universidad tecnolÓgica...
TRANSCRIPT

UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
FACULTAD DE CIENCIAS DE LA INGENIERÍA
CARRERA DE INGENIERÍA DE PETRÓLEOS
ESTUDIO DE FACTORES QUE AFECTAN LAS OPERACIONES
DE PRODUCCIÓN Y CAUSAN FALLAS A LOS EQUIPOS ESP
EN UN CAMPO PETROLERO
TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO DE
INGENIERO DE PETRÓLEOS
TLGO. ANDRÉS MAURICIO CASTAÑEDA FUENTES
DIRECTOR: ING. FAUSTO RAMOS AGUIRRE MSC
Quito, Marzo, 2015

© Universidad Tecnológica Equinoccial, 2015
Reservados todos los derechos de reproducción

DECLARACIÓN
Yo, ANDRÉS MAURICIO CASTAÑEDA FUENTES declaro que el trabajo
aquí descrito es de mi autoría; que no ha sido previamente presentado para
ningún grado o calificación profesional; y, que he consultado las referencias
bibliográficas que se incluyen en este documento.
La Universidad Tecnológica Equinoccial puede hacer uso de los derechos
correspondientes a este trabajo, según lo establecido por la Ley de
Propiedad Intelectual, por su Reglamento y por la normativa institucional
vigente.
Andrés Mauricio Castañeda Fuentes
C.I. 1713479564

CERTIFICACIÓN
Certifico que el presente trabajo que lleva por título “ESTUDIO DE
FACTORES QUE AFECTAN LAS OPERACIONES DE PRODUCCIÓN Y
CAUSAN FALLAS A LOS EQUIPOS ESP EN UN CAMPO PETROLERO”,
que para aspirar al título de Ingeniero de Petróleos fue desarrollado por
Andrés Mauricio Castañeda Fuentes, bajo mi dirección y supervisión, en
la Facultad de Ciencias de la Ingeniería; y cumple con las condiciones
requeridas por el Reglamento de Trabajos de Titulación artículos 18 y 25.
Ing. Fausto Ramos Aguirre
Director de Tesis
C.I. 1705134102

DEDICATORIA
A Diosito por regalarme el milagro de la vida y bendecirme con la
culminación de un peldaño más en mi existencia.
A mi esposa Ana Valeria Acosta Sánchez por estar a mi lado, brindarme
todo su apoyo y alentarme cada día a ser mejor.
A la prolongación de mi existencia, mi príncipe Benjamín Andrés Castañeda
Acosta, eres mi vida y todo lo que hago es para ti.
A mis padres Leonidas Rodolfo Castañeda Flores y Yolanda del Rocío
Fuentes Morejón quienes con su infinito amor, paciencia, comprensión y
apoyo incondicional son el ejemplo más grande de superación.
A mis hermanos Fernando y Jimmy y a toda mi familia porque sin importar
las circunstancias han estado conmigo.
Andrés Mauricio Castañeda Fuentes

AGRADECIMIENTO
A la Universidad Tecnológica Equinoccial y su Carrera de Ingeniería en
Petróleos por la formación recibida en ese mundo rodeado de cuatro
paredes llamado salón de clases.
A mis maestros por el conocimiento impartido y de manera especial al Ing.
Fausto Ramos Aguirre, director de tesis, sin su apoyo no habría podido
culminar este trabajo de investigación.
A todos muchas gracias.
Andrés Mauricio Castañeda Fuentes

i
ÍNDICE
PÁGINA
RESUMEN ................................................................................................... xiii
ABSTRACT ................................................................................................... xv
CAPÍTULO I ................................................................................................... 1
1. INTRODUCCIÓN. ............................................................................. 1
1.1. OBJETIVOS DE LA INVESTIGACIÓN. ............................................ 2
1.1.1. OBJETIVO GENERAL. ..................................................................... 2
1.1.2. OBJETIVOS ESPECÍFICOS. ............................................................ 2
1.2. JUSTIFICACIÓN DEL ESTUDIO. ..................................................... 3
1.3. CAUSAS ........................................................................................... 4
1.4. MARCO REFERENCIAL .................................................................. 4
1.4.1. DIFICULTADES MÁS FRECUENTES EN TRABAJOS CON BES ... 5
1.4.1.1. Problemas de producción. .......................................................... 5
1.4.1.2. Problemas eléctricos detectados en el monitoreo. ..................... 6
1.4.1.3. Problemas detectados por el sensor. ......................................... 6
1.4.1.4. Otros problemas. ........................................................................ 6
1.4.2. DETECCIÓN DE PROBLEMAS ....................................................... 6
1.4.2.1. Problemas de producción. .......................................................... 6
1.4.2.2. Problemas eléctricos. ................................................................. 6
1.4.2.3. Problemas detectados por sensor y VSD. .................................. 7
CAPÍTULO II .................................................................................................. 8

ii
2. MARCO TEORICO ........................................................................... 8
2.1. REQUERIMIENTOS DE UN POZO PARA LEVANTAMIENTO
ARTIFICIAL. ............................................................................................... 8
2.2. COMPORTAMIENTO DEL POZO. ................................................. 10
2.3. PRESIÓN ESTÁTICA (Pr). ............................................................. 10
2.4. PUNTO DE BURBUJA. ................................................................... 11
2.5. CURVAS DE AFLUENCIA IPR. ...................................................... 11
2.5.1. ÍNDICE DE PRODUCTIVIDAD (IP). ............................................... 12
2.5.2. RELACIÓN DEL COMPORTAMIENTO DE AFLUENCIA DE
FLUIDOS (CURVA IPR). .......................................................................... 13
2.6. COMPORTAMIENTO DE LAS PRESIONES. ................................. 15
2.7. PRUEBAS DE RESTAURACIÓN DE PRESIÓN (BUILD-UP). ....... 16
2.8. VOLUMEN TOTAL DE FLUIDOS. .................................................. 17
2.9. COMPONENTES DEL SISTEMA ELÉCTRICO SUMERGIBLE (ESP
O BES) Y SUS APLICACIONES. ............................................................. 18
2.9.1. LA BOMBA. .................................................................................... 18
2.9.1.1. Tipos de bombas dependiendo de los impulsores. .................. 20
2.9.1.2. Tipos de bomba según su construcción. .................................. 22
2.9.1.3. Rango de operación de una bomba. ........................................ 24
2.9.1.4. Nomenclatura de una bomba. .................................................. 27
2.9.2. LA SECCIÓN DE ENTRADA O INTAKE. ....................................... 28
2.9.3. SEPARADOR DE GAS / ADMISIÓN. ............................................. 28
2.9.4. EL MOTOR DE LA BES. ................................................................. 30
2.9.5. EL PROTECTOR. ........................................................................... 31
2.9.6. CABLE DE POTENCIA. .................................................................. 33
2.10. ACCESORIOS, CONTROL ELÉCTRICO Y EQUIPO DE
SERVICIO... ............................................................................................. 34

iii
2.10.1. CONTROLADOR DEL MOTOR. ................................................... 34
2.10.2. CONTROLADOR DE VELOCIDAD VARIABLE. ........................... 34
2.10.3. SENSORES DE FONDO. ............................................................. 35
2.10.4. CAJA DE CONEXIONES. ............................................................. 35
2.10.5. TRANSFORMADORES MONOFÁSICOS Y TRIFÁSICOS. ......... 35
2.10.6. CABEZAL DE BOCA DE POZO. .................................................. 36
2.10.7. VÁLVULA DE RETENCIÓN.......................................................... 36
2.10.8. VÁLVULA DE DRENAJE. ............................................................. 36
2.10.9. CENTRALIZADORES. .................................................................. 37
2.10.10. BANDAS PARA SUJETAR EL CABLE (FLEJES). ..................... 37
2.10.11. CABLE PLANO DE EXTENSIÓN AL MOTOR ............................ 37
2.10.12. PROTECTORES DE CABLE PLANO ......................................... 37
2.10.13. RUEDA GUÍA DEL CABLE ......................................................... 38
CAPÍTULO III ............................................................................................... 39
3. METODOLOGÍA ............................................................................. 39
3.1. RECOMENDACIÓN PRÁCTICA API 11 S2 PARA PRUEBAS DE
BOMBAS ESP. ......................................................................................... 39
3.2. JUEGO TERMINAL DEL EJE. ........................................................ 39
3.2.1. EXTENSIÓN DEL EJE AL TOPE. .................................................. 40
3.2.2. EXTENSIÓN DEL EJE AL FONDO. ............................................... 40
3.3. DEFINICIONES. ............................................................................. 41
3.3.1. PUNTO DE PRUEBA ACEPTABLE. .............................................. 41
3.3.2. LEYES DE AFINIDAD. .................................................................... 41
3.3.3. BANDA PERMISIBLE DE DESARROLLO DE LA TASA DE FLUJO
DE CABEZA . ........................................................................................... 42

iv
3.3.4. PUNTO DE MEJOR EFICIENCIA (BEP). ....................................... 42
3.3.5. CABALLOS DE FUERZA DE FRENO (BHP). ................................ 42
3.3.6. EFICIENCIA (EFF).......................................................................... 42
3.3.7. TASA DE FLUJO. ........................................................................... 43
3.3.8. PRUEBA DE FLUJO ABIERTO. ..................................................... 43
3.3.9. PRUEBA DE APAGADO. ............................................................... 43
3.4. DATOS Y CARTAS: CURVAS DE DESEMPEÑO. ......................... 43
3.4.1. LA CURVA DE ALTURA DE LA COLUMNA. .................................. 45
3.4.2. LA CURVA DE POTENCIA AL FRENO (BHP). .............................. 45
3.4.3. RANGO DE OPERACIÓN RECOMENDADO. ................................ 45
3.4.4. COLUMNA DINÁMICA TOTAL (TDH). ........................................... 45
3.4.5. CARTAS AMPERIMÉTRICAS. ....................................................... 45
3.5. PROCEDIMIENTO DE PRUEBAS. ................................................ 56
3.5.1. PUNTOS DE PRUEBAS. ................................................................ 56
3.5.2. EFICIENCIA. ................................................................................... 56
3.5.3. CONSIDERACIONES ESPECIALES DE LAS PRUEBAS. ............. 56
3.5.4. ORIENTACIÓN DE LA PRUEBA. ................................................... 57
3.5.5. FLUIDO DE PRUEBA. .................................................................... 57
3.5.6. TIEMPO DE CORRIDO DE LA PRUEBA. ...................................... 57
3.5.7. VARIACIONES DE VELOCIDAD. ................................................... 57
3.5.8. REQUERIMIENTO DE PRESIÓN DE SUCCIÓN. .......................... 58
3.5.9. PRESIÓN DE INSTRUMENTACIÓN. ............................................. 58
3.6. CERTIFICACIÓN DE PRUEBAS. ................................................... 59
3.6.1. LÍMITES. ......................................................................................... 59
3.6.2. ACEPTACIÓN. ............................................................................... 59
3.7. VIBRACIONES EN SISTEMAS BES. ............................................. 60

v
3.7.1. MEDICIONES DE VIBRACIÓN. ..................................................... 61
3.7.1.1. Pruebas de proximidad. ........................................................... 61
3.7.1.2. Selección de la Localización de la Medición. ........................... 61
3.8. CONSIDERACIONES ELÉCTRICAS. ............................................ 62
3.8.1. SISTEMAS ELÉCTRICOS CON CORTOCIRCUITO. ..................... 62
3.8.2. SISTEMAS ELÉCTRICOS CON EXCESIVO DESBALANCE DE
CORRIENTE. ........................................................................................... 63
3.8.3. SISTEMA ELÉCTRICO OPERANDO CON UNA FASE A TIERRA. 64
3.8.4. EXCESIVO NÚMERO DE ARRANQUES. ...................................... 64
3.8.5. INTERRUPCIONES ELÉCTRICAS. ............................................... 65
3.9. PRUEBAS DE CONTROL. ............................................................. 65
3.9.1. REVISIÓN DE LAS CORRIENTES EN EL MOTOR. ...................... 65
3.9.2. REVISIÓN DE LAS RESISTENCIAS DE AISLAMIENTO DEL
MOTOR. ................................................................................................... 66
CAPÍTULO IV ............................................................................................... 67
4. ANÁLISIS DE RESULTADOS. ....................................................... 67
4.1. RECOMENDACIÓN PRÁCTICA PARA PRUEBAS DE BOMBAS
ELECTRO SUMERGIBLES ...................................................................... 67
4.2. TRANSPORTE, MANEJO Y ALMACENAJE DEL EQUIPO ........... 67
4.2.1. CABLES. ......................................................................................... 69
4.2.2. CABLES TERMINALES DE EXTENSIÓN DEL MOTOR
(PLANOS)…. ............................................................................................ 70
4.3. EQUIPO DE SUPERFICIE Y MISCELANEOS. .............................. 70
4.3.1. TRANSFORMADORES. ................................................................. 70
4.3.2. PANELES DE CONTROL DEL MOTOR. ........................................ 71

vi
4.3.3. EQUIPAMIENTO Y ACCESORIOS. ............................................... 71
4.4. PRUEBAS DE RENDIMIENTO. ...................................................... 71
4.5. ANÁLISIS DE FALLAS DEL EQUIPO BES. ................................... 72
4.5.1. EVALUACIÓN DE LA INFORMACIÓN DE OPERACIÓN DEL
EQUIPO. ................................................................................................... 72
4.5.2. INSPECCIÓN, PRUEBAS Y DESARMADO DEL EQUIPO. ........... 73
4.5.3. INSPECCIÓN EXTERNA DE LOS COMPONENTES..................... 74
4.5.3.1. Presencia de escala. ................................................................ 75
4.5.3.2. Corrosión – erosión . ................................................................ 75
4.5.3.3. Daños mecánicos. .................................................................... 75
4.6. APLICACIÓN. ................................................................................. 76
4.6.1. PROBLEMAS. ................................................................................ 76
4.6.2. REPORTE DE DESARME E INSPECCIÓN. .................................. 76
4.6.2.1. Bombas. ................................................................................... 76
4.6.2.2. Intake – Separador . ................................................................. 78
4.6.2.3. Protector. .................................................................................. 78
4.6.2.4. Motor. ....................................................................................... 79
4.6.3. ANÁLISIS DE FALLAS. .................................................................. 80
4.6.4. DATOS ADICIONALES. ................................................................. 81
4.7. POZO AGUARICO 6....................................................................... 81
4.7.1. PROBLEMAS MECÁNICOS. .......................................................... 81
4.7.2. CAUSAS. ........................................................................................ 82
4.7.3. CAUSAS ELÉCTRICAS. ................................................................. 82
4.8. EQUIPO DE FONDO A TIERRA. ................................................... 82
4.8.1. PROBLEMAS DETECTADOS POR EL SENSOR DE FONDO. ..... 83
4.8.2. VIBRACIÓN ALTA. ......................................................................... 83
vii
4.8.3. TEMPERATURA ALTA DEL MOTOR............................................. 83
4.8.4. AISLAMIENTO BAJO. .................................................................... 84
4.9. ANÁLISIS DE HISTORIALES DE FALLAS DE EQUIPOS ESP . ... 87
4.9.1. ATASCAMIENTO EN BOMBAS POR CARBONATOS DE CALCIO O
SULFATO DE BARIO (ESCALA). ............................................................ 87
4.9.1.1. Shushufindi 106D. .................................................................... 87
4.9.1.2. Limpiezas ácidas y estimulación. ............................................. 88
4.9.1.3. Observaciones al desarme del equipo. .................................... 89
4.9.1.4. Reporte de servicio técnico. ..................................................... 93
4.9.2. ANÁLISIS DE FALLA POZO SSFD 106D. ...................................... 93
4.10. ESTADÍSTICAS DE INTERVENCIÓN DE RIGS DE WORKOVER
PARA EXTRAER EQUIPOS BES ............................................................ 95
CAPÍTULO V.............................................................................................. 101
5. CONCLUSIONES Y RECOMENDACIONES ................................ 101
5.1. CONCLUSIONES ......................................................................... 101
5.2. RECOMENDACIONES ................................................................. 103
BIBLIOGRAFÍA .......................................................................................... 105
NOMENCLATURA ..................................................................................... 106
GLOSARIO ................................................................................................ 108
ANEXOS .................................................................................................... 113
viii
ÍNDICE DE TABLAS
PÁGINA
Tabla 01. Fuerzas que actúan sobre el impulsor 26
Tabla 02. Nomenclatura de las bombas 27
Tabla 03. Tolerancia para los instrumentos utilizados durante la prueba
de una bomba 58
Tabla 04. Límites de pruebas aceptables de la bomba desde las curvas
publicadas 60
Tabla 05. Valores de resistencia de aislamiento medidos entre fase –
tierra 66
Tabla 06. Equipos ESP fuera de servicio 85
Tabla 07. Datos del Pozo Shushufindi 106D 87
Tabla 08. Reporte de servicio técnico 93
Tabla 09. Equipo con falla directa de la bomba 95
Tabla 10. Equipos con falla directa de motor 95
Tabla 11. Equipos con falla directa del cable 97
ix
ÍNDICE DE FIGURAS
PÁGINA
Figura 01. Bomba y sus componentes 19
Figura 02. Etapa o bomba centrífuga 20
Figura 03. Impulsor radial 21
Figura 04. Impulsor de flujo mixto 21
Figura 05. Impulsor de flujo axial 22
Figura 06. Tipos de bomba según su construcción 22
Figura 07. Bomba de construcción flotante 24
Figura 08. Curva de rendimiento de una bomba 25
Figura 09. Fuerzas que actúan sobre el impulsor 25
Figura 10. Separador de gas rotativo 29
Figura 11. Protector de sello positivo o bolsa 32
Figura 12. Controlador de frecuencia variable 34
Figura 13. Juego terminal del eje 40
Figura 14. Curva de una bomba electro sumergible a 60 Hz 44
Figura 15. Carta amperimétrica: normal 47
Figura 16. Carta amperimétrica: fluctuaciones de energía 48
Figura 17. Carta amperimétrica: bloqueo por gas 48
Figura 18. Carta amperimétrica: descarga de fluido de control 49
Figura 19. Carta amperimétrica: bajo nivel de fluido (Caso I) 50
Figura 20. Carta amperimétrica: bajo nivel de fluido (Caso II) 50
Figura 21. Carta amperimétrica: exceso de ciclos de operación 51
Figura 22. Carta amperimétrica: gas libre en la bomba 51
Figura 23. Carta amperimétrica: apagado inmediato por baja carga 52
Figura 24. Carta amperimétrica: falla en apagado por baja carga 53
Figura 25. Carta amperimétrica: sobre carga 53
Figura 26. Carta amperimétrica: manejo de sólidos 54
Figura 27. Carta amperimétrica: excesivos intentos de arranque 55
Figura 28. Carta amperimétrica: emulsiones o cargas en superficie 55
Figura 29. Ubicación de los soportes de caucho dentro de las cajas 67
x
Figura 30. Ubicación del equipo dentro de las cajas 68
Figura 31. Forma correcta de transportar equipos en la plataforma 69
Figura 32. Utilización de la barra de equilibrio al movilizar un carrete con
grúa 69
Figura 33. Movilización del carrete con montacargas 70
Figura 34. Pedazos metálicos del separador 77
Figura 35. Shaft - Tube suelto y consumido. Eje severamente desgastado
78
Figura 36. Curva de rendimiento bomba Reda – Pozo Atacapi 12D 81
Figura 37. Difusor con sólidos que reaccionan con HCl 89
Figura 38. Impulsor con sólidos que reaccionan con HCl 89
Figura 39. Separador de gas con presencia de sólidos en su interior 90
Figura 40. Rotor separador con sólidos adheridos 90
Figura 41. Inductor con sólidos adheridos 90
Figura 42. Bolsa llena con fluido del pozo 91
Figura 43. Zapata con severo desgaste radial 91
Figura 44. Ejes con marcas de desgaste en sector de bujes guías y sello
superior e inferior 92
Figura 45. Sólidos encontrados en cámara intercambiadora 92
Figura 46. Motor: zapatas con marcas de desgaste y calentamiento 92
Figura 47. Base y cabeza de motor con aceite contaminado 93
Figura 48. Fallas en componentes Cía. Schlumberger 99
Figura 49. Fallas en componentes Cía. Centrilift 100

xi
ÍNDICE DE ECUACIONES
PÁGINA
Ecuación 1. Índice de Productividad (IP) 13
Ecuación 2. Ecuación de caudal, IP constante 13
Ecuación 3. Ecuación de Vogel – IPR 14
Ecuación 4. IP cuando Pwf < Pb 15
Ecuación 5. Ecuación de caudal cuando Pwf < Pb 15
Ecuación 6. Leyes de afinidad 41
Ecuación 7. Eficiencia de la bomba 43
Ecuación 8. Columna Dinámica Total 46

xii
ÍNDICE DE ANEXOS
PÁGINA
ANEXO 01. 114
Reporte de análisis de falla
ANEXO 02. 115
Reporte de análisis de falla
ANEXO 03. 116
Reporte de análisis de falla
ANEXO 04. 117
Reporte de análisis de falla

xiii
RESUMEN
Son cientos los pozos en el Distrito Amazónico que son manejados por la
Empresa Pública de Exploración y Explotación de Hidrocarburos
“Petroamazonas EP” y otras extranjeras que utilizan Bombeo Electro
Sumergible (BES) como medio de producción de petróleo. Baker-Centrilift,
Schlumberger-Reda y General Electric, son las encargadas de suministrar
los equipos requeridos y son las responsables de la operación y
mantenimiento de cada uno de los componentes del sistema en un
determinado pozo.
En el Bombeo Electro Sumergible, cada operación, desde el escogimiento
de los componentes, manufactura, funcionamiento, mantenimiento y fallas
tienen un proceso, un procedimiento recomendado a seguir con el fin de
lograr una mayor eficiencia del sistema en cada aspecto, y, de haber
problemas, tratar de solucionarlos y prevenirlos.
Es necesario aplicar de manera correcta cada procedimiento, de este modo
obtendremos un beneficio, tanto en el aspecto operativo como en el
económico.
El presente trabajo recopila todas las recomendaciones a tomarse en cuenta
en una prueba de Bomba Electro Sumergible, que se encuentran en
vigencia, una vez publicadas por el American Petroleum Institute (API).
Estas recomendaciones prácticas son aquellas consideradas generalmente
necesarias para el éxito en la operación del BES.
Este trabajo abarca un amplio campo de análisis técnico con respecto a las
fallas de los equipos y accesorios, que con frecuencia se presentan en el
equipo de Bombeo Electro Sumergible, daños o fallas tales como:
mecánicas, eléctricas, externas, como también fallas del material, y es así
que se tiene problemas como: pérdida de aislamiento, ruptura del eje de los
xiv
equipos de fondo, sobrecalentamiento del motor, formación de escala y
adherencia de la misma al housing, contaminación del motor con el fluido del
pozo, incremento o baja de voltaje, taponamiento de los agujeros de succión,
desgaste o erosión del material del equipo, desgaste de las etapas de la
bomba, atascamiento del equipo, problema en los empalmes, bajo
aislamiento, temperatura altas del motor, entre otros.
También se ofrece una descripción resumida de cada uno de los
componentes y su importancia dentro del sistema de Bombeo Electro
Sumergible, tanto en superficie como en subsuelo.
Se realiza una descripción de la recomendación práctica dada por el
American Petroleum Institute (API) para Pruebas de Bombas Electro
Sumergibles y se mencionan explicaciones del procedimiento a seguir en
una prueba de bomba.
En lo concerniente a los análisis de fallas, se puntualiza con amplitud los
problemas y se sugiere soluciones viables para extender la vida operativa de
los equipos BES.
En el capítulo final se presentan las conclusiones y las recomendaciones
generales de acuerdo al análisis y evaluación de las fallas sin descuidar los
correctivos que son necesarios implementar para minimizar las fallas en los
equipos BES.

xv
ABSTRACT
There are hundreds of wells in the Amazonian district, which are handled by
the Empresa Pública de Exploración y Explotación de Hidrocarburos
“Petroamazonas EP” and other foreign companies who use Electro
Submersible Pump (ESP) as a means of oil production. Baker-Centrilift,
Schlumberger-Reda and General Electric, are responsible for providing the
required equipment and are responsible for the operation and maintenance
of each system component in a particular well.
At Electro Submersible Pump, in every operation, from the selection of the
components, manufacture, operation, maintenance and failures have a
process and recommended procedure to follow in order to achieve greater
efficiency of the system in every aspect, and, having problems, try to solve
and prevent them.
In ESP operations it is necessary to apply every procedure correctly; this
mode will obtain an operating and economic benefit.
This work collects all the recommendations to be taken into account in a test
of an Electro Submersible Pump, which are in force, once published by the
American Petroleum Institute (API). These practical recommendations are
those considered generally necessary for success in the operation of the
ESP.
This work covers a wide range of technical analysis with respect to
deficiencies in the equipment and accessories, which often occur in the
Electro Submersible Pump (ESP), damage or faults such as: mechanical,
electrical, external, and also fail the material, and so has problems as: loss of
isolation, rupture of the teams bottom axis overheating of the engine, scale
formation and adhesion to the housing, pollution of the motor with the fluid
from the well, increase or low voltage, tamponed of suction holes, wear or
xvi
erosion of material from the equipment, wear and tear on the stages of the
bomb, binding equipment, problem in the joints under isolation, high
temperature of the engine among others.
Also this provides a summary description of each of the components and
their importance within the Electric Submersible Pumping system, both
surface and subsurface.
It provides a description of the practical recommendation given by the
American Petroleum Institute (API) for evidence of Electro Submersible
Pumps and mentioned explanations of the procedure to follow in a pump
proof.
As regards the analysis of failures, says broadly the problems and suggests
feasible solutions pair extend the operational life of the ESP teams.
The final chapter presents conclusions and general recommendations
according to the analysis and evaluation of failures without neglecting the
corrections that are needed then to minimize failures in the ESP.
CAPÍTULO I
1
CAPÍTULO I
1. INTRODUCCIÓN
Las bombas multietapas conocidas como ESP por sus siglas en inglés
(Electrical Submersible Pump), se han constituido en el levantamiento
artificial más usado en los campos de compañías operadoras privadas, al
igual que en los campos de la empresa estatal Petroamazonas EP.
La preferencia frente a otros sistemas de levantamiento artificial, es la
adaptabilidad a casi todas las condiciones de producción de un yacimiento,
debido a que pueden producir desde 200 hasta 30.000 barriles de fluido por
día, a profundidades de hasta 15000 pies de profundidad, con presiones de
fondo mayores y menores al punto de burbuja.
Hoy en día contamos con programas de diferentes empresas que nos
facilitan el dimensionamiento con mayor precisión de los equipos ESP.
La tecnología de los VSD (Variable Speed Controller) ha mejorado mucho en
los últimos años, permitiendo adaptarse a los cambios de producción de un
pozo, ya sea controlando la presión de fondo o el caudal productivo de éste,
controlando la frecuencia de operación o encontrando la frecuencia óptima,
permitiendo manejar los equipos automáticos con mucha facilidad, incluso se
puede llevar la información a un computador central. El controlador de
velocidad o frecuencia variable actualmente nos permite operar la bomba
electro sumergible sobre un amplio rango de frecuencias, en vez de estar
limitado a la frecuencia de línea. Podemos sacar provecho de esto para
seleccionar un tamaño de bomba y de motor capaz de manejar un amplio
rango de condiciones de la aplicación.

2
Lo que se hace con los controladores de velocidad variable es diseñar una
bomba basándonos en ciertas condiciones de flujo, las cuales determinarán
dentro de que rango de frecuencia se debe de operar, seleccionando un
motor que sea lo suficientemente grande para proveer la potencia (HP)
requerida a la frecuencia teórica máxima para la aplicación.
1.1. OBJETIVOS DE LA INVESTIGACIÓN
1.1.1. OBJETIVO GENERAL
Detectar y analizar los daños más frecuentes en las operaciones de
producción de pozos de petróleo por BES (Bombeo Electro
Sumergible).
1.1.2. OBJETIVOS ESPECÍFICOS
Describir los componentes del BHA electro sumergible.
Escoger y tabular la información de los pozos que fueron intervenidos
por fallas a los equipos BES.
Analizar otras posibles causas de fallas del equipo BES durante la
operación.
Describir la Norma 11 S2 de las recomendaciones prácticas
consideradas para las operaciones con bombeo electro sumergible de
acuerdo a lo dispuesto por el API.
Elaborar un procedimiento de inspección y reparación del equipo
electro sumergible.
Realizar un análisis de fallas.
Ofrecer recomendaciones para optimizar el período de vida de los
equipos.

3
1.2. JUSTIFICACIÓN DEL ESTUDIO
El presente documento pretende visualizar los daños que con frecuencia se
presentan en los equipos BES analizando las causas directas e indirectas
que lo originaron y definir un procedimiento de operación de estos equipos
que redunden en un mayor tiempo de operación en el pozo y
consecuentemente, reducir los costos de operación.
Este trabajo se orienta a establecer elementos de juicio para que las
empresas productoras mantengan un riguroso manejo en las completaciones
e instalaciones de equipos BES dentro de un pozo, con el objetivo de alargar
la vida útil del mismo y elevar la rata de producción.
El análisis de los daños más comunes que afectan a equipos BES se enfoca
en conocer el por qué de estas fallas y ofrecer recomendaciones que ayuden
a solucionar desde la fabricación y la seleccion de cada componente de
acuerdo al tipo de fluido a manejarse y capacitar al personal técnico para el
seguimiento adecuado durante la operacion en el pozo.
Las bombas centrífugas multietapas, de flujo radial o de flujo mixto, están
diseñadas para levantar volúmenes de petróleo y/o agua, con un mínimo de
reparaciones y tiempos de parada. El número de etapas en la bomba está
determinado por la presión requerida en la cabeza del pozo, la profundidad
de levantamiento y el volumen de fluido a ser producido. Adicionalmente,
determinar si se cumple la recomendación práctica determinada por las
Normas API concerniente al levantamiento artificial para los procesos
relacionados a pruebas de bombas BES.
Todo el proceso, desde la instalación, el tiempo de funcionamiento de los
equipos (Runlife) y la reparación de los equipos electro sumergibles,
evidencian regulares rendimientos y altos costos de operación. Esta es la
razón por la que se requiere investigar si estos bajos rendimientos se deben

4
a que no se está implementando los correctivos necesarios que conlleven a
optimizar el funcionamiento y el tiempo de vida de los mismos.
1.3. CAUSAS
Los problemas en el equipo de Bombeo Electro Sumergible (BES) son
producidos por varias causas y se dan desde la fabricación del equipo, fallas
relacionadas al diseño, al ensamblaje, manipulación, transporte,
almacenamiento del equipo, entre otras; y es debido a: la gran longitud del
equipo, mala manipulación del equipo en el momento del izaje hacia la mesa
de ensamblaje, mal ensamblaje del equipo en superficie, sobrecalentamiento
del motor, presencia de sólidos en el yacimiento, desgaste de las etapas,
hueco en la tuberia de producción debido a la presencia de elementos
corrosivos, efectos contaminantes del yacimiento (efectos abrasivos y
corrosivos), errores humanos (entrenamiento deficiente del personal
técnico), inapropiada transportación y manipulación del equipo, inapropiado
almacenamiento, falta de supervisión durante la bajada del equipo, fluidos
del reservorio, factores climáticos, etc.
1.4. MARCO REFERENCIAL
Para poner un pozo a producir se baja una herramienta para cañonear y se
perfora la tubería de revestimiento a la altura de las formaciones donde se
encuentra el yacimiento. El petróleo fluye por esos orificios hacia el pozo y
se extrae direccionando el fluido del pozo mediante una tubería de menor
diámetro conocida como tubing o tubería de producción.
Si el yacimiento tiene energía suficiente (presión), este fluirá por sí solo; en
este caso, se instala en la cabeza del pozo un conjunto de válvulas para
regular el paso del petróleo. Si no existe esa presión, se emplean métodos

5
de levantamiento artificial, entre estos está el método eléctrico llamado
también BES o ESP.
Este sistema BES, está formado por el equipo de fondo y equipo de
superficie. El equipo de superficie está constituido por: transformador,
tablero de control o variador de frecuencia, arrancadores automáticos, caja
de venteo; mientras que el equipo de fondo está constituido por: sensor,
motor, separador de gas, sección sellante o protector, bombas y cable de
potencia. Cada componente, ya sea del equipo de fondo o del equipo de
superficie cumplen un papel muy importante. El equipo de fondo cumple con
la función de levantar el fluido a superficie, y el equipo de superficie es el
encargado de proveer la energía eléctrica al motor para su funcionamiento.
Durante el monitoreo de los equipos y con ayuda de algunos instrumentos
electrónicos, pantalla del variador de frecuencia, pantalla del sensor de
fondo, cartas amperimétricas, se logra detectar y evaluar los problemas que
están sucediendo en el fondo del pozo. Muchas veces estos problemas
implican la remoción del equipo de fondo del pozo (Pulling).
Los problemas más frecuentes con las BES o ESP y que ocurren durante el
tiempo de operación, son problemas que pueden ser resueltos de manera
inmediata, o problemas que duran algunos días, suspendiendo la producción
del pozo para poder cambiar el equipo BES de fondo.
1.4.1. DIFICULTADES MÁS FRECUENTES EN TRABAJOS CON BES
1.4.1.1. Problemas de producción
Pozo con baja producción.
Pozo sin producción.
6
1.4.1.2. Problemas eléctricos detectados en el monitoreo
Incremento del amperaje de consumo del equipo de fondo.
Excesivo amperaje de consumo o el equipo no arranca.
Caída brusca del amperaje del equipo de fondo.
Equipo con fases desbalanceadas.
Equipo de fondo a tierra, etc.
1.4.1.3. Problemas detectados por el sensor
Alta vibración.
Alta o baja presión de intake.
Alta temperatura del motor.
Bajo aislamiento, etc.
1.4.1.4. Otros problemas
Problemas de reservorio.
Problemas de pozos, etc.
1.4.2. DETECCIÓN DE PROBLEMAS
1.4.2.1. Problemas de producción
Son detectados durante la prueba y monitoreo de los pozos.
1.4.2.2. Problemas eléctricos
Podemos detectarlos con ayuda de dispositivos electrónicos de superficie,
con la ayuda de instrumentos con los cuales se realizan medidas para
comprobar el estado de los circuitos eléctricos.

7
1.4.2.3. Problemas detectados por sensor y VSD
Se detectan por el monitoreo de la información de los paneles de superficie
de los sensores. Así:
Alta vibración: el sensor nos da lecturas de la vibración expresadas
en unidades (g), cuando el equipo alcanza valores sobre los 3g,
debemos de tomar medidas correctivas para evitar problemas
mayores con el equipo de fondo, de igual manera cuando estos
valores son muy variables también es un indicativo de que el equipo
está operando inapropiadamente respecto a la vibración.
Alta temperatura del motor: uno de los factores más importantes a
controlar es la temperatura de operación del motor, el sensor nos
permite visualizar estas temperaturas las cuales deberán estar debajo
de la temperatura máxima permisible de operación del motor.
Bajo aislamiento: el sensor de fondo también nos da valores de la
corriente de fuga, con la cual podemos evaluar el estado de
aislamiento de todos los componentes del circuito eléctrico (cable,
motor, cable de extensión, empalmes, etc.).
CAPÍTULO II
8
CAPÍTULO II
2. MARCO TEÓRICO
2.1. REQUERIMIENTOS DE UN POZO PARA
LEVANTAMIENTO ARTIFICIAL
La producción es la actividad de la industria petrolera que se ocupa de
realizar todos los procesos para llevar el petróleo desde el yacimiento hasta
el pozo, y desde éste a la superficie, tratando de extraer la mayor cantidad
de fluido al menor costo posible.
Un pozo productor de petróleo es una facilidad conformada por la tubería de
producción, el revestimiento, el cabezal del pozo, el reductor, la línea de flujo
y algunos accesorios a instalar en la tubería de producción.
Durante la producción primaria, el flujo de fluidos dentro del yacimiento
ocurre por energía propia de éste. Usualmente, las presiones de fondo de
los pozos no son suficientes para llevar los fluidos hasta la superficie, por lo
que es necesario diseñar e instalar un sistema artificial de producción que
permita recuperar estos hidrocarburos, antes de considerar cualquier
proceso de mayor costo y de tecnología más sofisticada.
Durante la vida productiva de los yacimientos, la presión tiende a disminuir
debido a la explotación del campo, a tal grado que los pozos productores
dejan de fluir de forma natural. En variadas ocasiones estas disminuciones
de presión pueden ser originadas por daños en los pozos, ocasionados
principalmente por la misma operación, generalmente este daño es removido
mediante limpieza y estimulaciones.

9
Cuando no se tiene daño en la formación y el flujo de fluidos no es capaz de
llegar a las instalaciones de superficie, es necesario implementar un sistema
artificial de producción, acorde a las características del campo. Se debe
efectuar un estudio en el que se involucre los diferentes sistemas artificiales,
como son: Bombeo Mecánico Convencional (BMC), Bombeo Electro
Sumergible (BES), Bombeo de Cavidad Progresiva (BCP), Bombeo
Hidráulico (BH) y Levantamiento Artificial por Gas (LAG), los que ayudan a
vencer las caídas de presión y mantener el pozo fluyendo.
Incluso sí, con un sistema de producción implementado, existe una baja
aportación de hidrocarburos del yacimiento al pozo, debe analizarse la
posibilidad de aplicar un proceso de mantenimiento de presión, o bien, de
desplazamiento.
Existen varios parámetros a considerar para la selección del sistema de
levantamiento artificial más adecuado, pero en este trabajo sólo se tomarán
en cuenta aquellos pozos que utilizarán el sistema de Bombeo Electro
Sumergible.
El Bombeo Electro Sumergible ha probado ser un sistema artificial de
producción eficiente y económico. En la industria petrolera,
comparativamente con otros sistemas artificiales de producción tiene
ventajas y desventajas, sin embargo, por diversas razones no siempre
puede resultar ser el mejor método de levantamiento artificial
Una instalación de este tipo puede operar dentro de una amplia gama de
condiciones y manejar cualquier fluido o crudo, con los accesorios
adecuados para cada caso.
Un pozo candidato a producir artificialmente con Bombeo Electro Sumergible
debe reunir características que no afecten su funcionamiento como las altas
relaciones gas – aceite, las altas temperaturas, la presencia de arena en los

10
fluidos producidos y medio ambiente de operación agresivo, que son
factores indeseables.
El Bombeo Electro Sumergible trabaja sobre un amplio rango de
profundidades y bajo una amplia variedad de condiciones del pozo. Su
aplicación es particularmente exitosa cuando las condiciones son propicias
para producir altos volúmenes de líquidos con bajas relaciones gas – aceite;
se distingue porque su unidad de impulso o motor está directamente
acoplada con la bomba en el fondo del pozo. El sistema opera sin
empacador, sumergido en el fluido del pozo y suspendido en el extremo
inferior de la tubería de producción, generalmente por arriba de la zona de
disparos.
En consecuencia, es posible la aplicación de Bombeo Electro Sumergible en
pozos que se encuentren bajo las siguientes condiciones: altas tasas de
producción, alto índice de productividad, baja presión de fondo, alta relación
agua – petróleo, y baja relación gas – líquido (RGL). En caso de alta RGL,
se puede emplear este método utilizando un separador de gas.
2.2. COMPORTAMIENTO DEL POZO
Los yacimientos de crudo son formaciones de rocas, en donde los espacios
vacíos son llenados con petróleo bajo una cierta cantidad de presión. Los
yacimientos están clasificados como de: presión natural, alta presión y baja
presión. Se han visto casos donde un pozo recién perforado comienza a fluir
naturalmente (alta presión). La idea es entender que el yacimiento está
presurizado.
2.3. PRESIÓN ESTÁTICA (Pr)
11
Es la presión promedio del yacimiento o la presión máxima en la roca. Es
una medida de la energía total disponible en el yacimiento. Mientras mayor
es la Pr, habrá más disponibilidad de energía para producir los fluidos. La
presión estática es el valor inicial de energía. Si perforamos en el yacimiento
y comienza la migración de fluidos, la presión declinará a la salida del
yacimiento. Si no existe una presión menor en las perforaciones, no habría
flujo ya que debe haber un diferencial de presión para que se produzca el
movimiento de fluidos.
2.4. PUNTO DE BURBUJA
El petróleo es una mezcla compleja de hidrocarburos que varía de moléculas
pequeñas a grandes. Las pequeñas como el metano y etano son gas en
condiciones de superficie, pero se pueden disolver en fluido de fondo. Si
tomamos el fluido del yacimiento, que inicialmente es todo líquido y bajamos
la presión, los componentes pequeños como el metano pueden migrar y
formar gas. La presión a la cual las burbujas de gas comienzan a aparecer
se llama “Presión de burbuja” (Pb).
Dentro del diseño de cualquier tipo de levantamiento artificial, uno de los
primeros pasos y más importante es determinar o estimar la productividad
del pozo a la profundidad deseada de operación, esta tasa de producción no
debe crear condiciones de agotamiento de nivel o un excesivo nivel de
fluido.
2.5. CURVAS DE AFLUENCIA IPR
Estas curvas permiten conocer el potencial de la formación, este es un factor
muy importante en la evaluación del pozo. En cualquier diseño de los
diferentes sistemas de levantamiento artificial es de vital importancia estimar

12
la productividad del pozo a la profundidad deseada de operación.
Esta tasa de producción no debe exceder ni tener agotamiento del nivel del
fluido. El régimen de producción se puede determinar por varios métodos:
Índice de Productividad (IP o J): considera el flujo similar al de una
sola fase en yacimientos donde Pwf ≥ Pb (todo el gas se encuentra en
solución), el comportamiento está determinado por la IP constante.
IPR: donde Pwf < Pb, condiciones en las cuales se genera un flujo
bifásico por lo cual no se puede usar correctamente la relación lineal
IP. Se determina la relación del comportamiento de afluencia IPR.
Otros métodos han sido desarrollados para calcular el IPR de un
pozo, entre ellos el método de Standing para pozos con daño “skin”.
2.5.1. INDICE DE PRODUCTIVIDAD (IP)
El Índice de Productividad IP se define como el caudal de producción en
barriles por día que puede lograrse por cada psi de reducción en la presión
de fondo del pozo.
El índice de productividad ha sido utilizado para estimar la capacidad de los
pozos. Por tanto el IP es una medida del potencial del pozo o de su
capacidad de producir.
El caudal de producción no siempre cambia según la presión de fondo con
producción en forma lineal como parecería suceder en la ecuación del IP.
En resumen el IP puede utilizarse cuando:
El pozo produce sólo petróleo o sólo agua.
13
Las presiones de fondo con producción están por encima del punto de
burbuja.
No se dispone de mejores datos.
Se lo representa con la siguiente fórmula:
𝐼𝑃 = 𝑞𝑜
Pr − 𝑃𝑤𝑓 𝑐𝑢𝑎𝑛𝑑𝑜 𝑃𝑤𝑓 ≥ 𝑃𝑏
[Ec. 1]
Donde:
qo = Tasa de flujo, bls
Pr = Presión promedio del yacimiento, psi
Pwf = Presión de fondo (al caudal de prueba), psi
Pr – Pwf = Diferencia de presión de fondo (drawdown) (∆P), psi
Valores de IP
IP < 0,5 Bajo
0,5 ≤ IP ≤1,5 Intermedio
IP > 1,5 Alto o bueno
Asumiendo un IP constante, podemos transformar la ecuación anterior para
resolver nuevas tasas de producción (qo) en base a nuevas presiones de
flujo (Pwf):
𝑞𝑜 = 𝐼𝑃 (Pr − 𝑃𝑤𝑓) [Ec. 2]
2.5.2. RELACIÓN DEL COMPORTAMIENTO DE AFLUENCIA DE
FLUIDOS (CURVA IPR)
En 1968, J.V. Vogel desarrolló un modelo matemático para calcular el IPR
de un yacimiento con empuje de gas disuelto. El resultado de su estudio es
14
una curva de referencia sin dimensiones que se ha convertido en una
herramienta efectiva en la definición del comportamiento de afluencia del
pozo. La ecuación empírica desarrollada por Vogel es la siguiente:
𝑞𝑜
𝑞𝑜𝑚𝑎𝑥= 1 − 0,2 (
𝑃𝑤𝑓
𝑃𝑟) − 0,8 (
𝑃𝑤𝑓
𝑃𝑟)
2
[Ec. 3]
Donde:
qo = Tasa de flujo, bls
Pwf = Presión de fondo fluyente, psi
Pr = Presión promedio del yacimiento, psi
qmax = Caudal máximo de producción (a Pwf = 0), bls
En los pozos que producen bajo empuje hidráulico, el IP permanece
constante para una amplia variación en la tasa de flujo, de tal forma que ésta
es directamente proporcional a la presión diferencial de fondo.
En pozos con alta tasa de flujo o en yacimientos con empuje de gas en
solución, la proporcionalidad no se mantiene y el IP disminuye, esto se debe
a:
Efecto de la turbulencia por el aumento de la tasa de flujo.
Aumento de la viscosidad con la caída de presión por debajo del
punto de burbuja.
Reducción de la permeabilidad debido al daño de formación.
El índice de productividad se puede calcular usando una versión modificada
de la ecuación de Vogel para yacimientos en los cuales la presión de prueba
se encuentra por debajo de la presión del punto de burbuja.

15
𝐼𝑃 = 𝑞𝑜
Pr − 𝑃𝑏 + (𝑃𝑏1,8) . [1 − 0,2 (
𝑃𝑤𝑓𝑃𝑟 ) − 0,8 (
𝑃𝑤𝑓𝑃𝑟 )
2
]
[Ec. 4]
Para calcular cualquier caudal de flujo mayor a qb (donde Pwf < Pb), la
ecuación de Vogel se puede expresar de la siguiente manera:
𝑞𝑜 = 𝑞𝑏 + (𝑞𝑚𝑎𝑥 − 𝑞𝑏). [1 − 0,2 (𝑃𝑤𝑓
𝑃𝑟) − 0,8 (
𝑃𝑤𝑓
𝑃𝑟)
2
]
𝑞𝑜 = 𝑞𝑏 + 𝐼𝑃 . 𝑃𝑏
1,8 . [1 − 0,2 (
𝑃𝑤𝑓
𝑃𝑟) − 0,8 (
𝑃𝑤𝑓
𝑃𝑟)
2
]
[Ec. 5]
Donde:
qo = Caudal de flujo a una determinada presión, bls
Pwf = Presión de flujo, psi
Pb = Presión de burbuja, psi
qmax = Caudal máximo de producción (a Pwf = 0), bls
La relación de Vogel trabaja bien en pozos con cortes de agua bajo el 50%.
Para cortes de agua más altos, se ha desarrollado un método, el cual toma
un promedio aritmético de las ecuaciones del IP e IPR para obtener un “IPR
Compuesto”.
2.6. COMPORTAMIENTO DE LAS PRESIONES
El comportamiento de las presiones (estáticas y fluyentes) nos permiten
hacer una evaluación de las condiciones del reservorio: caídas de presiones
del yacimiento a través del tiempo o ganancia de presión en caso de
recuperación mejorada, que nos permite proyectar producción de petróleo,

16
agua y gas a futuro; y prever proyectos de recuperación mejorada e
implementación de algún tipo de levantamiento artificial en un determinado
momento de la vida productiva del campo.
La presión estática del yacimiento (Pr) y la fluyente (Pwf), son obtenidas
mediante medidores de presión mecánicos (Ameradas) y Electrónicos
(Memory Gages).
2.7. PRUEBAS DE RESTAURACIÓN DE PRESIÓN
(BUILD-UP)
Cuando las pruebas de producción lo ameritan, es decir cuando el pozo es
capaz de producir a flujo natural y tiene un bajo corte de agua, es
recomendable tomar presiones fluyentes y estáticas del pozo realizando una
prueba de restauración de presión. Si el pozo no fluye, al menos debe
tomarse presiones estáticas en el proceso de evaluación de formaciones
mediante bombeo hidráulico, en un momento considerado adecuado, con los
elementos ubicados con wireline en el BHA, el procedimiento aplicado es
similar a lo indicado cuando el pozo se encuentra a flujo natural. Luego se
registra la presión de fondo fluyente durante un tiempo que se estime
conveniente, el mismo que es aprovechado generalmente para efectuar una
prueba de producción del pozo. Concluido el tiempo de flujo, se cierra el
pozo y se inicia la restauración de presión del mismo durante cierto tiempo,
se sacan los elementos de presión mecánicos o electrónicos a tiempos
preestablecidos que normalmente son los mismos que cuando se bajaron,
para así registrar las presiones estáticas.
Al finalizar el Build-up, la herramienta es sacada del pozo y éste es abierto
para que continúe fluyendo. Las cartas de presión o registros electrónicos
son analizadas mediante métodos de ingeniería.

17
El análisis de los Build-up registrados a las arenas productoras de un pozo,
es uno de los parámetros importantes del yacimiento, que permite conocer el
comportamiento real del mismo, consecuentemente poder adoptar
decisiones inmediatas con el objeto de mantener su presión y regular la
producción del pozo.
El correcto análisis de los datos obtenidos, es un proceso en el cual el pozo
produce un volumen a una cierta presión fluyente y luego se produce un
cierre para obtener la presión estática, permitiendo obtener los parámetros
básicos del yacimiento para la toma adecuada de decisiones.
Los métodos más comunes para la evaluación son: El método de Horner,
MDH y Curvas tipos.
Del análisis de las pruebas de restauración de presión se obtienen los
siguientes resultados:
Los pozos han tenido daños muy altos o moderados.
Los parámetros como Pwf, Pr, qo, son los valores más realistas que se
utilizan para hacer los respectivos diseños de levantamiento artificial.
Como es lógico el Índice de Productividad Actual (IPA), antes de remover
el daño es menor al Índice de Productividad Ideal (IPI). Las pérdidas de
presión debido al daño de formación (P skin), cuando tienden a cero, no
hay ganancia después de remover el daño.
La pendiente depende del criterio y experiencia del que la interpreta.
2.8. VOLUMEN TOTAL DE FLUIDOS
Cuando la presión a la entrada de la bomba, sea menor que la presión de
burbuja, es necesario determinar el efecto del gas en el volumen de fluido a
bombear a fin de seleccionar la bomba apropiada, para lo cual hay que

18
determinar los volúmenes de petróleo, agua y gas libre a producir.
La mayor preocupación es el gas libre en el fluido a producir, ocupa un
espacio en el impulsor que es normalmente ocupado por el crudo. Esto
reduce la eficiencia volumétrica, lo que significa que si queremos producir 1
barril de petróleo en la superficie, necesitaremos producir más en el fondo.
En conclusión, para obtener un correcto diseño del equipo es necesario
considerar todas las propiedades del fluido a producir, Presión, Volumen y
Temperatura (PVT), reflexionar las limitaciones físicas y utilizar varias
correlaciones.
2.9. COMPONENTES DEL SISTEMA ELÉCTRICO
SUMERGIBLE (BES O ESP) Y SUS APLICACIONES
Los componentes básicos de subsuelo de un sistema de BES son: motor,
protector, intake, bomba, cable de conexión del motor y cable de potencia.
Entre los elementos complementarios del sistema están el separador de gas,
manejador avanzado de gas AGH y la unidad sensora de presión y
temperatura, DMT. Algunos de los accesorios comúnmente usados son
válvulas check y bleeder, centralizadores, protectores de cable, “Y” tool,
empacaduras, conectores eléctricos y sistemas de inyección de químicos.
2.9.1. LA BOMBA
Una bomba centrífuga es una máquina que mueve fluidos rotándolos con un
impulsor rotativo dentro de un difusor que tiene una entrada central y una
salida tangencial. La trayectoria del fluido es una espiral que se incrementa
desde la entrada en el centro a la salida tangente al difusor. El impulsor
transmite energía cinética al fluido.

19
En el difusor, parte de la energía cinética es transformada en energía
potencial (altura) por medio de un incremento del área de flujo. Una bomba
centrífuga crea presión por medio de la rotación de una serie de álabes en
un impulsor.
El alma del sistema BES es la bomba centrífuga, de tipo multietapa, y el
número de éstas depende de cada aplicación específica. La geometría de la
etapa determina el volumen de fluido que maneja la bomba y el número de
etapas determina el levantamiento total generado (TDH). Las bombas se
construyen en un amplio rango de capacidades para diferentes tamaños de
tuberías de revestimiento.
Cada etapa tiene un impulsor y un difusor. La parte rotativa, el impulsor o
impeler, genera fuerzas centrífugas que aumentan la velocidad del fluido
(energía cinética), y la parte estacionaria, el difusor, dirige el fluido de la
forma adecuada al siguiente impulsor, transformando parte de la energía
cinética en energía potencial elevando la presión de descarga.
Figura 01. Bomba y sus componentes
Weatherford, 2006. Electric Submersible Pumping Systems
El fluido entra al impulsor por un orificio interno, cercano al eje y sale por el
diámetro exterior del impulsor. El difusor dirige el fluido hacia el siguiente
impulsor. El impulsor es fijo al eje. El difusor es estático dentro de la carcasa
o housing de la bomba.
20
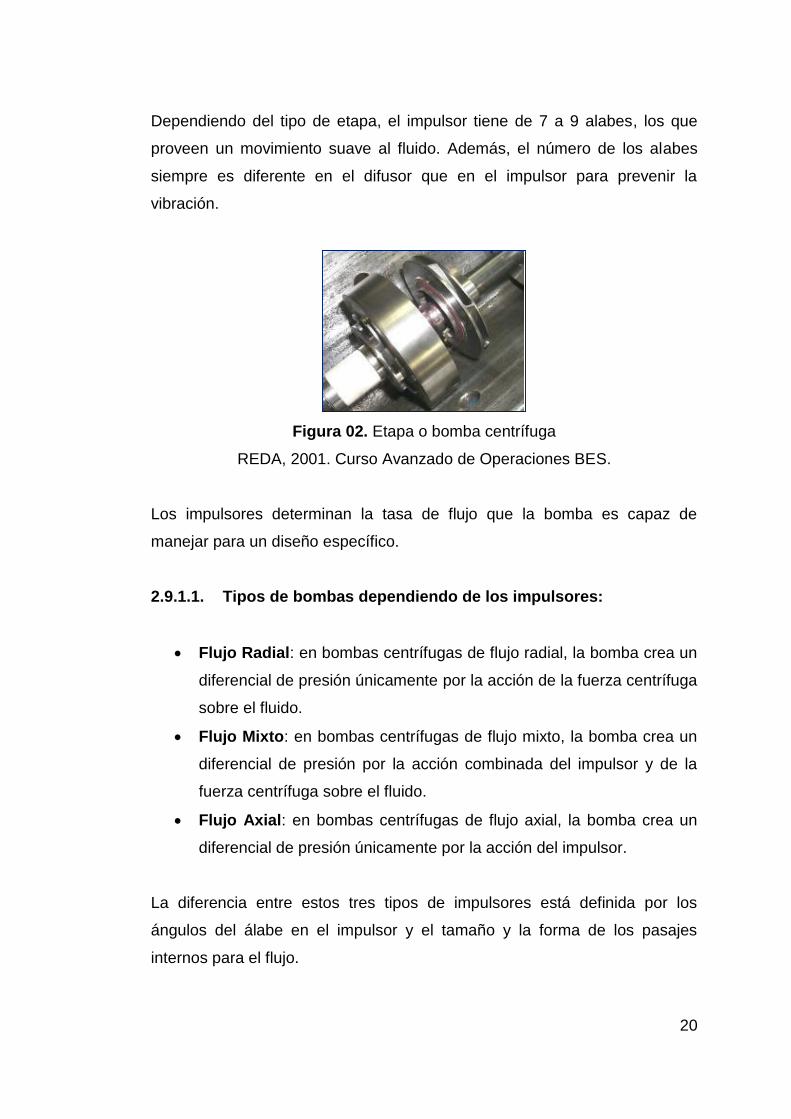
Dependiendo del tipo de etapa, el impulsor tiene de 7 a 9 alabes, los que
proveen un movimiento suave al fluido. Además, el número de los alabes
siempre es diferente en el difusor que en el impulsor para prevenir la
vibración.
Figura 02. Etapa o bomba centrífuga
REDA, 2001. Curso Avanzado de Operaciones BES.
Los impulsores determinan la tasa de flujo que la bomba es capaz de
manejar para un diseño específico.
2.9.1.1. Tipos de bombas dependiendo de los impulsores:
Flujo Radial: en bombas centrífugas de flujo radial, la bomba crea un
diferencial de presión únicamente por la acción de la fuerza centrífuga
sobre el fluido.
Flujo Mixto: en bombas centrífugas de flujo mixto, la bomba crea un
diferencial de presión por la acción combinada del impulsor y de la
fuerza centrífuga sobre el fluido.
Flujo Axial: en bombas centrífugas de flujo axial, la bomba crea un
diferencial de presión únicamente por la acción del impulsor.
La diferencia entre estos tres tipos de impulsores está definida por los
ángulos del álabe en el impulsor y el tamaño y la forma de los pasajes
internos para el flujo.

21
Los impulsores radiales (panqueca) tienen los ángulos cercanos a 90°, los
cuales son encontrados usualmente en bombas de bajas tasas de flujo.
Figura 03. Impulsor radial
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Un impulsor de flujo mixto tiene los ángulos de los álabes cercanos a 45°,
los cuales son usualmente encontrados en las bombas para altas tasas de
flujo.
Figura 04. Impulsor de flujo mixto
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Los impulsores axiales tienen una geometría diferente y se pueden ver como
una forma de hélice.

22
Figura 05. Impulsor de flujo axial
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
2.9.1.2. Tipos de bomba según su construcción:
Construcción Flotante: Cada impulsor es libre de moverse hacia
arriba y hacia abajo en el eje como si “flotara” en el mismo.
Construcción Compresión: Cada impulsor está rígidamente fijo al
eje de tal manera que se mueve solidariamente con el mismo. Todos
los impulsores están “comprimidos” conformando un cuerpo rígido.
Figura 06. Tipos de bomba según su construcción
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
23
Bomba de compresión: todos los impulsores están fijados rígidamente al
eje de manera que si un impulsor trata de moverse hacia arriba o abajo,
tratará de mover el eje en esa dirección.
Durante el ensamblaje y debido a la gravedad, el impulsor normalmente está
descansando en su correspondiente difusor inferior. Por esta razón, el eje de
la bomba es “levantado” con espaciadores en el acople de tal manera que el
impulsor no toca el difusor en el equipo ensamblado.
Esto hace que todo el empuje desarrollado en el eje de la bomba sea
transferido directamente al eje del protector.
Tradicionalmente, este tipo de bomba ha sido usado en aplicaciones con
muy alto empuje descendente (ej. bomba con muchas etapas).
Por qué usar bombas de compresión:
Algunas etapas generan demasiado empuje para ser manejado por
una arandela de empuje en la etapa.
Algunos fluidos (ej. propano líquido) no tiene suficiente capacidad de
lubricación para lubricar la arandela de empuje.
Si hay abrasivos o corrosivos, sería beneficioso manejar el empuje en
un área lubricada por aceite de motor en vez del fluido del pozo.
Ocasionalmente en pozos con mucho gas, el volumen de flujo cambia
tan drásticamente dentro de la bomba que una parte de una bomba
de flotación podría estar con severo empuje descendente, mientras
que otras no. Una bomba de compresión podría mejorar esta
situación.
Ya que todo el empuje es manejado por el protector, el rango de
operación puede ser extendido ampliamente, sin incremento del
desgaste o reducción de la vida útil, en la medida que el protector
tenga la capacidad suficiente para manejar el empuje desarrollado.

24
Bomba de flotación: en vista que los impulsores flotantes son libres de
moverse en el eje, hacia arriba o hacia abajo, lo único que lo detiene es el
difusor superior o el inferior. Las “arandelas de empuje” son usadas para
proveer, en todos los pares de superficie entre el impulsor y el difusor, para
absorber el empuje generado.
Figura 07. Bomba de construcción flotante
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Por qué usar bombas de flotación:
En vista que cada etapa maneja su propio empuje, un gran número de
etapas se puede poner en una bomba sin tener que preocuparse
acerca de la capacidad del cojinete de empuje del protector.
Las bombas de flotación son muy buenas en ambientes
medianamente abrasivos, ya que previenen que los sólidos entren a
la zona del cojinete radial.
Las bombas de flotación son más flexibles bajo el punto de vista de
manufactura, ya que la tolerancia acumulada no es un problema.
El ensamblaje en el campo no requiere espaciamiento.
2.9.1.3. Rango de Operación de una bomba
La geometría interna de la bomba controla cuánto volumen puede pasar a
través de la misma.

25
Figura 08. Curva de rendimiento de una bomba
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Para determinar si una bomba está operando en Downtrhust o en Uptrhust
tenemos que volver a revisar el impulsor de la bomba y otro concepto
adicional conocido como empuje en las etapas de la misma: un Impulsor
tiene tres fuerzas actuando sobre él. La suma de estas tres fuerzas es el
empuje total.
Figura 09. Fuerzas que actúan sobre el impulsor
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción

26
Veamos cuales son estas fuerzas:
Fuerza Dirección del esfuerzo
Gravedad actuando sobre la masa
del eje y del impulsor Siempre descendente
La fuerza neta resultante del
diferencial de presión actuando
sobre la etapa
Puede ser descendente o
ascendente o cero (cero ocurre a
flujo abierto – sin presión a la
descarga)
La fuerza del momento del fluido
entrando en la etapa
Puede ser ascendente o cero (cero
ocurre a la presión de cierre – o
condiciones de no flujo)
Tabla 01. Fuerzas que actúan sobre el impulsor
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
En general, mayores diámetros de impulsor generarán mayor empuje
descendente que impulsores más pequeños para la misma tasa de flujo,
porque tienen una superficie más grande sobre la cual la diferencia de
presión puede actuar. También tienen más masa.
El método de manejo del empuje ejercido por la bomba varía dependiendo
del tipo de construcción del impulsor: Compresoras o Flotantes
Sin embargo, no solamente el empuje es producido en los impulsores.
También por el diámetro que tiene el eje, éste sufre un empuje producto de
una fuerza descendente dado por el peso de la columna de fluido.
Por lo anterior, el empuje total será la suma del empuje en el impulsor y el
del eje.
Si la etapa es de "compresión", el empuje no es relevante al
determinar el rango de operación.

27
En la bomba de compresión, no podemos separar el empuje del
impulsor y el del eje, ya que forman un solo cuerpo integrado.
Las bombas de gran diámetro tienen ejes de mayor diámetro, por lo
tanto, para una misma cantidad de trabajo ellas tienen mayor empuje
en el eje.
Por otro lado, las bombas de mayor diámetro, pueden y deben usar
protectores más grandes los cuales pueden manejar cargas de
empuje mucho más altas.
Debemos considerar el empuje del eje de una bomba de construcción
flotante o el empuje total de una bomba de una bomba de compresión
cuando se selecciona el protector.
El operar una bomba fuera del rango requiere una bomba y motor
más grandes así como más electricidad para la operación.
2.9.1.4. Nomenclatura de una bomba
La descripción numérica se usa para referirse a la tasa de flujo de las
bombas en el punto de mejor eficiencia en barriles por día (BPD). Cada
fabricante identifica la serie con una letra, seguida de otras letras o números
que corresponden al modelo.
Serie Centrilift SLB
338 DC A
400 F D
513 G G
562 K HN
675 HC J
875 I M (862)
1025 J P (1125)
Tabla 02. Nomenclatura de las bombas
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
28
Ejemplo:
Una bomba DN1300 (SLB) define:
D = Serie 400; por lo tanto, 4” de diámetro externo
N = El material de la etapa, en este caso es Ni – resist
1300 = Tasa de flujo en el punto de mejor eficiencia (BEP)
(60 Hz : 3500 RPM) en barriles por día
2.9.2. LA SECCIÓN DE ENTRADA O INTAKE
Lo ideal sería que un pozo produzca con una presión de sumergencia
superior a la presión de burbujeo, para mantener los gases en solución a la
entrada de la bomba. Sin embargo, esto normalmente no ocurre, por lo cual
los gases deben separarse del fluido mediante un separador de gas antes de
la entrada de la bomba para alcanzar una máxima eficiencia del sistema.
2.9.3. SEPARADOR DE GAS / ADMISIÓN
La función del separador de gas es para proporcionar una vía para el fluido
del pozo hacia la bomba, pero también separa y elimina el gas antes que
llegue a la bomba. El gas en un pozo sale de la solución en forma similar a
como el CO2 sale como burbujas de un refresco cuando se quita la tapa.
Cuando la presión del fluido disminuye suficientemente, el gas comienza a
salir de la solución. El gas no es necesariamente bueno para la bomba. Las
burbujas de gas ocupan un espacio valioso en el impulsor y los pasajes de
flujo.
Si hay demasiado gas, las burbujas afectan el rendimiento de la bomba,
desplazando el líquido y causando que la bomba se trabe por el gas; lo que
provocará:

29
Pérdida de producción
Ciclos de encendido y apagado por la insuficiente carga sobre el
motor.
Los separadores de gas son también secciones de entrada pero tienen
algunos componentes adicionales diseñados para evitar el paso de gas libre
hacia la bomba.
El Separador de Gas Rotatorio, es el más efectivo, utiliza la fuerza centrífuga
para el proceso de separación.
Un inductor en forma de taladro proporciona elevación (presión) sobre el
fluido. A medida que el fluido sube en el separador, las paletas en el
conjunto del inductor fuerzan al fluido más denso a ir hacia fuera, mientras el
gas menos denso tiende a moverse hacia el diámetro interno del eje. El
fluido más pesado entonces es conducido por orificios en el cabezal hacia el
diámetro interno de la bomba y el gas menos denso es dirigido a través de
otro conjunto de orificios hacia el exterior del separador, y de nuevo dentro
del anillo del pozo.
Figura 10. Separador de gas rotativo
REDA, 2001. Curso Avanzado de Operaciones BES.

30
2.9.4. EL MOTOR DE LA BES
Es un motor eléctrico colocado en la parte inferior del sistema, recibe la
energía desde una fuente superficial, a través del cable. Son motores de
inducción, trifásicos, tipo jaula de ardilla, con dos polos. Estos motores giran
a 3475 rpm a 60 Hz; están llenos completamente de aceite mineral
altamente refinado o con aceite sintético, el cual lubrica los cojinetes y
provee resistencia dieléctrica y conductividad térmica para disipar el calor
generado hacia el housing del motor. El voltaje de diseño y operación de
estos motores puede ser tan bajo como 230V, o tan alto como 5000V. Los
requerimientos de amperaje pueden variar entre 12 y 110Amps. El motor
puede ser utilizado con corriente alterna a 60 Hz o 50 Hz. La cantidad de HP
simplemente incrementará la longitud del motor.
El motor consta de rotores, usualmente de 12 a 18 pulgadas de largo,
montados sobre un eje y ubicados en un campo magnético (estator)
construido dentro del housing.
Los motores están disponibles en cinco series diferentes: 375, 456, 540, 562
y 738 para aplicaciones en pozos con casing de diámetro externo de
4.50",5.50", 6.625", 7.00", 8.625” y mayores, respectivamente.
El comportamiento de los motores cambia de acuerdo a la carga a la que
están sometidos. Cada tipo de motor tiene sus curvas de rendimiento de
velocidad, factor de potencia, eficiencia y amperaje en función del porcentaje
de carga.
El motor tiene un cojinete de empuje o thrust bearing que soporta la carga de
los rotores y eje, y al igual que el cojinete de un protector también es de
zapata sólida.

31
Se dispone de diferentes tipos de motores para cubrir la demanda en
diferentes tipos de aplicaciones y condiciones de operación. El rango de
potencia de los motores cubre aplicaciones desde 7.5 HP hasta 1,170 HP en
casing de 7 pulgadas.
Los factores que se consideran en el proceso de selección del motor
incluyen:
Serie del motor,
Tipo de motor,
Configuración del motor, voltaje, amperaje, sección simple o tándem.
Características de operación a las condiciones de diseño y máxima
temperatura de operación del motor.
En la selección del aceite a usarse intervienen tres factores principales: la
temperatura de fondo (BHT), la temperatura de operación del motor (MOT) y
la potencia del motor. En ciertas condiciones también la temperatura
ambiente puede ser decisiva.
2.9.5. EL PROTECTOR
El Protector está ubicado entre el intake de la bomba y el motor. Tiene tres
funciones principales:
Proveer un sello y equilibrar las presiones interna y externa para
evitar que el aceite del motor sea contaminado por el fluido del pozo,
actuando también como un reservorio de aceite para el motor.
Soportar la carga axial (empuje) desarrollada por la bomba.
Transmitir el torque desarrollado en el motor hacia la bomba, a través
del eje del protector.

32
El diseño de laberinto utiliza la diferencia entre gravedad específica de los
fluidos del pozo y el aceite del motor, por lo que están separados aunque
estén en contacto.
La cámara del laberinto está aislada de la rotación del eje por un tubo
exterior al eje, por lo tanto no se mezcla cuando gira la unidad.
Hay aplicaciones donde el sistema de laberinto no es aplicable. Por ejemplo,
en casos donde el fluido del pozo es más liviano que el aceite del motor, el
aceite del motor iría al fondo de la cámara y sería desplazado rápidamente
por el fluido del pozo.
Los protectores de laberinto tampoco deben ser aplicados en pozos
horizontales o altamente desviados. El diseño de la separación de la
gravedad requiere que la unidad esté en posición vertical, o casi vertical.
Mientras mayor es el ángulo, menor será la capacidad de expansión del
aceite.
Para aplicaciones donde las gravedades específicas del fluido del pozo y del
aceite de motor son similares o en pozos bastante desviados, se utilizan
protectores de "sello positivo" ó "bolsa", los cuales mantienen separados
físicamente los dos fluidos.
Figura 11. Protector de Sello Positivo o Bolsa
REDA, 2001. Curso Avanzado de Operaciones B.E.S.
La bolsa adapta su
volumen como
sea necesario y al
mismo tiempo
mantiene los dos
fluídos físicamente
separados.
Bolsa de
Elastómero

33
Este tipo de protectores utilizan una bolsa, la cual está hecha de un
elastómero de alta temperatura y alto rendimiento que puede resistir las
severas condiciones típicamente encontradas en los pozos de petróleo. La
bolsa mantiene el fluido del pozo en el exterior y el aceite limpio del motor en
el interior.
Cuando el aceite del motor se expande o se contrae, la bolsa simplemente
se infla o se contrae para adaptarse al cambio de volumen.
Se debe tener cuidado en las aplicaciones de este tipo de protector en pozos
con fluidos que contienen químicos o que son tratados continuamente con
químicos, ya que esto produce que la goma se dañe. Si el sello positivo se
rompe, el motor puede ser contaminado fácilmente con el fluido del pozo.
2.9.6. CABLE DE POTENCIA
La potencia es transferida al motor electro sumergible por medio de un cable
de potencia trifásico, el cual se fija a la tubería de producción por medio de
flejes o con protectores sujetadores especiales. Este cable debe ser
pequeño en diámetro, bien protegido de la exigencia mecánica y resistente
al deterioro de sus características físicas y eléctricas por efecto de los
ambientes calientes y agresivos de los pozos.
Su función es además transferir las señales de presión, temperatura, etc.
desde el instrumento sensor de fondo a la superficie. Los cables están
disponibles en una variedad de tamaños de conductor, que permiten una
eficiente adecuación a los requerimientos del motor. Todos los cables están
fabricados con especificaciones rigurosas empleando materiales
especialmente diseñados para diferentes aplicaciones.
34
2.10. ACCESORIOS, CONTROL ELÉCTRICO Y EQUIPO DE
SERVICIO
2.10.1. CONTROLADOR DEL MOTOR
Es un dispositivo de protección y control de operación, que consiste en:
arrancador del motor, protección por sobrecarga y baja carga, una llave
manual para desconectarlo, retardo de tiempo y amperímetro registrador.
2.10.2. CONTROLADOR DE VELOCIDAD VARIABLE
Por lo general hay pozos que trabajan a velocidad constante para un mismo
ciclaje; pero en otros casos, otros pozos son dinámicos en cuanto a
parámetros de presión de fondo, producción, relación gas – aceite y otros.
El controlador de velocidad variable permite alterar la frecuencia del voltaje
que alimenta al motor y por lo tanto modificar su velocidad. El rango de
ajuste de la frecuencia es de 30 Hz a 90 Hz, lo que implica su amplio rango
de velocidades y por lo tanto, los caudales que son posibles manejar. Una
alta frecuencia incrementa la velocidad del motor, el caudal y la presión; una
baja frecuencia, los disminuye.
Figura 12. Controlador de Frecuencia Variable
REDA, 2001. Curso Avanzado de Operaciones B.E.S.

35
2.10.3. SENSORES DE FONDO
Existen diferentes tipos de dispositivos que tienen la capacidad de
monitorear continuamente la presión de fondo de pozo a la profundidad de
operación de la bomba, determinar la temperatura de pozo y operación y
detectar fallas eléctricas, tales como cortos a tierra.
Este sistema no requiere cables especiales, dado que todas las señales son
enviadas a los instrumentos de superficie a través del cable de potencia
regular.
2.10.4. CAJA DE CONEXIONES
Llamada caja de venteo, cumple las siguientes funciones:
Provee un venteo a la atmósfera para que el gas pueda migrar a la
superficie por el interior del cable de potencia del pozo.
Provee un lugar donde conectar el cable de potencia que viene del
controlador, con el cable de potencia que viene del pozo.
2.10.5. TRANSFORMADORES MONOFÁSICOS Y TRIFÁSICOS
La distribución de la energía eléctrica en los campos petroleros se realiza
generalmente a voltajes intermedios, como 6000 voltios o más. Debido a que
el equipo BES funciona con voltajes entre 500 y 4000 voltios, se requiere la
variación del voltaje de distribución.
El tamaño del transformador seleccionado depende de las medidas del
voltaje en superficie calculado. Los auto – transformadores elevadores de
voltaje trifásico son los elegidos normalmente para elevar el voltaje desde un
sistema de bajo voltaje, mientras que se elige usualmente un banco de tres
transformadores monofásicos para reducir desde una fuente de energía de
36
alto voltaje hasta el requerido en superficie.
2.10.6. CABEZAL DE BOCA DE POZO
Este elemento soporta todo el peso del equipo ESP de fondo (motor, sello,
cable) y la tubería de producción (tubing). El cabezal de boca de pozo está
equipado con un dispositivo que permite sellar positivamente alrededor del
cable y el tubing, para evitar las fugas de gas.
2.10.7. VÁLVULA DE RETENCIÓN
Se puede usar una válvula de retención (check) para mantener una columna
completa de fluido sobre la bomba; generalmente ubicada de 2 a 3 tramos
de tubería por encima de la descarga de la bomba, para mantener una
columna llena de fluido sobre la bomba; si la válvula de retención no ha sido
instalada, cuando la bomba se detenga, la pérdida de fluido desde el tubing
a través de la bomba puede originar una rotación en reversa de la unidad
sumergible. Si se intenta poner en marcha durante esta rotación inversa, se
puede quemar el motor o el cable, o romper el eje. En aquellas instalaciones
donde no se use válvula de retención, se debe dar bastante tiempo al fluido
como para que equilibre niveles a través de la bomba antes de intentar re-
arrancar.
2.10.8. VÁLVULA DE DRENAJE
Cuando se utilice una válvula de retención en la tubería de producción, se
recomienda instalar una válvula de drenado inmediatamente por arriba de la
válvula de retención (check) para evitar la eventual remoción de la tubería
con todo el fluido contenido en él. Si no se usa válvula de retención y el pozo
no tiene problemas de arena, no hay razón para usar dicha válvula, dado
que el fluido drenará a través de la bomba a medida que se vaya sacando el
equipo de fondo.

37
2.10.9. CENTRALIZADORES
Se utilizan para centrar el motor y la bomba a efectos de tener un buen
enfriamiento, y en algunos casos para impedir que el cable se dañe por
rozamiento contra la pared del pozo. También los centralizadores ayudan a
prevenir que se dañe el recubrimiento especial para corrosión durante la
instalación.
Si se usan centralizadores, estos deben permanecer fijos, que no giren o se
muevan hacia arriba o hacia abajo en el tubing.
2.10.10. BANDAS PARA SUJETAR EL CABLE (FLEJES)
Los flejes se utilizan para fijar el cable de potencia a la tubería de
producción. Se utiliza generalmente un intervalo de 15 pies entre los flejes.
También se utilizan los flejes para fijar el cable de extensión del motor a la
bomba y al sello; se recomienda el uso de un fleje cada 18 pulgadas y el
empleo de guarda cables para máxima protección.
2.10.11. CABLE PLANO DE EXTENSIÓN DEL MOTOR
El cable plano de extensión del motor pasa desde el motor a lo largo de la
sección sello, el separador de gas, y la bomba, más un mínimo de 6 pies por
encima de la cabeza de descarga de la bomba. Se utiliza el cable plano
debido al limitado espacio anular entre el diámetro exterior del equipo y el
diámetro interior de la tubería de revestimiento, aunque, si el espacio existe,
existe también cable redondo.
2.10.12. PROTECTORES DE CABLE PLANO
Se utilizan protectores especiales para el cable por protección mecánica.

38
Son para proteger el cable plano, con una longitud de por lo menos igual a la
longitud de la bomba más 9 pies.
2.10.13. RUEDA GUÍA DEL CABLE
Se cuelga en el mástil o torre. Ayuda a evitar el daño del cable cuando se
instala o se saca el equipo del pozo; tiene un radio de curvatura adecuado
para el cable de mayor sección.
CAPÍTULO III
39
CAPÍTULO III
3. METODOLOGIA
3.1. RECOMENDACIÓN PRACTICA API 11 S2 PARA
PRUEBAS DE BOMBAS ESP
La recomendación práctica API 11 S2, cubre las pruebas de aceptación a
seguir fijadas como especificaciones mínimas de bombas eléctricas
sumergibles.
Esta recomendación práctica, provee líneas de guía y procedimientos para
cubrir las pruebas de desempeño de las bombas eléctricas ESP para
establecer la consistencia del producto.
De acuerdo con lo establecido en ésta recomendación práctica, la desviación
de las curvas de rendimiento de la bomba se comparan con las curvas
patrón del catálogo.
La siguiente prueba de aceptación es recomendada para asegurarse que las
bombas han sido correctamente manufacturadas y ensambladas.
3.2. JUEGO TERMINAL DEL EJE
Es el máximo desplazamiento axial permitido, medido desde el tope de la
cara de la brida de la cámara de sellado al final del eje.
La primera medida se toma desde la cara de la brida al final (se toma con el
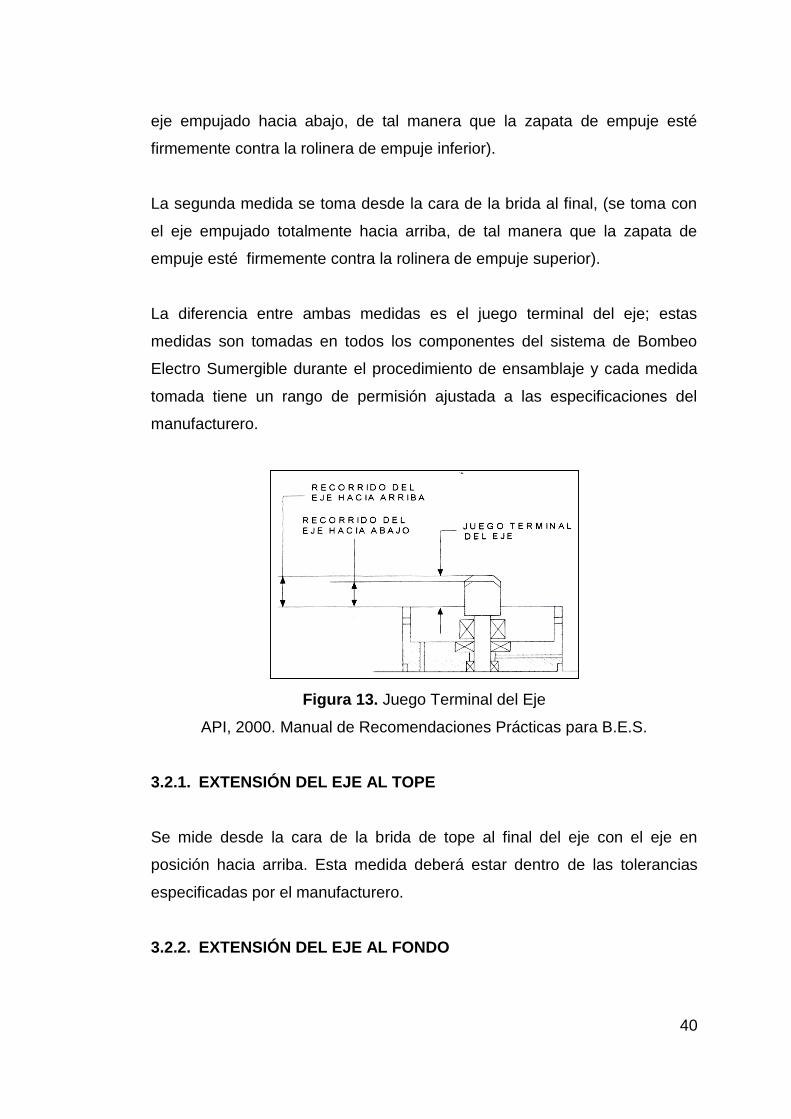
40
eje empujado hacia abajo, de tal manera que la zapata de empuje esté
firmemente contra la rolinera de empuje inferior).
La segunda medida se toma desde la cara de la brida al final, (se toma con
el eje empujado totalmente hacia arriba, de tal manera que la zapata de
empuje esté firmemente contra la rolinera de empuje superior).
La diferencia entre ambas medidas es el juego terminal del eje; estas
medidas son tomadas en todos los componentes del sistema de Bombeo
Electro Sumergible durante el procedimiento de ensamblaje y cada medida
tomada tiene un rango de permisión ajustada a las especificaciones del
manufacturero.
Figura 13. Juego Terminal del Eje
API, 2000. Manual de Recomendaciones Prácticas para B.E.S.
3.2.1. EXTENSIÓN DEL EJE AL TOPE
Se mide desde la cara de la brida de tope al final del eje con el eje en
posición hacia arriba. Esta medida deberá estar dentro de las tolerancias
especificadas por el manufacturero.
3.2.2. EXTENSIÓN DEL EJE AL FONDO

41
Se mide desde la cara de la brida de tope al final con el eje en posición hacia
abajo. Esta medida deberá estar dentro de las tolerancias especificadas por
el manufacturero.
3.3. DEFINICIONES
3.3.1. PUNTO DE PRUEBA ACEPTABLE
Son los puntos de pruebas que están dentro del criterio permisible de
aceptación de la prueba de la bomba.
3.3.2. LEYES DE AFINIDAD
Son las interrelaciones entre el desempeño de la bomba y las razones de
velocidad de la bomba. Para propósitos de prueba, las razones de velocidad
son entre los rpm fijados y los rpm probados.
probado freno de HP probada rpm
fijada rpm freno de HP ajuste de Velocidad
probada cabeza probada rpm
fijada rpm cabeza de ajuste de Velocidad
prueba de flujo probada rpm
fijada rpm flujo del ajuste de Velocidad
3
2
x
x
x
[Ec. 6]
Al cambiar la velocidad operacional de una bomba centrífuga, las
características de desempeño de la bomba cambiarán respectivamente.
Estos cambios se pueden predecir mediante el uso de las Leyes de Afinidad,

42
las cuales gobiernan el desempeño de la bomba centrífuga, a medida que
ocurren cambios en la velocidad de operación.
Las leyes mostraron que para condiciones dinámicamente similares o
relativamente comunes, algunos parámetros adimensionales permanecían
constantes. Cuando se aplican a cada punto sobre una curva de desempeño
altura de columna – caudal, estas leyes demuestran como con cambios de
velocidad de operación: la capacidad es directamente proporcional a la
velocidad; la altura de columna generada es proporcional al cuadrado de la
velocidad; la potencia al freno es proporcional al cubo de la velocidad; y la
potencia generada por el motor es directamente proporcional a la velocidad.
3.3.3. BANDA PERMISIBLE DE DESARROLLO DE LA TASA DE FLUJO
DE CABEZA
Una región a cada lado de la curva de desempeño de la tasa de flujo de
cabeza publicada.
Los límites de esa banda son definidos por una serie de vectores con su
origen sobre la curva de desempeño de flujo de cabeza publicada. Los
vectores son definidos por la aplicación de las tolerancias de cabeza y flujo.
3.3.4. PUNTO DE MEJOR EFICIENCIA (BEP)
Define los parámetros de desempeño de la bomba al máximo valor sobre la
curva de eficiencia.
3.3.5. CABALLOS DE FUERZA DE FRENO (BHP)
La potencia requerida por la bomba corregida para un fluido con una
gravedad especifica de 1.0.
3.3.6. EFICIENCIA (EFF)
43
Medida de la potencia de salida dividida para la potencia de entrada.
Solamente para la bomba:
BHP * C
flujo) de (tasa * cabezaEFF
[Ec. 7]
Donde: C es una constate de conversión de unidades.
3.3.7. TASA DE FLUJO
La tasa volumétrica de fluido entregado por la bomba.
3.3.8. PRUEBA DE FLUJO ABIERTO
Tasa de flujo máximo obtenible bajo prueba. Esta tasa está entre la máxima
tasa de flujo recomendable y flujo abierto.
3.3.9. PRUEBA DE APAGADO
Tasa de flujo mínima de la bomba obtenible bajo prueba. Este punto está
entre flujo cero y el mínimo flujo recomendable.
3.4. DATOS Y CARTAS: CURVAS DE DESEMPEÑO
La bomba tiene, para una velocidad y una viscosidad del fluido estándares,
una curva de desempeño que indica la relación entre la altura de columna
desarrollada por la bomba y el gasto que circula a través de la bomba; ésta
curva se basa en el desempeño actual de la bomba en condiciones
específicas. En una curva típica de rendimiento se puede apreciar el
comportamiento de la eficiencia de la bomba, la cabeza de descarga, los
caballos de fuerza de frenado y el rango óptimo de operación en función de
la taza de flujo.
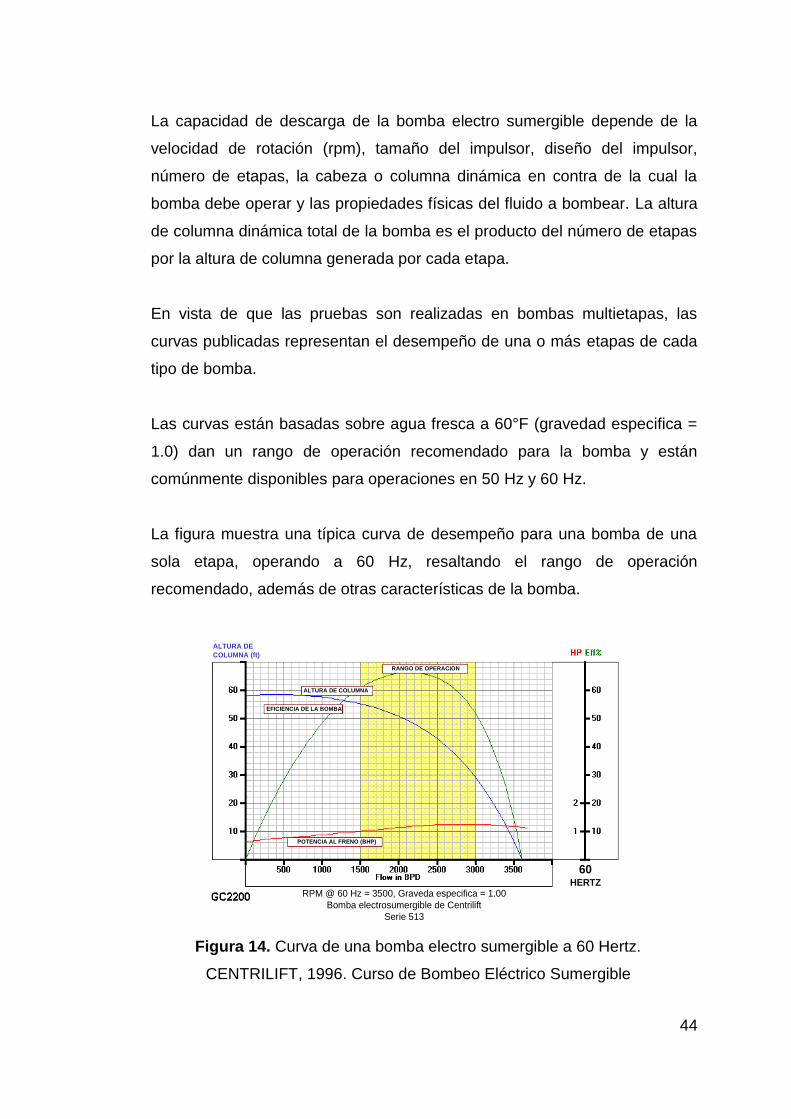
44
La capacidad de descarga de la bomba electro sumergible depende de la
velocidad de rotación (rpm), tamaño del impulsor, diseño del impulsor,
número de etapas, la cabeza o columna dinámica en contra de la cual la
bomba debe operar y las propiedades físicas del fluido a bombear. La altura
de columna dinámica total de la bomba es el producto del número de etapas
por la altura de columna generada por cada etapa.
En vista de que las pruebas son realizadas en bombas multietapas, las
curvas publicadas representan el desempeño de una o más etapas de cada
tipo de bomba.
Las curvas están basadas sobre agua fresca a 60°F (gravedad especifica =
1.0) dan un rango de operación recomendado para la bomba y están
comúnmente disponibles para operaciones en 50 Hz y 60 Hz.
La figura muestra una típica curva de desempeño para una bomba de una
sola etapa, operando a 60 Hz, resaltando el rango de operación
recomendado, además de otras características de la bomba.
Figura 14. Curva de una bomba electro sumergible a 60 Hertz.
CENTRILIFT, 1996. Curso de Bombeo Eléctrico Sumergible
RANGO DE OPERACION
EFICIENCIA DE LA BOMBA
ALTURA DE COLUMNA
POTENCIA AL FRENO (BHP)
ALTURA DE
COLUMNA (ft)
60HERTZ
RPM @ 60 Hz = 3500, Graveda especifica = 1.00
Bomba electrosumergible de Centrilift
Serie 513

45
3.4.1. LA CURVA DE ALTURA DE LA COLUMNA
Es trazada utilizando los datos de desempeño reales. Como puede
observarse, cuando la capacidad aumenta, la altura de columna total (o
presión) que la bomba es capaz de desarrollar se reduce. Generalmente, la
columna más alta que una bomba puede levantar, se desarrolla en un punto
en que no hay flujo a través de la bomba; esto es, cuando la válvula de
descarga está completamente cerrada.
3.4.2. LA CURVA DE POTENCIA AL FRENO (BHP)
Se traza con base en los datos de la prueba de desempeño real. Esta es la
potencia real requerida por la bomba centrífuga, tomando como base los
mismos factores constantes que se mencionaron anteriormente, para
entregar el requerimiento hidráulico.
3.4.3. RANGO DE OPERACIÓN RECOMENDADO
Localizado entre los flujos máximo y mínimo recomendados. Este es el
rango en el cual la bomba opera con mayor eficiencia. Si la bomba se opera
a la izquierda del rango de operación a una tasa de flujo menor, la bomba
puede sufrir desgaste por empuje descendente (downthrust). Si la bomba se
opera a la derecha del rango de operación a una tasa de flujo mayor, la
bomba puede sufrir desgaste por empuje ascendente (upthrust).
3.4.4. COLUMNA DINÁMICA TOTAL (TDH)
Es la altura total requerida para bombear la capacidad de fluido deseada.
Esta altura hace referencia a los pies de líquido bombeado y se obtiene con
la suma de la elevación neta del pozo, la pérdida de carga por fricción en la
tubería y la presión de descarga en la cabeza del pozo.

46
TDH = Hd + Ft + Pd
[Ec. 8]
Donde:
Hd: Es la distancia vertical en pies o metros, entre la cabeza del pozo y el
nivel estimado de producción
Ft: Es la columna requerida para vencer las perdidas por fricción en la
tubería.
Pd: Es la presión necesaria para superar la presión existente en la línea de
flujo.
Típicamente los fabricantes publican ecuaciones polinómicas representativas
de las curvas para la cabeza y caballos de fuerza de freno.
La representación numérica para la eficiencia es un valor calculado desde
esos polinomios para la cabeza y caballos de fuerza de freno a una tasa de
flujo dada. Usar las ecuaciones polinómicas es más preciso que usar las
curvas publicadas; por lo tanto, debería usarse para verificar la conformidad
de los puntos de prueba certificados.
3.4.5. CARTAS AMPERIMÉTRICAS
Una carta amperimétrica correctamente interpretada puede mostrar cambios
importantes en las condiciones de operación de los equipos.
Refleja las alteraciones y desbalances que se presentan en la interacción
entre el equipo de fondo y el pozo, y permite efectuar acciones correctivas
sin necesidad de sacar el equipo del pozo.
Para el análisis de cartas amperimétricas, asumiremos la operación de un
motor con una corriente de placa de 40 Amperios, cargado a 100% de su
capacidad. Para este equipo se han ajustado los valores de sobrecarga a 46

47
Amperios (115% del valor de placa) y el de baja carga a 32 Amperios (80%
de la corriente de operación).
Operación normal: esta es una carta de amperaje normal. Tiene el
pico de arranque seguido de una línea suave y simétrica a 40
amperios. Esto representa una condición ideal
Figura 15. Carta amperimétrica: normal
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Fluctuaciones de energía: picos periódicos que cruzan el trayecto
normal de operación. La causa más común, son cargas periódicas del
sistema que pueden ser consecuencia de descargas eléctricas
cayendo, fluctuaciones en la fuente primaria, o encendido de otros
elementos conectados a la misma fuente.

48
Figura 16. Carta amperimétrica: fluctuaciones de energía
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Bloqueo por gas: el gas comienza a entrar en la bomba causando un
bloqueo por gas. La variación en la gravedad especifica causa
oscilación del amperaje. Usualmente un episodio de bloqueo por gas
lleva a una parada por baja carga
Figura 17. Carta amperimétrica: bloqueo por gas
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción

49
Descarga de fluido de control: se está descargando fluido de
control. La alta gravedad de este fluido lleva a un incremento de
corriente mientras este es desplazado completamente. Se debe
ajustar el setting de sobrecarga por encima del 115 % mientras se
desplaza, y arrancar a una frecuencia menor de la de operación.
Figura 18. Carta amperimétrica: descarga de fluido de control
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Bajo nivel de fluido (Caso I): este es un caso donde la bomba opera
a una rata mayor que el aporte del pozo. Se reduce el nivel de fluido y
el gas comienza a separarse llegando a un bloqueo por gas. Las
posibles soluciones son: recircular fluido, profundizar la bomba,
rediseñar la bomba u operar el equipo a menor frecuencia.
Bajo nivel de fluido (Caso II): Este es un caso similar al anterior,
pero sin presencia de gas. Simplemente el nivel de fluido cae y se
presenta un descenso en la corriente de operación. El pozo no
alcanza a llenar el anular para cargar la bomba, y el intento de
arranque es fallido. El sistema es muy grande para la aplicación y
debe ser rediseñado o el pozo estimulado.

50
Figura 19. Carta amperimétrica: bajo nivel de fluido (Caso I)
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Figura 20. Carta amperimétrica: bajo nivel de fluido (Caso II)
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Exceso de ciclos de operación: en este caso se presentan varios
ciclos de operación de muy corta duración. Pueden ser causados por
el uso de un motor demasiado grande, taponamiento de la tubería,
válvulas cerradas o fugas en el tubing. Esta situación es muy
perjudicial para el equipo, y debe ser corregida inmediatamente.

51
Figura 21. Carta amperimétrica: exceso de ciclos de operación
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Gas libre en la bomba: El equipo está operando cerca de los niveles
de diseño, pero con presencia de gas dentro de la bomba, o en
ocasiones por la producción de fluidos emulsionados. Este fenómeno
representa también una disminución en la producción en superficie
Figura 22. Carta amperimétrica: gas libre en la bomba
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción

52
Apagado inmediato por baja carga: el fluido no tiene la suficiente
densidad o volumen para cargar el motor por encima del setting de
baja carga. Si se sabe que hay fluido disponible en el intake, es
posible corregir esta situación disminuyendo el valor del setting de
baja carga. Posibilidad de un eje roto
Figura 23. Carta amperimétrica: apagado inmediato por baja carga
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Falla en apagado por baja carga: la unidad bombea fluido al pozo
hasta el punto en que no hay fluido para producir, pero el equipo
continua funcionando sin carga hasta que se genera suficiente calor
para quemar el motor y se activa la alarma de sobrecarga. Este es un
caso donde la alarma de baja carga fue ajustada a un valor muy bajo.

53
Figura 24. Carta amperimétrica: falla en apagado por baja carga
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Sobre carga: Incremento en la gravedad del fluido o en la viscosidad:
formación de emulsiones, producción de arena. Problemas eléctricos
o mecánicos en el equipo de subsuelo o de superficie. Hasta que la
causa de la sobrecarga no haya sido determinada, no se debe
intentar arrancar el equipo.
Figura 25. Carta amperimétrica: sobre carga
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción

54
Manejo de sólidos: Partículas sólidas que ingresan a la bomba
(scala, arena, lodo, etc.) El pozo debe ser limpiado siempre para
remover los materiales extraños antes de arrancar la bomba. Es
recomendable inicialmente producir el pozo a una rata baja, para
crear el drawdown suavemente.
Figura 26. Carta amperimétrica: manejo de sólidos
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Excesivos intentos de arranque: cuando se presenta parada por
sobrecarga, no se debe intentar rearrancar hasta descubrir y dar
solución a las causas. Estos rearranques pueden llegar a destruir
piezas del equipo que aún están en buen estado.

55
Figura 27. Carta amperimétrica: excesivos intentos de arranque
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
Emulsiones o cargas en superficie: una posible causa es la
formación de emulsiones dentro de la bomba, que son desalojadas
periódicamente. Disminución en el voltaje de superficie debido a otros
equipos conectados a la misma línea, que se encuentran en un ciclo
de encendido y apagado o máximo y mínimo. Defectos en el sistema
de control del generador.
Figura 28. Carta amperimétrica: emulsiones o cargas en superfie
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción
56
3.5. PROCEDIMIENTO DE PRUEBAS
3.5.1. PUNTOS DE PRUEBAS
Las pruebas de desempeño deben ejecutarse en los siguientes cinco puntos
en la curva de desempeño publicada:
Prueba de flujo abierto
Tasa de flujo máxima recomendada
Flujo fijado (generalmente BEP)
Tasa de flujo mínima recomendada
Prueba apagado.
Los datos de los ítems deberían ser certificados.
Pruebas para esos puntos deben ser ejecutadas dentro de ± 2% del flujo
especificado. La cabeza y los caballos de fuerza del freno deberían
reportarse a la tasa de flujo real de la prueba antes que a la tasa de flujo
especificada.
3.5.2. EFICIENCIA
La eficiencia de la bomba debería ser calculada a la tasa de flujo del punto
de prueba.
3.5.3. CONSIDERACIONES ESPECIALES DE LAS PRUEBAS
Donde hay secciones de bombas en tándem, éstas deben ser
probadas como bombas individuales, y cada sección debería
evaluarse como una bomba independiente.
Cuando se prueben bombas con pocas etapas (generalmente menos
de 10), las pérdidas de succión deben ser consideradas.
57
El uso de agua fresca para la prueba puede dar como resultado
daños causados por congelamiento o corrosión durante el embarque
y almacenamiento.
3.5.4. ORIENTACIÓN DE LA PRUEBA
Las curvas de desempeño publicadas están basadas en pruebas verticales;
si se conduce una prueba horizontal pueden resultar diferencias en el
desempeño. La experiencia de la industria tiende a indicar que la cabeza no
cambia apreciablemente, pero los HP pueden incrementarse durante la
prueba horizontal, esta pequeña diferencia ya está controlada por el
operador, el equipamiento y la calibración.
3.5.5. FLUIDO DE PRUEBA
Las curvas de desempeño publicadas de las bombas están basadas en agua
fresca a 60°F, por lo que si se usan otros fluidos para realizar las pruebas;
éstas deberán ser corregidas para desempeño con agua fresca, ya que
existen relaciones para corregir desde un fluido de prueba a una prueba en
agua estándar.
3.5.6. TIEMPO DE CORRIDO DE LA PRUEBA
Las pruebas deberían establecerse en el rango de operación y el equipo
debe funcionar un tiempo suficiente largo para alcanzar lecturas de cabeza y
caballos de fuerza estables.
3.5.7. VARIACIONES DE VELOCIDAD
Las bombas pueden ser probadas con motores estándar, que son diferentes
a los usados en la práctica. Como resultado podemos tener algunas
variaciones de velocidad desde el valor nominal de 3500 rpm para potencia

58
de 60 Hz. Todas las pruebas deben ser corregidas a la velocidad nominal de
3500 rpm.
Las leyes de afinidad son usadas para corregir los valores fijados o para
otras frecuencias de la línea de potencia. Si se desean pruebas para otras
frecuencias que 60 Hz, el mismo procedimiento será aplicado con ajustes
proporcionales (ejemplo: usar 2916 rpm para 50Hz, con el mismo porcentaje
de tolerancias).
3.5.8. REQUERIMIENTO DE PRESIÓN DE SUCCIÓN
La presión de succión de la bomba debe estar sobre el mínimo requerido por
el fabricante.
Si existe cualquier limitación de succión o de descarga, esta deberá ser
especificada por el fabricante.
3.5.9. PRESIÓN DE INSTRUMENTACIÓN
Todas las mediciones están inevitablemente sujetas a imprecisiones. La
tabla provee la máxima tolerancia para los instrumentos usados durante la
prueba.
Tabla 03. Tolerancia para los instrumentos utilizados durante la prueba de
una bomba
API, 2000. Manual de Recomendaciones Prácticas para B.E.S.
CantidadLimite (en % de
plena escala)
Tasa de flujo ± 1.0%
Cabeza total ± 1.0%
Entrada de potencia electrica ± 2.0%
RPM + 0.5%

59
Los caballos de freno de la bomba deberían tener una precisión de ± 3.0%,
la eficiencia calculada de la bomba no debería exceder el ± 5.0%.
3.6. CERTIFICACIÓN DE PRUEBAS
3.6.1. LÍMITES
Los límites listados en la tabla deben aplicarse a las curvas de desempeño
publicadas por los manufactureros. Los límites se muestran gráficamente en
las figuras.
3.6.2. ACEPTACIÓN
El desempeño de cabeza de tasa de flujo de la bomba es aceptable si
la certificación de los puntos de prueba están dentro de la banda
permisible del desempeño de la tasa de flujo de cabeza.
El desempeño de los caballos de freno de la bomba es aceptable si
los caballos de fuerza de la bomba están dentro de la tolerancia de
los límites en los puntos de prueba certificados.
La eficiencia de la bomba calculada desde los resultados de las
pruebas es aceptable si es mayor que el límite especificado al flujo de
operación establecido.
Cuando las pruebas son conducidas usando instrumentos que reúnen
los criterios de precisión, y los valores observados durante las
pruebas reúnen los criterios de certificación de pruebas, la prueba de
la bomba es aceptable.

60
Tabla 04. Límites de pruebas aceptables de la bomba desde las curvas
publicadas
API, 2000. Manual de Recomendaciones Prácticas para B.E.S.
1 El rango de operación recomendado se define como el máximo rango de
operación publicado por el fabricante. Si este rango no está definido, use
± 20% del rango de operación.
Las pruebas de aceptación de bombas electro sumergibles van
acompañadas en conjunto con las pruebas de vibración correspondientes a
la Recomendación Práctica sobre Vibraciones en Sistemas de Bombas
Electro Sumergibles API 11 S8; que en síntesis expresa lo siguiente:
3.7. VIBRACIÓN EN SISTEMAS BES
La vibración se define como el movimiento de un cuerpo alrededor de un
punto de equilibrio. La vibración hacia los lados con respecto a la longitud
del equipo electro sumergible se denomina vibración lateral.
La vibración que tuerce el eje del equipo BES es una vibración torsional.
Puede ser el resultado de fuerzas causadas por desbalances, por fricción
entre partes o fricción del fluido. Estas fuerzas se encuentran en cualquier
máquina que tenga partes móviles. Los modos de vibración pueden ser
Curva Limite Donde es aplicable
Cabeza - tasa de flujo± 5% Cabeza
± 5% tasa de flujo
Sobre el rango de
operación
recomendado1
BHP - tasa de flujo ± 8% BHP
Sobre el rango de
operación
recomendado1
Eficiencia de la
bomba - tasa de flujo90% de eficiencia A flujo de operación
61
axiales, laterales (transversos), torsionales o combinaciones de los tres. La
vibración torsional se origina cuando se arranca y cuando se cambia la
velocidad.
Las altas velocidades de operación, como las que se dan con un controlador
de frecuencia variable, incrementarán la vibración debido al desbalance.
Las fuerzas debidas a un peso desbalanceado son proporcionales al
cuadrado de la frecuencia de operación. Los fabricantes toman
precauciones para mantener la concentricidad requerida y prevenir el
desbalance. También balancean las partes rodantes más pesadas, para
minimizar los efectos del desbalanceo en el equipo BES. El desbalance
excesivo, y la vibración resultante, provocarán el desgaste de cojinetes y el
anillo sellante de las etapas.
3.7.1. MEDICIONES DE VIBRACIÓN
3.7.1.1. Pruebas de proximidad
Deben ser montadas dentro de la carcasa de la maquinaria para medir el
desplazamiento relativo entre el eje y la carcasa, no son generalmente
usadas para medir vibraciones de BES debido a las dificultades de montaje.
3.7.1.2. Selección de la Localización de la Medición
Las mediciones de vibración deben ser tomadas en varias localizaciones a lo
largo de los componentes del sistema BES:
Bomba: Es de gran utilidad conducir la prueba de vibración con las
pruebas de aceptación. Como mínimo se deberían tomar mediciones
en el punto medio de la carcasa, en los topes de las localizaciones
radiales de la rolinera y en el fondo de las localizaciones radiales de la
62
rolinera. La tasa de flujo de la bomba debe ser mantenida constante.
Separador de gas / Succión: Debe hacerse una medición de
vibración en el punto medio de la carcasa, en la localización del tope
radial de la rolinera y en el fondo radial de la rolinera.
Protector o Sección de Sello: Al mínimo, las mediciones deberían
tomarse en el punto medio de la carcasa, en la localización del tope
radial de la rolinera y en el fondo radial de la localización de la
rolinera. (< 0,015 pulg./s)
Motor: Debería tomarse una medición en el punto medio de la
carcasa en la localización del tope radial de la rolinera y en el fondo
radial de la localización de la rolinera.
3.8. CONSIDERACIONES ELÉCTRICAS
Durante la operación del equipo BES pueden ocurrir diversos problemas que
pueden impactar negativamente en los costos y rentabilidad del proyecto
BES. Si es que no se identifican o no se realizan las medidas preventivas del
caso para evitar las fallas prematuras, y considerando la importancia y lo
gravitante de un equipo BES en operación, no se podría obtener el mejor
tiempo de vida útil.
3.8.1. SISTEMAS ELÉCTRICOS CON CORTOCIRCUITO
Durante el equipo BES en operación existen diferentes factores que influyen
en que se ocasione los cortocircuitos, tales como:
Operar un equipo con continuos paros por sobrecarga, debido a la
presencia de sólidos o atascamientos.
63
Operar un equipo con cables golpeados durante la introducción del
equipo BES. En este punto es muy importante notar que una cosa es
tomar mediciones de continuidad y aislamiento con el megaohmetro
sin haber energizado los cables y otra cosa es que el cable trabaje
golpeado y debilitado en su aislamiento y las condiciones de presión y
temperatura, es justamente en donde ocurren los cortocircuitos de los
cables.
Operar un equipo por excesivo consumo de corriente que puede
superar el amperaje nominal de los penetradores. Es muy importante
considerar este punto, ya que por ejemplo si el amperaje nominal del
motor es 120 amperios y el del penetrador es de 100 amperios, hay
que cuidar y setear los parámetros de control y de protección con
respecto al amperaje del penetrador y no del motor, generalmente no
toman en cuenta estas especificaciones de los penetradores y es allí
donde ocurren los problemas de cortocircuito.
Inadecuadas conexiones en los empalmes o cuando se instalan los
penetradores, pigtails. Si no hay una buena conexión de los
nicopress, lo que ocurre que cuando entra en operación el equipo
BES, justo en esa zona mal conectada y apretada se está generando
un arco y por consiguiente hay incremento de temperatura,
ocasionando recalentamiento y produciendo los cortocircuitos.
3.8.2. SISTEMAS ELÉCTRICOS CON EXCESIVO DESBALANCE DE
CORRIENTE
Los desbalances se deben a varios factores tales como:
Tipo de cable que se utiliza en la completación del pozo y la
profundidad que se instala. De acuerdo a la configuración de los
cables de potencia, el cable que genera menos desbalance es el tipo
redondo por su geometría helicoidal.
Defectuosa conexión eléctrica.

64
Condiciones de humedad en el momento de hacer conexiones o
hacer empalmes.
3.8.3. SISTEMA ELÉCTRICO OPERANDO CON UNA FASE A TIERRA
Se denomina también single phase. Las causas pueden ser diversas, entre
ellas conexiones inadecuadas, excesivos desbalances, presencia de
emulsiones, cables golpeados durante la introducción ocasionando
debilitamiento en el aislamiento, entre otros factores.
Existen casos en que un pozo puede seguir operando con una fase a tierra
pero por lo delicado de la situación se recomienda no parar el pozo ya que al
momento de re-arrancar el pozo las posibilidades son muy bajas.
En cuanto al monitoreo, es recomendable que se opere a una frecuencia
moderada, no a la máxima frecuencia y que se realice un ajuste apropiado y
optimizado de los parámetros de control, operación y protección en el
variador de frecuencia, ya que el hecho de operar a excesivas frecuencias
aumentará el recalentamiento que ya existe en las dos fases que quedan
operando y por consiguiente se acelerará la falla total del equipo BES.
3.8.4. EXCESIVO NÚMERO DE ARRANQUES
Dentro de la parte eléctrica debemos tener en cuenta que tanto el motor, los
cables y el resto del sistema eléctrico tienen rangos permisibles máximos de
corriente, voltaje y es justamente en los arranques en donde se presentan
corrientes puntuales máximas y si son repetitivas, esto puede ocasionar
daño en cualquier punto del sistema eléctrico, más aún se agrava el
problema cuando no se ha realizado un ajuste apropiado de los parámetros
de control y de protección en el variador de frecuencia.
El máximo número de arranques en un pozo debe ser de tres intentos y
65
entre arranque y arranque se debe dejar un tiempo prudencial de 20 o 30
minutos. Posterior a ello si el equipo no arranca se debe realizar un análisis
minucioso e integral del sistema entre todas las áreas técnicas involucradas
en la operación, para establecer bajo un procedimiento específico, las
alternativas finales de arranque.
3.8.5. INTERRUPCIONES ELÉCTRICAS
Los efectos son diversos, entre los que se pueden citar:
Pérdida paulatina del aceite dieléctrico en el protector durante las
paradas, esto se debe a la contracción y expansión térmica del fluido.
En pozos que producen sólidos (arena), éstos tienden a precipitarse
sobre las etapas de la bomba ocasionando problemas de arranque,
atascamientos de eje y en algunos casos roturas del eje.
Para pozos que trabajan con determinados cortes de agua, el motor
electrosumergible puede trabajar con el aceite dieléctrico
emulsionado. El fenómeno que se presenta es que el agua tiende a
precipitarse a la parte inferior del motor ocasionando contacto directo
con el sistema eléctrico (cortocircuito) y no volviendo a arrancar.
3.9. PRUEBAS DE CONTROL
3.9.1. REVISIÓN DE LAS CORRIENTES EN EL MOTOR
Corrientes desequilibradas en el motor causan una reducción del torque al
arranque del motor, desconexión por sobrecarga, vibración excesiva y un
rendimiento de trabajo inferior, que causa que el motor falle antes de tiempo.
Bajo condiciones de funcionamiento normal el desequilibrio entre las líneas
no debe exceder de 5% de desequilibrio.

66
Promedio de corriente = suma de las corrientes medidas en cada fase / 3
% de corriente desequilibrada = (máx. diferencia de amperaje promedio /
promedio de corrientes) x 100
3.9.2. REVISIÓN DE LAS RESISTENCIAS DE AISLAMIENTO DEL
MOTOR
Si el sistema BES cuenta con un sensor de fondo, la medición de la
resistencia de aislamiento con altos voltajes no debería realizarse ya que
podría dañar el sensor. Es conveniente corroborar con la compañía
prestadora de servicios si es o no factible realizar la prueba de aislamiento al
motor.
A continuación se muestra una tabla con los valores típicos de resistencia de
aislamiento medidos entre cada fase del motor y tierra.
VALOR
MEGAOHM CONDICIÓN DEL MOTOR Y LOS CONDUCTORES
0.5 – 1.0 El motor está en condiciones razonablemente buenas
0.02 – 0.5 El motor o los conductores pueden estar dañados
0.01 – 0.02
Un motor o cables dañados. El motor puede que
arranque pero probablemente no funcione por mucho
tiempo
0.0 – 0.01 Un motor que ha fallado, o con el aislamiento del
cable completamente destruido
Tabla 05. Valores de resistencia de aislamiento medidos entre fase – tierra
ACE INTERNACIONAL, 2013. Curso BES para Operadores de Producción

CAPÍTULO IV

67
CAPÍTULO IV
4. ANALISIS DE RESULTADOS
4.1. RECOMENDACIÓN PRÁCTICA PARA PRUEBAS DE
BOMBAS ELECTRO SUMERGIBLES
El manejo inapropiado de los componentes de un sistema de bombeo
eléctrico sumergible puede traer efectos catastróficos y normalmente muy
costosos. Los golpes y mal manejo de los equipos pueden causar
dobladuras en los alojamientos (housings), ejes, roturas de sellos, etc.
4.2. TRANSPORTE, MANEJO Y ALMACENAJE DEL
EQUIPO
Normalmente cada componente (bombas, motores, secciones de
sellado y separadores de gas), está en su propia caja metálica de
embalaje.
Los componentes deben estar adecuadamente soportados en puntos
a ¼ de la distancia de cada lado terminal de la caja de embalaje.
Figura 29. Ubicación de los soportes de caucho dentro de las cajas
REDA, 1995. Manual de bombeo eléctrico sumergible

68
Las cajas de embarque deben ser levantadas en dos puntos de izado
y de manera horizontal.
Las cajas de embalaje con el equipo estarán horizontales durante el
transporte.
Todas las cajas de embalaje del equipo deben ser marcadas por el
manufacturero con el objeto de indicar el lado final que debe ir hacia
el cabezal del pozo.
Al descargar las cajas; siempre es conveniente mantener un área de
5 a 6 pies libres alrededor del pozo como espacio de trabajo. No
permitir que los soportes de caucho, que vienen en el interior de las
cajas como seguridad, sean removidos de las mismas.
Figura 30. Ubicación del equipo dentro de las cajas
REDA, 1995. Manual de bombeo eléctrico sumergible
Las cajas y los carretes de cable deben ser movilizados y cargados
en el camión.
Las cajas no deben ser arrastradas, golpeadas o dejadas caer cuando
se las maneje.
Cuando se cargan las cajas, todas deben ser puestas en la
plataforma con el extremo pintado de rojo hacia la parte delantera del
camión. Se deben usar piezas de madera para separar las filas de
cajas, y asegurar las cajas como se indica en la figura a continuación:

69
Figura 31. Forma correcta de transportar equipos en la plataforma
REDA, 1995. Manual de bombeo eléctrico sumergible
4.2.1. CABLES
El método recomendado para levantar un carrete de cable, es insertar un
pedazo de tubo adecuado a través del centro de la bobina para que sirva
como un eje, el carrete puede ser levantado mediante una polea de potencia
con una barra espaciadora y un cable de izado o cadena de deslizamiento
amarrada a este eje.
Las cadenas nunca deben pasar sobre el tope del carrete o tocar el cable.
Figura 32. Utilización de la barra de equilibrio al movilizar un carrete con
grúa
REDA, 1995. Manual de bombeo eléctrico sumergible
Cuando movilice un carrete con montacargas, inserte las uñas entre los
rigidizadores del carrete. El carrete debe ser asentado suavemente sobre la
plataforma y se deben usar trozos de madera para evitar que ruede. El

70
carrete se debe asegurar pasando las cadenas por el interior del carrete,
entre los rigidizadores. Nunca se debe transportar un carrete acostado.
Únicamente debe ser levantado un carrete de cable a la vez.
Figura 33. Movilización del carrete con montacargas
REDA, 1995. Manual de bombeo eléctrico sumergible
Al carrete del cable nunca debe permitírsele que ruede entre objetos que
puedan romper o causar daños al cable o al carrete.
Debe haber un espaciamiento mínimo de 4 pulgadas entre la última capa del
cable y la brida del carrete a fin de proteger al cable de daños.
4.2.2. CABLES TERMINALES DE EXTENSIÓN DEL MOTOR (PLANOS)
Los cables de extensión de los terminales del motor deben ser embarcados
en forma separada en una caja junto al carrete para asegurar su protección
física. Cada terminal del cable de extensión debe ser sellado.
4.3. EQUIPO DE SUPERFICIE Y MISCELÁNEOS
4.3.1. TRANSFORMADORES
Los transformadores deben ser provistos de orejas de izado para
carga y descarga.

71
Los transformadores deben ser izados con cables o barras de izado.
Tapas cobertoras empernadas, deben ser localizadas en el sitio
cuando se usan cables y una barra de despliegue debe usarse para
mantener al transformador en posición vertical.
Donde grúas o equipo de izado no está disponible, los
transformadores deben ser arrastrados mediante el movimiento de
rodillos colocados sobre los patines con gatos hidráulicos; debe
cuidarse el no virar los transformadores.
4.3.2. PANELES DE CONTROL DEL MOTOR
Al momento del transporte de los controladores del motor se debe
prevenir el movimiento, cortaduras o vibración excesiva,
asegurándolos a la cama del camión.
Nunca debe colocarse nada sobre la tapa del controlador del motor.
El interior de los paneles de control deben permanecer limpios y
secos.
4.3.3. EQUIPAMIENTO Y ACCESORIOS
Los accesorios deben ser empacados en cajas y etiquetados para su
identificación.
Si se piensa almacenar el equipo de manera prolongada es necesario
el uso de absorbentes de humedad o inhibidores de corrosión o
ambos.
4.4. PRUEBAS DE RENDIMIENTO
Estas pruebas se realizan en los talleres de servicio a los equipos BES,
equipos que llegan del campo para una inspección preliminar antes de su
desarme y reparación. Si la inspección preliminar no refleja ningún daño

72
evidente y el desgaste no es excesivo, entonces es probado en el banco de
pruebas.
Con las curvas obtenidas se compara con las curvas tipo del mismo equipo
cuando nuevo y se puede determinar si la bomba puede ser re-usada sin
necesidad de someterla a una reparación mayor; en muchos casos una
mínima reparación sin desarmar la bomba es suficiente.
4.5. ANÁLISIS DE FALLAS DEL EQUIPO BES
El análisis de la falla del equipo BES, comienza desde el momento en que se
recibe el reporte de que la unidad ha dejado de operar. Es recomendable
que un técnico de campo verifique la BES e identifique el problema.
Cuando el problema es en superficie, el técnico de campo restablece las
condiciones de operación (alarmas, válvulas cerradas, fusibles quemados,
seteo inapropiado) y pone a la unidad en servicio y lo reporta al
Departamento de Ingeniería de la compañía operadora. Si hay un problema
en el fondo (cortocircuito, bombas atascadas, etc.) el técnico reporta el
problema y realiza recomendaciones al Departamento de Ingeniería y se
determinan las acciones a tomar de acuerdo a un análisis particular del
pozo.
En algunos casos la unidad puede entrar en operación en cortísimo tiempo.
Sin embargo, habrá ocasiones en que el problema no podrá ser resuelto tan
pronto y será necesario sacar la BES del pozo, ya sea porque existe un daño
en el fondo, por falta de aporte del pozo, para redimensionar el equipo o
para hacer algún trabajo de reacondicionamiento en el pozo.
4.5.1. EVALUACIÓN DE LA INFORMACIÓN DE OPERACIÓN DEL
EQUIPO
73
Después de ser recuperado el equipo BES del pozo, el análisis de las fallas
es muy importante, pues a través de este análisis se puede llegar a
determinar la o las causas de la falla y por tanto de los componentes del
sistema que están causando problemas. También es fundamental,
determinar las condiciones del equipo cuando este estuvo operando antes
de la falla. Es necesario examinar la información de operación. Por ejemplo:
las cartas amperimétricas, las pruebas de producción, la presión y
temperatura de fondo, registros de nivel de fluido, los reportes de instalación
y sacada del equipo del pozo y cualquier otra información que puede haber
afectado al comportamiento del equipo.
Identificar los puntos débiles permite al proveedor (fabricante) mejorar la
calidad de las partes defectuosas que causan problemas al cliente y corregir
procedimientos, seleccionar equipos de acuerdo a las condiciones
específicas del pozo y tomar las medidas correctivas necesarias, las cuales
reflejarán en una operación eficiente y por tanto mayor tiempo de operación
de BES.
Si de la inspección preliminar refleja daño evidente, por ejemplo, un motor
cortocircuitado, eje roto, etc.; hay casos en que la causa de la falla puede no
ser muy evidente y es difícil determinarla.
4.5.2. INSPECCIÓN, PRUEBAS Y DESARMADO DEL EQUIPO
La revisión y análisis de bases de datos de operación, reportes de
instalación, recuperación e inspección y desarme de los equipos de
instalaciones anteriores, en algunos casos determinan una decisión de sacar
el equipo que está aún operando.
Una vez que el equipo ha sido recuperado, es necesario enviarlo a los
talleres de servicio para la inspección. Esta debe ser lo más pronto posible
después de la recuperación del equipo, con el fin de que se pueda obtener la

74
mayor información, pues el equipo estará en las condiciones en que se
recuperó y además porque permitirá hacer recomendaciones oportunas para
la siguiente completación a instalarse en el pozo; así como equipo resistente
a la abrasión, resistente a altas temperaturas, etc.
Es deseable que uno o más representantes del cliente estén presentes
durante todo el proceso de mayor interés.
Las operaciones a realizarse en los talleres de servicio son:
Inspección preliminar,
Pruebas de los componentes (en banco de pruebas si es aplicable) y
Desarmado de los componentes
El objetivo es determinar las condiciones generales de los componentes, si
tienen daños evidentes como ejes rotos, agujeros en los alojamientos
(housings), depósitos de materiales externos, etc. y evaluar la posibilidad de
probarlos en un banco de pruebas o desmantelarlos directamente.
4.5.3. INSPECCIÓN EXTERNA DE LOS COMPONENTES
Dependiendo de la naturaleza de la falla, o si la causa de la falla no es
evidente, podría ser necesario desmantelar todos los componentes de la
BES para determinar la causa y re-usar uno o más componentes.
Se registran los datos de placa de cada uno de los componentes y sus
condiciones externas.
Se inspecciona minuciosamente cada componente externo: los housings,
bases y cabezas para evaluar especialmente la presencia de uno de los
siguientes tres problemas:

75
4.5.3.1. Presencia de escala
El espesor de la escala formada.
El área cubierta: que porcentaje de la superficie externa total o de
dónde a dónde.
Taponamiento de los orificios de entrada del "intake", total o parcial,
% taponado.
Es la escala soluble en ácido.
4.5.3.2. Corrosión – erosión
Tamaño y profundidad de las picaduras. Verificación de las picaduras
para saber si alguna atraviesa completamente el housing.
Área corroída. Qué porcentaje de la superficie externa tiene
picaduras. Distribuidas o localizadas, y en dónde.
Se ven muestras evidentes de erosión y/o abrasivos en los orificios
del intake y/o en las cabezas de las bombas.
4.5.3.3. Daños mecánicos
Huecos en el housing, base o cabeza.
Housing doblado.
Rozamiento o presencia de metal removido por fricción entre el
equipo y el casing.
Presencia de metal fundido en los housings, debido a cortocircuito en
el cable.
Hendiduras o huellas de la armadura del cable por contacto con el
casing.
Se deben inspeccionar los extremos estriados de los ejes y sus respectivos
couplings y la condición de las placas de seguridad.
76
En la inspección de los anillos “O” rings, se debe chequear si están picados,
cortados, duros o frágiles, recalentados, aplastados, quemados y si tienen
muestras de contaminación con fluido del pozo.
4.6. APLICACIÓN
Pozo: Atacapi 12 Campo: Libertador
Arena: “U”- Inferior API: 32
Tiempo en operación: 390 días Retirado: 17 Enero 2006.
Instalado: 5 diciembre 2005 Razón: Pérdida de producción.
La instalación del equipo se realiza con todos los procedimientos para el
arranque de acuerdo a la recomendación API 11 S1; el cable tiene capilar
para inyección de químico pero lamentablemente no es utilizado. El pozo
queda operando con 2049 Voltaje promedio, 25 Amperios, Presión de
Fondo=2150psi, Ti=231°F, Tm=251°F. Producción estabilizada: 631 BFPD,
64% BSW.
4.6.1. PROBLEMAS
Incrementos de “PIP” debido a la presencia de gas que bloquea a la
bomba.
También incremento de la temperatura del motor “Tm”, ya que la
bomba al quedar sin fluido y cavitando, empieza a sobrecalentarse,
dispersando su temperatura al resto de componentes.
4.6.2. REPORTE DE DESARME E INSPECCIÓN
4.6.2.1. Bombas
Housing

77
Exteriormente en buen estado.
Eje
En la bomba inferior, eje con desgaste severo debido al desgaste de
las 5 etapas inferiores causada por el manejo de los residuos
metálicos provenientes seguramente del Shaft-Tube del separador.
Desgaste en área de empuje descendente, Down thrust (DT).
Los impulsores y difusores presentan desgaste leve por DT. Las
arandelas de downthrust no pudieron ser identificadas. Las 5 etapas
inferiores con severo desgaste en esta área, causado por los residuos
metálicos provenientes del separador de gas.
Desgaste en área de empuje ascendente Upthrust (UT).
Impulsores y difusores presentan leve desgaste por UT. No se
encontraron las arandelas de UT.
Desgaste Radial. En general presenta desgaste radial moderado en
los Hub y en los faldones de los impulsores. Las dos etapas inferiores
con el Hub desprendido.
Sólidos en la bomba
Gran cantidad de pedazos de metal provenientes probablemente del
separador de gas.
Figura 34. Pedazos metálicos del separador de gas
Schlumberger, departamento de Artificial Lift

78
4.6.2.2. Intake – Separador
Se encontró con severo desgaste:
El Shaft-Tube fuera de su alojamiento en la base y consumido en un
80%.
Impeler pick up severamente desgastado.
Los cojinetes ARZ superior e inferior no se pudieron identificar.
Los fragmentos de metal del separador en la bomba desgastaron las 5
etapas inferiores.
Figura 35. Shaft-Tube suelto y consumido. Eje severamente desgastado.
Schlumberger, departamento de Artificial Lift
4.6.2.3. Protector
Protector superior
Cámaras de Laberinto: Primera: con fluido de pozo
Segunda: con aceite trabajando
Tercera: con aceite trabajando
Condición Mecánica:

79
Cojinete de empuje axial: la zapata de Downthrust sin desgaste. Leve
desgaste en la zapata de Upthrust. Todos los sellos mecánicos sin
fugas.
Protector Inferior
Cámaras:
Primera: Exterior de la bolsa: con aceite trabajando. Interior: aceite
limpio.
Segunda: Exterior de la bolsa: con aceite trabajando. Interior: aceite
limpio.
Tercera de laberinto: con aceite limpio.
Condición Mecánica:
Cojinete de empuje axial: sin desgaste.
Todos los sellos mecánicos sin fugas.
4.6.2.4. Motor
Condición Mecánica:
Cojinete Axial: en buenas condiciones, sin desgaste.
Pruebas:
Aislamiento fase a tierra: C: 2000MO; A>2000MO; B>2000MO
Resistencia fase a fase: A-B = 2,20; B-C = 2,20; C-A = 2,20
Rigidez dieléctrica aceite: 15 KV
Hermeticidad a 10psi: no hay fugas en base y cabeza y Pothead y
FillValve.
80
Al motor se le realizará lavado (flushing), prueba dinámica y eléctrica
para reconfirmar su buen estado mecánico y listo para una nueva
aplicación.
4.6.3. ANÁLISIS DE FALLA
Localización de la falla:
Sección: Intake – Separador RF.
Parte: Shaft-Tube, tubo protector del eje.
Secuencia de la falla:
El Shaft-Tube se desajusta de su alojamiento en la base del
separador, resultado de la alta temperatura por cavitación de la
bomba.
El shaft-Tube gira y roza contra el eje del separador y empieza a
desgastarse y a desintegrarse.
Los residuos del Shaft-Tube suben a la bomba y causan desgaste y
ruptura de las etapas inferiores de la bomba.
Con los impulsores inferiores desgastados, la bomba pierde gran
parte de su capacidad de levantamiento.
Causa Raíz:
Según la información recopilada del campo, periódicamente se
evacuaba gas por el casing, la acumulación de gas en el anular es
originado por la liberación de gas al operar el sistema BES cerca al
punto de burbuja (1115 psi) entre 1123 psi @ 1226 psi, esto ocasiona
bloqueo de gas en la succión de la bomba permitiendo que las
mismas giren sin fluido causando el incremento de temperatura en las
bombas, temperatura que es transmitida al resto del equipo.

81
4.6.4. DATOS ADICIONALES
La bomba es armada y llevada al banco de pruebas.
Figura 36. Curva de Rendimiento Bomba REDA – Pozo Atacapi 12D
Petroamazonas EP, Departamento de Producción
La curva de eficiencia obtenida sale del rango permisible a partir del primer
punto. Lo que no es grave ya que tenemos una mejor eficiencia. Además
tenemos en la curva de cabeza una desviación del rango permisible en el
segundo y tercer punto que no es significativa.
4.7. POZO AGUARICO 6
4.7.1. PROBLEMAS MECÁNICOS
Etapas de la bomba con excesivo desgaste por fricción de los componentes
internos (impulsor – difusor) y/o otros componentes del equipo de fondo, que
generan picos altos de amperaje.

82
4.7.2. CAUSAS
Comúnmente por mal dimensionamiento, falta de previsión en la evaluación
de los datos del pozo, características del fluido y un pobre seguimiento en la
supervisión del equipo.
4.7.3. CAUSAS ELÉCTRICAS
Inadecuado voltaje de alimentación. Cuando el operador no selecciona o
supervisa el voltaje adecuado a la salida del transformador, o este no está
proporcionando el voltaje correspondiente al TAP seleccionado. Si el motor
recibe un voltaje mayor, entonces incrementa el consumo de amperaje.
4.8. EQUIPO DE FONDO A TIERRA
Se menciona que un equipo está “a tierra”, cuando las lecturas eléctricas
tanto fase-fase como fase a tierra, registrado en superficie, nos dan valores
fuera de los rangos permisibles. Estas lecturas nos muestran un desbalance
mayor en las lecturas fase-fase y al equipo no se puede ni debe intentar re-
arrancar.
Por ejemplo:
Lecturas Fase-Tierra: “0” Mega ohmios (tomada con el Megger).
Lectura Fase-Fase: Desbalanceada (tomada con multímetro).
Los valores mencionados arriba nos indican que el equipo de fondo tiene
problemas eléctricos graves y que ya no re-arrancará, por consiguiente es
necesario remplazar el equipo para poner nuevamente a producir el pozo.
Los problemas se pueden presentar por:

83
Motor a tierra, por corto circuito.
Cable de potencia a tierra, por cortocircuito.
Cable de extensión a tierra, por cortocircuito.
Empalmes a tierra, por cortocircuito.
Conectores eléctricos de los motores cortocircuitados
El Pod Head (enchufe) del motor cortocircuitado
Conectores eléctricos de superficie a tierra, por cortocircuito
4.8.1. PROBLEMAS DETECTADOS POR EL SENSOR DE FONDO
El sensor del equipo BES detecta varios parámetros importantes, que sirven
al operador para determinar el comportamiento del equipo en el pozo.
Además ofrece información para determinar problemas que inducirían a
fallas de la BES
4.8.2. VIBRACIÓN ALTA
Este problema posiblemente se deba a la presencia de sólidos, desgaste de
la bomba, desgaste de los bujes internos del motor, sello, separador de gas.
Si las lecturas de vibración se han incrementado sobrepasando los valores
permisibles de trabajo entonces se debe tener mucho cuidado con el equipo
de fondo. Es importante considerar el tiempo de operación del equipo,
análisis de fluidos del pozo, frecuencia de operación, longitud del equipo,
etc.
Generalmente se detecta el problema, pero muchas veces no es posible
detener el equipo porque está operando, pero es un aviso para estar
preparados para cambiar por un nuevo equipo cuando el equipo falle.
4.8.3. TEMPERATURA ALTA DEL MOTOR
El factor más importante que se debe controlar es la temperatura de
84
operación del motor, si esta se eleva sobrepasando los valores permisibles
de operación, se debe corregir el problema o apagar el equipo. Si el
problema no se corrige es preferible remover el equipo antes que éste
presente una falla mayor.
4.8.4. AISLAMIENTO BAJO
El sensor de fondo ofrece valores de la corriente de fuga, por lo que se
puede evaluar el estado de aislamiento de todos los componentes del
circuito eléctrico (cable, motor, cable de extensión, empalmes, etc.)
También es un aviso para estar preparados para remplazar con un equipo
nuevo, en caso de una falla.

85
EQUIPOS ESP FUERA DE SERVICIO
MARCA POZO FECHA
INSTALACION
FECHA
DAÑO
FECHA
RECUPERACION
DIAS
DURACION
ETAPAS
BOMBA HP OBSERVACION
REDA SSF 01 11-feb-03 21-mar-07 31-mar-07 1499 108 330 CABLE DE SUBSUELO CON BAJA
RESISTENCIA
REDA SSF 01 04-abr-07 09-abr-09 12-abr-09 738 96 330 BAJA RESISTENCIA BAJO
SUPERFICIE
REDA SSF 01 22-abr-09 14-ago-09 17-ago-09 114 187 450 TUBERIA ROTA
CENT SSF 106D 15-sep-06 02-sep-07 05-sep-07 352 374 152 MOTOR CON FASE A TIERRA
CENT SSF 106D 20-sep-07 11-mar-08 14-mar-08 173 332 228 TUBING COMUNICACION CON CSG
CENT SSF 106D 18-mar-08 13-may-08 18-may-08 56 332 152 TUBING COMUNICACION CON CSG
CENT SSF 106D 23-may-08 16-jul-08 25-jul-08 54 332 152 TUBING COMUNICACION CON CSG
CENT SSF 106D 15-sep-08 24-may-09 26-may-09 251 123 165 BOMBA ATASCADA
CENT SSF 106D 11-jun-09 06-sep-09 06-sep-09 87 293 152 TUBING COMUNICACION CON CSG
REDA SSF 110D 15-jul-06 04-jun-07 09-jun-07 324 314 100 MLE FASE A TIERRA
REDA SSF 110D 12-jun-07 11-jul-07 18-jul-07 29 314 100 BSW ALTO
REDA SSF 110D 06-ago-07 24-oct-07 27-oct-07 79 387 125 TUBING COMUNICACION CON CSG
REDA SSF 110D 01-nov-07 26-feb-08 28-feb-08 117 392 125 MOTOR CON BAJO AISLAMIENTO
REDA SSF 110D 05-mar-08 03-ago-08 10-ago-08 151 387 125 TUBERIA ROTA
REDA SSF 56 05-dic-05 21-jun-08 24-jun-08 929 398 216 MOTOR CON BAJO AISLAMIENTO
REDA SSF 56 26-jun-08 27-feb-09 03-mar-09 246 398 225 BAJA RESISTENCIA BAJO SUPERFICIE
REDA SSF 56 06-mar-09 23-ago-09 23-ago-09 170 407 225 BAJO SUPERFICIE FASE A TIERRA

86
Continua
MARCA POZO FECHA
INSTALACION
FECHA
DAÑO
FECHA
RECUPERACION
DIAS
DURACION
ETAPAS
BOMBA HP OBSERVACIONES
REDA SSF 71 08-oct-02 18-mar-07 22-mar-07 1622 202 330 TUBING COMUNICACION CON CSG
REDA SSF 71 25-mar-07 08-ago-07 13-ago-07 136 220 450 TUBERIA ROTA
REDA SSF 71 25-ago-07 04-may-08 06-may-08 253 237 450 CABLE DE SUBSUELO CON
CORTOCIRCUITO
REDA SSF 71 11-may-08 01-jun-08 07-jun-08 21 256 660 CABLE DE SUBSUELO BAJA
RESISTENCIA
REDA SSF 71 11-jun-08 31-dic-08 05-ene-09 203 256 660 TUBERIA ROTA
REDA SSF 73 06-may-05 07-nov-07 09-nov-07 915 154 330 CABLE DE SUBSUELO FASE A TIERRA
REDA SSF 73 12-nov-07 26-ago-08 28-ago-08 288 314 330 BOMBA REMORDIDA CON ESCALA
CENT SSF 92 10-may-05 02-sep-07 04-sep-07 845 117 330 MLE CON CORTOCIRCUITO
CENT SSF 92 12-sep-07 10-ene-08 18-ene-08 120 117 380 TUBERIA ROTA
CENT SSF 92 30-ene-08 09-mar-08 11-mar-08 39 138 380 TUBING COMUNICACION CON CSG
CENT SSF 92 18-mar-08 26-may-08 01-jun-08 69 166 418 TUBERIA ROTA
REDA SSF 94 30-nov-06 11-abr-07 15-abr-07 132 195 450 MOTOR CON CORROSION
REDA SSF 94 18-abr-07 20-jul-07 23-jul-07 93 209 450 TUBING COMUNICACION CON CSG
REDA SSF 94 27-jul-07 05-ene-08 08-ene-08 162 217 450 TUBING COMUNICACION CON CSG
Tabla 06. Equipos ESP fuera de servicio
Petroamazonas EP, Departamento de Producción

87
4.9. ANÁLISIS DE HISTORIALES DE FALLAS DE EQUIPOS
ESP
4.9.1. ATASCAMIENTO EN BOMBAS POR CARBONATOS DE CALCIO O
SULFATO DE BARIO (ESCALA)
4.9.1.1. Shushufindi 106D
Pozo: SHUSHUFINDI 106D
Fecha de Instalación: 12 Septiembre 2006
Fecha de daño: 02 Septiembre 2007
Días Operación: 352 días
Razón: Bombas atascadas (escala)
DATOS DEL POZO
Formación Productora: U INFERIOR BFPD: 1150
API: 29.9 PIP: 1418 psi
Water Cut: 1% Tubing: 3 1/2"
GOR: 328 scf/bbl Casing: 9 5/8" + 7"
Punto de burbuja: 1118 psia WHP: 170 psi
Sólidos: Scala BHT: 219 °F
Frecuencia: 60 Hz Viscosidad: 2.219 Cp
Pr: 2838 psi Perforaciones: 9330 ft
PI: 0.846 BFPD/psi Prof. Asentamiento: 9000 ft
Tabla 07. Datos del Pozo Shushufindi 106D
Petroamazonas EP, Departamento de Producción
El equipo BES fue instalado el 12 de septiembre de 2006, para una
producción de 1150 BFPD. El comportamiento del pozo en producción no
fue el esperado, puesto que empezó a declinar hasta registrarse 600 BFPD

88
el 27 de Agosto del 2007.
Mediante reporte de los técnicos, se recomendó analizar las características
del fluido, a fin de que se inyecte algún tipo de químico, que evite la
formación de escala.
4.9.1.2. Limpiezas ácidas y estimulación
Este pozo tuvo serios problemas para arrancar, por el atascamiento en las
bombas, razón por la que en varias ocasiones se realizan limpiezas ácidas y
estimulación con ácido clorhídrico al 15% y solventes a la arena U Inferior.
A pesar de los trabajos, el equipo de fondo continuó con síntomas de
atascamiento severo. Posteriormente, se evidenció que el pozo estaba
trabajando con una fase a tierra, como consecuencia de la degradación en el
aislamiento eléctrico, por la serie de arranques en condiciones de
atascamiento, hasta que el equipo BES luego de 352 días de operación se
detuvo definitivamente por bajo aislamiento y por atascamiento en bombas
por la escala.
Se realizó el pulling del equipo BES que sale en las siguientes condiciones:
El MLE (Motor Lead Extension - Cable Eléctrico de Extensión) con
perforaciones en la armadura exponiendo el cobre al exterior,
probablemente provocado por golpes en la bajada del equipo o por el
deterioro a lo largo de la armadura, debido a la utilización de químicos
en el pozo (HCl 15%).
El giro y extensión del eje del motor son normales, eléctricamente
éste se encuentra con bajo aislamiento a tierra y balanceado entre
fases.
En brida del sello, se encuentra presencia de escala y también a lo
largo del MLE.
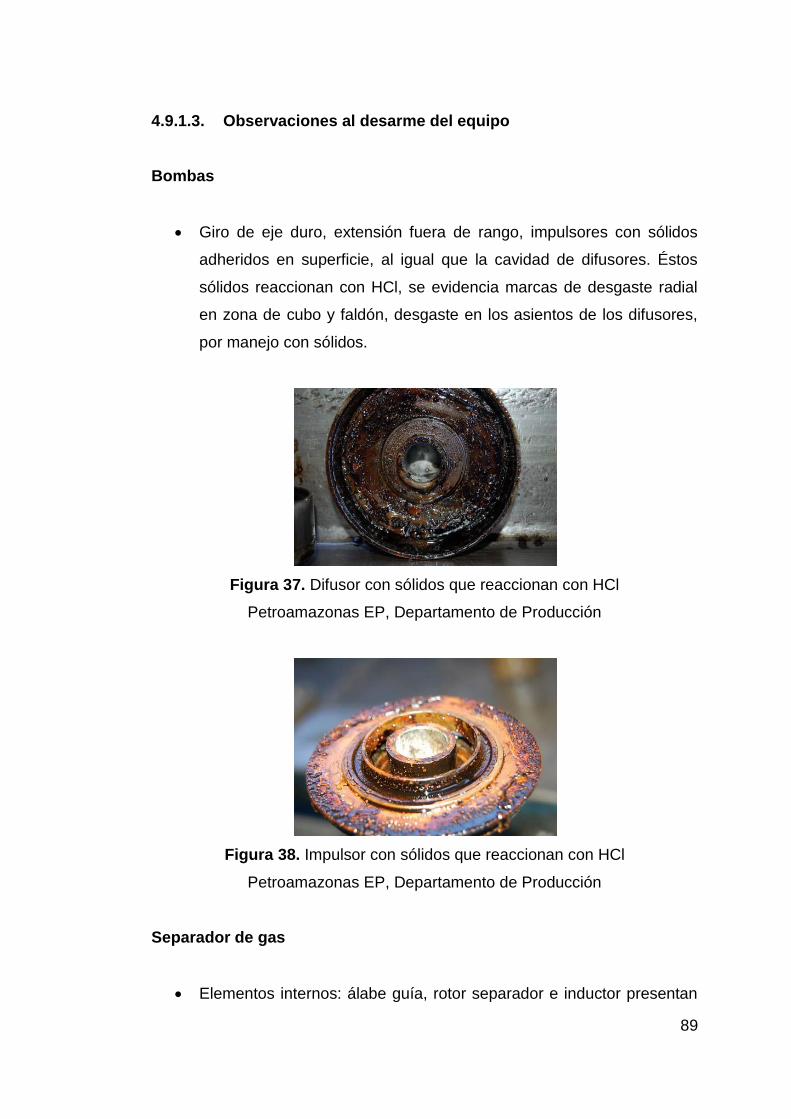
89
4.9.1.3. Observaciones al desarme del equipo
Bombas
Giro de eje duro, extensión fuera de rango, impulsores con sólidos
adheridos en superficie, al igual que la cavidad de difusores. Éstos
sólidos reaccionan con HCl, se evidencia marcas de desgaste radial
en zona de cubo y faldón, desgaste en los asientos de los difusores,
por manejo con sólidos.
Figura 37. Difusor con sólidos que reaccionan con HCl
Petroamazonas EP, Departamento de Producción
Figura 38. Impulsor con sólidos que reaccionan con HCl
Petroamazonas EP, Departamento de Producción
Separador de gas
Elementos internos: álabe guía, rotor separador e inductor presentan

90
sólidos adheridos que reaccionan con HCl, se evidencia desgaste
radial en bujes.
Figura 39. Separador de gas con presencia de sólidos en su interior
Petroamazonas EP, Departamento de Producción
Figura 40. Rotor separador con sólidos adheridos
Petroamazonas EP, Departamento de Producción
Figura 41. Inductor con sólidos adheridos
Petroamazonas EP, Departamento de Producción

91
Sellos
Todas las cámaras llenas con fluido de pozo, fuelles de sellos
mecánicos expandidos y quebradizos. Cojinetes con severas marcas
de desgaste y calentamiento. Presenta marcas de desgaste radial en
sector de bujes guías, así como gran cantidad de sólidos en sector de
cámara intercambiadora de calor (carbonatos).
Figura 42. Bolsa llena con fluido del pozo
Petroamazonas EP, Departamento de Producción
Figura 43. Zapata con severo desgaste radial
Petroamazonas EP, Departamento de Producción

92
Figura 44. Ejes con marcas de desgaste en sector de bujes guías y sello
superior e inferior
Petroamazonas EP, Departamento de Producción
Figura 45. Sólidos encontrados en cámara intercambiadora
Petroamazonas EP, Departamento de Producción
Motor
Se observa sólidos adheridos al housing que reaccionan con HCl,
eléctricamente en buen estado.
Figura 46. Motor: zapatas con marcas de desgaste y calentamiento
Petroamazonas EP, Departamento de Producción

93
Figura 47. Base y cabeza de motor con aceite contaminado
Petroamazonas EP, Departamento de Producción
Sensor
Externamente sin pittings de corrosión ni marcas de arrastre,
eléctricamente en buen estado.
4.9.1.4. Reporte de servicio técnico
El informe indica que es una falla indirecta, no atribuible al equipo en sí, que
se resume en lo siguiente:
Componente que falló
Subcomponente que falló
Causa general de la falla
Causa especifica de la falla
MLE Aislamiento Mecánico /
trabajos en el pozo
Golpe / tratamiento
quimico
Tabla 08. Reporte de Servicio Técnico
Petroamazonas EP, Departamento de Producción
4.9.2. ANÁLISIS DE FALLA POZO SSFD 106D
Después de 352 días de operaciones el equipo BES presentó problemas por
bajo aislamiento, condición que se generó debido a las características a las
cuales las bombas se encontraban operando, presencia de sólidos, mismos
que atascaban el giro de las bombas, a pesar de los tratamientos químicos y

94
limpieza en el pozo, los sólidos encontrados como evidencia del
desensamble corroboran el atascamiento de las mismas.
El motor se encontró eléctrica y mecánicamente en mal estado,
suscitándose los problemas de bajo aislamiento en el MLE (Motor Lead
Extension – Cable Eléctrico de Extensión), el cual según reporte de pulling,
presenta un daño mecánico (golpe) que pudo haber sufrido cuando se bajó
el equipo, además del tratamiento químico que se inyectó al pozo. Estas
condiciones afectaron la armadura del cable, permitiendo la migración del
fluido de pozo hacia el EPDM (Etileno Propileno Dienemetileno – Aislamiento
del Conductor) y la subsiguiente falla del MLE por bajo aislamiento.
En los anexos de este trabajo de investigación se adjuntan los reportes de
servicios realizados en dicho pozo.
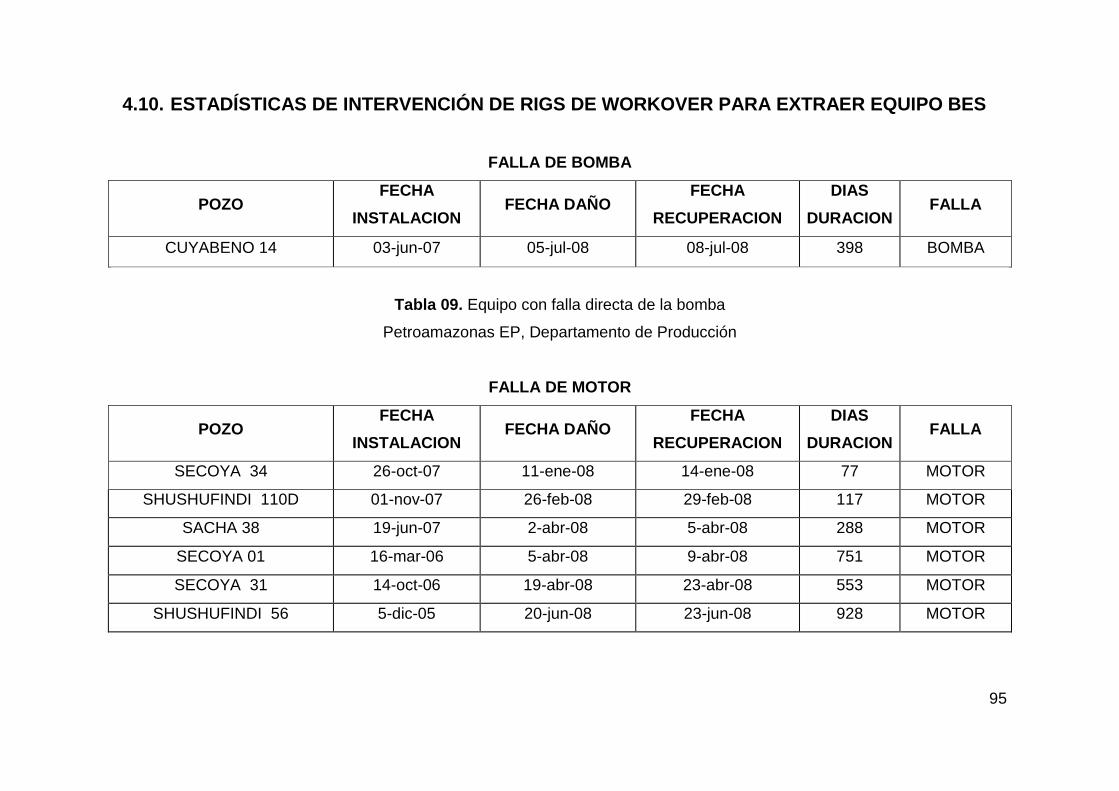
95
4.10. ESTADÍSTICAS DE INTERVENCIÓN DE RIGS DE WORKOVER PARA EXTRAER EQUIPO BES
FALLA DE BOMBA
POZO FECHA
INSTALACION FECHA DAÑO
FECHA
RECUPERACION
DIAS
DURACION FALLA
CUYABENO 14 03-jun-07 05-jul-08 08-jul-08 398 BOMBA
Tabla 09. Equipo con falla directa de la bomba
Petroamazonas EP, Departamento de Producción
FALLA DE MOTOR
POZO FECHA
INSTALACION FECHA DAÑO
FECHA
RECUPERACION
DIAS
DURACION FALLA
SECOYA 34 26-oct-07 11-ene-08 14-ene-08 77 MOTOR
SHUSHUFINDI 110D 01-nov-07 26-feb-08 29-feb-08 117 MOTOR
SACHA 38 19-jun-07 2-abr-08 5-abr-08 288 MOTOR
SECOYA 01 16-mar-06 5-abr-08 9-abr-08 751 MOTOR
SECOYA 31 14-oct-06 19-abr-08 23-abr-08 553 MOTOR
SHUSHUFINDI 56 5-dic-05 20-jun-08 23-jun-08 928 MOTOR

96
Continua
POZO FECHA
INSTALACION FECHA DAÑO
FECHA
RECUPERACION
DIAS
DURACION FALLA
CONONACO 25 20-mar-04 17-jul-08 30-jul-08 1580 MOTOR
CONONACO 24 03-oct-05 6-Aug-08 13-Aug-08 1038 MOTOR
SACHA 175 H 04-mar-07 6-Aug-08 10-Aug-08 521 MOTOR
CULEBRA 01-25 11-Apr-05 27-Jan-08 03-feb-08 1,021 MOTOR
SACHA 177D-01 04-jul-06 19-jun-08 22-jun-08 716 MOTOR
SACHA 153 06-jul-07 04-sep-08 06-sep-08 426 MOTOR
ANACONDA 01 16-Aug-06 27-Aug-08 30-Aug-08 742 MOTOR
Tabla 10. Equipos con falla directa del motor
Petroamazonas EP, Departamento de Producción
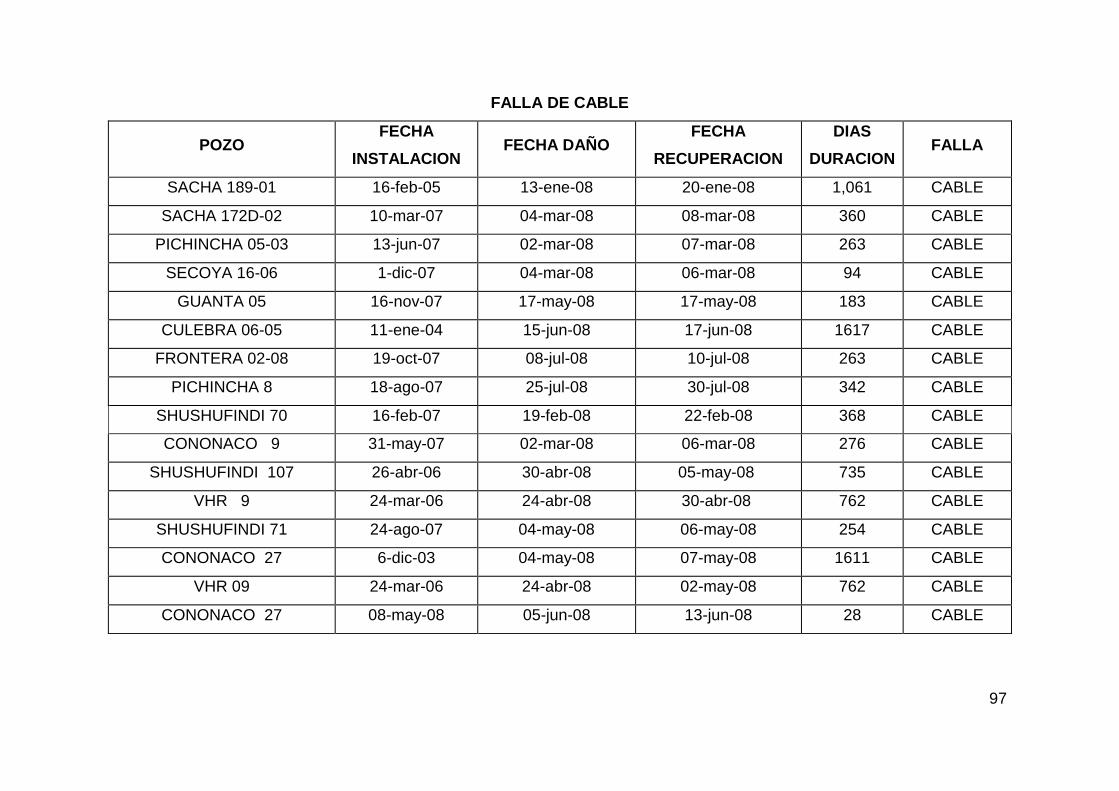
97
FALLA DE CABLE
POZO FECHA
INSTALACION FECHA DAÑO
FECHA
RECUPERACION
DIAS
DURACION FALLA
SACHA 189-01 16-feb-05 13-ene-08 20-ene-08 1,061 CABLE
SACHA 172D-02 10-mar-07 04-mar-08 08-mar-08 360 CABLE
PICHINCHA 05-03 13-jun-07 02-mar-08 07-mar-08 263 CABLE
SECOYA 16-06 1-dic-07 04-mar-08 06-mar-08 94 CABLE
GUANTA 05 16-nov-07 17-may-08 17-may-08 183 CABLE
CULEBRA 06-05 11-ene-04 15-jun-08 17-jun-08 1617 CABLE
FRONTERA 02-08 19-oct-07 08-jul-08 10-jul-08 263 CABLE
PICHINCHA 8 18-ago-07 25-jul-08 30-jul-08 342 CABLE
SHUSHUFINDI 70 16-feb-07 19-feb-08 22-feb-08 368 CABLE
CONONACO 9 31-may-07 02-mar-08 06-mar-08 276 CABLE
SHUSHUFINDI 107 26-abr-06 30-abr-08 05-may-08 735 CABLE
VHR 9 24-mar-06 24-abr-08 30-abr-08 762 CABLE
SHUSHUFINDI 71 24-ago-07 04-may-08 06-may-08 254 CABLE
CONONACO 27 6-dic-03 04-may-08 07-may-08 1611 CABLE
VHR 09 24-mar-06 24-abr-08 02-may-08 762 CABLE
CONONACO 27 08-may-08 05-jun-08 13-jun-08 28 CABLE

98
Continúa
POZO FECHA
INSTALACION FECHA DAÑO
FECHA
RECUPERACION
DIAS
DURACION FALLA
SHUSHUFINDI 96H 26-oct-07 03-jul-08 03-jul-08 251 CABLE
SHUSHUFINDI 91 17-oct-06 15-ago-08 17-ago-08 668 CABLE
SHUSHUFINDI 73 12-nov-07 26-ago-08 28-ago-08 288 CABLE
SHUSHUFINDI 59 15-ene-07 30-ago-08 02-sep-08 593 CABLE
Tabla 11. Equipos con falla directa del cable
Petroamazonas EP, Departamento de Producción
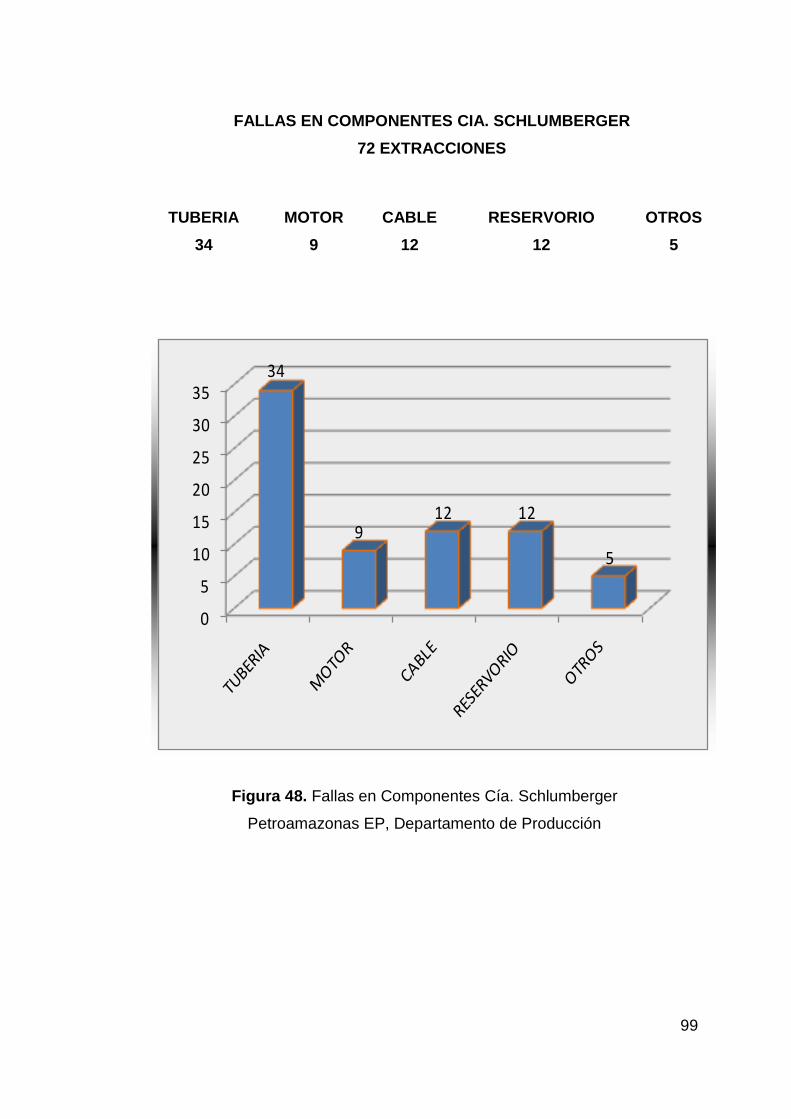
99
FALLAS EN COMPONENTES CIA. SCHLUMBERGER
72 EXTRACCIONES
TUBERIA MOTOR CABLE RESERVORIO OTROS
34 9 12 12 5
0
5
10
15
20
25
30
3534
912 12
5
Figura 48. Fallas en Componentes Cía. Schlumberger
Petroamazonas EP, Departamento de Producción

100
FALLAS EN COMPONENTES CIA. CENTRILIFT
44 EXTRACCIONES
TUBERIA MOTOR CABLE RESERVORIO BOMBA
27 4 8 4 1
0
5
10
15
20
25
30 27
4
8
41
Figura 49. Fallas en componentes Cía. Centrilift
Petroamazonas EP, Departamento de Producción
CAPÍTULO V

101
CAPÍTULO V
5. CONCLUSIONES Y RECOMENDACIONES
Una vez realizado este estudio se determinó lo siguiente:
5.1. CONCLUSIONES
Se cumplieron los objetivos específicos que tienen que ver con la
descripción de un sistema de levantamiento artificial eléctrico
sumergible y cada una de sus partes.
De igual manera, se realizó la descripción de la recomendación
práctica considerada para las pruebas de bombas electro sumergibles
y operaciones relacionadas con las mismas, de acuerdo a lo
dispuesto en las normas API.
En lo referente a la aplicación, se concluyó lo siguiente: el manejo,
transporte y almacenaje de los equipos se realizó de acuerdo al
procedimiento; todas las medidas de seguridad fueron tomadas no
sólo en fábrica, sino también en la locación. Las herramientas
utilizadas fueron las correctas y en general no existió ninguna mala
práctica. De las observaciones realizadas en esta área se obtuvo:
o La descripción de los procedimientos de instalación del equipo
BES
o Descripción del corrido y halado del equipo BES.
o Formas de reportes de halado de equipo. (contienen toda la
información necesaria y son fáciles de llenar y entender tanto
para el cliente como para el operador).

102
Cada pozo es diferente, y al producirse una falla en el sistema entra
mucho en juego el conocimiento y experiencia del operador; el tiempo
y el rendimiento de toda la operación dependerán de esto, así que es
necesario actuar con mucha responsabilidad y seguir los
procedimientos.
Todas las pruebas que se realizaron tanto a cables, secciones
sellantes y en especial las pruebas de desempeño que se llevaron a
cabo a las bombas fueron realizadas con los mejores equipos y la
más alta tecnología. También existió un alto control de calidad a cada
componente y se determinó que se encontraban en las mejores
condiciones eléctricas y físicas para su operación, por lo que todo el
procedimiento fue minuciosamente aplicado.
Se debe tener en cuenta que las etapas de una bomba están
diseñadas de tal manera que mantienen una fuerza de empuje axial
descendente en el impulsor en todo su rango de funcionamiento y
ésta fuerza puede variar desde un valor bajo en el punto de operación
máximo, con una fuerza de empuje creciente hacia el punto mínimo
de operación. Están diseñadas de esta manera para asegurar un
funcionamiento hidráulico estable. Por lo tanto, la bomba debe
funcionar dentro del rango de operación recomendado para
proporcionar una óptima vida útil. Las bombas que funcionan fuera de
este rango, tendrán una vida útil reducida y pueden tener un efecto
negativo en los otros componentes del sistema electro sumergible.
Se encontró grandes problemas al momento de transportar los
carretes de cable desde la fábrica a la locación o viceversa; los
carretes en la mayoría de veces no tuvieron cinta de seguridad en sus
extremos y no fueron envueltos con cinta plástica. Al llegar el cable a
su destino, se tiene que fue robado. No existió el debido control para
evitar este daño y al final nadie se hizo responsable.

103
En resumen, las recomendaciones prácticas consideradas para el
bombeo eléctrico sumergible de acuerdo a lo dispuesto en las normas
API se cumplieron en su mayoría. Los bajos rendimientos fueron
ocasionados por diversas razones tales como: el incumplimiento de
algunas normas, el mal diseño de un sistema, pero sobre todo por el
mal estado de los equipos que en su mayoría fueron reutilizados.
5.2. RECOMENDACIONES
Petroamazonas debería realizar los diseños para un determinado
pozo y éste ser enviado a la compañía prestadora de servicios para
que provea de los equipos requeridos.
Se debería analizar con más detenimiento si es conveniente o no el
adicionamiento o cambio de algún componente en el sistema ya
diseñado.
En el caso del robo de cable debería existir mayor control colocando
cinta plástica y un sello de seguridad en cada extremo del cable.
Adicional etiquetar correctamente los carretes con el tamaño del cable
y llevar un control más riguroso en el tiempo de transporte de los
carretes.
En todos los Teardowns a realizarse hay que notificar con varios días
de anticipación para poder tener un representante del cliente en dicha
operación y así conocer las causas del daño del equipo y poder tomar
las medidas correctivas entre ambas partes.
En pozos con producción de arena se debería instalar bombas en lo
posible de flujo mixto.

104
Se debe evitar instalar motores serie 562 en casing de 7” y menos en
pozos desviados por el riesgo de atascamiento de este housing
dentro del casing.
Se debería ser más rigurosos al momento de la aceptación de una
determinada bomba, ya que como vimos en los ejemplos, el rango
permisible en las pruebas de desempeño no es respetado en su
totalidad y esta condición puede reducir el rendimiento y desempeño
esperado en un sistema, lo que conllevará a una mayor probabilidad
de falla y por consiguiente un menor tiempo de vida del sistema.

105
BIBLIOGRAFÍA
Centrilift, (1996) Manual de operaciones de equipo de bombeo
eléctrico. Institucional
Weatherford, (2006) Electric Submersible Pumping Systems.
Institucional
API, (2000) Manual de Recomendaciones Prácticas para BES.
Institucional
REDA, (1995) Manual de bombeo eléctrico sumergible. Institucional
REDA, (2001) Curso avanzado de operaciones BES. Institucional
Bradley Howard, (1992) Spe Handbook, Texas, Institucional
ACE INTERNACIONAL, (2013) Curso BES para Operadores de
Producción, Manta, Institucional
Brown Kermit, (1980) The Technology of Artificial Lift Methods, Tulsa,
Institucional.
Cole Frank W, (1969) Reservoir Engineering Manual, Texas,
Institucional
Ing. Corrales Marco. (2003) Fundamentos de la ingeniería para el
levantamiento artificial con bombas electro sumergibles, Quito,
Universidad Tecnológica Equinoccial, Institucional
Baker Hughes, (1996) Manual de Bombeo Eléctrico Sumergible,
Institucional

106
NOMENCLATURA
API American Petroleum Institute
ESP Electrical Submersible Pump
VSD Variable Speed Controller
BES Bombeo Electro Sumergible
BHA Bottom Hole Assembly
BHT Bottom Hole Temperature
BMC Bombeo Mecánico Convencional
BCP Bombeo de Cavidad Progresiva
BH Bombeo Hidráulico
BPM Barriles por minuto
BPPD Barriles de petróleo por día
BSW Porcentaje de agua y sedimentos
csg Casing
DT Down thrust
ft Pie
GF Gas de formación
HP Horse power (caballo de poder)
hrs Horas
in Pulgada
IP – J Índice de productividad
IPR Relación de comportamiento de afluencia
min Minutos
Pc, Pwh Presión de cabeza
Pi Presión inicial
Pr Presión de reservorio
PSI Libras / pulgadas2
LAG Levantamiento Artificial por Gas
GOR Relación gas – petróleo
GLR Relación gas – liquido
Pb Presión de burbuja
107
Pwf Presión de fondo fluyente
PVT Presión, Volumen, Temperatura
TDH Total Dinamique Head
rpm Revoluciones por minuto
MOT Motor temperature
UT Up thrust
Hz Hertz
PIP Pump Intake Pressure
WHP Well Head Pressure
MLE Motor Lead Extension
KV Kilo vatios
EPDM Etileno Propileno Dienemetileno
108
GLOSARIO
Aislantes
Un aislante es una sustancia a través de la cual los electrones tienen gran
dificultad en desplazarse. Este tipo de materiales, como el caucho, vidrio,
algunos plásticos, fibra, y papel seco prácticamente no permiten que ningún
electrón fluya a través de ellos.
Altura de columna
La altura de columna puede también considerarse como la cantidad de
trabajo necesario para mover un líquido de su posición original a la posición
requerida.
Amperio
Un amperio es la tasa de flujo de una corriente eléctrica representada por el
movimiento de una cantidad unitaria de electrones por segundo.
Arenamiento
Introducción de arena en el equipo BES.
BES
Bombeo Electro sumergible.
Cavitación
Se puede definir como el proceso de formación de una fase gaseosa en un
líquido cuando es sujeto a una reducción de presión a una temperatura

109
constante. Un líquido se encuentra en cavitación cuando se observa la
formación y crecimiento de burbujas de vapor (gas) como consecuencia de
reducción en presión.
Centralizador
Los centralizadores son frecuentemente utilizados en aplicaciones del
sistema ESP para ubicar el equipo en el centro del pozo y son
especialmente útiles en pozos desviados, para eliminar el daño externo y
para asegurar la refrigeración uniforme del equipo. Hay varios tipos de
centralizadores disponibles en la industria diseñados para proteger al cable y
el equipo electro sumergible evitando la fricción con las tuberías del pozo.
Conductores
Un conductor es una sustancia que permite a los electrones fluir libremente a
través de ella. Cada sustancia es un conductor de electricidad, pero los
electrones fluyen más fácilmente a través de algunos materiales tales como
el oro, plata, cobre, hierro, y otros metales. Los alambres y los cables son
las formas más comunes de conductores.
Corriente
Cuando un potencial o voltaje de fuerza suficiente es aplicado a una
sustancia, causa el flujo de electrones. Este flujo de electrones se llama
corriente eléctrica. La cantidad de flujo de corriente se mide en amperios.
Corte de Agua
Es calculado en la superficie como el porcentaje del volumen de agua en
relación al volumen de los otros fluidos del pozo.
110
Eficiencia de un Motor
Es la relación entre la potencia obtenida y la potencia consumida y se
expresa generalmente como un porcentaje.
Potencia
Es la energía necesaria para mantener el flujo de corriente. La potencia
eléctrica se mide en vatios. 746 vatios son equivalentes a un caballo de
fuerza.
Presión
Es la fuerza por unidad de área de un fluido. Las unidades más comunes
para expresar a la presión son libras por pulgada cuadrada (psi) y Kg/cm2.
Presión Atmosférica
Es la fuerza ejercida en una unidad de área por el peso de la atmósfera. La
presión a nivel del mar es 14.7 psi.
Presión de Burbuja
La presión de burbuja de un hidrocarburo es la presión más alta a la cual las
primeras moléculas de gas salen de solución y forman una burbuja de gas.
Presión Manométrica
Es la presión diferencial indicada por un manómetro, a diferencia de la
presión absoluta. La presión manométrica y la presión absoluta están
relacionadas, siendo la presión absoluta igual a la presión manométrica más
la presión atmosférica.
111
Resistencia
La resistencia se puede comparar con la fricción encontrada por un flujo de
agua a través de una tubería.
Transformadores
Un transformador es un dispositivo en el cual el voltaje de un sistema de
corriente alterna puede cambiarse. Consiste en un núcleo de acero rodeado
por devanados de alambre aislado. Generalmente, tanto el núcleo como los
devanados están inmersos en aceite que sirve de aislador y ayuda a enfriar
el transformador.
Vatio
Un vatio es una unidad bastante pequeña de potencia; en consecuencia,
cuando se habla de la potencia requerida por los motores, se utiliza el
término kilovatio (KW), un kilovatio son mil vatios.
Voltaje
Es el trabajo requerido para mover una carga positiva de un Culombio desde
un terminal al otro a través del dispositivo. La unidad de tensión es el voltio
y se representa por V.
Vibración y Desgaste
La vibración se define como el movimiento de un cuerpo alrededor de un
punto de equilibrio. La vibración hacia los lados con respeto a la longitud del
equipo electro sumergible se denomina vibración lateral. La vibración que
tuerce el eje del equipo ESP es una vibración torsional. Puede ser el
resultado de fuerzas causadas por desbalances, por fricción entre partes o

112
fricción del fluido.
Válvula de Retención
Puede utilizarse una válvula de retención, generalmente ubicada de 2 a 3
tramos de tubería por encima de la descarga de la bomba, para mantener
una columna llena de fluido sobre la bomba. Si la válvula de retención falla -
o si no se instala - la pérdida de fluido de la tubería a través de la bomba
puede causar una rotación inversa de la unidad sub superficial cuando el
motor está parado.
Válvula de Drenado
Cada vez que se utilice una válvula de retención en la tubería de producción,
se recomienda instalar una válvula de drenado inmediatamente por arriba de
la válvula de retención para evitar la eventual remoción de la tubería con
todo el fluido contenido en él. Si no hay válvula de retención no hay razón
para que exista una válvula de drenado, ya que el fluido de la tubería por lo
general es drenado a través de la bomba cuando se realiza la remoción.

113
ANEXOS

114
ANEXO 01. Reporte de análisis de fallas
Estimulación ácida con HCl al 15% y solventes
Se evidencia que el equipo estaba manejando sólidos

115
ANEXO 02. Reporte de análisis de fallas
Reporte de servicio técnico en campo SSFD
Recomendación para analizar características del fluido producido

116
ANEXO 03. Reporte de análisis de fallas
Reporte de servicio técnico campo SSFD
Se detecta pozo operando con una fase a tierra

117
ANEXO 04. Reporte de análisis de fallas
Reporte de servicio técnico campo SSFD
Pozo a workover (bajo aislamiento + atascamiento de bombas)