unified computational schemes for incompressible and … · unified computational schemes for...
TRANSCRIPT

1
Unified Computational Schemes for Incompressible and Weakly Compressible Flows
I. J. Keshtiban, F. Belblidia and M. F. Webster*
Institute of Non-Newtonian Fluid Mechanics, Department of Computer Science,
University of Wales, Swansea, SA2 8PP, UK.
* Author for correspondence. Email: [email protected]

2
SUMMARY
A time-marching Taylor-Galerkin finite element algorithm, based on a pressure-correction
method with three fractional stages, is presented. The algorithm is applied in a consistent and
unified manner to weakly compressible and incompressible flows. For the compressible regime,
two types of density interpolation are investigated: a piecewise-constant form with gradient
recovery and a linear interpolation form. The background theory and consistency of the approach
are discussed. Numerical results are presented for high pressure-drop, 4:1 contraction flows,
under planar and axisymmetric frames of reference. Stability and accuracy of the method is
highlighted, bearing out the high quality of performance achieved for both compressible flow
density interpolation schemes, at low to vanishing Mach number. Primarily, we advocate the
piecewise-constant interpolation algorithm.
KEY WORDS: Finite element, Taylor-Galerkin, pressure-correction, compressible flow, zero Mach number.

3
1. INTRODUCTION
This paper presents a unified algorithmic framework to predict numerical solutions for flows that
range from incompressible to weakly compressible (at low Mach number). In this regard, we
commence from an existing software base dealing with incompressible flows, and incorporate
compressible considerations. This leads to a unified treatment for both incompressible and
weakly compressible flows. Initially, viscous Newtonian fluids are considered, for which recent
developments have advanced second-order accurate schemes (see Keshtiban et al. [1]). Briefly,
we provide some motivation for this study. In many flows, density may change with respect to
pressure, temperature and concentration. In fluid mechanics, Mach number characterise
compressibility effects conveying the ratio between fluid-speed and speed of sound ( cUMa = ).
For low Mach numbers (say less than 0.3), the flow regime may be considered as incompressible.
Beyond this regime at higher Mach numbers, compressibility effects should be taken into
account. At the singular limit of compressible flow, the equation system has time-scales of widely
varying magnitude, where sound waves travel at a much faster rate than those governing the
motion of the fluid. At low Mach number, Turkel [2] quotes the stiffness of the equation system
as being due to the large disparity between acoustic and convective time-scales.
Numerical computation at low Mach number poses a significant challenge. Yet, there are
several reasons to motivate the development of suitable methods to handle this regime. There are
many phenomena that occur at low Mach number, such as circulation in the oceans, bodily
functions of breathing and talking, free convection and combustion, recovery and exploration of
petroleum, liquid impact and jet cutting. Moreover, some flows contain both compressible and
incompressible regions, simultaneously. In such circumstances, some sections of the flow are

4
considered as incompressible with low Mach number, whilst other zones may prove somewhat
compressible. Second, it is preferable to work within a unified framework to handle wide ranges
of Mach number flow situations, including the incompressible limit (Ma0).
From a numerical standpoint, there are two principal methodologies commended to deal with
weakly compressible flows. One is to approach the problem based around compressible
algorithms. This leads to density-based schemes, which may be extended downwards in Mach
number to handle low Mach number situations. Alternatively, one may tackle the problem by
modifying incompressible algorithms, through say pressure-based schemes, leading outwards
from the Ma0 limit into the weakly compressible setting. With density-based methods, density
is the primary dependent variable extracted from the continuity equation, with pressure being
determined via an equation of state. With pressure-based methods, pressure is the primary
variable, so that density is the derived quality via the equation of state.
Density-based methods exhibit numerical shortcomings when dealing with low Mach number
flow situations (Ma<0.3). Under such setting, density variations are marginal and the continuity
equation effectively becomes decoupled from the momentum equation. Consequently, pressure
and density coupling is weakened. In addition, the relationship between velocity and pressure
may be defined via the divergence-free constraint on the velocity field. For high Mach number
regimes, pressure-density coupling is defined via an equation of state, with density given by the
continuity equation. However, Turkel [2] has recognized that, for the compressible flow equation
system, standard numerical schemes without modifications often fail to converge to the solution
of the incompressible equations, as the Mach number approaches zero. To extend density-based
schemes to deal with low Mach number situations and enhance solution convergence, two major
strategies have been proposed. The first appeals to preconditioning procedures, where the time
derivative of the governing equations is premultiplied by a suitable (preconditioning) matrix. This

5
scales the eigenvalues of the system to within similar order. A comprehensive review of
preconditioning methods may be found in Turkel [3]. The second strategy follows asymptotic
procedures, leading to a perturbed form of equations. Here, specific terms are discarded, so that
the physical acoustic waves are replaced by pseudo-acoustic modes [4].
Alternatively, pressure-based schemes represent extensions to pressure-correction or
projection methods [5] for incompressible flows. Projection methods were pioneered by Chorin
[6] and Temam [7]. These are a fractional-staged formulations, which decouple velocity and
pressure terms from the momentum equations, leading to an auxiliary Poisson equation for
pressure on each time-step (see Townsend and Webster [8] and Hawken et al. [9]). Such a
fractional-staged formulation is designed to significantly reduce computational overheads in
transient incompressible viscous flow computations, when using primitive variables [10].
Normally, projection methods are based on three distinguish stages over each time-step. First, the
momentum equation is employed to obtain an approximation of velocity. Second, pressure is
obtained as the solution to a Poisson equation. Third, velocity is corrected at a final stage. In
addition, projection methods have been employed within a finite volume context, through the
SIMPLE (Semi-Implicit-Pressure-Linked-Equation) family of methods, as first introduced by
Patankar [11] for incompressible flows. The extension of such pressure-based methods towards
compressible flows was proposed by Patankar [12], and later adapted by Isaa [13], Rhie [14],
Karki [15] and Mc-Gurik [16].
Donea [10] introduced a fractional-step formulation within a finite element context of
pressure-correction form. In addition, there is synergy between pressure-correction/fractional-
staged schemes and so-called Taylor-Galerkin schemes [17] for convection problems. This is due
to their common semi-discrete design philosophy, temporal preceding spatial discretization. The
ideology behind the Taylor-Galerkin methodology is to generate high-order accurate time-

6
stepping schemes, taking advantage of the high spatial resolution attainable, say via Galerkin
approximation. Taylor-Galerkin methods may be posed in various guises (of implicitness) and
normally incorporate Lax-Wendroff representation [18], within Taylor series expansions in time
to develop improved time-stepping schemes. Based on proposals of Van Kan [19], this was
recognised by Townsend and Webster in the viscoelastic context [8], who developed a finite
element Taylor-Galerkin/Pressure-Correction (TGPC) hybrid scheme to attain second-order
accuracy.
Having briefly reviewed density-based and pressure-based procedures applied to compressible
and incompressible flows, we turn attention to the development of a unified framework, to tackle
both flow scenarios. The specific nature of the flow equations is the starting point in developing
such a framework. One observes that these equations switch in type depending on flow setting.
For example, the equations for viscous compressible flow form a hyperbolic-parabolic system
with finite wave-speed, whilst those for incompressible flow assume an elliptic-parabolic system
with infinite propagation rates. Moreover, depending on local Mach number, in some regions
flow type is elliptic-dominant, whilst in other sections is hyperbolic-dominant. A unified
algorithm should reflect the capability to accommodate for such switch in type (on a local Mach
number basis). Based on this philosophy and under finite element considerations, Mittal [19]
developed a unified density-based algorithm. In this scheme, the governing equation for pressure
was selected based on local Mach number. In the incompressible limit, pressure was derived from
the divergence-free constraint. Alternatively, the equation of state governs the solution for
pressure in compressible flows. In the present study, we have found that pressure-based methods
are more attractive, circumventing the need to derive density as an intermediate variable and to
extract pressure.

7
A well known and successful unified approach to simulate incompressible, as well as
compressible regimes, was introduced by Zienkiewicz and co-workers. Here, a series of articles
[21-23] have appeared on the characteristic-based-split procedure (CBS), employed in the context
of finite element pressure-correction schemes. The process is practically identical to the TGPC
scheme, noting the essential difference that pressure gradient terms are omitted in the momentum
equation. Instead with the CBS-scheme, the pressure is employed as a source term at a third
fractional-equation stage. This separation of variables/equations (velocity from pressure) gives
rise to a number of positive attributes. One such, is that the Babuska-Bezzi stability restriction,
from the original Taylor-Galerkin procedure, no longer applies [20,21]. Hence, equal order and
convenient pressure-velocity interpolants are permitted†. One issue remains with the CBS-
scheme, that of imposition of boundary conditions for any given problem. This issue is somewhat
controversial in the application of fractional-staged schemes. In the CBS-scheme, boundary
conditions are not explicitly imposed upon the velocity field at the first fractional-equation stage.
Hence, velocity must be computed on the domain boundary. For viscous flow, for instance, this
leads to the computation of boundary integrals [21], which begs questions of discrete
representation. Boundary conditions upon pressure are imposed within the second fractional-
equation stage (representing continuity satisfaction). Noticeably, the CBS procedure has been
assessed across a number of different flow settings and found to perform satisfactorily. For
example, on transonic and supersonic flows, low Mach number flows with low and high
viscosity, and in addition, shallow-water wave flow problems.
† Within a viscous context, and particularly so in the viscoelastic regime, parabolic velocity profiles demand quadratic level interpolation in field representation for accuracy. This negates the need to lower the level of velocity interpolation, as secondary gradient field representation becomes all important.

8
In a recent article [1], an extension of an incompressible TGPC scheme has been proposed for
weakly compressible flows. There, stability and accuracy of both incompressible and weakly
steady compressible flows have been highlighted on some benchmark problems. The concern
behind the present study is to capture high quality of performance for compressible flow
algorithms, at low to vanishing Mach number. In this fashion, a unified scheme is constructed
around existing incompressible algorithms and associated software. The base formulation-
framework proposed (TGPC), may be viewed as a pressure-correction scheme split into three
distinct, fractional-stages. At a first stage (doublet equation-set), the momentum equation is
utilised to predict the velocity field at a half-stage. Subsequently, the momentum equation is
employed to compute the velocity at a full-step (Lax-Wendroff style, two-step Taylor-Galerkin
phase). The second stage solves for temporal difference in pressure on the time step (conveying
second-order to the scheme and some additional attractive boundary condition options [19]). The
third stage completes the time-step loop for velocity correction, utilising the non-solenoidal
velocity field intermediate variable generated. In contrast with the CBS technique, in our TGPC
approach, pressure gradients are not omitted from the momentum equation, so that, physical
boundary conditions are applied in a conventional manner (i.e. via tractions). In both fractional-
staged schemes (TGPC and CBS) and by construction, the equations are able to accommodate
switch of equation-type depending on local Mach number. In our TGPC unified implementation
for compressible flow, we represent density variation through pressure via a suitably extended,
well-established Tait equation of state [24]. Two types of finite element interpolation of density
are employed to handle the weakly compressible regime: a piecewise-constant form
(incompressible per element), with recovery for density gradients (during the second-stage); and
a linear interpolation form. We have demonstrated in our earlier studies that these key

9
modifications do not degrade second-order accuracy of the original incompressible TGPC
scheme.
The present paper is organized as follows: the governing equations for compressible viscous
flows are expounded in Section 2. In Section 3, we introduce the equation stages for the Taylor-
Galerkin/pressure-correction scheme, followed by the finite element (FE) discretization adopted.
In Section 4, the method is applied and a sample of results is presented for a benchmark test-
problem. Here, we consider planar and circular 4:1 contraction flow under isothermal viscous
conditions. The schemes proposed are validated for consistency in terms of mesh refinement.
Comparison between incompressible and compressible regimes for vanishing Mach number are
conducted, highlighting the attractive properties of this proposed unified scheme.
2. GOVERNING EQUATIONS
For a compressible viscous flow under isothermal conditions, governing equations for transport
of momentum and mass conservation may be expressed in dimensionless form, viz
]..[ PUURt
Ue ∇−∇−∇=
∂∂ ρτρ (1)
( ) 0=∇+∂∂
U.Rt e ρρ
(2)
where ρ , U , τ , P represent dimensionless dependent variables of density, velocity, stress and
pressure. Dimensionless independent variables are t and x, representations of time and space,
respectively. The dimensionless group Reynolds number is defined as:
o o
e
U LR
ρµ
= . (3)

10
Such dimensionless form is obtained by introducing characteristic scales on density 0ρ , viscosity
µ , length L (exit half-channel width), and velocity U0 (exit flow, average velocity). Note, for
incompressible flow with constant density, the continuity equation reduces to: 0=∇ U. .
For compressible flow, a third equation relating density to pressure is required. In the case of
liquids, the modified Tait [24] equation of state is adopted of the form:
m
BP
BP
=
++
00 ρρ
(4)
where, m and B are scalar parameters and oP , oρ denote reference scales for pressure and
density, respectively. Note, in a strict sense, Eq.(4) is exact only for isentropic change.
Nevertheless, it may be applied to reasonable precision in the general case, since m is
independent of entropy, and B and oρ are constants [25]. In the present analysis, the energy
equation has been discarded, as we are interested in low Reynolds number isothermal flows,
where kinetic considerations are negligible.
After rearranging and differentiating the equation of state, we gather:
( ) 2),(
0
01 )(tXm
m cBPmBP
mP =+=
+=
∂∂ −
ρρρ
ρ (5)
where ),( tXc represents the speed of sound.
To address spatial discretisation, a finite element representation is applied, as outlined below.

11
3. TAYLOR-GALERKIN/PRESSURE-CORRECTION SCHEME
AND FE DISCRETIZATION
In order to outline the TGPC-scheme, we first indicate the constructive steps to follow in the
incompressible context. Then, it is a straightforward matter to provide the necessary steps to
adjust to the compressible TGPC-version. To begin, we may consider the semi-discrete
incompressible equation system,
( ) nnn
e
nn
PPUURt
UU ∇−−∇−∇−∇=∆
− +++
θθρτρα
1]..[ 121
(6a)
.0. 1 =∇ +nU (6b)
We observe that ( 0,0 == θα ) yields an explicit-form momentum equation (first-order).
Alternatively, ( 21,1 == θα ) provides Crank-Nicolson pressure-gradient discretisation and the
need for a half-step solution in ( ) 2
1
, +nUτ . This is now of second-order form (see Van Kan [19]).
The term at level 2
1+n
t may be evaluated through a the two-step predictor-corrector structure, as in
Taylor-Galerkin schemes. The pressure gradient terms may be regrouped as,
[ ] nnn PPP ∇−∇−∇− +1θ (7)
and handled via splitting of terms across pressure-correction stages. Retaining only nP∇ within
the first stage and utilizing the two-step doublet realises,
stage 1a
nne
nn
PUURt
UU ∇−∇−∇=∆
−+
]..[2/
2
1
ρτρ (8)

12
stage 1b
nn
e
n
PUURt
UU ∇−∇−∇=∆− +
2
1
]..[* ρτρ . (9)
In Eq.(9) we have introduced U* as an auxiliary free-variable, a non-solenoidal velocity
variable, utilised to extract the omitted difference term on pressure gradient, and to realise a third
fractional-stage equation
( )nnn
PPt
UU −∇−=∆
− +∗+
11
θρ . (10)
Here, Un+1 satisfies Eq.(6b). By taking the divergence of Eq.(10), one takes advantage of
Eq.(6b) and forms the second-stage Poisson equation for pressure, as
( ) ( )*12 . UPPt nn ρθ −∇=−∇∆ + . (11)
In summary, when applying the TGPC-scheme to the governing equations for viscous
incompressible flows, three fractional-staged equations emerge. In stage 1a –Eq.(8)-, a half time-
step velocity field at (n+1/2) is predicted, based on the previous time-step (n) information
(prediction stage). This is followed by a full-step correction at stage 1b –Eq.(9)- to calculate the
auxiliary free variable U*. This is utilised in stage 2 –eq(11)- through a Poisson equation, to
determine pressure-difference over the full time-step, (n) to (n+1). At stage 3 –Eq.(10)-, the
incompressible end-of-loop velocity field is extracted, based on the pressure-difference and the
non-divergence-free velocity (final correction stage). The TGPC-scheme consists of Eq.(8), (9),
(11) and (10), in that order on each time-step.
Note, that the momentum equations for compressible and incompressible flows are identical
(bar variation in density), whilst differences emerge due to the various alternative forms of the
continuity equation. The compressible continuity equation, semi-discretised in time assumes the
form

13
( ) 0. 11
=∇+∆− +
+nn
e
nn
URt
ρρρ. (12)
To extend the incompressible TGPC-version into the compressible context, only modification
at stage 2 is necessary. Oncemore, appealing to Eq.(10) and taking the divergence operation, we
gather
( ) ( )nnn PPtUU −∇∆−=−⋅∇ ++ 12*1 θρρ , (13)
which may be introduced within Eq.(12) to provide
).()( *121
1 UPPtt
R nnnnn
e ρθρρ −∇=−∇∆−∆
− ++
− . (14)
To progress further for compressible flow, it is necessary to switch reference from density to
that of pressure. In order to accomplish this, we employ the chain rule on the derived form of the
Tait equation of state in Eq.(5), gathering
t
P
ct tX ∂∂=
∂∂
2),(
1ρ. (15)
Finally, after semi-discretising in time, we substitute Eq.(15) into Eq.(14) to realise a modified
temporal evolutionary expression for pressure. This form may be employed at stage 2 replacing
Eq.(11), in the context of compressible flows. The corresponding equation now becomes:
Stage 2:
).()(1 *12
1
2),(
UPPtt
PP
cRnnn
nn
tXe
ρθ −∇=−∇∆−∆
− ++
. (16)
Note, Eq.(16) adopts an important role in the development of the compressible flow algorithm.
It displays some interesting features: the first term on the left-hand-side is a first-order time
derivative representation, whilst the second term is governed by a Laplacian operator (elliptic
properties). In addition, on the right-hand-side, density is a direct function of pressure (to be

14
interpreted via the equation of state). When the flow is incompressible, speed of sound
asymptotes to infinity. In this context, the first term as the right-hand-side vanishes and elliptic
character dominates in Eq.(16). Alternatively, for compressible flows, depending upon the Mach
number level (local compressibility), the balance of type-domination within the equation adjusts
between elliptic and hyperbolic.
A FE Galerkin spatial discretization is adopted, leading to approximations of primary variables
( ),U x t and ( ),P x t in the velocity and pressure fields, respectively. These are taken over
triangular elements of reference, as follows:
)()(),( xtUtxU jj φ= , j=1,6 and )()(),( xtPtxP kk ψ= , k=1,3, (17)
where interpolant notation implies, ( )xφ , as continuous quadratic and, ( )xψ , as piecewise linear
on the triangular elements. Time-dependent velocity and pressure nodal-vectors are represented
as U and P, respectively. Depending on the treatment of diffusion terms (in the momentum
equation), the scheme may be developed in explicit form (=0), where care must be taken in
choosing appropriate size of time-step, or include some implicitness, by say semi-implicit Crank-
Nicolson representation (=1/2). The treatment of diffusion terms may be represented via:
nnnn
τττταα
.2
... 2 ∇+∇−∇=∇
++. (18)
To enhance stability of the scheme, the semi-implicit scheme is adopted and the discretized
equation for compressible TGPC stages may be expressed in fully-discrete matrix form as:

15
Stage 1a:
[ ]nTU
n
U PLUUNUSUSt
M−+−=
∆
+
∆+
)(2
1
2/2
1
ρρ (19)
Stage 1b:
( ) [ ] [ ] 2
1* )(
2
1 +−−−=∆
+
∆nnT
UU UUNPLUSUSt
Mρ
ρ (20)
Stage 2:
( ) *11 ULPKtt
MR nC
eρθ −=∆
∆+
∆+− (21)
Stage 3:
( ) 1*11 ++ ∆=−∆
nTn PLUUMt
θρ (22)
where, in the case of planar coordinates, matrix notation implies:
( ) Ω= Ω
dM jiijφφρρ (23)
( ) Ω
Ω∇⋅= dUN jiij)( φρφρ (24)
( ) Ω∇⋅∇= Ω
dK jiij ψψ (25)
( ) ( ) Ω⋅∇= Ω
dLkjiijk φψ (26)
( ) ( ) 2,1,, == mlSS ijlmijU (27)
( ) Ω
∂∂
⋅∂∂−
∂∂
⋅∂∂+
∂∂
⋅∂∂=
Ω
dxxyyxx
S jijijiij
φφφφφφµ32
211 (28)
( ) Ω∂
∂⋅
∂∂
= Ω
dxy
S jiij
φφµ12 (29)

16
( ) Ω
∂∂
⋅∂∂
−∂
∂⋅
∂∂
+∂
∂⋅
∂∂
= Ω
dyyyyxx
S jijijiij
φφφφφφµ3
2222 . (30)
These matrices replicate those for incompressible flow with the exception of the diffusion
matrix, where an extra term is appended
∂∂
⋅∂∂
−xx
jiφφ
3
2 within S11, and
likewise
∂∂
⋅∂∂
−yy
jiφφ
3
2 in S22, arising as a direct consequence of compressibility.
From a computational standpoint, main modification has arisen at stage 2, by the introduction
of the two new matrices CM and ρL governed by compressibility considerations. These matrices
are defined as:
( ) Ω= Ω
dc
M)t,X(
jiijC 2
ψψ, (31)
( ) Ω
∂∂
+∂∂
= Ω
dxx
Lk
jlljl
k
liijk
φρψφρψψρ . (32)
Integrals may be evaluated analytically, or by Gauss quadrature, over each triangular finite
element. Piecewise-constant density interpolation over an element and piecewise-linear
interpolation are introduced for density interpolation. Note, in expression (32) for (Lρk) matrix,
when piecewise-constant density interpolation on the element is employed, the first term of the
expression will vanish, leading to an incompressible elemental representation. In this instance at
stage 2, some form of recovery may be incorporated on density. This will assign density nodal
corner values and continuous interpolation thereby. The modifications accruing at stage 2 result
in improvement of the system condition number of the augmented stiffness matrix. This is
brought about via introduction of the mass-matrix, and allows for larger time steps overall.

17
The difference between the CBS procedures and our implementation lies mainly in the
treatment of pressure terms. With the CBS-scheme, the pressure-gradient term is discarded from
stage 1, and evaluated by design at stage 3, where it is treated as a source correction-term. The
imposition of consistent boundary conditions introduces complications. In the application of
fractional-step methods, this issue is somewhat controversial. In our implementation, the issue is
circumvented through the freedom of choice of the auxiliary variable U*. One can choose
1+∗ = nUU on the domain boundary, which simplifies the treatment of boundary conditions for the
pressure-difference 1+∆ nP of stage 2. Hence, in steady flow situations, homogeneous Newman
conditions are imposed on temporal pressure-difference (and not pressure itself) at stage 2.
Finally, both CBS and TGPC-schemes demonstrate the ability to accommodate for switch-of-
equation type, according to localised Mach number levels encountered at stage 2 (see Eq.(16)). In
addition, an iterative preconditioned Jacobi solver is adequate to compute each fractional-stage.
That is, with exception of the temporal pressure-difference equation (stage 2), which is solved
through a direct Choleski procedure.
4. NUMERICAL EXAMPLES
For isothermal viscous flows, a contraction flow problem is employed to quantify the behaviour
of these unified schemes within low Mach number regimes. The total length of the channel is
76.5 units and the contraction ratio is 4:1. Both planar and axisymmetric geometric settings are
considered (see Figure 1). No-slip boundary conditions are assumed on solid boundaries. At
flow-entry, we consider a parabolic flow profile for longitudinal velocity, with its maximum set
to unity; the cross-sectional component vanishes. At the outlet, a natural condition is adopted on

18
longitudinal velocity and the cross-sectional component again vanishes. At the outlet, a pressure
reference is set to zero. Note, only the half-geometry of the channel is employed in these
simulations taking advantage of problem symmetry. Reynolds number (Re) is set to unity. There
are two variant of the unified scheme depending on the density implementation employed
(constant within the finite element, with recovery of the gradients, or linear). Our strategy in the
present study has been to adjust the values of the Tait parameter pairing (m, B), to alter the type
of flow under consideration.
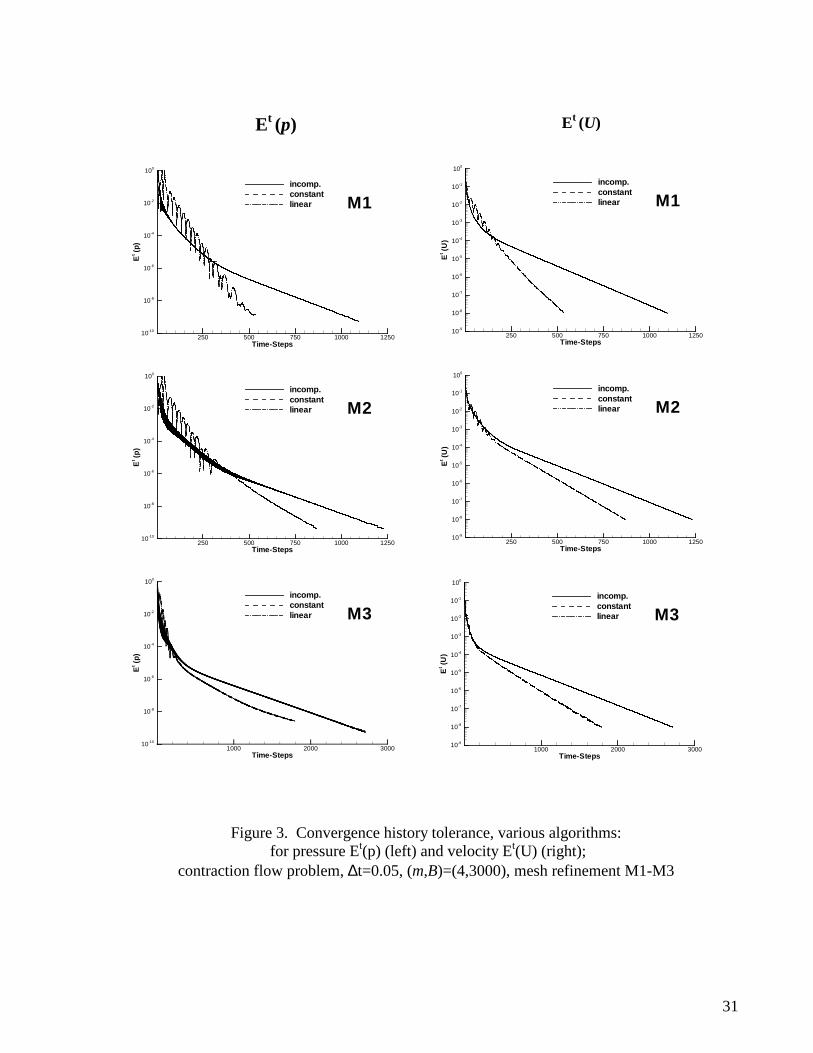
First, the unified framework is assessed with respect to time-stepping convergence history and
spatial accuracy properties. For this purpose, a multi-block meshing strategy is employed to
discretized the half-contraction channel-geometry, with conformal mapping in each sub-block
and matching of boundary nodes at interfaces. Three different meshes M1, M2 and M3 with
different levels of refinement are employed. The meshes are illustrated in Figure 2 and their
characteristics are quantified in Table I∗. We have need to define a temporal relative-increment
L2-norm to govern time-stepping convergence history (history tolerance) as:
1
1
)(+
+ −=
n
nn
t
X
XXXE . Results for convergence history tolerance on pressure (Et(p)) and
velocity (Et(U)) are displayed in Figure 3. This covers three different meshes and algorithmic
variants. The Tait parameters are set to (m,B)=(4,3000). As one suppresses error in the velocity
field through mesh refinement, one also controls the oscillatory evolutionary patterns for error-
history in pressure. This is anticipated, since convergence in pressure is constrained in a
Lyapunov norm, see Van Kan [19].
∗ Details are recorded for total numbers of elements, nodes, degree of freedom, corner mesh density and minimum element size (see Matallah et al. [26] and Baloch et al. [27]).
19
Figure 4 illustrates pressure and stream function fields, with their associated contour levels,
for the three meshes. In this figure only piecewise-constant density interpolation results are
illustrated (see below). In Table II, values of pressure and vortex information are given at the
contraction (sample location highlighted by a cross ‘+’ in Figure 1). Table III illustrates values
for velocity (Ux, Uy) at the same location. Note that from Tables II and III, for the same
compressibility setting, the piecewise-constant and the linear density interpolations deliver
similar results for a particular mesh size. The associated contour plots are smoother on finer
meshes. Note, that mesh M2 is felt adequate for detailed coverage below. In addition, mesh M2
was able to highlight the salient corner vortex and is less computationally expensive compared to
the finest mesh M3.
4.1. Planar contraction flow
This example is introduced to demonstrate algorithmic consistency in representing behaviour for
a high pressure-drop situation, which reflects excessive compressibility effects. All simulations
are based on mesh M2 (Figure 5a). The first two sets of figures present the adjustment of
different variables (velocity, pressure, density and Mach number) for piecewise-constant (Figure
6) and linear density interpolations (Figure 7) around the contraction zone. A highly compressible
flow situation is considered through (m,B)=(2,300). To present the results, sampled spatial
locations are selected and shown in Figure 5b. Numerical solutions are presented at these
sampled spatial locations for the two cases to demonstrate the difference in the results. As
presented in Table IV on sampled locations, similar variable contour patterns (at equitable levels)
are observed for both compressible representations around the contraction. In Mach number,
contour field plots reflect some differences, according to the choice of density interpolation

20
employed. This is because the Mach number is related to speed of sound, which itself is linked
directly to density, via the Tait equation. Hence, the level of density interpolation comes into
play. Therefore, under piecewise-constant density interpolation, Mach number contours are non-
smooth over elements of large size (see Figure 5a).
Next, a comparison of both density interpolation schemes is conducted with (m,B)=(4,300).
Figure 8 presents solution profiles for different variables at the contraction channel centreline for
both schemes. The results provide clear evidence that low-order density interpolation with
gradient recovery, is able to reproduce results comparable to those with linear density
interpolation. Near the exit, a discrepancy of about ten percent is observed in Mach number, with
those for constant density interpolation being higher than those for the linear interpolation
alternative. This departure is due mainly to the adjustment in both velocity and pressure across
the exit zone, and to some degree to the mesh quality there (see Figure 5a).
Finally, the ability of the compressible algorithm to deal with a wide range of low Mach
number (0<Ma<0.3) is highlighted. Figure 9 presents trends in solution profiles for different
variables at the contraction channel centreline, based on variation in compressibility settings,
adjusting Tait parameters accordingly. These trends reflect adjustment from the incompressible
towards the mildly compressible setting. In the compressible regime, only piecewise-constant
density interpolation has been employed, as both constant and linear representations lead to
practically identical results. Centreline solution profiles indicate that the compressibility setting
has little affect on the velocity field before the contraction. As the flow becomes more
compressible, some affect is visible beyond this zone once the liquid accelerates. At flow-entry,
pressure and density are larger for compressible flow. This highlights how much
‘compressibility’ impacts upon the flow kinematics.

21
4.2. Axisymmetric contraction flow
The previous example is reconsidered, but under an axisymmetrical frame of reference. In this
case, pressure-differences exceed those for the Cartesian equivalent. A principal goal here is to
demonstrate the ability of these compressible implementations to deal with incompressible flows
(Ma0). Hence, to demonstrate effective use of compressible algorithmic implementations to
simulate weakly compressible, as well as incompressible flows, through a unified schema. To the
same end, stability characteristics of the algorithm are quantified under different compressibility
parameters settings.
First, as above for planar flow, we confirm that similar trends are observed in field variables
based on both compressible algorithmic variants (see figures 6 and 7). In Figure 10, solution
profiles are presented for different variables at the contraction channel centreline for both forms
of density interpolation. Tait parameters are set to (m,B)=(5,3000), leading to mild
compressibility influences. Again, for this case, the results demonstrate that low-order density
interpolation with gradient recovery is comparable to that for linear interpolation.
In Figure 11, trends in solution profiles for different variables at the contraction channel
centreline are provided. Tait parameters are set, varying from those for incompressible towards
mildly compressible conditions. For the compressible regime, only piecewise-constant density
interpolation results are displayed. Similar solution trends are observed when compared to
Cartesian results.
After outlining the overall behaviour of the three algorithmic implementations
(incompressible, piecewise-constant and linear density interpolation) within a unified framework,
we turn attention to algorithmic stability. In particular, we conduct a parameter sensitivity

22
analysis to assess variation with the compressibility parameter set (m,B). Here, based on
piecewise-constant density interpolation, convergence history tolerances for pressure (Et(p)) and
velocity (Et(U)) are adopted to characterise stability. In Figure 12, plots of pressure and velocity
convergence history tolerances are presented, based on various Tait parameters settings. Note that
large values in the Tait parameter pairing are set for incompressible flow. For the three plots to
the left, the m-parameter is held constant (m=10), whilst the B-parameter varies from 105
(incompressible, top plot) down to 103 (compressible, bottom plot). For the three plots to the
right, the B-parameter is held constant (B=104), and m varies from 103 (incompressible, top plot)
down to 5 (compressible, bottom plot). The plots highlight the fact that the compressible
algorithm is more stable, in particular within the incompressible flow regime setting. Stability for
pressure is more difficult to assess when compared to velocity, due to the physics of the flow and
to the fractional-staged procedure (second stage). Nevertheless by design, the present approach
will ultimately fail to simulate highly compressible flow, as this would necessitate consideration
of the kinetic equation (which is neglected here).
Finally, the challenging issue of the present study is considered: addressing the effectiveness
of the unified scheme to deal with very low Mach number situations. For this, the Tait parameters
are elevated to high levels (m=102 or 103 and B=105), and one observes improvement in stability
and convergence-rate of the compressible implementations. That is, in comparison to the
convergence of the incompressible flow algorithm, as illustrated in Figure 13. This is attributed to
improvement in system condition number, via inclusion of the stage 2 mass-matrix, permitting
the use of larger time steps. Results for this particular case are tabulated in Table IV. The data
highlight the match in sample solution values between incompressible and compressible (with Ma
0) algorithmic implementations, in all variables and over different zones for the contraction

23
flow benchmark. By setting high-level Tait parameter pairings, a zero Mach number limit may be
approached. Once again, results demonstrate that, in the zero Mach number limiting regime,
piecewise-constant density interpolation, with recovery of gradients during the second stage, is
equitable to linear density interpolation. Based on these findings, we have established that the
compressible algorithmic implementations may be employed effectively to simulate weakly
compressible, as well as incompressible flow scenarios. Hence, we have established the required
unified framework, the object of the present study.
5. CONCLUSION
Two algorithmic implementations have been investigated to simulate weakly compressible liquid
flows, within a triangular-based finite element representation. The first employs a piecewise-
constant density interpolation with recovery to compute density-gradients. The second algorithm
utilises linear interpolation for density. These algorithmic variants have been implemented within
the context of a fractional-staged, Taylor-Galerkin approximation within a pressure-correction
scheme.
A high pressure-drop, 4:1 contraction flow, under planar and axisymmetric setting, has been
employed to analyse consistency and accuracy of both implementations. Both forms perform in a
similar fashion, leading to comparable levels of accuracy. The convergence-rate of both
algorithms has improved over that for the incompressible implementation. This is attributed to
improvement in system condition number via mass-matrix inclusion at the second-stage, thus
allowing for larger time-steps overall.

24
These compressible algorithmic variants have been shown capable of simulating flow with
low to zero Mach number (incompressible regime). Based on these compressible algorithmic
implementations, a zero Mach number limit has been reached by adjusting Tait parameter
parings. In this manner, compressibility effects within the liquid flow are controlled, to approach
the incompressible limit. Under such circumstances, results match well those for the compressible
algorithm and those for the ‘purely’ incompressible algorithm. These findings allow the user to
apply the compressible algorithm in a unified manner for both compressible and incompressible
regimes.
The proposed compressible algorithms have been implemented effectively within an
incompressible software-base. This is made straightforward with piecewise-constant density
interpolation, using recovery for density-gradients and density scaling for elemental matrices.
Finally, the piecewise-constant density interpolation option is preferred to the linear density
counterpart. They both perform equally, displaying similar properties of accuracy and stability,
yet the piecewise-constant option is the more efficient in implementation.
ACKNOWLEDGEMENTS
The financial support of EPSRC grant GR/R46885/01 is gratefully acknowledged.
25
REFERENCES
1. Keshtiban IJ, Belblidia F and Webster MF. Second-order schemes for weakly steady
compressible liquid flows. submitted to J. Comput. Physics. 2003.
2. Turkel E. Preconditioned methods for solving the incompressible and low speed
compressible equations. J. Comput. Physics. 1987; 72: 277-298.
3. Turkel E. Review of preconditioning methods for fluid dynamics, Technical Report 92-47,
Institute for computer applications in science and engineering, NASA Langley Research
center, September 1992.
4. Choi YH, Merkle CL. The application of preconditioning in viscous flows. J. Comput.
Physics. 1993; 105: 207-223.
5. Peyret R, Taylor TD. Computational Methods for Fluid Flow, Springer-Verlag, New York,
1983.
6. Chorin AJ. Numerical solution of the Navier-stokes equations. Math. Comp. 1968; 22: 745-
762.
7. Temam R. Sur l’approximation de la solution de Navier-Stokes par la méthode des pas
fractionnaires. Archiv. Ration. Mech. Anal. 1969; 32: 377-387.
8. Townsend P and Webster MF. An algorithm for the three-dimensional transient simulation
of non-Newtonian fluid flows, in Transient/Dynamic Analysis and Constitutive Laws for
Engineering Materials, Int. Conf. Numerical Methods in Engineering: Theory and
Applications - NUMETA 87", eds. G.N. Pande and J. Middleton, Nijhoff, Kluwer,
Dordrecht, 1987; vol 2: T12/1-11.

26
9. Hawken DM, Tamaddon-Jahromi HR, Townsend P and Webster MF. A Taylor-Galerkin
based algorithm for viscous incompressible flow. Int. J. Num. Meth. Fluids. 1990; 10:
327-351.
10. Donea J, Giuliani S, Laval H, and Quartapelle L. Finite element solution of the unsteady
Navier-Stokes equations by fractional step method. Meth. Appl. Mech. Engng. 1982; 30:
53-73.
11. Patankar SV and Spalding DB. Heat and Mass Transfer in Boundary Layer, 2nd edition,
Morgan-Grampian, London, 1970.
12. Patankar SV. Calculation of unsteady compressible flows involving shocks. Report
UF/TN/A/4, Imperial College, 1971.
13. Isaa RI, Lockwood FC. On the prediction of two-dimensional supersonic viscous
interactions near walls. AIAA Journal. 1977; 15: 182-188.
14. Rhie CM, Stowers ST. Navier-Stokes analysis for high-speed flows using a pressure
correction algorithm. AIAA Paper: 87-1980, 987.
15. Karki KC and Patankar SV. Pressure-based calculation procedure for viscous flows at all
speeds in arbitrary configurations. AIAA Journal.1989; 27 (9) :1167-1174.
16. Mc-Gurik JJ, and Page GJ. Shock-capturing using a pressure correction method. AIAA
Journal. 1989; 28 (10): 1751-1757
17. Donea J. A Taylor-Galerkin method for convective transport problems. Int. J. Numer.
Meth. Engng. 1984; 20: 101-120.
18. Lax P and Wendroff B. Systems of conservation laws. Comm. Pure Applied Math. 1960;
XII I : 217-237.
19. Van Kan J. A second-order accurate pressure-correction scheme for viscous
incompressible flow. SIAM J. Sci. Stat. Compt. 1986; 7: 870-891.

27
20. Mittal S, Tezduyar TE. A unified finite element formulation for compressible and
incompressible flows using augmented conservation variables. Computer Methods in
Applied Mechanics and Engineering. 1998; 161: 229-243.
21. Zienkiewicz OC, Condina R. A general algorithm for compressible and incompressible
flow - Part I: The split characteristic-based scheme. Int. J. Num. Meth. Fluids. 1995; 20:
869-885.
22. Zienkiewicz OC, Morgan K, Sataya Sal BVK, Codina R and Vasquez M. A general
algorithm for compressible and incompressible flow - Part II: Test on the explicit form.
Int. J. Num. Meth. Fluids. 1995; 20: 887-913.
23. Zienkiewicz OC, Nithiarasu P, Codina R, Vazquez M and Ortiz P. The characteristic-
based-split procedure: An efficient and accurate algorithm for fluid problems. Int. J. Num.
Meth. Fluids. 1999; 31: 359-392.
24. Tait PG, HMSO, London, 1888; 2(4).
25. Brujan EA. A first-order model for bubble dynamics in a compressible viscoelastic liquid.
J. Non-Newt. Fluid Mech. 1999; 84: 83-103.
26. Matallah H, Townsend P and Webster MF. Recovery and stress-splitting schemes for
viscoelastic flows. J. Non-Newt. Fluid Mech. 1998; 75: 139-166.
27. Baloch A, Townsend P and Webster MF. On the simulation of highly elastic complex
flows. J. Non-Newt. Fluid Mech. 1995; 59 (2/3): 83-106.

28
List of figures
Figure 1. Contraction flow schema
Figure 2. Mesh refinement around the contraction, M1-M3, (mesh characteristics in Table I)
Figure 3. Convergence history tolerance, various algorithms: for pressure Et(p) (left) and velocity Et(U) (right); contraction flow problem, ∆t=0.05, (m,B)=(4,3000), mesh refinement M1-M3
Figure 4. Pressure contours (right) and streamlines contours (left) for contraction flow, piecewise-constant density interpolation scheme, (m,B)=(4,3000), mesh refinement M1-M3. (values in Table II)
Figure 5a. Mesh M2 for contraction flow at different zones: entrance, contraction and exit
Figure 5b. Sample point locations on mesh M2
Figure 6. Velocity Ux, pressure, density and Mach number contours around contraction plane, (m,B)=(2,300), piecewise-constant density interpolation, mesh M2
Figure 7. Velocity Ux, pressure, density and Mach number contours around contraction plane, (m,B)=(2,300), linear density interpolation, mesh M2
Figure 8. Solution profiles at channel centreline (planar case), piecewise-constant and linear density interpolation, Tait model parameters: (m,B)=(4,300). Top Left: velocity, Top Right: pressure, Bottom Left: density, Bottom Right: Mach number
Figure 9. Variation in compressibility settings, mildly compressible towards incompressible, trends in solution profiles on channel centreline (planar case), piecewise-constant density interpolation. Top Left: Ux-velocity, Top Right: pressure, Bottom Left: density, Bottom Right: Mach number
Figure 10. Solution profiles at channel centreline (axisymmetric case), piecewise-constant and linear density interpolation, Tait model parameters: (m,B)=(5,3000). Top Left: velocity, Top Right: pressure, Bottom Left: density, Bottom Right: Mach number
Figure 11. Variation in compressibility settings, mildly compressible towards incompressible, trends in solution profiles on channel centreline (axisymmetric case), piecewise-constant density interpolation. Top Left: UZ-velocity, Top Right: pressure, Bottom Left: density, Bottom Right: Mach number
Figure 12. Effect of Tait parameters (m,B) on convergence history of pressure Et(p) and velocity Et(U), piecewise-constant density interpolation, increasing compressibility effect, axisymmetric case. Left: decreasing B, Right: decreasing m
Figure 13. Convergence history tolerance for velocity Et(U) and pressure Et(p), axisymmetric case. Left: piecewise-constant, Right: linear

29
Figure 1. Contraction flow schema
7.5 27.5
76.5
1
UX=0, UY=0
UY=0
P=0, UX free, UY=0
UX=0,UY=0
4
YX
+

30
Figure 2. Mesh refinement around the contraction, M1-M3 (mesh characteristics in Table I)
M1
M3
M2
31
Figure 3. Convergence history tolerance, various algorithms: for pressure Et(p) (left) and velocity Et(U) (right);
contraction flow problem, ∆t=0.05, (m,B)=(4,3000), mesh refinement M1-M3
Et (p) Et (U)
Time-Steps
Et(p
)
1000 2000 300010-10
10-8
10-6
10-4
10-2
100
incomp.constantlinear M3
Time-Steps
Et(p
)
250 500 750 1000 125010-10
10-8
10-6
10-4
10-2
100
incomp.constantlinear M2
Time-Steps
Et(p
)
250 500 750 1000 125010-10
10-8
10-6
10-4
10-2
100
incomp.constantlinear M1
Time-Steps
Et(U
)
250 500 750 1000 125010-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
incomp.constantlinear M1
Time-Steps
Et(U
)
250 500 750 1000 125010-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
incomp.constantlinear M2
Time-Steps
Et(U
)
1000 2000 300010-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
incomp.constantlinear M3

32
Figure 4. Pressure contours (right) and streamlines contours (left) for contraction flow, piecewise-constant density interpolation scheme,
(m,B)=(4,3000), mesh refinement M1-M3 (values in Table II)
Pressure Stream function
1234
5
56
67
7
Level P7 410.966 410.845 410.744 410.383 408.972 396.481 388.75
M1
123
4
5
56
67
7
Level P7 410.936 410.835 410.734 410.323 408.982 396.091 387.05
M2
1234
5
5
66
7
7
Level P7 410.936 410.835 410.734 410.323 408.982 396.091 387.05
M3
3
4
5
6Level S6 1.6x10+00
5 7.0x10-01
4 1.8x10-01
3 4.0x10-03
2 -1.0x10-04
1 -2.0x10-042
3
4
5
6Level S6 1.8x10+00
5 8.5x10-01
4 2.5x10-01
3 4.0x10-03
2 -1.0x10-04
1 -2.0x10-04
3
4
5
6Level S6 1.6x10+00
5 7.0x10-01
4 1.8x10-01
3 4.0x10-03
2 -1.0x10-04
1 -2.0x10-04

33
Figure 5a. Mesh M2 for contraction flow at different zones: entrance, contraction and exit
Figure 5b. Sample point locations on mesh M2
(entrance) (exit) (contraction)
X
Y
15 200
1
2
3
4
* b
* a* c
* d
* e * f

34
Figure 6. Velocity Ux, pressure, density and Mach number contours around contraction plane, (m,B)=(2,300),
piecewise-constant density interpolation, mesh M2
1
1
3
5 7 8
Level U8 4.0007 2.5006 1.2005 1.0004 0.9003 0.6002 0.2001 0.020
1
5
6
3
67
5
Level P8 507.557 507.356 507.205 507.154 506.503 500.002 465.001 435.00
13
5
5
66
8
Level DEN8 1.64077 1.64056 1.64045 1.64034 1.63983 1.62022 1.59001 1.5600
1
3
57
Level MACH8 0.1357 0.1206 0.0455 0.0324 0.0283 0.0212 0.0091 0.001
Level UX
Level P
Level Ma
Level
8
8

35
Figure 7. Velocity Ux, pressure, density and Mach number contours around contraction plane, (m,B)=(2,300),
linear density interpolation, mesh M2
1
3
5 7 8
Level U8 4.007 2.506 1.205 1.004 0.903 0.602 0.201 0.02
13
5
56 6 7
Level P8 508.367 508.156 508.005 507.934 507.303 500.002 465.001 442.00
1
1
3
5 7
Level MACH8 0.1337 0.1206 0.0455 0.0324 0.0283 0.0212 0.0091 0.001
1
5
56
6
3
8
Level DEN8 1.64157 1.64136 1.64125 1.64114 1.64043 1.62502 1.60001 1.5700
Level UX
Level P
Level Ma
Level
8
8

36
Figure 8. Solution profiles at channel centreline (planar case), piecewise-constant and linear density interpolation,
Tait model parameters: (m,B)=(4,300). Top Left: velocity, Top Right: pressure, Bottom Left: density, Bottom Right: Mach number
X (centerline)
UX
-vel
ocity
0 10 20 30 40 50 60 700.5
1
1.5
2
2.5
3
3.5
4
4.5
5
constantlinear
UX
X (centerline)
Pre
ssur
e
0 10 20 30 40 50 60 700
50
100
150
200
250
300
350
400
450
500
constantlinear
P
X (centerline)
Den
sity
0 10 20 30 40 50 60 701
1.05
1.1
1.15
1.2
1.25
1.3
constantlinear
X (centerline)
Mac
hnu
mbe
r
0 10 20 30 40 50 60 700
0.05
0.1
0.15
0.2
constantlinear
Ma
P
Ma
UX

37
Figure 9. Variation in compressibility settings, mildly compressible towards incompressible, trends in solution profiles on channel centreline (planar case),
piecewise-constant density interpolation. Top Left: Ux-velocity, Top Right: pressure, Bottom Left: density, Bottom Right: Mach number
X (centerline)
UX
-vel
oci
ty
0 10 20 30 40 50 60 70
1
2
3
4
5
6
7
Incomp.B=3x104 m=10B=3x103 m=10B=3x102 m=4B=3x102 m=2
UX
X (centerline)
Den
sity
0 10 20 30 40 50 60 700.9
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
B=3x104 m=10B=3x103 m=10B=3x102 m=4B=3x102 m=2
X (centerline)
Pre
ssur
e
0 10 20 30 40 50 60 700
100
200
300
400
500
600
incomp.B=3x104 m=10B=3x103 m=10B=3x102 m=4B=3x102 m=2
P
X (centerline)
Mac
hn
um
ber
0 10 20 30 40 50 60 70
0
0.1
0.2
0.3
B=3x104 m=10B=3x103 m=10B=3x102 m=4B=3x102 m=2
Ma
P
Ma
UX

38
Figure 10. Solution profiles at channel centreline (axisymmetric case), piecewise-constant and linear density interpolation,
Tait model parameters: (m,B)=(5,3000). Top Left: velocity, Top Right: pressure, Bottom Left: density, Bottom Right: Mach number
Z (Centerline)
UZ
-vel
ocity
0 10 20 30 40 50 60 700
2
4
6
8
10
12
14
16
18
20
ConstantLinear
UZ
Z (Centerline)P
ress
ure
0 10 20 30 40 50 60 700
500
1000
1500
2000
2500
3000
3500
ConstantLinear
P
Z (Centerline)
Den
sity
0 10 20 30 40 50 60 70
1
1.05
1.1
1.15
1.2
ConstantLinear
Z (Centerline)
Mac
hn
um
ber
0 10 20 30 40 50 60 70-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
ConstantLinear
Ma
P
Ma
UZ

39
Figure 11. Variation in compressibility settings, mildly compressible towards incompressible, trends in solution profiles on channel centreline (axisymmetric case),
piecewise-constant density interpolation. Top Left: UZ-velocity, Top Right: pressure, Bottom Left: density, Bottom Right: Mach number
Z (Centerline)
Den
sity
0 10 20 30 40 50 60 70
1
1.05
1.1
1.15
1.2B=3x104 m=10B=3x103 m=10B=3x103 m=5
Z (Centerline)
UZ
-vel
oci
ty
0 10 20 30 40 50 60 700
2
4
6
8
10
12
14
16
18
20
Incomp.B=3x104 m=10B=3x103 m=10B=3x103 m=5
UZ
Z (Centerline)
Pre
ssur
e
0 10 20 30 40 50 60 700
500
1000
1500
2000
2500
3000
3500
Incomp.B=3x104 m=10B=3x103 m=10B=3x103 m=5
P
Z (Centerline)
Mac
hn
um
ber
0 10 20 30 40 50 60 70
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
B=3x104 m=10B=3x103 m=10B=3x103 m=5
Ma
P
UZ
Ma

40
Figure 12. Effect of Tait parameters (m,B) on convergence history
of pressure Et(p) and velocity Et(U), piecewise-constant density interpolation, increasing compressibility effect, axisymmetric case.
Left: decreasing B, Right: decreasing m
Time-Steps
Et (P
),E
t (U)
100 200 300 400 500 600 700 80010-10
10 -8
10 -6
10 -4
10 -2
100
PressureVelocity
B=104 , m=10
Time-Steps
Et (P
),E
t (U)
100 200 300 400 500 600 700 80010-10
10-8
10-6
10-4
10-2
100
PressureVelocity
B=104 , m=103
Time-Steps
Et (P
),E
t (U)
200 400 600 80010-10
10 -8
10 -6
10 -4
10 -2
100
PressureVelocity
B=105 , m=10
Time-Steps
Et (P
),E
t (U)
100 200 300 400 500 600 700 80010-10
10-8
10-6
10-4
10-2
100
PressureVelocity
B=104 , m=102
Time-Steps
Et (P
),E
t (U)
100 200 300 400 500 600 700 80010 -10
10 -8
10 -6
10 -4
10 -2
100
PressureVelocity
B=103 , m=10
Time-Steps
Et (P
),E
t (U)
500 100010-10
10-8
10-6
10-4
10-2
100
PressureVelocity
B=104 , m=5

41
Figure 13. Convergence history tolerance for velocity Et(U) and pressure Et(p), axisymmetric case.
Left: piecewise-constant, Right: linear
Time-Steps
Et(U
)
100 200 300 400 500 600 700 800 900
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
Incomp.B=105, m=103
B=105, m=102
Piece-wiese constant
Time-Steps
Et(p
)
100 200 300 400 500 600 700 800 900
10-9
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
Incomp.B=105, m=103
B=105, m=102
Piece-wiese constant
Time-Steps
Et(p
)
100 200 300 400 500 600 700 800 900
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
Incomp.B=105, m=103
B=105, m=102
Linear
Time-StepsE
t(U
)
100 200 300 400 500 600 700 800 900
10-8
10-7
10-6
10-5
10-4
10-3
10-2
10-1
100
Incomp.B=105, m=103
B=105, m=102
Linear
Et(U) Et(U)
Et(p) Et(p)

42
List of tables Table I. Mesh characteristic parameters
Table II. Sample pressure values at contraction and vortex information, various meshes and
different algorithms (B=3x103, m=4)
Table III. Sample velocities (Ux,Uy) values at contraction, various meshes and different
algorithms (B=3x103, m=4)
Table IV. Results for velocity, pressure, density and Mach number at sampled spatial locations, for piecewise-constant and linear density interpolations
Table V. Sampled variable values, various algorithms at zero Mach number (axisymmetric
problem)

43
Table I. Mesh characteristic parameters
M1 M2 M3
Elements 980 1140 2987
Nodes 2105 2427 6220
Vertex Nodes 563 644 1617
d.o.f. 8983 9708 14057
Rmin 0.024 0.023 0.011
Corner mesh density 28 63 201

44
Table II. Sample pressure values at contraction and vortex information,
various meshes and different algorithms (B=3x103, m=4)
M1 M2 M3
Incompressible 393.6 393.5 393.5
-Constant 400.4 400.4 400.3 Pressure
-Linear 400.4 400.4 400.4
Smin at vortex (-10-3) -Constant 0.324 0.449 0.414

45
Table III. Sample velocities (Ux,Uy) values at contraction,
various meshes and different algorithms (B=3x103, m=4)
M1 M2 M3
Ux Uy Ux Uy Ux Uy
Incompressible 2.957 0.520 2.956 0.516 2.969 0.518
-Constant 2.953 0.533 2.954 0.526 2.971 0.523
-Linear 2.953 0.533 2.954 0.526 2.971 0.523

46
Table IV. Results for velocity, pressure, density and Mach number at sampled spatial locations,
for piecewise-constant and linear density interpolations
Ux -velocity Pressure Density Mach number Sample points -constant -linear -constant -linear -constant -linear -constant -linear
a 0.596 0.596 507.38 508.16 1.641 1.641 0.0188 0.0188
b 0.948 0.948 507.36 508.14 1.641 1.641 0.0294 0.0302
c 0.621 0.621 507.08 507.86 1.640 1.641 0.0212 0.0212
d 0.098 0.098 507.30 508.08 1.640 1.641 0.0041 0.0041
e 2.985 2.985 493.98 494.77 1.627 1.628 0.0918 0.0974
f 3.080 3.079 458.52 459.29 1.590 1.591 0.1009 0.0997

47
Table V. Sampled variable values, various algorithms at zero Mach number (axisymmetric problem)
Compressible
m=103, B=105 m=102, B=105
Variable Z- position
Incompressible
-Constant -Linear -Constant -Linear
Contract. 11.4690 11.4149 11.4149 11.4145 11.4145
52.0 15.9999 16.0002 16.0002 16.0026 16.0026 Uz
Exit 15.9999 16.0004 16.0004 16.0048 16.0049
Entry 3249.87 3249.47 3249.47 3249.99 3249.99
Contract. 3170.96 3171.26 3171.26 3171.77 3171.77 Pressure
52.0 1535.99 1536.03 1536.03 1536.38 1536.38
Entry 1.00000 1.00003 1.00003 1.00032 1.00032
Contract. 1.00000 1.00003 1.00003 1.00031 1.00031 Density
52.0 1.00000 1.00005 1.00005 1.00015 1.00015
Entry 0.0000 9.84e-5 9.84e-5 0.0003 0.0003
Contract. 0.0000 0.0011 0.0011 0.0036 0.0036
52.0 0.0000 0.0016 0.0016 0.0052 0.0052
Mach
Exit 0.0000 0.0016 0.0016 0.0051 0.0051