinct Sylow p-subgroups of G and let L =P1 ∩ P2. There are two subcases. Subcase 1 – for all choices of P1 and P2,L = 〈e〉. In this case G has q(pn − 1) elements of order a power p, and soonly q others. But G has at least one Sylow q-subgroup of order q, and as itis unique it is normal contradicting the simplicity of G. Subcase 2 L 6= 〈e〉,we may suppose L has maximal order. It is a p-group so nilpotent, hence byTheorem 10.9(iv), if
Mi = NG(Pi), we have L / M = 〈M1,M2〉.
By Sylow 5, if M is a p-group, it is contained in some Sylow p-subgroup ofG, say P ∗. We have
P1 ≤M1 ≤M,
but as P1 is maximal (it has prime index) and P2 ≤M , we see that P1 6= M .Hence M = G and L / G which contradicts the simplicity of G.
Case 2 o(G) = p2q2 with q < p. Here np = q2, and if L is defined asabove and L = 〈e〉 then the same argument applies. So suppose L 6= 〈e〉.In this case each Pi is Abelian, and so L / 〈P1, P2〉 = J , and J 6= G (as Gis simple). This further implies [G : J ] = q, and by Theorem 5.15, we haveo(G) | q! which is impossible as p > q.
Problem � 11.5 (i) Suppose we have . . . / A/ B/ . . . with B/A Abelian,and A / C / B. We can deduce that C/A and B/C are both Abelian usingTheorems 4.16 and 4.17, and Problem 4.6(i).
(ii) Yes. Use the facts that an infinite simple group H has the compositionseries 〈e〉 / H, and a soluble series for an infinite group must have at leastone ‘infinite step’ A / B (where o(B/A) =∞). Consider 〈e〉 / A/A / B/A.
(iii) Use the definition and Theorems 7.12, 7.7 and 6.5.
(iv) Use Problem 9.15.
Problem 11.6 (i) We assume that r, s > 0. Now G has a Sylow q-subgroupP , and Z(P ) > 〈e〉 by Lemma 5.21. Let g ∈ Z(P ) with g 6= e, so P < CG(g)and
o(C`{g}) = [G : CG(g)] = pu
for some integer u. If u = 0 then g ∈ Z(G), and so G is not simple (asZ(G) / G), and if u > 0 then G is not simple by Burnside’s result. Thereforeif o(G) = prqs, then G is not simple. Suppose G is of smallest order such thatG is not soluble. As it is not simple, it has a normal subgroup H of orderpr1qs1 < o(G), so H (and also G/H) are soluble, now use Theorem 11.4.
(ii) Suppose G is not Abelian. If all odd-order groups are soluble and G issimple, then G must have even order.
Conversely if all simple groups have even order and G has odd order thenit possesses a non-neutral proper normal subgroup K, and o(K) and o(G/K)are also odd. Suppose K is smallest (by size of its order) which is not soluble,it will have a normal subgroup H of smaller order, so apply Theorem 11.4 toit and K/H.

534 Solution Appendix Answers and Solutions to Problems
(iii) See Theorem 6.18, the group has a normal cyclic subgroup 〈a〉. Asubstantial number of simple groups come close; for example A5, L2(11) andJ1 have Abelian Sylow subgroups many of which are cyclic.
Problem � 11.7 (i) If G is non-Abelian and soluble, then its derivedseries has at least three terms including 〈e〉 and G, its second from bottomterm will be non-neutral, normal and Abelian by Theorem 11.10.
(ii) If G is not soluble, then its derived series does not reach 〈e〉, that isthere is an integer k such that G(k) = G(k+1) = (G(k))′ giving the requiredperfect subgroup. Note that G itself might be perfect.
Problem 11.8 (i) One example is SL2(3); see Section 8.2.
(ii) A Reverse Lagrange group will have a p-complement for all primesdividing the order of the group, so will be soluble by Hall’s Second Theorem.Or we can argue as follows. First we show that G must have a proper non-neutral normal subgroup. Let o(G) = p1p2 . . . where p1 ≤ p2 ≤ . . . Thereexists a subgroup H of G with [G : H] = p1, so by Theorem 5.15, if core(H) =〈e〉 then G is isomorphic to a subgroup of Sp1 . Hence p1p2 . . . | p1! which isonly possible if p2 = · · · = 1 and G ' Cp1 . Therefore if we exclude thiscase, the subresult follows. Now use induction and Theorem 11.4; start byassuming that G1 is Reverse Lagrange and not soluble, and has the smallestpossible order with these two properties.
Problem � 11.9 (i) The subnormal series 〈e〉 / J / K / G can be refinedto a chief series, see Problem 9.15 (iii) and (iv). By definition, J and K areconsecutive terms in this series, so K/J is elementary Abelian by Problem9.15 again.
(ii) Let J = core(H) and K be minimal subject to the condition J < K.Using the definitions of the core, and of K, we have K 6⊆ H, and so bymaximality of H we have KH = G. Next we show
K ∩H = J. (11.1)
We have J ≤ K ∩H ≤ K and K ∩H / H (Lemma 4.14). So by (i) K/J isAbelian, and by applying the Correspondence Theorem (Theorem 4.16) wehave K ∩H / K. These show that
NG(K ∩H) ≥ 〈K,H〉 = G.
Hence K ∩H / G, and so by the definition of J this gives (11.1). Thereforeusing the Second Isomorphism Theorem (Theorem 4.15) we obtain
[G : H] = [KH : H] = [K : K ∩H] = [K : J ].
Finally by (i) again, as [K : J ] is a prime power so is [G : H].
Problem � 11.10 (i) Use Theorems 4.16 and 11.2 to 11.4.
(ii) Use Lemma 4.14 and (i).
(iii) Yes, let G = A5 × C2. Here A5 forms a maximal normal subgroup.

Solutions 11 535
Problem 11.11 One example is A5×C6 which is not soluble. It has order360, and contains maximal subgroups of index 2, that is A5×C3; of index 3,that is A5 × C2; and of index 5, that is A4 × C6.
Problem 11.12 The group G is soluble, so by Theorem 11.10 if, for somek, G(k) = G(k+1), then G(k) = 〈e〉. The solubility also implies that G(k) = 〈e〉for some k which in turn implies thatG(k−1) is cyclic. Repeating the argumentif necessary we may therefore assume that G(3) = 〈e〉 and so G(2) is cyclic.
By Theorem 11.10, G(2) / G, and so by the N/C theorem (Theorem 5.26)
CG(G(2)) / NG(G(2)) = G and G/CG(G(2)) � AutG(2).
Now G(2) is cyclic, and so by Theorem 4.23, AutG(2) is Abelian, and henceG/CG(G(2)) is also Abelian, which in turn by Problem 4.6(ii) implies
G′ ≤ CG(g(2)), and so G(2) ≤ Z(G′),
by (iv) on page 104. We also have G′/G(2) is cyclic, and so this gives by theCorrespondence Theorem (Theorem 4.16) G′/Z(G′) is cyclic. Therefore usingProblem 4.16(ii) we have: G′ is Abelian and so G(2) = 〈e〉.
Problem 11.13 We show first that G is soluble using induction on o(G),if o(G) = 1 there is nothing to prove. Now let o(G) > 1 and let p0 be thesmallest prime dividing o(G). By Burnside’s Normal Complement Theorem(Theorem 6.17), G has a normal p0-complement K, say, so K/ G and G/K 'P where P is a Sylow p0-subgroup of G. Using Theorem 6.9(i) we see thatall Sylow subgroups of K are cyclic, hence K is soluble by the inductivehypothesis. Further P is a p0-group, and so is soluble. Therefore G is solubleby Theorem 11.4.
Now by Problem 4.6(ii), G(n)/G(n−1) is Abelian for n = 0, 1, . . . , and allof its subgroups are cyclic. Hence they are themselves cyclic, this followsusing the Sylow theory and Problem 4.15(ii). Therefore by Problem 11.12,G(2) = G(3) = 〈e〉 and the result follows.
Problem 11.14 (ia) If G1 is not simple, it has a proper normal subgroupK which is soluble by the definition of G1, as is G1/K for the same reason.But then G1 is soluble by Theorem 11.4.
(ib) Suppose every pair of distinct maximal subgroups has neutral inter-section. Now H1 = NG1(H1), and if o(H1) = m, then H1 has o(G1)/mconjugates all of which have neutral intersection. So the conjugates of H1
have (m − 1)o(G1)/m = o(G1) − o(G1)/m = r non-neutral elements. Asm > 1, we have (o(G1) − 1)/2 < r < o(G1) − 1, but this is impossible aseach non-neutral element of G1 belongs to exactly one maximal subgroup(because of the neutral intersection of the subgroups containing them), andso there are o(G1)− 1 in total.
(ic) Let L = NG1(J), then J 6= NH1
(J) by Theorem 10.7 as J is nilpotent,so J < L ∩H1. By (ia) L < G1, and so it is contained in some maximal Hof G1. It follows that J < L ∩ H1 ≤ H ∩ H1 contradicting the maximality

536 Solution Appendix Answers and Solutions to Problems
property of J .
(id) By (ib and c) the counter-example postulated in (ia) does not exist.
(ii) As finite Abelian groups are nilpotent, (i) shows that G′ < G by The-orem 11.10, and G′ / G by Problem 2.16. But then G′ is Abelian, and soG′′ = 〈e〉.
Problem � 11.15 By Theorem 2.30 we have [H,J ] / G, and by Problem2.16 G′ ≤ [H,J ], hence G′ = [H,J ]. If hi ∈ H and ji ∈ J we have h−12 j1h2 =h3j3 and j−12 h1j2 = j4h4. Note also [h, h′] = e and [h, h′j] = [h, j] as H isAbelian, and so by Problem 2.17(iii) j−1[h, j′]j = [j−1hj, j′], et cetera. Hencewe have
(h2j2)−1[h1, j1]h2j2 = j−12 [h1, h−12 j1h2]j2 = j−12 [h1, h3j3]j2
= j−12 [h1, j3]j2 = [j−12 h1j2, j3] = [j4h4, j3] = [h4, j3],
and similarly
(j2h2)−1[h1, j1]j2h2 = h−12 [j4h4, j2]h2
= h−12 [h4, j1]h2 = [h4, h3j3] = [h4, j3].
This shows that [H,J ] = G′ is Abelian, and so G′′ = 〈e〉 which implies thatG is soluble. Other proof methods are possible.
Problem 11.16 A5 : this group has a 5-complement which is isomorphicto A4, but no 2- or 3-complements, see page 101.
A6 : this group has no p-complements. The maximal subgroups of thisgroup are isomorphic to A5, S4 or C4oC2
3 (with order 36). Hence A6 cannothave subgroups of order 45 (index 8) or 40 (index 9). By Theorem 5.15 itcannot have a subgroup of order 72 (index 5).
L2(7) : this group has a 2-complement isomorphic to F7,3 and a 7-complement isomorphic to S4, but no 3-complement, such a subgroup wouldhave order 56 which is impossible by Theorem 5.15.
Problem 11.17 First note that both S3 and S4 are their own Hall {2, 3}-subgroups. S4 is an example of a Hall {2, 3}-subgroup of S5. A Hall {2, 3}-subgroup of S6 would have index 5 which is impossible by Theorem 5.15. Fi-nally, Problem 3.9 shows that S3×S4 is isomorphic to a Hall {2, 3}-subgroupof S7, and S4 wr C2 (or S4 o C2) is isomorphic to a Hall {2, 3}-subgroup ofS8 (Problem 3.9(iii)).
Problem 11.18 (i) Use the definitions.
(ii) The symmetric group S5 has subgroups isomorphic to C3 generatedby 3-cycles, and C5 generated by 5-cycles, but it has no subgroup of order15, such a subgroup would be isomorphic to C15 but the group contains noelements of order 15.
(iii) A Hall {2, 5}-subgroup of S5 would have order 40, but S5 has nosubgroup of this order (use Theorem 5.15). On the other hand S5 does havea {2, 5}-subgroup of order 20, see Problem 3.11.
Solutions 11 537
(iv) GL3(2) (which is isomorphic to L2(7), see Chapter 12) has two sets ofsubgroups each isomorphic to S4. An example from the first set is generatedby (
1 0 00 1 10 1 0
)and
(1 0 10 1 10 0 1
),
and an example from the second set is generated by(1 1 01 0 00 0 1
)and
(1 1 10 1 00 0 1
).
Note that in both cases the first generating element has order 3, the secondhas order 2, and their products both have order 4; see Problem 3.18. Matricesin the first example above only fix (0, 0, 0) in the 3-dimensional vector spacedefined over F2, that is they only fix one point in the space, but in thesecond example every matrix fixes two points (0, 0, 0) and (0, 0, 1) – a linein the space. For this reason the examples cannot be conjugate, even thoughthey are isomorphic.
(v) The group L2(11) has order 660, and it has non-isomorphic subgroupsof order 12 and index 55 (so Hall {2, 3}-subgroups). For example if the groupis given by the permutation representation stated on page 295, then
D6 ' 〈(1, 3)(2, 7, 11, 5, 10, 9)(4, 8, 6), (1, 3)(2, 11)(4, 8)(5, 9)〉 ≤ L2(11),
A4 ' 〈(1, 3, 2)(4, 6, 5)(7, 9, 8), (1, 3)(2, 11)(4, 8)(5, 9)〉 ≤ L2(11).
Problem � 11.19 (i) Clear.
(ii) Use Problem 2.23.
(iii) Use Problem 2.15.
(iv) Use the Correspondence Theorem (Theorem 4.16).
Problem 11.20 (i) For S4 one example is 〈(1, 2, 3, 4), (1, 3)〉 and 〈(1, 2, 3)〉;for SL2(3) take the copy of Q2 and one of the Sylow 3-subgroups; and for Euse the definition.
(ii) Sylow 3- or 5-subgroups of S5 are cyclic in the form 〈(a, b, c)〉 or〈(a, b, c, d, e)〉, but these never commute.
(iii) Condition 6. Take P1 = 〈(1, 2, 3, 4), (1, 3)〉 as a Sylow 2-subgroup.Condition 7. Use Problem 3.18.
Problem 11.21 This is a project not directly relevant to the chapter, sois left as an exercise for the reader to complete. See Suzuki [1986], pages 102and 103.
538 Solution Appendix Answers and Solutions to Problems
Problems 12
Problem 12.1 We have c3 = 2c + 1, c4 = 2, c5 = 2c, c6 = 2c + 2, c7 =c + 2, c8 = 1, c = 2c + 1, c2 = 2c + 2, c3 = c, c4 = 2, c5 = c7 = c + 2, c6 =c+ 1, c7 = c5 = 2c, c8 = 1, c+ c = c3 + c3 = c4 + c4 = 1, c2 + c2 = c6 + c6 = 0and c5 + c5 = c7 + c7 = 2.
Problem 12.2 Examples of Steiner systems for the given parameters areas follows.
(a) {1, 2, 3} {1, 4, 5} {1, 6, 7} {1, 8, 9} {2, 4, 6} {2, 5, 8}{2, 7, 9} {3, 4, 9} {3, 5, 7} {3, 6, 8} {4, 7, 8} {5, 6, 9}.
(b) {1, 2, 3, 4} {1, 5, 6, 7} {1, 8, 9, 10} {1, 11, 12, 13} {2, 5, 8, 11} {2, 6, 9, 12} {2, 7, 10, 13}{3, 5, 9, 13} {3, 6, 10, 11} {3, 7, 8, 12} {4, 5, 10, 12} {4, 6, 8, 13} {4, 7, 9, 11}.
(c) {1, 2, 3, 4} {1, 2, 5, 6} {1, 2, 7, 8} {1, 3, 5, 7} {1, 3, 6, 8} {1, 4, 5, 8} {1, 4, 6, 7}{2, 3, 5, 8} {2, 3, 6, 7} {2, 4, 6, 8} {2, 4, 5, 7} {3, 4, 5, 6} {3, 4, 7, 8} {5, 6, 7, 8}.
(d)
{1, 2, 3, 4, 5} {1, 2, 3, 6, 7} {1, 2, 3, 8, 9} {1, 2, 3, 10, 11} {1, 2, 4, 6, 9} {1, 2, 4, 7, 10}{1, 2, 4, 8, 11} {1, 2, 5, 6, 11} {1, 2, 5, 7, 8} {1, 2, 5, 9, 10} {1, 2, 6, 8, 10} {1, 2, 7, 9, 11}{1, 3, 4, 6, 8} {1, 3, 4, 7, 11} {1, 3, 4, 9, 10} {1, 3, 5, 6, 10} {1, 3, 5, 7, 9} {1, 3, 5, 8, 11}{1, 3, 6, 9, 11} {1, 3, 7, 8, 10} {1, 4, 5, 6, 7} {1, 4, 5, 8, 10} {1, 4, 5, 9, 11} {1, 4, 6, 10, 11}{1, 4, 7, 8, 9} {1, 5, 6, 8, 9} {1, 5, 7, 10, 11} {1, 6, 7, 8, 11} {1, 6, 7, 9, 10} {1, 8, 9, 10, 11}{2, 3, 4, 6, 11} {2, 3, 4, 7, 9} {2, 3, 4, 8, 10} {2, 3, 5, 6, 8} {2, 3, 5, 7, 10} {2, 3, 5, 9, 11}{2, 3, 6, 9, 10} {2, 3, 7, 8, 11} {2, 4, 5, 6, 10} {2, 4, 5, 8, 9} {2, 4, 5, 7, 11} {2, 4, 6, 7, 8}{2, 4, 9, 10, 11} {2, 5, 6, 7, 9} {2, 5, 8, 10, 11} {2, 6, 7, 10, 11} {2, 6, 8, 9, 11} {2, 7, 8, 9, 10}{3, 4, 5, 6, 9} {3, 4, 5, 7, 8} {3, 4, 5, 10, 11} {3, 4, 6, 7, 10} {3, 4, 8, 9, 11} {3, 5, 6, 7, 11}{3, 5, 8, 9, 10} {3, 6, 7, 8, 9} {3, 6, 8, 10, 11} {3, 7, 9, 10, 11} {4, 5, 6, 8, 11} {4, 5, 7, 9, 10}{4, 6, 7, 9, 11} {4, 6, 8, 9, 10} {4, 7, 8, 10, 11} {5, 6, 7, 8, 10} {5, 6, 9, 10, 11} {5, 7, 8, 9, 11}
This system was constructed ‘ad hoc’ starting with {1, 2, 3, 4, 5}. Other meth-ods are given in the Web Appendix to Chapter 12.
(ii) Two non-isomorphic Steiner systems S(2, 3, 13) with 26 members canbe generated as follows. In each case the first 13 members are (1,3,9) (a subsetof the set of the quadratic residues mod 13) and its twelve translates by themap x 7→ x + 1 giving a set of 13 triples in all. The second set of 13 triplescan be either (1,2,5) or (1,2 11) and their translates under the same map.
(iii) This is a version of S(2, 3, 7).
Problem � 12.3 If u = 1, then we are counting those members of theSteiner system which contain a1. Ignoring a1 these members form a versionof the system S(r − 1, s − 1, t − 1), so use Theorem 12.2 again. Similarly ifu = 2, and we look for the members containing a1 and a2, we have a versionof the system S(r − 2, s− 2, t− 2). Now carry on.
Problem 12.4 (i) A non-singular square matrix can be diagonalised usingelementary row and column operations, and each of these operations can beperformed by pre- or post-multiplying the given matrix by an elementarymatrix. Note that as all matrices in SLn(q) have determinant 1, the elemen-tary operation that multiplies a row or column by a non-zero constant is notrequired. For further details see any standard text of linear algebra.

Solutions 12 539
(ii) Examples are as follows. First, A6 is generated by the perms. a =(1, 2, 3, 4, 5) and b = (1, 4, 6, 3, 2), and a and b satisfy the presentation given.
Secondly, SL2(9) is generated by A =(0 12 c5
)and B =
(c2 1c3 2
)(Problem 12.1),
where A5 = B10 = (AB)4 = (A4B)8 = I2. The group L2(9) can be formedby factoring SL2(9) by its centre Z. This centre contains two elements: I2and
(2 00 2
), so by ‘identifying’ A and −A throughout for A ∈ SL2(9) (consider
the cosets of SL2(9) by its centre) we obtain a group isomorphic to A6. Thiscan also be done by using the presentation for A6 given on page 249. Againworking in SL2(9) we need four 2× 2 matrices Ci which satisfy (CiZ)3 = Zand (CiCjZ)2 = Z for 1 ≤ i, j ≤ 4 where i 6= j. One set is given by(
0 21 1
),
(0 21 2
),
(2 c2
c2 0
),
(1 c2
c2 0
),
where c is a generator of the multiplicative group of the field F9.
Problem � 12.5 With A and B as given we have AB2AB =(
1 0a2p−4−1 1
)and ABAB2 =
(1 a2−10 1
); now take powers and use Lemma 12.8; note that
p ≥ 5. The order of A is p− 1 and the order of B is 3.
Problem 12.6 (i) Straight-forward calculation.
(ii) Note that (0, 0, 1)R = (0, 1, 1) so R maps point 1 to point 2 etcetera, similarly for S. Using the labelling given in pages 253 and 254 wecan associate R with (1, 2, 3, 4, 5, 6, 7) and S with (1, 7)(3, 6). These giveR4S = (1, 5, 2, 3)(4, 7) and RS = (1, 2, 6)(3, 4, 5) as required.
(iii) One solution is a follows. If C = SR3SR5S = (1, 4, 3)(2, 6, 7), then〈R,C〉 ' F7,3, and if D = SR4SR2S = (1, 3, 7)(2, 5, 4), then R4S · D =(1, 4)(2, 7), that is R4S and D generate a subgroup isomorphic to S4, seeProblem 3.18.
Problem 12.7 (i) By Sylow: n7 ≡ 1(mod 7) and n7 | 24, so n7 = 8, andby Theorem 6.10, [G : NG(P )] = 8 and o(NG(P )) = 21. So as H = NG(P )is not Abelian, it is a semi-direct product of C7 by C3 (Section 7.3), that isH ' 〈a, b | a7 = b3 = e, b2ab = a2〉 ' F7,3, ab = ba2 and ba = a4b.
(ii) As o(b) = 3, 〈b〉 is a Sylow 3-subgroup of G. By the Sylow theory,n3 = 4, 7 or 28. n3 6= 4 by Theorem 5.15, n3 6= 7, we leave this as an exercisefor the reader, and so n3 = 28, o(NJ(〈b〉)) = 6 and NJ(〈b〉) ' 〈b, c | b3 = c2 =e, bc = cb2〉.
(iii) We have eight cosets each with 21 elements, so G is the union of thecosets in C provided we can show that they are disjoint. H 6= cH as c 6∈ H,and if cH = acH then cac ∈ H but as H is the normaliser of 〈a〉 this impliesthat c ∈ H which is impossible. Similar arguments cover the remaining cases.
(iv) Premultiplying each member of C by g ∈ G permutes C, and so weobtain an element of S8. Let θ be the corresponding map, this is an injectivehomomorphism, see the first example in Section 5.2. Note that Gθ = Gθ′
as G is simple, and so Gθ ≤ S′8 ' A8. Now aθ = (2, 3, 4, 5, 6, 7, 8) because

540 Solution Appendix Answers and Solutions to Problems
a ∈ H and so aH = H, and a(atcH) = at+1cH. Also as bat = a4tb andbatcH = a4tbcH, we have bθ = (3, 6, 4)(5, 7, 8), as bH = H (note b ∈ H) andb(cH) = cb2H = cH.
(v) and (vi) Continuing as above we have c(H) = cH and c(cH) = c2H =H (as o(c) = 2), so cθ maps 1 to 2 and 2 to 1. Now cθ can map 3 to 5 or 7 or 8.If 3 is mapped to 5, then cθ = (1, 2)(3, 5)(4, 7)(6, 8) with similar expressionsin the other two cases. We have
(3, 6, 4)(5, 7, 8)(1, 2)(3, 5)(4, 7)(6, 8)(3, 4, 6)(5, 8, 7) = (1, 2)(3, 7)(4, 8)(5, 6)
et cetera, this and similar identities gives the equalities, and the result followsbecause we started with an ‘arbitrary’ simple group of order 168.
Problem 12.8 First, the elements of L2(11) are defined as cosets each
containing pairs of matrices of the form(a bc d
)and
(−a −b−c −d
), and so θA has
domain L2(11). We have (a) the map θA is a perm. of P as A ∈ L2(11) isnon-singular; (b) composition of maps corresponds to matrix multiplication,and (c) the identity map z → z corresponds to the identity matrix I2.
For the next part use transvections as discussed in Section 12.2. Note thatα has order 11 and corresponds to the perm. (0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10), βhas order 2 and corresponds to the perm. (0,∞)(1, 10)(2, 5)(3, 7)(4, 8)(6, 9),as we are working over the field F11. If we set a 7→ α and b 7→ β, then therelations in the presentation (12.5) given on page 261 are satisfied.
Problem 12.9 By Theorem 5.15, as L2(11) is simple it cannot have aproper subgroup of index less than 11, that is of order more than 60. ByLagrange’s Theorem (Theorem 2.27) further possible subgroup orders are 55,44, 33, 30, 22, 20, 15 12 and 11 as well as some smaller ones. The group doeshave (maximal) subgroups of orders 60, 55 and 12 and no others.
To see this each possible order must be checked in turn. So for exampleit cannot have subgroups of order 15 or 33 as these would be cyclic but thegroup does not possess elements of order either 15 or 33. Also note that thegroup has no elements of order 4, and products of elements of orders 2 and11 give elements of order 3, 5 or 6. On the positive side there are maximalsubgroups isomorphic to A5, F11,5 and D6.
For A5, one method is as follows: Use the presentation P3 for A5 givenin Web Section 3.6, choose three elements of L2(11) each with order 3 suchthat the orders of their products is 2 in all cases. One example is
(1, 2, 8)(3, 6, 9)(4, 10, 11)(5, 7, 12), (1, 6, 7)(2, 5, 4)(3, 10, 12)(8, 11, 9),
(1, 5, 3)(2, 9, 10)(4, 7, 8)(6, 12, 11).
This can also be done by using P2 from the same Web Section, and choosingtwo elements of order 5 which satisfy the relevant relations. One choice is
(1, 3, 2, 4, 11)(5, 8, 7, 10, 12), (1, 7, 6, 8, 4)(2, 5, 10, 11, 9).
For F11,5 generated by an element a of order 11, and b of order 5, let a bethe cyclic perm. of order 11 given in the previous problem (ie one not using

Solutions 12 541
the symbol∞, here replace∞ by 12 and add one to each finite symbol), andlook for products of two disjoint 5-cycles again not using the symbol ∞. Anexample for b is (1, 7, 6, 8, 4)(2, 5, 10, 11, 9) where b4ab = a9.
Lastly for D6, take b from the previous problem as a generator of or-der 2, and look for an element c of order 6 (that is a product of two dis-joint 6-cycles) to satisfy the D6 relation: bcb = c5. One example for c is(1, 5, 4, 11, 10, 3)(2, 8, 9, 12, 6, 7). As above we have replaced the basic sym-bols 0, 1, . . . , 10 by 1, 2, . . . , 11, and ∞ by 12.
Problem 12.10 First obtain ten equations for the coefficients of an order2 matrix C ∈ L3(3), the first is detC = 1, and the remaining nine equatecorresponding entries in C and C−1. The top row of C can be a triple ofelements from the set {0, 1, 2} allowing repetitions except (0, 0, 0). Show thatfor each of these triples there are three corresponding order 2 matrices, exceptfor the triple (1, 0, 0) when there are nine, and for the triple (2, 0, 0) whenthere are 36. One set of order 2 matrices which generate L3(3) is
A =
(0 1 10 2 01 1 0
), B =
(0 2 11 1 12 1 1
), C =
(1 0 01 2 02 0 2
).
We have o(A) = 2, o(BCBC) = 3, o(AC) = 4, o(BC) = 6, o(ABCBC) =8 and o(ABC) = 13. For the second part note that one (of many) solution is:
〈(5, 6, 7)(8, 9, 10)(11, 12, 13), (1, 5, 2)(3, 6, 11)(4, 7, 8)(9, 12, 13)〉,
and
〈(1, 4)(3, 8)(6, 7)(9, 10), (1, 7)(2, 3)(4, 10)(11, 13), (1, 12)(3, 9)(5, 10)(8, 13)〉.
It has been shown by Malle, Saxl and Wiegel that all finite groups exceptU3(3) can be generated by three involutions, the proof needs CFSG.
12.11 (i) Note that 22 ≡ 1 (mod 3).
(ii) If (aij) belongs to the centraliser of A, then a13 = a31, a11 =a33, 2a12 = a32 and 2a21 = a23. Further as det(Aij) = 1, these give
(a11 + a13)(a22(a11 + 2a13) + a12a21) = 1.
Count the number of solutions over F3; there are 12 if a22 = 0, 18 if a22 = 1,and 18 if a22 = 2. Now use Theorem 5.19.
(iii) Using (ii) and the presentation of GL2(3) given in Problem 3.24, let
a 7→
(0 1 21 1 22 2 0
), b 7→
(0 0 20 2 02 0 0
), c 7→
(1 0 01 1 20 0 1
).
Each of these matrices commute with A, and they generate a copy of GL2(3)in L3(3).

542 Solution Appendix Answers and Solutions to Problems
12.12 (i) Examples are: A4, order 2; (AB)2, order 3; A2, order 4; AB,order 6; B, order 7; A, order 8; and A5BAB, order 12.
(ii) Note that
detC = c3a1a1 + c2a2a2 + c1a3a3 − a1a2a3 − a1a2a3 − c1c2c3 = 1.
Also as C = C−1 we have equating corresponding entries
a1a1 = c1(1 + c2), c1a3 = a1(1 + a2)
a2a2 = c2 + c1c3, c2a2 = a2 + a1a3a3a3 = c3(1 + c2), c3a1 = a3(1 + a2).
Taking a2 equal to each member of F9 in turn, count matrices as follows:
If a2 = 0, then a1a3 = 0 (use the fourth equation above). If a1 = 0, thenc1 6= 0 (C is non-singular), so c2 = 2 (first equation), so a3 = 0 (secondequation). Hence a1 = a2 = a3 = 0, c2 = 2 and c1c3 = 1 (third equation).There are now two possibilities: c1 = c3 = 1 or c1 = c3 = 2 giving two (ofour 63) matrices. The remaining cases are similar. If a2 = 1 then c2 = 0, weobtain four matrices with c1 = c3 = 1 and four with c1 = c3 = 2; if a2 = 2then c2 = 1, with one diagonal matrix, eight upper triangular matrices (withc1 = 1), and eight lower triangular (with c3 = 1); if a2 = c or c3 thenc2 = 1, c1 = c3, with 16 matrices; if a2 = c2 or c6 then c2 = 2, c1 6= c3,a1 = a3 = 0, with four matrices; and if a2 = c5 or c7 then c2 = 0, c1 6= c3,with 16 matrices. Hence we have found all 63 matrices required.
(iii) One example is as follows. Take
c = (5, 8)(6, 7)(9, 12)(10, 11)(13, 16)(14, 15)(17, 20)(18, 19)(21, 24)(22, 23)(25, 28)(26, 27),
then an element of order 4 which commutes with this and belongs to thegroup is
d = (5, 6, 8, 7)(9, 10, 12, 11)(13, 20, 16, 17)(14, 19, 15, 18)(21, 27, 24, 26)(22, 28, 23, 25),
note that its cube also has this property. Now look for elements of the groupwhose first cycle(s) are elements of S4 defined on {1, 2, 3, 4}. You will findthat for each element of S4, say σ = (1, 2, 3), there are four elements of U3(3)which commute with c and begin with the chosen cycle; so for our chosenexample σ they are
(1, 2, 3)(5, 17, 26, 8, 20, 27)(6, 13, 21, 7, 16, 24)(9, 14, 28, 12, 15, 25)(10, 19, 23, 11, 18, 22),
and its product with d, d2 or d3. These four elements form a coset (of order3) of the normal subgroup 〈d〉 in J .
Problem 12.13 For the first proof note that B21 is diagonal with diagonal
entries {a21, a22, a23} so B1 is an involution only if it belongs to the centre; thetop left-hand entry of B2
3 is zero and so B3 cannot be an involution; andif b3 = 0 then B2
2 has diagonal {b21, b2, b2} and the product of these entriesmust equal 1. Apply (a), then use Problem 5.21(iii) as L3(4) / SL3(4) and[SL3(4) : L3(4)] = 3, a prime.

Solutions 12 543
For the second proof note that the order of the centre of the first givenSylow 2-subgroup of L4(2) (with order 64) is 2, whilst the order of the centreof the second given Sylow 2-subgroup, now of L3(4) and again with order 64,is 4. Hence the groups cannot be isomorphic.
Problem 12.14 Use the notation α1, . . . set up in Section 12.4.
(i) Apply conjugation. For this solution we write a \ b for the conjugate of aby b, that is b−1ab. One solution is as follows: α1 = φψ \ θ−1φ−1, α2 = α2
1 \ψ,β2 = ψ3 \φ5νθ4φ, γ1 = ψ2 \ θ4φ3, and γ2 = ν \ γ1β3
2 . For the converse notethat φ = (γ2α1β2γ1)4 \ψα2
2ψ2γ2. For the presentation note that φ\θ = φ4
and θ\ψ = θ2.
(ii) 〈α1, α2〉 ' C3 × C3 is a Sylow 3-subgroup, 〈θ〉 ' C5 is a Sylow 5-subgroup, and 〈φ〉 ' C11 is a Sylow 11-subgroup. For the prime 2 we have:δ8 = γ22 = e and γ2δγ2 = δ3, hence 〈δ, γ2〉 is a Sylow 2-subgroup. It is isomor-phic to a semi-dihedral group of order 16; see Problem 6.4. Note that M11
has 495 Sylow 2-subgroups, 55 Sylow 3-subgroups, 396 Sylow 5-subgroupsand 144 Sylow 11-subgroups.
(iii) One method is as follows. Let ε = δ4 = (1, 4)(2, 6)(3, 5)(8, 9) be thechosen involution. By (i) ε commutes with δ, γ1 and γ2, and so after somecomputer algebra checking we see that CM11
(ε) = 〈δ, γ1, γ2〉 = H with order48. Note M11 has 165 involutions all of which are conjugate, so by Theo-rem 5.19 we have o(H) = 48. Now δ = (1, 2, 9, 3, 4, 6, 8, 5)(10, 11), so if wetake ν = (1, 3, 9)(4, 5, 8)(7, 10, 11) (then δν = (1, 2)(3, 5)(4, 6)(7, 10)) andD = {e, ε}, then δD and νD generate a copy of S4 using the standard cosetproduct. Hence H is isomorphic to an extension of C2 by S4.
(iv) One set of involutions is:
a = (4, 7)(5, 8)(6, 9)(10, 11),
b = (1, 10)(2, 5)(4, 11)(8, 9),
c = (1, 5)(2, 9)(3, 11)(8, 10),
d = (2, 3)(5, 6)(8, 9)(10, 11).
Problem 12.15 (i) The orbits of K under the coset action are permutedby G, and as G is transitive and K is non-neutral, all of these orbits areof the same order p, and K is transitive. From this we see that there is aSylow p-subgroup Q of G which is a subgroup of H. By Sylow 2, all Sylowp-subgroups are conjugate in G, and so they all belong to K as K is normal.Therefore o(K) = pnps where s | t and s > 1. Now use Problem 6.11(ii) toshow that K = G.
(ii) By our first definition, M11 is a transitive subgroup of S11 and it hasorder n = 7920 = 8 · 9 · 10 · 11. We have n/11 = 720 ≡ 5 (mod 11), henceusing (i) we can take t = 5 and n11 = 144 > 1, as n11 ≡ 1 (mod 11). Nowapply (i). For M23 we have n′ = o(M23) = 48 · 20 · 21 · 22 · 23, n′/23 ≡ 11(mod 23), so t = 11, n23 = 40320 > 1, and n23 ≡ 1 (mod 23).
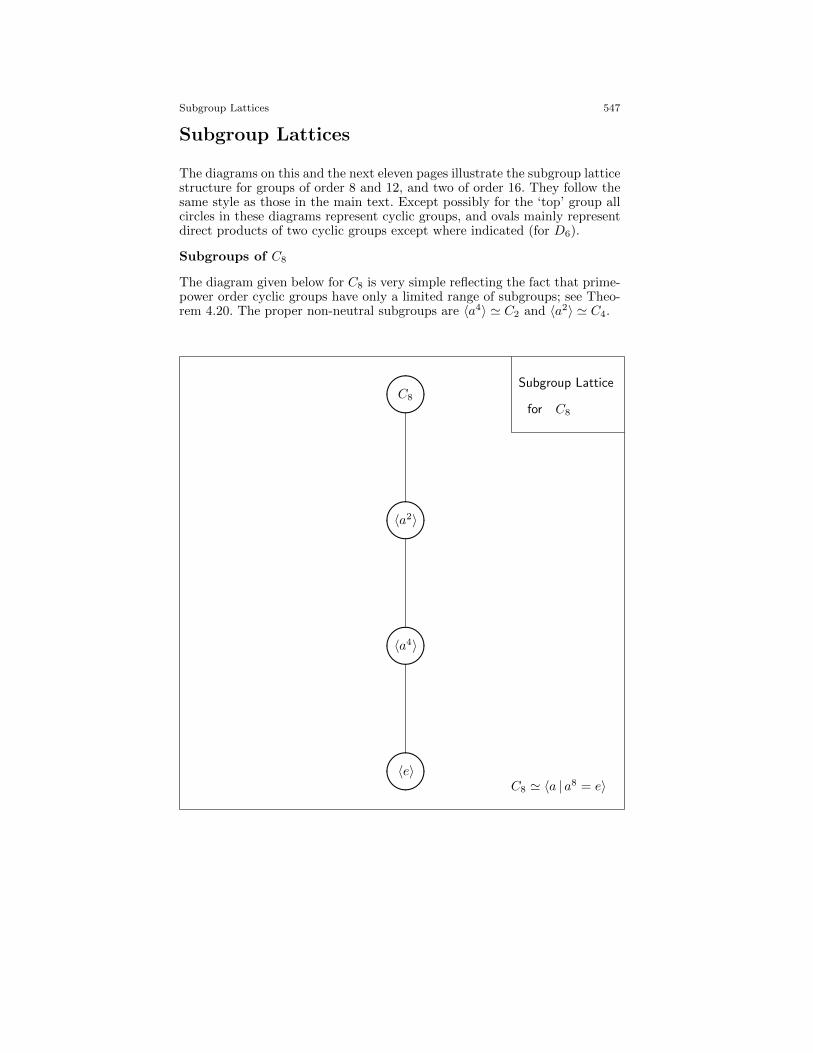
Subgroup Lattices 547
Subgroup Lattices
The diagrams on this and the next eleven pages illustrate the subgroup latticestructure for groups of order 8 and 12, and two of order 16. They follow thesame style as those in the main text. Except possibly for the ‘top’ group allcircles in these diagrams represent cyclic groups, and ovals mainly representdirect products of two cyclic groups except where indicated (for D6).
Subgroups of C8
The diagram given below for C8 is very simple reflecting the fact that prime-power order cyclic groups have only a limited range of subgroups; see Theo-rem 4.20. The proper non-neutral subgroups are 〈a4〉 ' C2 and 〈a2〉 ' C4.
Subgroup Lattice
for C8
����
����
〈e〉
����
����
C8
〈a4〉
〈a2〉
C8 ' 〈a | a8 = e〉
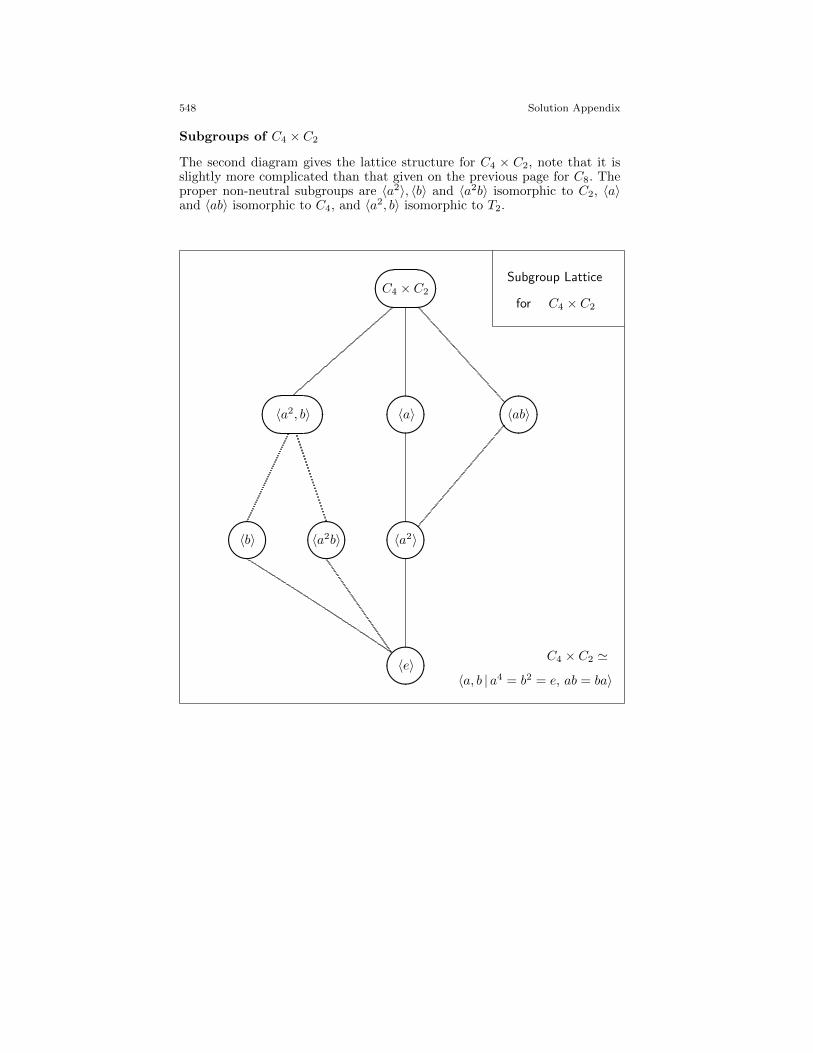
548 Solution Appendix
Subgroups of C4 × C2
The second diagram gives the lattice structure for C4 × C2, note that it isslightly more complicated than that given on the previous page for C8. Theproper non-neutral subgroups are 〈a2〉, 〈b〉 and 〈a2b〉 isomorphic to C2, 〈a〉and 〈ab〉 isomorphic to C4, and 〈a2, b〉 isomorphic to T2.
Subgroup Lattice
for C4 × C2
����
����
〈e〉
����
����
C4 × C2
〈a2〉
〈a〉���� ��
��〈a2, b〉 〈ab〉
����〈a2b〉��
��〈b〉
C4 × C2 '
〈a, b | a4 = b2 = e, ab = ba〉
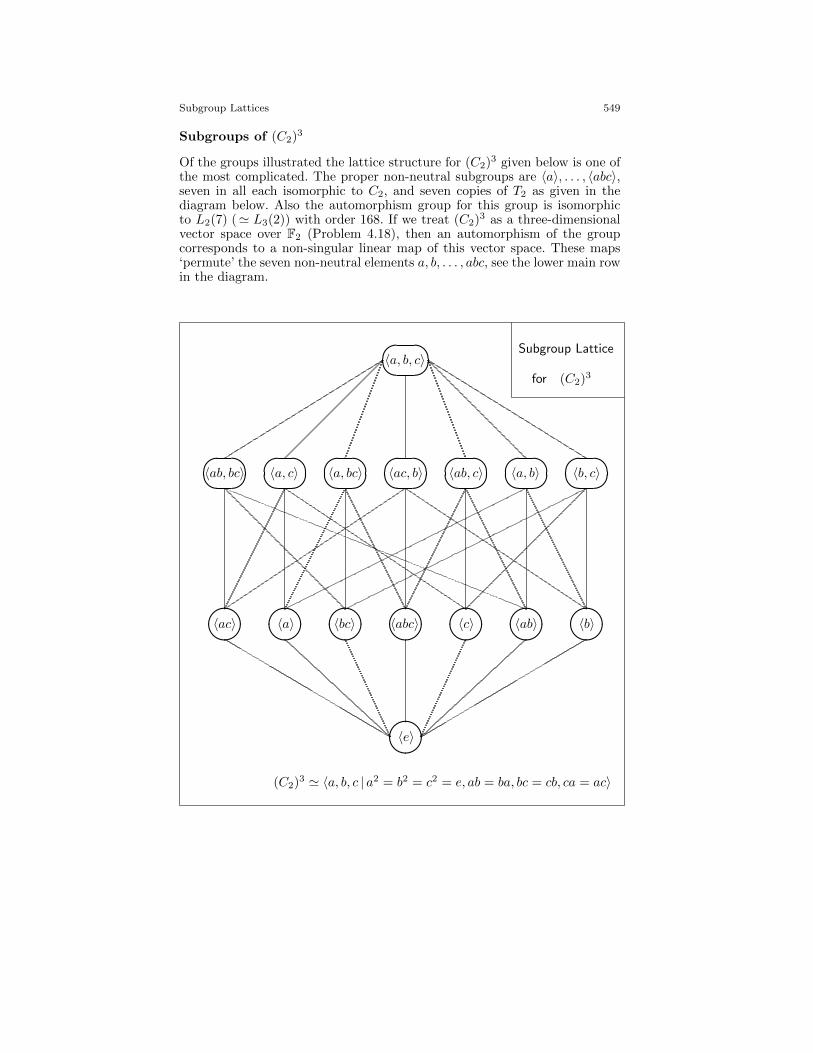
Subgroup Lattices 549
Subgroups of (C2)3
Of the groups illustrated the lattice structure for (C2)3 given below is one ofthe most complicated. The proper non-neutral subgroups are 〈a〉, . . . , 〈abc〉,seven in all each isomorphic to C2, and seven copies of T2 as given in thediagram below. Also the automorphism group for this group is isomorphicto L2(7) (' L3(2)) with order 168. If we treat (C2)3 as a three-dimensionalvector space over F2 (Problem 4.18), then an automorphism of the groupcorresponds to a non-singular linear map of this vector space. These maps‘permute’ the seven non-neutral elements a, b, . . . , abc, see the lower main rowin the diagram.
Subgroup Lattice
for (C2)3
����
����〈a, b, c〉
����〈abc〉��
��〈ac〉 ����〈a〉 ����〈bc〉 ��
��〈c〉 ����〈ab〉 ����〈b〉
����〈ab, bc〉����〈a, c〉����〈a, bc〉����〈ac, b〉����〈ab, c〉����〈a, b〉����〈b, c〉
〈e〉
(C2)3 ' 〈a, b, c | a2 = b2 = c2 = e, ab = ba, bc = cb, ca = ac〉
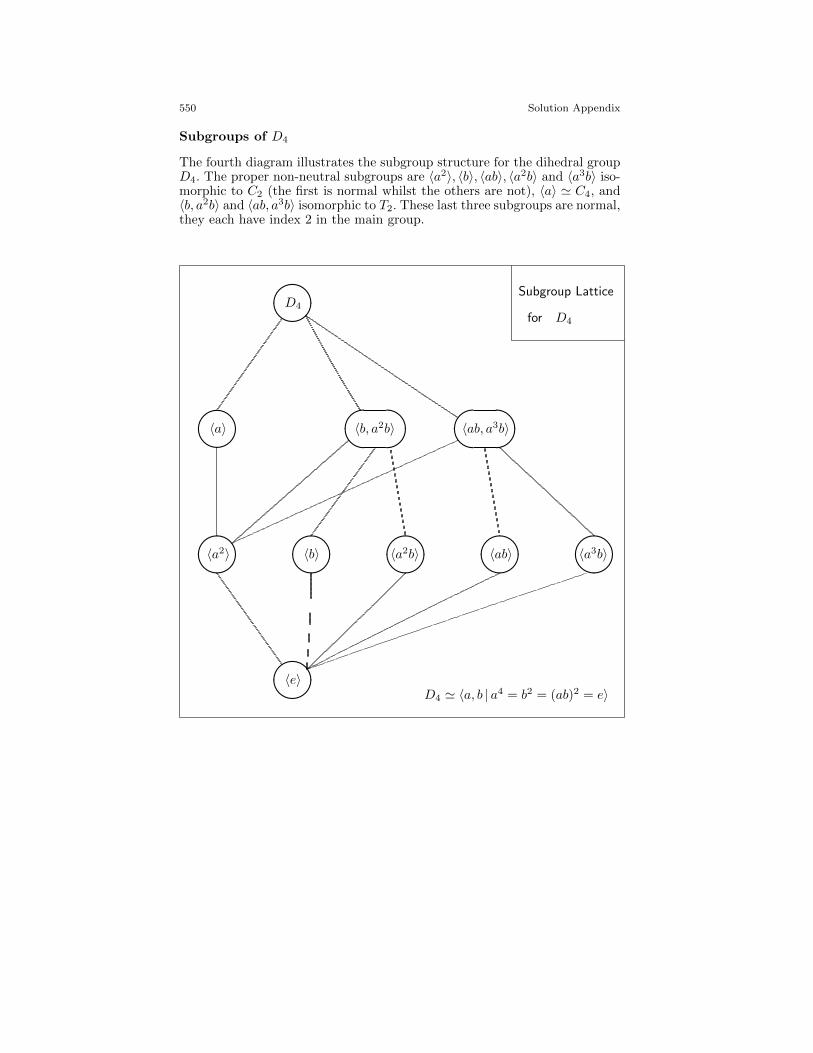
550 Solution Appendix
Subgroups of D4
The fourth diagram illustrates the subgroup structure for the dihedral groupD4. The proper non-neutral subgroups are 〈a2〉, 〈b〉, 〈ab〉, 〈a2b〉 and 〈a3b〉 iso-morphic to C2 (the first is normal whilst the others are not), 〈a〉 ' C4, and〈b, a2b〉 and 〈ab, a3b〉 isomorphic to T2. These last three subgroups are normal,they each have index 2 in the main group.
Subgroup Lattice
for D4
����
����
〈e〉
����
����
D4
����〈a3b〉��
��〈b〉 ����〈a2b〉 ����〈ab〉〈a2〉
〈a〉����
���� 〈ab, a3b〉〈b, a2b〉
D4 ' 〈a, b | a4 = b2 = (ab)2 = e〉
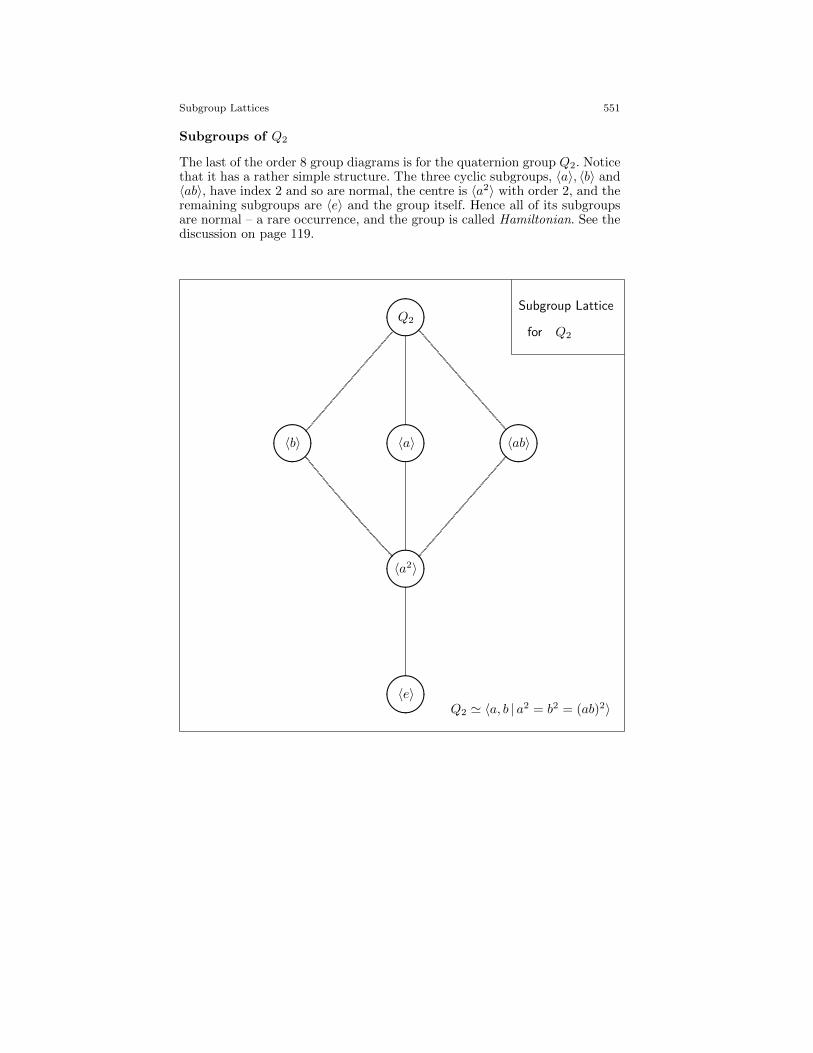
Subgroup Lattices 551
Subgroups of Q2
The last of the order 8 group diagrams is for the quaternion group Q2. Noticethat it has a rather simple structure. The three cyclic subgroups, 〈a〉, 〈b〉 and〈ab〉, have index 2 and so are normal, the centre is 〈a2〉 with order 2, and theremaining subgroups are 〈e〉 and the group itself. Hence all of its subgroupsare normal – a rare occurrence, and the group is called Hamiltonian. See thediscussion on page 119.
Subgroup Lattice
for Q2
����
����
〈e〉
����
����
Q2
〈a2〉
〈a〉����
����
〈b〉 〈ab〉
Q2 ' 〈a, b | a2 = b2 = (ab)2〉
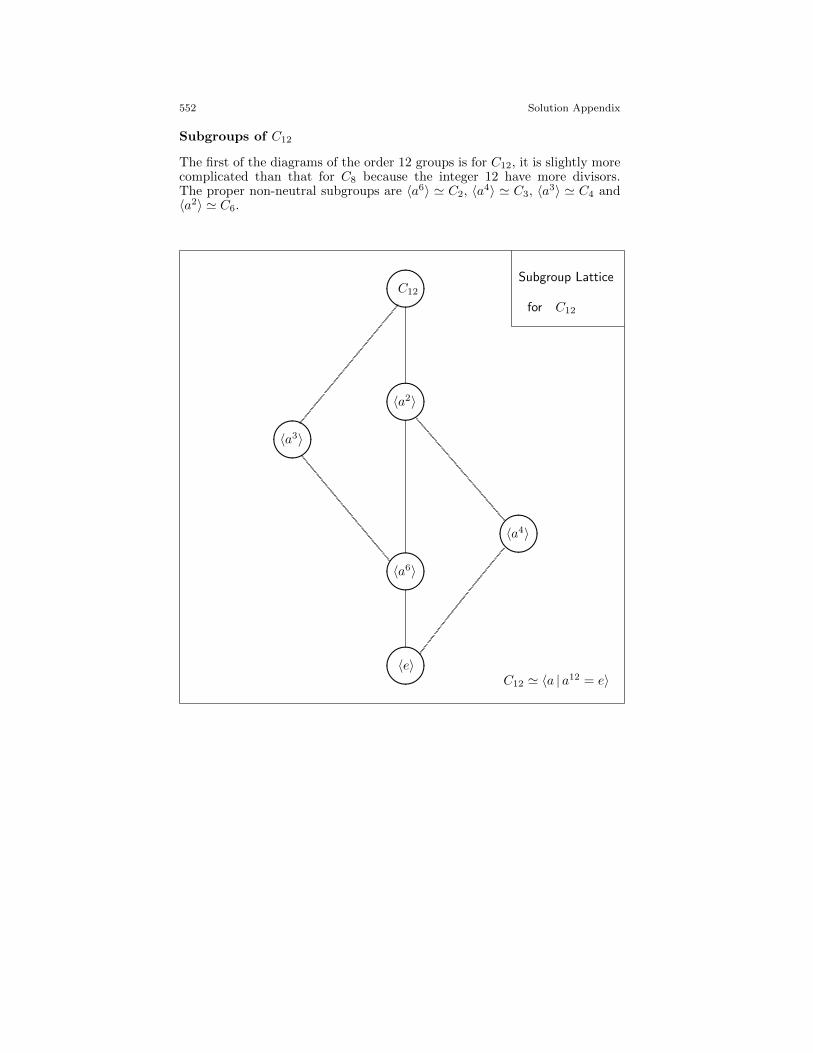
552 Solution Appendix
Subgroups of C12
The first of the diagrams of the order 12 groups is for C12, it is slightly morecomplicated than that for C8 because the integer 12 have more divisors.The proper non-neutral subgroups are 〈a6〉 ' C2, 〈a4〉 ' C3, 〈a3〉 ' C4 and〈a2〉 ' C6.
Subgroup Lattice
for C12
����
����C12
����〈a3〉
����〈a4〉
����〈a2〉
����〈a6〉
〈e〉C12 ' 〈a | a12 = e〉
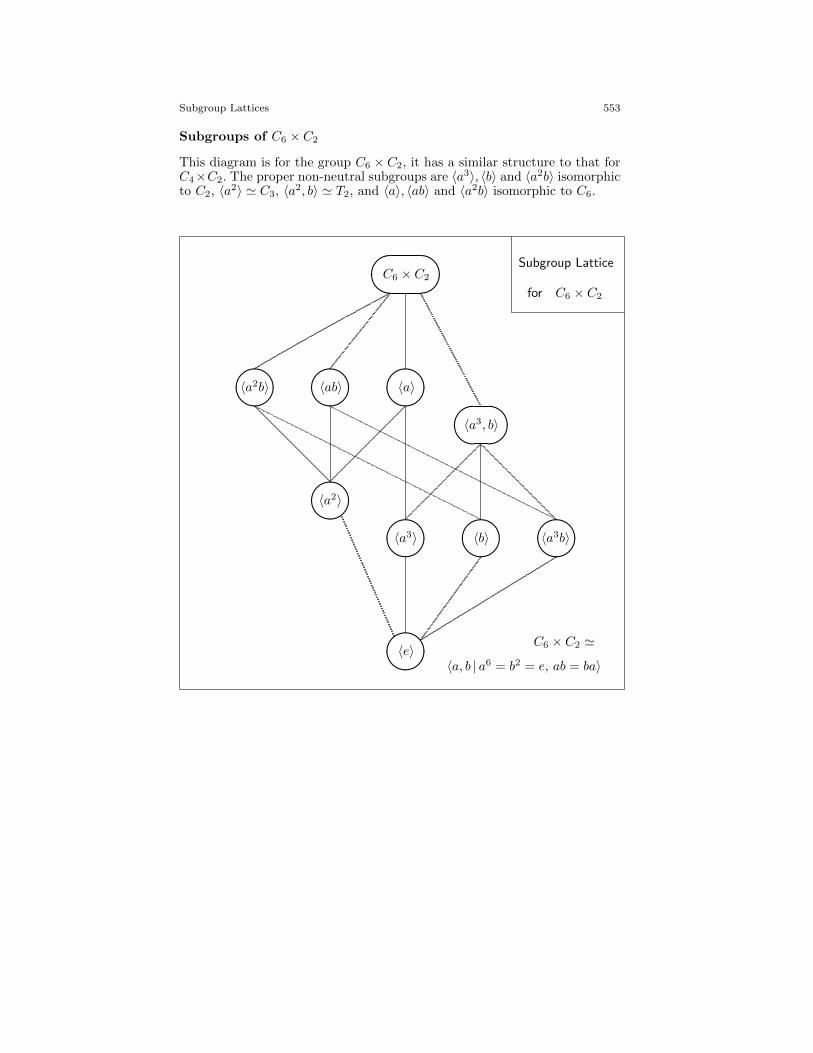
Subgroup Lattices 553
Subgroups of C6 × C2
This diagram is for the group C6 × C2, it has a similar structure to that forC4×C2. The proper non-neutral subgroups are 〈a3〉, 〈b〉 and 〈a2b〉 isomorphicto C2, 〈a2〉 ' C3, 〈a2, b〉 ' T2, and 〈a〉, 〈ab〉 and 〈a2b〉 isomorphic to C6.
Subgroup Lattice
for C6 × C2
����
����C6 × C2
〈e〉
����〈a〉
����〈a3〉 ����〈b〉 ����〈a3b〉
����〈a3, b〉
����〈a2〉
����〈a2b〉 ����〈ab〉
C6 × C2 '
〈a, b | a6 = b2 = e, ab = ba〉
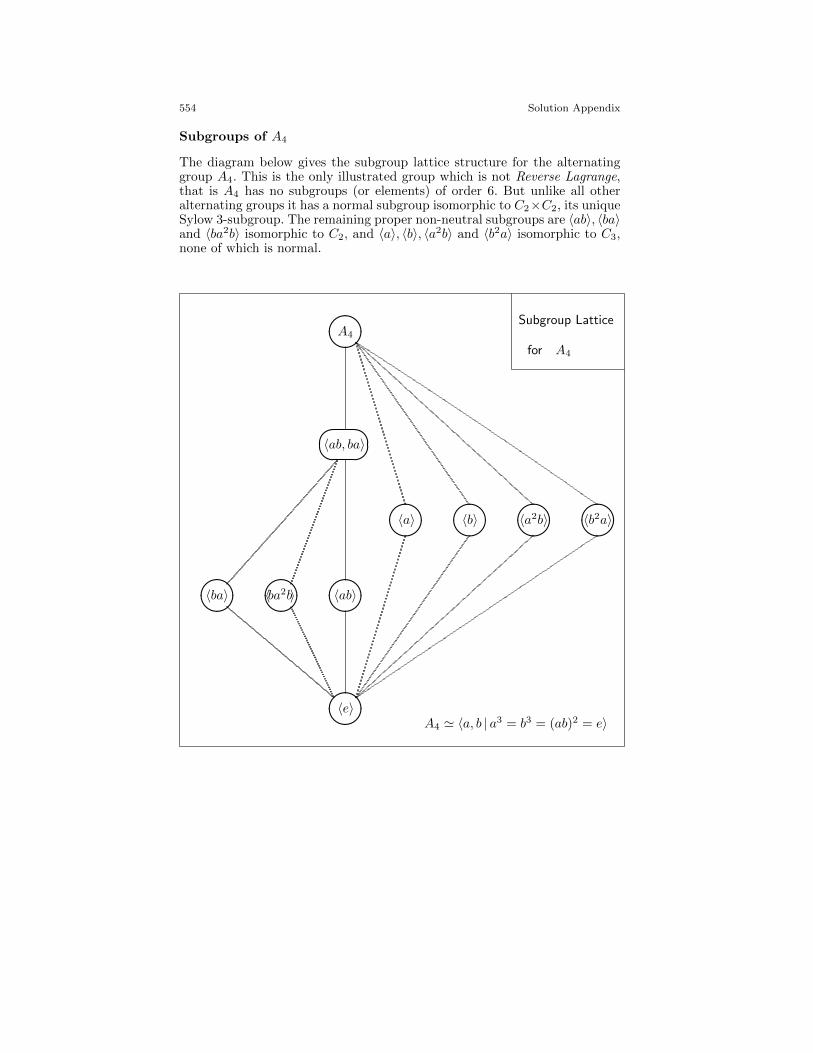
554 Solution Appendix
Subgroups of A4
The diagram below gives the subgroup lattice structure for the alternatinggroup A4. This is the only illustrated group which is not Reverse Lagrange,that is A4 has no subgroups (or elements) of order 6. But unlike all otheralternating groups it has a normal subgroup isomorphic to C2×C2, its uniqueSylow 3-subgroup. The remaining proper non-neutral subgroups are 〈ab〉, 〈ba〉and 〈ba2b〉 isomorphic to C2, and 〈a〉, 〈b〉, 〈a2b〉 and 〈b2a〉 isomorphic to C3,none of which is normal.
Subgroup Lattice
for A4����A4
����〈e〉
����〈ba〉 ����〈ba2b〉 ����〈ab〉
����〈a〉 ����〈b〉 ����〈a2b〉 ����〈b2a〉
����〈ab, ba〉
A4 ' 〈a, b | a3 = b3 = (ab)2 = e〉
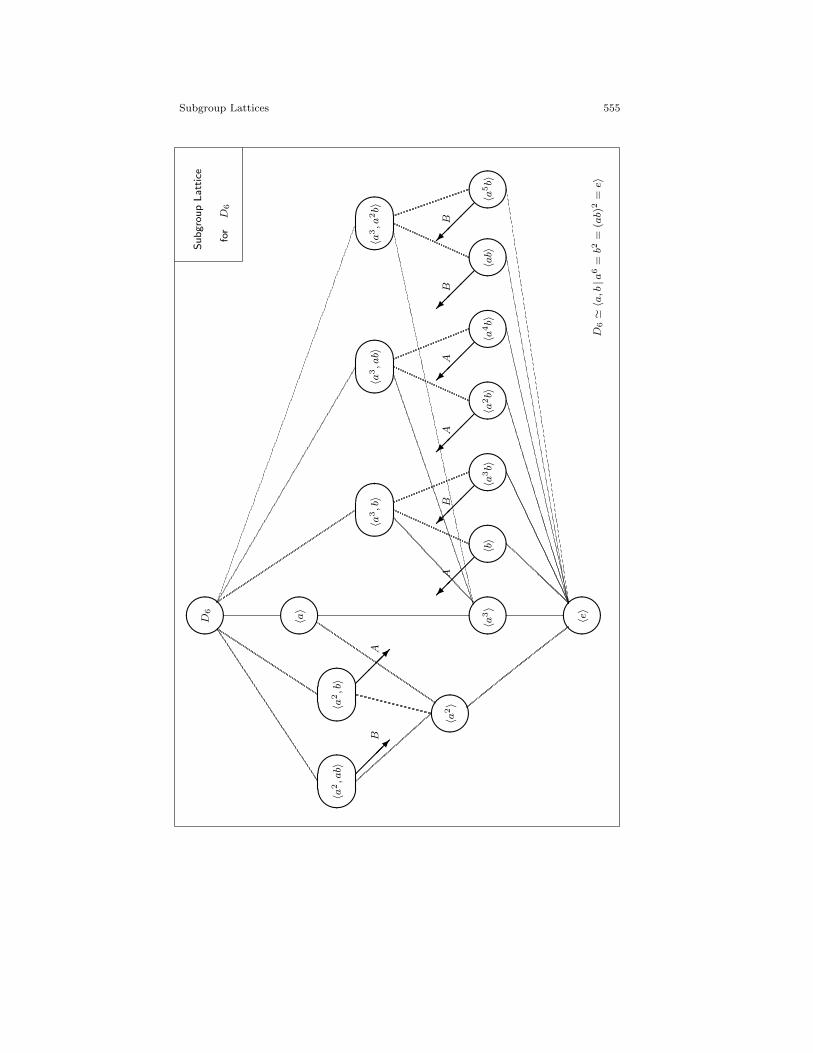
Subgroup Lattices 555
����
����
D6
〈e〉����
〈a3〉����
〈a〉
����
〈a2〉� �� �
@@@RA
〈a2,b〉
� �� �
@@@RB
〈a2,ab〉
����
@@
@IA
〈b〉����
@@
@IB
〈a3b〉����
@@
@IA
〈a2b〉����
@@
@IA
〈a4b〉����
@@
@IB
〈ab〉����
@@
@IB
〈a5b〉
� �� �
〈a3,b〉
� �� �
〈a3,ab〉
� �� �
〈a3,a
2b〉
SubgroupLattice
for
D6
D6'〈a,b|a
6=b2
=(ab)
2=e〉
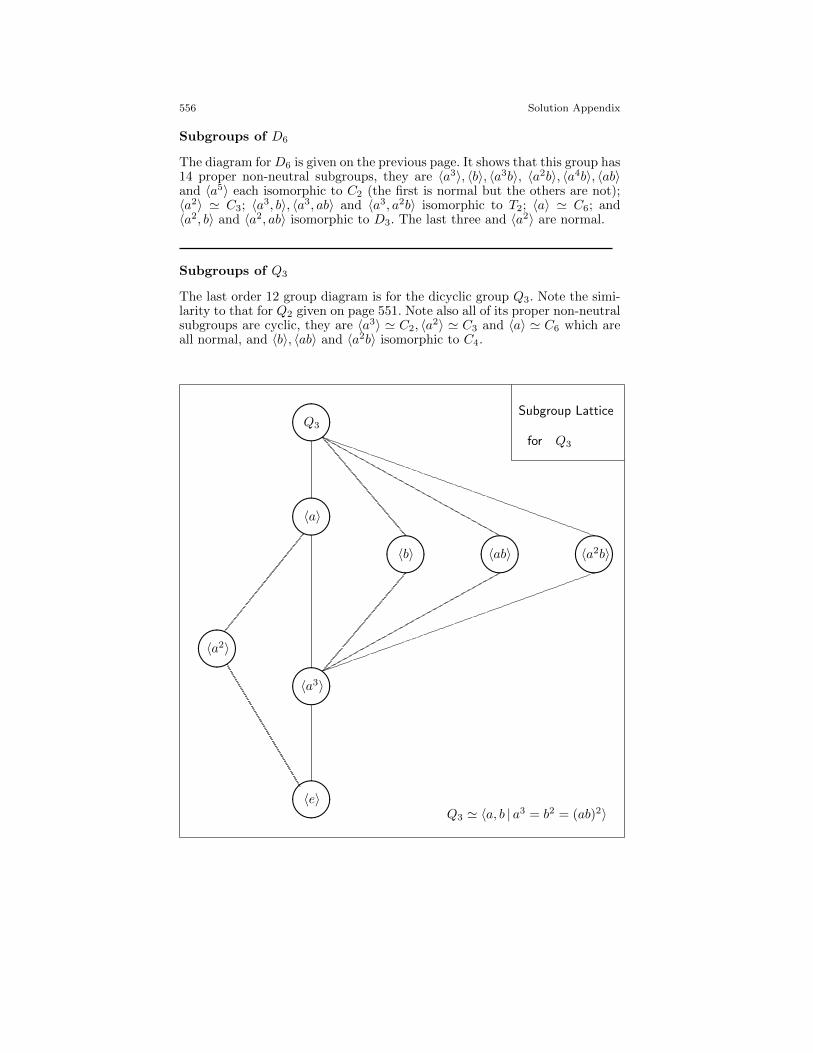
556 Solution Appendix
Subgroups of D6
The diagram for D6 is given on the previous page. It shows that this group has14 proper non-neutral subgroups, they are 〈a3〉, 〈b〉, 〈a3b〉, 〈a2b〉, 〈a4b〉, 〈ab〉and 〈a5〉 each isomorphic to C2 (the first is normal but the others are not);〈a2〉 ' C3; 〈a3, b〉, 〈a3, ab〉 and 〈a3, a2b〉 isomorphic to T2; 〈a〉 ' C6; and〈a2, b〉 and 〈a2, ab〉 isomorphic to D3. The last three and 〈a2〉 are normal.
Subgroups of Q3
The last order 12 group diagram is for the dicyclic group Q3. Note the simi-larity to that for Q2 given on page 551. Note also all of its proper non-neutralsubgroups are cyclic, they are 〈a3〉 ' C2, 〈a2〉 ' C3 and 〈a〉 ' C6 which areall normal, and 〈b〉, 〈ab〉 and 〈a2b〉 isomorphic to C4.
Subgroup Lattice
for Q3
����
����Q3
〈e〉
����〈a2〉
����〈a3〉
����〈a〉
����〈b〉 ����〈ab〉 ����〈a2b〉
Q3 ' 〈a, b | a3 = b2 = (ab)2〉
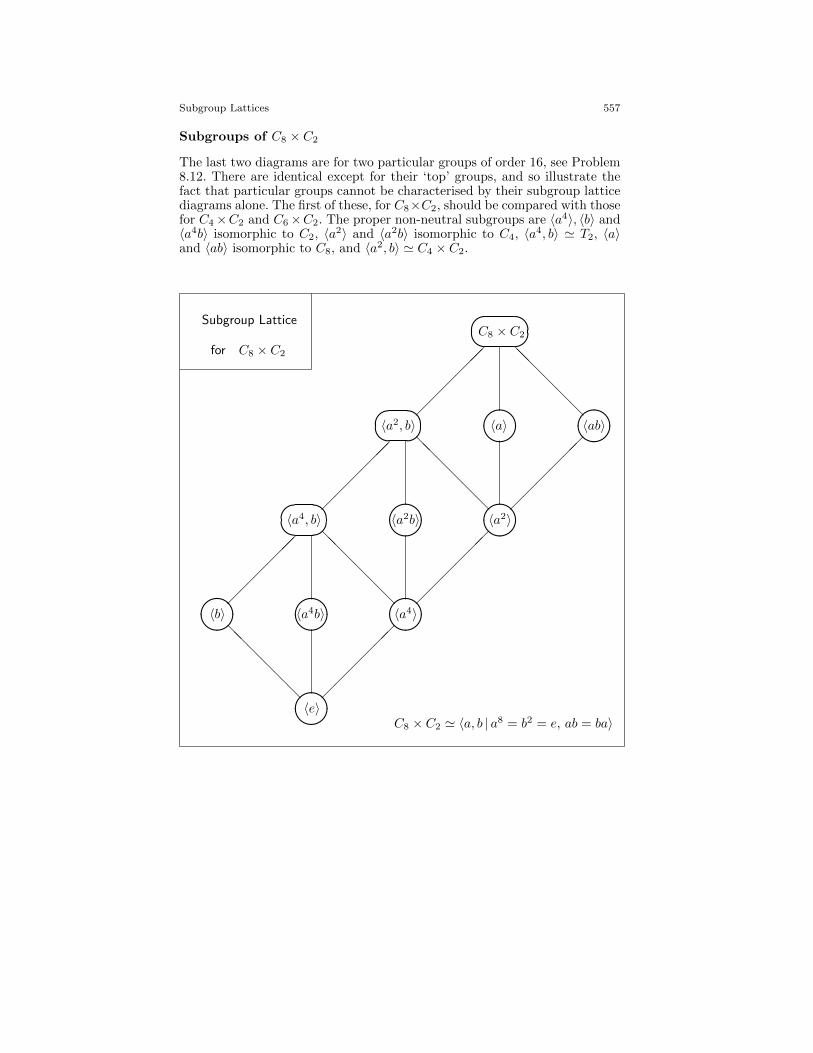
Subgroup Lattices 557
Subgroups of C8 × C2
The last two diagrams are for two particular groups of order 16, see Problem8.12. There are identical except for their ‘top’ groups, and so illustrate thefact that particular groups cannot be characterised by their subgroup latticediagrams alone. The first of these, for C8×C2, should be compared with thosefor C4×C2 and C6×C2. The proper non-neutral subgroups are 〈a4〉, 〈b〉 and〈a4b〉 isomorphic to C2, 〈a2〉 and 〈a2b〉 isomorphic to C4, 〈a4, b〉 ' T2, 〈a〉and 〈ab〉 isomorphic to C8, and 〈a2, b〉 ' C4 × C2.
Subgroup Lattice
for C8 × C2
������
@@@
@@@
������
@@@
@@@
������
������
@@
@@
@@
������
������
@@
@@@@
����〈b〉
��������〈a4b〉
����〈a4, b〉
����〈a4〉
����〈a2b〉 ����〈a2〉
����〈a2, b〉 ����〈a〉
����C8 × C2
����〈ab〉
〈e〉C8 × C2 ' 〈a, b | a8 = b2 = e, ab = ba〉
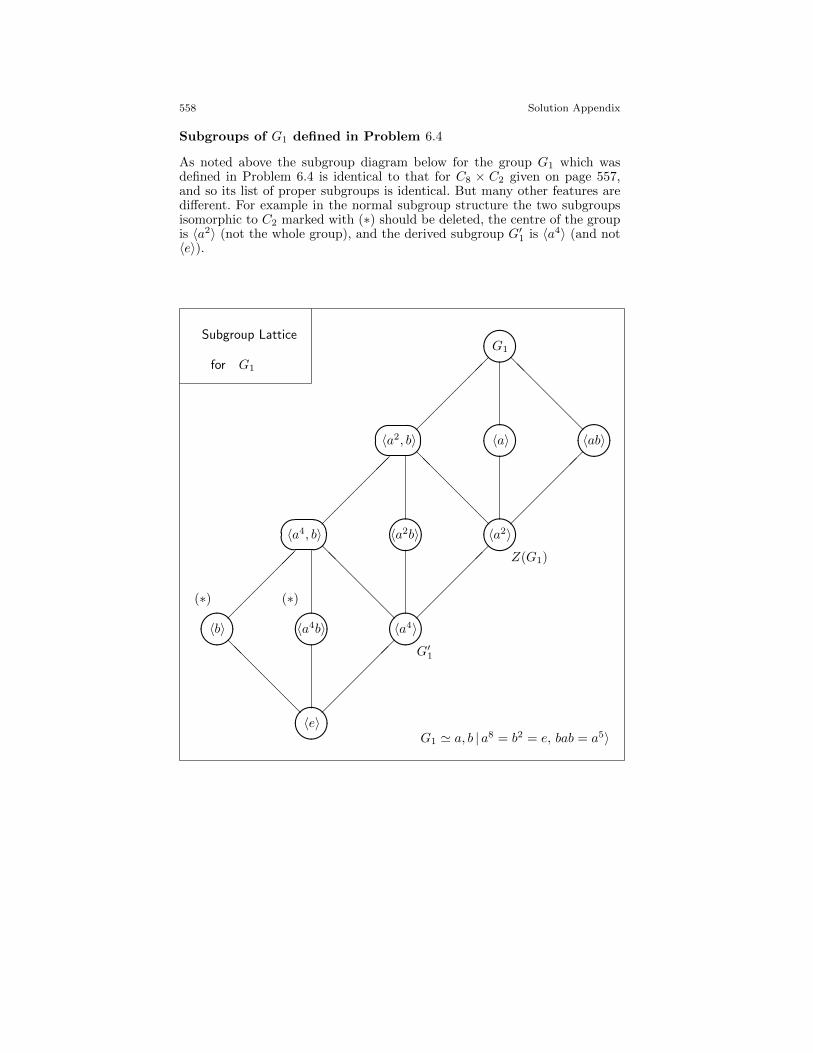
558 Solution Appendix
Subgroups of G1 defined in Problem 6.4
As noted above the subgroup diagram below for the group G1 which wasdefined in Problem 6.4 is identical to that for C8 × C2 given on page 557,and so its list of proper subgroups is identical. But many other features aredifferent. For example in the normal subgroup structure the two subgroupsisomorphic to C2 marked with (∗) should be deleted, the centre of the groupis 〈a2〉 (not the whole group), and the derived subgroup G′1 is 〈a4〉 (and not〈e〉).
Subgroup Lattice
for G1
������
@@@
@@@
������
@@@
@@@
������
������
@@
@@
@@
������
������
@@
@@@@
����〈b〉
(∗)
��������〈a4b〉
(∗)
����〈a4, b〉
����〈a4〉
G′1
����〈a2b〉 ����〈a2〉
Z(G1)
����〈a2, b〉 ����〈a〉
����G1
����〈ab〉
〈e〉G1 ' a, b | a8 = b2 = e, bab = a5〉
http://www.springer.com/978-1-84882-888-9